Příklady k přednášce 25 Dopravní zpoždění
|
|
|
- Martin Sedláček
- před 8 lety
- Počet zobrazení:
Transkript
1 Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení

2 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { f t } { } t f(): t f() t = t <, L f() t = e f() t dt = f( ) f( t τ): τ >, L ( τ) =? t f( t τ) = e f( t τ) dt t τ = v = e τ τ e τ f() f () v dv τ v = e e f () v dt τ v = e e f() v dt = τ τ e L { δ( t τ) } = e,l { ( t τ) } =, Michael Šebek ARI
 v dt = τ τ e L { δ( t τ) } = e,l { ( t τ) } =, Michael Šebek")
3 Příklad: Válcovací tolice dopravní zpoždění na výtupu přeno τ H(, e ) = G() e τ tedy obahuje dynamiku bez zpoždění + zpoždění 3

4 Příklad: Páový dopravník Těžba fofátu v Bou Craa, Západní Sahara: km ytém dopravníků Bangladéš: pá 7 km 4

5 Příklad: Regulace v buňce x () t = λ x () t + c x ( t τ ) 2 ( τ ) x () t = λ x () t + g x ( t )
 t + g x ( t ) 2 2 2")
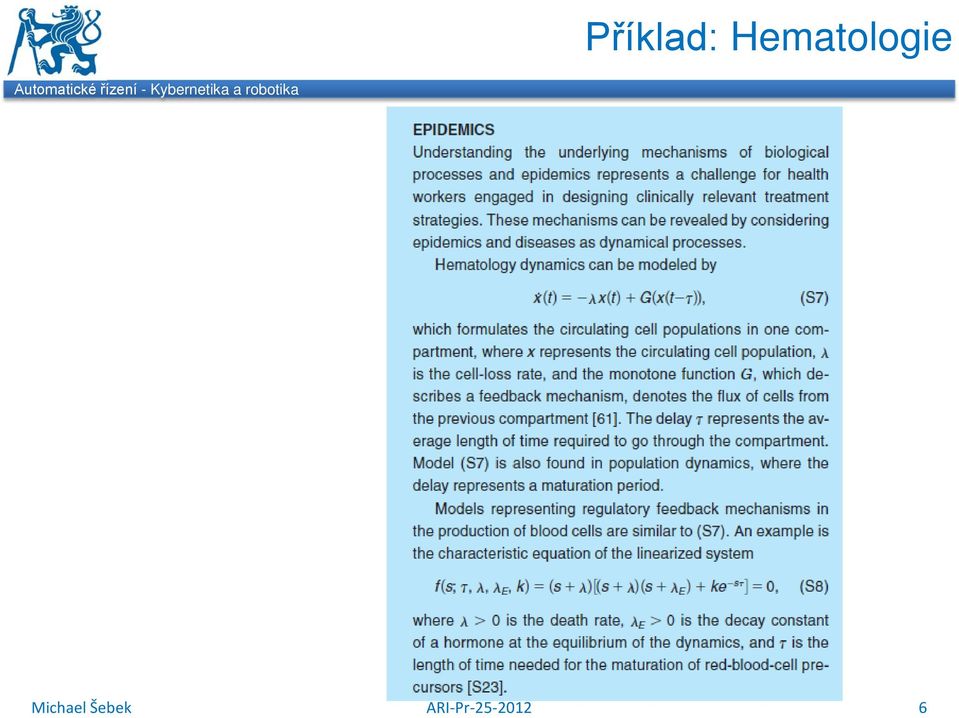
6 Příklad: Hematologie 6
7 Příklad: Mechanimu aktivace enzymu 7

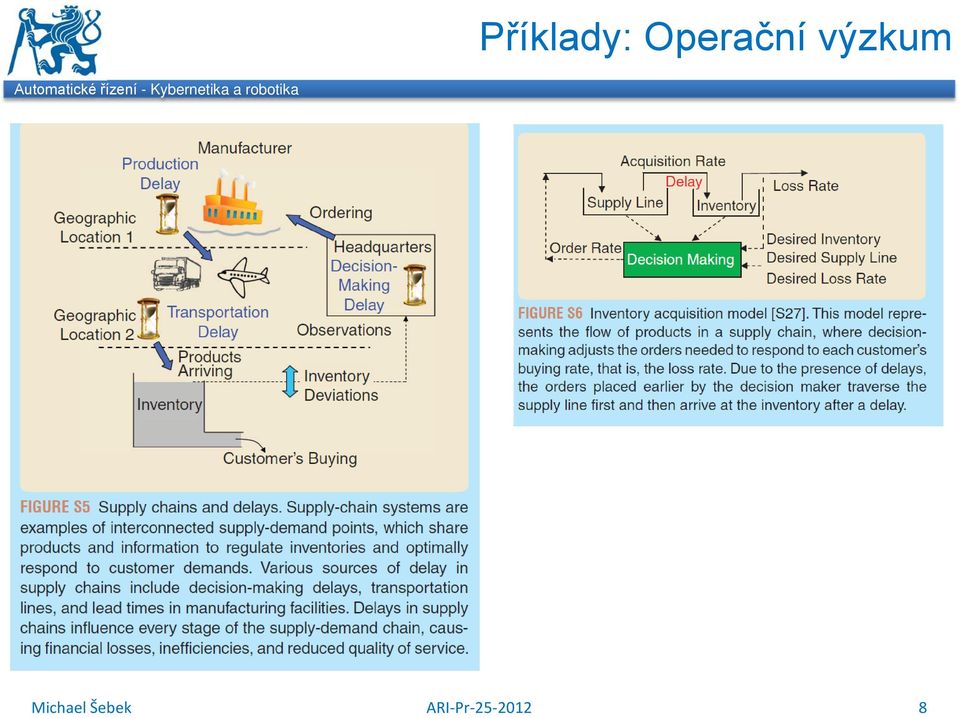
8 Příklady: Operační výzkum 8
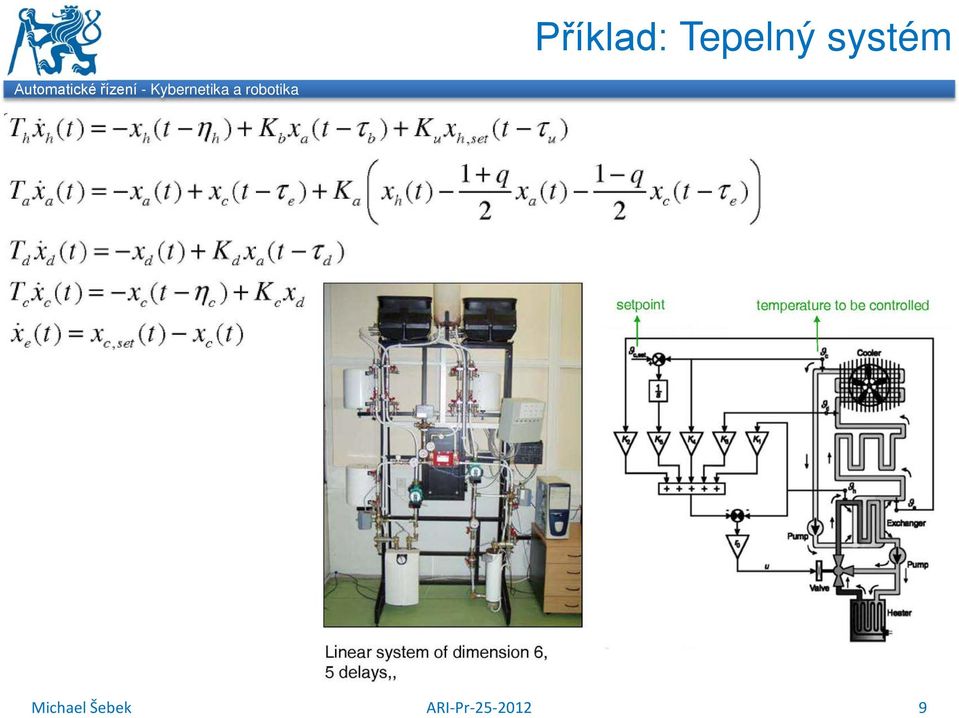
9 Příklad: Tepelný ytém 9
10 Příklad: Síťové řídicí ytémy

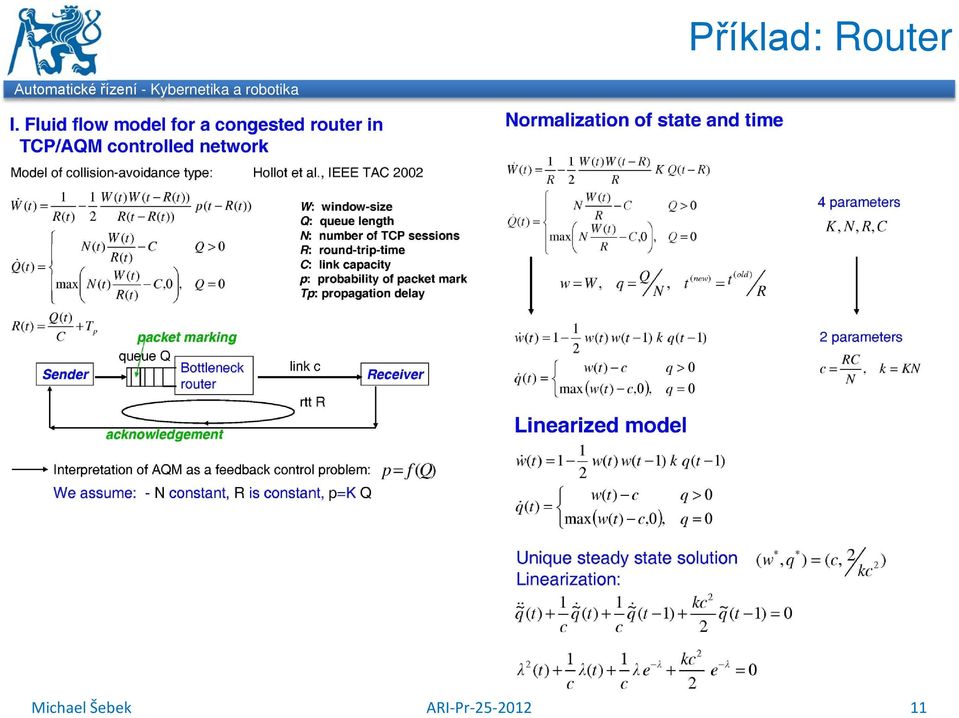
11 Příklad: Router
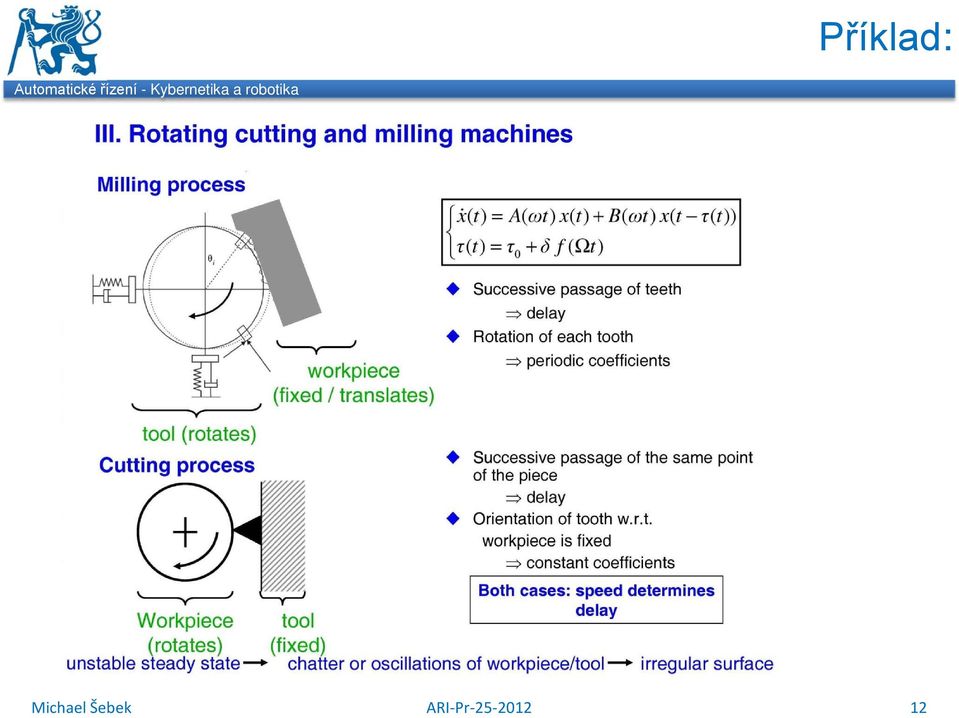
12 Příklad: 2
13 Čité zpoždění v Matlabu >> D = tf(,,'inputdelay',) Tranfer function: exp(-*) * () >> = tf(''); D = exp(-) Tranfer function: exp(-) * () D () = e >> tep(tf(),d) >> bode(d) >> nyquit(d) Amplitude.5.5 Step Repone Time (econd) Nyquit Diagram Magnitude (db) Bode Diagram Imaginary Axi Phae (deg) Frequency (rad/) Real Axi
 -9-8 -27-36 -45-54 -63 Frequency (rad/) - -.8 -.6 -.4 -.2.2.4.6.8 Real Axi 3 -.")
14 Sytém e zpožděním na vtupu/výtupu v Matlabu >> G = tf(,[ ],'InputDelay',2.) Tranfer function: exp(-2.*) * >> G = tf(,[ ],'OutputDelay',2.); >> = tf('');gg= /(+); G = exp(-2.*)*gg; G () Amplitude = + e 2..2 Magnitude (db) Bode Diagram Imaginary Axi Time (econd) Nyquit Diagram Phae (deg) Frequency (rad/) Real Axi
 Nyquit Diagram..8.6.4.2 -.2 -.4 Phae (deg) -36-54 -72-9 4 - Frequency (rad/) -.6 -.8 -. -.2 -.5 -.")
15 Sytém vnitřním zpožděním v Matlabu >> = tf('');gg= /(+); >> G = exp(-2.*)*gg; >> T=G/(+G)... Output delay (econd): 2. Internal delay(econd):2. Continuou-time model. >> tep(t) T() e = + + e + 2. e = + + e p tude Step Repone Time (econd) Nyquit Diagram Bode Diagram.5 Magnitude (db) Imaginary Axi..5 Phae (deg) Real Axi Frequency (rad/) 5
 -8-36 -54-72 -9-8 -.5 -. -. -.8 -.6 -.4 -.2.2.4.6.8. Real Axi -26 - Frequency (rad/) 5")
16 Příklad: Složitější ytémy.4 H(, e ) e = + + Step Repone e >> delay=tf();et(delay,'iodelay',) >> E=tf(delay),S=tf(); Tranfer function: exp(-*) * () >> H=E/(S+a+S*b*E),tep(H,2) Amplitude Time (econd) Imaginary Axi Nyquit Diagram db 2 db-2 db Phae (deg) Magnitude (db) Bode Diagram Real Axi 6
 Imaginary Axi 9 8 7 6 5 2 Nyquit Diagram db 2 db-2 db Phae (deg)")
17 Příklad: Složitější ytémy H.2. 3 (, e, e ).2 e = + e + 2e.3. 2 Nyquit Diagram 2 >> delay2=tf();et(delay2,'iodelay',.2) >> delay3=tf();et(delay3,'iodelay',.3) >> H=E2/(S+E3+2*E2);tep(H,2) >> E2=tf(delay2),E3=delay3,S=tf(); Tranfer function: exp(-.2*) * () Tranfer function: exp(-.3*) * () >> H=E2*S/(S+E3+2*E2);tep(H,2) Step Repone.5 Imaginary Axi Magnitude (db) - -2 Bode Diagram Amplitude Real Axi x Time (econd) Frequency (rad/) 7
 - -2 Bode Diagram Amplitude.6.4 -.5-2 -.5 - -.5.5.5 2 Real Axi -3 4.68 x 4.2-4.68-9.26 -.2.2.4.6.8.2.4.6.8 2 Time (econd) -3.")
18 Pro zajímavot: Lambertova funkce Lambertova W-funkce (také omega funkce) je inverzní funkce k f ( W ) = We v reálném oboru rozumná, ale v komplexním divoká (nekonečně mnoho větví) W reálná a imaginární čát Lambertovy funkce (analytického prodloužení) 8
 http://mathworld.wolfram.com/lambertw-function.")
19 Příklad: Retardovaný a neutrální ytém Retardovaný ytém c () = + e CL 8 >> olve('exp(-tau*x)+x=') an = lambertw(, -tau)/tau >> tau=, r=lambertw(-:,-tau)./tau; >> plot(real(r),imag(r),'+r') Neutrální ytém c () = e + CL >> olve('+exp(-tau*x)*x=') an = -lambertw(, tau)/tau >> tau=, r=-lambertw(-:,tau)./tau; >> plot(real(r),imag(r),'+b') 9
*x=') an = -lambertw(, tau)/tau >> tau=, r=-lambertw(-:,tau).")
20 Podmínky tability jednoduchého kvazipolynomu (Kharitonov et al., 24, p. 4) Sytém charakteritickým kvazipolynomem a (, e τ ) = + a + be τ kde a + b > (pokud ne, pak není tabilní ano bez zpoždění) je Stabilní nezávile na velikoti zpoždění ( iod ) právě když a b. Jinak b Pokud je a >, b >, je tabilní π arcco ( a b ) τ < b a Pokud je a <, b >, je tabilní τ < Michael Šebek arcco ( a b ) b a ARI-Pr a 2 3 2
 τ < 2 2 3 2 b a Pokud je a <, b >, je tabilní τ <")
21 Příklad: Detabilizující efekt zpoždění G() =, C() = Ke τ c () = + Ke CL τ τ = : = K { i} { } + τ = : max Re <<< τ = : max Re i 8 x τ =, τ =, τ = >> olve('x+k*exp(-tau*x)=') an = lambertw(, -k*tau)/tau >> k=,tau=.5 >> r=lambertw(-:,-k*tau)/tau; >> plot(real(r),imag(r),'+r') max Re { } i τ c τ τ =.5 τ c =.578 τ =
22 Příklad: Stabilizující efekt zpoždění 2 CL( ) = c e τ je netabilní pro τ =, ale tabilní pro malá nenulová zpoždění Srovnej jeho odezvu použitím PD regulátoru 22
23 Soutava rovnicí yt (). yt () + yt () = ut () je netabilní. Můžeme ji tabilizovat derivační ZV zeílením u() t = ky () t Alternativně ji můžeme tabilizovat zpožděnou ZV ut () = yt ( τ ) yt () Což můžeme interpretovat jako ZV konečnou diferencí yt () yt ( τ ) ut () = τ τ Aproximujícím derivaci Příklad: Zpoždění jako derivační ZV k τ k = τ =.2 τ =.5 k >. Step Repone =
24 Padého Aproximace Henri Eugene Padé - francouzký matematik ( ) dne znám hlavně jako autor aproximace obecné funkce pomocí racionální funkce, která je čato lepší než Taylorova Padého aproximace pro danou funkci f a přirozená číla m,n je Padého aproximant řádu (m,n) Rx ( ) = 2 m p + px + px pmx 2 n + qx + qx qx n kde f f() = R() f () = R () f () = R () () = R () ( m + n) ( m + n) oučet prvních m+n+ členů Taylorových řad f a R je tejný 24
25 Příklad: Padého aproximace >> del=tf(); >> et(del,'iodelay',5); del Tranfer function: exp(-5*) * >> pade=pade(del,) Tranfer function: >> pade2=pade(del,2) Tranfer function: ^ ^ >> pade3=pade(del,3) Tranfer function: -^ ^ ^ ^ >> tep(del,pade,pade2,pade3) >> bode(del,pade,pade2,pade3) exp(t) (,) (2,2) (3,3) 25
26 Příklad na přený návrh: P regulátor pro K τ G () = e, C () = K je p T + T() = KK e τ ( T + ) + KK e p p τ a pro hodnoty K = T = τ =, K P = 2 je 2e T() = CL charakteritický kvazipolynom je + + 2e c () = + + 2e CL Pro K = 5 je c () = + + 5e P CL >> olve('x++5*exp(-x)=') an = -+lambertw(-5*exp()) >> r=-+lambertw(-:,-5*exp()); >> plot(real(r),imag(r),'*') >> olve('x++2*exp(-x)=') an = -+lambertw(-2*exp()) >> r=-+lambertw(-:,-2*exp()); >> plot(real(r),imag(r),'*') 26
27 Příklad: CL tabilita G () C () T() b = e + a = k τ GC () () = + GC () () kb e τ = + a kb e + + a τ kbe = + a + kbe τ τ Michael Šebek ARI
28 Příklad na přený návrh I regulátorem Pro je a pro hodnoty K G () =, C () = T + T() T() = I T I τ Ke = T ( T + ) + Ke τ K = TI = T = τ = e ( + ) + e.e+2 * i i i i i i i i i i i i i i i i i CL charakteritický kvazipolynom 2 ccl() = + + e má nekonečně mnoho kořenů čát kořenů nad reálnou oou 28
29 Příklad: Smithův prediktor P regulátor e zeílením 2 T() 2 = + + 2e e T() 2 = e
30 Příklad: Smithův prediktor P regulátor e zeílením 5 T() 5 = + + 5e e 5 5 T() 5 = + 6 e po odpojení větve bez prediktoru 3
31 Příklad: Smithův prediktor I regulátor a Smithův prediktor 3
32 Příklad: Netabilní outava Smithův prediktor nefunguje pro netabilní outavu! Proč?.5 Ale např. b () e přeto můžeme tabilizovat Pro toto konkrétní zpoždění, iod to nejde P-regulátor e zeílením k =.5 dává tabilní c ( ) = +.5e CL T() = G ().5e +.5e = = a () >> G=(/(-)); >> et(g,'iodelay',.5) >> T=feedback(.5*G,) >> tep(g,t,9) >> olve('x + 3/(2*exp(x/2)) - = ') an = 2*lambertw(, -3/(4*exp(/2))) + >> pol=2*lambertw(-:,-3/(4*exp(/2)))+; >> plot(real(pol),imag(pol),'+r'),grid 32
33 Netabilní outava b () + e G () = = a () e Char. kvazipolynom ( ) ( ) Regulátor a CL Příklad: Přiřazení konečného počtu pólů e p () + + e q () = + >> olve('+exp(-x)=') an = pi*i >> zer=(pi.*(-:)); >> olve('x-exp(-x)=') an = lambertw(, ) >> pol=lambertw(-:,); >> plot(real(zer),imag(zer), 'ob',real(pol),imag(pol),'+r') q () = p ( ) T () = + e + Pro imulace pade(3,3) e = >> del=tf();et(del,'iodelay',); >> pade3=df(pade(del,3)); >> G=(+pade3)./(-pade3); >> T=(+pade3)./(+); >> tep(tf(g),tf(l),:.:8) Michael Šebek ARI-Pr
34 Příklady k přednášce 25 Sytémy proměnné v čae Michael Šebek Automatické řízení
35 Příklad: Houpačka dětká houpačka je kyvadlo rovnicí (tandardní předpoklady): d 2 ( ϕ) + mgl inϕ = dt ale délka je zde proměnná + + l= lt ( ) [ l, l ], L= ½( l + l ) tedy celkem (pozor při derivaci!) d 2 wing.mdl (() lt ϕ) + glt ()inϕ = dt 2l ϕ ginϕ ϕ + + = l l 35
36 Pro teoretické zkoumání označ. ν= lϕν, = l ϕ+ l ϕν, = lϕ+ 2l ϕ+ l ϕ a zjednodušíme rovnici inϕ ϕ 2l ϕ ginϕ ϕ + + = ν + ( g l) ν = l l l Doadíme lt ( ) L(+εco ωt), označíme ω ω 2 2 a dotaneme δ + εco t x = ω x, δ g ( Lω ) ν + ν = ε co t Použijeme aproximaci. řádu δ+ ε t δε = δ+ ( δε ) co t + v ε a dotaneme tzv. + εco t + εco Mathieuovu rovnici wingmat.mdl Ta má neomezené řešení pokud ε = δ = ¼ ω = Pokračování: Parametrická rezonance ( t ) ν + δ + ε( δ) co ν =., 2 g L t t x = dx dt = x co ( ) co t = 2x přirozená frekvence kyvadla 36 t
37 Stabilita LTV Pro lineární ytém proměnný v čae x = A() tx+ B() tu, x( t) y= C() tx+ Dtu () Je řešení je dáno tavovou maticí přechodu x() t = Φ(, tt) x( t) počáteční hodnotou t t Φ( t, t ) = I Definice tability je podobná jako u LTI, přeněji ekvilibrium v počátku je globálně tejnoměrně aymptoticky tabilní právě když Φ ( t t (, t t ) ke γ ), t t Stabilitu ale nelze charakterizovat vlatními číly matice A ani v případě, že jou tato číla kontantní! 37
38 Příklad: Stabilita LTV ytému LTV ytém 2. řádu A (otatní matice jou nulové) A() t 2 +.5co t.5in tcot = 2.5in tcot +.5in t má vlatní číla nezávilá na t a ležící v levé polorovině» ym t» A=[-+.5*co(t)^2,-.5*in(t)*co(t);--.5*in(t)*co(t),-+.5*in(t)^2] A = [ -+3/2*co(t)^2, -3/2*in(t)*co(t)] [ --3/2*in(t)*co(t), -+3/2*in(t)^2]» eig(a) an = [ -/4+/4*i*7^(/2)] [ -/4-/4*i*7^(/2)] Tedy by e zdálo, že je ytém tabilní? 38
39 Přitom ale je neboť Φ( t,) Příklad: Stabilita LTV ytému.5t t e cot e in t =.5t t e in t e cot» PHI=[exp(t/2)*co(t),exp(-t)*in(t);-exp(t/2)*in(t),exp(-t)*co(t)] PHI =[ exp(/2*t)*co(t), exp(-t)*in(t)] [ -exp(/2*t)*in(t), exp(-t)*co(t)]» [implify(a*phi(:,)-diff(phi(:,),t)), implify(a*phi(:,2)-diff(phi(:,2),t))] an = [, ] [, ] Jelikož x( t) = Φ( t,) x() Tak zřejmě pp. libovolně blízko počátku, pro které řešení uteče do nekonečna - ytém je tedy netabilní Pro čaově proměnné ytémy vlatní číla nefungují! 39
Příklady k přednášce 25 Dopravní zpoždění
 Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 28 5-5-8 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { } t f(): t f() t = t
Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 28 5-5-8 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { } t f(): t f() t = t
25 Dopravní zpoždění. Michael Šebek Automatické řízení 2013 21-4-13
 5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
Doplňky k přednášce 23 Diskrétní systémy Diskrétní frekvenční charakteristiky
 Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
7 - Ustálený stav kmitavý a nekmitavý, sledování a zadržení poruchy
 7 - Utálený tav kmitavý a nekmitavý, ledování a zadržení poruchy Michael Šebek Automatické řízení 018 31-3-18 Automatické řízení - ybernetika a robotika zeílení ytému na frekvenci ω je G( jω) - viz amplitudový
7 - Utálený tav kmitavý a nekmitavý, ledování a zadržení poruchy Michael Šebek Automatické řízení 018 31-3-18 Automatické řízení - ybernetika a robotika zeílení ytému na frekvenci ω je G( jω) - viz amplitudový
Příklady k přednášce 16 - Pozorovatel a výstupní ZV
 Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
21 Diskrétní modely spojitých systémů
 21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
Příklady k přednášce 20 - Číslicové řízení
 Příklady k přednášce 0 - Čílicové řízení Micael Šebek Automatické řízení 07-4- Vzorkování: vzta mezi a z pro komplexní póly Spojitý ignál má Laplaceův obraz póly v, Dikrétní ignál má z-obraz αt yt ( )
Příklady k přednášce 0 - Čílicové řízení Micael Šebek Automatické řízení 07-4- Vzorkování: vzta mezi a z pro komplexní póly Spojitý ignál má Laplaceův obraz póly v, Dikrétní ignál má z-obraz αt yt ( )
8 - Geometrické místo kořenů aneb Root Locus
 8 - Geometrické míto kořenů aneb Root Locu Michael Šebek Automatické řízení 206 0-3-6 Metoda Root Locu Walter R. Evan, AIEE Tranaction, 948 Metoda root locu neboli geometrické míto kořenů vykreluje polohu
8 - Geometrické míto kořenů aneb Root Locu Michael Šebek Automatické řízení 206 0-3-6 Metoda Root Locu Walter R. Evan, AIEE Tranaction, 948 Metoda root locu neboli geometrické míto kořenů vykreluje polohu
11 - Regulátory. Michael Šebek Automatické řízení 2015 24-3-15
 - Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
- Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
Příklady k přednášce 2 - Spojité modely
 Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 5 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti -5-5 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 5 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti -5-5 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
s požadovaným výstupem w(t), a podle této informace generuje akční zásah u(t) do
, a podle této informace generuje akční zásah u(t) do") Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
Příklady k přednášce 6 - Spojování a struktury
 Příklad k přednášce 6 - Spojování a truktur Michael Šebek Automatické řízení 07 7-3-8 Automatické řízení - Kbernetika a robotika Zpětnovazební pojení tavových modelů Odvození obecného případu (značení
Příklad k přednášce 6 - Spojování a truktur Michael Šebek Automatické řízení 07 7-3-8 Automatické řízení - Kbernetika a robotika Zpětnovazební pojení tavových modelů Odvození obecného případu (značení
Automatizace Úloha č.1. Identifikace regulované soustavy Strejcovou metodou
 Automatizace Úloha č. Identifikace regulované outavy Strejcovou metodou Petr Luzar 008/009 Zadání. Zapojte regulační obvod reálnou tepelnou outavou a eznamte e monitorovacím a řídicím programovým ytémem
Automatizace Úloha č. Identifikace regulované outavy Strejcovou metodou Petr Luzar 008/009 Zadání. Zapojte regulační obvod reálnou tepelnou outavou a eznamte e monitorovacím a řídicím programovým ytémem
Vzorový test k přijímacím zkouškám do navazujícího magisterského studijního oboru Automatické řízení a informatika (2012)
") Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
( LEVEL 3 Laplaceova transformace jako nástroj řešení lineárních diferenciálních rovnic. )
") ( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
Frekvenční metody syntézy
 Frevenční metody yntézy Autor: etr Havel, havelp@fel.cvut.cz 23..25 Frevenční metody návrhu e naží upravit frevenční charateritiu otevřené myčy L ta, aby výledná frevenční charateritia uzavřené myčy T
Frevenční metody yntézy Autor: etr Havel, havelp@fel.cvut.cz 23..25 Frevenční metody návrhu e naží upravit frevenční charateritiu otevřené myčy L ta, aby výledná frevenční charateritia uzavřené myčy T
Příklady k přednášce 19 - Polynomiální metody
 Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 013 7-4-14 Opakování: Dělení polynomů: e zbytkem a bez Polynomy tvoří okruh, ale ne těleo (Okruh tvoří také celá číla, těleo
Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 013 7-4-14 Opakování: Dělení polynomů: e zbytkem a bez Polynomy tvoří okruh, ale ne těleo (Okruh tvoří také celá číla, těleo
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
11 - Regulátory. Michael Šebek Automatické řízení
 - Regulátory Michael Šebe Automaticé řízení 7 6-3-7 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
- Regulátory Michael Šebe Automaticé řízení 7 6-3-7 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
Příklady k přednášce 2 - Spojité modely
 Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 8 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti 9-6-8 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 8 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti 9-6-8 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
26 Nelineární systémy a řízení
 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík
 Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík Bakalářká práce 6 ABSTRAKT Abtrakt čeky Tato bakalářká práce e zabývá vzorovým vypracováním zápočtových protokolů polu návrhem zadání
Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík Bakalářká práce 6 ABSTRAKT Abtrakt čeky Tato bakalářká práce e zabývá vzorovým vypracováním zápočtových protokolů polu návrhem zadání
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a pozorovatelnost
 4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a pozorovatelnost Michael Šebek Automatické řízení 25 25-2-5 Stabilita obecně Automatické řízení - Kybernetika a robotika Stabilita obecně
4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a pozorovatelnost Michael Šebek Automatické řízení 25 25-2-5 Stabilita obecně Automatické řízení - Kybernetika a robotika Stabilita obecně
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
REGULACE EL. POHONŮ Stabilita a tlumení. Obr. 1. Schéma uzavřené regulační smyčky. Obr. 2. Ukazatele kvality regulace
 EP-egulace EP EGULACE EL. POHONŮ Stabilita a tlumení Obr.. Schéma uzavřené regulační myčky Obr.. Ukazatele kvality regulace V regulačních pohonech pouzujeme kvalitu regulace nejčatěji dle přechodové charakteritiky,
EP-egulace EP EGULACE EL. POHONŮ Stabilita a tlumení Obr.. Schéma uzavřené regulační myčky Obr.. Ukazatele kvality regulace V regulačních pohonech pouzujeme kvalitu regulace nejčatěji dle přechodové charakteritiky,
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Česká republika - ŽENY
 2012 Česká republika - ŽENY věk qx px lx dx Lx Tx ex Dx Cx Nx Mx Sx Rx 0 0.002338 0.997662 100000 234 99804 8088058 80.88 100 000.00 229.43 4 164 194.04 22 355.11 130 483 842.84 1 731 180.86 1 0.000144
2012 Česká republika - ŽENY věk qx px lx dx Lx Tx ex Dx Cx Nx Mx Sx Rx 0 0.002338 0.997662 100000 234 99804 8088058 80.88 100 000.00 229.43 4 164 194.04 22 355.11 130 483 842.84 1 731 180.86 1 0.000144
2016 Česká republika ŽENY (aktuální k )
") 2016 Česká republika ŽENY (aktuální k 27. 11. 2017) věk qx px lx dx Lx Tx ex Dx Cx Nx Mx Sx Rx 0 0.002462 0.997538 100 000.00 246.23 99787 8205207 82.05 100 000.00 243.07 5 066 877.57 34 975.90 176 922
2016 Česká republika ŽENY (aktuální k 27. 11. 2017) věk qx px lx dx Lx Tx ex Dx Cx Nx Mx Sx Rx 0 0.002462 0.997538 100 000.00 246.23 99787 8205207 82.05 100 000.00 243.07 5 066 877.57 34 975.90 176 922
Příklady k přednášce 26 Nelineární systémy a řízení
 Příklady k přednášce 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 14 18-5-15 DC motor s omezením - odezva na rampu, sinus a součet rampa+sinus nefunguje superpozice ne-věrnost frekvence
Příklady k přednášce 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 14 18-5-15 DC motor s omezením - odezva na rampu, sinus a součet rampa+sinus nefunguje superpozice ne-věrnost frekvence
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Příklady k přednášce 19 - Polynomiální metody
 Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 016 15-4-17 Dělení polynomů: e zbytkem a bez Polynomy netvoří těleo (jako reálná číla, racionální funkce, ) ale okruh (jako
Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 016 15-4-17 Dělení polynomů: e zbytkem a bez Polynomy netvoří těleo (jako reálná číla, racionální funkce, ) ale okruh (jako
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL
 IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus
 Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus Michael Šebek Automatické řízení 018 1-3-18 Automatické řízení - Kybernetika a robotika Pro bod na RL platí (pro nějaké K>0) KL( s) = (k
Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus Michael Šebek Automatické řízení 018 1-3-18 Automatické řízení - Kybernetika a robotika Pro bod na RL platí (pro nějaké K>0) KL( s) = (k
Příklady k přednášce 3 - Póly, nuly a odezvy
 Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 08 9-6-8 Nuly přeou Automatické řízeí - Kyberetika a robotika Pro přeo G ( ) = ( + ) ( + ) pólem = a ulou z = porovejme odezvy
Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 08 9-6-8 Nuly přeou Automatické řízeí - Kyberetika a robotika Pro přeo G ( ) = ( + ) ( + ) pólem = a ulou z = porovejme odezvy
Příklady k přednášce 3 - Póly, nuly a odezvy
 Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 06 9--6 Schurův doplěk - odvozeí Automatické řízeí - Kyberetika a robotika Obecě ( + l) ( + l) ( + l) ( + m) ( + m) ( + m) I 0
Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 06 9--6 Schurův doplěk - odvozeí Automatické řízeí - Kyberetika a robotika Obecě ( + l) ( + l) ( + l) ( + m) ( + m) ( + m) I 0
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
24 - Diskrétní řízení
 24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
Identifikace systémů
 Identifikace systémů Přednáška 2 Osvald Modrlák, Lukáš Hubka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Identifikace systémů Přednáška 2 Osvald Modrlák, Lukáš Hubka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
12 - Frekvenční metody
 12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Vysokofrekvenční obvody s aktivními prvky
 Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
Západočeská univerzita. Lineární systémy 2
 Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Laplaceova transformace
 Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým
 Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Modelování a simulace
 Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
ÚSTAV PRO VÝZKUM MOTOROVÝCH VOZIDEL s.r.o. TÜV Süddeutschland Holding AG TECHNICKÁ ZPRÁVA
 TÜV Süddeutchland Holding AG Lihovarká 12, 180 68 Praha 9 www.uvmv.cz TECHNICKÁ ZPRÁVA Metodika pro hodnocení vozidel v jízdních manévrech na základě počítačových imulací a jízdních zkoušek. Simulační
TÜV Süddeutchland Holding AG Lihovarká 12, 180 68 Praha 9 www.uvmv.cz TECHNICKÁ ZPRÁVA Metodika pro hodnocení vozidel v jízdních manévrech na základě počítačových imulací a jízdních zkoušek. Simulační
3 - Póly, nuly a odezvy
 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 8 9-6-8 Automatické řízeí - Kyberetika a robotika Póly přeou a póly ytému Póly přeou jou kořey jmeovatele pro g () = b () a () jou to komplexí číla
3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 8 9-6-8 Automatické řízeí - Kyberetika a robotika Póly přeou a póly ytému Póly přeou jou kořey jmeovatele pro g () = b () a () jou to komplexí číla
Diferenˇcní rovnice Diferenciální rovnice Matematika IV Matematika IV Program
 Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Úvod. Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali
 NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
Tlumené a vynucené kmity
 Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
13. Kvadratické rovnice 2 body
 13. Kvadratické rovnice 2 body 13.1. Rovnice x 2 + 2x + 2 m = 0 (s neznámou x) má dva různé reálné kořeny, které jsou oba menší než tři, právě a) m (1, 17), b) m = 2, c) m = 2 m = 5, d) m 2, 5, e) m >
13. Kvadratické rovnice 2 body 13.1. Rovnice x 2 + 2x + 2 m = 0 (s neznámou x) má dva různé reálné kořeny, které jsou oba menší než tři, právě a) m (1, 17), b) m = 2, c) m = 2 m = 5, d) m 2, 5, e) m >
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VOKÁ ŠKOLA BÁŇKÁ TECHNICKÁ NIVEZITA OTAVA FAKLTA TOJNÍ ZÁKLAD ATOMATICKÉHO ŘÍZENÍ 9. týden doc. Ing. enata ANEOVÁ, Ph.D. Otrava 03 doc. Ing. enata ANEOVÁ, Ph.D. Vyoká škola báňká Technická univerzita Otrava
VOKÁ ŠKOLA BÁŇKÁ TECHNICKÁ NIVEZITA OTAVA FAKLTA TOJNÍ ZÁKLAD ATOMATICKÉHO ŘÍZENÍ 9. týden doc. Ing. enata ANEOVÁ, Ph.D. Otrava 03 doc. Ing. enata ANEOVÁ, Ph.D. Vyoká škola báňká Technická univerzita Otrava
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU. Ing. Aleš Hrdlička
 VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Příklady k přednášce 26 Nelineární systémy a řízení
 Příklady k přednášce 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 018 9-6-18 Příklad: Nelineární stabilizace integrátoru Porovnejte lineární stabilizaci integrátoru = u } = x u = x s
Příklady k přednášce 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 018 9-6-18 Příklad: Nelineární stabilizace integrátoru Porovnejte lineární stabilizaci integrátoru = u } = x u = x s
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
15 - Stavové metody. Michael Šebek Automatické řízení
 15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
Soustavy lineárních rovnic
 Přednáška MATEMATIKA č 4 Katedra ekonometrie FEM UO Brno kancelář 69a, tel 973 442029 email:jirineubauer@unobcz 27 10 2010 Soustava lineárních rovnic Definice Soustava rovnic a 11 x 1 + a 12 x 2 + + a
Přednáška MATEMATIKA č 4 Katedra ekonometrie FEM UO Brno kancelář 69a, tel 973 442029 email:jirineubauer@unobcz 27 10 2010 Soustava lineárních rovnic Definice Soustava rovnic a 11 x 1 + a 12 x 2 + + a
Matematika 4 FSV UK, LS Miroslav Zelený
 Matematika 4 FSV UK, LS 2017-18 Miroslav Zelený 13. Diferenční rovnice 14. Diferenciální rovnice se separovanými prom. 15. Lineární diferenciální rovnice prvního řádu 16. Lineární diferenciální rovnice
Matematika 4 FSV UK, LS 2017-18 Miroslav Zelený 13. Diferenční rovnice 14. Diferenciální rovnice se separovanými prom. 15. Lineární diferenciální rovnice prvního řádu 16. Lineární diferenciální rovnice
Obsah Obyčejné diferenciální rovnice
 Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
ANALÝZA A KLASIFIKACE DAT. Institut biostatistiky a analýz
 ANALÝZA A KLASIFIKACE DAT prof. Ing. Jiří Holčík,, CSc. III. PŘÍZNAKOVÁ KLASIFIKACE - ÚVOD PŘÍZNAKOVÝ POPIS Příznakový obraz x zpracovávaných dat je vyjádřen n-rozměrným loupcovým vektorem hodnot x i,
ANALÝZA A KLASIFIKACE DAT prof. Ing. Jiří Holčík,, CSc. III. PŘÍZNAKOVÁ KLASIFIKACE - ÚVOD PŘÍZNAKOVÝ POPIS Příznakový obraz x zpracovávaných dat je vyjádřen n-rozměrným loupcovým vektorem hodnot x i,
Teorie systémů a řízení
 VYSOKÁ ŠKOLA BÁŇSKÁ ECHNICKÁ UNIVERZIA V OSRAVĚ FAKULA HORNICKO - GEOLOGICKÁ INSIU EKONOMIKY A SYSÉMŮ ŘÍZENÍ eorie ytémů a řízení Prof.Ing.Aloi Burý,CSc. OSRAVA 2007 Předmluva Studijní materiály eorie
VYSOKÁ ŠKOLA BÁŇSKÁ ECHNICKÁ UNIVERZIA V OSRAVĚ FAKULA HORNICKO - GEOLOGICKÁ INSIU EKONOMIKY A SYSÉMŮ ŘÍZENÍ eorie ytémů a řízení Prof.Ing.Aloi Burý,CSc. OSRAVA 2007 Předmluva Studijní materiály eorie
Komplexní analýza. Laplaceova transformace. Martin Bohata. Katedra matematiky FEL ČVUT v Praze
 Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Předmět A3B31TES/Př. 7
 Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Tlumené kmitání tělesa zavěšeného na pružině
 Tlumené kmitání tělesa zavěšeného na pružině Kmitavé pohyby jsou důležité pro celou fyziku a její aplikace, protože umožňují relativně jednoduše modelovat řadu fyzikálních dějů a jevů. V praxi ale na pohybující
Tlumené kmitání tělesa zavěšeného na pružině Kmitavé pohyby jsou důležité pro celou fyziku a její aplikace, protože umožňují relativně jednoduše modelovat řadu fyzikálních dějů a jevů. V praxi ale na pohybující
Pozorovatel, Stavová zpětná vazba
 Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Studijní opory k předmětu 6AA. 6AA Automatizace. Studijní opory k předmětu. Ing. Petr Pokorný 1/40 6AA AUTOMATIZACE 6AA - cvičení
 6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc.
 Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Matematika 2 LS 2012/13. Prezentace vznikla na základě učebního textu, jehož autorem je doc. RNDr. Mirko Rokyta, CSc. J. Stebel Matematika 2
 Matematika 2 13. přednáška Obyčejné diferenciální rovnice Jan Stebel Fakulta mechatroniky, informatiky a mezioborových studíı Technická univerzita v Liberci jan.stebel@tul.cz http://bacula.nti.tul.cz/~jan.stebel
Matematika 2 13. přednáška Obyčejné diferenciální rovnice Jan Stebel Fakulta mechatroniky, informatiky a mezioborových studíı Technická univerzita v Liberci jan.stebel@tul.cz http://bacula.nti.tul.cz/~jan.stebel
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Kapitola 11: Lineární diferenciální rovnice 1/15
 Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
14 - Moderní frekvenční metody
 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
Primitivní funkce a Riemann uv integrál Lineární algebra Taylor uv polynom Extrémy funkcí více prom ˇenných Matematika III Matematika III Program
 Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Matematická analýza 1b. 9. Primitivní funkce
 Matematická analýza 1b 9. Primitivní funkce 9.1 Základní vlastnosti Definice Necht funkce f je definována na neprázdném otevřeném intervalu I. Řekneme, že funkce F je primitivní funkce k f na I, jestliže
Matematická analýza 1b 9. Primitivní funkce 9.1 Základní vlastnosti Definice Necht funkce f je definována na neprázdném otevřeném intervalu I. Řekneme, že funkce F je primitivní funkce k f na I, jestliže
10 - Přímá vazba, Feedforward
 0 - Přímá vazba, Feedforward Michael Šebek Automatické řízeí 03 4--3 Motivace (FF podle Atroma) Automatické řízeí - Kberetika a robotika Už máme avržeu zpětovazebí čát Chceme zajitit přeo referece rový
0 - Přímá vazba, Feedforward Michael Šebek Automatické řízeí 03 4--3 Motivace (FF podle Atroma) Automatické řízeí - Kberetika a robotika Už máme avržeu zpětovazebí čát Chceme zajitit přeo referece rový
Matematika 5 FSV UK, ZS Miroslav Zelený
 Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Vedení tepla v MKP. Konstantní tepelné toky. Analogické úlohám statiky v mechanice kontinua
 Vedení tepla v MKP Stacionární úlohy (viz dále) Konstantní tepelné toky Analogické úlohám statiky v mechanice kontinua Nestacionární úlohy (analogické dynamice stavebních konstrukcí) 1 Základní rovnice
Vedení tepla v MKP Stacionární úlohy (viz dále) Konstantní tepelné toky Analogické úlohám statiky v mechanice kontinua Nestacionární úlohy (analogické dynamice stavebních konstrukcí) 1 Základní rovnice
Numerická matematika Písemky
 Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Příklad 1.3: Mocnina matice
 Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Základy teorie pravděpodobnosti
 Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
MATEMATIKA III. Olga Majlingová. Učební text pro prezenční studium. Předběžná verze
 Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE. Matematika 0A1. Cvičení, zimní semestr. Samostatné výstupy. Jan Šafařík
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu
![1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu](/thumbs/102/155926571.jpg "1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu") [M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
[M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
Vytvoření skriptů pro webové rozhraní předmětu Analýza a simulace technologických procesů
 Vytvoření kriptů pro webové rozhraní předmětu Analýza a imulace technologických proceů M-file for the Internet Interface Ued in the Subject Analyi and Simulation of Technological Procee. Petr Tomášek Bakalářká
Vytvoření kriptů pro webové rozhraní předmětu Analýza a imulace technologických proceů M-file for the Internet Interface Ued in the Subject Analyi and Simulation of Technological Procee. Petr Tomášek Bakalářká
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
Semestrální práce z předmětu Teorie systémů
 Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
Základy matematiky pro FEK
 Základy matematiky pro FEK 3. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 21 Co nás dneska čeká... Co je to soustava lineárních
Základy matematiky pro FEK 3. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 21 Co nás dneska čeká... Co je to soustava lineárních
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující