Zpracoval: Ing Vladimír Michna. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
|
|
|
- Petra Horáčková
- před 9 lety
- Počet zobrazení:
Transkript
1 Snímače č polohy, dráhy a jejich derivací - 2 Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR.

2 In-TECH 2, označuje společný projekt Technické univerzity v Liberci a jejích partnerů ů - Škoda Auto a.s. a Denso Manufacturing Czech s.r.o. Cílem projektu, který je v rámci Operačního programu Vzdělávání pro konkurenceschopnost (OP VK) financován prostřednictvím MŠMT z Evropského sociálního fondu (ESF) a ze státního rozpočtu ČR, je inovace studijního programu ve smyslu progresivních metod řízení inovačního procesu se zaměřením na rozvoj tvůrčího potenciálu studentů. Tento projekt je nutné realizovat zejména proto, že na trhu dochází ke zrychlování inovačního cyklu a zkvalitnění jeho výstupů. ČR nemůže na tyto změny reagovat bez osvojení nejnovějších inženýrských metod v oblasti inovativního a kreativního konstrukčního řešení strojírenských výrobků. Majoritní cílovou skupinou jsou studenti oborů Inovační inženýrství a Konstrukce strojů a zařízení. Cíle budou dosaženy inovací VŠ přednášek a seminářů, vytvořením nových učebních pomůcek a realizací studentských projektů podporovaných experty z partnerských průmyslových podniků. Délka projektu:

3 Snímače rychlosti: lineární (často se převádí na rotační měření): indukční -elektromagnetické ti ké (s pohyblivým magnetem) indukční - elektrodynamické (s pohyblivou cívkou, vhodné pro měření rychlosti kmitů pozor, ne frekvence) laserové ultrazvukové přírůstkové (induktosyn v režimu měření rychlosti frekvence výstupních impulzů) rotační: tachodynama (tachoalternátory) stroboskopické přírůstkové (inkrementální snímač v režimu měření rychlosti frekvence výstupních ýt íhimpulzů) lů)
 stroboskopické přírůstkové (inkrementální snímač v režimu měření rychlosti frekvence")
4 Indukční snímače rychlosti (aktivní, NE indukčnostní - pasivní), pracují na principu Faradayova indukčního zákona: u = N dφφ dt u indukované napětí ve vodičích cívky s N závity (okamžitá hodnota) φ - magnetický tok spjatý s cívkou (v čase proměnný) t čas Podle způsobu realizace časové změny spjatého magnetického toku dělíme indukční snímače na: elektromagnetické působením měřené (neelektrické) veličiny se mění velikost magnetického toku φ v pevné cívce s N závity a měronosnou veličinou je transformační indukované napětí lze použít pro měření časově proměnných veličin elektrodynamické -působením měřené (neelektrické) veličiny se mění počet závitů N spjatých s konstantním magnetickým tokem a měronosnou veličinou je pohybové indukované napětí lze použít pro měření časově proměnných veličin
 veličiny se mění počet závitů N spjatých s konstantním magnetickým tokem a měronosnou veličinou je pohybové indukované napětí lze použít pro měření časově proměnných")
5 Elektromagnetické snímače rychlosti: Principiální uspořádání:

6 okamžitá hodnota indukovaného napětí Snímače polohy, dráhy a jejich derivací přičemž u = N dφ dt φ = R RM FM RM d x = ± μ 0* S μ 0* S a z toho φ - magnetický tok permanentního magnetu F M magnetomotorické napětí permanentního magnetu R M - magnetický odpor vzduchové mezery (magnet. odpor feromagnetika zanedbán) u = N. FM. μ 0. S. d dt 1 d ± x S - průřez vzduchové mezery (pólových nástavců) μ 0 - permeabilita (magnetický odpor) vzduchu (1, H/m)
 μ 0 - permeabilita (magnetický odpor) vzduchu (1,256.")
