1. Pomocí modulového systému Dominoputer sestavte základní obvod PID regulátoru a seznamte se s funkcí jednotlivých jeho částí.
|
|
|
- Simona Burešová
- před 9 lety
- Počet zobrazení:
Transkript
1 MĚŘENÍ NA PID EGULÁTOU Pomocí modulového systému Dominoputer sestavte základní obvod PID regulátoru a seznamte se s funkcí jednotlivých jeho částí.. Určete přenosovou funkci a přechodovou charakteristiku: a) proporcionálního členu (O1) b) integračního členu (O) c) derivačního členu (O). Určete přenosovou funkci sestaveného PID regulátoru a změřte jeho přechodovou charakteristiku. 16 MOŘKOVSKÝ TOMÁŠ 1 M
 proporcionálního členu (O1) b) integračního členu")
2 SCHÉMA Obr. 1 apojení měřeného obvodu - PID regulátor Obr. Blokové schéma regulačního obvodu PC U CC A/D převodník PC INTEFACE D/A převodník PID regulátor SČÍTACÍ ČLEN MOŘKOVSKÝ TOMÁŠ M4 list č. 1

3 Obr. apojení stavebnice Domino POUŽITÉ PŘÍSTOJE ON. PŘÍSTOJ TYP EVID. Č. PONÁMKA PC osobní počítač P droj napětí BK Ucc V A/D A/D převodník Dominoputer D/A D/A převodník Dominoputer Interface převod dat DP/PC Dominoputer O1-O4 operační zesilovače Dominoputer 1-10 rezistory viz TAB1 --- Dominoputer C 1 kondenzátor μf --- Dominoputer C kondenzátor 470 nf --- Dominoputer POSTUP MĚŘENÍ 1. Návrh jednotlivých částí systému, seznámení se s novými prvky Dominoputeru a jeho funkcemi a propojení.. apojení systému Dominoputer dle OB.1, OB., OB. a nastavení komunikačního programu (základní zapojení dle OB., analog. vstup, analog. výstup použití jako generátor skokového impulsu a jako osciloskop zaznamenávající časovou odezvu obvodu). Výpočet počtu úrovní pro námi zvolenou velikost skokového impulsu 1V (viz VÝPOČTY).. Volba rozsahů A/D a D/A převodníků v závislosti na jejich použití: výstupní D/A převodník nastavíme na +V (switch 0110) skokový impuls bude mít MOŘKOVSKÝ TOMÁŠ M4 list č.

4 pouze kladné napětí, A/D převodník nastavíme na ±V (switch 0101). Propojení CLK0 a CLK1 na desce PC Interface. 4. Postupné sestavování jednotlivých členů regulátoru (proporcionální s O1, integrační s O, derivační s O) a obvodu analogové negace s O4. Výsledný signál negujeme pomocí zapojení O se zápornou zpětnou vazbou, protože jednotlivé články PID regulátoru jsou zapojeny s O také se zápornou zpětnou vazbou.. měření jednotlivých článků P, I, D a celku PID regulátoru. akreslení všech průběhů viz GAF 1 (červeně skokový impuls, modře změřené průběhy). 6. Určení přechodových funkcí jednotlivých členů. 7. hodnocení výsledků a poznatků z celého měření. TABULKY TAB 1 Hodnoty rezistorů použitých při měření Ozn [kω] * TAB Výsledné parametry článků parametr P I D F(p) p p K p p -1 Au 4 PŘÍKLAD VÝPOČTU a) rezistoru 1 v proporcionálním členu ( 100 kω, A U volíme 4) 1 A U 1 AU kω MOŘKOVSKÝ TOMÁŠ M4 list č.
. 6. Určení přechodových funkcí jednotlivých členů. 7.")
5 b) nastavení úrovní pro výstup skokového impulsu (volíme 1V) úrovní... V V V n úrovní...1v bin dec 1 n 1 1 dec bin c) přenosová funkce a zesílení proporcionálního členu ( kω, 100 kω) výst F P ( P) K P AU K P A U 4 [ ] vst d) přenosová funkce integračního členu ( 100 kω, 4 00 kω, C 1 μf) F ( P) F I K 4 p C p C 4 C výst 1 I vst p I K I K I p ( P) 0.4 p 6 p FI p p p 4 C p p 6 p zesílení integračního členu: A U [ ] doba nabíjení kondenzátoru C 1 : 6 T C s 4 1 Pozn: při měření byl rezistor 4 byl rozpojen a tedy 4 Ω MOŘKOVSKÝ TOMÁŠ M4 list č. 4

