Modelování fyzikálních dějů numerickými metodami
|
|
|
- Renata Vlčková
- před 8 lety
- Počet zobrazení:
Transkript
1 Modelování fyzikálních dějů numerickými metodami Studijní text pro řešitele FO a ostatní zájemce o fyziku Přemysl Šedivý Obsah 1 Modelování pohybu hmotného bodu Pohybovérovniceajejichřešení Analytickámetoda Numerickámetoda Elementární metody numerického řešení pohybových rovnic Porovnání modelů vytvořených elementárními metodami s přesnýmřešenímpohybovýchrovnic Přesnějšímetody ZlepšenímetodyRAV metodafeynmanova UpravenámetodaARV MetodyRungovy Kuttovy Další typy úloh Úlohy,kterévedounadiferenciálnírovnici1.řádu Úlohy, které vedou na soustavu diferenciálních rovnic 1. řádu. 30 Přílohy 34 PřílohaA.DemoverzeprogramuCoach5.Instalaceaprvníkroky.. 34 Příloha B. Stručné poznámky o syntaxi programovacího jazyka Coach Příloha C. Odvození koeficientů Rungovy Kuttovy metody 2. řádu pro modelování dějů popsaných diferenciální rovnicí 1. řádu a počátečnípodmínkou Příloha D. Odvození kombinačních koeficienfů pro Rungovu Kuttovu metodu 2. řádu pro modelování pohybu hmotného bodu popsanéhopohybovourovnicíapočátečnímipodmínkami Literatura 40

2 Úvod V tomto studijním textu se budeme zabývat tvorbou dynamických modelů reálných dějů, které formou tabulek a grafů vyjadřují, jak se při daném ději mění vlastnosti studovaného objektu v závislosti na čase. Matematický model je vždy zjednodušeným zobrazením skutečnosti, neboť nikdy nemůže zohlednit všechny okolnosti děje. Aplikací dynamických fyzikálních zákonů na určitou situaci dostáváme obvykle rovnice, které vystihují změny fyzikálních veličin v krátkém časovém intervalu. Například při modelování pohybu planety v radiálním gravitačním poli Slunce dovedeme z gravitačního zákona určit gravitační sílu, která v daném místě působí na planetu a její okamžité zrychlení. Z okamžitého zrychlení, okamžité rychlosti a okamžité polohy pak snadno vypočítáme polohu a rychlost planety po uplynutí krátké doby, během které se gravitační síla prakticky nezměnila. Rovnice odvozené z dynamických zákonů nemusí mít analytické řešení, které by vyjadřovalo sledované fyzikální veličiny jako funkce času, nebo je toto řešení přílišobtížnéanevímesisnímrady.vtakovémpřípaděmusímepřistoupitkřešení numerickému, které spočívá v mnohonásobném postupném počítání změn sledovaných veličin v krátkých časových intervalech s přihlédnutím k tomu, jak tyto změny ovlivňují podmínky úlohy. Takovýto výpočet ovšem nebudeme dělat ručně na kalkulačce, ale svěříme ho osobnímu počítači. Jako vhodný software se na prvním místě nabízí tabulkový kalkulátor EXCEL nebo volně dostupný OpenOffice Calc. Pro usnadnění práce byly vyvinuty různé programovací prostředky, které usnadňují rutinní práce spojené s přípravou programu a s vytvářením tabulek nebo grafů, takže uživatel se může plně soustředit na řešení fyzikálního problému.unásjetozejménavýbornývýpočetnísystémfamulus3.5l.dvořákaakol.,kterývzniklnamffukvprazeanaškolybylrozšiřovánfirmou FAMULUS Etc. Ten jsme před časem využili při přípravě studijního textu[10]. Instalace programu Famulus 3.5 byla uvolněna a lze si ji stáhnout na adrese Famulus byl vyvinut pro operační systém MS DOS a na novějších počítačích s jeho použitím mohou být potíže. Proto v tomto studijním textu budeme pracovat s modernějším a uživatelsky velmi příjemným výpočetním prostředím, které je součástí softwaru k experimentálnímu a výpočetnímu systému Coach 5 holandskéfirmycma 1.Modelyumožňujevytvářetidemoverzetohotoprogramu, která je volně dostupná na webu Demoverze je také spolu s tímto studijním textem umístěna na webových strán- 1 DistribucisystémuCoachvČRzajišťujefirmaPepekoConsultantsLiberec 2

3 kách FO( Instalace demoverze a její použití pro tvorbu nových modelů je popsáno v příloze A. Za zmínku určitě stojí i portugalský modelovací systém MODELLUS 2.5, kterýjevolněšiřitelnýamůžetesijejstáhnoutvčeskéverzizestránek Přesnost matematického modelu fyzikálního děje a rychlost výpočtu jsou značně závislé na použité numerické metodě. I nejjednodušší z těchto metod, které vyžadují jen základní znalosti programování, poskytují při řešení dynamických úloh výsledky, které dobře vystihují průběhy reálných dějů a umožňují jejich grafické modelování. V tomto studijním textu použijeme vedle jednoduché Eulerovy metody modelování i přesnější metody Rungovy-Kuttovy. Jejich přesnost a rychlost výpočtu porovnáme na modelech některých jednoduchých pohybů. Jsou to: volný pád s odporem prostředí, netlumené mechanické kmity a pohyb družice v radiálnímgravitačnímpoli.dálesevtextusetkámesedvěmamodelydějůvelektrických obvodech a jedním modelem z hydrodynamiky. Narazíte i na úlohy k samostatnému řešení. VšechnyukázkybylypřipravenyvsystémuCoach5,jennazačátkujepro srovnání jeden model vytvořený také v Excelu. Na stránkách FO jsou všechny modelyztohototextuaještěněkterédalšíuloženyvzipumodely.vpřílozea jepopsáno,jakseknimmůžemedostatpospuštěnídemoverzecoach5. 3

4 1 Modelování pohybu hmotného bodu 1.1 Pohybové rovnice a jejich řešení Aplikací druhého pohybového zákona ve tvaru F= ma=m d2 r dt 2 na konkrétní případ pohybu hmotného bodu v inerciální vztažné soustavě dostáváme pohybovou rovnici tohoto pohybu. Síla, která působí na hmotný bod, semůžeobecněměnitvzávislostinačase,napolozehmotnéhoboduanajeho rychlosti. Při řešení fyzikálních úloh se nejčastěji setkáme s těmito typy sil: 1. síla tíhová v homogenním tíhovém poli F= mg, 2. síla gravitační v radiálním gravitačním poli centrálního tělesa s velkou hmotností M F= κ Mm r 3 r, (Počátek vztažné soustavy volíme ve středu centrálního tělesa.) 3. síla elastická při vychýlení hmotného bodu z rovnovážné polohy F= kr. (Počátek vztažné soustavy volíme v rovnovážné poloze hmotného bodu.) K těmto konzervativním silám pak přistupují různé disipativní síly. Zvláště: 4. síla odporu viskózního prostředí při pomalých pohybech F= kηlv= Bv, (Stokesůvvzorec) 5. síla vírového odporu prostředí při rychlejších pohybech F= 1 CSρvv= Kvv. (Newtonůvvzorec) 2 Z časově proměnných sil uveďme alespoň 6. harmonicky se měnící sílu F= F m sinωt, se kterou se setkáme při studiu nucených kmitů. 4

5 Rozepsáním pohybové rovnice na jednotlivé složky dostaneme pro pohyb v trojrozměrném prostoru tři rovnice ma x = m d2 x dt 2 = F x= F x (t,x,y,z,v x,v y,v z ), ma y = m d2 y dt 2 = F y= F y (t,x,y,z,v x,v y,v z ), ma z = m d2 z dt 2 = F z= F z (t,x,y,z,v x,v y,v z ). Ve speciálních případech pohybu po přímce nebo pohybu v rovině můžeme při vhodné volbě vztažné soustavy zredukovat počet rovnic na jednu nebo dvě. Další zjednodušení nastane, pokud síla závisí jen na některém z uvedených parametrů, nebo je konstantní. Známe-li počáteční polohu hmotného bodu, jeho počáteční rychlost a pohybovou rovnici, můžeme určit průběh pohybu, tj. stanovit, jak závisí poloha hmotného bodu a jeho okamžitá rychlost na čase. Při modelování pohybu hmotnéhobodujdeoto,abychomkurčitéposloupnostičasů {t i }stanovili posloupnostpříslušnýchpolohovýchvektorů {r(t i )},případněiposloupnost okamžitýchrychlostí {v(t i )}.Získanéposloupnostipakdálevyužívámepřigrafickém znázornění pohybu, kdy buď zobrazujeme v určitém měřítku vztažnou soustavu a jednotlivé polohy hmotného bodu, nebo sestrojujeme grafy znázorňující, jak se mění v závislosti na čase souřadnice polohového vektoru, případně i vektorů rychlosti a zrychlení, nebo jejich velikosti. Posloupnost {t i }volímenejčastějijakoposloupnostaritmetickouskonstantním časovým krokem h=t i+1 t i. Naznačený úkol můžeme řešit na počítači dvěma metodami, analytickou nebo numerickou Analytická metoda Analytická metoda spočívá v tom, že nejprve vyřešíme pohybovou rovnici pomocí prostředků matematické analýzy, tj. nalezneme explicitní funkce r = r(t), v = v(t), které jsou řešením pohybové rovnice, a postupným dosazováním členů zposloupnosti {t i }dofunkčníchvzorcůvypočítámejednotlivéčlenyposloupností {r(t i )}, {v(t i )}. Analytická metoda je náročná na matematické znalosti a na střední škole ji využijeme jen v nejjednodušších případech. Předností analytické metody je, že při ní nacházíme vztahy, pomocí kterých můžeme z počátečních podmínek a koeficientů pohybové rovnice určit různé vlastnosti trajektorie, dobu trvání děje, případně jeho periodu. Můžeme například určit dálku a dobu vrhu, dobu oběhu a velikosti poloos trajektorie při pohybu družice, amplitudu a periodu 5

6 kmitů oscilátoru aj. To umožňuje na rozdíl od numerických metod předem volit počáteční podmínky tak, aby průběh děje měl určité požadované vlastnosti. zadání pohybové rovnice a počátečních podmínek analytické řešení pohybové rovnice postupný numerický výpočet členůposloupností {r i }, {v i } výpočet členů psloupností {r(t i )}, {v(t i )} grafické zpracování grafické zpracování Porovnání analytické a numerické metody řešení pohybové rovnice Numerická metoda Numerické metody přibližného řešení pohybových rovnic s danými počátečními podmínkami jsou založeny na použití rekurentních vzorců vyjadřujících pomocí funkce a=a(t, v, r) conejpřesnějivztahymezisousednímičlenyposloupností {r(t i )}a{v(t i )}. Cílem numerického řešení je nalezení posloupností {r i }=r 0, r 1, r 2, r 3,..., {v i }=v 0, v 1, v 2, v 3,..., které by se co nejvíce přibližovaly k přesnému řešení úlohy, tj. k posloupnostem {r(t i )}, {v(t i )}získanýmanalytickýmřešenímúlohy. Velkou výhodou numerických přibližných metod řešení pohybových rovnic je jejich univerzálnost, tedy nezávislost početního postupu na typu funkce a = a(t, v, r). Jednoduché i složitější pohybové úlohy řešíme stejným způsobem bez znalostí matematické analýzy. Existuje velké množství metod numerického řešení pohybových rovnic, které se liší svou složitostí a přesností. U všech platí, že chyba metody výpočtu se zmenšuje při zmenšování časového kroku h. K ní však při výpočtu na počítači přistupuje chyba zaokrouhlovací daná přesností zobrazení čísel v počítači ta naopak při zmenšování h roste. 6
")
7 1.2 Elementární metody numerického řešení pohybových rovnic Spolu s pohybovou rovnicí upravenou na tvar a= F(t, v, r) m = a(t, v, r) (1) budemepřivytvářeníposloupností {v i }, {r i }elementárnímimetodamipoužívat rekurentní vztahy v i+1 = v i + ah, (2) r i+1 = r i + vh, (3) t i+1 = t i + h. (4) Vycházíme z definičních vztahů v a= lim t 0 t, Znichplyneprodostatečněmalé t=h v ah, r v= lim t 0 t. r vh. Vztahy(1) až(4) musíme při numerickém výpočtu opakovaně použít v určitém předem zvoleném pořadí, přičemž(1) musí předcházet(2) a vztah(4) obvykle řadíme jako poslední. Máme tedy tři možnosti uspořádání výpočtu, které podle pořadí kroků v programovém cyklu označíme zkratkami ARV, AVR arav(a...výpočetzrychlení,v...výpočetzměnyrychlosti,r...výpočet změny polohy). Postup výpočtu při použití jednotlivých metod je přehledně zapsán v následující tabulce: ARV AVR RAV a i = a(t i, v i, r i ) a i = a(t i, v i, r i ) r i+1 = r i + v i h r i+1 = r i + v i h v i+1 = v i + a i h a=a(t i, v i, r i+1 ) v i+1 = v i + a i h r i+1 = r i + v i+1 h v i+1 = v i + ah t i+1 = t i + h t i+1 = t i + h t i+1 = t i + h MetodyARVaRAVseliší,pouzekdyžzrychleníhmotnéhoboduzávisína jeho poloze. Například při studiu pohybu v homogenním tíhovém poli dávají obě metody stejný výsledek. Takovéto jednoduché metody výpočtu bývají v učebnicích numerické matematikyobykleoznačoványjako Eulerovametoda. 7
 až(4) musíme při numerickém výpočtu opakovaně použít v určitém předem zvoleném pořadí, přičemž(1) musí předcházet(2) a vztah(4) obvykle řadíme jako poslední.")
8 Příklad 1 Modelujte volný pád tělesa z výšky 100 m s přihlédnutím k odporu vzduchu. Předpokládejte, že velikost odporové síly se řídí Newtonovým vztahem F o = 1 2 CS v2 = Kv 2 ažemeznírychlostpádu,přikteréplatí F o = F G, je v m =20,0m s 1. Počítejtestíhovýmzrychlením g=9,8m s 2. Řešení Počátek O vztažné soustavy zvolíme v místě dopadu tělesa, kladnou poloosu y orientujeme směrem vzhůru. Pohyb bude probíhat po ose y v záporném smyslu. Na padající těleso působí výsledná síla F= F G + F o osouřadnicích F y = mg+ Kv 2, F x = F z =0. Pohybovou rovnici můžeme upravit na tvar a y = F y m = g+ K m v2 = g+ Lv 2, a x = a z =0. Koeficient L určíme z mezní rychlosti a tíhového zrychlení. Platí g+ Lvm 2 =0, g zčehož L= vm 2. Prodanéhodnoty L=0,0245m 1. Pro větší přehlednost a zjednodušení zápisu budeme v modelech pro souřadnice rychlosti v y azrychlení a y používatsymboly va a. V následujících ukázkách použijeme pro modelování pádu metodu ARV s časovým krokem h = 0,1 s. Počítačový model pohybu můžeme vytvořit v různých programovacích prostředích. My zkusíme nejprve použít všudypřítomný Excel od firmy Microsoft. Naši úlohu vyřešíme následujícím způsobem: a) DobuněkA5,B5aC5vložímekonstantypohybovérovniceačasovýkrok. b) DobuněkA8,B8aC8vložímepočátečníhodnotyveličin. c) DobuněkA9,B9,C9aD9vzorce,kterétvoříalgoritmusmetodyARV: (Adresybuněks$jsouabsolutní,bez$relativní. 1 ) d) Vybereme oblast vzorců(tj. oblast A9:D9) a kurzor přemístíme do pravého dolníhorohubuňkyd9,kdesezměnívevyplňovacítáhlo,kterémápodobu černého křížku. Stiskneme levé tlačítko myši a vyplňovací táhlo posouváme dolů.tímsevzorcezbuněka9ažd9kopírujídobuněkvnásledujícíchřádcích, přičemž absolutní adresy se zachovávají a relativní adresy se mění. Po uvolnění tlačítka myši se zabraná oblast zaplní výsledky výpočtů. Zkontrolujeme poslední řádek, a pokud není hodnota souřadnice y záporná, stisk- 1 )LzetakébuňkyA5,B5,C5vhodněpojmenovat(Vložit Název Definovat)avevzorcích pro lepší přehlednost použít tyto názvy(např. g, L, h). 8

 Spustíme Průvodce grafem a obvyklým způsobem k tabulce vytvoříme grafy.(volíme typ XY bodový.")
9 neme opět levé tlačítko myši a pokračujeme v automatickém vyplňování tabulky,ažjepodmínkasplněna.přičasovémkroku0,1stonastanena 73. řádku: e) Spustíme Průvodce grafem a obvyklým způsobem k tabulce vytvoříme grafy.(volíme typ XY bodový.) Buňka Vzorec Význam D9 =$B$5*C8^2-$A$5 a i = Lvi 2 g B9 =B8+C8*$C$5 y i+1 = y i + v i h C9 =C8+D8*$C$5 v i+1 = v i + a i h A9 =A8+$C$5 t i+1 = t i + h J PV / P K V W V \ P Y PV D PV. \ P W V W V Y PV 9
 Buňka Vzorec Význam D9 =$B$5*C8^2-$A$5 a i = Lvi 2 g B9 =B8+C8*$C$5 y i+1 = y i + v i h C9 =C8+D8*$C$5 v")

10 Modelování dějů v Excelu je dosti pracné. Všechny další modely proto budeme vytvářet s mnohem menší námahou v snadno dostupném prostředí Coach5. Než budete pokračovat ve čtení, měli byste se seznámit s přílohami A a B na konci textu. Zde najdete informace, jak nainstalovat potřebný software, stručný návod k jeho použití a poznámky k syntaxi programovacího jazyka. Jednoduché řešení naší úlohy o volném pádu je v následující ukázce. V pravé části okna programu jsou zapsány hodnoty konstant, počáteční hodnoty sledovaných veličin a zvolený časový krok h. V levé části jsou zapsány rekurentní vzorceprovýpočetposloupností {t i }, {a i }, {v i }a{y i }.Pospuštěníprogramu se výpočty cyklicky opakují. Počet opakování můžeme předem zvolit(maximálně 16380). Vypočtené hodnoty se postupně zapisují do tabulky a vynášejí do grafů. Program můžeme snadno vylepšit, aby se zakreslil i počáteční úsek grafu v časovém intervalu 0, h, aby výpočet skončil, jakmile souřadnice y dosáhne záporných hodnot a aby se automaticky vypočítala i celková doba pádu. Za tímto účelem zavedeme pomocnou proměnnou v další ukázce je to proměnná d.nazačátkuvýpočtusepouzejejíhodnotazměníz0na1aprogram pouze zaregistruje počáteční hodnoty sledovaných veličin. Teprve potom následuje první cyklus výpočtu podle rekurentních vzorců. Jakmile dojdeme 10


11 k záporné hodnotě y, vypočítá se čas dopadu lineární interpolací posledního časového kroku, hodnota proměnné d se zvětší na 2 a na začátku následujícíhocyklusevýpočetukončí.podobnéjednoduché finty budemepoužívati v dalších modelech. Modely volného pádu, které jsme právě vytvořili, jsou prakticky shodné. Vyčtemeznich,žetělesospadnepřibližněza6,4satéměřdosáhnemezní rychlosti20m s 1. Příklad 2 Modelujte kmity mechanického oscilátoru tvořeného pružinou o tuhosti k, na které je zavěšeno závaží o hmotnosti m. Závaží vychýlíme z rovnovážné polohy dovýšky y 0 avčase t=0uvolníme. Úlohuřešteprohodnoty k=50n m 1, m=2,0kg, y 0 =10cm.Odpor vzduchu zanedbejte. Řešení Tentokrát použijeme metodu AVR s časovým krokem h = 0,02 s. Pohybovou rovnici kmitů upravíme: F y = ma y = ky, a y = k m y. V programu zavedeme proměnné v a a jako číselné hodnoty souřadnic rychlosti a zrychlení nabývají střídavě záporných a kladných hodnot. Z modelu vidíme, že oscilátor harmonicky kmitá s periodou přibližně 1,26 s. 11