7 a pro x << d je: N. FM. μ 0. S u = * 2 d dx dt tedy EFEKTIVNÍ hodnota NAPĚTÍ snímače je úměrná střední RYCHLOSTI pohybu Bude-li se měřený objekt HARMONICKY pohybovat kolem klidové polohy s konstantním úhlovým kmitočtem ω, t.j. X = Xm sin ω t a magnetický obvod bude konstruován tak, aby se magnetický tok φ měnil také harmonicky, t.j.: φ = φm sinωt

8 pak u =... = N. ω. φm. cosωt aproω ω = konst je u konst. φm, Snímače polohy, dráhy a jejich derivací tedy efektivní hodnota indukovaného napětí je úměrná AMPLITUDĚ mechanických kmitů X m Příklad aplikace pro přímočarý a rotační pohyb:

9 Elektrodynamické snímače rychlosti: Principiální uspořádání: Snímače polohy, dráhy a jejich derivací B indukce magnetického pole (stacionární) l aktivní délka vodiče ( v magnet. poli) v rychlost pohybu vodiče (dynamo - platí pravidlo PRAVÉ ruky) (motor platí pravidlo LEVÉ ruky) POZNÁMKA: vektory všech tří veličin (B, l, v) jsou na sebe vzájemně ě KOLMÉ
 v rychlost pohybu vodiče (dynamo - platí pravidlo PRAVÉ ruky) (motor platí")
10 indukované STEJNOSMĚRNÉ Ě napětí (v 1 vodiči): u = B. l. v Příklad aplikace pro přímočarý pohyb a schematické znázornění (absolutní senzor kmitavého pohybu a jeho model): Mechanická kmitavá soustava tvořená: m - hmotnost cívky s kostrou (seismický prvek) M - pouzdro senzoru, spojené s měřeným objektem b - k - u - tlumení úměrné rychlosti pohybu (viskozní tlumení) tuhost pružiny indukované napětí

11 Mechanická kmitavá soustava tvořená: m - hmotnost cívky s kostrou (seismický prvek) M - pouzdro senzoru, spojené s měřeným objektem b - tlumení úměrné rychlosti pohybu (viskozní tlumení) k - tuhost pružiny u - indukované napětí Pro rovnováhu sil k měrnému (virtuálnímu) bodu A platí (pohybová rovnice): m 2 d z 2 dt dx + b + kx dt = 0 (součet setrvačné, tlumící a direktivní síly je nulový) dále platí: z ( t ) = x ( t ) + y ( t )
 dále platí: z ( t ) = x ( t ) +")
12 a dosazením: 2 d x m 2 dt dx + b dt + kx Snímače polohy, dráhy a jejich derivací 2 d y = m 2 dt Pro harmonický pohyb měřeného objektu t.j.: jsou významné dva případy: 1) ω << ω 0 b < b kr X ( jω) 2 d y 2 dt senzor v režimu ZRYCHLENÍ (akcelerometry) k ω = m 0 ω bkr b X y( t) = Y ( = 2mω 0 ( jω) jω) e jωt rezonanční úhlová frekvence úhlová frekvence měřeného objektu kritické tlumení viskozní tlumení amplituda harmonického pohybu x ( t ) = X ( j ω ) e j ( ωt ϕ )
 ω << ω 0 b < b kr X ( jω) 2 d y 2 dt senzor v režimu ZRYCHLENÍ (akcelerometry) k ω")
13 ω >> ω 2) 0 b < b kr X ( jω) Y ( jω) 1 ; ϕ 180 o x( t) = y( t) a z( t) = 0 senzor v režimu měření amplitudy, t.j. DRÁHY pohybu (vztažný bod A leží uvnitř senzoru)

14 Aplikace pro otáčivý pohyb: stejnosměrné (tachodynama) nebo střídavé (tachoalternátory) Hlavní požadavky na: linearitu minimální zvlnění indukovaného napětí U d ϕ / 0 = kt ω = kt ( k T. n ) dt T = UT 0 / ktk k T výstupní (indukované) napětí naprázdno, konstrukční konstanty Lze použít jako snímače: úhlové rychlosti (ω) nebo otáček (n) derivace úhlového natočení hřídele (φ)
 nebo otáček (n) derivace úhlového natočení")
15 Příklad - elektronicky komutované tachodynamo: Konstrukčně ě se jedná o synchronní 6-pólový stroj, jehož rotor s permanentními magnety je uspořádán tak, aby výsledná magnetická indukce ve vzduchové mezeře měla téměř obdélníkový průběh. V důsledku toho se indukují ve statorovém t trojfázovém vinutí lichoběžníková napětí, časově vůči sobě posunutá a překrývající se. Polohové signály G U, G V, G W, které jsou generovány pomocí Hallových sond, řídí elektronický usměrňovač tak, že z kladných a záporných lichoběžníkových napětí U U, U V, U W vybírají konstantní úseky a vytvářejí výstupní analogový stejnosměrný signál tachodynama. Jedné otáčce rotoru odpovídá 3 x 6 =18 částí, výstupní signál má minimální zvlnění a jeho velikost je úměrná rychlosti U T 0 = ktω

16 Princip činnosti elektronicky komutovaného tachodynama

17 Pohled na tachodynamo

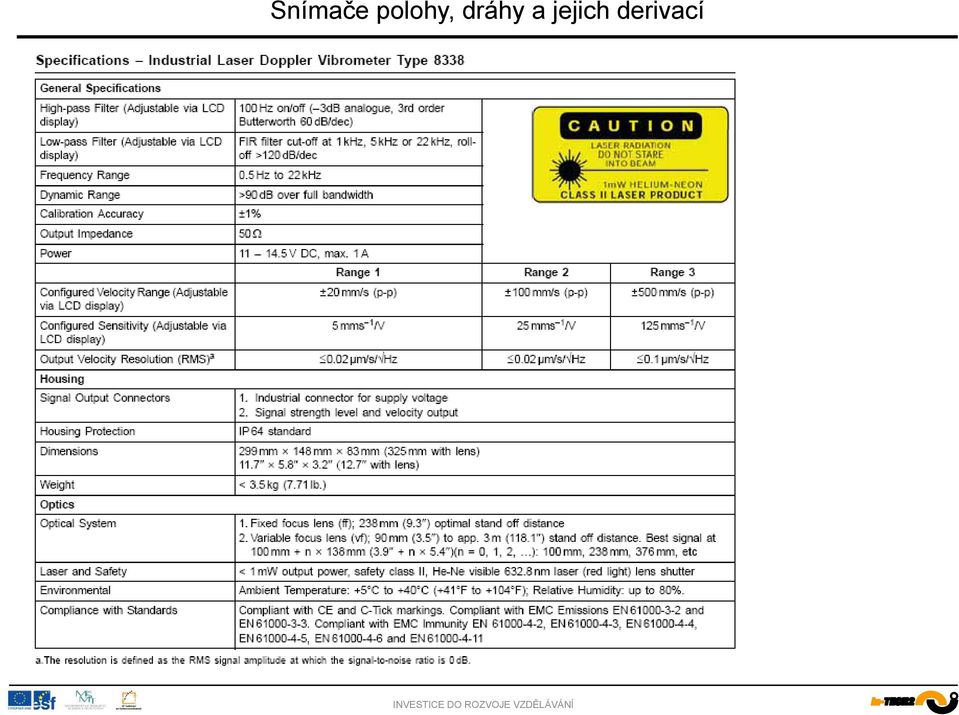
18 Laserové snímače rychlosti (kmitání) Snímače polohy, dráhy a jejich derivací Jako příklad je uveden laserový Dopplerův vibrometr Brüel & Kjær Slouží k bezkontaktnímu a velice rychlému měření vibrací. Výstupem laserového vibrometru je signál rychlostí kmitání. Pracuje na vzdálenosti až 3 metrů od snímaného objektu. Poznámka: Dopplerův jev nastává tehdy, když se k sobě nebo od sebe pohybuje přijímač a vysílač kmitání. Při přibližování vysílače nebo přijímače se zkracuje vlnová délka. (přesněji: zkrátí se o vzdálenost o kterou se vysílač přemístí za jednu periodu) Přijímaná frekvence je tedy závislá na rychlosti vysílače vzhledem k přijímači a na rychlosti šíření zvuku prostředím (přesněji: závisí na jejich poměru).
 Přijímaná frekvence je tedy závislá na rychlosti vysílače vzhledem k přijímači a na rychlosti šíření")
19
20 Snímače zrychlení: Princip funkce snímačů zrychlení vychází ze druhého Newtonova zákona (působení síly F na setrvačnou hmotu m): F=m* a

21 Pro soustavu podle obrázku platí: m 2 d x 2 dt + b dx dt + kx = 2 d y 2 dt Pro harmonický pohyb měřeného objektu, t.j. y j ω t ( t ) = Y ( jω ) e Jsou významné dva případy: p ω 0 k = M rezonanční úhlová frekvence 1. ω << ω 0, b < b kr X 2 d y dt ( jω ) 2 snímač v režimu ZRYCHLENÍ ω úhl. frekvence měřeného objektu b kr = 2mω 0 kritické ké tlumení b viskozní tlumení snímače (mech.) X ( jω) amplituda harmonického pohybu x j ( ωt ϕ ) ( t ) = X ( j ω ) e
22 2. ω >> ω 0, b < b kr X Y ( jω ) ( jω ) 1, ϕ = 180 o x () t = y() t a z( t) = 0 snímač v režimu měření amplitudy pohybu, t.j. DRÁHY (vztažný (virtuální) bod leží uvnitř snímače)
23 Používané snímače: piezoelektrické indukčnostní (elektrodynamické) kapacitní (méně často)
24 Piezoelektrické akcelerometry - aktivní: Využívá schopnosti piezoelektrických krystalů vytvářet náboj vdůsledku mechanického namáhání. Pro větší citlivost se používá dvojice piezoelektrických elementů. Vnitřní tlumení piezoelektrického materiálu je velmi malé, lze měřit vibrace až do řádu 3*10 4 Hz
25 Existují tři základní druhy křemíkových akcelerometrů: - piezoelektrické, - piezorezistivní - kapacitní Piezoelektrické nelze využít pro statické měření, protože nejsou citlivé na statickou akceleraci (na př. gravitace). U piezorezistivních akceleroemtrů se pohybem závaží vytváří tlak na piezorezistor, který mění svůj odpor. Lze s nimi měřit i neměnné zrychlení. Kapacitní senzory jsou založeny na kapacitě tvořené vzájemnou polohou desek kondenzátoru při působení akcelerace. Existují dvě varianty: - akcelerometry se zpětnou vazbou a - bez zpětné vazby.
26 Křemíkový akcelerometr používá křemíkovou pružinu a křemíkové závaží. Vuspořádání bez zpětné vazby yje akcelerace měřena jako posun závaží. Klasické nedostatky jsou: nelinearita, vliv akcelerace kolmé na osu citlivosti, hysterezní charakter, větší šum. Akcelerometry se zpětnou vazbou používají vnitřní sílu, která vrací snímací elementy do rovnovážné polohy. Ta je rovna velikosti vnější působící síly, je měřena a je úměrná měřenému zrychlení. Typicky se používá síla magnetická, piezoelektrická nebo elektrostatická. Zmenší se na minimum nelineární charakter měřené křivky, zvětší se dynamický rozsah a šířka frekvenčního pásma. Hysterezní efekt je minimalizován a je dosahováno vyšší přesnosti. Pro větší přesnost ř se používá uspořádání se zpětnou vazbou.
27 Indukčnostní (elektrodynamické) akcelerometry - aktivní: Pohybem systému kmitá cívka v poli permanentního magnetu, v cívce se při pohybu indukuje napětí, které je přímo úměrné rychlosti. Vlastní kmitočet elektrodynamických senzorů se pohybuje v rozmezí 5 až 10Hz. Pokud přidáme tlumení (tlumicí závit, uložený pod cívkou) lze dosáhnout frekvence od 1Hz do 3000Hz.
28
29 Kapacitní akcelerometry: Pro kapacitu deskového kondenzátoru platí: kapacitu lze měnit: změnou velikosti (společných) ploch (S) změnou vzdálenosti desek (d) změnou dielektrické konstanty (permitivity) dielektrika mezi deskami (ε) S C = ε 0ε d C kapacita kondenzátoru (F) ε 0 permitivita vakua (= 8, F/m) ε - relativní permitivita dielektrika (-) S - společná plocha desek (m 2 ) d - vzdálenost desek (m)
30 Příklad řešení kapacitního akcelerometru MEMS: (MEMS - Micro Electro Mechanical System) anchors spojení s kmitajícím í objektem main beam seismická hmotnost cell diferenční kapacitní snímač
31 Příklad použití v autoprůmyslu: k regulaci klepání u spalovacích motorů, ů pro vybavení airbagu, k vybavení předepínače bezpečnostních pásů, jako detekce převrácení (vypnutí zapalování, uzavření přívodu paliva), ke snímání zrychlení v zatáčkách, v protiblokovacím systému (ABS) při elektronickém řízení stability (ESP) k regulaci podvozku Zrychlení se často udává jako násobek gravitačního zrychlení g (9,81 m/s 2 )
32 Piezoelectric accelerometer Model 23 (Endevco)
33
34
Základy tvorby výpočtového modelu
 Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Kapacitní senzory. ε r2. Změna kapacity důsledkem změny X. b) c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod
 c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod") Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací.
 8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací. přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací. přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
Senzory mechanického kmitavého pohybu (vibrací)
") Senzory mechanického kmitavého pohybu (vibrací) - relativní senzor polohy + vnější vztažný bod často bezkontaktní - absolutní uvnitř vztažný bod + relativní senzor polohy elektrodynamický senzor vibrací
Senzory mechanického kmitavého pohybu (vibrací) - relativní senzor polohy + vnější vztažný bod často bezkontaktní - absolutní uvnitř vztažný bod + relativní senzor polohy elektrodynamický senzor vibrací
Teorie bezkontaktního měření rozměrů
 Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Analogově číslicové převodníky
 Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Obr. 8.1 Elektrodynamický senzor rychlosti
 1.1 SENZORY OTÁČEK, RYCHLOSTI A ZRYCHLENÍ - Rychlost posuvného nebo rotačního pohybu lze určit derivací výstupního signálu senzorů polohy. Přímé měření rychlosti posuvného pohybu je možné senzory s pohyblivou
1.1 SENZORY OTÁČEK, RYCHLOSTI A ZRYCHLENÍ - Rychlost posuvného nebo rotačního pohybu lze určit derivací výstupního signálu senzorů polohy. Přímé měření rychlosti posuvného pohybu je možné senzory s pohyblivou
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Tématické okruhy teoretických zkoušek Part 66 1 Modul 3 Základy elektrotechniky
 Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Technická diagnostika Měření a diagnostika vibrací Učební text Ivan Jaksch Liberec 2010 Materiál vznikl v rámci projektu
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Technická diagnostika Měření a diagnostika vibrací Učební text Ivan Jaksch Liberec 2010 Materiál vznikl v rámci projektu
Elektrické výkonové členy Synchronní stroje
 Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
X14 AEE + EVA Mindl. Odstředivý regulátor předstihu zážehu
 Odstředivý regulátor předstihu zážehu Legenda: 7-základová deska odstředivého regulátoru, 8-čep otočného závaží, 9-otočné závaží, 10- pružina, 11- kulisa s vačkou, Rozdělovač zapalovacích impulsů s odstředivým
Odstředivý regulátor předstihu zážehu Legenda: 7-základová deska odstředivého regulátoru, 8-čep otočného závaží, 9-otočné závaží, 10- pružina, 11- kulisa s vačkou, Rozdělovač zapalovacích impulsů s odstředivým
Měření neelektrických veličin. Fakulta strojního inženýrství VUT v Brně Ústav konstruování
 Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
STŘÍDAVÝ PROUD POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D17_Z_OPAK_E_Stridavy_proud_T Člověk a příroda Fyzika Střídavý proud Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D17_Z_OPAK_E_Stridavy_proud_T Člověk a příroda Fyzika Střídavý proud Opakování
Pevnostní analýza plastového držáku
 Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
Laboratorní úloha č. 2 Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon. Max Šauer
 Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN
 METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN Milan Prášil Český metrologický institut Laboratoře primární metrologie E-mail: mprasil@cmi.cz Tato prezentace je spolufinancována Evropským sociálním fondem
METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN Milan Prášil Český metrologický institut Laboratoře primární metrologie E-mail: mprasil@cmi.cz Tato prezentace je spolufinancována Evropským sociálním fondem
19. Elektromagnetická indukce
 19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Laboratorní úloha č. 5 Faradayovy zákony, tíhové zrychlení
 Laboratorní úloha č. 5 Faradayovy zákony, tíhové zrychlení Úkoly měření: 1. Měření na digitálním osciloskopu a přenosném dataloggeru LabQuest 2. 2. Ověřte Faradayovy zákony pomocí pádu magnetu skrz trubici
Laboratorní úloha č. 5 Faradayovy zákony, tíhové zrychlení Úkoly měření: 1. Měření na digitálním osciloskopu a přenosném dataloggeru LabQuest 2. 2. Ověřte Faradayovy zákony pomocí pádu magnetu skrz trubici
FYZIKA II. Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování)
") FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
MECHANICKÉ KMITÁNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Název: Téma: Autor: Číslo: Prosinec 2013. Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje. Pracovní list - příklad vytvořil: Ing.
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Vizualizace dějů uvnitř spalovacího motoru
 Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014
 Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
ELEKTROMAGNETICKÉ KMITÁNÍ A VLNĚNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D18_Z_OPAK_E_Elektromagneticke_kmitani_a_ vlneni_t Člověk a příroda Fyzika Elektromagnetické
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D18_Z_OPAK_E_Elektromagneticke_kmitani_a_ vlneni_t Člověk a příroda Fyzika Elektromagnetické
Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků,
 5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
Zapnutí a vypnutí proudu spínačem S.
 ELEKTROMAGNETICKÁ INDUKCE Dva Faradayovy pokusy odpovídají na otázku zda může vzniknout elektrický proud vlivem magnetického pole Pohyb tyčového magnetu k (od) vodivé smyčce s měřidlem, nebo smyčkou k
ELEKTROMAGNETICKÁ INDUKCE Dva Faradayovy pokusy odpovídají na otázku zda může vzniknout elektrický proud vlivem magnetického pole Pohyb tyčového magnetu k (od) vodivé smyčce s měřidlem, nebo smyčkou k
Hlavní body - elektromagnetismus
 Elektromagnetismus Hlavní body - elektromagnetismus Lorenzova síla, hmotový spektrograf, Hallův jev Magnetická síla na proudovodič Mechanický moment na proudovou smyčku Faradayův zákon elektromagnetické
Elektromagnetismus Hlavní body - elektromagnetismus Lorenzova síla, hmotový spektrograf, Hallův jev Magnetická síla na proudovodič Mechanický moment na proudovou smyčku Faradayův zákon elektromagnetické
20ZEKT: přednáška č. 10. Elektrické zdroje a stroje: výpočetní příklady
 20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
Elektromechanické měřicí přístroje
 Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Automatizační technika Měření č. 6- Analogové snímače
 Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Účinky měničů na elektrickou síť
 Účinky měničů na elektrickou síť Výkonová elektronika - přednášky Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Definice pojmů podle normy ČSN
Účinky měničů na elektrickou síť Výkonová elektronika - přednášky Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Definice pojmů podle normy ČSN
Fyzika 6. ročník. přesahy, vazby, mezipředmětové vztahy průřezová témata. témata / učivo. očekávané výstupy RVP. očekávané výstupy ŠVP
 očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
Značky systémů analogových měřicích přístrojů
 Anotace Seznámení se značkami měřicích systémů u analogových měřicích přístrojů. Materiál je možné použít pro samostatnou práci a je možné jej poskytnout nepřítomným žákům. Autor Jazyk Očekávaný výstup
Anotace Seznámení se značkami měřicích systémů u analogových měřicích přístrojů. Materiál je možné použít pro samostatnou práci a je možné jej poskytnout nepřítomným žákům. Autor Jazyk Očekávaný výstup
Zpracoval: Ing Vladimír Michna. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
 Frekvenční č analýza vetknutého nosníku pomocí analyzátoru PULSE Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Frekvenční č analýza vetknutého nosníku pomocí analyzátoru PULSE Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Elektromagnetický oscilátor
 Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
Základy elektrotechniky 2 (21ZEL2)
") Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
Elektromagnetismus 163
 Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Výukové texty pro předmět Měřící technika (KKS/MT) na téma
 na téma") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
C L ~ 5. ZDROJE A ŠÍŘENÍ HARMONICKÝCH. 5.1 Vznik neharmonického napětí. Vznik harmonického signálu Oscilátor příklad jednoduchého LC obvodu:
 5. ZDROJE A ŠÍŘENÍ HARMONICKÝCH 5.1 Vznik neharmonického napětí Vznik harmonického signálu Oscilátor příklad jednoduchého LC obvodu: C L ~ Přístrojová technika: generátory Příčiny neharmonického napětí
5. ZDROJE A ŠÍŘENÍ HARMONICKÝCH 5.1 Vznik neharmonického napětí Vznik harmonického signálu Oscilátor příklad jednoduchého LC obvodu: C L ~ Přístrojová technika: generátory Příčiny neharmonického napětí
Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole
 Akustické přijímače Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole jeho součástí je elektromechanický měnič Při přeměně kmitů plynu = mikrofon Při přeměně
Akustické přijímače Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole jeho součástí je elektromechanický měnič Při přeměně kmitů plynu = mikrofon Při přeměně
Generátorové senzory. Termoelektrický článek Piezoelektrické senzory Indukční senzory
 Generátorové senzory Termoelektrický článek Piezoelektrické senzory Indukční senzory Obecné vlastnosti termoelektrických článků využívá Seebeckova efektu vodivé spojení dvou různých vodivých materiálů
Generátorové senzory Termoelektrický článek Piezoelektrické senzory Indukční senzory Obecné vlastnosti termoelektrických článků využívá Seebeckova efektu vodivé spojení dvou různých vodivých materiálů
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
9.7. Vybrané aplikace
 Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Příklady kmitavých pohybů. Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
ELEKTROMAGNETICKÉ POLE
 ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Mgr. Jan Ptáčník. Elektrodynamika. Fyzika - kvarta! Gymnázium J. V. Jirsíka
 Mgr. Jan Ptáčník Elektrodynamika Fyzika - kvarta! Gymnázium J. V. Jirsíka Vodič v magnetickém poli Vodič s proudem - M-pole! Vložení vodiče s proudem do vnějšího M-pole = interakce pole vnějšího a pole
Mgr. Jan Ptáčník Elektrodynamika Fyzika - kvarta! Gymnázium J. V. Jirsíka Vodič v magnetickém poli Vodič s proudem - M-pole! Vložení vodiče s proudem do vnějšího M-pole = interakce pole vnějšího a pole
Stacionární magnetické pole. Kolem trvalého magnetu existuje magnetické pole.
 Magnetické pole Stacionární magnetické pole Kolem trvalého magnetu existuje magnetické pole. Stacionární magnetické pole Pilinový obrazec magnetického pole tyčového magnetu Stacionární magnetické pole
Magnetické pole Stacionární magnetické pole Kolem trvalého magnetu existuje magnetické pole. Stacionární magnetické pole Pilinový obrazec magnetického pole tyčového magnetu Stacionární magnetické pole
 !"#$% &'(')!"#$%* je funkční prvek tvořící vstupní blok měřícího řetězce, který je v přímém styku s měřeným prostředím. Citlivá část senzoru se někdy označuje jako čidlo. Senzor snímá sledovanou fyzikální
!"#$% &'(')!"#$%* je funkční prvek tvořící vstupní blok měřícího řetězce, který je v přímém styku s měřeným prostředím. Citlivá část senzoru se někdy označuje jako čidlo. Senzor snímá sledovanou fyzikální
NESTACIONÁRNÍ MAGNETICKÉ POLE. Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník
 NESTACIONÁRNÍ MAGNETICKÉ POLE Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník Nestacionární magnetické pole Vektor magnetické indukce v čase mění směr nebo velikost. a. nepohybující
NESTACIONÁRNÍ MAGNETICKÉ POLE Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník Nestacionární magnetické pole Vektor magnetické indukce v čase mění směr nebo velikost. a. nepohybující
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Snímače a akční členy zážehových motorů
 Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka
 Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky
 vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky") Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
1 SENZORY SÍLY, TLAKU A HMOTNOSTI
 1 SENZORY SÍLY, TLAKU A HMOTNOSTI Senzory používající ve většině případů princip převodu síly, tlaku a tíhy na deformaci. Využívají fyzikálních účinků síly. Časově proměnná síla vyvolá zrychlení a hmotnosti
1 SENZORY SÍLY, TLAKU A HMOTNOSTI Senzory používající ve většině případů princip převodu síly, tlaku a tíhy na deformaci. Využívají fyzikálních účinků síly. Časově proměnná síla vyvolá zrychlení a hmotnosti
Obvodové prvky a jejich
 Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností
 na téma Podklady k principu měření vibrací a tlumicích vlastností") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Střídavý proud, trojfázový proud, transformátory
 Variace 1 Střídavý proud, trojfázový proud, transformátory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1.
Variace 1 Střídavý proud, trojfázový proud, transformátory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1.
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor 2007. Sylabus tématu
 Stýskala, 2006 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Sylabus tématu 1. Elektromagnetické
Stýskala, 2006 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Sylabus tématu 1. Elektromagnetické
R 0 = R 1 + R 2. V současnosti je R Z >> R 0, dělič se počítá naprázdno R 1. U 1 R 2 R Z U 2 Přenos:
 Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor Elektrické stroje
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Fyzika II, FMMI. 1. Elektrostatické pole
 Fyzika II, FMMI 1. Elektrostatické pole 1.1 Jaká je velikost celkového náboje (kladného i záporného), který je obsažen v 5 kg železa? Předpokládejme, že by se tento náboj rovnoměrně rozmístil do dvou malých
Fyzika II, FMMI 1. Elektrostatické pole 1.1 Jaká je velikost celkového náboje (kladného i záporného), který je obsažen v 5 kg železa? Předpokládejme, že by se tento náboj rovnoměrně rozmístil do dvou malých
Elektrický výkon v obvodu se střídavým proudem. Účinnost, účinník, činný a jalový proud
 Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
Rapid tooling. Rapid tooling. Zpracoval: Přemysl Pokorný. Pracoviště: TUL- KVS
 Zpracoval: Přemysl Pokorný Pracoviště: TUL- KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný
Zpracoval: Přemysl Pokorný Pracoviště: TUL- KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. In-TECH 2, označuje společný
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ
 Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ KET Merení fyzikálních složek životního prostredí Cejchování snímacu chvení Merení hluku zarízení vypracoval: Václav Laxa datum merení: 13.11.2006
Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ KET Merení fyzikálních složek životního prostredí Cejchování snímacu chvení Merení hluku zarízení vypracoval: Václav Laxa datum merení: 13.11.2006
Elektrický signál - základní elektrické veličiny
 EVROPSKÝ SOCIÁLNÍ FOND Elektrický signál - základní elektrické veličiny PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
EVROPSKÝ SOCIÁLNÍ FOND Elektrický signál - základní elektrické veličiny PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ
 B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Vibroakustická diagnostika
 Vibroakustická diagnostika frekvenční analýza, ultrazvukové emise Vibroakustické metody Vibroakustika jako hlavní diagnostický signál používá chvění kmitání vibrace hlučnost Použitý diagnostický signál
Vibroakustická diagnostika frekvenční analýza, ultrazvukové emise Vibroakustické metody Vibroakustika jako hlavní diagnostický signál používá chvění kmitání vibrace hlučnost Použitý diagnostický signál
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Rezonanční elektromotor II
 - 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
- 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
Učební texty Diagnostika snímače 2.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
9. ČIDLA A PŘEVODNÍKY
 Úvod do metrologie - 49-9. ČIDLA A PŘEVODNÍKY (V.LYSENKO) Čidlo (senzor, detektor, receptor) je em jedné fyzikální veličiny na jinou fyzikální veličinu. Snímač (senzor + obvod pro zpracování ) je to člen
Úvod do metrologie - 49-9. ČIDLA A PŘEVODNÍKY (V.LYSENKO) Čidlo (senzor, detektor, receptor) je em jedné fyzikální veličiny na jinou fyzikální veličinu. Snímač (senzor + obvod pro zpracování ) je to člen
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
4. V jednom krychlovém metru (1 m 3 ) plynu je 2, molekul. Ve dvou krychlových milimetrech (2 mm 3 ) plynu je molekul
 plynu je 2, molekul. Ve dvou krychlových milimetrech (2 mm 3 ) plynu je molekul") Fyzika 20 Otázky za 2 body. Celsiova teplota t a termodynamická teplota T spolu souvisejí známým vztahem. Vyberte dvojici, která tento vztah vyjadřuje (zaokrouhleno na celá čísla) a) T = 253 K ; t = 20
Fyzika 20 Otázky za 2 body. Celsiova teplota t a termodynamická teplota T spolu souvisejí známým vztahem. Vyberte dvojici, která tento vztah vyjadřuje (zaokrouhleno na celá čísla) a) T = 253 K ; t = 20
5. POLOVODIČOVÉ MĚNIČE
 5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
ELEKTŘINA A MAGNETIZMUS kontrolní otázky a odpovědi
 ELEKTŘINA A MAGNETIZMUS kontrolní otázky a odpovědi Peter Dourmashkin MIT 2006, překlad: Vladimír Scholtz (2007) Obsah KONTROLNÍ OTÁZKY A ODPOVĚDI 2 OTÁZKA 41: ZÁVIT V HOMOGENNÍM POLI 2 OTÁZKA 42: ZÁVIT
ELEKTŘINA A MAGNETIZMUS kontrolní otázky a odpovědi Peter Dourmashkin MIT 2006, překlad: Vladimír Scholtz (2007) Obsah KONTROLNÍ OTÁZKY A ODPOVĚDI 2 OTÁZKA 41: ZÁVIT V HOMOGENNÍM POLI 2 OTÁZKA 42: ZÁVIT