SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
|
|
|
- Jozef Neduchal
- před 5 lety
- Počet zobrazení:
Transkript
1 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek
2 Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální Pravoúhlé souřadnice [x, y, z] Eliptické (zeměpisné) souřadnice [λ, φ, H] S-JTSK, S-42 lokální Prostorové / rovinné Typické případy lokalizace V prostoru (6DOF) [x, y, z, pitch, roll, yaw] V rovině (3DOF) [x, y, φ]
3 Popis orientace v prostoru
4 Využití lokalizace Vizualizace polohy mobilního robotu Informace o aktuální pozici a orientaci mobilního robotu pro operátora Autonomní chování mobilního robotu Navigace mobilního robotu Lokalizace měřených dat mobilním robotem Tvorba map prostředí a vizualizace polí (teplota / ionizující záření / atd.)
5 Využití vizualizace polohy



6 Využití autonomní chování?

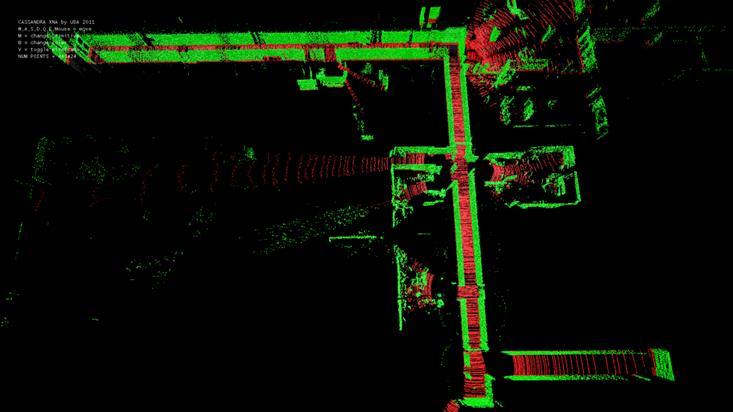


7 Využití tvorba map
8 Získání lokalizačních údajů Možnosti přímého měření pozice a orientace mobilního robotu jsou omezené Ve většině případů je nutné použít nepřímou metodu výpočtu lokalizačních údajů Snímače vhodné pro účel lokalizace jsou nepřesné a málo robustní Nutnost kombinovat více různých přístupů získání lokalizačních údajů pro zvýšení přesnosti a robustnosti (datová fúze)
9 Základní dělení lokalizace (1) Podle stupňů volnosti 3DOF, 6DOF, Podle prostředí vnější (mimo budovy)/vnitřní (v budově) Podle znalosti vztažného bodu absolutní (např. GNSS)/relativní (např. odometrie) Podle plošné působnosti lokální/globální (např. GNSS) Podle znalosti mapy lokalizace v mapě/bez mapy
10 Základní dělení lokalizace (2) Podle okamžiku vyhodnocení online/offline Podle nutnosti úpravy prostředí vyžadující/nevyžadující úpravu prostředí Podle dynamiky prostředí statické/dynamické (detekce, filtrace změny) Podle způsobu realizace pasivní/aktivní (řízení za účelem zlepšení lokalizace)
11 Základní dělení lokalizace (3) Podle počtu robotů jeden/více Podle místa vyhodnocení interně (v robotu)/externě (mimo robot) Podle typu algoritmu jednokrokový/iterační
12 Přehled zdrojů dat
13 Dostupné primární veličiny (1) Enkodéry poloha kol (φ 1, φ 2 ) (x, y, α) d dt (v x, v y, ω α ) d dt (a x, a y, ε α ) Tachodynamo rychlost kol (x, y, α) dt (v x, v y, ω α ) (ω 1, ω 2 ) (v x, v y, ω α ) d (a dt x, a y, ε α ) Magnetometr vektor intenzity magn. pole (H x, H y, H z ) ( H, α, β) d dt (ω α, ω β ) d dt (ε α, ε β ) Gyroskop úhlová rychlost (α, β, γ) dt (ω α, ω β, ω γ ) d dt (ε α, ε β, ε γ )
14 Dostupné primární veličiny (2) Akcelerometr vektor celkového zrychlení (x, y, z) dt (v x, v y, v z ) dt (a x, a y, a z ) (a x, a y, a z ) ( A, α, β) GNSS polohový vektor (x, y, z) d dt (v x, v y, v z ) d dt (a x, a y, a z ) Diferenciální GNSS 2x polohový vektor (x 1, y 1, z 1 ), (x 2, y 2, z 2 ) ( A, α, β) d (ω dt α, ω β ) d (ε dt α, ε β ) Laserový skener mračno bodů ( M i,1, λ i,1, φ i,1 ), ( M i,2, λ i,2, φ i,2 ) (x, y, z, α, β, γ)
15 Vyjádření a definice chyb
16 Problém specifikace přesnosti Specifikace chyb měřicích systémů pro určení pozice a orientace je často nekompletní nebo zavádějící Chyba je často specifikována příliš obecně nebo naopak jen v jednom pracovním bodě Systematická chyba (offset, bias) pro požadovaný interval měření není specifikována Často specifikovány pouze šumové vlastnosti Některé systémy mají specifikovánu chybu pouze pro dlouhodobá statická měření
17 Pravdivost, preciznost, přesnost Pravdivost (trueness) Těsnost shody mezi střední hodnotou z nekonečného počtu opakovaných měření měřené veličiny a referenční hodnotou měřené veličiny Preciznost (precision) Těsnost shody hodnot měřené veličiny získaných opakovaným měřením na stejném objektu za specifikovaných podmínek Přesnost (accuracy) Těsnost shody mezi naměřenou hodnotou měřené veličiny a referenční hodnotou měřené veličiny

18 Zlepšení pravdivosti Pravdivost, preciznost, přesnost Zlepšení preciznosti
19 Chyby měření Typ měření Stacionární jev měření v nepohybujícím se bodě Dynamický jev měření v pohybujícím se bodu Srovnávací hodnota Střední hodnota Referenční hodnota Vyjádření Limitní chyba Pravděpodobnostní
20 1D chyba (chyba souřadnice) Odchylka naměřené hodnoty od referenční x i = x i x ref Výběrový průměr x = 1 n n i=1 x i Výběrová směrodatná odchylka σ x = 1 n n i=1 x i x 2 Výběrový kvadratický průměr RMS = 1 n n x i 2 i=1 = x 2 + σ x 2
21 1D chyba (chyba souřadnice) Charakteristika Pravděpodobnost LEP 50 % RMS 68 % (gauss) 2RMS 95 % (gauss)
22 1D chyba (chyba souřadnice)
23 2D chyba (chyba v rovině) Charakteristika Pravděpodobnost DRMS > 63 % (χ 2 ) 2DRMS > 98 % (χ 2 ) Elipsa chyb (1σ) 39 % (χ 2 ) Elipsa chyb (2σ) 86 % (χ 2 ) CEP 50 % R95 95 % DRMS = RMS 2 2 x + RMS y 2DRMS = 2 DRMS CEP = median x i x 2 + y i y 2

24 2D chyba (chyba v rovině)

25 2D chyba (chyba v rovině)
26 2D chyba (chyba v rovině)


27 Příklad reálných chyb GNSS 0,5 hod 48 hod
28 3D chyba (chyba v prostoru) Ukazatel Pravděpodobnost MRSE > 61 % SEP 50 % Elipsoid chyb (1σ) 20 % Elipsoid chyb (2σ) 74 % MRSE = RMS x 2 + RMS y 2 + RMS z 2 SEP = median x i x 2 + y i y 2 + z i z 2
29 Přesnost preciznost
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY
 Centrum pro rozvoj výzkumu pokročilých řídicích a senzorických technologií MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY Ing. Tomáš Jílek, Ph.D. (VUT v Brně) Obsah semináře úvod metody měření a jejich
Centrum pro rozvoj výzkumu pokročilých řídicích a senzorických technologií MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY Ing. Tomáš Jílek, Ph.D. (VUT v Brně) Obsah semináře úvod metody měření a jejich
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
ZPRACOVÁNÍ LOKALIZAČNÍCH DAT A JEJICH PŘESNOSTI PROCESSING OF LOCALIZATION DATA AND ITS ACCURACY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Základní terminologické pojmy (Mezinárodní metrologický slovník VIM3)
") Základní terminologické pojmy (Mezinárodní metrologický slovník VIM3) Přesnost a správnost v metrologii V běžné řeči zaměnitelné pojmy. V metrologii a chemii ne! Anglický termín Measurement trueness Measurement
Základní terminologické pojmy (Mezinárodní metrologický slovník VIM3) Přesnost a správnost v metrologii V běžné řeči zaměnitelné pojmy. V metrologii a chemii ne! Anglický termín Measurement trueness Measurement
Nová metrologická terminologie. Marta Farková
 Nová metrologická terminologie Marta Farková 14. 11. 2013 DŘÍVE POUŽÍVANÉ POJMY Anglicky: Accuracy Precision Reliability Česky: Správnost Přesnost Spolehlivost 2 SOUČASNÝ STAV Anglicky: Trueness Precision
Nová metrologická terminologie Marta Farková 14. 11. 2013 DŘÍVE POUŽÍVANÉ POJMY Anglicky: Accuracy Precision Reliability Česky: Správnost Přesnost Spolehlivost 2 SOUČASNÝ STAV Anglicky: Trueness Precision
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
ZABEZPEČENÍ KVALITY V LABORATOŘI
 ZABEZPEČENÍ KVALITY V LABORATOŘI David MILDE, 2014-2017 QUALITY KVALITA (JAKOST) Kvalita = soubor znaků a charakteristik výrobku či služby, který může uspokojit určitou potřebu. Kvalita v laboratoři=výsledky,které:
ZABEZPEČENÍ KVALITY V LABORATOŘI David MILDE, 2014-2017 QUALITY KVALITA (JAKOST) Kvalita = soubor znaků a charakteristik výrobku či služby, který může uspokojit určitou potřebu. Kvalita v laboratoři=výsledky,které:
Stavba slovníku VIM 3: Zásady terminologické práce