12 Příklad 3 Ve vztažné soustavě s počátkem ve středu Země modelujte pohyb družice, která máperigeumvevzdálenosti6700kmodzemskéhostředuajejírychlostmá vperigeuvelikost9000m s 1.HmotnostZemě M=6, kg,gravitační konstanta κ=6, N m 2 kg 2. Vztažnou soustavu považujte za inerciální. Řešení Vztažnou soustavu orientujeme tak, že perigeum se nachází na kladné poloose xarychlostzdemásměrkladnépoloosy y.pohybovourovniciupravímea rozepíšeme podle souřadnic: F= ma= κ Mm r 3 r, a= κm r 3 r, a x= κm r 3 x, a y= κm r 3 y. Použijeme metodu RAV s časovým krokem 60 s. Program doplníme podmíněnými příkazy, které ukončí výpočet po prvním oběhu družice a spustí výpočet konečné polohy a doby oběhu. 12

13 Z modelu vidíme, že družice se pohybuje po eliptické trajektorii s apogeem ve vzdálenosti přibližně km od zemského středu a dopočítaná doba oběhu je10589s. Úlohy 1. Modelujte volný pád pingpongového míčku z výšky 10 m. Poloměr míčku r=19mm,hmotnost m=2,3g,hustotavzduchu =1,2kg m 3,koeficient odporu C=0,48.Zmodeluurčetedobupáduavelikostrychlostidopadu. 2. Modelujte šikmý vrh a) pingpongového míčku, b) lehkoatletické ocelové koule (r=6,0cm, m=7,26kg)vevzduchuaporovnejtejejsvrhemvevakuu. Výsledná síla uděluje tělesu zrychlení o souřadnicich F= F G + F o = mg 1 2 CS vv a x = Lvv x, a y = g Lvv y, kde L= Cpr2 2m. Úlohu řešte pro různé hodnoty počáteční rychlosti a elevačního úhlu (úhel musítevyjádřitvradiánech).počátečnívýškuvrhuvolte y 0 =2,0m. 3. Modelujte tlumené kmity mechanického oscilátoru tvořeného jako v příkladu2pružinouotuhosti k,nakteréjezavěšenozávažíohmotnosti m.závaží jeponořenovnádoběskapalinouapřijehopohybunanějpůsobínezanedbatelná odporová síla. Děj se řídí pohybovou rovnicí F y = ma y = ky Bv. Závažívychýlímezrovnovážnépolohydovýšky y 0 avčase t=0uvolníme. Úlohuřešteprohodnoty k=50n m 1, m=2,0kg, y 0 =10cmaprorůzné hodnoty konstanty B. Porovnejte, jak se změní průběh děje, když překročíme kritickouhodnotu B krit =2 km=20kg s 1. 13

14 1.3 Porovnání modelů vytvořených elementárními metodami s přesným řešením pohybových rovnic V předcházejících ukázkách jsme studovali děje, jejichž pohybové rovnice dovedemeřešitanalyticky.tonámumožňujeporovnatčlenyposloupnosti {r i } získanéalgebraickoumetodousčlenyposloupnosti {r(t i )}získanépřesnýmvýpočtem. Pro volný pád ve vzduchu byly ve studijním textu[9] odvozeny vztahy e t Lg e t Lg ( v= v m e t Lg +e t = v mtgh t ) Lg, Lg y= y 0 v m Lg ln et Lg +e t Lg 2 = y 0 v ( m lncosh t ) Lg. Lg Na následujícím obrázku vidíme grafické modely volného pádu vytvořené metodamiarvaavrpřičasovémkroku h=0,2s,mezikterýmijepřesný graf získaný analytickou metodou.(metoda RAV by dala stejný výsledek jako metodaarv,protože autohotodějenezávisína r.) Oba modely dobře vystihují studovaný děj a po dostatečném zmenšení časového kroku by se prakticky shodovaly s přesným průběhem děje. Metoda ARV jezdeoněcopřesnějšínežmetodaavr. 14
![Pro volný pád ve vzduchu byly ve studijním textu[9] odvozeny vztahy e t Lg e t Lg ( v= v m e t Lg +e t = v mtgh t ) Lg, Lg y= y 0 v m Lg ln et Lg +e t Lg 2 = y 0 v ( m lncosh t ) Lg.](/docs-images/44/1989989/images/page_14.jpg "Lg Na následujícím obrázku vidíme grafické modely volného pádu vytvořené metodamiarvaavrpřičasovémkroku h=0,2s,mezikterýmijepřesný graf získaný analytickou metodou.")
15 Kmity mechanického oscilátoru modelované v příkladu 2 jsou popsány vztahem ( ) k y= y 0 cosωt=y 0 cos m t m amajíperiodu T=2p k, prodanéhodnoty T =1,257s.. Na následujícím obrázku jsou jejich grafické modely vytvořené metodami ARV,AVRiRAVsčasovýmkrokem h=0,05samezigrafyavraravse nachází graf získaný přesným výpočtem. ZdeseosvědčujemetodaAVR modelnepatrněpředbíháreálnýděj a metoda RAV model je nepatrně opožděn. Zmenšováním časového kroku bychom u obou metod rychle dosáhli uspokojivé přesnosti. Metoda ARV se jeví jako nevyhovující amplituda kmitů modelu v rozporu se skutečností narůstá a tento nedostatek by se nezanedbatelně projevoval i při mnohem menším časovém kroku. Pohyb umělé družice Země z příkladu 3 se řídí Keplerovými zákony Družice se pohybuje po eliptické trajektorii s ohniskem ve středu Země, jejíž poloosy mají délky a= x 0 2 v2 0 x 0 κm, b= a 2 (a x 0 ) 2. 15

16 Doba oběhu je T= 2pab y 0 v 0. Program, který vytváří model pohybu družice, počítá s danými hodnotami κ =6, N m 2 kg 2, M =6, kg, v 0 =9000m s 1 a y 0 =6, m, jakospřesnýmičísly,mělbytedydojítknezaokrouhleným výsledkům a= m, b= m, T=10541,4s. Přesnost použité metody můžeme posoudit podle odchylek těchto číselných hodnot od hodnot určených z modelu. Na následujícím obrázku jsou modely trajektorie družice vytvořené metodamiarv,avrarav.mezigrafyarvaravjemodelzískanýpřesným výpočtem.přesnápolohadružicevčase t i odprůchoduperigeemsedávypočítat řešením Keplerovy rovnice. Postup je podrobně vysvětlen ve studijním textu[8]. \0HWRGD >î(@ \0HWRGD >î(@ \0HWRGD >î(@ \0HWRGD >î(@ [P>î(@ RAV ARV AVR Modely vytvořené metodami AVR a RAV mají přibližně správný eliptický tvar, jsou jen vzhledem ke správné poloze poněkud pootočeny okolo ohniska. Při mnohonásobném oběhu by se toto pootočení zvolna měnilo. Také doba oběhu určená z těchto modelů(viz př. 3) zhruba odpovídá skutečné hodnotě, od které selišío48s.zmenšenímčasovéhokrokubychommohlitytomodelyvpotřebné míře upřesnit. Metoda ARV se podobně jako při modelování kmitů neosvědčila 16

17 trajektorie se modeluje jako stále se zvětšující spirála a tento nedostatek úplně neodstraníme ani při mnohonásobném zmenšení časového kroku. Z předcházejících ukázek je zřejmé, že elementární metody modelování pohybů dávají dostatečně přesné výsledky, jen pokud zvolíme velmi malý časový krok v porovnání s celkovou modelovanou dobou. Musíme tedy provést značné množství výpočtů, což u složitějších modelů může klást nároky na strojový čas počítače. Proto byly hledány metody, které jsou sice poněkud složitější, ale při stejném časovém kroku mnohonásobně přesnější. S některými z nich se seznámíme. Úloha 4. Doplňte program z příkladu 2 tak, aby se s numerickým modelem současně zobrazil i skutečný průběh kmitů popsaný vztahem ( ) k y=y 0 cos m t. Oba grafy porovnejte pro různé hodnoty časového kroku h. 17


18 1.4 Přesnější metody Zlepšení metody RAV metoda Feynmanova Feynmanova metoda pracuje s posloupností {v i+0,5 }=v 0,5, v 1,5,..., tedy s posloupností přibližných rychlostí v časech 0,5h;1,5h;2,5h;... První člen této posloupnosti určíme ze vztahu v 0,5 = v 0 + a 0 h/2. Pokud zrychlení hmotného bodu závisí jen na jeho poloze(harmonický pohyb,pohybdružice)apokudnásnezajímáposloupnost {v i },jedalšípostup podobný jako v metodě RAV. Použijeme cyklus r i+1 = r i + v i+0,5 h, a i+1 = a(r i+1 ), v i+1,5 = v i+0,5 + a i+1 h. Poznámka:VtétopodobějeFeynmanovametodapopsánavprvnímdílu Feynmanových přednášek z fyziky. V učebnicích numerické matematiky se s názvem Feynmanovametoda nesetkáte. Chceme-li použít Feynmanovu metodu v příkladu 3, stačí v programu pro metodu RAV dopsat na konec tabulky počátečních hodnot tři řádky pomocného výpočtu: a dostaneme následující výsledek: 18
, v i+1,5 = v i+0,5 + a i+1 h. Poznámka:VtétopodobějeFeynmanovametodapopsánavprvnímdílu Feynmanových přednášek z fyziky.")
19 Model trajektorie už není pootočen jako při použití metody RAV a také dobaoběhujevypočítánapodstatněpřesněji odskutečnéselišíjeno18s. Dosáhli jsme tedy podstatného zlepšení téměř bez prodloužení výpočtu. Jestliže zrychlení hmotného bodu závisí i na jeho rychlosti, případně i na čase, je cyklus nutno změnit na r i+1 = r i + v i+0,5 h, v i+1 = v i+0,5 + a i h/2, t i+1 = t i + h, a i+1 = a(t i+1, v i+1, r i+1 ), v i+1,5 = v i+0,5 + a i+1 h. Feynmanova metoda jako první z uvedených je schopna zcela přesně modelovat pohyby s konstantním zrychlením. V tomto případě vede totiž k obecným vztahům v i = v 0 + a 0 ih, r i = r 0 + v 0 ih+a 0 (ih) 2 / Upravená metoda ARV TakémetoduARVjemožnoupravittak,abydávalapřesnévýsledkypřimodelování pohybů s konstantním zrychlením. Stačí upravit rekurentní vztah pro r i+1 podlekinematickýchzákonůrovnoměrnězrychlenéhopohybu.dostávámetakupravenoumetoduarvuscyklem1,3,2,4: a i = a(t i, v i, r i ), r i+1 = r i + v i h+a i h 2 /2, (3 ) v i+1 = v i + a i h, t i+1 = t i + h. Chceme-li použít metodu ARVU při řešení příkladu 3, stačí v programu výpočtu změnit algoritmus metody: 19
, v i+1,5 = v i+0,5 + a i+1 h. Feynmanova metoda jako první z uvedených je schopna zcela přesně modelovat pohyby s konstantním zrychlením.")
20 a dostaneme následující výsledek, se kterým však nebudeme příliš spokojeni: Metoda ARVU se hodí pro modelování pohybů hmotného bodu s konstantním zrychlením např. volného pádu a vrhů ve vakuu. Ve většině ostatních případu nevede, i přes určité zlepšení oproti metodě ARV, k uspokojivým výsledkům, pokud nezvolíme neúnosně malý časový krok. Budeme však z ní vycházet při popisu mnohem úspěšnějších metod Rungových Kuttových Metody Rungovy Kuttovy Zrychlení hmotného bodu se během časového kroku mění. Proto nejprve metodou ARVU přibližně určíme polohu a rychlost hmotného bodu v několika okamžicích t 1, t 2,..., t s zintervalu t i,t i+1 avypočítámepříslušnázrychlení 20

21 k 1, k 2,..., k s. Přikaždémztěchto pokusů,kroměprvního,využijemezkušenostiz pokusu předcházejícího. Vhodnou kombinaci zjištěných zrychlení pak použijeme ve výsledných rekurentních vztazích, které jsou podobné jako v upravené metodě ARV. Rungova Kuttova metoda 2. řádu Optimálnívolbaje t 1= t i, t 2= t i +2h/3.(VizpřílohyCaD.)Cyklusvýpočtu popisují vztahy: k 1 = a(t i, v i, r i ), k 2 = a(t i +2h/3, v i + k 1 2h/3, r i + v i 2h/3+k 1 2h 2 /9), r i+1 = r i + v i h+(k 1 + k 2 )h 2 /4 v i+1 = v i +(k 1 +3k 2 )h/4, t i+1 = t i + h. Někdysepoužívávolba t 1 = t i, t 2 = t i+ h.cyklusvýpočtupakpopisují jednodušší vztahy: k 1 = a(t i, v i, r i ), k 2 = a(t i + h, v i + k 1 h, r i + v i h+k 1 h 2 /2), r i+1 = r i + v i h+(2k 1 + k 2 )h 2 /6, v i+1 = v i +(k 1 + k 2 )h/2, t i+1 = t i + h. Rungova Kuttova metoda 3. řádu Optimálnívolbaje: t 1 = t i, t 2 = t i+ h/2, t 3 = t i+3h/4.cyklusvýpočtu popisují vztahy: k 1 = a(t i, v i, r i ), k 2 = a(t i + h/2, v i + k 1 h/2, r i + v i h/2+k 1 h 2 /8), k 3 = a(t i +3h/4, v i + k 2 3h/4, r i + v i 3h/4+k 2 9h 2 /32), r i+1 = r i + v i h+(k 1 +2k 2 )h 2 /6, v i+1 = v i +(2k 1 +3k 2 +4k 3 )h/9, t i+1 = t i + h. Rungova Kuttova metoda 4. řádu je nejpoužívanější z Rungových Kuttových metod. Cyklus výpočtu popisují vztahy: k 1 = a(t i, v i, r i ), k 2 = a(t i + h/2, v i + k 1 h/2, r i + v i h/2+k 1 h 2 /8), 21
22 k 3 = a(t i + h/2, v i + k 2 h/2, r i + v i h/2+k 2 h 2 /8), k 4 = a(t i + h, v i + k 3 h, r i + v i h+k 3 h 2 /2), r i+1 = r i + v i h+(k 1 + k 2 + k 3 )h 2 /6, v i+1 = v i +(k 1 +2k 2 +2k 3 + k 4 )h/6, t i+1 = t i + h. Vraťme se opět k příkladu 3. Chceme-li jej vyřešit Rungovou Kuttovou metodou druhého řádu, použijeme algoritmus a dostaneme výsledek, který uspokojí i náročné řešitele. Chyba v určení doby oběhu je menší než 1 s. Kdybychom chtěli dosáhnout téže přesnosti při použití metody RAV, museli bychom časový krok asi desetkrát zmenšit. 22
23 Modely vytvořené Rungovými Kuttovými metodami 3. a 4. řádu by byly ještě přesnější. Z předcházející ukázky je zřejmé, že Rungovy Kuttovy metody(hlavně RK3 a RK4) jsou mnohem přesnější než předcházející(včetně metody Feynmanovy). Jsou však poněkud složitější, a proto při stejném časovém kroku náročnější na strojový čas počítače. Dáme jim přednost zejména tehdy, když pro získání názorného grafického modelu vystačíme s menším počtem bodů a chceme i při větším časovém kroku dosáhnout dobré numerické přesnosti. Taková situace nastává při modelování pohybů kosmických těles. Naproti tomu při modelování kmitavých dějů, kde pro získání hledaných průběhů potřebujeme velký počet grafických bodů, volíme časový krok menší než jedna dvacetina periody a pak dosáhneme uspokojivé přesnosti i při použití elementárních metod AVR nebo RAV. Úloha 5. Úlohu z příkladu 2 řešte některou Rungovou Kuttovou metodou tak, aby se s numerickým modelem současně zobrazil i skutečný průběh kmitů popsaný vztahem ( ) k y=y 0 cos m t. Oba grafy porovnejte pro různé hodnoty časového kroku h. 23
24 2 Dalšítypyúloh 2.1 Úlohy, které vedou na diferenciální rovnici 1. řádu Při modelování pohybu hmotného bodu jsme vycházeli z pohybové rovnice, což je z matematického hlediska vektorová diferenciální rovnice druhého řádu. Veličina, jejíž změny jsme sledovali, byl polohový vektor r. Zákony dějů, na které se teď zaměříme, jsou vyjádřeny diferenciální rovnicí 1. řádu a sledované veličiny vystupují jako skaláry. Nechťsledovanáveličina ymávčase t=0hodnotu y 0 amodelovanýděj se řídí rovnicí dy dt = f(t,y). Rekurentní vztah Eulerovy metody pak je y i+1 = y i + f(t i,y i ) h. Chceme-li při stejném časovém kroku dosáhnout větší přesnosti výpočtu, použijeme některou Rungovu Kuttovu metodu. Rungova Kuttova metoda 2. řádu mápřioptimálnívolbě t 1, t 2 = t i+2h/3(vizpřílohac)algoritmus: k 1 = f(t i,y i ), k 2 = f(t i +2h/3,y i + k 1 2h/3), y i+1 = y i +(k 1 +3k 2 )h/4, t i+1 = t i + h. Rungova Kuttova metoda 3. řádu mápřioptimálnívolbě t 1, t 2= t i + h/2, t 3= t i +3h/4algoritmus: k 1 = f(t i,y i ), k 2 = f(t i + h/2,y i + k 1 h/2), k 3 = f(t i +3h/4,y i + k 2 3h/4), y i+1 = y i +(2k 1 +3k 2 +4k3)h/9, t i+1 = t i + h. Nejpoužívanější Rungova Kuttova metoda 4. řádu má algoritmus: k 1 = f(t i,y i ), k 2 = f(t i + h/2,y i + k 1 h/2), k 3 = f(t i + h/2,y i + k 2 h/2), k 4 = f(t i + h,y i + k 3 h), y i+1 = y i +(k 1 +2k 2 +2k 3 + k 4 )h/6, t i+1 = t i + h. 24
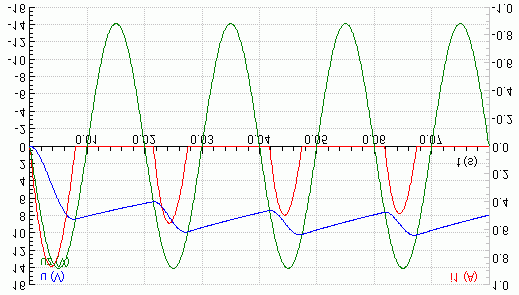
25 Příklad 4 Modelujte děj při jednocestném usměrnění střídavého proudu v následujícím zapojení: R i id i u z u R C Zdroj považujte za spojení ideálního zdroje střídavého harmonického napětí u z ofrekvenci50hzaamplitudě U m = 14,1 Varezistoruoodporu R i =10Ω,spotřebičmáodpor R=100Ω,kapacitafiltračníhokondenzátoruje C =500 mf.diodupovažujtezaideální.zgrafuatabulkyzjistěte střední hodnotu napětí u na spotřebiči a jeho zvlnění. Zjistěte také dobu, po kterou během jedné periody střídavého napětí prochází diodou proud, a jaká je jeho maximální hodnota. Určete i velikost proudového nárazu těsně po zapnutí obvoduzapředpokladu,žektomudošlovokamžiku,kdy u z =0. Řešení Elektromotorické napětí zdroje závisí na čase podle vztahu u z = U m sin(ωt). Pokudje u z > u,procházídiodouproudaprozměnunábojenakondenzátoru platí ( uz u dq= C du=(i d i)dt= u ) dt. R i R Ztoho Jestliže u z u,platí du= i ( d i C dt= uz u R i C u ) dt. RC dq= C du= idt= u R dt. du= i C dt= u RC dt. Rekurentní vzorec pro výpočet modelu musíme tedy upravit podle toho, která z obou situací právě nastala. Z grafu a tabulky vidíme, že už během prvních tří period střídavého napětí přejde obvod do pravidelného režimu, ve kterém napětí kondenzátoru je kolísá mezihodnotami10,3va7,7v.středníhodnotaje9,0v.běhemjednéperiodyprocházídiodouproudjenpodobu5,6ms,cožje28%periody,ajeho maximální hodnota je 0,48 A. První proudový náraz ovšem dosahuje hodnoty 0,87 A. 25
26 26
27 Příklad 5 y S Q S 1 Do prázdné válcové nádoby, jejíž dno má plošný obsah S akterámáudnaotvoroplošnémobsahu S 1,začnepřitékatvodasestálýmobjemovýmprůtokem Q.Jaksebudeměnitvýška yhladinyvzávislostinačase?jakémaximálníhodnoty y m dosáhne? Zajakoudobuvystoupíhladinadovýšky y m /2? Úlohuřešteprohodnoty S=5dm 2, S 1 =30mm 2, Q=0,10dm 3 s 1. Řešení Pokusme se nejprve o analytické řešení úlohy. Vodabudeotvoremudnanádobyvytékatrychlostí v= 2ghsobjemovým průtokem Q 1 = S 1 v.zadobudtsevýškahladinyzměnío dy= (Q Q 1)dt S Separací proměnných a dosti pracnou integrací t 0 dt= y 0 = Q S 1 2gy dt. (1) S Sdy Q S 1 2gy získáme složitý vztah t= 2S ( 2QS y S 1 2g 2S1g 2 ln 1 S ) 1 2gy, (2) Q ze kterého se výška y jako funkce času nedá explicitně vyjádřit. Pokud bychom chtěli graficky znázornit vztah mezi oběma veličinami, hodí se k tomu inverzní funkce t=t(y). Užzvýchozírovnice(1)můžemeovšemurčitmaximálnívýšku y m,jestliže položímedy=0.pak y= y m = Q2 2gS1 2. Prodanéhodnotyvychází y m = 0,5669 m.dosadíme-lipolovičníhodnotu y m /2=0,28345mdo(2),dostanemehledanýčas t=295s. 27
28 Tutéž úlohu teď vyřešíme numericky použitím Eulerovy metody s časovým krokem10s: Graf, který zobrazuje průběh děje během jedné hodiny, vypadá dosti věrohodně. Z tabulky, kterou jsme zde nevytiskli, zjistíme, že výška hladiny dosáhne včase5150shodnoty0,5669madáleužneroste.polovičnívýškybypodle tabulkymělahladinadosáhnoutmezičasy280sa290s,tedyoněcodříve,než jsme určili přesným výpočtem. Tato nepřesnost je zřejmě způsobena nevhodnou volbou časového kroku. Návod, jak zvolit časový krok, abychom dosáhli dostatečné přesnosti numerického modelu i bez znalosti analytického řešení, je jednoduchý. Časový krok tolikrát zmenšíme na polovinu předchozího, až se výsledky výpočtu budou prakticky shodovat. Na detailu grafu vidíme, že v naší úloze dosáhneme přesnosti, s jakou jsme počítali čas výstupu do poloviční výšky při analytickém řešení, jestliže zvolíme časový krok 1 s. 28

29 Použijeme-li Rungovu Kuttovu metodu 2. řádu, dosáhneme v naší úloze stejné přesnosti výpočtu už při časovém kroku 20 s: Poznámka: Při modelování fyzikálního děje bychom neměli zapomínat, že to, jak přesně model vystihuje reálný děj, nezávisí jen na přesnosti použité numerické metody, ale také na přesnosti, se kterou byly stanoveny hodnoty veličin, které zde vystupují jako parametry, na míře zjednodušení, s jakým charakterizujeme danou situaci a na přesnosti použitých fyzikálních vzorců. S přihlédnutím k těmto skutečnostem bychom měli volit počet platných číslic při výpisu tabulek a popisování grafů. Úloha 6.Válcovánádoba,jejíždnomáplošnýobsah S=2,5dm 2 bylanaplněnavodou dovýšky y 0 =80cm.Včase t=0bylvedněotevřenotvoroplošnémobsahu S 1 =10mm 2.Modelujtečasovýprůběhpoklesuhladinyvnádoběaurčete dobu, za kterou se nádoba vyprázdní. 29
30 2.2 Úlohy, které vedou na soustavu diferenciálních rovnic 1. řádu Omezíme se na případ, kdy je chování nějaké soustavy popsáno dvěma veličinami yaz,jejichžpočátečníhodnotyznámeaprokteréplatírovnice dy dt = f(t,y,z), dz dt = g(t,y,z).rekurentnívztahyeulerovy metody pak jsou y i+1 = y i + f(t i,y i,z i ) h. z i+1 = z i + g(t i,y i,z i ) h. Chceme-li při stejném časovém kroku dosáhnout větší přesnosti výpočtu, použijeme některou Rungovu Kuttovu metodu. Rungova Kuttova metoda 2. řádu přioptimálnívolbě t 1, t 2= t i +2h/3budemítalgoritmus: k 1 = f(t i,y i,z i ), l 1 = g(t i,y i,z i ), k 2 = f(t i +2h/3,y i + k 1 2h/3,z i + l 1 2h/3), l 2 = g(t i +2h/3,y i + k 1 2h/3,z i + l 1 2h/3), y i+1 = y i +(k 1 +3k 2 )h/4, z i+1 = z i +(l 1 +3l 2 )h/4, t i+1 = t i + h. Příklad 6 V obvodu zapojeném podle následujícího obrázku se dva kondenzátory o stejné kapacitě Cposepnutíspínačenabilyzezdrojeonapětí Upřesdvarezistory oodporu Rajedenrezistoroodporu2R. U R 2R i 1 i R i 2 X u Y u 1 C C u 2 a) Jakýnábojprošelběhemnabíjenívětví XY? b) Jaksevzávislostinačaseměnilanapětí u 1, u 2 nakondenzátorechaproud i vevětvi XY? c) Jaké maximální hodnoty dosáhl proud i a ve kterém okamžiku? 30
31 Částa)řešteobecně,celouúlohupakřešteprohodnoty U=5V, R=1MΩ, C = 1 mf vytvořením dynamického modelu postupným numerickým výpočtem. Řešení a) Označme podle obrázku okamžité hodnoty proudů ve větvích rezistory i 1, i 2, ianáboje,kterétěmitorezistoryběhemnabíjeníkondenzátorůprojdou, Q 1, Q 2 a Q.Vkaždémokamžikuplatí Ri 1 + Ri=2Ri 2 i 1 + i=2i 2. Pro náboje, které projdou rezistory, tedy platí v kterémkoli krátkém časovém intervalu dt dq 1 +dq=2 dq 2. Proto i celkové náboje, které projdou rezistory, musí splňovat vztah Ze zákona zachování náboje dále plyne Dosazením z(2) do(1) dostaneme Q 1 + Q=2Q 2. (1) Q 1 = UC+ Q, Q 2 = UC Q. (2) UC+2Q=2(UC Q) Prodanéhodnotyje Q=1,25 mc. Q= UC 4. b,c)jestliževurčitémokamžikujsounakondenzátorechnapětí u 1, u 2,pak v následujícím časovém intervalu dt se změní o du 1 = dq 1 dq C = i 1 i C dt= U u 1 R u 1 u 2 R dt, C Po úpravě du 2 = dq 2+dQ C = i 2+ i C dt= U u 2 2R + u 1 u 2 R dt. C du 1 = U 2u 1+ u 2 RC dt, du 2 = U+2u 1 3u 2 dt. (3) 2RC Tyto vztahy použijeme pro vytvoření algoritmu numerického výpočtu časového průběhu napětí na kondenzátorech. Chceme-li současně sledovat i okamžitou hodnotu proudu i a rostoucí hodnotu náboje Q, prošlého větví XY, přidáme vztahy i= u 1 u 2, dq=idt. (4) R 31

32 PřipoužitíEulerovymetodyvyjdecelkovýnábojvčase t=16s,kdyuž proudy prakticky zanikly, Q = 1,2475 mc, což dobře souhlasí s teoretickým výsledkem z části a). Z tabulky dále zjistíme, že proud i dosáhl maximální hodnoty0,560 mavčase t=0,655s. Rungovou Kuttovou metodou 2. řádu dostaneme ještě přesněji celkový náboj Q=1,24988 mcapromaximálníproudvycházívtémžečasepřesnější hodnota 0,561 ma. 32
33 Úlohy 7. Modelujte kmity elektromagnetického oscilátoru. Kondenzátor o kapacitě C nabijemezezdrojeoelektromotorickémnapětí U 0 apakjejpřipojímkcívce, kterou můžeme považovat za sériové spojení ideální cívky o indukčnosti L a rezistoruorezistanci R.Vyšetřete,jaksevzávislostinačaseměnínapětí una kondenzátoru a proud i v obvodu. Vycházíme ze vztahů u=u L + u R = L di dt + Ri, i= Cdu dt. Úpravou dostaneme vztahy vhodné pro použití Eulerovy metody: ( u di= L Ri ) dt, du= i L C dt. U 0 C u i R L u L u R 8. Modelujte děje v RC oscilátoru s operačním zesilovačem. Volte nejprve R 1 =1MΩ, R 2 = R 3 =100kΩ, C=100 mω. Operační zesilovač v tomto zapojení funguje jako komparátor, tj. porovnává napětí u1au2.jestliže u 1 > u 2,pakjevýstupnínapětí u o = U L = 12V, jetliže u 1 < u 2,pak u o = U H =12V.Vstupníodporoperačníhozesilovačeje prakticky nekonečný. Proto platí u 2 = R 2 u o, C du 1 = u o u 1. R 2 + R 3 dt R 1 Úkoly: a) Ověřte, že oscilátor kmitá s periodou ( T=2RCln 1+ 2R ) 2. R 3 C R 1 b) Navrhnětehodnoty R 1, R 2 a R 3 tak,aby oscilátorkmitalsperiodou1saabynapětí u 1 měloamplitudu5v. u 1 u 2 R 2 R 3 u o 33
34 Příloha A. Demoverze programu Coach 5. Instalace a první kroky Instalace je jednoduchá. Z webové adresy uvedené v úvodu nebo z archivu studijních textů na stránkách FO stáhneme instalační soubor Setupex.exe, spustíme jej, proklikáme se instalací až na konec a na pracovní plochu počítače umístíme tři nabízené ikony Exploring Coach Hardware, Exploring Coach Software a Uninstall. Při instalaci vznikne na systémovém disku počítače adresář CMADEMO.Chcete-liCoach5 počeštit,překopírujtedonějještě soubory obsažené v coachcz.zip, který také najdete na webových stránkách FO. Chceme-li začít s modelováním, klikneme na ikonu Exploring Coach Software. Na obrazovce se objeví nabídkové okno Volba úlohyavněmdoledvamodely:modeling1.motionofarunner amodeling2.alampconnectedtoacapacitor.začátečníkům neznalým programování doporučuji spustit nejprve první model a krok za krokem postupovat pole instrukcí v textových oknech. Pak stisknutím tlačítka Otevřít úlohu přejděte na druhý model a opět postupujte krok za krokem podle instrukcí. Po absolvování této procedury budete vědět všechno podstatné, abyste mohli začít samostatně programovat vlastní modely. Měli byste si ale ještě pročíst přílohu B, abyste se při psaní programu vyvarovali zbytečných chyb. V demoverzi Coach 5 můžete nový model vytvořit jen přepsáním modelu starého. Obsah oken můžete bez obav vymazat, při příštím spuštění systému se obnoví původní stav. V pravé části okna pro psaní programu definujte počáteční hodnoty veličin, hodnoty konstant a zadejte velikost časového kroku. V levé části zapište příkazy pro výpočet modelu. Okno programu můžete přesouvat, měnit jeho velikost případně jej i skrýt nebo obnovit pomocí tlačítka Modelování. Tlačítkem Parametry modelu otevřete okénko pro nastavení počtu cyklů výpočtu(maximálně 16380). Otevřít úlohu Modelování Parametry úlohy Start Graf Tabulka Po stisknutí tlačítka Graf zvolte Nový graf a v dialogovém okně nastavte parametry grafu. Pak stiskněte OK a kliknutím umístěte graf do některého okna. Stejným způsobem postupujte při přípravě tabulky. Pokud je program napsán bez chyb, pak stisknutí zeleného tlačítka Start provede výpočty, vyplní tabulku a nakreslí grafy. Je-li v programu syntaktická chyba,objevísechybovéhlášeníavokněprogramublikákurzornapozici,kde se chyba nachází. Teprve po odstranění všech syntaktických chyb může dojít 34

