Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
|
|
|
- Štefan Kašpar
- před 5 lety
- Počet zobrazení:
Transkript

1 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D.
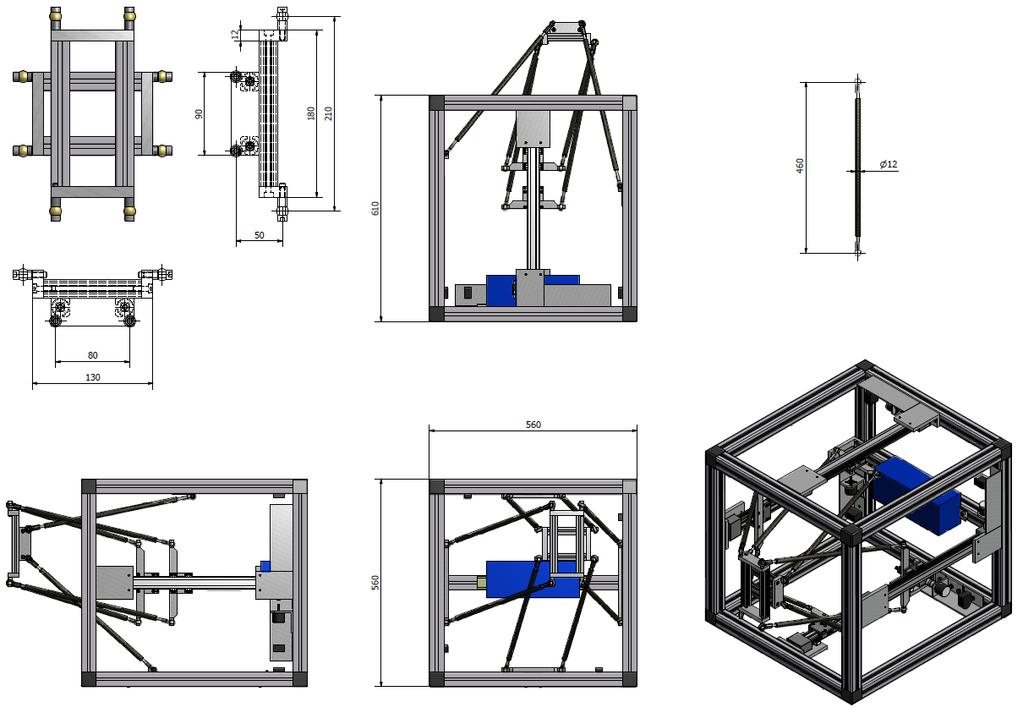
2 Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci s ohledem na kolize a dosažitelný prostor Navrhnout a realizovat úpravy laboratorního modelu
3 Úvod Mechanismy s paralelní kinematickou strukturou Historie mechanismů s PKS Současný stav problematiky Matematický model zvoleného mechanismu Optimalizace a úpravy laboratorního modelu Počítačová simulace zvoleného mechanismu Závěr


4 Většina výrobních strojů i manipulátorů má dnes sériovou kinematickou strukturu Nevýhody: Velká hmotnost jednotlivých členů Namáhání dílů ohybem Sčítání nepřesností podél řetězce Řešení: Zvyšování tuhosti Přesnější a lehčí díly Využití mechatroniky Nasazení strojů s paralelní kinematickou strukturou
5 Kinematický řetězec Uzavřený Složený Rám vodicí řetězce platforma

6 Hlavní výhody Pohony na základním rámu Převážně namáhání tahem/tlakem (vzpěr) Lepší dynamické vlastnosti Použití stejných dílů Hlavní nevýhody Špatný poměr pracovního a zástavbového prostoru Singulární polohy v pracovním prostoru Kolize jednotlivých dílů mechanismu Vysoké nároky na řízení Hybridní mechanismy Redundantní mechanismy


7 Gwinnett Stewart Cappel



8 Praktické problémy očekávání se nenaplnila Přesto vzniklo několik úspěšných koncepcí

9 Sliding Delta 3 DOF redundantní
10
11 Kinematika: Inverzní úloha pro polohy, rychlosti i zrychlení Maticová metoda Jacobiho matice Dynamika Zjednodušující předpoklady Lagrangeovy rovnice smíšeného typu Převod na popis pomocí nezávislých souřadnic Implementace v prostředí Matlab/Simulink
 Využití prostoru (bez kolizí) Optimalizační parametry: Délky spojnic Vzdálenost uchycení")
12 Původní model byl již optimalizován Nový model z něj vychází Očekáváme malé odchylky Optimalizační kritéria: Manipulovatelnost (dexterita) Využití prostoru (bez kolizí) Optimalizační parametry: Délky spojnic Vzdálenost uchycení spojnic na platformě
13 Pareto množina možných variant
14 Nelineární model LRST Převod na stavový popis (odchylkový tvar) Linearizace ve zvolené poloze Analýza lineárního modelu Návrh LQR Simulace stabilizace ve zvolené poloze Simulace sledování zadané trajektorie

