Souřadnicové systémy PROSTOROVÉ ROVINNÉ WGS84 ETRS89 ITRS S-JTSK UTM
|
|
|
- Zuzana Ševčíková
- před 7 lety
- Počet zobrazení:
Transkript
1 GNSS Luděk Žalud
2 Souřadnicové systémy PROSTOROVÉ WGS84 ETRS89 ITRS ROVINNÉ S-JTSK UTM
3 Globální prostorové s.s. Zeměkoule musí být aproximována nějakým tělesem koule rotační elipsoid geoid

4 Geoid Geoid je teoretické těleso, jehož povrch vždy protíná gravitační pole v pravých úhlech Používá se jako referenční objekt pro měření výšky
5 Geoid Fyzikální model povrchu Země při střední hladině světových oceánů. Je definován jako ekvipotenciální plocha vůči gravitaci tj. plocha se stejnou úrovní tíhového potenciálu, na kterou je vektor tíhového zrychléní kolmý. Zdroj: wikipedia.org
6 Geoid Geoid se vůči zemskému elipsoidu může lišit až o ±100m.
7 Elipsoid Geoid je matematicky příliš složitý objekt Je definován dvěma poloměry Rovníkový Osa od severního k jižnímu pólu
8 Rotační elipsoid Pouze dva parametry a rovníkový poloměr b polární poloměr Používá se dnes nejčastěji pro georeferenční systémy Latitude zeměpisná šířka Longitude zeměpisná délka Elevation výška Zero meridian nultý poledník prochází bývalou astronomickou observatoří v Greenwichi v Anglii Rovník nejdelší rovnoběžka, čára spojující body s nulovou zeměpisnoušířkou. Průsečnice zemského povrchu s rovinou, procházející středem Země a kolmou k zemské ose.

9 WGS-84 World Geocentric Sysem D, geocentricky položený, Kartézské souřadnice, pravotočivý Používaný v GPS

 východ západ Východní")
10 Zeměpisná šířka a délka Zeměpisná šířka (Latitude) od severu k jihu Severní polokoule s.š., angl. N Jižní polokoule j.š., angl. S Zeměpisná délka (Longitude) východ západ Východní polokoule v.d. Západní polokoule z.d. Ve stupních
11 Výška V metrech od referenčního (rotačního) elipsoidu Neukazuje tedy skutečnou nadmořskou výšku V ČR jde o rozdíl asi m vůči geoidu
12 Nevýhody globálních s.s. pro robotiku Dva údaje jsou ve stupních, jeden v metrech Přepočtený rozměr na metry u šířky a délky není stejný a souvisí se zeměpisnou šířkou V ČR je to přibližně: 1 vteřina šířky 30m 1 vteřina délky 20m Není možné jednoduše počítat vzdálenosti Problémy jsou i se vzájemnými azimuty
13 WGS84 World Geodetic System navržen speciálně pro GPS Vznikl v roce 1984, byl naposledy upraven v r. 2004) Středem je gravitační střed Země Nulový poledník umístěn 5,31 arc sec. od Greenwichského nultého poledníku (102,5m) Rovníková osa m Polární osa m Zploštění km, tj. 0,335% V Evropě používána obdoba ETRS89, pohybuje se s Evropskou deskou, zatímco WGS je vztažen k průměru pohybu desek na Zemi.
14 GNSS co to je? Global Navigation Satellite System služba umožňující za pomoci družic autonomní prostorové určování polohy s celosvětovým pokrytím 1. generace GPS, GLONASS, podpůrné SBAS, GBAS 2. generace GPS-III, Galileo, Compass
15 NAVSTAR GPS NAVSTAR GPS ( Navigation System by Timing and Ranging Global Positioning System) je radiofrekvenční navigační systém pracující v každém počasí s celosvětovým pokrytím Provozován americkým ministerstvem obrany Department of Defence (DoD)
16 GPS - historie Projekt navazuje na předchozí GNSS Transit ( ) Vývoj zahájen v roce testy na pozemních stanicích, experimentální přijímač vypuštění 11 družic 1979 návrh rozšířen z původních 18 na 24 družic 1980 začátek vypouštění družic s detekcí jaderných výbuchů (reakce na zákaz jaderných testů mezi USA a SSSR) 1990 válka v Zálivu dočasně deaktivována selektivní dostupnost (SA) nedostatek armádních přijímačů plná operační dostupnost (umístěno 24 družic) zrušení SA
17 GPS - princip Přijímač používá zprávy, které přijme pro zjištění doby letu signálu od satelitu Tyto doby současně se známou polohou satelitu jsou použity pro zjištění polohy přijímače pomocí triangulace Nezávislý výpočet může být opakován každých 6s Nepřímo může být spočtena rychlost a směr ze změny pozice
18 GPS - princip Známe-li čas přijetí zprávy tr, pak doba letu signálu je (tr-ti), vzdálenost překonaná paprskem Pi se vypočte z: Pi = (tr-ti)*c, Kde: i číslo satelitu c rychlost světla v prostředí

 http://en.wikipedia.")
19 GPS - triangulace Pro obecné určení polohy jsou třeba 4 satelity 3 pro určení polohy 1 pro určení času čas musí být určen a synchronizován velmi přesně měří se rychlost světla Ve speciálních případech stačí méně satelitů některé z proměnných musí být známy (známá předchozí pozice, známá nadmořská výška, )
20 Triangulace s časem
21 GPS 3 segmenty Kosmický Řídicí Uživatelský
22 GPS kosmický segment Původně projektován pro 24 družic (z toho 3 záložní), nyní je používáno 31, což je mezní počet pro současné kódování Družice nejsou geostacionární obíhají Zemi ve výšce Km na 6 kruhových drahách se sklonem 55 Dráhy jsou vzájemně posunuty o 60 Na každé dráze měly být původně 4 pravidelně rozmístěné satelity, nyní je 5-6 nepravidelně uspořádaných Doba oběhu družice kolem Země je 11h58m, rychlost km/h
23

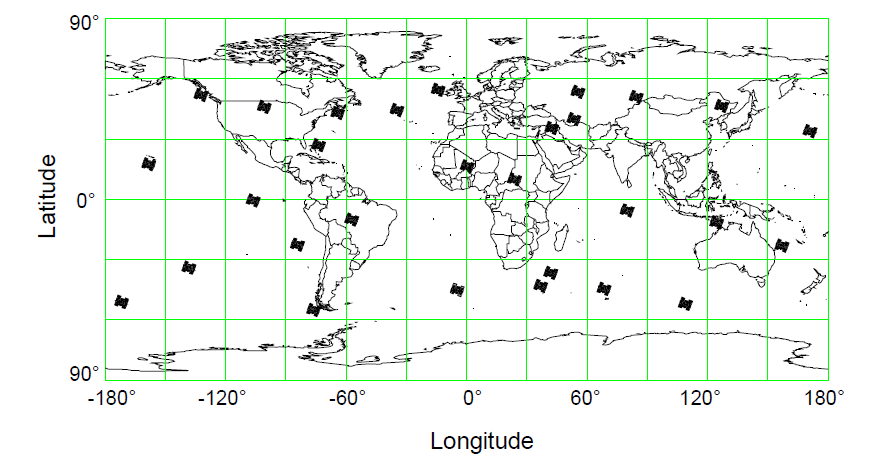
24 24h pohyb satelitu a jeho efektivní dosah
25
26 GPS - družice Z každého místa na zeměkouli jsou viditelné vždy alespoň čtyři satelity (rozumí se pochopitelně viditelnost a ideálních podmínek). Satelity mají i malé vyrovnávací raketové motory pro dorovnávací změny kurzu.
