Abstrakt: Klíčová slova: Abstract: Keywords:
|
|
|
- Hana Němcová
- před 6 lety
- Počet zobrazení:
Transkript
1
2 ~ 1 ~
3 Abstrakt: Tato práce seznamuje se základním zpracováním obrazu v oblasti šedotónového a binárního obrazu. Zabývá se také analýzou získaných dat. Seznamuje s termíny jako morfologie či segmentace obrazu. Získané poznatky jsou aplikovány pro tvorbu programu na kompletní zpracování mikroskopického obrazu v programovém prostředí LabView s následnou analýzou a vykreslením výsledků do obrazu. Probíhající operace jsou pro lepší představu dokládány průběžnými obrázky. Klíčová slova: Obraz, digitalizace, analýza diskrétní signál, barevné systémy, maskové operátory, obrazové filtry, morfologické transformace, segmentace, prahování, maska, pixel, aplikace, zobrazovací systémy, LabView, IMAQ, Vision. Abstract: This project informs about the basic image processing on grayscale and binary images. The project deals with analyzing the data obtained. Acquaints with terms such as morphology and image segmentation. Acquired knowledge is applied to create a program to complete the processing of microscopic images in LabView programming environment with subsequent analysis and plotting of results into image. For a better idea supporting data about operation in progress are continuous images. Keywords: Image, digital, discrete signals, analysis, color systems, kernel, structuring element, image filters, morphological transformation, segmentation, thresholding, mask, pixel, application, imaging systems, LabView, IMAQ, Vision. ~ 2 ~
4 PAVLIŠTA, L. Programové vybavení pro práci s mikroskopickým obrazem. Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, s, 19 příl., Vedoucí diplomové práce Ing. Vratislav Čmiel. ~ 3 ~
5 Prohlášení Prohlašuji, že svou semestrální práci na téma Programové vybavení pro práci s mikroskopickým obrazem jsem vypracoval samostatně pod vedením vedoucího semestrální práce a s použitím odborné literatury a dalších informačních zdrojů, které jsou všechny citovány v práci a uvedeny v seznamu literatury na konci práce. Jako autor uvedené semestrální práce dále prohlašuji, že v souvislosti s vytvořením této semestrální práce jsem neporušil autorská práva třetích osob, zejména jsem nezasáhl nedovoleným způsobem do cizích autorských práv osobnostních a jsem si plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení 152 trestního zákona č. 140/1961 Sb. V Brně dne 18. května podpis autora Poděkování Děkuji vedoucímu semestrální práce Ing. Vratislavu Čmielovi. za účinnou metodickou, pedagogickou a odbornou pomoc a další cenné rady při zpracování mé semestrální práce. V Brně dne 18. května podpis autora ~ 4 ~
6 Obsah OBSAH SEZNAM OBRÁZKŮ ÚVOD OBRAZ ÚVOD SPOJITÝ A DISKRÉTNÍ OBRAZ DISKRÉTNÍ OBRAZY Druhy barevných systémů Převody mezi barevnými systémy Bitová hloubka obrazů ANALÝZA A ZPRACOVÁNÍ OBRAZU Histogram Transformační funkce Ostření a zvýrazňování hran Prostorová filtrace Segmentace obrazu Binární morfologie MIKROSKOPY LABVIEW ÚVOD O programu LabView Obecný návrh programu KOSTRA PROGRAMU Programová smyčka Obrazová smyčka Událostní smyčka Proměnné NAČTENÍ OBRAZU Ze souboru Z kamery ÚPRAVY OBRAZU Negativ Mediánová filtrace Ekvalizace Konvoluce LookUp nastavení SEGMENTACE Prahování Separace Rozvodí MORFOLOGIE ~ 5 ~
7 4.6.1 Odstranění děr Odstranění okrajů Odstranění malých objektů Vyplnění prohlubní Morfologické operace ANALÝZA Hledání kruhů Hledání hran Kostra objektů Těžiště Řez obrazem Kvantifikace Vzdálenost Analýza částic PROGRAMOVÉ VOLBY A ÚPRAVY Aplikovat úpravu Zpět zdroj Vyříznout Změnit rozměry Externí okno Změna palety Prolnutí Vložit do originálu Nápověda VÝSLEDKY ZÁVĚR SEZNAM POUŽITÉ LITERATURY: SEZNAM PŘÍLOH: Seznam obrázků OBRÁZEK 2.2A: DVOUROZMĚRNÁ VZORKOVACÍ FUNKCE OBRÁZEK 2.2B: SPEKTRUM SPOJITÉHO 2D OBRAZU OBRÁZEK 2.2C: PŘÍKLADY VZNIKU ALIASINGU PŘI ŠPATNÉ VZORKOVACÍ FREKVENCI OBRÁZEK 2.3: DRUHY OBRAZŮ OBRÁZEK : MODEL RGB KRYCHLE A MODEL SKLÁDÁNÍ BAREV RGB OBRÁZEK : MODELEM SYSTÉMU HSL JE DVOJICE ROTAČNÍCH KUŽELŮ OBRÁZEK : MODELEM SYSTÉMU HSV JE PRAVIDELNÝ ŠESTIBOKÝ JEHLAN OBRÁZEK : MODEL CMY KRYCHLE A MODEL SKLÁDÁNÍ BAREV CMY OBRÁZEK 2.4.1: HISTOGRAM 8 BITOVÉHO ŠEDOTÓNOVÉHO OBRAZU ~ 6 ~
8 OBRÁZEK : EKVALIZACE HISTOGRAMU OBRÁZEK 2.4.2: PŘÍKLAD LUT PO ČÁSTECH LINEÁRNÍ MODIFIKACE OBRÁZEK 2.4.3: PROFIL HRANY PŮVODNÍHO PŘECHODU A PROFIL HRANY PO POUŽITÍ OSTŘÍCÍHO OPERÁTORU OBRÁZEK A: APLIKACE GRADIENTNÍHO FILTRU OBRÁZEK B: APLIKACE GRADIENTNÍHO FILTRU OBRÁZEK C: APLIKACE LAPLACIÁNU OBRÁZEK D: APLIKACE LAPLACIÁNU OBRÁZEK E: PŘÍKLAD APLIKACE VYHLAZOVACÍHO FILTRU OBRÁZEK F: PŘÍKLAD APLIKACE GAUSSOVA FILTRU OBRÁZEK : PŘÍKLAD APLIKACE SIGMA FILTRU OBRÁZEK : SEGMENTACE OBRAZU PRAHOVÁNÍM OBRÁZEK : APLIKACE METODY ROZVODÍ OBRÁZEK A: PŘÍKLADY NEJBĚŽNĚJŠÍCH VELIKOSTÍ MASEK OBRÁZEK B: PŘÍKLAD VLIVU HODNOTY MASKY OBRÁZEK C: VLIV PIXELOVÉHO TVARU MASKY NA VLIV OKOLÍ TRANSFORMOVANÉHO PIXELU OBRÁZEK : GRAFICKÉ ZNÁZORNĚNÍ VZTAHU SOUSEDNÍCH PIXELŮ PRO TYPY KONEKTIVITY: OBRÁZEK A: APLIKACE MORFOLOGICKÝCH OPERACÍ OBRÁZEK B: APLIKACE FUNKCE HIT-MISS OBRÁZEK C: APLIKACE FUNKCE THINNING A THICKENING OBRÁZEK D: PŘÍKLAD APLIKACE VYBRANÝCH FUNKCÍ OBRÁZEK D: (POKRAČOVÁNÍ) OBRÁZEK A: APLIKACE FUNKCE SKELETON OBRÁZEK B: PŘÍKLAD APLIKACE VYBRANÝCH FUNKCÍ OBRÁZEK 4.1.2: ZÁKLADNÍ BLOKOVÉ SCHÉMA PROGRAMU OBRÁZEK 4.2: ZÁKLADNÍ KONSTRUKCE PROGRAMU OBRÁZEK : IMPLEMENTACE A NASTAVOVÁNÍ PROMĚNNÝCH V PROGRAMU OBRÁZEK 4.3.1: SCHÉMA ZAPOJENÍ: NAČÍTÁNÍ ZE SOUBORU OBRÁZEK 4.3.2: SCHÉMA ZAPOJENÍ: NAČÍTÁNÍ Z KAMERY OBRÁZEK 4.4.1: SCHÉMA ZAPOJENÍ: NEGATIV OBRÁZEK 4.4.2: SCHÉMA ZAPOJENÍ: MEDIÁN ~ 7 ~
9 OBRÁZEK 4.4.3: SCHÉMA ZAPOJENÍ: EKVALIZACE OBRÁZEK 4.4.4: SCHÉMA ZAPOJENÍ: KONVOLUCE OBRÁZEK 4.4.5: SCHÉMA ZAPOJENÍ: LOOKUP NASTAVENÍ: OBRÁZEK A: SCHÉMA ZAPOJENÍ: HISTOGRAMY PRO BAREVNÝ OBRAZ OBRÁZEK B: SCHÉMA ZAPOJENÍ: MANUÁLNÍ NASTAVOVÁNÍ PRAHŮ PRO BAREVNÝ OBRAZ OBRÁZEK : SCHÉMA ZAPOJENÍ: APLIKACE PRAHOVÁNÍ OBRÁZEK 4.5.2A: SCHÉMA ZAPOJENÍ: APLIKACE SEPARACE OBRÁZEK 4.5.2B: PŘÍKLAD APLIKACE SEPARACE OBRÁZEK 4.5.3: SCHÉMA ZAPOJENÍ: APLIKACE ROZVODÍ OBRÁZEK 4.6.1: SCHÉMA ZAPOJENÍ: (A) APLIKACE ODSTRANĚNÍ DĚR, (B) APLIKACE ODSTRANĚNÍ OKRAJŮ OBRÁZEK 4.6.3: SCHÉMA ZAPOJENÍ: (A) APLIKACE ODSTRANĚNÍ MALÝCH OBJEKTŮ, (B) APLIKACE VYPLNĚNÍ PROHLUBNÍ OBRÁZEK 4.6.5: SCHÉMA ZAPOJENÍ: (A) APLIKACE MORFOLOGICKÝCH OPERACÍ NA BINÁRNÍ OBRAZ, (B) APLIKACE MORFOLOGICKÝCH OPERACÍ NA BINÁRNÍ OBRAZ OBRÁZEK 4.7.1: SCHÉMA ZAPOJENÍ: HLEDÁNÍ KRUHŮ OBRÁZEK 4.7.2: SCHÉMA ZAPOJENÍ: HLEDÁNÍ HRAN OBRÁZEK 4.7.2: SCHÉMA ZAPOJENÍ: (A) KOSTRA OBJEKTŮ, (B) TĚŽIŠTĚ OBRÁZEK 4.7.5A: SCHÉMA ZAPOJENÍ: ŘEZ OBRAZEM OBRÁZEK 4.7.5B: PŘÍKLAD APLIKACE ŘEZU OBRAZEM OBRÁZEK 4.7.6: SCHÉMA ZAPOJENÍ: (A) KVANTIFIKACE, (B) VZDÁLENOST OBRÁZEK 4.7.8A: SCHÉMA ZAPOJENÍ: ANALÝZA ČÁSTIC S POPISEM HODNOT OBJEKTŮ OBRÁZEK 4.7.8B: NÁČRT PRINCIPU DOSAŽENÍ SOUŘADNICOVÝCH HODNOT OBRÁZEK 4.8.1: BLOKOVÉ SCHÉMA: APLIKACE ÚPRAV OBRÁZEK 4.8.3: SCHÉMA ZAPOJENÍ: (A) VYŘÍZNOUT, (B) ZMĚNIT ROZMĚRY OBRÁZEK 4.8.7A: BLOKOVÉ SCHÉMA APLIKACE PROLNUTÍ OBRÁZEK 4.8.7B: SCHÉMA ZAPOJENÍ: PROLNUTÍ OBRÁZEK 4.9.1: (ZAČÁTEK:) DÍLČÍ ZPRACOVÁNÍ OBRAZU A JEHO VÝSLEDKY: RGB OBRAZ Z FLUORESCENČNÍHO MIKROSKOPU OBRÁZEK 4.9.1: (POKRAČOVÁNÍ:) OBRÁZEK 4.9.1: (DOKONČENÍ:) OBRÁZEK 4.9.2: (ZAČÁTEK:) ~ 8 ~
10 OBRÁZEK 4.9.2: (DOKONČENÍ:) DÍLČÍ ZPRACOVÁNÍ OBRAZU A JEHO VÝSLEDKY: RGB OBRAZ Z FLUORESCENČNÍHO MIKROSKOPU OBRÁZEK 4.9.3: (ZAČÁTEK:) OBRÁZEK 4.9.3: (DOKONČENÍ:) DÍLČÍ ZPRACOVÁNÍ OBRAZU A JEHO VÝSLEDKY: ŠEDOTÓNOVÝ OBRAZ OBRÁZEK 4.9.4: (ZAČÁTEK:) OBRÁZEK 4.9.4: (DOKONČENÍ:) DÍLČÍ ZPRACOVÁNÍ OBRAZU A JEHO VÝSLEDKY: RGB OBRAZ ~ 9 ~
11 1 Úvod Úkolem této diplomové práce je seznámit se s danou problematikou při zpracovávání mikroskopického obrazu. První část práce je věnována obrazům a to od počátku jejich vzniku, přes jejich rozdělení a členění, až po samotné zpracování a následnou analýzu. Převážně se tato část věnuje filtrům, kterými je obraz upravován ve stupních šedi. Druhá polovina tohoto tématu je věnována primárním a pokročilým morfologickým operacím, tedy pro práci s binárním obrazem. V další části bylo nahlédnuto do oblasti a problematiky mikroskopie. Tato kapitola je velice stručná, avšak nastiňuje základní nedostatky při snímání mikroskopického obrazu pomocí digitálních kamer. V poslední stěžejní části této práce byl vytvořen a podrobně popsán návrh uživatelsky příjemného programového prostředí, který využívá poznatků práce s obrazem z předchozích kapitol k praktickému použití. Program má mnoho funkčních bloků, které jsou užitečné pro úpravy a analýzu buněčných struktur. Tento program byl navrhnut i s ohledem na uživatele, který se v dané problematice neorientuje. ~ 10 ~
12 2 Obraz 2.1 Úvod Zrakový orgán je jeden z nejdůležitějších lidských smyslů a obraz je signál, který vnímáme pomocí zraku. Takto vnímaný signál je spojitý. Pro zpracování obrazu v programu bude však nutné spojitý signál diskretizovat, více v následující kapitole. 2.2 Spojitý a diskrétní obraz Obraz je z hlediska signálu vícerozměrný. Pokud se jedná o spojitý vícerozměrný obraz, tak se nazývá skalární funkcí spojitého vektorového argumentu. Nejběžnějším příkladem vícerozměrného signálu je právě obraz. Pokud se jedná o statický obraz tak mluvíme o dvourozměrném signálu reprezentovaný jasovou funkcí právě dvou souřadnic v prostoru f (x, y). Signálem, který má tři rozměry, je například časově proměnný obraz f (x, y, t). Pokud se bude jednat o diskrétní obraz, pak jeho diskrétní reprezentaci získáme vzorkováním jeho spojité předlohy, tedy vynásobením vzorkovací funkcí (obrázek 2.2a) ( ) ( ) (1) takže obraz vzorkovaný v pravoúhlé síti s kroky je v kvazispojité interpretaci ( ) ( ) ( ) ( ) ( ) (2) Obrázek 2.2a: Dvourozměrná vzorkovací funkce. [1, 2] ~ 11 ~
13 Výsledky spektra vzorkovaného obrazu jsou periodické a jsou tvořeny nekonečným množstvím replik původního spektra, které jsou posunuté o celé násobky úhlových vzorkovacích kmitočtů U, V (obrázek 2.2b). Pokud má dojít k možnosti obnovy původního obrazu beze změny z jeho vzorkovaného originálu, nesmějí se sousední repliky spektra ve spektrální oblasti jakkoli překrývat. To bude dodrženo pouze tehdy, pokud originální spektrum spojitého obrazu (obrázek 2.2b) bude omezené s mezními kmitočty u max, v max a bude-li dostatečně jemným vzorkováním splněn vzorkovací teorém pro 2D signál Pokud má dojít k obnovení původního obrazu z jeho vzorkované verze, tak se odstraní všechny repliky kromě repliky v původní poloze ve spektru. (3) Obrázek 2.2b: Spektrum spojitého 2D obrazu, které je frekvenčně omezené a následná periodizace způsobená vzorkováním. [1, 2] V případě, že není dodržen vzorkovací teorém pro 2D signály (3), pak dochází při jeho rekonstrukci ke zkreslení původního obrazu k tak zvanému aliasingu (obrázek 2.2c), kdy se vlivem nedostatečné vzorkovací frekvence, která musí být podle (3) minimálně dvojnásobná než je frekvence přítomná v obraze. Jedná se o nevratné zkreslení. ~ 12 ~
 originální obraz, který je dobře vzorkovaný, (b) obraz s poloviční vzorkovací")
 (b) (c) 3: Druhy obrazů: (a) 24 bitový RGB obraz, (b) 8 bitový obraz v odstínech šedi, (c) binární obraz.")
![[Generováno vlastním programem v LabView] 2.3.](/docs-images/73/68133488/images/14-2.jpg "1 Druhy barevných systémů Barevný prostor se rozkládá ve třírozměrném souřadnicovém systému, kde je každá barva reprezentována jedním bodem.")
14 Obrázek 2.2c: Příklady vzniku aliasingu při špatné vzorkovací frekvenci: (a) originální obraz, který je dobře vzorkovaný, (b) obraz s poloviční vzorkovací frekvencí, (c) obraz se čtvrtinovou vzorkovací frekvencí, (d) obraz se čtvrtinovou vzorkovací frekvencí po použití filtru typu dolní propust. [2] 2.3 Diskrétní obrazy Příklady různých typů obrazu vztahující se k této kapitole jsou na obrázku 2.3. (a) (b) (c) Obrázek 2.3: Druhy obrazů: (a) 24 bitový RGB obraz, (b) 8 bitový obraz v odstínech šedi, (c) binární obraz. [Generováno vlastním programem v LabView] Druhy barevných systémů Barevný prostor se rozkládá ve třírozměrném souřadnicovém systému, kde je každá barva reprezentována jedním bodem. V praxi se používá několik barevných systémů, protože lidé vnímají barvy dle parametrů jako je jas, odstín a intenzita, zatímco počítač pracuje s barvami ~ 13 ~
![jako s kombinacemi červené, zelené a modré barvy. V polygrafii se používají barvy azurová, purpurová a žlutá, které udávají výslednou barvu. [3, 4] 2.3.1.](/docs-images/73/68133488/images/15-1.jpg "1 Systém RGB Barvy obrazu se skládají ze tří základních složek a to je červená (Red), zelená (Green) a modrá (Blue). Jedná se o nejvíce používaný systém.")
15 jako s kombinacemi červené, zelené a modré barvy. V polygrafii se používají barvy azurová, purpurová a žlutá, které udávají výslednou barvu. [3, 4] Systém RGB Barvy obrazu se skládají ze tří základních složek a to je červená (Red), zelená (Green) a modrá (Blue). Jedná se o nejvíce používaný systém. Lidské oko obdrží barevné informace v samostatných složkách červené, zelené a modré barvy, které snímají receptory uvnitř oka. Lidský mozek dále zpracovává tyto tři základní barevné komponenty a sestavuje z nich kombinací jednu barvu obrazu. RGB systém si můžeme také představit jako třírozměrnou kostku s červenou, modrou a zelenou v rozích každé osy (obrázek ). Černá je na počátku os, zatímco bílá barva je u protějšího rohu krychle. Každá strana krychle má hodnotu mezi 0 a 1. Tedy v libovolném místě krychle či barva je určena třemi čísly od černé (0,0,0) až po bílou (1,1,1). Diagonální osa krychle představuje stejné zastoupení všech tří základních barev, jedná se o takzvané stupně šedi. [3, 4] Obrázek : Model RGB krychle a model skládání barev RGB Systém HSL Tento systém byl vyvinut, aby se barva dala lépe kvantifikovat. Základem toho systému jsou tři parametry. Je to odstín barvy (Hue), světlost (Lightness) a sytost (Saturation). Odstín odpovídá dominantní vlnové délce barvy a je součástí oranžové, zelené nebo fialové barvy. Lze si také představit škálu odstínů jako duhu. Sytost se vztahuje na množství bílé barvy přidané do odstínu a odpovídá relativní čistotě barvy. Barva bez jakéhokoliv obsahu bílé barvy reprezentuje plnou sytost barvy. Míra nasycení je nepřímo úměrná množství bílého světla, které bylo přidáno. Jas vyjadřuje chromatický pojem o výraznosti neboli amplitudě čili výkonu světla. Chromatičnost je kombinace odstínu a sytosti a vztah mezi chromatičností a jasem charakterizuje barvu. Příklad rozložení jednotlivých složek systému HSL je na obrázku [3, 4] Systém HSV Systém je principiálně podobný systému HSL, akorát místo třetího parametru světlosti (Lightness), se využívá parametr jasové hodnoty (Value) což je množství přítomnosti bílého světla (obrázek ). [3, 4] ~ 14 ~




16 Obrázek : Modelem systému HSL je dvojice rotačních kuželů. Obrázek : Modelem systému HSV je pravidelný šestiboký jehlan Systém CMY Tento systém je druhým nejběžnějším systémem po RGB. Je složen ze základních barev azurové (Cyan), purpurové (Magenta) a žluté (Yellow). Jedná se o subtraktivní metodu, jelikož primární barvy CMY se odečítají od bílé barvy, tím vzniká požadovaná barva (obrázek ). Systém CMY se používá hlavně u barevného tisku. Jedná se o doplněk k RGB barevnému systému, protože barvy azurová, purpurová a žlutá jsou doplňkem barev červené, zelené a modré. Jinak se jedná o stejný princip jako u RGB systému. [3, 4] Obrázek : Model CMY krychle a model skládání barev CMY. ~ 15 ~
17 Ostatní systémy CIE je systém na základě jasu, barevného odstínu a barevnosti určený podle pocitů člověka jak je dokáže vnímat. YIQ na principu oddělení jasové informace (Y) od barevné informace (I a Q). Používá se pro televizní vysílání. Existují i jiné systémy barev, které nebudeme zmiňovat. [3] Převody mezi barevnými systémy Jsou možnosti jak převést RGB na stupně šedi a převody jednoho barevného systému do jiného. Transformace z RGB systému na šedotónový je lineární, ale u převodu mezi jinými systémy dochází i k nelineární transformaci, protože některé barevné systémy představují barvy, které nemohou být zastoupené v jiných systémech. [3] Převod RGB na stupně šedi Podle rovnice (4) se převádí RGB systém na šedotónový. Přepočet platí pro jednotlivé pixely. Tato rovnice (4) je součástí standardu NTSC pro jas. Alternativou převodu z RGB obrazu na stupně šedi je prostý průměr (5), (4) Ostatní převody mezi systémy zde není nutné uvádět, protože v této práci je momentálně nevyužijeme. (5) Bitová hloubka obrazů Obrazy se rozdělují nejen podle barevných systémů, ale i podle barevné hloubky případně stupňů šedi. S tím také souvisí paměťová náročnost konkrétních typů obrazů (tabulka 2.3.3). Při digitalizaci dat, tedy převodu pomocí analogově-digitálního (A/D) převodníku, může každý konečný kód reprezentovat pouze omezeně přesné číslo, protože naměřené hodnoty jsou zaokrouhleny či oříznuty k nejbližší dostupné úrovni A/D převodníku. Dnes se požívá nejčastěji 256, 4096 nebo úrovní, které odpovídají 8, 12 nebo 16 bitovým A/D převodníkům (tabulka 2.3.3). [2] ~ 16 ~
18 Typ obrazu 8 bitů (Bez znaménka) Celé číslo Šedotónový (1 bajt nebo 8 bitů) 16 bitů (Se znaménkem) Celé číslo Šedotónový (2 bajty nebo 16 bitů) 32 bitů S plovoucí čárkou Šedotónový (4 bajty nebo 32 bitů) Počet bajtů na jeden pixel dat 8 bitová intenzita ve stupních šedi 16 bitová intenzita ve stupních šedi 32 bitová intenzita ve stupních šedi RGB obraz (4 bajty nebo 32 bitů) 8 bitů pro alfa hodnotu (není použito) 8 bitů pro červenou intenzitu 8 bitů pro zelenou intenzitu 8 bitů pro modrou intenzitu HSL obraz (4 bajty nebo 32 bitů) 8 bitů není použito 8 bitů pro odstín 8 bitů pro sytost 8 bitů pro světlost Komplexní (8 bajtů nebo 64 bitů) 32 bitů s plovoucí čárkou pro 32 bitů pro imaginární část reálnou část Tabulka 2.3.3: Tabulka paměťové náročnosti jednotlivých systémů (bajty na pixel), platí pro programové vybavení LabView. [3] ~ 17 ~
19 2.4 Analýza a zpracování obrazu Analýza obrazu kombinuje techniky, které počítají statistiky a měření založené na šedoúrovňové intenzitě jednotlivých pixelů v obraze. Obrazová analýza se může používat k pochopení obsahu obrazu a následnému použití vhodného nástroje k provedení požadované úpravy obrazových dat. [3] Histogram Histogram (obrázek 2.4.1) se počítá a znázorňuje počet pixelů, ze kterých je složen celkový obraz na příslušné úrovni šedi (platí pro šedotónový obraz). Počet pixelů na všech úrovních šedi v součtu udává celkový počet pixelů v obraze. Obecně histogram poskytuje informace o rozdělení úrovní intenzity v obraze, které mohou sloužit k posouzení a následnému nastavení zobrazovacího systému s ohledem na využití dynamického rozsahu hodnot pixelů, které jsou k dispozici. Pro šedotónový 8 bitový obraz, tedy 256 úrovní šedi, odpovídá obrázku Například pro barevný RGB obraz, po rozložení obrazu na jednotlivé složky R, G a B, přísluší každé složce vlastní histogram. Pro celkový RGB obraz lze udávat například jasový histogram. [2, 3] Obrázek 2.4.1: Histogram 8 bitového šedotónového obrazu. [2] Ekvalizace Vhodný obraz by měl obsahovat oba extrémy jasu, to jest černá i bílá, pro lepší vizuální dojem, tedy pokud budeme předpokládat rovnoměrné rozložení všech dílčích odstínů šedi. Ekvalizace, též popisována jako ekvalizace histogramu, slouží k vyrovnání nerovnoměrného rozložení stupňů šedi jednotlivých pixelů v obrazu o rozsahu 0 až 255 (pro 8-bitový obraz). Rozložení jednotlivých úrovní šedi záleží na jejich zastoupení, což znamená, že úrovně s největším zastoupením jsou právě rozdělovány do celého rozsahu hodnot stupňů šedi. Tato transformace pomáhá zvýšit kontrast na snímcích, kde není využit celý rozsah hodnot úrovní šedi (obrázek ). [2] ~ 18 ~
 histogram původního obrazu, (b) upravený histogram pomocí ekvalizace. [Generováno vlastním programem v LabView] 2.4.")
20 (a) (b) Obrázek : Ekvalizace histogramu: (a) histogram původního obrazu, (b) upravený histogram pomocí ekvalizace. [Generováno vlastním programem v LabView] Transformační funkce Transformační funkce (LUT = lookup table) patří mezi základní zpracování obrazu zdůrazňující detaily v oblastech, které obsahují důležité informace, na úkor jiných oblastí. (Lookup table = vyhledávací tabulka, protože zpracováváme diskrétní signál, je každému vstupnímu bodu přiřazena odpovídající hodnota z tabulky pro hodnotu na výstup, která je vytvořena podle tvaru transformační funkce), (obrázek 2.4.2). Mezi tyto transformační funkce patří ekvalizace histogramu, gama korekce, exponenciální a logaritmické korekce obrazu. LUT se používá ke zlepšení kontrastu a jasových hodnot obrazu změnou dynamického rozsahu v oblastech se špatným kontrastem. [2, 3] Obrázek 2.4.2: Příklad LUT po částech lineární modifikace zvýšení kontrastu a LUT tabulka (nelineární). [2] ~ 19 ~
21 2.4.3 Ostření a zvýrazňování hran Subjektivní kvalita obrazu závisí do značné míry na ostrosti a dobré rozeznatelnosti hran což souvisí s vlastnostmi lidského zraku, který je nedokonalý. Rozeznání tvarů či objektů vychází z identifikace ostrých hran, pokud jsou tyto hrany slabě prezentovány, pak nejsou lidským zrakem správně vyhodnoceny pro nedostatek informací. Zvyšovaní ostrosti zdůrazňováním hran tak přispívá k lepšímu vnímání subjektivního obrazu čímž se myslí lepší viditelnost detailů a lepší rozeznatelnost tvarů a objektů. Nedostatek ostrosti může být způsoben zvolenou zobrazovací metodou nebo špatnou kvalitou zobrazovacího systému. [2] Obrázek 2.4.3: Profil hrany původního přechodu a profil hrany po použití ostřícího operátoru. [2] Obrazy s malou ostrostí lze formulovat buď v prostorové oblasti jako pomalou změnu intenzity přes okraje objektu nebo ve frekvenční oblasti jako nízký podíl či nepřítomnost vysokofrekvenčních složek. Ostrost může být tedy vylepšena zvýšením intenzity pomocí sklonu profilu hrany nebo ve frekvenční oblasti zesílením vysokofrekvenčních složek. Je třeba také zmínit rozdíl mezi ostrostí a rozlišením a to tak, že žádné ostření nemůže zlepšit reálné rozlišení obrazu. Ostřením můžeme jen zvýšit detaily, které již existují. V podstatě můžeme pouze zvýšit strmost hran a případně přidat určité překročení hodnot intenzity obrysů (obrázek 2.4.3), čímž jsou hranice objektů (hrany) lépe viditelné. Kvantitativní hodnocení ostření je obvykle založeno na porovnávání hrany šířky profilu, která je mezi 10% až 90% amplitudy. [2] Prostorová filtrace Filtry dělíme podle linearity (tabulka 2.4.4) na lineární a nelineární. Lineární filtrace, pro kterou se také používá termín konvoluce, je algoritmus, který přepočítává hodnoty pixelů na základě svých vlastních hodnot a hodnot pixelů z jeho okolí, které jsou váženými koeficienty podle zadání konvoluční matice. Součet tohoto výpočtu je dělený součtem prvků v matici pro získání nové hodnoty pixelu. Velikost konvoluční matice je teoreticky neomezená a může být čtvercová či obdélníková například velikosti: 3 x 3, 5 x 5, 9 x 3, 129 x 129 a podobně. ~ 20 ~
22 Prostorové filtry se používají například k detekci hran v určitém směru, k hledání tvarů vzorů, redukce šumu, k vyhlazování a k ostření tedy zvýraznění hran. [3] Prostorové filtry se dále rozdělují (tabulka 2.4.4) na typ horní propusti, které zdůrazňují výrazné rozdíly v intenzitě světla, které se objevují obvykle na hranici objektů. Tento typ filtrů také pomáhá izolovat náhlé změny v obraze, které odpovídají ostrým hranám, detailům a šumu. Prostorové filtry typu dolní propusti tlumí změny intenzity světla a pomáhá zdůraznit mírné změny v obraze, jako jsou objekty a pozadí. Také se používají k vyhlazování obrazu odstraněním detailů a rozmazáním hran. [3] Filtr typu: Filtry Lineární Horní propust Dolní propust Gradient, Laplacián Smoothing (vyhlazovací), Gaussián Nelineární Horní propust Dolní propust Gradient, Roberts, Sobel, Prewitt, Differentiantion (rozdílový), Sigma Medián, Nth Order, Lowpass (dolní propust) Tabulka 2.4.4: Přehled rozdělení prostorových filtrů. [3] Poznámka: Výše zmíněná tabulka je podle literatury [3], která je vypracována pro aplikaci v programovém prostředí LabView. Avšak podle odborné literatury [2] dochází k rozepři v zařazení některých filtrů podle výše zmíněného. Například zde je filtr Laplacián zařazen mezi lineární filtry, v literatuře [2] je zařazen mezi filtry nelineární. Vše je nejspíše způsobeno rozdílným přístupen k výpočtu (v [2] dochází k přepočtům ve frekvenční oblasti, v [3] se přepočítává pouze v oblasti prostorové). Získané informace se budou používat v programovém prostředí LabView, a proto se tento text bude nadále držet převážně literatury [3] Lineární filtry Lineární filtr nahradí každý pixel váženým součtem svého okolí. Matice definující okolí pixelu také určuje váhu přiřazenou konkrétnímu okolnímu pixelu. Této matici také říkáme maska operátoru. Pokud filtr obsahuje v masce operátoru záporné a kladné koeficienty, tak přenosová funkce je ekvivalentní váženým rozdílům obrazu a vytváří ostřící filtr nebo filtr typu horní propust. Laplacián a gradientní filtry jsou typické vysokofrekvenční filtry. Pokud ~ 21 ~
 filtry. [3] Gradientní filtr Gradientní neboli přechodový filtr upozorňuje na změny intenzity světla v konkrétním směru, což má za následek nastínění hran a odhalení textur.")
![Definice masky gradientního filtru vychází z první derivace hran. Pro lineární gradientní filtr platí následující model [ ] (6) kde a,b,c a d jsou celá čísla a x=0 nebo 1.](/docs-images/73/68133488/images/23-2.jpg "Tato maska (6) má osu mezi kladnými a zápornými koeficienty a protíná centrální prvek, dále udává orientaci hran na obrysu.")
23 jsou všechny koeficienty v masce operátoru pozitivní, pak bude funkce převodu ekvivalentní váženému součtu a vytváří vyhlazovací filtr nebo filtr typu dolní propust, mezi které patří Gaussian filtry a smoothing (vyhlazovací) filtry. [3] Gradientní filtr Gradientní neboli přechodový filtr upozorňuje na změny intenzity světla v konkrétním směru, což má za následek nastínění hran a odhalení textur. Definice masky gradientního filtru vychází z první derivace hran. Pro lineární gradientní filtr platí následující model [ ] (6) kde a,b,c a d jsou celá čísla a x=0 nebo 1. Tato maska (6) má osu mezi kladnými a zápornými koeficienty a protíná centrální prvek, dále udává orientaci hran na obrysu. Například, pokud a=0, b=-1, c=-1, d=-1 a x=0, pak maska má následující tvar [ ] (7) Pro daný směr se může navrhnout gradientní filtr, který zvýrazní nebo ztmaví hrany podél osy v určeném směru. Filtr je citlivý na změny intenzity, která je kolmá k ose symetrie jeho masky, tudíž zdůrazňuje pixely, kde se intenzita světla zvyšuje ve směru kolmém na osu symetrie orientovaným od záporných koeficientů ke kladným podle masky, a tmavne tam, kde intenzita světla klesá (obrázek a). [3] (a) (b) (c) Obrázek a: Aplikace gradientního filtru: (a) originální obraz, (b) výsledek filtrace maskovým operátorem typu Prewitt #2 (7), (c) výsledek filtrace po aplikaci maskového operátoru typu Prewitt #10 (8a). [Generováno vlastním programem v LabView] ~ 22 ~
 (b) (c) (8) Gradientní filtr má dva účinky a to v závislosti na tom, zdali je centrální koeficient x roven 1 nebo 0.")
 proběhne stejný postup, jako je uvedeno výše, ale dojde k vrstvení přes originální obraz.")
24 Poznámka: Všechny dostupné předdefinované maskové operátory (pro program LabView) typu Prewitt #x, Laplacian #x, Sobel #x atd. jsou uvedeny v Příloze 3. [ ] [ ] [ ] (a) (b) (c) (8) Gradientní filtr má dva účinky a to v závislosti na tom, zdali je centrální koeficient x roven 1 nebo 0. Pokud je tento koeficient nulový (x=0), pak dochází k extrakci hran a výsledkem jsou zvýrazněné hrany podle typu maskového operátoru (obrázek b). Při centrálním koeficientu rovným jedné (x=1) proběhne stejný postup, jako je uvedeno výše, ale dojde k vrstvení přes originální obraz. Výsledkem bude originální obraz se zvýrazněnými hranami (obrázek b). [3] (a) (b) (c) Obrázek b: Aplikace gradientního filtru: (a) originální obraz, (b) výsledek filtrace maskovým operátorem typu Prewitt #14 (8b), (c) výsledek filtrace po aplikaci maskového operátoru typu Prewitt #15 (8c). [Generováno vlastním programem v LabView] Maskový operátor typu Prewitt #15 (8c) lze pro snadnější pochopení interpretovat jako součet originálního obrazu a výsledného obrazu po aplikaci maskového operátoru typu Prewitt #14 (8b), [ ] [ ] [ ] (9) Čím větší je maska operátoru (3 x 3, 5 x 5, ), tím silnější okraje bude mít detekovaná hrana. [3] ~ 23 ~
25 Laplacián Laplaciánový filtr upozorňuje na změny intenzity světla v okolí pixelu. Filtr extrahuje obrysy objektů a nastiňuje detaily. Oproti gradientnímu filtru je všesměrový a vychází z druhé derivace hran. Pro maskový operátor je použit následující model [ ] (10) kde koeficienty a, b, c a d jsou celá čísla. Podle hodnoty centrálního koeficientu x, který je roven nebo větší součtu absolutních hodnot zbývajících koeficientů, má filtr podle Laplaciánu dva různé účinky. Pokud platí rovnice ( ) (11) pak bude výsledkem obraz, kde jsou extrahované pouze hrany (obrázek c(b)). V případě platnosti nerovnice ( ) (12) bude výsledkem originální obraz, který se bude vrstvit s extrahovanými hranami a vznikne výstupní obraz, kde bude originál se zvýrazněnými hranami (obrázek c(c)). [3] (a) (b) (c) Obrázek c: Aplikace Laplaciánu: (a) originální obraz, (b) výsledek filtrace maskovým operátorem typu Laplacian #3 (13b), (c) výsledek filtrace po aplikaci maskového operátoru typu Laplacian #4 (13a). [Generováno vlastním programem v LabView]. Maskový operátor typu Laplacian #4 (13a) lze opět interpretovat jako součet originálního obrazu a výsledného obrazu po aplikaci maskového operátoru typu Laplacian #3 (13b), ~ 24 ~
![[ ] [ ] [ ] (a) (b) (c) (13) (a) (b) (c) Obrázek 2.4.4.1d: Aplikace Laplaciánu: (a) maskový operátor o velikosti 3 x 3, (b) maskový operátor o velikosti 5 x 5, (c) maskový operátor o velikosti 7 x 7.](/docs-images/73/68133488/images/26-1.jpg "[Generováno vlastním programem v LabView]. Stejně jako pro gradientní filtr platí, že čím vetší bude použitá maska operátoru, tím silněji budou hrany objektů a detaily zvýrazněny (obrázek 2.4.")

26 [ ] [ ] [ ] (a) (b) (c) (13) (a) (b) (c) Obrázek d: Aplikace Laplaciánu: (a) maskový operátor o velikosti 3 x 3, (b) maskový operátor o velikosti 5 x 5, (c) maskový operátor o velikosti 7 x 7. [Generováno vlastním programem v LabView]. Stejně jako pro gradientní filtr platí, že čím vetší bude použitá maska operátoru, tím silněji budou hrany objektů a detaily zvýrazněny (obrázek d) (tloušťkou vyznačení). Dále platí, že čím vyšší centrální koeficient u zvoleného maskového operátoru bude, tím více budou zvýrazněny i méně významné obrysy a detaily. [3] Smoothing filtr Smoothing neboli vyhlazovací filtr zeslabuje všechny intenzity v okolí pixelu, což má za následek vyhlazování celkového tvaru objektů, rozmazání hran a odstranění detailů. Pro vyhlazovací filtr je použit model masky [ ] (14) kde a, b, c a d jsou celá kladná čísla a centrální koeficient x=0 nebo 1. Protože jsou všechny koeficienty v masce kladné, tak každý centrální pixel se přepočítává váženým průměrem jeho sousedů. Čím silnější váha sousedních pixelů bude, tím větší bude vliv na přepočítávaný centrální pixel. Silnější účinek vyhlazování je maskovým operátorem s centrálním koeficientem rovným nule (x=0) než s centrálním koeficientem rovným jedné (x=1). Čím větší maskový operátor bude, tím silnější bude vyhlazovací účinek (obrázek e). [3] Příklad maskových operátorů pro vyhlazovací filtr Smoothing ~ 25 ~
![[ ] [ ] [ ] (a) (b) (c) (15) (a) (b) (c) Obrázek 2.4.](/docs-images/73/68133488/images/27-0.jpg "4.1e: Příklad aplikace vyhlazovacího filtru: (a) originální obraz, (b) výsledek filtrace po aplikaci maskového operátoru typu Smoothing #0 a velikosti masky 3 x 3 (15a), (c) výsledek filtrace po")
27 [ ] [ ] [ ] (a) (b) (c) (15) (a) (b) (c) Obrázek e: Příklad aplikace vyhlazovacího filtru: (a) originální obraz, (b) výsledek filtrace po aplikaci maskového operátoru typu Smoothing #0 a velikosti masky 3 x 3 (15a), (c) výsledek filtrace po aplikaci maskového operátoru typu Smoothing #0 a velikosti masky 5 x 5 (15b). [Generováno vlastním programem v LabView]. Gaussián Gaussův filtr zeslabuje změny intenzity světla v okolí pixelu, což má za následek vyhlazení celkového tvaru objektů a zeslabení detailů. Princip je podobný vyhlazovacímu filtru z předcházející kapitoly, ale rozostření Gaussova filtru je více utlumené. Použitý model masky (14) je stejný jako u vyhlazovacího filtru, kde a, b, c a d jsou celá kladná čísla a centrální koeficient x>1. Protože všechny koeficienty v Gaussově masce jsou kladné, tak se každý pixel vypočítá váženým průměrem jeho okolních pixelů. Čím větší je hodnota váhy (podle masky operátoru) sousedních pixelů, tím větší vliv to má na novou hodnotu centrálního pixelu. Jelikož je centrální koeficient x větší než 1, tak se původní hodnoty pixelu vynásobí váhou větší než je váha všech okolních koeficientů, proto bude výsledek s větším centrálním koeficientem odpovídat jemnějšímu vyhlazovacímu účinku. Velikost masky odpovídá silnějšímu vyhlazovacímu účinku (obrázek f). [3] ~ 26 ~
28 (a) (b) Obrázek f: Příklad aplikace Gaussova filtru: (a) originální obraz, (b) výsledek filtrace po aplikaci maskového operátoru typu Gaussian #0 a velikosti masky 5 x 5 (15b). [Generováno vlastním programem v LabView]. Příklad maskových operátorů pro Gaussův filtr [ ] [ ] [ ] (a) (b) (c) (16) Nelineární filtry Nelineární filtr nahradí hodnotu každého pixelu s nelineární funkcí jeho okolních pixelů. Stejně jako u lineárních filtrů probíhá přepočet hodnot pixelů na základě nejbližšího okolí pixelu podle definovaného maskového operátoru. [3] Prewitt filtr Nelineární Prewitt filtr je horní propustí a extrahuje vnější obrysy objektů, což má za následek zdůraznění výrazných rozdílů v intenzitě světla (hrany) podél vertikální či horizontální osy. Každý pixel je přiřazen nejvyšší hodnotě jeho horizontálnímu či vertikálnímu přechodu získanému pomocí maskového operátoru typu Prewitt. Například Prewitt #0 (17a), Prewitt #12 (17b) a tak podobně. [ ] [ ] (a) (b) (17) Sobel filtr Nelineární Sobel filtr je opět jako v předchozím případě filtr typu horní propust, který extrahuje vnější obrysy objektů, čímž se zdůrazní výrazné rozdíly v intenzitě světla podél ~ 27 ~
, Sobel #20 (18b) a tak dále.")
29 vertikální či horizontální osy. Každý pixel je přiřazen nejvyšší hodnotě jeho horizontálnímu či vertikálnímu přechodu podle maskových operátorů typu Sobel. Příklad těch maskových operátorů například jsou Sobel #16 (18a), Sobel #20 (18b) a tak dále. [ ] [ ] (a) (b) (18) Na rozdíl od Prewitt filtru Sobel filtr přiřadí větší váhu horizontálnímu či vertikálnímu okolí centrálního pixelu. Oba filtry nastiňují obrysy předmětů. Protože mají rozdílné maskové operátory tak v kombinaci má nelineární Prewitt filtr tendenci nastínit zakřivené obrysy, zatímco nelineární Sobel filtr nastiňuje čtvercové obrysy. Tento rozdíl je nejvíce pozorovatelný při porovnávání obrysů izolovaných pixelů. [3] Gradientní filtr Gradientní neboli přechodový filtr zvýrazňuje obrysy, kde se mění intenzita podél svislé osy. [3] Robertsův filtr Robertsův filtr zdůrazňuje obrysy, kde se mění intenzita podél diagonální osy. [3] Rozdílový filtr Diferenční filtr vytváří kontinuální obrysy tím, že zdůrazňuje každý pixel, kde se změna intenzity vyskytuje mezi ním a jeho třemi horně-levými sousedy z okolí pixelu. [3] Sigma filtr Filtr sigma je horní propustí. Naznačuje obrysy a detaily a přepočítává hodnotu pixelů z blízkého okolí, pokud se jejich střední hodnota značně neliší a jedná se o hrany, pak jsou oblasti s podobnými parametry spojeny (obrázek ). [3] (a) (b) Obrázek : Příklad aplikace Sigma filtru: (a) originální obraz, (b) výsledný obraz po filtraci. [Generováno vlastním programem v LabView]. ~ 28 ~
30 Lowpass filtr Lowpass filtr neboli filtr typu dolní propust omezuje detaily a rozmazává hrany. Přepočet hodnot pixelů z blízkého okolí, pokud se jejich střední hodnota značně liší, pak dochází k filtraci. [3] Medián Mediánový filtr je dolní propustí. Každému pixelu je připsána střední hodnota z hodnot pixelů v jeho okolí. Účinně odstraňuje izolované pixely vzniklé například vysokofrekvenčním šumem typu pepř a sůl a snižuje detaily. Avšak mediánový filtr nerozmazává obrysy objektů. Mediánový filtr se dá také aplikovat pomocí Nth Order filtru. [3] Nth Order filtr Princip tohoto filtru je podobný filtru mediánovému s tím, že lze volitelně nastavit prodloužení středního filtru, tím lze vytvořit i masky velikosti o stranách obdélníku. Ke každému pixelu je přiřazena hodnota N, která je řazena vzestupně. Přepočítávanému pixelu je poté opět přiřazena hodnota N pixelu, který se nachází uprostřed hodnot z okolí počítaného pixelu. [3] Segmentace obrazu Segmentace obrazu je základní krokem při analýze obrazu. Je to proces, při kterém by měli být vymezeny plochy obrazu zastupující různé předměty či objekty. V podstatě se jedná o rozdělení obrazu na soubor dílčích oblastí, které jsou disjunktní a pokrývají celou oblast obrazu. Neexistuje žádný jednotný přístup k dosažení co nejlepší segmentace ani optimální segmentace pro většinu praktických příkladů. Je to důsledek vysoké variability úkolů analýzy obrazu. [2] Existuje několik metod pro segmentaci obrazu, některé metody lze použít i vícekrát či v kombinaci. Některé metody jsou používány globálně pro celý obraz, u jiných je lepší lokální aplikace pro segmentaci. Nejčastěji se segmentuje podle intenzity obrazu, ale obraz se může rozdělovat i podle jiných parametrů. [2] Prahování Prahování se skládá ze segmentace obrazu podle jeho intenzity na části oblastí a pozadí. Tento proces funguje nastavením na hodnotu 1 všech pixelů, které patří do prahem vybraného intervalu, nastavení všech ostatních bodů v obrazu je do hodnoty 0. V případě šedotónového obrazu, prahování převádí obraz s hodnotami pixelů od 0 až 255 ve stupních šedi, na obraz binární s pixelovými hodnotami 0 nebo 1 (obrázek ). [3] ~ 29 ~
 (b) (c) (d) Obrázek 2.4.5.")
 výsledný obraz po nastavení intervalu <B,C> vyznačených v obrázku d, (d) histogram originálního šedotónového obrazu a vyznačení")
31 Segmentovat barevný obraz pomocí metody prahování lze při rozdělení RGB (barevného) obrazu na jednotlivé složky R (červená), G (zelená) a B (modrá). Tudíž samotná segmentace probíhá pro každou barevnou složku zvlášť. Platí i pro jiné barevné systémy, např. HSV, HSL a tak podobně. [2, 3] (a) (b) (c) (d) Obrázek : Segmentace obrazu prahováním: (a) originální šedotónový obraz, kterému odpovídá histogram na obrázku d, (b) výsledný obraz po prahování, hodnota intervalu pro nastavení prahu a následné přepsání příslušných pixelů je vyznačena na obrázku d intervalem <B,D>, (c) výsledný obraz po nastavení intervalu <B,C> vyznačených v obrázku d, (d) histogram originálního šedotónového obrazu a vyznačení příslušných intervalů. [Generováno vlastním programem v LabView] Prahování lze nastavovat ručně či automatickými metodami. Není nutné rozdělovat obraz pouze na dvě hodnoty, ale je možno použít takzvané multiprahování, kde není jenom černá a bílá složka tedy hodnoty 0 a 1, ale i hodnoty další (záleží na zvoleném počtu rozdělení obrazu). [3] ~ 30 ~
. (a) (b) Obrázek 2.4.5.")
![2: Aplikace metody rozvodí: (a) originální obraz, (b) výsledek segmentace metodou rozvodí. [2] Princip této metody vychází z jejího názvu.](/docs-images/73/68133488/images/32-1.jpg "Segmentaci, která probíhá pomocí náročných výpočetních operací, lze přirovnat k simulaci povodně, to znamená, že oblasti s nejmenší intenzitou jasu (v tomto případě údolí), jsou zatopovány vodou.")
32 Metoda rozvodí Segmentace typu rozvodí je na hranici mezi regionově a hranově orientovanou metodou. Parametrický obraz je chápán jako reliéf, v němž pohoří odpovídají hranicím oblastí (nejčastěji jasová hodnota). (a) (b) Obrázek : Aplikace metody rozvodí: (a) originální obraz, (b) výsledek segmentace metodou rozvodí. [2] Princip této metody vychází z jejího názvu. Segmentaci, která probíhá pomocí náročných výpočetních operací, lze přirovnat k simulaci povodně, to znamená, že oblasti s nejmenší intenzitou jasu (v tomto případě údolí), jsou zatopovány vodou. Jsou spojovány sousedící oblasti s pixely, které k dané oblasti přiléhají, pokud je v blízkém okolí více různých pixelů, tak je označeno jako hrana. Povodí je oblast příslušející lokálnímu minimu, k němuž bude směřovat tok kapek. Rozvodí je hranice segmentů. Příklad metody je zobrazen na obrázku [2] Binární morfologie Binární a morfologické operace extrahují a mění strukturu částic v binárním obraze. Binární obraz je obraz obsahující části oblastí s pixelovými hodnotami 1 a pozadí oblastí, které má hodnotu pixelů 0. Binární obraz je výsledkem prahování a vzhledem k tomu, že prahování je subjektivní proces, může výsledný binární obraz obsahovat nežádoucí informace jako je šum, objekty navzájem se dotýkající, objekty dotýkající se okrajů obrazů a objekty, které nemají zarovnané hrany. Použitím správné morfologické funkce lze tyto nežádoucí jevy odstranit či zmírnit a tím zpřesnit informace v binárním obraze pro další zpracování jako je například počítání obsahu objektů, obvodu a tak podobně. Základní morfologické operace jsou eroze a dilatace. Z kombinace těchto dvou operátorů mohou být odvozeny další operace jako otevření, uzavření a podobně. [2, 3] ~ 31 ~
33 Maska Morfologické operátory, které mění obrazec upravovaného pixelu na základě čísel a hodnot jeho sousedů. Soused je pixel, jehož hodnota má vliv na hodnoty blízkých pixelů při některých funkcích pro zpracování obrazu. K morfologické transformaci se používá 2D binární maska, která se také označuje jako strukturní element, který definuje velikost a vliv okolí na každý pixel a řídící vliv binární morfologické funkce na tvar a hranice částic. Použití masky se aplikuje v každém případě binární morfologické operace.[3] Velikostí a obsahem masky lze specifikovat, které pixely morfologické operace se berou v úvahu, tedy vliv okolí pixelu, při určování nových hodnot zpracovávaného pixelu. Maska musí být o velikosti lichého počtu pixelů každé strany, aby bylo možné určit centrální pixel, jehož hodnota je přepočítávána. Obsah masky je vždy binární a nejběžnější velikosti 3 x 3. Celkem tři faktory ovlivňují masku, která definuje přepočítávání pixelů v průběhu morfologické transformace a je to velikost masky, hodnoty částí masky a pixelový tvar masky. [3] Velikost masky Velikost masky určuje velikost okolí v okolí zpracovávaného pixelu a souřadnice tohoto pixelu jsou určeny jako funkce strukturování prvku. Takže souřadnice těchto bodů budou (1,1), (2,2) a (3,3) pro masky velikosti 3 x 3, 5 x 5 a 7 x 7, jelikož se jako výchozí bod (0,0) označuje levý horní roh (obrázek a). Důležité je brát v potaz okolí zpracovávaného pixelu, například pro zpracování jednoho pixelu maskou o velikosti 3 x 3 je nezbytná přítomnost okolních pixelů, tedy jednoho pixelu v každém směru od zpracovávaného pixelu, což je celkem minimálně 9 pixelů (3 x 3). Velikost masky také ovlivňuje rychlost morfologické transformace. Čím menší je maska, tím rychlejší je transformace. [3] Obrázek a: Příklady nejběžnějších velikostí masek. [3] Hodnota masky Binární hodnoty prvků v masce určují, který pixel z okolí bude mít vliv na výslednou hodnotu transformovaného pixelu. Pokud je prvek v masce nastaven na hodnotu jedna, tak má příslušný pixel vliv na výslednou hodnotu, případně při nastavené hodnotě 0 nemá daný pixel vliv na výsledek transformace pixelu (obrázek b). [3] ~ 32 ~
![Obrázek 2.4.6.1b: Příklad vlivu hodnoty masky. [3] Pixelový tvar masky Digitální obraz je 2D pole obrazových bodů uspořádaných do pravoúhlé sítě.](/docs-images/73/68133488/images/34-1.jpg "Morfologické transformace umožňují zpracovávat pixely buď ve čtvercové (square) nebo šestihranné (hexagonal) konfiguraci čím se zavedl pojem pixelový tvar masky (nebo pixelový tvar rámečku).")
34 Obrázek b: Příklad vlivu hodnoty masky. [3] Pixelový tvar masky Digitální obraz je 2D pole obrazových bodů uspořádaných do pravoúhlé sítě. Morfologické transformace umožňují zpracovávat pixely buď ve čtvercové (square) nebo šestihranné (hexagonal) konfiguraci čím se zavedl pojem pixelový tvar masky (nebo pixelový tvar rámečku). Pixelový tvar masky může být buď v rovině (square) nebo posunutý (hexagonal) a má za následek změnu vlivu okolí na transformovaný pixel (obrázek c). Pro hexagonální tvar masky má vliv okolí u velikosti masky 3 x 3 pouze šesti okolních pixelů oproti osmi pixelům z okolí při čtvercovém tvaru masky. [3] (a) (b) (c) (d) Obrázek c: Vliv pixelového tvaru masky na vliv okolí transformovaného pixelu: (a) čtvercová maska 3 x 3, (b) šestihranná maska 3 x 3, (c) čtvercová maska 5 x 5, (d) šestihranná maska 5 x 5. [3] Konektivita Konektivita neboli spojitost určuje způsob, jakým jsou dva sousedící pixely klasifikovány jako spojené či nikoliv. Spojitosti se využívá například při vykreslování hran a následnému určovaní zdali jsou blízké hrany spojené či se jedná o dva různé objekty. Používají se dva druhy konektivity. Prvním je konektivita-4, která zařazuje dva sousední pixely do stejného objektu, pokud se dotýkají podél přilehlé hrany. Druhým je konektivita-8, která řadí dva sousední pixely do jednoho objektu, pokud se dotýkají alespoň rohem (obrázek ). [2, 3] ~ 33 ~
![(a) (b) Obrázek 2.4.6.2: Grafické znázornění vztahu sousedních pixelů pro typy konektivity: (a) konektivita-4, (b) konektivita-8. [3] 2.4.6.3 Základní morfologické operace Primární morfologické operace pracují s binárními obrazy.](/docs-images/73/68133488/images/35-0.jpg "Každý pixel je nastaven buď na hodnotu 1 nebo hodnotu 0 v závislosti na informacích z okolí a typu použité operace. Tyto operace vždy mění celkovou velikost a tvar oblastí v obraze.")
35 (a) (b) Obrázek : Grafické znázornění vztahu sousedních pixelů pro typy konektivity: (a) konektivita-4, (b) konektivita-8. [3] Základní morfologické operace Primární morfologické operace pracují s binárními obrazy. Každý pixel je nastaven buď na hodnotu 1 nebo hodnotu 0 v závislosti na informacích z okolí a typu použité operace. Tyto operace vždy mění celkovou velikost a tvar oblastí v obraze. Používají se pro vyhlazení, rozšíření či omezení a hledání vnější či vnitřní hranice objektů, i kvůli přípravě na další zpracování. Příklady vybraných funkcí jsou zobrazeny na obrázek d. Eroze Eroze eliminuje pixely, které jsou izolovány v pozadí, a narušuje obrys objektů podle šablony definované maskou. Jedná se o funkci průniku. Pokud má obraz pod centrálním pixelem hodnotu 1 ( uvažuje se maska přiložená na obraz ) a dále všechny hodnoty obrazu, které leží pod elementy masky nastavené do hodnoty 1, pak zůstane výsledná hodnota pod centrálním pixelem na hodnotě 1, v každém jiném případě bude přepočítávaný pixel nastaven na hodnotu 0. Pro snazší znázornění slouží obrázek a. [3] Dilatace Dilatace eliminuje malé dírky v izolovaných objektech a rozšiřuje obrysy objektů podle zadané masky. Tato funkce má opačný účinek než eroze, protože dilatace je ekvivalentní k narušení pozadí. Jedná se o funkci sjednocení. Pokud je prvek hodnoty 1 z obrazu překrývající se s maskou, alespoň v jednom bodě hodnoty také 1, pak je centrální element masky nastaven na hodnotu 1 (obrázek a). [3] Otevření a uzavření Funkce otevření je eroze následovaná dilatací, což má za následek odstranění malých objektů a vyhlazení hranic objektů. Tato operace nemění výrazně plochu a tvar objektů, protože eroze a dilatace jsou duální transformace, ve kterých jsou hranice odstraněny erozí a obnoveny dilatací. [3] Funkce uzavření je dilatace následovaná erozí. Tato funkce vyplní drobné otvory a vyhlazuje hranice. Operace opět výrazně nemění plochu ani tvar objektů. [3] ~ 34 ~
 originální obraz, (b, c) typ použitých masek, (d) výsledek eroze s maskou b, (e)")
 a Gradient out (vnější hrana).")
, kde O je originální obraz.")
 podle rovnice (20), kde O je originální obraz.")
![( ) ( ) ( ( )) (20) Hit-miss V jiné literatuře ([2]) je tato transformace označována též jako fit-and-miss.](/docs-images/73/68133488/images/36-4.jpg "Hit-miss (hledání děr) už podle názvu značí svoji funkci, pomocí které lze vyhledávat různé konfigurace pixelů.")
36 (a) (b) (c) (d) (e) (f) (g) Obrázek a: Aplikace morfologických operací: (a) originální obraz, (b, c) typ použitých masek, (d) výsledek eroze s maskou b, (e) výsledek eroze s maskou c, (f) výsledek dilatace s maskou b, (g) výsledek dilatace s maskou c. [3] Gradient in a Gradient out Gradient in (vnitřní hrana) a Gradient out (vnější hrana). Pro definici vnitřní hrany objektu dochází k odečtení erodovaných hran od zdrojového obrazu, kterou popisuje následují rovnice (19), kde O je originální obraz. ( ) ( ) ( ( )) (19) Pro definici vnějších hran dochází naopak k odečtení zdrojového obrazu od dilatovaných hran, což má za následek zvětšení objektů (tedy jejich hranic) podle rovnice (20), kde O je originální obraz. ( ) ( ) ( ( )) (20) Hit-miss V jiné literatuře ([2]) je tato transformace označována též jako fit-and-miss. Hit-miss (hledání děr) už podle názvu značí svoji funkci, pomocí které lze vyhledávat různé konfigurace pixelů. V závislosti na nastavení vyhledávací masky, lze vyhledávat od jednotlivých izolovaných pixelů, přes tvar nebo podélné vzory, pravé úhly na okrajích objektů až po nejrůznější požadavky uživatele. Samotná transformace funguje tak, že se zadaná maska aplikuje na ~ 35 ~
37 všechny pixely v obraze, pokud maska souhlasí se zdrojovým obrazem, pak je centrální prvek masky vyznačen do obrazu hodnotou 1, v každém ostatním případě bude centrální pixel pod maskou nastaven do hodnoty 0 (obrázek b). Alternativní definice vyjadřuje fit-andmiss transformaci jako průsečíku příslušných erozí. [2, 3] (a) (b) (c) (d) (e) Obrázek b: Aplikace funkce hit-miss: (a) originální obraz, (b-e) aplikace vyhledávací masky (nahoře) a výsledek vyhledávání (dole). [3] Thinning Thinning (ředicí) funkce podobně jako hit-miss pracuje na principu vyhledávání pomocí definované masky s tím rozdílem, že pokud je testovaná část obrazu shodná se zadanou maskou, tak dochází k nastavení centrálního prvku pod maskou na hodnotu 0, v každém jiném případě, zůstává zachován původní obraz (obrázek c). Používá se na odstranění jednotlivých izolovaných bodů a pravých úhlů v obraze. Tuto funkci lze vyjádřit jako rovnici (21), kde O je originální obraz. [3] ( ) ( ) ( ( )) (21) Thickening Thickening (zhušťovací) funkce pracuje také na principu vyhledávání v obraze pomocí zadané masky. Pokud testovaný obraz odpovídá zadané masce, tak je centrální prvek pod maskou nastaven na hodnotu 1, v každém jiném případě zůstane výsledný obraz beze změny (obrázek c). Používá se k vyplnění děr v obraze a k zarovnávání hran do pravých úhlů. Lze vyjádřit jako rovnici (22), kde O je originální obraz. [3] ( ) ( ) ( ( )) (22) ~ 36 ~
38 (a) (b) (c) (d) (e) Obrázek c: Aplikace funkce thinning a thickening: (a) originál, (b-c) aplikace vyhledávací masky (nahoře) a výsledek thinning funkce (dole), (d-e) aplikace vyhledávací masky (nahoře) a výsledek thickening funkce (dole). [3] Řádné otevření a řádné uzavření Funkce řádné otevření je konečná a duální kombinace funkcí otevření a uzavření. Odstraňuje malé částice a vyhlazuje kontury částic. Jestliže je na zdrojový obraz aplikována funkce řádné otevření, tak výsledkem je průnik zdrojového obrazu a jeho transformace, která vznikla aplikací funkce otevření, po němž následuje uzavření a pak následuje další otevření, popsané v rovnici (23), kde Z je zdrojový obraz, O značí otevření, C uzavření, E eroze a D dilatace. [3] ( ) ( ( )) ( ( )) (23) ( ) ( ( )) ( ( )) (24) Funkce řádné uzavření sjednocuje zdrojový obraz s jeho transformací, která vznikla aplikací funkce uzavření následovaná funkcí otevření a uzavření podle rovnice (24). Řádné uzavření odstraňuje malé otvory a vyhlazuje vnitřní obrys objektů v obraze. [3] Auto-medián Tato funkce aplikuje dvojí kombinaci otevření a uzavření, což má za následek vytvoření jednodušších částic, které obsahují méně detailů. Funkce a posloupnost dílčích funkcí je znázorněna v následující rovnici (25), kde jsou proměnné stejného významu jako v rovnici (23, 24). [3] ( ) ( ( ) ( )) ( ( ) ( )) Pokročilé morfologické operace Některé z níže popsaných morfologických operací jsou specifické pouze pro určité aplikace. Z tohoto důvodu je těžké dané operace deklarovat pro obecné širší použití v morfologii. Proto ~ 37 ~
![zde dále budou popsány tyto operace z hlediska možnosti využití a návrhu vytvářeného programu pro zpracování mikroskopického obrazu, podle literatury ([3]).](/docs-images/73/68133488/images/39-0.jpg "Pokročilé morfologické operace jsou postaveny na základních morfologických operacích a jsou určeny pro přímou práci s objekty a oblastmi nikoliv jednotlivými pixely.")
39 zde dále budou popsány tyto operace z hlediska možnosti využití a návrhu vytvářeného programu pro zpracování mikroskopického obrazu, podle literatury ([3]). Pokročilé morfologické operace jsou postaveny na základních morfologických operacích a jsou určeny pro přímou práci s objekty a oblastmi nikoliv jednotlivými pixely. Každá z těchto operací byla vyvinuta na konkrétní operace s objekty v binárním obraze. Používá se například na vyplnění děr v objektech, odstranění objektů, které se dotýkají okrajů obrazu, odstranění nežádoucích objektů a další. [3] Hraniční funkce Hraniční (border) funkce odstraňuje objekty, které se dotýkají okrajů obrazu. Tudíž nemají uzavřené hranice, protože jsou přerušeny okrajem snímku. Toto odstranění pomůže, aby se předešlo chybnému měření nekompletních objektů v obraze. Princip této funkce spočítá v testování okrajových (=okraj obrazu) pixelů, pokud je detekována 1, tedy objekt, pak je daný pixel nulován s celou oblastí, která podle zadané konektivity s detekovaným pixelem váže celou oblast hodnot 1, tedy celý objekt, jehož součástí je i testovaný pixel. [3] (a) (b) (c) (d) (e) (f) Obrázek d: Příklad aplikace vybraných funkcí: (a) originální obraz, (b) eroze, (c) dilatace, (d) otevření, (e) uzavření, (f) gradient in, (g) gradient out, (h) řádné otevření, (ch) řádné uzavření, (i) auto-medián. [Generováno vlastním programem v LabView] ~ 38 ~

40 (g) (h) (ch) (i) Obrázek d: (Pokračování). Plnící funkce Plnící (hole filling) funkce odstraňuje oblast děr, které jsou v uzavřených objektech. Pokud oblast děr navazuje podle zadané konektivity na oblasti téže hodnoty 0, které se dotýkají okrajů snímku, pak se nejedná o uzavřený objekt a díru nelze přepsat na hodnotu objektu. [3] Označovací funkce Označovací (labeling) funkce přiřadí každému objektu jinou úroveň šedi, tudíž výsledkem není binární obraz, ale obraz šedotónový. Počet výsledných úrovní šedi se rovná počtu objektů v obraze. Oblast děr má stejnou šedotónovou hodnotu 0. Systém přiřazování hodnot postupuje od nejnižších hodnot až k hodnotě 255, pokud je v obraze více než 255 objektů, tak objekty následující po objektu 255 budou mít stejnou hodnotu úrovně šedi jako tento objekt. [3] Filtr dolní a horní propust Dolní propust (lowpass) odstraňuje malé objekty z obrazu podle definované velikosti N filtru, jejichž šířka je menší nebo rovna (N-1) pixelů. Také vyjádřeno jako (N-1) / 2 eroze. Horní propust (highpass) odstraňuje velké objekty z obrazu podle definované velikosti N filtru, jejichž šířka je větší nebo rovna N pixelů. Také vyjádřeno jako (N / 2 + 1) eroze. [3] ~ 39 ~

41 Skeleton Tato operace patří mezi známé běžně používané morfologické operace. Funkce používá k výpočtu primární morfologickou operaci thinning (ředění) uvedenou v kapitole , tato operace se aplikuje v posloupnosti, dokud se šířka každého objektu v obraze nerovná 1 pixel. Výsledek si lze představit jako hřebeny distanční mapy objektů. Hledání skeletonu (kostry) objektů v obraze je časově a paměťově náročné. Pro různé konfigurace strukturovacího prvku požívá funkce skeleton podmíněné aplikace thinning a otevření. Strukturovací prvek má následující hodnoty pro L-skeleton (25a), pro M-skeleton (25b) a pro Skiz platí inverzní kostra, tedy aplikace L-skeletonu na inverzní obraz (obrázek a). Výsledek aplikace Skiz struktury pro funkci skeleton, lze také prezentovat jako určení hranice mezi objekty, která má k odpovídajícím objektům stejnou vzdálenost. [3] [ ] [ ] (a) (b) (25) (a) (b) (c) (d) Obrázek a: Aplikace funkce skeleton: (a) originální obraz, (b) L-skeleton, (c) M-Skeleton, (d) Skiz. [Generováno vlastním programem v LabView] ~ 40 ~

.")
![Liší se pouze v algoritmu výpočtu vzdálenostní mapy, který je mnohem složitější, ale přesnější. [3] Funkce kruhů Kruhová (circle) funkce umožňuje detekovat kruhové objekty, které se překrývají.](/docs-images/73/68133488/images/42-2.jpg "Využívá k tomu funkce Danielsson pro rekonstrukci obrazu za předpokladu, že jsou objekty v podstatě kruhové.")
42 Funkce vzdálenosti Vzdálenostní (distance) funkce vytváří vzdálenostní mapy objektu pomocí tvoření šedotónových vrstevnic, tedy spojováním míst se stejnou vzdáleností. Určování vzdálenosti probíhá od okraje směrem ke středu objektu. Výsledkem je šedotónový obraz o úrovních šedi 0-255, který začíná hodnotou 1 (tmavé hranice objektu) a končí hodnotou až 255 (tedy světlý střed objektu), (obrázek b). [3] Danielsson Danielsson je funkce, která má podobný výsledek a funkci jako funkce vzdálenosti (distance). Liší se pouze v algoritmu výpočtu vzdálenostní mapy, který je mnohem složitější, ale přesnější. [3] Funkce kruhů Kruhová (circle) funkce umožňuje detekovat kruhové objekty, které se překrývají. Využívá k tomu funkce Danielsson pro rekonstrukci obrazu za předpokladu, že jsou objekty v podstatě kruhové. Objekty jsou považovány jako soubor vzájemně se překrývajících disků, které jsou rozděleny na samostatné disky (obrázek b). [3] (a) (b) (c) Obrázek b: Příklad aplikace vybraných funkcí: (a) originální obraz, (b) vzdálenostní funkce (v binárním zobrazení), (c) kruhová funkce. [Generováno vlastním programem v LabView] Poznámka: V obrázku b(b) je zobrazená vzdálenostní funkce, která byla popsána výše jako výstupní obraz ve stupních šedi, avšak v tomto obrázku je zobrazena v binárním zobrazení. Zmiňovaný obrázek je ilustrativní, a kdyby byl zobrazen v úrovních šedi, kde dosahuje převážně hodnot 1-20, tak by daný obrázek nebyl dostatečně názorný, takto můžeme zřetelně rozeznat i jednotlivé vzdálenostní vrstevnice. ~ 41 ~
43 Convex Hull Funkce se používá pro uzavírání částic. Princip spočívá v počítání konvexní obálky kolem každého objektu, která daný objekt uzavře. Použití je vhodné na objekty kulovitého tvaru, kde lze předpokládat, že uzavření na celistvý kulovitý objekt je žádoucí. [3] ~ 42 ~
44 3 Mikroskopy Tato kapitola bude věnována mikroskopům, ale jenom co se týče jejich základních informací, protože s mikroskopem se pracovat nebude, bude se pouze zpracovávat obraz na jeho výstupu. U mikroskopů je důležité světlo a to z toho důvodu, aby byla zachována věrnost barev pozorovaného obrazu. Světlo, které dopadá na snímaný objekt či se z něho odráží nebo jím prochází, podle systému mikroskopu, je čočkami ohýbáno a v podstatě rozkládáno na jednotlivé barevné složky světla, ale dnes jsou téměř všechny světelné mikroskopy vybaveny halogenovou žárovkou, která slouží pro všeobecné použití nebo jako doplněk světla. Širokým rozsahem optických kontrastních metod může být řízen s tímto typem světelného zdroje, zahrnujícím všechny vlnové délky ve viditelné části spektra. Také jsou mikroskopy vybavené světelnými filtry, které dále upravují viditelnou část spektra. Existují i jiné zdroje světla, které jsou určené pro konkrétní rozsah vlnových délek či pro speciální snímání obrazu. [4] Věrnost obrazu a barev závisí nejenom na průchodu světla mikroskopem. Protože v oblasti mikroskopie se používají digitální kamery pro získání černobílého či barevného obrazu. Převod viditelného spektra vlnění na elektrický signál může obraz značně ovlivnit. Detekce světla je pro černobílé i barevné kamery stejná. Při předpokladu správné optiky objektivu kamery bude mít hlavní vliv CCD (Charged Coupled Device = snímací zařízení) čip. Tento polovodičový prvek převádí dopadající fotony na elektrické napětí. Rozlišení jednotlivých barev při detekci světla je docíleno pomocí barevné mřížky, která slouží jako filtr a propouští určeným bodem pouze jednu barevnou složku světla, buď modrou, červenou anebo zelenou. Počet zelených detekcí je stejně jako modrých a červených dohromady (na čtyři body filtru připadají dva zelené body a po jednom červeném a modrém). Vyhodnocení informací z CCD čipu prochází složitými algoritmy. Typ CCD čipu určuje bitovou hloubku obrazu (jednoho detekovaného bodu), standardně je to 8 bitů, dnes až 16 bitů, a také určuje rozlišení obrazu (počet detekovaných bodů) v dnešní době kolem 12,5 milionu pixelů. [4] Na obraz snímaný kamerou má také vliv okolního osvětlení, které ovlivňuje zabarvení obrazu. Zabarvení obrazu lze upravit pomocí korekce barev, která se provádí pomocí šedotónového obrazu a určením referenčního bodu barvy. Nicméně při převodu mezi jednotlivými barevnými systémy dochází k chybám, které ovlivňují výsledný obraz, a pro různé systémy bude shodný obraz vypadat odlišně, to je nutné brát v potaz pro zvážit pro konkrétní aplikaci. [4] Nejnovější moderní mikroskopy využívají techniky fluorescence, která se používá převážně v biologické oblasti. Používá se pro vyšší hranici rozlišovací schopnosti v mikroskopii. Fluorescenční jev je vybuzen modrým světle dopadajícím na buňku, výsledkem je zelené ~ 43 ~
45 světlo, které buňka vyzařuje. Buňka má vlastní fluorescenční schopnost anebo je to způsobeno přidáním speciální chemické směsi. [4] Také existují mikroskopy, které pracují s více rozměrnými objekty, například 3D obrazy snímané ze dvou bodů nebo 3D obrazy rekonstrukcí z elektronové tomografie (TEM). [4] Dále se mikroskopie zabývá zpracováním obrazu, kterému jsme se věnovali v kapitole 2, jako je ostření, zvýšení kontrastu, úpravy histogramu, odstranění šumu, subjektivnímu vnímání obrazu a tak podobně. [4] Výsledkem těchto poznatků lze jenom potvrdit, že vnímaní a zpracování obrazu jako takového je čistě na uživateli, protože stále platí, že obraz je vnímán subjektivně. Lze se pouze držet doporučených postupů. ~ 44 ~
46 4 LabView 4.1 Úvod Podle zadání byl navrhnut systém pro získání, zpracování a analýzu obrazu, počítání a rozměřování objektů. Tento návrh byl zaměřen pro praktické použití a jednoduché ovládání pro uživatele. Níže je realizovaný systém dopodrobna popsán, rozebrán a vysvětlen i s názornými ukázkami výsledků. K řešení zadaného problému byla využita především literatura [5] a help programu LabView O programu LabView LabView je zkratka pro Laboratory Virtual Instrumentation Engineering Workbench (=virtuální laboratorní nástroj technického ovládacího panelu). Je to platforma a vývojové prostředí pro vizuální programovací jazyk od společnosti National Instruments. Cílem těchto programů je automatizace zpracování a využití měřícího zařízení v jakémkoliv laboratorním nastavení Obecný návrh programu Zdrojová data jsou načtena volitelně ze souboru nebo z připojené kamery v obrazové podobě, tedy jako 2D diskrétní signál. Vybraný obraz může být načítán jako barevný nebo šedotónový, podle volby uživatele a zaměření úprav. Úpravy jsou možné například pomocí filtrů, které obraz zaostřují či případně vhodnou aplikací odstraňují šum. Dále je možná ekvalizace histogramu a další podobné úpravy, které zlepšují vizuální dojem. Následuje aplikace segmentačních metod, kde se filtrují jednotlivé barevné složky, aplikuje se možnost prahování a to volitelně podle manuálního nastavení nebo je i zároveň možné využít některý automatický segmentační systém s nastaveným prahem. Po segmentaci, pomocí které se převede obraz na binární podobu, jsou k dispozici různé morfologické úpravy. Morfologické transformace pomohou k lepší identifikaci a původnímu tvaru jednotlivých objektů, v našem případě buněk. V konečné fázi zpracování dochází k aplikaci výpočetních technik na vhodně upravený obraz, kterými se počítá například obsah buněk, jejich rozmístění, průměry a tak podobně. Navrhovaný systém je nastíněn na obrázku V blokovém schématu jsou také nastíněny možnosti programových operací, čímž se má namysli například oříznutí či převzorkování zpracovávaného obrazu. 4.2 Kostra programu Kostrou programu se myslí základ, který je společný pro celý program bez ohledu na právě prováděnou operaci. ~ 45 ~
.")
47 Výstupní obraz Z kamery Ze souboru Načtení obrazu Barevný obraz Šedotónový obraz Úpravy obrazu Úpravy obrazu Segmentace Segmentace Binární obraz Morfologické operace Analýza Programové operace Obrázek 4.1.2: Základní blokové schéma programu Programová smyčka Program je spuštěn ve While smyčce, která stále běží, dokud není splněna podmínka pro ukončení (obrázek 4.2). Tato programová smyčka běží po celou dobu spuštění programu. Obrázek 4.2: Základní konstrukce programu: (1) While smyčka, (2) obrazové smyčky, (3) Event struktura, (4) deklarace globálních proměnných (vlastností objektů), (5) zobrazovací okna obrazových smyček. [Schéma vlastního programu] Obrazová smyčka Při původním návrhu programu byly navrženy tři obrazové smyčky, jedna pro šedotónový obraz, druhá pro binární obraz a třetí jako resetovací pro zálohu původního snímku. Se zařazením další obrazové smyčky a to barevné se ukázalo dané řešení jako nevhodné (vznikla ~ 46 ~
48 by ještě zvláštní resetovací smyčka pro barevný obraz), proto bylo jádro programu přepracováno. Nyní jsou použity pouze tři obrazové smyčky pro všechny druhy obrazu (barevný, šedotónový i binární). Z toho jsou dvě smyčky (Zdrojový obraz a Upravený obraz) kontinuálně zobrazovány uživateli pomocí zobrazovacích oken, které jsou k daným smyčkám připojeny. Zdrojový obraz slouží už podle názvu jako výchozí data pro volitelnou aplikaci. Aplikované úpravy se také kontinuálně zobrazují uživateli ve smyčce Upravený obraz Událostní smyčka Dalším stěžejním bodem v konstrukci programu je Event smyčka, která je vyznačena na obrázku 4.2. Tato smyčka je událostní, tudíž reaguje na zadané parametry, například stisk tlačítka, který je vyvolán uživatelem. Pokud není indikován žádný podmět ke spuštění příslušného okna Event struktury, tak se neprovádí žádná úloha a program vyčkává. V případě tohoto programu Event smyčka obsahuje celkem 38 událostních struktur (oken), ve kterých jsou definovány jednotlivé operace pro příslušné aplikace vyvolané z uživatelského prostředí Proměnné Neméně důležitou součástí tohoto programu jsou proměnné, tedy přesněji vlastnosti jednotlivých objektů a prvků, jejichž pomocí je tento program velkou měrou usměrňován Prevence Jsou dva způsoby jak ošetřovat chyby programu. Prvním z nich je řešit nastalé komplikace v chybných stavech a programově se s těmito stavy vypořádat. Tento program byl navržen druhým způsobem, který je snahou chybám předcházet dříve než nastanou či zamezit jejich vzniku. Proto dochází k masivnímu použití nadefinování vlastností všech dostupných zobrazovaných objektů z uživatelského prostředí. Jako příklad můžeme uvést použití morfologických operací na barevný obraz, které není programově možné (neexistuje nadefinovaná funkce pro morfologické zpracování barevného obrazu), ale uživatel danou problematiku nemusí znát. Z tohoto důvodu zamezíme přístupu k morfologickým operacím při práci s barevným obrazem. Seznam dostupných operací pro různé obrazy je definován v tabulce Použité proměnné Dvě hlavní vlastnosti objektů používané v programu jsou Visible (viditelnost) a Disabled (není povoleno). Vlastnost Visible může nabývat logické hodnoty True (pravda) a False (nepravda), tedy definujeme hodnoty kdy je objekt, k němuž daná vlastnost přísluší, viditelný nebo naopak není vidět. Vlastnost Disabled definujeme hodnotami 0 = povoleno, 1 = není povoleno a 2 = není povoleno a je šedé. V programu jsou použité pouze hodnoty 0 a 2. Výhoda takto používaných vlastností objektů je nejen v zamezení přístupu k nežádoucím úpravám, ale následně plynoucí navigace uživatele k aplikacím, které lze použít. Například při spuštění programu jsou uživateli dostupná pouze tlačítka k načtení obrazu, protože žádné jiné ~ 47 ~
49 funkce nejsou v tuto chvíli žádoucí. Obecně by stačilo použít všude jednu z výše zmiňovaných vlastností, ale pokud bychom všude použili vlastnost Visible, tak by uživatel nejspíše ztrácel přehled v možných aplikacích, protože by je ani nikde neviděl. Nyní možnou operaci vidí i přesto, že momentálně nedostupná (není povolená a je šedá). V případě použití pouze vlastnosti Disabled by došlo k větším nárokům používané plochy uživatelského prostředí, protože některé operace jsou pod stejným názvem (v podstatě i principem) aplikovány na různé obrazy. Například z uživatelského hlediska je tlačítko Ekvalizace použitelné pro barevný i šedotónový obraz, ve skutečnosti jde o dvě tlačítka, která jsou pomocí vlastnosti Visible mezi sebou přepínána. Dalším příkladem může být záložka Segmentace, kde je rozdílný uživatelský panel pro barevný a šedotónový obraz Aplikace Implementace a nastavování proměnných je zobrazeno na obrázku Z tohoto schématu je patrné, že při nastavování vlastností objektů je nutné pamatovat na to, který obraz je právě zpracováván. Globální (prvotní) nastavení proměnných je možné vidět na obrázku 4.2, kde jsou příslušné vlastnosti vně smyčky While, tudíž se aktivují pouze při prvotním spuštění programu. Hlavním výchozím bodem pro nastavení všech vlastností je načtení obrazu, které může proběhnout kdykoliv během používání programu. Další místa pro změnu nastavení proměnných je při přechodu mezi druhy obrazu, které je umožněno tlačítkem Aplikovat úpravu v kapitole Tento přechod je ošetřován ještě pomocnou proměnnou Numeric a Numeric 2, které slouží k identifikaci předchozí operace, aby nedošlo k chybnému přepsání vlastností. Globální podmínky Podmínky Podmínky Podmínky Načtení obrazu Barevný obraz Úpravy obrazu Segmentace Morfologie Analýza Aplikace prolnutí Barevný obraz Šedotónový obraz Binární obraz Šedotónový obraz Obrázek : Implementace a nastavování proměnných v programu. ~ 48 ~
50 Barevný systém Barevný systém Druh aplikace Barevně (RGB) Šedotónově Binárně Druh aplikace Barevně (RGB) Šedotónově Binárně Segmentace Úpravy obrazu Programové volby a úpravy Načtení Z kamery Ze souboru Morfologie Odstranění děr Odstranění okrajů Aplikovat úpravy Odstranění malých objektů Zpět zdroj Morfologické operace Vložit do originálu Vyplnění prohlubní Vyříznout Analýza Hledání Hledání kruhů Změnit rozměry Hledání hran Externí okno Kostra objektů Změna palety Řez obrazem Prolnutí Těžiště Negativ Počítání Analýza částic Mediánová filtrace Kvantifikace Ekvalizace Vzdálenost Konvoluce Nápověda LookUp nastavení Prahování Vysvětlivky: Automatické prahování je možné aplikovat danou úpravu Automatické lokální daná úprava je nevhodná či jinak prahování podmíněná Separace není možné aplikovat danou úpravu Rozvodí Tabulka 4: Seznam aplikací implementovaných v programu a jejich dostupnost pro různé systémy barev. Poznámka: V předchozí tabulce 4 dochází k rozporům v zařazení druhů aplikací do jednotlivých skupin oproti dříve naznačované teorii, například zařazení morfologických operací Kostra objektů a Hledání kruhů do skupiny Analýza a nikoliv ponechání ve skupině Morfologie. Tabulka je tvořena z pohledu uživatelského a jednotlivé skupiny odpovídají rozřazení aplikací do jednotlivých záložek ovládacího panelu. Takové členění z pohledu uživatele bude v této práci bráno jako výchozí pro další popis programu. ~ 49 ~

51 4.3 Načtení obrazu Načtení obrazu probíhá podle volby uživatele načtením ze souboru nebo z kamery, stiskem příslušného tlačítka. Zároveň dochází k výběru barevného systému, ve kterém bude obraz zpracováván Ze souboru Při stisku příslušného tlačítka pro načtení ze Souboru, dojde k aktivaci události ve smyčce Event. Nejprve se zobrazí dialogové okno v programově nastaveném umístění (c:\), dále je nastaven možný typ načítaného obrazu (jpg, jpeg, bmp, gif, png). Načítací člen načte obraz ze souboru do programu pod zadaným názvem a typem obrazu, který byl nastaven na jednotnou hodnotu 32-bitového RGB obrazu (obrázek 4.3.1). Následuje převod na uživatelem zvolený typ barevného systému (RGB/šedotónově). Podle volby dochází také k deklaraci podmínek podle kapitoly Výstupem jsou tři obrazové smyčky. První je definována jako Původní obraz, který je dále použit podle kapitoly Zbylé dvě obrazové smyčky jsou pro možnost úprav, více v kapitole Obrázek 4.3.1: Schéma zapojení: načítání ze souboru. [Schéma vlastního programu] Z kamery Princip načtení obrazu z kamery je podobný jako ze souboru. V záložce se nejprve uživatelsky vybere kamera, která je k dispozici (detekována programem LabView). Po stisku tlačítka Z kamery je načten pouze obrázek nikoliv kontinuální obraz, který by byl pro naši aplikaci momentálně nepotřebný. Sejmutí pouhého snímku bylo docíleno pomocí nastavení příslušných prvků kamery podle obrázku Obrázek 4.3.2: Schéma zapojení: načítání z kamery. [Schéma vlastního programu] ~ 50 ~
52 Další postup zpracování je shodný s předchozí událostí načtení Ze souboru (kapitola 4.3.1). 4.4 Úpravy obrazu Po načtení obrazu je žádoucí provést některé úpravy například pro zvýšení kontrastu, odstranění šumu, zvýraznění hran a tak podobně. Při návrhu systému bylo využíváno především poznatků z kapitoly 2.4 o úpravách šedotónového a barevného obrazu. Použití jednotlivých aplikací pro různé druhy obrazu je naznačeno v tabulce 4, podle které je možné použít tyto aplikace i na binární obraz. Ačkoliv je tato úprava nevhodná, tak není chybná, protože je nutné si uvědomit, že binární obraz je definován jako 8-bitový šedotónový obraz, který obsahuje pouze dvě úrovně stupňů šedi a to na nultém a prvním stupni. V zobrazení je následně použita binární paleta, kde jsou viditelné dvě kontrastní barvy zpravidla černá a v našem případě červená. Tak je definováno v tomto programovém prostředí LabView. Dílčí výsledky jednotlivých aplikací pro úpravu obrazu byly po řádné kontrole správnosti už představeny a prezentovány v kapitole 2.4 u příslušných podkapitol a označeny hranatými závorkami ([Generováno vlastním programem v LabView]) Negativ Aplikace je vytvořená pro úpravy šedotónového obrazu (obrázek 4.4.1). Negativ obrazu je vytvořen pomocí jednoho funkčního bloku, který funguje na principu převrácení LUT funkce (kapitola 2.4.2). Vstupním obrazem pro funkční blok je šedotónový obraz, výstupem je negativní obraz přivedený do obrazové smyčky Upravený obraz šedotónového obrazu. Možnost funkce negativu byla zvolena z toho důvodu, že některé buněčné obrazy jsou světlé objekty na tmavém pozadí a jindy naopak, a proto byla vytvořena volba negativu pro jednodušší aplikaci prahování. Obrázek 4.4.1: Schéma zapojení: negativ. [Schéma vlastního programu] Mediánová filtrace Aplikace je vytvořená pro úpravy šedotónového obrazu (obrázek 4.4.2). Aktivací události medián je spuštěna mediánová filtrace, která odstraní případné vysokofrekvenční rušení a detaily, které pro nejsou v některých případech zpracování obrazu žádoucí, aniž by byly narušeny hrany objektů. Podrobnější funkce mediánového filtru je ~ 51 ~
53 rozebrána v kapitole ). Mediánový filtr je vytvořen nastavením Nth Other filtru, byla zvolena maska o velikosti 3 x 3. Vstupem mediánového bloku je šedotónový obraz ze smyčky a filtrovaný výstup je přiveden na výstupní obrazovou smyčku. Obrázek 4.4.2: Schéma zapojení: medián. [Schéma vlastního programu] Ekvalizace Přesněji tedy ekvalizace histogramu byla navrhnuta jak pro úpravy šedotónového tak i barevného obrazu (obrázek 4.4.3). Tato aplikace byla navrhnuta kvůli zlepšení vizuálního dojmu z obrazu s ohledem na využití celé šíře histogramu a následně snazší aplikaci segmentačních postupů, které jsou popsané v kapitole 4.5. Podrobný princip ekvalizačního přizpůsobení je popsán v kapitole Možnost použití aplikace Ekvalizace na dva různé druhy barevných systémů spočívá v oddělení dvou různých bloků této funkce, kdy jedna je určena pro barevný obraz, případně lze přepnout (Luma / RGB, HSL), a druhá pro obraz šedotónový. Spuštění příslušné aplikace pro správný typ systému je ošetřen pomocí proměnných (kapitola 4.2.4). (a) (b) Obrázek 4.4.3: Schéma zapojení: ekvalizace: (a) pro šedotónový obraz, (b) pro barevný obraz. [Schéma vlastního programu] Konvoluce Konvoluce, pomocí které jsou aplikovány různé druhy filtru na obraz, je navržena pro úpravy šedotónového obrazu (obrázek 4.4.4). Po aktivaci události konvoluce dojde k samotné konvoluci šedotónového obrazu ze smyčky se zvoleným maskovým operátorem. Volitelnost maskových operátorů je široká a jejich celkový seznam a nastavení je v příloze 3. Vliv maskových operátorů je podrobněji rozepsán v teoretické části v kapitole a kapitole V programu lze volit typ filtru a ~ 52 ~
.")

54 velikost a typ maskového operátoru. Podoba maskového operátoru je uživateli pro kontrolu zobrazena. Obrázek 4.4.4: Schéma zapojení: konvoluce. [Schéma vlastního programu] LookUp nastavení Toto nastavování je implementováno na šedotónový a barevný obraz (obrázek 4.4.5). LookUp nastavením rozumějme změny hodnot jako jas, kontrast a gama korekce pro lepší vizuální vnímání. Při spuštění této události dochází uživatelem k manuálnímu nastavování hodnot jasu, kontrastu a gama korekce, podrobněji v kapitole a kapitole V případě šedotónového obrazu jde o nastavování jedné tabulky. Pro barevný obraz jsou to tabulky tři, kdy každá z nich představuje jas, kontrast a gama korekci pro jednu barevnou složku (červenou, zelenou a modrou). Ošetření pro nastavení správných tabulek pro příslušný barevný systém je ošetřen pomocí proměnných (kapitola 4.2.4). (a) (b) Obrázek 4.4.5: Schéma zapojení: LookUp nastavení: (a) pro šedotónový obraz, (b) pro barevný obraz. [Schéma vlastního programu] 4.5 Segmentace Segmentace obrazu, neboli třídění obrazu podle určitých společných vlastností (globálních nebo lokálních) je podrobně popsáno v kapitole ~ 53 ~

55 4.5.1 Prahování Prahování je podle kapitoly rozdělení obrazu podle jeho intenzit na části oblastí a pozadí, tudíž touto operací dochází k převodu různých (barevných i šedotónových) systémů barev na systém binární, tím dochází i ke změně zobrazované palety výsledného obrazu a to z šedotónového zobrazení na binární. Při této operaci je v programu přepsána hodnota pomocné proměnné Numeric, která indikuje převod systému na binární. Tato pomocná proměnná je dále použita pro aktivaci příslušných aplikací na zpracování binárního obrazu, viz kapitola o proměnných Manuální Manuální prahování je vytvořeno pro šedotónový a barevný obraz. Jedná se ruční nastavování prahu, kterým se vymezuje oblast dat, která bude převedena na hodnotu objektů. Nejjednodušší představa o intenzitách obrazu je pomocí histogramu. S tímto předpokladem byl navržen systém tak, že probíhá kontinuální zobrazování (=zapojeno přímo ve smyčce While mimo Event strukturu) příslušného histogramu (obrázek a), ve kterém uživatel posuvem dvou kurzorů přímo vyznačuje oblast prahování, tedy spodní a horní úroveň prahu. Polohy těchto kurzorů jsou snímány jako vstupní data pro prahovací hodnoty v konkrétní aplikaci Event struktury. Názorná ukázka kurzorů v histogramu je zobrazena na obrázku (d). Pro šedotónový obraz je zobrazován jeden histogram s příslušným výstupem pro nastavení prahů. Pro barevný obraz jsou zobrazeny tři histogramy, tedy pro každou barevnou složku zvlášť. Stejně tak i nastavování prahů se provádí pro každou složku zvlášť (obrázek b). Rozlišení druhu barevného systému probíhá podle nastavení tlačítka Barevně/Šedotónově při načítání souboru. Obrázek a: Schéma zapojení: histogramy pro barevný obraz. [Schéma vlastního programu] ~ 54 ~
56 Obrázek b: Schéma zapojení: manuální nastavování prahů pro barevný obraz. [Schéma vlastního programu] Automatické Bylo navrhnuto pro šedotónový systém (obrázek (a)). Tato aplikace byla navržena ke zjednodušení práce pro uživatele a také umožňuje využít programových možností různých metod prahování. Lze nastavit, jestli mají být segmentovány hodnoty nízké či vysoké úrovně šedi, tedy zda-li má aplikace detekovat tmavé či světlé objekty. Druhou možností nastavování jsou metody, kde lze zvolit metodu: Clustering-metoda shlukování, která je použita jako hraniční; Entropy-metoda entropie k detekci objektů, které jsou přítomné v nepatrných rozměrech v obraze; Metric-metrická metoda vypočítává optimální prahovou hodnotu pomocí plochy, kterou představují počáteční odstíny šedi; Moments-metoda momentů, vhodné pro obrazy se špatným kontrastem; Inter-class variancemetoda, která určuje optimální hranici mezi maximální a minimální hodnotou v obraze Automatické lokální Bylo navrženo pro šedotónový systém (obrázek (b)). Tato aplikace rozděluje obraz po částech tedy na lokální úrovni. Prahování na místní úrovni má výhodu například při nestejnoměrném osvětlení pozadí. Uživatel zvolí velikost detekčního okna, ve kterém se bude prahování provádět. Okno je samozřejmě postupně implementováno na celý obraz. Také lze jako v předchozím případě zvolit zda-li se mají detekovat tmavé či světlé objekty. Druhou volbou jsou metody: Niblack- vypočítává prahové hodnoty pro každý pixel na základě jeho lokálních statistik pomocí Niblack algoritmu; Background correctionmetoda korekce pozadí odstraní nejednotné světelné efekty v pozadí a poté provede prahování podle optimální hranice mezi maximální a minimální hodnotou v obraze. ~ 55 ~
![(a) (b) Obrázek 4.5.1.2: Schéma zapojení: aplikace prahování: (a) automatické, (b) automatické lokální. [Schéma vlastního programu] 4.5.2 Separace Aplikace funguje pouze pro barevný obraz a byla navržena s ohledem na možnost pracovat s obrazy z fluorescenčních mikroskopů.](/docs-images/73/68133488/images/57-0.jpg "V takovémto obraze většinou mívají různé buňky různé barvy. Při návrhu jsme postupovali tak, abychom mohli oddělit jednotlivé barvy, tedy různé druhy buněk, z celkového obrazu.")

57 (a) (b) Obrázek : Schéma zapojení: aplikace prahování: (a) automatické, (b) automatické lokální. [Schéma vlastního programu] Separace Aplikace funguje pouze pro barevný obraz a byla navržena s ohledem na možnost pracovat s obrazy z fluorescenčních mikroskopů. V takovémto obraze většinou mívají různé buňky různé barvy. Při návrhu jsme postupovali tak, abychom mohli oddělit jednotlivé barvy, tedy různé druhy buněk, z celkového obrazu. Princip této metody je zřetelný na obrázku 4.5.2a, kde je zobrazeno schéma zapojení. Obrázek 4.5.2a: Schéma zapojení: aplikace separace. [Schéma vlastního programu] Uživatel vybere jednu z možných složek barevných systémů. Barevné systémy, které jsou k dispozici RGB, HSL, HSV a HSI blíže popsané v kapitole můžeme tedy rozdělit na složky R (Red =červená), G (Green =zelená), B (Blue =modrá, H (Hue =odstín), S (Saturation =sytost), V (Value =hodnota), L (Lightness =světlost) a I (Intensity =intenzita). Uživatel má k dispozici celkem tři roviny pro nastavení jednotlivých složek, které může libovolně kombinovat. Tyto tři nastavitelné roviny jsou odeslány do bloku, který obraz z nastavených složek opět skládá dohromady. Vstupy tohoto skládacího bloku jsou nadefinovány tak, že první vytváří Red nebo Hue složku bez ohledu na to, která složka je tam poslána (uživatelem nastavena), druhá vytváří složku Green nebo Sat a třetí Blue nebo Luma nebo Val nebo Inten složku. Výsledný efekt je takový, že je možné zaměňovat barevné složky mezi sebou, ale hlavně lze zvýraznit například pouze jednu vybranou složku v obraze a to s využitím znalosti ~ 56 ~


 k separaci modrých částí z originálního")
 originální obraz (-buňky srdečního svalu (luminiscenční obraz)), (b) zelená")
58 skládání barev. Pro příklad RGB podle obrázku je známo, že skládáním barev vznikne barva bílá, proto pro všechny tři roviny zvolíme stejnou barvu a výsledně vyjde barva bílá na místech původní barvy v obraze, ostatní části jsou tmavé. Konkrétní příklad aplikace je na obrázku 4.5.2b. V tomto obrázku došlo v případě (b) k výměně barevných složek, v případě (c) došlo pouze ke zvýraznění červené barvy podle postupu popsaného v obrázku na hodnotu bílou a v obrázku (d) k separaci modrých částí z originálního obrazu obdobným způsobem jako v případě (c). (a) (b) (c) (d) Obrázek 4.5.2b: Příklad aplikace separace: (a) originální obraz (-buňky srdečního svalu (luminiscenční obraz)), (b) zelená barva na červenou složku, modrá barva na zelenou složku a červená barva na modrou složku, (c) červená barva do všech třech složek, (d) modrá barva do všech třech složek. [Generováno vlastním programem v LabView] ~ 57 ~


59 4.5.3 Rozvodí Aplikace je spustitelná pro šedotónový a binární obraz (obrázek 4.5.3). V tomto programu má spíše doplňující charakter. Podle kapitoly dochází touto metodou k segmentaci obrazu, tedy rozdělení obrazu na určité části. Tato aplikace je vhodná spíše pro binární obraz, kde se dají spočítat jednotlivé oblasti. V šedotónové oblasti je tato segmentace příliš jemná a výpočet bohužel nelze upravit, tudíž dochází ve výsledku k segmentaci na mnoho (tím pádem nic nevypovídajících) částí. Z toho plyne nevýhoda programování v LabView, která spočívá v tom, že není poznat co se děje uvnitř bloků či podle jakých vzorců se přepočítává obraz na danou úpravu, aniž by to bylo potřeba někde složitě vyhledávat v manuálech. Obrázek 4.5.3: Schéma zapojení: aplikace rozvodí. [Schéma vlastního programu] 4.6 Morfologie Tato část programu vychází především ze získaných znalostí z kapitoly Většina aplikací, které jsou obsaženy v této záložce programového panelu, pracuje s binárním obrazem, výjimku tvoří aplikace Morfologické operace, kterou je možné použít i na šedotónový obraz Odstranění děr Aplikace použitelná na binární obraz vychází z pokročilých morfologických operací, tedy přesně z plnící funkce (kapitola ). Používá se pro odstranění děr v objektech (buňkách). Výsledek použití je zobrazen na obrázcích 4.9.1,2,3. Schéma zapojení je na obrázku 4.6.1(a). (a) (b) Obrázek 4.6.1: Schéma zapojení: (a) aplikace odstranění děr, (b) aplikace odstranění okrajů. [Schéma vlastního programu] ~ 58 ~
. Výsledek použití je zobrazen na obrázcích 4.9.1,3,4. 4.6.3 Odstranění malých objektů Přístupné pouze pro operace s binárním obrazem.")
60 4.6.2 Odstranění okrajů Aplikace pro binární obrazy odstraňuje všechny objekty, které se dotýkají okrajů obrazovky. Funkce je podrobně popsána v kapitole v pokročilých morfologických operacích a jmenuje se hraniční funkce. Schéma zapojení je na obrázku 4.6.1(b). Výsledek použití je zobrazen na obrázcích 4.9.1,3, Odstranění malých objektů Přístupné pouze pro operace s binárním obrazem. Jedná se o částicový (objektový) filtr, který je podrobněji popsán v kapitole pod názvem filtr dolní a horní propust. Uživatel nastavuje počet erosí neboli velikost detekovaných částic (podle přepočtu). Jako další důležité nastavení uživatelem je volba typu filtru. Typ dolní propust filtruje od malých částí obrazu a filtr typu horní propust odstraňuje velké objekty a malé ponechává (obrázek 4.6.3(a)). Výsledek použití je zobrazen na obrázcích 4.9.1,2,3, Vyplnění prohlubní Pro aplikaci na binární obraz. Funkce vychází opět z kapitoly pod názvem convex hull. Je vhodná pouze pro použití na kulovité objekty (buňky). Při použití na objekty, které mají například tvar písmene C nebo S a tak podobně dojde k vyplnění a doplnění daného objektu na celistvý tvar, což v některých případech není žádoucí (obrázek 4.6.3(b)). (a) (b) Obrázek 4.6.3: Schéma zapojení: (a) aplikace odstranění malých objektů, (b) aplikace vyplnění prohlubní. [Schéma vlastního programu] Morfologické operace Aplikace morfologické operace je sestavena především pro binární obraz, ale zároveň je umožněno provádět danou operaci na obraz šedotónový (obrázek 4.6.5). Uživatel volí nastavení tedy přepínání mezi konkrétními operacemi. Tento programový blok obsahuje celkem 12 operací, které patří do základních morfologických operací podrobně popsaných v kapitole Pro použití morfologické operace na šedotónový obraz se jako nejvýraznější změny v obraze projevují operace Erode (eroze) a Dilate (dilatace), pro tuto aplikaci uživatel také volí počet iterací, což znamená kolikrát se daná operace na obraz použije.výsledky použití většiny operací na binární obraz jsou patrné na obrázku d. ~ 59 ~
![(a) (b) Obrázek 4.6.5: Schéma zapojení: (a) aplikace morfologických operací na binární obraz, (b) aplikace morfologických operací na binární obraz. [Schéma vlastního programu] 4.](/docs-images/73/68133488/images/61-0.jpg "7 Analýza V této kapitole bude využito obrazu, který byl většinou upraven předchozími aplikacemi.")
61 (a) (b) Obrázek 4.6.5: Schéma zapojení: (a) aplikace morfologických operací na binární obraz, (b) aplikace morfologických operací na binární obraz. [Schéma vlastního programu] 4.7 Analýza V této kapitole bude využito obrazu, který byl většinou upraven předchozími aplikacemi. Pod touto programovou záložkou jsou aplikace, které počítají za pomocí různých funkcí příslušné hodnoty či speciálně vykreslují do obrazu. Dané aplikace jsou rozděleny pod záložku hledání a počítání a jdou implementovat pouze na binární či šedotónový obraz (tabulka 4). Rozdělení mezi záložky počítání a hledání je spíše intuitivní a přirozenější z uživatelského hlediska než že by bylo tříděno na základě funkčnosti jádra aplikace Hledání kruhů Tato morfologická operace, detailněji popsaná v kapitole pod názvem funkce kruhů, je aplikována na binární obraz. Funkce je vhodná na použití při hledání překrývajících se kulovitých buněk. Pokud je znám poloměr hledané kulovité buňky, tak je hledání přesnější, protože je uživatelsky možné zadat poloměr hledané buňky, tedy konkrétně rozsah poloměrů. Výstupem je počet nalezených kruhů, které spadají do zadané intervalu poloměru. Dále se vypisuje tabulka hodnot, ve které každému nalezenému kruhu přísluší jedno pole hodnot. V tomto poli hodnot jsou vypsány souřadnice středu kruhu detekovaného v obraze, jeho poloměr a velikost jádra. Velikost jádra odpovídá totožné vzdálenostní vrstevnici (princip výpočtu). Ukázka použití je zobrazena na obrázku b(c). Pro lepší orientaci v obraze byla do této aplikace zahrnuta možnost (Zapnuto/Vypnuto) popisu jednotlivých kruhů, tedy jejich číselná identifikace příslušející k vlastnímu poli výsledků. Popis kruhů je vložen ve For smyčce, kde jeden cyklus odpovídá číslu kruhu. Popis je prováděn pomocí funkce Overlay Text. Souřadnice tohoto popisu jsou načítány z tabulky hodnot jako souřadnice jádra příslušného kruhu a následně ještě korigovány o mínus 6 pixelů v horizontální rovině a o plus 6 pixelů ve vertikální rovině a to z toho důvodu, aby nedocházelo k překrývání jádra kruhu a příslušného popisu. Toto nastavení umístění textu lze také nadefinovat pomocí vstupu Font, Size & Style Overlay Text bloku (obrázek 4.7.1). ~ 60 ~
![Obrázek 4.7.1: Schéma zapojení: hledání kruhů. [Schéma vlastního programu] 4.7.2 Hledání hran Aplikace použitelná pouze na šedotónový obraz.](/docs-images/73/68133488/images/62-0.jpg "Funkce, která je pro tuto aplikaci použitá, se využívá spíše v obrazových detektorech, kde se rozměřují velikosti konkrétního předmětu nikoliv v buněčné mikroskopii.")
.")
62 Obrázek 4.7.1: Schéma zapojení: hledání kruhů. [Schéma vlastního programu] Hledání hran Aplikace použitelná pouze na šedotónový obraz. Funkce, která je pro tuto aplikaci použitá, se využívá spíše v obrazových detektorech, kde se rozměřují velikosti konkrétního předmětu nikoliv v buněčné mikroskopii. Nicméně tato aplikace byla použita z důvodu možného měření nejen průměrů uvnitř buněk, ale i rozměřování vzájemné vzdálenosti mezi buňkami. Jedná se o automatický detektor, který hledá v poli vyznačeném na obraze pomocí kurzoru (ROI). Nastavení detekčních parametrů jako jsou například kontrast a tak dále jsou pevně zakomponovány již v návrhu. Toto nastavení proběhlo podle doporučených hodnot LabView. Uživatel volí pouze rovinu, ve které bude daná vzdálenost detekována a počítána. K dispozici jsou tyto čtyři možnosti: průměr objektu horizontálně, průměr objektu vertikálně, mezera horizontálně a mezera vertikálně. Volitelnost těchto možností je ošetřena Case strukturou, která pro určité zadání obsahuje příslušný blok (obrázek 4.7.2). Výsledkem výpočtu průměru je maximální detekce průměru, u mezery je to nejmenší detekovaná mezera. Obrázek 4.7.2: Schéma zapojení: hledání hran. [Schéma vlastního programu] Kostra objektů Tato aplikace vychází z pokročilých morfologických úprav kapitola , pod názvem skeleton. Lze použít pouze na binární obraz (obrázek 4.7.3(a)). Vhodné pro nastínění hřebenů distanční mapy objektů nebo pro zobrazení střední vzdálenosti mezi objekty. ~ 61 ~
63 Uživatel může volit mezi třemi typy strukturovacího prvku a to L-skeleton, M-skeleton a Skiz. Příklad použití této aplikace s použitím všech třech strukturovacích prvků je na obrázku a Těžiště Aplikace vhodná pro šedotónový i binární obraz a v tomto programu má spíše doplňující charakter (obrázek 4.7.3(b)). Výstupem jsou souřadnice těžiště obrazu. Použití je vhodné pro zjištění umístění většinového výskytu objektu. Například pokud obraz o rozměrech 500x500 pixelů obsahuje malé objekty (buňky) a aplikace těžiště vypíše souřadnice těžiště obrazu 125x200, tak z toho lze usuzovat, že objekty mají většinové zastoupení v levé (z pohledu pozorovatele) horní polovině obrazu. (a) (b) Obrázek 4.7.2: Schéma zapojení: (a) kostra objektů, (b) těžiště. [Schéma vlastního programu] Řez obrazem Tato aplikace vhodná pro šedotónový i binární obraz má podle nastavení široké využití. Prvním krokem při použití řezu obrazem je vyznačení oblasti zájmu v obraze (ROI), tedy ideálně uživatelem nakreslit přímku do obrazu, případně jakýkoliv volitelný tvar. Po spuštění se uživateli zobrazí dva pomocné grafy, ve kterých je vyznačen profil řezu a gradient řezu. Jednotky pro oba grafy na ose X jsou v pixelech, tedy při vhodném umístění řezného profilu lze vyčíst rozměry objektů i vzdálenosti mezi objekty. Osa Y pro profil řezu odpovídá hodnotám stupňů šedi v obraze. V případě šedotónového obrazu zůstane v obraze vyznačen řezný profil a dále bude do tohoto obrazu zanesen výsledek detekce hran v podobě vyznačení těchto detekovaných hran. Uživatel má možnost nastavit, které hrany budou detekovány, například všechny hrany, pouze nejvýraznější hrana, první + poslední hrana a pouze první hrana. Dále je také možné v rozšířeném nastavení určit, zdali budou detekovány pouze náběžné či sestupné hrany, velikost detekující matice (=>citlivost detekce), šířka detekovatelné hrany, typ interpolace, volba detekující metody a tak podobně. Kromě již zmíněného zobrazení dvou znázorňujících grafů je také vypsán počet detekovaných hran podle výše popsaného nastavení detektoru. V případě použití na binární obraz dojde pouze k výsledkům v podobě zobrazených grafů profilu řezu a jeho gradientu, protože tato funkce neumožňuje nastavit tak vysokou citlivost, aby docházelo k detekci hran mezi hodnotami ~ 62 ~

![5b. Obrázek 4.7.5a: Schéma zapojení: řez obrazem. [Schéma vlastního programu] Obrázek 4.7.5b: Příklad aplikace řezu obrazem s vyznačením detekovaných hran do obrazu a vykreslení příslušného profilu a gradientu řezu.](/docs-images/73/68133488/images/64-1.jpg "[Generováno vlastním programem v LabView] 4.7.6 Kvantifikace Tato aplikace byla zařazena do záložky počítání, lze použít pro šedotónový a binární obraz (obrázek 4.7.6(a)).")

64 binárního obrazu 0 a 1. Schéma zapojení je na obrázku 4.7.5a a skládá se ze třech hlavních bloků. První blok podle vybrané oblasti v obraze (přímka (ROI)) vykreslí profil řezu. Druhý blok také z vybrané oblasti zájmu a nastavení vstupních hodnot vykreslí gradient přímky. Třetí blok detekované hrany zvýrazní. Příklad použití je na obrázku 4.7.5b. Obrázek 4.7.5a: Schéma zapojení: řez obrazem. [Schéma vlastního programu] Obrázek 4.7.5b: Příklad aplikace řezu obrazem s vyznačením detekovaných hran do obrazu a vykreslení příslušného profilu a gradientu řezu. [Generováno vlastním programem v LabView] Kvantifikace Tato aplikace byla zařazena do záložky počítání, lze použít pro šedotónový a binární obraz (obrázek 4.7.6(a)). Programový blok poskytuje příslušné informace celého obrazu, mezi které patří například střední hodnota pixelů, tedy hodnota, která přísluší střední úrovni šedi ze všech vyskytujících se stupňů s ohledem na jejich zastoupení v obraze, dále obsahuje minimální a maximální hodnotu pixelů a tak podobně. Tento programový blok nelze uživatelsky nastavovat či jinak ovlivnit výsledné hodnoty. ~ 63 ~
.")
65 4.7.7 Vzdálenost Aplikace použitelná pouze na binární obraz (obrázek 4.7.6(b)). Při návrhu bylo využito teoretických poznatků z kapitoly o pokročilých morfologických operacích, tedy konkrétně vzdálenostní funkce. Spuštěním této aplikace dojde podle příslušných výpočtů k vykreslení vzdálenostních vrstevnic, zobrazených v ukázce na obrázku b(b). Funkce může být prospěšná uživateli k vizuálnímu porovnání například velikosti sousedních objektů (buněk) či ke stanovení umístění jádra objektů, tedy vzdálenostních vrcholů. (a) (b) Obrázek 4.7.6: Schéma zapojení: (a) kvantifikace, (b) vzdálenost. [Schéma vlastního programu] Analýza částic Tato aplikace spustitelná na binární obraz patří mezi nejdůležitější části analýzy jako takové. Vnitřní programové uspořádání lze rozdělit na dvě hlavní části (obrázek 4.7.8a). První částí je blok, který pro uživatele vypisuje tabulku s polem hodnot analýzy částic. Tato tabulka obsahuje: plochu částice, souřadnice a orientaci částice, rozměry částic (výška, šířka), počet otvorů (děr v objektech) a hraniční obdélník (souřadnice X a Y krajních bodů částice). Každému objektu (buňce) v obraze přísluší jeden list tabulky. Výstupem je také počet částic v obraze, který je samozřejmě totožný s počtem listů v tabulce. Druhou stěžejní částí jsou bloky, které vynesou uživatelem vybrané informace přímo do obrazu. K tomu je použit analyzační blok, který umožňuje navolit libovolné informace o objektu, se kterými se bude dále pracovat. V těchto volbách je celkem 87 možností, mezi něž patří například první detekovaný pixel v ose X a Y, průměry detekovaných objektů v horizontálním i vertikálním směru, procentuální podíl z celkového obrazu a mnoho dalšího. Pro tuto aplikaci bylo vybráno celkem 7 hodnot, které se zdají být pro použití při analýze buněk nejužitečnější, jsou to: souřadnice X a Y středu objektu (buňky), obsah a čtyři souřadnice okrajových částí objektu. Tyto hodnoty jsou uživatelem volitelně zobrazeny do obrazu jako: střed objektu (buňky), obsah, ohraničující obdélník a číslo částice pro snadnější orientaci mezi tabulkou hodnot vypsaných v prvním již zmiňovaném bloku a příslušnosti k objektu v obraze. Uživatel může také libovolně měnit barvu těchto popisů a to z důvodu lepší čitelnosti a odlišitelnosti jednotlivých popisků. Možnost volby barev byla s ohledem na ~ 64 ~
 umožnuje spojovat původní, například barevný, obraz s výslednou analýzou, která obsahuje příslušné popisy.")
66 možnost další aplikace Prolnutí, která je spustitelná po provedení analýzy částic. Prolnutí (podrobně v kapitole 4.8.7) umožnuje spojovat původní, například barevný, obraz s výslednou analýzou, která obsahuje příslušné popisy. Pokud tyto popisy budou vyjádřeny například zelenou barvou a původní obraz bude také obsahovat zelené části, tak popisy budou nečitelné, proto byla implementována tato možnost. Obrázek 4.7.8a: Schéma zapojení: analýza částic s popisem hodnot objektů. [Schéma vlastního programu] Způsob zapsání textu do obrazu byl již popsán v kapitole 4.7.1, což platí pro výpis čísla a obsah objektu v obraze. Dalším zadáním byl požadavek na vyznačení středu objektu. První pokus vyznačení do obrazu proběhl pomocí textového popisu se znakem + (plus), který byl podle možných nastavení vložen do středu buňky a podle textového nastavení také na střed. Ovšem výsledný efekt byl nežádoucí, protože při přibližování či oddalování zobrazovaného obrazu docházelo k posuvům těchto středů. Proto bylo značení středů následně přepracováno na současnou podobu, kdy se využilo bloku pro kreslení úsečky. Danému funkčnímu bloku pro kreslení úseček se zadávají souřadnice X a Y počátečního a konečného bodu. Jelikož byly známy souřadnice středu daného objektu, tak došlo ke korekci těchto hodnot pro vykreslení příslušného znaku x jak je naznačeno na obrázku 4.7.8b(b). Vykreslení hraničního obdélníku, který přísluší danému objektu, probíhá podle stejného principu jako u vyznačování středů, tedy pomocí úseček. K výpočtu jsou k dispozici hodnoty ~ 65 ~
67 souřadnic krajních bodů objektu, jejichž vzájemnou kombinací bylo dosaženo k určení souřadnic vykreslení hraničního obdélníku, naznačeno na obrázku 4.7.8b(a). Výsledek samotné aplikace vykreslení je na obrázku 4.9.1,2,3. x1,y1 y1 x2,y1 x-3,y-3 x+3,y-3 Left = x1 Right = x2 Top = y1 Bottom = y2 x1 buňka x2 xy x1,y2 y2 x2,y1 x-3,y+3 x+3,y+3 (a) (b) Obrázek 4.7.8b: Náčrt principu dosažení souřadnicových hodnot pro: (a) hraniční obdélník, (b) znak vyznačující střed buňky. 4.8 Programové volby a úpravy V této kapitole jsou popsány aplikace, které pomáhají v chodu programu a doplňují možnosti úprav, jako jsou například změny rozměrů obrazu, zobrazení v externím okně, změna palety zobrazovaného obrazu a tak podobně Aplikovat úpravu Jak již bylo nastíněno v kapitole 4.2.2, program obsahuje dvě obrazové smyčky. Jedna Zdrojový obraz a druhá Upravený obraz. Obě tyto smyčky jsou připojeny k zobrazovacím oknům na uživatelském panelu. Veškeré úpravy a aplikace použité na obraz vychází ze Zdrojového obrazu, který se nemění, a jejich výsledek je zobrazen v Upraveném obrazu, uživatel má tedy možnost porovnávat původní a upravený obraz. Pokud je uživatel s provedenou úpravou spokojený a chce pokračovat dalšími kroky, tedy použitím dalších úprav, je nutné stisknout tlačítko Aplikovat úpravu, které svou funkcí převede Upravený obraz na Zdrojový obraz, který bude výchozí pro další operace a aplikace jak je naznačeno na obrázku Zdrojový obraz Programové volby a úpravy Úpravy obrazu Segmentace Morfologie Analýza Upravený obraz Aplikace úprav Obrázek 4.8.1: Blokové schéma: aplikace úprav. ~ 66 ~

68 V příslušném okně Event struktury dojde nejen k přepisu Zdrojového obrazu, ale podle pomocných proměnných se také přepisují příslušné vlastnosti pro viditelnost objektů, například při převodu mezi druhy barevných systémů, podrobně o proměnných v kapitole Obrázek samotného zapojení zde nebude uveden, protože se jedná pouze o jednoduchý blok pro kopírování a dále o zapojení mnoha bloků vlastností příslušných objektů, které je komplikované, nicméně celé schéma je k dispozici v příloze Zpět zdroj Aplikace pod tímto tlačítkem je pouze pomocná. Jak již bylo nastíněno, uživatel má k dispozici dva obrazové výstupy (Zdrojový a Upravený obraz). Zdrojový obraz byl při návrhu programu brán spíše jako informativní, tudíž okno Zdrojového obrazu je oproti výstupu Upravený obraz čtvrtinové velikosti, z tohoto důvodu byla zařazena možnost, pomocí tlačítka Zpět zdroj, zobrazit Zdrojový obraz, tedy původní, ve velkém okně Upravovaného obrazu. Vnitřní zapojení v příslušné Event struktuře, spočívá pouze v propojení odpovídajících obrazových smyček Vyříznout Tato aplikace umožnuje ze zobrazovaného obrazu vyříznout vyznačenou část. Oblast zájmu (ROI) se vyznačuje do obrazového okna pomocí obdélníku případně pomocí diagonální úsečky, která bude úhlopříčkou výsledného obrazu. Aplikace je vhodná pokud uživatele zajímá pouze určitá část obrazu, se kterou hodlá dále pracovat (obrázek 4.8.3(a)). (a) (b) Obrázek 4.8.3: Schéma zapojení: (a) vyříznout, (b) změnit rozměry. [Schéma vlastního programu] ~ 67 ~
69 4.8.4 Změnit rozměry Spuštěním této aplikace dochází ke změnám rozměrů obrazu. Uživatel nastavuje rozměry v ose X a v ose Y. Změny rozměrů probíhají převzorkováním obrazu na zadané rozměry, s čím souvisí i uživatelsky volitelný typ interpolace. V nabídce jsou tyto typy: Zero Order- (nulové řazení) zaokrouhlí na nejbližší integrální umístění pixelů, Bi-Linear- (oboustranné lineární) je použito lineární interpolace v obou směrech osy X a Y pro výpočet umístění pixelu, Quadratic- (kvadratické) použití kvadratické rovnice pro výpočet umístění pixelu, Cubic Spline- (krychlové splajny) použití kubických splajnů pro výpočet pixelu. Vhodné pro použití na obrazy se špatným (malým) rozlišením (obrázek 4.8.3(b)) Externí okno Tato aplikace je doplňková a jak napovídá název, jde o otevření aktuálního Upravovaného obrazu v externím okně. Může sloužit jako pozdější náhled na předchozí obraz Změna palety Také doplňková funkce, která mění paletu zobrazení pro Upravený obraz. Palety, které má uživateli k dispozici, jsou: šedotónová, binární, gradient, rainbow a temperature Prolnutí Aplikace, která byla vytvořena pro lepší názornost a porovnání výsledků s původním obrazem, který byl načten. Pro tuto aplikaci byla přidána třetí obrazová smyčka, která obsahuje originální obraz pořízený při načítání obrazu. Možnost použití akce prolnout obrazy nastává až po spuštění aplikace Analýza částic a to z důvodu nutnosti prolínat binární obraz na originál, protože je tak nastaven vnitřní mechanismus výpočtu, a z praktického hlediska, kdy lze vložit do originálního obrazu popisky z analyzovaných částic, které přísluší právě originálu, principiální schéma je na obrázku 4.8.7a. Načtení obrazu Barevný obraz Analýza částic Výsledný obraz Prolnutí Výsledek Šedotónový obraz Původní obraz Obrázek 4.8.7a: Blokové schéma aplikace prolnutí. Podle schématu zapojení na obrázku 4.8.7b, dochází k přepočtu podle níže popsaného způsobu. Vstupem je zdrojový obraz, který je binární, tedy nabývající hodnot 0 a 1 stupňů šedi. Druhým vstupem je obraz, který byl při spuštění programu uživatelem načten a může být v šedotónovém nebo barevném systému. Bylo zapotřebí zkompletovat tyto dva obrazy dohromady. Podle testování byl tedy binární obraz nejprve převeden do odpovídajícího systému barev například RGB, ale stále nabýval hodnot 0 a 1 v každé složce RBG, proto byla zvolena další úprava a tou byla ekvalizace histogramu, která obraz podle kapitoly ~ 68 ~

70 přetransformovala na oblasti s hodnotami 0 a 255 pro každou složku RGB. Obraz v této podobě už lze prolínat s originálním obrazem. Dalším postupem byl zařazen odčítací člen, který od originálu odečítá upravený obraz. Binární obraz se do originálního vykreslil černými plochami na místě částic. Pokud by byl použit sčítací člen namísto odčítacího, tak by vyznačené plochy byly zobrazeny bíle. Individuální dojem budil lepší pocit při začernění příslušných objektů, proto bylo zvoleno odčítání. Předposledním krokem bylo docílení plynulé uživatelsky nastavitelné změny prolnutí originálního a analyzovaného obrazu. Tohoto bylo dosaženo pomocí funkce LookUp blíže popsaná v kapitolách a a aplikovaná v kapitole Pro tento funkční blok byl pevně nastaven kontrast a gama korekce a bylo využito nastavování jasové hodnoty, která mění stupně šedi, v případě RGB obrazu pro všechny tři složky. Nutné bylo přenastavit uživatelsky nastavitelný posuvný ovladač na hodnoty <-127, 128>, protože funkční blok bere vstupní obraz jako střední hodnotu nikoliv v našem případě krajní úroveň šedi 255, tudíž byl schopen s nastavením nulté hodnoty snížit jas na hodnotu pouze 128 upravovaného obrazu. Poté už byla pouze doplněna možnost popisu jednotlivých objektů z aplikace Analýza částic. Výsledky jsou zobrazeny na obrázcích 4.9.1,2,3,4. Obrázek 4.8.7b: Schéma zapojení: prolnutí. [Schéma vlastního programu] Vložit do originálu Aplikace byla vytvořena kvůli aplikaci prolnutí popsané v předcházející kapitole Aplikace prolnutí může protínat pouze stejně velké obrazy, proto v případě, že bude použita aplikace Vyříznout nebo Změnit rozměry je nutné použít aplikaci Vložit do originálu, která umožní pozdější bezproblémové použití aplikace Prolnutí. Funkce spočívá pouze v použití kopírovacího bloku na upravený obraz, který tím bude zkopírován do obrazové smyčky s originálním obrazem Nápověda Pro snazší orientaci v programu byla vytvořena kontextová nápověda, která případně přiblíží vhodnost použití konkrétní aplikace, u které je zobrazena. Tato nápověda se spouští ~ 69 ~


71 v uživatelském prostředí stisknutím žlutého kulatého tlačítka u příslušných aplikací. Samotný text nápovědy se zobrazuje v pravém dolním rohu. Bylo vytvořeno 28 samostatných textů, které byly vepsány do vlastností popisových oken příslušných žlutých tlačítek. Funkční uspořádání této aplikace využívá vlastnosti objektů, kde bylo nastaveno snímání hodnot popisových oken jednotlivých tlačítek. Vypsání této vlastnosti, tedy příslušného textu, je podmíněno stiskem příslušného tlačítka. Blokové schéma zde pro svou rozsáhlost tedy množství prvků, které se opakují, a jednoduchý princip, nebude uvedeno. Lze dohledat v příloze Výsledky V této kapitole jsou prezentovány dílčí obrazové výsledky, příklady pro vybrané aplikace a také postupy, jimiž jich bylo dosaženo. Výsledek č.: 1 Vstupem je RGB obraz buněk srdečního svalstva z fluorescenčního mikroskopu se dvěma druhy buněk. Červeně zbarvené buňky zabírají převážnou většinu snímku, minoritní modré jsou nevýrazné a malé oproti červeným. Analýza byla provedena pro modré buňky. Výsledek, který je více než uspokojivý, je na obrázku i s aplikovaným postupem. (a) (b) Obrázek 4.9.1: (Začátek:) Dílčí zpracování obrazu a jeho výsledky: RGB obraz z fluorescenčního mikroskopu: (a) originální obraz, (b) použití aplikace separace s nastavením modrá, modrá, modrá, (c) manuální prahování, (d) aplikace pro odstranění děr, (e) odstranění okrajů, (f) odstranění malých objektů, (g) analýza částic s vykreslením hraničního čtverce, středového bodu a vypsání obsahu buňky, (h) aplikace prolnutí s nastavením 0% a výpisem ~ 70 ~
 (d) (e) (f) Obrázek 4.9.")
72 hodnot, (ch) aplikace prolnutí s nastavením 100% a výpisem hodnot. [Generováno vlastním programem v LabView] (c) (d) (e) (f) Obrázek 4.9.1: (Pokračování:). ~ 71 ~
")


73 (g) (h) (ch) Obrázek 4.9.1: (Dokončení:). ~ 72 ~


74 Výsledek č.: 2 Zdrojem je opět RGB obraz buněk z fluorescenčního mikroskopu se dvěma druhy buněk a to červené a zelené. V tomto případě nebylo podstatné, které buňky budou analyzovány, ale problém spočíval v nerovnoměrném osvětlení obrazu, pro který nebylo vhodné ihned aplikovat Separaci jako v předchozím případě srdečních buněk. Pro analýzu byla vybrána detekce zelených buněk. Výsledek, který je značně ovlivněn nerovnoměrným osvětlením, je i s aplikovanými postupy na obrázku (a) (b) (c) (d) (e) (f) Obrázek 4.9.2: (Začátek:). ~ 73 ~
75 (g) (h) Obrázek 4.9.2: (Dokončení:) Dílčí zpracování obrazu a jeho výsledky: RGB obraz z fluorescenčního mikroskopu: (a) originální obraz, (b) úprava LookUp nastavení snížení jasových hodnot červené barvy na hodnotu 20 a modré barvy na hodnotu 100, dále zvýšení kontrastu zelené na hodnotu 60, (c) aplikace separace s nastavením zelená, zelená, zelená, (d) manuální prahování, (e) odstranění děr + malých objektů, (f) analýza částic s výpisem čísel objektů a vykreslením hraničního obdélníku a středového bodu, (g) aplikace prolnutí s nastavením 50% a výpisem hodnot, (h) aplikace prolnutí s nastavením 100% a výpisem hodnot. [Generováno vlastním programem v LabView] ~ 74 ~



76 Výsledek č.: 3 Zdrojem je šedotónový obraz buněk. Ukázka vhodné aplikace na tento druh obrazu je naznačen a popsán na obrázku (a) (b) (c) (d) (e) (f) (g) (h) Obrázek 4.9.3: (Začátek:). ~ 75 ~
 Dílčí zpracování obrazu a jeho výsledky: šedotónový obraz: (a) originální obraz, (b) úprava maskovým operátorem typu Laplacián #1 o velikosti 5 x 5, (c) vyhlazení mediánovým filtrem,")
77 (ch) Obrázek 4.9.3: (Dokončení:) Dílčí zpracování obrazu a jeho výsledky: šedotónový obraz: (a) originální obraz, (b) úprava maskovým operátorem typu Laplacián #1 o velikosti 5 x 5, (c) vyhlazení mediánovým filtrem, (d) automatické prahování, (e) odstranění děr, (f) odstranění okrajů, (g) odstranění malých objektů, (h) analýza částic s výpisem hodnot obsahu buněk a vykreslením hraničního obdélníku a středového bodu, (ch) aplikace prolnutí s nastavením 100% a výpisem hodnot. [Generováno vlastním programem v LabView] Výsledek č.: 4 Zdrojem je RGB obraz buněk hmyzomorky včelí. Ukázka vhodného zpracování obrazu pro buňky, které mají totožné jádro (barevně) jako jejich pozadí. Navíc se jedná těsné uskupení buněk, které se vzájemně dotýká. Základem postupu je opačné prahování. Jde nastavit, aby přes prahové hodnoty prošli pouze hrany, obaly jednotlivých buněk, ale je důležité brát v potaz, že se okraje dotýkají a při jejich vyplnění (odstranění děr) by došlo ke spojení dotýkajících se hran v jeden celek a tím i možnost další identifikace jednotlivých buněk. Uspokojivý výsledek je i s postupy vyznačen na obrázku ~ 76 ~
 (d)")

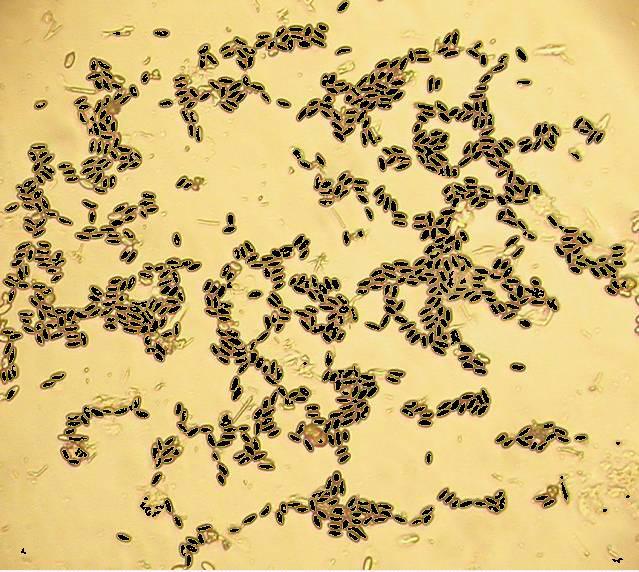
78 (a) (b) (c) (d) (e) (f) Obrázek 4.9.4: (Začátek:). ~ 77 ~
79 Obrázek 4.9.4: (Dokončení:) Dílčí zpracování obrazu a jeho výsledky: RGB obraz: (a) originální obraz, (b) úprava LookUp nastavení snížení jasových hodnot zelené a modré barvy na hodnotu 50, dále zvýšení kontrastu červené na hodnotu 50 a gama korekce červené barvy na hodnotu 2,6, (c) manuální prahování, (d) aplikace odstranění malých objektů s nastavením na horní propust s erozí 3 odstraní velké objekty, tedy v četně pozadí, (e) odstranění okrajů + malých objektů s nastavením dolní propust s erozí 1, (f) aplikace prolnutí s nastavením 100%. [Generováno vlastním programem v LabView] ~ 78 ~
80 5 Závěr Podle zadání pro zpracování mikroskopického obrazu bylo nutné nejprve nastudovat danou problematiku. V diplomové práci je tedy věnována převážná část obrazu, a to jak jeho rozdělením podle barevných systémů či podle bitové hloubky obrazu, tak hlavně jeho zpracování. Dopodrobna byly rozebrány jednotlivé filtry a jejich maskové operátory, které se používají k úpravě obrazů ať už ke zlepšení kontrastu či k odstranění nežádoucího rušení v podobě přítomnosti šumu. Dále došlo k seznámení s rozdělováním obrazu tedy jeho segmentaci, čímž bylo docíleno převodu na binární obraz. Binární obraz bylo nutné dále upravovat pomocí morfologických operací, které jsou taktéž popsány v části o obrazech. Po nastudování pokročilých morfologických operací bylo možné aplikovat i některé výpočetní techniky z této oblasti. V konečné fázi studování dané problematiky bylo nahlédnuto i do možností analýzy obrazů programového prostředí LabView se součástmi IMAQ a Vision. V diplomové práci bylo také nahlédnuto do problematiky mikroskopie. A to hlavně z hlediska vzniku obrazu za pomoci snímání kamerou. V této kapitole byl také zdůrazněn problém převodu mezi barevnými systémy stejně jako v kapitole o obrazech a i s tím související subjektivní vnímání obrazu, které má za následek například to, že při stejném zadání a podobném zpracování nemusejí být výsledky shodné, i když nejsou nesprávné. V poslední části této práce byl sestaven program, který podle zadání využívá vhodné metody a aplikace pro použití v buněčné mikroskopii. K sestrojení programu byly využity především poznatky z teoretické části o zpracování a analýze obrazu. Do programu byly zařazeny vhodné bloky, které umožňují obraz načítat, zpracovat, analyzovat, počítat a rozměřovat s ohledem na praktické použití. Tento systém byl dopodrobna popsán, rozebrán a odůvodněn pro vhodné použití a uplatnění daných nástrojů. Funkčnost systému byla ověřena na reálných datech několika příkladů buněčných struktur. Samotný program umožňuje načítání volitelně ze souboru nebo z kamery ve zvoleném systému barev. Obraz je nejprve upravován pomocí šedotónových nebo barevných aplikací. Poté je uživatel směřován směrem k segmentaci obrazu, kde použije přednastavené automatické aplikace nebo využije vlastního nastavení hodnot pro segmentaci, rozdílně pro barevný a šedotónový obraz. Určité spektrum analýz je uživateli zpřístupněno už během úprav šedotónového obrazu. Po segmentaci se pro použití odemykají morfologické operace, kde volbou vhodných úprav lze dosáhnout vytyčeného cíle. Prací s binárním obrazem se zpřístupní další možnosti analýzy obrazu. Uživatel má možnost v konečné fázi analýzy porovnávat dosažených výsledků oproti původnímu obrazu. S programem byla odzkoušena laboratorní kamera od mikroskopu (typ: pixelink PL-B742F), která v pořádku poskytuje potřebné obrazy pro program. ~ 79 ~
81 Program byl tvořen s ohledem na uživatele. Pro snazší orientaci byly nežádoucí úpravy obrazu uživateli znepřístupněny, což usnadňuje orientaci mezi tím co má uživatel za aplikace k dispozici, a zároveň se tak předchází chybným stavům programu. Dále je vhodné zdůraznit, že uživatel má možnost zkoušet dané aplikace a porovnávat účinek mezi sebou bez následků, dokud není správnost úpravy potvrzena samotným uživatelem. Do programu byla také vložena kontextová nápověda, přibližující použití jednotlivých funkcí. Jako velký přínos tohoto programu lze považovat kromě samotných úprav a morfologických operací možnost prolínat výsledný obraz s originálem či případné vyznačení vypočtených hodnot originálního obrazu. U barevných obrazů také možnost separace barev, která má uplatnění hlavně pro obrazy z luminiscenčních mikroskopů. Velkou vypovídací hodnotu má také aplikace řez obrazem, kterou lze uplatnit pro šedotónový i binární obraz. Dosažené výsledky nejdůležitějších úprav jsou zobrazeny v kapitole 4.9, kde byla provedena analýza několika druhů obrazů. Dosažené výsledky jsou více než uspokojivé i pro složité obrazy jako například obrázek 4.9.4, který má jádra buněk totožné s pozadím obrazu, pak bylo nutné zvolit jiný přístup úprav obrazu, který je u daného obrázku popsán. Neuspokojivá úprava proběhla pouze na obrázku 4.9.2, kde bylo cílem vyznačit zelené buňky. Problém byl způsoben především nestejnoměrným osvětlení při snímání mikroskopem. Tento problém byl již nastíněn v kapitole 4 o mikroskopech. Výsledek analýzy tedy spočívá ve zvoleném kompromisu při uplatnění segmentačních metod. Zdali dá uživatel přednost analýze buněk umístěných v přesvíceném středu obrazu nebo analýze buněk v tmavém okraji obrazovky. Čistě teoreticky by šlo takovýmto způsobem segmentovat obraz po částech a vhodné výsledky skládat dohromady. Více zhodnocujících obrázků zde není uvedeno, protože zadání může být různorodé, stejně jako široké možnosti toho programu v jeho řešení, a jak již několikrát bylo uvedeno, vnímání obrazu je čistě subjektivní, proto je vhodnější a žádoucí, aby samotný uživatel program vyzkoušel a pak ohodnotil jeho schopnost či neschopnost vhodné analýzy buněčných struktur. Většina obrázků v textu je vytvořena pomocí tohoto programu. Vzhled uživatelského prostředí je přiložen v Příloze 1. Při tvorbě samotného programu došlo k problému při snaze počeštit dané nastavení. Některé vstupní hodnoty při přejmenování nedělaly problém, ale některé nebyly schopné akceptovat jiné názvy, než mají určené. Z tohoto důvodu jsou některé části programu počeštěné a některé jsou v původním znění. Teoreticky by to šlo vyřešit přidáním Case struktury, jež by měla jako vnější ovladač české znění a vnitřní hodnoty by odpovídaly původnímu znění a dále navazovaly na příslušný člen, ale vytvoření těchto jazykových ošetření by bylo složité, rozsáhlé a funkčně nemající vliv na chod programu, proto k takové tvorbě nedošlo. Cíl byl splněn a z programu mám dobrý pocit. ~ 80 ~
82 Seznam použité literatury: [1] JAN, J. Číslicová filtrace, analýza a restaurace signálů. 2. uprav. vydání. Vysoké učení technické v Brně : VUTIUM, s. ISBN [2] JAN, J. Medical image processing, reconstruction and restoration : Concepts and Methods Broken Sound Parkway NW, Suite 300 : CRC Press, Taylor & Francis Group, xxiii, 710 s. ISBN [3] IMAQ : IMAQ Vision Concepts Manual [online] North Mopac Expressway, Austin (Texas) : National Instruments Corporate Headquarters, 2000, June 2003 Edition [cit ]. xvi, 300 s. Dostupné z WWW: < PartNumber B-01. [4] WEGERHOFF, R; WEIDLICH, O; KÄSSENS, M. Basics of Light Microscopy & Imaging : Imaging & Miscroscopy [online]. Riedstrasse 8, Darmstadt, Germany : Frostcher Druck, [2012] [cit ]. 52 s. Dostupné z WWW: < [5] KLINGER, T. Image Processing with LabVIEW and IMAQ Vision. Prentice Hall PTR, [6] VLACH, J. Začínáme s LabVIEW. Praha : BEN - technická literatura, 2008 Seznam příloh: Příloha 1: Vzhled uživatelského prostředí vytvořeného programu. Příloha 2: Schéma zapojení programu. Příloha 3: Seznam přednastavených maskových operátorů. [3] ~ 81 ~

83 Příloha 1: ~ 82 ~
84 Příloha 2 (1/13): ~ 83 ~
: ~")
85 Příloha 2 (2/13): ~ 84 ~
: ~")
86 Příloha 2 (3/13): ~ 85 ~
: ~")
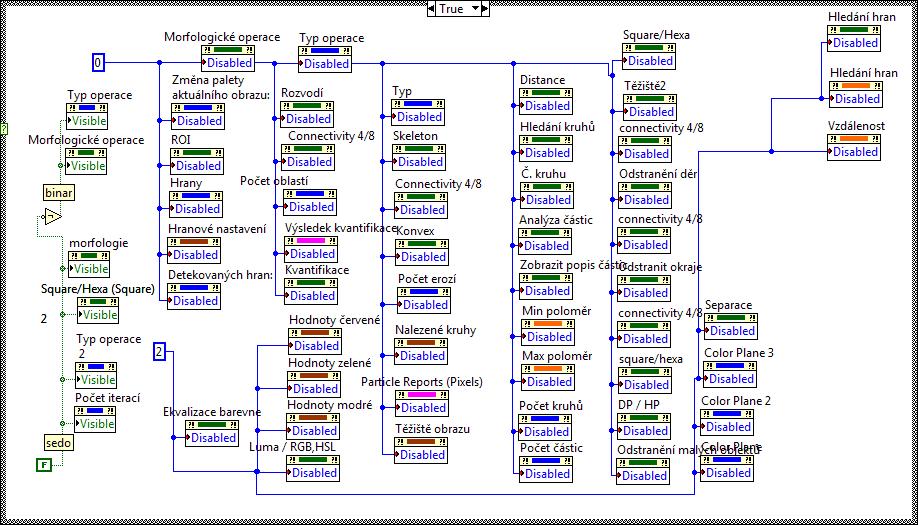
87 Příloha 2 (4/13): ~ 86 ~
: ~")
88 Příloha 2 (5/13): ~ 87 ~
89 Příloha 2 (6/13): ~ 88 ~
90 Příloha 2 (7/13): ~ 89 ~
91 Příloha 2 (8/13): ~ 90 ~
92 Příloha 2 (9/13): ~ 91 ~
: ~")
93 Příloha 2 (10/13): ~ 92 ~
94 Příloha 2 (11/13): ~ 93 ~
95 Příloha 2 (12/13): ~ 94 ~
: ~")
96 Příloha 2 (13/13): ~ 95 ~
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Práce na počítači. Bc. Veronika Tomsová
 Práce na počítači Bc. Veronika Tomsová Barvy Barvy v počítačové grafice I. nejčastější reprezentace barev: 1-bitová informace rozlišující černou a bílou barvu 0... bílá, 1... černá 8-bitové číslo určující
Práce na počítači Bc. Veronika Tomsová Barvy Barvy v počítačové grafice I. nejčastější reprezentace barev: 1-bitová informace rozlišující černou a bílou barvu 0... bílá, 1... černá 8-bitové číslo určující
Rozšíření bakalářské práce
 Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
13 Barvy a úpravy rastrového
 13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
Operace s obrazem. Biofyzikální ústav LF MU. Projekt FRVŠ 911/2013
 Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Přednáška kurzu MPOV. Barevné modely
 Přednáška kurzu MPOV Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář E512, tel. 1194, Integrovaný objekt - 1/11 - Barvy v počítačové grafice Barevné modely Aditivní modely RGB,
Přednáška kurzu MPOV Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář E512, tel. 1194, Integrovaný objekt - 1/11 - Barvy v počítačové grafice Barevné modely Aditivní modely RGB,
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Omezení barevného prostoru
 Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Barevné modely, práce s barvou. Martin Klíma
 Barevné modely, práce s barvou Martin Klíma Proč je barva důležitá Důležitý vizuální atribut Různá zařízení, aplikace, média Monitor Tiskárna Video Televize Světlo a barvy Elektromagnetické vlnění Viditelná
Barevné modely, práce s barvou Martin Klíma Proč je barva důležitá Důležitý vizuální atribut Různá zařízení, aplikace, média Monitor Tiskárna Video Televize Světlo a barvy Elektromagnetické vlnění Viditelná
OBRAZOVÁ ANALÝZA. Speciální technika a měření v oděvní výrobě
 OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
Úpravy rastrového obrazu
 Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V
 Kapitola 2 Barvy, barvy, barvičky 2.1 Vnímání barev Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V něm se vyskytují všechny známé druhy záření, např. gama záření či infračervené
Kapitola 2 Barvy, barvy, barvičky 2.1 Vnímání barev Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V něm se vyskytují všechny známé druhy záření, např. gama záření či infračervené
Barvy a barevné modely. Počítačová grafika
 Barvy a barevné modely Počítačová grafika Barvy Barva základní atribut pro definici obrazu u každého bodu, křivky či výplně se definuje barva v rastrové i vektorové grafice všechny barvy, se kterými počítač
Barvy a barevné modely Počítačová grafika Barvy Barva základní atribut pro definici obrazu u každého bodu, křivky či výplně se definuje barva v rastrové i vektorové grafice všechny barvy, se kterými počítač
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
12 Metody snižování barevného prostoru
 12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
Metody zvýrazňování obrazu III. Vícepásmová zvýraznění. Spektrální příznaky. Příznakový prostor. Podstata vícepásmových zvýraznění
 Podstata vícepásmových zvýraznění Metody zvýrazňování obrazu III Vícepásmová zvýraznění DN hodnoty jako příznaky a, tzv. příznakový prostor. Vytváření nových pásem s cílem zvýšit odlišení různých objektů
Podstata vícepásmových zvýraznění Metody zvýrazňování obrazu III Vícepásmová zvýraznění DN hodnoty jako příznaky a, tzv. příznakový prostor. Vytváření nových pásem s cílem zvýšit odlišení různých objektů
Multimediální systémy. 02 Reprezentace barev v počítači
 Multimediální systémy 02 Reprezentace barev v počítači Michal Kačmařík Institut geoinformatiky, VŠB-TUO Osnova přednášky Reprezentace barev v PC Způsoby míchání barev Barevné modely Bitová hloubka Barvy
Multimediální systémy 02 Reprezentace barev v počítači Michal Kačmařík Institut geoinformatiky, VŠB-TUO Osnova přednášky Reprezentace barev v PC Způsoby míchání barev Barevné modely Bitová hloubka Barvy
Teorie barev. 1. Barvený model. 2. Gamut. 3. Barevný prostor. Barevný prostor různých zařízení
 Teorie barev 1. Barvený model Barevný model představuje metodu (obvykle číselnou) popisu barev. Různé barevné modely popisují barvy, které vidíme a se kterými pracujeme v digitálních obrazech a při jejich
Teorie barev 1. Barvený model Barevný model představuje metodu (obvykle číselnou) popisu barev. Různé barevné modely popisují barvy, které vidíme a se kterými pracujeme v digitálních obrazech a při jejich
ZPRACOVÁNÍ OBRAZU přednáška 4
 ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Počítačová grafika. Studijní text. Karel Novotný
 Počítačová grafika Studijní text Karel Novotný P 1 Počítačová grafika očítačová grafika je z technického hlediska obor informatiky 1, který používá počítače k tvorbě umělých grafických objektů a dále také
Počítačová grafika Studijní text Karel Novotný P 1 Počítačová grafika očítačová grafika je z technického hlediska obor informatiky 1, který používá počítače k tvorbě umělých grafických objektů a dále také
 Michal Dobeš ZPRACOVÁNÍ OBRAZU A ALGORITMY V C# Praha 2008 Michal Dobeš Zpracování obrazu a algoritmy v C# Bez pøedchozího písemného svolení nakladatelství nesmí být kterákoli èást kopírována nebo rozmnožována
Michal Dobeš ZPRACOVÁNÍ OBRAZU A ALGORITMY V C# Praha 2008 Michal Dobeš Zpracování obrazu a algoritmy v C# Bez pøedchozího písemného svolení nakladatelství nesmí být kterákoli èást kopírována nebo rozmnožována
Zpracování obrazů. Honza Černocký, ÚPGM
 Zpracování obrazů Honza Černocký, ÚPGM 1D signál 2 Obrázky 2D šedotónový obrázek (grayscale) Několikrát 2D barevné foto 3D lékařské zobrazování, vektorová grafika, point-clouds (hloubková mapa, Kinect)
Zpracování obrazů Honza Černocký, ÚPGM 1D signál 2 Obrázky 2D šedotónový obrázek (grayscale) Několikrát 2D barevné foto 3D lékařské zobrazování, vektorová grafika, point-clouds (hloubková mapa, Kinect)
Světlo. Podstata světla. Elektromagnetické záření Korpuskulární charakter. Rychlost světla. Vlnová délka. Vlnění, foton. c = 1 079 252 848,8 km/h
 Světlo Světlo Podstata světla Elektromagnetické záření Korpuskulární charakter Vlnění, foton Rychlost světla c = 1 079 252 848,8 km/h Vlnová délka Elektromagnetické spektrum Rádiové vlny Mikrovlny Infračervené
Světlo Světlo Podstata světla Elektromagnetické záření Korpuskulární charakter Vlnění, foton Rychlost světla c = 1 079 252 848,8 km/h Vlnová délka Elektromagnetické spektrum Rádiové vlny Mikrovlny Infračervené
Programátorská dokumentace
 Programátorská dokumentace Požadavky Cílem tohoto programu bylo představit barevné systémy, zejména převody mezi nejpoužívanějšími z nich. Zároveň bylo úkolem naprogramovat jejich demonstraci. Pro realizaci
Programátorská dokumentace Požadavky Cílem tohoto programu bylo představit barevné systémy, zejména převody mezi nejpoužívanějšími z nich. Zároveň bylo úkolem naprogramovat jejich demonstraci. Pro realizaci
Digitalizace a zpracování obrazu
 Digitalizace a zpracování obrazu Jaroslav Fiřt a), Radek Holota b) a) Nové technologie výzkumné centrum Sedláčkova 15 306 14 Plzeň tel. (+420) 377236881, kl. 237 e-mail: firt@kae.zcu.cz b) Nové technologie
Digitalizace a zpracování obrazu Jaroslav Fiřt a), Radek Holota b) a) Nové technologie výzkumné centrum Sedláčkova 15 306 14 Plzeň tel. (+420) 377236881, kl. 237 e-mail: firt@kae.zcu.cz b) Nové technologie
Barva. v počítačové grafice. Poznámky k přednášce předmětu Počítačová grafika
 Barva v počítačové grafice Poznámky k přednášce předmětu Počítačová grafika Martina Mudrová 2007 Barvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové
Barva v počítačové grafice Poznámky k přednášce předmětu Počítačová grafika Martina Mudrová 2007 Barvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe. Adam Novozámský (novozamsky@utia.cas.cz)
") NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
Diskrétní 2D konvoluce
 ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
VOLBA BAREVNÝCH SEPARACÍ
 VOLBA BAREVNÝCH SEPARACÍ SOURAL Ivo Fakulta chemická, Ústav fyzikální a spotřební chemie Vysoké učení technické v Brně, Purkyňova 118, 612 00 Brno E-mail : Pavouk.P@centrum.cz K tomu aby byly pochopitelné
VOLBA BAREVNÝCH SEPARACÍ SOURAL Ivo Fakulta chemická, Ústav fyzikální a spotřební chemie Vysoké učení technické v Brně, Purkyňova 118, 612 00 Brno E-mail : Pavouk.P@centrum.cz K tomu aby byly pochopitelné
Barvy. Radek Fiala. Podpořeno z projektu FRVŠ 584/2011
 fialar@kma.zcu.cz Podpořeno z projektu FRVŠ 584/2011 Kde se berou barvy? Co je barva Světlo jako elmg. záření nemá barvu. Jednou z vlastností světla je tzv. spektrální rozdělení (Spectral Power Distribution,
fialar@kma.zcu.cz Podpořeno z projektu FRVŠ 584/2011 Kde se berou barvy? Co je barva Světlo jako elmg. záření nemá barvu. Jednou z vlastností světla je tzv. spektrální rozdělení (Spectral Power Distribution,
Grafické systémy. Obrázek 1. Znázornění elektromagnetického spektra.
 1. 1.5 Světlo a vnímání barev Pro vnímání barev je nezbytné světlo. Viditelné světlo je elektromagnetické záření o vlnové délce 400 750 nm. Různé frekvence světla vidíme jako barvy, od červeného světla
1. 1.5 Světlo a vnímání barev Pro vnímání barev je nezbytné světlo. Viditelné světlo je elektromagnetické záření o vlnové délce 400 750 nm. Různé frekvence světla vidíme jako barvy, od červeného světla
1 Jasové transformace
 1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
Analýza obrazu II. Jan Macháček Ústav skla a keramiky VŠCHT Praha
 Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost
 Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence schopnost, který je spolufinancován
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence schopnost, který je spolufinancován
Barvy v počítačové grafice
 arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 arvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové zář ení zář
arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 arvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové zář ení zář
Roman Juránek. Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 30
 Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
VY_32_INOVACE_E 15 03
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha
 Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Colors 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Rozklad spektrálních barev
Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Colors 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Rozklad spektrálních barev
DIGITÁLNÍ FOTOGRAFIE
 DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
Zobrazování barev. 1995-2015 Josef Pelikán CGG MFF UK Praha. pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/
 Zobrazování barev 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ ColorRep 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 18 Barevné schopnosti HW True-color
Zobrazování barev 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ ColorRep 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 18 Barevné schopnosti HW True-color
Zpracování obrazu a fotonika 2006
 Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám
 Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám Číslo projektu: CZ.1.07/1.5.00/34.0883 Název projektu: Rozvoj vzdělanosti Číslo šablony: III/2 Datum vytvoření: 17. 1. 2013 Autor: MgA.
Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám Číslo projektu: CZ.1.07/1.5.00/34.0883 Název projektu: Rozvoj vzdělanosti Číslo šablony: III/2 Datum vytvoření: 17. 1. 2013 Autor: MgA.
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
ROZ1 - Cv. 3 - Šum a jeho odstranění ÚTIA - ZOI
 Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Geometrická optika. Vnímání a měření barev. světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem
 Vnímání a měření barev světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem fyzikální charakteristika subjektivní vjem světelný tok subjektivní jas vlnová
Vnímání a měření barev světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem fyzikální charakteristika subjektivní vjem světelný tok subjektivní jas vlnová
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Přednáška kurzu BZVS. Barevné modely
 Přednáška kurzu BZVS Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář SD3.152, tel. 6434, Technická 12, VUT v Brně - 1/16 - Barvy v počítačové grafice Barevné modely Aditivní
Přednáška kurzu BZVS Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář SD3.152, tel. 6434, Technická 12, VUT v Brně - 1/16 - Barvy v počítačové grafice Barevné modely Aditivní
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
Základy a aplikace digitálních. Katedra radioelektroniky (13137), blok B2, místnost 722
, blok B2, místnost 722") Základy a aplikace digitálních modulací Josef Dobeš Katedra radioelektroniky (13137), blok B2, místnost 722 dobes@fel.cvut.cz 6. října 2014 České vysoké učení technické v Praze, Fakulta elektrotechnická
Základy a aplikace digitálních modulací Josef Dobeš Katedra radioelektroniky (13137), blok B2, místnost 722 dobes@fel.cvut.cz 6. října 2014 České vysoké učení technické v Praze, Fakulta elektrotechnická
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Cvičení z matematiky algebra (CZMa) Systematizace a prohloubení učiva matematiky: Číselné obory, Algebraické výrazy, Rovnice, Funkce, Posloupnosti, Diferenciální
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Cvičení z matematiky algebra (CZMa) Systematizace a prohloubení učiva matematiky: Číselné obory, Algebraické výrazy, Rovnice, Funkce, Posloupnosti, Diferenciální
Digitalizace převod AS DS (analogový diskrétní signál )
") Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
CT-prostorové rozlišení a citlivost z
 CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
31SCS Speciální číslicové systémy Antialiasing
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
ODRAZ A LOM SVĚTLA. Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika
 ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
Ing. Jan Buriánek. Katedra softwarového inženýrství Fakulta informačních technologií České vysoké učení technické v Praze Jan Buriánek, 2010
 Ing. Jan Buriánek (ČVUT FIT) Reprezentace bodu a zobrazení BI-MGA, 2010, Přednáška 2 1/33 Ing. Jan Buriánek Katedra softwarového inženýrství Fakulta informačních technologií České vysoké učení technické
Ing. Jan Buriánek (ČVUT FIT) Reprezentace bodu a zobrazení BI-MGA, 2010, Přednáška 2 1/33 Ing. Jan Buriánek Katedra softwarového inženýrství Fakulta informačních technologií České vysoké učení technické
scale n_width width center scale left center range right center range value weight_sum left right weight value weight value weight_sum weight pixel
 Změna velikosti obrázku Převzorkování pomocí filtrů Ačkoliv jsou výše uvedené metody mnohdy dostačující pro běžné aplikace, občas je zapotřebí dosáhnout lepších výsledků. Pokud chceme obrázky zvětšovat
Změna velikosti obrázku Převzorkování pomocí filtrů Ačkoliv jsou výše uvedené metody mnohdy dostačující pro běžné aplikace, občas je zapotřebí dosáhnout lepších výsledků. Pokud chceme obrázky zvětšovat
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Dodatky k FT: 1. (2D digitalizace) 2. Více o FT 3. Více k užití filtrů. 7. přednáška předmětu Zpracování obrazů
 2. Více o FT 3. Více k užití filtrů. 7. přednáška předmětu Zpracování obrazů") Dodatky k FT:. (D digitalizace. Více o FT 3. Více k užití filtrů 7. přednáška předmětu Zpracování obrazů Martina Mudrová 4 Pořízení digitálního obrazu Obvykle: Proces transformace spojité předlohy (reality
Dodatky k FT:. (D digitalizace. Více o FT 3. Více k užití filtrů 7. přednáška předmětu Zpracování obrazů Martina Mudrová 4 Pořízení digitálního obrazu Obvykle: Proces transformace spojité předlohy (reality
8. přednáška z předmětu GIS1 Rastrový datový model a mapová algebra
 8. přednáška z předmětu GIS1 Rastrový datový model a mapová algebra Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky z www.gis.zcu.cz Předmět KMA/UGI,
8. přednáška z předmětu GIS1 Rastrový datový model a mapová algebra Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky z www.gis.zcu.cz Předmět KMA/UGI,
Geometrické transformace
 1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
Barvy v počítačové grafice
 arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 24 arvy v počítačové grafice o je barva? světlo = elmg. vlnění v rozsahu 4,3. 4-7,5. 4 Hz viditelná č ást spektra rentgenové
arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 24 arvy v počítačové grafice o je barva? světlo = elmg. vlnění v rozsahu 4,3. 4-7,5. 4 Hz viditelná č ást spektra rentgenové
Digitální fotografie. Mgr. Milana Soukupová Gymnázium Česká Třebová
 Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Reprezentace bodu, zobrazení
 Reprezentace bodu, zobrazení Ing. Jan Buriánek VOŠ a SŠSE P9 Jan.Burianek@gmail.com Obsah Témata Základní dělení grafických elementů Rastrový vs. vektorový obraz Rozlišení Interpolace Aliasing, moiré Zdroje
Reprezentace bodu, zobrazení Ing. Jan Buriánek VOŠ a SŠSE P9 Jan.Burianek@gmail.com Obsah Témata Základní dělení grafických elementů Rastrový vs. vektorový obraz Rozlišení Interpolace Aliasing, moiré Zdroje
25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE
 25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE Digitalizace obrazu a komprese dat. Uveďte bitovou rychlost nekomprimovaného číslicového TV signálu a jakou šířku vysílacího pásma by s dolním částečně
25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE Digitalizace obrazu a komprese dat. Uveďte bitovou rychlost nekomprimovaného číslicového TV signálu a jakou šířku vysílacího pásma by s dolním částečně
CVIČNÝ TEST 24. OBSAH I. Cvičný test 2. Mgr. Kateřina Nováková. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe
 ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe TEORIE Morfologické operace v obraze Zdroje (7.. 0): Wikipedia EN: http://en.wikipedia.org/wiki/mathematical_morphology CMP: http://cmp.felk.cvut.cz/~hlavac/
ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe TEORIE Morfologické operace v obraze Zdroje (7.. 0): Wikipedia EN: http://en.wikipedia.org/wiki/mathematical_morphology CMP: http://cmp.felk.cvut.cz/~hlavac/
Řídící karta PCI v. 2.2 LED Panely , revize 1.0
 Popis řídící karty světelných panelů verze 2.2 Řídící karta PCI v. 2.2 LED Panely 17.9.21, revize 1. Vstupy Video signál analogový PAL / NTSC S-VIDEO konektor, CVS (kompozit) Obrazová data z PC z programu
Popis řídící karty světelných panelů verze 2.2 Řídící karta PCI v. 2.2 LED Panely 17.9.21, revize 1. Vstupy Video signál analogový PAL / NTSC S-VIDEO konektor, CVS (kompozit) Obrazová data z PC z programu
Statistika pro geografy
 Statistika pro geografy 2. Popisná statistika Mgr. David Fiedor 23. února 2015 Osnova 1 2 3 Pojmy - Bodové rozdělení četností Absolutní četnost Absolutní četností hodnoty x j znaku x rozumíme počet statistických
Statistika pro geografy 2. Popisná statistika Mgr. David Fiedor 23. února 2015 Osnova 1 2 3 Pojmy - Bodové rozdělení četností Absolutní četnost Absolutní četností hodnoty x j znaku x rozumíme počet statistických
Úvod do počítačové grafiky
 Úvod do počítačové grafiky elmag. záření s určitou vlnovou délkou dopadající na sítnici našeho oka vnímáme jako barvu v rámci viditelné části spektra je člověk schopen rozlišit přibližně 10 milionů barev
Úvod do počítačové grafiky elmag. záření s určitou vlnovou délkou dopadající na sítnici našeho oka vnímáme jako barvu v rámci viditelné části spektra je člověk schopen rozlišit přibližně 10 milionů barev
Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527
 Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U
 M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
DIGITÁLNÍ OBRAZ. Obrázky (popř. slajdy) převzaty od
 převzaty od") DIGITÁLNÍ OBRAZ JANA ŠTANCLOVÁ jana.stanclova@ruk.cuni.cz Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah fáze zpracování obrazu reprezentace obrazu digitalizace obrazu
DIGITÁLNÍ OBRAZ JANA ŠTANCLOVÁ jana.stanclova@ruk.cuni.cz Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah fáze zpracování obrazu reprezentace obrazu digitalizace obrazu
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
Vyšší odborná škola a Střední škola,varnsdorf, příspěvková organizace. Šablona 15 VY 32 INOVACE 0101 0215
 Vyšší odborná škola a Střední škola,varnsdorf, příspěvková organizace Šablona 15 VY 32 INOVACE 0101 0215 VÝUKOVÝ MATERIÁL Identifikační údaje školy Číslo projektu Název projektu Číslo a název šablony Autor
Vyšší odborná škola a Střední škola,varnsdorf, příspěvková organizace Šablona 15 VY 32 INOVACE 0101 0215 VÝUKOVÝ MATERIÁL Identifikační údaje školy Číslo projektu Název projektu Číslo a název šablony Autor
Komprese dat Obsah. Komprese videa. Radim Farana. Podklady pro výuku. Komprese videa a zvuku. Komprese MPEG. Komprese MP3.
 Komprese dat Radim Farana Podklady pro výuku Obsah Komprese videa a zvuku. Komprese MPEG. Komprese MP3. Komprese videa Velký objem přenášených dat Typický televizní signál - běžná evropská norma pracuje
Komprese dat Radim Farana Podklady pro výuku Obsah Komprese videa a zvuku. Komprese MPEG. Komprese MP3. Komprese videa Velký objem přenášených dat Typický televizní signál - běžná evropská norma pracuje
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014. 1. Obor reálných čísel
 Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Kde se používá počítačová grafika
 POČÍTAČOVÁ GRAFIKA Kde se používá počítačová grafika Tiskoviny Reklama Média, televize, film Multimédia Internetové stránky 3D grafika Virtuální realita CAD / CAM projektování Hry Základní pojmy Rastrová
POČÍTAČOVÁ GRAFIKA Kde se používá počítačová grafika Tiskoviny Reklama Média, televize, film Multimédia Internetové stránky 3D grafika Virtuální realita CAD / CAM projektování Hry Základní pojmy Rastrová
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
DZDDPZ5 Zvýraznění obrazu - prahování. Doc. Dr. Ing. Jiří Horák Ing. Tomáš Peňáz, Ph.D. Institut geoinformatiky VŠB-TU Ostrava
 DZDDPZ5 Zvýraznění obrazu - prahování Doc. Dr. Ing. Jiří Horák Ing. Tomáš Peňáz, Ph.D. Institut geoinformatiky VŠB-TU Ostrava Zvýraznění obrazu Bodová zvýraznění 1-pásmové (radiometrické), vícepásmové
DZDDPZ5 Zvýraznění obrazu - prahování Doc. Dr. Ing. Jiří Horák Ing. Tomáš Peňáz, Ph.D. Institut geoinformatiky VŠB-TU Ostrava Zvýraznění obrazu Bodová zvýraznění 1-pásmové (radiometrické), vícepásmové
Direct Digital Synthesis (DDS)
") ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Direct Digital Synthesis (DDS) Přímá číslicová syntéza Tyto materiály vznikly za podpory
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Direct Digital Synthesis (DDS) Přímá číslicová syntéza Tyto materiály vznikly za podpory
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 39
 Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 39
Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 39
EXPERIMENTÁLNÍ MECHANIKA 2 Přednáška 5 - Chyby a nejistoty měření. Jan Krystek
 EXPERIMENTÁLNÍ MECHANIKA 2 Přednáška 5 - Chyby a nejistoty měření Jan Krystek 9. května 2019 CHYBY A NEJISTOTY MĚŘENÍ Každé měření je zatíženo určitou nepřesností způsobenou nejrůznějšími negativními vlivy,
EXPERIMENTÁLNÍ MECHANIKA 2 Přednáška 5 - Chyby a nejistoty měření Jan Krystek 9. května 2019 CHYBY A NEJISTOTY MĚŘENÍ Každé měření je zatíženo určitou nepřesností způsobenou nejrůznějšími negativními vlivy,
Lineární a adaptivní zpracování dat. 3. SYSTÉMY a jejich popis ve frekvenční oblasti
 Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/ Množiny, funkce
 Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Filtrace obrazu ve frekvenční oblasti
 Filtrace obrazu ve frekvenční oblasti Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,
Filtrace obrazu ve frekvenční oblasti Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,