Experimentální určení elipsoidu setrvačnosti hnacího agregátu
|
|
|
- Helena Novotná
- před 8 lety
- Počet zobrazení:
Transkript
1 Experimentální určení elipsoidu setrvačnosti hnacího agregátu Zpracoval: Pavel BRABEC Pracoviště: KVM Tento materiál vznikl jako součást projektu n-tech 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. n-tech 2, označuje společný projekt Technické univerzity v Liberci a jejích partnerů - Škoda Auto a.s. a Denso Manufacturing Czech s.r.o. Cílem projektu, který je v rámci Operačního programu Vzdělávání pro konkurenceschopnost (OP VK) financován prostřednictvím MŠMT z Evropského sociálního fondu (ESF) a ze státního rozpočtu ČR, je inovace studijního programu ve smyslu progresivních metod řízení inovačního procesu se zaměřením na rozvoj tvůrčího potenciálu studentů. Tento projekt je nutné realizovat zejména proto, že na trhu dochází ke zrychlování inovačního cyklu a zkvalitnění jeho výstupů. ČR nemůže na tyto změny reagovat bez osvojení nejnovějších inženýrských metod v oblasti inovativního a kreativního konstrukčního řešení strojírenských výrobků. Majoritní cílovou skupinou jsou studenti oborů novační inženýrství a Konstrukce strojů a zařízení. Cíle budou dosaženy inovací VŠ přednášek a seminářů, vytvořením nových učebních pomůcek a realizací studentských projektů podporovaných experty z partnerských průmyslových podniků. Délka projektu:

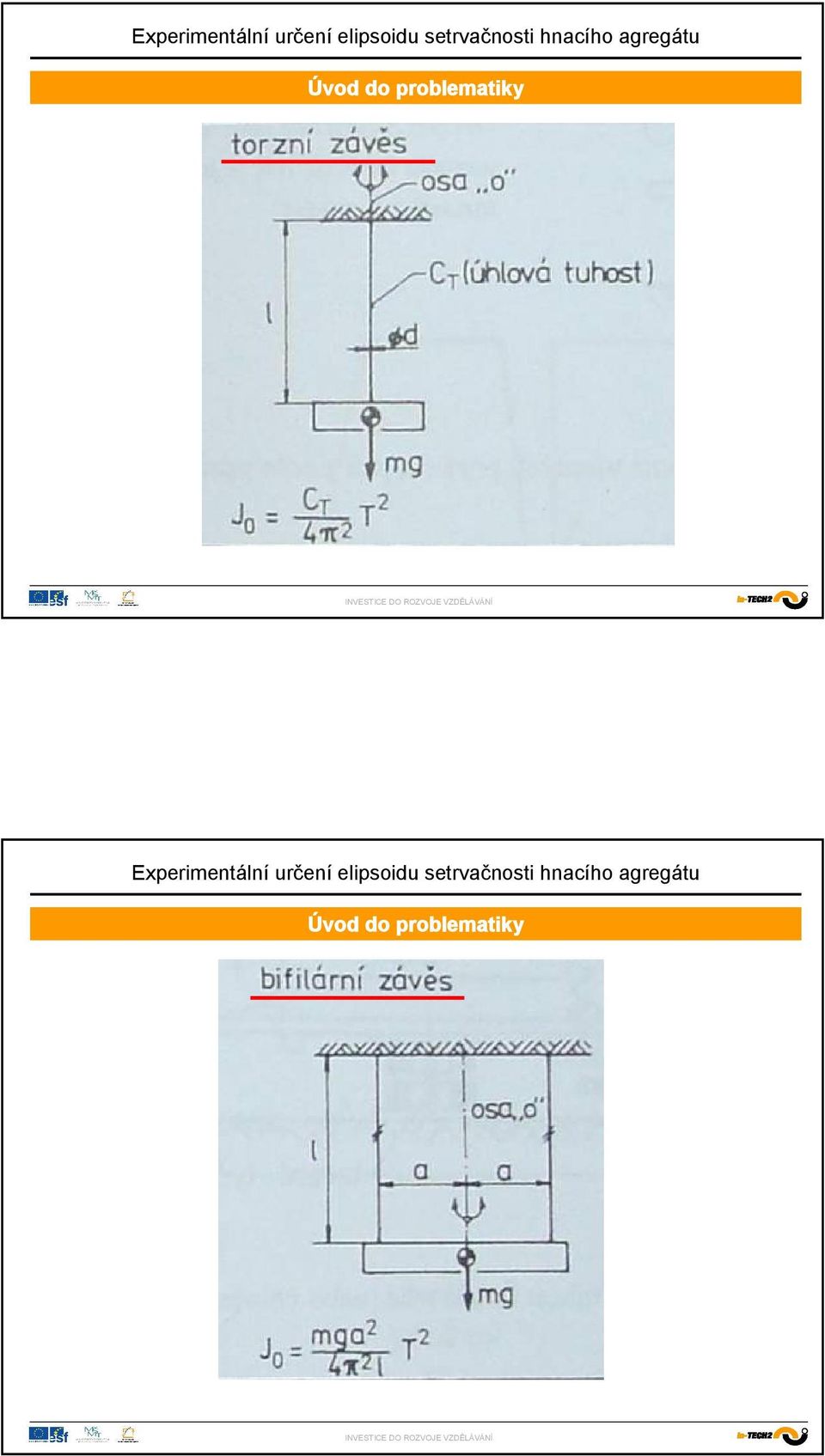
2 Úvod do problematiky Proč měřit matici momentů setrvačnosti agregátu? Naměřené matice momentů setrvačnosti agregátu jsou v praxi dále využity jako jedny ze vstupních parametrů simulačních výpočtů. Zejména tyto údaje se dále používají pro optimalizaci pružného uložení agregátu a simulaci crash testů vozidla. Úvod do problematiky Základní metody určení momentu setrvačnosti tělesa? K určení momentů setrvačnosti se používají různé metody. Všechny tyto metody jsou založeny na principu závislosti mezi momentem setrvačnosti tělesa a frekvencí vlastního kmitání. Základní metody určení momentu setrvačnosti tělesa jsou založeny na principu fyzikálního kyvadla, torzního závěsu nebo bifilárního závěsu.

3 Úvod do problematiky Steinerova věta Úvod do problematiky

4 Úvod do problematiky Úvod do problematiky
5 Úvod do problematiky Úvod do problematiky Příklad: klad: Určen ení momentu setrvačnosti vozidla k svislé ose princip torzního ho kyvadla: Při měření se určí doba kmitu vozidla s plošinou T vp a doba kmitu samotné plošiny T p.

6 Úvod do problematiky Příklad: klad: Určen ení momentu setrvačnosti vozidla k svislé ose princip torzního ho kyvadla: Známe-li úhlovou tuhost torzní tyče, pak podle vztahu určíme moment setrvačnosti vozidla s plošinou J zvp (~T vp ) a moment setrvačnosti plošiny J zp (~ T p ). Moment setrvačnosti vozidla vzhledem k jeho svislé ose z se určí z výrazu Úvod do problematiky Určen ení momentu setrvačnosti vozidla k podéln lné ose princip fyzikáln lního ho kyvadla podepřen eného ho pružinou inou:

7 Úvod do problematiky Určen ení momentu setrvačnosti vozidla k příčnép ose fyzikáln lní kyvadlo podepřen ené pružinou inou: Úvod do problematiky Určen ení momentu setrvačnosti vozidla k svislé ose princip fyzikáln lního ho kyvadla :

8 Úvod do problematiky Zkušební zařízení pro měření pro měření vozidel využívající princip aktivního silového elementu - možnosti zařízení: určení hmotnosti, polohy těžiště a matice momentů setrvačnosti vozidla - přesnost měření pod 5 % s výjimkou deviačních momentů, zde z důvodu menších velikostí než u hlavních momentů setrvačnosti je dovolena chyba 15 % centrální kloub plošina rám Úvod do problematiky

9 Pro určení momentů setrvačnosti byla užita nepřímá metoda měřením doby kmitu tělesa zavěšeného na jednovláknovém (torzním) závěsu. Měření se provádělo vždy bez náplní (tj. bez oleje a chladící kapaliny). Pro výpočet momentu setrvačnosti na torzním závěsu platí vzorec: 4 G d T 128 L 2 kde - moment setrvačnosti, G - modul pružnosti ve smyku pružinového drátu, d - průměr pružinového drátu, L - délka závěsu, T - doba jednoho kmitu. Pro potřeby měření byl vytvořen závěs, který se skládal z kardanových kloubů a pružinového drátu. Konce závěsu byly opatřeny závěsnými třmeny, do nichž byl pružinový drát upevněn svěrným způsobem. Oba třmeny obsahovaly křížové (kardanové) klouby. Tato konstrukce umožňovala měřenému tělesu viset volně po celou dobu kmitu a u všech případů zavěšení.

10 Nyní se budeme zabývat měřením jednotlivých veličin ve vztahu pro výpočet momentu setrvačnosti. Stanovení modulu pružnosti ve smyku drátu Modul pružnosti ve smyku drátu byl určen použitím závaží o známém momentu setrvačnosti, kdy jsme měřili čas jednoho kmitu a následně jsme vypočítali modul pružnosti v krutu. Měření délky drátu závěsu Délka závěsu torzního drátu byla opakovaně změřena ocelovým měřítkem (pravítkem) v zatíženém stavu. Nyní se budeme zabývat měřením jednotlivých veličin ve vztahu pro výpočet momentu setrvačnosti. Měření průměru drátu závěsu Hodnota průměru drátu je velmi důležitá, protože ve vztahu pro výpočet momentu setrvačnosti na torzním závěsu je ve čtvrté mocnině. S ohledem na předpokládanou kuželovitost a ovalitu byl průměr drátu měřen mikrometrem ve čtyřech rovinách vždy ve dvou průměrech k sobě kolmých. Výsledná hodnota průměru byla pak určena statisticky. z 2 2 d stř 4 d 4 o d d do o z

11 Nyní se budeme zabývat měřením jednotlivých veličin ve vztahu pro výpočet momentu setrvačnosti. Měření doby jednoho kmitu Doba jednoho kmitu byla měřena pomocí optického čidla reagující na zaclonění světelného paprsku clonkou, která byla upevněna na kývajícím se tělese. Při měření bylo vždy provedeno nejméně 30 kmitů, ze kterých byla následně spočtena průměrná hodnota. Ověření snímače provedl Český metrologický institut. Popis sestrojení elipsoidu setrvačnosti 1 Vynášíme-li z těžiště hodnoty J v určitém měřítku jako vektory ve směru osy závěsu, vyplní koncové body v prostoru elipsoid setrvačnosti. Obr.: Ukázka principu sestrojení elipsoidu setrvačnosti v rovině klikového hřídele.

12 Popis sestrojení elipsoidu setrvačnosti Měření úhlů natočení souřadného systému vůči závěsu s torzním drátem Aby soustava rovnic obsahovala pouze neznámé momenty setrvačnosti k osám a deviační momenty je nezbytné ještě změřit úhly mezi osami souřadného systému a osou závěsu. Popis sestrojení elipsoidu setrvačnosti K určení matice setrvačnosti (tj. i elipsoidu setrvačnosti) musíme odkývat těleso nejméně kolem šesti různých os užitím různých závěsných bodů - získáme tak stejný počet hodnot momentů setrvačnosti. V našem případě bylo vždy provedeno minimálně deset měření momentu setrvačnosti k různým osám a následně byl matematicky proveden vypočet elipsoidu setrvačnosti proložení naměřených bodů elipsoidem setrvačnosti pomocí metody nejmenších čtverců.

13 Popis sestrojení elipsoidu setrvačnosti Obr.: Elipsoid setrvačnosti ukázka aproximace naměřenými body v jedné rovině (tzn. elipsa - 2D případ). Popis sestrojení elipsoidu setrvačnosti Zavěšení tělesa na torzní závěs do i-tého bodu Odečtení Odečtení úhlu úhlu,, a a Rozkývání Změření Změření doby doby jednoho jednoho kmitu kmitu i 6 NE Proložení naměřených bodů elipsoidem setrvačnosti pomocí metody nejmenších čtverců Výpočet momentů setr. k osám závěsu (i hodnot) ANO Obr.: Vývojový diagram zobrazující navrženou metodu pro určení matice setrvačnosti (ES).

14 Stanovení polohy těžiště Určení polohy těžiště bylo provedeno na základě měření na trojvláknovém závěsu (měřením tahových sil v jednotlivých vláknech). Nejprve byla zjištěna poloha těžiště v jedné rovině XY, následně byla zjištěna poloha těžiště v rovině kolmé na původní (YZ). Stanovení polohy těžiště Velikost sil v závěsech byly měřeny pomocí snímačů U3 (popř. S9) a měřící ústředny MGC plus od firmy HOTTNGER BALDWN MESSTECHNK GmbH. K zobrazení a vyhodnocení hodnot sil byl použit software CatmanEasy (od stejné firmy).

15 Stanovení polohy těžiště Zavěšení tělesa na třívláknový závěs rovina XY Zápis hodnot: X T, Y T, Z T Odečtení Odečtení poloh poloh a a sil sil v v bodech bodech A, A, B a a C Výpočet polohy těžiště v osách X, Y Výpočet polohy těžiště v osách Y aritm. průměr Výpočet polohy těžiště v osách Y, Z Zavěšení tělesa na třívláknový závěs rovina YZ Odečtení Odečtení poloh poloh a a sil sil v v bodech bodech D, D, E a a F F Obr.: Vývojový diagram zobrazující navržený postup určení polohy těžiště. Určení elipsoidu setrvačnosti samotného agregátu Při stanovení momentů setrvačnosti těles složitějších tvarů se neobejdeme bez přípravků, které umožňují zavěšení tělesa v různých polohách na torzní závěs. Z tohoto důvodu byl vyroben pomocný rám pro upnutí agregátu. Agregát byl upnut do pomocného rámu definovaným způsobem a to tak, aby osy zvoleného souřadného systému agregátu byly rovnoběžné s osami souřadného X Z systému rámu. Y Y X Z

16 Určení elipsoidu setrvačnosti samotného agregátu Protože momenty setrvačnosti rámu nejsou zanedbatelné, bylo nutno provést dvojí měření. První měření bylo provedeno pro sestavu (tj. rám+agregát). Ve druhé fázi byl rám měřen samostatně z důvodu pozdějšího odečtení rámu od měřené sestavy. Určení elipsoidu setrvačnosti samotného agregátu Agregát byl upnut do pomocného rámu definovaným způsobem a následně byla provedena první část měření sestavy (rám+agregát).

17 Určení elipsoidu setrvačnosti samotného agregátu Ve druhé fázi byl rám měřen samostatně pro odečtení rámu od měřené sestavy. Určení elipsoidu setrvačnosti samotného agregátu Pro odečtení rámu od měřené sestavy byla použita Steinerova věta. _ =

18 Určení elipsoidu setrvačnosti samotného agregátu Pro odečtení rámu od měřené sestavy byla použita Steinerova věta. _ = Elipsoid setrvačnosti agregátu tu Kompletní postup Soustava = Rám+ Agregát Rám + Měření Měření elipsoidu elipsoidu setrvačnosti setrvačnosti Měření Měření elipsoidu elipsoidu setrvačnosti setrvačnosti ANO i 6 NE Výpočet elipsoidu setrvačnosti ANO i 6 NE Výpočet elipsoidu setrvačnosti Tisk protokolu Měření Měření polohy polohy těžiště těžiště Výpočet polohy těžiště Měření Měření polohy polohy těžiště těžiště Výpočet polohy těžiště Výpočet elipsoidu setrvačnosti agregátu (odečtení elipsoidu setrvačnosti rámu od elipsoidu setrvačnosti soustavy pomocí Steinerovy věty) Obr.: Vývojový diagram zobrazující kompletní postup pro stanovení elipsoidu setrvačnosti agregátu.
 Obr.")
19 Tisk protokolu Obr.: Ukázka z užití softwaru pro zpracování naměřených dat. Verifikace, Chyba metody Verifikace vypočtených a naměřených hodnot pomocí upínacích rámů. Ověřování měření pomocí jednoduchého tělesa upnutého v rámu. Experimentální určení polohy hlavní osy setrvačnosti u polotovaru umístěného napříč v rámu. Početní stanovení přesnosti měření

