ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ
|
|
|
- Antonín Kopecký
- před 5 lety
- Počet zobrazení:
Transkript
1 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 2 DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc.
2 DYNAMIKA vyšetřuje pohyb hmotných útvarů vyvolaný silami Pohyb = proces změny fyzikálních veličin (výchylek, rychlostí, zrychlení, sil, napětí,..) v čase - nekmitavý pohyb (rozjezd vozidla, pád padáku, let rakety) - kmitavý pohyb (pohyb struny hudebního nástroje, pohyb vozidla po nerovné trati) je charakterizován střídavým zvětšováním a zmenšováním fyzikálních veličin F = hnací síla v = konstantní rychlost vozidla F = síla přenášená vypružením Klasická (technická) dynamika vychází z Newtonových zákonů 2. NZ ma = F (1686 Philosophiae Naturalis Principia Mathematica)
3 Kmitavý pohyb (kmitání) je průvodním jevem mnoha technických zařízení s negativními účinky - snížení životnosti - vyzařování hluku - nepříjemné účinky na člověka v dopravních prostředcích - příčina havárií spojených např. se zřícením stavebních konstrukcí Vývojové trendy a důsledky pro dynamiku rostoucí výkony, zmenšování energetické náročnosti, zvyšování bezpečnosti, spolehlivosti a šetrnosti k životnímu prostředí při materiálově úsporném konstruování technických zařízení extrémní pracovní podmínky, vysoká dynamická poddajnost možnost vzniku nestabilního pohybu a více rezonančních stavů, kdy kmitání je intenzivní rozvoj výpočtových a experimentálních metod a výpočtových prostředků (HW, SW)
4 Počítačové modelování v dynamice Zavádění nových výpočtových postupů a algoritmů umožňujících kmitání nejen analyzovat, ale též potlačovat v předvýrobních etapách



5 Elementární příklady počítačového modelování Kolaps světového obchodního centra Kritérium chování maximální síla přenášená na spodníčást stavby S max Věta o změně kinetické energie Parametry: v počáteční poloze výchozí poloha Výpočtový model v obecné poloze konečná poloha při maximálním stlačení pružiny 6 10 m = kg, h = 3,7 m, k = 7,1 10 N / m E k E 0 = W W = 0 Práce vlastní tíhy Práce pružiny mg y y k 1 2 max max = ( h + y ) k y 0 2mg k 2 2mgh k 2 max ymax = 2 max = + mg ± k S mg mg k 0 2mgh k max kymax = = 31,4 mg Dominový efekt Kolaps
6 JUMPING Úvod do modelování v mechanice (UMM) Kritérium chování maximální protažení lana y max Parametry: l0 = 20m y st = 1m Výpočtový model: Poloha: a) počáteční t = 0, y( 0) = 0, v( 0) = v0 = 2g l0 b) statické rovnováhy mg = k y st c) obecná ma = m g S (2. N zákon) 2 d y kde a = 2 (zrychlení), S = k y (síla v napnutém laně) dt 2 d y Matematický model: m + k y = m g ODR lineární, 2. řádu, 2 dt nehomogenní
7 k 2 k g Metoda řešení: ɺy + y = g, Ω = = pro t 0, T / 2 m m y st Homogenní řešení.. = Acos Ω t + Bsin Ω t pro y h t 0, T / 2 Partikulární řešení.. Výchylka skokana.. g mg y = Ω k p = = y 2 st y = y + y = A cos Ω t + Bsin Ω t + h p y st Rychlost skokana.. yɺ = AΩ sin Ω t + B Ω cos Ω t Určení integračních konstant z poč. podmínek.. 0 A + yst, v = BΩ = 0 ( 0) = 0, yɺ ( 0) = v0 2g l0 y = Výchylka skokana.. Maximální protažení lana.. v0 y = y cosω t + sin Ω t + Ω st y st y 2 max = = 2 v0 2 yst + yst + = yst + yst + 2l 0 yst 7, 4m Ω
8 Modelování kmitání systémů Nerotující systémy Základní výpočtový model (n = 1) silové buzení F(t) Parametry: m [kg] b [N/ms -1 ] k [N/m] ma ( t) S O Matematický model (2.NZ) (zrychlení), F(t).. budicí síla, S.. elastická síla, O.. tlumicí síla a =ɺxɺ Lineární matematický model m ɺɺ+ x bxɺ + kx = F t ODR 2. řádu, nehomogenní ( ) = F S = kx, O = bxɺ Cíle řešení: ( t) = bxɺ kx R + síla přenášená vazbou v čase
9 Základní výpočtový model (n = 1) kinematické buzení u(t) Parametry: m [kg] b [N/ms -1 ] k [N/m] Matematický model (2.NZ) Lineární matematický model a) mɺ x + bxɺ + kx = k u + mɺɺ x + byɺ + ky = ky ( t) buɺ ( t) = 0 ma = S O ( x u( t) ) O = b( xɺ uɺ ( t) ) S = k, b), kde deformace vazby mɺy + byɺ + ky = muɺ ( t) ( t), v( t) a( t) x, Cíle řešení: a) výchylka, rychlost, zrychlení absolutního pohybu tělesa b) deformace vazby y ( t) ( t) = byɺ ky R + y = x u ( t) síla přenášená vazbou
10 Lineární diskrétní modely systémů x q, m M, b B, k K, F, kde ( t) + Bqɺ ( t) + K q( t) f ( t) M qɺɺ = ( t) = f ( t) uɺ ( t) uɺ ( t) M... matice hmotnosti B matice tlumení K matice tuhosti q(t) vektor výchylek (zobecněných souřadnic) f(t) vektor buzení soustava vázaných ODR 2. řádu o počtu n Odvození: - z D Alembertova principu (D Alembert ) - z Lagrangeových rovnic pohybu (Lagrange ) - metodou konečných prvků (MKP od r. 1950) - z měřených veličin identifikačními metodami Vlastnosti systémů jsou nejčastěji vyjádřeny: - vlastními frekvencemi, vlastními čísly a vlastními vektory - odezvou na buzení v časové nebo ve frekvenční oblasti
11 APLIKACE Seizmická odezva primárního okruhu JE Dukovany - Vytvořit model rozsáhlého systému tvořeného reaktorem a šesti chladicími smyčkami - Vyvinout metodu modelování založenou na dekompozici systému na subsystémy (reaktor a smyčky), modelování subsystémů (MATLAB) modelování vazeb mezi subsystémy (ANSYS) a vytvořit model primárního okruhu s redukovaným počtem stupňů volnosti (MATLAB) - Analyzovat vliv tlumičů umístěných v potrubních systémech smyček pro zvýšení seizmické odolnosti
12
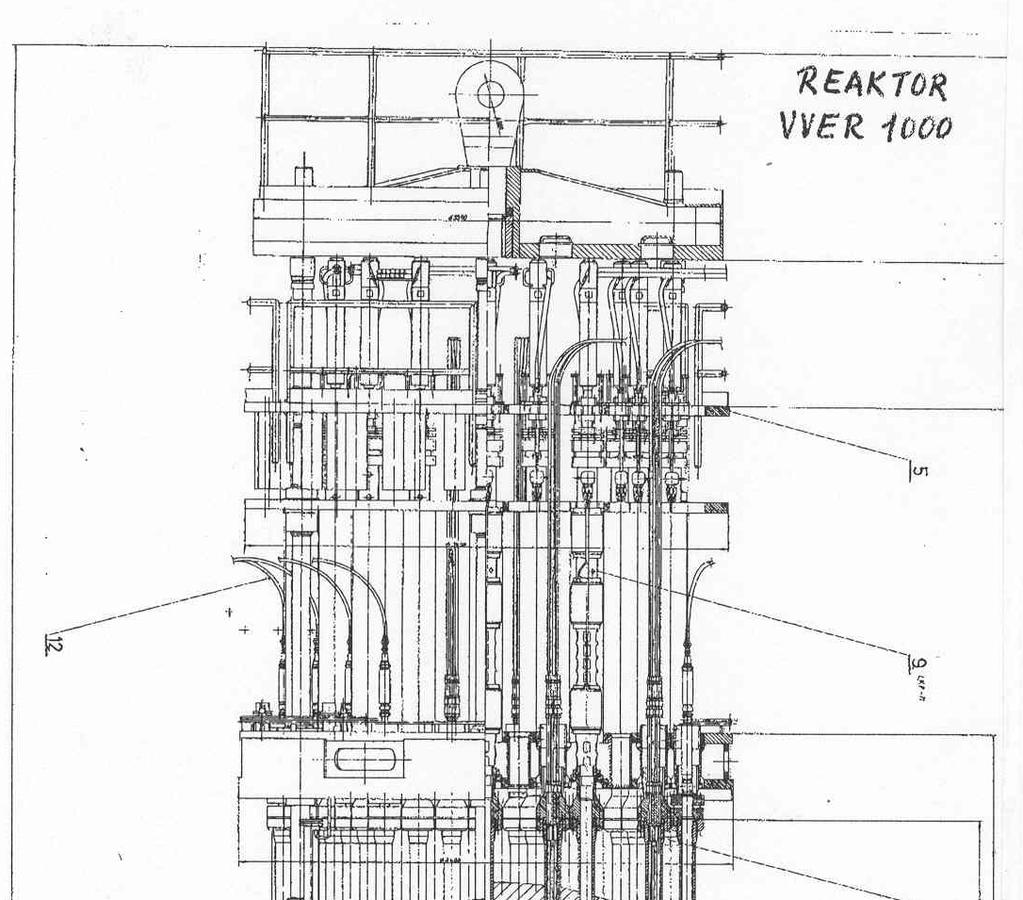
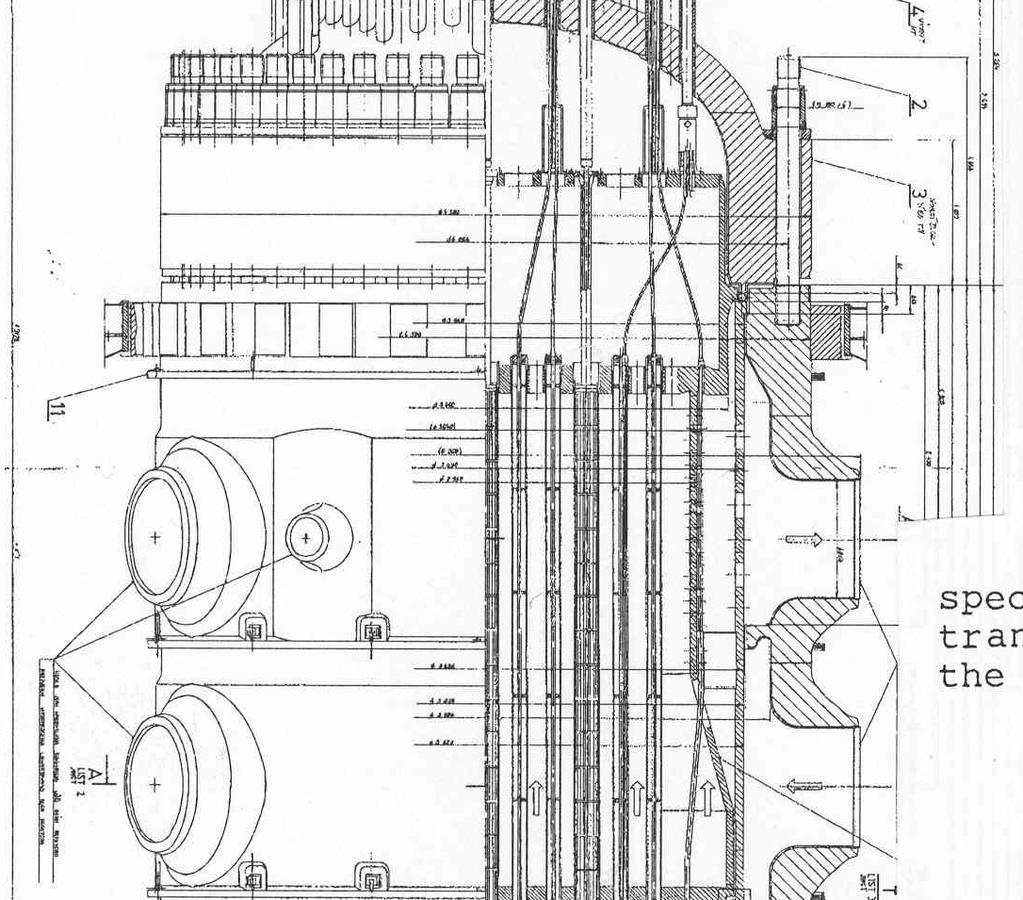
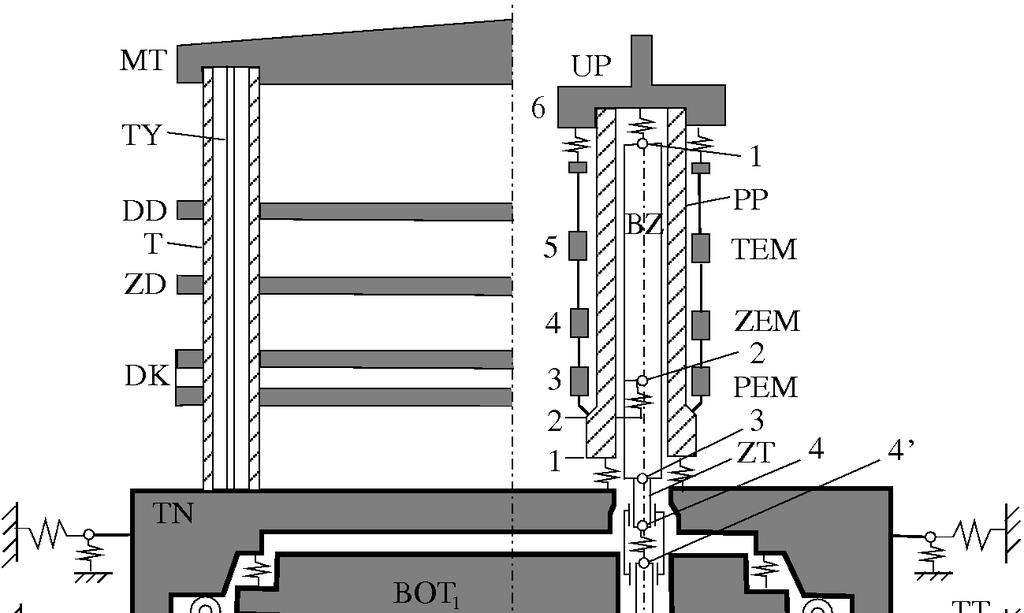
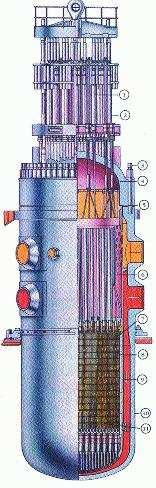
13 Dynamická odezva reaktoru VVER 1000 JE Temelín vybuzená tlakovými pulsacemi generovanými cirkulačními čerpadly - Vytvořit prostorový model reaktoru - Vyšetřit záznějové vibrace komponent reaktoru vybuzené tlakovými pulsacemi čerpadel s mírně odlišnými otáčkami (MATLAB) - Stanovit podmínky pro zajištění kontaktu ve stykových plochách vnitřních vazeb reaktoru


14 Úvod do modelování v mechanice (UMM)
15 Orbity na ose tlakové nádoby v místě přechodu válcovéčásti do eliptického dna pro konfiguraci čerpadel


16 Časové průběhy příčných výchylek uzlů komponent reaktoru a deformace v uzlu zavěšení nosného válce d NV
17 Modelování a dynamická odezva podvozku kolejového vozidla vybuzená vertikální nerovností tratě - Vytvořit model (tzv. individuálního) pohonu dvojkolí kolejového vozidla vyvíjeného ve ŠKODA TRANSPORTATION pro rychlost 200 km/h - Vytvořit linearizovaný model celého podvozku se dvěma individuálními pohony při uvažování nerovností tratě - Vypočítat extrémní dynamické zatížení komponent podvozku pro jeho dimenzování stochastickou metodou ve frekvenční oblasti (MATLAB)


