teorie elektronických obvodů Jiří Petržela řešení nelineárních obvodů
|
|
|
- Simona Kadlecová
- před 5 lety
- Počet zobrazení:
Transkript


1 Jiří Petržela
2 vlastnosti lineárních obvodů přechodný děj obvodu je vždy tlumený, trvá omezenou dobu a je dán jeho vlastnostmi, počátečními podmínkami a buzením ustálený stav nezávisí na počátečních podmínkách spektrum signálu na výstupu obvodu je stejné jako spektrum signálu na vstupu platí princip superpozice, na kterém jsou založeny všechny efektivní metody analýzy těchto obvodů
3 vlastnosti nelineárních obvodů neplatí princip superpozice změna spektra zpracovávaných signálů (přesun energie ve spektru) na výstupu jsou jiné kmitočtové složky než na vstupu existence několika ustálených stavů, přičemž který ze stavů nastane závisí na počátečních podmínkách daný ustálený stav dává možnost usoudit o stavu obvodu v minulosti (paměť a hystereze)

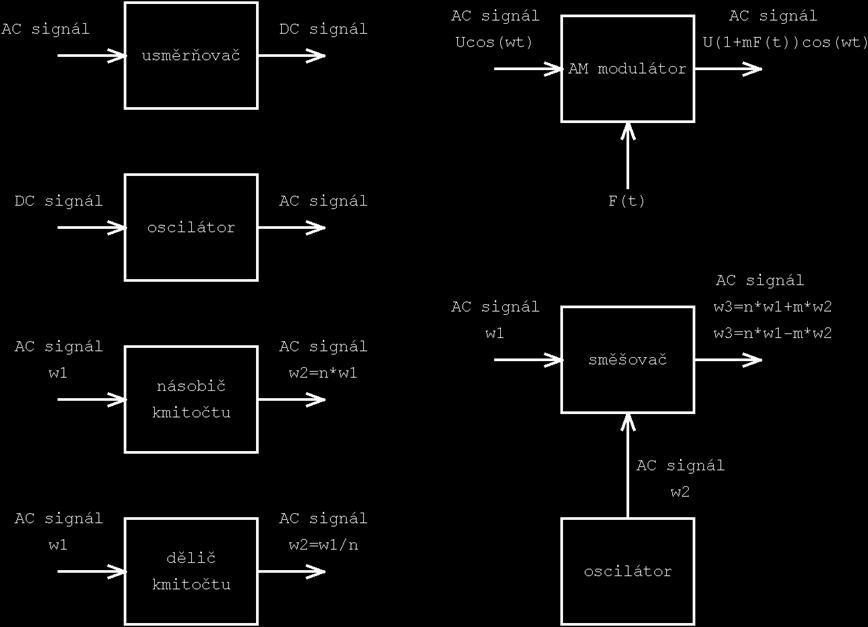
4 Obr. 1: Různé druhy nelineárních obvodů.
5 parametry nelineárního dvojpólu nebo dvojbranu statický parametr P diferenciální parametr diferenční parametr = y x P = P d Δ = Q = d y d x Δ Δ y x Y X Q Q 0 0



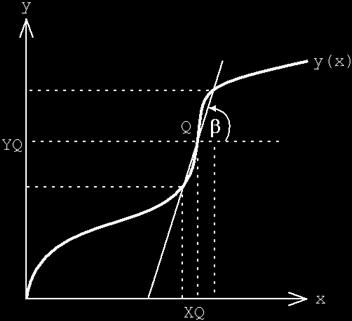
6 Obr. 2: Grafická interpretace jednotlivých parametrů dvojpólu nebo dvojbranu.
7 parametry řízeného dvojpólu nebo dvojbranu jeden statický parametr z= Z tři diferenciální parametry ( x, z) y f P ( x, z) = = = x x P ( x z) z= Z Y X ( x, z) d y d f, = = Z d x d x d = z= Z 0 z= Z 0 0 Z 0 0 K d ( x, z) = d y d z x= X 0 = d ( x, z) f d z x= X 0


8 A d ( x, z) = d x d z tři diferenční parametry P Δ, A Δ, K Δ dostaneme záměnou diferencí za derivace, tedy Δ d y Y = 0 = K P d d Obr. 3: Parametry řízeného dvojpólu nebo dvojbranu.
9 odlišnosti metod pro neexistuje žádná univerzální metoda používají se přibližné metody je-li to možné provedeme linearizaci postup analýzy seznámení se s funkcí obvodu z kvalitativního hlediska analýza obvodu vedoucí k získání nejdůležitějších parametrů
10 simulace a modelování nelineárního obvodu na počítači používané metody grafické graficko-početní analytické numerické


11 metoda tří rovin FT Obr. 4: Relativnost pojmů velký a malý signál, lineární záležitost.


12 FT Obr. 5: Relativnost pojmů velký a malý signál, uplatní se nelinearita.


13 Obr. 6: Konstrukce výsledné charakteristiky dvou nelineárních rezistorů.
")

14 první bod (A) přímky je dán u N = 0 i = u / R a pro druhý bod (B) přímky platí in = 0 un = u Obr. 7: Demonstrace metody zatěžovací přímky.