6 e) přenosová funkce derivačního členu ( 0 kω, kω, C 470 nf) F D F D K D K D ( P) výst vst p C p 6 C K p C + 1 p ( P) p p FD p p 6 C p C C p p C p p zesílení derivačního členu: A U [ ] doba nabíjení kondenzátoru C : T n C ms 6 D p doba vybíjení kondenzátoru C : T v C ms GAFY GAF 1 Přechodové charakteristiky článků PID regulátoru.. viz list 7 MOŘKOVSKÝ TOMÁŠ M4 list č.
![047 p p 0 10 + 1 zesílení derivačního členu: A U 6 100 10 0 10 [ ] doba nabíjení kondenzátoru C : T n C 100 10 47 ms](/docs-images/50/17186990/images/page_6.jpg "6 D p doba vybíjení kondenzátoru C : T v C 0 10. ms GAFY GAF 1 Přechodové charakteristiky článků PID regulátoru.")
7 MOŘKOVSKÝ TOMÁŠ M4 list č. 6
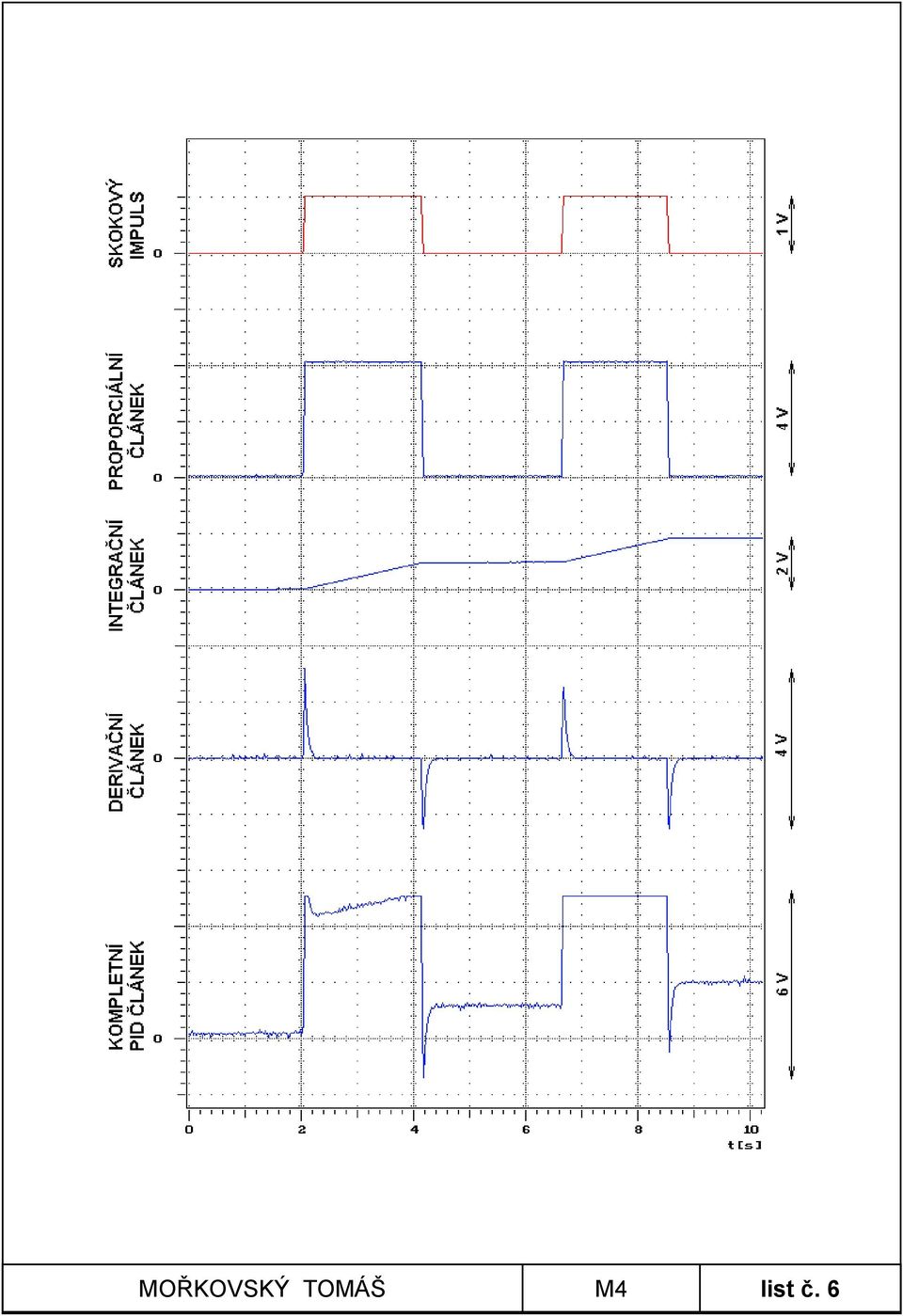
8 ÁVĚ Chyby měření V měření se mohli objevit nepřesnosti, protože jsme použili 8-bitové A/D a D/A převodníky odhadovaná chyba do %, další nedostatky a zkreslení se projevily následkem zobrazení charakteristik na monitoru v nedostatečném rozlišení nemůžeme přesně určit chybu, ale odhadl bych ji do 4 %. hodnocení Jednotlivé články se prakticky chovaly dle našich teoretických předpokladů. Vyzkoušeli jsme mnoho různých hodnot součástek v jednotlivých členech PID regulátoru a ověřili tak jejich vliv na charakteristiku. de jsme se bohužel dopustili drobného zmatku, a tak vypočtené hodnoty v některých případech neodpovídají charakteristice v GAFu 1. Některé naše poznatky: P: - odezva na jednotkový skok je přímka (konstantní) - změna velikosti 1 má vliv na zesílení I: - odezva na jednotkový skok je přímka (rostoucí) - změnou velikosti má vliv na zesílení signálu - změnou velikosti C 1 ovlivňujeme délku integrace signálu D: - odezva na jednotkový skok Diracův impuls - změna součástek, 6, C má vliv na délku náběžné a sestupné hrany impulsu ( a C náběh, 6 a C sestup) V GAFu 1 si u charakteristiky celého PID regulátoru všimneme faktu, že při druhém skokovém impulsu, je již průběh zkreslen integračním článkem, protože zde zůstal nabit kondenzátor C 1. PID regulátorem můžeme regulovat statickou soustavu. a vyššího řádu, astatickou soustavu a soustavu s dopravním zpožděním. Derivační vazba přispívá ke stabilitě. Využití v praxi je např. řízení teploty ve vysokých pecích, vytápění v bytech, atd MOŘKOVSKÝ TOMÁŠ M4 list č. 7
