Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2)
|
|
|
- Hana Kopecká
- před 8 lety
- Počet zobrazení:
Transkript
1 Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná soustava je zařízení, na kterém se provádí regulace. Abychom mohli zvolit vhodný regulátor, musíme znát dynamické vlastnosti soustavy. Ty získáme nejlépe z přechodové charakteristiky soustavy. Při jejím vyšetřování je třeba si uvědomit, že výstupní veličinou ze soustavy je regulovaná veličina (x) a vstupními veličinami jsou veličina akční (y) a poruchová (z). Obě vstupní veličiny mají vliv na časový průběh veličiny regulované. U poruchové veličiny je však její časový průběh neznámy a její vliv má být odstraněn automatickou regulací. Na ovlivnění časového průběhu regulované veličiny stačí jeden vstupní signál, používá se na získání odezvy regulované soustavy skokové změny akční veličiny. Provádí se to tak, že ručním řízením provedeme změnu akční veličiny a sledujeme odezvu soustavy. Blokové schéma regulované soustavy Další, důležitou vlastnosti soustavy je jejich schopnost hromadit látku nebo energií. Říkáme, že soustavy mají kapacitu. Nejčastěji se soustavy rozdělují podle průběhu odezvy na skokovou změnu do dvou skupin, a to do soustavy statické a astatické STATICKÉ REGULOVANÉ SOUSTAVY U statické regulované soustavy se po skokové změně akční veličiny regulovaná soustava ustálí na nové hodnotě. Tuto vlastnost statických soustav nazýváme autoregulací. Novou hodnotu regulované veličiny, na které se ustálí ideální statická regulovaná soustava, vypočítáme ze vztahu x = Ks y kde Ks je součinitel přenosu soustavy 1
 a vstupními veličinami jsou veličina akční (y) a poruchová (z).")
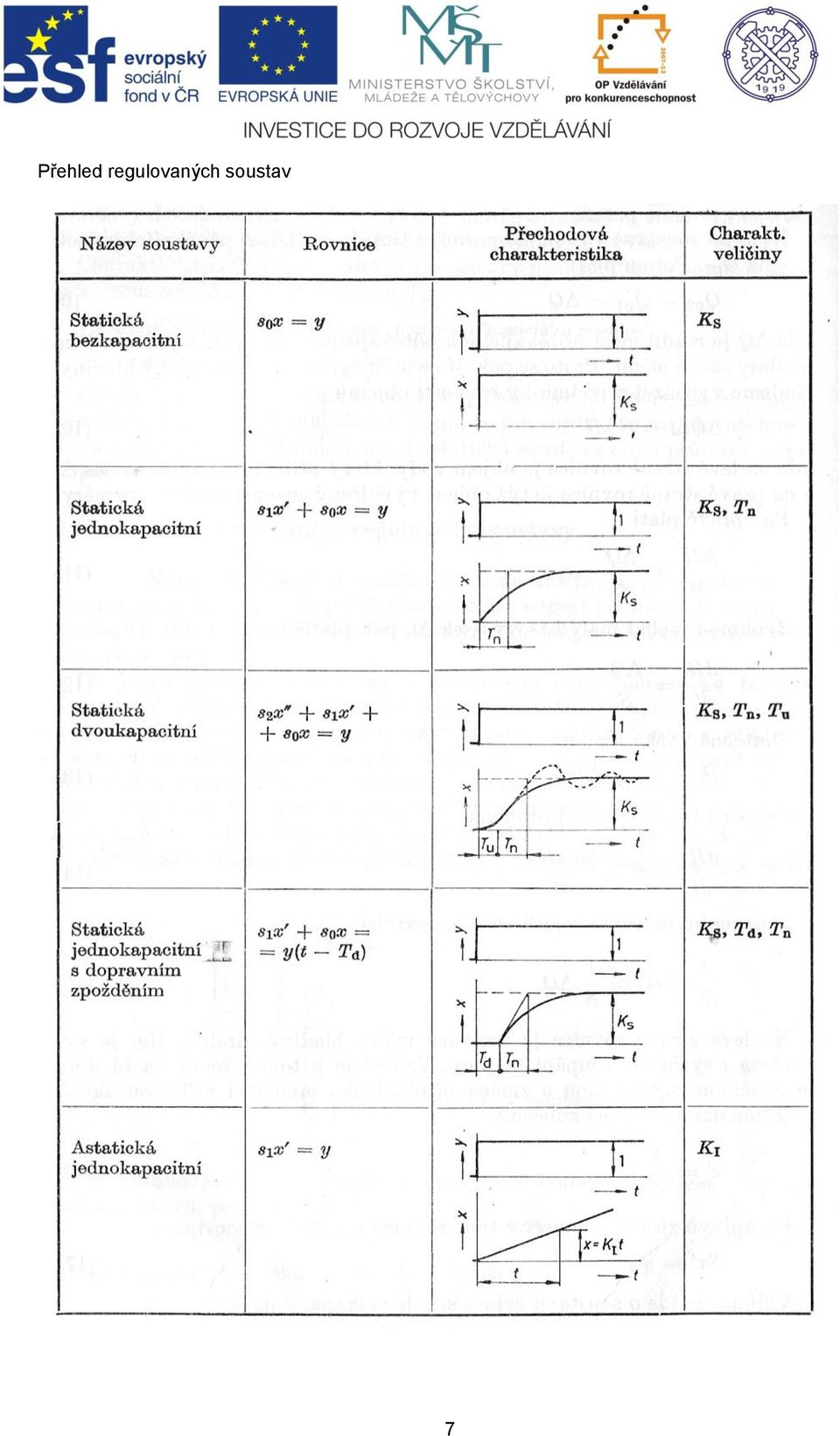
2 Přechodová charakteristika soustav statických Statické soustavy můžeme rozdělit podle počtu kapacit: a) na regulované soustavy bezkapacitní b) na regulované soustavy jednokapacitní c) na regulované soustavy dvoukapacitní d) na regulované soustavy několikakapacitní e) na regulované soustavy s dopravním zpožděním a) Regulované soustavy bezkapacitní Tato soustava má zanedbatelnou kapacitu, tedy nemá schopnost hromadit energií nebo látku. Působí pouze proti průtoku energie vlastním odporem. Z toho vyplývá, že regulovaná veličina sleduje téměř bez zpoždění veličinu akční. x = Ks y Příkladem takové soustavy může být krátký úsek potrubí, jimiž protéká kapalina nebo jiná nestlačitelná látka. U této soustavy se tlak (nebo i průtok) mění se změnou polohy regulačního ventilu téměř bez zpoždění. Tyto regulované soustavy se vyskytují jen zřídka. Statická bezkapacitní soustava; a) příklad soustavy, b) přechodová charakteristika 2

3 b) Regulované soustavy jednokapacitní Tyto soustavy se vyznačuji tím, že mají jednu kapacitu, která umožňuje hromadit energii nebo látku. Regulovaná veličina se u těchto soustav při skokové změně akční veličiny mění ihned s určitou počáteční rychlostí, úměrnou rozdílu mezi okamžitou a konečnou hodnotou regulované veličiny. Tato rychlost se stále zmenšuje, až po delším čase se regulovaná soustava ustálí na nové (konečné) hodnotě. x= Ks y Doba náběhu Tn je doba, za kterou by výstupní veličina dosáhla nové rovnovážné polohy, kdyby změna probíhala největší rychlosti. (Rychlost má směr tečny ke křivce.) Jednokapacitní statická soustava; a) příklad soustavy, b) přechodová charakteristika Jako příklad můžeme uvést nádrž, která se plní vzduchem přes regulační ventil. c) Regulované soustavy dvoukapacitní Mají dvě kapacity zařazené za sebou. Přechodová charakteristika této soustavy má mimo charakteristickou veličinu Ks ještě dvě časové konstanty a to dobu náběhů Tn a dobu průtahu Tu. Doba průtahu Tu je časový úsek mezi počátkem změny a bodem, v němž protíná přímku počátečního rovnovážného stavu tečna charakteristiky. Součet doby průtahu a náběhu se nazývá doba přechodu Tp. Tp= Tu + Tn 3

4 Dvoukapacitní statická soustava; a)příklad soustavy, b) přechodová charakteristika Jako příklad lze uvést sériové zapojení dvou nádrží s regulačním ventilem, plněných vzduchem. V praxi se setkáváme se soustavami tohoto typu velmi často, především u tepelných soustav. d) Regulované soustavy několikakapacitní Tyto soustavy vznikají sériovým zapojením členů jednokapacitních (prvního řádu). Přechodové charakteristiky těchto soustav mají obdobný tvar jako přechodová charakteristika soustavy dvoukapacitní. Mají i stejné veličiny Ks, Tu, Tn. U těchto soustav mohou být i členy druhého řádu- (setrvačnost hmotnosti, indukčnost). f) Regulované soustavy s dopravním zpožděním U regulované soustavy s dopravním zpožděním se po skokové změně akční veličiny změní i regulovaná veličina, ale s určitým zpožděním, které nazýváme dopravní zpoždění Td. Dopravní zpoždění je doba, která uplyne mezi změnou akční veličiny a změnou regulované veličiny. Jednokapacitní soustava s dopravním zpožděním; a)příklad soustavy, b) přechodová charakteristika 4

5 Jako příklad je na obrázku regulovaná soustava jednokapacitní s dopravním zpožděním, která je tvořena nádrží, do které se přivádí vzduch přes regulační ventil, jehož poloha je značně vzdálená od regulované soustavy ASTATICKÉ REGULOVANÉ SOUSTAVY Jsou takové soustavy, u kterých po změně akční veličiny přibývá nebo ubývá regulované veličiny trvale. Po poruše rovnováhy nenastane samovolné ustájení na nové hodnotě, jak tomu bylo u soustav statických, ale odchylka od původního rovnovážného stavu se neustále zvětšuje. Tyto soustavy nemají autoregulaci. Z toho vyplývá, že následky vzniklé poruchou lze odstranit pouze pomocí regulátoru. Obdobně jako soustavy statické, tak i soustavy astatické můžeme rozdělit podle počtu kapacit s tou výjimkou, že neexistuje soustava astatická bezkapacitní. Rozdělení: a) Regulovaná soustava astatická jednokapacitní Nejznámějším příkladem je nádrž s nuceným přítokem a odtokem, který obstarávají čerpadla. Regulovanou veličinou je výška hladiny, akční veličinou je výkon vtokového čerpadla č. 1. Je-li výkon vtokového čerpadla č.1, shodný s výkonem čerpadla č. 2 na odtoku, rovnají se i přitékající a odtékající průtoky kapalin. Q1 = Q2, výška hladiny se nemění na soustavě je rovnovážný stav, avšak hladina může mít při tom libovolnou výšku. Změní-li se výkon čerpadla č.1 na vtoku, změní se i přitékající průtok Q1 mění se i výška hladiny úměrně s časem. Mezi akční veličinou y, regulovanou veličinou x a časem t platí vztah x = Ki y t kde Ki je součinitel přenosu astatické soustavy a zároveň její charakteristickou veličinou. Rychlost, změny regulované veličiny je potom vx = t x = Ki y Součinitel přenosu astatické soustavy Ki můžeme definovat jako rychlost změny regulované veličiny při jednotkovém skoku akční veličiny vx = t x = Ki (y = 1) Jednokapacitní astatická soustava; a) příklad soustavy (Q 2 = konst.), b) přechodová charakteristika 5

6 b) Regulovaná soustava astatická dvoukapacitní Příkladem mohou být dvě nádrže zařazené za sebou s nuceným přítokem a odtokem, který obstarávají čerpadla. Charakteristickými veličinami jsou součinitel přenosu astatické soustavy Ki a doba průtahu Tu Závěrem lze říci, že regulace astatických soustav je všeobecně obtížnější než soustav statických, vzhledem k tomu, že jit chybí samoregulovatelnost. Tyto vlastnosti se ještě zhorší, má-li astatická soustava dobu průtahů nebo dopravní zpoždění. Dvoukapacitní astatická soustava; a) příklad soustavy (Q 2 = konst.), b) přechodová charakteristika 6

7 Přehled regulovaných soustav 7
8 Kontrolní otázky a úlohy: 1) Co je regulovaná soustava? 2) Popiš, jak pracuje statická soustava. 3) Popiš, jak pracuje astatická soustava. 4) Vysvětli pojem kapacita soustavy. 5.6 NESPOJITÉ REGULÁTORY Nespojitý regulátor je regulátor, jehož výstupní signál nezávisí spojitě na vstupním signálu. Vyznačuje se tím, že akční veličina se nemění spojitě, nýbrž může nabývat pouze omezeného počtu hodnot. To znamená, že regulační orgán u nespojitých regulátorů může zaujmout dvě nebo více pevných poloh, přičemž jeho pohyb mezi pevnými polohami probíhá skokem. Nespojité regulátory patří mezi nejrozšířenější regulátory hlavně pro svoji jednoduchou konstrukci Dvoupolohový regulátor Jedná se o nejjednodušší regulátor. Při poklesu regulované veličiny pod žádanou hodnotu nabývá akční veličina určitou pevnou hodnotu a při překročení žádané hodnoty dosáhne jiné pevné hodnoty, zpravidla nulové. S činností regulátoru se seznámíme u regulátoru tlaku. Regulovaná veličina (tlak) se snímá pomocí membrány a porovnává se s veličinou žádanou, kterou si můžeme nastavit pomocí stavěcího šroubku. Je-li regulovaný tlak nižší než tlak nastavený, jsou spínací kontakty spojeny a naopak, je-li regulovaný tlak vyšší než žádaný, kontakty se rozpojí. Tímto způsobem lze regulovat tlak dodávaný kompresorem, který je prostřednictvím regulátoru střídavě zapínán a vypínán. 8

9 Dvoupolohový regulátor tlaku; 1 - membrána, 2 kontakt, 3 stavěcí šroubek pro nastavení žádané hodnoty, 4 železná destička, 5 - magnet Vlastnosti dvoupolohového regulátoru můžeme vyjádřit pomocí jeho statické charakteristiky. U regulátorů pracujícího s hysterezí je třeba mít na paměti, že hodnoty regulované veličiny xd a xh při kterých dochází k zapnutí či rozpojení kontaktů, se neshodují s žádanou hodnotou x w.. K této skutečnosti musíme přihlížet při nastavování regulátoru. Charakteristika dvoupolohového regulátoru, a) s nulovou hysterezí, b) s hysterézi h Třípolohový regulátor U dvoupolohového regulátoru jsou pouze dvě polohy akční veličina má hodnotu 0% nebo 100%. Jelikož u třípolohového regulátoru můžeme mít tří pevné polohy, je tedy výhodnější. Vlastnosti můžeme vyjádřit pomocí jeho statické charakteristiky. Charakteristika třípolohového regulátoru; a) s nulovou hysterezí, b) s hysterezí h Popis činnosti třípolohového regulátoru tlaku bez hystereze. Je-li skutečná hodnota regulované veličiny menší než žádaná hodnota x w1, dosahuje akční veličina své maximální hodnoty y max1. Zvětšíli se skutečná hodnota regulované veličiny mezi x w1 a x w2, potom akční veličina dosahuje menší hodnoty označené y max2. Je-li skutečná hodnota regulované veličiny větší než nastavená hodnota x w2, je hodnota akční veličiny nulová. Žádané hodnoty x w1 a x w2 se nastavují maticemi M1 a M2 na obrázku níže. 9
 s nulovou hysterezí, b) s hysterézi h 5.6.")
10 Třípolohový regulátor tlaku Kontrolní otázky a úlohy: 1) Co znamená pojem hystereze u nespojitých regulátoru. 2) Popiš funkci nespojitého dvoupolohového regulátoru. 3) Popiš funkci nespojitého třípolohového regulátoru. 5.7 SPOJITÉ REGULÁTORY Spojitý regulátor je regulátor, u něhož výstupní veličina je spojitou funkcí vstupní veličiny. Z toho vyplývá, že regulovaná veličina neustále ovlivňuje akční veličinu, která může nabývat libovolné hodnoty od y = 0 až y = max Proporcionální regulátor (P) Vlastnosti regulátoru můžeme volit a tím můžeme volit i závislost výstupní veličiny na veličině vstupní. Nejjednodušší vztah mezi výstupní a vstupní veličinou je přímá úměrnost. Každé hodnotě vstupní veličiny odpovídá tedy přímo úměrná hodnota veličiny výstupní. y = -K R x -K R je součinitel přenosu regulátoru U regulátoru (na rozdíl od regulované soustavy) máme možnost součinitel přenosu měnit (můžeme jej nastavovat). Záporné znaménko v rovnici regulátoru znamená, že regulátor pracuje s inverzí. To znamená, že při kladné regulační odchylce x se akční veličina zmenší o y a naopak. a) Statická charakteristika Regulátor reguluje tím citlivěji a přesněji, čím je jeho součinitel přenosu větší. Stabilita regulátoru a tím i stabilita regulačního pochodu je větší při malém součiniteli přenosu. Proto správné nastavení součinitele přenosu regulátoru je vždy kompromisem mezi těmito dvěma hledisky. Statická charakteristika regulátoru P 10
 Vlastnosti regulátoru můžeme volit a tím můžeme volit i závislost výstupní veličiny na veličině vstupní.")
11 U proporcionálního regulátoru se jako charakteristická veličina místo uvedeného součinitele přenosu regulátoru používá častěji tzv. pásmo proporcionality pp. Je to rozsah, ve kterém se musí změnit regulovaná veličina, aby se regulační orgán (akční člen) přestavil z jedné polohy do druhé, udává se v %. 1 pp =. 100 /%/ KR Pásmo proporcionality regulátoru P b) Přechodová charakteristika proporcionálního regulátoru Přechodová charakteristika regulátoru P Z obrázku je patrné, že při skokové změně vstupní veličiny se ustálí výstupní veličina velmi rychle, téměř okamžitě na nové hodnotě, jejíž velikost můžeme ovlivnit nastavením pásma proporcionality. Regulátor je stabilní. c) Vlastnosti proporcionálního regulátoru. Je velmi jednoduchý, levný a stabilní. Nevýhoda je, že pracuje s trvalou regulační odchylkou, kterou nelze odstranit, lze ji pouze ovlivnit volbou pásma proporcionality. Rozšiřuje-li se pásmo proporcionality, zvětšuje se i trvalá regulační odchylka a naopak zužuje-li se pásmo proporcionality, trvalá regulační odchylka se zmenšuje, ale tím se zmenšuje i stabilita regulátoru. 11

12 5.7.2 Integrační regulátor (I) Tento regulátor má pracovat bez trvalé regulační odchylky, musí tedy každé hodnotě vstupní veličiny odpovídat určitá změna rychlostí výstupní veličiny. KR y = - Ti x dt Ti je časová integrační konstanta a) Statická charakteristika integračního regulátoru. Jedinou charakteristickou veličinou, kterou můžeme ovlivňovat vlastnosti integračního regulátoru, je časová konstanta integrační Ti. Součinitel přenosu je konstantní nelze je měnit. Integrační regulátor reguluje tím citlivěji a přesněji, čím je jeho časová integrační konstanta menší, zatímco jeho stabilita se naopak zmenšuje. Statická charakteristika regulátoru I b) Přechodová charakteristika integračního regulátoru Změní-li se vstupní veličina skokem (x = 1), pak KR KR y = - Ti dt y = - t Ti Charakteristickou veličinou integračního regulátoru je časová konstanta integrační Ti. Je to doba, za kterou výstupní veličina dosáhne stejné hodnoty, jaké by dosáhla, kdyby přenos regulátoru byl proporcionální a pásmo proporcionality bylo 100% a) b) a) Přechodová charakteristika regulátoru I b) Grafické vyjádření integrační časové konstanty 12

13 c) Vlastnosti integračního regulátoru. Je schopnost regulačního orgánu ustálit se na žádané hodnotě v libovolné poloze. Pracuje bez trvalé regulační odchylky. V zhledem k jeho astatičnosti (nestabilitě) není vhodný pro regulaci astatických soustav Derivační regulátor (D) U tohoto regulátoru změna rychlosti vstupní veličiny odpovídá přímo úměrná hodnota výstupní veličiny. y = - T d K R x Td je časová konstanta derivační a) Statická charakteristika derivačního regulátoru. Charakteristickou veličinou regulátoru, kterou lze ovlivňovat jeho vlastnosti je časová konstanta derivační T d.součinitel přenosu regulátoru K R je pro daný typ regulátoru konstantní nelze je změnit. Derivační regulátor reguluje tím citlivěji a přesněji, čím je jeho časová konstanta T d větší. Stabilita regulátoru se naopak zmenšuje. Statická charakteristika regulátoru D b) Přechodová charakteristika derivačního regulátoru. T d je definována jako doba, za kterou výstupní veličina dosáhne stejné hodnoty, jaké by dosáhla, kdyby přenos regulátoru byl proporcionální a pásmo proporcionality bylo 100% Přechodová charakteristika regulátoru D c) Vlastnosti derivačního regulátoru. Používá se pro zrychlení regulačního pochodu. Vzhledem k tomu, že tento regulátor nereaguje na regulační odchylku, ale pouze na změnu rychlosti regulační odchylky, nelze jej samostatně použít. Používá se pouze ve spojení s předcházejícími typy regulátorů. 13
 Statická charakteristika derivačního regulátoru.")
14 Grafické vyjádření derivační časové konstanty Kontrolní otázky a úlohy: 1) Co je spojitý regulátor? 2) Popiš, jak pracuje proporcionální regulátor. 3) Popiš, jak pracuje integrační regulátor. 4) Popiš, jak pracuje derivační regulátor. Použita literatura a zdroje obrázků: MARŠÍK, Antonín KUBIČÍK, Miroslav. Automatizace, automatické řízení ve strojírenství. 1 vyd. Praha: SNTL,

Regulační obvody se spojitými regulátory
 Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Kvalita regulačního pochodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Regulace. Dvoustavová regulace
 Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Regulační obvody s nespojitými regulátory
 Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
Regulované soustavy Zhotoveno ve školním roce: 2011/2012
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
k DUM 09. pdf ze šablony 1_šablona_automatizační_technika_I 02 tematický okruh sady: regulovaná soustava
 METODICKÝ LIST k DUM 09. pdf ze šablony 1_šablona_automatizační_technika_I 02 tematický okruh sady: regulovaná soustava Téma DUM: regulovaná soustava test 1 Anotace: Digitální učební materiál DUM - slouží
METODICKÝ LIST k DUM 09. pdf ze šablony 1_šablona_automatizační_technika_I 02 tematický okruh sady: regulovaná soustava Téma DUM: regulovaná soustava test 1 Anotace: Digitální učební materiál DUM - slouží
REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu
 REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu Mechanizace je zavádění mechanizačních prostředků do lidské činnosti, při které tyto prostředky nahrazují člověka jako zdroj energie, ale ne jako zdroj
REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu Mechanizace je zavádění mechanizačních prostředků do lidské činnosti, při které tyto prostředky nahrazují člověka jako zdroj energie, ale ne jako zdroj
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
2. Základní teorie regulace / Regulace ve vytápění
 Regulace v technice prostředí (staveb) (2161087 + 2161109) 2. Základní teorie regulace / Regulace ve vytápění 9. 3. 2016 a 16. 3. 2016 Ing. Jindřich Boháč Regulace v technice prostředí Ing. Jindřich Boháč
Regulace v technice prostředí (staveb) (2161087 + 2161109) 2. Základní teorie regulace / Regulace ve vytápění 9. 3. 2016 a 16. 3. 2016 Ing. Jindřich Boháč Regulace v technice prostředí Ing. Jindřich Boháč
Nespojité (dvou- a třípolohové ) regulátory
 regulátory") Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor
 METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
DUM 02 téma: Spojitá regulace - výklad
 DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Nejjednodušší, tzv. bang-bang regulace
 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Bezpečnost chemických výrob N111001
 Bezpečnost chemických výrob N111001 Petr Zámostný místnost: A-72a tel.: 4222 e-mail: petr.zamostny@vscht.cz Základní pojmy z regulace a řízení procesů Účel regulace Základní pojmy Dynamické modely regulačních
Bezpečnost chemických výrob N111001 Petr Zámostný místnost: A-72a tel.: 4222 e-mail: petr.zamostny@vscht.cz Základní pojmy z regulace a řízení procesů Účel regulace Základní pojmy Dynamické modely regulačních
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
Automatické měření veličin
 Měření veličin a řízení procesů Automatické měření veličin» Čidla» termočlánky, tlakové senzory, automatické váhy, konduktometry» mají určitou dynamickou charakteristiku» Analyzátory» periodický odběr
Měření veličin a řízení procesů Automatické měření veličin» Čidla» termočlánky, tlakové senzory, automatické váhy, konduktometry» mají určitou dynamickou charakteristiku» Analyzátory» periodický odběr
Aut 2- prvky ovládacích soustav + regulační technika (1/3)
") Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 1. 3. 2.2013 Aut 2- prvky ovládacích soustav + regulační technika (1/3) 4. PRVKY OVLÁDACÍCH SOUSTAV 4.1 Základní
Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 1. 3. 2.2013 Aut 2- prvky ovládacích soustav + regulační technika (1/3) 4. PRVKY OVLÁDACÍCH SOUSTAV 4.1 Základní
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK
 Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
Práce s PID regulátorem regulace výšky hladiny v nádrži
 Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Obr. 1 Činnost omezovače amplitudy
 . Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
. Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
1. VÝBĚR ZÁKLADNÍCH POJMŮ
 1. VÝBĚR ZÁKLADNÍCH POJMŮ 1.1 Měřicí technika Kalibrace (starší název cejchování) je soubor úkonů, hledající za určených podmínek vztah mezi hodnotami udávanými měřicím přístrojem (nebo měřicí sestavou)
1. VÝBĚR ZÁKLADNÍCH POJMŮ 1.1 Měřicí technika Kalibrace (starší název cejchování) je soubor úkonů, hledající za určených podmínek vztah mezi hodnotami udávanými měřicím přístrojem (nebo měřicí sestavou)
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
PŘECHODOVÁ CHARAKTERISTIKA
 PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
ZÁKLADY AUTOMATIZACE TECHNOLOGICKÝCH PROCESŮ V TEORII
 VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Mechatronika ve strojírenství
 Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
HPS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECHODOVÉ CHARAKTERISTIKY
 Schéma PS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECODOVÉ CARAKTERISTIKY A1 K1L U1 K1R A2 PC K2L K2R B1 U2 B2 PjR PjR F C1 S1 h L S2 F C2 h R A/D, D/A PŘEVODNÍK A OVLÁDACÍ JEDNOTKA u R u L Obr. 1 Schéma úlohy
Schéma PS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECODOVÉ CARAKTERISTIKY A1 K1L U1 K1R A2 PC K2L K2R B1 U2 B2 PjR PjR F C1 S1 h L S2 F C2 h R A/D, D/A PŘEVODNÍK A OVLÁDACÍ JEDNOTKA u R u L Obr. 1 Schéma úlohy
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky. NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar
 UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
Témata profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika)
") ta profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika) 1. Cívky - vlastnosti a provedení, řešení elektronických stejnosměrných
ta profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika) 1. Cívky - vlastnosti a provedení, řešení elektronických stejnosměrných
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
DUM 11 téma: Dvoupolohová regulace PLC výklad
 DUM 11 téma: Dvoupolohová regulace PLC výklad ze sady: 3 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 3. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 11 téma: Dvoupolohová regulace PLC výklad ze sady: 3 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 3. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Regulátor ECL Comfort 110 Pro střídavé napětí 230 V a 24 V
 Datový list Regulátor ECL Comfort 110 Pro střídavé napětí 230 V a 24 V a zároveň je prostřednictvím čipové karty a komunikačního rozhraní uzpůsoben pro využití v nových aplikacích. Konstrukce regulátoru
Datový list Regulátor ECL Comfort 110 Pro střídavé napětí 230 V a 24 V a zároveň je prostřednictvím čipové karty a komunikačního rozhraní uzpůsoben pro využití v nových aplikacích. Konstrukce regulátoru
BASPELIN CPM EQ3. Popis obsluhy ekvitermního regulátoru CPM EQ3
 BASPELIN Popis obsluhy ekvitermního regulátoru duben 2001 Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy zejména do elektrického
BASPELIN Popis obsluhy ekvitermního regulátoru duben 2001 Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy zejména do elektrického
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
2. Regulované soustavy 2.1 Statické a astatické regulované soustavy Soustavy vyšších řádů
 2. Regulované soustavy Největší vliv na průběh regulačního děje mají přenosové vlastnosti regulovaných soustav a ústředních regulačních členů. Při návrhu regulace je třeba znát přenosové vlastnosti regulované
2. Regulované soustavy Největší vliv na průběh regulačního děje mají přenosové vlastnosti regulovaných soustav a ústředních regulačních členů. Při návrhu regulace je třeba znát přenosové vlastnosti regulované
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
SEKVENČNÍ LOGICKÉ OBVODY
 Sekvenční logický obvod je elektronický obvod složený z logických členů. Sekvenční obvod se skládá ze dvou částí kombinační a paměťové. Abychom mohli určit hodnotu výstupní proměnné, je potřeba u sekvenčních
Sekvenční logický obvod je elektronický obvod složený z logických členů. Sekvenční obvod se skládá ze dvou částí kombinační a paměťové. Abychom mohli určit hodnotu výstupní proměnné, je potřeba u sekvenčních
BASPELIN CPL. Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24
 BASPELIN CPL Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24 červenec 2007 EQ23 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné
BASPELIN CPL Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24 červenec 2007 EQ23 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Střední odborná škola a Střední odborné učiliště, Dubno Ing. Miroslav Krýdl Tematická oblast ELEKTRONIKA
 Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_03_Filtrace a stabilizace Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_03_Filtrace a stabilizace Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
Základní pojmy; algoritmizace úlohy Osnova kurzu
 Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
O /OFF a PID REGULACE Co je to O /OFF regulace?
 O /OFF a PID REGULACE Pro jednoduchost se budeme zabývat regulací na konstantní hodnotu žádaná hodnota se v čase nemění. Co je to O /OFF regulace? Je to základní typ regulace zapnuto / vypnuto, též dvoupolohová
O /OFF a PID REGULACE Pro jednoduchost se budeme zabývat regulací na konstantní hodnotu žádaná hodnota se v čase nemění. Co je to O /OFF regulace? Je to základní typ regulace zapnuto / vypnuto, též dvoupolohová
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
DeltaSol TECHNICKÁ DATA
 TECHNICKÁ DATA IP30/DIN40050 Provozní teplota: 0 až +40 C Rozměry: 150 x 102 x 52 mm Instalace: na stěnu, na izolaci nádrže Zobrazení: LCD Nastavení: T: 2...11 K (nastavitelná hodnota) hystereze: 1,0 K
TECHNICKÁ DATA IP30/DIN40050 Provozní teplota: 0 až +40 C Rozměry: 150 x 102 x 52 mm Instalace: na stěnu, na izolaci nádrže Zobrazení: LCD Nastavení: T: 2...11 K (nastavitelná hodnota) hystereze: 1,0 K
ρ = měrný odpor, ρ [Ω m] l = délka vodiče
![ρ = měrný odpor, ρ [Ω m] l = délka vodiče](/thumbs/28/12887427.jpg "ρ = měrný odpor, ρ [Ω m] l = délka vodiče") 7 Kapitola 2 Měření elektrických odporů 2 Úvod Ohmův zákon definuje ohmický odpor, zkráceně jen odpor, R elektrického vodiče jako konstantu úměrnosti mezi stejnosměrným proudem I, který protéká vodičem
7 Kapitola 2 Měření elektrických odporů 2 Úvod Ohmův zákon definuje ohmický odpor, zkráceně jen odpor, R elektrického vodiče jako konstantu úměrnosti mezi stejnosměrným proudem I, který protéká vodičem
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
4. Práce, výkon, energie a vrhy
 4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
CVIČENÍ 4 Doc.Ing.Kateřina Hyniová, CSc. Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze 4.
 CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
15 - Stavové metody. Michael Šebek Automatické řízení
 15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
BASPELIN CPM EQ21. Popis obsluhy ekvitermního regulátoru CPM EQ21
 BASPELIN CPM EQ21 Popis obsluhy ekvitermního regulátoru CPM EQ21 září 2002 EQ21 CPM Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy
BASPELIN CPM EQ21 Popis obsluhy ekvitermního regulátoru CPM EQ21 září 2002 EQ21 CPM Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy
Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1. Regulace teplovodních otopných soustav úvod, základní pojmy
 Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_20_OC_2.01 Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1 Autor Tématický celek Ing. Zdenka
Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_20_OC_2.01 Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1 Autor Tématický celek Ing. Zdenka
otopných soustav Co je to regulace? jeden soustavy teplota tlak ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TZ Kabele
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TB21- Regulace otopných soustav T21 2006-2007 Kabele Co je to regulace? ařízen zení,, na jehož impuls se měním jeden nebo více v provozních
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TB21- Regulace otopných soustav T21 2006-2007 Kabele Co je to regulace? ařízen zení,, na jehož impuls se měním jeden nebo více v provozních
STOČ 2007. Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA. Úvod
 Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA VŠB-TU OSTRAVA, FEI Miroslav Štefela, kat.455 Úvod Motivace práce Pro řízení procesů s využitím průmyslové sběrnice Profibus-PA
Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA VŠB-TU OSTRAVA, FEI Miroslav Štefela, kat.455 Úvod Motivace práce Pro řízení procesů s využitím průmyslové sběrnice Profibus-PA
některé fyzikální veličiny, jako např. napětí, proud, otáčky motoru, teplotu v místnosti, průtok vzduchu (klimatizace,
 Základy Systémové techniky budov 7 přednáška Základní požadavky regulačních zařízení, příklady z oblasti regulace vytápění Ing. Jan Vaňuš Ph.D. N 716 tel.: 59 699 1509 email: jan.vanus@vsb.cz vsb.cz http://sweb.cz/jan.vanus
Základy Systémové techniky budov 7 přednáška Základní požadavky regulačních zařízení, příklady z oblasti regulace vytápění Ing. Jan Vaňuš Ph.D. N 716 tel.: 59 699 1509 email: jan.vanus@vsb.cz vsb.cz http://sweb.cz/jan.vanus
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
ZÁKLADY ŘÍZENÍ ENERGETICKÝCH STROJŮ
 INOVACE ODBORNÉHO VZDĚLÁVÁNÍ NA STŘEDNÍCH ŠKOLÁCH ZAMĚŘENÉ NA VYUŽÍVÁNÍ ENERGETICKÝCH ZDROJŮ PRO 1. STOLETÍ A NA JEJICH DOPAD NA ŽIVOTNÍ PROSTŘEDÍ CZ.1.07/1.1.00/08.0010 ZÁKLADY ŘÍZENÍ ENERGETICKÝCH STROJŮ
INOVACE ODBORNÉHO VZDĚLÁVÁNÍ NA STŘEDNÍCH ŠKOLÁCH ZAMĚŘENÉ NA VYUŽÍVÁNÍ ENERGETICKÝCH ZDROJŮ PRO 1. STOLETÍ A NA JEJICH DOPAD NA ŽIVOTNÍ PROSTŘEDÍ CZ.1.07/1.1.00/08.0010 ZÁKLADY ŘÍZENÍ ENERGETICKÝCH STROJŮ
Operační zesilovač (dále OZ)
") http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH
 TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
TR T0 T1 T0 T1 REŽIM SP1 A B REGULÁTOR TEPLOTY REGULÁTOR TEPLOTY DRT23. verze 12. 3sSTISK
 Digitální regulátor teploty DRT20,23 NÁVOD PRO UŽIVATELE verze 12 -diferenční regulátor teploty jednoho tepelného spotřebiče SP1 3sSTISK (nastavení) TR T0 T1 T4 Tp REGULÁTOR TEPLOTY DRT23 verze 12 C REŽIM
Digitální regulátor teploty DRT20,23 NÁVOD PRO UŽIVATELE verze 12 -diferenční regulátor teploty jednoho tepelného spotřebiče SP1 3sSTISK (nastavení) TR T0 T1 T4 Tp REGULÁTOR TEPLOTY DRT23 verze 12 C REŽIM
Třecí ztráty při proudění v potrubí
 Třecí ztráty při proudění v potrubí Vodorovným ocelovým mírně zkorodovaným potrubím o vnitřním průměru 0 mm proudí 6 l s - kapaliny o teplotě C. Určete tlakovou ztrátu vlivem tření je-li délka potrubí
Třecí ztráty při proudění v potrubí Vodorovným ocelovým mírně zkorodovaným potrubím o vnitřním průměru 0 mm proudí 6 l s - kapaliny o teplotě C. Určete tlakovou ztrátu vlivem tření je-li délka potrubí
Prostředky automatického řízení
 VŠB-Technická Univerzita Ostrava SN2AUT01 Prostředky automatického řízení Návrh měřícího a řídicího řetězce Vypracoval: Pavel Matoška Zadání : Navrhněte měřicí řetězec pro vzdálené měření průtoku vzduchu
VŠB-Technická Univerzita Ostrava SN2AUT01 Prostředky automatického řízení Návrh měřícího a řídicího řetězce Vypracoval: Pavel Matoška Zadání : Navrhněte měřicí řetězec pro vzdálené měření průtoku vzduchu
Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Pozorovatel, Stavová zpětná vazba
 Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov. Regulace. Co je to regulace?
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Regulace 242 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné soustavy teplota hmotnostní
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Regulace 242 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné soustavy teplota hmotnostní
15. Elektrický proud v kovech, obvody stejnosměrného elektrického proudu
 15. Elektrický proud v kovech, obvody stejnosměrného elektrického proudu 1. Definice elektrického proudu 2. Jednoduchý elektrický obvod a) Ohmův zákon pro část elektrického obvodu b) Elektrický spotřebič
15. Elektrický proud v kovech, obvody stejnosměrného elektrického proudu 1. Definice elektrického proudu 2. Jednoduchý elektrický obvod a) Ohmův zákon pro část elektrického obvodu b) Elektrický spotřebič
Robustnost regulátorů PI a PID
 Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
A x A y. α = 30. B y. A x =... kn A y =... kn B y =... kn. Vykreslení N, V, M. q = 2kN/m M = 5kNm. F = 10 kn A c a b d ,5 2,5 L = 10
 Vzorový příklad k 1. kontrolnímu testu Prostý nosník Zadání: Vypočtěte složky reakcí a vykreslete průběhy vnitřních sil. A x A y y q = kn/m M = 5kNm F = 10 kn A c a b d 1 1 3,5,5 L = 10 α B B y x α = 30
Vzorový příklad k 1. kontrolnímu testu Prostý nosník Zadání: Vypočtěte složky reakcí a vykreslete průběhy vnitřních sil. A x A y y q = kn/m M = 5kNm F = 10 kn A c a b d 1 1 3,5,5 L = 10 α B B y x α = 30
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov EEB1 Vytápění Regulace a měřm ěření doc.ing.karel Kabele,CSc. Co je to regulace? Zařízen zení,, na jehož impuls se měním jeden nebo více
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov EEB1 Vytápění Regulace a měřm ěření doc.ing.karel Kabele,CSc. Co je to regulace? Zařízen zení,, na jehož impuls se měním jeden nebo více
Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu
 1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
LC oscilátory s transformátorovou vazbou
 1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
BIOMECHANIKA. Studijní program, obor: Tělesná výchovy a sport Vyučující: PhDr. Martin Škopek, Ph.D.
 BIOMECHANIKA 8, Disipativní síly II. (Hydrostatický tlak, hydrostatický vztlak, Archimédův zákon, dynamické veličiny, odporové síly, tvarový odpor, Bernoulliho rovnice, Magnusův jev) Studijní program,
BIOMECHANIKA 8, Disipativní síly II. (Hydrostatický tlak, hydrostatický vztlak, Archimédův zákon, dynamické veličiny, odporové síly, tvarový odpor, Bernoulliho rovnice, Magnusův jev) Studijní program,
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
3 Mechanická energie 5 3.1 Kinetická energie... 6 3.3 Potenciální energie... 6. 3.4 Zákon zachování mechanické energie... 9
 Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
Stanovení měrného tepla pevných látek
 61 Kapitola 10 Stanovení měrného tepla pevných látek 10.1 Úvod O teple se dá říci, že souvisí s energií neuspořádaného pohybu molekul. Úhrnná pohybová energie neuspořádaného pohybu molekul, pohybu postupného,
61 Kapitola 10 Stanovení měrného tepla pevných látek 10.1 Úvod O teple se dá říci, že souvisí s energií neuspořádaného pohybu molekul. Úhrnná pohybová energie neuspořádaného pohybu molekul, pohybu postupného,
DUM 10 téma: Nespojitá regulace pracovní listy
 DUM 10 téma: Nespojitá regulace pracovní listy ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 3. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika
DUM 10 téma: Nespojitá regulace pracovní listy ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 3. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Funkce. Úkol: Uveďte příklady závislosti dvou veličin.
 Funkce Pojem funkce Dostupné z Metodického portálu www.rvp.cz, ISSN: 1802-4785, financovaného z ESF a státního rozpočtu ČR. Provozováno Výzkumným ústavem pedagogickým v Praze. Funkce vyjadřuje závislost
Funkce Pojem funkce Dostupné z Metodického portálu www.rvp.cz, ISSN: 1802-4785, financovaného z ESF a státního rozpočtu ČR. Provozováno Výzkumným ústavem pedagogickým v Praze. Funkce vyjadřuje závislost
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Sauter Components 71211642920 05
 21.164/1 SHK 621...661: Regulátory teploty pro jednotky Fan Coil, elektromechanické Vaše výhoda pro dosažení vyšší energetické účinnosti Umožňuje ovládat vzduchotechnické komponenty na základě potřeby.
21.164/1 SHK 621...661: Regulátory teploty pro jednotky Fan Coil, elektromechanické Vaše výhoda pro dosažení vyšší energetické účinnosti Umožňuje ovládat vzduchotechnické komponenty na základě potřeby.
Algebra blokových schémat Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Střední odborná škola a Střední odborné učiliště, Dubno
 Číslo projektu Číslo materiálu Název školy Autor Tematická oblast Ročník CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_AUT-2.N-15-PROPORCNI SYSTÉM SE ZPOZDENIM DRUHEHO RADU Střední odborná škola a Střední odborné
Číslo projektu Číslo materiálu Název školy Autor Tematická oblast Ročník CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_AUT-2.N-15-PROPORCNI SYSTÉM SE ZPOZDENIM DRUHEHO RADU Střední odborná škola a Střední odborné
Měření a regulace vytápění
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Měření a regulace vytápění Zpět na obsah 118 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Měření a regulace vytápění Zpět na obsah 118 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů