PATENTOVÝ SPIS ^ L. 16 O) (N SI. (11) Číslo dokumentu: ČESKÁ REPUBLIKA. (21) Čislo pflhláiky: (13) Druh dokumentu: B6
|
|
|
- Miloslav Liška
- před 9 lety
- Počet zobrazení:
Transkript
1 PATENTOVÝ SPIS ČESKÁ REPUBLIKA (19) (21) Čislo pflhláiky: (22) PMhláieno: (40) Zvefejnino: (47) Udíleno: (24) Oznámeno udílení ve Věstníku: (11) Číslo dokumentu: (13) Druh dokumentu: B6 (51)lnt.Cl. 6 : G 21 C 17/017 B 25 J 11/00 ÚŘAD PRŮMYSLOVÉHO VLASTNICTVÍ (73) Majitel patentu: Mátal Oldřich lng. CSc, Brno, CZ; Holý František, Brno, CZ; Klinga Jozef ing., Šlapanice, CZ; (72) Původce vynálezu: Mátal Oldřich ing. CSc. Brno, CZ; Holý František, Brno, CZ; Klinga Jozef ing.. Šlapanice. CZ; (54) Název vynálezu: Manipulátor pro vyhledáváni netěsností v kolektorech,v teplosměnných trubkách a v jejich spojích s kolektory u parních generátorů typu WER při odstávce bloku ^ L. 16 CĎ CD (57) Anotace: Zařízení sestává z dutého sloupu (1), který Je opatřen na konci orientovaném pod nosnou deskou (2) připojovací deskou (29), Je suvně veden v ložiskách (3), vytvořených v nosné trubce (4), k níž Je fixováno ovládací kolo (5). Na něm Je upevnén pohon (15) svislého pohybu dutého sloupu (1). ovládací kolo (5) Je pevně uchycené na nosné trubce (4) otočně vedené v ložiskovém lůžku (6), vytvořeném na nosné desce (2), k níž Je upevněn pohon (13) otáčivého pohybu opatřený hnacím prvkem (17), napojeným na ovládací kolo (5) a současně Je v Její spodní části orientované pod nosnou deskou (2) upevněn držák (8) pro závěs (9) videomodulu. O) (N SI o
 Původce vynálezu: Mátal Oldřich ing. CSc. Brno, CZ; Holý František, Brno, CZ; Klinga Jozef ing.. Šlapanice.")
2 Manipulátor pro vyhledávání netěsností v kolektorech, v teplosměnných trubkách a v jejich spojích s kolektory u parních generátorů typu WER při odstávce bloku Oblast techniky Vynález se týká manipulátoru pro vyhledávání netěsností v kolektorech, v teplosměnných trubkách a v jejich spojích s kolektory u parních generátorů typu WER při odstávce bloku, který je opatřen dutým sloupem, na jehož jednom konci je vodotěsně napojena uzavřená komora s vodotěsným uzavírátelným průzorem a s vestavěnou tel-evizní kamerou a světelnými zdroji. Dosavadní stav techniky Pro vyhledávání netěsností v primárních kolektorech, v teplosměnných trubkách a ve spojích těchto trubek s primárními kolektory u parních generátorů typu WER je dosud známo jediné provedení manipulátoru. Tento manipulátor je řešen dutým sloupem, jehož jeden konec je nerozebíratelně napojen na uzavřenou komoru, opatřenou vodotěsně uzavíratelným průzorem. Ve vnitřku uzavřené komory je vestavěna televizní kamera a alespoň jeden zdroj světla. Na druhém konci je dutý sloup vybaven závěsem, na nějž navazuje závěsné lano, vedené závěsnou konstrukcí s kladkou, která je situována samostatně nad ním a závěsné lano je ukončené v pohonu, upevněném na nosné desce manipulátoru. Dutý sloup ja dále otočně a vsuvně veden v ložiskových vyhotoveních v nosné "Crubce, která je zakotvena v nosné desce. Nosná deska je opatřena alespoň jedním průzorem a je zachycena na horní přírubové části primárního kolektoru parního generátoru typu WER. Uzavíratelný vodotěsný průzor na uzavřené komoře leží v rovině rovnoběžné s podélnou osou dutého sloupu a optická osa televizní kamery v uzavřené komoře je kolmá na podélnou osu dutého sloupu. Na vnějším povrchu dutého sloupu je alespoň jedna zarážka. Na konci nosné trubky, vzdálenějším od uzavřené komory je upevněn směrový kotouč, nad kterým je na objímce zachycené na dutém sloupu upevněn směrový ukazatel. Manipulátor vyžaduje trvalou přítomnost části obsluhujícího personálu v prostoru ústí primárních kolektorů. I když se takto provedený manipulátor v praxi principiálně osvědčil, projevila se u něj řada nevýhod. Řešení se samostatnou závěsnou konstrukcí nad manipulátorem a pohonem závěsného lana, fixovaným na nosné desce způsobuje montážní komplikace a navozuje kritické situace z hlediska bezpečnosti práce. Manipulátor svým řešením umožňuje pouze svislý, dálkově ovladatelný pohyb dutého sloupu. Protože je dutý sloup veden jak otočně, tak i současně suvně v ložiskách vyhotovených v nosné trubce, lze obvodovou polohu uzavřené komory v primárním kolektoru fixovat jen ručně tak, že pracovníci trvale, po celou dobu několika hodin musí stát v blízkosti otevřeného ústí primárních kolektorů testovaného parního generátoru, u nosné desky manipulátoru a ručně ovládat dutý sloup. Po celou tuto dobu jsou vystaveni zvýšeným radiačním dávkám, jejichž zdrojem jsou kombinované vnitřní povrchy primárních kolektorů parního generátoru, což je z hlediska zdraví pracovníků a z hlediska bezpečnosti práce nežádoucí. Další nevýhodou stávajícího řešení je nepřesná lokalizace netěsnosti pomocí směrového kotouče a ukazovatele. Navíc globální informace o netěsnostech, které se projevují na volné hladině vody v primárním kolektoru -1-

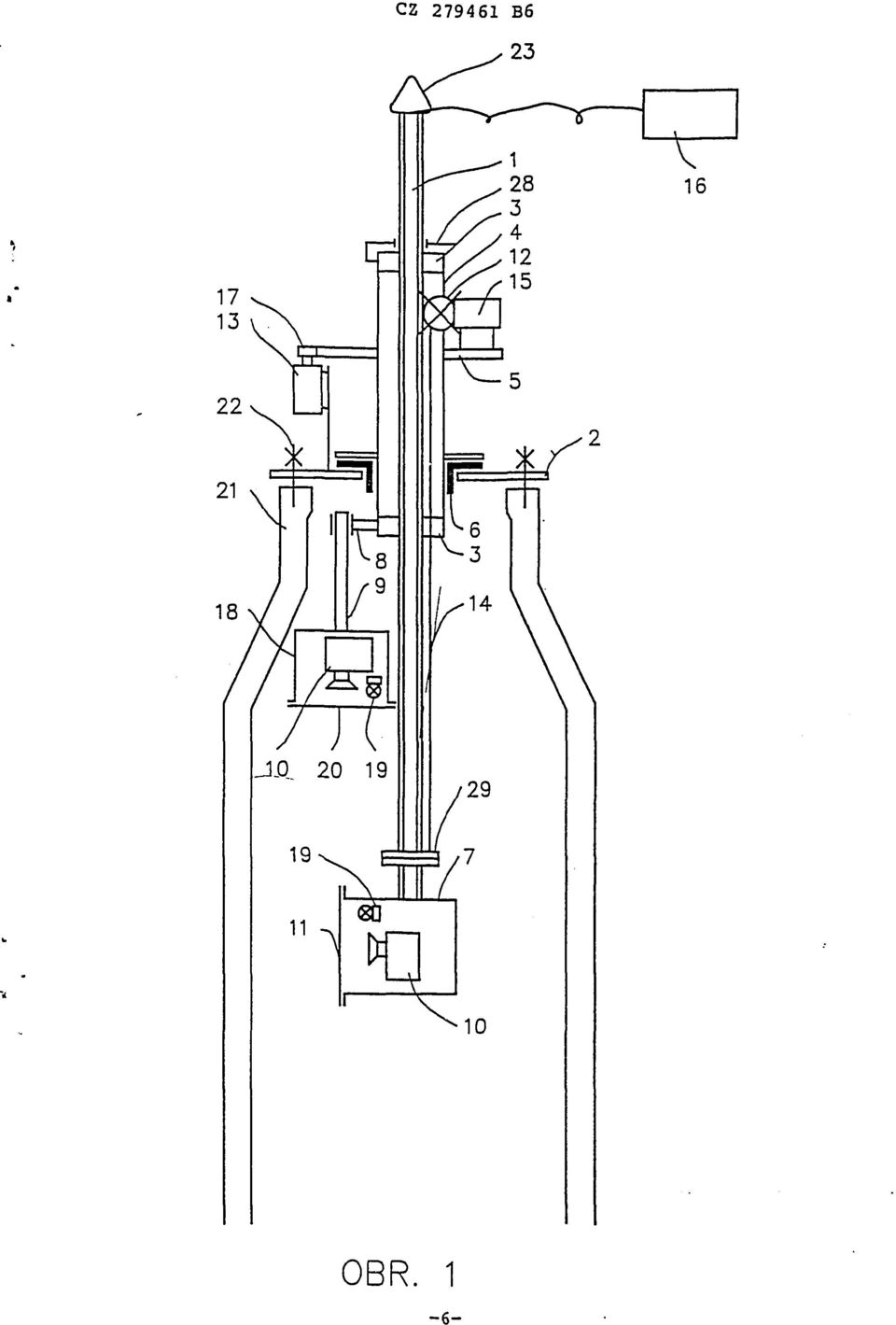
3 lze získat jen pozorováním okem přes průzory v nosné desce. I to zvyšuje dávkové příkony ze záření obsluhujícího personálu. Dále manipulátor není vybaven pomocným zařízením pro přípravu na vyhledávání netěsností v teplosměnných trubkách, což z hlediska úspěšnosti vyhledání se ukázalo jako významné. Manipulátor není vybaven fixačním zařízením dutého sloupu ve svislém směru pro možnost jeho transportu do primárního kolektoru a po ukončení práce k jeho transportu z primárního kolektoru do prostoru uskladnění. Konečně manipulátor není vybaven přídavným modulem pro místní vysušování netěsných teplosměnných trubek před jejich zaslepením záslepkou. Podstata vynálezu Uvedené nedostatky do značné míry odstraňuje manipulátor pro vyhledávání netěsností v kolektorech, v teplosměnných trubkách a v jejich spojích a kolektory u parních generátorů typu WER při odstávce bloku, jehož podstata spočívá v tom, že dutý sloup opatřený na konci orientovaném pod nosnou deskou připojovací deskou je suvně veden v ložiskách, vytvořených v nosné trubce, k níž je fixováno ovládací kolo, na němž je upevněn pohon svislého pohybu dutého sloupu, ovládací kolo je pevně uchycené na nosné trubce, otočně vedené na ložiskovém lůžku, vytvořeném na nosné desce, k níž je upevněn pohon otáčivého pohybu, opatřený hnacím prvkem, napojeným na ovládací kolo a současně je v její spodní části orientované pod nosnou deskou upevněn držák pro závěs videomodulu. Na pohon svislého pohybu je napojen otočný buben se závěsným lanem, které částečně prochází nosnou trubkou, přičemž na závěsném lanu je zavěšena připojovací deska dutého sloupu. Alternativně je pohon sloupu opatřen podávacím kolem, zabírajícím do hřebenu, jež je vytvořen po délce dutého sloupu. Další alternativou je, že v držáku je suvně upevněn závěs videomodulu, k němuž je vodotěsně připevněna komora videomodulu opatřená průzorem, v komoře jsou upevněny zdroj světla a televizní kamera tak, že její optická osa je s výhodou kolmá na průzor a rovnoběžná s podélnou osou dutého sloupu. Na konci dutého sloupu může být na připojovací desku vodotěsně napojen pomocný modul opatřený čerpadlem s tryskou na jeho výtlaku, přičemž osa připojovací desky je kolmá k podélné ose dutého sloupu. Dále na připojovací desku lze vodotěsně upevnit uzavřenou komoru a přídavný modul, tvořený vodotěsnou komorou, opatřenou trubkou s nástavcem a pohonem trubky, která je propojena pružnou hadicí se zásobníkem horkého tlakového vzduchu opatřeného ohřevem. Televizní kamery, zdroje světla, čerpadlo, pohon otáčivého pohybu a pohon svislého pohybu jsou rozebíratelně propojeny s ovládacím zařízením situovaným například v reaktorovém sále. Předností manipulátoru je, že jej lze ovládat na dálku bez přítomnosti personálu u netěsného primárního generátoru a lze v něm vyhledávat netěsnosti a lokalizovat je. Přitom vyhledáváni je jednoznačné a objektivní, netěsnosti lze definovat místně a velikostí hodnocením toku energie testovacího plynu, protékajícího netěsností.řešení s videomodulem dovoluje na dálku pozorovat -2-

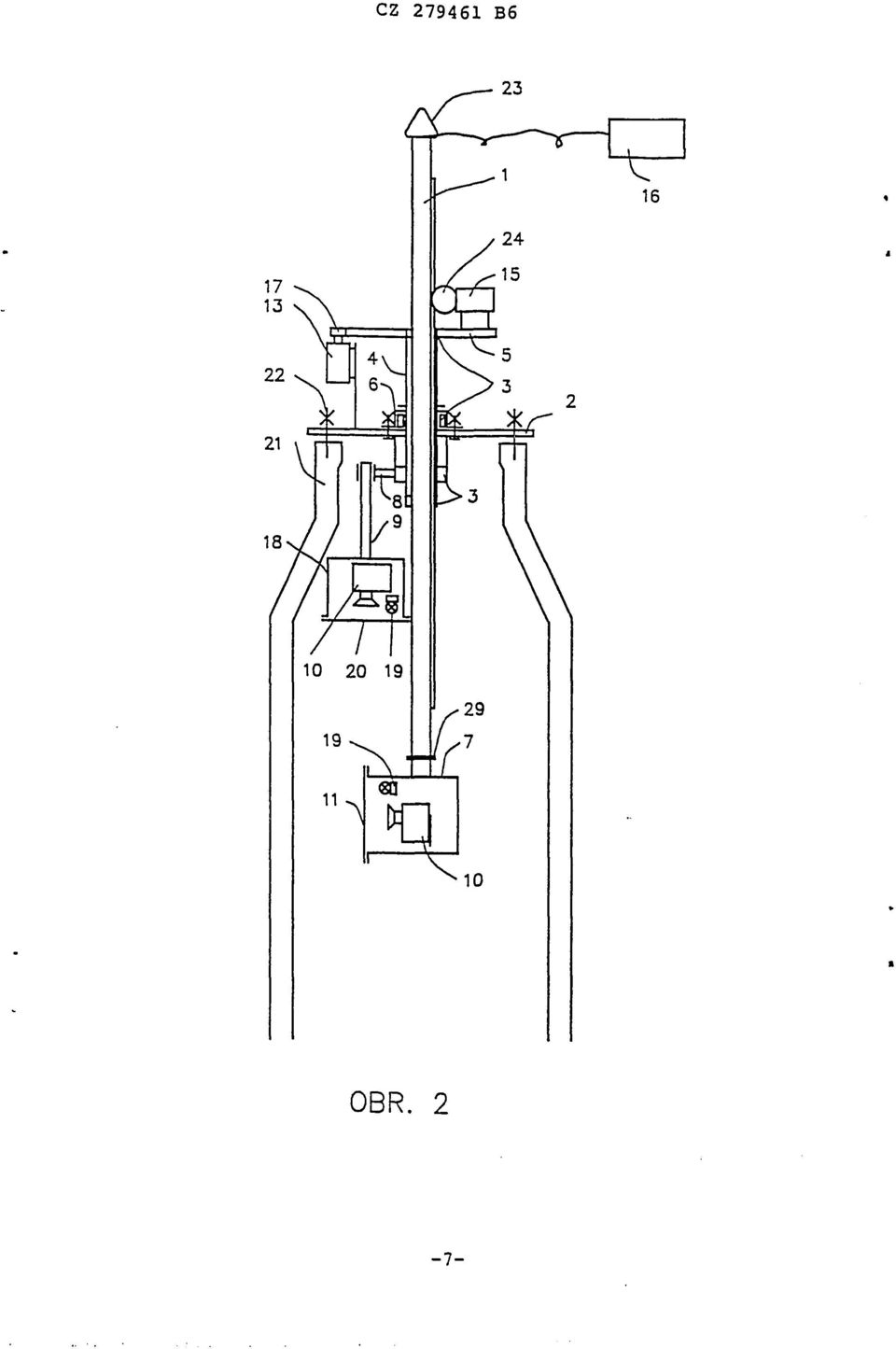
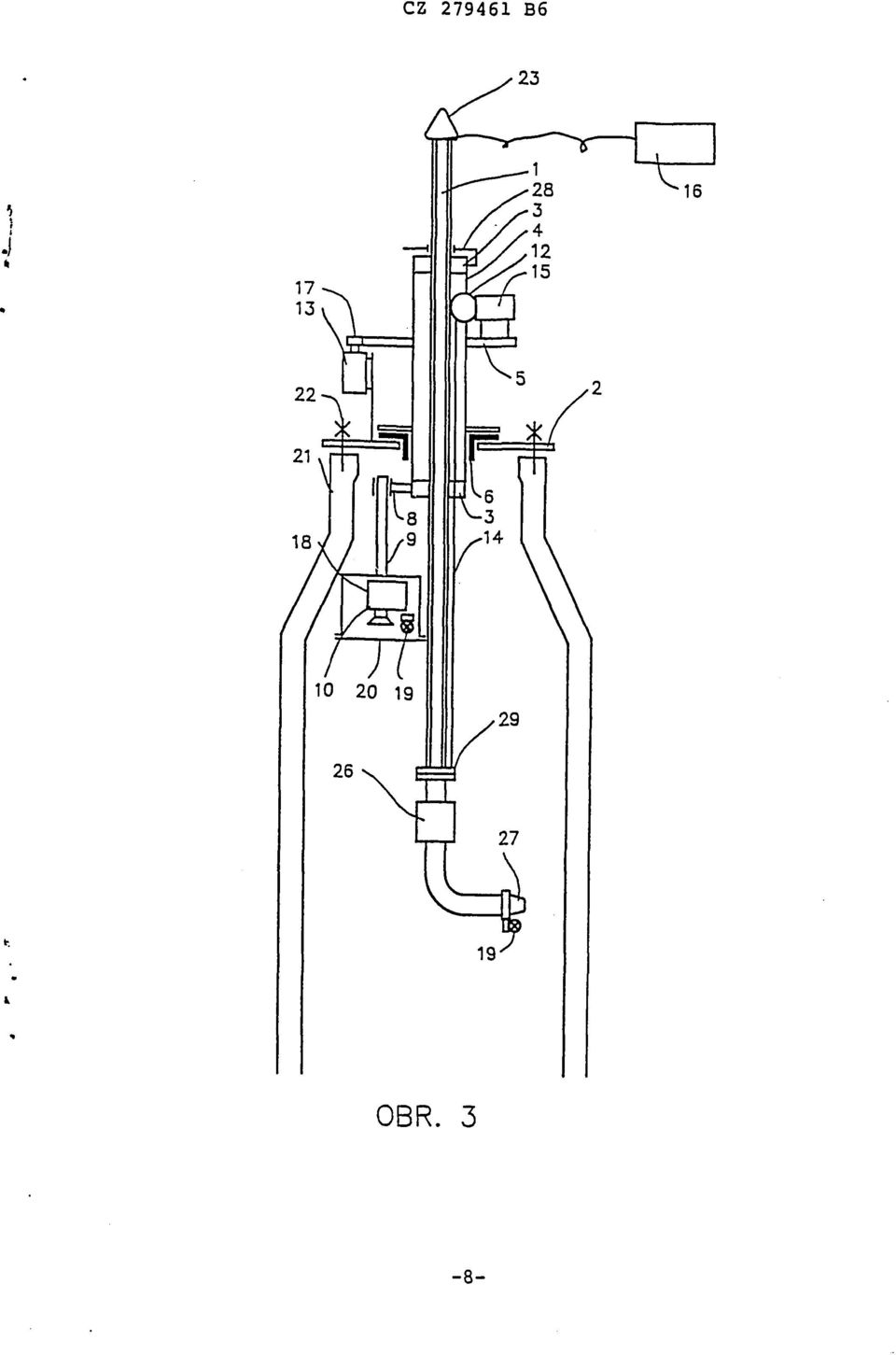
4 a hodnotit integrálně projevy netěsností na hladině kapaliny v primárním kolektoru, v němž je manipulátor vložen. Zařízení videomodulu na závěsu a situování kamery v něm s orientovanou její optickou osou zjednodušuje konstrukci manipulátoru, odstraňuje potřebu dálkově ovladatelných prvků polohy kamery a přitom lze hodnotit projevy netěsností na celé ploše hladiny kapaliny v primárním kolektoru. Vyhodnocením činnosti pohonů lze zcela exaktně lokalizovat netěsnosti. Kompaktnost provedení manipulátoru snižuje na minimum potřebnou dobu pobytu personálu u netěsného parního generátoru a tak minimalizuje nebezpečí ohrožení zdraví obsluhujícího personálu při práci. Podstatnou výhodou směrem k jednoznačnosti identifikace, zpřesnění vyhledávání netěsností a zkrácení přípravných prací je užití pomocného modulu s čerpadlem a směrovou tryskou v jeho výtlaku a rozebíratelné propojení televizních kamer, zdrojů světla, čerpadla a pohonů s ovládacím zařízením, které je z důvodu minimalizace exposice záření a kontaminace personálu výhodné umisťovat v reaktorovém sále. Toto modulové řešení je možné po vytvoření připojovací desky na konci dutého sloupu. Manipulátor dále umožňuje místní vysušování teplosměnných trubek a kolektoru pro další operace na netěsném parním generátoru. Přehled obrázků na výkrese Vynález bude blíže osvětlen pomocí připojeného výkresu, kde na obr. 1 je schéma řešení manipulátoru se závěsným lanem pro svislý pohyb dutého sloupu, na obr. 2 je řešení s alternativním pohonem dutého sloupu, na obr. 3 je schéma provedení manipulátoru s pomocným modulem a na obr. 4 je nakresleno schéma manipulátoru s přídavným modulem pro místní vysušování teplosměnných trubek a kolektoru. Přiklad provedeni vynálezu Dutý sloup 1 opatřený na konci orientovaném pod nosnou deskou 2. připojovací deskou :29, je pouze suvně veden v ložiskách 2/ které jsou vytvořeny v nosné trubce 4., na níž je fixováno ovládací kolo 5_. Na ovládacím kole 5. je upevněn pohon.15. svislého pohybu dutého sloupu 1.. Ovládací kolo 5. je pevně uchycené na nosné trubce 4., otočně vedené v ložiskovém lůžku _, které je vytvořené na nosné desce 2. Na nosné desce 2 je upevněn pohon 1.3. otáčivého pohybu, opatřený hnacím prvkem 12, který ovládá ovládací kolo 5_. Na spodní části nosné trubky 4., která se nachází pod nosnou deskou 2 je upevněn držák 8. pro závěs 9. videomodulu. Pohon 1,5. svislého pohybu dutého sloupu i, je napojen na otočný buben 12. i n a němž je fixováno závěsné lano JL4_, které částečně prochází nosnou trubkou 4. a je na něm zavěšen konec dutého sloupu 1, který se nachází pod nosnou deskou 2. V alternativním provedení je pohon 15 svislého pohybu opatřen podávacím kolem 2±, které zabírá do hřebenu 2JL/ vytvořeném po délce dutého sloupu i. V držáku 8. je suvně upevněn závěs 9. videomodulu, k němuž je vodotěsně připojena komora 3J[ videomodulu. Ta je opatřena průzorem.20. a jsou v ní upevněny zdroj světla 1.9, a televizní kamera JLO. tak, že optická osa kamery OJ) je kolmá na průzor.20. a současně je rovnoběžná s podélnou osou dutého sloupu.1. Alternativně je na konec dutého sloupu 1 orientovaný pod nosnou deskou 2 pomocí připojovací desky 29 vodotěsně napojen pomocný modul, který je opatřen čerpadlem 26. na jehož výtlaku je tryska 21. orientovaná tak, že její osa je

5 kolmá k podélné ose dutého sloupu X- Alternativně je na připojovací desku 2JL vodotěsně upevněna uzavřená komora 1_ s televizní kamerou 10. a zdrojem osvětlení 19. nebo je na připojovací desku 29 vodotěsně upevněna uzavřená komora 1_ opatřená trubkou 3J2 s nástavcem 32 ve směru teplosmennych trubek 25 a pohonem trubky 34 a propojenou pružinou hadicí 21 se zásobníkem horkého vzduchu 30 s ohřevem 31. V pracovní poloze na primárním kolektoru 2JL je nosná deska 2_ manipulátoru upevněna k němu alespoň jedním svorníkem.22.. Televizní kamery 10., zdroje světla 19., čerpadlo.26 a pohon 13. otáčivého pohybu a pohon JL5 svislého pohybu jsou napojeny na ovládací zařízení 1,6., které je umístěno v reaktorovém sále. Na horním konci dutého sloupu i je proveden závěs 2, na spodním konci dutého sloupu 1. je vodotěsně prostřednictvím připojovací desky.29. napojena již známá uzavřená komora 1_, na níž je orientované vytvořen vodotěsně uzavíratelný průzor 11 a v níž jsou umístěny zdroje světla,19. a orientované televizní kamery 10. a dále již také známé akustické zařízení netěsností. Do každého z obou primárních kolektorů parního generátoru typu WER se zavede manipulátor pro vyhledávání netěsností. Po uvolnění fixačního zařízení 28 a po propojení kamer.10., pohonů 13, 15 a zdrojů, světla 3J[, eventuálně i čerpadla 2j5 s ovládacím zařízením.16 se pomocí televizní kamery 1.0 umístěné v uzavřené komoře l_t dále pomocí kamery JLO_ videomodulu a pomocí pohonů 13, 15 provádí vyhledávání netěsností a jejich jednoznačná identifikace a kvalifikace. Pro přípravu parního generátoru před vyhledáním netěsností slouží také čerpadlo J26. s orientovanou tryskou 2J7 v jeho výtlaku. Vodotěsná komora 7. s trubkou 22. s nástavcem 22 je určená pro místní vysušování netěsných teplosmennych trubek 21. a kolektoru J21. před následnými operacemi oprav, například záslepkami, prováděnými po vyhledání netěsností. PATENTOVÉ NÁROKY 1. Manipulátor pro vyhledávání netěsností v kolektorech, v teplosmennych trubkách a v jejich spojích s kolektory u parních generátorů typu WER při odstávce bloku, opatřený dutým sloupem, na jehož jednom konci je vodotěsně napojena uzavřená komora s vodotěsným uzaviratelnym průzorem a s vestavěnou televizní kamerou a světelnými zdroji, v y z n a č u j ící se tím, že dutý sloup (1) opatřený na konci orientovaném pod nosnou deskou (2) připojovací deskou (29) je suvně veden v ložiskách (3) vytvořených v nosné trubce (4), k níž je fixováno ovládací kolo (5), na němž je upevněn pohon (15) svislého pohybu dutého sloupu (1), ovládací kolo (5) je pevné uchycené na nosné trubce (4) otočné vedené v ložiskovém lůžku (6), vytvořeném na nosné desce (2), k níž je upevněn pohon (13) otáčivého pohybu, opatřený hnacím prvkem (17), napojeným na ovládací kolo (5) a současně je v její spodní části orientované pod nosnou deskou (2) upevněn držák (8) pro závěs (9) videomodulu. -4-

6 2. Manipulátor podle nároku 1, v y z n a č u j í c í se tím, že na pohon (15) svislého pohybu je napojen otočný buben (12) se závěsným lanem (14), které částečně prochází nosnou trubkou (4), přičemž na závěsném lanu (14) je zavěšena připojovací deska (29) dutého sloupu (1). 3. Manipulátor podle nároku 1, v y z n a č u j í c í se tím, že pohon (15) svislého pohybu je opatřen podávacím kolem (24), zabírajícím do hřebenu (25) jež je vytvořen po délce dutého sloupu (1). 4. Manipulátor podle nároků 1, 2 a 3, v y z n a č u j í c í s e tím, že v držáku (8) je suvně upevněn závěs (9) videomodulu, k němuž je vodotěsně připevněna komora (18) videomodulu, opatřená průzorem (20), v komoře (18) videomodulu jsou upevněny zdroj světla (19) a televizní kamera (10) tak, že optická osa komory (18) videomodulu je s výhodou kolmá na průzor (20) a rovnoběžná s podélnou osou dutého sloupu (1). 5. Manipulátor podle nároků 1, 2, 3 a 4, v y z n a č u j í c í se tím, že na konci dutého sloupu (1) orientovaném pod nosnou deskou (2) je na připojovací desku (29) vodotěsně napojen pomocný modul, opatřený čerpadlem (26) s tryskou (27) na jeho výtlaku, přičemž osa připojovací desky (29) je kolmá k podélné ose dutého sloupu (1) a zdroje světla (19). 6. Manipulátor podle nároků 1, 2, 3 a 4, v y z n a č u j í c í se tím, že na připojovací desku (29) je vodotěsně upevněna uzavřená komora (7). 7. Manipulátor podle nároků 1, 2, 3, 4 a 6, v y z n a č u j í - cí se tím, že na připojovací desku (29) je upevněn přídavný modul, tvořený vodotěsnou komorou (7), opatřenou trubkou (32) s nástavcem (33) a pohonem trubky (34), která je propojena pružnou hadicí (31) se zásobníkem horkého tlakového vzduchu (30) opatřeného ohřevem (36). 8. Manipulátor podlé nároků 1, 2, 3, 4, 5, 6a7, vyznačující se tím, že televizní kamery (10), zdroje světla (19), čerpadlo (26), pohon (13) otáčivého pohybu a pohon (15) svislého pohybu jsou rozebíratelně propojeny s ovládacím zařízením (16) s výhodou situovaným v radikálně bezpečné vzdálenosti od primárního kolektoru (21), například v reaktorovém sále. 4 výkresy -5-
 je suvně upevněn závěs (9) videomodulu, k němuž je vodotěsně připevněna komora (18) videomodulu, opatřená průzorem")
7 OBR. 1-6-
8 OBR. 2-7-
9 OBR. 3-8-
10 4 / OBR. 4 Konec dokumentu -9-