 VIM 1 VIM 2:1993 ČSN 01 0115 Mezinárodní slovník základních a všeobecných termínů v metrologii VIM 3:2007 International Vocabulary of Metrology Basic and General Concepts and Associated Terms Mezinárodní
VIM 1 VIM 2:1993 ČSN 01 0115 Mezinárodní slovník základních a všeobecných termínů v metrologii VIM 3:2007 International Vocabulary of Metrology Basic and General Concepts and Associated Terms Mezinárodní
ZPRACOVÁNÍ LOKALIZAČNÍCH DAT A JEJICH PŘESNOSTI PROCESSING OF LOCALIZATION DATA AND ITS ACCURACY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM
 WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování
 Název diagnostiky: Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování Datum provedení: září 2012 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření
Název diagnostiky: Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování Datum provedení: září 2012 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření
Transformace dat mezi různými datovými zdroji
 Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP
 SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
MATEMATICKO STATISTICKÉ PARAMETRY ANALYTICKÝCH VÝSLEDKŮ
 MATEMATICKO STATISTICKÉ PARAMETRY ANALYTICKÝCH VÝSLEDKŮ Má-li analytický výsledek objektivně vypovídat o chemickém složení vzorku, musí splňovat určitá kriteria: Mezinárodní metrologický slovník (VIM 3),
MATEMATICKO STATISTICKÉ PARAMETRY ANALYTICKÝCH VÝSLEDKŮ Má-li analytický výsledek objektivně vypovídat o chemickém složení vzorku, musí splňovat určitá kriteria: Mezinárodní metrologický slovník (VIM 3),
Úvod do problematiky měření
 1/18 Lord Kelvin: "Když to, o čem mluvíte, můžete změřit, a vyjádřit to pomocí čísel, něco o tom víte. Ale když to nemůžete vyjádřit číselně, je vaše znalost hubená a nedostatečná. Může to být začátek
1/18 Lord Kelvin: "Když to, o čem mluvíte, můžete změřit, a vyjádřit to pomocí čísel, něco o tom víte. Ale když to nemůžete vyjádřit číselně, je vaše znalost hubená a nedostatečná. Může to být začátek
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
Resolution, Accuracy, Precision, Trueness
 Věra Fišerová 26.11.2013 Resolution, Accuracy, Precision, Trueness Při skenování se používá mnoho pojmů.. Shodnost měření, rozlišení, pravdivost měření, přesnost, opakovatelnost, nejistota měření, chyba
Věra Fišerová 26.11.2013 Resolution, Accuracy, Precision, Trueness Při skenování se používá mnoho pojmů.. Shodnost měření, rozlišení, pravdivost měření, přesnost, opakovatelnost, nejistota měření, chyba
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
POSOUZENÍ PŘESNOSTI METODY MOBILNÍHO LASEROVÉHO SKENOVÁNÍ A PŘÍKLADY JEJÍHO POUŽITÍ V PRAXI
 POSOUZENÍ PŘESNOSTI METODY MOBILNÍHO LASEROVÉHO SKENOVÁNÍ A PŘÍKLADY JEJÍHO POUŽITÍ V PRAXI Bohumil Kouřím, GEOVAP, spol. s r.o Jiří Lechner, VÚGTK,v.v.i. Technické údaje posuzovaného zařízení - snímací
POSOUZENÍ PŘESNOSTI METODY MOBILNÍHO LASEROVÉHO SKENOVÁNÍ A PŘÍKLADY JEJÍHO POUŽITÍ V PRAXI Bohumil Kouřím, GEOVAP, spol. s r.o Jiří Lechner, VÚGTK,v.v.i. Technické údaje posuzovaného zařízení - snímací
 !!! #!! # % & ()!+ %& #( ) +,,!,!!./0./01 2 34 % 00 (1!#! #! #23 + )!!,,5,!+ 4)!005!! 6 )! %,76!,8, )! 44 %!! #! #236!!1 1 5 6 5+!!1 ( 9 9!5 6 + /+ # % 7 8 % : 4; 2,/! = %
!!! #!! # % & ()!+ %& #( ) +,,!,!!./0./01 2 34 % 00 (1!#! #! #23 + )!!,,5,!+ 4)!005!! 6 )! %,76!,8, )! 44 %!! #! #236!!1 1 5 6 5+!!1 ( 9 9!5 6 + /+ # % 7 8 % : 4; 2,/! = %
Definice spojité náhodné veličiny zjednodušená verze
 Definice spojité náhodné veličiny zjednodušená verze Náhodná veličina X se nazývá spojitá, jestliže existuje nezáporná funkce f : R R taková, že pro každé a, b R { }, a < b, platí P(a < X < b) = b a f
Definice spojité náhodné veličiny zjednodušená verze Náhodná veličina X se nazývá spojitá, jestliže existuje nezáporná funkce f : R R taková, že pro každé a, b R { }, a < b, platí P(a < X < b) = b a f
Pro mapování na našem území bylo použito následujících souřadnicových systémů:
 SOUŘADNICOVÉ SYSTÉMY Pro mapování na našem území bylo použito následujících souřadnicových systémů: 1. SOUŘADNICOVÉ SYSTÉMY STABILNÍHO KATASTRU V první polovině 19. století bylo na našem území mapováno
SOUŘADNICOVÉ SYSTÉMY Pro mapování na našem území bylo použito následujících souřadnicových systémů: 1. SOUŘADNICOVÉ SYSTÉMY STABILNÍHO KATASTRU V první polovině 19. století bylo na našem území mapováno
VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ
 VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ Ing. B. Koska, Ph.D., Ing. J. Jon Katedra speciální geodézie Fakulta stavební České vysoké učení technické v Praze Telč Listopad 2014 Obsah Seznámení s projektem
VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ Ing. B. Koska, Ph.D., Ing. J. Jon Katedra speciální geodézie Fakulta stavební České vysoké učení technické v Praze Telč Listopad 2014 Obsah Seznámení s projektem
VK CZ.1.07/2.2.00/
 Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Mezinárodn metrologických pojmů a chemická
 Mezinárodn rodní slovník metrologických pojmů a chemická a bioanalytická měření Zbyněk k Plzák Ústav anorganické chemie AV ČR, v. v. i Zlatá pravidla vědeckv deckého života... Terminologií se většinou
Mezinárodn rodní slovník metrologických pojmů a chemická a bioanalytická měření Zbyněk k Plzák Ústav anorganické chemie AV ČR, v. v. i Zlatá pravidla vědeckv deckého života... Terminologií se většinou
Učební plán 4. letého studia předmětu matematiky. Učební plán 6. letého studia předmětu matematiky
 Učební plán 4. letého studia předmětu matematiky Ročník I II III IV Dotace 3 3+1 2+1 2+2 Povinnost povinný povinný povinný povinný Učební plán 6. letého studia předmětu matematiky Ročník 1 2 3 4 5 6 Dotace
Učební plán 4. letého studia předmětu matematiky Ročník I II III IV Dotace 3 3+1 2+1 2+2 Povinnost povinný povinný povinný povinný Učební plán 6. letého studia předmětu matematiky Ročník 1 2 3 4 5 6 Dotace
Protokol určení bodů podrobného polohového bodového pole technologií GNSS
 Protokol určení bodů podrobného polohového bodového pole technologií GNSS Lokalita (název): Hosek246 Okres: Rakovník Katastrální území: Velká Buková ZPMZ: Organizace-firma zhotovitele:air Atlas spol. s
Protokol určení bodů podrobného polohového bodového pole technologií GNSS Lokalita (název): Hosek246 Okres: Rakovník Katastrální území: Velká Buková ZPMZ: Organizace-firma zhotovitele:air Atlas spol. s
PROJEKT TVORBY NOVÉHO VÝŠKOPISU ČESKÉ REPUBLIKY
 ČESKÝ ÚŘAD ZEMĚMĚŘICKÝ A KATASTRÁLNÍ ZEMĚMĚŘICKÝ ÚŘAD PROJEKT TVORBY NOVÉHO VÝŠKOPISU ČESKÉ REPUBLIKY Mgr. Petr Dušánek ZÚ - zeměměřický odbor Pardubice 1 OBSAH PREZENTACE Litemapper 6800 Stručný popis
ČESKÝ ÚŘAD ZEMĚMĚŘICKÝ A KATASTRÁLNÍ ZEMĚMĚŘICKÝ ÚŘAD PROJEKT TVORBY NOVÉHO VÝŠKOPISU ČESKÉ REPUBLIKY Mgr. Petr Dušánek ZÚ - zeměměřický odbor Pardubice 1 OBSAH PREZENTACE Litemapper 6800 Stručný popis
Úvod do mobilní robotiky AIL028
 Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Výběrové charakteristiky a jejich rozdělení
 Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Statistické šetření úplné (vyčerpávající) neúplné (výběrové) U výběrového šetření se snažíme o to, aby výběrový
Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Statistické šetření úplné (vyčerpávající) neúplné (výběrové) U výběrového šetření se snažíme o to, aby výběrový
Analýza pohybu. Karel Horák. Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok.
 1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
2. ANALYTICKÁ GEOMETRIE V PROSTORU Vektory Úlohy k samostatnému řešení... 21
 2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
Souřadnicové systémy a stanovení magnetického severu. Luděk Krtička, Jan Langr
 Souřadnicové systémy a stanovení magnetického severu Luděk Krtička, Jan Langr Workshop Příprava mapových podkladů Penzion Školka, Velké Karlovice 9.-11. 2. 2018 Upozornění Tato prezentace opomíjí některé
Souřadnicové systémy a stanovení magnetického severu Luděk Krtička, Jan Langr Workshop Příprava mapových podkladů Penzion Školka, Velké Karlovice 9.-11. 2. 2018 Upozornění Tato prezentace opomíjí některé
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014. 1. Obor reálných čísel
 Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Vliv vířivého proudění na přesnost měření průtoku v komínech
 Vliv vířivého proudění na přesnost měření průtoku v komínech J. Geršl, S. Knotek Z. Belligoli, R. Dwight M. Coleman, R. Robinson Hradec Králové, 21.9. 2017 O čem bude přednáška Referenční metoda měření
Vliv vířivého proudění na přesnost měření průtoku v komínech J. Geršl, S. Knotek Z. Belligoli, R. Dwight M. Coleman, R. Robinson Hradec Králové, 21.9. 2017 O čem bude přednáška Referenční metoda měření
Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace
 Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace Zeměměřický úřad, Jan Řezníček Praha, 2018 Definice matematická pravidla (rovnice) jednoznačné přidružení souřadnic k prostorovým informacím
Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace Zeměměřický úřad, Jan Řezníček Praha, 2018 Definice matematická pravidla (rovnice) jednoznačné přidružení souřadnic k prostorovým informacím
Elektromagnetické pole je generováno elektrickými náboji a jejich pohybem. Je-li zdroj charakterizován nábojovou hustotou ( r r
 Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Stochastické signály (opáčko)
") Stochastické signály (opáčko) Stochastický signál nemůžeme popsat rovnicí, ale pomocí sady parametrů. Hodit se bude statistika a pravděpodobnost (umíte). Tohle je jen miniminiminiopáčko, později probereme
Stochastické signály (opáčko) Stochastický signál nemůžeme popsat rovnicí, ale pomocí sady parametrů. Hodit se bude statistika a pravděpodobnost (umíte). Tohle je jen miniminiminiopáčko, později probereme
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY
 GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
Chyby měření 210DPSM
 Chyby měření 210DPSM Jan Zatloukal Stručný přehled Zdroje a druhy chyb Systematické chyby měření Náhodné chyby měření Spojité a diskrétní náhodné veličiny Normální rozdělení a jeho vlastnosti Odhad parametrů
Chyby měření 210DPSM Jan Zatloukal Stručný přehled Zdroje a druhy chyb Systematické chyby měření Náhodné chyby měření Spojité a diskrétní náhodné veličiny Normální rozdělení a jeho vlastnosti Odhad parametrů
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
terminologie předchozí kapitoly: (ϕ, Ω) - plocha, S - geometrický obraz plochy
 - plocha, S - geometrický obraz plochy") 2. Plošný integrál. Poznámka. Obecně: integrování přes k-rozměrné útvary (k-plochy) v R n. Omezíme se na případ k = 2, n = 3. Definice. Množina S R 3 se nazve plocha, pokud S = ϕ(), kde R 2 je otevřená
2. Plošný integrál. Poznámka. Obecně: integrování přes k-rozměrné útvary (k-plochy) v R n. Omezíme se na případ k = 2, n = 3. Definice. Množina S R 3 se nazve plocha, pokud S = ϕ(), kde R 2 je otevřená
Cíle lokalizace. Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí
 2. vzhledem k mapě 3. v daném prostředí") Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Úvod do předmětu geodézie
 1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
Odchylka ekliptiky od roviny Galaxie
 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Odhad parametrů N(µ, σ 2 )
") Odhad parametrů N(µ, σ 2 ) Mějme statistický soubor x 1, x 2,, x n modelovaný jako realizaci náhodného výběru z normálního rozdělení N(µ, σ 2 ) s neznámými parametry µ a σ. Jaký je maximální věrohodný
Odhad parametrů N(µ, σ 2 ) Mějme statistický soubor x 1, x 2,, x n modelovaný jako realizaci náhodného výběru z normálního rozdělení N(µ, σ 2 ) s neznámými parametry µ a σ. Jaký je maximální věrohodný
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH. Jiří Tůma
 ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
KGG/STG Statistika pro geografy
 KGG/STG Statistika pro geografy 5. Odhady parametrů základního souboru Mgr. David Fiedor 16. března 2015 Vztahy mezi výběrovým a základním souborem Osnova 1 Úvod, pojmy Vztahy mezi výběrovým a základním
KGG/STG Statistika pro geografy 5. Odhady parametrů základního souboru Mgr. David Fiedor 16. března 2015 Vztahy mezi výběrovým a základním souborem Osnova 1 Úvod, pojmy Vztahy mezi výběrovým a základním
TERMINOLOGIE ... NAMĚŘENÁ DATA. Radek Mareček PŘEDZPRACOVÁNÍ DAT. funkční skeny
 PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
1. Vymezení předmětu veřejné zakázky a podmínek plnění
 1. Vymezení předmětu veřejné zakázky a podmínek plnění a) Vytvoření vektorové sítě místních komunikací silnic, parkovišť, parkovacích stání, chodníků a stezek. b) Kategorizace místních komunikací podle
1. Vymezení předmětu veřejné zakázky a podmínek plnění a) Vytvoření vektorové sítě místních komunikací silnic, parkovišť, parkovacích stání, chodníků a stezek. b) Kategorizace místních komunikací podle
Laserové skenování - zjištění odtokových poměrů v blízkém okolí železniční trati
 Název diagnostiky: Laserové skenování - zjištění odtokových poměrů v blízkém okolí železniční trati Datum provedení: Červenec 2013 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření mobilním mapovacím
Název diagnostiky: Laserové skenování - zjištění odtokových poměrů v blízkém okolí železniční trati Datum provedení: Červenec 2013 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření mobilním mapovacím
BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK
 GNSS SEMINÁŘ 2018 BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK 21. ročník semináře Družicové metody v geodézii a katastru Brno, GNSS SEMINÁŘ 2018 Úvod Problematika:
GNSS SEMINÁŘ 2018 BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK 21. ročník semináře Družicové metody v geodézii a katastru Brno, GNSS SEMINÁŘ 2018 Úvod Problematika:
Posouzení přesnosti měření
 Přesnost měření Posouzení přesnosti měření Hodnotu kvantitativně popsaného parametru jakéhokoliv objektu zjistíme jedině měřením. Reálné měření má vždy omezenou přesnost V minulosti sloužila k posouzení
Přesnost měření Posouzení přesnosti měření Hodnotu kvantitativně popsaného parametru jakéhokoliv objektu zjistíme jedině měřením. Reálné měření má vždy omezenou přesnost V minulosti sloužila k posouzení
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ. JS pro 3. ročník S3G
 SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 3. ročník S3G ROZPIS TÉMAT PRO ŠK. ROK 2018/2019 1) Kartografické zobrazení na území ČR Cassiny-Soldnerovo zobrazení Obecné konformní kuželové zobrazení Gauss-Krügerovo
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 3. ročník S3G ROZPIS TÉMAT PRO ŠK. ROK 2018/2019 1) Kartografické zobrazení na území ČR Cassiny-Soldnerovo zobrazení Obecné konformní kuželové zobrazení Gauss-Krügerovo
Téma 22. Ondřej Nývlt
 Téma 22 Ondřej Nývlt nyvlto1@fel.cvut.cz Náhodná veličina a náhodný vektor. Distribuční funkce, hustota a pravděpodobnostní funkce náhodné veličiny. Střední hodnota a rozptyl náhodné veličiny. Sdružené
Téma 22 Ondřej Nývlt nyvlto1@fel.cvut.cz Náhodná veličina a náhodný vektor. Distribuční funkce, hustota a pravděpodobnostní funkce náhodné veličiny. Střední hodnota a rozptyl náhodné veličiny. Sdružené
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
Nová doporučení o interní kontrole kvality krevního obrazu. Soňa Vytisková
 Nová doporučení o interní kontrole kvality krevního obrazu Soňa Vytisková 1 2 3 4 5 ÚVOD Programy vnitřní kontroly kvality klinických laboratoří mají sice svá obecná pravidla, ale je nutné je individuálně
Nová doporučení o interní kontrole kvality krevního obrazu Soňa Vytisková 1 2 3 4 5 ÚVOD Programy vnitřní kontroly kvality klinických laboratoří mají sice svá obecná pravidla, ale je nutné je individuálně
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
X = x, y = h(x) Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní
 Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní") ..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
Téma 2: Pravděpodobnostní vyjádření náhodných veličin
 0.05 0.0 0.05 0.0 0.005 Nominální napětí v pásnici Std Mean 40 60 80 00 0 40 60 Std Téma : Pravděpodobnostní vyjádření náhodných veličin Přednáška z předmětu: Spolehlivost a bezpečnost staveb 4. ročník
0.05 0.0 0.05 0.0 0.005 Nominální napětí v pásnici Std Mean 40 60 80 00 0 40 60 Std Téma : Pravděpodobnostní vyjádření náhodných veličin Přednáška z předmětu: Spolehlivost a bezpečnost staveb 4. ročník
Maturitní otázky z předmětu MATEMATIKA
 Wichterlovo gymnázium, Ostrava-Poruba, příspěvková organizace Maturitní otázky z předmětu MATEMATIKA 1. Výrazy a jejich úpravy vzorce (a+b)2,(a+b)3,a2-b2,a3+b3, dělení mnohočlenů, mocniny, odmocniny, vlastnosti
Wichterlovo gymnázium, Ostrava-Poruba, příspěvková organizace Maturitní otázky z předmětu MATEMATIKA 1. Výrazy a jejich úpravy vzorce (a+b)2,(a+b)3,a2-b2,a3+b3, dělení mnohočlenů, mocniny, odmocniny, vlastnosti
VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ. #2 Nejistoty měření
 VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ # Nejistoty měření Přesnost měření Klasický způsob vyjádření přesnosti měření chyba měření: Absolutní chyba X = X M X(S) Relativní chyba δ X = X(M) X(S) - X(M) je naměřená hodnota
VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ # Nejistoty měření Přesnost měření Klasický způsob vyjádření přesnosti měření chyba měření: Absolutní chyba X = X M X(S) Relativní chyba δ X = X(M) X(S) - X(M) je naměřená hodnota
pravděpodobnosti, popisné statistiky
 8. Modelová rozdělení pravděpodobnosti, popisné statistiky Rozdělení pravděpodobnosti Normální rozdělení jako statistický model Přehled a aplikace modelových rozdělení Popisné statistiky Anotace Klasickým
8. Modelová rozdělení pravděpodobnosti, popisné statistiky Rozdělení pravděpodobnosti Normální rozdělení jako statistický model Přehled a aplikace modelových rozdělení Popisné statistiky Anotace Klasickým
Filip Hroch. Astronomické pozorování. Filip Hroch. Výpočet polohy planety. Drahové elementy. Soustava souřadnic. Pohyb po elipse
 ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
Chyby a neurčitosti měření
 Radioelektronická měření (MREM) Chyby a neurčitosti měření 10. přednáška Jiří Dřínovský Ústav radioelektroniky FEKT VUT v Brně Základní pojmy Měření je souhrn činností s cílem určit hodnotu měřené veličiny
Radioelektronická měření (MREM) Chyby a neurčitosti měření 10. přednáška Jiří Dřínovský Ústav radioelektroniky FEKT VUT v Brně Základní pojmy Měření je souhrn činností s cílem určit hodnotu měřené veličiny
Úvod do teorie měření. Eva Hejnová
 Úvod do teorie měření Eva Hejnová Program semináře 1. Základní pojmy - metody měření, druhy chyb, počítání s neúplnými čísly, zaokrouhlování 2. Chyby přímých měření - aritmetický průměr a směrodatná odchylka,
Úvod do teorie měření Eva Hejnová Program semináře 1. Základní pojmy - metody měření, druhy chyb, počítání s neúplnými čísly, zaokrouhlování 2. Chyby přímých měření - aritmetický průměr a směrodatná odchylka,
Stavební fakulta Katedra mechaniky. Jaroslav Kruis, Petr Štemberk
 České vysoké učení technické v Praze Stavební fakulta Katedra mechaniky Fuzzy množiny, fuzzy čísla a jejich aplikace v inženýrství Jaroslav Kruis, Petr Štemberk Obsah Nejistoty Teorie pravděpodobnosti
České vysoké učení technické v Praze Stavební fakulta Katedra mechaniky Fuzzy množiny, fuzzy čísla a jejich aplikace v inženýrství Jaroslav Kruis, Petr Štemberk Obsah Nejistoty Teorie pravděpodobnosti
Základy teorie pravděpodobnosti
 Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Pravděpodobnost a aplikovaná statistika
 Pravděpodobnost a aplikovaná statistika MGR. JANA SEKNIČKOVÁ, PH.D. 8. KAPITOLA STATISTICKÉ TESTOVÁNÍ HYPOTÉZ 22.11.2016 Opakování: CLV příklad 1 Zadání: Před volbami je v populaci státu 52 % příznivců
Pravděpodobnost a aplikovaná statistika MGR. JANA SEKNIČKOVÁ, PH.D. 8. KAPITOLA STATISTICKÉ TESTOVÁNÍ HYPOTÉZ 22.11.2016 Opakování: CLV příklad 1 Zadání: Před volbami je v populaci státu 52 % příznivců
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Zaměření vybraných typů nerovností vozovek metodou laserového skenování
 Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
správně - A, jeden celý příklad správně - B, jinak - C. Pro postup k ústní části zkoušky je potřeba dosáhnout stupně A nebo B.
 Zkouška z předmětu KMA/PST. Anotace předmětu Náhodné jevy, pravděpodobnost, podmíněná pravděpodobnost. Nezávislé náhodné jevy. Náhodná veličina, distribuční funkce. Diskrétní a absolutně spojitá náhodná
Zkouška z předmětu KMA/PST. Anotace předmětu Náhodné jevy, pravděpodobnost, podmíněná pravděpodobnost. Nezávislé náhodné jevy. Náhodná veličina, distribuční funkce. Diskrétní a absolutně spojitá náhodná
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 6 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografická zobrazení použitá na našem území důležitá jsou zejména zobrazení pro státní mapová díla v
Kartografie 1 - přednáška 6 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografická zobrazení použitá na našem území důležitá jsou zejména zobrazení pro státní mapová díla v
Gymnázium Česká a Olympijských nadějí, České Budějovice, Česká 64, 37021
 Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
Pravděpodobnost a aplikovaná statistika
 Pravděpodobnost a aplikovaná statistika MGR. JANA SEKNIČKOVÁ, PH.D. 2. KAPITOLA PODMÍNĚNÁ PRAVDĚPODOBNOST 3. KAPITOLA NÁHODNÁ VELIČINA 9.11.2017 Opakování Uveďte příklad aplikace geometrické definice pravděpodobnosti
Pravděpodobnost a aplikovaná statistika MGR. JANA SEKNIČKOVÁ, PH.D. 2. KAPITOLA PODMÍNĚNÁ PRAVDĚPODOBNOST 3. KAPITOLA NÁHODNÁ VELIČINA 9.11.2017 Opakování Uveďte příklad aplikace geometrické definice pravděpodobnosti
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Náhodné chyby přímých měření
 Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
Úvod do GIS. Prostorová data I. část. Pouze podkladová prezentace k přednáškám, nejedná se o studijní materiál pro samostatné studium.
 Úvod do GIS Prostorová data I. část Pouze podkladová prezentace k přednáškám, nejedná se o studijní materiál pro samostatné studium. Karel Jedlička Prostorová data Analogová prostorová data Digitální prostorová
Úvod do GIS Prostorová data I. část Pouze podkladová prezentace k přednáškám, nejedná se o studijní materiál pro samostatné studium. Karel Jedlička Prostorová data Analogová prostorová data Digitální prostorová
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
Návod k použití softwaru Solar Viewer 3D
 Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
EXTRAKT z mezinárodní normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním materiálem o normě.
 EXTRAKT z mezinárodní normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním materiálem o normě. Inteligentní dopravní systémy (ITS) Označení poloh pro geografické databáze Část 3:
EXTRAKT z mezinárodní normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním materiálem o normě. Inteligentní dopravní systémy (ITS) Označení poloh pro geografické databáze Část 3:
FYZIKA I. Gravitační pole. Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art.
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERITA OSTRAVA FAKULTA STROJNÍ FYIKA I Gravitační pole Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar Mádrová
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERITA OSTRAVA FAKULTA STROJNÍ FYIKA I Gravitační pole Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar Mádrová
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
OBSAH 1 Úvod Fyzikální charakteristiky Zem Referen ní plochy a soustavy... 21
 OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
8.1. Definice: Normální (Gaussovo) rozdělení N(µ, σ 2 ) s parametry µ a. ( ) ϕ(x) = 1. označovat písmenem U. Její hustota je pak.
 rozdělení N(µ, σ 2 ) s parametry µ a. ( ) ϕ(x) = 1. označovat písmenem U. Její hustota je pak.") 8. Normální rozdělení 8.. Definice: Normální (Gaussovo) rozdělení N(µ, ) s parametry µ a > 0 je rozdělení určené hustotou ( ) f(x) = (x µ) e, x (, ). Rozdělení N(0; ) s parametry µ = 0 a = se nazývá normované
8. Normální rozdělení 8.. Definice: Normální (Gaussovo) rozdělení N(µ, ) s parametry µ a > 0 je rozdělení určené hustotou ( ) f(x) = (x µ) e, x (, ). Rozdělení N(0; ) s parametry µ = 0 a = se nazývá normované
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
vztažný systém obecné napětí předchozí OBSAH další
 p05 1 5. Deformace těles S deformací jako složkou mechanického pohybu jste se setkali už ve statice. Běžně je chápána jako změna rozměrů a tvaru tělesa. Lze ji popsat změnami vzdáleností různých dvou bodů
p05 1 5. Deformace těles S deformací jako složkou mechanického pohybu jste se setkali už ve statice. Běžně je chápána jako změna rozměrů a tvaru tělesa. Lze ji popsat změnami vzdáleností různých dvou bodů
Úvod do teorie měření. Eva Hejnová
 Úvod do teorie měření Eva Hejnová Literatura: Novák, R. Úvod do teorie měření. Ústí nad Labem: UJEP, 2003 Sprušil, B., Zieleniecová, P.: Úvod do teorie fyzikálních měření. Praha: SPN, 1985 Brož, J. a kol.
Úvod do teorie měření Eva Hejnová Literatura: Novák, R. Úvod do teorie měření. Ústí nad Labem: UJEP, 2003 Sprušil, B., Zieleniecová, P.: Úvod do teorie fyzikálních měření. Praha: SPN, 1985 Brož, J. a kol.
TERMOMECHANIKA 15. Základy přenosu tepla
 FSI VUT v Brně, Energetický ústav Odbor termomechaniky a techniky prostředí Prof. Ing. Milan Pavelek, CSc. TERMOMECHANIKA 15. Základy přenosu tepla OSNOVA 15. KAPITOLY Tři mechanizmy přenosu tepla Tepelný
FSI VUT v Brně, Energetický ústav Odbor termomechaniky a techniky prostředí Prof. Ing. Milan Pavelek, CSc. TERMOMECHANIKA 15. Základy přenosu tepla OSNOVA 15. KAPITOLY Tři mechanizmy přenosu tepla Tepelný
Výsledky úloh. 1. Úpravy výrazů + x 0, 2x 1 2 2, x Funkce. = f) a 2.8. ( ) ( ) 1.6. , klesající pro a ( 0, ) ), rostoucí pro s (, 1)
 a 2.8. ( ) ( ) 1.6. , klesající pro a ( 0, ) ), rostoucí pro s (, 1)") Výsledky úloh. Úpravy výrazů.. +, + R.., a 0, a b.., a ± b, a b a b a +.. + a +, 0, a.., a 0; ± ; n + a.. a + b 9, > 0.7., a ± b a b m n.8., m 0, n 0, m n.9. a, a > 0 m + n.0., ;0; ;;.., k.. tg, k sin.
Výsledky úloh. Úpravy výrazů.. +, + R.., a 0, a b.., a ± b, a b a b a +.. + a +, 0, a.., a 0; ± ; n + a.. a + b 9, > 0.7., a ± b a b m n.8., m 0, n 0, m n.9. a, a > 0 m + n.0., ;0; ;;.., k.. tg, k sin.
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED