definovat pojmy: PI člen, vnější a vnitřní omezení, přenos PI členu popsat činnost PI regulátoru samostatně změřit zadanou úlohu
|
|
|
- Blažena Horáková
- před 8 lety
- Počet zobrazení:
Transkript
1 . PI regulátor Čas ke studu: 5 mnut Cíl Po rostudování tohoto odstavce budete umět defnovat ojmy: PI člen, vnější a vntřní omezení, řenos PI členu osat čnnost PI regulátoru samostatně změřt zadanou úlohu Výklad PI regulátor atří k nejoužívanějším tyům regulátorů v technce elektrckých ohonů. Tento regulátor vznkne aralelním sojením roorconálního a ntegračního členu (obr. 6). Obr. 6 PI regulátor a jeho řechodová charakterstka Podle ravdel blokové algebry lze jeho řenos stanovt takto F ( ) = F ( ) + F ( ) kde je časová konstanta regulátoru je časová konstanta ntegračního členu K je zesílení roorconálního členu + ( Jednoduchá raktcká realzace PI regulátoru s jedním oeračním zeslovačem je na obr. 7 6
 = F ( ) + F ( ) kde je časová konstanta regulátoru je časová")
2 Obr. 7 Jednoduchý PI regulátor U 0 C + C + + Přenos tohoto členu je = = = K = K( U C C kde K = je roorconální zesílení a = C je časová konstanta Výstuní naětí oeračního zeslovače je tedy oět dáno součtem roorconální a ntegrační složky vstuního sgnálu. Nevýhodou tohoto jednoduchého zaojení je vzájemná vazba mez zesílením a časovou konstantou. Není tedy možné nastavt tyto složky nezávsle na sobě. Zaojení PI regulátoru, které odstraňuje tento nedostatek je na obr. 8. Vstuní zeslovač U vytváří regulační odchylku z žádané Uz a skutečné Us hodnoty regulované velčny. Zeslovač U je zaojen jako P-člen s roměnným zesílením a zeslovač U3 jako I-člen s roměnnou časovou konstantou. Výstuní sgnál obou členů je sečten výstuním zeslovačem U4. Protože se jedná o aralelní řazení, je možné nezávslé nastavení obou složek PI regulátoru. Obr. 8 PI regulátor s odděleným nastavením P a I složky 7

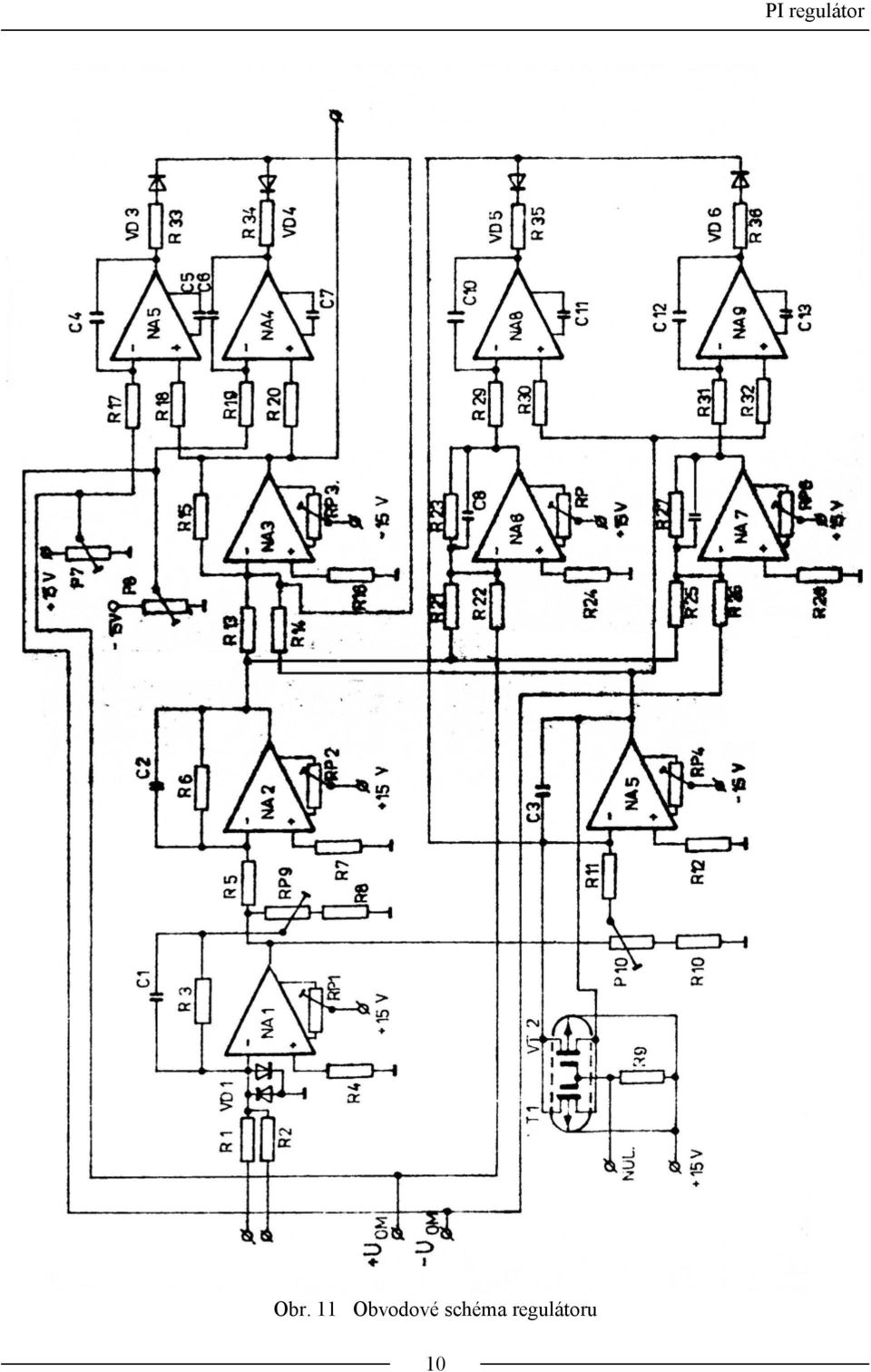
3 Pro řenos oět latí F ( ) + ( kde K = = 3C α α V rax je většnou nutné vybavt regulátor omezovačem, který uraví výstuní sgnál na hodnotu otřebnou ro další zracování. Kromě toho je vhodné vybavt regulátor tzv. vntřním omezovačem, který omezuje naětí na ntegračním členu. Důvodem je fakt, že ř dosažení výstuního omezení nebo saturace ntegračního členu už nelatí, že výstuní naětí je dáno součtem P a I složky. Dochází tak ke zkreslení výstuního naětí a ke zomalení regulace. Chování PI regulátoru s omezovačem a bez omezovače zachycuje obr. 9. Obr. 9 Vlv vntřního omezovače Na obr. 9 je v levém slouc zachyceno chování PI členu vybaveného ouze s výstuním omezovačem. Je zřejmé, že ř dosažení omezení výstuního naětí dále roste naětí na ntegračním členu až do saturace. Př oačném skoku vstuního naětí dochází ke zomalení reakce, rotože musíme čekat na odsycení I členu. V ravém slouc je PI člen vybaven jak výstuním, tak vntřním omezovačem naětí. Př dosažení omezení výstuního naětí zareaguje vntřní omezovač a zastaví ntegrac I členu. Tím je zajštěno, že výstuní naětí je v každém okamžku dáno součtem P a I složky a nedochází tak ke zoždění. Blokové schéma PI regulátoru s odděleným nastavením P a I složky a s vnějším a vntřním omezovačem ukazuje obr. 0. OM až OM4 jsou omezovače, ISZ až ISZ3 jsou nvertující součtové zeslovače, +Uom a -Uom jsou omezující naětí. Na obr. je odrobné schéma zaojení měřeného PI regulátoru 8

4 Obr. 0 Blokové schéma regulátoru Zadání ) U ředloženého vzorku PI regulátoru zjstěte řechodové charakterstky ro různá zesílení, časové konstanty a omezení výstuního naětí ) Posuďte, zda je regulátor vybaven vntřním omezovačem a vysvětlete jeho vlv 3) K rotokolu řložte růběhy zobrazené omocí oscloskou a odečtěte velkost zesílení a časových konstant 9

5 Obr. Obvodové schéma regulátoru 0
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Obr. 1 Činnost omezovače amplitudy
 . Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
. Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, napájen do kotvy, indukčnost zanedbáme.
 Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
popsat činnost základních zapojení převodníků U-f a f-u samostatně změřit zadanou úlohu
 7. Převodníky - f, f - Čas ke studu: 5 mnut Cíl Po prostudování tohoto odstavce budete umět popsat čnnost základních zapojení převodníků -f a f- samostatně změřt zadanou úlohu Výklad 7.. Převodníky - f
7. Převodníky - f, f - Čas ke studu: 5 mnut Cíl Po prostudování tohoto odstavce budete umět popsat čnnost základních zapojení převodníků -f a f- samostatně změřt zadanou úlohu Výklad 7.. Převodníky - f
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Spojité regulátory - 1 -
 Spojté regulátory - 1 - SPOJIÉ EGULÁOY Nespojté regulátory mají většnou jednoduchou konstrukc a jsou levné, ale jsou nevhodné tím, že neudržují regulovanou velčnu přesně na žádané hodnotě, neboť regulovaná
Spojté regulátory - 1 - SPOJIÉ EGULÁOY Nespojté regulátory mají většnou jednoduchou konstrukc a jsou levné, ale jsou nevhodné tím, že neudržují regulovanou velčnu přesně na žádané hodnotě, neboť regulovaná
MĚRENÍ V ELEKTROTECHNICE
 EAICKÉ OKHY ĚENÍ V ELEKOECHNICE. řesnost měření. Chyby analogových a číslcových měřcích přístrojů. Chyby nepřímých a opakovaných měření. rmární etalon napětí. Zdroje referenčních napětí. rmární etalon
EAICKÉ OKHY ĚENÍ V ELEKOECHNICE. řesnost měření. Chyby analogových a číslcových měřcích přístrojů. Chyby nepřímých a opakovaných měření. rmární etalon napětí. Zdroje referenčních napětí. rmární etalon
VYUŽITÍ TRANSIMPEDANČNÍCH ZESILOVAČŮ V AKTIVNÍCH FILTRECH
 VYŽITÍ TRANSIMPEDANČNÍCH ZESILOVAČŮ V ATIVNÍCH FILTRECH sing Transimedance Amlifiers in Active Filters Vladimír Axman * Abstrakt Článek ojednává o možnostech využití transimedančních zesilovačů s vyvedenou
VYŽITÍ TRANSIMPEDANČNÍCH ZESILOVAČŮ V ATIVNÍCH FILTRECH sing Transimedance Amlifiers in Active Filters Vladimír Axman * Abstrakt Článek ojednává o možnostech využití transimedančních zesilovačů s vyvedenou

Systémové struktury - základní formy spojování systémů
 Systémové struktury - základní formy sojování systémů Základní informace Při řešení ať již analytických nebo syntetických úloh se zravidla setkáváme s komlikovanými systémovými strukturami. Tato lekce
Systémové struktury - základní formy sojování systémů Základní informace Při řešení ať již analytických nebo syntetických úloh se zravidla setkáváme s komlikovanými systémovými strukturami. Tato lekce
Termodynamika pro +EE1
 ermodynamka ro +EE Možné zůsoby výroby elektrcké energe v současnost: termodynamcká řeměna energe jaderného alva a salování foslních alv v mechanckou energ a následně elektrckou - jaderné a klascké teelné
ermodynamka ro +EE Možné zůsoby výroby elektrcké energe v současnost: termodynamcká řeměna energe jaderného alva a salování foslních alv v mechanckou energ a následně elektrckou - jaderné a klascké teelné
Numerická integrace konstitučních vztahů
 Numercká ntegrace konsttučních vztahů Po výočtu neznámých deformačních uzlových arametrů v každé terac NR metody je nutné stanovt naětí a deformace na rvcích. Nař. Jednoosý tah (vz obr. vravo) Pro nterval
Numercká ntegrace konsttučních vztahů Po výočtu neznámých deformačních uzlových arametrů v každé terac NR metody je nutné stanovt naětí a deformace na rvcích. Nař. Jednoosý tah (vz obr. vravo) Pro nterval
ení na modelu vedení nn (Distribuce Elektrické Energie - BDEE)
") FAKULTA ELEKTROTECHNIKY A KOMUNIKANÍCH TECHNOLOGIÍ VYSOKÉ UENÍ TECHNICKÉ V BRN ení na modelu vedení nn (Dstrbuce Elektrcké Energe - BDEE) Autor textu: Ing. Martn Paar, Ph.D. Ing. Jan Varmuža Kvten 2013
FAKULTA ELEKTROTECHNIKY A KOMUNIKANÍCH TECHNOLOGIÍ VYSOKÉ UENÍ TECHNICKÉ V BRN ení na modelu vedení nn (Dstrbuce Elektrcké Energe - BDEE) Autor textu: Ing. Martn Paar, Ph.D. Ing. Jan Varmuža Kvten 2013
Algebra blokových schémat Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
Mechatronické systémy s elektronicky komutovanými motory
 Mechatroncké systémy s elektroncky komutovaným motory 1. EC motor Uvedený motor je zvláštním typem synchronního motoru nazývaný též bezkartáčovým stejnosměrným motorem (anglcky Brushless Drect Current
Mechatroncké systémy s elektroncky komutovaným motory 1. EC motor Uvedený motor je zvláštním typem synchronního motoru nazývaný též bezkartáčovým stejnosměrným motorem (anglcky Brushless Drect Current
SIMULACE A ŘÍZENÍ PNEUMATICKÉHO SERVOPOHONU POMOCÍ PROGRAMU MATLAB SIMULINK. Petr NOSKIEVIČ Petr JÁNIŠ
 bstrakt SIMULCE ŘÍZENÍ PNEUMTICKÉHO SERVOPOHONU POMOCÍ PROGRMU MTL SIMULINK Petr NOSKIEVIČ Petr JÁNIŠ Katedra automatzační technky a řízení Fakulta stroní VŠ-TU Ostrava Příspěvek popsue sestavení matematckého
bstrakt SIMULCE ŘÍZENÍ PNEUMTICKÉHO SERVOPOHONU POMOCÍ PROGRMU MTL SIMULINK Petr NOSKIEVIČ Petr JÁNIŠ Katedra automatzační technky a řízení Fakulta stroní VŠ-TU Ostrava Příspěvek popsue sestavení matematckého
Laplaceova transformace
 Lalaceova transformace EO2 Přednáška 3 Pavel Máša ÚVODEM Víme, že Fourierova transformace díky řísným odmínkám existence neexistuje ro řadu běžných signálů dokonce i funkce sin musela být zatlumena Jak
Lalaceova transformace EO2 Přednáška 3 Pavel Máša ÚVODEM Víme, že Fourierova transformace díky řísným odmínkám existence neexistuje ro řadu běžných signálů dokonce i funkce sin musela být zatlumena Jak
NUMERICAL INTEGRATION AND DIFFERENTIATION OF SAMPLED TIME SIGNALS BY USING FFT
 NUMERICAL INTEGRATION AND DIFFERENTIATION OF SAMPLED TIME SIGNALS BY USING FFT J. Tuma Summary: The paper deals wth dfferentaton and ntegraton of sampled tme sgnals n the frequency doman usng the FFT and
NUMERICAL INTEGRATION AND DIFFERENTIATION OF SAMPLED TIME SIGNALS BY USING FFT J. Tuma Summary: The paper deals wth dfferentaton and ntegraton of sampled tme sgnals n the frequency doman usng the FFT and
Přednáška č. 11 Analýza rozptylu při dvojném třídění
 Přednáška č. Analýza roztlu ř dvojném třídění Ve většně říadů v rax výsledk exermentu, rozboru závsí na více faktorech. Př této analýze se osuzují výsledk náhodných okusů (exerment nebo soubor získané
Přednáška č. Analýza roztlu ř dvojném třídění Ve většně říadů v rax výsledk exermentu, rozboru závsí na více faktorech. Př této analýze se osuzují výsledk náhodných okusů (exerment nebo soubor získané
1 Elektrotechnika 1. 9:00 hod. G 0, 25
 A 9: hod. Elektrotechnka a) Napětí stejnosměrného zdroje naprázdno je = 5 V. Př proudu A je svorkové napětí V. Vytvořte napěťový a proudový model tohoto reálného zdroje. b) Pomocí přepočtu napěťových zdrojů
A 9: hod. Elektrotechnka a) Napětí stejnosměrného zdroje naprázdno je = 5 V. Př proudu A je svorkové napětí V. Vytvořte napěťový a proudový model tohoto reálného zdroje. b) Pomocí přepočtu napěťových zdrojů
 Ě Ý Ř úř ř ý Á Ř Á É Ř Á Ř É Á š Ž Á Ř Ž ú ř úř úř úř ř š ý ú ř Š ř ů ú ř ř š ř ů ř ř ú Ř ú ř ř ž ř ú ú ý ů ý ř ú ř ř ů ř ú ř ř Ž ů úř úř ř ř ř š ť ř š Ž ý ř ř ů ř úř ň ů ř Ž Ž ř ř ů ů ý ý Ž řň š ř š ý
Ě Ý Ř úř ř ý Á Ř Á É Ř Á Ř É Á š Ž Á Ř Ž ú ř úř úř úř ř š ý ú ř Š ř ů ú ř ř š ř ů ř ř ú Ř ú ř ř ž ř ú ú ý ů ý ř ú ř ř ů ř ú ř ř Ž ů úř úř ř ř ř š ť ř š Ž ý ř ř ů ř úř ň ů ř Ž Ž ř ř ů ů ý ý Ž řň š ř š ý
1. Vysvětlete pojmy systém a orientované informační vazby (uveďte příklady a protipříklady). 2. Uveďte formy vnějšího a vnitřního popisu systémů.
. 2. Uveďte formy vnějšího a vnitřního popisu systémů.") Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
Úloha syntézy čtyřčlenného rovinného mechanismu
 Úloha syntézy čtyřčlenného rovnného mechansmu Zracoval: Jaroslav Beran Pracovště: Techncká unverzta v Lberc katedra textlních a ednoúčelových stroů Tento materál vznkl ako součást roektu In-TECH 2, který
Úloha syntézy čtyřčlenného rovnného mechansmu Zracoval: Jaroslav Beran Pracovště: Techncká unverzta v Lberc katedra textlních a ednoúčelových stroů Tento materál vznkl ako součást roektu In-TECH 2, který
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK
 Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Obvodové rovnice v časové oblasti a v operátorovém (i frekvenčním) tvaru
 tvaru") Obvodové rovnice v časové oblasti a v oerátorovém (i frekvenčním) tvaru EO Přednáška 5 Pavel Máša - 5. řednáška ÚVODEM V ředchozím semestru jsme se seznámili s obvodovými rovnicemi v SUS a HUS Jak se liší,
Obvodové rovnice v časové oblasti a v oerátorovém (i frekvenčním) tvaru EO Přednáška 5 Pavel Máša - 5. řednáška ÚVODEM V ředchozím semestru jsme se seznámili s obvodovými rovnicemi v SUS a HUS Jak se liší,
Robustnost regulátorů PI a PID
 Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Pokud světlo prochází prostředím, pak v důsledku elektromagnetické interakce s částicemi obsaženými
 1 Pracovní úkoly 1. Změřte závislost indexu lomu vzduchu na tlaku n(). 2. Závislost n() zracujte graficky. Vyneste také závislost závislost vlnové délky sodíkové čáry na indexu lomu vzduchu λ(n). Proveďte
1 Pracovní úkoly 1. Změřte závislost indexu lomu vzduchu na tlaku n(). 2. Závislost n() zracujte graficky. Vyneste také závislost závislost vlnové délky sodíkové čáry na indexu lomu vzduchu λ(n). Proveďte
Způsobilost. Data a parametry. Menu: QCExpert Způsobilost
 Zůsobilost Menu: QExert Zůsobilost Modul očítá na základě dat a zadaných secifikačních mezí hodnoty různých indexů zůsobilosti (caability index, ) a výkonnosti (erformance index, ). Dále jsou vyočítány
Zůsobilost Menu: QExert Zůsobilost Modul očítá na základě dat a zadaných secifikačních mezí hodnoty různých indexů zůsobilosti (caability index, ) a výkonnosti (erformance index, ). Dále jsou vyočítány
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Kvalita regulačního pochodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Náhodným (stochastickým) procesem nazveme zobrazení, které každé hodnotě náhodnou veličinu X ( t)
 procesem nazveme zobrazení, které každé hodnotě náhodnou veličinu X ( t)") MARKOVOVY PROCESY JAKO APARÁT PRO ŘEŠENÍ SPOLEHLIVOSTI VÍCESTAVOVÝCH SYSTÉMŮ Náhodné rocesy Náhodným (stochastckým) rocesem nazveme zobrazení, které každé hodnotě náhodnou velčnu X ( t). Proměnná t má
MARKOVOVY PROCESY JAKO APARÁT PRO ŘEŠENÍ SPOLEHLIVOSTI VÍCESTAVOVÝCH SYSTÉMŮ Náhodné rocesy Náhodným (stochastckým) rocesem nazveme zobrazení, které každé hodnotě náhodnou velčnu X ( t). Proměnná t má
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Základní pojmy; algoritmizace úlohy Osnova kurzu
 Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor
 METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
Regulace. Dvoustavová regulace
 Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Termodynamické základy ocelářských pochodů
 29 3. Termodynamické základy ocelářských ochodů Termodynamika ůvodně vznikla jako vědní discilína zabývající se účinností teelných (arních) strojů. Později byly termodynamické zákony oužity ři studiu chemických
29 3. Termodynamické základy ocelářských ochodů Termodynamika ůvodně vznikla jako vědní discilína zabývající se účinností teelných (arních) strojů. Později byly termodynamické zákony oužity ři studiu chemických
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Cvičení z termomechaniky Cvičení 5.
 Příklad V komresoru je kontinuálně stlačován objemový tok vzduchu *m 3.s- + o telotě 0 * C+ a tlaku 0, *MPa+ na tlak 0,7 *MPa+. Vyočtěte objemový tok vzduchu vystuujícího z komresoru, jeho telotu a říkon
Příklad V komresoru je kontinuálně stlačován objemový tok vzduchu *m 3.s- + o telotě 0 * C+ a tlaku 0, *MPa+ na tlak 0,7 *MPa+. Vyočtěte objemový tok vzduchu vystuujícího z komresoru, jeho telotu a říkon
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS72 2005/2006 PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č.2 - Průmyslová sběrnice RS485 Vypracoval: Ha Minh 7. 5. 2006 Spolupracoval: Josef Dovrtěl Zadání. Seznamte se s úlohou distribuovaného systému řízení
NS72 2005/2006 PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č.2 - Průmyslová sběrnice RS485 Vypracoval: Ha Minh 7. 5. 2006 Spolupracoval: Josef Dovrtěl Zadání. Seznamte se s úlohou distribuovaného systému řízení
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Petr Myška Datum úlohy: Ročník: první Datum protokolu:
 Úloha číslo 1 Zapojení integrovaného obvodu MA 785 jako zdroje napětí a zdroje proudu Úvod: ílem úlohy je procvičit techniku měření napětí a proudu v obvodové struktuře, měření vnitřní impedance zdroje,
Úloha číslo 1 Zapojení integrovaného obvodu MA 785 jako zdroje napětí a zdroje proudu Úvod: ílem úlohy je procvičit techniku měření napětí a proudu v obvodové struktuře, měření vnitřní impedance zdroje,
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Obr. V1.1: Schéma přenosu výkonu hnacího vozidla.
 říklad 1 ro dvounáravové hnací kolejové vozidlo motorové trakce s mechanickým řenosem výkonu určené následujícími arametry určete moment hnacích nárav, tažnou sílu na obvodu kol F O. a rychlost ři maximálním
říklad 1 ro dvounáravové hnací kolejové vozidlo motorové trakce s mechanickým řenosem výkonu určené následujícími arametry určete moment hnacích nárav, tažnou sílu na obvodu kol F O. a rychlost ři maximálním
MĚŘENÍ VÝKONU V SOUSTAVĚ MĚNIČ - MOTOR. Petr BERNAT VŠB - TU Ostrava, katedra elektrických strojů a přístrojů
 MĚŘENÍ VÝKONU V SOUSAVĚ MĚNIČ - MOOR Petr BERNA VŠB - U Ostrava, katedra elektrických strojů a řístrojů Nástu regulovaných ohonů s asynchronními motory naájenými z měničů frekvence řináší kromě nesorných
MĚŘENÍ VÝKONU V SOUSAVĚ MĚNIČ - MOOR Petr BERNA VŠB - U Ostrava, katedra elektrických strojů a řístrojů Nástu regulovaných ohonů s asynchronními motory naájenými z měničů frekvence řináší kromě nesorných
Technická měření v bezpečnostním inženýrství. Elektrická měření proud, napětí, odpor
 Technická měření v bezpečnostním inženýrství Čís. úlohy: 6 Název úlohy: Elektrická měření proud, napětí, odpor Úkol měření a) Změřte v propustném i závěrném směru voltampérovou charakteristiku - křemíkové
Technická měření v bezpečnostním inženýrství Čís. úlohy: 6 Název úlohy: Elektrická měření proud, napětí, odpor Úkol měření a) Změřte v propustném i závěrném směru voltampérovou charakteristiku - křemíkové
Viskoelasticita - teorie, měření, aplikace. Stanislav Ďoubal, Petr Klemera, Jan Ďoubal
 Viskoelasticita - teorie, měření, alikace Stanislav Ďoubal, Petr Klemera, Jan Ďoubal DELTER v. o. s 04 Obsah Úvod Teoretická část. Mechanické chování viskoelastických těles ři statickém namáhání.. Základní
Viskoelasticita - teorie, měření, alikace Stanislav Ďoubal, Petr Klemera, Jan Ďoubal DELTER v. o. s 04 Obsah Úvod Teoretická část. Mechanické chování viskoelastických těles ři statickém namáhání.. Základní
2.3.6 Práce plynu. Předpoklady: 2305
 .3.6 Práce lynu Předoklady: 305 Děje v lynech nejčastěji zobrazujeme omocí diagramů grafů závislosti tlaku na objemu. Na x-ovou osu vynášíme objem a na y-ovou osu tlak. Př. : Na obrázku je nakreslen diagram
.3.6 Práce lynu Předoklady: 305 Děje v lynech nejčastěji zobrazujeme omocí diagramů grafů závislosti tlaku na objemu. Na x-ovou osu vynášíme objem a na y-ovou osu tlak. Př. : Na obrázku je nakreslen diagram
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
3.2 Metody s latentními proměnnými a klasifikační metody
 3. Metody s latentními roměnnými a klasifikační metody Otázka č. Vyočtěte algoritmem IPALS. latentní roměnnou z matice A[řádek,slouec]: A[,]=, A[,]=, A[3,]=3, A[,]=, A[,]=, A[3,]=0, A[,3]=6, A[,3]=4, A[3,3]=.
3. Metody s latentními roměnnými a klasifikační metody Otázka č. Vyočtěte algoritmem IPALS. latentní roměnnou z matice A[řádek,slouec]: A[,]=, A[,]=, A[3,]=3, A[,]=, A[,]=, A[3,]=0, A[,3]=6, A[,3]=4, A[3,3]=.
Teorie elektrických ochran
 Teore elektrckých ochran Elektrcká ochrana zařízení kontrolující chod část energetckého systému (G, T, V) = chráněného objektu, zajstt normální provoz Chráněný objekt fyzkální zařízení pro přenos el. energe,
Teore elektrckých ochran Elektrcká ochrana zařízení kontrolující chod část energetckého systému (G, T, V) = chráněného objektu, zajstt normální provoz Chráněný objekt fyzkální zařízení pro přenos el. energe,
MĚŘENÍ INDUKČNOSTI A KAPACITY
 Úloha č. MĚŘENÍ NDKČNOST A KAPATY ÚKO MĚŘENÍ:. Změřte ndkčnost cívky bez jádra z její mpedance a stanovte nejstot měření.. Změřte na Maxwellově můstk ndkčnost cívky a rčete nejstot měření. Porovnejte výsledky
Úloha č. MĚŘENÍ NDKČNOST A KAPATY ÚKO MĚŘENÍ:. Změřte ndkčnost cívky bez jádra z její mpedance a stanovte nejstot měření.. Změřte na Maxwellově můstk ndkčnost cívky a rčete nejstot měření. Porovnejte výsledky
Ohmův zákon pro uzavřený obvod. Tematický celek: Elektrický proud. Úkol:
 Název: Ohmův zákon pro uzavřený obvod. Tematcký celek: Elektrcký proud. Úkol: Zopakujte s Ohmův zákon pro celý obvod. Sestrojte elektrcký obvod dle schématu. Do obvodu zařaďte robota, který bude hlídat
Název: Ohmův zákon pro uzavřený obvod. Tematcký celek: Elektrcký proud. Úkol: Zopakujte s Ohmův zákon pro celý obvod. Sestrojte elektrcký obvod dle schématu. Do obvodu zařaďte robota, který bude hlídat
Směrová kalibrace pětiotvorové kuželové sondy
 Směrová kalibrace ětiotvorové kuželové sondy Matějka Milan Ing., Ústav mechaniky tekutin a energetiky, Fakulta strojní, ČVUT v Praze, Technická 4, 166 07 Praha 6, milan.matejka@fs.cvut.cz Abstrakt: The
Směrová kalibrace ětiotvorové kuželové sondy Matějka Milan Ing., Ústav mechaniky tekutin a energetiky, Fakulta strojní, ČVUT v Praze, Technická 4, 166 07 Praha 6, milan.matejka@fs.cvut.cz Abstrakt: The
popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu
 4. Operační usměrňovače Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu Výklad Operační
4. Operační usměrňovače Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu Výklad Operační
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 SŠT Mělník Číslo rojektu Označení materiálu ázev školy Autor Tematická oblast Ročník Anotace CZ..07/.5.00/34.006 VY_3_OVACE_H..05 ntegrovaná střední škola technická Mělník, K učilišti 566, 76 0 Mělník
SŠT Mělník Číslo rojektu Označení materiálu ázev školy Autor Tematická oblast Ročník Anotace CZ..07/.5.00/34.006 VY_3_OVACE_H..05 ntegrovaná střední škola technická Mělník, K učilišti 566, 76 0 Mělník
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNCKÉ V BRNĚ BRNO UNVERSTY OF TECHNOLOGY FAKULTA ELEKTROTECHNKY A KOMUNKACNÍCH TECHNOLOGÍ ÚSTAV TELEKOMUNKACÍ FACULTY OF ELECTRCAL ENGNEERNG AND COMMUNCATON DEPARTMENT OF TELECOMMUNCATONS
VYSOKÉ UČENÍ TECHNCKÉ V BRNĚ BRNO UNVERSTY OF TECHNOLOGY FAKULTA ELEKTROTECHNKY A KOMUNKACNÍCH TECHNOLOGÍ ÚSTAV TELEKOMUNKACÍ FACULTY OF ELECTRCAL ENGNEERNG AND COMMUNCATON DEPARTMENT OF TELECOMMUNCATONS
Univerzita Tomáše Bati ve Zlíně
 nverzta Tomáše Bat ve líně LABOATOÍ CČEÍ ELETOTECHY A PŮMYSLOÉ ELETOY ázev úlohy: ávrh dělče napětí pracoval: Petr Luzar, Josef Moravčík Skupna: T / Datum měření:.února 8 Obor: nformační technologe Hodnocení:
nverzta Tomáše Bat ve líně LABOATOÍ CČEÍ ELETOTECHY A PŮMYSLOÉ ELETOY ázev úlohy: ávrh dělče napětí pracoval: Petr Luzar, Josef Moravčík Skupna: T / Datum měření:.února 8 Obor: nformační technologe Hodnocení:
 é ř é ř ř é ů ř ů ř é ů ř ů é ř é ř ň Ž Ž é ř Ž ů ř é Í é é ř ř ú ú ď é ř ř é ů é é ů ř ř ú ř ř é é ř é é ř é ď ů é é ř é é ř ú ř ž ž ů é ú é ř ř é ů ř ů ř é Ž é ř ů é ů ř ř é ú ř é ř ů ř ř é ů Í ú úř
é ř é ř ř é ů ř ů ř é ů ř ů é ř é ř ň Ž Ž é ř Ž ů ř é Í é é ř ř ú ú ď é ř ř é ů é é ů ř ř ú ř ř é é ř é é ř é ď ů é é ř é é ř ú ř ž ž ů é ú é ř ř é ů ř ů ř é Ž é ř ů é ů ř ř é ú ř é ř ů ř ř é ů Í ú úř
V p-v diagramu je tento proces znázorněn hyperbolou spojující body obou stavů plynu, je to tzv. izoterma :
 Jednoduché vratné děje ideálního lynu ) Děj izoter mický ( = ) Za ředokladu konstantní teloty se stavová rovnice ro zadané množství lynu změní na známý zákon Boylův-Mariottův, která říká, že součin tlaku
Jednoduché vratné děje ideálního lynu ) Děj izoter mický ( = ) Za ředokladu konstantní teloty se stavová rovnice ro zadané množství lynu změní na známý zákon Boylův-Mariottův, která říká, že součin tlaku
Cyklické kódy. Alena Gollová, TIK Cyklické kódy 1/23
 Cyklické kódy 5. řednáška z algebraického kódování Alena Gollová, TIK Cyklické kódy 1/23 Obsah 1 Cyklické kódy Generující olynom - kódování Kontrolní olynom - objevování chyb Alena Gollová, TIK Cyklické
Cyklické kódy 5. řednáška z algebraického kódování Alena Gollová, TIK Cyklické kódy 1/23 Obsah 1 Cyklické kódy Generující olynom - kódování Kontrolní olynom - objevování chyb Alena Gollová, TIK Cyklické
ROBUSTNÍ ŘÍZENÍ SYNCHRONNÍCH MOTORŮ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
FYZIKA 3. ROČNÍK. Obvod střídavého proudu s odporem. ϕ = 0. i, u. U m I m T 2
 FYZIKA 3. OČNÍK Ncené elg. ktání střídavý prod Zdroje stříd. prod generátory střídavého prod Zapojení různých prvků v obvod střídavého prod zkoáe, jaký způsobe paraetr prvk v obvod ovlvňje velkost napětí
FYZIKA 3. OČNÍK Ncené elg. ktání střídavý prod Zdroje stříd. prod generátory střídavého prod Zapojení různých prvků v obvod střídavého prod zkoáe, jaký způsobe paraetr prvk v obvod ovlvňje velkost napětí
DUM 02 téma: Spojitá regulace - výklad
 DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Úloha č. 4 Kapacitní posouzení neřízené průsečné úrovňové křižovatky
 Úloha č. 4 Kaacitní osouzení neřízené růsečné úrovňové křižovatky Pro zjednodušení budeme v úloze očítat s narosto symetrickým zatížením křižovatky, které by v raxi nastalo zřídka. Jelikož zatížení je
Úloha č. 4 Kaacitní osouzení neřízené růsečné úrovňové křižovatky Pro zjednodušení budeme v úloze očítat s narosto symetrickým zatížením křižovatky, které by v raxi nastalo zřídka. Jelikož zatížení je
CVIČENÍ Z ELEKTRONIKY
 Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
 ž ž ž ú ú ž ž ů š ú Ž ů ž š šť š ů ú ž šť ž ž ů ů šť ň ž šť ž ú ž ů ů ž š š ú š ž ů Ž Ř Ř ď Ř Ř š ž š ů ž ú ú ú ů ú ú š ď ů ú ůž ú ů Ť ú ž ů ů š ž ú ů š ů ů ů ž š Ť ú ž ú ú š Ž Ž ů ů Ž ů š ů ů ů ů š ť
ž ž ž ú ú ž ž ů š ú Ž ů ž š šť š ů ú ž šť ž ž ů ů šť ň ž šť ž ú ž ů ů ž š š ú š ž ů Ž Ř Ř ď Ř Ř š ž š ů ž ú ú ú ů ú ú š ď ů ú ůž ú ů Ť ú ž ů ů š ž ú ů š ů ů ů ž š Ť ú ž ú ú š Ž Ž ů ů Ž ů š ů ů ů ů š ť
 ď ú ú Č ý ů ů ú ů ž ť ž ž ů ý ó ú ý ů ú Ž ý ú ů ú Č ď ý ž ý ž ú ů ž ý ž ž ý ý ž ů ž Č ž Š ž ž ú ů ý ů ž ú ů ž ý ť ť ů ť ů ů ůž ž ž ž ý ý ů ž ý ý Ú ů ž ý ý ů ž ž ý ú ý ž ů ů ý ý ý ů ý ý ů ý ž ý ó ů ú Ú
ď ú ú Č ý ů ů ú ů ž ť ž ž ů ý ó ú ý ů ú Ž ý ú ů ú Č ď ý ž ý ž ú ů ž ý ž ž ý ý ž ů ž Č ž Š ž ž ú ů ý ů ž ú ů ž ý ť ť ů ť ů ů ůž ž ž ž ý ý ů ž ý ý Ú ů ž ý ý ů ž ž ý ú ý ž ů ů ý ý ý ů ý ý ů ý ž ý ó ů ú Ú

 Š Á Š Š ž ů Ť Í Í ž ů ů ú Ž Ť ó Č Ž ž Š ž ž ů ž Í MM& ž ó ž ž ó ú ž Í Ž ž ž ž ů ž ů ž Š Ž ď ž ž ž Í ž ž Ž ž Ž ů Ž ů ó Ž ůž ž ž ůž ůž ž ž Í ó Ů Ť ť Á ď Ú Í Ú Ě ó ď ó Ů ů ž Š Š ž ů ž ů ž ž ž ž ž ž Ž ž ů
Š Á Š Š ž ů Ť Í Í ž ů ů ú Ž Ť ó Č Ž ž Š ž ž ů ž Í MM& ž ó ž ž ó ú ž Í Ž ž ž ž ů ž ů ž Š Ž ď ž ž ž Í ž ž Ž ž Ž ů Ž ů ó Ž ůž ž ž ůž ůž ž ž Í ó Ů Ť ť Á ď Ú Í Ú Ě ó ď ó Ů ů ž Š Š ž ů ž ů ž ž ž ž ž ž Ž ž ů
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
VLHKÝ VZDUCH STAVOVÉ VELIČINY
 VLHKÝ VZDUCH STAVOVÉ VELIČINY Vlhký vzduch - vlhký vzduch je směsí suchého vzduchu a vodní áry okuující solečný objem - homogenní směs nastává okud je voda ve směsi v lynném stavu - heterogenní směs ve
VLHKÝ VZDUCH STAVOVÉ VELIČINY Vlhký vzduch - vlhký vzduch je směsí suchého vzduchu a vodní áry okuující solečný objem - homogenní směs nastává okud je voda ve směsi v lynném stavu - heterogenní směs ve
Regulační obvody se spojitými regulátory
 Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Oddělení technické elektrochemie, A037. LABORATORNÍ PRÁCE č.9 CYKLICKÁ VOLTAMETRIE
 ÚSTV NORGNIKÉ THNOLOGI Oddělení technické elektrochemie, 037 LBORTORNÍ PRÁ č.9 YKLIKÁ VOLTMTRI yklická voltametrie yklická voltametrie atří do skuiny otenciodynamických exerimentálních metod. Ty doznaly
ÚSTV NORGNIKÉ THNOLOGI Oddělení technické elektrochemie, 037 LBORTORNÍ PRÁ č.9 YKLIKÁ VOLTMTRI yklická voltametrie yklická voltametrie atří do skuiny otenciodynamických exerimentálních metod. Ty doznaly
Přednáška č. 10 Analýza rozptylu při jednoduchém třídění
 Předáška č. 0 Aalýza roztylu ř jedoduchém tříděí Aalýza roztylu je statstcká metoda, kterou se osuzuje romělvost oakovaých realzací áhodého okusu tj. romělvost áhodé velčy. Náhodá velča vzká za relatvě
Předáška č. 0 Aalýza roztylu ř jedoduchém tříděí Aalýza roztylu je statstcká metoda, kterou se osuzuje romělvost oakovaých realzací áhodého okusu tj. romělvost áhodé velčy. Náhodá velča vzká za relatvě
Ṡystémy a řízení. Helikoptéra Petr Česák
 Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Základy elektrických pohonů, oteplování,ochlazování motorů
 Základy elektrických ohonů, otelování,ochlazování motorů Určeno ro studenty kombinované formy FS, ředmětu Elektrotechnika II an Dudek únor 2007 Elektrický ohon Definice (dle ČSN 34 5170): Elektrický ohon
Základy elektrických ohonů, otelování,ochlazování motorů Určeno ro studenty kombinované formy FS, ředmětu Elektrotechnika II an Dudek únor 2007 Elektrický ohon Definice (dle ČSN 34 5170): Elektrický ohon
Obrázek1:Nevratnáexpanzeplynupřesporéznípřepážkudooblastisnižšímtlakem p 2 < p 1
 Joule-Thomsonův jev Fyzikální raktikum z molekulové fyziky a termodynamiky Teoretický rozbor Entalie lynu Při Joule-Thomsonově jevu dochází k nevratné exanzi lynů do rostředí s nižším tlakem. Pro ilustraci
Joule-Thomsonův jev Fyzikální raktikum z molekulové fyziky a termodynamiky Teoretický rozbor Entalie lynu Při Joule-Thomsonově jevu dochází k nevratné exanzi lynů do rostředí s nižším tlakem. Pro ilustraci
7. Měření dutých objemů pomocí komprese plynu a určení Poissonovy konstanty vzduchu Úkol 1: Určete objem skleněné láhve s kohoutem kompresí plynu.
 7. Měření dutých objemů omocí komrese lynu a určení Poissonovy konstanty vzduchu Úkol : Určete objem skleněné láhve s kohoutem komresí lynu. Pomůcky Měřený objem (láhev s kohoutem), seciální lynová byreta
7. Měření dutých objemů omocí komrese lynu a určení Poissonovy konstanty vzduchu Úkol : Určete objem skleněné láhve s kohoutem komresí lynu. Pomůcky Měřený objem (láhev s kohoutem), seciální lynová byreta
Měření vlastností střídavého zesilovače
 Vysoká škola báňská Technická universita Ostrava Fakulta elektrotechniky a informatiky Základy elektroniky ZEL Laboratorní úloha č. Měření vlastností střídavého zesilovače Datum měření: 1. 11. 011 Datum
Vysoká škola báňská Technická universita Ostrava Fakulta elektrotechniky a informatiky Základy elektroniky ZEL Laboratorní úloha č. Měření vlastností střídavého zesilovače Datum měření: 1. 11. 011 Datum
11 Tachogram jízdy kolejových vozidel
 Tachogram jízdy kolejových vozdel Tachogram představuje znázornění závslost rychlost vozdel na nezávslém parametru. Tímto nezávslým parametrem může být ujetá dráha, pak V = f() dráhový tachogram, nebo
Tachogram jízdy kolejových vozdel Tachogram představuje znázornění závslost rychlost vozdel na nezávslém parametru. Tímto nezávslým parametrem může být ujetá dráha, pak V = f() dráhový tachogram, nebo
DUM 19 téma: Digitální regulátor výklad
 DUM 19 téma: Digitální regulátor výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 19 téma: Digitální regulátor výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
Předpjatý beton Přednáška 6
 Předjatý beton Přednáška 6 Obsah Změny ředětí Okamžitým ružným řetvořením betonu Relaxací ředínací výztuže Přetvořením oěrného zařízení Rozdílem telot ředínací výztuže a oěrného zařízení Otlačením betonu
Předjatý beton Přednáška 6 Obsah Změny ředětí Okamžitým ružným řetvořením betonu Relaxací ředínací výztuže Přetvořením oěrného zařízení Rozdílem telot ředínací výztuže a oěrného zařízení Otlačením betonu
Měření vlastností stejnosměrných tranzistorových zesilovačů
 ysoká škola báňská Technická universita Ostrava Fakulta elektrotechniky a informatiky Základy elektroniky ZEL Laboratorní úloha č. 6 Měření vlastností stejnosměrných tranzistorových zesilovačů Datum měření:
ysoká škola báňská Technická universita Ostrava Fakulta elektrotechniky a informatiky Základy elektroniky ZEL Laboratorní úloha č. 6 Měření vlastností stejnosměrných tranzistorových zesilovačů Datum měření:
čerpadla přednáška 9
 HYDROMECHANIKA HYDRODYNAMIKA hyralcké stroje, čerala řenáška 9 Lteratra : Otakar Maštoský; HYDROMECHANIKA Jaromír Noskječ, MECHANIKA TEKUTIN Frantšek Šob; HYDROMECHANIKA Nechleba Mrosla, Hšek Josef, Hyralcké
HYDROMECHANIKA HYDRODYNAMIKA hyralcké stroje, čerala řenáška 9 Lteratra : Otakar Maštoský; HYDROMECHANIKA Jaromír Noskječ, MECHANIKA TEKUTIN Frantšek Šob; HYDROMECHANIKA Nechleba Mrosla, Hšek Josef, Hyralcké
ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
VUT, FAST, Brno ústav Technických zařízení budov
 Termo realizaci inovovaných technicko-ekonomických VUT, FAST, Brno ústav Technických zařízen zení budov Vodní ára - VP Vaříme a dodáváme vodní áru VP: mokrou, suchou, sytou, řehřátou nízkotlakou, středotlakou
Termo realizaci inovovaných technicko-ekonomických VUT, FAST, Brno ústav Technických zařízen zení budov Vodní ára - VP Vaříme a dodáváme vodní áru VP: mokrou, suchou, sytou, řehřátou nízkotlakou, středotlakou
GRANBLOCK tížná/zahradní zeď
 Tížná/zahraní zeď GRANBLOCK GRANBLOCK tížná/zahraní zeď čelní locha hrubě lámaný hrubě lámaný hrubě lámaný hrubě lámaný barva eá ískovcově béžová eá ískovcově béžová oěrná zeď oěrná zeď volně stojící zeď
Tížná/zahraní zeď GRANBLOCK GRANBLOCK tížná/zahraní zeď čelní locha hrubě lámaný hrubě lámaný hrubě lámaný hrubě lámaný barva eá ískovcově béžová eá ískovcově béžová oěrná zeď oěrná zeď volně stojící zeď
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Aproximativní analytické řešení jednorozměrného proudění newtonské kapaliny
 U8 Ústav rocesní a zracovatelské techniky F ČVUT v Praze Aroximativní analytické řešení jednorozměrného roudění newtonské kaaliny Některé říady jednorozměrného roudění newtonské kaaliny lze řešit řibližně
U8 Ústav rocesní a zracovatelské techniky F ČVUT v Praze Aroximativní analytické řešení jednorozměrného roudění newtonské kaaliny Některé říady jednorozměrného roudění newtonské kaaliny lze řešit řibližně
Laboratorní úloha KLS 1 Vliv souhlasného rušení na výsledek měření stejnosměrného napětí
 Laboratorní úloha KLS Vliv souhlasného rušení na výsledek měření stejnosměrného napětí (Multisim) (úloha pro seznámení s prostředím MULTISIM.0) Popis úlohy: Cílem úlohy je potvrdit často opomíjený, byť
Laboratorní úloha KLS Vliv souhlasného rušení na výsledek měření stejnosměrného napětí (Multisim) (úloha pro seznámení s prostředím MULTISIM.0) Popis úlohy: Cílem úlohy je potvrdit často opomíjený, byť
Střední průmyslová škola elektrotechnická a informačních technologií Brno
 Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.07/1.5.00/34.0521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.07/1.5.00/34.0521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
PRŮTOK PLYNU OTVOREM
 PRŮTOK PLYNU OTVOREM P. Škrabánek, F. Dušek Univerzita Pardubice, Fakulta chemicko technologická Katedra řízení rocesů a výočetní techniky Abstrakt Článek se zabývá ověřením oužitelnosti Saint Vénantovavy
PRŮTOK PLYNU OTVOREM P. Škrabánek, F. Dušek Univerzita Pardubice, Fakulta chemicko technologická Katedra řízení rocesů a výočetní techniky Abstrakt Článek se zabývá ověřením oužitelnosti Saint Vénantovavy
b) Vypočtěte frekvenci f pro všechny měřené signály použitím vztahu
 Vypočtěte frekvenci f pro všechny měřené signály použitím vztahu") 1. Měření napětí a frekvence elektrických signálů osciloskopem Cíl úlohy: Naučit se manipulaci s osciloskopem a používat jej pro měření napětí a frekvence střídavých elektrických signálů. Dvoukanálový
1. Měření napětí a frekvence elektrických signálů osciloskopem Cíl úlohy: Naučit se manipulaci s osciloskopem a používat jej pro měření napětí a frekvence střídavých elektrických signálů. Dvoukanálový