27 GPS - družice Hmotnost 1800 kg 3-4 atomové hodiny s rubidiovým nebo cesiovým oscilátorem 12 antén pro vysílání v L-pásmu ( GHz) Antény pro komunikaci s pozemními kontrolními stanicemi (2204,4 MHz) Antény pro vzájemnou komunikaci mezi družicemi (UHF) Optické, rentgenové a elektromagnetické snímače pro detekci jaderných výbuchů a startů balistických raket Solární panely a baterie
28 GPS historie a budoucnost - satelity Stav k Block Launch Period Satellite launches Success Failure In preparation Planned I Currently in orbit and healthy II IIA of the 19 launched IIR of the 13 launched IIR-M of the 8 launched IIF IIIA 2014? IIIB IIIC Total
29 GPS řídicí segment velitelství - Navstar Headquarters na letecké základně Los Angeles v Californii v USA řídicí středisko (MSC, Master Control Station), na letecké základně Schriever USAF v Colorado Springs, 2nd Space Operations Sq. záložní řídící středisko (BMCS, Backup Master Control Station) umístěné v Gaithersburg (Meryland, USA) přebírá cvičně 4 do roka řízení systému, v nouzi je připravena do 24hodin 3 povelové stanice (Ground Antenna), které jsou umístěny na základnách USAF: Kwajalein, Diego Garcia, Ascension Island případně i Cape Canaveral 18 monitorovacích stanic (Monitor Stations), které jsou umístěny na základnách USAF Řídící a kontrolní segment monitoruje kosmický segment, zasílá povely družicím, provádí jejich manévry a údržbu atomových hodin. Výsledek jejich monitoringu je zveřejňován v navigační zprávě každé družice a jejich platnost je řádově několik hodin
30 Signál - charakteristika GPS L MHz SPS (C/A Coarse Acquisition) nebo SPS (Standards Positioning Services), od bloku IIR-M možnost vysílat vojenský M kód GPS L MHz P(Y)-code PPS (Precision Positioning Service), od bloku IIR-M možnost vysílat vojenský M kód a civilní C kód GPS L MHz Od bloku IIR vysílá signály, které obsahují data monitorování startů balistických raket, detekci jaderných výbuchů a dalších vysokoenergetických zdrojů GPS L MHz Pro měření ionosférické refrakce, je možné dopřesnění pozice měřením zpoždění průchodu ionosférou na dvou kmitočtech GPS L MHz Plánován jako Safety-of-Life (SoL) signál,
31 GPS přenášené informace Čas, kdy byla zpráva vyslána Přesná orbitální informace daného satelitu (ephemeris) Stav systému, přibližné orbity všech satelitů (almanac)
32 Rádiové vysílání CDMA Code Division Multiple Access stejná frekvence pro všechny družice; používá se PNR (Pseudo Random Numbers) kódování; na základě znalosti tohoto kódu je možné signály od ostatních družic odfiltrovat používá GPS a Galileo FDMA Frequency Division Multiple Acces každá družice vysílá na unikátní frekvenci; je třeba velkého počtu frekvencí, vznikají interference používá GLONASS TDMA Time Division Multiple Access každá družice vysílá v jiném čase nepoužívá se
33 Kódování navigační zpráva Signál s nízkou frekvencí přidaný na L1 satelitní orbity, korekce času, stav satelitu
34 Kódování - PRC PRC - Pseudo Random Code složitý kód v binární soustavě podobný náhodnému Kód je unikátní pro každý satelit umožňuje jeho identifikaci korelací a zároveň určení doby šíření signálu, pro všechny satelity na jedné nosné Je složité tento signál zarušit Signál je vytvořen tak, aby bylo možné jej zesílit ze šumu malé antény za cenu velmi nízkého datového toku C/A Coarse Acquisition modulován na L1, 1MHz, 1023bitů civilní použití P Precise modulován na L1 a L2, 10MHz (mnohem přesnější) kryptován, pouze pro vojenské přijímače, dekryptovaný se značí Y, je složitější a hůře dosažitelný vojenské přístroje nejdříve zachytí C/A a potom P. Protože je modulován na dvě nosné, je možné použít sofistikované algoritmy pro eliminaci chyb šířením v atmosféře
35 Zpráva má 25 rámců o celkovém trvání 12,5 minut Rámec trvá 30 sekund, je složen z 1500 bitů a rozdělen na 5 subrámců po 300 bitech Datový tok je 50Hz

36
37 Efemerida astronomické určení polohy tělesa v čase, přesný čas, odhad zpoždění signálu v čase Almanac databáze dalších satelitních stanic
38 Určení pozice satelitu Díky výšce, ve které se pohybují je jejich pohyb velmi jednoduše popsatelný almanac Department of Defence (DOD) měří velmi přesně aktuální pozici satelitů (výška, pozice, rychlost) chyby efemeridy (orbity) gravitační ovlivnění měsícem, sluncem, solární radiací tato informace je pak vysílána ve zprávě
39 Zdroje chyb Rychlost šíření signálu Ionosféra (200km) nabité částice Troposféra (50km) vodní pára - mraky Modelování typického chování během dne Dvojí nosná drahé přijímače Multipath Budovy, příroda Pokročilé zpracování signálu Chyby vzniklé na satelitu Nepřesnosti atomových hodin SA šum přidaný do určení času, nepřesnosti orbitálních dat odstraněno
40 Chyby - srovnání Typická chyba [m] Standardní GPS Diferenciální GPS Hodiny na satelitu Chyby orbity Ionosféra Troposféra Šum přijímače Multipath
41 SA Selective Availability 24h data, květen 2000, Kentucky USA pův. plánováno do r
42 Pojmy Almanac - A set of parameters included in the GPS satellite navigation message that a receiver uses to predict the approximate location of a satellite. The almanac contains information about all of the satellites in the constellation. accuracy. How close a fix comes to the actual position. acquisition. The ability to find and lock on to satellite signals for ranging.
43 GPS - zajímavosti Pokud by došlo ke zničení pozemních stanic řídicího segmentu, přejdou družice do režimu AUTONAV (Autonomous Navigation Mode), ve kterém jsou schopny pracovat automaticky až 6 měsíců. Režim nikdy nenastal a neví se jestli a jak byl testován. Řídicí segment vydává zprávy GPS NANU (Notice Advisory to NAVSTAR Users), kde jsou zveřejněny odstávky družic, zpětné informace o stavu družic, atd. Z USA nesmí být expertovány GPS přijímače bez omezení výšky na 18 km a rychlosti 515 m/s navádění raket Při synchronizaci a výpočtech musí být počítáno i s relativistickými efekty (speciální TR - rychlost pohybu satelitu, obecná TR menší gravitace vlivem vzdálenosti od Země) a se Sagnacovým efektem vlivem otáčení Země
44 GPS V Česku je nejčastěji viditelnost na 8 družic, nejméně na 6, nejvíce na 12 (konec 2008)
45 GPS modernizace - GPSIII 1998 iniciováno Bílým domem, 2000 autorizováno U.S. kongresem pod názvem GPSIII Nové pozemní stanice, nové satelity s přidanými navigačními signály Vyšší přesnost a dosažitelnost Cílové datum 2013 Civilní L2 code Vojenský M code Safety of Life L MHz plánováno od IIF Nový L1 zesílení 1.5dB, lepší nosná (pro snazší RTK?), lepší kompatibilita s Galileo L1
46 L2C MHz Od IIR-M Zaměřeno na: měření zpoždění v ionosféře, vyšší spolehlivost v případě rušení Zpoždění v ionosféře je nyní největším zdrojem chyb Vznikne civilní dvojfrekvenční přijímač 2PRN sekvence CM (Civilian Moderate length) bitů, každých 20ms CL (Civilian Long length code) , každých 1500ms Datový tok bps, multiplexováno na bps CM modulováno navigační zprávou 25bps s forward error correction, CL je bez dat bude se dobře vyhledávat (24dB correlation protection ) O 2.3dB slabší než L1 C/A L2 má o 65% větší ionosférickou chybu
47 M-Code Především vyšší odolnost vůči rušení a horší prolomitelnost Přenášen na L1 a L2 většina výkonu mimo P(Y) a C/A Oproti P(Y) může být používán autonomně, tj. bez C/A Spot beam několik set km v průměru pro použití v určité oblasti zesílení od 20dB (100x větší výkon) 2 antény Bez spot beam od IIR-M, plně funkční u Block III
48 Diferenciální GPS Jeden ze způsobů jak zpřesnit výsledky GPS SBAS, GBAS V Česku Czepos 27 referenčních stanic kódová měření 0.25m, fázová 0.015m, cena cca 1kč/minuta On-line o off-line řešení
49 SBAS Satellite Based Augmentation System Rozšíření GNSS systému s velkým plošným rozsahem Satelity + několik pozemních stanic Na základě iniciativy ICAO (International Civil Aviation Organization) musí přenáíšet zprávy kompatibilní s americkým WAAS Cílem je zvýšit přesnost, dostupnost a spolehlivost Satelity jsou geostacionární Deviation Correction (DC)
50 WAAS Wide Area Augmentation System Severní Amerika a Havaj
51 Satellite Name & Details Atlantic Ocean Region-East ARTEMIS Europe Middle East Africa Indian Ocean from 2011: Sirius 5[2] EGNOS European Geostationary Navigation Overlay Service Podpora GPS, Glonass, Galileo Provozuje ESA, předstupeň Galileo část družic v testovacím provozu Od 2005, oficiální start (funkční) geostacionární satelity, síť >40 pozemních stanic, 4 kontrolní stanice Přibližná přesnost v praxi 2m (oficiálně 7m) Nízká elevace (30 ve střední Evropě) vhodné zejména pro letadla, problémy v urbanistických oblastech -> SISNeT NMEA / PRN Location Stav NMEA #33 / PRN #120 NMEA #37 / PRN #124 NMEA #39 / PRN #126 NMEA #44 / PRN # W 21.5 E vysílání testování 25 E vysílání 64.5 E 5.0 E nepoužívá se
 zpracování dat a výpočet korekcí, 6 NLES (Navigation Land Earth Stations) přeposílání dat na tři geostacionární satelitní")
52 EGNOS pozemní segment 34 RIMS (Ranging and Integrity Monitoring Stations) přijímají signál z US GPS satelitů, 4 MCC (Mission Control Centers) zpracování dat a výpočet korekcí, 6 NLES (Navigation Land Earth Stations) přeposílání dat na tři geostacionární satelitní transpondéry.
53 EGNOS - zpráva Stejná frekvence jako GPS L1, 500bps, FEC (forward error correction) Zpráva je dlouhá 250 bitů, z toho 212 data informace o integritě systému GPS dlouhodobé odchylky družic od jejich předpokládaných drah dlouhodobé a krátkodobé odchylky atomových hodin družic parametry pro ionosférický model pro Evropu almanach a navigační zpráva EGNOS družice
54 RTK Real-Time Kinematics carrier phase (vs. code phase u běžného měření) u GPS často označován Carrier-Phase Enhancement (CPGPS) Integer ambiguity Použitelné pro GPS, GLONASS, Galileo Jedna referenční stanice poskytuje korekční data v reálném čase až k centimetrové přesnosti
55 RTK - vysvětlení Běžná přesnost při korelaci je 1% šířky bitu Pro C/A u L1 GPS, kde je šířka bitu 0,98µs je to tedy cca 0,01µs, což představuje asi 3 metry U P(Y) kódu je 10x rychlejší spreding code, takže je tato principielní nepřesnost cca 30cm U L1 je délka vlny 19cm, přesnost měření vzdálenosti je tedy asi 1,9mm POZOR jde o teoretickou přesnost měření vzdáleností od satelitů bez všech dalších chyb
56 Chyby geometrické rozmístění družic Chybu měření obecně ovlivňuje rozmístění družic na hemisféře DOP (Dilution of Precision) HDOP Horizontální VDOP Vertikální PDOP prostorový TDOP časový GDOP geometrický V českých zemích lze očekávat průměrné hodnoty PDOP=1.9 s rozsahem
 tj.")
57 RTK - vysvětlení Největším problémem RTK je srovnání signálů GNSS spreading kódy jsou navrženy tak, aby srovnání bylo snadné a jednoznačné Chyby jsou tedy v násobcích vzdálenosti odpovídající délce vlny cca 19cm tzv. integer ambiguity problem Tento je řešen statisticky (komparací s C/A a vzdálenostmi od dalších satelitů) tj. řešení konverguje Typická potřebná doba asi 10 minut
58 RTK - vysvětlení V praxi jedna základnová stanice (Base Station) a více mobilních stanic (Rover) Base station přeposílá fázi nosné a ta je v Roveru porovnávána Obvyklá maximální přesnost 1cm ±2 ppm (parts per milion) horizontálně 2cm ±2 ppm vertikálně Virtual Reference Station (VRS) síť referenčních stanic, stanice je vypočtena přesnost závisí na četnosti stanic
59 RTK - typy Poplatné firemnímu řešení Magellan Běžné RTK Moving Base Teoreticky stejná přesnost jako běžná RTK Heading Dvě antény připevněny na vozidle, dva přijímače propojeny sériovou linkou Vzdálenost antén msí být známa s milimetrovou přesností Vzdálenost může být v řádu desítek metrů Přesnost je funkcí vzdálenosti lineárně stoupá se vzdáleností
60 RTK PDOP GPS-only RTK RTK potřeuje alespoň 6 satelitů nad 12 stupňů a PDOP (position dilution of precision) menší než 3.0 Velmi často je používán GLONASS a 2-frekvenční přístroje Do you or your crews experience GPS brownouts where you have to wait for the GPS constellation to change before you can continue using your GPS system?
61 A-GPS Použití především v mobilních telefonech je třeba připojení k síti Především zrychlení primární lokalizace, dále umožňení příjmu ve špatných podmínkách 2 hlavní přístupy: Zaslání podpůrných informací Almanac, ephemeris Přesný čas augmentation data? Off-board výpočet Server má kvalitní GPS data a dostatečný výpočetní výkon Často bývá kombinováno s dalšími systémy, např. triangulace pomocí známých pozic BTS
62 GPS - konfigurace Cena startu GPS satelitu je cca $150M V současnosti satelitů v operačním nasazení s tím, že některé jsou pouze párovány a nepodávají žádnou další informaci pro lokalizaci (paired orbits), slouží jako záloha krouží velmi blízko satelitů s největší pravděpodobností selhání V současnosti není příliš diskuse o vypouštění dalších satelitů, ale o jejich jiné konfiguraci
63 GPS konfigurace 24+3 Začátkem ledna 2010 byla ze strany U.S. Air Force nahlášena změna konfigurace satelitů GPS ze 21+3 na 24+3 Předpokládaný efekt: Zlepšené pokrytí v Afganistánu Více viditelných satelitů menší brownouty, důležité především pro RTK, kde je potřeba viditelnost alespoň 6 satelitů
64 GPS konfigurace Přemístěny jsou staré satelity SVN24, SVN26 (Block-IIA 1991,1992) a nový SVN49 (Block-IIRM 2009, není) Doba pro přesun na nové pozice je řádově v měsících SVN24 12 měsíců 1/2011 SVN49 4 měsíce - 5/2010 SVN26 3 měsíce 5/2010 Nejvíce ovlivněny budou RTK a GIS přístroje, nejméně consumergrade
65 Galileo - E MHz - E MHz - E MHz - E MHz podepsány první tři hlavní smlouvy na uvedení systému Galileo do plného provozu První satelit bude dodán v červnu 2012, následovat bude jedna družice vždy každé 3 měsíce
66 Galileo Předpokládá se lepší přesnost než GPS přibližně 1 metr Politický cíl - systém nezávislý na USA a Rusku problémy s možností rušit Galileo nezávisle na GPS původně stejné frekvence, Čína x USA Základní přesnost (OS Open Service) bude zdarma, vyšší placená (CS Commercial Service, PRS Public Regulated Service, SoL Safety of Life Service) MHz, MHz 2 testovací satelity GIOVE-A, GIOVE-B

67 Galileo další dvě družice jedna pojmenována David první zaměření pozemského cíle 10-15m přesnost Do konce roku 2014 začne poskytovat první služby, plně funkční satelitů
68 GLONASS vypuštěna raketa PROTON s prozatím posledními třemi družicemi GLONASS-M Nyní 19 satelitů, 16 plně funkčních Europe Czech Republic: See listing for the Czech Technical University, Faculty of Electrical Engineering, Department of Radio Engineering in the GPS Satellite Information section.
69 Glonass -L MHz SPS: bandwidth ~1.022MHz to 1st sinc nulls, centered at each GLONASS L1 SV frequency. - L MHz PPS (on L1 & L2) bandwidth 10.22MHz centered at each GLONASS L2 SV frequency.
70 SBAS - WAAS/EGNOS MHz
71 Doporučená literatura Rapant, P.: Družicové polohové systémy. VŠB-TU Ostrava, str. ISBN CZEPOS Česká síť referenčních stanic GNSS
72 Odkazy CZEPOS - czepos.cuzk.cz ps-x pdf
73 Magellan MB 500 OEM $5, PCBA MB 500 RTK Base [K] SBAS Tracking [Y] 1PPS(Timing Pulse Output) [L] Event Marker (Photogrammetry) [E] 10-Hz Position/Raw Data Update Rate [T] Advanced Multipath Mitigation [C] il&id=85598&product=169
Global Positioning System
 Global Positioning System Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání Ilustrace družice GPS na oběžné dráze plánovaného bloku IIF (obrázek NASA) Tento článek pojednává o konkrétním
Global Positioning System Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání Ilustrace družice GPS na oběžné dráze plánovaného bloku IIF (obrázek NASA) Tento článek pojednává o konkrétním
Zdroje dat GIS. Digitální formy tištěných map. Vstup dat do GISu:
 Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II
 Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence
 2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.10 GNSS GNSS Globální navigační satelitní systémy slouží k určení polohy libovolného počtu uživatelů i objektů v reálném čase
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.10 GNSS GNSS Globální navigační satelitní systémy slouží k určení polohy libovolného počtu uživatelů i objektů v reálném čase
Global Positioning System
 Písemná příprava na zaměstnání Navigace Global Positioning System Popis systému Charakteristika systému GPS GPS (Global Positioning System) je PNT (Positioning Navigation and Timing) systém vyvinutý primárně
Písemná příprava na zaměstnání Navigace Global Positioning System Popis systému Charakteristika systému GPS GPS (Global Positioning System) je PNT (Positioning Navigation and Timing) systém vyvinutý primárně
EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy
 Prezentace do předmětu Geografické informační systémy") EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy EGNOS - je aplikace systému SBAS (Satellite Based Augmentation System) - je vyvíjen: Evropskou
EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy EGNOS - je aplikace systému SBAS (Satellite Based Augmentation System) - je vyvíjen: Evropskou
Globální navigační satelitní systémy 1)
") 1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
Ing. Jiří Fejfar, Ph.D. GNSS. Globální navigační satelitní systémy
 Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
Globální navigační satelitní systémy a jejich využití v praxi
 Globální navigační satelitní systémy a jejich využití v praxi SOUŘADNICOVÉ SYSTÉMY A TEORIE GNSS Ing. Zdeněk Láska (GEODIS BRNO, spol. s r.o.) Tato prezentace je spolufinancována Evropským sociálním fondem
Globální navigační satelitní systémy a jejich využití v praxi SOUŘADNICOVÉ SYSTÉMY A TEORIE GNSS Ing. Zdeněk Láska (GEODIS BRNO, spol. s r.o.) Tato prezentace je spolufinancována Evropským sociálním fondem
Galileo evropský navigační družicový systém
 Galileo evropský navigační družicový systém Internet ve státní správě a samosprávě Hradec Králové, 12. 13. duben 2010 1 Navigační systém Galileo je plánovaný autonomní evropský Globální družicový polohový
Galileo evropský navigační družicový systém Internet ve státní správě a samosprávě Hradec Králové, 12. 13. duben 2010 1 Navigační systém Galileo je plánovaný autonomní evropský Globální družicový polohový
Souřadnicové soustavy a GPS
 Technologie GPS NAVSTAR Souřadnicové soustavy a GPS Prostorové geocentrické v těch pracuje GPS Rovinné kartografické tyto jsou používány k lokalizaci objektů v mapách Důsledek: chceme-li využívat GPS,
Technologie GPS NAVSTAR Souřadnicové soustavy a GPS Prostorové geocentrické v těch pracuje GPS Rovinné kartografické tyto jsou používány k lokalizaci objektů v mapách Důsledek: chceme-li využívat GPS,
Evropský navigační systém. Jan Golasowski GOL091
 Evropský navigační systém Jan Golasowski GOL091 Co je GALILEO Proč GALILEO Poskytované služby Satelity Použitá technologie GALILEO 2 Autonomní evropský Globální družicový polohový systém. Obdoba amerického
Evropský navigační systém Jan Golasowski GOL091 Co je GALILEO Proč GALILEO Poskytované služby Satelity Použitá technologie GALILEO 2 Autonomní evropský Globální družicový polohový systém. Obdoba amerického
Principy GPS mapování
 Principy GPS mapování Irena Smolová GPS GPS = globální družicový navigační systém určení polohy kdekoliv na zemském povrchu, bez ohledu na počasí a na dobu, kdy se provádí měření Vývoj systému GPS původně
Principy GPS mapování Irena Smolová GPS GPS = globální družicový navigační systém určení polohy kdekoliv na zemském povrchu, bez ohledu na počasí a na dobu, kdy se provádí měření Vývoj systému GPS původně
SYSTÉM GALILEO. Jakub Štolfa, sto231 sto231@vsb.cz
 SYSTÉM GALILEO Jakub Štolfa, sto231 sto231@vsb.cz OBSAH 1) Co je to systém Galileo 2) Struktura systému Galileo 3) Služby systému Galileo 4) Přenosový systém systému Galileo 5) Historie systému Galileo
SYSTÉM GALILEO Jakub Štolfa, sto231 sto231@vsb.cz OBSAH 1) Co je to systém Galileo 2) Struktura systému Galileo 3) Služby systému Galileo 4) Přenosový systém systému Galileo 5) Historie systému Galileo
GPS navigace a geocaching jako její praktická aplikace ve volnočasové aktivitě. Zdeněk Drvota (dr.vota) KID, DFJP Univerzita Pardubice
 KID, DFJP Univerzita Pardubice") GPS navigace a geocaching jako její praktická aplikace ve volnočasové aktivitě Zdeněk Drvota (dr.vota) KID, DFJP Univerzita Pardubice Globální družicový polohový systém Global Navigation Satellite Systém
GPS navigace a geocaching jako její praktická aplikace ve volnočasové aktivitě Zdeněk Drvota (dr.vota) KID, DFJP Univerzita Pardubice Globální družicový polohový systém Global Navigation Satellite Systém
Geoinformační technologie
 Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
ZPRACOVÁNÍ KÓDOVÝCH MĚŘENÍ GLOBÁLNÍCH NAVIGAČNÍCH SYSTÉMŮ
 ZPRACOVÁNÍ KÓDOVÝCH MĚŘENÍ GLOBÁLNÍCH NAVIGAČNÍCH SYSTÉMŮ 1 Úvod Tomáš Tichý 1 Tento projekt slouží ke zpracování kódových měření GNSS Kódové měření měří s přesností v řádech metrů a využívají ho především
ZPRACOVÁNÍ KÓDOVÝCH MĚŘENÍ GLOBÁLNÍCH NAVIGAČNÍCH SYSTÉMŮ 1 Úvod Tomáš Tichý 1 Tento projekt slouží ke zpracování kódových měření GNSS Kódové měření měří s přesností v řádech metrů a využívají ho především
GPS přijímač. Jan Chroust
 GPS přijímač Jan Chroust Modul byl postaven na základě IO LEA-6S společnosti u-box, plošný spoj umožňuje osazení i LEA-6T. Tyto verze umožňují příjem GPS signálu a s tím spojené výpočty. Výhodou modulu
GPS přijímač Jan Chroust Modul byl postaven na základě IO LEA-6S společnosti u-box, plošný spoj umožňuje osazení i LEA-6T. Tyto verze umožňují příjem GPS signálu a s tím spojené výpočty. Výhodou modulu
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
Seznámení s moderní přístrojovou technikou Globální navigační satelitní systémy
 Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Moderní technologie v geodézii
 Moderní technologie v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za účelem
Moderní technologie v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za účelem
13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 28.4.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 28.4.2016 Jiří Šebesta Ústav radioelektroniky
Využití GPS pro optimalizaci pohonu elektromobilů
 ÚJV Řež, a. s. Využití GPS pro optimalizaci pohonu elektromobilů Michal Morte 19.03.2013, Brno Perspektivy elektromobility II Obsah GPS (Global Positioning System) Historie Princip Čeho lze s GPS dosáhnout
ÚJV Řež, a. s. Využití GPS pro optimalizaci pohonu elektromobilů Michal Morte 19.03.2013, Brno Perspektivy elektromobility II Obsah GPS (Global Positioning System) Historie Princip Čeho lze s GPS dosáhnout
Střední průmyslová škola zeměměřická GNSS. Jana Mansfeldová
 Střední průmyslová škola zeměměřická GNSS Jana Mansfeldová GNSS globální navigační satelitní systémy GPS NAVSTAR americký GLONASS ruský GALILEO ESA(EU) další čínský,... Co je to GPS Global Positioning
Střední průmyslová škola zeměměřická GNSS Jana Mansfeldová GNSS globální navigační satelitní systémy GPS NAVSTAR americký GLONASS ruský GALILEO ESA(EU) další čínský,... Co je to GPS Global Positioning
9 MODERNÍ PŘÍSTROJE A TECHNOLOGIE V GEODEZII
 9 MODERNÍ PŘÍSTROJE A TECHNOLOGIE V GEODEZII 9.1 Totální stanice Geodetické totální stanice jsou přístroje, které slouží k měření a vytyčování vodorovných a svislých úhlů, délek a k registraci naměřených
9 MODERNÍ PŘÍSTROJE A TECHNOLOGIE V GEODEZII 9.1 Totální stanice Geodetické totální stanice jsou přístroje, které slouží k měření a vytyčování vodorovných a svislých úhlů, délek a k registraci naměřených
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY
 GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
GLONASS. Obsah. [editovat] Vývoj. Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání
![GLONASS. Obsah. [editovat] Vývoj. Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání](/thumbs/56/38918676.jpg "GLONASS. Obsah. [editovat] Vývoj. Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání") GLONASS Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání Model družice systému GLONASS, vystavený na CEBIT 2011 GLONASS (ГЛОбальная НАвигационная Спутниковая Система, tr.: Globalnaja navigacionnaja
GLONASS Z Wikipedie, otevřené encyklopedie Skočit na: Navigace, Hledání Model družice systému GLONASS, vystavený na CEBIT 2011 GLONASS (ГЛОбальная НАвигационная Спутниковая Система, tr.: Globalnaja navigacionnaja
Geodézie Přednáška. Globální navigační satelitní systémy (GNSS)
") Geodézie Přednáška Globální navigační satelitní systémy (GNSS) strana 2 Historie a vývoj družicových systémů období vlastních družicových systémů není dlouhé, předcházela mu však dlouhá a bohatá historie
Geodézie Přednáška Globální navigační satelitní systémy (GNSS) strana 2 Historie a vývoj družicových systémů období vlastních družicových systémů není dlouhé, předcházela mu však dlouhá a bohatá historie
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Bakalářská práce EVALUAČNÍ APLIKACE TELEMATICKÝCH PERFORMAČNÍCH INDIKÁTORŮ V OBLASTI GNSS Konrád Tvrdý Praha 2012 Čestné prohlášení Já, Konrád Tvrdý,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Bakalářská práce EVALUAČNÍ APLIKACE TELEMATICKÝCH PERFORMAČNÍCH INDIKÁTORŮ V OBLASTI GNSS Konrád Tvrdý Praha 2012 Čestné prohlášení Já, Konrád Tvrdý,
Globální navigační satelitní systémy (GNSS)
") 1. Úvod Globální navigační satelitní systémy (GNSS) prof. Ing. Martin Štroner, Ph.D. ČVUT Fakulta stavební, Praha Globální navigační systémy jsou v povědomí veřejnosti spojeny zejména s automobilovou navigací,
1. Úvod Globální navigační satelitní systémy (GNSS) prof. Ing. Martin Štroner, Ph.D. ČVUT Fakulta stavební, Praha Globální navigační systémy jsou v povědomí veřejnosti spojeny zejména s automobilovou navigací,
14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
Globální polohové a navigační systémy
 Globální polohové a navigační systémy KGI/APGPS RNDr. Vilém Pechanec, Ph.D. Univerzita Palackého v Olomouci Univerzita Palackého v Olomouci I NVESTICE DO ROZVOJE V ZDĚLÁVÁNÍ Environmentální vzdělávání
Globální polohové a navigační systémy KGI/APGPS RNDr. Vilém Pechanec, Ph.D. Univerzita Palackého v Olomouci Univerzita Palackého v Olomouci I NVESTICE DO ROZVOJE V ZDĚLÁVÁNÍ Environmentální vzdělávání
Globální navigační satelitní systémy (GNSS)
") Geodézie přednáška 6 Globální navigační satelitní systémy (GNSS) Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 OBSAH: Historie a vývoj družicových systémů
Geodézie přednáška 6 Globální navigační satelitní systémy (GNSS) Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 OBSAH: Historie a vývoj družicových systémů
GPS - Global Positioning System
 Vysoká škola báňská - Technická univerzita Ostrava 20. února 2011 GPS Družicový pasivní dálkoměrný systém. Tvoří sít družic, kroužících na přesně specifikovaných oběžných drahách. Pasivní znamená pouze
Vysoká škola báňská - Technická univerzita Ostrava 20. února 2011 GPS Družicový pasivní dálkoměrný systém. Tvoří sít družic, kroužících na přesně specifikovaných oběžných drahách. Pasivní znamená pouze
MRAR-L. Družicové navigační systémy. Č. úlohy 4 ZADÁNÍ ROZBOR
 MRAR-L ZADÁNÍ Č. úlohy 4 Družicové navigační systémy 4.1 Seznamte se s ovládáním GPS přijímače ORCAM 20 a vizualizačním programem pro Windows SiRFDemo. 4.2 Seznamte se s protokolem pro předávání zpráv
MRAR-L ZADÁNÍ Č. úlohy 4 Družicové navigační systémy 4.1 Seznamte se s ovládáním GPS přijímače ORCAM 20 a vizualizačním programem pro Windows SiRFDemo. 4.2 Seznamte se s protokolem pro předávání zpráv
Registrační číslo projektu: CZ.1.07/1.5.00/ Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost
 Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
SLOVNÍČEK POJMŮ SATELITNÍ NAVIGACE
 Strana 1 (celkem 6) SATELITNÍ NAVIGACE - SLOVNÍČEK POJMŮ SLOVNÍČEK POJMŮ SATELITNÍ NAVIGACE Accuracy Přesnost, definicí přesnosti u systému GPS je celá řada, neboť díky technologii a konfiguraci systému
Strana 1 (celkem 6) SATELITNÍ NAVIGACE - SLOVNÍČEK POJMŮ SLOVNÍČEK POJMŮ SATELITNÍ NAVIGACE Accuracy Přesnost, definicí přesnosti u systému GPS je celá řada, neboť díky technologii a konfiguraci systému
Leica e-mail 4/2006 GLONASS. Proč nyní? Vážení přátelé!
 GLONASS Vážení přátelé! 4. dubna 2006 uvedla Leica Geosystems opět významnou inovaci do GPS1200 podporu ruského navigačního systému GLONASS. Nově vzniklé přijímače s přívlastkem GG, tj. univerzální senzor
GLONASS Vážení přátelé! 4. dubna 2006 uvedla Leica Geosystems opět významnou inovaci do GPS1200 podporu ruského navigačního systému GLONASS. Nově vzniklé přijímače s přívlastkem GG, tj. univerzální senzor
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost
 Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
Využití určování polohy pro řešení krizových situací
 Využití určování polohy pro řešení krizových situací Positioning in emergency solutions Bc. František Rochovanský Diplomová práce 2011 UTB ve Zlíně, Fakulta aplikované informatiky, 2011 4 ABSTRAKT Tato
Využití určování polohy pro řešení krizových situací Positioning in emergency solutions Bc. František Rochovanský Diplomová práce 2011 UTB ve Zlíně, Fakulta aplikované informatiky, 2011 4 ABSTRAKT Tato
 FOND VYSOČINY Alžběta BRYCHTOVÁ& Jan GELETIČ Katedra geoinformatiky Univerzita Palackého v Olomouci Co násn dnes čeká? Teoretická část Historie navigace Způsoby navigace Systém GPS, Glonnas, Galileo GPS
FOND VYSOČINY Alžběta BRYCHTOVÁ& Jan GELETIČ Katedra geoinformatiky Univerzita Palackého v Olomouci Co násn dnes čeká? Teoretická část Historie navigace Způsoby navigace Systém GPS, Glonnas, Galileo GPS
Globální navigační satelitní systémy a jejich využití v praxi
 Globální navigační satelitní systémy a jejich využití v praxi Metoda RTK a její využití Martin Tešnar (GEODIS BRNO, spol. s r.o.) Tato prezentace je spolufinancována Evropským sociálním fondem a státním
Globální navigační satelitní systémy a jejich využití v praxi Metoda RTK a její využití Martin Tešnar (GEODIS BRNO, spol. s r.o.) Tato prezentace je spolufinancována Evropským sociálním fondem a státním
VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR
 SMĚROVÉ A DRUŽICOVÉ SPOJE Laboratorní úloha č. 1 VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR ZADÁNÍ 1) Seznamte se s modulem přijímače pro příjem a zpracování navigačních signálů systému GPS-Navstar
SMĚROVÉ A DRUŽICOVÉ SPOJE Laboratorní úloha č. 1 VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR ZADÁNÍ 1) Seznamte se s modulem přijímače pro příjem a zpracování navigačních signálů systému GPS-Navstar
UNIVERZITA PARDUBICE FAKULTA EKONOMICKO SPRÁVNÍ BAKALÁŘSKÁ PRÁCE 2008 MARCEL MOCHAN
 UNIVERZITA PARDUBICE FAKULTA EKONOMICKO SPRÁVNÍ BAKALÁŘSKÁ PRÁCE 2008 MARCEL MOCHAN Univerzita Pardubice Fakulta ekonomicko-správní Globální navigační systémy Marcel Mochan Bakalářská práce 2008 SOUHRN
UNIVERZITA PARDUBICE FAKULTA EKONOMICKO SPRÁVNÍ BAKALÁŘSKÁ PRÁCE 2008 MARCEL MOCHAN Univerzita Pardubice Fakulta ekonomicko-správní Globální navigační systémy Marcel Mochan Bakalářská práce 2008 SOUHRN
Globální družicový navigační systém
 Globální družicový navigační systém GALILEO Galileo je globální družicový navigační systém, který vyvíjí Evropa. Postaven je na principu amerického GPS a ruského GLONASS, což jsou vojenské navigační systémy.
Globální družicový navigační systém GALILEO Galileo je globální družicový navigační systém, který vyvíjí Evropa. Postaven je na principu amerického GPS a ruského GLONASS, což jsou vojenské navigační systémy.
Úvod do oblasti zpracování přesných GNSS měření. Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 1.
 Úvod do oblasti zpracování přesných GNSS měření Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 1. Osnova přednášky Globální navigační družicové systémy Důvody pro zpracování
Úvod do oblasti zpracování přesných GNSS měření Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 1. Osnova přednášky Globální navigační družicové systémy Důvody pro zpracování
MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM
 WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
Možnosti využití systémů EGNOS a Galileo v železniční zabezpečovací technice
 Marek Jonáš 1 Možnosti využití systémů EGNOS a Galileo v železniční zabezpečovací technice Klíčová slova: EGNOS, DGPS, GPS, Galileo 1 Úvod V souvislosti s rychlým rozvojem techniky a technologií během
Marek Jonáš 1 Možnosti využití systémů EGNOS a Galileo v železniční zabezpečovací technice Klíčová slova: EGNOS, DGPS, GPS, Galileo 1 Úvod V souvislosti s rychlým rozvojem techniky a technologií během
OBSAH 1 Úvod Fyzikální charakteristiky Zem Referen ní plochy a soustavy... 21
 OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
GPS přijímač a jeho charakteristiky P r e z e n t a c e 1 1 KONSTRUKCE GPS PŘIJÍMAČŮ A JEJICH CHARAKTERISTIKY
 GPS přijímač a jeho charakteristiky P r e z e n t a c e 1 1 GLOBÁLNÍ NAVIGAČNÍ A POLOHOVÉ SYSTÉMY David Vojtek Institut geoinformatiky Vysoká škola báňská Technická univerzita Ostrava Konstrukce GPS přijímačů
GPS přijímač a jeho charakteristiky P r e z e n t a c e 1 1 GLOBÁLNÍ NAVIGAČNÍ A POLOHOVÉ SYSTÉMY David Vojtek Institut geoinformatiky Vysoká škola báňská Technická univerzita Ostrava Konstrukce GPS přijímačů
Relativistické jevy při synchronizaci nové generace atomových hodin. Jan Geršl Český metrologický institut
 Relativistické jevy při synchronizaci nové generace atomových hodin Jan Geršl Český metrologický institut Objasnění některých pojmů Prostoročas Vlastní čas fyzikálního objektu Souřadnicový čas bodů v prostoročase
Relativistické jevy při synchronizaci nové generace atomových hodin Jan Geršl Český metrologický institut Objasnění některých pojmů Prostoročas Vlastní čas fyzikálního objektu Souřadnicový čas bodů v prostoročase
POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ
 RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
2.3 Princip satelitní navigace
 2.3 Princip satelitní navigace V současné době je nejpoužívanějším systémem satelitní navigace GPS (Global Positioning System). Nachází velmi širokého užití: od automobilů, záchranné služby, přes navádění
2.3 Princip satelitní navigace V současné době je nejpoužívanějším systémem satelitní navigace GPS (Global Positioning System). Nachází velmi širokého užití: od automobilů, záchranné služby, přes navádění
Úvod do předmětu geodézie
 1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
Měření satelitů. Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén.
 Měření satelitů Úvod Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén. Naším úkolem bylo popsat používání frekvenčního spektra
Měření satelitů Úvod Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén. Naším úkolem bylo popsat používání frekvenčního spektra
4. Matematická kartografie
 4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
Protokol určení bodů podrobného polohového bodového pole technologií GNSS
 Protokol určení bodů podrobného polohového bodového pole technologií GNSS Lokalita (název): Hosek246 Okres: Rakovník Katastrální území: Velká Buková ZPMZ: Organizace-firma zhotovitele:air Atlas spol. s
Protokol určení bodů podrobného polohového bodového pole technologií GNSS Lokalita (název): Hosek246 Okres: Rakovník Katastrální území: Velká Buková ZPMZ: Organizace-firma zhotovitele:air Atlas spol. s
1) Sestavte v Matlabu funkci pro stanovení výšky geoidu WGS84. 2) Sestavte v Matlabu funkci pro generování C/A kódu GPS družic.
 Sestavte v Matlabu funkci pro stanovení výšky geoidu WGS84. 2) Sestavte v Matlabu funkci pro generování C/A kódu GPS družic.") LRAR-Cp ZADÁNÍ Č. úlohy 1 Funkce pro zpracování signálu GPS 1) Sestavte v Matlabu funkci pro stanovení výšky geoidu WGS84. 2) Sestavte v Matlabu funkci pro generování C/A kódu GPS družic. ROZBOR Cílem
LRAR-Cp ZADÁNÍ Č. úlohy 1 Funkce pro zpracování signálu GPS 1) Sestavte v Matlabu funkci pro stanovení výšky geoidu WGS84. 2) Sestavte v Matlabu funkci pro generování C/A kódu GPS družic. ROZBOR Cílem
Bezpečná distribuce přesného času
 Bezpečná distribuce přesného času Hodiny, časové stupnice, UTC, GNSS, legální čas Alexander Kuna 24. květen 2018 Ústav fotoniky a elektroniky AV ČR, v. v. i. Úvod Co je čas? Čas si vymysleli lidé, aby
Bezpečná distribuce přesného času Hodiny, časové stupnice, UTC, GNSS, legální čas Alexander Kuna 24. květen 2018 Ústav fotoniky a elektroniky AV ČR, v. v. i. Úvod Co je čas? Čas si vymysleli lidé, aby
PLANETA ZEMĚ A JEJÍ POHYBY. Maturitní otázka č. 1
 PLANETA ZEMĚ A JEJÍ POHYBY Maturitní otázka č. 1 TVAR ZEMĚ Geoid = skutečný tvar Země Nelze vyjádřit matematicky Rotační elipsoid rovníkový poloměr = 6 378 km vzdálenost od středu Země k pólu = 6 358 km
PLANETA ZEMĚ A JEJÍ POHYBY Maturitní otázka č. 1 TVAR ZEMĚ Geoid = skutečný tvar Země Nelze vyjádřit matematicky Rotační elipsoid rovníkový poloměr = 6 378 km vzdálenost od středu Země k pólu = 6 358 km
Satelitní navigace v informačních systémech dopravce. Plzeň Seminář ZČU Plzeň 1
 Satelitní navigace v informačních systémech dopravce Plzeň 26. 5. 2011 Seminář ZČU Plzeň 1 Obsah Úvod Informace o poloze důležitá hodnota Současné aplikace využívající GPS Budoucí možné aplikace Satelitní
Satelitní navigace v informačních systémech dopravce Plzeň 26. 5. 2011 Seminář ZČU Plzeň 1 Obsah Úvod Informace o poloze důležitá hodnota Současné aplikace využívající GPS Budoucí možné aplikace Satelitní
GPS. Uživatelský segment. Global Positioning System
 GPS Uživatelský segment Global Positioning System Trocha 3D geometrie nikoho nezabije opakování Souřadnice pravoúhlé a sférické- opakování Souřadnice sférické- opakování Pro výpočet délky vektoru v rovině
GPS Uživatelský segment Global Positioning System Trocha 3D geometrie nikoho nezabije opakování Souřadnice pravoúhlé a sférické- opakování Souřadnice sférické- opakování Pro výpočet délky vektoru v rovině
Komunikace MOS s externími informačními systémy. Lucie Steinocherová
 Komunikace MOS s externími informačními systémy Lucie Steinocherová Vedoucí práce: Ing. Václav Novák, CSc. Školní rok: 2009-10 Abstrakt Hlavním tématem bakalářské práce bude vytvoření aplikace na zpracování
Komunikace MOS s externími informačními systémy Lucie Steinocherová Vedoucí práce: Ing. Václav Novák, CSc. Školní rok: 2009-10 Abstrakt Hlavním tématem bakalářské práce bude vytvoření aplikace na zpracování
Protínání vpřed - úhlů, směrů, délek GNSS metody- statická, rychlá statická, RTK Fotogrammetrické metody analytická aerotriangulace
 Ing. Pavel Hánek, Ph.D. hanek00@zf.jcu.cz Protínání vpřed - úhlů, sěrů, délek GNSS etody- statická, rychlá statická, RTK Fotograetrické etody analytická aerotriangulace +y 3 s 13 1 ω 1 ω σ 1 Používá se
Ing. Pavel Hánek, Ph.D. hanek00@zf.jcu.cz Protínání vpřed - úhlů, sěrů, délek GNSS etody- statická, rychlá statická, RTK Fotograetrické etody analytická aerotriangulace +y 3 s 13 1 ω 1 ω σ 1 Používá se
PŘESNOST SATELITNÍHO NAVIGAČNÍHO SYSTÉMU GPS A JEHO DOSTUPNOST V KRITICKÝCH PODMÍNKÁCH
 PŘESNOST SATELITNÍHO NAVIGAČNÍHO SYSTÉMU GPS A JEHO DOSTUPNOST V KRITICKÝCH PODMÍNKÁCH PRECISENESS OF SATELLITE NAVIGATION SYSTEM GPS AND ITS AVAILABILITY UNDER CRITICAL CONDITIONS Josef Marek, Ladislav
PŘESNOST SATELITNÍHO NAVIGAČNÍHO SYSTÉMU GPS A JEHO DOSTUPNOST V KRITICKÝCH PODMÍNKÁCH PRECISENESS OF SATELLITE NAVIGATION SYSTEM GPS AND ITS AVAILABILITY UNDER CRITICAL CONDITIONS Josef Marek, Ladislav
Evropský program Copernicus: Přechod do provozní fáze
 Evropský program Copernicus: Přechod do provozní fáze Lenka Hladíková CENIA Oddělení mapových služeb Lenka Hladíková CENIA, česká informační agentura životního prostředí Geoinformace ve veřejné správě
Evropský program Copernicus: Přechod do provozní fáze Lenka Hladíková CENIA Oddělení mapových služeb Lenka Hladíková CENIA, česká informační agentura životního prostředí Geoinformace ve veřejné správě
Navigace využívající družicové systémy
 Navigace využívající družicové systémy NAVSTAR GPS USA (Navigation Satellite Timing and Ranging Global Positioning System) GALILEO - EU GLONASS - Rusko Trocha historie Vznik satelitních navigačních systémů
Navigace využívající družicové systémy NAVSTAR GPS USA (Navigation Satellite Timing and Ranging Global Positioning System) GALILEO - EU GLONASS - Rusko Trocha historie Vznik satelitních navigačních systémů
GEODÉZIE VYŠŠÍ ODBORNÁ ŠKOLA STAVEBNÍ STŘEDNÍ ŠKOLA STAVEBNÍ VYSOKÉ MÝTO. Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství GEODÉZIE Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 16. 12. 2016 VYŠŠÍ ODBORNÁ ŠKOLA STAVEBNÍ A
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství GEODÉZIE Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 16. 12. 2016 VYŠŠÍ ODBORNÁ ŠKOLA STAVEBNÍ A
MENDELOVA UNIVERZITA V BRNĚ
 MENDELOVA UNIVERZITA V BRNĚ LESNICKÁ A DŘEVAŘSKÁ FAKULTA ÚSTAV GEOINFORMAČNÍCH TECHNOLOGIÍ Vliv uživatelského nastavení GPS přijímačů na přesnost určení polohy v podmínkách lesních porostů Disertační práce
MENDELOVA UNIVERZITA V BRNĚ LESNICKÁ A DŘEVAŘSKÁ FAKULTA ÚSTAV GEOINFORMAČNÍCH TECHNOLOGIÍ Vliv uživatelského nastavení GPS přijímačů na přesnost určení polohy v podmínkách lesních porostů Disertační práce
Historie navigace a GNSS. Ing. Kateřina TAJOVSKÁ, PhD. Geografický ústav, Přírodovědecká fak. MU Brno
 Historie navigace a GNSS Ing. Kateřina TAJOVSKÁ, PhD. Geografický ústav, Přírodovědecká fak. MU Brno katkatajovska@email.cz Obsah přednášky Stručná historie navigace a určování polohy Současné navigační
Historie navigace a GNSS Ing. Kateřina TAJOVSKÁ, PhD. Geografický ústav, Přírodovědecká fak. MU Brno katkatajovska@email.cz Obsah přednášky Stručná historie navigace a určování polohy Současné navigační
České vysoké učení technické v Praze Fakulta elektrotechnická DIPLOMOVÁ PRÁCE. Využití GPS systému pro měření náklonu letadla
 České vysoké učení technické v Praze Fakulta elektrotechnická DIPLOMOVÁ PRÁCE Využití GPS systému pro měření náklonu letadla Praha, 2010 Autor: Petr Nováček Prohlášení Prohlašuji, že jsem svou diplomovou
České vysoké učení technické v Praze Fakulta elektrotechnická DIPLOMOVÁ PRÁCE Využití GPS systému pro měření náklonu letadla Praha, 2010 Autor: Petr Nováček Prohlášení Prohlašuji, že jsem svou diplomovou
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky DIPLOMOVÁ PRÁCE
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky DIPLOMOVÁ PRÁCE PLZEŇ, 2016 JAN HADÁČEK Prohlášení Předkládám tímto k posouzení a obhajobě diplomovou práci zpracovanou na závěr
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky DIPLOMOVÁ PRÁCE PLZEŇ, 2016 JAN HADÁČEK Prohlášení Předkládám tímto k posouzení a obhajobě diplomovou práci zpracovanou na závěr
GNSS korekce Trimble Nikola Němcová
 GNSS korekce Trimble Nikola Němcová 04.02.2016 Trimble VRS Now Czech GNSS rover Trimble VRS Now Czech Maximální výkon + = Trimble VRS Now Czech Přes 6 let zkušeností 100% pokrytí ČR 29 stanic + 10 zahraničních
GNSS korekce Trimble Nikola Němcová 04.02.2016 Trimble VRS Now Czech GNSS rover Trimble VRS Now Czech Maximální výkon + = Trimble VRS Now Czech Přes 6 let zkušeností 100% pokrytí ČR 29 stanic + 10 zahraničních
Soukromá vyšší odborná škola a Obchodní akademie s.r.o. České Budějovice Pražská 3. Absolventská práce. 2007 Slavíček Jiří 1/56
 Soukromá vyšší odborná škola a Obchodní akademie s.r.o. České Budějovice Pražská 3. Absolventská práce 2007 Slavíček Jiří 1/56 Soukromá vyšší odborná škola a Obchodní akademie s.r.o. České Budějovice Pražská
Soukromá vyšší odborná škola a Obchodní akademie s.r.o. České Budějovice Pražská 3. Absolventská práce 2007 Slavíček Jiří 1/56 Soukromá vyšší odborná škola a Obchodní akademie s.r.o. České Budějovice Pražská
Moderní navigační systém ve službách policie a soukromých bezpečnostních služeb
 Bc. Tomáš Sláma Moderní navigační systém ve službách policie a soukromých bezpečnostních služeb Anotace Studie se zabývá stávajícím využitím moderních navigačních systémů ve službách Policie České republiky
Bc. Tomáš Sláma Moderní navigační systém ve službách policie a soukromých bezpečnostních služeb Anotace Studie se zabývá stávajícím využitím moderních navigačních systémů ve službách Policie České republiky
MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY
 Centrum pro rozvoj výzkumu pokročilých řídicích a senzorických technologií MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY Ing. Tomáš Jílek, Ph.D. (VUT v Brně) Obsah semináře úvod metody měření a jejich
Centrum pro rozvoj výzkumu pokročilých řídicích a senzorických technologií MĚŘENÍ VELIČIN POHYBU V APLIKACÍCH MOBILNÍ ROBOTIKY Ing. Tomáš Jílek, Ph.D. (VUT v Brně) Obsah semináře úvod metody měření a jejich
60305-a. GPS přijímač BT-348. Příručka uživatele
 60305-a GPS přijímač BT-348 Příručka uživatele Příručka uživatele (60305-a) GPS přijímač BT-348 1. Úvod BT-348 je GPS přijímač s Bluetooth rozhraním a s aktivní vestavěnou, vysoce citlivou anténou pro
60305-a GPS přijímač BT-348 Příručka uživatele Příručka uživatele (60305-a) GPS přijímač BT-348 1. Úvod BT-348 je GPS přijímač s Bluetooth rozhraním a s aktivní vestavěnou, vysoce citlivou anténou pro
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Geografické informační systémy
 Geografické informační systémy Slajdy pro předmět GIS Martin Hrubý hrubym @ fit.vutbr.cz Vysoké učení technické v Brně Fakulta informačních technologií, Božetěchova 2, 61266 Brno akademický rok 2006/07
Geografické informační systémy Slajdy pro předmět GIS Martin Hrubý hrubym @ fit.vutbr.cz Vysoké učení technické v Brně Fakulta informačních technologií, Božetěchova 2, 61266 Brno akademický rok 2006/07
Další metody v geodézii
 Další metody v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Fotogrammetrie Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za
Další metody v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Fotogrammetrie Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za
Základní jednotky v astronomii
 v01.00 Základní jednotky v astronomii Ing. Neliba Vlastimil AK Kladno 2005 Délka - l Slouží pro určení vzdáleností ve vesmíru Základní jednotkou je metr metr je definován jako délka, jež urazí světlo ve
v01.00 Základní jednotky v astronomii Ing. Neliba Vlastimil AK Kladno 2005 Délka - l Slouží pro určení vzdáleností ve vesmíru Základní jednotkou je metr metr je definován jako délka, jež urazí světlo ve
Univerzita Pardubice. Fakulta dopravní
 Univerzita Pardubice Fakulta dopravní Satelitní navigace GPS a její využití při vyhledávání vozidel Tomáš Khom Bakalářská práce 2008 SOUHRN Tato bakalářská práce je věnována satelitní navigaci GPS, se
Univerzita Pardubice Fakulta dopravní Satelitní navigace GPS a její využití při vyhledávání vozidel Tomáš Khom Bakalářská práce 2008 SOUHRN Tato bakalářská práce je věnována satelitní navigaci GPS, se
GPSnavigator. mija. Jednoduchý návod na postavení GPS navigátoru z MLAB modulů a GPS modulu LEADTEK LR9552
 mija Jednoduchý návod na postavení GPS navigátoru z modulů a GPS modulu LEADTEK LR9552 1. Seznam použitých modulů... 1 2. Konstrukce u... 2 2.1. Úvodem... 2 2.2. Popis GPS modulu LEADTEK LR9552...2 2.3.
mija Jednoduchý návod na postavení GPS navigátoru z modulů a GPS modulu LEADTEK LR9552 1. Seznam použitých modulů... 1 2. Konstrukce u... 2 2.1. Úvodem... 2 2.2. Popis GPS modulu LEADTEK LR9552...2 2.3.
8a. Geodetické družice Aleš Bezděk
 8a. Geodetické družice Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Družice v minulosti určovali astronomové, plavci, geodeti,... polohu na Zemi pomocí hvězd v dnešní době: pomocí družic specializované
8a. Geodetické družice Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Družice v minulosti určovali astronomové, plavci, geodeti,... polohu na Zemi pomocí hvězd v dnešní době: pomocí družic specializované
ELEKTRONICKÉ ORIENTAČNÍ POMŮCKY PRO NEVIDOMÉ - NAVIGAČNÍ CENTRUM SONS
 ELEKTRONICKÉ ORIENTAČNÍ POMŮCKY PRO NEVIDOMÉ - NAVIGAČNÍ CENTRUM SONS Studijní materiál pro účastníky kurzu Osvětový pracovník a konzultant pro zpřístupňování prostředí osobám se zrakovým postižením pořádaného
ELEKTRONICKÉ ORIENTAČNÍ POMŮCKY PRO NEVIDOMÉ - NAVIGAČNÍ CENTRUM SONS Studijní materiál pro účastníky kurzu Osvětový pracovník a konzultant pro zpřístupňování prostředí osobám se zrakovým postižením pořádaného
Skupina družicové navigace. Katedra radioelektroniky K13137 ČVUT FEL
 Skupina družicové navigace Katedra radioelektroniky K13137 ČVUT FEL Terminologie ie Satellite (Radio) Navigation Systems Družicové radionavigační systémy ~ Radio Determination Satellite Systems Družicové
Skupina družicové navigace Katedra radioelektroniky K13137 ČVUT FEL Terminologie ie Satellite (Radio) Navigation Systems Družicové radionavigační systémy ~ Radio Determination Satellite Systems Družicové
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
Rádiové rozhraní GSM fáze 1
 Mobilní komunikace Semestrální práce Rádiové rozhraní GSM fáze 1 Martin Klinger 22.5.2007 V průběhu 80.let Evropa zaznamenává prudký nárůst analogových celuárních systémů, bohužel každá země provozuje
Mobilní komunikace Semestrální práce Rádiové rozhraní GSM fáze 1 Martin Klinger 22.5.2007 V průběhu 80.let Evropa zaznamenává prudký nárůst analogových celuárních systémů, bohužel každá země provozuje
Permanentní sítě určování polohy
 Permanentní sítě určování polohy (CZEPOS a jeho služby) Netolický Lukáš Historie budování sítě Na našem území poměrně krátká počátky okolo roku 2000 vznik prvních studií od VÚGTK Příprava projektu sítě
Permanentní sítě určování polohy (CZEPOS a jeho služby) Netolický Lukáš Historie budování sítě Na našem území poměrně krátká počátky okolo roku 2000 vznik prvních studií od VÚGTK Příprava projektu sítě
PB169 Operační systémy a sítě
 PB169 Operační systémy a sítě Přenos dat v počítačových sítích Marek Kumpošt, Zdeněk Říha Způsob propojení sítí opak. Drátové sítě TP (twisted pair) kroucená dvoulinka 100Mbit, 1Gbit Koaxiální kabel vyšší
PB169 Operační systémy a sítě Přenos dat v počítačových sítích Marek Kumpošt, Zdeněk Říha Způsob propojení sítí opak. Drátové sítě TP (twisted pair) kroucená dvoulinka 100Mbit, 1Gbit Koaxiální kabel vyšší
ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních technologií Vysoké učení technické v Brně
 1 ANOTACE Teoretické poznatky o různých družicových systémech určení polohy. Zvláštní zaměření je na americký systém GPS. Součástí je popis celého systému a následná analýza zdrojů nepřesností. Návrh metody
1 ANOTACE Teoretické poznatky o různých družicových systémech určení polohy. Zvláštní zaměření je na americký systém GPS. Součástí je popis celého systému a následná analýza zdrojů nepřesností. Návrh metody
PB169 Operační systémy a sítě
 PB169 Operační systémy a sítě Řízení přístupu k médiu, MAC Marek Kumpošt, Zdeněk Říha Řízení přístupu k médiu Více zařízení sdílí jednu komunikační linku Zařízení chtějí nezávisle komunikovat a posílat
PB169 Operační systémy a sítě Řízení přístupu k médiu, MAC Marek Kumpošt, Zdeněk Říha Řízení přístupu k médiu Více zařízení sdílí jednu komunikační linku Zařízení chtějí nezávisle komunikovat a posílat
ZÁZNAM PODROBNÉHO MĚŘENÍ ZMĚN
 Vyhotovitel Za Kostelem 421, Jedovnice IČO: 75803216, tel.: 603325513 Číslo geometrického plánu (zakázky) 506-5/2017 ZÁZNAM PODROBNÉHO MĚŘENÍ ZMĚN Katastrální úřad pro Katastrální pracoviště Obec Katastrální
Vyhotovitel Za Kostelem 421, Jedovnice IČO: 75803216, tel.: 603325513 Číslo geometrického plánu (zakázky) 506-5/2017 ZÁZNAM PODROBNÉHO MĚŘENÍ ZMĚN Katastrální úřad pro Katastrální pracoviště Obec Katastrální
20.2.2014 REKAPITULACE. Princip dálkoměrných měření GNSS
 Princip dálkoměrných měření GNSS P r e z e n t a c e 2 GLOBÁLNÍ NAVIGAČNÍ A POLOHOVÉ SYSTÉMY David Vojtek Institut geoinformatiky Vysoká škola báňská Technická univerzita Ostrava Rekapitulace Kapitán a
Princip dálkoměrných měření GNSS P r e z e n t a c e 2 GLOBÁLNÍ NAVIGAČNÍ A POLOHOVÉ SYSTÉMY David Vojtek Institut geoinformatiky Vysoká škola báňská Technická univerzita Ostrava Rekapitulace Kapitán a
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
6d. Techniky kosmické geodézie (družicová altimetrie) Aleš Bezděk
 Aleš Bezděk") 6d. Techniky kosmické geodézie (družicová altimetrie) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Co je družicová altimetrie? Družicová technika založená na radarovém snímání mořské hladiny:
6d. Techniky kosmické geodézie (družicová altimetrie) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Co je družicová altimetrie? Družicová technika založená na radarovém snímání mořské hladiny:
GIS a pozemkové úpravy. Data pro využití území (DPZ)
") GIS a pozemkové úpravy Data pro využití území (DPZ) Josef Krása Katedra hydromeliorací a krajinného inženýrství, Fakulta stavební ČVUT v Praze 1 Papírová mapa Nevymizela v době GIS systémů (Stále základní
GIS a pozemkové úpravy Data pro využití území (DPZ) Josef Krása Katedra hydromeliorací a krajinného inženýrství, Fakulta stavební ČVUT v Praze 1 Papírová mapa Nevymizela v době GIS systémů (Stále základní
Tabulka D-1 - Přesnost určování polohy uživatele GPS
 DODATEK D PŘEDPIS L 10/I DODATEK D - INFORMACE A VÝKLADOVÉ MATERIÁLY PRO APLIKACI STANDARDŮ A DOPORUČENÝCH POSTUPŮ GNSS 1. Definice Duo-binarita. Duo-binarita je známa jako kódování typu Manchester. Někdy
DODATEK D PŘEDPIS L 10/I DODATEK D - INFORMACE A VÝKLADOVÉ MATERIÁLY PRO APLIKACI STANDARDŮ A DOPORUČENÝCH POSTUPŮ GNSS 1. Definice Duo-binarita. Duo-binarita je známa jako kódování typu Manchester. Někdy
Rozprostřené spektrum. Multiplex a mnohonásobný přístup
 Rozprostřené spektrum Multiplex a mnohonásobný přístup Multiplex Přenos více nezávislých informačních signálů jedním přenosovým prostředím (mezi dvěma body) Multiplexování MPX Vratný proces sdružování
Rozprostřené spektrum Multiplex a mnohonásobný přístup Multiplex Přenos více nezávislých informačních signálů jedním přenosovým prostředím (mezi dvěma body) Multiplexování MPX Vratný proces sdružování
íta ové sít baseband narrowband broadband
 Každý signál (diskrétní i analogový) vyžaduje pro přenos určitou šířku pásma: základní pásmo baseband pro přenos signálu s jednou frekvencí (není transponován do jiné frekvence) typicky LAN úzké pásmo
Každý signál (diskrétní i analogový) vyžaduje pro přenos určitou šířku pásma: základní pásmo baseband pro přenos signálu s jednou frekvencí (není transponován do jiné frekvence) typicky LAN úzké pásmo