18



19
20 Počítačová simulace kmitání a dynamického zatížení podvozku kolejového vozidla při jízdě po nerovné trati - Vytvořit nelineární model celého podvozku při uvažování nelineárního charakteru kontaktních sil ve styku kol s kolejnicemi a vertikálních i příčných nerovností kolejnic - Simulovat kontaktní síly, síly přenášené silentbloky pružného uložení motorů a vertikální výchylky vozidla, rámu podvozku a dvojkolí (MATLAB)
21 Popis buzení pomocí nerovností tratě Left rail Prostorova zavislost vychylky zleft Right rail Prostorova zavislost vychylky zright [m] 0 [m] x [m] x [m] x [m] x [m] Left rail 10 x 10-3 Prostorova zavislost vychylky yleft Right rail Prostorova zavislost vychylky yright [m] 2 0 [m] x [m] x [m] x [m] x [m]
22
23 Contact wheel forces Úvod do modelování v mechanice (UMM)
24 Forces in silentblocks Úvod do modelování v mechanice (UMM) Vertical displacements of the car body (v CB), wheelset axle node (v WS) and bogie frame (v BF)
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Téma 13, Úvod do dynamiky stavebních konstrukcí dynamiky
 Statika staveních konstrukcí II., 3.ročník akalářského studia Téma 3, Úvod do dynamiky staveních konstrukcí dynamiky Úvod Vlastní kmitání Vynucené kmitání Tlumené kmitání Podmínky dynamické rovnováhy konstrukcí
Statika staveních konstrukcí II., 3.ročník akalářského studia Téma 3, Úvod do dynamiky staveních konstrukcí dynamiky Úvod Vlastní kmitání Vynucené kmitání Tlumené kmitání Podmínky dynamické rovnováhy konstrukcí
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Téma: Dynamika - Úvod do stavební dynamiky
 Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU
 SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Příklady kmitavých pohybů. Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Nelineární úlohy při výpočtu konstrukcí s využitím MKP
 Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
OTÁZKY KE STÁTNÍ ZÁVĚREČNÉ ZKOUŠCE (NAVAZUJÍCÍ STUDIUM) OBOR 3901T APLIKOVANÁ MECHANIKA. Teorie pružnosti
 OBOR 3901T APLIKOVANÁ MECHANIKA. Teorie pružnosti") OTÁZKY KE STÁTNÍ ZÁVĚREČNÉ ZKOUŠCE (NAVAZUJÍCÍ STUDIUM) OBOR 3901T003-00 APLIKOVANÁ MECHANIKA Teorie pružnosti 1. Geometrie polohových změn a deformace tělesa. Tenzor přetvoření Green-Lagrangeův, Cauchyho.
OTÁZKY KE STÁTNÍ ZÁVĚREČNÉ ZKOUŠCE (NAVAZUJÍCÍ STUDIUM) OBOR 3901T003-00 APLIKOVANÁ MECHANIKA Teorie pružnosti 1. Geometrie polohových změn a deformace tělesa. Tenzor přetvoření Green-Lagrangeův, Cauchyho.
5 Analýza konstrukce a navrhování pomocí zkoušek
 5 Analýza konstrukce a navrhování pomocí zkoušek 5.1 Analýza konstrukce 5.1.1 Modelování konstrukce V článku 5.1 jsou uvedeny zásady a aplikační pravidla potřebná pro stanovení výpočetních modelů, které
5 Analýza konstrukce a navrhování pomocí zkoušek 5.1 Analýza konstrukce 5.1.1 Modelování konstrukce V článku 5.1 jsou uvedeny zásady a aplikační pravidla potřebná pro stanovení výpočetních modelů, které
Zvýšení kvality jízdní dráhy ve výhybkách pomocí zpružnění
 Zvýšení kvality jízdní dráhy ve výhybkách pomocí zpružnění Ing. Smolka, M. Doc. Ing. Krejčiříková, H., CSc. Prof. Ing. Smutný, J., Ph.D. DT - Výhybkárna a strojírna, a.s., Prostějov www.dtvm.cz Konference
Zvýšení kvality jízdní dráhy ve výhybkách pomocí zpružnění Ing. Smolka, M. Doc. Ing. Krejčiříková, H., CSc. Prof. Ing. Smutný, J., Ph.D. DT - Výhybkárna a strojírna, a.s., Prostějov www.dtvm.cz Konference
NEPRŮZVUČNOST A KROČEJOVÝ ZVUK
 NEPRŮZVUČNOST A KROČEJOVÝ ZVUK Typy konstrukcí jednoduchá vrstvená dvojitá kombinovaná složená Víceprvkové konstrukce Vzduchová neprůzvučnost konstrukcí o více než dvou prvcích zpravidla není vyšší než
NEPRŮZVUČNOST A KROČEJOVÝ ZVUK Typy konstrukcí jednoduchá vrstvená dvojitá kombinovaná složená Víceprvkové konstrukce Vzduchová neprůzvučnost konstrukcí o více než dvou prvcích zpravidla není vyšší než
Návrh parametrů inertoru pro zlepšení vypružení vozidla
 Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. )
") ( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů.
 Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Snižování hlukové emise moderní automobilové převodovky
 Snižování hlukové emise moderní automobilové převodovky Obhajoba disertační práce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2009 Obsah Úvod do problematiky Vymezení
Snižování hlukové emise moderní automobilové převodovky Obhajoba disertační práce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2009 Obsah Úvod do problematiky Vymezení
43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu.
 43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu. Popis aktivity Návrh a realizace řídicích algoritmů pro lineární elektrický motor použitý jako poloaktivní aktuátor tlumení pérování
43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu. Popis aktivity Návrh a realizace řídicích algoritmů pro lineární elektrický motor použitý jako poloaktivní aktuátor tlumení pérování
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů.
 Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);
, který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);") Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Experimentální dynamika (motivace, poslání, cíle)
") Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
DYNAMICKÁ ANALÝZA KMITÁNÍ S VÍCE STUPNI VOLNOSTI
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
mezinárodní konference 60 LET PRO JADERNOU ENERGETIKU 60 let jaderného průmyslu a 65 let vysokého technického školství v Plzni
 mezinárodní konference 60 LET PRO JADERNOU ENERGETIKU 12. a 13. května 2016, angelo HOTEL PILSEN, Plzeň 60 let jaderného průmyslu a 65 let vysokého technického školství v Plzni Nezanedbatelná pozice společností
mezinárodní konference 60 LET PRO JADERNOU ENERGETIKU 12. a 13. května 2016, angelo HOTEL PILSEN, Plzeň 60 let jaderného průmyslu a 65 let vysokého technického školství v Plzni Nezanedbatelná pozice společností
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Software pro modelování chování systému tlakové kanalizační sítě Popis metodiky a ukázka aplikace
 Optimalizace systémů tlakových kanalizací pomocí matematického modelování jejich provozních stavů Software pro modelování chování systému tlakové kanalizační sítě Popis metodiky a ukázka aplikace Ing.
Optimalizace systémů tlakových kanalizací pomocí matematického modelování jejich provozních stavů Software pro modelování chování systému tlakové kanalizační sítě Popis metodiky a ukázka aplikace Ing.
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB D24FZS
 OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu
 Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
KMS cvičení 9. Ondřej Marek
 KMS cvičení 9 Ondřej Marek SYSTÉM S n DOF ŘEŠENÍ V MODÁLNÍCH SOUŘADNICÍCH Pohybové rovnice lineárního systému: U je modální matice, vlastní vektory u 1, u 2,..., u n jsou sloupce v matici U x - vektor
KMS cvičení 9 Ondřej Marek SYSTÉM S n DOF ŘEŠENÍ V MODÁLNÍCH SOUŘADNICÍCH Pohybové rovnice lineárního systému: U je modální matice, vlastní vektory u 1, u 2,..., u n jsou sloupce v matici U x - vektor
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických
 Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Technické výpočty = virtuální zajištění funkčnosti vozu (FEM)
") Technické výpočty = virtuální zajištění funkčnosti vozu (FEM) Jiří Ota Škoda Auto TF/1 Technické výpočty a aerodynamika 3.12.2010 Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Technické výpočty = virtuální zajištění funkčnosti vozu (FEM) Jiří Ota Škoda Auto TF/1 Technické výpočty a aerodynamika 3.12.2010 Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Pružnost a pevnost. zimní semestr 2013/14
 Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
STUDENT CAR. Dílčí výpočtová zpráva. Univerzita Pardubice Dopravní fakulta Jana Pernera. Září 2008
 STUDENT CAR Dílčí výpočtová zpráva Září 2008 Copyright 2008, Univerzita Pardubice, STUDENT CAR Dílčí výpočtová zpráva Projekt : Student Car, FDJP Univerzita Pardubice - VŠB Ostrava Datum : Září 2008 Vypracoval
STUDENT CAR Dílčí výpočtová zpráva Září 2008 Copyright 2008, Univerzita Pardubice, STUDENT CAR Dílčí výpočtová zpráva Projekt : Student Car, FDJP Univerzita Pardubice - VŠB Ostrava Datum : Září 2008 Vypracoval
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Řešení úloh 1. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů. = 30 s.
 Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
obhajoba diplomové práce
 České vysoké učení technické v Praze, Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky obhajoba diplomové práce v Praze, srpen 2014 autor: vedoucí: Ing. Pavel Steinbauer, Ph.D. Modální zkouška
České vysoké učení technické v Praze, Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky obhajoba diplomové práce v Praze, srpen 2014 autor: vedoucí: Ing. Pavel Steinbauer, Ph.D. Modální zkouška
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
1. Regulace otáček asynchronního motoru - skalární řízení
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Ing. Václav Losík. Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA
 Ing. Václav Losík Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA Obr. 0 Ocelový otočný sloupový jeřáb OS 5/5 MD I. Popis objektu a úlohy Jedná se o ocelový otočný sloupový jeřáb
Ing. Václav Losík Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA Obr. 0 Ocelový otočný sloupový jeřáb OS 5/5 MD I. Popis objektu a úlohy Jedná se o ocelový otočný sloupový jeřáb
3 Mechanická energie 5 3.1 Kinetická energie... 6 3.3 Potenciální energie... 6. 3.4 Zákon zachování mechanické energie... 9
 Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
DYNAMICKÁ ANALÝZA A OPTIMALIZACE
 Závěrečná výzkumná zpráva z řešení projektu FRVŠ 2282/2003/G1 DYNAMICKÁ ANALÝZA A OPTIMALIZACE PŘEVODOVÝCH ÚSTROJÍ Michal HAJŽMAN Miroslav BYRTUS Vladimír ZEMAN Katedra mechaniky, Univerzitní 22, 30614,
Závěrečná výzkumná zpráva z řešení projektu FRVŠ 2282/2003/G1 DYNAMICKÁ ANALÝZA A OPTIMALIZACE PŘEVODOVÝCH ÚSTROJÍ Michal HAJŽMAN Miroslav BYRTUS Vladimír ZEMAN Katedra mechaniky, Univerzitní 22, 30614,
Numerické metody. Numerické modelování v aplikované geologii. David Mašín. Ústav hydrogeologie, inženýrské geologie a užité geofyziky
 Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Laboratorní úloha č. 4 - Kmity II
 Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Fyzika - Sexta, 2. ročník
 - Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
- Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
MODELOVÁNÍ POHYBU MECHANISMŮ (ADAMS)
") MODELOVÁNÍ POHYBU MECHANISMŮ (ADAMS) Obsah 1. Multibody dynamika 2. Dynamika silničních vozidel 3. Silniční prostředky hromadné dopravy 4. Cisternový návěs 5. Kolejová vozidla 6. Jaderné strojírenství
MODELOVÁNÍ POHYBU MECHANISMŮ (ADAMS) Obsah 1. Multibody dynamika 2. Dynamika silničních vozidel 3. Silniční prostředky hromadné dopravy 4. Cisternový návěs 5. Kolejová vozidla 6. Jaderné strojírenství
DYNAMIKA - Dobový a dráhový účinek
 Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň, Klatovská 109 Tento projekt
Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň, Klatovská 109 Tento projekt
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
1. Řešená konstrukce Statické řešení Výpočet průhybové čáry Dynamika Vlastní netlumené kmitání...
 . Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
. Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Fyzika - Kvinta, 1. ročník
 - Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
- Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník
 EVROPSKÝ SOCIÁLNÍ FOND Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky
EVROPSKÝ SOCIÁLNÍ FOND Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky
PBS Velká Bíteš. Profil společnosti
 PBS Velká Bíteš Profil společnosti 65 let ve Velké Bíteši Patříme do skupiny PBS Group QM Řízení jakosti Průmyslové kotle Turbíny Divize letecké techniky Divize přesného lití Divize industry Divize centrum
PBS Velká Bíteš Profil společnosti 65 let ve Velké Bíteši Patříme do skupiny PBS Group QM Řízení jakosti Průmyslové kotle Turbíny Divize letecké techniky Divize přesného lití Divize industry Divize centrum
Fyzikální vzdělávání. 1. ročník. Učební obor: Kuchař číšník Kadeřník. Implementace ICT do výuky č. CZ.1.07/1.1.02/ GG OP VK
 Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální praktikum 1
 Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
MODELOVÁNÍ KMITÁNÍ DYNAMICKÉ SOUSTAVY S VÍCE STUPNI VOLNOSTI
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í
 DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
Propojení matematiky, fyziky a počítačů
 Propojení matematiky, fyziky a počítačů Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ..7/.3./45.9 V Ústí n. L., únor 5 Ing. Radek Honzátko, Ph.D. Propojení matematiky, fyziky a počítačů
Propojení matematiky, fyziky a počítačů Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ..7/.3./45.9 V Ústí n. L., únor 5 Ing. Radek Honzátko, Ph.D. Propojení matematiky, fyziky a počítačů
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu
 Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
MECHANICKÉ KMITÁNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Vozíky Graf Toku Výkonu
 Graf Toku Výkonu Michal Menkina, Petr Školník TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ..07/2.2.00/07.0247, který
Graf Toku Výkonu Michal Menkina, Petr Školník TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ..07/2.2.00/07.0247, který
Spolehlivost a bezpečnost staveb zkušební otázky verze 2010
 1 Jaká máme zatížení? 2 Co je charakteristická hodnota zatížení? 3 Jaké jsou reprezentativní hodnoty proměnných zatížení? 4 Jak stanovíme návrhové hodnoty zatížení? 5 Jaké jsou základní kombinace zatížení
1 Jaká máme zatížení? 2 Co je charakteristická hodnota zatížení? 3 Jaké jsou reprezentativní hodnoty proměnných zatížení? 4 Jak stanovíme návrhové hodnoty zatížení? 5 Jaké jsou základní kombinace zatížení
Kontraktantní/dilatantní
 Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Mechanické kmitání - určení tíhového zrychlení kyvadlem
 I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Laboratorní práce č. 9 Mechanické kmitání - určení
13 otázek za 1 bod = 13 bodů Jméno a příjmení:
 13 otázek za 1 bod = 13 bodů Jméno a příjmení: 4 otázky za 2 body = 8 bodů Datum: 1 příklad za 3 body = 3 body Body: 1 příklad za 6 bodů = 6 bodů Celkem: 30 bodů příklady: 1) Sportovní vůz je schopný zrychlit
13 otázek za 1 bod = 13 bodů Jméno a příjmení: 4 otázky za 2 body = 8 bodů Datum: 1 příklad za 3 body = 3 body Body: 1 příklad za 6 bodů = 6 bodů Celkem: 30 bodů příklady: 1) Sportovní vůz je schopný zrychlit
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Sběrače proudu typu SPL 26 a SPL 30
 Sběrače proudu typu SPL 26 a SPL 3 Vývoj, zkoušky a zkušební provoz 1 Vývoj a zkoušky Cíle vývoje: Sběrač dle EN 526-2 pro vozidla lehké stavby a tramvaje Max. rychlost do 1 km/h Snadná adaptovatelnost
Sběrače proudu typu SPL 26 a SPL 3 Vývoj, zkoušky a zkušební provoz 1 Vývoj a zkoušky Cíle vývoje: Sběrač dle EN 526-2 pro vozidla lehké stavby a tramvaje Max. rychlost do 1 km/h Snadná adaptovatelnost
JEDNOTKY. E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze. Abstrakt
 SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
Centrum kompetence automobilového průmyslu Josefa Božka - AutoSympo a Kolokvium Božek 2. a , Roztoky -
 Popis obsahu balíčku Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a WP15: Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a Vedoucí konsorcia podílející se
Popis obsahu balíčku Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a WP15: Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a Vedoucí konsorcia podílející se