Obr. 8.1 Elektrodynamický senzor rychlosti
|
|
|
- Tomáš Pavlík
- před 9 lety
- Počet zobrazení:
Transkript
1 1.1 SENZORY OTÁČEK, RYCHLOSTI A ZRYCHLENÍ - Rychlost posuvného nebo rotačního pohybu lze určit derivací výstupního signálu senzorů polohy. Přímé měření rychlosti posuvného pohybu je možné senzory s pohyblivou cívkou (elektrodynamické - viz obr. 1), nebo s pohyblivým magnetem (elektromagnetické). Elektrodynamické senzory pracují na principu indukčního zákona: U = Blv (1) Obr. 8.1 Elektrodynamický senzor rychlosti Elektromagnetické senzory pracují na principu Faradayova indukčního zákona, který je obecnější, než (1): dφ u = N dt () Senzory úhlové rychlosti a otáček Stejnosměrné točivé stroje (s permanentním magnetem nebo elektromagnetem buzeným polem) - tachometry V nejjednodušším uspořádání (obr. ) se v magnetickém poli permanentního magnetu otáčí cívka spojená s kroužky komutátoru. Výstupní napětí, měřené na sběrných kartáčcích, má v důsledku činnosti komutátoru stálou polaritu během celé otáčky a je úměrné rychlosti dle vztahu U = NSBω (3) c pro cívku o N závitech a průřezu S, rotující úhlovou rychlostí ω c v magnetickém poli B. Tachogenerátory, optimalizované pro měření úhlové rychlosti, mají několik pólových dvojic a párů vinutí. 1
: dφ u = N dt () 1.1.1 Senzory úhlové rychlosti a otáček Stejnosměrné točivé stroje (s permanentním magnetem nebo elektromagnetem buzeným polem) - tachometry V nejjednodušším uspořádání (obr.")
2 Obr. Tachodynamo Tachoalternátory s permanentními magnety se skládají z vinutého statoru a rotoru, tvořeného několika pólovými dvojicemi stálých magnetů. Typy pro malé úhlové rychlosti mohou mít až 1 pólových dvojic. Stator je složen z plechů s drážkami pro vinutí. Jedno ze statorových vinutí je napájeno ze zdroje střídavého napětí a slouží jako referenční. Ve druhém vinutí se indukuje napětí s amplitudou úměrnou rychlosti otáčení a transformačním jevem také referenční napětí. Výhodou tachoalternátorů je delší životnost a vyloučení rušivých vlivů kartáčků a kroužků. Mezi nevýhody patří nelinearity vlivem saturace při větších rychlostech, nutnost stabilizovat zdroj referenčního napětí a problémy s demodulací při náhlých změnách rychlosti. Impulsní senzory otáček Tyto velmi rozšířené senzory jsou založené na detekci polohy značky na pohybujícím se objektu. Jako detektory polohy lze použít senzory - magnetické (obr. 3d, jazýčkový kontakt, Hallův senzor nebo magnetorezistor) - indukční (rotuje permanentní magnet) nebo indukčnostní senzory (rotuje feromagnetický výstupek) (obr. 3 a, c) - senzor na principu vířivých proudů (obr. 3 c,e) - Wiegandův senzor, umístěný mezi trvalými magnety M 1, M (obr. 3.b), v němž dochází k indukci napětí při změně magnetického toku, vzniklé feromagnetickými výstupky na obvodu rotujícího objektu, - optoelektronické senzory s detekcí průchozího nebo odraženého světla (obr. 3f ).

3 Obr. 3 Detektory polohy Absolutní senzory úhlové rychlosti jsou umístěny přímo na měřeném objektu. Jsou popsány v kapitole Senzory pro navigaci Korelační princip měření rychlosti Měření rychlosti z doby t nutné k průchodu značky na pohybujícím se objektu mezi dvěma o x od sebe vzdálenými pozorovacími stanovišti patří mezi nejstarší metody. Korelační metoda je zobecněním tohoto principu. "Značkou" je některá měřitelná a náhodně proměnná veličina, vázaná na vlastnosti pohybujícího se objektu. Jako příklad může sloužit difúzní odraz světelného záření od náhodně rozložených nerovností povrchu zkoumaného objektu, snímaný dvěma senzory navzájem posunutými o x, nebo jasová informace povrchu. Označme vzorky signálu z prvního a druhého senzoru s 1 (nt v ) a s (nt v ). Úkolem je nalézt v záznamu s (nt v ) opožděnou repliku výstupu prvního senzoru, tj. s 1 (nt v τ). Úlohu vyřešíme minimalizací střední kvadratické hodnoty rozdílu s (nt v ) s 1 (nt v τ), tj. hledáním zpoždění τ, které minimalizuje výraz kde N je počet vzorků s 1 (nt v ) a s (nt v ). Vztah pro D upravíme: D = N n= 1 s D N = = [ s 1 ( nt ) 1( V τ )] n V s nt N N ( ntv ) s nt + = V n V s ntv s1 nt 1 ( ) 1( τ ) ( τ ) n= 1 (.18) (.19) První a poslední člen odpovídají energii výstupních signálů a jsou nezáporné. Výraz D bude minimální tehdy, je-li druhý člen, odpovídající svým tvarem číslicové verzi vzájemné korelace, maximální, tj. platí N R1 ( τ ) = s( nt ) s1( τ ) = max n= 1 V nt V (.0) 3

4 Poznámka: vzájemná korelace pro spojité signály je definována vztahem T R1, ( τ ) = lim s1 ( t) s ( t τ ) dt T 0 Při praktickém výpočtu vypočteme korelační funkci pro různé hodnoty zpoždění τ a hledáme maximum R 1 (τ). Z nalezené hodnoty τ max a vzdálenosti senzorů x určíme rychlost v = τ max Podstata korelační metody je ilustrována na obr..31, kde jsou dvěma optickými senzory S 1, S (bodovými, řádkovými nebo maticovými) snímány některé z optických vlastností povrchu pohybujícího se objektu. Aby vzájemná korelační funkce R 1 (τ) měla pouze jedno maximum v oblasti sledovaných zpoždění, je nutné, aby snímaná vlastnost povrchu měla charakter náhodného procesu. Větší počet lokálních extrémů, jak je tomu u povrchů s texturou, by vedl k víceznačnosti měření. x S 1 S x R 1(τ) v τ max τ Obr. 4 Korelační měření rychlosti 1. SENZORY PRO INERCIÁLNÍ NAVIGACI Inerciální navigace je založena na měření složek zrychlení ve třech osách absolutními senzory zrychlení a následné dvojnásobné integraci výstupních signálů. Dále se využívá senzorů úhlové rychlosti. Pro určení polohy je nutné znát počáteční polohu objektu. Pro podporu navigace se používá i signály z magnetických senzorů a inklinoměrů. 4
 měla pouze jedno maximum v oblasti sledovaných zpoždění, je nutné, aby snímaná vlastnost povrchu měla charakter náhodného procesu.")
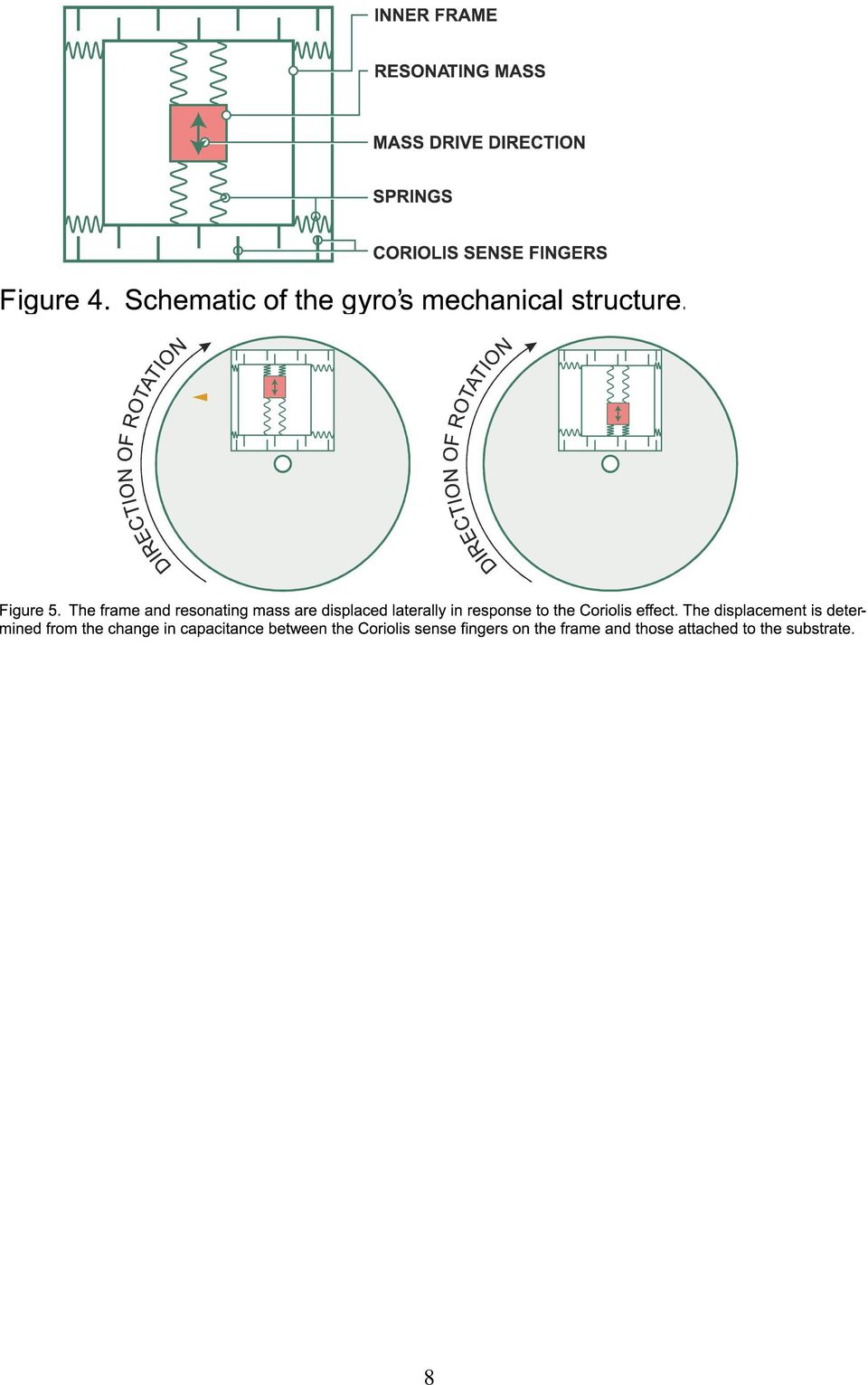
5 1..1 MEMS akcelerometr Nejrozšířenější typ MEMS akcelerometru je na obr. 5. Nebyl vyvinut pro navigaci, ale používá se pro tento účel např. v mobilních telefonech pro vykrytí výpadku GPS signálu. Používá se i jako levný inklinoměr. Základem je destička z polykrystalického křemíku, tvarovaná do dvou pružných tětiv (), zakotvených na monokrystalickém křemíkovém substrátu (1). Obě tětivy, představující tuhost k mechanického oscilátoru, jsou spojeny hřebínkem (seismická hmotnost m). Obr. 5 Mikromechanický akcelerometr ve formě integrovaného obvodu Každý z padesáti zubů hřebínku představuje střední pohyblivou elektrodu X (4) soustavy stejného počtu diferenciálních kapacitních senzorů s proměnnou vzduchovou mezerou. Jako pevné elektrody slouží systém nosníků Y, Z (5). Při působení horizontálního zrychlení (až do 50 g) např. ve směru doprava se zvýší kapacita mezi elektrodami X, Z a poklesne mezi elektrodami X, Y. Měřicí obvod je můstkového typu, elektrody Y a Z jsou napájeny pravoúhlým napětím navzájem invertovaným. Napětí nerovnováhy na odporu R je demodulováno synchronním detektorem. Výstupní napětí demodulátoru je přivedeno na elektrodu X a vyvolá elektrostatický zpětnovazení silový účinek, vyvažující působení měřeného zrychlení. Akcelerometr (Analog Devices řady ADXL) včetně měřicích obvodů je umístěn v pouzdru, užívaném pro tranzistory (TO-5), a je představitelem levných senzorů vyrobených mikromechanickými postupy. Vyrábí se i podobný 5
 soustavy stejného počtu diferenciálních kapacitních senzorů")
6 obvod bez zpětné vazby a další typy v dvouosém provedení. Tyto akcelerometry byly vyvinuty pro vybavování airbagů, ale používají se i pro mnohé další aplikace. 1.. Akcelerometry s elektromechanickou zpětnou vazbou (servoakcelerometry) Základem těchto akcelerometrů, užívaných pro vyšší přesnosti, je udržování stálé polohy seismické hmotnosti sílou odvozenou z odchylky od rovnovážné polohy. V systému na obr..35 tvoří pružně upevněná elektroda kmitavý obvod a její výchylka způsobuje změnu kapacity vůči pevné elektrodě kapacitního senzoru. Výstup obvodu pro měření kapacity produkuje chybový signál a úměrný vzrůst proudu i řídícího převodník proud-síla (cívka v mezeře radiálního magnetu) vyvolá silové působení na membránu. V rovnovážném stavu je výchylka membrány blízká nule, a proto se neuplatní její hystereze a nestálost mechanických parametrů. Hlavní předností zpětnovazebních akcelerometrů je velmi dobrá linearita (až 0,01 %), reprodukovatelnost měření ( g při rozsahu 50 g) a rozlišovací schopnost až 1µg, kde g je tíhové zrychlení. Obr..35 Zpětnovazební kapacitní akcelerometr: a) uspořádání: 1 - elektrody, - pružné členy, 3 radiálně magnetovaný permanentní magnet, 4 cívka, 5 izolace, 6 pouzdro ; b) měřicí obvod Citlivost vůči pohybům kolmým k ose se snižuje vhodně tvarovanými pružnými členy, omezujícími pohyb elektrody m ve vertikálním směru. Servoakcelerometry se užívají pro měření zrychlení v letadlech, řízených střelách, avšak také při měření úhlu sklonu ve vrtech pro geologické účely. Výrobcem je např. firma Kistler Vibrační senzor úhlové rychlosti Senzor úhlové rychlosti na principu Coriolisovy síly je na obr. 5. Ramena horní vidlice V h jsou rozkmitávána elektrostaticky v rovině plochy senzoru a radiální rychlost jejich pohybu má amplitudu v r. Obě vidlice se otáčejí měřenou úhlovou rychlostí ω kolem hlavní osy. Tím vznikne Coriolisova síla daná vektorovým součinem F = mω vr (.1) 6
 vyvolá silové působení na membránu.")
7 Na ramena vidlice kmitající v protifázi působí dvojice Coriolisových sil, takže na spojnici obou ramen vzniká krouticí moment M k, úměrný měřené hodnotě ω. Obr. 5 Senzor úhlové rychlosti na principu Coriolisovy síly (dle firmy BEI) Periodicky proměnný moment M k vybudí kmity spodní (snímací) vidlice V d a jejich amplituda, úměrná ω, je snímána např. kapacitně. Signál senzoru je zpracován koherentním demodulátorem KD (= synchronní detektor) s referenčním signálem odvozeným z generátoru buzení kmitů horní vidlice. Tato koncepce umožňuje dosáhnout extrémních citlivostí. Senzor je vyroben ze synteticky připraveného krystalu křemene, který vyniká velikou stabilitou mechanických parametrů v čase a teplotě. Frekvence kmitů je tedy stálá, činitel jakosti rezonátoru Q dosahuje vysokých hodnot a k udržení kmitů vidlice stačí výkon asi 10 µw. Navíc syntetický křemen může být zpracováván chemickými metodami, dobře známými z technologie výroby polovodičových prvků. Na podobném principu jsou založeny mikromechanické (MEMS) gyroskopy. 7

8 8
9 Všechny vibrační senzory úhlové rychlosti jsou spolehlivější, levnější a menší než klasické mechanické gyroskopy, jejich dlouhodobá stabilita je však nižší. Špičkových přesností dosahují optické gyroskopy Optický vláknový gyroskop Tento senzor úhlové rychlosti s fázovou modulací je aplikací Sagnacova jevu. Sagnac (1913) zjistil, že při rotaci kruhového vlnovodu, v němž proti sobě obíhají dva světelné svazky úhlovou rychlostí Ω, je obvodová rychlost svazku ve směru Ω zvyšována a pro opačný směr snižována přibližně o hodnotu v = Ω.R, zanedbáme-li relativistické efekty (obr..33). Ve vztazích je c rychlost světla, v = Ω.R je obvodová rychlost vyvolaná otáčením soustavy a n index lomu světlovodu. Rychlost světla ve světlovodu je pak c/n. Pro dobu oběhu v obou směrech platí t + πr πr = =, u c + ΩR n t πr πr = = u c + ΩR n 9
. Ve vztazích je c rychlost světla, v = Ω.")
10 Φ Φ 1 11 R Φ1 Obr..33 Sagnacův jev a hledaný rozdíl fáze Ω Dále určíme rozdíl dob oběhu t = c ϕ = π t = 8π R nλ πr πr = c c ΩR + ΩR n n n Ω λ c 4πΩR c Ω R n 4πΩR c n Pro přesný výpočet výsledných obvodových rychlostí je ovšem nutno použít Lorentzovy transformace. Obvodová rychlost ve směru Φ 11 je pak dána vztahem c + v u n + = c v 1+ n c ze kterého je patrno, že pro n = 1 tento princip nefunguje. Měření fázového rozdílu se realizuje Sagnacovým interferometrem (obr..34) s jednovidovými optickými vlákny. Pro méně náročné aplikace je možno laser nahradit laserovou diodou, která má nižší koherenci. Obr..34 Gyroskop s optickými vlákny Paprsky ze zdroje Z procházejí děličem svazku D 1, polarizátorem P, kolimační optikou S 1, S a optickým filtrem F, nutným zejména v případě nekoherentních zdrojů světla. V druhém optickém děliči D vznikají dva svazky, vedené optikou S 3 a S 4 do obou konců cívky optického vlákna, a šíří se v něm opačným směrem. Změny intenzity světla, odpovídající konstruktivní a destruktivní interferenci obou svazků, jsou snímány optoelektronickým senzorem - detektorem OD. V přístroji bývá použita modulace intenzity interferenčních obrazců proměnnou fází. Fázový modulátor FM je optické vlákno, navinuté na válci z piezoelektrického materiálu, deformovaného periodicky piezostrikčními účinky napětí z generátoru G o kmitočtu f m. Výhodou je možnost zpracování signálu z detektoru metodami synchronní demodulace (SD). Citlivost může být zvýšena zvětšením délky optického vlákna, které pak tvoří cívku o délce až několik km. Popisovaná koncepce gyroskopu se vyznačuje odolností vůči otřesům a gravitačním účinkům, dodržení délky vlákna v cívce a její geometrie nejsou kritické, výrobní náklady relativně nízké. 10
 s jednovidovými optickými vlákny.")
11 Citlivost a stabilita jsou vyhovující pro hromadné aplikace, např. navigaci vozidel, měření úhlových posuvů a pod. Pro náročnější účely navigace letadel je určeno komplikovanější zpětnovazební uspořádání. Chyba měření klesne až na hodnoty řádově 0,001 o /h. 1.3 SENZORY VIBRACÍ Kmitavým pohybem se rozumí časová změna polohy vybraného bodu na objektu vzhledem ke vztažnému (referenčnímu) bodu. K přímému měření okamžitých hodnot polohy je tedy obecně možné použít senzory polohy. V tomto případě jde o relativní senzory kmitavého pohybu, jelikož je určována poloha relativně k pevnému vztažnému bodu. Příkladem je laserový vibrometr. Relativní měření kmitavého pohybu nelze realizovat u pohybujících se objektů (vozidel) a také v případě, kdy v okolí kmitajícího objektu nelze najít pevný vztažný bod. To je případ měření kmitání těžkých nebo rozlehlých objektů, jejichž vibrace jsou přenášeny do okolí. Proto se převážně používají absolutní senzory kmitavého pohybu, v němž je vztažný bod vytvořen uvnitř senzoru za jistých dynamických podmínek. Pak se měří poloha vůči tomuto bodu relativním senzorem polohy, umístěným uvnitř absolutního senzoru kmitavého pohybu Absolutní senzory kmitavého pohybu Podmínky správné činnosti absolutního senzoru kmitavého pohybu lze odvodit z obecného modelu senzorů tohoto typu znázorněného na obr..4 a) b) Obr..4 Absolutní senzor kmitavého pohybu: a) model, b) amplitudová charakteristika (B=b/b kr je poměrné tlumení) Podstatou senzoru je mechanická kmitavá soustava tvořená hmotností m, pružinou o tuhosti k a tlumením, o němž budeme předpokládat, že je úměrné rychlosti pohybu s konstantou úměrnosti b (viskózní tlumení). Soustava je pak popsána rovnováhou setrvačné, direktivní a tlumicí síly, tj. pohybovou rovnicí. Rovnováha sil je vztažena k myšlenému pevnému bodu A, vůči kterému se měří kmity objektu y(t), takže platí pohybová rovnice d z dx m + b + kx = 0 dt dt (.13) Pro časově proměnné složky souřadnic platí (obr..4) 11

12 z(t) = x(t) + y(t) S použitím tohoto vztahu se pohybová rovnice upraví na tvar d x dx d y m + b + kx = m dt dt dt (.14) Zanedbáme-li tlumení, rovnice se zjednoduší na kde ω 0 = k m je rezonanční kmitočet. (.15) Pro harmonický pohyb tělesa, tj. y( t) = y0 sinωt bude řešení ve tvaru x( t) = x0 sinωt. Po dosazení za x a y do předcházející rovnice dostáváme ω y Amplitudová charakteristika je tedy dána vztahem 0 sin ωt = ω x0 sin ωt ω0 x0 sin ωt x y 0 0 ω = ω ω 0 (.16) Pro měření parametrů kmitavého pohybu jsou důležité tyto zvláštní případy průběhu amplitudové a fázové frekvenční charakteristiky: a) ω «ω 0 Pak platí přibližně x 0 = ω y0 /ω0 tj. amplituda x 0 je přímo úměrná amplitudě měřeného zrychlení a = a 0 sinωt. Na tomto principu jsou založeny všechny akcelerometry. b) ω» ω 0 Pak platí přibližně x = y V tomto režimu senzor měří amplitudu (dráhu) pohybu a s ohledem na fázi platí x(t) = y(t) a z(t) = 0 d y d x = ω0 x dt dt Hmotnost m je tedy v klidu (označuje se jako seismická) a tvoří hledaný vztažný bod uvnitř senzoru. K určení pohybu x(t) je pak možné použít jakéhokoliv senzoru, měřícího polohu. V dalším uvedeme základní typy absolutních senzorů vibrací Elektrodynamický senzor vibrací Seismickou hmotnost zde představuje hmotnost snímací cívky 1 (obr..5) a vinutí, které vytváří viskózní tlumení indukovanými proudy. Pružný element představuje membrána 5 pevně spojená s válcovitou částí magnetického obvodu 3. Pohybem snímací cívky v radiálním poli mezery permanentního magnetu se indukuje napětí u =Blv úměrné rychlosti pohybu cívky v mezeře. Rezonanční kmitočet elektrodynamického senzoru splňuje podmínku pro měření dráhy pohybu, a proto ve snímací cívce indukované napětí odpovídá rychlosti. Integračním článkem se snadno získá signál úměrný amplitudě (dráze) pohybu. Obdobně se derivací získá signál úměrný zrychlení měřených vibrací. Univerzálnost elektrodynamického senzoru patří mezi jeho hlavní výhody. 1
 Pro měření parametrů kmitavého pohybu jsou důležité tyto zvláštní případy průběhu amplitudové a fázové frekvenční charakteristiky: a) ω «ω 0 Pak platí přibližně x 0 = ω y0 /ω0 tj.")
13 Obr..5 Elektrodynamický senzor kmitů a měřicí obvod Rezonační frekvence se pohybují od 1 až do 100 Hz, hmotnosti 0 g až 5 kg, výška 30 až 100 mm. Tyto senzory (označované také jako geofony) jsou vhodné pro monitorování vibrací strojů, stavebních konstrukcí a střežení chráněných prostor Akcelerometry pro měření vibrací Podmínkou pro měření zrychlení kmitavého pohybu v širokém rozmezí kmitočtů je velká rezonanční frekvence ω 0. Z tohoto hlediska je výhodné piezoelektrické snímání polohy seismické hmotnosti vůči pouzdru senzoru, jelikož velká tuhost a malá hmotnost piezoelektrického materiálu dovoluje dosáhnout velké rezonanční frekvence (až 50 khz). Typická frekvenční charakteristika je na obr..6. Piezoelektrický akcelerometr nelze použít pro měření statického zrychlení (vytvořený náboj se vybíjí přes vnitřní odpor elementu a svodové odpory viz obr..6 b). Smyková deformace piezoelektrického elementu přináší podstatné výhody, zejména pokud jde o zmenšení citlivosti na rušivé vlivy, jako deformace základny pouzdra senzoru, teplotní dilatace, akustické efekty. Využívá se zde skutečnosti, že náboje vyvolané teplotní dilatací a smykovým namáháním nevznikají na stejných plochách elementu. Navíc nábojová citlivost při smykové deformaci je podstatně vyšší než při kompresi. Typickým příkladem senzoru tohoto typu je tzv. delta shear akcelerometr firmy Bruel - Kjaer na obr..7. K trojúhelníkovému trnu (3), spojenému se základnou pouzdra (1) jsou kovovým prstencem přes segmenty () přitlačovány tři destičkové piezokeramické elementy (4). Seismickou hmotnost m představuje prstenec a segmenty, tuhost k tvoří piezokeramické elementy. Akcelerometry tohoto typu lze použít až do zrychlení g. A[dB] 30 0 pracovní oblast a b 0,001 0,01 0,1 1 ω ω n Obr..6 Frekvenční charakteristika piezoelektrického akcelerometru: a) ideální, b) skutečná Obr..7 Piezoelektrický akcelerometr se smykovým namáháním Mechanický kmitavý obvod u kapacitních akcelerometrů je tvořen tenkou membránou s vhodně tvarovanými spirálovými štěrbinami a několika otvory. Membrána je umístěna mezi pevnými elektrodami diferenciálního kapacitního senzoru s počátečními vzduchovými mezerami. Pohy- 13

14 bem membrány se pumpuje vzduch paralelně k rovině elektrod přes otvory v membráně. Vzniká tak obdoba viskózního tlumení s koeficientem b asi 0,7. Mechanický kmitavý systém, vytvořený vetknutým nosníkem (k) a hmotností m, je základem několika typů akcelerometrů. Nejznámější je snímání deformace nosníku poblíž místa vetknutí tenzometry R 1, R (obr..8). Systém je vhodný i pro mikromechanickou technologii. Obr..8 Akcelerometr s kmitajícím nosníčkem Jiný typ MEMS akcelerometru je na obr..9. Základem je destička z polykrystalického křemíku, tvarovaná do dvou pružných tětiv (), zakotvených na monokrystalickém křemíkovém substrátu (1). Obě tětivy, představující tuhost k mechanického oscilátoru, jsou spojeny hřebínkem (seismická hmotnost m). Obr..9 Mikromechanický akcelerometr ve formě integrovaného obvodu Každý z padesáti zubů hřebínku představuje střední pohyblivou elektrodu X (4) soustavy stejného počtu diferenciálních kapacitních senzorů s proměnnou vzduchovou mezerou. Jako pevné elektrody slouží systém nosníků Y, Z (5). Při působení horizontálního zrychlení (až do 50 g) např. ve směru doprava se zvýší kapacita mezi elektrodami X, Z a poklesne mezi elektrodami X, Y. Měřicí obvod je můstkového typu, elektrody Y a Z jsou napájeny pravoúhlým napětím navzájem invertovaným. Napětí nerovnováhy na odporu R je demodulováno synchronním detektorem. Výstupní napětí demodulátoru je přivedeno na elektrodu X a vyvolá elektrostatický zpětnovazení silový účinek, vyvažující působení měřeného zrychlení. Akcelerometr (Analog Devices řady ADXL) včetně měřicích obvodů je umístěn v pouzdru, užívaném pro tranzistory (TO-5), a je představitelem levných senzorů vyrobených mikromechanickými postupy. Vyrábí se i podobný obvod bez zpětné vazby a další typy v dvouosém provedení. Tyto akcelerometry byly vyvinuty pro vybavování airbagů, ale používají se i pro mnohé další aplikace (např. měření náklonu a zrychlení v robotice). 14

15 15

8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací.
 8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací. přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
8. Senzory a převodníky pro měření otáček, rychlosti a zrychlení. Měření vibrací. přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
Senzory mechanického kmitavého pohybu (vibrací)
") Senzory mechanického kmitavého pohybu (vibrací) - relativní senzor polohy + vnější vztažný bod často bezkontaktní - absolutní uvnitř vztažný bod + relativní senzor polohy elektrodynamický senzor vibrací
Senzory mechanického kmitavého pohybu (vibrací) - relativní senzor polohy + vnější vztažný bod často bezkontaktní - absolutní uvnitř vztažný bod + relativní senzor polohy elektrodynamický senzor vibrací
Zpracoval: Ing Vladimír Michna. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
 Snímače č polohy, dráhy a jejich derivací - 2 Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Snímače č polohy, dráhy a jejich derivací - 2 Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Kapacitní senzory. ε r2. Změna kapacity důsledkem změny X. b) c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod
 c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod") Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
9. ČIDLA A PŘEVODNÍKY
 Úvod do metrologie - 49-9. ČIDLA A PŘEVODNÍKY (V.LYSENKO) Čidlo (senzor, detektor, receptor) je em jedné fyzikální veličiny na jinou fyzikální veličinu. Snímač (senzor + obvod pro zpracování ) je to člen
Úvod do metrologie - 49-9. ČIDLA A PŘEVODNÍKY (V.LYSENKO) Čidlo (senzor, detektor, receptor) je em jedné fyzikální veličiny na jinou fyzikální veličinu. Snímač (senzor + obvod pro zpracování ) je to člen
1 SENZORY SÍLY, TLAKU A HMOTNOSTI
 1 SENZORY SÍLY, TLAKU A HMOTNOSTI Senzory používající ve většině případů princip převodu síly, tlaku a tíhy na deformaci. Využívají fyzikálních účinků síly. Časově proměnná síla vyvolá zrychlení a hmotnosti
1 SENZORY SÍLY, TLAKU A HMOTNOSTI Senzory používající ve většině případů princip převodu síly, tlaku a tíhy na deformaci. Využívají fyzikálních účinků síly. Časově proměnná síla vyvolá zrychlení a hmotnosti
 !"#$% &'(')!"#$%* je funkční prvek tvořící vstupní blok měřícího řetězce, který je v přímém styku s měřeným prostředím. Citlivá část senzoru se někdy označuje jako čidlo. Senzor snímá sledovanou fyzikální
!"#$% &'(')!"#$%* je funkční prvek tvořící vstupní blok měřícího řetězce, který je v přímém styku s měřeným prostředím. Citlivá část senzoru se někdy označuje jako čidlo. Senzor snímá sledovanou fyzikální
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Základní pojmy. p= [Pa, N, m S. Definice tlaku: Síla působící kolmo na jednotku plochy. diference. tlaková. Přetlak. atmosférický tlak. Podtlak.
 Základní pojmy Definice tlaku: Síla působící kolmo na jednotku plochy F p= [Pa, N, m S 2 ] p Přetlak tlaková diference atmosférický tlak absolutní tlak Podtlak absolutní nula t 2 ozdělení tlakoměrů Podle
Základní pojmy Definice tlaku: Síla působící kolmo na jednotku plochy F p= [Pa, N, m S 2 ] p Přetlak tlaková diference atmosférický tlak absolutní tlak Podtlak absolutní nula t 2 ozdělení tlakoměrů Podle
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
19. Elektromagnetická indukce
 19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014
 Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
POPIS VYNÁLEZU K AUTORSKÉMU OSVĚDČENÍ. (Bl) (И) ČESKOSLOVENSKA SOCIALISTICKÁ REPUBLIKA ( 1S ) (SI) Int Cl* G 21 G 4/08
 (И) ČESKOSLOVENSKA SOCIALISTICKÁ REPUBLIKA ( 1S ) (SI) Int Cl* G 21 G 4/08") ČESKOSLOVENSKA SOCIALISTICKÁ REPUBLIKA ( 1S ) POPIS VYNÁLEZU K AUTORSKÉMU OSVĚDČENÍ 262470 (И) (Bl) (22) přihláženo 25 04 87 (21) PV 2926-87.V (SI) Int Cl* G 21 G 4/08 ÚFTAD PRO VYNÁLEZY A OBJEVY (40)
ČESKOSLOVENSKA SOCIALISTICKÁ REPUBLIKA ( 1S ) POPIS VYNÁLEZU K AUTORSKÉMU OSVĚDČENÍ 262470 (И) (Bl) (22) přihláženo 25 04 87 (21) PV 2926-87.V (SI) Int Cl* G 21 G 4/08 ÚFTAD PRO VYNÁLEZY A OBJEVY (40)
O ptoelektronické senzory polohy 75
 O bsah Str. 1. ÚVOD (M. Kreitll) 13 1.1. Senzor 13 1.2. Technologie výroby senzorů 14 1.3. M ěřicí řetězec 14 1.4. Inteligentní senzor 16 1.5. Technické p aram etry senzorů 17 1.5.1. Statické vlastnosti
O bsah Str. 1. ÚVOD (M. Kreitll) 13 1.1. Senzor 13 1.2. Technologie výroby senzorů 14 1.3. M ěřicí řetězec 14 1.4. Inteligentní senzor 16 1.5. Technické p aram etry senzorů 17 1.5.1. Statické vlastnosti
FYZIKA II. Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování)
") FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
elektrické filtry Jiří Petržela filtry založené na jiných fyzikálních principech
 Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků,
 5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
Fyzika II, FMMI. 1. Elektrostatické pole
 Fyzika II, FMMI 1. Elektrostatické pole 1.1 Jaká je velikost celkového náboje (kladného i záporného), který je obsažen v 5 kg železa? Předpokládejme, že by se tento náboj rovnoměrně rozmístil do dvou malých
Fyzika II, FMMI 1. Elektrostatické pole 1.1 Jaká je velikost celkového náboje (kladného i záporného), který je obsažen v 5 kg železa? Předpokládejme, že by se tento náboj rovnoměrně rozmístil do dvou malých
Generátorové senzory. Termoelektrický článek Piezoelektrické senzory Indukční senzory
 Generátorové senzory Termoelektrický článek Piezoelektrické senzory Indukční senzory Obecné vlastnosti termoelektrických článků využívá Seebeckova efektu vodivé spojení dvou různých vodivých materiálů
Generátorové senzory Termoelektrický článek Piezoelektrické senzory Indukční senzory Obecné vlastnosti termoelektrických článků využívá Seebeckova efektu vodivé spojení dvou různých vodivých materiálů
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
6. Měření veličin v mechanice tuhých a poddajných látek
 6. Měření veličin v mechanice tuhých a poddajných látek Pro účely měření mechanických veličin (síla, tlak, mechanický moment, změna polohy, rychlost změny polohy, amplituda, frekvence a zrychlení mechanických
6. Měření veličin v mechanice tuhých a poddajných látek Pro účely měření mechanických veličin (síla, tlak, mechanický moment, změna polohy, rychlost změny polohy, amplituda, frekvence a zrychlení mechanických
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
3.1 Magnetické pole ve vakuu a v látkovén prostředí
 3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Senzory tlaku. df ds. p = F.. síla [N] S.. plocha [m 3 ] 1 atm = 100 kpa. - definice tlaku: 2 způsoby měření tlaku: změna rozměrů.
![Senzory tlaku. df ds. p = F.. síla [N] S.. plocha [m 3 ] 1 atm = 100 kpa. - definice tlaku: 2 způsoby měření tlaku: změna rozměrů.](/thumbs/57/40030698.jpg "Senzory tlaku. df ds. p = F.. síla [N] S.. plocha [m 3 ] 1 atm = 100 kpa. - definice tlaku: 2 způsoby měření tlaku: změna rozměrů.") Senzory tlaku - definice tlaku: 2 způsoby měření tlaku: p = df ds F.. síla [N] S.. plocha [m 3 ] 1 atm = 100 kpa p F pružný člen změna rozměrů přímý (intrinsický) senzor senzor mechanického napětí (v prostředích,
Senzory tlaku - definice tlaku: 2 způsoby měření tlaku: p = df ds F.. síla [N] S.. plocha [m 3 ] 1 atm = 100 kpa p F pružný člen změna rozměrů přímý (intrinsický) senzor senzor mechanického napětí (v prostředích,
9.7. Vybrané aplikace
 Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Nízkofrekvenční (do 1 MHz) Vysokofrekvenční (stovky MHz až jednotky GHz) Generátory cm vln (až desítky GHz)
 Vysokofrekvenční (stovky MHz až jednotky GHz) Generátory cm vln (až desítky GHz)") Provazník oscilatory.docx Oscilátory Oscilátory dělíme podle několika hledisek (uvedené třídění není zcela jednotné - bylo použito vžitých názvů, které vznikaly v různém období vývoje a za zcela odlišných
Provazník oscilatory.docx Oscilátory Oscilátory dělíme podle několika hledisek (uvedené třídění není zcela jednotné - bylo použito vžitých názvů, které vznikaly v různém období vývoje a za zcela odlišných
Fyzika, maturitní okruhy (profilová část), školní rok 2014/2015 Gymnázium INTEGRA BRNO
, školní rok 2014/2015 Gymnázium INTEGRA BRNO") 1. Jednotky a veličiny soustava SI odvozené jednotky násobky a díly jednotek skalární a vektorové fyzikální veličiny rozměrová analýza 2. Kinematika hmotného bodu základní pojmy kinematiky hmotného bodu
1. Jednotky a veličiny soustava SI odvozené jednotky násobky a díly jednotek skalární a vektorové fyzikální veličiny rozměrová analýza 2. Kinematika hmotného bodu základní pojmy kinematiky hmotného bodu
Měření neelektrických veličin. Fakulta strojního inženýrství VUT v Brně Ústav konstruování
 Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Tématické okruhy teoretických zkoušek Part 66 1 Modul 3 Základy elektrotechniky
 Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Gymnázium, Havířov - Město, Komenského 2 MATURITNÍ OTÁZKY Z FYZIKY Školní rok: 2012/2013
 1. a) Kinematika hmotného bodu klasifikace pohybů poloha, okamžitá a průměrná rychlost, zrychlení hmotného bodu grafické znázornění dráhy, rychlosti a zrychlení na čase kinematika volného pádu a rovnoměrného
1. a) Kinematika hmotného bodu klasifikace pohybů poloha, okamžitá a průměrná rychlost, zrychlení hmotného bodu grafické znázornění dráhy, rychlosti a zrychlení na čase kinematika volného pádu a rovnoměrného
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Elektromechanické měřicí přístroje
 Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Technická diagnostika Měření a diagnostika vibrací Učební text Ivan Jaksch Liberec 2010 Materiál vznikl v rámci projektu
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Technická diagnostika Měření a diagnostika vibrací Učební text Ivan Jaksch Liberec 2010 Materiál vznikl v rámci projektu
Učební texty Diagnostika snímače 2.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky
 vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky") Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
Laboratorní úloha č. 2 Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon. Max Šauer
 Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Senzory průtoku tekutin
 Senzory průtoku tekutin Průtok - hmotnostní - objemový - rychlostní Druhy proudění - laminární parabolický rychlostní profil - turbulentní víry Způsoby měření -přímé: dávkovací senzory, čerpadla -nepřímé:
Senzory průtoku tekutin Průtok - hmotnostní - objemový - rychlostní Druhy proudění - laminární parabolický rychlostní profil - turbulentní víry Způsoby měření -přímé: dávkovací senzory, čerpadla -nepřímé:
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry
 18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
Název: Téma: Autor: Číslo: Prosinec 2013. Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY. 1.1 Vytvoření točivého magnetického pole
 1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
ELEKTROMAGNETICKÉ POLE
 ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
FYZIKA II. Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce
 a Elektromagnetická indukce") FYZIKA II Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce Osnova přednášky tenká cívka, velmi dlouhý solenoid, toroid magnetické pole na ose proudové smyčky
FYZIKA II Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce Osnova přednášky tenká cívka, velmi dlouhý solenoid, toroid magnetické pole na ose proudové smyčky
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN
 METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN Milan Prášil Český metrologický institut Laboratoře primární metrologie E-mail: mprasil@cmi.cz Tato prezentace je spolufinancována Evropským sociálním fondem
METROLOGIE VYBRANÝCH KINEMATICKÝCH VELIČIN Milan Prášil Český metrologický institut Laboratoře primární metrologie E-mail: mprasil@cmi.cz Tato prezentace je spolufinancována Evropským sociálním fondem
Senzory průtoku tekutin
 Senzory průtoku tekutin Průtok - hmotnostní - objemový - rychlostní Druhy proudění - laminární parabolický rychlostní profil - turbulentní víry Způsoby měření -přímé: dávkovací senzory, čerpadla -nepřímé:
Senzory průtoku tekutin Průtok - hmotnostní - objemový - rychlostní Druhy proudění - laminární parabolický rychlostní profil - turbulentní víry Způsoby měření -přímé: dávkovací senzory, čerpadla -nepřímé:
Výukové texty. pro předmět. Měřící technika (KKS/MT) na téma. Základní charakteristika a demonstrování základních principů měření veličin
 na téma. Základní charakteristika a demonstrování základních principů měření veličin") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Základní charakteristika a demonstrování základních principů měření veličin Autor: Doc. Ing. Josef Formánek, Ph.D. Základní charakteristika a
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Základní charakteristika a demonstrování základních principů měření veličin Autor: Doc. Ing. Josef Formánek, Ph.D. Základní charakteristika a
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole
 Akustické přijímače Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole jeho součástí je elektromechanický měnič Při přeměně kmitů plynu = mikrofon Při přeměně
Akustické přijímače Akustický přijímač přeměňuje energii akustického pole daného místa na energii elektrického pole jeho součástí je elektromechanický měnič Při přeměně kmitů plynu = mikrofon Při přeměně
Základní otázky pro teoretickou část zkoušky.
 Základní otázky pro teoretickou část zkoušky. Platí shodně pro prezenční i kombinovanou formu studia. 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2.
Základní otázky pro teoretickou část zkoušky. Platí shodně pro prezenční i kombinovanou formu studia. 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2.
Elektromagnetický oscilátor
 Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
ω=2π/t, ω=2πf (rad/s) y=y m sin ωt okamžitá výchylka vliv má počáteční fáze ϕ 0
 y=y m sin ωt okamžitá výchylka vliv má počáteční fáze ϕ 0") Kmity základní popis kmitání je periodický pohyb, při kterém těleso pravidelně prochází rovnovážnou polohou mechanický oscilátor zařízení vykonávající kmity Základní veličiny Perioda T [s], frekvence f=1/t
Kmity základní popis kmitání je periodický pohyb, při kterém těleso pravidelně prochází rovnovážnou polohou mechanický oscilátor zařízení vykonávající kmity Základní veličiny Perioda T [s], frekvence f=1/t
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
AVS / EPS. Pracovní verze část 3. Ing. Radomír Mendřický, Ph.D.
 AVS / EPS Pracovní verze část 3 Ing. Radomír Mendřický, Ph.D. AVS / EPS Odměřovací zařízení - Zpětnovazební prvky a čidla Odměřovací systémy Přímé a nepřímé odměřování Odměřování přírůstkové, cyklicky
AVS / EPS Pracovní verze část 3 Ing. Radomír Mendřický, Ph.D. AVS / EPS Odměřovací zařízení - Zpětnovazební prvky a čidla Odměřovací systémy Přímé a nepřímé odměřování Odměřování přírůstkové, cyklicky
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností
 na téma Podklady k principu měření vibrací a tlumicích vlastností") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
Testovací příklady MEC2
 Testovací příklady MEC2 1. Určete, jak velká práce se vykoná při stlačení pružiny nárazníku železničního vagónu o w = 5 mm, když na její stlačení o w =15 mm 1 je zapotřebí síla F = 3 kn. 2. Jaké musí být
Testovací příklady MEC2 1. Určete, jak velká práce se vykoná při stlačení pružiny nárazníku železničního vagónu o w = 5 mm, když na její stlačení o w =15 mm 1 je zapotřebí síla F = 3 kn. 2. Jaké musí být
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Rychlostní a objemové snímače průtoku tekutin
 Rychlostní a objemové snímače průtoku tekutin Rychlostní snímače průtoku Rychlostní snímače průtoku vyhodnocují průtok nepřímo měřením střední rychlosti proudu tekutiny v STŘ. Ta závisí vzhledem k rychlostnímu
Rychlostní a objemové snímače průtoku tekutin Rychlostní snímače průtoku Rychlostní snímače průtoku vyhodnocují průtok nepřímo měřením střední rychlosti proudu tekutiny v STŘ. Ta závisí vzhledem k rychlostnímu
11 Manipulace s drobnými objekty
 11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Výukové texty pro předmět Měřící technika (KKS/MT) na téma
 na téma") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Senzory síly a hmotnosti
 Senzory síly a hmotnosti - princip využití fyzikálních účinků síly převod síla x deformace Newtonův zákon F (t) = ma speciální případ - tíhová síla G = mg převod tvar členu F ε přímý (intrinsický) vetknutý
Senzory síly a hmotnosti - princip využití fyzikálních účinků síly převod síla x deformace Newtonův zákon F (t) = ma speciální případ - tíhová síla G = mg převod tvar členu F ε přímý (intrinsický) vetknutý
Rezonanční elektromotor II
 - 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
- 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
X14 AEE + EVA Mindl. Odstředivý regulátor předstihu zážehu
 Odstředivý regulátor předstihu zážehu Legenda: 7-základová deska odstředivého regulátoru, 8-čep otočného závaží, 9-otočné závaží, 10- pružina, 11- kulisa s vačkou, Rozdělovač zapalovacích impulsů s odstředivým
Odstředivý regulátor předstihu zážehu Legenda: 7-základová deska odstředivého regulátoru, 8-čep otočného závaží, 9-otočné závaží, 10- pružina, 11- kulisa s vačkou, Rozdělovač zapalovacích impulsů s odstředivým
Maturitní témata fyzika
 Maturitní témata fyzika 1. Kinematika pohybů hmotného bodu - mechanický pohyb a jeho sledování, trajektorie, dráha - rychlost hmotného bodu - rovnoměrný pohyb - zrychlení hmotného bodu - rovnoměrně zrychlený
Maturitní témata fyzika 1. Kinematika pohybů hmotného bodu - mechanický pohyb a jeho sledování, trajektorie, dráha - rychlost hmotného bodu - rovnoměrný pohyb - zrychlení hmotného bodu - rovnoměrně zrychlený
R 0 = R 1 + R 2. V současnosti je R Z >> R 0, dělič se počítá naprázdno R 1. U 1 R 2 R Z U 2 Přenos:
 Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
e, přičemž R Pro termistor, který máte k dispozici, platí rovnice
 Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ
 Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ KET Merení fyzikálních složek životního prostredí Cejchování snímacu chvení Merení hluku zarízení vypracoval: Václav Laxa datum merení: 13.11.2006
Západoceská univerzita v Plzni FAKULTA ELEKTROTECHNICKÁ KET Merení fyzikálních složek životního prostredí Cejchování snímacu chvení Merení hluku zarízení vypracoval: Václav Laxa datum merení: 13.11.2006
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
VÍŘIVÉ PROUDY DZM 2013 1
 VÍŘIVÉ PROUDY DZM 2013 1 2 VÍŘIVÉ PROUDY ÚVOD Vířivé proudy tvoří druhou skupinu v metodách, které využívají ke zjišťování vad materiálu a výrobků působení elektromagnetického pole. Na rozdíl od metody
VÍŘIVÉ PROUDY DZM 2013 1 2 VÍŘIVÉ PROUDY ÚVOD Vířivé proudy tvoří druhou skupinu v metodách, které využívají ke zjišťování vad materiálu a výrobků působení elektromagnetického pole. Na rozdíl od metody
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ
 B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
Elektromagnetismus 163
 Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Elektrický výkon v obvodu se střídavým proudem. Účinnost, účinník, činný a jalový proud
 Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
VE ŠKOLE PRO PRAKTICKOU VÝUKU, MOTIVACI I ZÁBAVU
 VE ŠKOLE PRO PRAKTICKOU VÝUKU, MOTIVACI I ZÁBAVU CZ.1.07/1.1.24/01.0066 Střední škola elektrotechnická, Ostrava, Na Jízdárně 30, příspěvková organizace 2014 POKYNY KE STUDIU: ČAS KE STUDIU Čas potřebný
VE ŠKOLE PRO PRAKTICKOU VÝUKU, MOTIVACI I ZÁBAVU CZ.1.07/1.1.24/01.0066 Střední škola elektrotechnická, Ostrava, Na Jízdárně 30, příspěvková organizace 2014 POKYNY KE STUDIU: ČAS KE STUDIU Čas potřebný
9. MĚŘENÍ SÍLY TENZOMETRICKÝM MŮSTKEM
 9. MĚŘENÍ SÍLY TENZOMETICKÝM MŮSTKEM Úvod: Tenzometry se používají např. pro: Měření deformací objektů. Měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů. Měření zatížení
9. MĚŘENÍ SÍLY TENZOMETICKÝM MŮSTKEM Úvod: Tenzometry se používají např. pro: Měření deformací objektů. Měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů. Měření zatížení
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ Vlnění
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Vlnění Vhodíme-li na klidnou vodní hladinu kámen, hladina se jeho dopadem rozkmitá a z místa rozruchu se začnou
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Vlnění Vhodíme-li na klidnou vodní hladinu kámen, hladina se jeho dopadem rozkmitá a z místa rozruchu se začnou
Měření pilového a sinusového průběhu pomocí digitálního osciloskopu
 Měření pilového a sinusového průběhu pomocí digitálního osciloskopu Úkol : 1. Změřte za pomoci digitálního osciloskopu průběh pilového signálu a zaznamenejte do protokolu : - čas t, po který trvá sestupná
Měření pilového a sinusového průběhu pomocí digitálního osciloskopu Úkol : 1. Změřte za pomoci digitálního osciloskopu průběh pilového signálu a zaznamenejte do protokolu : - čas t, po který trvá sestupná
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU
 6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
(1 + v ) (5 bodů) Pozor! Je nutné si uvědomit, že v a f mají opačný směr! Síla působí proti pohybu.
 (5 bodů) Pozor! Je nutné si uvědomit, že v a f mají opačný směr! Síla působí proti pohybu.") Přijímací zkouška na navazující magisterské studium - 017 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Těleso s hmotností
Přijímací zkouška na navazující magisterské studium - 017 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Těleso s hmotností
Laboratorní úloha č. 4 - Kmity II
 Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
GYROSKOPY, AKCELEROMETRY A INFRAČERVENÉ SNÍMAČE
 GYROSKOPY, AKCELEROMETRY A INFRAČERVENÉ SNÍMAČE (2.8, 2.9 a 2.10) Ing. Pavel VYLEGALA 2014 Gyroskopy Gyroskop byl vyvinut vědci pro studium spinu a rotace Země. Studium pohybu gyroskopu vedlo k porozumění
GYROSKOPY, AKCELEROMETRY A INFRAČERVENÉ SNÍMAČE (2.8, 2.9 a 2.10) Ing. Pavel VYLEGALA 2014 Gyroskopy Gyroskop byl vyvinut vědci pro studium spinu a rotace Země. Studium pohybu gyroskopu vedlo k porozumění