15 převodní charakteristika zatěžovací přímka pracovní charakteristika Obr. 8: Odvození pracovní charakteristiky mezi vstupem a výstupem.
16 analytické metody výsledek řešení je analytický výraz v obecném tvaru řešení pro libovolné parametry i počáteční podmínky soustava nelineárních diferenciálních rovnic představuje matematicky náročný problém, často neřešitelný snaha po zjednodušování
17 pro využití analytických metod potřebujeme popis nelineárních charakteristik vhodnými výrazy aproximace charakteristik analytický zápis budícího signálu x(t) řešením získáme časový průběh odezvy y(t) lze provést harmonickou analýzu výstupního signálu Y(ω), tímto určujeme spektrum
18 setrvačný nelineární obvod je obecně popsán 2 d x d x F x,, 2 d t d t,..., n d x n d t u buzených obvodů je tato rovnice nehomogenní = 0 u autonomních obvodů je čas nezávislou proměnnou vyšších řádů je obtížné, proto se snažíme na úkor přesnosti vyšší derivace zanedbat a řešení zjednodušovat
19 principy zjednodušování řešení princip kompenzace (viz přednáška 1) princip rozštěpování uzlů princip rozpojování zkratů aplikací Théveninova teorému (viz přednáška 1) aplikací Nortonova teorému (viz přednáška 1)


20 Obr. 9: K principu rozštěpování uzlů a rozpojování zkratů.
21 další principy využitelné při řešení idealizace jednodušší výpočtové schéma linearizace (eliminace nelineárních prvků) úplná eliminace akumulačních prvků statický model náhrada nelineárních akumulačních prvků modelem rozklad obvodu a jeho postupné řešení po částech rozklad řešení na kmitočtová pásma


22 Obr. 10: Princip postupného řešení, směr od zátěže.
23 princip rozkladu na kmitočtové pásma pro každé kmitočtové pásmo řešíme obvod zvlášť pomocí odpovídajících zjednodušených modelů nejčastější je rozdělení na tři pásma oblast nízkých kmitočtů oblast středních kmitočtů oblast vysokých kmitočtů


24 příklad na řešení tranzistorového zesilovače v zapojení se společným emitorem rozkladem na kmitočtová pásma obvod obsahuje vazební i parazitní kapacity Obr. 11: Schéma zapojení jednostupňového tranzistorového zesilovače.


25 prvek pásmo 1 pásmo 2 pásmo 3 pásmo 4 pásmo 5 C v ponechat zkrat zkrat zkrat zkrat C e rozpojit rozpojit ponechat zkrat zkrat C be rozpojit rozpojit rozpojit rozpojit ponechat C bc rozpojit rozpojit rozpojit rozpojit ponechat C p rozpojit rozpojit rozpojit rozpojit ponechat Obr. 12: Kmitočtová závislost modulu přenosu tranzistorového zesilovače.
26 analytické metody metoda stavových proměnných metoda linearizace diferenciálních rovnic metoda ekvivalentní linearizace metoda pomalu se měnící amplitudy izokliny (graficko-početní metoda) simulace obvodů na počítači (numerická metoda)
27 metoda stavových proměnných hlavní stavové rovnice vedlejší stavové rovnice d s = f d t x = f ( s,, t) 1 y ( s,,t) 2 y rychlost změny stavů vektor stavových proměnných vektor obvodových veličin vektor budicích veličin
28 stavy a děje v elektronickém obvodě stavem rozumíme souhrn hodnot obvodových veličin v určitém časovém okamžiku děj je posloupnost stavů, které za sebou následují v čase pracovní bod je obrazem stavu stavová trajektorie je obrazem děje výchozí Pv a klidový Pk pracovní bod specifikuje začátek a konec děje


29 Obr. 13: Definice pracovního bodu a limitního cyklu.


30 Obr. 14: Přehled typických stavových portrétů dynamických systémů 2. řádu.
31 metoda linearizace diferenciálních rovnic spočívá v aproximaci charakteristiky nelineárního prvku několika na sebe navazujícími přímkami přechod od nelineární diferenciální rovnice k několika lineárním stavový prostor je rozdělen na lineární oblasti, pro každou oblast platí jiná rovnice dílčí rovnice se často liší pouze hodnotami koeficientů získanou soustavu rovnic lze řešit analyticky některou ze známých metod
 p + 1i t = U 0 C a v druhém úseku nabíjení")

32 v prvním úseku od A do B platí diferenciální rovnice 1 i() t dt + U R () p + 1i t = U 0 C a v druhém úseku nabíjení kondenzátoru platí 1 i() t dt + R () 2i t = U 0 C u=r 1 i+up Obr. 15: Příklad k metodě linearizace diferenciálních rovnic.
33 metoda ekvivalentní linearizace spočívá v náhradě nelineárního odporu R N fiktivním lineárním s modifikovaným (středním) odporem R S definovaným poměrem amplitud prvních harmonických R S = U = ( ) 1 / I1 f I1 parametr R S je závislý na velikosti budící veličiny a poloze pracovního bodu obdobně jsou definovány i jiné parametry, například modifikovaná strmost, přenosová admitance nebo kapacita platí zde princip harmonické a energetické rovnováhy


34 z charakteristik je patrný rozdíl mezi diferenciálním P d a středním P S parametrem Obr. 16: Ke kvazilineární metodě.


35 Obr. 17: Příklad aplikace kvazilineární metody v prostředí Mathcadu.


36 metoda pomalu se měnících amplitud amplituda kmitů se mění pomalu ve srovnání s časovou konstantou obvodu hledáme časovou změnu amplitudy místo změny okamžitých hodnot snížíme řád rovnice Obr. 18: K metodě pomalu se měnících amplitud.


37 dynamický vs. statický model hledáme obvodové veličiny za předpokladu, že se mění velmi pomalu derivace podle času rovny nule náhrada induktoru zkratem a kapacitoru rozpojením větve dil duc ul = L = 0 ic = C = 0 dt dt Obr. 19: Náhrada nelineárního setrvačného obvodu statickým obvodem.
38 obvod lze popsat soustavou diferenciálních rovnic ( ) ( ) ( ) / / = + = + = + dt di L R i u u i u i dt du u C R u u R u i po zjednodušení dostáváme ( ) ( ) / / = + = = + R i u u i u i R u u R u i této soustavě rovnic odpovídá rezistivní obvod
39 numerické řešení sestavíme stavové rovnice (soustava diferenciálních rovnic) k řešení využíváme programy typu Matlab a Mathcad, jejichž vestavěné funkce využívají iterační předpisy nelineární obvod je popsán rovnicí F ( x) = 0 řešení musí konvergovat k hledanému kořenu x obecný rekurentní předpis x = k + 1 Ψ k, [ x F( x) ]
40 numerické řešení výpočet ukončíme, když rozdíl výsledků následujících posledních kroků je menší než dovolená chyba numerické metody Pickardova iterace metoda regula-falsi xk + 1 xk iterace Newton-Raphsonova Δ


41 postup při numerickém řešení uvažovaný nelineární obvod rozdělíme na lineární podobvod a nelineární odpor R N lineární část nahradíme Théveninovým ekvivalentem Obr. 20: K řešení nelineárního obvodu iteračními postupy.

42 Pickardova iterace iterační předpis je x k +1 = x k F ( x ) k pro zajištění konvergence musí bod U 3 ležet mezi U 1 a U 2 zdroj proudu řízený z předchozího kroku Obr. 21: K řešení nelineárního obvodu Pickardovým iteračním postupem.
 ( x ) metoda je vždy")
 k Obr.")
43 iterace regula-falsi (metoda sečen) iterační předpis lze zapsat ve tvaru x0 x xk + 1 = xk F x F k ( ) ( x ) metoda je vždy konvergentní, ale pomalejší statický odpor z předchozího kroku 0 k F ( x ) k Obr. 22: K řešení nelineárního obvodu iteračním postupem regula-falsi.
 ( ) k nejpoužívanější")

44 iterace Newton-Raphsonova (metoda tečen) iterační předpis můžeme vyjádřit jako F xk xk +1 = xk F x ( ) ( ) k nejpoužívanější metoda, rychlá, existuje několik modifikací dynamický odpor a zdroj napětí Obr. 23: K řešení nelineárního obvodu Newton-Raphsonovou metodou.
45 řešení setrvačných nelineárních obvodů obvody mohou obsahovat i nelineární akumulační prvky vede na integraci nelineárních diferenciálních rovnic integrační metody explicitní implicitní pracují na principu náhrady derivací diferencemi
46 metody zjištění hodnoty určitého integrálu obdélníková metoda lichoběžníková metoda Simpsonova metoda nejpoužívanější integrační metody Eulerova, jednokroková nebo modifikovaná Runge-Kuttova, přesnost výpočtu podle řádu
47 Eulerova metoda n+ 1 = yn + h ( x y ) y f, je to metoda jednoduchá, ale nepřesná n n využívá extrapolaci přímkou je zde podobnost s lichoběžníkovou metodou kvůli možné numerické nestabilitě je v programu vhodná implementace automatické změny délky kroku chyba metody je přibližně 2 Δ h
48 modifikovaná Eulerova metoda k k y 1 2 = = n+ 1 h h = y f f n ( x, y ) n ( x + h / 2, y + k / 2) + n k 2 n n 1 jednokrokové metody vyšších řádů rozšiřují Eulerovu metodu o další stupně Taylorova rozvoje funkce aproximace y n+1 je určena nejen na základě hodnot x n a y n, ale také na hodnotách mezi nimi chyba metody je přibližně 3 Δ h
49 Runge-Kuttova metoda čtvrtého řádu ( ) ( ) ( ) ( ) 6 / 3 / 3 / 6 /, 2 / 2, / 2 / 2, /, k k k k y y k y h x f h k k y h x f h k k y h x f h k y x f h k n n n n n n n n n n = + + = + + = + + = = + nejpoužívanější metoda, obsahuje ji Matlab i Mathcad chyba metody je přibližně 5 Δ h
50 příklad na usměrňovač s kapacitní zátěží obvod popíšeme stavovou rovnicí charakteristika diody je dána exponenciálou i d = I ( ( ) ) 9 exp a u 1 I = 10 a 40 0 d 0 = optimální velikost kroku integrace je kompromisem mezi přesností a rychlostí výpočtu zjistíme experimentálně se zvyšující se kapacitou na výstupu se zmenšuje zvlnění výstupního napětí a zvyšuje jeho střední hodnota




51 parametry diody stavovou proměnnou je napětí na kondenzátoru počáteční podmínka vstupní signál Obr. 24: Implementace Eulerovy integrační metody v prostředí Mathcadu.


52 h= h=10-5 h=10-6 Obr. 25: Důsledky špatné volby kroku Eulerovy integrační metody, Mathcad.


53 Obr. 26: Jednocestný usměrňovač s C=100μF, C=4μF a C=500nF, Mathcad.


54 lineární rezistor počáteční napětí na kapacitoru numerická integrace vestavěnou funkcí Obr. 27: Typické časové průběhy lineárního obvodu prvního řádu v Mathcadu.


55 nelineární rezistor řízený napětím hodnota kapacitoru integračního článku neharmonické odezvy pro různé počáteční podmínky Obr. 28: Stavové portréty nelineárního obvodu prvního řádu v Mathcadu.




56 nelineární rezistor řízený proudem stavovými proměnné i L a u C počáteční podmínky pro i L a u C Obr. 29: Skript pro výpočet časových průběhů stavových veličin v Mathcadu.


57 buzení impulsem harmonické buzení Obr. 30: Stavové portréty lineárního obvodu 2. řádu pro R=100Ω, Mathcad.


58 buzení impulsem harmonické buzení Obr. 31: Stavové portréty lineárního obvodu 2. řádu pro R=10Ω, Mathcad.


59 Obr. 32: Stavové portréty nelineárního obvodu druhého řádu, Mathcad.




60 Obr. 33: Skript pro výpočet časových průběhů stavových veličin v Mathcadu.


61 Obr. 34: Skript pro výpočet časových průběhů stavových veličin v Mathcadu.



62 po částech lineární rezistor reálné hodnoty součástek Obr. 35: Skript pro výpočet časových průběhů stavových veličin v Mathcadu.


63 Obr. 36: Stavové portréty chaotického Chuova oscilátoru v Mathcadu.
64 působení harmonických zdrojů na nelineární rezistor v nelineárních obvodech vzniká změna tvaru signálu změna spektra (přesun energie ve spektru) i ve spektrální oblasti lze popsat chování obvodu možnosti určení spektrální odezvy analyticky, při aproximaci nelineárních charakteristik numericky obvodový simulátor Pspice, Microcap programy typu Matlab nebo Mathcad
65 používané typy aproximací pro kmitočtovou odezvu lomená přímka výstupním signálem jsou oříznuté části harmonického signálu na vstupu nelineárního prvku spektrální složky výstupního signálu jsou funkcemi úhlu otevření, tedy I n =α n (φ)i m grafické vyjádření této závislosti je Schulzův diagram, průběhy vykazují extrém (optimum)
66 používané typy aproximací pro kmitočtovou odezvu mocninové polynomy rekurentní vztahy exponenciálou Besselovy funkce prvního nebo n-tého řádu možnosti praktického využití nelineárních obvodů při působení více harmonických zdrojů různých kmitočtů na nelineární prvek mohou vznikat kombinační kmitočty ω = k ω + k ω i k n ω n


67 Obr. 37: Průběhy proudu na různých nelineárních rezistorech v Mathcadu.
68 Obr. 38: Kmitočtová spektra proudů nelineárními rezistory v Mathcadu.




69 Obr. 39: Průběhy proudu na různých nelineárních rezistorech v Mathcadu.


70 Obr. 40: Kmitočtová spektra proudů nelineárními rezistory v Mathcadu.
71 děkuji za pozornost otázky?
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Numerické řešení diferenciálních rovnic
 Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
Základy elektrotechniky 2 (21ZEL2) Přednáška 1
 Přednáška 1") Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka
![Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka](/thumbs/91/107653662.jpg "Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka") Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
PŘÍKLAD PŘECHODNÝ DĚJ DRUHÉHO ŘÁDU ŘEŠENÍ V ČASOVÉ OBLASTI A S VYUŽITÍM OPERÁTOROVÉ ANALÝZY
 PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
Numerické metody a programování. Lekce 7
 Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Czech Technical University in Prague Faculty of Electrical Engineering. Fakulta elektrotechnická. České vysoké učení technické v Praze
 Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
teorie elektronických obvodů Jiří Petržela modelování
 Jiří Petržela při tvorbě modelu je třeba uvážit fyzikální podstatu prvků požadovanou přesnost řešení stupeň obtížnosti modelu (jednoduché pro ruční výpočty, složitější pro počítač) účel řešení programové
Jiří Petržela při tvorbě modelu je třeba uvážit fyzikální podstatu prvků požadovanou přesnost řešení stupeň obtížnosti modelu (jednoduché pro ruční výpočty, složitější pro počítač) účel řešení programové
Studium tranzistorového zesilovače
 Studium tranzistorového zesilovače Úkol : 1. Sestavte tranzistorový zesilovač. 2. Sestavte frekvenční amplitudovou charakteristiku. 3. Porovnejte naměřená zesílení s hodnotou vypočtenou. Pomůcky : - Generátor
Studium tranzistorového zesilovače Úkol : 1. Sestavte tranzistorový zesilovač. 2. Sestavte frekvenční amplitudovou charakteristiku. 3. Porovnejte naměřená zesílení s hodnotou vypočtenou. Pomůcky : - Generátor
20ZEKT: přednáška č. 3
 0ZEKT: přednáška č. 3 Stacionární ustálený stav Sériové a paralelní řazení odporů Metoda postupného zjednodušování Dělič napětí Dělič proudu Metoda superpozice Transfigurace trojúhelník/hvězda Metoda uzlových
0ZEKT: přednáška č. 3 Stacionární ustálený stav Sériové a paralelní řazení odporů Metoda postupného zjednodušování Dělič napětí Dělič proudu Metoda superpozice Transfigurace trojúhelník/hvězda Metoda uzlových
Základní vztahy v elektrických
 Základní vztahy v elektrických obvodech Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Klasifikace elektrických obvodů analogové číslicové lineární
Základní vztahy v elektrických obvodech Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Klasifikace elektrických obvodů analogové číslicové lineární
Numerická matematika Písemky
 Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
4. NELINEÁRNÍ NESETRVAČNÉ OBVODY
 4. NELINEÁRNÍ NESETRVAČNÉ OBVODY 4.1. Úvod V předchozích kapitolách jsme ukázali, že k řešení lineárních obvodů lze použít celé řady metod. Při správné aplikaci vedou všechny uvedené metody k jednoznačnému
4. NELINEÁRNÍ NESETRVAČNÉ OBVODY 4.1. Úvod V předchozích kapitolách jsme ukázali, že k řešení lineárních obvodů lze použít celé řady metod. Při správné aplikaci vedou všechny uvedené metody k jednoznačnému
Elektronické obvody analýza a simulace
 Elektronické obvody analýza a simulace Jiří Hospodka katedra Teorie obvodů, 804/B3 ČVUT FEL 4. října 2006 Jiří Hospodka (ČVUT FEL) Elektronické obvody analýza a simulace 4. října 2006 1 / 7 Charakteristika
Elektronické obvody analýza a simulace Jiří Hospodka katedra Teorie obvodů, 804/B3 ČVUT FEL 4. října 2006 Jiří Hospodka (ČVUT FEL) Elektronické obvody analýza a simulace 4. října 2006 1 / 7 Charakteristika
úloh pro ODR jednokrokové metody
 Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Obyčejné diferenciální rovnice (ODE)
") Obyčejné diferenciální rovnice (ODE) Obyčejné diferenciální rovnice N tého řádu převádíme na soustavy N diferenciálních rovnic prvního řádu. V rovnici f x, y, y ', y '',, y N =gx se substituují y '=z 1,
Obyčejné diferenciální rovnice (ODE) Obyčejné diferenciální rovnice N tého řádu převádíme na soustavy N diferenciálních rovnic prvního řádu. V rovnici f x, y, y ', y '',, y N =gx se substituují y '=z 1,
Numerické řešení obyčejných diferenciálních rovnic
 Numerické řešení obyčejných diferenciálních rovnic Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Numerické řešení obyčejných diferenciálních rovnic Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Základy elektrotechniky (ZELE)
") Základy elektrotechniky (ZELE) Studijní program Technologie pro obranu a bezpečnost, 3 leté Bc. studium (civ). Výuka v 1. a 2. semestru, dotace celkem 72h (24+48). V obou semestrech zkouška, zápočet zrušen.
Základy elektrotechniky (ZELE) Studijní program Technologie pro obranu a bezpečnost, 3 leté Bc. studium (civ). Výuka v 1. a 2. semestru, dotace celkem 72h (24+48). V obou semestrech zkouška, zápočet zrušen.
Soustavy se spínanými kapacitory - SC. 1. Základní princip:
 Obvody S - popis 1 Soustavy se spínanými kapacitory - S 1. Základní princip: Simulace rezistoru přepínaným kapacitorem viz známý obrázek! (a rovnice) Modifikace základního spínaného obvodu: Obr. 2.1: Zapojení
Obvody S - popis 1 Soustavy se spínanými kapacitory - S 1. Základní princip: Simulace rezistoru přepínaným kapacitorem viz známý obrázek! (a rovnice) Modifikace základního spínaného obvodu: Obr. 2.1: Zapojení
TEORIE ELEKTRICKÝCH OBVODŮ
 TEORIE ELEKTRICKÝCH OBVODŮ zabývá se analýzou a syntézou vyšetřovaných soustav ZÁKLADNÍ POJMY soustava elektrické zařízení, složená z jednotlivých prvků, vzájemně mezi sebou propojených tak, aby jimi mohl
TEORIE ELEKTRICKÝCH OBVODŮ zabývá se analýzou a syntézou vyšetřovaných soustav ZÁKLADNÍ POJMY soustava elektrické zařízení, složená z jednotlivých prvků, vzájemně mezi sebou propojených tak, aby jimi mohl
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Základní elektronické obvody
 Základní elektronické obvody Soustava jednotek Coulomb (C) = jednotka elektrického náboje q Elektrický proud i = náboj, který proteče průřezem vodiče za jednotku času i [A] = dq [C] / dt [s] Volt (V) =
Základní elektronické obvody Soustava jednotek Coulomb (C) = jednotka elektrického náboje q Elektrický proud i = náboj, který proteče průřezem vodiče za jednotku času i [A] = dq [C] / dt [s] Volt (V) =
Numerické řešení nelineárních rovnic
 Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Obvodové prvky a jejich
 Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
elektrické filtry Jiří Petržela filtry se syntetickými bloky
 Jiří Petržela nevýhoda induktorů, LCR filtry na nízkých kmitočtech kvalita technologická náročnost výroby a rozměry cena nevýhoda syntetických ekvivalentů cívek nárůst aktivních prvků ve filtru kmitočtová
Jiří Petržela nevýhoda induktorů, LCR filtry na nízkých kmitočtech kvalita technologická náročnost výroby a rozměry cena nevýhoda syntetických ekvivalentů cívek nárůst aktivních prvků ve filtru kmitočtová
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Kombinatorická minimalizace
 Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Numerické řešení diferenciálních rovnic
 Numerické řešení diferenciálníc rovnic Mirko Navara ttp://cmp.felk.cvut.cz/ navara/ Centrum strojovéo vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a ttp://mat.feld.cvut.cz/nemecek/nummet.tml
Numerické řešení diferenciálníc rovnic Mirko Navara ttp://cmp.felk.cvut.cz/ navara/ Centrum strojovéo vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a ttp://mat.feld.cvut.cz/nemecek/nummet.tml
Numerická matematika. Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou
 Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Obyčejné diferenciální rovnice počáteční úloha. KMA / NGM F. Ježek
 Občejné diferenciální rovnice počáteční úloha KMA / NGM F. Ježek (JEZEK@KMA.ZCU.CZ) Základní pojm Tp rovnic a podmínek, řád rovnice Počáteční úloha pro občejné diferenciální rovnice Řád metod a počet kroků
Občejné diferenciální rovnice počáteční úloha KMA / NGM F. Ježek (JEZEK@KMA.ZCU.CZ) Základní pojm Tp rovnic a podmínek, řád rovnice Počáteční úloha pro občejné diferenciální rovnice Řád metod a počet kroků
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
teorie elektronických obvodů Jiří Petržela analýza obvodů metodou orientovaných grafů
 Jiří Petržela analýza obvodů metodou orientovaných grafů podstata metod spočívá ve vjádření rovnic popisujících řešený obvod pomocí orientovaných grafů uzl grafu odpovídají závislým a nezávislým veličinám,
Jiří Petržela analýza obvodů metodou orientovaných grafů podstata metod spočívá ve vjádření rovnic popisujících řešený obvod pomocí orientovaných grafů uzl grafu odpovídají závislým a nezávislým veličinám,
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
3. Kmitočtové charakteristiky
 3. Kmitočtové charakteristiky Po základním seznámení s programem ATP a jeho preprocesorem ATPDraw následuje využití jednotlivých prvků v jednoduchých obvodech. Jednotlivé příklady obvodů jsou uzpůsobeny
3. Kmitočtové charakteristiky Po základním seznámení s programem ATP a jeho preprocesorem ATPDraw následuje využití jednotlivých prvků v jednoduchých obvodech. Jednotlivé příklady obvodů jsou uzpůsobeny
Nelineární rovnice. Numerické metody 6. května FJFI ČVUT v Praze
 Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
Řešení "stiff soustav obyčejných diferenciálních rovnic
 Řešení "stiff soustav obyčejných diferenciálních rovnic Jiří Škvára Katedra fyziky, Přírodovědecká fakulta Univerzity J.E. Purkyně v Ústí n.l.. ročník, počítačové metody ve vědě a technice Abstrakt Seminární
Řešení "stiff soustav obyčejných diferenciálních rovnic Jiří Škvára Katedra fyziky, Přírodovědecká fakulta Univerzity J.E. Purkyně v Ústí n.l.. ročník, počítačové metody ve vědě a technice Abstrakt Seminární
U01 = 30 V, U 02 = 15 V R 1 = R 4 = 5 Ω, R 2 = R 3 = 10 Ω
 B 9:00 hod. Elektrotechnika a) Definujte stručně princip superpozice a uveďte, pro které obvody platí. b) Vypočítejte proudy větvemi uvedeného obvodu metodou superpozice. 0 = 30 V, 0 = 5 V R = R 4 = 5
B 9:00 hod. Elektrotechnika a) Definujte stručně princip superpozice a uveďte, pro které obvody platí. b) Vypočítejte proudy větvemi uvedeného obvodu metodou superpozice. 0 = 30 V, 0 = 5 V R = R 4 = 5
Teoretická elektrotechnika - vybrané statě
 Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
U1, U2 vnější napětí dvojbranu I1, I2 vnější proudy dvojbranu
 DVOJBRANY Definice a rozdělení dvojbranů Dvojbran libovolný obvod, který je s jinými částmi obvodu spojen dvěma páry svorek (vstupní a výstupní svorky). K analýze chování obvodu postačí popsat daný dvojbran
DVOJBRANY Definice a rozdělení dvojbranů Dvojbran libovolný obvod, který je s jinými částmi obvodu spojen dvěma páry svorek (vstupní a výstupní svorky). K analýze chování obvodu postačí popsat daný dvojbran
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
teorie elektronických obvodů Jiří Petržela citlivostní a toleranční analýza
 Jiří Petržela citlivostní a toleranční analýza motivace pasivní prvky obvodů jsou prodávány v sortimentních řadách hodnotu konkrétního prvku neznáme, zjistíme měřením s jistotou známe pouze interval, ve
Jiří Petržela citlivostní a toleranční analýza motivace pasivní prvky obvodů jsou prodávány v sortimentních řadách hodnotu konkrétního prvku neznáme, zjistíme měřením s jistotou známe pouze interval, ve
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
2. ZÁKLADNÍ METODY ANALÝZY ELEKTRICKÝCH OBVODŮ
 2 ZÁKLADNÍ METODY ANALÝZY ELEKTRICKÝCH OBVODŮ 2 Úvod Analýzou elektrické soustavy rozumíme výpočet všech napětí a všech proudů v soustavě Při analýze se snažíme soustavu rozdělit na jednotlivé obvodové
2 ZÁKLADNÍ METODY ANALÝZY ELEKTRICKÝCH OBVODŮ 2 Úvod Analýzou elektrické soustavy rozumíme výpočet všech napětí a všech proudů v soustavě Při analýze se snažíme soustavu rozdělit na jednotlivé obvodové
Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologií
 Vysoké učení technické v rně Fakulta elektrotechniky a komunikačních technologií Kolejní 906/4 6 00 rno http://www.utee.feec.vutbr.cz ELEKTOTECHNK (EL) lok nalýza obvodů - speciální metody doc. ng. Jiří
Vysoké učení technické v rně Fakulta elektrotechniky a komunikačních technologií Kolejní 906/4 6 00 rno http://www.utee.feec.vutbr.cz ELEKTOTECHNK (EL) lok nalýza obvodů - speciální metody doc. ng. Jiří
elektrické filtry Jiří Petržela aktivní prvky v elektrických filtrech
 Jiří Petržela základní aktivní prvky používané v analogových filtrech standardní operační zesilovače (VFA) transadmitanční zesilovače (OTA, BOTA, MOTA) transimpedanční zesilovače (CFA) proudové konvejory
Jiří Petržela základní aktivní prvky používané v analogových filtrech standardní operační zesilovače (VFA) transadmitanční zesilovače (OTA, BOTA, MOTA) transimpedanční zesilovače (CFA) proudové konvejory
Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování. vypracovanou úlohu podle níže uvedených zadání. To mimo jiné znamená, že
 Kapitola Zadání Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování alespoň jedné úlohy je nutnou podmínkou pro úspěšné složení zkoušky resp. získaní (klasifikovaného) zápočtu (viz.
Kapitola Zadání Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování alespoň jedné úlohy je nutnou podmínkou pro úspěšné složení zkoušky resp. získaní (klasifikovaného) zápočtu (viz.
MATLAB a numerické metody
 MATLAB a numerické metod MATLAB je velmi vhodný nástroj pro numerické výpočt mnoho problémů je již vřešeno (knihovní funkce nebo Toolbo), jiné si můžeme naprogramovat sami. Budeme se zabývat některými
MATLAB a numerické metod MATLAB je velmi vhodný nástroj pro numerické výpočt mnoho problémů je již vřešeno (knihovní funkce nebo Toolbo), jiné si můžeme naprogramovat sami. Budeme se zabývat některými
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
elektrické filtry Jiří Petržela všepropustné fázovací články, kmitočtové korektory
 Jiří Petržela všepropustné fázovací články, kmitočtové korektory zvláštní typy filtrů všepropustné fázovací články 1. řádu všepropustné fázovací články 2. řádu všepropustné fázovací články vyšších řádů
Jiří Petržela všepropustné fázovací články, kmitočtové korektory zvláštní typy filtrů všepropustné fázovací články 1. řádu všepropustné fázovací články 2. řádu všepropustné fázovací články vyšších řádů
Integrace. Numerické metody 7. května FJFI ČVUT v Praze
 Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
teorie elektronických obvodů Jiří Petržela analýza obvodů s neregulárními prvky
 Jiří Petržela za neregulární z hlediska metody uzlových napětí je považován prvek, který nelze popsat admitanční maticí degenerovaný dvojbran, jedná se především o různé typy imitančních konvertorů obecný
Jiří Petržela za neregulární z hlediska metody uzlových napětí je považován prvek, který nelze popsat admitanční maticí degenerovaný dvojbran, jedná se především o různé typy imitančních konvertorů obecný
teorie elektronických obvodů Jiří Petržela syntéza elektronických obvodů
 Jiří Petržela příklad nalezněte dvě různé realizace admitanční funkce zadané formou racionální lomené funkce Y () () ( ) ( ) : první krok rozkladu do řetězového zlomku () 9 7 9 výledný rozklad ( ) 9 9
Jiří Petržela příklad nalezněte dvě různé realizace admitanční funkce zadané formou racionální lomené funkce Y () () ( ) ( ) : první krok rozkladu do řetězového zlomku () 9 7 9 výledný rozklad ( ) 9 9
Přechodné děje 1. řádu v časové oblasti
 Přechodné děje 1. řádu v časové oblasti EO2 Přednáška 6 Pavel Máša Pokud v obvodu dojde ke změně Připojení zdroje Odpojení zdroje Připojení nebo odpojení obvodového prvku (R, L, C, ) Změně velikosti některého
Přechodné děje 1. řádu v časové oblasti EO2 Přednáška 6 Pavel Máša Pokud v obvodu dojde ke změně Připojení zdroje Odpojení zdroje Připojení nebo odpojení obvodového prvku (R, L, C, ) Změně velikosti některého
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka
 Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
II. Nakreslete zapojení a popište funkci a význam součástí následujícího obvodu: Integrátor s OZ
 Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
ODR metody Runge-Kutta
 ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
Moderní numerické metody
 Moderní numerické metody Sbírka příkladů doc. RNDr. Jaromír Baštinec, CSc. RNDr. Michal Novák, Ph.D. ÚSTAV MATEMATIKY Moderní numerické metody 1 Obsah 1 Soustavy lineárních rovnic 7 2 Řešení jedné nelineární
Moderní numerické metody Sbírka příkladů doc. RNDr. Jaromír Baštinec, CSc. RNDr. Michal Novák, Ph.D. ÚSTAV MATEMATIKY Moderní numerické metody 1 Obsah 1 Soustavy lineárních rovnic 7 2 Řešení jedné nelineární
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech.
 viz např. vstupní test ve skriptech.") Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb
 Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano
 = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano") Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Zesilovače. Ing. M. Bešta
 ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
Bipolární tranzistory
 Bipolární tranzistory h-parametry, základní zapojení, vysokofrekvenční vlastnosti, šumy, tranzistorový zesilovač, tranzistorový spínač Bipolární tranzistory (bipolar transistor) tranzistor trojpól, zapojení
Bipolární tranzistory h-parametry, základní zapojení, vysokofrekvenční vlastnosti, šumy, tranzistorový zesilovač, tranzistorový spínač Bipolární tranzistory (bipolar transistor) tranzistor trojpól, zapojení
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Maturitní témata z matematiky
 Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
elektrické filtry Jiří Petržela aktivní filtry
 Jiří Petržela postup při návrhu filtru nové struktury analýza daného obvodu programem Snap získání symbolického tvaru přenosové funkce srovnání koeficientů přenosové funkce s přenosem obecného bikvadu
Jiří Petržela postup při návrhu filtru nové struktury analýza daného obvodu programem Snap získání symbolického tvaru přenosové funkce srovnání koeficientů přenosové funkce s přenosem obecného bikvadu
Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1
 okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1") ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem
 upravit následujícím způsobem") Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Mějme obvod podle obrázku. Jaké napětí bude v bodech 1, 2, 3 (proti zemní svorce)? Jaké mezi uzly 1 a 2? Jaké mezi uzly 2 a 3?
? Jaké mezi uzly 1 a 2? Jaké mezi uzly 2 a 3?") TÉMA 1 a 2 V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky V jakých jednotkách se vyjadřuje napětí uveďte název a značku jednotky V jakých jednotkách se vyjadřuje odpor uveďte název
TÉMA 1 a 2 V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky V jakých jednotkách se vyjadřuje napětí uveďte název a značku jednotky V jakých jednotkách se vyjadřuje odpor uveďte název
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Připnutí LC větví FKZ k přípojnici 27 kv trakční napájecí stanice
 Vědeckotechnický sborník ČD č. /006 Doc. Ing. Karel Hlava, Sc. Ing. adovan Doleček, Ph.D. Připnutí větví FKZ k přípojnici 7 kv trakční napájecí stanice Klíčová slova: trakční proudová soustava 5 kv, 50
Vědeckotechnický sborník ČD č. /006 Doc. Ing. Karel Hlava, Sc. Ing. adovan Doleček, Ph.D. Připnutí větví FKZ k přípojnici 7 kv trakční napájecí stanice Klíčová slova: trakční proudová soustava 5 kv, 50
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 21 Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 2 / 21 Řešíme následující úlohu: differencovatelnou funkci f : R R známe jen v konečném počtu bodů x 0,
1 / 21 Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 2 / 21 Řešíme následující úlohu: differencovatelnou funkci f : R R známe jen v konečném počtu bodů x 0,
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
Čebyševovy aproximace
 Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
2. Pomocí Theveninova teorému zjednodušte zapojení na obrázku, vypočtěte hodnoty jeho prvků. U 1 =10 V, R 1 =1 kω, R 2 =2,2 kω.
 A5M34ELE - testy 1. Vypočtěte velikost odporu rezistoru R 1 z obrázku. U 1 =15 V, U 2 =8 V, U 3 =10 V, R 2 =200Ω a R 3 =1kΩ. 2. Pomocí Theveninova teorému zjednodušte zapojení na obrázku, vypočtěte hodnoty
A5M34ELE - testy 1. Vypočtěte velikost odporu rezistoru R 1 z obrázku. U 1 =15 V, U 2 =8 V, U 3 =10 V, R 2 =200Ω a R 3 =1kΩ. 2. Pomocí Theveninova teorému zjednodušte zapojení na obrázku, vypočtěte hodnoty
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Grafické zobrazení frekvenčních závislostí
 Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
řešeny numericky 6 Obyčejné diferenciální rovnice řešeny numericky
 řešeny numericky řešeny numericky Břetislav Fajmon, UMAT FEKT, VUT Brno Na minulé přednášce jsme viděli některé klasické metody a přístupy pro řešení diferenciálních rovnic: stručně řečeno, rovnice obsahující
řešeny numericky řešeny numericky Břetislav Fajmon, UMAT FEKT, VUT Brno Na minulé přednášce jsme viděli některé klasické metody a přístupy pro řešení diferenciálních rovnic: stručně řečeno, rovnice obsahující
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
ekologie Pavel Fibich rovnice rovnice Pavel Fibich Shrnutí Literatura
 a diferenční - nalévárna pavel.fibich@prf.jcu.cz 27. září 2012 Obsah 1 2 3 4 5 6 7 Proč povídat o diferenciálních (δr) a diferenčních rovnicích ( R) v kurzu? δr a R jsou vhodné pro popisy vztahů a vývoje
a diferenční - nalévárna pavel.fibich@prf.jcu.cz 27. září 2012 Obsah 1 2 3 4 5 6 7 Proč povídat o diferenciálních (δr) a diferenčních rovnicích ( R) v kurzu? δr a R jsou vhodné pro popisy vztahů a vývoje
Iterační metody řešení soustav lineárních rovnic. 27. prosince 2011
 Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Řešení nelineárních rovnic
 Řešení nelineárních rovnic Metody sečen (sekantová a regula falsi) Máme dva body x 1 a x mezi nimiž se nachází kořen Nový bod x 3 volíme v průsečíku spojnice bodů x 1, f x 1 a x, f x (sečny) s osou x ERRBISPAS
Řešení nelineárních rovnic Metody sečen (sekantová a regula falsi) Máme dva body x 1 a x mezi nimiž se nachází kořen Nový bod x 3 volíme v průsečíku spojnice bodů x 1, f x 1 a x, f x (sečny) s osou x ERRBISPAS
Numerické řešení nelineárních rovnic
 Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
ZÁKLADY ELEKTROTECHNIKY pro OPT
 ZÁKLADY ELEKTROTECHNIKY pro OPT Přednáška Rozsah předmětu: 24+24 z, zk 1 Literatura: [1] Uhlíř a kol.: Elektrické obvody a elektronika, FS ČVUT, 2007 [2] Pokorný a kol.: Elektrotechnika I., TF ČZU, 2003
ZÁKLADY ELEKTROTECHNIKY pro OPT Přednáška Rozsah předmětu: 24+24 z, zk 1 Literatura: [1] Uhlíř a kol.: Elektrické obvody a elektronika, FS ČVUT, 2007 [2] Pokorný a kol.: Elektrotechnika I., TF ČZU, 2003
 Interpolace Uvažujme třídu funkcí jedné proměnné ψ(x; a 0,..., a n ), kde a 0,..., a n jsou parametry, které popisují jednotlivé funkce této třídy. Mějme dány body x 0, x 1,..., x n, x i x k, i, k = 0,
Interpolace Uvažujme třídu funkcí jedné proměnné ψ(x; a 0,..., a n ), kde a 0,..., a n jsou parametry, které popisují jednotlivé funkce této třídy. Mějme dány body x 0, x 1,..., x n, x i x k, i, k = 0,
Lineární stabilita a teorie II. řádu
 Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Fyzika I. Obvody. Petr Sadovský. ÚFYZ FEKT VUT v Brně. Fyzika I. p. 1/36
 Fyzika I. p. 1/36 Fyzika I. Obvody Petr Sadovský petrsad@feec.vutbr.cz ÚFYZ FEKT VUT v Brně Zdroj napětí Fyzika I. p. 2/36 Zdroj proudu Fyzika I. p. 3/36 Fyzika I. p. 4/36 Zdrojová a spotřebičová orientace
Fyzika I. p. 1/36 Fyzika I. Obvody Petr Sadovský petrsad@feec.vutbr.cz ÚFYZ FEKT VUT v Brně Zdroj napětí Fyzika I. p. 2/36 Zdroj proudu Fyzika I. p. 3/36 Fyzika I. p. 4/36 Zdrojová a spotřebičová orientace
Předmět A3B31TES/Př. 13
 Předmět A3B31TES/Př. 13 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 13: Kvantování, modulace, stavový popis PS Předmět A3B31TES/Př. 13 květen 2015 1 / 28 Obsah 1 Kvantování 2 Modulace
Předmět A3B31TES/Př. 13 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 13: Kvantování, modulace, stavový popis PS Předmět A3B31TES/Př. 13 květen 2015 1 / 28 Obsah 1 Kvantování 2 Modulace
POZNÁMKY K ZADÁNÍ PREZENTACÍ - 17BBEO - TÉMA 2
 POZNÁMKY K ZADÁNÍ PREZENTACÍ - 17BBEO - TÉMA 2 (zimní semestr 2012/2013, kompletní verze, 21. 11. 2012) Téma 2 / Úloha 1: (jednocestný usměrňovač s filtračním kondenzátorem) Simulace (např. v MicroCapu)
POZNÁMKY K ZADÁNÍ PREZENTACÍ - 17BBEO - TÉMA 2 (zimní semestr 2012/2013, kompletní verze, 21. 11. 2012) Téma 2 / Úloha 1: (jednocestný usměrňovač s filtračním kondenzátorem) Simulace (např. v MicroCapu)
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Modelování a simulace elektronických systémů
 Modelování a simulace elektronických systémů Elektronické systémy Řídicí obvody, obvody pro úpravu signálu, polovodičové měniče, elektromotory Modelování a simulace Obvodových veličin OrCAD/PSPICE Chování
Modelování a simulace elektronických systémů Elektronické systémy Řídicí obvody, obvody pro úpravu signálu, polovodičové měniče, elektromotory Modelování a simulace Obvodových veličin OrCAD/PSPICE Chování