Princip činnosti a použití Shackova-Hartmannova senzoru vlnoplochy
|
|
|
- Kamil Šimek
- před 7 lety
- Počet zobrazení:
Transkript
1 PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITY PALACKÉHO KATEDRA OPTIKY Princip činnosti a použití Shackova-Hartmannova senzoru vlnoploch Diplomová práce Vpracoval: Studiní obor: Vedoucí práce: Bc. Štěpán Hrázdila Optika a optoelektronika Prof. RNDr. Zdeněk Bouchal, Dr.
2 Prohlašui, že sem diplomovou práci vpracoval samostatně pod vedením Prof. RNDr. Zdeňka Bouchala, Dr. za použití uvedené literatur. V Olomouci dne 7. ledna
3 Obsah Úvod.... Hartmannův senzor....2 Historie Shackova-Hartmannova senzoru Popis Shackova-Hartmannova senzoru Konstrukce Shackova-Hartmannova senzoru Teoretický popis Shackova-Hartmannova senzoru Postup při měření Shackovým-Hartmannovým senzorem Srovnání optických os svazku a senzoru Vrovnání na střed subapertur Kalibrace Odečet pozadí Výpočet energetických středů stop Rekonstrukce vlnoploch Záznam vlnoploch Analýza chb měření a zpracování dat Chb z neistot geometrických parametrů senzoru Chb při referenčním měření Chb v důsledku vzáemného pootočení pole mikročoček a detektoru Chb v důsledku principiálních omezení senzoru Chb v určení správné pozice energetických středů stop Chb numerické metod pro rekonstrukci vlnoploch Eperiment se senzorem Parametr senzoru Program HASO Funkce pro import dat z programu HASO do prostředí MATLAB Měření sférické aberace čočk Měření vlivu epandéru Použití Shackova-Hartmannova senzoru Adaptivní optika Kontrola optických vad Oční optika... 44
4 4.4 Plenoptický fotoaparát Závěr Seznam literatur... 46
5 Úvod Při průchodu světla optickým prostředím může docházet k deformaci světelného pole například vlivem nekvalitních materiálů nebo v důsledku optických aberací. Navíc už en při pouhém šíření světla ve vzduchu může být světelné pole deformováno vlivem atmosférických turbulencí. Eistue však několik způsobů, ak zistit tvar vlnoploch světelného pole a případně tto deformace odstranit. V této práci sou popsán dva senzor, které umožňuí zistit tvar dopadaící vlnoploch, první z nich e Hartmannův senzor, hlavní část e však věnována Shackovu-Hartmannovu senzoru.. Hartmannův senzor Johannes Franz Hartmann ( ) bl ve své době významným astrofzikem. Kdž však chtěl pozorovat oblohu edním z teleskopů, bl zklamán, neboť zistil, že onen teleskop e pro pozorování nevhodný. Jak posléze zistil, příčinou bla špatná kvalita zrcadel v teleskopu. Ab mohl zistit, aké maí zrcadla optické vad, vmslel v roce 900 tzv. Hartmannův test. V podstatě před zrcadlo umístil stínítko (masku) s malými otvor a osvítil e bodovým zdroem (obr. ). Po odrazu od zrcadla e pak možné na detektoru pozorovat svítící bod, které odpovídaí ednotlivým dírkám. Obr. : Měření kvalit zrcadla Hartmannovou metodou a příklad Hartmannov mask
6 Pokud si představíme sponici mezi polohou bodu na detektoru a polohou odpovídaící dírk ve stínítku, zistíme, že tato sponice vlastně znázorňue trasu odraženého paprsku. Dík tomu e pak možné určit aberace zrcadla. Pro kontrolu kvalit zrcadel se Hartmannova metoda používá dodnes. Jen místo fotografické desk se dnes ako detektor používá nečastěi CCD nebo CMOS senzor. Hartmannov mask se v současné době vráběí s velmi vsokou přesností v mnoha různých podobách a rozměrech. Volba mask pro senzor vlnoploch závisí na požadovaných parametrech (citlivosti, přesnosti měření a dnamickém rozsahu), které e možné rovněž ovlivňovat změnou vzáemné vzdálenosti mask a detektoru..2 Historie Shackova-Hartmannova senzoru Na konci šedesátých let 20. století se letectvo Spoených států Amerických obrátilo na Optical Sciences Center na univerzitě v Arizoně s žádostí, zda e možné zlepšit obrazovou kvalitu snímků umělých družic pořízených ze země []. Snadno si lze domslet, že v době studené válk mezi USA a tehdeším Sovětským svazem, měli Američané velký záem zistit, ak velké pokrok ve vývoi satelitů eho rival učinil. Samozřemě pro ně blo žádoucí, ab snímk bl co nevíce detailní a ostré. Rozlišení snímků blo samozřemě limitováno použitou konstrukcí dalekohledu, ale blo navíc degradováno samotným průchodem světla atmosférou. Vzduch totiž nemůžeme považovat za homogenní prostředí, eho inde lomu e závislý zeména na aktuálním tlaku a teplotě. S rostoucím tlakem se u vzduchu inde lomu zvšue, s všší teplotou se naopak snižue. Další, i kdž méně významný vliv hrae také relativní vlhkost vzduchu. V různých vrstvách atmosfér bývaí tto vlastnosti velmi rozdílné a navíc se neustále mění. Jeich proměnlivost e sice možné částečně eliminovat použitím kratších epozičních časů, pokud tomu nebrání další okolnosti. Ale i přesto potom kvůli nestenému indeu lomu v ednotlivých částech atmosfér dochází k zakřivení vlnoploch, podobně ako tomu e u gradientních prostředí. Proto, ab blo možné získat kvalitněší snímk, blo zapotřebí tuto deformaci vlnoploch alespoň částečně kompenzovat. Dr. Aden Mienel přišel s mšlenkou měření optické funkce přenosu (OFP) atmosfér ve steném okamžiku, kd e pořizován i snímek a na základě těchto dat poté vdělit OFP zachceného snímku OFP atmosfér []. Zpočátku blo toto měření prováděno pomocí standardního Hartmannova testu, ale neosvědčilo se, zeména kvůli malé intenzitě světla a nepřesnému vhodnocování energetických středů stop. Dr. Roland Shack se rovněž zapoil do tohoto proektu a navrhl nahradit dír ve stínítku mikročočkami, čímž vlastně vnalezl přístro, který na eho počest nazýváme Shackovým-Hartmannovým senzorem. Problém však 2
7 nastal v tom, že blo potřeba vrobit pole mikročoček, přičemž každá mikročočka měla mít průměr asi mm a ohniskovou vzdálenost 00 až 50 mm. Avšak v té době nebl nikdo schopen takové pole mikročoček vrobit. Po několika neúspěšných pokusech se to nakonec podařilo až Dr. Benu Plattovi. Kompletní Shackův-Hartmannův senzor bl úspěšně otestován v roce 97. 3
8 2 Popis Shackova-Hartmannova senzoru 2. Konstrukce Shackova-Hartmannova senzoru Základem senzoru e pole mikročoček a plošný detektor záření (obvkle CCD nebo CMOS). Světlo, které prošlo mikročočkami, e fokusováno a zachceno detektorem záření, který se obvkle nachází v ohniskové rovině mikročoček (obr. 2). V zachceném obraze e vidět množství světelných stop (svítících bodů), neboť každá mikročočka vtváří své vlastní ohnisko. Obr. 2: Schéma Shackova-Hartmannova senzoru Jak bude ukázáno dále, poloha stop na detektoru souvisí s průměrným gradientem části vlnoploch, dopadaící na subaperturu mikročočk a ohniskovou vzdáleností této mikročočk. Pokud b však dopadaící vlnoplocha bla výrazněi deformována, mohlo b doít k překrvu ednotlivých stop, což b však znamenalo, že tvar vlnoploch vpočítaný z naměřených dat b mohl být chbný. Ab nedošlo k překrvu, e zapotřebí, ab pro každou mikročočku bla definována určitá oblast na detektoru, kam může dopadnout světelná stopa 4

9 Obr. 3: Ilustrační znázornění maticových polí se čtvercovým, kruhovým a heagonálním tvarem mikročoček 5
10 vtvořená touto mikročočkou. Plocha detektoru e tak pomslně rozdělena na ednotlivé části, eichž velikost a počet odpovídá rozmístění a počtu mikročoček v maticovém poli. Potom e možné ednoznačně přiřadit ednotlivé stop odpovídaícím mikročočkám. Pokud na Shackův-Hartmannův senzor dopadá rovinná vlna, budou střed detekovaných stop tvořit pravidelnou síť bodů. V případě, že na senzor dopadá deformovaná vlnoplocha, ednotlivé střed stop budou posunut (obr. 2). V současné době eistue množství Shackových-Hartmannových senzorů, které se liší svými konstrukčními parametr. Pole mikročoček se vráběí mnoha podobách a rozměrech a s různými ohniskovými vzdálenostmi. Na obr. 3 sou příklad polí se čtvercovým, kruhovým a heagonálním tvarem mikročoček. Pro Shackov-Hartmannov senzor se obvkle používaí pole obsahuící 2020 až mikročoček [2]. Jsou vráběna většinou z běžného optického nebo křemenného skla nebo z plastických hmot (PMMA). Tvar povrchu mikročoček bývá nečastěi sférický, ale e možné vrobit i mikročočk asférického tvaru. Současně e velice důležitá přesnost dodržení parametrů u ednotlivých mikročoček. V současné době se odchlk ohniskových vzdáleností mikročoček pohbuí do -3 %. Pro detekci intenzit se používaí plošné detektor záření, nečastěi CCD senzor s vsokým rozlišením a relativně malou velikostí pielů. Podle požadovaných parametrů Shackova- Hartmannova senzoru, t. citlivosti, dnamického rozsahu a přesnosti měření se pak volí vhodná kombinace pole mikročoček a detektoru záření. Záleží zeména na velikosti, tvaru, počtu a ohniskové vzdálenosti mikročoček a na citlivosti, rozměrech a celkovém počtu pielů detektoru. 2.2 Teoretický popis Shackova-Hartmannova senzoru Princip Shackova-Hartmannova senzoru e možné popsat matematickým modelem, který umožňue detailněi pochopit eho fungování a ukáže, ak z naměřených dat zistit tvar dopadaící vlnoploch [2]. Budeme přitom uvažovat běžné použití senzoru, dík kterému můžeme zavést některé zednodušuící předpoklad. Je však nutné si uvědomit, že při měření nestandardních svazků nemusí následuící vzorce platit. Prvním takovým předpokladem e, že světlo dopadaící na -tou mikročočku se šíří ve směru os z a můžeme e popsat paraiální aproimací skalárního vlnového pole. Toto pole e definováno komplení amplitudou U ( r ) A( r ) ep[ ikw ( r )] = A( r ) [ iϕ( r )] 0 = ep, (2.) 6
