Snímače polohy, dráhy a jejich derivací - 1
|
|
|
- Karolína Konečná
- před 6 lety
- Počet zobrazení:
Transkript
1 Verze 2 Snímače polohy, dráhy a jejich derivací - 1 Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR.

2 In-TECH 2, označuje společný projekt Technické univerzity v Liberci a jejích partnerů - Škoda Auto a.s. a Denso Manufacturing Czech s.r.o. Cílem projektu, který je v rámci Operačního programu Vzdělávání pro konkurenceschopnost (OP VK) financován prostřednictvím MŠMT z Evropského sociálního fondu (ESF) a ze státního rozpočtu ČR, je inovace studijního programu ve smyslu progresivních metod řízení inovačního procesu se zaměřením na rozvoj tvůrčího potenciálu studentů. Tento projekt je nutné realizovat zejména proto, že na trhu dochází ke zrychlování inovačního cyklu a zkvalitnění jeho výstupů. ČR nemůže na tyto změny reagovat bez osvojení nejnovějších inženýrských metod v oblasti inovativního a kreativního konstrukčního řešení strojírenských výrobků. Majoritní cílovou skupinou jsou studenti oborů Inovační inženýrství a Konstrukce strojů a zařízení. Cíle budou dosaženy inovací VŠ přednášek a seminářů, vytvořením nových učebních pomůcek a realizací studentských projektů podporovaných experty z partnerských průmyslových podniků. Délka projektu:
 konfigurace kontaktů (přepínací x spínací, společný potenciál x izolované...) funkce kontaktů (mžikové x pomalé) hystereze a spínací dráha typ aktivačního členu (kolečko, kladka.")
3 Snímače polohy: Snímače polohy - s nespojitým výstupním signálem (koncové, mezní indikace dosažení polohy, NE měření) Technické údaje: zatižitelnost kontaktů: (napětí (AC x DC), proud, typ zátěže R x L) konfigurace kontaktů (přepínací x spínací, společný potenciál x izolované...) funkce kontaktů (mžikové x pomalé) hystereze a spínací dráha typ aktivačního členu (kolečko, kladka..) Kontaktní koncové spínače
4 Správné používání koncových spínačů: U koncových spínačů s vrchním stlačovacím čepem musí být operační síla vyvinuta co nejblíže osy čepu. Vačka nebo zarážka musejí být takové, aby se aktivní člen neuvolnil náhle a samovolně nesepnul při zpětném pohybu.

5 Indukčnostní snímač Princip funkce je založen na vzájemném působení mezi vodivým předmětem (snímaná součást) a střídavým elektromagnetickým polem. Hlavní technické parametry: jmenovité napájecí napětí jmenovitý pracovní proud spínací vzdálenost a frekvence hystereze stupeň elektrického krytí typ výstupního obvodu (PNP x NPN, dvoudrát x třídrát)
6 Typy výstupních obvodů (nejen) indukčnostních snímačů: 3-drát, DC spínač 2-drát, DC spínač PNP, spínání plusu (napájení) NPN, spínání minusu (přizemnění) lze přepólovat
7 a mnohé další snímače polohy s nespojitým výstupem: optické ultrazvukové laserové kapacitní s Hallovou sondou
8 Snímače polohy a dráhy se spojitým (kvazispojitým) výstupním signálem: - lineární snímače - rotační snímače Podle výstupního údaje: -absolutní snímače (po výpadku a následném připojení napájení se údaj o poloze neztrácí) -inkrementální snímače (po připojení napájení je nutno nejprve najet do výchozího (vztažného) místa Pod pojmem dráha rozumějme: lineární úsek mezi dvěma koncovými body lineární snímače úhel natočení (hřídele) mezi krajními body rotační snímače
9 Lineární snímače plohy: Odporový (potenciometrický) snímač polohy: Rz R K z činitel zatížení R2 pro lineární R x průběh R dává pak hodnota U Z informaci o vzdálenosti (úhlu natočení) α x?
10 vypočtěme U z : pro R z je U z U 20 R2 x U z U U x R pro 0 1 a 1 x U V pro R řazení U U z z jde rezistorů R 1 R R 2 2 o paralelní a Rz Rz R2 Rz R2 Rz platí :...
11 U z 1 x 1x K z U x V zatížení výstupu potenciometrického snímače se projeví na průběhu statické charakteristiky následovně: Uz U K z R R z Důležitý závěr: vstupní impedance měřidla musí být řádově větší než odpor snímače x
12 není-li dodržen požadavek R z >> R, určí se absolutní chyba výstupního napětí U z podle vztahu: U z U z U x Kz 1x U x V
13 Výhody potenciometrických snímačů polohy: - absolutní v celém rozsahu měření - jednoduchý, tedy levný Nevýhody potenciometrických snímačů polohy: - výstupní signál (napětí) nedává přímou informaci o poloze (vhodný jako zdroj analogového zpětnovazebního signálu) - nízká životnost kontakty - teplotní závislost u vinutých potenciometrů - šum ve výstupním signálu
14 Magnetostrikční snímač polohy: Snímače polohy, dráhy a jejich derivací Magnetostrikční snímač měří bezdotykově polohu pohyblivého permanentního magnetu pomocí doby šíření mechanického vzruchu vybuzeného interakcí mezi magnetickými poli v magnetostrikčním materiálu. Je to snímač absolutní, pasivní. Magnetostrikce je schopnost některých feromagnetických materiálů pod vlivem magnetického pole měnit svoje rozměry (Wiedemannův jev prochází-li dlouhou a tenkou tyčí z feromagnetického materiálu, umístěnou v podélném magnetickém poli, elektrický proud, namáhá se tyč krutem) viz. bzučení transformátorů elektrického napětí Magnetoelastický jev (Villariho jev) se vyznačuje změnou magnetických vlastností (na př. permeability) materiálu feromagnetické tyče, vyvolanou deformací tyče v podélném směru
15 Princip činnosti magnetostrikčního snímače:
16 Popis funkce magnetostrikčního snímače: Měřící element ( vlnovod ) je vyroben ze speciální slitiny niklu a oceli s průměrem vnějším 0,7 mm a vnitřním 0,5 mm. Měděný vodič je vedený vnitřkem této trubičky. Start měření je inicializován krátkým proudovým impulzem v měděném vodiči. Elektrický proud vytváří kolem trubičky kruhové magnetické pole. Permanentní magnet v místě měření je použit jako ukazatel polohy, magnetické siločáry jeho pole jsou kolmé k elektromagnetickému poli vzniklému proudovým impulzem. V místě pod permanentním magnetem se obě magnetická pole protnou a jejich interakcí se v magnetostrikční trubičce vytvoří (v rozsahu mikro) torzní impulz (Wiedemannův jev). Torzní impulz se šíří vlnovodem oběma směry ve formě mechanické vlny. Rychlost jejího šíření vlnovodem je známa (2 830 m/s) a je téměř nezávislá na vlivech okolního prostředí (teplota, rázy, vibrace, znečištění). Část vlny, která dosáhne ke vzdálenému konci vlnovodu, je zatlumena (rušivý odraz), druhá část, směřující k signálovému konvertoru je změněna na elektrický signál impulz - (Villariho jev). Doba přeběhu vlny od místa vzniku ke konvertoru je přímo úměrná vzdálenosti ukazatele (permanentního magnetu) od konvertoru. Naměřený čas pak dovoluje určit vzdálenost dráhu s extrémě vysokou přesností.
17 Uživatelské vlastnosti magnetostrikčního snímače : pracovní rozsah měřené dráhy rozlišení systému opakovatelnost reprodukovatelnost vzorkovací frekvence max. odchylka od linearity napájecí napětí proudový odběr výstupní signál skládáním segmentů až mm (běžně 50 až mm) min 10 μm (od 1 μm bez matematických úprav průměrování), závisí na způsobu vyhodnocení min 10 μm min 20 μm 1 až 10 khz < 200 μm do 500 jmenovité délky typ. ± 0,02 %, max. ± 0,04 % pro 500 až mm jmenovité délky 20 až 28 V DC < 70 ma (podle typu) absolutní
18 LVDT (indukčnostní) snímač polohy (Lineární vysouvací diferenciální transformátor) Transformátor s primárním a dvojitým sekundárním vinutím, jejichž vzájemná indukčnost je ovlivňována změnou vodivosti magnetického obvodu, která je svázána s měřenou veličinou - Absolutní (pasivní) snímač - Bez tření minimální zátěž měřené soustavy - Vysoké rozlišení (omezeno jen šumem) - Vysoká životnost téměř neomezená (žádné mechanické kontakty) - Velká přesnost, linearita 0,1 % - Rozsah jednotky až stovky mm (podle typu) - Při překročení rozsahu nedojde k poškození dutina je průchozí - Verze i pro velmi malá posunutí (mm) - Velmi dobrá dynamická odezva omezeno frekvencí napájení - Poměrně odolné proti znečištění
19 Princip činnosti LVDT snímače polohy: L2 L1 L2
20 a základní matematické vztahy obvodového řešení: : konstanta Časová 1 ) ( : U naprázdno napětí Výstupní ) ( ) ( ) : (j U napětí Sekundární ) ( ) ( ) : (j U napětí Sekundární : proud Primární R L j M M j R j U L j R j U M M j j U j j I M j j U j I M j j U L j R j U j I cc cc cc

21 Příklad uspořádání LVDT (schematicky) a typický průběh statických charakteristik L2 L1 L2

22 Příklad snímače dráhy WA 200 (Hottinger Baldwin Messtechnik) a jeho hlavní technické parametry: jmenovitá měřící dráha: jmenovitý výstupní signál: (při jmenovité dráze a nezatíženém výstupu) jmenovité napájecí napětí a frekvence: 200 mm 80 mv / V 2,5 V ef / 4,8 khz odchylka linearity: 0,2 % maximální dovolené zrychlení: m/s 2 hmotnost tělesa snímače: 130g zásuvné kotvy: 20 g
23 Induktosyn: Lineární (i rotační - resolver) senzor polohy, cyklicky absolutní Nad pravítkem se pohybuje jezdec se dvěma vinutími (posun o l/4), pevně spojený s částí stroje, jejíž polohu měříme Obě vinutí jezdce se napájejí střídavým napětím s fázovým posunem 90 o u t ku sin t a u12t ku cos t 11 Napětí na výstupu pravítka bude: u 2 t u11t u12t kusin t sin cos t cos ku cos t Přiřadíme-li délce kroku K úhel 2π, pak úhel φ je úměrný posuvu jezdce proti pravítku v rámci jednoho kroku x a platí: K x 2
24 x d = K * (x + ¼) d pravítko Pro vztah mezi posuvem jezdce proti pravítku (dráze) a výstupním indukovaným napětím na pravítku (v rámci jednoho kroku K) platí: v bežec u 2 t ku x cost 2 K u (t)=u sin t 11 L u (t)=u cos t 12 pravítko v U 2 výstup
25 Výhody: - vysoká přesnost - velký měřící rozsah (stovky až tisíce mm na délku lože obráběcího stroje) - necitlivost na změnu vzdálenosti a kolmosti pravítka a jezdce - v uzavřeném provedení odolný proti znečištění Nevýhody: - cyklicky absolutní (při začátku měření i po výpadku napájení nutno najet do referenční (nulové) polohy - elektronika musí počítat kroky
26 Rotační snímače polohy: Snímače polohy, dráhy a jejich derivací Rotační inkrementální snímač polohy (IRC Incremental rotary encoder): je elektromechanický převodník cyklicky absolutní rotační snímač polohy úhlu natočení rotoru vůči statoru. Z principu činnosti si inkrementální snímače, na rozdíl od snímačů absolutních, nepamatují polohu při vypnutí napájení.

27 Princip činnosti rotačního inkrementálního snímače:
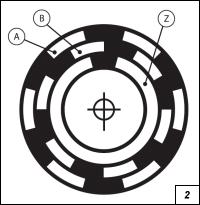
 (π /2). Popsaným způsobem tedy lze získat dva obdélníkové signály posunuté o polovinu periody: kanál A a kanál B (obr.")
28 Základem snímače je otočný optický disk, mechanicky spojený s připojovací hřídelí snímače (obr. 1). Pro rozlišení směru otáčení jsou na pevné části dvě soustavy clonek, vzájemně posunuté o 90 o (el.) (π /2). Popsaným způsobem tedy lze získat dva obdélníkové signály posunuté o polovinu periody: kanál A a kanál B (obr. 3) DŮLEŽITÁ POZNÁMKA: všimněte si, že posunutí snímačů obou kanálů (A a B) je 90 o el. (π/2), NIKOLI 180 o el., jak by se na první pohled zdálo. PROČ?


29 Pro zlepšení kvality a stability výstupních signálů se snímá vždy v diferenčním režimu, kdy se porovnávají dva totožné signály s opačnou fází (fázový rozdíl je 180 o el.). Diferenční způsob snímání umožňuje eliminovat vliv rušení. I 3 I 1 I 2
30 Pro získání většího rozlišení se používá vícenásobného vyhodnocení signálu. Například má-li snímač 100 pulzů/ot. (běžný počet bývá až pulzů/ot., ale i více) pak při čtyřnásobném vyhodnocení signálu (obě náběžné i sestupné hrany kanálů A a B) je rozlišení 400 inkrementů (kroků) /ot.
31 Vedle inkrementálních snímačů polohy se používají i absolutní rotační snímače polohy (ARC), které si naměřenou polohu pamatují i po vypnutí napájení: optický disk absolutního snímače je kódový (na př. s Grayovým kódem), každé poloze natočení disku odpovídá definované výstupní slovo složené z bitů vyslaných LED snímači. Každé následující slovo se liši od předcházejícího právě o jeden bit (možnost opravy při chybě čtení)

32 Příklad hlavních technických údajů snímače IRC 305, (český výrobce LARM Netolice) Otáčky: min -1 Úhlové zrychlení: rad.s -2 Moment setrvačnosti mechanických částí: 20 g.cm -2 Počet impulzů na otáčku: 100 až s jedním nulovým impulzem na otáčku a další elektrické i konstrukční údaje (viz. katalogové listy výrobce)

33 Resolver: je cyklicky absolutní rotační snímač polohy úhlu natočení rotoru vůči statoru (změny polohy proti zvolenému - referenčnímu bodu). Resolver je elektrický stroj, který má jedno vinutí na rotoru a dvě vinutí na statoru. Statorová vinutí jsou vzájemně prostorově pootočena o 90 o el. Rotorové vinutí je napájeno ze zdroje sinusového napětí s frekvencí cca 2 khz. Se změnou úhlu natočení rotoru vůči statoru se sinusově mění i velikost napětí indukovaných z rotoru do obou statorových vinutí. Resolver může být napájen do rotoru nebo statoru.
34 Budící napětí indukované do rotoru: u t U sin t Napětí indukované ve statorových vinutích: u u sin cos t t ku sin t sin ku sin t cos kde: k = transformační poměr (rotor stator) φ = úhel natočení rotoru vůči statoru
35 POZNÁMKA: při napájení do statoru musí být k dispozici dvě sinusová napájecí napětí: u u sin cos t t U sin t U cos t napětí indukované v rotoru je pak: u t ku sin t
36 Teoreticky dosažitelná rozlišitelnost (přesnost) měření vyplývá z úvahy: je-li frekvence napájecího napětí 2 khz a resolver je dvoupólový (360 o geometrických = 360 o el.), je počet vzorků za otáčku 360 o / = 0,18 o, tedy asi 11 úhlových minut
37 Technické údaje: jako příklad je uveden katalogový list resolverů českého výrobce Atas Náchod
Analogově číslicové převodníky
 Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Verze 1 Analogově číslicové převodníky Doplněná inovovaná přednáška Zpracoval: Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Základy tvorby výpočtového modelu
 Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
R 0 = R 1 + R 2. V současnosti je R Z >> R 0, dělič se počítá naprázdno R 1. U 1 R 2 R Z U 2 Přenos:
 Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
Poloha a vzdálenosti (délky, úhly) Dělení snímačů dle signálu: - analogové změna odporu, indukčnosti, kapacity, napětí aj. - číslicové poloha vyjádřena digitálním číslem (diskrétní, dvojhodnotové) Dle
Teorie bezkontaktního měření rozměrů
 Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
AVS / EPS. Pracovní verze část 3. Ing. Radomír Mendřický, Ph.D.
 AVS / EPS Pracovní verze část 3 Ing. Radomír Mendřický, Ph.D. AVS / EPS Odměřovací zařízení - Zpětnovazební prvky a čidla Odměřovací systémy Přímé a nepřímé odměřování Odměřování přírůstkové, cyklicky
AVS / EPS Pracovní verze část 3 Ing. Radomír Mendřický, Ph.D. AVS / EPS Odměřovací zařízení - Zpětnovazební prvky a čidla Odměřovací systémy Přímé a nepřímé odměřování Odměřování přírůstkové, cyklicky
Lineární snímače polohy Temposonics GB-M / GB-T
 MTS Sensors Group Lineární snímače polohy Temposonics GB-M / GB-T s analogovým výstupem Výměnné čidlo s elektronikou Kompaktní a plochý kryt elektroniky Otočný výstupní konektor Magnetostrikční princip
MTS Sensors Group Lineární snímače polohy Temposonics GB-M / GB-T s analogovým výstupem Výměnné čidlo s elektronikou Kompaktní a plochý kryt elektroniky Otočný výstupní konektor Magnetostrikční princip
Lineární snímač polohy Temposonics EP EL
 MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s IO-Link výstupem Pro standardní aplikace Provozní teplota až +75 C Ideální pro montáž do prostorů, kde je málo místa Magnetostrikční
MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s IO-Link výstupem Pro standardní aplikace Provozní teplota až +75 C Ideální pro montáž do prostorů, kde je málo místa Magnetostrikční
Indukční snímač otáček IO-Link Ri360P0-QR24M0-ELiUPN8X4-H1151
 necitlivost vůči rušivým elektromagnetickým polím měřicí rozsah lze nastavit rozlišení 16 bitů všechny parametry nastavitelné pomocí /PACTware nastavitelné proudové a napěťové funkce výstupu výstup nastavitelný
necitlivost vůči rušivým elektromagnetickým polím měřicí rozsah lze nastavit rozlišení 16 bitů všechny parametry nastavitelné pomocí /PACTware nastavitelné proudové a napěťové funkce výstupu výstup nastavitelný
Indukční úhlový senzor s analogovým výstupem RI360P1-QR14-ELIU5X2
 kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím rozlišení 12 bitů 4drát, 15 30 VDC analogový
kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím rozlišení 12 bitů 4drát, 15 30 VDC analogový
7. MĚŘENÍ LINEÁRNÍHO POSUVU
 7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
Indukční lineární senzor LI700P0-Q25LM0-HESG25X3-H1181
 kvádr, hliník / plast různé způsoby montáže zbrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím velice krátká mrtvá zóna rozlišení 0,001 mm 15 30 VDC konektor M12 x 1,
kvádr, hliník / plast různé způsoby montáže zbrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím velice krátká mrtvá zóna rozlišení 0,001 mm 15 30 VDC konektor M12 x 1,
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ Odměřovací zařízení
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Odměřovací zařízení Odměřovací zařízení podávají informace o poloze nástroje vůči obrobku a o odjeté dráze.
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Odměřovací zařízení Odměřovací zařízení podávají informace o poloze nástroje vůči obrobku a o odjeté dráze.
Lineární snímač polohy Temposonics EP EL
 MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s analogovým nebo Start/Stop výstupem Lineární, absolutní měření polohy Bezkontaktní princip měření Robustní průmyslový snímač Testy EMC
MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s analogovým nebo Start/Stop výstupem Lineární, absolutní měření polohy Bezkontaktní princip měření Robustní průmyslový snímač Testy EMC
Výukové texty pro předmět Měřící technika (KKS/MT) na téma
 na téma") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady a tvorba grafické vizualizace k principu měření vzdálenosti u technických zařízení Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady a
Laboratorní úloha č. 2 Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon. Max Šauer
 Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Lineární snímač polohy Temposonics EP EL
 MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s SSI výstupem Lineární, absolutní měření polohy Bezkontaktní princip měření Robustní průmyslový snímač Testy EMC a certifikát CE Linearita
MTS Sensors Group Lineární snímač polohy Temposonics EP EL E serie s SSI výstupem Lineární, absolutní měření polohy Bezkontaktní princip měření Robustní průmyslový snímač Testy EMC a certifikát CE Linearita
Magnetický ovládací lineární senzor WIM100-Q25L-LIU5X2-H1141
 kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 4drát, 15 30 VDC Analogový výstup 0 10 V a 4 20 ma konektor
kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 4drát, 15 30 VDC Analogový výstup 0 10 V a 4 20 ma konektor
Snímače a akční členy zážehových motorů
 Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Učební texty Diagnostika snímače 2.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 29.10.2012 Druhy snímačů: Název zpracovaného celku: Učební texty Diagnostika snímače 2. Pohon snímač tlaku ( převodovka, vstřikování ), snímač hmotnosti
7. MĚŘENÍ LINEÁRNÍHO POSUVU
 7. MĚŘENÍ LINEÁRNÍHO POSUVU Úvod: Pro měření posuvu (změny polohy v daném směru) se používá řada senzorů pracujících na různých principech. Výběr vhodného typu závisí na jejich vlastnostech. 1. Potenciometrické
7. MĚŘENÍ LINEÁRNÍHO POSUVU Úvod: Pro měření posuvu (změny polohy v daném směru) se používá řada senzorů pracujících na různých principech. Výběr vhodného typu závisí na jejich vlastnostech. 1. Potenciometrické
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu odměřovacích systémů (přírůstkový, absolutní) Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu odměřovacích systémů (přírůstkový, absolutní) Autor: Doc. Ing. Josef Formánek, Ph.D.
Automatizační technika Měření č. 6- Analogové snímače
 Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Měření neelektrických veličin. Fakulta strojního inženýrství VUT v Brně Ústav konstruování
 Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Indukční úhlový senzor s analogovým výstupem Ri360P1-QR14-ELiU5X2-0,3-RS5
 kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím rozlišení 12 bitů 4drát, 15 30 VDC analogový
kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím rozlišení 12 bitů 4drát, 15 30 VDC analogový
Lineární snímač polohy Temposonics GB
 MTS Sensors Group Lineární snímač polohy Temposonics GB s analogovým výstupem Robustní tyčový snímač s vysokou odolností vůči tlaku Kompaktní kryt s nízkou hlavou ideální pro instalaci do ventilů Provozní
MTS Sensors Group Lineární snímač polohy Temposonics GB s analogovým výstupem Robustní tyčový snímač s vysokou odolností vůči tlaku Kompaktní kryt s nízkou hlavou ideální pro instalaci do ventilů Provozní
Indukční snímač otáček Ri360P0-QR24M0-ELU4X2-H1151/S97
 necitlivost vůči rušivým elektromagnetickým polím nastavitelný měřicí rozsah rozlišení 16 bitů 8 30 VDC 0,5 4,5 V konektor M12 x 1 Schéma zapojení 1590909 Poznámka předpokládané dodávky od 4. kvartálu
necitlivost vůči rušivým elektromagnetickým polím nastavitelný měřicí rozsah rozlišení 16 bitů 8 30 VDC 0,5 4,5 V konektor M12 x 1 Schéma zapojení 1590909 Poznámka předpokládané dodávky od 4. kvartálu
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Pevnostní analýza plastového držáku
 Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
Pevnostní analýza plastového držáku Zpracoval: Petr Žabka Jaroslav Beran Pracoviště: Katedra textilních a jednoúčelových strojů TUL In-TECH 2, označuje společný projekt Technické univerzity v Liberci a
Indukční lineární senzor LI100P0-Q25LM0-ESG25X3-H1181
 kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 0,001 mm 15 30 VDC konektor M12 x 1,
kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 0,001 mm 15 30 VDC konektor M12 x 1,
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Indukční snímač otáček Ri360P0-QR24M0-MRTUX3-H1151
 1590906 Poznámka předpokládané dodávky od 3. kvartálu 2013 kompaktní a robustní pouzdro různé způsoby montáže zobrazení stavu pomocí LED neobsahuje snímací element a hliníkový ochranný kroužek 16 bitů
1590906 Poznámka předpokládané dodávky od 3. kvartálu 2013 kompaktní a robustní pouzdro různé způsoby montáže zobrazení stavu pomocí LED neobsahuje snímací element a hliníkový ochranný kroužek 16 bitů
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Překlad Katalog Micropulse Balluff
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Překlad Katalog Micropulse Balluff SN 172 JOSEF DOVRTĚL Balluff je přední světový výrobce v oblasti snímačové technologie. Náš výrobní
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Překlad Katalog Micropulse Balluff SN 172 JOSEF DOVRTĚL Balluff je přední světový výrobce v oblasti snímačové technologie. Náš výrobní
Zpětnovazební prvky a čidla odměřování. Princip a funkce fotoelektrických snímačů.
 Zpětnovazební prvky a čidla odměřování. Princip a funkce fotoelektrických snímačů. Radomír Mendřický Elektrické pohony a servomechanismy 14. 4. 2014 Obsah prezentace Úvod Princip a funkce fotoelektrických
Zpětnovazební prvky a čidla odměřování. Princip a funkce fotoelektrických snímačů. Radomír Mendřický Elektrické pohony a servomechanismy 14. 4. 2014 Obsah prezentace Úvod Princip a funkce fotoelektrických
Měření emisí spalovacích motorů a příprava přístrojů před měřením
 Měření emisí spalovacích motorů a příprava přístrojů před měřením Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Měření emisí spalovacích motorů a příprava přístrojů před měřením Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Přenos signálů, výstupy snímačů
 Přenos signálů, výstupy snímačů Topologie zařízení, typy průmyslových sběrnic, výstupní signály snímačů Přenosy signálů informací Topologie Dle rozmístění ŘS Distribuované řízení Většinou velká zařízení
Přenos signálů, výstupy snímačů Topologie zařízení, typy průmyslových sběrnic, výstupní signály snímačů Přenosy signálů informací Topologie Dle rozmístění ŘS Distribuované řízení Většinou velká zařízení
Účinky měničů na elektrickou síť
 Účinky měničů na elektrickou síť Výkonová elektronika - přednášky Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Definice pojmů podle normy ČSN
Účinky měničů na elektrickou síť Výkonová elektronika - přednášky Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Definice pojmů podle normy ČSN
Indukční lineární senzor LI1000P0-Q25LM0-LIU5X3-H1151
 kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC Analogový
kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC Analogový
Kapacitní senzory. ε r2. Změna kapacity důsledkem změny X. b) c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod
 c) ε r1. a) aktivní plochy elektrod. b)vzdálenosti elektrod") Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
Kapacitní senzory a) b) c) ε r1 Změna kapacity důsledkem změny a) aktivní plochy elektrod d) ε r2 ε r1 e) ε r2 b)vzdálenosti elektrod c)plochy dvou dielektrik s různou permitivitou d) tloušťky dvou dielektrik
Lineární snímač polohy Temposonics TH
 MTS Sensors Group Lineární snímač polohy Temposonics TH s analogovým výstupem Certifikáty ATEX a IECEx Dlouhodobý provoz v náročných podmínkách Tlakové zapouzdření pro zvýšení provozní bezpečnosti Magnetostrikční
MTS Sensors Group Lineární snímač polohy Temposonics TH s analogovým výstupem Certifikáty ATEX a IECEx Dlouhodobý provoz v náročných podmínkách Tlakové zapouzdření pro zvýšení provozní bezpečnosti Magnetostrikční
Indukční úhlový senzor s analogovým výstupem pro nasazení v palubní síti vozidel RI360P1-QR14-ELU4X2-0.3-RS5/S97
 kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky pro vozidla s 12V a 24V zvýšená odolnost vůči vyzařovanému rušení 30 V/m dle typového povolení e1 ochrana proti rušení šířícím
kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky pro vozidla s 12V a 24V zvýšená odolnost vůči vyzařovanému rušení 30 V/m dle typového povolení e1 ochrana proti rušení šířícím
Energetická bilance elektrických strojů
 Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
MOTORY A ŘÍZENÍ POHONŮ MAXON verze 1.5 ( ) Základní parametry řídicích jednotek rychlosti pro motory DC a EC. maxon
 Základní parametry řídicích jednotek rychlosti pro motory DC a EC. maxon") Základní parametry řídicích jednotek pro motory DC a EC maxon výtah z dokumentu MOTORY A ŘÍZENÍ POHONŮ Verze 1.5 (25. 3. 2008) UZIMEX PRAHA, spol. s r.o. 1/6 Základní parametry řídicích jednotek DC Vybavení
Základní parametry řídicích jednotek pro motory DC a EC maxon výtah z dokumentu MOTORY A ŘÍZENÍ POHONŮ Verze 1.5 (25. 3. 2008) UZIMEX PRAHA, spol. s r.o. 1/6 Základní parametry řídicích jednotek DC Vybavení
Indukční lineární senzor LI300P0-Q25LM0-LIU5X3-H1151
 kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC analogový výstup
kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC analogový výstup
Lineární snímač polohy Temposonics EP
 MTS Sensors Group Lineární snímač polohy Temposonics EP Robustní průmyslový snímač Bezkontaktní snímání lineární polohy Měřicí rozsah 50-1500 mm / 50 3250 mm Absolutní měření polohy s linearitou lepší
MTS Sensors Group Lineární snímač polohy Temposonics EP Robustní průmyslový snímač Bezkontaktní snímání lineární polohy Měřicí rozsah 50-1500 mm / 50 3250 mm Absolutní měření polohy s linearitou lepší
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr
 Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Indukční úhlový senzor s analogovým výstupem RI360P1-DSU35-ELIU5X2-H1151
 kvádrové pouzdro DSU35 plast PP-GF30-VO snímání hodnoty úhlu 0 až 360 snímací element P1-Ri-DSU35 součástí dodávky zobrazení měřicího rozsahu na LED nastavitelný měřicí rozsah necitlivost vůči rušivým
kvádrové pouzdro DSU35 plast PP-GF30-VO snímání hodnoty úhlu 0 až 360 snímací element P1-Ri-DSU35 součástí dodávky zobrazení měřicího rozsahu na LED nastavitelný měřicí rozsah necitlivost vůči rušivým
Magnetický ovládací lineární senzor WIM160-Q25L-Li-Exi-H1141
 ATEX kategorie II 2 G, Ex zóna 1 ATEX kategorie II (2) D, Ex zóna 21 kvádr, hliník / plast různé způsoby montáže necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 2drát, 14 30 VDC Analogový
ATEX kategorie II 2 G, Ex zóna 1 ATEX kategorie II (2) D, Ex zóna 21 kvádr, hliník / plast různé způsoby montáže necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 2drát, 14 30 VDC Analogový
Výhody/Použití. Neomezená mez únavy při ± 100% jmenovitého zatížení. Nanejvýš odolný vůči příčným silám a ohybovým momentům
 Datový list Snímač síly Série RF-I (160 kn 4000 kn) Výhody/Použití Třída přesnosti 0,05 Pro statické i dynamické síly v tahu a tlaku Neomezená mez únavy při ± 100% jmenovitého zatížení Obzvláště odolný
Datový list Snímač síly Série RF-I (160 kn 4000 kn) Výhody/Použití Třída přesnosti 0,05 Pro statické i dynamické síly v tahu a tlaku Neomezená mez únavy při ± 100% jmenovitého zatížení Obzvláště odolný
Elektromechanické měřicí přístroje
 Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
Elektromechanické měřicí přístroje Lubomír Slavík TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247),
Lineární snímač polohy Temposonics TH
 MTS Sensors Group Lineární snímač polohy Temposonics TH s analogovým výstupem a certifikací SIL2 Certifikáty ATEX, IECEx A SIL2 Dlouhodobý provoz v náročných podmínkách Tlakové zapouzdření pro zvýšení
MTS Sensors Group Lineární snímač polohy Temposonics TH s analogovým výstupem a certifikací SIL2 Certifikáty ATEX, IECEx A SIL2 Dlouhodobý provoz v náročných podmínkách Tlakové zapouzdření pro zvýšení
Indukční úhlový senzor s analogovým výstupem pro nasazení v palubní síti vozidel Ri360P1-QR14-ELU4X2/S97
 kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky pro vozidla s 12V a 24V zvýšená odolnost vůči vyzařovanému rušení 30 V/m dle typového povolení e1 ochrana proti rušení šířícím
kvádr, plast různé způsoby montáže snímací element P1-Ri-QR14 součástí dodávky pro vozidla s 12V a 24V zvýšená odolnost vůči vyzařovanému rušení 30 V/m dle typového povolení e1 ochrana proti rušení šířícím
7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory
 7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček:
Indukční lineární senzor LI900P0-Q25LM0-LIU5X3-H1151
 kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC analogový
kvádr, hliník / plast různé způsoby montáže zobrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím extrémně krátká mrtvá zóna rozlišení 12 bitů 4drát, 15 30 VDC analogový
7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory
 7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory Prof. Pavel Ripka Katedra měření ČVUT v Praze, FEL Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti 2014 A3B38SME
7. Měření lineární a úhlové polohy. Optoelektronické a ultrazvukové senzory Prof. Pavel Ripka Katedra měření ČVUT v Praze, FEL Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti 2014 A3B38SME
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Zpracoval: Ing Vladimír Michna. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
 Snímače č polohy, dráhy a jejich derivací - 2 Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Snímače č polohy, dráhy a jejich derivací - 2 Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Magnetický ovládací lineární senzor WIM125-Q25L-Li-Exi-H1141
 ATEX kategorie II 2 G, Ex zóna 1 ATEX kategorie II (2) D, Ex zóna 21 kvádr, hliník / plast různé způsoby montáže necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 2drát, 14 30 VDC Analogový
ATEX kategorie II 2 G, Ex zóna 1 ATEX kategorie II (2) D, Ex zóna 21 kvádr, hliník / plast různé způsoby montáže necitlivost vůči cizím magnetickým polím extrémně krátká mrtvá zóna 2drát, 14 30 VDC Analogový
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
FYZIKA II. Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování)
") FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
Tématické okruhy teoretických zkoušek Part 66 1 Modul 3 Základy elektrotechniky
 Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Aparatura pro měření relativních vibrací MRV 2.1
 Aparatura pro měření relativních vibrací MRV 2.1 Jednokanálová aparatura pro měření relativních vibrací typu MRV 2.1 je určena pro měření relativních vibrací točivých strojů, zejména energetických zařízení
Aparatura pro měření relativních vibrací MRV 2.1 Jednokanálová aparatura pro měření relativních vibrací typu MRV 2.1 je určena pro měření relativních vibrací točivých strojů, zejména energetických zařízení
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU
 6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Indukční lineární senzor Li600P0-Q25LM0-ELIU5X3-H1151
 kvádr, hliník / plast různé způsoby montáže zbrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím velice krátká mrtvá zóna rozlišení 16 bitů 4drát, 15 30 VDC Analogový
kvádr, hliník / plast různé způsoby montáže zbrazení měřicího rozsahu pomocí LED necitlivost vůči rušivým elektromagnetickým polím velice krátká mrtvá zóna rozlišení 16 bitů 4drát, 15 30 VDC Analogový
Zpracoval: Ing Vladimír Michna. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
 Frekvenční č analýza vetknutého nosníku pomocí analyzátoru PULSE Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Frekvenční č analýza vetknutého nosníku pomocí analyzátoru PULSE Zpracoval: Ing Vladimír Michna Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH
Vizualizace dějů uvnitř spalovacího motoru
 Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
Vizualizace dějů uvnitř spalovacího motoru Zpracoval: Josef Blažek Pracoviště: Katedra vozidel a motorů, TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Výhody/Použití. Neomezená mez únavy při ± 80% jmenovitého zatížení. Jednoduchá montáž, rozličné způsoby připojení
 D a t o v ý l i s t S n í m ač momentu síly S é r i e M ( 2 N m 1 0 0 0 0 N m ) Výhody/Použití Pro statické i dynamické momenty Nerezavějící provedení Neomezená mez únavy při ± 80% jmenovitého zatížení
D a t o v ý l i s t S n í m ač momentu síly S é r i e M ( 2 N m 1 0 0 0 0 N m ) Výhody/Použití Pro statické i dynamické momenty Nerezavějící provedení Neomezená mez únavy při ± 80% jmenovitého zatížení
České vysoké učení technické v Praze Fakulta elektrotechnická. Katedra měření. Dokumentace. Rotační enkodér
 České vysoké učení technické v Praze Fakulta elektrotechnická Katedra měření Dokumentace Rotační enkodér Zpracovali Jan Paštyka a Ondřej Hruška 30. dubna 2017 1 Základní informace Rotační enkodér slouží
České vysoké učení technické v Praze Fakulta elektrotechnická Katedra měření Dokumentace Rotační enkodér Zpracovali Jan Paštyka a Ondřej Hruška 30. dubna 2017 1 Základní informace Rotační enkodér slouží
Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků,
 5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
u = = B. l = B. l. v [V; T, m, m. s -1 ]
![u = = B. l = B. l. v [V; T, m, m. s -1 ]](/thumbs/51/28180013.jpg "u = = B. l = B. l. v [V; T, m, m. s -1 ]") 5. Elektromagnetická indukce je děj, kdy ve vodiči, který se pohybuje v magnetickém poli a protíná magnetické, indukční čáry, vzniká elektrické napětí. Vodič se stává zdrojem a je to nejrozšířenější způsob
5. Elektromagnetická indukce je děj, kdy ve vodiči, který se pohybuje v magnetickém poli a protíná magnetické, indukční čáry, vzniká elektrické napětí. Vodič se stává zdrojem a je to nejrozšířenější způsob
SINEAX U 554 Převodník střídavého napětí s různými charakteristikami
 S připojením napájecího napětí Měření efektivní hodnoty Pouzdro P13/70 pro montáž na lištu Použití Převodník SINEAX U 554 (obr. 1) převádí sinusové nebo zkreslené střídavé napětí na vnucený stejnosměrný
S připojením napájecího napětí Měření efektivní hodnoty Pouzdro P13/70 pro montáž na lištu Použití Převodník SINEAX U 554 (obr. 1) převádí sinusové nebo zkreslené střídavé napětí na vnucený stejnosměrný
Bezdotykové rotační senzory RI360P0-QR24M0-INCRX2-H1181
 kompaktní a robustní pouzdro různé způsoby montáže zobrazení stavu pomocí LED zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím 1024 impulzů na otáčku (nastavení z výroby)
kompaktní a robustní pouzdro různé způsoby montáže zobrazení stavu pomocí LED zobrazení měřicího rozsahu na LED necitlivost vůči rušivým elektromagnetickým polím 1024 impulzů na otáčku (nastavení z výroby)
Snímač napětí lana. Popis. Poznámky. Měřící rozsahy. Použití. Pro ochranu proti přetížení
 Kraft Druck T emperatur Schalten Snímač napětí lana Pro ochranu proti přetížení Popis U mnoha aplikací se musí napětí lana pečlivě a kontinuálně hlídat. Obvyklým způsobem bývá použití snímače síly, který
Kraft Druck T emperatur Schalten Snímač napětí lana Pro ochranu proti přetížení Popis U mnoha aplikací se musí napětí lana pečlivě a kontinuálně hlídat. Obvyklým způsobem bývá použití snímače síly, který
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu řídícího systému - analogové systémy v řízení výrobních strojů Autor: Doc. Ing. Josef
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu řídícího systému - analogové systémy v řízení výrobních strojů Autor: Doc. Ing. Josef
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr
 11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA
 Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA 1. Technická specifikace Možnost napájení ze sítě nebo akumulátoru s UPS funkcí - alespoň 2 hodiny provozu z akumulátorů
Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA 1. Technická specifikace Možnost napájení ze sítě nebo akumulátoru s UPS funkcí - alespoň 2 hodiny provozu z akumulátorů
Optoelektronické. snímače BOS 18M. BOS 18M standardní. BOS 18M robustní. Vlastnosti
 Optoelektronické standardní Typová řada v kovovém pouzdře (mosaz niklovaná) se stala uznávaným standardem v automatizaci. Velký dosah a snímací vzdálenost, stejně jako výkonná technologie (potlačené pozadí
Optoelektronické standardní Typová řada v kovovém pouzdře (mosaz niklovaná) se stala uznávaným standardem v automatizaci. Velký dosah a snímací vzdálenost, stejně jako výkonná technologie (potlačené pozadí
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU
 6. MĚŘENÍ SÍLY A ROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
6. MĚŘENÍ SÍLY A ROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK
 STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
Optoelektronické. snímače BOS 26K
 Typová řada představuje další logický vývoj již úspěšné konstrukce: jednotné pouzdro pro všechny použité typy snímačů. Z tohoto důvodu je řada kompatibilní s řadou BOS 5K a doplňuje ji novými druhy snímačů
Typová řada představuje další logický vývoj již úspěšné konstrukce: jednotné pouzdro pro všechny použité typy snímačů. Z tohoto důvodu je řada kompatibilní s řadou BOS 5K a doplňuje ji novými druhy snímačů
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
D a t o v ý l i s t. S n í m ač síly. S é r i e K. ( 4 k N k N ) Výhody/Použití. Varianty. Pro statické i dynamické síly v tahu a tlaku
 Výhody/Použití. Varianty. Pro statické i dynamické síly v tahu a tlaku") D a t o v ý l i s t S n í m ač síly S é r i e K ( k N 6 3 0 k N ) Výhody/Použití Pro statické i dynamické síly v tahu a tlaku Hermeticky těsný Necitlivý vůči změně působení síly Neomezená mez únavy při
D a t o v ý l i s t S n í m ač síly S é r i e K ( k N 6 3 0 k N ) Výhody/Použití Pro statické i dynamické síly v tahu a tlaku Hermeticky těsný Necitlivý vůči změně působení síly Neomezená mez únavy při
Proudové převodníky AC proudů
 řada MINI MINI série 10 Malé a kompaktní. Řada navržená pro měření proudů od několika miliampérů až do 150 A AC. Díky svému tvaru jsou velmi praktické a snadno použitelné i v těsných prostorech. Jsou navrženy
řada MINI MINI série 10 Malé a kompaktní. Řada navržená pro měření proudů od několika miliampérů až do 150 A AC. Díky svému tvaru jsou velmi praktické a snadno použitelné i v těsných prostorech. Jsou navrženy
II. Nakreslete zapojení a popište funkci a význam součástí následujícího obvodu: Integrátor s OZ
 Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Verze 2. Měření teploty - 1. Doplněná inovovaná přednáška. Pracoviště: Katedra textilních a jednoúčelových strojů TUL
 Verze 2 Měření teploty - 1 Doplněná inovovaná přednáška Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Verze 2 Měření teploty - 1 Doplněná inovovaná přednáška Pracoviště: Katedra textilních a jednoúčelových strojů TUL Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.