35 kvýpočtu. Také v průběhu výpočtu se mohou objevit problémy, pokud by mělo například dojít k dělení nulou nebo k výpočtu druhé odmocniny ze záporného čísla. V takovém případě se výpočet zastaví a objeví se chybové hlášení, podle kterého musíme program upravit. Hotový model můžeme upravovat a studovat. K tomu slouží rozsáhlá místní nabídka, kterou vyvoláme pravým tlačítkem myši v okně grafu: Všimněme si alespoň volby Simulace, která umožňuje spustit model opakovaně a pokaždé změnit hodnotu zvoleného parametru: Přesuneme-li kurzor myši do okna grafu, změní se jeho vzhled do podoby lupy. Stiskneme-li levé tlačítko myši, můžeme pohybem myši vymezit malou oblast grafu, která se po uvolnění tlačítka zobrazí v celém okně i s příslušnými 35
Modelování fyzikálních dějů numerickými metodami
 Modelování fyzikálních dějů numerickými metodami Studijní text pro řešitele FO a ostatní zájemce o fyziku Přemysl Šedivý Obsah 1 Modelování pohybu hmotného bodu 4 1.1 Pohybovérovniceajejichřešení.... 4
Modelování fyzikálních dějů numerickými metodami Studijní text pro řešitele FO a ostatní zájemce o fyziku Přemysl Šedivý Obsah 1 Modelování pohybu hmotného bodu 4 1.1 Pohybovérovniceajejichřešení.... 4
POHYBY TĚLESA V ODPORUJÍCÍM PROSTŘEDÍ
 POHYBY TĚLESA V ODPORUJÍCÍM PROSTŘEDÍ Studijní text pro řešitele FO, kat. B Ivo Volf, Přemysl Šedivý Úvod Základní zákon klasické mechaniky, zákon síly, který obvykle zapisujeme vetvaru F= m a, (1) umožňuje
POHYBY TĚLESA V ODPORUJÍCÍM PROSTŘEDÍ Studijní text pro řešitele FO, kat. B Ivo Volf, Přemysl Šedivý Úvod Základní zákon klasické mechaniky, zákon síly, který obvykle zapisujeme vetvaru F= m a, (1) umožňuje
Modelování pohybů numerickými metodami
 Příloha C Odvození kombinačních koeficienfů pro Rungovu Kuttovu metodu 2 řádu Předpokádejme, že v intervalu t i,t i+1 je pohyb hmotného bodu dostatečně přesně popsán rovnicí třetího stupně r = A + Bτ +
Příloha C Odvození kombinačních koeficienfů pro Rungovu Kuttovu metodu 2 řádu Předpokádejme, že v intervalu t i,t i+1 je pohyb hmotného bodu dostatečně přesně popsán rovnicí třetího stupně r = A + Bτ +
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
R2.213 Tíhová síla působící na tělesa je mnohem větší než gravitační síla vzájemného přitahování těles.
 2.4 Gravitační pole R2.211 m 1 = m 2 = 10 g = 0,01 kg, r = 10 cm = 0,1 m, = 6,67 10 11 N m 2 kg 2 ; F g =? R2.212 F g = 4 mn = 0,004 N, a) r 1 = 2r; F g1 =?, b) r 2 = r/2; F g2 =?, c) r 3 = r/3; F g3 =?
2.4 Gravitační pole R2.211 m 1 = m 2 = 10 g = 0,01 kg, r = 10 cm = 0,1 m, = 6,67 10 11 N m 2 kg 2 ; F g =? R2.212 F g = 4 mn = 0,004 N, a) r 1 = 2r; F g1 =?, b) r 2 = r/2; F g2 =?, c) r 3 = r/3; F g3 =?
11. přednáška 10. prosince Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah
 je vztah") 11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
7. Gravitační pole a pohyb těles v něm
 7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
9.7. Vybrané aplikace
 Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
MS OFFICE MS WORD. Editor rovnic - instalace
 MS OFFICE Může se zdát, že užití kancelářského balíku MS Office při výuce fyziky nepřesahuje běžné aplikace a standardní funkce, jak jsou popsány v mnoha příručkách ke všem jednotlivým částem tohoto balíku.
MS OFFICE Může se zdát, že užití kancelářského balíku MS Office při výuce fyziky nepřesahuje běžné aplikace a standardní funkce, jak jsou popsány v mnoha příručkách ke všem jednotlivým částem tohoto balíku.
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C)
") VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
Měření tíhového zrychlení reverzním kyvadlem
 43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
Řešení úloh 1. kola 49. ročníku fyzikální olympiády. Kategorie B
 Řešení úloh kola 9 ročníku fyzikální olympiády Kategorie B Autořiúloh:MJarešová,,,5),PŠedivý3,7)aVKoubek6) a) Označme hvýškunadzemí,kdedojdekesrážcespodní kuličkadopadnenazemrychlostíovelikosti v 0 Hg
Řešení úloh kola 9 ročníku fyzikální olympiády Kategorie B Autořiúloh:MJarešová,,,5),PŠedivý3,7)aVKoubek6) a) Označme hvýškunadzemí,kdedojdekesrážcespodní kuličkadopadnenazemrychlostíovelikosti v 0 Hg
[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.
![[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.](/thumbs/54/34794266.jpg "[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.") 5. GRAVITAČNÍ POLE 5.1. NEWTONŮV GRAVITAČNÍ ZÁKON Gravitace Gravitace je všeobecná vlastnost těles. Newtonův gravitační zákon Znění: Dva hmotné body se navzájem přitahují stejně velkými gravitačními silami
5. GRAVITAČNÍ POLE 5.1. NEWTONŮV GRAVITAČNÍ ZÁKON Gravitace Gravitace je všeobecná vlastnost těles. Newtonův gravitační zákon Znění: Dva hmotné body se navzájem přitahují stejně velkými gravitačními silami
Numerická matematika. Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou
 Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa
 pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
mechanická práce W Studentovo minimum GNB Mechanická práce a energie skalární veličina a) síla rovnoběžná s vektorem posunutí F s
 síla rovnoběžná s vektorem posunutí F s") 1 Mechanická práce mechanická práce W jednotka: [W] = J (joule) skalární veličina a) síla rovnoběžná s vektorem posunutí F s s dráha, kterou těleso urazilo 1 J = N m = kg m s -2 m = kg m 2 s -2 vyjádření
1 Mechanická práce mechanická práce W jednotka: [W] = J (joule) skalární veličina a) síla rovnoběžná s vektorem posunutí F s s dráha, kterou těleso urazilo 1 J = N m = kg m s -2 m = kg m 2 s -2 vyjádření
Přijímací zkouška na navazující magisterské studium 2015
 Přijímací zkouška na navazující magisterské studium 205 Studijní program: Studijní obory: Fyzika FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Pro funkci f(x) := e x 2. Určete definiční
Přijímací zkouška na navazující magisterské studium 205 Studijní program: Studijní obory: Fyzika FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Pro funkci f(x) := e x 2. Určete definiční
37. PARABOLA V ANALYTICKÉ GEOMETRII
 37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
Výpočet nového stavu je závislý na bezprostředně předcházejícím stavu (může jich být i více, zde se však omezíme na jeden).
.") Počáteční úloha Při simulace vývoje systému v čase používáme jednoduché zásady: Spojitý čas nahradíme posloupností časových okamžiků t 0, t 1, t 2, t 3,, t i,. Interval mezi následujícími časovými okamžiky
Počáteční úloha Při simulace vývoje systému v čase používáme jednoduché zásady: Spojitý čas nahradíme posloupností časových okamžiků t 0, t 1, t 2, t 3,, t i,. Interval mezi následujícími časovými okamžiky
Diferenciální rovnice kolem nás
 Diferenciální rovnice kolem nás Petr Kaplický Den otevřených dveří MFF UK 2012 Praha, 29. 11. 2012 Petr Kaplický (KMA MFF UK) Diferenciální rovnice kolem nás 1 / 24 Plán 1 Let Felixe B. 2 Pád (s odporem
Diferenciální rovnice kolem nás Petr Kaplický Den otevřených dveří MFF UK 2012 Praha, 29. 11. 2012 Petr Kaplický (KMA MFF UK) Diferenciální rovnice kolem nás 1 / 24 Plán 1 Let Felixe B. 2 Pád (s odporem
3. Optimalizace pomocí nástroje Řešitel
 3. Optimalizace pomocí nástroje Řešitel Rovnováha mechanické soustavy Uvažujme dvě různé nehmotné lineární pružiny P 1 a P 2 připevněné na pevné horizontální tyči splývající s osou x podle obrázku: (0,0)
3. Optimalizace pomocí nástroje Řešitel Rovnováha mechanické soustavy Uvažujme dvě různé nehmotné lineární pružiny P 1 a P 2 připevněné na pevné horizontální tyči splývající s osou x podle obrázku: (0,0)
Měření modulů pružnosti G a E z periody kmitů pružiny
 Měření modulů pružnosti G a E z periody kmitů pružiny Online: http://www.sclpx.eu/lab2r.php?exp=2 V tomto experimentu vycházíme z pojetí klasického pokusu s pružinovým oscilátorem. Z periody kmitů se obvykle
Měření modulů pružnosti G a E z periody kmitů pružiny Online: http://www.sclpx.eu/lab2r.php?exp=2 V tomto experimentu vycházíme z pojetí klasického pokusu s pružinovým oscilátorem. Z periody kmitů se obvykle
metody jsou proto často jedinou možností jak danou diferenciální rovnicivyřešit.
 7. ODR počáteční úlohy Průvodce studiem Jen velmi málo diferenciálních rovnic, které se vyskytují při popisu praktických úloh, se dářešit exaktně, a i když dokážeme najít vzorce popisující analytickéřešení,
7. ODR počáteční úlohy Průvodce studiem Jen velmi málo diferenciálních rovnic, které se vyskytují při popisu praktických úloh, se dářešit exaktně, a i když dokážeme najít vzorce popisující analytickéřešení,
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole
 Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Mechanické kmitání - určení tíhového zrychlení kyvadlem
 I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
pracovní list studenta
 Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
Základní vzorce a funkce v tabulkovém procesoru
 Základní vzorce a funkce v tabulkovém procesoru Na tabulkovém programu je asi nejzajímavější práce se vzorci a funkcemi. Když jednou nastavíte, jak se mají dané údaje zpracovávat (některé buňky sečíst,
Základní vzorce a funkce v tabulkovém procesoru Na tabulkovém programu je asi nejzajímavější práce se vzorci a funkcemi. Když jednou nastavíte, jak se mají dané údaje zpracovávat (některé buňky sečíst,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Derivace goniometrických funkcí
 Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
CVIČNÝ TEST 5. OBSAH I. Cvičný test 2. Mgr. Václav Zemek. II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19
 CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
Příklad 1. Řešení 1a. Řešení 1b ŘEŠENÉ PŘÍKLADY Z M1B ČÁST 5
 Příklad 1 Najděte totální diferenciál d (h) pro h=(h,h ) v příslušných bodech pro následující funkce: a) (,)= cos, =1; b) (,)=ln( + ), =2; 0 c) (,)=arctg(), =1; 0 1 d) (,)= +, =1; 1 Řešení 1a Máme nalézt
Příklad 1 Najděte totální diferenciál d (h) pro h=(h,h ) v příslušných bodech pro následující funkce: a) (,)= cos, =1; b) (,)=ln( + ), =2; 0 c) (,)=arctg(), =1; 0 1 d) (,)= +, =1; 1 Řešení 1a Máme nalézt
Systém vykonávající tlumené kmity lze popsat obyčejnou lineární diferenciální rovnice 2. řadu s nulovou pravou stranou:
 Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Excel tabulkový procesor
 Pozice aktivní buňky Excel tabulkový procesor Označená aktivní buňka Řádek vzorců zobrazuje úplný a skutečný obsah buňky Typ buňky řetězec, číslo, vzorec, datum Oprava obsahu buňky F2 nebo v řádku vzorců,
Pozice aktivní buňky Excel tabulkový procesor Označená aktivní buňka Řádek vzorců zobrazuje úplný a skutečný obsah buňky Typ buňky řetězec, číslo, vzorec, datum Oprava obsahu buňky F2 nebo v řádku vzorců,
Vzorce. Suma. Tvorba vzorce napsáním. Tvorba vzorců průvodcem
 Vzorce Vzorce v Excelu lze zadávat dvěma způsoby. Buď známe přesný zápis vzorce a přímo ho do buňky napíšeme, nebo použijeme takzvaného průvodce při tvorbě vzorce (zejména u složitějších funkcí). Tvorba
Vzorce Vzorce v Excelu lze zadávat dvěma způsoby. Buď známe přesný zápis vzorce a přímo ho do buňky napíšeme, nebo použijeme takzvaného průvodce při tvorbě vzorce (zejména u složitějších funkcí). Tvorba
Digitální učební materiál
 Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Obecná rovnice kvadratické funkce : y = ax 2 + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených funkcí je množina reálných čísel.
 5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
Přílohy. Příloha 1. Obr. P1.1 Zadání úlohy v MS Excel
 Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel 2007. Výpočet budeme demonstrovat
Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel 2007. Výpočet budeme demonstrovat
8.1. Separovatelné rovnice
 8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Gymnázium Vysoké Mýto nám. Vaňorného 163, Vysoké Mýto
 Gymnázium Vysoké Mýto nám. Vaňorného 163, 566 01 Vysoké Mýto Registrační číslo projektu Šablona Autor Název materiálu / Druh CZ.1.07/1.5.00/34.0951 III/2 INOVACE A ZKVALITNĚNÍ VÝUKY PROSTŘEDNICTVÍM ICT
Gymnázium Vysoké Mýto nám. Vaňorného 163, 566 01 Vysoké Mýto Registrační číslo projektu Šablona Autor Název materiálu / Druh CZ.1.07/1.5.00/34.0951 III/2 INOVACE A ZKVALITNĚNÍ VÝUKY PROSTŘEDNICTVÍM ICT
Fyzika 6. ročník. přesahy, vazby, mezipředmětové vztahy průřezová témata. témata / učivo. očekávané výstupy RVP. očekávané výstupy ŠVP
 očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
STATISTICA Téma 1. Práce s datovým souborem
 STATISTICA Téma 1. Práce s datovým souborem 1) Otevření datového souboru Program Statistika.cz otevíráme z ikony Start, nabídka Programy, podnabídka Statistika Cz 6. Ze dvou nabídnutých možností vybereme
STATISTICA Téma 1. Práce s datovým souborem 1) Otevření datového souboru Program Statistika.cz otevíráme z ikony Start, nabídka Programy, podnabídka Statistika Cz 6. Ze dvou nabídnutých možností vybereme
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Obr. P1.1 Zadání úlohy v MS Excel
 Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel. Výpočet budeme demonstrovat
Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel. Výpočet budeme demonstrovat
Obvodové prvky a jejich
 Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Příklady kmitavých pohybů. Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání Kinematika mechanického kmitání Vojtěch Beneš
 Mechanické kmitání Vojtěch Beneš Výstup RVP: Klíčová slova: žák užívá základní kinematické vztahy při řešení problémů a úloh o pohybech mechanické kmitání, kinematika, harmonický oscilátor Sexta Příprava
Mechanické kmitání Vojtěch Beneš Výstup RVP: Klíčová slova: žák užívá základní kinematické vztahy při řešení problémů a úloh o pohybech mechanické kmitání, kinematika, harmonický oscilátor Sexta Příprava
rovnic), Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =
, Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =") Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Funkce a lineární funkce pro studijní obory
 Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Numerické řešení diferenciálních rovnic
 Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
KOMPLEXNÍ ČÍSLA INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
 KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
Elektromagnetický oscilátor
 Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
úloh pro ODR jednokrokové metody
 Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1
 okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1") ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
CVIČNÝ TEST 22. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 22 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Kontroloři Státní zemědělské a potravinářské inspekce
CVIČNÝ TEST 22 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Kontroloři Státní zemědělské a potravinářské inspekce
SCLPX 11 1R Zákon zachování mechanické energie
 Klasické provedení a didaktické aspekty pokusu Zákony zachování mají ve fyzice významné postavení. V učivu mechaniky se na střední škole věnuje pozornost zákonu zachování hybnosti a zákonu zachování energie
Klasické provedení a didaktické aspekty pokusu Zákony zachování mají ve fyzice významné postavení. V učivu mechaniky se na střední škole věnuje pozornost zákonu zachování hybnosti a zákonu zachování energie
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
KINEMATIKA HMOTNÉHO BODU. Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník
 KINEMATIKA HMOTNÉHO BODU Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Kinematika hmotného bodu Kinematika = obor fyziky zabývající se pohybem bez ohledu na jeho příčiny Hmotný bod - zastupuje
KINEMATIKA HMOTNÉHO BODU Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Kinematika hmotného bodu Kinematika = obor fyziky zabývající se pohybem bez ohledu na jeho příčiny Hmotný bod - zastupuje
Mechanika - kinematika
 Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
CVIČNÝ TEST 24. OBSAH I. Cvičný test 2. Mgr. Kateřina Nováková. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P02 DYNAMIKA HMOTNÉHO BODU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. Ing. Bohumil Koktavý,CSc. FYZIKA PRŮVODCE GB01-P02 DYNAMIKA HMOTNÉHO BODU STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA 2 OBSAH
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. Ing. Bohumil Koktavý,CSc. FYZIKA PRŮVODCE GB01-P02 DYNAMIKA HMOTNÉHO BODU STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA 2 OBSAH
ROVNOMĚRNĚ ZRYCHLENÝ POHYB
 ROVNOMĚRNĚ ZRYCHLENÝ POHYB Pomůcky: LabQuest, sonda čidlo polohy (sonar), nakloněná rovina, vozík, který se může po nakloněné rovině pohybovat Postup: Nakloněnou rovinu umístíme tak, aby svírala s vodorovnou
ROVNOMĚRNĚ ZRYCHLENÝ POHYB Pomůcky: LabQuest, sonda čidlo polohy (sonar), nakloněná rovina, vozík, který se může po nakloněné rovině pohybovat Postup: Nakloněnou rovinu umístíme tak, aby svírala s vodorovnou
Lineární diferenciální rovnice 1. řádu verze 1.1
 Úvod Lineární diferenciální rovnice. řádu verze. Následující tet popisuje řešení lineárních diferenciálních rovnic. řádu. Měl by sloužit především studentům předmětu MATEMAT2 na Univerzitě Hradec Králové
Úvod Lineární diferenciální rovnice. řádu verze. Následující tet popisuje řešení lineárních diferenciálních rovnic. řádu. Měl by sloužit především studentům předmětu MATEMAT2 na Univerzitě Hradec Králové
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Využití programu MS Excel při výuce vlastností kvadratické funkce
 Využití programu MS Excel při výuce vlastností kvadratické funkce Martin Mikuláš Tabulkové kalkulátory lze ve škole velmi dobře využít při výuce matematiky. Lze v nich totiž snadno naprogramovat aplikace,
Využití programu MS Excel při výuce vlastností kvadratické funkce Martin Mikuláš Tabulkové kalkulátory lze ve škole velmi dobře využít při výuce matematiky. Lze v nich totiž snadno naprogramovat aplikace,
Vyřešením pohybových rovnic s těmito počátečními podmínkami dostáváme trajektorii. x = v 0 t cos α (1) y = h + v 0 t sin α 1 2 gt2 (2)
 y = h + v 0 t sin α 1 2 gt2 (2)") Test a. Lučištník vystřelil z hradby vysoké 40 m šíp o hmotnosti 50 g rychlostí 60 m s pod úhlem 5 vzhůru vzhledem k vodorovnému směru. (a V jaké vzdálenosti od hradeb se šíp zabodl do země? (b Jaký úhel
Test a. Lučištník vystřelil z hradby vysoké 40 m šíp o hmotnosti 50 g rychlostí 60 m s pod úhlem 5 vzhůru vzhledem k vodorovnému směru. (a V jaké vzdálenosti od hradeb se šíp zabodl do země? (b Jaký úhel
Řešení "stiff soustav obyčejných diferenciálních rovnic
 Řešení "stiff soustav obyčejných diferenciálních rovnic Jiří Škvára Katedra fyziky, Přírodovědecká fakulta Univerzity J.E. Purkyně v Ústí n.l.. ročník, počítačové metody ve vědě a technice Abstrakt Seminární
Řešení "stiff soustav obyčejných diferenciálních rovnic Jiří Škvára Katedra fyziky, Přírodovědecká fakulta Univerzity J.E. Purkyně v Ústí n.l.. ročník, počítačové metody ve vědě a technice Abstrakt Seminární
4. Práce, výkon, energie a vrhy
 4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
příkladů do cvičení. V textu se objeví i pár detailů, které jsem nestihl (na které jsem zapomněl) a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.
 a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.") Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
3. Reálná čísla. většinou racionálních čísel. V analytických úvahách, které praktickým výpočtům
 RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny K nejvýznamnějším patří množina reálných čísel, obsahující jako podmnožiny množiny přirozených, celých, racionálních a iracionálních
RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny K nejvýznamnějším patří množina reálných čísel, obsahující jako podmnožiny množiny přirozených, celých, racionálních a iracionálních
ODR metody Runge-Kutta
 ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
Pohyb tělesa po nakloněné rovině
 Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
 Interpolace Uvažujme třídu funkcí jedné proměnné ψ(x; a 0,..., a n ), kde a 0,..., a n jsou parametry, které popisují jednotlivé funkce této třídy. Mějme dány body x 0, x 1,..., x n, x i x k, i, k = 0,
Interpolace Uvažujme třídu funkcí jedné proměnné ψ(x; a 0,..., a n ), kde a 0,..., a n jsou parametry, které popisují jednotlivé funkce této třídy. Mějme dány body x 0, x 1,..., x n, x i x k, i, k = 0,
Měření tíhového zrychlení matematickým a reverzním kyvadlem
 Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
2. Numerické výpočty. 1. Numerická derivace funkce
 2. Numerické výpočty Excel je poměrně pohodlný nástroj na provádění různých numerických výpočtů. V příkladu si ukážeme možnosti výpočtu a zobrazení diferenciálních charakteristik analytické funkce, přičemž
2. Numerické výpočty Excel je poměrně pohodlný nástroj na provádění různých numerických výpočtů. V příkladu si ukážeme možnosti výpočtu a zobrazení diferenciálních charakteristik analytické funkce, přičemž
Rychlost, zrychlení, tíhové zrychlení
 Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Určení hmotnosti zeměkoule vychází ze základního Newtonova vztahu (1) mezi gravitačním zrychlením a g a hmotností M Z gravitačního centra (Země).
 mezi gravitačním zrychlením a g a hmotností M Z gravitačního centra (Země).") Projekt: Cíl projektu: Určení hmotnosti Země Místo konání: Černá věž - Klatovy, Datum: 28.10.2008, 12.15-13.00 hod. Motto: Krása středoškolské fyziky je především v její hravosti, stejně tak jako je krása
Projekt: Cíl projektu: Určení hmotnosti Země Místo konání: Černá věž - Klatovy, Datum: 28.10.2008, 12.15-13.00 hod. Motto: Krása středoškolské fyziky je především v její hravosti, stejně tak jako je krása
Postup: Nejprve musíme vyplnit tabulku. Pak bude vypadat takto:
 Úkol: Jednoduchá tabulka v Excelu Obrázky jsou vytvořené v Excelu verze 2003 CZ. Postupy jsou platné pro všechny běžně dostupné české verze Excelu s výjimkou verze roku 2007. Postup: Nejprve musíme vyplnit
Úkol: Jednoduchá tabulka v Excelu Obrázky jsou vytvořené v Excelu verze 2003 CZ. Postupy jsou platné pro všechny běžně dostupné české verze Excelu s výjimkou verze roku 2007. Postup: Nejprve musíme vyplnit
Projekt OPVK - CZ.1.07/1.1.00/ Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ..07/..00/6.007 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: Goniometrické funkce Autor: Ondráčková
Projekt OPVK - CZ..07/..00/6.007 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: Goniometrické funkce Autor: Ondráčková
Praktikum I Mechanika a molekulová fyzika
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum I Mechanika a molekulová fyzika Úloha č. XIX Název: Pád koule ve viskózní kapalině Pracoval: Matyáš Řehák stud.sk.: 16 dne:
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum I Mechanika a molekulová fyzika Úloha č. XIX Název: Pád koule ve viskózní kapalině Pracoval: Matyáš Řehák stud.sk.: 16 dne:
Otázku, kterými body prochází větev implicitní funkce řeší následující věta.
 1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
Diferenciální počet 1 1. f(x) = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.
 = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.") Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Měření součinitele smykového tření dynamickou metodou
 Měření součinitele smykového tření dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=6 Měření smykového tření na nakloněné rovině pomocí zvukové karty řešil např. Sedláček [76]. Jeho konstrukce
Měření součinitele smykového tření dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=6 Měření smykového tření na nakloněné rovině pomocí zvukové karty řešil např. Sedláček [76]. Jeho konstrukce
Postup při řešení matematicko-fyzikálně-technické úlohy
 Postup při řešení matematicko-fyzikálně-technické úlohy Michal Kolesa Žádná část této publikace NESMÍ být jakkoliv reprodukována BEZ SOUHLASU autora! Poslední úpravy: 3.7.2010 Úvod Matematicko-fyzikálně-technické
Postup při řešení matematicko-fyzikálně-technické úlohy Michal Kolesa Žádná část této publikace NESMÍ být jakkoliv reprodukována BEZ SOUHLASU autora! Poslední úpravy: 3.7.2010 Úvod Matematicko-fyzikálně-technické
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole
 5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
Zdeněk Halas. Aplikace matem. pro učitele
 Obyčejné diferenciální rovnice Nejzákladnější aplikace Zdeněk Halas KDM MFF UK, 2011 Aplikace matem. pro učitele Zdeněk Halas (KDM MFF UK, 2011) Obyčejné diferenciální rovnice Aplikace matem. pro učitele
Obyčejné diferenciální rovnice Nejzákladnější aplikace Zdeněk Halas KDM MFF UK, 2011 Aplikace matem. pro učitele Zdeněk Halas (KDM MFF UK, 2011) Obyčejné diferenciální rovnice Aplikace matem. pro učitele
Fázorové diagramy pro ideální rezistor, skutečná cívka, ideální cívka, skutečný kondenzátor, ideální kondenzátor.
 FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických
FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických