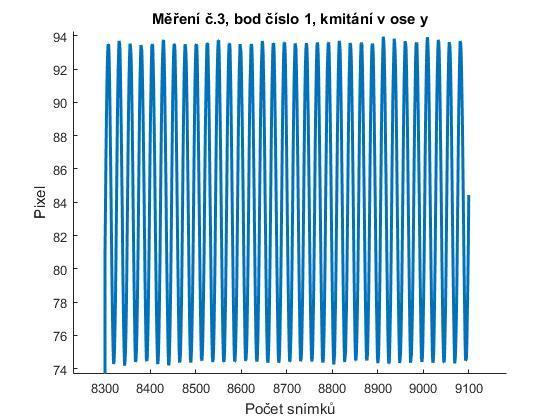
Vyhodnocení experimentálního měření kmitání vibrační třídičky pomocí optické metody
|
|
|
- Rostislav Kučera
- před 5 lety
- Počet zobrazení:
Transkript


1 Vyhodnocení experimentálního měření kmitání vibrační třídičky pomocí optické metody Bc. Martin Machač, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, Praha 6, Česká republika Abstrakt Tato práce je zaměřena na měření hodnot kmitání vibrační třídičky za pomoci vysokofrekvenční kamery, jejíž data jsou zpracována v softwaru Matlab. Cílem práce je analýza kmitání při určitých frekvencích vibrační třídičky v závislosti na daném časovém úseku. Výstupní data jsou etalonem pro porovnání s matematicko-fyzikálním modelem. Klíčová slova: Kmitání s n volnosti; vibrační třídička; MATLAB; optické metody 1. Úvod V této práci bude popsáno experimentální měření vibrační třídičky za pomoci vysokofrekvenční kamery, která snímá pohyb třídičky. Data z vysokofrekvenční kamery jsou dále zpracovávána pomocí softwaru Matlab a výsledkem jsou grafy, které zobrazují kmitání v ose x a ose y, dále graf natočení φ v závislosti na počtu snímků. 2. Definice pojmů a problému 2.1. Vibrační třídička Vibrační třídička je zařízení sloužící k třídění jednotlivých frakcí sypkého materiálu. Vibrační třídička popisovaná v této práci byla zhotovena pro třídění frakcí semínek a slupek za pomoci čtyř na sobě položených sít. Síta konají posuvný přímočarý pohyb, za pomoci excentrického mechanismu, přichyceného k rámu vibrační třídičky viz obr.:1 frekvence otáček elektromotoru se vibrační třídička uklidnila. Po dalším zvýšení byla nalezena druhá vlastní frekvence a po dalším zvýšení otáček elektromotoru již třídička ztratila svou funkci, protože síta zůstala v klidu, ale rám se rozkmital. Po zjištění tohoto chování byl realizován matematicko-fyzikální model, který by měl toto chování popisovat, a dále bylo třeba změřit výchylky reálné vibrační třídičky, čímž se zabývá tato práce Výběr metody měření Jako nejvhodnější metoda pro měření kmitání vibrační třídičky byla zvolena optická metoda. Jedná se o metodu, kdy se využívá obrazový záznam pomocí kamery. Tento záznam je dále softwarově vyhodnocen. Kromě optické metody byly zvažovány další metody, nicméně pohyb třídičky není pouze v jedné rovině, nýbrž ve dvou rovinách, respektive při vyšších otáčkách motoru třídička kmitá i do třetího směru. Pohyb do třetího směru je ale vzhledem k ostatním pohybům zanedbatelný, a proto se celá soustava dá řešit jako rovinná úloha. 3. Postup měření 3.1. Výběr kamery Obr. 1: Schéma vibrační třídičky Pro záznam byl instalován papír, se čtyřmi kulatými body viz obr.: Definice problému Pro zamezení přenosu dynamických sil do stolu byly instalovány čtyři silentbloky, ale tyto silentbloky byly nahrazeny pružinami. Nahrazení bylo provedeno za účelem zjednodušení analytického výpočtu, protože pryž nemá lineární průběh tuhosti. Toto nahrazení mělo neblahý následek, třídička díky těmto pružinám začala už při malých úhlových frekvencích tzv.: hopsat. Tento jev způsobilo naladění na vlastní frekvenci, po zvýšení Obr. 2: Instalovaný papír s body Kontakt na autora: Martin.machac@fs.cvut.cz

2 Jako první byla vybrána obyčejná kamera. Touto kamerou byl pořízen záznam. Problém ovšem nastal ve chvíli, kdy bylo provedeno zpracování. Kamera měla malé rozlišení a nízký počet snímků za vteřinu. Nevýhoda se projevila při vysokých frekvencích kmitání vibrační třídičky, kdy kamera nebyla schopna zaznamenat body ostře, tedy body na záznamu byly rozmazané. Tento problém se projevil při zpracování záznamu, kdy algoritmus pro vyhledávání kruhů v obraze, nebyl schopen tyto kruhy nalézt, právě z důvodu rozmazanosti. Proto byla zvolena kvalitnější kamera, která byla schopna záznamu ve vysokém rozlišení a také 50 snímků za vteřinu. Obraz byl již ostrý v celém rozsahu měření viz obr.: Funkce pro vyhledávání kruhů Software Matlab disponuje tzv. Image processing Toolbox, kde se dá nalézt funkce na nalezení kruhů ve snímku. Tato funkce se nazývá imfindcircles. Například pro vyhledání kruhů v obrázku 4. Obr. 4: Náhodně rozprostřené kruhové objekty [1] Obr. 3: Obraz při maximální frekvenci kmitání 3.2. Zpracování videa pomocí softwaru Matlab Jako první je třeba do Matlabu pořízené video nahrát, k tomu slouží funkce Videoreader('název videa'). Tato funkce načte pořízené video. Záznam má délku 311 sekund a každá sekunda má 50 snímků. Celkem má záznam snímků. Záznam byl rozdělen na celkem 5 měření, kdy každé z těchto měření má přibližně 8-14 sekund a jiné otáčky elektromotoru. Začalo se od nejnižších otáček až po maximální. Pro potřeby Matlabu se záznam musel rozdělit na jednotlivé snímky. K tomu slouží v Matlabu funkce (read), jejíž použití je následující: V= Videoreader('název videa') For k=1500:1900 Singleframe=read(V,k) End Tímto cyklem, který zde začíná na 1500 snímku, čemuž odpovídá 30 vteřina a končí 1900 snímkem (38 vteřina) se vygeneruje matice nazvaná singleframe o rozměrech 720x1280x3. Jedná se o trojdimenzionální matici, kde 720x1280 odpovídá rozlišení nahrávaného obrazu a číslo tři odpovídá dimenzi pro trojici barev: červená, zelená, modrá. Díky tomu má každý pixel jasně definované umístění a barvu na snímku. Takto vygenerovaná proměnná singleframe zobrazuje vždy hodnotu aktuálního snímku v cyklu, proto je třeba do cyklu vnořit funkci na vyhledávání kruhů. Tento obrázek je vhodný pro ukázku, jak tato funkce funguje. Funkce Imfindcircles má svá jistá omezení, které je třeba pro úspěšnou funkci respektovat. Prvním omezením je, že algoritmus vyhledává kruhové objekty jen v určitém rozmezí velikosti poloměru. Je proto vhodné mít všechny kruhové objekty, které jsou třeba vyhledat o stejném poloměru. Další problém je patrný z obrázku 5. Obr. 5: Náhodné kruhové objekty v černo-bílé barvě Na obrázku 5 je patrné, že některá kolečka jsou světlejší než ostatní, a proto je třeba algoritmu zadat, zda má vyhledávat tmavé nebo světlé objekty. Dalším možným omezením je senzitivita, proto se může stát, že po spuštění funkce by algoritmus nic nenašel. Proto je vhodné citlivost volit 0,94 0,98. Funkce se dá do Matlabu zapsat takto: [centers, radii] = imfindcircles(singleframe,[20 25], 'ObjectPolarity', 'dark', 'Sensitivity', 0,95, 'Method', 'twostage'); Kde centers je matice středů v obrázku o velikosti 22x2 a radii je matice poloměrů o rozměru 22x1. Výsledek viz obrázek 6.
3 Obr. 6: Výsledek detekce kruhů Jak je z obrázku 6 vidět, tak kromě 4 světlých kruhových objektů, byly nalezeny všechny. Díky pochopení funkce imfindcircles bylo rozhodnuto volit bílý papír a na něj umístit 4 kruhové body tmavé barvy pro bezproblémovou detekci kruhů, viz obr.: 1. Výsledek vyhodnocení jednoho snímku je zobrazeno na obrázku 7. Obr. 9: Výsledek z Matlabu Při porovnání obrázků 8 a 9 je na první pohled vidět, že díky opačným počátkům nejsou oba obrázky stejné, a právě z těchto důvodů je třeba umístit počátek do levého dolního okraje na obrázku 8. Postupů pro otočení počátku je zcela určitě mnoho, v této práci je prezentován tento postup: Po nalezení středů kruhů je k dispozici matice 4x2 pro jeden snímek. Druhý sloupec je sloupcem určující polohu středu bodu v ose y. Tento sloupec se převede na záporný, po převodu se tyto body zobrazí v záporné části grafu jako y(1). viz obrázek 10. Obr. 7: Výsledek detekce kruhů jednoho snímku Tabulka 1. Polohy středů kruhů z obrázku 7 x [pixel] y [pixel] Bod 1 354, ,085 Bod 2 761, ,120 Bod 3 360, ,127 Bod 4 770, ,469 Jak je patrné z tabulky 1, tak i z umístění počátku na obrázku 7, kde tento počátek je umístěn v levém horním rohu. Takto umístěný počátek je nevhodný pro výsledné vykreslení grafů, kde je počátek umístěn pro změnu v levém dolním rohu. Tento fakt způsobil, že při vykreslení polohy bodu se vykreslované body zobrazily opačně, než jak byla reálná poloha. Viz obr.: 8 a 9. Obr. 10: Zobrazení změny počátku pro středy bodů Bod [ y(1)] se nachází v záporné části grafu. Součtem bodu [ y(1)] s počtem pixelů na výšku snímku se bod dostane do bodu [y (1)] a tím se tento bod zobrazí tam, kde má podle reálného snímku být viz obrázek 11. Obr. 8: Reálný sklon bodů Obr. 11: Zobrazení bodu po korekci identické s obr. 8


=centers(1,1), kde k značí: k-tý snímek v cyklu.")
 y (1) x (2) y (2) ) (1) Jelikož funkce imfindcircles by mohla náhodně najít střed i druhého bodu jako první, tak by v každém cyklu mohlo být x1 jiná vzdálenost, proto je")
4 3.4. Vykreslení bodů Pro jednoduchost bylo rozhodnuto využít pouze dva horní body a to konkrétně bod 1 a 2 z obrázku 7. Pro zobrazení kmitání soustavy bude stačit vyhodnotit pouze jeden bod, ale pro vykreslení úhlu φ jsou za potřebí body dva. Aby program mohl vyhodnocovat pouze dva body, bylo třeba snímky oříznout na velikost takovou, kde budou vidět pouze dva body. Je účelné oříznout oblast větší, než kterou zabírají body, aby při kmitání body nezmizely ze snímku, viz obr. 12. Na obrázku 13 je schematicky znázorněno a v rovnicích 2,3,4 je dopočten úhel φ. Tímto způsobem se v každém cyklu spočítá úhel, který je potřebný pro vykreslení grafu. Ve chvíli, kdy je skript spočten, je třeba vykreslit grafy, pomocí funkce plot. 4. Výsledky Obr. 12: Oříznutý obrázek Na obrázku 12 jsou viditelné právě 2 body, které funkce imfindcircles najde. Polohy středů x a y se zapíší do proměnné x1(:,k)=centers(1,1), kde k značí: k-tý snímek v cyklu. Jelikož jsou hledány dva body, tak matice Centers má rozměr 2x2 a vypadá takto: Obr. 14: Měření č.: 1 kmitání v ose x ( x (1) y (1) x (2) y (2) ) (1) Jelikož funkce imfindcircles by mohla náhodně najít střed i druhého bodu jako první, tak by v každém cyklu mohlo být x1 jiná vzdálenost, proto je nutné souřadnice středů seřadit. K tomu poslouží jednoduchá podmínka if. Jak je totiž z obrázku 12 patrné, tak souřadnice x1 nemůže nabývat hodnot větších než 100 pixelů, jelikož souřadnice levého bodu je 45 pixelů a pohyb levého bodu na obrázku 12 je okolo pixelů. Díky této podmínce se bude do proměnné x1 vždy ukládat x-ová vzdálenost levého bodu. Obr. 15: Měření č.: 1 kmitání v ose y Obr. 13: Schématické znázornění výpočtu úhlu φ Výpočet úhlu vychází z geometrie. Dx = x 2 x 1 (2) Dy = y 2 y 1 (3) φ = arctg ( Dy Dx ) (4) Obr. 16: Měření č.: 1 úhel φ
5
6 5. Závěr Úkolem tohoto příspěvku bylo vyhodnocení kmitání vibrační třídičky olejnatých semen, pomocí experimentální optické metody. V tomto případě byla měřičem digitální zrcadlovka Canon EOS6D s objektivem Canon EF-50 mm/f1.4 s 50 snímky za vteřinu. Tato kamera poskytla dostatečně kvalitní záznam, který byl vyhodnocen prostřednictvím softwaru Matlab, ve kterém byl napsán skript pro vyhodnocení kmitání vibrační třídičky. Výsledky ve formě grafů poslouží k porovnání s metodou analytickou. Analytickou metodu sepsal Bc. Oskar Turek a jeho příspěvek je s tímto příspěvkem propojen. Výsledky této práce by měly být jakýmsi etalonem k výsledkům z analytické metody. Vzhledem k rozumným průběhům grafů a jejich hodnot, lze konstatovat, že správnost těchto výsledků, lze považovat za relevantní. Pro přehlednost práce jsou prezentovány pouze dvě sady měření tj. měření č.: 1 a č.: 3. Ostatní měření jsou si podobná a není již účelné je v této práci prezentovat. Poděkování Chtěl bych poděkovat panu Ing. Janu Hoidekrovi za pomoc při práci s MATLABEM a za celkovou pomoc při řešení této práce. Zdroje: [1]
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických
 Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Měření průtoku kapaliny s využitím digitální kamery
 Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
K OZA SE PASE NA POLOVINĚ ZAHRADY Zadání úlohy
 Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni. Abstrakt
 VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Snižování hlukové emise moderní automobilové převodovky. Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka
 Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
5. Pro jednu pružinu změřte závislost stupně vazby na vzdálenosti zavěšení pružiny od uložení
 1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Středoškolská technika SCI-Lab
 Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
BPC2E_C08 Parametrické 3D grafy v Matlabu
 BPC2E_C08 Parametrické 3D grafy v Matlabu Cílem cvičení je procvičit si práci se soubory a parametrickými 3D grafy v Matlabu. Úloha A. Protože budete řešit transformaci z kartézských do sférických souřadnic,
BPC2E_C08 Parametrické 3D grafy v Matlabu Cílem cvičení je procvičit si práci se soubory a parametrickými 3D grafy v Matlabu. Úloha A. Protože budete řešit transformaci z kartézských do sférických souřadnic,
VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ
 VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ Markéta Mazálková Katedra komunikačních a informačních systémů Fakulta vojenských technologií,
VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ Markéta Mazálková Katedra komunikačních a informačních systémů Fakulta vojenských technologií,
Metoda Monte Carlo a její aplikace v problematice oceňování technologií. Manuál k programu
 Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Výpočet excentrického klikového mechanismu v systému MAPLE 11 Tomáš Svoboda Technická fakulta Česká Zemědělská Univerzita
 Výpočet excentrického klikového mechanismu v systému MAPLE 11 Tomáš Svoboda Technická fakulta Česká Zemědělská Univerzita ročník:2 studijní skupina:2 Page 1 Excentrický klikový mechanismus je zadán parametry
Výpočet excentrického klikového mechanismu v systému MAPLE 11 Tomáš Svoboda Technická fakulta Česká Zemědělská Univerzita ročník:2 studijní skupina:2 Page 1 Excentrický klikový mechanismus je zadán parametry
7 Transformace 2D. 7.1 Transformace objektů obecně. Studijní cíl. Doba nutná k nastudování. Průvodce studiem
 7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
11 Zobrazování objektů 3D grafiky
 11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
Zadání soutěžních úloh
 16. až 18. dubna 2015 Krajské kolo 2014/2015 Úlohy můžete řešit v libovolném pořadí a samozřejmě je nemusíte vyřešit všechny. Za každou úlohu můžete dostat maximálně 10 bodů, z nichž je většinou 9 bodů
16. až 18. dubna 2015 Krajské kolo 2014/2015 Úlohy můžete řešit v libovolném pořadí a samozřejmě je nemusíte vyřešit všechny. Za každou úlohu můžete dostat maximálně 10 bodů, z nichž je většinou 9 bodů
Teorie náhodných matic aneb tak trochu jiná statistika
 Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
Maticová optika. Lenka Přibylová. 24. října 2010
 Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Experimentální realizace Buquoyovy úlohy
 Experimentální realizace Buquoyovy úlohy ČENĚK KODEJŠKA, JAN ŘÍHA Přírodovědecká fakulta Univerzity Palackého, Olomouc Abstrakt Tato práce se zabývá experimentální realizací Buquoyovy úlohy. Jedná se o
Experimentální realizace Buquoyovy úlohy ČENĚK KODEJŠKA, JAN ŘÍHA Přírodovědecká fakulta Univerzity Palackého, Olomouc Abstrakt Tato práce se zabývá experimentální realizací Buquoyovy úlohy. Jedná se o
Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na. x 2 x 1
 Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
Měření tíhového zrychlení matematickým a reverzním kyvadlem
 Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ
 Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ Ing. Michal Švantner, Ph.D. Doc. Ing. Milan Honner, Ph.D. 1/10 Anotace Popisuje se software,
Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ Ing. Michal Švantner, Ph.D. Doc. Ing. Milan Honner, Ph.D. 1/10 Anotace Popisuje se software,
1 Základní funkce pro zpracování obrazových dat
 1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
Hisab al-džebr val-muqabala ( Věda o redukci a vzájemném rušení ) Muhammada ibn Músá al-chvárizmího (790? - 850?, Chiva, Bagdád),
 Muhammada ibn Músá al-chvárizmího (790? - 850?, Chiva, Bagdád),") 1 LINEÁRNÍ ALGEBRA 1 Lineární algebra Slovo ALGEBRA pochází z arabského al-jabr, což znamená nahrazení. Toto slovo se objevilo v názvu knihy islámského matematika Hisab al-džebr val-muqabala ( Věda o redukci
1 LINEÁRNÍ ALGEBRA 1 Lineární algebra Slovo ALGEBRA pochází z arabského al-jabr, což znamená nahrazení. Toto slovo se objevilo v názvu knihy islámského matematika Hisab al-džebr val-muqabala ( Věda o redukci
Rozvinutí funkce do Maclaurinova rozvoje
 Rozvinutí funkce do Maclaurinova rozvoje 1.1 Úvod Na přednáškách z matematické analýzy mě zaujala teorie o mocninných řadách a rozvojích, kde jsem zjistil, že každá vhodná funkce lze rozvinout do nekonečné
Rozvinutí funkce do Maclaurinova rozvoje 1.1 Úvod Na přednáškách z matematické analýzy mě zaujala teorie o mocninných řadách a rozvojích, kde jsem zjistil, že každá vhodná funkce lze rozvinout do nekonečné
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Uživatelská příručka.!instalace!průvodce.!dialogová okna!program zevnitř
 Uživatelská příručka!instalace!průvodce!použití!dialogová okna!program zevnitř KAPITOLA 1: INSTALACE PROGRAMU Svitek...4 HARDWAROVÉ POŽADAVKY...4 SOFTWAROVÉ POŽADAVKY...4 INSTALACE PROGRAMU Svitek NA VÁŠ
Uživatelská příručka!instalace!průvodce!použití!dialogová okna!program zevnitř KAPITOLA 1: INSTALACE PROGRAMU Svitek...4 HARDWAROVÉ POŽADAVKY...4 SOFTWAROVÉ POŽADAVKY...4 INSTALACE PROGRAMU Svitek NA VÁŠ
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 2/2: Měření pohybu pomocí kamery (část 2) Ing. Patrik Kutílek, Ph.D., Ing. Adam Žižka (kutilek@fbmi.cvut.cz, zizka@fbmi.cvut.cz)
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 2/2: Měření pohybu pomocí kamery (část 2) Ing. Patrik Kutílek, Ph.D., Ing. Adam Žižka (kutilek@fbmi.cvut.cz, zizka@fbmi.cvut.cz)
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
P Ř Í K L A D Č. 5 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S VÝRAZNĚ ROZDÍLNÝM ROZPĚTÍM NÁSLEDUJÍCÍCH POLÍ
 P Ř Í K L A D Č. 5 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S VÝRAZNĚ ROZDÍLNÝ ROZPĚTÍ NÁSLEDUJÍCÍCH POLÍ Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský
P Ř Í K L A D Č. 5 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S VÝRAZNĚ ROZDÍLNÝ ROZPĚTÍ NÁSLEDUJÍCÍCH POLÍ Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský
Ing. Jakub Ulmann. Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově
 Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 07_10_Zobrazování optickými soustavami 3 Ing. Jakub Ulmann Digitální fotoaparát Jak digitální fotoaparáty
Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 07_10_Zobrazování optickými soustavami 3 Ing. Jakub Ulmann Digitální fotoaparát Jak digitální fotoaparáty
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
Algoritmus pro hledání nejkratší cesty orientovaným grafem
 1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
Matice přechodu. Pozorování 2. Základní úkol: Určete matici přechodu od báze M k bázi N. Každou bázi napíšeme do sloupců matice, např.
 Matice přechodu Základní úkol: Určete matici přechodu od báze M k bázi N. Každou bázi napíšeme do sloupců matice, např. u příkladu 7 (v ) dostaneme: Nyní bychom mohli postupovat jako u matice homomorfismu
Matice přechodu Základní úkol: Určete matici přechodu od báze M k bázi N. Každou bázi napíšeme do sloupců matice, např. u příkladu 7 (v ) dostaneme: Nyní bychom mohli postupovat jako u matice homomorfismu
Fyzikální laboratoř. Kamil Mudruňka. Gymnázium, Pardubice, Dašická /8
 Středoškolská technika 2015 Setkání a prezentace prací středoškolských studentů na ČVUT Fyzikální laboratoř Kamil Mudruňka Gymnázium, Pardubice, Dašická 1083 1/8 O projektu Cílem projektu bylo vytvořit
Středoškolská technika 2015 Setkání a prezentace prací středoškolských studentů na ČVUT Fyzikální laboratoř Kamil Mudruňka Gymnázium, Pardubice, Dašická 1083 1/8 O projektu Cílem projektu bylo vytvořit
Vytvoření a úpravy geologického modelu
 Inženýrský manuál č. 39 Aktualizace 11/2018 Vytvoření a úpravy geologického modelu Program: Stratigrafie Soubor: Demo_manual_39.gsg Úvod Cílem tohoto inženýrského manuálu je vysvětlit základní práci s
Inženýrský manuál č. 39 Aktualizace 11/2018 Vytvoření a úpravy geologického modelu Program: Stratigrafie Soubor: Demo_manual_39.gsg Úvod Cílem tohoto inženýrského manuálu je vysvětlit základní práci s
CVIČNÝ TEST 24. OBSAH I. Cvičný test 2. Mgr. Kateřina Nováková. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
CVIČNÝ TEST 24 Mgr. Kateřina Nováková OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Písemnou práci z chemie psalo všech 28 žáků ze
Výukové texty. pro předmět. Měřící technika (KKS/MT) na téma. Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti
 na téma. Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
ENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU
 P Ř Í K L A D Č. 4 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský kolektiv : Ing. Martin
P Ř Í K L A D Č. 4 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský kolektiv : Ing. Martin
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
PRAKTIKUM III. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Úlohač.III. Název: Mřížkový spektrometr
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úlohač.III Název: Mřížkový spektrometr Vypracoval: Petr Škoda Stud. skup.: F14 Dne: 17.4.2006 Odevzdaldne: Hodnocení:
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úlohač.III Název: Mřížkový spektrometr Vypracoval: Petr Škoda Stud. skup.: F14 Dne: 17.4.2006 Odevzdaldne: Hodnocení:
Posouzení mikropilotového základu
 Inženýrský manuál č. 36 Aktualizace 06/2017 Posouzení mikropilotového základu Program: Soubor: Skupina pilot Demo_manual_36.gsp Cílem tohoto inženýrského manuálu je vysvětlit použití programu GEO5 SKUPINA
Inženýrský manuál č. 36 Aktualizace 06/2017 Posouzení mikropilotového základu Program: Soubor: Skupina pilot Demo_manual_36.gsp Cílem tohoto inženýrského manuálu je vysvětlit použití programu GEO5 SKUPINA
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
EXPERIMENTÁLNÍ A SIMULAČNÍ SADA ÚLOH Z FOTONIKY
 EXPERIMENTÁLNÍ A SIMULAČNÍ SADA ÚLOH Z FOTONIKY Martin Řeřábek, Petr Páta ČVUT, Fakulta elektrotechnická, katedra Radioelektroniky Abstrakt V rámci přípravy nového předmětu Obrazová otonika byla vytvořena
EXPERIMENTÁLNÍ A SIMULAČNÍ SADA ÚLOH Z FOTONIKY Martin Řeřábek, Petr Páta ČVUT, Fakulta elektrotechnická, katedra Radioelektroniky Abstrakt V rámci přípravy nového předmětu Obrazová otonika byla vytvořena
Popis softwaru pro sledování pohybu UZ sondy
 Popis softwaru pro sledování pohybu UZ sondy Cílem programu je umožnit lékaři, provádějícímu ultrazvukové vyšetření pacientky, zaznamenat a vyhodnotit prostorovou trajektorii sondy. Zaznamenaná trajektorie
Popis softwaru pro sledování pohybu UZ sondy Cílem programu je umožnit lékaři, provádějícímu ultrazvukové vyšetření pacientky, zaznamenat a vyhodnotit prostorovou trajektorii sondy. Zaznamenaná trajektorie
Úterý 8. ledna. Cabri program na rýsování. Základní rozmístění sad nástrojů na panelu nástrojů
 Úterý 8. ledna Cabri program na rýsování program umožňuje rýsování základních geometrických útvarů, měření délky úsečky, velikosti úhlu, výpočet obvodů a obsahů. Je vhodný pro rýsování geometrických míst
Úterý 8. ledna Cabri program na rýsování program umožňuje rýsování základních geometrických útvarů, měření délky úsečky, velikosti úhlu, výpočet obvodů a obsahů. Je vhodný pro rýsování geometrických míst
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Měření momentu setrvačnosti prstence dynamickou metodou
 Měření momentu setrvačnosti prstence dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=13 Tato úloha patří zejména svým teoretickým základem k nejobtížnějším. Pojem momentu setrvačnosti dělá
Měření momentu setrvačnosti prstence dynamickou metodou Online: http://www.sclpx.eu/lab1r.php?exp=13 Tato úloha patří zejména svým teoretickým základem k nejobtížnějším. Pojem momentu setrvačnosti dělá
Řízení modelu letadla pomocí PLC Mitsubishi
 Řízení modelu letadla pomocí PLC Mitsubishi Jakub Nosek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení modelu letadla pomocí PLC Mitsubishi Jakub Nosek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
METODICKÝ LIST 1. Název výukové aktivity (tématu): 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:
: 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:") METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
Funkce komplexní proměnné a integrální transformace
 Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM
 Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
SYSTÉM ZPRACOVÁNÍ DAT FOTOVOLTAICKÉHO SYSTÉMU A METEOSTANICE
 Středoškolská technika 2011 Setkání a prezentace prací středoškolských studentů na ČVUT SYSTÉM ZPRACOVÁNÍ DAT FOTOVOLTAICKÉHO SYSTÉMU A METEOSTANICE Petr Zelenka VOŠ a SŠ Varnsdorf, p.o. středisko VOŠ
Středoškolská technika 2011 Setkání a prezentace prací středoškolských studentů na ČVUT SYSTÉM ZPRACOVÁNÍ DAT FOTOVOLTAICKÉHO SYSTÉMU A METEOSTANICE Petr Zelenka VOŠ a SŠ Varnsdorf, p.o. středisko VOŠ
Kreslení elipsy Andrej Podzimek 22. prosince 2005
 Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti.
 U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
OHYB (Napjatost) M A M + qc a + b + c ) M A = 2M qc a + b + c )
 M A M + qc a + b + c ) M A = 2M qc a + b + c )") 3.3 Řešené příklady Příklad 1: Pro nosník na obrázku vyšetřete a zakreslete reakce, T (x) a M(x). Dále určete M max a proveďte dimenzování pro zadaný průřez. Dáno: a = 0.5 m, b = 0.3 m, c = 0.4 m, d =
3.3 Řešené příklady Příklad 1: Pro nosník na obrázku vyšetřete a zakreslete reakce, T (x) a M(x). Dále určete M max a proveďte dimenzování pro zadaný průřez. Dáno: a = 0.5 m, b = 0.3 m, c = 0.4 m, d =
Harmonické oscilátory
 Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
VLIV OKRAJOVÝCH PODMÍNEK NA VÝSLEDEK ZKOUŠKY TEPELNÉHO VÝKONU SOLÁRNÍHO KOLEKTORU
 Energeticky efektivní budovy 2015 sympozium Společnosti pro techniku prostředí 15. října 2015, Buštěhrad VLIV OKRAJOVÝCH PODMÍNEK NA VÝSLEDEK ZKOUŠKY TEPELNÉHO VÝKONU SOLÁRNÍHO KOLEKTORU Bořivoj Šourek,
Energeticky efektivní budovy 2015 sympozium Společnosti pro techniku prostředí 15. října 2015, Buštěhrad VLIV OKRAJOVÝCH PODMÍNEK NA VÝSLEDEK ZKOUŠKY TEPELNÉHO VÝKONU SOLÁRNÍHO KOLEKTORU Bořivoj Šourek,
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
i=1 Přímka a úsečka. Body, které leží na přímce procházející body a a b můžeme zapsat pomocí parametrické rovnice
 I. Funkce dvou a více reálných proměnných 1. Úvod Značení: V textu budeme používat označení: N pro množinu všech přirozených čísel; R pro množinu všech reálných čísel; R n pro množinu všech uspořádaných
I. Funkce dvou a více reálných proměnných 1. Úvod Značení: V textu budeme používat označení: N pro množinu všech přirozených čísel; R pro množinu všech reálných čísel; R n pro množinu všech uspořádaných
CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I
 Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
 3D analýza pohybu 3D optické měřicí technologie pro dynamickou analýzu lisovacích strojů Měřicí systém: PONTOS Klíčová slova: tváření plechů, optimalizace procesů tváření, MFU, analýza vodicích lišt, náklon
3D analýza pohybu 3D optické měřicí technologie pro dynamickou analýzu lisovacích strojů Měřicí systém: PONTOS Klíčová slova: tváření plechů, optimalizace procesů tváření, MFU, analýza vodicích lišt, náklon
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Využití tabulkového procesoru MS Excel
 Semestrální práce Licenční studium Galileo srpen, 2015 Využití tabulkového procesoru MS Excel Ing Marek Bilko Třinecké železárny, a.s. Stránka 1 z 10 OBSAH 1. ÚVOD... 2 2. DATOVÝ SOUBOR... 2 3. APLIKACE...
Semestrální práce Licenční studium Galileo srpen, 2015 Využití tabulkového procesoru MS Excel Ing Marek Bilko Třinecké železárny, a.s. Stránka 1 z 10 OBSAH 1. ÚVOD... 2 2. DATOVÝ SOUBOR... 2 3. APLIKACE...
MANUÁL PRO VÝPOČET ZBYTKOVÉHO
 MANUÁL PRO VÝPOČET ZBYTKOVÉHO PRODLOUŽENÍ VE ŠROUBECH 0 25.05.2016 Doporučení pro výpočet potřebného prodloužení šroubu, aby bylo dosaženo požadovaného předpětí ve šroubech předepínaných hydraulickým napínákem
MANUÁL PRO VÝPOČET ZBYTKOVÉHO PRODLOUŽENÍ VE ŠROUBECH 0 25.05.2016 Doporučení pro výpočet potřebného prodloužení šroubu, aby bylo dosaženo požadovaného předpětí ve šroubech předepínaných hydraulickým napínákem
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY
 TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
BROB Základy robotiky. Ing. František Burian, Ph.D. Jan Macháček VUT ID: Martin Pavelka VUT ID:
 Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Numerické řešení proudění stupněm experimentální vzduchové turbíny a budících sil na lopatky
 Konference ANSYS 2009 Numerické řešení proudění stupněm experimentální vzduchové turbíny a budících sil na lopatky J. Štěch Západočeská univerzita v Plzni, Katedra energetických strojů a zařízení jstech@kke.zcu.cz
Konference ANSYS 2009 Numerické řešení proudění stupněm experimentální vzduchové turbíny a budících sil na lopatky J. Štěch Západočeská univerzita v Plzni, Katedra energetických strojů a zařízení jstech@kke.zcu.cz
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Metoda konečných prvků MKP I (Návody do cvičení)
 Metoda konečných prvků MKP I (Návody do cvičení)") VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Metoda konečných prvků MKP I (Návody do cvičení) Autoři: Martin Fusek, Radim Halama, Jaroslav Rojíček Verze: 0 Ostrava
VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Metoda konečných prvků MKP I (Návody do cvičení) Autoři: Martin Fusek, Radim Halama, Jaroslav Rojíček Verze: 0 Ostrava
Únosnost kompozitních konstrukcí
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
9 Kolmost vektorových podprostorů
 9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
Time-Resolved PIV and LDA Measurements of Pulsating Flow
 Colloquium FLUID DYNAMICS 2007 Institute of Thermomechanics AS CR, v. v. i., Prague, October 24-26, 2007 p.1 MĚŘENÍ PERIODICKÉHO PROUDĚNÍ METODOU TIME-RESOLVED PIV A LDA Time-Resolved PIV and LDA Measurements
Colloquium FLUID DYNAMICS 2007 Institute of Thermomechanics AS CR, v. v. i., Prague, October 24-26, 2007 p.1 MĚŘENÍ PERIODICKÉHO PROUDĚNÍ METODOU TIME-RESOLVED PIV A LDA Time-Resolved PIV and LDA Measurements