20 Verifikace pomocí upínacích rámů Pro měření agregátu nebo samotného motoru byly vyrobeny dva pomocné rámy. Lišily se velikostí, kde první byl používán u agregátů (motorů) osobních vozidel a druhý větší rám byl použit k měření motoru nákladního vozidla. Pro první přiblížení přesnosti měření byly tyto rámy namodelovány pomocí 3D CAD softwaru, který umožňoval výpočet hmotnostních parametrů (hmotnost, poloha těžiště, matice setrvačnosti) a následně byly tyto veličiny zjištěny měřením rámu. Použitý vztah pro vyjádření rozdílů získaných výsledků v procentech: HN H HN Verifikace, Chyba metody V 100 % H N hodnota naměřená H V hodnota vypočtená pomocí 3D CADu Verifikace, Chyba metody Verifikace pomocí upínacích rámů Model rámu pro uložení agregátu osobního vozidla Chyba hlavních momentů setrvačnosti: Model rozměrnějšího rámu pro uložení motoru nákladního vozidla Chyba hlavních momentů setrvačnosti: ,31 % 0,12 % 2,00 % ,97 % 2,32 % 0,87 %

21 Verifikace, Chyba metody Konstrukční úpravy pro větší přesnost měření Bylo zjištěno, že by bylo vhodné přidat ještě další měřící body. Tyto nové varianty se upínaly mimo rohy rámu, schematicky je to zobrazeno na následujícím obrázku. Obr.: Ukázka upevňovacích bodů mimo rohy u většího rámu (dalších pět bodů, dva na zákl. rámu a tři na přidaných příčkách). Verifikace, Chyba metody Konstrukční úpravy pro větší přesnost měření Ukázalo se, že tyto nově vytvořené upínací body mají značný upřesňující vliv na výsledky výpočtu naměřeného elipsoidu setrvačnosti pomocí metody nejmenších čtverců. původní upínací body nové upínací body Obr.: Znázornění upřesňujícího vlivu doplňkových upínacích bodů (ukázáno na rovinném případě elipsy).
22 Verifikace, Chyba metody Ověřování měření pomocí jednoduchého tělesa upnutého v rámu Bylo vybráno geometricky jednoduché těleso, které se podrobilo úplnému postupu měření jako samotný agregát. Jednoduchý tvar tělesa byl volen kvůli možnosti prostého výpočtu matice momentu setrvačnosti tělesa, dále byl výpočet zkontrolován pomocí CAD systému. Poloha polotovarů byla volena tak, aby jeden deviační moment nebyl nulový. Verifikace, Chyba metody Ověřování měření pomocí jednoduchého tělesa upnutého v rámu Pokud použijeme stejné vyhodnocení chyby X YX ZX XY Y ZY XZ 0,3321 YZ Z 2,5298 1,1068 2,5298 % 0,4523 U hlavních momentů setrvačnosti byla shoda velmi dobrá, největší odchylka byla ve směru osy y a byla menší než 1,5%. U dvou nulových deviačních momentů nejsme schopni určit relativní chybu, můžeme stanovit jen chybu absolutní (tzn. -0,0895 kg.m -2 a -0,0198 kg.m -2 ). Poslední deviační moment byl změřen přibližně s relativní chybou 2,5 %. Obr.: Fotografie zvoleného uspořádání polotovarů pro verifikaci měření.
23 Verifikace, Chyba metody Experimentální určení polohy hlavní osy setrvačnosti u polotovaru umístěného napříč v rámu Dalším měřením pro ověření metody bylo zvoleno umístění polotovaru do polohy tělesové úhlopříčky pomocného rámu. Postup měření byl shodný s verifikací popsanou u předchozího případu. Z matic momentů setrvačnosti byly dále určeny a porovnány prostorové úhly hlavní osy setrvačnosti od souřadného systému. Verifikace, Chyba metody Experimentální určení polohy hlavní osy setrvačnosti u polotovaru umístěného napříč v rámu Pokud použijeme stejné vyhodnocení chyby X YX ZX XY Y ZY XZ 0,2455 YZ 0,6231 Z 0,6673 0,6231 2,5425 1,4292 0,6673 1,4292 % 1, , ,2953 % 1, U porovnání vypočtených a naměřených hodnot momentů setrvačnosti vyšla průměrná chyba 1,10 %, maximální odchylka byla ve směru osy y a to 2,54 %. Absolutní chyba u směru hlavní osy setrvačnosti (shodné s osou polotovaru) byla menší než 1 u všech tří prostorových úhlů. Obr.: Fotografie zvoleného uspořádání polotovarů pro verifikaci měření.
24 Verifikace, Chyba metody Početní stanovení přesnosti měření Jelikož se jedná o složité měření, po kterém ještě následují matematické operace, byla k určení chyby měření momentu setrvačnosti zvolena metoda, kde relativní chyba momentu setrvačnosti se rovná odmocnině kvadrátu součtu relativních chyb všech veličin důležitých k určení momentu setrvačnosti. n 2 i Jedná se o maximální relativní chybu měření momentu setrvačnosti při použití všech největších možných chyb měření u všech vstupů do výpočtu elipsoidu setrvačnosti. Např. u vypočtu relativní chyby momentu setrvačnosti pro motor s označením kw MP vyšla hodnota max. chyby 6,55%. i Vliv polohy klikového hřídele Účinek pootočení klikového hřídele na elipsoid setrvačnosti agregátu Pro zjištění citlivosti na tento parametr byly použity naměřené hodnoty pro agregát, který se skládal z motoru kw TD DPF a převodovky MQ350.
25 Vliv polohy klikového hřídele Nejprve byl měřen tento agregátu s nastavenou polohou klikového hřídele tak, že píst prvního válce byl v horní úvrati. Dále bylo potřeba určit elipsoid setrvačnosti agregátu i v jiných polohách klikového hřídele. Jelikož měření je velmi pracné a zdlouhavé, byla zvolena varianta, kdy kompletní klikový mechanismus byl namodelován jako 3D model v CADu tzn. pro ostatní polohy klikového hřídele se jedná o kombinaci mezi měřením a modelováním. Bylo zvoleno dalších šest poloh klikového hřídele ( = 0, 30, 45, 60, 90,135, 180 ). Vliv polohy klikového hřídele 3D model
26 Vliv polohy klikového hřídele Vypočtený elipsoid setrvačnosti klikového mechanismu Vliv polohy klikového hřídele xx zz yy 0,36 0,12 0,34 0,32 0,115 XX, ZZ (kg.m 2 ) 0,3 0,28 0,26 0,11 0,105 YY (kg.m 2 ) 0,24 0,22 0,1 Maximáln lní změna byla přiblip ibližně 17%. 0,2 0, a ( ) KLK. MECHAN. Z T [mm] XX [kg.m 2 ] YY [kg.m 2 ] ZZ [kg.m 2 ] Obr.: Závislost momentů setrvačnosti klikového mechanismu k osám na úhlu pootočení klikového hřídele. Maximum Minimum Max. / Min. 31, ,598 1,06 0, , ,10 0, , ,17 0, , ,05
27 Vliv polohy klikového hřídele Závislost momentů setrvačnosti agregátu (popř. motoru) k osám na úhlu pootočení klikového hřídele AGREGÁT Z T [mm] XX [kg.m 2 ] YY [kg.m 2 ] ZZ [kg.m 2 ] Maximum 119, , , ,37479 Minimum 119, , , ,36113 Max. / Min. 1,0013 1,0017 1,0015 1, ,1252 % 100,1691 % 100,1465 % 100,1105 % Maximáln lní změna byla přiblip ibližně jen 0,2%. MOTOR Z T [mm] XX [kg.m 2 ] YY [kg.m 2 ] ZZ [kg.m 2 ] Maximum 152,6293 7, , , Minimum 152,4318 7, , , Max. / Min. 1,0013 1,0029 1,0016 1, ,1296 % 100,2889 % 100,1595 % 100,2439 % Maximáln lní změna byla přiblip ibližně jen 0,3%. Vliv polohy klikového hřídele Pro posouzení vlivu příslušenství bylo zvoleno několik variant měření motorů, či agregátů s různým uspořádáním. Velikost změny momentu setrvačnosti závisí na faktorech: - momentu setrvačnosti dané součásti, - hmotnosti, - vzdálenosti od těžiště. Velký význam má vzdálenost od těžiště.
28 Vliv polohy klikového hřídele Vliv kompresoru klimatizace na elipsoid setrvačnosti malého motoru s označením 1.2 MP hmotnost motoru: 80,7 kg Data kompresoru pro klimatizaci - hmotnost: 4,75 kg - přibližné rozměry: průměr 115 mm délka 200 mm Obr.: Fotografie a stručná data kompresoru pro klimatizaci. Obr.: Schématicky znázorněná poloha kompresoru pro klimatizaci. Vliv kompresoru klimatizace na elipsoid setrvačnosti malého motoru s označením 1.2 MP Pokud tyto změny vyjádříme v procentech podle vztahu MotorSKompresorem Motor Motor 100 Vliv polohy klikového hřídele 6,20 81,37 618,42 81,37 10,75 69,11 618,42 69,11 13,06 % velmi mění všechny hodnoty deviačních momentů hodnoty osových momentů setrvačnosti se mění řádově v desítkách procent. při změně hmotnosti motoru o velikosti 4,6% došlo k 13% změně osového momentu setrvačnosti v ose Z.
29 Vliv polohy klikového hřídele Vliv filtru sání na elipsoid setrvačnosti agregátu osobního automobilu (1.4 59kW MP-MQ200) Nejdříve byl agregát měřen bez filtru sání a později byla měřena druhá varianta s filtrem. Hmotnost plastového filtru sání byla 1,17kg (což je cca 0,9% z celkové hmotnosti agregátu). Vliv polohy klikového hřídele Vliv filtru sání na elipsoid setrvačnosti agregátu osobního automobilu (1.4 59kW MP-MQ200) při takto malé změně hmotnosti (ale na velké vzdálenosti od těžiště) došlo při všech deseti měření doby kmitu sestavy (tzn. rám+agregát) v různé poloze k naměření delší doby jednoho kmitu pro agregát s filtrem sání. Rozdíly naměřených dob jednoho kmitu se pohybovaly okolo 0,6%. Pokud tyto změny vyjádříme procentuálně podle stejného vzorce jako v minulém případě, tak nám vyjde: 1,33 1,52 49,79 1,52 3,84 1,35 49,79 1,35 0,65 %
30 Vliv polohy klikového hřídele Elipsoid setrvačnosti motoru nákladního vozidla s příslušenstvím a bez něho Pro měření ES byly zvoleny tři varianty uspořádání příslušenství motoru, tyto varianty jsou blíže popsány v následující tabulce. Hmotnost (kg) Bez příslušenství Standard Avalon Accessories ndustrial Applications Accessories Alternátor 6,934 Ne Ano Ano Kompresor klimatizace 8,046 Ne Ano Ano Kompresor (brzdy) Knorr 10,899 Ne Ano Ano Držák alternátoru a klimakompresoru 5,797 Ne Ano Ano Sací potrubí (Low Mount Turbo) 6,161 Ano Ano Ne Hydraulické čerpadlo 2,291 Ne Ne Ano Sací potrubí (High Mount Turbo) 4,495 Ne Ne Ano Vliv polohy klikového hřídele Elipsoid setrvačnosti motoru nákladního vozidla s příslušenstvím a bez něho Hmotnost motoru i s příslušenstvím je cca 370 kg. Rozdíl v hmotnosti motoru s a bez příslušenství činí přibližně 10%. Při této změně hmotnosti měřeného motoru se nám ale osové momenty setrvačnosti měnily v rozmezí 15 až 20 %. 15,25 104,76 275,41 104,76 19,99 11,76 275,41 11,76 16,47 % ndustrial Applications Accessories Standard Avalon Accessories No Accessories
31 Shrnutí Byla vyvinuta metodika měření k určení matice momentů setrvačnosti, polohy těžiště a hmotnosti agregátu (možno použít na obecné těleso). Metodika byla ověřena při měření několika agregátů, či motorů (10 agregátů a 1 motor používaných u osobních vozidel, 1 motor určený pro užitkový vůz), v některých případech i pro více variant uspořádání příslušenství motoru. Pro vyhodnocení naměřených dat byl zhotoven speciální software. Měření se provádělo vždy bez náplní (tj. bez oleje a chladící kapaliny). Při návrhu metodiky měření byl dán velký požadavek na přesnost měření. Z tohoto důvodu bylo naměřeno vždy více hodnot a k určení elipsoidu setrvačnosti byla použita aproximace pomocí metody nejmenších čtverců. Shrnutí V první části kapitoly věnující se přesnosti měření je porovnání naměřených hodnot na tělese o známé matici setrvačnosti, dále se tato kapitola věnovala matematickému odvození přesnosti měření. Verifikace měření byla provedena s využitím pomocných rámů, tvarově jednoduchého tělesa a napříč uloženého polotovaru. Relativní chyba mezi hodnotami naměřenými a vypočtenými CAD programem byla u všech kontrolovaných momentů setrvačnosti do 2.5 %. Navržená metoda měření dokázala odhalit i poměrně malý rozdíl v měřením příslušenství agregátu. Například bylo možno sledovat změnu při odebrání filtru sání motoru, který tvořil 0,9% celkové hmotnosti agregátu.
32 Shrnutí Vliv polohy KH na celkový ES agregátu, či motoru je zanedbatelný. U samotného klikového mechanismu se jedná řádově o desítky procent (max. hodnota poměru Max./Min*100 [%] byla 17%). Změna poměru max. a min. momentu setrvačnosti k ose u celého agregátu je dokonce daleko menší než jedno procento. Max. změna byla přibližně jen 0,2 %, resp. u samotného motoru 0,3%. Na výsledné hodnoty momentů setrvačnosti a polohy těžiště agregátu má podstatně větší vliv přidávaná či odebíraná hmota v podobě příslušenství motoru. Velikost změny momentu setrvačnosti závisí na faktorech: momentu setrvačnosti dané součásti, hmotnosti a vzdálenosti od těžiště. Velký význam má vzdálenost od těžiště, kdy poměrně i malá hmota dokáže ovlivnit celkový moment setrvačnosti agregátu. Shrnutí - Náměty pro další práci Pokračováním práce by mohlo být se dále zabývat podrobněji některými dalšími problémy: vliv kapalinových náplní motoru, zjednodušení metody (její pracnosti) při zachování přesnosti měření.
33 Děkuji za pozornost
Experimentální určení elipsoidu setrvačnosti hnacího agregátu
 Experimentální určení elipsoidu setrvačnosti hnacího agregátu Zpracoval: Pavel BRABEC Pracoviště: KVM inovovaná verze - 2012 Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Experimentální určení elipsoidu setrvačnosti hnacího agregátu Zpracoval: Pavel BRABEC Pracoviště: KVM inovovaná verze - 2012 Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
TECHNICKÁ UNIVERZITA V LIBERCI. Experimentální určení polohy a rozměrů elipsoidu setrvačnosti hnacího agregátu
 TECHNCKÁ UNVERZTA V LBERC FAKULTA STROJNÍ Katedra vozidel a motorů Experimentální určení polohy a rozměrů elipsoidu setrvačnosti hnacího agregátu Autoreferát disertační práce Studijní program: Studijní
TECHNCKÁ UNVERZTA V LBERC FAKULTA STROJNÍ Katedra vozidel a motorů Experimentální určení polohy a rozměrů elipsoidu setrvačnosti hnacího agregátu Autoreferát disertační práce Studijní program: Studijní
Základy tvorby výpočtového modelu
 Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Teorie bezkontaktního měření rozměrů
 Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Pevnostní analýza plastového držáku
 Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
1. Změřte momenty setrvačnosti kvádru vzhledem k hlavním osám setrvačnosti.
 1 Pracovní úkoly 1. Změřte momenty setrvačnosti kvádru vzhledem k hlavním osám setrvačnosti.. Určete složky jednotkového vektoru ve směru zadané obecné osy rotace kvádru v souřadné soustavě dané hlavními
1 Pracovní úkoly 1. Změřte momenty setrvačnosti kvádru vzhledem k hlavním osám setrvačnosti.. Určete složky jednotkového vektoru ve směru zadané obecné osy rotace kvádru v souřadné soustavě dané hlavními
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Vizualizace dějů uvnitř spalovacího motoru
 Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
(3) Vypočítejte moment setrvačnosti kvádru vzhledem k zadané obecné ose rotace.
 Vypočítejte moment setrvačnosti kvádru vzhledem k zadané obecné ose rotace.") STUDUM OTÁčENÍ TUHÉHO TěLESA TEREZA ZÁBOJNÍKOVÁ 1. Pracovní úkol (1) Změřte momenty setrvačnosti kvádru vzhledem k hlavním osám setrvačnosti. (2) Určete složky jednotkového vektoru ve směru zadané obecné
STUDUM OTÁčENÍ TUHÉHO TěLESA TEREZA ZÁBOJNÍKOVÁ 1. Pracovní úkol (1) Změřte momenty setrvačnosti kvádru vzhledem k hlavním osám setrvačnosti. (2) Určete složky jednotkového vektoru ve směru zadané obecné
MOMENT SETRVAČNOSTI 2009 Tomáš BOROVIČKA B.11
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta biomedicínského inženýrství LABORATORNÍ PRÁCE MOMENT SETRVAČNOSTI 2009 Tomáš BOROVIČKA B.11 Obsah ZADÁNÍ... 4 TEORIE... 4 Metoda torzních kmitů... 4 Steinerova
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta biomedicínského inženýrství LABORATORNÍ PRÁCE MOMENT SETRVAČNOSTI 2009 Tomáš BOROVIČKA B.11 Obsah ZADÁNÍ... 4 TEORIE... 4 Metoda torzních kmitů... 4 Steinerova
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Měření momentu setrvačnosti
 Měření momentu setrvačnosti Úkol : 1. Zjistěte pro dané těleso moment setrvačnosti, prochází-li osa těžištěm. 2. Zjistěte moment setrvačnosti daného tělesa k dané ose metodou torzních kmitů. Pomůcky :
Měření momentu setrvačnosti Úkol : 1. Zjistěte pro dané těleso moment setrvačnosti, prochází-li osa těžištěm. 2. Zjistěte moment setrvačnosti daného tělesa k dané ose metodou torzních kmitů. Pomůcky :
3. Vypočítejte chybu, které se dopouštíte idealizací reálného kyvadla v rámci modelu kyvadla matematického.
 Pracovní úkoly. Změřte místní tíhové zrychlení g metodou reverzního kyvadla. 2. Změřte místní tíhové zrychlení g metodou matematického kyvadla. 3. Vypočítejte chybu, které se dopouštíte idealizací reálného
Pracovní úkoly. Změřte místní tíhové zrychlení g metodou reverzního kyvadla. 2. Změřte místní tíhové zrychlení g metodou matematického kyvadla. 3. Vypočítejte chybu, které se dopouštíte idealizací reálného
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Měření tíhového zrychlení matematickým a reverzním kyvadlem
 Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
1. Úvod do pružnosti a pevnosti
 1. Úvod do pružnosti a pevnosti Mechanika je nejstarší vědní obor a její nedílnou součástí je nauka o pružnosti a pevnosti. Pružností nazýváme schopnost pevných těles získat po odstranění vnějších účinků
1. Úvod do pružnosti a pevnosti Mechanika je nejstarší vědní obor a její nedílnou součástí je nauka o pružnosti a pevnosti. Pružností nazýváme schopnost pevných těles získat po odstranění vnějších účinků
III/2-1 Inovace a zkvalitnění výuky prostřednictvím ICT
 Název školy Název projektu Registrační číslo projektu Autor Střední průmyslová škola strojírenská a azyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Modernizace výuky CZ.1.07/1.5.00/34.1003
Název školy Název projektu Registrační číslo projektu Autor Střední průmyslová škola strojírenská a azyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Modernizace výuky CZ.1.07/1.5.00/34.1003
MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU
 Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
Snižování hlukové emise moderní automobilové převodovky. Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka
 Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
Laboratorní úloha č. 3 Spřažená kyvadla. Max Šauer
 Laboratorní úloha č. 3 Spřažená kyvadla Max Šauer 17. prosince 2003 Obsah 1 Úkol měření 2 2 Seznam použitých přístrojů a pomůcek 2 3 Výsledky měření 2 3.1 Stanovení tuhosti vazbové pružiny................
Laboratorní úloha č. 3 Spřažená kyvadla Max Šauer 17. prosince 2003 Obsah 1 Úkol měření 2 2 Seznam použitých přístrojů a pomůcek 2 3 Výsledky měření 2 3.1 Stanovení tuhosti vazbové pružiny................
3. Diskutujte výsledky měření z hlediska platnosti Biot-Savartova zákona.
 1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
1 Veličiny charakterizující geometrii ploch
 1 Veličiny charakterizující geometrii ploch Jedná se o veličiny charakterizující geometrii průřezu tělesa. Obrázek 1: Těleso v rovině. Těžiště plochy Souřadnice těžiště plochy, na které je hmota rovnoměrně
1 Veličiny charakterizující geometrii ploch Jedná se o veličiny charakterizující geometrii průřezu tělesa. Obrázek 1: Těleso v rovině. Těžiště plochy Souřadnice těžiště plochy, na které je hmota rovnoměrně
5. Pro jednu pružinu změřte závislost stupně vazby na vzdálenosti zavěšení pružiny od uložení
 1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
5. Statika poloha střediska sil
 5. Statika poloha střediska sil 5.1 Rovnoběžné sily a jejich střed Uvažujeme soustavu vzájemně rovnoběžných sil v prostoru s pevnými působišti. Každá síla má působiště dané polohovým vektorem. Všechny
5. Statika poloha střediska sil 5.1 Rovnoběžné sily a jejich střed Uvažujeme soustavu vzájemně rovnoběžných sil v prostoru s pevnými působišti. Každá síla má působiště dané polohovým vektorem. Všechny
Spalovací motor. Zpracoval: Pavel BRABEC. Pracoviště: KVM
 Zpracoval: Pavel BRABEC Pracoviště: KVM Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný projekt
Zpracoval: Pavel BRABEC Pracoviště: KVM Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný projekt
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
PRŮŘEZOVÉ CHARAKTERISTIKY
 . cvičení PRŮŘEZOVÉ CHRKTERISTIKY Poznámka Pojem průřezu zavádíme u prutových konstrukčních prvků. Průřez je rovinný obrazec, který vznikne myšleným řezem vedeným kolmo k podélné ose nedeformovaného prutu,
. cvičení PRŮŘEZOVÉ CHRKTERISTIKY Poznámka Pojem průřezu zavádíme u prutových konstrukčních prvků. Průřez je rovinný obrazec, který vznikne myšleným řezem vedeným kolmo k podélné ose nedeformovaného prutu,
1. Změřte modul pružnosti v tahu E oceli z protažení drátu. 2. Změřte modul pružnosti v tahu E oceli a duralu nebo mosazi z průhybu trámku.
 1 Pracovní úkoly 1. Změřte modul pružnosti v tahu E oceli z protažení drátu. 2. Změřte modul pružnosti v tahu E oceli a duralu nebo mosazi z průhybu trámku. 3. Výsledky měření graficky znázorněte, modul
1 Pracovní úkoly 1. Změřte modul pružnosti v tahu E oceli z protažení drátu. 2. Změřte modul pružnosti v tahu E oceli a duralu nebo mosazi z průhybu trámku. 3. Výsledky měření graficky znázorněte, modul
Analogově číslicové převodníky
 Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
Veličiny charakterizující geometrii ploch
 Veličiny charakterizující geometrii ploch Jedná se o veličiny charakterizující geometrii průřezu tělesa. Obrázek 1: Těleso v rovině. Těžiště plochy Souřadnice těžiště plochy, na které je hmota rovnoměrně
Veličiny charakterizující geometrii ploch Jedná se o veličiny charakterizující geometrii průřezu tělesa. Obrázek 1: Těleso v rovině. Těžiště plochy Souřadnice těžiště plochy, na které je hmota rovnoměrně
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
Cvičení 7 (Matematická teorie pružnosti)
") VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
3. Mechanická převodná ústrojí
 1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.3 Výzkum metod pro simulaci zatížení dílů převodů automobilů 3.3.1 Realizace modelu jízdy osobního vozidla a uložení hnacího agregátu
1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.3 Výzkum metod pro simulaci zatížení dílů převodů automobilů 3.3.1 Realizace modelu jízdy osobního vozidla a uložení hnacího agregátu
Dynamika vozidla Hnací a dynamická charakteristika vozidla
 Dynamika ozidla Hnací a dynamická charakteristika ozidla Zpracoal: Pael BRABEC Pracoiště: VM Tento materiál znikl jako součást projektu In-TECH, který je spoluinancoán Eropským sociálním ondem a státním
Dynamika ozidla Hnací a dynamická charakteristika ozidla Zpracoal: Pael BRABEC Pracoiště: VM Tento materiál znikl jako součást projektu In-TECH, který je spoluinancoán Eropským sociálním ondem a státním
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
PRAKTIKUM I. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne:
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. Úloha č. VII Název: Studium kmitů vázaných oscilátorů Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne: 27. 2. 2012 Odevzdal
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. Úloha č. VII Název: Studium kmitů vázaných oscilátorů Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne: 27. 2. 2012 Odevzdal
16. Matematický popis napjatosti
 p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
ZKUŠEBNÍ PROUD VZDUCHU V AERODYNAMICKÉM TUNELU 3M REVIZE 2011 ING. MIROSLAV GOLDA ING. MARTIN SOLICH ING. KATEŘINA JANDOVÁ
 ZKUŠEBNÍ PROUD VZDUCHU V AERODYNAMICKÉM TUNELU 3M REVIZE 2011 ING. MIROSLAV GOLDA ING. MARTIN SOLICH ING. KATEŘINA JANDOVÁ VÝZKUMNÝ A ZKUŠEBNÍ LETECKÝ ÚSTAV, a.s. BERANOVYCH 130, 199 05 PRAHA-LETŇANY 2011
ZKUŠEBNÍ PROUD VZDUCHU V AERODYNAMICKÉM TUNELU 3M REVIZE 2011 ING. MIROSLAV GOLDA ING. MARTIN SOLICH ING. KATEŘINA JANDOVÁ VÝZKUMNÝ A ZKUŠEBNÍ LETECKÝ ÚSTAV, a.s. BERANOVYCH 130, 199 05 PRAHA-LETŇANY 2011
OTÁZKY VSTUPNÍHO TESTU PP I LS 2010/2011
 OTÁZKY VSTUPNÍHO TESTU PP I LS 010/011 Pomocí Thumovy definice, s využitím vrubové citlivosti q je definován vztah mezi součiniteli vrubu a tvaru jako: Součinitel tvaru α je podle obrázku definován jako:
OTÁZKY VSTUPNÍHO TESTU PP I LS 010/011 Pomocí Thumovy definice, s využitím vrubové citlivosti q je definován vztah mezi součiniteli vrubu a tvaru jako: Součinitel tvaru α je podle obrázku definován jako:
Rapid tooling. Rapid tooling. Zpracoval: Přemysl Pokorný. Pracoviště: TUL- KVS
 Zpracoval: Přemysl Pokorný Pracoviště: TUL- KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný
Zpracoval: Přemysl Pokorný Pracoviště: TUL- KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný
Měření modulů pružnosti G a E z periody kmitů pružiny
 Měření modulů pružnosti G a E z periody kmitů pružiny Online: http://www.sclpx.eu/lab2r.php?exp=2 V tomto experimentu vycházíme z pojetí klasického pokusu s pružinovým oscilátorem. Z periody kmitů se obvykle
Měření modulů pružnosti G a E z periody kmitů pružiny Online: http://www.sclpx.eu/lab2r.php?exp=2 V tomto experimentu vycházíme z pojetí klasického pokusu s pružinovým oscilátorem. Z periody kmitů se obvykle
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
2. Fyzikální kyvadlo (2.2) nebo pro homogenní tělesa. kde r je vzdálenost elementu dm, resp. dv, od osy otáčení, ρ je hustota tělesa, dv je objem
 nebo pro homogenní tělesa. kde r je vzdálenost elementu dm, resp. dv, od osy otáčení, ρ je hustota tělesa, dv je objem") 30. Fyzikální kyvadlo 1. Klíčová slova Fyzikální kyvadlo, matematické kyvadlo, kmitavý pohyb, perioda, doba kyvu, tíhové zrychlení, redukovaná délka fyzikálního kyvadla, moment setrvačnosti tělesa, frekvence,
30. Fyzikální kyvadlo 1. Klíčová slova Fyzikální kyvadlo, matematické kyvadlo, kmitavý pohyb, perioda, doba kyvu, tíhové zrychlení, redukovaná délka fyzikálního kyvadla, moment setrvačnosti tělesa, frekvence,
Úvod do teorie měření. Eva Hejnová
 Úvod do teorie měření Eva Hejnová Literatura: Novák, R. Úvod do teorie měření. Ústí nad Labem: UJEP, 2003 Sprušil, B., Zieleniecová, P.: Úvod do teorie fyzikálních měření. Praha: SPN, 1985 Brož, J. a kol.
Úvod do teorie měření Eva Hejnová Literatura: Novák, R. Úvod do teorie měření. Ústí nad Labem: UJEP, 2003 Sprušil, B., Zieleniecová, P.: Úvod do teorie fyzikálních měření. Praha: SPN, 1985 Brož, J. a kol.
PRAKTIKUM I Mechanika a molekulová fyzika
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I Mechanika a molekulová fyzika Úloha č. XXI Název: Měření tíhového zrychlení Pracoval: Jiří Vackář stud. skup. 11 dne 10..
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I Mechanika a molekulová fyzika Úloha č. XXI Název: Měření tíhového zrychlení Pracoval: Jiří Vackář stud. skup. 11 dne 10..
Průmyslová střední škola Letohrad. Ing. Soňa Chládková. Sbírka příkladů. ze stavební mechaniky
 Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Témata pro zkoušky profilové části maturitní zkoušky. Strojírenství, varianta vzdělávání konstruování s podporou počítače
 Témata pro zkoušky profilové části maturitní zkoušky Strojírenství, varianta vzdělávání konstruování s podporou počítače 1. povinná zkouška Stavba a provoz strojů 1. Pružiny 2. Převody ozubenými koly 3.
Témata pro zkoušky profilové části maturitní zkoušky Strojírenství, varianta vzdělávání konstruování s podporou počítače 1. povinná zkouška Stavba a provoz strojů 1. Pružiny 2. Převody ozubenými koly 3.
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Steinerova věta a průřezové moduly. Znění a použití Steinerovy věty. Určeno pro druhý ročník strojírenství M/01. Vytvořeno červen 2013
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: Číslo: Anotace: Mechanika, pružnost pevnost Steinerova
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: Číslo: Anotace: Mechanika, pružnost pevnost Steinerova
Cvičení Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí (
 Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
ZAŘÍZENÍ PRO MĚŘENÍ VÝŠKOVÉ POLOHY TĚŽIŠTĚ VOZIDLA
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
Měření tíhového zrychlení reverzním kyvadlem
 43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
FYZIKA I. Pohyb setrvačníku. Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art.
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
Cvičení 1. Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti
 Cvičení 1 Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti Napjatost v bodě tělesa Napjatost (napěťový stav) v bodě tělesa je množinou obecných napětí ve všech řezech, které lze
Cvičení 1 Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti Napjatost v bodě tělesa Napjatost (napěťový stav) v bodě tělesa je množinou obecných napětí ve všech řezech, které lze
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Měření momentu setrvačnosti prstence dynamickou metodou
 Měření momentu setrvačnosti prstence dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=13 Tato úloha patří zejména svým teoretickým základem k nejobtížnějším. Pojem momentu setrvačnosti dělá
Měření momentu setrvačnosti prstence dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=13 Tato úloha patří zejména svým teoretickým základem k nejobtížnějším. Pojem momentu setrvačnosti dělá
Měření emisí spalovacích motorů a příprava přístrojů před měřením
 Měření emisí spalovacích motorů a příprava přístrojů před měřením Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Měření emisí spalovacích motorů a příprava přístrojů před měřením Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
pneumatiky a kola zavěšení kol odpružení řízení
 Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
1. Měření hodnoty Youngova modulu pružnosti ocelového drátu v tahu a kovové tyče v ohybu
 Měření modulu pružnosti Úkol : 1. Měření hodnoty Youngova modulu pružnosti ocelového drátu v tahu a kovové tyče v ohybu Pomůcky : - Měřící zařízení s indikátorovými hodinkami - Mikrometr - Svinovací metr
Měření modulu pružnosti Úkol : 1. Měření hodnoty Youngova modulu pružnosti ocelového drátu v tahu a kovové tyče v ohybu Pomůcky : - Měřící zařízení s indikátorovými hodinkami - Mikrometr - Svinovací metr
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ TĚŽIŠTĚ
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Vzdělávací obsah vyučovacího předmětu
 Vzdělávací obsah vyučovacího předmětu Matematika 7. ročník Zpracovala: Mgr. Michaela Krůtová Číslo a početní operace provádí početní operace v oboru celých a racionálních čísel zaokrouhluje, provádí odhady
Vzdělávací obsah vyučovacího předmětu Matematika 7. ročník Zpracovala: Mgr. Michaela Krůtová Číslo a početní operace provádí početní operace v oboru celých a racionálních čísel zaokrouhluje, provádí odhady
Mechanické kmitání - určení tíhového zrychlení kyvadlem
 I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
Czech Raildays 2010 MODIFIKACE OZUBENÍ
 MODIFIKACE OZUBENÍ Milan Doležal Martin Sychrovský - DŮVODY KE STANOVENÍ MODIFIKACÍ OZUBENÍ - VÝHODY MODIFIKACÍ - PROVEDENÍ MODIFIKACÍ OZUBENÍ - VÝPOČET MODIFIKACÍ OZUBENÍ - EXPERIMENTÁLNÍ OVĚŘOVÁNÍ PARAMETRŮ
MODIFIKACE OZUBENÍ Milan Doležal Martin Sychrovský - DŮVODY KE STANOVENÍ MODIFIKACÍ OZUBENÍ - VÝHODY MODIFIKACÍ - PROVEDENÍ MODIFIKACÍ OZUBENÍ - VÝPOČET MODIFIKACÍ OZUBENÍ - EXPERIMENTÁLNÍ OVĚŘOVÁNÍ PARAMETRŮ
Modelování blízkého pole soustavy dipólů
 1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
I Mechanika a molekulová fyzika
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I Mechanika a molekulová fyzika Úloha č.: XVII Název: Studium otáčení tuhého tělesa Pracoval: Pavel Brožek stud. skup. 12
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I Mechanika a molekulová fyzika Úloha č.: XVII Název: Studium otáčení tuhého tělesa Pracoval: Pavel Brožek stud. skup. 12
TUHÉ TĚLESO. Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník
 TUHÉ TĚLESO Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Tuhé těleso Tuhé těleso je ideální těleso, jehož objem ani tvar se účinkem libovolně velkých sil nemění. Pohyb tuhého tělesa: posuvný
TUHÉ TĚLESO Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Tuhé těleso Tuhé těleso je ideální těleso, jehož objem ani tvar se účinkem libovolně velkých sil nemění. Pohyb tuhého tělesa: posuvný
Stanovení hustoty pevných a kapalných látek
 55 Kapitola 9 Stanovení hustoty pevných a kapalných látek 9.1 Úvod Hustota látky ρ je hmotnost její objemové jednotky, definované vztahem: ρ = dm dv, kde dm = hmotnost objemového elementu dv. Pro homogenní
55 Kapitola 9 Stanovení hustoty pevných a kapalných látek 9.1 Úvod Hustota látky ρ je hmotnost její objemové jednotky, definované vztahem: ρ = dm dv, kde dm = hmotnost objemového elementu dv. Pro homogenní
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ Protokol měření. Kontrola a měření závitů
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Protokol měření Tolerování závitů Kontrola a měření závitů Řetězec norem, které se zabývají závity, zahrnuje
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Protokol měření Tolerování závitů Kontrola a měření závitů Řetězec norem, které se zabývají závity, zahrnuje
MĚŘ, POČÍTEJ A MĚŘ ZNOVU
 MĚŘ, POČÍTEJ A MĚŘ ZNOVU Václav Piskač Gymnázium tř.kpt.jaroše, Brno Abstrakt: Příspěvek ukazuje možnost, jak ve vyučovací hodině propojit fyzikální experiment a početní úlohu způsobem, který výrazně zvyšuje
MĚŘ, POČÍTEJ A MĚŘ ZNOVU Václav Piskač Gymnázium tř.kpt.jaroše, Brno Abstrakt: Příspěvek ukazuje možnost, jak ve vyučovací hodině propojit fyzikální experiment a početní úlohu způsobem, který výrazně zvyšuje
Stanovení kritických otáček vačkového hřídele Frotoru
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra mechaniky Stanovení ických otáček vačkového hřídele Frotoru Řešitel: oc. r. Ing. Jan upal Plzeň, březen 7 Úvod: Cílem předložené zprávy je
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra mechaniky Stanovení ických otáček vačkového hřídele Frotoru Řešitel: oc. r. Ing. Jan upal Plzeň, březen 7 Úvod: Cílem předložené zprávy je
Žák plní standard v průběhu primy a sekundy, učivo absolutní hodnota v kvartě.
 STANDARDY MATEMATIKA 2. stupeň ČÍSLO A PROMĚNNÁ 1. M-9-1-01 Žák provádí početní operace v oboru celých a racionálních čísel; užívá ve výpočtech druhou mocninu a odmocninu 1. žák provádí základní početní
STANDARDY MATEMATIKA 2. stupeň ČÍSLO A PROMĚNNÁ 1. M-9-1-01 Žák provádí početní operace v oboru celých a racionálních čísel; užívá ve výpočtech druhou mocninu a odmocninu 1. žák provádí základní početní
Nosné desky. 1. Kirchhoffova teorie ohybu tenkých desek (h/l < 1/10) 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)
 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)") Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
SERIOVÉ A PARALELNÍ ZAPOJENÍ PRUŽIN
 SERIOVÉ A PARALELNÍ ZAPOJENÍ PRUŽIN ANNA MOTYČKOVÁ 2015/2016, 8. Y Obsah Teoretický rozbor... 3 Zjištění tuhosti pružiny... 3 Sériové zapojení pružin... 3 Paralelní zapojení pružin... 3 Praktická část...
SERIOVÉ A PARALELNÍ ZAPOJENÍ PRUŽIN ANNA MOTYČKOVÁ 2015/2016, 8. Y Obsah Teoretický rozbor... 3 Zjištění tuhosti pružiny... 3 Sériové zapojení pružin... 3 Paralelní zapojení pružin... 3 Praktická část...
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření tlaku (podtlak, přetlak)
 na téma Tvorba grafické vizualizace principu měření tlaku (podtlak, přetlak)") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření tlaku (podtlak, přetlak) Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření tlaku (podtlak, přetlak) Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE. Úloha 5: Měření tíhového zrychlení
 ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE Datum měření: číslo skupiny: Spolupracovali: 1 Úvod 1.1 Pracovní úkoly [1] Úloha 5: Měření tíhového zrychlení Jméno: Ročník, kruh: Klasifikace: 1. V domácí
ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE Datum měření: číslo skupiny: Spolupracovali: 1 Úvod 1.1 Pracovní úkoly [1] Úloha 5: Měření tíhového zrychlení Jméno: Ročník, kruh: Klasifikace: 1. V domácí
Skládání různoběžných kmitů. Skládání kolmých kmitů. 1) harmonické kmity stejné frekvence :
 harmonické kmity stejné frekvence :") Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Klopením rozumíme ztrátu stability při ohybu, při které dojde k vybočení prutu z roviny jeho prvotního ohybu (viz obr.). Obr.
. Obr.") . cvičení Klopení nosníků Klopením rozumíme ztrátu stability při ohybu, při které dojde k vybočení prutu z roviny jeho prvotního ohybu (viz obr.). Obr. Ilustrace klopení Obr. Ohýbaný prut a tvar jeho ztráty
. cvičení Klopení nosníků Klopením rozumíme ztrátu stability při ohybu, při které dojde k vybočení prutu z roviny jeho prvotního ohybu (viz obr.). Obr. Ilustrace klopení Obr. Ohýbaný prut a tvar jeho ztráty
Experimentální hodnocení bezpečnosti mobilní fotbalové brány
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
Střední průmyslová škola strojírenská a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191
 Název školy Název projektu Registrační číslo projektu Autor Název šablony Střední průmyslová škola strojírenská a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Modernizace výuky
Název školy Název projektu Registrační číslo projektu Autor Název šablony Střední průmyslová škola strojírenská a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Modernizace výuky
Název: Studium kmitů na pružině
 Název: Studium kmitů na pružině Autor: Mgr. Lucia Klimková Název školy: Gymnázium Jana Nerudy, škola hl. města Prahy Předmět (mezipředmětové vztahy) : Fyzika (Matematika) Tematický celek: Mechanické kmitání
Název: Studium kmitů na pružině Autor: Mgr. Lucia Klimková Název školy: Gymnázium Jana Nerudy, škola hl. města Prahy Předmět (mezipředmětové vztahy) : Fyzika (Matematika) Tematický celek: Mechanické kmitání
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Souřadnicové měření je měření prostorových souřadnic prováděné pomocí CMM Souřadnicový měřicí stroj CMM je měřicí systém k měření prostorových souřadn
 Seminář z oboru GPS (Geometrické Specifikace Produktů) Současný stav v oblasti návaznosti souřadnicových měřicích strojů v systémech kvality Doc. Tykal Osnova: Úvod Zkoušení CMM: - typy zkoušek - podmínky
Seminář z oboru GPS (Geometrické Specifikace Produktů) Současný stav v oblasti návaznosti souřadnicových měřicích strojů v systémech kvality Doc. Tykal Osnova: Úvod Zkoušení CMM: - typy zkoušek - podmínky
b) Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm
 Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm") b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
Experimentální ověření možností stanovení příčné tuhosti flexi-coil pružin
 Jaromír Zelenka 1, Jakub Vágner 2, Aleš Hába 3, Experimentální ověření možností stanovení příčné tuhosti flexi-coil pružin Klíčová slova: vypružení, flexi-coil, příčná tuhost, MKP, šroubovitá pružina 1.
Jaromír Zelenka 1, Jakub Vágner 2, Aleš Hába 3, Experimentální ověření možností stanovení příčné tuhosti flexi-coil pružin Klíčová slova: vypružení, flexi-coil, příčná tuhost, MKP, šroubovitá pružina 1.
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Pohyb tělesa po nakloněné rovině
 Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
OBSAH. MODÁLNÍ VLASTNOSTI KLIKOVÉHO ÚSTROJÍ FSI VUT BRNO ČTYŘVÁLCOVÉHO TRAKTOROVÉHO MOTORU Ústav automobilního 1 VSTUPNÍ HODNOTY PRO VÝPOČET...
 OBSAH 1 VSTUPNÍ HODNOTY PRO VÝPOČET... 3 2 REDUKCE ROTAČNÍCH HMOT... 5 2.1 MOMENT SETRVAČNOSTI ROTAČNÍ HMOTY OJNICE... 5 2.2 MOMENT SETRVAČNOSTI JEDNOTLIVÝCH ZALOMENÍ... 5 3 REDUKCE POSUVNÝCH HMOT... 5
OBSAH 1 VSTUPNÍ HODNOTY PRO VÝPOČET... 3 2 REDUKCE ROTAČNÍCH HMOT... 5 2.1 MOMENT SETRVAČNOSTI ROTAČNÍ HMOTY OJNICE... 5 2.2 MOMENT SETRVAČNOSTI JEDNOTLIVÝCH ZALOMENÍ... 5 3 REDUKCE POSUVNÝCH HMOT... 5
( r ) 2. Měření mechanické hysterezní smyčky a modulu pružnosti ve smyku
 2. Měření mechanické hysterezní smyčky a modulu pružnosti ve smyku") ěření mechanické hysterezní smyčky a modulu pružnosti ve smyku 1 ěření mechanické hysterezní smyčky a modulu pružnosti ve smyku Úkol č.1: Získejte mechanickou hysterezní křivku pro dráty různé tloušťky
ěření mechanické hysterezní smyčky a modulu pružnosti ve smyku 1 ěření mechanické hysterezní smyčky a modulu pružnosti ve smyku Úkol č.1: Získejte mechanickou hysterezní křivku pro dráty různé tloušťky
Projekt: Obor DS. Prezentace projektů FD 2010 Aktivní bezpečnost dopravních prostředků projekt k616 Bc. Petr Valeš
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Ústav K616 Projekt: AKTIVNÍ BEZPEČNOST DOPRAVNÍCH PROSTŘEDKŮ Obor DS Bc. Petr VALEŠ mail: valespe1@fd.cvut.cz tel.: 724753860 Ústav dopravní techniky
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Ústav K616 Projekt: AKTIVNÍ BEZPEČNOST DOPRAVNÍCH PROSTŘEDKŮ Obor DS Bc. Petr VALEŠ mail: valespe1@fd.cvut.cz tel.: 724753860 Ústav dopravní techniky
Návrh a realizace úloh do Fyzikálního praktika z mechaniky a termiky
 Návrh a realizace úloh do Fyzikálního praktika z mechaniky a termiky DIPLOMOVÁ PRÁCE Studentka: Bc. Lenka Kadlecová Vedoucí práce: Ing. Helena Poláková, PhD. Aktuálnost zpracování tématu Původně Od 2014
Návrh a realizace úloh do Fyzikálního praktika z mechaniky a termiky DIPLOMOVÁ PRÁCE Studentka: Bc. Lenka Kadlecová Vedoucí práce: Ing. Helena Poláková, PhD. Aktuálnost zpracování tématu Původně Od 2014
Článek 286-2016 - ZVLÁŠTNÍ PŘEDPISY PRO VYLEPŠENÉ TERÉNNÍ VOZY (SKUPINA T3)
") Článek 286-2016 - ZVLÁŠTNÍ PŘEDPISY PRO VYLEPŠENÉ TERÉNNÍ VOZY (SKUPINA T3) Pozemní vozidla s jedním motorem s mechanickým pohonem na zemi, se 4 až 8 koly (pokud má vůz více než 4 kola, je třeba schválení
Článek 286-2016 - ZVLÁŠTNÍ PŘEDPISY PRO VYLEPŠENÉ TERÉNNÍ VOZY (SKUPINA T3) Pozemní vozidla s jedním motorem s mechanickým pohonem na zemi, se 4 až 8 koly (pokud má vůz více než 4 kola, je třeba schválení
Chyby nepřímých měření
 nepřímé měření: Chyby nepřímých měření chceme určit veličinu z hodnot jiných veličin na základě funkční vztahu máme změřené veličiny pomocí přímých měření (viz. dříve) včetně chyb: x±σ x, y±σ y,... známe
nepřímé měření: Chyby nepřímých měření chceme určit veličinu z hodnot jiných veličin na základě funkční vztahu máme změřené veličiny pomocí přímých měření (viz. dříve) včetně chyb: x±σ x, y±σ y,... známe
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Program dalšího vzdělávání
 Program dalšího vzdělávání VZDĚLÁVÁNÍ LEŠENÁŘŮ Učební plán kurzu: Vzdělávání odborně způsobilých osob pro DSK MODUL A2 Projekt: Konkurenceschopnost pro lešenáře Reg. č.: CZ.1.07/3.2.01/01.0024 Tento produkt
Program dalšího vzdělávání VZDĚLÁVÁNÍ LEŠENÁŘŮ Učební plán kurzu: Vzdělávání odborně způsobilých osob pro DSK MODUL A2 Projekt: Konkurenceschopnost pro lešenáře Reg. č.: CZ.1.07/3.2.01/01.0024 Tento produkt