15
16 Průběh stavů při stabilizaci


17 NAZEV
18 Postupně byly splněny všechny cíle BP Přehled mechanismů Matematický model Optimalizace Návrh a úpravy modelu Simulace Další postup Dokončení modelu Aplikace navrženého regulátoru Rozšíření řízení o redundantní pohon Rozšíření (upřesnění) matematického modelu Ladění regulátoru
19

20

21
22 Zahrnutí více parametrů a kritérií Sestavení cílové funkce Genetické algoritmy Globální metoda Gradientní metody Závisí na počátečním odhadu a váhových kritériích
23 Z aktuálních hodnot parametrů byly spočteny krajní meze pro souřadnice platformy V každém bodě, v němž probíhal výpočet, byly pomocí inverzní kinematiky dopočítány souřadnice pohonů Kontrola, zda se pohony nacházejí přípustných mezích


24 Tento rozměr vliv na velikost pracovního prostoru nemá, ovlivňuje ale jeho polohu Ovlivněna je tedy velikost zástavbového prostoru a s ním také míra jeho využití Vliv na kritérium není velký (přibližně do 2 %)
25 Stavový pozorovatel bude potřeba pro aplikaci navrženého regulátoru na laboratorní model Vstupem pro regulátor je odchylka stavů od požadované hodnoty Výstupem ze systému jsou polohy pohonů (IRC) Stavy systému tedy neměříme přímo, ale bude nutné je rekonstruovat
26 P (PI) regulátor je určen pro systémy typu SISO Náš mechanismus je systém typu MIMO Běžný přístup k návrhu parametrů tohoto druhu regulátoru nezaručuje stabilitu Musel by být navržen decentralizovaný regulátor Obtížná úloha, teorie se stále vyvíjí Proti návrhu LQR pracnější a méně efektivní

27 Bohužel zatím ještě ne Model není dokončen a chybí řídicí hardware, přesnost tedy nebylo možné ověřit K praktické realizaci by mělo dojít na začátku následujícího semestru
28
Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU. Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D.
 ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D. Obsah Úvod Úprava konstrukce stávajícího modelu Matematický popis modelu Odstranění problému kývání po ukončení pohybu
ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D. Obsah Úvod Úprava konstrukce stávajícího modelu Matematický popis modelu Odstranění problému kývání po ukončení pohybu
Obrábění robotem se zpětnovazební tuhostí
 Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere
 NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Klíčová slova: Paralelní robotické struktury, průmyslová robotika, prediktivní řízení, řízení v reálném času
 Automatizace ročník 52 číslo 5 strany 296-300 Draft version Paralelní robotické struktury a moderní metody jejich řízení Autor: Belda Květoslav (Ústav teorie informace a automatizace AV ČR, v.v.i., Praha)
Automatizace ročník 52 číslo 5 strany 296-300 Draft version Paralelní robotické struktury a moderní metody jejich řízení Autor: Belda Květoslav (Ústav teorie informace a automatizace AV ČR, v.v.i., Praha)
Numerické metody a programování. Lekce 7
 Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB D24FZS
 OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
20. května Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém. výstřelu zasáhnout bod na zemi v definované vzdálenosti.
 Ukázková semestrální práce z předmětu VSME Tomáš Kroupa 20. května 2014 Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém lučištníka, který má při pevně daném natažení luku jen
Ukázková semestrální práce z předmětu VSME Tomáš Kroupa 20. května 2014 Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém lučištníka, který má při pevně daném natažení luku jen
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Ivan Švarc. Radomil Matoušek. Miloš Šeda. Miluše Vítečková. c..~"f~ AKADEMICKÉ NAKlADATEL.STVf. Brno 20 I I
 Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Mechatronika a robotika jako vědní disciplína
 Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Směrové řízení vozidla. Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D.
 Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
NESTABILITY VYBRANÝCH SYSTÉMŮ. Úvod. Vzpěr prutu. Petr Frantík 1
 NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Vnitřní soutěž Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS )
") Vnitřní soutěž 2015 Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS-15-011) Příloha k závěrečné zprávě Autor: Martin Švejda, msvejda@kky.zcu.cz, (korespondenční autor) Arnold Jáger,
Vnitřní soutěž 2015 Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS-15-011) Příloha k závěrečné zprávě Autor: Martin Švejda, msvejda@kky.zcu.cz, (korespondenční autor) Arnold Jáger,
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
Témata oborových projektů a bakalářských prací 2016/2017
 Témata oborových projektů a bakalářských prací 2016/2017 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Bakalářská a diplomová práce související tématem s projektem základního
Témata oborových projektů a bakalářských prací 2016/2017 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Bakalářská a diplomová práce související tématem s projektem základního
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine
 MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine Bc. Petr Kříbala Vedoucí práce: Ing. Jiří Mrázek, Ph.D., Ing. František Starý Abstrakt
MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine Bc. Petr Kříbala Vedoucí práce: Ing. Jiří Mrázek, Ph.D., Ing. František Starý Abstrakt
CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL
 Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
BROB Základy robotiky. Ing. František Burian, Ph.D. Jan Macháček VUT ID: Martin Pavelka VUT ID:
 Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky v Brně
 Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
Lineární stabilita a teorie II. řádu
 Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Laboratorní model obráběcího stroje TRIJOINT
 Laboratorní model obráběcího stroje TRIJOINT Bc. Lukáš Řápek Vedoucí práce: Ing. Jan Zavřel, Ph.D. Abstrakt Podle skutečného obráběcího centra TRIJOINT 900H byl zkonstruován laboratorní model, který je
Laboratorní model obráběcího stroje TRIJOINT Bc. Lukáš Řápek Vedoucí práce: Ing. Jan Zavřel, Ph.D. Abstrakt Podle skutečného obráběcího centra TRIJOINT 900H byl zkonstruován laboratorní model, který je
2. Mechatronický výrobek 17
 Předmluva 1 Úvod 3 Ing. Gunnar Künzel 1. Úvod do mechatroniky 5 1.1 Vznik, vývoj a definice mechatroniky 5 1.2 Mechatronická soustava a její komponenty 9 1.3 Mechatronický systém a jeho struktura 11 1.4
Předmluva 1 Úvod 3 Ing. Gunnar Künzel 1. Úvod do mechatroniky 5 1.1 Vznik, vývoj a definice mechatroniky 5 1.2 Mechatronická soustava a její komponenty 9 1.3 Mechatronický systém a jeho struktura 11 1.4
Numerická matematika Písemky
 Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Otázky ke státní závěrečné zkoušce
 Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU
 SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
Použití matematického aparátu při řešení prostorových mechanismů. Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO
 Použití matematického aparátu při řešení prostorových mechanismů Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO Téma přednášky - Mechanismy Co je to mechanismus? oustava těles spojených
Použití matematického aparátu při řešení prostorových mechanismů Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO Téma přednášky - Mechanismy Co je to mechanismus? oustava těles spojených
HIERARCHICKÝ OPTIMÁLNÍ REGULÁTOR Branislav Rehák ČVUT FEL, katedra řídicí techniky
 HIERARCHICKÝ OPTIMÁLNÍ REGULÁTOR Branislav Rehák ČVUT FEL, katedra řídicí techniky Úvod Teorie dynamických optimalizačních úloh je již delší dobu dobře rozpracována. Přesto není v praxi příliš často využívána.
HIERARCHICKÝ OPTIMÁLNÍ REGULÁTOR Branislav Rehák ČVUT FEL, katedra řídicí techniky Úvod Teorie dynamických optimalizačních úloh je již delší dobu dobře rozpracována. Přesto není v praxi příliš často využívána.
ZÁKLADY ROBOTIKY Pohony a věci s tím související
 ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
Počítačová dynamika tekutin (CFD) Základní rovnice. - laminární tok -
 Základní rovnice. - laminární tok -") Počítačová dynamika tekutin (CFD) Základní rovnice - laminární tok - Základní pojmy 2 Tekutina nemá vlastní tvar působením nepatrných tečných sil se částice tekutiny snadno uvedou do pohybu (výjimka některé
Počítačová dynamika tekutin (CFD) Základní rovnice - laminární tok - Základní pojmy 2 Tekutina nemá vlastní tvar působením nepatrných tečných sil se částice tekutiny snadno uvedou do pohybu (výjimka některé
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
ZATÍŽENÍ KŘÍDLA - I. Rozdělení zatížení. Aerodynamické zatížení vztlakových ploch
 ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
4. Na obrázku je rozdělovací funkce (hustota pravděpodobnosti) náhodné veličiny X. Jakou hodnotu musí mít parametr k?
 náhodné veličiny X. Jakou hodnotu musí mít parametr k?") A 1. Stanovte pravděpodobnost, že náhodná veličina X nabyde hodnoty menší než 6: P( X 6). Veličina X má rozdělení se střední hodnotou 6 a směrodatnou odchylkou 5: N(6,5). a) 0 b) 1/3 c) ½ 2. Je možné,
A 1. Stanovte pravděpodobnost, že náhodná veličina X nabyde hodnoty menší než 6: P( X 6). Veličina X má rozdělení se střední hodnotou 6 a směrodatnou odchylkou 5: N(6,5). a) 0 b) 1/3 c) ½ 2. Je možné,
VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 8
 UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 8 Hana Charvátová, Dagmar Janáčová Zlín 2013 Tento studijní materiál vznikl za finanční podpory
UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 8 Hana Charvátová, Dagmar Janáčová Zlín 2013 Tento studijní materiál vznikl za finanční podpory
Návrh parametrů inertoru pro zlepšení vypružení vozidla
 Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
Modelování elektromechanického systému
 Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
4EK311 Operační výzkum. 1. Úvod do operačního výzkumu
 4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
Měření dat Filtrace dat, Kalmanův filtr
 Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
NÁVRH LQG ŘÍZENÍ PRO FYZIKÁLNÍ MODEL KULIČKY NA TYČI
 NÁVRH LQG ŘÍZENÍ PRO FYZIKÁLNÍ MODEL KULIČKY NA TYČI Petr Vojčinák, Martin Pieš, Radovan Hájovský Vysoká škola báňská Technická univerzita Ostrava Fakulta elektrotechniky a informatiky Katedra měřicí a
NÁVRH LQG ŘÍZENÍ PRO FYZIKÁLNÍ MODEL KULIČKY NA TYČI Petr Vojčinák, Martin Pieš, Radovan Hájovský Vysoká škola báňská Technická univerzita Ostrava Fakulta elektrotechniky a informatiky Katedra měřicí a
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu
 Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 9
 UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 9 Nestacionární vedení tepla v rovinné stěně Hana Charvátová, Dagmar Janáčová Zlín 2013 Tento
UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY VYBRANÉ STATĚ Z PROCESNÍHO INŢENÝRSTVÍ cvičení 9 Nestacionární vedení tepla v rovinné stěně Hana Charvátová, Dagmar Janáčová Zlín 2013 Tento
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Řízení tepelné soustavy pomocí PLC Siemens
 Řízení tepelné soustavy pomocí PLC Siemens Martin Kopal TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení tepelné soustavy pomocí PLC Siemens Martin Kopal TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
KONSTRUKCE MANIPULÁTORU S PKS PRO VELMI MALÉ SOUČÁSTI
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Centrum kompetence automobilového průmyslu Josefa Božka - Kolokvium Božek 2014, 6. 11. 2014 Roztoky -
 WP17: Agregáty s dělením toku výkonu pro vysoce účinné mechanismy CVT/IVT, hybridní vozy a vozidlové diferenciály Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze
WP17: Agregáty s dělením toku výkonu pro vysoce účinné mechanismy CVT/IVT, hybridní vozy a vozidlové diferenciály Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze
SPOLEHLIVOST KONSTRUKCÍ & TEORIE SPOLEHLIVOSTI část 5: Aproximační techniky
 SPOLEHLIVOST KONSTRUKCÍ & TEORIE SPOLEHLIVOSTI část 5: Aproximační techniky Drahomír Novák Jan Eliáš 2012 Spolehlivost konstrukcí, Drahomír Novák & Jan Eliáš 1 část 5 Aproximační techniky 2012 Spolehlivost
SPOLEHLIVOST KONSTRUKCÍ & TEORIE SPOLEHLIVOSTI část 5: Aproximační techniky Drahomír Novák Jan Eliáš 2012 Spolehlivost konstrukcí, Drahomír Novák & Jan Eliáš 1 část 5 Aproximační techniky 2012 Spolehlivost
České vysoké učení technické v Praze, Fakulta stavební. Projekt: Využití pokročilého modelování konstrukcí v magisterském studiu
 České vysoké učení technické v Praze, Fakulta stavební Rozvojové projekty Ministerstva školství, mládeže a tělovýchovy ČR Rozvojové projekty mladých týmů RPMT 2014 Projekt: Využití pokročilého modelování
České vysoké učení technické v Praze, Fakulta stavební Rozvojové projekty Ministerstva školství, mládeže a tělovýchovy ČR Rozvojové projekty mladých týmů RPMT 2014 Projekt: Využití pokročilého modelování
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
Vytyčení polohy bodu polární metodou
 Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
Numerická matematika. Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou
 Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Dynamika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
OSA. maximalizace minimalizace 1/22
 OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
Cvičení MI-PRC I. Šimeček
 Cvičení MI-PRC I. Šimeček xsimecek@fit.cvut.cz Katedra počítačových systémů FIT České vysoké učení technické v Praze Ivan Šimeček, 2011 MI-PRC, LS2010/11, Cv.1-6 Příprava studijního programu Informatika
Cvičení MI-PRC I. Šimeček xsimecek@fit.cvut.cz Katedra počítačových systémů FIT České vysoké učení technické v Praze Ivan Šimeček, 2011 MI-PRC, LS2010/11, Cv.1-6 Příprava studijního programu Informatika
Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního a experimentálního modelová
 Robert Grepl MODELOVÁNÍ MECHATRONICKÝCH SYSTÉMÙ V MATLAB SIMMECHANICS Praha 2007 Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního
Robert Grepl MODELOVÁNÍ MECHATRONICKÝCH SYSTÉMÙ V MATLAB SIMMECHANICS Praha 2007 Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů.
 Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Modelování a simulace
 Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
 MODELOVÁNÍ A ŘÍZENÍ INVERZNÍHO KYVADLA Michalík Michal Katedra elektromechaniky a výkonové elektroniky, Západočeská univerzita v Plzni Abstrakt Tento příspěvek se zabývá rovinnou úlohou simultánního balancování
MODELOVÁNÍ A ŘÍZENÍ INVERZNÍHO KYVADLA Michalík Michal Katedra elektromechaniky a výkonové elektroniky, Západočeská univerzita v Plzni Abstrakt Tento příspěvek se zabývá rovinnou úlohou simultánního balancování
26 Nelineární systémy a řízení
 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
Inkrementální teorie plasticity - shrnutí
 Inkrementální teorie plasticity - shrnutí Aditivní zákon = e p. Hookeův zákon pro elastickou složku deformace =C: e. Podmínka plasticity f = f Y =0. Pravidlo zpevnění p e d =g, p,,d, d p,..., dy =h, p,y,
Inkrementální teorie plasticity - shrnutí Aditivní zákon = e p. Hookeův zákon pro elastickou složku deformace =C: e. Podmínka plasticity f = f Y =0. Pravidlo zpevnění p e d =g, p,,d, d p,..., dy =h, p,y,
Teorie tkaní. Modely vazného bodu. M. Bílek
 Teorie tkaní Modely vazného bodu M. Bílek 2016 Základní strukturální jednotkou tkaniny je vazný bod, tj. oblast v okolí jednoho zakřížení osnovní a útkové nitě. Proces tkaní tedy spočívá v tvorbě vazných
Teorie tkaní Modely vazného bodu M. Bílek 2016 Základní strukturální jednotkou tkaniny je vazný bod, tj. oblast v okolí jednoho zakřížení osnovní a útkové nitě. Proces tkaní tedy spočívá v tvorbě vazných
Kinematika robotických systémů
 Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE
 VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině.
 a silové působení v tekutině.") Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Display Technology for your Industry
 O nás Display Technology for your Industry Zobrazovací technologie pro Váš průmysl SemsoTec Group vytvoří ve Vaší společnosti kompletní výrobní řetězce pro Infotainment-Displeje a řídící jednotky od prototypů
O nás Display Technology for your Industry Zobrazovací technologie pro Váš průmysl SemsoTec Group vytvoří ve Vaší společnosti kompletní výrobní řetězce pro Infotainment-Displeje a řídící jednotky od prototypů
Státnicová otázka 6, okruh 1
 Státnicová otázka 6, okruh 1 Vojtěch Franc, xfrancv@electra.felk.cvut.cz 7. února 2000 1 Zadání Statické optimalizace. Lineární a nelineární programování. Optimální řízení a rozhodování v dynamických systémech,
Státnicová otázka 6, okruh 1 Vojtěch Franc, xfrancv@electra.felk.cvut.cz 7. února 2000 1 Zadání Statické optimalizace. Lineární a nelineární programování. Optimální řízení a rozhodování v dynamických systémech,
Odhad stavu matematického modelu křižovatek
 Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Princip gradientních optimalizačních metod
 Princip gradientních optimalizačních metod Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Úkol a základní
Princip gradientních optimalizačních metod Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Úkol a základní
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky DIPLOMOVÁ PRÁCE MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ Autor: Jiří Plecháček Vedoucí diplomové
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky DIPLOMOVÁ PRÁCE MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ Autor: Jiří Plecháček Vedoucí diplomové
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.