11 přičemž ( ) r = e polohový vektor v rovině π s počátkem ve středu -té mikročočk., Rovina π označue rovinu pole mikročoček (viz obr. 4). Dále e potřeba doplnit, že ( r ) funkce reálné amplitud pole, k e vlnové číslo, W ( r ) e funkce tvaru vlnoploch a ( r ) fáze vlnového pole. A e ϕ e Obr. 4: Schéma šíření svazku po průchodu mikročočkou Mikročočku budeme považovat za tenkou čočku, eíž propustnost e dána vztahem k 2 ( r ) = ep i r T, (2.2) 2 f kde f e ohnisková vzdálenost mikročočk. Nní e potřeba zistit amplitudu a intenzitu pole v rovině detektoru π 2, která e rovnoběžná s rovinou π. Těsně za mikročočkou e komplení amplituda dána prostým součinem U 0 ( r ) T ( r ). Následně vužieme Fresnelovu aproimaci šíření vlnového pole a dostaneme následuící vzorec, který udává eho komplení amplitudu v rovině detektoru π 2 i ep ( ) ( ik z) ik r2 = U 0 ( r ) T ( r ) ep ( r2 r ) 2 2 U r λ z 2 z L přičemž integrace probíhá přes plochu dané mikročočk, ( ) v rovině π 2, d 2 2, 2, (2.3) r = e polohový vektor z e vzdálenost mezi mikročočkou a detektorem, nebo také vzdálenost mezi rovinami π 2 a π. Z předcházeící rovnice vpočítáme intenzitu v rovině detektoru π 2 * ( r ) = U ( r2 ) U ( r2 ) 2 = ep 2 ik ( r r ) ( r r, ) 2 2 H r2 d r d r I ( λ z) z LL, (2.4) 7
12 funkce H ( r,r ) e přitom rovna ik 2 2 ( r ) = ( ) ( ) { [ ( ) ( )]}, r A r A r ep ik W r W r ep r r H. (2.5) 2 z f Nní e potřeba určit polohu energetického středu stop, neboli intenzitního těžiště, kterou získáme z rovnice r C 2 a po integraci dostáváme vztah I ( r2 ) ( r2 ) d 2 r2 d r2 = 2 I r2 ( r2 ) 2 r2 I d r2 = (2.6) I 0 ( r ) W ( r ) z 2 rc 2 = rc + z I d r, (2.7) f I 0 který popisue šíření poloh energetického centra rozdělení intenzit vlnového pole ( ) r C 2 = C 2, C 2 po průchodu mikročočkou v rovině 2 ( ) C C, C π. Ještě e potřeba vsvětlit, že r = analogick označue polohu energetického centra rozdělení intenzit dopadaícího vlnového pole v rovině pole mikročoček π, I ( r ) e intenzita pole dopadaícího na -tou mikročočku a W ( r ) e gradient dopadaící vlnoploch. V naprosté většině případů e detektor umístěn do rovin obrazového ohniska pole mikročoček π f, a ted z = f. Tím se předchozí vzorec zednoduší na tvar ( r ) W ( r ) rcf f I d r. (2.8) 2 = I 0 Z uvedeného vztahu vplývá, že poloha těžiště rozdělení intenzit odpovídá váženému průměru hodnot gradientu po ploše apertur mikročočk. Dále budeme uvažovat, že intenzita osvětlení subapertur -té mikročočk e praktick konstantní ( I ( r ) = konst.), z čehož plne ( ) 2 r Cf = f W r d r, (2.9) S kde S označue velikost ploch subapertur mikročočk. Jak bude ukázáno dále, vzhledem k omezenému dnamickému rozsahu Shackových-Hartmannových senzorů budeme předpokládat, že část vlnoploch dopadaící na ednotlivé mikročočk odpovídá přibližně rovinné vlně a místo integrace budeme uvažovat pouze průměrný gradient vlnoploch na dané subapertuře. Takto dostaneme vztah 8
13 r Cf = f W (r), (2.0) z něhož plne, že poloha energetického středu stop e přímo úměrná průměrnému gradientu vlnoploch na subapertuře. V případě, kd na pole mikročoček dopadá rovinná vlnoplocha ( W ( r) = 0 ), dostaneme také r = 0, ted poloha energetického středu stop e ve středu Cf subapertur, což souhlasí s očekáváním. V případě Shackova-Hartmannova senzoru se však řeší opačná úloha, ak z naměřených poloh energetických středů určit průměrné hodnot gradientu vlnoploch na ednotlivých subaperturách. Výsledné vzorce však můžeme ednoduše odvodit, ted W (, ) = f W (, ) = f přičemž na -té subapertuře platí r ( ) Cf,, (2.) =, a, ) zde označuí odchlk ( energetických středů stop. Následně už e možné provést numerickou rekonstrukci vzhledem k referenční (rovinné) vlnoploše a určit konkrétní tvar měřené vlnoploch v rovině dopadu na pole mikročoček π. Je potřeba podotknout, že při běžném měření nepříliš deformované vlnoploch bývaí všechn předchozí zednodušuící předpoklad obvkle splněn a nepřestavuí proto něaká významná omezení. Pokud e některý z nich splněn en částečně, e nutné zvážit, estli pak budou výsledk odpovídat skutečnosti. 2.3 Postup při měření Shackovým-Hartmannovým senzorem Norma ISO :2005 [4] definue ednotlivé krok, které e potřeba vkonat před započetím měření a také určue, ak provést numerickou rekonstrukci vlnoploch z naměřených dat. Dále budou uveden odkaz na metod, které tuto normu nesplňuí, ale zase umožňuí získat reálné výsledk i v situacích, kd standardní normou definované postup selhávaí. Norma ted stanovue následuící postup:. Srovnání optických os svazku a senzoru, 2. Vrovnání na střed subapertur, 3. Kalibrace referenční vlnoplochou, 4. Odečet pozadí, 9
14 5. Výpočet energetických středů stop, 6. Rekonstrukce vlnoploch zonální nebo modální metodou, 7. Záznam vlnoploch. Každý z uvedených bodů nní rozebereme podrobněi Srovnání optických os svazku a senzoru Už z nadpisu e zřemé, že optická osa dopadaícího svazku b měla být totožná s optickou osou Shackova-Hartmannova senzoru. To má velký vliv zeména při modální rekonstrukci, protože inak b koeficient ednotlivých polnomů mohl vít u nezarovnaného svazku velmi odlišně od případu, kd budou optické os srovnán Vrovnání na střed subapertur Je zapotřebí vhodnotit obrazový výstup detektoru, to znamená zkontrolovat, zdali e v každé subapertuře nevýše edna světelná stopa (ohnisko tvořené příslušnou mikročočkou, bude se evit ako světlý bod). Pokud se používá rovinná vlnoplocha ako referenční, e výhodné, ab energetické střed stop ležel co neblíže středům ednotlivých subapertur. To zaistí maimální dnamický rozsah při měření deformované vlnoploch. Zároveň e potřeba kontrolovat, ab se nerozel optické os srovnané v předchozím kroku, naopak b mělo doít k eště přesněšímu sladění os Kalibrace Zaznamená se referenční vlnoplocha, která může být buď rovinná nebo sférická. Na iném místě norm se však píše, že ako referenční zdro e preferován kolimovaný laserový svazek, což pochopitelně implikue rovinnou vlnoplochu. Kvůli vloučení aberací mikročoček e důležité, ab tato kalibrace bla prováděna na stené vlnové délce, na které pak bude prováděno měření neznámé vlnoploch Odečet pozadí Před vlastním měřením e doporučeno zaznamenat také intenzitu pozadí, to znamená v situaci, kd na detektor dopadá pouze rozptýlené okolní světlo. Po záznamu testované 0
15 vlnoploch se od intenzit každého pielu odečte intenzita příslušného pielu pozadí. Takto lze úspěšně eliminovat šum, podmínkou však e, že epoziční čas museí být při obou měřeních stené. Norma připouští také možnost, že se měření pozadí vnechá a místo toho se pak provede prahování. Tento případ bude podrobněi rozebírán dále Výpočet energetických středů stop Abchom mohli určit tvar vlnoploch, e potřeba zaznamenaná data dále zpracovat. Neprve e nutné z obrazových dat vhodnotit poloh energetických středů stop. V důsledku difrakce světla, aberací mikročoček a šumu však obvkle mívaí zaznamenaná prostorová rozložení intenzit ednotlivých stop relativně komplikovaný profil, a to i v případě, kd sme provedli odečet pozadí. Onen profil navíc eště závisí na tvaru vlnoploch dopadaícího záření a eho vlnové délce, dále na tvaru a rozměrech mikročoček a eich ohniskové vzdálenosti. Také e nutno vzít v úvahu, že ohnisková vzdálenost a aberace mikročoček se mohou měnit v závislosti na vlnové délce. Pro korektní určení tvaru dopadaící vlnoploch e však zapotřebí určit poloh energetických středů stop s co nevětší přesností. Pro výpočet energetických středů stop lze vužít různých matematických metod, nečastěi se však provádí diskrétní výpočet těžiště profilu intenzit stop. Souřadnice těžiště se vpočítaí ze vztahů ( i, ) I( i, ) T ( i, ) I( i, ) T ( i ) C =, ( i, ) I( i, ) T ( i, ) I( i, ) T ( i ) C =,, (2.2), kde I ( i, ) e hodnota intenzit v obrazovém bodě ( i, ) se souřadnicemi ( i, ), ( i ) ( i ), a T, e funkce udávaící prahování rozdělení intenzit. Ab blo vhodnocení energetických středů stop dostatečně přesné, e zapotřebí, ab stopa na detektoru pokrývala oblast o průměru alespoň pět pielů. Jak blo zmíněno, hodnot intenzit mohou být prahován kvůli potlačení šumu. Obvkle se používá ednostranné prahování, které e definováno vzorcem ( i, ) ( i, ) I P, T ( i, ) = (2.3) 0 I < P, kde P e hodnota prahu, která se nečastěi vpočítá adaptivně z detekovaných hodnot prostorového rozdělení intenzit a úrovně šumu v obrazu.
16 Vpočtené poloh energetických středů stop e však eště potřeba korigovat podle referenční vlnoploch, což se provede pouhým odečtením od poloh referenčního středu = C C R R. (2.4) V určitých případech se může stát, že nebude možné ednoznačně přiřadit ednotlivé zaznamenané stop odpovídaícím mikročočkám a některé stop budou zasahovat do iných subapertur. To nastane tehd, kdž gradient vlnoploch přesáhne istou mezní hodnotu, která závisí na velikosti subapertur, ohniskové vzdálenosti mikročoček a vlnové délce záření. Bereme-li mikročočku ako fzikálně dokonalou optickou soustavu, můžeme pro kruhový tvar mikročoček vužít vzorce, který udává příčný rozměr centrální části stop d A = 2,44λf / D (2.5) a pro čtvercový tvar mikročoček d A = 2λf / D, (2.6) kde λ e vlnová délka záření, f e ohnisková vzdálenost mikročoček a D určue rozměr mikročoček (průměr, respektive stranu čtverce). Předpokládáme-li, že rozteč mikročoček e také rovna D, pak podle [2] e maimální přípustná hodnota gradientu vlnoploch dána vztahem W W D d A = =, (2.7) ma 2 f ma což e mezní případ, kd se eště celá centrální část stop nachází v příslušné subapertuře. Osobně si však mslím, že tento přístup e poněkud konzervativní a zbtečně omezue dnamický rozsah Shackova-Hartmannova senzoru. Navrhoval bch, že v případě, kd bude energetický střed stop ležet kdekoliv v odpovídaící subapertuře kromě eích obvodových pielů, ab bl gradient vlnoploch považován za správný (obr. 5). Stopa ovšem může částečně zasahovat i do sousední subapertur. Pokud však není dopadaící vlnoplocha výrazným způsobem deformována, není pravděpodobná situace, při níž b se dvě stop zobrazil do ednoho místa na detektoru. 2

17 Obr. 5: Posouzení korektního rozsahu gradientu vlnoploch na subapertuře. Žlutý kruh představue maimální možnou výchlku stop při použití konzervativní metod, celá stopa musí ležet v příslušné subapertuře. Oranžový kruh znázorňue situaci, kd stopa sice částečně zasahue do sousedních subapertur, ale eí energetický střed leží v bílé oblasti a podle navrhované metod b bl i v tomto případě gradient vlnoploch stále považován za platný. Energetický střed stop červeného kruhu iž leží v okraové oblasti subapertur (označené šedě) a tudíž b bl gradient považován za neplatný i při použití navrhované metod. Ukážeme si nní na konkrétním případě, ak se zvětší dnamický rozsah senzoru při použití této metod. Uvažueme senzor se čtvercovým polem mikročoček a parametr - strana mikročočk = rozteč mikročoček = rozměr subapertur D = 4 µm - počet pielů v každé subapertuře N N = 6 6 pi. Konzervativní metoda Navrhovaná m. λ = 633 nm λ = 550 nm λ = 450 nm - f = 3 mm 3,45 4,8 5,05 6,63 f = 4 mm 8,70 9,43 0,30 2,47 f = 5 mm 5,85 6,58 7,45 9,98 Tabulka : Hodnot maimálního gradientu vlnoploch [mrad] 3
18 Je vidět, že u navrhované metod není hodnota maimálního gradientu závislá na vlnové délce, neboť zde závisí na vpočtených polohách energetických středů stop a v některých případech b umožnila zvýšení dnamického rozsahu senzoru i o desítk procent. Pokud b však i při použití této metod docházelo k situaci, kd b neblo možné ednoznačně přiřadit ednotlivé stop odpovídaícím mikročočkám, stále eistue několik možností, ak tento problém obeít:! Použít Shackův-Hartmannův senzor s větším dnamickým rozsahem, t. s kratší ohniskovou vzdáleností mikročoček nebo s většími rozměr subapertur.! Pokud se vlnoplocha dopadaícího záření nemění v čase (nebo se mění en minimálně), e možné umístit prostorový modulátor světla před nebo za pole mikročoček. Tento modulátor potom bude řízen tak, ab znemožnil průchod světla na všech subaperturách kromě ediné a dík tomu budeme mít istotu, že světlo prošlo konkrétní mikročočkou bez ohledu na to, kam dopadne detekovaná stopa. Steně se pokračue i na dalších subaperturách až se postupně proskenuí všechn. Eventuálně e možné mít v ednom okamžiku otevřenou neen ednu subaperturu, ale pokud budou vhodně prostorově separován, může být otevřeno více subapertur naednou, což pochopitelně zrchlí celý proces skenování.! Použít některou z alternativních metod rekonstrukce vlnoploch, e však nutné si ověřit, zda zvolená metoda dává správné výsledk. Rozhodneme-li se přesto v těchto případech pro rekonstrukci vlnoploch standardními metodami (modální nebo zonální), musíme počítat s tím, že použitý software může ignorovat subapertur, ve kterých e zaznamenáno více stop nebo naopak v nich není detekována žádná stopa, v horším případě se však může stát, že výsledný tvar vlnoploch nebude odpovídat realitě. Další informace týkaící se této problematik a srovnání algoritmů e možné nalézt například v [6-3] Rekonstrukce vlnoploch Nakonec se dostáváme k hlavnímu cíli, což znamená zistit tvar měřené vlnoploch, respektive eí deformace. Známe ted hodnot gradientu neznámé funkce dvou proměnných na určité oblasti a na základě těchto hodnot potřebueme provést matematickou rekonstrukci a funkci vlnoploch konkrétním způsobem definovat. Současně však budeme předpokládat, že 4
19 měřené hodnot gradientu vlnoploch g (, ) sou zatížen určitými chbami ( ) zkresluí skutečné hodnot gradientu vlnoploch, ted (, ) + n(, ) = g( ) n,, které W,. (2.8) Pochopitelně se snažíme, ab odchlk měřených a skutečných hodnot bl co nemenší, e proto zapotřebí minimalizovat funkcionál [ W ( ) g( ) ]dd F =,,. (2.9) Eistue více způsobů, ak provést rekonstrukci vlnoploch. Norma ISO [4] uvádí dvě možnosti, a to modální a zonální rekonstrukci. Modální metoda e založena na globální aproimaci vlnoploch pomocí vhodných polnomů a dochází tak k určitému vhlazení tvaru vlnoploch. Naopak u zonální metod se používá integrace hodnot gradientu a proto b se dalo říci, že výsledek více odpovídá naměřeným hodnotám, protože nedochází k zmíněnému vhlazování. U této metod se však zase více proeví šum a různé fluktuace. Základní vzorce pro rekonstrukci oběma způsob sou uveden dále, podrobněší popis e možné nalézt v [5]. V literatuře [4-2] sou také uveden informace o možnostech rekonstrukce vlnoploch včetně popisu alternativních metod rekonstrukce. Modální metoda Výhodou této metod e, že po rekonstrukci dostaneme analtické vádření tvaru vlnoploch, se kterým e možné provádět další matematické operace. Postupue se tak, že funkci vlnoploch W a (, ) vádříme pomocí soustav vhodných polnomů P k (, ) kde W a M ( ) = A P (, ),, (2.20) k = 0 k k A k sou koeficient aproimace, které chceme zistit a M e počet polnomů, které použieme k rekonstrukci. Nečastěi se používaí Zernikeov polnom v případě, kd na senzor dopadá svazek s kruhovým průřezem, a Legendreov polnom pro svazek s obdélníkovým průřezem. Při měření kvalit optických sstémů se právě vužívá skutečnosti, že vpočtené koeficient některých Zernikeových polnomů přímo vadřuí velikosti určitých aberací. Nedoporučue se však používat tuto metodu u svazků s nepravidelným průřezem, nebo pokud sou ve svazku přítomn vsoké prostorové frekvence (např. po průchodu Fresnelovou čočkou). Abchom ted dostali požadované koeficient e potřeba vužít vztahů (2.), což vede k soustavě lineárních rovnic A k, 5
20 6 ( ) ( ) = = = M k k k a P A W f 0,,, ( ) ( ) = = = M k k k a P A W f 0,,, (2.2) kde N e počet bodů ( N,...,,2 = ), ve kterých bl změřen odchlk středů stop a. Je možné, že některé bod nebudou zahrnut do výpočtu, například kdž provádíme rekonstrukci Zernikeovými polnom z dat získaných ze senzoru s obdélníkovým profilem. Zernikeov polnom sou totiž definován na ednotkovém kruhu, enž e obvkle škálován tak, ab pokrýval co nevětší plochu senzoru, ale zároveň nezasahoval mimo ni (tzn. kruh e vepsán do profilu senzoru). Řešení uvedené soustav rovnic se obvkle provádí pomocí metod nemenších čtverců, což můžeme zapsat v maticovém tvaru g a G =, (2.22) kde matice G e dána ako ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = P P P P P P P P G N N M N N N N M N N M M,,,,,,,, L L M O M M L L, (2.23) pro vektor hledaných koeficientů a platí ( ) M T A A A a,..., 0, = (2.24) a pro vektor g průměrných hodnot gradientu v ednotlivých subaperturách ( ) N N T f g =,,...,,. (2.25) Řešení rovnice (2.22) ve smslu metod nemenších čtverců e ekvivalentní řešení soustav tzv. normálních rovnic g G a G G T T =. (2.26) Vektor hledaných koeficientů a ted vpočteme z následuící rovnice
21 T T a = G G G g. (2.27) Pokud realizueme více měření a pro rekonstrukci pokaždé používáme stenou soustavu polnomů, stačí násobení matic provést pouze ednou. Výslednou matici pak budeme pouze násobit vektorem g. Norma ISO [4] uvádí eště vztah pro případ, kd e známa statistika vlnoploch, což umožňue částečně odstranit chb měření a získat přesněší výsledk. Zonální metoda Pokud se rozhodneme pro rekonstrukci vlnoploch zonální metodou, nedostaneme analtické vádření tvaru vlnoploch, ale získáme hodnot funkce vlnoploch pro každou subaperturu, ze které bereme naměřená data, to znamená, že funkce vlnoploch bude definována pouze v určitých diskrétních bodech geometrické sítě. Hodnot funkce vlnoploch mezi těmito bod e však možné interpolovat. Jak iž blo naznačeno, rekonstrukce se provádí pomocí integračních metod, které sou aplikován na lokální okolí bodu geometrické sítě. Známe-li hodnot gradientu vlnoploch rekonstrukci podle vzorce ( ) W v ednotlivých bodech sítě, e možné provést (, ) W (, ) W, = d + d + W ( 0, ), (2.28) W 0 C kde C e křivka, spouící bod sítě ( 0, 0 ) a ( ) C,, po které probíhá integrace. Jelikož známe hodnot gradientu vlnoploch pouze v určitých bodech, řeší se integrace pomocí numerických metod, nebo e možné úlohu převést na soustavu diferenčních rovnic [5], které e možné řešit ve smslu metod nemenších čtverců. Jsou-li změřená data gradientu vlnoploch rozprostřena na Kartézské síti s roztečí δ, můžeme za použití diferenčních vztahů vpočítat pro každý bod sítě, ležící uvnitř vhodnocované oblasti, hodnotu funkce vlnoploch W. Vdeme ze známých hodnot gradientu ( W ) ( i, ) a ( i, +) W, ve směru a pro každou dvoici bodů ( i, ) a ( i, ) +, respektive. Pokud zvolíme neednodušší a neběžněi používané diferenční vztah pro aproimaci gradientu vlnoploch, dostaneme soustavu lineárních rovnic pro neznámé hodnot vlnoploch W, v bodech ( i, ) i 7
22 δ 2 δ 2 ( i Wi ) = Wi Wi W +, +, +,, ( i Wi ) = Wi Wi W, + +,, +, Tuto soustavu rovnic e možné převést do maticového tvaru,. (2.29) A w = g, (2.30) kde g e vektor odpovídaící změřeným hodnotám gradientu vlnoploch, A e matice soustav, která se vpočítá podle tvaru použitých diferenčních vztahů, a w e vektor obsahuící neznámé hodnot optického dráhového rozdílu všetřované vlnoploch W ve všech bodech sítě. Vzhledem k tomu, že matice A e řídká a součin matic A T A e singulární, e zapotřebí modifikovat tuto soustavu rovnic tak, abchom bli schopni i vřešit. Obvkle se matice A rozšíří o eden řádek, v němž sou všechn prvk rovn edné, a vektor g se rozšíří o prvek rovný nule. Takto modifikovanou soustavu A e w = g e (2.3) pak iž lze řešit standardním způsobem ve smslu metod nemenších čtverců ted A A w = A g, (2.32) T e e T e e T T w = Ae Ae Ae g e. (2.33) Tento vztah e velice podobný rovnici (2.27), používané pro modální rekonstrukci. Zde však nepočítáme koeficient polnomů, ale přímo hodnot funkce vlnoploch W v ednotlivých bodech geometrické sítě. Také v tomto případě e možné zrchlit výpočet dík skutečnosti, že součin matic stačí provést pouze ednou, neboť při následných měřeních se bude měnit pouze vektor g. Použití zonální metod rekonstrukce vlnoploch e preferováno v situacích, kd má dopadaící svazek nepravidelný tvar, nebo v případech, kd e nežádoucí globální průměrování dat, ke kterému dochází při modální rekonstrukci kvůli omezenému počtu polnomů. Zonální metoda však umožňue vhodnocovat i vsoké prostorové frekvence tvaru vlnoploch. 8
23 2.3.7 Záznam vlnoploch Od rekonstruované vlnoploch b se měl odečíst náklon v osách a a takto korigovaná vlnoplocha nebo ekvivalentní fázová distribuce b měla být zaznamenána do testovací zpráv ve formě tabulk dat, vektorového diagramu, trorozměrného grafu, vrstevnicového grafu nebo interferogramu. To e však nutné pouze v případě, že budou data posílána k dalšímu vhodnocení. Pro interní potřeb většinou úplně stačí uložit data v používané softwarové aplikaci. 2.4 Analýza chb měření a zpracování dat Měření a následné vhodnocení fáze vlnového pole pomocí Shackova-Hartmannova senzoru může být ovlivněno různými chbami, což má vliv na výslednou přesnost a opakovatelnost měření. Některé zdroe chb sou sstematické povah a lze e odstranit správnou kalibrací senzoru. V následuících podkapitolách sou tto chb popsán podrobněi, eště detailněší rozbor e možné nalézt například v [2], [22-23] Chb z neistot geometrických parametrů senzoru U geometrických rozměrů ednotlivých součástí senzoru vlnoploch (pole mikročoček a detektor záření) nelze nikd zaručit, že budou vžd přesně odpovídat nominálním hodnotám, ale sou udáván s určitými tolerancemi. Je proto logické, že ani výsledný senzor nemůže měřit s absolutní přesností. Pro Shackův-Hartmannův senzor e edním z důležitých parametrů vzdálenost rovin mikročoček od rovin detektoru záření. Rovina detektoru bývá nečastěi umístěna v ohniskové rovině mikročoček, ale i eich ohnisková vzdálenost se může mírně lišit. Předpokládeme, že vzdálenost mezi rovinou mikročoček a detektoru bude mít chbu δ f, potom průměrná hodnota gradientu vlnoploch dopadaící na danou mikročočku e dána vztahem = f + δf = f + δf S S W dd S W dd S = W = W,. (2.34) 9
24 Pokud bchom chbu zanedbali ( f = 0) δ, pak platí v souladu s (2.) W 0 = / f a W 0 = / f. Pro relativní chbu derivace vlnoploch, která e způsobena vlivem nesprávné hodnot vzdálenosti f ted můžeme psát W W 0 = W W 0 = δf f + δf. (2.35) Můžeme si nní představit výrobce, který b chtěl produkovat sérii Shackových- Hartmannových senzorů a nakupoval b pole mikročoček, u něhož e pro ohniskovou vzdálenost uváděna tolerance pod 3 %. Pokud b dodržoval stále stenou vzdálenost mezi rovinou mikročoček a detektorem záření, potom b maimální relativní chba gradientu vlnoploch bla rovněž přibližně tři procenta. Některé postup pro minimalizaci této chb a kalibraci senzoru sou uveden v [2] Chb při referenčním měření Další možnou příčinou vzniku chb měření e skutečnost, že vlnoplocha, kterou považueme za referenční, už může být určitým způsobem deformována. Nečastěi se ako referenční používá rovinná vlnoplocha, avšak při kolimaci optickou soustavou generueme vlnu, která se od ideální rovinné vln více či méně odlišue. Následné měření, které e vztaženo k referenční vlnoploše e poté touto chbou ovlivněno. Tvar generované referenční vlnoploch e možné ověřit například pomocí interferometrických metod. Tato chba má sstematickou povahu a e možné i z prováděných měření odstranit odečtením Chb v důsledku vzáemného pootočení pole mikročoček a detektoru Chb rovněž vznikaí tehd, pokud rovin pole mikročoček a detektoru nesou paralelní. Taktéž může doít i k vzáemné rotaci těchto komponent kolem podélné os z. Tento případ e však relativně snadno zistitelný, neboť při referenčním měření rovinné vlnoploch e síť světelných stop v detekovaném obraze také pootočena. Pokud e kupován iž hotový Shackův-Hartmannův senzor, není potřeba těmto chbám věnovat pozornost, neboť výrobci sou schopni tato pootočení dostatečně dobře eliminovat. 20
25 2.4.4 Chb v důsledku principiálních omezení senzoru Tto chb vznikaí při nedostatečném prostorovém vzorkování dopadaící vlnoploch, inak řečeno, rozměr subapertur senzoru sou příliš malé na to, ab mohl být tvar vlnoploch spolehlivě rekonstruován. Jak iž blo dříve uvedeno, obvkle se uvažue, že gradient vlnoploch na subapertuře má přibližně konstantní hodnotu. Pokud tomu tak ve skutečnosti není, e zřemé, že to může vést ke vzniku chb. Na obr. 6 e ukázán příklad, kd právě dochází k chbám v důsledku nedostatečného prostorového vzorkování vlnoploch. Je zřetelně vidět, že tvar rekonstruované vlnoploch vůbec neodpovídá tvaru dopadaící vlnoploch. Obr. 6: Nedostatečné prostorové vzorkování vlnoploch polem mikročoček Obr. 7: Nemožnost správného vhodnocení nespoité změn tvaru vlnoploch 2
26 Podobný případ nastane také v situaci, kd se ve tvaru dopadaící vlnoploch vsktuí skokové změn. I v tomto případě bude tvar rekonstruované vlnoploch odlišný od skutečného (viz obr. 7). Zatímco však chb v důsledku nedostatečného prostorového vzorkování e možné odhalit použitím senzoru s menšími rozměr mikročoček, v případě nespoitých změn tvaru vlnoploch se edná o principiální omezení, a tto změn vůbec není možné Shackovým-Hartmannovým senzorem zachtit. V prai se však vlnoploch s takovýmto tvarem vsktuí en zřídka Chb v určení správné pozice energetických středů stop Při výpočtu pozice intenzitního těžiště stop dochází k chbám, ež sou zapříčiněn šumem v detekovaném obrazu, prostorovým vzorkováním digitálního obrazu pomocí plošného maticového detektoru záření, kvantováním šedotónových úrovní digitálního obrazu a nepřesností samotné metod určování těžiště rozdělení intenzit. Pokud e to zapotřebí, lze vliv šumu v detekovaném signálu omezit pomocí digitálního zpracování, nečastěi se k tomuto účelu používá spektrální filtr tpu dolní propust. Prostorové vzorkování a kvantování úrovní obrazu lze částečně omezit vhodným výběrem plošného detektoru záření. Nepřesnost samotné metod může být způsobena prahováním. Při nízké prahové hodnotě se stále může proevovat šum, naopak při vsoké prahové hodnotě může docházet k znehodnocení užitečného signálu, což se v konečném důsledku proeví i na výsledné poloze intenzitního těžiště stop. Další chba e pak způsobována tím, že výpočet e prováděn diskrétně, neboť nemáme k dispozici spoitý signál, místo integrace se ted používá sumace po ednotlivých pielech Chb numerické metod pro rekonstrukci vlnoploch Při rekonstrukci vlnoploch modální metodou dochází k chbám, elikož počet polnomů e konečný a vliv polnomů všších řádů se zanedbává. To vede k určitému vhlazení vlnoploch a e to mnohd vidět při porovnání se zonální metodou rekonstrukce. Avšak i u zonální metod může docházet k chbám, ež souvisí s celkovým počtem a geometrickým uspořádáním bodů sítě, na níž známe měřené hodnot gradientu. U obou rekonstrukčních metod dále dochází k chbám v důsledku šumu, který se vsktue v naměřených datech. 22
27 3 Eperiment se senzorem 3. Parametr senzoru Na katedře optik Přírodovědecké fakult se nacházeí dva Shackov-Hartmannov senzor. Jeden z nich však iž bl začleněn do sstému pro adaptivní optiku a proto neblo možné na něm provádět eperiment. Všechna měření bla proto prováděna na druhém senzoru HASO3 28-GE od firm Imagine Optic. Následue shrnutí eho parametrů: - počet mikročoček tvar mikročoček čtvercový - ohnisková vzdálenost mikročoček 5 mm - aktivní plocha 4,6 4,6 mm - počet pielů v edné subapertuře 6 6 p - rozměr subapertur 4 4 µm - opakovatelnost (rms) < λ / přesnost měření vlnoploch v relativním módu λ / 50 - přesnost měření vlnoploch v absolutním módu λ / 00 - citlivost na náklon < µrad Obr. 8: Shackův-Hartmannův senzor vlnoploch na katedře optik. Na obrázku e zakrt stínítkem s dírkou, ež slouží k ukolmení senzoru 23
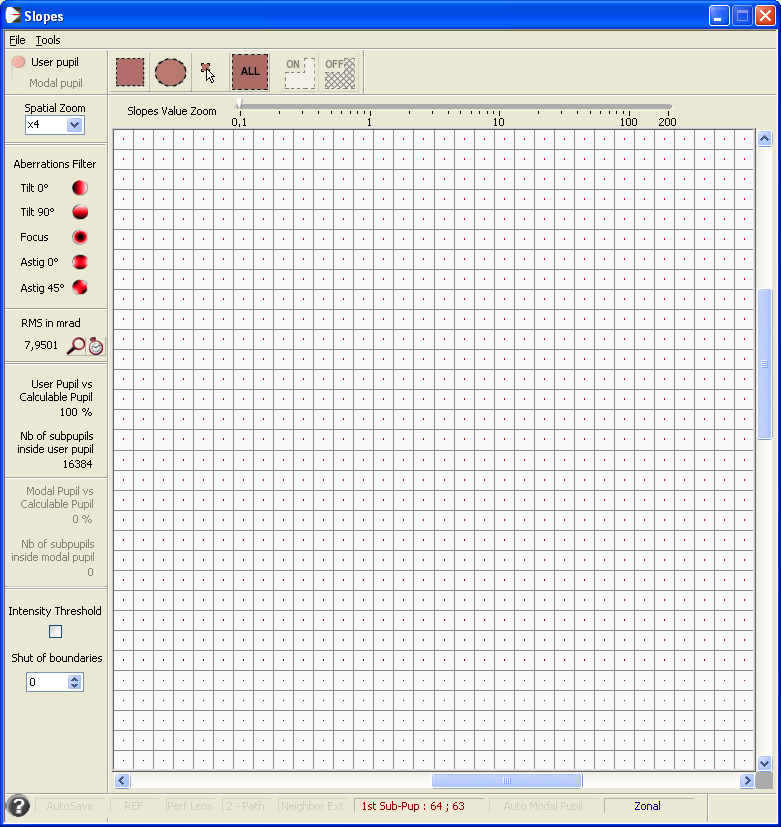
28 3.2 Program HASO K uvedenému senzoru e dodáván také program HASO určený k obsluze senzoru. Po spuštění se program spoí se senzorem, pokud e v provozu. Před započetím měření e potřeba provést kompenzaci náklonů (ukolmení) senzoru. Proto se senzor zakre stínítkem, ve kterém e malá dírka a tak světlo dopadá pouze do několika subapertur. Software vhodnocue, zda sou náklon senzoru v toleranci. Pokud ne, e zobrazen červený bod, po vrovnání náklonů se eho barva změní na zelenou. Poté e možné stínítko odstranit a provádět vlastní měření. Obr. 9: Kompenzace náklonů senzoru v programu HASO Program dále umožňue zobrazit zaznamenanou intenzitu, gradient a vlnoplochu, kterou e možné rekonstruovat zonální i modální metodou. Na PC, které e na katedře optik neblo možné přinutit software, ab prováděl modální rekonstrukci. Původně se proto uvažovalo, že vtvořím vlastní program, který b tento výpočet prováděl. Nakonec se mi však podařilo na mém PC modální rekonstrukci zprovoznit a od vývoe programu blo upuštěno. Následuí ukázk možností programu HASO, ako příklad bla použita sférická vlnoplocha, která vznikla osvícením senzoru laserovým svazkem z optického vlákna. 24
29 25
30 26

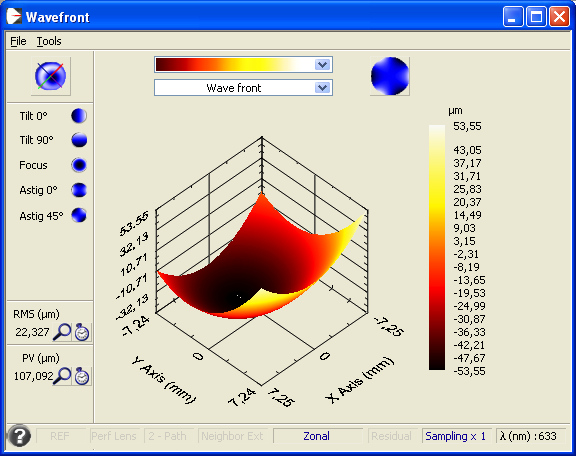
31 Obr. 0: Možnosti programu HASO rozložení intenzit, gradient (výřez), vlnoplocha rekonstruovaná zonální metodou bez a s kompenzací náklonů, vlnoplocha rekonstruovaná modální metodou bez kompenzací náklonů a modální koeficient. 27

32 3.3 Funkce pro import dat z programu HASO do prostředí MATLAB Program HASO také umožňue eport dat do tetových souborů. Ab blo možné tato data dále zpracovat v programu MATLAB, vtvořil sem funkci HasoLoad, která takový import umožňue. Funkce se volá se dvěma parametr, první e název tetového souboru, který chceme importovat a druhý udává, kolik řádků na začátku souboru má být ignorováno. Program HASO tam totiž ukládá některé údae, vlastní data však začínaí až dále. Při načítání gradientů a intenzit e potřeba ignorovat první 3 řádk, u souborů vlnoploch dokonce 5 řádků. Funkce e napsána tak, že data budou uložena do matice 2828, e ted přímo dělána pro senzor HASO na katedře optik, ež má stený počet mikročoček. Může se stát, že v tetovém souboru není pro některé buňk definována žádná hodnota (např. při modální rekonstrukci Zernikeovými polnom, které sou definován na kruhu, budou v rozích nedefinované hodnot). Takové hodnot budou při importu nahrazen nulami. Je však možné funkci modifikovat i tak, že do matice místo takových hodnot zapíše tzv. NaN (not a number). Závěrem musím upozornit, že programování v MATLABu sem se věnoval poprvé, funkce ted není niak optimalizována a samotné načítání dat trvá poměrně dlouho. Soubor HasoLoad.m s touto funkcí se nachází na přiloženém CD. Obr. : Import dat do prostředí MATLAB 3.4 Měření sférické aberace čočk Cílem e proměřit vlnoplochu vtvořenou ednoduchou plankonvení čočkou, která vkazue nekompenzovanou sférickou vadu 3. řádu, a následně ověřit eperimentální výsledk výpočtem. Postup provedení testu:! Pomocí Shackova-Hartmannova senzoru bla proměřena deformace vlnoploch rovinné vln, která bla kolimována plankonvení čočkou Thorlabs o ohniskové vzdálenosti 00 mm a optickém průměru 25,4 mm. Jako bodový zdro blo použito 28

33 čelo ednomódového vlákna se zářením He-Ne laseru o vlnové délce 632,8 nm. Měření blo provedeno ve dvou orientacích čočk: pozice I čočka e otočena rovinnou plochou k senzoru, pozice II čočka e otočena konvení plochou k senzoru. V obou případech blo podélným posunem zdroe provedeno nastavení minimální deformace vlnoploch.! V programu Oslo bla vpočtena maimální hodnota podélné sférické vad. Za předpokladu, že nekorigovaný průběh odpovídá sférické vadě 3. řádu, bl určen úhlové aberace. Z úhlových aberací bl v programu Matlab vpočten vlnové aberace udávaící deformaci vlnoploch kolimovaného svazku. Postup výpočtu vlnových aberací odpovídá způsobu eich měření pomocí Shackova-Hartmannova senzoru. Do výpočtu bl rovněž zahrnut vliv přeostřovacího posuvu vlákna.! V programu Oslo bl vpočten vlnové aberace fokusované vln. Přímý výpočet deformace kolimované vln program neumožňue. Měření deformace vlnoploch Obr. 2: Schéma měření Obr. 3: 3D znázornění vlnoploch pro orientaci čočk I výstup programu HASO 29
 Deformace sférické vln při fokusaci, (b) deformace rovinné vln při kolimaci Úhlové aberace kolimované vln θ, θ e možné pro ednotlivé paprsk vpočítat z odpovídaících hodnot podélné sférické vad")
34 Obr. 4: 3D znázornění vlnoploch pro orientaci čočk II výstup programu HASO Výpočet deformace vlnoploch Obr. 5: (a) Deformace sférické vln při fokusaci, (b) deformace rovinné vln při kolimaci Úhlové aberace kolimované vln θ, θ e možné pro ednotlivé paprsk vpočítat z odpovídaících hodnot podélné sférické vad čočk, f ' e ohnisková vzdálenost): tan θ = f ' tan θ = f ' z ( f ' z) z Obecný zápis vlnové vad fokusované vln: ( f ' z) z θ, 2 f ' z θ. 2 f ' z (, sou souřadnice v rovině (3.) W = A r, (3.2) 30
35 kde r = r ρ e normovaná radiální souřadnice v rovině čočk ( r e radiální souřadnice v rovině čočk a D = 2ρ e průměr svazku zachcený Shackovým-Hartmannovým senzorem). Určení koeficientu vlnové vad fokusované vln z podélné složk sférické vad: A z = ρ. 2 2 (3.3) 4 f ' r Úhlové aberace maí přímý vztah s deformací vlnoploch kolimované vln W : W ' θ =, W ' θ =. (3.4) 4 Integrací dostaneme W ' = A 040 r. Tento výsledek ukazue, že vlnová vada kolimované vln e rovna vlnové vadě vln fokusované, W ' = W. Pro nekorigovanou sférickou vadu e maimální hodnota vlnové aberace přímo určena aberačním koeficientem A = ρ 2 z ( 4 ' 2 ), (3.5) kde M 040 M f z e maimální hodnota podélné sférické vad, která odpovídá normované radiální souřadnici r =. Minimalizace deformace vlnoploch, která se eperimentálně provádí podélným posuvem bodového zdroe, bla ve výpočtu simulována zahrnutím defokusačního členu s koeficientem A 020. Výsledná vlnová aberace pak nabývá tvaru: 4 2 W = A r + A. (3.6) r Maimalizací Strehlova koeficientu se dá určit optimální hodnota koeficientu přeostření A020 = A 040. (3.7) Praktické provedení výpočtu deformace vlnoploch kolimované vln. Čočk Thorlabs sou vroben ze skla BK7, které má pro záření He-Ne laseru inde lomu n =,58. Parametr čočk o ohniskové vzdálenosti f ' = 00 mm bl zadán do programu Oslo. Pro průměr svazku, který e zachcen Shackovým-Hartmannovým senzorem ( D = 4,6 mm), bl vhodnocen průběh podélné sférické vad. Stav sférické vad bl vhodnocen pro obě měřené orientace čočk I a II. 3
36 Analýza vlnoploch pro orientaci I (čočka otočena rovinnou plochou k senzoru) Obr. 6: Podélná sférická vada (čočka v orientaci I) Deformace vlnoploch vpočtená v programu Matlab pro orientaci čočk I Pomocí (3.3) bl z maimální hodnot podélné sférické vad z M vpočten koeficient sférické vad 3. řádu A 040. Koeficient přeostření bl zvolen z podmínk maimalizace Strehlova kriteria ako A =. Volbou koeficientu přeostření e možné 020 A 040 dosáhnout toho, že minimum vlnové vad má příčnou pozici, která přesně odpovídá nastavení v eperimentu. Obr. 7: Deformace vlnoploch vpočtená v programu Matlab pro orientaci čočk I 32
. Teoretický výpočet ukazue, že vlnové aberace kolimované i fokusované vln sou stené.")
37 Deformace vlnoploch bla vpočtena přímo v programu Oslo Premium pro fokusovanou vlnu vlnové aberace představuí odchlk fokusované vln od referenční sfér. V případě měření se určue deformace kolimované vln (referenční vlnou e rovinná vlna). Teoretický výpočet ukazue, že vlnové aberace kolimované i fokusované vln sou stené. Vlnové aberace kolimované vln nelze v programu Oslo přímo určit. Je zřemé, že deformace vlnoploch sou v dobré shodě s výpočtem v programu Matlab. V programu Oslo bla pro optimální zaostření použita minimalizace OPD při zobrazení osového bodu. 0.7 µm Obr. 8: Deformace vlnoploch vpočtená v programu Oslo pro orientaci čočk I Analýza vlnoploch pro orientaci II Obr. 9: Podélná sférická vada (čočka v orientaci II) 33

38 Obr. 20: Deformace vlnoploch vpočtená v programu Matlab pro orientaci čočk II 0.7 µm Obr. 2: Deformace vlnoploch vpočtená v programu Oslo pro orientaci čočk II Porovnání eperimentálních dat s výpočtem Z dat Shackova-Hartmannova senzoru, která udávaí trorozměrný tvar odchlek měřené vlnoploch na ednotlivých mikročočkách W(,), bl vtvořen 2 kolmé řez vlnoplochou W(,0) a W(0,). Tato data bla porovnána s výpočtem v programu Matlab. Přizpůsobení eperimentálních a vpočtených dat blo dosaženo vhodným výběrem koeficientu přeostření A
, -- měření W(0,)) Obr. 23: Porovnání deformací vlnoploch při orientaci čočk II ( výpočet, -.")
39 Obr. 22: Porovnání deformací vlnoploch při orientaci čočk I ( výpočet, -.- měření W(,0), -- měření W(0,)) Obr. 23: Porovnání deformací vlnoploch při orientaci čočk II ( výpočet, -.- měření W(,0), -- měření W(0,)) 35
40 Závěr:! Pomocí Shackova-Hartmannova senzoru blo provedeno měření tvaru vlnoploch kolimovaného svazku. Pro kolimaci bla použita plankonvení čočka Thorlabs (sklo BK7) o ohniskové vzdálenosti 00 mm a průměru. Měření blo provedeno pro dvě orientace čočk, které se výrazně liší sférickou vadou.! Výsledk měření sou pro obě orientace čočk v dobrém souladu s výpočtem založeným na přepočtu paprskových vad na vad vlnové. Vhodnocení eperimentálních dat a eich porovnání s výpočtem blo provedeno v programu MATLAB.! Výpočet vlnových vad fokusované vln v programu Oslo e v dobrém souladu s výsledk navrženého výpočetního modelu, který pracue s deformacemi vlnoploch kolimovaného svazku. Tím e potvrzen výpočetní závěr, že deformace fokusované vln e identická s deformací odpovídaící vln kolimované.! Nesmetrie naměřené vlnoploch může souviset s výrobními vadami čočk ale může mít původ i v nedokonalém nastavení vlákna vzhledem k čočce a čočk vzhledem k Shackovu-Hartmannovu senzoru. Blo b dobré eště zlepšit metodiku ustáže měřicího sstému. 3.5 Měření vlivu epandéru Na základě požadavku, ab blo možné měřit svazk, eichž průměr e větší než aktivní plocha Shackova-Hartmannova senzoru, bl na míru vroben epandér se zvětšením Γ = 2, který e možné přímo našroubovat na senzor firm Imagine Optic. Cílem tohoto úkolu e vhodnotit aberace epandéru, na eichž základě b pak blo možné korigovat obecnou vlnoplochu. Bohužel nebla známa přesná konfigurace čoček použitých v epandéru, a tak neblo možné provést teoretickou simulaci v programu OSLO. Rovinná vlnoplocha Jako první bla měřena rovinná vlnoplocha, neprve bez epandéru a následně s eho použitím. Pro obě měření bla vlnoplocha rekonstruována zonální metodou. Pro dosažení srovnatelných výsledků bl také softwarově vkorigován náklon. U měření s epandérem bla dále provedena interpolace na dvonásobné rozlišení, z něhož však bl následně vbrán en výsek, odpovídaící části vlnoploch zaznamenané bez epandéru. Jednoduchým odečtením pak zistíme rozdíl, které bl způsoben epandérem. Je vidět, že nemenší 36
. Obr.")
41 odchlk sou na ose a nevětší na kraích, což se dalo očekávat. Lze konstatovat, že nevětší hodnota odchlk příliš nepřevšue vlnovou délkou použitého záření ( λ = 632,8 nm). Obr. 24: Rekonstruovaná rovinná vlnoplocha bez použití epandéru Obr. 25: Rekonstruovaná rovinná vlnoplocha při použití epandéru 37
42 Obr. 26: Rozdíl rovinných vlnoploch bez epandéru a při eho použití, hodnot na svislé ose sou v µm. Sférická vlnoplocha Další měření blo prováděno s bodovým zdroem (optickým vláknem), který generue sférickou vlnoplochu a vhodnoceno obdobným způsobem. Zdro se nacházel ve vzdálenosti 4 mm od Shackova-Hartmannova senzoru. Obr. 27: Aparatura pro měření sférické vlnoploch, na Shackův-Hartmannův senzor e našroubován epandér 38
43 Obr. 28: Rekonstruovaná sférická vlnoplocha bez použití epandéru Obr. 29: Rekonstruovaná sférická vlnoplocha při použití epandéru 39
44 Obr. 30: Rozdíl sférických vlnoploch bez epandéru a při eho použití, hodnot na svislé ose sou v µm Na obr. 30 e znázorněn rozdíl sférických vlnoploch. Při měření však patrně neblo optické vlákno umístěno přesně v ose senzoru a proto vidíme, že odchlk se nevíce zvšuí ve směru os. Tento výsledek proto nedoporučui brát ako směrodatný, nelepší b blo uskutečnit nové měření, což sem však iž z časových důvodů neprovedl. Nakonec sem eště provedl výpočet zvětšení epandéru pomocí sférických vlnoploch. Program HASO udává pro měření bez epandéru rádius vlnoploch R = 49 mm. Mírná odchlka od dříve uvedené vzdálenosti e nespíše způsobena tím, že vlastní detektor e uložen poněkud hlouběi v senzoru, než blo předpokládáno. Mslím si však, že výrobce senzor nakalibroval dostatečně přesně a proto v dalším výpočtu budu používat hodnotu R. Po nasazení epandéru na senzor program HASO spočítal rádius vlnoploch R 2 = 39 mm. Z těchto hodnot vpočítáme zvětšení Γ = R / R 2 =,905. Tato hodnota přibližně odpovídá očekávanému zvětšení epandéru. 40
.")
45 Závěr:! Pomocí Shackova-Hartmannova senzoru blo provedeno měření tvaru rovinné a sférické vlnoploch vžd neprve bez a následně s použitím epandéru. Zištěné maimální aberace sou přibližně srovnatelné s vlnovou délkou záření ( λ = 632,8 nm).! Dále b blo možné provést rekonstrukci modální metodou a porovnat koeficient Zernikeových polnomů, které odpovídaí vlnovým vadám. Pro dosažení korektních výsledků b však blo zapotřebí provést větší počet měření.! Je škoda, že aktivní plocha Shackova-Hartmannova senzoru není po nasazení epandéru vužita až do kraů, ale e částečně limitována aperturou epandéru. Obr. 3: Rozložení intenzit při měření sférické vlnoploch s nasazeným epandérem. Aktivní plocha senzoru není plně vužita. 4

46 4 Použití Shackova-Hartmannova senzoru 4. Adaptivní optika Zdaleka nečastěší vužití nacházeí Shackov-Hartmannov senzor v adaptivních optických sstémech, zeména v případech, které vžaduí korekci deformované vlnoploch. Velice dobře se proto uplatňuí při astronomických pozorováních. Na obr. 32 e znázorněno schéma takového sstému. Obr. 32: Schéma adaptivního optického sstému pro astronomická pozorování Pozorovaný obekt, například hvězda, se nachází ve značné vzdálenosti od Země a dík tomu e vlnoplocha v horních vrstvách atmosfér praktick rovinná. Vlivem turbulencí se však při průchodu atmosférou vlnoplocha deformue. Tuto deformaci se právě snažíme kompenzovat adaptivním optickým sstémem umístěným za dalekohledem. Neprve ted dochází ke kolimaci svazku, poté se světlo odráží od deformovatelného zrcadla (DM) a po 42
h n i s k o v v z d á l e n o s t s p o j n ý c h č o č e k
 h n i s k o v v z d á l e n o s t s p o j n ý c h č o č e k Ú k o l : P o t ř e b : Změřit ohniskové vzdálenosti spojných čoček různými metodami. Viz seznam v deskách u úloh na pracovním stole. Obecná
h n i s k o v v z d á l e n o s t s p o j n ý c h č o č e k Ú k o l : P o t ř e b : Změřit ohniskové vzdálenosti spojných čoček různými metodami. Viz seznam v deskách u úloh na pracovním stole. Obecná
Centrovaná optická soustava
 Centrovaná optická soustava Dvě lámavé kulové ploch: Pojem centrovaná optická soustava znamená, že splývají optické os dvou či více optických prvků. Základním příkladem takové optické soustav jsou dvě
Centrovaná optická soustava Dvě lámavé kulové ploch: Pojem centrovaná optická soustava znamená, že splývají optické os dvou či více optických prvků. Základním příkladem takové optické soustav jsou dvě
Fyzikální korespondenční seminář UK MFF 22. II. S
 Fzikální korespondenční seminář UK MFF http://fkosmffcunicz II S ročník, úloha II S Young a vlnová povaha světla (5 bodů; průměr,50; řešilo 6 studentů) a) Jaký tvar interferenčních proužků na stínítku
Fzikální korespondenční seminář UK MFF http://fkosmffcunicz II S ročník, úloha II S Young a vlnová povaha světla (5 bodů; průměr,50; řešilo 6 studentů) a) Jaký tvar interferenčních proužků na stínítku
Optika pro mikroskopii materiálů I
 Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ
 VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
Skládání různoběžných kmitů. Skládání kolmých kmitů. 1) harmonické kmity stejné frekvence :
 harmonické kmity stejné frekvence :") Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Příklady použití tenkých vrstev Jaromír Křepelka
 Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 2000/2001 Michal Marvan
 Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 000/00 Michal Marvan 3. Matice lineárního zobrazení V této přednášce budeme používat indexy dvoího druhu:
Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 000/00 Michal Marvan 3. Matice lineárního zobrazení V této přednášce budeme používat indexy dvoího druhu:
Pozorování Slunce s vysokým rozlišením. Michal Sobotka Astronomický ústav AV ČR, Ondřejov
 Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
Optické měřicí 3D metody
 Univerzita Palackého v Olomouci Přírodovědecká fakulta Optické měřicí 3D metod Michal Pochmon Olomouc 212 Oponent: RNDr. Tomáš Rössler Ph.D. Publikace bla připravena v rámci projektu Investice do rozvoje
Univerzita Palackého v Olomouci Přírodovědecká fakulta Optické měřicí 3D metod Michal Pochmon Olomouc 212 Oponent: RNDr. Tomáš Rössler Ph.D. Publikace bla připravena v rámci projektu Investice do rozvoje
6. DIFERENCIÁLNÍ POČET FUNKCE VÍCE PROMĚNNÝCH
 Funkce více proměnných 6 DIFERENCIÁLNÍ POČET FUNKCE VÍCE PROMĚNNÝCH Ve čtvrté kapitole jsme studovali vlastnosti funkcí jedné nezávisle proměnné K popisu mnoha reálných situací však s jednou nezávisle
Funkce více proměnných 6 DIFERENCIÁLNÍ POČET FUNKCE VÍCE PROMĚNNÝCH Ve čtvrté kapitole jsme studovali vlastnosti funkcí jedné nezávisle proměnné K popisu mnoha reálných situací však s jednou nezávisle
Geometrická optika. předmětu. Obrazový prostor prostor za optickou soustavou (většinou vpravo), v němž může ležet obraz - - - 1 -
, v němž může ležet obraz - - - 1 -") Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Konstrukční varianty systému pro nekoherentní korelační zobrazení
 Konstrukční varianty systému pro nekoherentní korelační zobrazení Technický seminář Centra digitální optiky Vedoucí balíčku (PB4): prof. RNDr. Radim Chmelík, Ph.D. Zpracoval: Petr Bouchal Řešitelské organizace:
Konstrukční varianty systému pro nekoherentní korelační zobrazení Technický seminář Centra digitální optiky Vedoucí balíčku (PB4): prof. RNDr. Radim Chmelík, Ph.D. Zpracoval: Petr Bouchal Řešitelské organizace:
ρ = 0 (nepřítomnost volných nábojů)
") Učební text k přednášce UFY Světlo v izotropním látkovém prostředí Maxwellovy rovnice v izotropním látkovém prostředí: B rot + D rot H ( r, t) div D ρ rt, ( ) div B a materiálové vztahy D ε pro dielektrika
Učební text k přednášce UFY Světlo v izotropním látkovém prostředí Maxwellovy rovnice v izotropním látkovém prostředí: B rot + D rot H ( r, t) div D ρ rt, ( ) div B a materiálové vztahy D ε pro dielektrika
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
Fyzikální praktikum 4. Studium aberací sférických povrchů - simulace činnosti aberometru WASCA
 Ústav fyziky kondenzovaných látek Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 4 Studium aberací sférických povrchů - simulace činnosti aberometru WASCA Domácí příprava Odvod
Ústav fyziky kondenzovaných látek Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 4 Studium aberací sférických povrchů - simulace činnosti aberometru WASCA Domácí příprava Odvod
P. Bartoš a J. Tesař
 POČÍTAČOVÉ MODELOVÁNÍ DOPPLEROVA JEVU V MATLABU A NĚKTERÉ MOŽNÉ APLIKACE VE VÝUCE FYZIKY P. Bartoš a J. Tesař Katedra fzik, Pedagogická fakulta Jihočeské univerzit, Jeronýmova 1, České Budějovice Abstrakt:
POČÍTAČOVÉ MODELOVÁNÍ DOPPLEROVA JEVU V MATLABU A NĚKTERÉ MOŽNÉ APLIKACE VE VÝUCE FYZIKY P. Bartoš a J. Tesař Katedra fzik, Pedagogická fakulta Jihočeské univerzit, Jeronýmova 1, České Budějovice Abstrakt:
3. Diskutujte výsledky měření z hlediska platnosti Biot-Savartova zákona.
 1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
PRAKTIKUM III. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009.
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. XXVI Název: Vláknová optika Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009 Odevzdal dne: Možný počet bodů
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. XXVI Název: Vláknová optika Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009 Odevzdal dne: Možný počet bodů
Laboratorní úloha č. 7 Difrakce na mikro-objektech
 Laboratorní úloha č. 7 Difrakce na mikro-objektech Úkoly měření: 1. Odhad rozměrů mikro-objektů z informací uváděných výrobcem. 2. Záznam difrakčních obrazců (difraktogramů) vzniklých interakcí laserového
Laboratorní úloha č. 7 Difrakce na mikro-objektech Úkoly měření: 1. Odhad rozměrů mikro-objektů z informací uváděných výrobcem. 2. Záznam difrakčních obrazců (difraktogramů) vzniklých interakcí laserového
Maticová optika. Lenka Přibylová. 24. října 2010
 Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Úloha 3: Mřížkový spektrometr
 Petra Suková, 2.ročník, F-14 1 Úloha 3: Mřížkový spektrometr 1 Zadání 1. Seřiďte spektrometr pro kolmý dopad světla(rovina optické mřížky je kolmá k ose kolimátoru) pomocí bočního osvětlení nitkového kříže.
Petra Suková, 2.ročník, F-14 1 Úloha 3: Mřížkový spektrometr 1 Zadání 1. Seřiďte spektrometr pro kolmý dopad světla(rovina optické mřížky je kolmá k ose kolimátoru) pomocí bočního osvětlení nitkového kříže.
SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC
 SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC Pojm: Algebraická rovnice... rovnice obsahující pouze celé nezáporné mocnin neznámé, tj. a n n + a n 1 n 1 +... + a 2 2 + a 1 + a 0 = 0, kde n je přirozené číslo.
SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC Pojm: Algebraická rovnice... rovnice obsahující pouze celé nezáporné mocnin neznámé, tj. a n n + a n 1 n 1 +... + a 2 2 + a 1 + a 0 = 0, kde n je přirozené číslo.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY. OPTICKÝ SPOJ LR-830/1550 Technický popis
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY OPTICKÝ SPOJ LR-830/1550 Technický popis BRNO, 2009 1 Návrh a konstrukce dálkového spoje 1.1 Optická
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY OPTICKÝ SPOJ LR-830/1550 Technický popis BRNO, 2009 1 Návrh a konstrukce dálkového spoje 1.1 Optická
Fotografický aparát. Fotografický aparát. Fotografický aparát. Fotografický aparát. Fotografický aparát. Fotografický aparát
 Michal Veselý, 00 Základní části fotografického aparátu tedy jsou: tělo přístroje objektiv Pochopení funkce běžných objektivů usnadní zjednodušená představa, že objektiv jako celek se chová stejně jako
Michal Veselý, 00 Základní části fotografického aparátu tedy jsou: tělo přístroje objektiv Pochopení funkce běžných objektivů usnadní zjednodušená představa, že objektiv jako celek se chová stejně jako
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Měření optických vlastností materiálů
 E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
Univerzita Tomáše Bati ve Zlíně
 Univerzita Tomáše Bati ve líně LABORATORNÍ CVIČENÍ YIKY II Název úloh: Měření ohniskové vzdálenosti čočk Jméno: Petr Luzar Skupina: IT II/ Datum měření:.listopadu 007 Obor: Informační technologie Hodnocení:
Univerzita Tomáše Bati ve líně LABORATORNÍ CVIČENÍ YIKY II Název úloh: Měření ohniskové vzdálenosti čočk Jméno: Petr Luzar Skupina: IT II/ Datum měření:.listopadu 007 Obor: Informační technologie Hodnocení:
EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU. A.Mikš 1, V.Obr 2
 EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU A.Mikš, V.Obr Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt:
EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU A.Mikš, V.Obr Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt:
Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM. Fyzikální praktikum 2
 Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM Fyzikální praktikum 2 Zpracoval: Markéta Kurfürstová Naměřeno: 16. října 2012 Obor: B-FIN Ročník: II Semestr: III
Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM Fyzikální praktikum 2 Zpracoval: Markéta Kurfürstová Naměřeno: 16. října 2012 Obor: B-FIN Ročník: II Semestr: III
Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje
 Optické zobrazování Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje Základní pojmy Optické zobrazování - pomocí paprskové (geometrické) optiky - využívá model světelného
Optické zobrazování Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje Základní pojmy Optické zobrazování - pomocí paprskové (geometrické) optiky - využívá model světelného
Příloha č. 1. amplitudová charakteristika filtru fázová charakteristika filtru / frekvence / Hz. 1. Určení proudové hustoty
 Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
SBÍRKA ŘEŠENÝCH FYZIKÁLNÍCH ÚLOH
 SBÍRKA ŘEŠENÝCH FYZIKÁLNÍCH ÚLOH MECHANIKA MOLEKULOVÁ FYZIKA A TERMIKA ELEKTŘINA A MAGNETISMUS KMITÁNÍ A VLNĚNÍ OPTIKA FYZIKA MIKROSVĚTA ODRAZ A LOM SVĚTLA 1) Index lomu vody je 1,33. Jakou rychlost má
SBÍRKA ŘEŠENÝCH FYZIKÁLNÍCH ÚLOH MECHANIKA MOLEKULOVÁ FYZIKA A TERMIKA ELEKTŘINA A MAGNETISMUS KMITÁNÍ A VLNĚNÍ OPTIKA FYZIKA MIKROSVĚTA ODRAZ A LOM SVĚTLA 1) Index lomu vody je 1,33. Jakou rychlost má
Simulace zpracování optické obrazové informace v Matlabu. Petr Páta, Miloš Klíma, Jaromír Schindler
 Simulace zpracování optické obrazové informace v Matlabu Petr Páta, Miloš Klíma, Jaromír Schindler Katedra radioelektroniky, K337, ČVUT FEL Praha, Technická, 166 7, Praha 6 E-mail: pata@fel.cvut.cz, klima@fel.cvut.cz,
Simulace zpracování optické obrazové informace v Matlabu Petr Páta, Miloš Klíma, Jaromír Schindler Katedra radioelektroniky, K337, ČVUT FEL Praha, Technická, 166 7, Praha 6 E-mail: pata@fel.cvut.cz, klima@fel.cvut.cz,
Souřadnicové výpočty. Geodézie Přednáška
 Souřadnicové výpočt Geodézie Přednáška Souřadnicové výpočt strana 2 Souřadnicové výpočt (souřadnicová geometrie) vchází z analtické geometrie zkoumá geometrické tvar pomocí algebraických a analtických
Souřadnicové výpočt Geodézie Přednáška Souřadnicové výpočt strana 2 Souřadnicové výpočt (souřadnicová geometrie) vchází z analtické geometrie zkoumá geometrické tvar pomocí algebraických a analtických
Analytická geometrie lineárních útvarů
 ) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
Vliv komy na přesnost měření optických přístrojů. Antonín Mikš Katedra fyziky, FSv ČVUT, Praha
 Vliv komy na přesnost měření optických přístrojů Antonín Mikš Katedra fyziky, FSv ČVUT, Praha V práci je vyšetřován vliv meridionální komy na přesnost měření optickými přístroji a to na základě difrakční
Vliv komy na přesnost měření optických přístrojů Antonín Mikš Katedra fyziky, FSv ČVUT, Praha V práci je vyšetřován vliv meridionální komy na přesnost měření optickými přístroji a to na základě difrakční
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
Geometrická optika. Optické přístroje a soustavy. převážně jsou založeny na vzájemné interakci světelného pole s látkou nebo s jiným fyzikálním polem
 Optické přístroje a soustav Geometrická optika převážně jsou založen na vzájemné interakci světelného pole s látkou nebo s jiným fzikálním polem Důsledkem této t to interakce je: změna fzikáln lních vlastností
Optické přístroje a soustav Geometrická optika převážně jsou založen na vzájemné interakci světelného pole s látkou nebo s jiným fzikálním polem Důsledkem této t to interakce je: změna fzikáln lních vlastností
Rekonstrukce křivek a ploch metodou postupné evoluce
 Rekonstrukce křivek a ploch metodou postupné evoluce Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz Přehled Evoluce křivek princip evoluce použití evoluce křivky ve
Rekonstrukce křivek a ploch metodou postupné evoluce Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz Přehled Evoluce křivek princip evoluce použití evoluce křivky ve
Testování hypotéz. 1 Jednovýběrové testy. 90/2 odhad času
 Testování hypotéz 1 Jednovýběrové testy 90/ odhad času V podmínkách naprostého odloučení má voák prokázat schopnost orientace v čase. Úkolem voáka e provést odhad časového intervalu 1 hodiny bez hodinek
Testování hypotéz 1 Jednovýběrové testy 90/ odhad času V podmínkách naprostého odloučení má voák prokázat schopnost orientace v čase. Úkolem voáka e provést odhad časového intervalu 1 hodiny bez hodinek
Elektromagnetické pole je generováno elektrickými náboji a jejich pohybem. Je-li zdroj charakterizován nábojovou hustotou ( r r
 Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Měření optických vlastností materiálů
 E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
7.2.12 Vektorový součin I
 7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Řešení: Nejdříve musíme určit sílu, kterou působí kladka proti směru pohybu padajícího vědra a napíná tak lano. Moment síly otáčení kladky je:
 Přijímací zkouška na navazující magisterské studium - 16 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Jak dlouho bude padat
Přijímací zkouška na navazující magisterské studium - 16 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Jak dlouho bude padat
Návrh optické soustavy - Obecný postup
 Inovace a zvýšení atraktivity studia optiky reg. c.: CZ.1.07/2.2.00/07.0289 Přednášky - Metody Návrhu Zobrazovacích Soustav SLO/MNZS Návrh optické soustavy - Obecný postup Miroslav Palatka Tento projekt
Inovace a zvýšení atraktivity studia optiky reg. c.: CZ.1.07/2.2.00/07.0289 Přednášky - Metody Návrhu Zobrazovacích Soustav SLO/MNZS Návrh optické soustavy - Obecný postup Miroslav Palatka Tento projekt
4.2.3 ŠÍŘE FREKVENČNÍHO PÁSMA CHOROVÉHO ELEMENTU A DISTRIBUČNÍ FUNKCE VLNOVÝCH NORMÁL
 4.2.3 ŠÍŘE FREKVENČNÍHO PÁSMA CHOROVÉHO ELEMENTU A DISTRIBUČNÍ FUNKCE VLNOVÝCH NORMÁL V předchozích dvou podkapitolách jsme ukázali, že chorové emise se mohou v řadě případů šířit nevedeným způsobem. Připomeňme
4.2.3 ŠÍŘE FREKVENČNÍHO PÁSMA CHOROVÉHO ELEMENTU A DISTRIBUČNÍ FUNKCE VLNOVÝCH NORMÁL V předchozích dvou podkapitolách jsme ukázali, že chorové emise se mohou v řadě případů šířit nevedeným způsobem. Připomeňme
Fabry Perotův interferometr
 Fabry Perotův interferometr Princip Dvě zrcadla jsou sestavena tak aby tvořila tzv. Fabry Perotův interferometr, s jehož pomocí je vyšetřován svazek paprsků vycházejících z laseru. Při experimentu se pohybuje
Fabry Perotův interferometr Princip Dvě zrcadla jsou sestavena tak aby tvořila tzv. Fabry Perotův interferometr, s jehož pomocí je vyšetřován svazek paprsků vycházejících z laseru. Při experimentu se pohybuje
Aplikace III. příprava prostorových stavů světla. využití digitální holografie. výpočet hologramu. t A. U + U ref. optická rekonstrukce.
 OPT/OZI L10 Aplikace III příprava prostorových stavů světla využití digitální holografie výpočet hologramu t A U + U ref 2 optická rekonstrukce obvykle nakloněná rovinná vlna U out t A U 2 + U ref 2 +
OPT/OZI L10 Aplikace III příprava prostorových stavů světla využití digitální holografie výpočet hologramu t A U + U ref 2 optická rekonstrukce obvykle nakloněná rovinná vlna U out t A U 2 + U ref 2 +
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Regrese. používáme tehdy, jestliže je vysvětlující proměnná kontinuální pokud je kategoriální, jde o ANOVA
 Regrese používáme tehd, jestliže je vsvětlující proměnná kontinuální pokud je kategoriální, jde o ANOVA Specifikace modelu = a + bx a závisle proměnná b x vsvětlující proměnná Cíl analýz Odhadnout hodnot
Regrese používáme tehd, jestliže je vsvětlující proměnná kontinuální pokud je kategoriální, jde o ANOVA Specifikace modelu = a + bx a závisle proměnná b x vsvětlující proměnná Cíl analýz Odhadnout hodnot
Funkce dvou a více proměnných
 Funkce dvou a více proměnných. Motivace V praxi nevstačíme s funkcemi jedné proměnné, většina veličin závisí více než na jedné okolnosti, např.: obsah obdélníka: S( ) kinetická energie: Ek = = x mv ekonomika:
Funkce dvou a více proměnných. Motivace V praxi nevstačíme s funkcemi jedné proměnné, většina veličin závisí více než na jedné okolnosti, např.: obsah obdélníka: S( ) kinetická energie: Ek = = x mv ekonomika:
1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH
 1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH V minulém semestru jsme studovali vlastnosti unkcí jedné nezávislé proměnné. K popisu mnoha reálných situací obvkle s jednou proměnnou nevstačíme. FUNKCE DVOU
1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH V minulém semestru jsme studovali vlastnosti unkcí jedné nezávislé proměnné. K popisu mnoha reálných situací obvkle s jednou proměnnou nevstačíme. FUNKCE DVOU
PRAVDĚPODOBNOST A STATISTIKA. Testování hypotéz o rozdělení
 PRAVDĚPODOBNOST A STATISTIKA Testování hypotéz o rozdělení Testování hypotéz o rozdělení Nechť X e náhodná proměnná, která má distribuční funkci F(x, ϑ). Předpokládeme, že neznáme tvar distribuční funkce
PRAVDĚPODOBNOST A STATISTIKA Testování hypotéz o rozdělení Testování hypotéz o rozdělení Nechť X e náhodná proměnná, která má distribuční funkci F(x, ϑ). Předpokládeme, že neznáme tvar distribuční funkce
b) Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0
 Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0") Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Akustooptický modulátor s postupnou a stojatou akustickou vlnou
 Úloha č. 8 pro laserová praktika (ZPLT) KFE, FJFI, ČVUT, Praha v. 2017/2018 Akustooptický modulátor s postupnou a stojatou akustickou vlnou Akustooptické modulátory (AOM), někdy též nazývané Braggovské
Úloha č. 8 pro laserová praktika (ZPLT) KFE, FJFI, ČVUT, Praha v. 2017/2018 Akustooptický modulátor s postupnou a stojatou akustickou vlnou Akustooptické modulátory (AOM), někdy též nazývané Braggovské
Charakteristiky optického záření
 Fyzika III - Optika Charakteristiky optického záření / 1 Charakteristiky optického záření 1. Spektrální charakteristika vychází se z rovinné harmonické vlny jako elementu elektromagnetického pole : primární
Fyzika III - Optika Charakteristiky optického záření / 1 Charakteristiky optického záření 1. Spektrální charakteristika vychází se z rovinné harmonické vlny jako elementu elektromagnetického pole : primární
Zpracování astronomických snímků (Část: Objekty sluneční soustavy) Obsah: I. Vliv atmosféry na pozorovaný obraz II. Základy pořizování snímků planet
 Obsah: I. Vliv atmosféry na pozorovaný obraz II. Základy pořizování snímků planet") Zpracování astronomických snímků (Část: Objekty sluneční soustavy) Obsah: I. Vliv atmosféry na pozorovaný obraz II. Základy pořizování snímků planet Zdeněk ŘEHOŘ III. Zpracování snímků planet IV. Příklady
Zpracování astronomických snímků (Část: Objekty sluneční soustavy) Obsah: I. Vliv atmosféry na pozorovaný obraz II. Základy pořizování snímků planet Zdeněk ŘEHOŘ III. Zpracování snímků planet IV. Příklady
Postupné, rovinné, monochromatické vlny v lineárním izotropním nemagnetickém prostředí
 Postupné, rovinné, monochromatické vlny v lineárním izotropním nemagnetickém prostředí Rovinné vlny 1 Při diskusi o řadě jevů je výhodné vycházet z rovinných vln. Vlny musí splňovat Maxwellovy rovnice
Postupné, rovinné, monochromatické vlny v lineárním izotropním nemagnetickém prostředí Rovinné vlny 1 Při diskusi o řadě jevů je výhodné vycházet z rovinných vln. Vlny musí splňovat Maxwellovy rovnice
CT-prostorové rozlišení a citlivost z
 CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
VY_32_INOVACE_FY.12 OPTIKA II
 VY_32_INOVACE_FY.12 OPTIKA II Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Optická čočka je optická soustava dvou centrovaných
VY_32_INOVACE_FY.12 OPTIKA II Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Optická čočka je optická soustava dvou centrovaných
Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti.
 U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
Geometrické transformace obrazu
 Geometrické transformace obrazu a související témata 9. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 Téma přednášk O čem bude tato přednáška? Geometrické transformace obrazu Interpolace v
Geometrické transformace obrazu a související témata 9. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 Téma přednášk O čem bude tato přednáška? Geometrické transformace obrazu Interpolace v
Praktikum školních pokusů 2
 Praktikum školních pokusů 2 Optika 3A Interference a difrakce světla Jana Jurmanová Přírodovědecká fakulta Masarykovy univerzity, Brno I Interference na dvojštěrbině Odvod te vztah pro polohu interferenčních
Praktikum školních pokusů 2 Optika 3A Interference a difrakce světla Jana Jurmanová Přírodovědecká fakulta Masarykovy univerzity, Brno I Interference na dvojštěrbině Odvod te vztah pro polohu interferenčních
13. cvičení z Matematické analýzy 2
 . cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
. cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
VLNOVÁ OPTIKA. Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník
 VLNOVÁ OPTIKA Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník Vlnová optika Světlo lze chápat také jako elektromagnetické vlnění. Průkopníkem této teorie byl Christian Huyghens. Některé jevy se dají
VLNOVÁ OPTIKA Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník Vlnová optika Světlo lze chápat také jako elektromagnetické vlnění. Průkopníkem této teorie byl Christian Huyghens. Některé jevy se dají
Jaký význam má kritický kmitočet vedení? - nejnižší kmitočet vlny, při kterém se vlna začíná šířit vedením.
 Jaký význam má kritický kmitočet vedení? - nejnižší kmitočet vlny, při kterém se vlna začíná šířit vedením. Na čem závisí účinnost vedení? účinnost vedení závisí na činiteli útlumu β a na činiteli odrazu
Jaký význam má kritický kmitočet vedení? - nejnižší kmitočet vlny, při kterém se vlna začíná šířit vedením. Na čem závisí účinnost vedení? účinnost vedení závisí na činiteli útlumu β a na činiteli odrazu
Geometrické transformace obrazu a související témata. 9. přednáška předmětu Zpracování obrazů
 Geometrické transformace obrazu a související témata 9. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 Téma přednášk O čem bude tato přednáška? Geometrické transformace obrazu Interpolace v
Geometrické transformace obrazu a související témata 9. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 Téma přednášk O čem bude tato přednáška? Geometrické transformace obrazu Interpolace v
GEOMETRICKÁ OPTIKA. Znáš pojmy A. 1. Znázorni chod význačných paprsků pro spojku. Čočku popiš a uveď pro ni znaménkovou konvenci.
 Znáš pojmy A. Znázorni chod význačných paprsků pro spojku. Čočku popiš a uveď pro ni znaménkovou konvenci. Tenká spojka při zobrazování stačí k popisu zavést pouze ohniskovou vzdálenost a její střed. Znaménková
Znáš pojmy A. Znázorni chod význačných paprsků pro spojku. Čočku popiš a uveď pro ni znaménkovou konvenci. Tenká spojka při zobrazování stačí k popisu zavést pouze ohniskovou vzdálenost a její střed. Znaménková
Vzorová písemka č. 1 (rok 2015/2016) - řešení
 - řešení") Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
ODRAZ A LOM SVĚTLA. Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika
 ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
5.2.12 Dalekohledy. y τ τ F 1 F 2. f 2. f 1. Předpoklady: 5211
 5.2.12 Dalekohledy Předpoklady: 5211 Pedagogická poznámka: Pokud necháte studenty oba čočkové dalekohledy sestavit v lavicích nepodaří se Vám hodinu stihnout za 45 minut. Dalekohledy: už z názvu poznáme,
5.2.12 Dalekohledy Předpoklady: 5211 Pedagogická poznámka: Pokud necháte studenty oba čočkové dalekohledy sestavit v lavicích nepodaří se Vám hodinu stihnout za 45 minut. Dalekohledy: už z názvu poznáme,
2. DVOJROZMĚRNÝ (DVOJNÝ) INTEGRÁL
 INTEGRÁL") . VOJROZMĚRNÝ (VOJNÝ) INTEGRÁL Úvodem připomenutí základních integračních vzorců, bez nichž se neobejdete: [.] d = C [.] d = + C n+ n [.] d = + C n + [4.] d = ln + C [5.] sin d = cos + C [6.] cos d = sin
. VOJROZMĚRNÝ (VOJNÝ) INTEGRÁL Úvodem připomenutí základních integračních vzorců, bez nichž se neobejdete: [.] d = C [.] d = + C n+ n [.] d = + C n + [4.] d = ln + C [5.] sin d = cos + C [6.] cos d = sin
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
Modelování blízkého pole soustavy dipólů
 1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
1 Měření paralelní kompenzace v zapojení do trojúhelníku a do hvězdy pro symetrické a nesymetrické zátěže
 1 Měření paralelní kompenzace v zapoení do troúhelníku a do hvězdy pro symetrické a nesymetrické zátěže íle úlohy: Trofázová paralelní kompenzace e v praxi honě využívaná. Úloha studenty seznámí s vlivem
1 Měření paralelní kompenzace v zapoení do troúhelníku a do hvězdy pro symetrické a nesymetrické zátěže íle úlohy: Trofázová paralelní kompenzace e v praxi honě využívaná. Úloha studenty seznámí s vlivem
Experimentální realizace Buquoyovy úlohy
 Experimentální realizace Buquoyovy úlohy ČENĚK KODEJŠKA, JAN ŘÍHA Přírodovědecká fakulta Univerzity Palackého, Olomouc Abstrakt Tato práce se zabývá experimentální realizací Buquoyovy úlohy. Jedná se o
Experimentální realizace Buquoyovy úlohy ČENĚK KODEJŠKA, JAN ŘÍHA Přírodovědecká fakulta Univerzity Palackého, Olomouc Abstrakt Tato práce se zabývá experimentální realizací Buquoyovy úlohy. Jedná se o
REALIZACE BAREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚ-FREKVENČNÍ OBLASTI SPEKTRA
 REALIZACE AREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚFREKVENČNÍ OLASTI SPEKTRA. Úvod Antonín Mikš Jiří Novák Fakulta stavební ČVUT katedra fyziky Thákurova 7 66 9 Praha 6 V technické praxi se často vyskytuje
REALIZACE AREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚFREKVENČNÍ OLASTI SPEKTRA. Úvod Antonín Mikš Jiří Novák Fakulta stavební ČVUT katedra fyziky Thákurova 7 66 9 Praha 6 V technické praxi se často vyskytuje
M I K R O S K O P I E
 Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Fourierovské metody v teorii difrakce a ve strukturní analýze
 Osnova přednášky na 31 kolokviu Krystalografické společnosti Výpočetní metody v rtg a neutronové strukturní analýze Nové Hrady, 16 20 6 2003 Fourierovské metody v teorii difrakce a ve strukturní analýze
Osnova přednášky na 31 kolokviu Krystalografické společnosti Výpočetní metody v rtg a neutronové strukturní analýze Nové Hrady, 16 20 6 2003 Fourierovské metody v teorii difrakce a ve strukturní analýze
Jednoduchý elektrický obvod
 21 25. 05. 22 01. 06. 23 22. 06. 24 04. 06. 25 28. 02. 26 02. 03. 27 13. 03. 28 16. 03. VI. A Jednoduchý elektrický obvod Jednoduchý elektrický obvod Prezentace zaměřená na jednoduchý elektrický obvod
21 25. 05. 22 01. 06. 23 22. 06. 24 04. 06. 25 28. 02. 26 02. 03. 27 13. 03. 28 16. 03. VI. A Jednoduchý elektrický obvod Jednoduchý elektrický obvod Prezentace zaměřená na jednoduchý elektrický obvod
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Lingebraické kapitolky - Analytická geometrie
 Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
ZOBRAZOVÁNÍ ČOČKAMI. Mgr. Jan Ptáčník - GJVJ - Fyzika - Septima - Optika
 ZOBRAZOVÁNÍ ČOČKAMI Mgr. Jan Ptáčník - GJVJ - Fyzika - Septima - Optika Čočky Zobrazování čočkami je založeno na lomu světla Obvykle budeme předpokládat, že čočka je vyrobena ze skla o indexu lomu n 2
ZOBRAZOVÁNÍ ČOČKAMI Mgr. Jan Ptáčník - GJVJ - Fyzika - Septima - Optika Čočky Zobrazování čočkami je založeno na lomu světla Obvykle budeme předpokládat, že čočka je vyrobena ze skla o indexu lomu n 2
Zadání. Pracovní úkol. Pomůcky
 Pracovní úkol Zadání 1. Najděte směr snadného průchodu polarizátoru užívaného v aparatuře. 2. Ověřte, že zdroj světla je polarizován kolmo k vodorovné rovině. 3. Na přiložených vzorcích proměřte závislost
Pracovní úkol Zadání 1. Najděte směr snadného průchodu polarizátoru užívaného v aparatuře. 2. Ověřte, že zdroj světla je polarizován kolmo k vodorovné rovině. 3. Na přiložených vzorcích proměřte závislost
Akustooptický modulátor s postupnou a stojatou akustickou vlnou
 Úloha č. 8 pro laserová praktika KFE, FJFI, ČVUT v Praze, verze 2010/1 Akustooptický modulátor s postupnou a stojatou akustickou vlnou Akustooptické modulátory (AOM), někdy též nazývané Braggovské cely,
Úloha č. 8 pro laserová praktika KFE, FJFI, ČVUT v Praze, verze 2010/1 Akustooptický modulátor s postupnou a stojatou akustickou vlnou Akustooptické modulátory (AOM), někdy též nazývané Braggovské cely,
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
ČOČKY JAKO ZOBRAZOVACÍ SOUSTAVY aneb O spojkách a rozptylkách. PaedDr. Jozef Beňuška jbenuska@nextra.sk
 ČOČKY JAKO ZOBRAZOVACÍ SOUSTAVY aneb O spojkách a rozptlkách PaedDr. Jozef Beňuška jbenuska@nextra.sk Optická soustava - je soustava optických prostředí a jejich rozhraní, která mění směr chodu světelných
ČOČKY JAKO ZOBRAZOVACÍ SOUSTAVY aneb O spojkách a rozptlkách PaedDr. Jozef Beňuška jbenuska@nextra.sk Optická soustava - je soustava optických prostředí a jejich rozhraní, která mění směr chodu světelných
Fyzika II. Marek Procházka Vlnová optika II
 Fyzika II Marek Procházka Vlnová optika II Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení složek vlnění s různou
Fyzika II Marek Procházka Vlnová optika II Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení složek vlnění s různou
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Měření a analýza mechanických vlastností materiálů a konstrukcí. 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály
 FP 1 Měření a analýza mechanických vlastností materiálů a konstrukcí Úkoly : 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály 2. Určete moduly pružnosti vzorků nepřímo pomocí měření rychlosti
FP 1 Měření a analýza mechanických vlastností materiálů a konstrukcí Úkoly : 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály 2. Určete moduly pružnosti vzorků nepřímo pomocí měření rychlosti
Tvorba výpočtového modelu MKP
 Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
Bodový zdroj světla A vytvoří svazek rozbíhajících se paprsků, které necháme projít optickou soustavou.
 Optické zobrazení Optické zobrazení je proces, kterým optické soustavy vytvářejí obrazy reálných předmětů. Tyto soustavy mění chod světelných paprsků. Obsahují zrcadla, čočky, odrazné hranoly aj. Princip
Optické zobrazení Optické zobrazení je proces, kterým optické soustavy vytvářejí obrazy reálných předmětů. Tyto soustavy mění chod světelných paprsků. Obsahují zrcadla, čočky, odrazné hranoly aj. Princip
Měření příčného profilu gaussovského svazku metodou ostré hrany
 v. 2013/2014-2 Měření příčného profilu gaussovského svazku metodou ostré hrany 1. Teoretický základ 1.1 Gaussovský svazek a jeho šíření Gaussovský svazek je základním řešením rozložení elektromagnetického
v. 2013/2014-2 Měření příčného profilu gaussovského svazku metodou ostré hrany 1. Teoretický základ 1.1 Gaussovský svazek a jeho šíření Gaussovský svazek je základním řešením rozložení elektromagnetického
FYZIKA II. Marek Procházka 1. Přednáška
 FYZIKA II Marek Procházka 1. Přednáška Historie Dělení optiky Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení
FYZIKA II Marek Procházka 1. Přednáška Historie Dělení optiky Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení