Průniky rotačních ploch
|
|
|
- Danuše Marková
- před 8 lety
- Počet zobrazení:
Transkript
1 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Průniky rotačních ploch Vypracoval: Vojtěch Trnka Třída: 8. M Školní rok: 2012/2013 Seminář: Deskriptivní geometrie

2 Prohlašuji, že jsem svou ročníkovou práci napsal samostatně a výhradně s použitím citovaných pramenů. Souhlasím s využíváním práce na Gymnáziu Christiana Dopplera pro studijní účely. V Praze dne: Vojtěch Trnka

3 OBSAH Obsah 2 Úvod 3 1. Rotační plocha Vznik Některé pojmy Průniky rotačních ploch 7 2. Rotační kvadriky Rotační paraboloid Rotační elipsoid Rotační hyperboloid Rotační jednodílný hyperboloid Rotační dvoudílný hyperboloid Průniky rotačních kvadrik Využití v praxi 27 Závěr 30 Zdroje 31 2

4 Úvod V této práci bych čtenáře chtěl nejprve seznámit se základními pojmy týkajících se rotačních ploch. Následně ukázat mnou vybrané průniky některých rotačních ploch a to i průnik rotačních kvadrik. Na závěr práce ukázat některá využití v praxi ať už strojírenské nebo stavební. 3

5 1. Rotační plocha 1. 1 Vznik Zvolme si křivku k a osu o. Nechme rotovat křivku k kolem osy o. Osa o je tedy osou rotace. Rotační plocha Φ vznikne rotací křivky kolem o, přičemž křivka neleží v rovině kolmé na osu rotace anebo není shodná s osou o Některé pojmy Rovnoběžková kružnice Každý bod křivky (při tomto rotačním pohybu) opisuje kružnici. Rovina této kružnice je kolmá na osu o a střed kružnice leží na ose. Tyto kružnice se nazývají rovnoběžkové kružnice. Tvoří důležitý systém čar na rotační ploše. Rotační plocha tedy nevzniká pouze rotací křivky k, ale i rotací každé jiné křivky k která protíná všechny rovnoběžkové kružnice této rotační plochy. Meridián Máme rovinu µ procházející osou rotační plochy. Křivka řezu roviny µ a rotační plochy se nazývá meridiánem. Každý meridián je souměrný podle osy rotace. Také se skládá ze dvou křivek polomeridiánů. Rotací každého polomeridiánu vzniká opět rotační plocha Φ. Všechny meridiány rotační plochy jsou shodné křivky, přičemž jedna v druhou přechází otočením kolem osy o. Tečná rovina Každým bodem na rotační ploše neležícím na ose rotace prochází jedna rovnoběžková kružnice a jeden meridián. V každém takovémto bodě lze tedy sestrojit dvě tečny. Tečnu meridiánu, která protíná osu o a tečnu rovnoběžkové kružnice, která je kolmá k ose a k rovině meridiánu. Obě tečny v tomto bodě tvoří tečnou rovinu. 4

6 Obr. 1. Rotační plocha Φ. Když necháme rotovat tečnu meridiánu kolem osy podél rovnoběžkové kružnice dané rotací dotykového bodu, vznikne tak rotační kuželová nebo válcová plocha. Tyto plochy se nazývají dotyková kuželová nebo válcová plocha. Pokud rotuje normála rotační plochy kolem její osy, vzniká tak normálová kuželová a normálová válcová plocha. 5

7 Obr. 2 Dotyková a normálová kuželová plocha. Tečna t k meridiánu m vytváří při rotaci kolem osy o (přímkovou) rotační plochu Ω, která se dotýká plochy Φ podél rovnoběžky b (obě plochy mají v každém bodě kružnice b společnou tečnou rovinu). Předpokládejme nejdříve, že t protíná osu o v bodě V. Jestliže t není kolmá k, pak je Ω rotační kuželová plocha o vrcholu V. σormála n k meridiánu m v bodě A je vzhledem k n t, n u kolmá k tečné rovině plochy Φ a protíná osu o v bode W. Rotací přímky n vzniká rotační kuželová plocha Ω o vrcholu W. ([1], str. 9) Důležité rovnoběžkové kružnice na rotační ploše Tyto kružnice se nazývají rovník a hrdlo (neboli hrdlová kružnice). Pro upřesnění je to největší a nejmenší rovnoběžková kružnice na rotační ploše. Tečné kuželové plochy těchto kružnic přecházejí v plochy válcové. V náryse rotační plochy tvoří zdánlivý obrys, v půdoryse jsou to pak soustředné kružnice tvořící prvotní obrys půdorysu rotační plochy. Na obr. 1. Jsou to kružnice p a q. 6

8 1. 3 Průniky rotačních ploch V této kapitole se budu již věnovat samotním průnikům rotačních ploch. V závěru kapitoly popíšu některé konstrukce (popřípadě tvorbu průnikové křivky). Průnikem rotačních ploch je množina jejich společných bodů. Z obecného hlediska je průnikem křivka. Jedním možným způsobem jak určíme body této křivky je zavedením pomocných rovin. Vždy volíme vhodnou rovinu tak, aby křivky průniku s námi vybranými rotačními plochami byly co nejjednodušší. Hledaný průnik pak určují společné body průnikových křivek. Důležitá je poloha os rotačních ploch. Podle toho pak volíme pomocné roviny. Osy můžeme mít: Splývající Dvě rotační plochy mají splývající osu rotace. Pokud májí takovéto dvě plochy společný bod A (neležící na společné ose rotace), mají také společnou rovnoběžkovou kružnici, kterou opisuje při rotaci bod A. Pokud je společná osa rovnoběžná s průmětnou, pak se průniková kružnice zobrazí do úsečky, která je kolmá k průmětu osy. Rovnoběžné osy (různé) Společná rovina souměrnosti obou ploch, je rovina, která je určena oběma osami rotačních ploch. Zároveň je tedy i rovinou souměrnosti průnikové křivky. Pomocné plochy volíme tak, aby byly kolmé k oběma osám rotace. Tyto roviny protínají rot. plochy v rovnoběžkových kružnicích. Body průniku jsou pak jejich společné body. Různoběžné osy V tomto případě volíme za pomocné plochy kulové plochy. Střed těchto ploch je v průsečíku os rot. ploch. Kulovou plochu, kterou zvolíme, má společnou osu s každou z rotačních ploch. Tato kulová plocha je protíná v rovnoběžkových kružnicích. Je-li 1 k (resp. 2 k) rovnoběžkových kružnicích, v níž kulová plocha k protíná plochu 1 Φ (resp. 2 k), pak spolčené body A, A kružnic 1 k, 2 k je bodem průniku. Průniková křivka je souměrná podle spolčené roviny souměrnosti = 1 o 2 o obou rotačních ploch. Mimoběžné osy V tomto případě je nutno zvolit pomocné plochy takovým způsobem, aby průnikové křivky byly co nejjednodušší. Když zvolíme například rovinu kolmou k ose jedné rotační 7

9 plochy, tak protíná tuto plochu v kružnici. Pokud její řez s druhou rotační plochou je jednoduchá křivka, volíme pomocné roviny rovnoběžné se zvolenou rovinou. V případě, že rez s druhou rovinou není jednoduchá křivka, zvolíme tedy rovinu kolmou k druhé ose a následně vyhledáme řez s první rotační plochou. Pokud ani toto není jednoduchá křivka, pak se zpravidla zvolí pomocné roviny rovnoběžné s oběma osami. Nyní se podíváme na některé průniky. Příklad průniku rotačních ploch se společnou osou rotace o vidíme na obr. 3 a 4. Jejich průnik se skládá z rovnoběžkových kružnic. Které vznikají rotací společného bodu meridiánů obou rotačních ploch (již bylo zmíněno výše). Na obr. 3 vidíme průnik dvou rotačních kuželových ploch v Mongeově projekci. Z obrázku je patrná průsečná rovnoběžková kružnice k. Obr. 3 Obr. 4 znázorňuje zastřešení věže nad čtvercovým půdorysem ABCD. Z vrcholů čtverce vychází česká klenba. Na české klenbě je podpěrná zeď tambur. Průnik rotační plochy válcové (tamburu) se sférou je kružnice κ. Cípy české klenby AEF, BFG, GCH, HDE se nazývají penditivy, nad tamburem je báň z polosféry. 8

10 Obr. 4 Případ rovnoběžných os různých znázorňuje obr. 5. Zde využíváme rovnoběžkových kružnic ve společných rovinách. Bod (L) dostaneme průsečíkem rovnoběžkových kružnic sklopených do nárysny a následně bod L 1 je pata kolmice vedené z bodu (L) na společnou rovinu. 9
 na")
11 Obr. 5 Příklad různoběžných os vidíme na obr. 6. Rovnoběžkové kružnice ležící na jedné ploše určuje kulová plocha κ opsaná kolem bodu O (průsečík os rotace). Kulová a rotační plocha mají totožné osy. Jejich průnikem je tedy rovnoběžková kružnice. Je-li κ taková kulová plocha, potom 1 k, resp. 1 k, je průnik plochy κ s danými plochami. Mají tedy společné body, které jsou body průnikové křivky. 10

12 Obr. 6 Nyní si předvedeme konstrukci průsečné křivky kužele (určeného rotační kuželovou plochou) a válce (určeného rotační válcovou plochou) ve vojenské perspektivě (obr. 7). Vojenská perspektiva je určena osami x, y, z. Osa x je kolmá na osu y. y svírá se z tupý úhel. x y z = O počátek soustavy. Nejprve sestrojíme samotný kužel. Osa z je osou rotace hlavního meridiánu kužele. Ten zhotovíme tak, že podstava trojúhelníku ABV je půlena osou z a hlavní vrchol V trojúhelníku leží na z. Tedy AO = OB a AV = BV. Výšku OV rozdělíme např. na 12 dílů (možno i více či méně). V každém bodě vedeme kolmici se z. Vzniknou nám tak rovnoběžky, které jsou rovnoběžkovými kružnicemi v nárysně. Jejich průsečíky s osou z jsou jejich středy. Každému středu opíšeme kružnici, jejíž poloměr je dán vždy středem kružnice a průsečíkem rovnoběžky s hlavním meridiánem. Rotační plochu pak vytváří obalová křivka těchto kružnic. Nyní sestrojíme válcovou plochu. Kružnici podstavy válce načrtnu pomocí rovnoběžníku LMNR. Střed každé strany tohoto rovnoběžníku je tečným bodem kružnice do něj vepsané. Zde se nám jeví jako elipsa. Přímky a, b jsou rovnoběžné s osou x, zároveň jsou tečnami podstavné kružnice a vymezují plochu rotačního válce. 11
. V každém bodě vedeme kolmici se z. Vzniknou nám tak rovnoběžky, které jsou rovnoběžkovými kružnicemi v nárysně.")
13 Zvolme na obvodu podstavy válce libovolný bod K. Tímto bodem vedeme přímku s kolmou na x. Ta nám protíná svislou osu podstavy v bodě II. Vedeme přímku rovnoběžnou s x. Ta nám protne osu o 1 = z v bodě II. Tomuto bodu opíšeme kružnici, jejíž poloměr určuje II a průsečík přímky kolmé s osou z s hlavním meridiánem. Průsečík této kružnice s přímkou s je bod na průsečné křivce k. Tu vykreslíme pomocí několika dalších bodů, které zhotovíme tímto způsobem. 12

14 Obr. 7 13

15 Průnik dvou válců se stejným poloměrem a kolmými osami rotace vzniká křížová klenba (obr. 8). V kosoúhlém promítání zvolme osy tak, aby x směřovala vlevo nahoru, bude se tedy jednat o zadní nadhled v KP(120,1). Nechť O je počátek soustavy. Následně zhotovíme půdorys podstavného čtverce ABCD, A=O a AB = BC = CD = DA. Kolem strany AB opíšeme kružnici k 1 se středem v polovině AB. Kružnici opíšeme také úsečce DC, k 2. Kružnice k 3 =e 1 a k 4 =e 2 se budou jevit jako elipsy. Pro zjednodušení je zhotovíme pomocí rovnoběžníku AA D D a BB C C, AA = BB = CC = DD = poloměru kružnice. Body S 1 4 jsou středy stran čtverce ABCD. Průsečík úseček S 1 S 2 a S 3 S 4 určuje V pata vrcholu v půdorysné rovině. Průsečíky vrcholových přímek XZ a YU válců určují vrchol klenby. V je také střed rovnoběžníku A B C D daný průsečíkem jeho uhlopříček. Nyní sestrojíme průsečné křivky válců žebra klenby. Ty zhotovíme podobně jako e 1 a e 2 pomocí rovnoběžníku ACC A a BDD B. Obě žebra se protnou v bodě V. Křížovou klenbu si trochu blíže popíšeme v kapitole využití. 14

16 Obr. 8 15

17 2. Rotační kvadriky Rotační plochy druhého stupně (neboli rotační kvadriky) vznikají rotací kuželosečky kolem její osy souměrnosti. Podle toho, jestli rotuje kuželosečka singulární nebo regulární, dělíme i kvadriky na singulární a regulární. Singulární kvadriky jsou rotační válcová a rotační kuželová plocha Rotací regulární kuželosečky, kterými se v této kapitole budeme zabývat, dostáváme šest typů rotačních ploch druhého stupně. Jsou jimi: Kulová plocha, která vzniká rotací kružnice okolo jejího průměru, rotační vejcovitý elipsoid vznikající rotací elipsy okolo její hlavní osy, rotační zploštělý elipsoid vznikající rotací elipsy okolo její vedlejší osy, rotační jednodílný hyperboloid, který vnikne rotací hyperboly okolo její vedlejší osy, rotační dvojdílný hyperboloid, který vznikne rotací hyperboly okolo její hlavní osy a rotační paraboloid, který vzniká rotací paraboly okolo její osy. Tyto typy si můžete prohlédnout na obr. 3. Obr. 9 16

18 Nyní uvedu některé z výše uvedených typů rotačních kvadrik. U každé uvedu její rovnici v pravoúhlém souřadném systému, její Mongeovu projekci a některou z její vlastnost. 2.1 Rotační paraboloid Rotační paraboloid má na ose rotace pouze jeden vrchol. Jedná se tedy o nestředovou kvadriku. Vrchol paraboloidu na obrázku leží v půdorysně. Celá půdorysna je prvním průmětem plochy. Bod F je ohnisko paraboloidu. Rotace paraboly, díky které vzniká rotační paraboloid je: x 2 + y 2 = 2pz Vrchol paraboloidu je v počátku souřadnicového systému. Obr

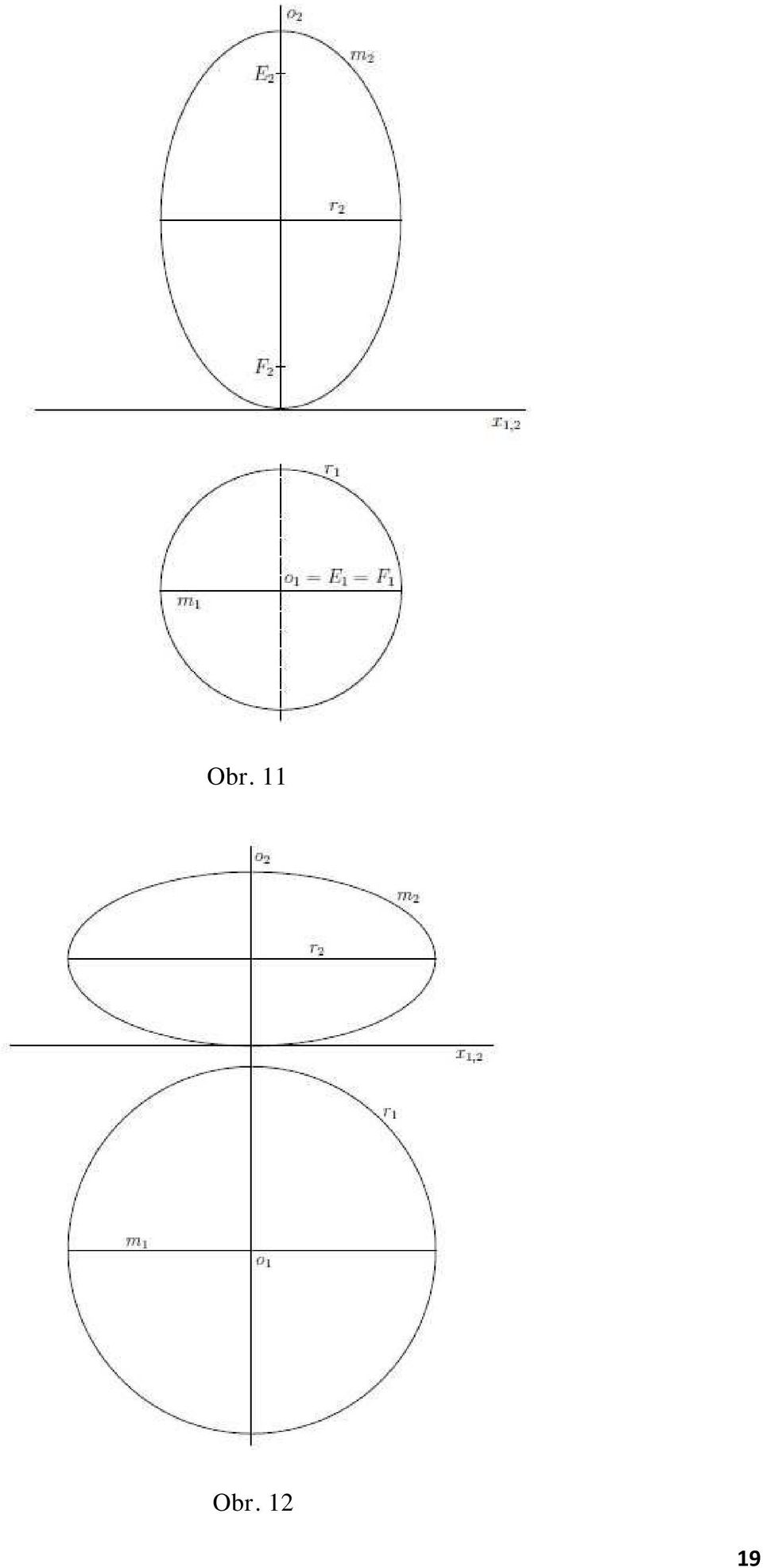
19 2.2 Rotační elipsoid Jedná s o středovou kvadriku s dvěma vrcholy na ose rotace. Na obrázcích 4 a 5 vidíme protáhlý elipsoid a zploštělý elipsoid. Dále vidíme sdružené průměty m hlavního meridiánu a rovníku r. Body E a F jsou ohniska elipsy m. Protáhlý elipsoid vznikne tedy rotací m a je množinou všech bodů v prostoru, které mají součet vzdáleností od ohnisek E a F konstantní. A roven velikosti hlavní osy elipsy m. Jak je uvedeno výše, je-li osa rotace hlavní osa elipsy, vzniká tak elipsoid vejčitý (protáhlý) a pokud osa rotace je vedlejší osa elipsy, vznikne tak elipsoid zploštělý. Rovnice rotující elipsy má tvar: Pokud je a < c jedná se o elipsoid vejčitý, a tedy pokud a > c je elipsoid zploštělý. Pokud a = c tak dostaneme kulovou plochu. 18
 a pokud osa rotace je vedlejší osa elipsy, vznikne tak elipsoid zploštělý.")
20 Obr. 11 Obr
21 2. 3 Rotační hyperboloid Rotační hyperboloid je středová kvadrika. Rotující asymptoty hyperboly vytvářejí při její rotaci okolo osy asymptotickou kuželovou plochu rotačního hyperboloidu Rotační jednodílný hyperboloid Rotační hyperboloid nevzniká pouze rotací hyperboly kolem její vedlejší osy, ale také rotací přímky. Ta je s osou rotace mimoběžná. Proto je tento hyperboloid přímkovou plochou. Množina všech takovýchto přímek se nazývá regulus hyperboloidu. Všechny přímky regulu jsou navzájem mimoběžné. Na hyperboloidu najdeme dva reguly. Ten druhý vzniká rotací přímky v opačném směru. Pro lepší představu nám pomůže obr. 13. Máme dvě kruhové destičky. Ty tvoří hraniční kruhy rotační válcové plochy. Mezi nimi je osa. Tvořící přímky nahradíme nitěmi. Vrchní destička se může otáčet. Pružina na ose udržuje nitě v napětí. Podle toho jakým směrem otočíme vrchní destičku, dostaneme první a nebo druhý systém přímek na ploše (regulus). Obr. 13 Jednodílný rotační hyperboloid vzniká rotací hyperboly. Její rovnice je: 20
22 Na obrázku níže máme hyperboloid zobrazen v Mongeově promítání. Osa rotace je kolmá k π. h 1 je prvním obrysem půdorysu h (hrdelní kružnice). Hyperbola m 2 je druhým obrysem a vnitřek hyperboly je nárysem plochy. Přímka a je přímkou regulu hyperboloidu. Obr. 14, jednodílný rot. hyperboloid v Mongeově projekci 21
23 Obr.15, Jednodílný rot. hyperboloid jako přímková plocha Rotační dvoudílný hyperboloid Rotační dvoudílný hyperboloid má dva vrcholy. Jde o množinu bodů v prostoru, jejichž absolutní hodnota rozdílu jejich vzdáleností od dvou různých bodů je konstantní. Na obrázku ho vidíme zobrazený v Mongeově promítání kde je omezen půdorysnou a rovinou α. První průmět hyperboloidu je půdorysna. Na obrázku vidíme kružnice řezu hyperboloidu a kružnice rezu asymptotické kuželové plochy s půdorysnou. Rovnice rotující hyperboly dvojdílného hyperboloidu je: 22
24 2. 4 Průniky rotačních kvadrik Obr.16, dvoudílný rot. hyperboloid Máme dvě rotační kvadriky. Jejich průniková křivka je obecně prostorovou křivkou 4. stupně (kvartika). Pokud se dotýkají kvadriky ve dvou bodech, tyto body jsou pak dvojnásobné a průniková křivka se rozpadne na dvě kuželosečky. Na dvě kuželosečky u, v se také rozpadne průnik dvou rotačních kvadrik, když jsou obě tyto kvadriky opsány stejné kulové ploše. V tomto případě se kvadriky dotýkají kulové plochy podél rovnoběžkových kružnic k 1 a k 2, v jejichž průsečících D 1 ad 2 navzájem dotýkají, tedy se průnik rozpadá. Mají-li kvadriky společnou rovinu souměrnosti, je kolmý průmět průnikové křivky do této roviny (nebo do roviny s ní rovnoběžné) kuželosečka. Pravoúhlým průmětem průnikové křivky rovinná křivka 4. stupně, pokud leží osy dvou kvadrik v jedné rovině, pak jsou obě plochy i průniková křivka souměrné podle roviny. Dva 23
25 body souměrné podle se do této roviny pravoúhle promítají do jednoho bodu, pravoúhlým průmětem k 2 průnikové křivky k do roviny je kuželosečka nebo její část. Kolmé průměty průniku dvou rotačních kvadrik s různými rovnoběžnými osami (nebo kvadrik jim podobných a podobně položených) do roviny rovnoběžné s oběma osami jsou kuželosečky podobné Podobné nebo podobně položené kvadriky mají tutéž nevlastní kuželosečku, procházejí jejich průniky resp. průniky kvadrik s nimi homotetických týmž společnými body obou nevlastních kuželoseček. Jejich kolmé průměty do roviny souměrnosti (do roviny s touto rovnoběžné) jsou kuželosečky homotetické. Kolmým průmětem průniku dvou kvadrik do roviny jejich souměrnosti je: Hyperbola osy jsou různoběžné a obě kvadriky jsou a) stejného typu, b) ze skupiny: válec, kužel, hyperboloid, paraboloid, protáhlý elipsoid. Parabola jde-li o průnik a) dvou libovolných jednoduchých kvadrik, jejichž osy jsou rovnoběžné (neuvažujeme dva rotační válce), b) kulové plochy s libovolnou kvadrikou. Elipsa je-li jedna z kvadrik zploštělý elipsoid a druhá není kulová plocha, při různoběžných osách. Rovnoosá hyperbola jsou-li obě kvadriky podobné a protínají se jejich osy. Nyní sestrojíme dva průniky rotačních kvadrik. Jako první sestrojíme průnik zploštělého elipsoidu a rotačního paraboloidu s různoběžnými osami ležícími v nárysně. Průnikem těchto kvadrik je křivka, jejímž nárysem je část elipsy. Sestrojíme dostatečný počet bodů této elipsy. Ke konstrukci bodů použijeme stejnou metodu jako v případě obecných rotačních ploch. Volíme pomocné kulové plochy se středem R (průsečík os rotačních ploch). Kulové plochy takto zvolené mají s rotačními kvadrikami společné rovnoběžkové kružnice a a b, průsečíky těchto kružnic patří průnikové křivce. Průnikové křivce k patří i společné body hlavních meridiánů. Určíme alespoň 5 prvků (body, tečny či tečny s body dotyku), elipsa, jejíž je k 2 částí je pěti prvky dostatečně určena a lze ji sestrojit. 24
26 Obr. 17 Nyní sestrojíme průnik rotačního jednodílného hyperboloidu a rotačního dvojdílného hyperboloidu s rovnoběžnými osami ležícími v nárysně. Opět postupujeme podobně jako v případě obecných rotačních ploch (viz obr. 5). Volíme pomocné roviny kolmé k osám kvadrik. Tyto roviny protnou kvadriky v rovnoběžkových kružnicích. Jejich společné body patří průnikové křivce k. Nárys k 2 je částí paraboly, kterou určíme dostatečným počtem prvků (např. pěti body). 25
27 Obr
28 3. Využití v praxi V této kapitole bych ukázal některá využití rotačních ploch. V první řadě bych asi uvedl využití rotačních kvadrik. Technické praxi se z rotačních ploch 2. stupně (krom ploch kuželových, válcových a koule) nejčastěji využívají rotační paraboloidy a jednodílné hyperboloidy. Rotační paraboloid můžeme vidět např. jako odrazovou plochu reflektorů, teleskopů, televizních antén, atd. Na obr. 19 vidíme právě parabolickou anténu. Obr. 19 Asi nejčastější využíváme část rotačního jednodílného hyperboloidu jako plocha povrchu chladírenských věží. Dále se využívá např. k hyperboloidním převodům mimoběžných os. 27
29 Obr. 20, hyperboloidní převod Obr. 21, chladírenská věž Ve stavebnictví je také využíváno průniku dvou rotačních válců s osami kolmými a stejným poloměrem. Vzniká tak nad čtvercovým půdorysem křížová klenba (vznik jsem popsal výše). Oblouky křížové klenby mohou být různých tvarů např.: plný oblouk, segment, gotický oblouk, atd. Základním tvarem je však plná křížová klenba. V místech průniku válců vznikají tzv. ostrá 28
30 žebra, části klenby mezi žebry se nazývají prsa. Vše je patrné z obr. 21. Tlaky křížové klenby se soustředí do žeber a z nich jsou přenášeny do rohů zaklenuté místnosti. Stačí tedy jen podepřít klenbu v rozích sloupy a nemusíme využívat obvodových podpor. Obr. 21 Dále využívá průniku rotačních ploch např. u okapů. Na obr. 23 vidíme okapový žlab s kuželovým ústím do svodu. Obr
31 Závěr V této práci jsem se věnoval rotačním plochám obecným a rotačním kvadrikám. U každého z těchto témat jsem uvedl základní pojmy. Dále jsem se věnoval jejich průnikům a problematice vytvoření průsečných křivek a uvedl některé konstrukce. Uvedl jsem také některá využití v praxi strojírenské či stavební. Tato práce může sloužit jako případný zdroj informací těm, kteří by se chtěli dozvědět základní informace o rotačních plochách. 30
32 Zdroje [1] Diplomová práce z Masarykovy univerzity v Brně, volně k dostání na internetu na webových stránkách: [2] [3] Medek, Václav (1λ62): Deskriptivní geometrie, Státní nakladatelství technické literatury, Praha 1, Spálená 51 [4] F. Kadeřávek, V. Havel, F. Harant (1λ5κ): Plochy stavebně inženýrské praxe, Nakladatelství Československé akademie věd, Praha [5] J. Kounovský, F. Vyčichlo (1λ56): Deskriptivní geometrie, Nakladatelství Československé akademie věd, Praha [6] J. Kohout, A. Tobek (1998) Zednictví, Tradice z pohledu dneška, Grada Publishing, spol. s r. o., U Průhonu, Praha 7 [7] ústní konzultace s Mgr. Ondřej Machů 31
Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X se nazývá obraz.
 7. Shodná zobrazení 6. ročník 7. Shodná zobrazení 7.1. Shodnost geometrických obrazců Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor,
7. Shodná zobrazení 6. ročník 7. Shodná zobrazení 7.1. Shodnost geometrických obrazců Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor,
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Teoretické řešení střech
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
c sin Příklad 2 : v trojúhelníku ABC platí : a = 11,6 dm, c = 9 dm, α = 65 0 30. Vypočtěte stranu b a zbývající úhly.
 9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
ROTAČNÍ KVADRIKY. Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou
 ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH
 ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH Vypracoval: Jan Vojtíšek Třída: 8.M Školní rok: 2011/2012 Seminář: Aplikace Deskriptivní geometrie Prohlašuji, že jsem svou ročníkovou práci napsal samostatně a
ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH Vypracoval: Jan Vojtíšek Třída: 8.M Školní rok: 2011/2012 Seminář: Aplikace Deskriptivní geometrie Prohlašuji, že jsem svou ročníkovou práci napsal samostatně a
Poznámka 1: Každý příklad začneme pro přehlednost do nového souboru tímto krokem:
 Mongeovo promítání základní úlohy metrické (skutečná velikost úsečky - sklápění, kolmice k rovině, vzdálenost bodu od roviny, vzdálenost bodu od přímky, rovina kolmá k přímce, otáčení roviny, trojúhelník
Mongeovo promítání základní úlohy metrické (skutečná velikost úsečky - sklápění, kolmice k rovině, vzdálenost bodu od roviny, vzdálenost bodu od přímky, rovina kolmá k přímce, otáčení roviny, trojúhelník
Vysoká škola báňská Technická univerzita Ostrava KUŽELOSEČKY, KOLINEACE
 Vysoká škola báňská Technická univerzita Ostrava KUŽELOEČKY KOLINECE Deskriptivní geometrie Krista Dudková Radka Hamříková O T R V 0 0 5 OH 1. Kuželosečky 5 1.1. Řezy na kuželové ploše 5 1.. Elipsa 7 odová
Vysoká škola báňská Technická univerzita Ostrava KUŽELOEČKY KOLINECE Deskriptivní geometrie Krista Dudková Radka Hamříková O T R V 0 0 5 OH 1. Kuželosečky 5 1.1. Řezy na kuželové ploše 5 1.. Elipsa 7 odová
Úlohy domácího kola kategorie C
 50. ročník Matematické olympiády Úlohy domácího kola kategorie 1. Najděte všechna trojmístná čísla n taková, že poslední trojčíslí čísla n 2 je shodné s číslem n. Student může při řešení úlohy postupovat
50. ročník Matematické olympiády Úlohy domácího kola kategorie 1. Najděte všechna trojmístná čísla n taková, že poslední trojčíslí čísla n 2 je shodné s číslem n. Student může při řešení úlohy postupovat
Kótování na strojnických výkresech 1.část
 Kótování na strojnických výkresech 1.část Pro čtení výkresů, tj. určení rozměrů nebo polohy předmětu, jsou rozhodující kóty. Z tohoto důvodu je kótování jedna z nejzodpovědnějších prací na technických
Kótování na strojnických výkresech 1.část Pro čtení výkresů, tj. určení rozměrů nebo polohy předmětu, jsou rozhodující kóty. Z tohoto důvodu je kótování jedna z nejzodpovědnějších prací na technických
Autodesk Inventor 8 vysunutí
 Nyní je náčrt posazen rohem do počátku souřadného systému. Autodesk Inventor 8 vysunutí Následující text popisuje vznik 3D modelu pomocí příkazu Vysunout. Vyjdeme z náčrtu na obrázku 1. Obrázek 1: Náčrt
Nyní je náčrt posazen rohem do počátku souřadného systému. Autodesk Inventor 8 vysunutí Následující text popisuje vznik 3D modelu pomocí příkazu Vysunout. Vyjdeme z náčrtu na obrázku 1. Obrázek 1: Náčrt
3.cvičení. k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR. 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ),
, v(y, r 1 = XA ) u v = {A, R} q = AR. 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ),") 3.cvičení 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ), k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR Bodem A rovnoběžku: Ještě jednu kolmici. Tři úhly, které je možno rozdělit
3.cvičení 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ), k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR Bodem A rovnoběžku: Ještě jednu kolmici. Tři úhly, které je možno rozdělit
4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů
, tvorba složených objektů") 4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů Příklad 1: Pracujte v pohledu Shora. Sestrojte kružnici se středem [0,0,0], poloměrem 10 a kružnici
4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů Příklad 1: Pracujte v pohledu Shora. Sestrojte kružnici se středem [0,0,0], poloměrem 10 a kružnici
1.7. Mechanické kmitání
 1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
Č část četnost. 部 分 频 率 relativní četnost 率, 相 对 频 数
 A absolutní člen 常 量 成 员 absolutní hodnota čísla 绝 对 值 algebraický výraz 代 数 表 达 式 ar 公 亩 aritmetický průměr 算 术 均 数 aritmetika 算 术, 算 法 B boční hrana 侧 棱 boční hrany jehlanu 角 锥 的 侧 棱 boční stěny jehlanu
A absolutní člen 常 量 成 员 absolutní hodnota čísla 绝 对 值 algebraický výraz 代 数 表 达 式 ar 公 亩 aritmetický průměr 算 术 均 数 aritmetika 算 术, 算 法 B boční hrana 侧 棱 boční hrany jehlanu 角 锥 的 侧 棱 boční stěny jehlanu
GEOMETRICKÁ TĚLESA. Mnohostěny
 GEOMETRICKÁ TĚLESA Geometrické těleso je prostorový geometrický útvar, který je omezený (ohraničený), tato hranice mu náleží. Jeho povrch tvoří rovinné útvary a také různé složitější plochy. Geometrická
GEOMETRICKÁ TĚLESA Geometrické těleso je prostorový geometrický útvar, který je omezený (ohraničený), tato hranice mu náleží. Jeho povrch tvoří rovinné útvary a také různé složitější plochy. Geometrická
Mechanismy. Vazby členů v mechanismech (v rovině):
:") Mechanismy Mechanismus klikový, čtyřkloubový, kulisový, západkový a vačkový jsou nejčastějšími mechanismy ve strojích (kromě převodů). Mechanismy obsahují členy (kliky, ojnice, těhlice, křižáky a další).
Mechanismy Mechanismus klikový, čtyřkloubový, kulisový, západkový a vačkový jsou nejčastějšími mechanismy ve strojích (kromě převodů). Mechanismy obsahují členy (kliky, ojnice, těhlice, křižáky a další).
Název školy. Moravské gymnázium Brno s.r.o. Mgr. Marie Chadimová Mgr. Věra Jeřábková. Autor. Matematika. Planimetrie. Trojúhelníky. Teorie a příklady.
 Číslo projektu Z.1.07/1.5.00/34.0743 Název školy Moravské gymnázium rno s.r.o. utor Tematická oblast Mgr. Marie hadimová Mgr. Věra Jeřábková Matematika. Planimetrie. Trojúhelníky. Teorie a příklady. Ročník
Číslo projektu Z.1.07/1.5.00/34.0743 Název školy Moravské gymnázium rno s.r.o. utor Tematická oblast Mgr. Marie hadimová Mgr. Věra Jeřábková Matematika. Planimetrie. Trojúhelníky. Teorie a příklady. Ročník
STEREOMETRIE, OBJEMY A POVRCHY TĚLES
 STEREOMETRIE, OBJEMY POVRCHY TĚLES Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia utoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky
STEREOMETRIE, OBJEMY POVRCHY TĚLES Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia utoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky
Předmět: Ročník: Vytvořil: Datum: ŠČERBOVÁ M. PAVELKA V. NOSNÍKY NOSNÍKY
 Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 16. ČERVNA 2012 Název zpracovaného celku: NOSNÍKY NOSNÍKY Nosníky jsou zpravidla přímá tělesa (pruty) uloţená na podporách nebo
Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 16. ČERVNA 2012 Název zpracovaného celku: NOSNÍKY NOSNÍKY Nosníky jsou zpravidla přímá tělesa (pruty) uloţená na podporách nebo
Vyučovací předmět / ročník: Matematika / 5. Učivo
 Vzdělávací oblast: Matematika a její aplikace Výstupy žáka Vyučovací předmět / ročník: Matematika / 5. ČÍSLO A POČETNÍ OPERACE Zpracoval: Mgr. Dana Štěpánová orientuje se v posloupnosti přirozených čísel
Vzdělávací oblast: Matematika a její aplikace Výstupy žáka Vyučovací předmět / ročník: Matematika / 5. ČÍSLO A POČETNÍ OPERACE Zpracoval: Mgr. Dana Štěpánová orientuje se v posloupnosti přirozených čísel
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.3 HŘÍDELOVÉ SPOJKY Spojky jsou strojní části, kterými je spojen hřídel hnacího ústrojí s hřídelem ústrojí
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.3 HŘÍDELOVÉ SPOJKY Spojky jsou strojní části, kterými je spojen hřídel hnacího ústrojí s hřídelem ústrojí
Plochy stavebně-inženýrské praxe
 Plochy stavebně-inženýrské praxe 9. Plochy rourové In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 95 98. Persistent
Plochy stavebně-inženýrské praxe 9. Plochy rourové In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 95 98. Persistent
Výstupy Učivo Téma. Čas. Základní škola a mateřská škola Hať. Školní vzdělávací program. Průřezová témata, kontexty a přesahy,další poznámky
 provádí pamětné a písemné početní Čísla přirozená Opakování září, říjen operace v oboru přirozených čísel porovnává a uspořádává čísla celá a Čísla celá, racionální racionální, provádí početní operace
provádí pamětné a písemné početní Čísla přirozená Opakování září, říjen operace v oboru přirozených čísel porovnává a uspořádává čísla celá a Čísla celá, racionální racionální, provádí početní operace
3D modely v programu Rhinoceros
 3D modely v programu Rhinoceros Petra Surynková Dep. of Mathematics Education, Fac. of Mathematics and Physics, Charles University in Prague Sokolovská 83, 186 75 Praha 8, Czech Republic email: petra.surynkova@seznam.cz
3D modely v programu Rhinoceros Petra Surynková Dep. of Mathematics Education, Fac. of Mathematics and Physics, Charles University in Prague Sokolovská 83, 186 75 Praha 8, Czech Republic email: petra.surynkova@seznam.cz
3.5.8 Otočení. Předpoklady: 3506
 3.5.8 Otočení Předpoklady: 3506 efinice úhlu ze základní školy: Úhel je část roviny ohraničená dvojicí polopřímek se společným počátečním bodem (konvexní a nekonvexní úhel). Nevýhody této definice: Nevíme,
3.5.8 Otočení Předpoklady: 3506 efinice úhlu ze základní školy: Úhel je část roviny ohraničená dvojicí polopřímek se společným počátečním bodem (konvexní a nekonvexní úhel). Nevýhody této definice: Nevíme,
1.9.5 Středově souměrné útvary
 1.9.5 Středově souměrné útvary Předpoklady: 010904 Př. 1: V obdélníkových rámech jsou nakresleny tři obrázky. Každý je sestaven z jedné přímky a jednoho obdélníku. Jeden z obrázků je středově souměrný.
1.9.5 Středově souměrné útvary Předpoklady: 010904 Př. 1: V obdélníkových rámech jsou nakresleny tři obrázky. Každý je sestaven z jedné přímky a jednoho obdélníku. Jeden z obrázků je středově souměrný.
3.1.4 Trojúhelník. Předpoklady: 3103. Každé tři různé body neležící v přímce určují trojúhelník. C. Co to je, víme. Jak ho definovat?
 3..4 Trojúhelní Předpolady: 303 Každé tři různé body neležící v přímce určují trojúhelní. o to je, víme. Ja ho definovat? Př. : Definuj trojúhelní jao průni polorovin. Trojúhelní je průni polorovin, a.
3..4 Trojúhelní Předpolady: 303 Každé tři různé body neležící v přímce určují trojúhelní. o to je, víme. Ja ho definovat? Př. : Definuj trojúhelní jao průni polorovin. Trojúhelní je průni polorovin, a.
Mezní kalibry. Druhy kalibrů podle přesnosti: - dílenské kalibry - používají ve výrobě, - porovnávací kalibry - pro kontrolu dílenských kalibrů.
 Mezní kalibry Mezními kalibry zjistíme, zda je rozměr součástky v povolených mezích, tj. v toleranci. Mají dobrou a zmetkovou stranu. Zmetková strana je označená červenou barvou. Délka zmetkové části je
Mezní kalibry Mezními kalibry zjistíme, zda je rozměr součástky v povolených mezích, tj. v toleranci. Mají dobrou a zmetkovou stranu. Zmetková strana je označená červenou barvou. Délka zmetkové části je
Antény. Zpracoval: Ing. Jiří. Sehnal. 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén
 ANTÉNY Sehnal Zpracoval: Ing. Jiří Antény 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén Pod pojmem anténa rozumíme obecně prvek, který zprostředkuje přechod elektromagnetické
ANTÉNY Sehnal Zpracoval: Ing. Jiří Antény 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén Pod pojmem anténa rozumíme obecně prvek, který zprostředkuje přechod elektromagnetické
Výroba ozubených kol. Použití ozubených kol. Převody ozubenými koly a tvary ozubených kol
 Výroba ozubených kol Použití ozubených kol Ozubenými koly se přenášejí otáčivé pohyby a kroutící momenty. Přenos je zde nucený, protože zuby a zubní mezery do sebe zabírají. Kola mohou mít vnější nebo
Výroba ozubených kol Použití ozubených kol Ozubenými koly se přenášejí otáčivé pohyby a kroutící momenty. Přenos je zde nucený, protože zuby a zubní mezery do sebe zabírají. Kola mohou mít vnější nebo
5.2.1 Matematika povinný předmět
 5.2.1 Matematika povinný předmět Učební plán předmětu 1. ročník 2. ročník 3. ročník 6. ročník 7. ročník 8. ročník 9. ročník 4 4+1 4+1 4+1 4+1 4 4 3+1 4+1 Vzdělávací oblast Matematika a její aplikace v
5.2.1 Matematika povinný předmět Učební plán předmětu 1. ročník 2. ročník 3. ročník 6. ročník 7. ročník 8. ročník 9. ročník 4 4+1 4+1 4+1 4+1 4 4 3+1 4+1 Vzdělávací oblast Matematika a její aplikace v
Název: Osová souměrnost
 Název: Osová souměrnost Autor: Mgr. Lukáš Saulich Název školy: Gymnázium Jana Nerudy, škola hl. města Prahy Předmět, mezipředmětové vztahy: matematika a její aplikace Ročník: 3. (1. ročník vyššího gymnázia)
Název: Osová souměrnost Autor: Mgr. Lukáš Saulich Název školy: Gymnázium Jana Nerudy, škola hl. města Prahy Předmět, mezipředmětové vztahy: matematika a její aplikace Ročník: 3. (1. ročník vyššího gymnázia)
Základní škola a mateřská škola, Ostrava-Hrabůvka, Mitušova 16, příspěvková organizace Školní vzdělávací program 2. stupeň, Matematika.
 Matematika Matematika pro žáky 6. až 9. ročníku napomáhá k rozvoji paměti, logického myšlení, kritickému usuzování a srozumitelné a věcné argumentaci prostřednictvím matematických problémů. Žáci si prostřednictvím
Matematika Matematika pro žáky 6. až 9. ročníku napomáhá k rozvoji paměti, logického myšlení, kritickému usuzování a srozumitelné a věcné argumentaci prostřednictvím matematických problémů. Žáci si prostřednictvím
Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]
![Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]](/thumbs/34/13145181.jpg "Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]") Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.] 1 CÍL KAPITOLY Cílem této kapitoly je naučit uživatele efektivně navrhovat objekty v režimu
Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.] 1 CÍL KAPITOLY Cílem této kapitoly je naučit uživatele efektivně navrhovat objekty v režimu
ŠKOLNÍ VZDĚLÁVACÍ PROGRAM
 Vyučovací předmět: Období ročník: Učební texty: Matematika 2. období 4. ročník R. Blažková: Matematika pro 3. ročník ZŠ (3. díl) (Alter) R. Blažková: Matematika pro 4. ročník ZŠ (1. díl) (Alter) J. Jurtová:
Vyučovací předmět: Období ročník: Učební texty: Matematika 2. období 4. ročník R. Blažková: Matematika pro 3. ročník ZŠ (3. díl) (Alter) R. Blažková: Matematika pro 4. ročník ZŠ (1. díl) (Alter) J. Jurtová:
(3) Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)
 Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)") Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
TÉMATICKÝ PLÁN OSV. čte, zapisuje a porovnává přirozená čísla do 20, užívá a zapisuje vztah rovnosti a nerovnosti
 TÉMATICKÝ PLÁN MA 1.ročník Očekávaný výstup /dle RVP/ Žák: Konkretizace výstupu, učivo, návrh realizace výstupu PT Číslo a početní operace používá přirozená čísla k modelování reálných situací, počítá
TÉMATICKÝ PLÁN MA 1.ročník Očekávaný výstup /dle RVP/ Žák: Konkretizace výstupu, učivo, návrh realizace výstupu PT Číslo a početní operace používá přirozená čísla k modelování reálných situací, počítá
Měření momentu setrvačnosti z doby kmitu
 Úloha č. 4 Měření momentu setrvačnosti z doby kmitu Úkoly měření:. Určete moment setrvačnosti vybraných těles, kruhové a obdélníkové desky.. Stanovení momentu setrvačnosti proveďte s využitím dvou rozdílných
Úloha č. 4 Měření momentu setrvačnosti z doby kmitu Úkoly měření:. Určete moment setrvačnosti vybraných těles, kruhové a obdélníkové desky.. Stanovení momentu setrvačnosti proveďte s využitím dvou rozdílných
ŠKOLNÍ VZDĚLÁVACÍ PROGRAM
 Vyučovací předmět : Období ročník : Učební texty : Matematika 3. období 7. ročník J.Coufalová : Matematika pro 7.ročník ZŠ (Fortuna) O.Odvárko, J.Kadleček : Sbírka úloh z matematiky pro 7.ročník ZŠ (Prometheus)
Vyučovací předmět : Období ročník : Učební texty : Matematika 3. období 7. ročník J.Coufalová : Matematika pro 7.ročník ZŠ (Fortuna) O.Odvárko, J.Kadleček : Sbírka úloh z matematiky pro 7.ročník ZŠ (Prometheus)
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Nevyváženost rotorů rotačních strojů je důsledkem změny polohy (posunutí, naklonění) hlavních os setrvačnosti rotorů vzhledem
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Nevyváženost rotorů rotačních strojů je důsledkem změny polohy (posunutí, naklonění) hlavních os setrvačnosti rotorů vzhledem
TEORETICKÝ VÝKRES LODNÍHO TĚLESA
 TEORETICKÝ VÝKRES LODNÍHO TĚLESA BOKORYS (neboli NÁRYS) je jeden ze základních pohledů, ze kterého poznáváme tvar kýlu, zádě, zakřivení paluby, atd. Zobrazuje v osové rovině obrys plavidla. Uvnitř obrysu
TEORETICKÝ VÝKRES LODNÍHO TĚLESA BOKORYS (neboli NÁRYS) je jeden ze základních pohledů, ze kterého poznáváme tvar kýlu, zádě, zakřivení paluby, atd. Zobrazuje v osové rovině obrys plavidla. Uvnitř obrysu
Shodná zobrazení Zobrazení Z v rovin shodné zobrazení nep ímou shodnost shodnost p ímou
 Shodná zobrazení Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz; zapisujeme Z: X X. Zobrazení v rovině je shodné
Shodná zobrazení Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz; zapisujeme Z: X X. Zobrazení v rovině je shodné
Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA MATEMATIKY
 Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA MATEMATIKY ANALYTICKY A GEOMETRICKY DEFINOVANÉ KŘIVKY BAKALÁŘSKÁ PRÁCE Iveta Svobodová Vedoucí práce: Mgr. Lukáš Honzík Plzeň, 2012 Prohlašuji,
Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA MATEMATIKY ANALYTICKY A GEOMETRICKY DEFINOVANÉ KŘIVKY BAKALÁŘSKÁ PRÁCE Iveta Svobodová Vedoucí práce: Mgr. Lukáš Honzík Plzeň, 2012 Prohlašuji,
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018. 3. Reálná čísla
 Moderní technologie ve studiu aplikované fyziky CZ..07/..00/07.008 3. Reálná čísla RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny. K nejvýznamnějším patří množina reálných čísel,
Moderní technologie ve studiu aplikované fyziky CZ..07/..00/07.008 3. Reálná čísla RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny. K nejvýznamnějším patří množina reálných čísel,
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi
 6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
Základní škola Fr. Kupky, ul. Fr. Kupky 350, 518 01 Dobruška 5.2 MATEMATIKA A JEJÍ APLIKACE - 5.2.1 MATEMATIKA A JEJÍ APLIKACE Matematika 9.
 5.2 MATEMATIKA A JEJÍ APLIKACE 5.2.1 MATEMATIKA A JEJÍ APLIKACE Matematika 9. ročník RVP ZV Obsah RVP ZV Kód RVP ZV Očekávané výstupy ŠVP Školní očekávané výstupy ŠVP Učivo M9101 provádí početní operace
5.2 MATEMATIKA A JEJÍ APLIKACE 5.2.1 MATEMATIKA A JEJÍ APLIKACE Matematika 9. ročník RVP ZV Obsah RVP ZV Kód RVP ZV Očekávané výstupy ŠVP Školní očekávané výstupy ŠVP Učivo M9101 provádí početní operace
ŠROUBOVÉ PLOCHY. 1. Základní úlohy na šroubových plochách.
 ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
Výroba ozubených kol
 Výroba ozubených kol obrábění tvarových (evolventních) ploch vícebřitým nástrojem patří k nejnáročnějším odvětvím strojírenské výroby speciální stroje, přesné nástroje Ozubená kola součásti pohybových
Výroba ozubených kol obrábění tvarových (evolventních) ploch vícebřitým nástrojem patří k nejnáročnějším odvětvím strojírenské výroby speciální stroje, přesné nástroje Ozubená kola součásti pohybových
Po etní geometrie. Výpo et délky p epony: c 2 = a 2 + b 2 Výpo et délky odv sny: a 2 = c 2 b 2, b 2 = c 2 a 2
 Po etní geometrie Pythagorova v ta Obsah tverce nad p eponou je roven sou tu obsah tverc nad ob ma odv snami. Výpo et délky p epony: c = a + b Výpo et délky odv sny: a = c b, b = c a P íklad 1: Vypo t
Po etní geometrie Pythagorova v ta Obsah tverce nad p eponou je roven sou tu obsah tverc nad ob ma odv snami. Výpo et délky p epony: c = a + b Výpo et délky odv sny: a = c b, b = c a P íklad 1: Vypo t
Strojní součásti, konstrukční prvky a spoje
 Strojní součásti, konstrukční prvky a spoje Šroubové spoje Šrouby jsou nejčastěji používané strojní součástí a neexistuje snad stroj, kde by se nevyskytovaly. Mimo šroubů jsou u některých šroubových spojů
Strojní součásti, konstrukční prvky a spoje Šroubové spoje Šrouby jsou nejčastěji používané strojní součástí a neexistuje snad stroj, kde by se nevyskytovaly. Mimo šroubů jsou u některých šroubových spojů
Matematika. Charakteristika vyučovacího předmětu. Výchovné a vzdělávací strategie pro rozvíjení klíčových kompetencí žáků
 Vzdělávací obor: Matematika a její aplikace Matematika Obsahové, časové a organizační vymezení Charakteristika vyučovacího předmětu 1.-2. ročník 4 hodiny týdně 3.-5. ročník 5 hodin týdně Vzdělávací obsah
Vzdělávací obor: Matematika a její aplikace Matematika Obsahové, časové a organizační vymezení Charakteristika vyučovacího předmětu 1.-2. ročník 4 hodiny týdně 3.-5. ročník 5 hodin týdně Vzdělávací obsah
2.1 Pokyny k otevřeným úlohám. 2.2 Pokyny k uzavřeným úlohám TESTOVÝ SEŠIT NEOTVÍREJTE, POČKEJTE NA POKYN!
 MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro řešení didaktického testu
MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro řešení didaktického testu
Fakulta strojního inženýrství VUT v Brně Ústav konstruování. KONSTRUOVÁNÍ STROJŮ mechanismy. Přednáška 8
 Fakulta strojního inženýrství VUT v Brně Ústav konstruování KONSTRUOVÁNÍ STROJŮ mechanismy Přednáška 8 Převody s korigovanými ozubenými koly Obsah Převody s korigovanými ozubenými koly Výroba ozubení odvalováním
Fakulta strojního inženýrství VUT v Brně Ústav konstruování KONSTRUOVÁNÍ STROJŮ mechanismy Přednáška 8 Převody s korigovanými ozubenými koly Obsah Převody s korigovanými ozubenými koly Výroba ozubení odvalováním
Učební osnovy Vzdělávací oblast: Matematika a její aplikace Vzdělávací obor: Volitelný předmět Matematický seminář ročník 8.
 Učební osnovy Vzdělávací oblast: Matematika a její aplikace Vzdělávací obor: Volitelný předmět Matematický seminář ročník 8. Výuka matematického semináře bude probíhat jednou týdně v dvouhodinovém bloku.
Učební osnovy Vzdělávací oblast: Matematika a její aplikace Vzdělávací obor: Volitelný předmět Matematický seminář ročník 8. Výuka matematického semináře bude probíhat jednou týdně v dvouhodinovém bloku.
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací.
 jako náprava hnací.") 1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
5.1.6 Vzájemná poloha dvou přímek
 5.1.6 Vzájemná oloha dvou římek Předoklady: 5105 Planimetrie: dvě možností ro vzájemnou olohu římek různoběžky rávě jeden solečný bod (různý směr) rovnoběžky žádný solečný bod (stejný směr) Př. 1: Najdi
5.1.6 Vzájemná oloha dvou římek Předoklady: 5105 Planimetrie: dvě možností ro vzájemnou olohu římek různoběžky rávě jeden solečný bod (různý směr) rovnoběžky žádný solečný bod (stejný směr) Př. 1: Najdi
- 1 - Vzdělávací oblast : matematika a její aplikace Vyučovací předmět : : matematika Ročník: 3.
 - 1 - Vzdělávací oblast : matematika a její aplikace Vyučovací předmět : : matematika Ročník: 3. ČÍSLO A POČETNÍ OPERACE Výstup Učivo Průřezová témata Mezipředmětové vztahy Zápis čísel. Čtení a zápisy
- 1 - Vzdělávací oblast : matematika a její aplikace Vyučovací předmět : : matematika Ročník: 3. ČÍSLO A POČETNÍ OPERACE Výstup Učivo Průřezová témata Mezipředmětové vztahy Zápis čísel. Čtení a zápisy
TECHNICKÁ DOKUMENTACE NA PC
 TECHNICKÁ DOKUMENTACE NA PC Vypracovala: Jitka Chocholoušková 1 Obsah: 1. Uživatelské prostředí... 4 2. Tvorba objektů... 7 3. Tvorba úsečky... 10 4. Tvorba kružnice a oblouku... 15 4.1. Tvorba kružnice...
TECHNICKÁ DOKUMENTACE NA PC Vypracovala: Jitka Chocholoušková 1 Obsah: 1. Uživatelské prostředí... 4 2. Tvorba objektů... 7 3. Tvorba úsečky... 10 4. Tvorba kružnice a oblouku... 15 4.1. Tvorba kružnice...
Měření základních vlastností OZ
 Měření základních vlastností OZ. Zadání: A. Na operačním zesilovači typu MAA 74 a MAC 55 změřte: a) Vstupní zbytkové napětí U D0 b) Amplitudovou frekvenční charakteristiku napěťového přenosu OZ v invertujícím
Měření základních vlastností OZ. Zadání: A. Na operačním zesilovači typu MAA 74 a MAC 55 změřte: a) Vstupní zbytkové napětí U D0 b) Amplitudovou frekvenční charakteristiku napěťového přenosu OZ v invertujícím
2.1 Pokyny k otevřeným úlohám. 2.2 Pokyny k uzavřeným úlohám TESTOVÝ SEŠIT NEOTVÍREJTE, POČKEJTE NA POKYN!
 MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro řešení didaktického testu
MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro řešení didaktického testu
Tematický plán pro školní rok 2015/16 Předmět: Matematika Vyučující: Mgr. Iveta Jedličková Týdenní dotace hodin: 5 hodin Ročník: pátý
 ČASOVÉ OBDOBÍ Září Říjen KONKRÉTNÍ VÝSTUPY KONKRÉTNÍ UČIVO PRŮŘEZOVÁ TÉMATA Umí zapsat a přečíst čísla do 1 000 000 Porovnává čísla do 1 000 000 Zaokrouhluje čísla na tisíce, desetitisíce, statisíce Umí
ČASOVÉ OBDOBÍ Září Říjen KONKRÉTNÍ VÝSTUPY KONKRÉTNÍ UČIVO PRŮŘEZOVÁ TÉMATA Umí zapsat a přečíst čísla do 1 000 000 Porovnává čísla do 1 000 000 Zaokrouhluje čísla na tisíce, desetitisíce, statisíce Umí
LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM
 LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM 1 Úvod V roce 2012 byla v rámci projektu TA02011322 Prostorové konstrukce podepřené kabely a/nebo oblouky řešena statická analýza návrhu visuté lanové střechy nad
LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM 1 Úvod V roce 2012 byla v rámci projektu TA02011322 Prostorové konstrukce podepřené kabely a/nebo oblouky řešena statická analýza návrhu visuté lanové střechy nad
Definice tolerování. Technická dokumentace Ing. Lukáš Procházka
 Technická dokumentace Ing. Lukáš Procházka Téma: geometrické tolerance 1) Definice geometrických tolerancí 2) Všeobecné geometrické tolerance 3) Základny geometrických tolerancí 4) Druhy geometrických
Technická dokumentace Ing. Lukáš Procházka Téma: geometrické tolerance 1) Definice geometrických tolerancí 2) Všeobecné geometrické tolerance 3) Základny geometrických tolerancí 4) Druhy geometrických
Vyhrubování a vystružování válcových otvorů
 Vyhrubování a vystružování válcových otvorů Vyhrubováním se dosáhne nejen hladších povrchů otvorů, ale i jejich přesnějších rozměrů a správnějších geometrických tvarů než při vrtání. Vyhrubování je rozšiřování
Vyhrubování a vystružování válcových otvorů Vyhrubováním se dosáhne nejen hladších povrchů otvorů, ale i jejich přesnějších rozměrů a správnějších geometrických tvarů než při vrtání. Vyhrubování je rozšiřování
Školní vzdělávací program pro základní vzdělávání - VLNKA Učební osnovy / Matematika a její aplikace / M
 I. název vzdělávacího oboru: MATEMATIKA (M) II. charakteristika vzdělávacího oboru: a) organizace: Vzdělávací obsah vzdělávacího oboru Matematika je realizován ve všech ročnících základního vzdělávání.
I. název vzdělávacího oboru: MATEMATIKA (M) II. charakteristika vzdělávacího oboru: a) organizace: Vzdělávací obsah vzdělávacího oboru Matematika je realizován ve všech ročnících základního vzdělávání.
ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ
 ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ Pozemkem se podle 2 písm. a) katastrálního zákona rozumí část zemského povrchu, a to část taková, která je od sousedních částí zemského povrchu (sousedních pozemků)
ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ Pozemkem se podle 2 písm. a) katastrálního zákona rozumí část zemského povrchu, a to část taková, která je od sousedních částí zemského povrchu (sousedních pozemků)
Téma 9 Těžiště Těžiště rovinných čar Těžiště jednoduchých rovinných obrazců Těžiště složených rovinných obrazců
 Stvení sttik, 1.ročník klářského studi Tém 9 Těžiště Těžiště rovinných čr Těžiště jednoduchých rovinných orců Těžiště složených rovinných orců Ktedr stvení mechniky Fkult stvení, VŠB - Technická univerit
Stvení sttik, 1.ročník klářského studi Tém 9 Těžiště Těžiště rovinných čr Těžiště jednoduchých rovinných orců Těžiště složených rovinných orců Ktedr stvení mechniky Fkult stvení, VŠB - Technická univerit
SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G
 4. ročník bakalářského studia studijní program G studijní obor G") SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 1O POLOHOVÉ VYTYČOVÁNÍ Pod pojem polohového vytyčování se
SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 1O POLOHOVÉ VYTYČOVÁNÍ Pod pojem polohového vytyčování se
Příprava na 1. čtvrtletní písemku pro třídu 1EB
 Variace 1 Příprava na 1. čtvrtletní písemku pro třídu 1EB Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Číselné
Variace 1 Příprava na 1. čtvrtletní písemku pro třídu 1EB Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Číselné
TECHNICKÉ ODSTŘELY A JEJICH ÚČINKY
 TECHNICKÉ ODSTŘELY A JEJICH ÚČINKY Přednáška č.7 Demolici stavebních objektů lze provést: Inovace studijního oboru Geotechnika 7. Přednáška Trhací práce při destrukcích a) ručně (rozebírání objektu ruční
TECHNICKÉ ODSTŘELY A JEJICH ÚČINKY Přednáška č.7 Demolici stavebních objektů lze provést: Inovace studijního oboru Geotechnika 7. Přednáška Trhací práce při destrukcích a) ručně (rozebírání objektu ruční
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Anemometrické metody Učební text Ing. Bc. Michal Malík Ing. Bc. Jiří Primas Liberec 2011 Materiál vznikl v rámci
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Anemometrické metody Učební text Ing. Bc. Michal Malík Ing. Bc. Jiří Primas Liberec 2011 Materiál vznikl v rámci
4.5.1 Magnety, magnetické pole
 4.5.1 Magnety, magnetické pole Předpoklady: 4101 Pomůcky: magnety, kancelářské sponky, papír, dřevěná dýha, hliníková kulička, měděná kulička (drát), železné piliny, papír, jehla (špendlík), korek (kus
4.5.1 Magnety, magnetické pole Předpoklady: 4101 Pomůcky: magnety, kancelářské sponky, papír, dřevěná dýha, hliníková kulička, měděná kulička (drát), železné piliny, papír, jehla (špendlík), korek (kus
Diamantová suma - řešení příkladů 1.kola
 Diamantová suma - řešení příladů.ola. Doažte, že pro aždé přirozené číslo n platí.n + 2.n + + n.n < 2. Postupujeme matematicou inducí. Levou stranu nerovnosti označme s n. Nejmenší n, pro než má smysl
Diamantová suma - řešení příladů.ola. Doažte, že pro aždé přirozené číslo n platí.n + 2.n + + n.n < 2. Postupujeme matematicou inducí. Levou stranu nerovnosti označme s n. Nejmenší n, pro než má smysl
ZÁPISKY Z ANALYTICKÉ GEOMETRIE 1 SOUŘADNICE, BODY
 1 Souřadnice, body 1.1 Prostor prostor můžeme chápat jako nějaké prostředí, ve kterém můžeme mít různé věci na různých místech místo, poloha - tohle potřebujeme nějak popsat abychom mohli změřit nebo říci,
1 Souřadnice, body 1.1 Prostor prostor můžeme chápat jako nějaké prostředí, ve kterém můžeme mít různé věci na různých místech místo, poloha - tohle potřebujeme nějak popsat abychom mohli změřit nebo říci,
L A B O R A T O R N Í C V I Č E N Í Z F Y Z I K Y
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE KATEDRA FYZIKY L A B O R A T O R N Í C V I Č E N Í Z F Y Z I K Y Jméno TUREČEK Daniel Datum měření 3..6 Stud. rok 6/7 Ročník. Datum odevzdání 3..7 Stud. skupina 3 Lab.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE KATEDRA FYZIKY L A B O R A T O R N Í C V I Č E N Í Z F Y Z I K Y Jméno TUREČEK Daniel Datum měření 3..6 Stud. rok 6/7 Ročník. Datum odevzdání 3..7 Stud. skupina 3 Lab.
Státní maturita 2011 Maturitní testy a zadání jaro 2011 Matematika: didaktický test - základní úrove obtíºnosti MAMZD11C0T02 e²ené p íklady
 Státní maturita 0 Maturitní testy a zadání jaro 0 Matematika: didaktický test - základní úrove obtíºnosti MAMZDC0T0 e²ené p íklady Autor e²ení: Jitka Vachtová 0. srpna 0 http://www.vachtova.cz/ Obsah Úloha
Státní maturita 0 Maturitní testy a zadání jaro 0 Matematika: didaktický test - základní úrove obtíºnosti MAMZDC0T0 e²ené p íklady Autor e²ení: Jitka Vachtová 0. srpna 0 http://www.vachtova.cz/ Obsah Úloha
SPOJE ŠROUBOVÉ. Mezi nejdůleţitější geometrické charakteristiky závitů patří tyto veličiny:
 SPOJE ŠROUBOVÉ Šroubové spoje patří mezi nejstarší a nejpoužívanější rozebíratelné spoje se silovým stykem. Všechny spojovací součástky šroubových i ostatních rozebíratelných spojů jsou normalizované.
SPOJE ŠROUBOVÉ Šroubové spoje patří mezi nejstarší a nejpoužívanější rozebíratelné spoje se silovým stykem. Všechny spojovací součástky šroubových i ostatních rozebíratelných spojů jsou normalizované.
1.2.5 Reálná čísla I. Předpoklady: 010204
 .2.5 Reálná čísla I Předpoklady: 00204 Značíme R. Reálná čísla jsou čísla, kterými se vyjadřují délky úseček, čísla jim opačná a 0. Každé reálné číslo je na číselné ose znázorněno právě jedním bodem. Každý
.2.5 Reálná čísla I Předpoklady: 00204 Značíme R. Reálná čísla jsou čísla, kterými se vyjadřují délky úseček, čísla jim opačná a 0. Každé reálné číslo je na číselné ose znázorněno právě jedním bodem. Každý
Výukový materiál zpracován v rámci projektu EU peníze školám
 Výukový materiál zpracován v rámci projektu EU peníze školám Registrační číslo projektu: CZ.1.07/1.4.00/21.3476 Název materiálu: VY_42_INOVACE_181 Vzdělávací oblast: Matematika a její aplikace Vzdělávací
Výukový materiál zpracován v rámci projektu EU peníze školám Registrační číslo projektu: CZ.1.07/1.4.00/21.3476 Název materiálu: VY_42_INOVACE_181 Vzdělávací oblast: Matematika a její aplikace Vzdělávací
STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA
 STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA ÚVOD Při válcování za studena je povrch vyválcovaného plechu znečištěn oleji či emulzemi, popř. dalšími nečistotami. Nežádoucí
STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA ÚVOD Při válcování za studena je povrch vyválcovaného plechu znečištěn oleji či emulzemi, popř. dalšími nečistotami. Nežádoucí
Algoritmizace a programování
 Algoritmizace a programování V algoritmizaci a programování je důležitá schopnost analyzovat a myslet. Všeobecně jsou odrazovým můstkem pro řešení neobvyklých, ale i každodenních problémů. Naučí nás rozdělit
Algoritmizace a programování V algoritmizaci a programování je důležitá schopnost analyzovat a myslet. Všeobecně jsou odrazovým můstkem pro řešení neobvyklých, ale i každodenních problémů. Naučí nás rozdělit
ŠVP - učební osnovy - Vzdělání pro život - rozšířená výuka matematiky, přírodovědných předmětů a informatiky
 1 Učební osnovy 1.1 Matematika a její aplikace Vzdělávací oblast Matematika a její aplikace v základním vzdělávání je založena především na aktivních činnostech, které jsou typické pro práci s matematickými
1 Učební osnovy 1.1 Matematika a její aplikace Vzdělávací oblast Matematika a její aplikace v základním vzdělávání je založena především na aktivních činnostech, které jsou typické pro práci s matematickými
Dů kazové úlohy. Jiří Vaníček
 Dů kazové úlohy Jiří Vaníček Následující série ú loh je koncipována tak, ž e student nejprve podle předem daného konstrukčního postupu sestrojí konstrukci a v ní podle návodu objeví některý nový poznatek.
Dů kazové úlohy Jiří Vaníček Následující série ú loh je koncipována tak, ž e student nejprve podle předem daného konstrukčního postupu sestrojí konstrukci a v ní podle návodu objeví některý nový poznatek.
Hoblíky s nízkým úhlem (výbrusem nahoru)
") Hoblíky s nízkým úhlem (výbrusem nahoru) Hoblíky s nízkým úhlem Veritas, jsou univerzálními a účelnými pomocníky pro práci se dřevem. Uložení želízka výbrusem směrem nahoru (bevel up) umožňuje měnit úhel
Hoblíky s nízkým úhlem (výbrusem nahoru) Hoblíky s nízkým úhlem Veritas, jsou univerzálními a účelnými pomocníky pro práci se dřevem. Uložení želízka výbrusem směrem nahoru (bevel up) umožňuje měnit úhel
Geometrická optika 1
 Geometrická optika 1 Popis pomocí světelných paprsků těmi se šíří energie a informace, zanedbává vlnové vlastnosti světla světelný paprsek = přímka, podél níž se šíří světlo, jeho energie index lomu (základní
Geometrická optika 1 Popis pomocí světelných paprsků těmi se šíří energie a informace, zanedbává vlnové vlastnosti světla světelný paprsek = přímka, podél níž se šíří světlo, jeho energie index lomu (základní
Základní prvky a všeobecná lyžařská průprava
 Základní prvky a všeobecná lyžařská průprava Základní prvky a všeobecná lyžařská průprava na běžeckých lyžích Základními prvky nazýváme prvky elementární přípravy a pohybových dovedností, jejichž zvládnutí
Základní prvky a všeobecná lyžařská průprava Základní prvky a všeobecná lyžařská průprava na běžeckých lyžích Základními prvky nazýváme prvky elementární přípravy a pohybových dovedností, jejichž zvládnutí
Válec - slovní úlohy
 Válec - slovní úlohy VY_32_INOVACE_M-Ge. 7., 8. 20 Anotace: Žák řeší slovní úlohy z praxe. Využívá k řešení matematický aparát. Vzdělávací oblast: Matematika Autor: Mgr. Robert Kecskés Jazyk: Český Očekávaný
Válec - slovní úlohy VY_32_INOVACE_M-Ge. 7., 8. 20 Anotace: Žák řeší slovní úlohy z praxe. Využívá k řešení matematický aparát. Vzdělávací oblast: Matematika Autor: Mgr. Robert Kecskés Jazyk: Český Očekávaný
Matematický model kamery v afinním prostoru
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Matematický model kamery v afinním prostoru (Verze 1.0.1) Jan Šochman, Tomáš Pajdla sochmj1@cmp.felk.cvut.cz, pajdla@cmp.felk.cvut.cz CTU CMP 2002
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Matematický model kamery v afinním prostoru (Verze 1.0.1) Jan Šochman, Tomáš Pajdla sochmj1@cmp.felk.cvut.cz, pajdla@cmp.felk.cvut.cz CTU CMP 2002
Oblastní stavební bytové družstvo, Jeronýmova 425/15, Děčín IV
 Oblastní stavební bytové družstvo, Jeronýmova 425/15, Děčín IV Směrnice pro vyúčtování služeb spojených s bydlením Platnost směrnice: - tato směrnice je platná pro městské byty ve správě OSBD, Děčín IV
Oblastní stavební bytové družstvo, Jeronýmova 425/15, Děčín IV Směrnice pro vyúčtování služeb spojených s bydlením Platnost směrnice: - tato směrnice je platná pro městské byty ve správě OSBD, Děčín IV
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.2.3. Valivá ložiska Ložiska slouží k otočnému nebo posuvnému uložení strojních součástí a k přenosu působících
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.2.3. Valivá ložiska Ložiska slouží k otočnému nebo posuvnému uložení strojních součástí a k přenosu působících
a m1 a m2 a mn zobrazení. Operaci násobení u matic budeme definovat jiným způsobem.
 1 Matice Definice 1 Matice A typu (m, n) je zobrazení z kartézského součinu {1, 2,,m} {1, 2,,n} do množiny R Matici A obvykle zapisujeme takto: a 1n a 21 a 22 a 2n A =, a m1 a m2 a mn kde a ij R jsou její
1 Matice Definice 1 Matice A typu (m, n) je zobrazení z kartézského součinu {1, 2,,m} {1, 2,,n} do množiny R Matici A obvykle zapisujeme takto: a 1n a 21 a 22 a 2n A =, a m1 a m2 a mn kde a ij R jsou její
BRICSCAD V13. Přímé modelování
 BRICSCAD V13 Přímé modelování Protea spol. s r.o. Makovského 1339/16 236 00 Praha 6 - Řepy tel.: 235 316 232, 235 316 237 fax: 235 316 038 e-mail: obchod@protea.cz web: www.protea.cz Copyright Protea spol.
BRICSCAD V13 Přímé modelování Protea spol. s r.o. Makovského 1339/16 236 00 Praha 6 - Řepy tel.: 235 316 232, 235 316 237 fax: 235 316 038 e-mail: obchod@protea.cz web: www.protea.cz Copyright Protea spol.
( ) Úloha č. 9. Měření rychlosti zvuku a Poissonovy konstanty
 Úloha č. 9. Měření rychlosti zvuku a Poissonovy konstanty") Fyzikální praktikum IV. Měření ryhlosti zvuku a Poissonovy konstanty - verze Úloha č. 9 Měření ryhlosti zvuku a Poissonovy konstanty 1) Pomůky: Kundtova trubie, mikrofon se sondou, milivoltmetr, měřítko,
Fyzikální praktikum IV. Měření ryhlosti zvuku a Poissonovy konstanty - verze Úloha č. 9 Měření ryhlosti zvuku a Poissonovy konstanty 1) Pomůky: Kundtova trubie, mikrofon se sondou, milivoltmetr, měřítko,
Pánský salón. Má salón, čas a nikdo ho nezastaví. Originál. Zkonstruování simulátoru běhu v lese. 2. Buben pro běh lesem 3.
 Pánský salón Má salón, čas a nikdo ho nezastaví. Originál Zkonstruování simulátoru běhu v lese. Buben pro běh lesem. Fotoroleta. Agregát vydávající vůni. Podstavec. Podstavec Stěnový prvek (překližka,
Pánský salón Má salón, čas a nikdo ho nezastaví. Originál Zkonstruování simulátoru běhu v lese. Buben pro běh lesem. Fotoroleta. Agregát vydávající vůni. Podstavec. Podstavec Stěnový prvek (překližka,
Téma, učivo Rozvíjené kompetence, očekávané výstupy Mezipředmětové vztahy Opakování učiva 2. ročníku Sčítání a odčítání oboru do 100
 VZDĚLÁVACÍ OBLAST: VZDĚLÁVACÍ OBOR: PŘEDMĚT: MATEMATIKA A JEJÍ APLIKACE MATEMATIKA MATEMATIKA 3. ROČNÍK Téma, učivo Rozvíjené kompetence, očekávané výstupy Mezipředmětové vztahy Opakování učiva 2. ročníku
VZDĚLÁVACÍ OBLAST: VZDĚLÁVACÍ OBOR: PŘEDMĚT: MATEMATIKA A JEJÍ APLIKACE MATEMATIKA MATEMATIKA 3. ROČNÍK Téma, učivo Rozvíjené kompetence, očekávané výstupy Mezipředmětové vztahy Opakování učiva 2. ročníku
5 Navrhování vyztužených zděných prvků
 5 Navrhování vyztužených zděných prvků 5.1 Úvod Při navrhování konstrukcí z nevyztuženého zdiva se často dostáváme do situace, kdy zděný konstrukční prvek (stěna, pilíř) je namáhán zatížením, vyvolávajícím
5 Navrhování vyztužených zděných prvků 5.1 Úvod Při navrhování konstrukcí z nevyztuženého zdiva se často dostáváme do situace, kdy zděný konstrukční prvek (stěna, pilíř) je namáhán zatížením, vyvolávajícím
Seznámení s možnostmi Autodesk Inventoru 2012
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Žáci mají k dispozici pracovní list. Formou kolektivní diskuze a výkladu si osvojí grafickou minimalizaci zápisu logické funkce
 Číslo projektu Číslo materiálu Název školy Autor Název Téma hodiny Předmět Ročník /y/ CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_9_ČT_1.09_ grafická minimalizace Střední odborná škola a Střední odborné učiliště,
Číslo projektu Číslo materiálu Název školy Autor Název Téma hodiny Předmět Ročník /y/ CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_9_ČT_1.09_ grafická minimalizace Střední odborná škola a Střední odborné učiliště,
ASYNCHRONNÍ STROJ. Trojfázové asynchronní stroje. n s = 60.f. Ing. M. Bešta
 Trojfázové asynchronní stroje Trojfázové asynchronní stroje někdy nazývané indukční se většinou provozují v motorickém režimu tzn. jako asynchronní motory (zkratka ASM). Jsou to konstrukčně nejjednodušší
Trojfázové asynchronní stroje Trojfázové asynchronní stroje někdy nazývané indukční se většinou provozují v motorickém režimu tzn. jako asynchronní motory (zkratka ASM). Jsou to konstrukčně nejjednodušší
Průvodní dokumentace IP-420
 Průvodní dokumentace IP-420 I&TS, spol. s r.o. Havlíčkova 215 280 02 Kolín4 tel: +420-321-723555 e-mail: info@iats.cz http://www.iats.cz 1 TECHNICKÉ PODMÍNKY... 2 1.1 ÚVOD... 2 1.2 VŠEOBECNĚ... 2 1.2.1
Průvodní dokumentace IP-420 I&TS, spol. s r.o. Havlíčkova 215 280 02 Kolín4 tel: +420-321-723555 e-mail: info@iats.cz http://www.iats.cz 1 TECHNICKÉ PODMÍNKY... 2 1.1 ÚVOD... 2 1.2 VŠEOBECNĚ... 2 1.2.1