FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE. Vedoucí práce: Ing. Bronislav Koska, Ph.D. Katedra speciální geodézie
|
|
|
- Marta Jandová
- před 6 lety
- Počet zobrazení:
Transkript
1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE ZAMĚŘENÍ DIPLOMOVÁ PRÁCE HRADU A VYTVOŘENÍ JEHO 3D MODELU Vedoucí práce: Ing. Bronislav Koska, Ph.D. Katedra speciální geodézie červen 2011 Bc. Martin ČÍŽEK
2
3 Prohlášení Prohlašuji, že diplomovou práci na téma Zaměření hradu a vytvoření jeho 3D modelu jsem vypracoval samostatně. Veškerou použitou literaturu a další podkladové zdroje a materiály jsem uvedl v seznamu použité literatury, který je součástí této diplomové práce. V Praze dne Martin Čížek
4 Poděkování Rád bych na tomto místě poděkoval Ing. Bronislavu Koskovi, Ph.D. za jeho připomínky, pomoc a odborné vedení při zpracování této diplomové práce.
5 Anotace Tato diplomová práce se zabývá tvorbou 3D prostorového modelu objektu zříceniny hradu Dražice, který se nachází nedaleko Benátek nad Jizerou. Pro měření byla využita metoda laserového skenování. V práci je popsán pracovní postup sběru dat v terénu a postup prací vedoucích k vytvoření výsledného modelu objektu. Anotation This diploma thesis deals with the creation of 3D spatial object model Drazice ruins, located near Benátky nad Jizerou. For the measurement was used laser scanning method. The paper describes the working process of collecting data in the field and progress of the work leading to the creation of the final object model.
6 OBSAH 1 ÚVOD LASEROVÉ SKENOVACÍ SYSTÉMY ZÁKLADNÍ TYPY A DĚLENÍ SKENOVACÍCH SYSTÉMŮ Statické skenovací systémy Dělení skenerů podle principu měření Dělení skenerů podle zorného pole Dělení skenerů podle dosahu Dělení skenerů podle přesnosti Dělení skenerů podle rychlosti skenování Kinematické skenovací systémy ZÁKLADNÍ PRINCIP FUNGOVÁNÍ LASEROVÉHO SKENERU Princip měření délky Elektronický způsob měření délky Optoelektronický způsob měření délky Metody rozmítání laserového svazku HISTORIE HRADU DRAŽICE PRÁCE V TERÉNU PŘÍPRAVNÉ PRÁCE MĚŘICKÉ POMŮCKY POSTUP MĚŘENÍ KANCELÁŘSKÉ PRÁCE PROGRAM CYCLONE Registrace mračen Čištění a export mračna bodů PROGRAM GEOMAGIC Import, registrace a čištění mračna bodů Redukce šumu Sjednocení vzorkování Vytvořeni povrchu objektu a vyplnění děr Odstranění převrácených trojúhelníků a spojování částí modelu POKRYTÍ MODELU TEXTURAMI Kalibrace kamery
7 5.3.2 Idealizace použitých snímků Transformace snímků ZÁVĚR...52 SEZNAM LITERATURY...54 SEZNAM OBRÁZKŮ...56 SEZNAM TABULEK...58 SEZNAM PŘÍLOH

8 1 ÚVOD Tato diplomová práce se zabývá zaměřením a vyhotovením 3D modelu zříceniny hradu Dražice, který se nachází ve Středočeském kraji nedaleko Benátek nad Jizerou. Zřícenina tohoto hradu byla zvolena po domluvě s Prof. PhDr. Tomášem Durdíkem, DrSc., z Archeologického ústavu Akademie věd České republiky, který je odborníkem na české památky a upozorňoval na značné zhoršení stavu zříceniny v posledních několika letech. Cílem je pomocí metody laserového skenování zachytit současný stav vybraného objektu. Získaná prostorová data je nejprve nutné zpracovat a následně vyhotovit 3D model hradu. Nakonec je třeba pokrýt povrch vytvořeného modelu texturami získanými z dříve pořízených snímků. Diplomová práce je rozdělena do pěti kapitol. Nejprve pro nastínění celé tematiky stručně objasním základní pojmy laserového skenování a rozdělení jednotlivých typů skenerů. V další kapitole se krátce zmíním o historii zaměřovaného hradu Dražice. Dále bude uveden popis měřických prací v terénu, použité pomůcky a postup sběru prostorových dat. Předposlední kapitola se zabývá zpracováním pořízených dat v kanceláři, jednotlivými kroky a použitými programy při tvorbě výsledného 3D modelu objektu. V závěru bude shrnut postup celého zpracování a uvedeny ukázky výsledného modelu hradu. Obr. 1.1 Zřícenina hradu Dražice 9
9 2 LASEROVÉ SKENOVACÍ SYSTÉMY Laserové skenovací systémy slouží k bezkontaktnímu určování prostorových souřadnic, 3D modelování a vizualizaci staveb a konstrukcí, interiérů, podzemních prostor a terénu. Je možné je využít k dokumentaci historických, památkových i archeologických objektů. Skenování není omezeno velikostí ani tvarem snímaného objektu. Od klasických metod se odlišují neselektivním sběrem dat, přesností, vysokou rychlostí a automatizací měření. Zaměřovaný objekt lze zobrazit ve speciálním software jako mračno bodů, ze kterého je vytvořen požadovaný model objektu. Tento model lze dále převést do CAD systému. Převážná většina laserových skenerů využívá pulzní nebo fázový dálkoměr pro měření vzdáleností a prostorovou polární metodou určuje polohu bodů. Mezi hlavní výhody laserových skenovacích systémů patří: - přesnost měření a vyšší produktivita práce - zkrácení doby práce v terénu a vyšší bezpečnost - možnost měření za plného provozu nebo jen s minimálními odstávkami provozu - zpracování modelu složitých objektů - rychlé zpracování modelů terénu Laserový skenovací systém je tvořen 3D skenerem, řídící jednotkou, programem pro řízení skenování, programem pro zpracování naměřených dat a dalším příslušenstvím. 3D skener je zařízení, které po zadání parametrů skenování provede automatické určování prostorových souřadnic bodů na objektu. Řídící jednotku představuje počítač, který je vybaven programem pro řízení vlastního skenování. Počítač může být umístěn externě a spojen se skenerem pomocí datového kabelu nebo interně přímo jako součást hardwarového vybavení skeneru. V programu pro řízení skenování se nastavují požadované parametry skenování jako je velikost a poloha skenovaného prostoru, hustota skenování, nastavení snímkování kamerou, atd. Program dále řídí činnost skeneru a provádí registraci dat. V programu pro zpracování naměřených dat se naměřená data zpracují do výsledné podoby modelu objektu. Příslušenství skenovacího systému tvoří většinou stativ, baterie, signalizační terče, napájecí a datové kabely, atd. 10
10 2.1 Základní typy a dělení skenovacích systémů Skenovací systémy lze dělit podle různých kritérií. Hlavní kritérium dělení je podle umístění skeneru. Pokud je skener pevně umístěn na Zemi, jedná se o statický skenovací systém, pokud je skener umístěn na pohyblivém zařízení (auto, letadlo, atd.), jedná se o kinematický skenovací systém. Dále můžeme skenovací systémy dělit podle principu měření, zorného pole, dosahu, přesnosti a rychlosti skenování Statické skenovací systémy Dělení skenerů podle principu měření Schematické znázornění dělení skenerů podle principu měření je patrné z následujícího obrázku. Obr. 2.1 Rozdělení skenerů U polárního skeneru, který měří přímo prostorovou vzdálenost, pracuje dálkoměr na principu měření transitního času nebo vzniklého fázového rozdílu. Souřadnice bodů jsou určovány prostorovou polární metodou. U základnových skenerů využívajících projektor nebo laser je vzniklá stopa na objektu snímána jednou nebo více kamerami. Jednokamerový základnový skener je tvořen CCD kamerou, rotujícím zrcátkem a zdrojem laseru (Obr. 2.2). Základnu zde tvoří vzdálenost mezi středem rotujícího zrcátka a CCD kamerou. Obdobný způsob je využit u základnového skeneru s projektorem, kde rotující zrcátko a laser nahrazuje projektor. Dvoukamerový základnový skener je tvořen dvěma CCD kamerami a projektorem nebo zdrojem laseru, 11
11 který tvoří stopu (Obr. 2.3). V obou případech skeneru se základnou jsou souřadnice bodů určovány protínáním z úhlů ze základny. Základnové skenery využívající optické korelace nepoužívají žádný způsob promítání stopy na objekt, ten je pouze snímán dvěma a více kamerami. Body jsou následně vypočítávány pomocí speciálního programu. Obr. 2.2 Skener se základnou jednokamerový [3] Obr. 2.3 Skener se základnou dvoukamerový [3] Dělení skenerů podle zorného pole Zorné pole je jeden z významných parametrů 3D laserových skenovacích systémů. Udává se ve stupních v horizontálním a vertikálním směru a je to oblast, kterou je schopen skener nasnímat. Pokud je laserový svazek rozmítán do malého zorného pole jedná se o skenery kamerové. Zde je rozmítání paprsku zajištěno pomocí 12
12 dvou zrcadel nebo hranolů jejichž osy otáčení jsou vzájemně kolmé. Skenery, jejichž zorné pole pokryje téměř celé okolí, se nazývají panoramatické. Zde je pomocí servomotorů otáčena celá dálkoměrná soustava. Na obrázku je názorně demonstrován rozdíl mezi kamerovým a panoramatickým skenerem. Obr. 2.4 Kamerový a panoramatický skener [3] Dělení skenerů podle dosahu Dle [2] jsou skenovací systémy rozděleny do následujících čtyř skupin: - systémy s velmi krátkým dosahem D1 (0,1 m až 2,0 m) - systémy s krátkým dosahem D2 (2 m až 10 m) - systémy se středním dosahem D3 (10 m až 100 m) - systémy s dlouhým dosahem D4 (100 m až stovky m) Dělení skenerů podle přesnosti Dle [2] jsou skenovací systémy rozděleny podle přesnosti v závislosti na dosahu do následujících čtyř skupin: - systémy s malou základnou a velmi vysokou přesností pro velmi krátké vzdálenosti P1 (0,01 mm až 1,0 mm) - systémy s vysokou přesností a krátkým dosahem P2 (0,5 mm až 2 mm) - systémy se střední přesností a středním dosahem P3 (2 mm až 6 mm) - systémy s nízkou přesností a dlouhým dosahem P4 (10 mm až 100 mm) 13
13 Dělení skenerů podle rychlosti skenování Dle [2] jsou skenovací systémy rozděleny do následujících čtyř skupin podle rychlosti skenování podrobných bodů: - systémy s velmi vysokou rychlostí R1 (více jak bodů za sekundu) - systémy s vysokou rychlostí R2 (1 000 až bodů za sekundu) - systémy se střední rychlostí R3 (10 až bodů za sekundu) - systémy s nízkou rychlostí R4 (do 10 bodů za sekundu) Skenery se základnou a polární skenery s fázovým dálkoměrem skenují velmi vysokou rychlostí. Polární skenery s dálkoměrem měřící transitní čas skenují většinou s vysokou rychlostí. Nízkou rychlostí měří například totální stanice se skenovacím modulem Kinematické skenovací systémy Kinematické systémy lze rozdělit do dvou skupin. Do první skupiny patří systémy umístěné na zařízení pohybující se mimo povrch Země (letadlo, vrtulník, družice, atd.), do druhé skupiny patří systémy, které jsou umístěné na zařízení pohybující se po Zemi (auto, drezína, atd.). Letecké laserové skenování bylo původně vojenskou technologií, která se uvolnila i do civilního sektoru. Velký rozvoj proběhl v několika posledních letech, kdy se letecké laserové skenování dostalo i na území České republiky. Systém může být instalován v letadle (pro tvorbu modelu terénu) nebo ve vrtulníku pro detailnější měření objektů. Velkou výhodou těchto systémů je jejich rychlost při pořizování dat a zpracování. Kinematické terestrické systémy slouží především pro mapování, sběr dat pro GIS, určování průjezdných profilů, atd. Systémy jsou umístěny na automobilech, železničních vozech či drezínách, lodích, atd. Pro vlastní skenování je použit 2D skener, který skenuje okolí v příčné rovině. Skenování je zajištěno vlastním pohybem zařízení v podélném směru. Pomocí GPS a dalších zařízení je určována poloha pohybujícího se skenovacího systému. 14
14 2.2 Základní princip fungování laserového skeneru Základním principem měření podrobných bodů laserovým skenerem je prostorová polární metoda. K určení souřadnic podrobného bodu je třeba znát vzdálenost a dva úhly. Vzdálenost je měřena dálkoměrem, nejčastěji impulsním, který je synchronizovaný s odečítáním polohy zrcadel. Zrcadla slouží k rozmítání laserového svazku a z jejich polohy se určují požadované úhly. Vzdálenost lze také určovat optickým způsobem ze známé základny a dvou přilehlých úhlů. Výsledkem jsou prostorové souřadnice v systému, který je obecně orientován a umístěn. Pro skenování objektu se používají různé metody rozmítání laserového svazku (viz. kapitola 2.2.2). Pomocí těchto metod se na objektu měří podrobné body v profilech se zadanou hustotou. Pro zlepšení orientace v získaném mračně bodů se body zobrazují příslušnou barvou podle intenzity odraženého signálu z dálkoměru. Lze tak odlišit materiál, úpravy a tvary povrchu Princip měření délky Elektronický způsob měření délky Na schématu (Obr. 2.5) je zobrazen princip měření délky dálkoměrem. Elektromagnetické vlnění je vysláno z vysílače, odrazí se přímo od objektu zpět k dálkoměru a je zachyceno přijímačem. Elektronické dálkoměry ve skenerech mohou být buď impulsní nebo fázové. DÁLKOMĚR VYSÍLAČ OBJEKT PŘIJÍMAČ d Obr. 2.5 Princip měření délky elektronickým dálkoměrem [3] 15
15 Princip impulsního dálkoměru je založen na měření transitního času, tedy času, který impuls potřebuje k uražení dvojnásobné měřené vzdálenosti. S vysláním impulzu se spustí i elektronický měřič času, který se ukončí po zachycení odraženého impulzu. Na základě rychlosti šíření impulsu lze určit dvojnásobnou hodnotu měřené vzdálenosti. Jelikož je transitní čas velmi malý, je třeba ho určovat s velmi vysokou přesností. Princip fázového dálkoměru je založen na zjištění fázového rozdílu mezi vyslaným a přijatým signálem dálkoměru. Z rozdílu fází vyslané modulované vlny a vlny zpět odražené od objektu se určí měřená délka. Dosah fázových dálkoměrů je omezen na polovinu délky vyslané modulované vlny, jelikož musí být delší než měřená vzdálenost z důvodu nemožnosti určení počtu celých vln Optoelektronický způsob měření délky Optoelektronické určování délky je založeno na řešení obecného trojúhelníku, kde známe délku základny a dva přilehlé úhly. Nevýhodami metody je pokles přesnosti s narůstající vzdáleností a omezená délka základny. Velmi vysoké přesnosti dosahuje tento způsob měření délky na velmi krátké vzdálenosti. P α β Základna Obr. 2.6 Princip měření délky optoelektronicky [3] 16
16 2.2.2 Metody rozmítání laserového svazku V laserových skenovacích systémech se k rozmítání laserového svazku používá níže uvedených pěti metod [2]. Body na povrchu objektu jsou měřeny v profilech dle nastavené hustoty. Laserový svazek lze rozmítat pomocí rotujícího zrcadla (Obr. 2.7). Pro rozmítání svazku ve dvou směrech je třeba spojení dvou rotujících zrcadel. ZRCADLO LASER Obr. 2.7 Rozmítání svazku rotujícím zrcadlem [3] Laserový svazek lze také rozmítat pomocí rotujícího odrazného hranolu. Výhodou tohoto způsobu je, že hranol neslepne. V závislosti na počtu hran dosahuje vyšší rychlosti pohybu svazku a hranol se nemusí vracet do počáteční pozice. Obr. 2.8 Rozmítání svazku odrazným hranolem [3] 17
17 Dalším způsobem rozmítání laserového svazku je rotací zařízení, které je zdrojem svazku (Obr. 2.9). Zdrojové zařízení rotuje ve dvou osách vertikálním a horizontálním směru a umožňuje tak snímání profilů s podrobnými body. Obr. 2.9 Rozmítání svazku rotací zdroje záření [3] Laserový paprsek lze také rozmítat pomocí optických vláken. Rotující zrcadlo směřuje laserový paprsek do optických vláken, která jsou uspořádány do kruhu a pak rozvinuta do roviny (Obr. 2.10). Tato rovina určuje profil rozmítání svazku. Obr Rozmítání svazku optickými vlákny [3] 18
18 Při rozmítání laserového svazku lze také využít statického optického elementu (Obr. 2.11). Toto zařízení (projektor) vytváří světelnou rovinu na měřeném objektu, který rotuje okolo své svislé osy a obraz takto vzniklé roviny na objektu je zaznamenáván CCD snímačem. Tento způsob rozmítání se používá u skenerů se základnou s optickým měřením délky. Obr Rozmítání svazku statickým optickým elementem [3] 19

19 3 HISTORIE HRADU DRAŽICE Hrad Dražice je zřícenina středověkého hradu tyčící se na skalnatém ostrohu na pravém břehu řeky Jizery. Nachází se uprostřed stejnojmenné vesnice nedaleko Benátek nad Jizerou. Hrad byl pravděpodobně založen v první polovině 13. století Řehořem z Litvic. Archeologickým průzkumem v roce 1940 bylo zjištěno, že hrad za dobu své existence prošel dvěma stavebními obdobími. První období je spojeno se zakladatelem Řehořem z Litvic. Hrad měl lichoběžníkový tvar, byl ze všech stran obehnán hlubokým příkopem a na západní přístupové straně stála samostatná okrouhlá věž hláska. Druhé období proběhlo za vlastnictví pražského biskupa Jana IV. z Dražic. Hradní palác byl zvýšen o jedno patro a rozšířen novou věžovitou stavbou, ve které byla ve druhém patře zřízena kaple. Původní hláska byla zbořena a v severovýchodní části byl přistaven další palác. Hrad za dobu svojí existence změnil několikrát majitele, mezi významné patřil rod Vartemberků. Posledním majitelem byl Bedřich z Donína. Hrad byl za husitských válek několikrát vypálen a pobořen, ale následně opraven a stále zůstal sídlem vrchnosti. Až výstavbou zámku v Benátkách nad Jizerou hrad ztratil význam, postupně pustl a v 16. století již nebyl obydlen. Z dražického hradu se do dnešní doby zachovaly pouze zbytky hlavního paláce a kaple s několika okny, pozůstatky hradních zdí a sýpka, která je stále využívána. Obr. 3.1 Kresba zříceniny hradu Dražice [10] 20

20 4 PRÁCE V TERÉNU Hrad Dražice se nachází v obci Dražice, ve Středočeském kraji, v okrese Mladá Boleslav, asi 2 km severovýchodně od Benátek nad Jizerou (Obr. 4.1). V blízkosti prochází rychlostní komunikace R10 mezi Prahou a Mladou Boleslaví. Obr. 4.1 Lokalita obce Dražice Z celého hradního areálu byly zaměřeny pouze zbytky hlavního paláce. Okolní zdi a sýpka byly zarostlé hustou vegetací do výšky přibližně 2 metry, a proto jejich zaměření nebylo provedeno. Hlavní důraz byl kladen především na zbytky paláce, zaměření jeho současného stavu a zachycení zbytků architektonicky zajímavých částí. Vlastní měřické práce proběhly dne od cca 11:00 do 19:30 hodin. Teplota vzduchu se pohybovala okolo 12 C. Stav počasí: zataženo, mírný vítr, občasný výskyt přeháněk nebo mrholení. Měření proběhlo za účasti vedoucího diplomové práce Ing. Bronislava Kosky, Ph.D. 21


21 Obr. 4.2 Letecký snímek zříceniny hradu Dražice 4.1 Přípravné práce Nejprve bylo zapotřebí připravit všechny potřebné měřické pomůcky. Před samotným měřením pak bylo nutné přibližně rozvrhnout jednotlivá postavení skeneru tak, aby měření pokrylo celou zájmovou oblast. Tato stanoviska byla zvolena po domluvě s vedoucím práce. Bylo zvoleno celkem 10 stanovisek, na kterých probíhalo měření laserovým skenerem. K provázání měření na jednotlivých stanoviscích byly na objekt a okolo stojící lampy umístěny vlícovací body. Tyto vlícovací body tvořily magnetické odrazné štítky a otočné odrazné terče. Jednotlivá stanoviska byla volena tak, aby byla umožněna viditelnost na 2 až 3 vlícovací body zaměřené z předchozího stanoviska, na kterém již proběhlo měření. Dále bylo třeba odstranit některé části vegetace v blízkém okolí objektu, které překážely v měření laserovým skenerem a zachycení správného průniku zdiva se zemí. 22
 skenery s vysokým rozlišením.")
22 4.2 Měřické pomůcky Jako měřicí přístroj byl zvolen laserový skener Leica HDS 3000 (Obr. 4.3), který byl zapůjčen Katedrou speciální geodézie. Jedná se o panoramatický 3D polární skener od firmy Leica Geosystems, který patří do skupiny skenerů HDS (High Definition Surveying) skenery s vysokým rozlišením. Skener HDS 3000 je nástupce skeneru HDS 2500, od kterého se odlišuje velikostí zorného pole 360 x 270. Toho je dosaženo systémem dvou oken, která dělí zorné pole na dvě části dolní a horní. Systém nejprve naskenuje dolní část, a poté pokračuje horní částí. Umožňuje nejen skenování celého zorného pole, ale také výběru jakékoliv jeho části. Skener má integrovanou digitální kameru, kterou může pořizovat fotografie skenované oblasti pro zpřehlednění a zjednodušení volby skenované oblasti. Skener je ovládán pomocí software Cyclone instalovaném v obslužném notebooku. Otáčení skeneru je uskutečněno pomocí servomotoru. Tento skener také umožňuje nastavit hustotu skenování podle potřeby. Dle [7] je přesnost v poloze udávána 6 mm a přesnost měřené délky 4 mm. Velikost laserové stopy je 6 mm na 50 m. Laser použitý v impulsním dálkoměru patří do bezpečnostní třídy 3R a má zelenou barvu. Obr. 4.3 Leica HDS 3000 [4] 23
23 V následující tabulce jsou přehledně uvedeny některé technické parametry laserového skeneru Leica HDS Tab. 4.1 Leica HDS 3000 technické parametry [7] Rozměry 265 mm x 370 mm x 510 mm Hmotnost 16 kg Provozní teplota 0 C až 40 C Skladovací teplota -25 C až 65 C Odolnost proti prachu a vlhkosti specifikace IP52 Vstupní napětí 12V Výdrž baterie cca 6 hodin Typ dálkoměru impulsní Barva laseru zelená Bezpečnostní třída 3R dosah (při odrazivosti 10%) 1 m m rychlost skenování 4000 bodů/sec Velikost laserové stopy 6 mm/50 m Přesnost v poloze 6 mm Přesnost v délce 4 mm Přesnost vertikálního úhlu 3,8 mgon Přesnost horizontálního úhlu 3,8 mgon Zorné pole 360 (horizontálně) x 270 (vertikálně) Rozmítání laserového svazku jedním zrcadlem, panoramaticky, skrze dvě okna Digitální kamera rozlišení 1 megapixel (1024 x 1024 pixelů) Signalizace stavu Pohon skeneru Řídící jednotka Řídící software Minimální požadavky 3 LED diody (skener připraven, laser zapnut, datová komunikace) servomotor notebook Leica Cyclone procesor 1,4 GHz, 512 MB RAM, operační systém MS Windows XP/ Windows 2000 Mezi další pomůcky patří speciální stativ pod skener s dvojitým jištěním vysunovacích nohou (Obr 4.4 vlevo), řídící notebook s datovým kabelem a řídícím software Cyclone, 2x externí baterie Leica, 2x napájecí kabel, 1x redukční kabel, benzinový generátor s prodlužovacím kabelem, sada 6 čtvercových magnetických štítků a sada 4 otočných magnetických odrazných terčů (Obr 4.4 vpravo). 24
![Obr. 4.4 Stativ s rychloupínáním a otočné odrazné terče [6] 4.3 Postup měření Po provedení rekognoskace bylo třeba rozmístit vlícovací body na hrad a do jeho okolí.](/docs-images/92/108267584/images/24-0.jpg "Celkem bylo rozmístěno 10 vlícovacích bodů, z nichž 3 body byly umístěny přímo na objekt a zbylých 7 na okolních lampách.")

24 Obr. 4.4 Stativ s rychloupínáním a otočné odrazné terče [6] 4.3 Postup měření Po provedení rekognoskace bylo třeba rozmístit vlícovací body na hrad a do jeho okolí. Celkem bylo rozmístěno 10 vlícovacích bodů, z nichž 3 body byly umístěny přímo na objekt a zbylých 7 na okolních lampách. Vlícovací body však byly číslovány od 1 do 12 a to vinou chyby v číslování při zadávání čísel do programu během měření. Čísla bodů 5 a 6 byla duplicitní s čísly 4 a 12. Z níže uvedeného seznamu vlícovacích bodů nakonec nebyly ještě použity body 9 a 10 jelikož byly nevhodně zvoleny a viditelné pouze z jednoho stanoviska. Tab. 4.2 Vlícovací body Bod Typ Umístění 1 čtvercový magnetický štítek 7,5 x 7,5 cm mříže okna 2 kruhový otočný terč 15 cm s plochým magnetickým podstavcem otvor okna 3 kruhový otočný terč 15 cm s plochým magnetickým podstavcem volně na zdi 4 čtvercový otočný terč 7,5 x 7,5 cm s magnetickým V-blok podstavcem lampa 7 čtvercový otočný terč 7,5 x 7,5 cm s plochým magnetickým podstavcem otvor okna 8 čtvercový magnetický štítek 7,5 x 7,5 cm volně na zdi 9 čtvercový magnetický štítek 7,5 x 7,5 cm lampa 10 čtvercový magnetický štítek 7,5 x 7,5 cm lampa 11 čtvercový magnetický štítek 7,5 x 7,5 cm lampa 12 čtvercový magnetický štítek 7,5 x 7,5 cm lampa 25


25 Po rozmístění vlícovacích bodů začalo vlastní měření. Na každé stanovisko byl postupně umístěn stativ se skenerem, který se připojil k baterii a k řídícímu počítači. Po provedení několikaminutové inicializace a propojení s řídícím počítačem prostřednictvím programu Cyclone byl skener připraven k měření. Dále byla vytvořena databáze měření drazice.imp, do které se ukládala naměřená data. Po výběru skeneru v programu Cyclone, nastavení požadované hustoty skenování a výběru skenované oblasti jednoduchým nastavením krajních rozměrů zorného pole bylo možné spustit proces skenování (Obr. 4.5). Nejprve však proběhlo snímkování zadané oblasti integrovanou digitální kamerou a vytvoření jejího obrazu. Zorné pole na základě takto vytvořeného obrazu mohlo být upraveno, jelikož od jeho velikosti se odvíjel čas měření. Z obrazu bylo možné lépe odhadnout požadovaný rozměr zorného pole k pokrytí celé zájmové oblasti. Obr. 4.5 Menu programu Cyclone při skenování Po spuštění skenování se naměřené podrobné body přímo zobrazovaly na monitoru počítače, a bylo tedy možné sledovat průběh skenování. Na každém postavení stroje byl vytvořen příslušný datový soubor (ScanWorld) odpovídající jednomu 26
26 stanovisku. Do takto vzniklého ScanWorldu se ukládala naměřená mračna bodů jako jednotlivé Scany. Ty vznikly měřením objektu po několika částech v různých hustotách skenování. Celkem byly zvoleny tři typy hustoty skenování na hlavní palác, okolí a na detaily (okna, architektonické prvky, atd.). Nejvyšší hustota skenování byla zvolena na zaměření detailů objektu. Jako druhá nejvyšší byla zvolena hustota skenování hlavního paláce. Volba hustoty skenování okolních částí byla zvolena nižší především z časových a úsporných důvodů, avšak v dostačující hustotě pro tvorbu detailního modelu (Tab. 4.3). Různorodost hustoty skenování na jednotlivých stanoviscích je dána především snahou o úsporu času a požadovanou detailnost skenování. Volba hustoty skenování byla konzultována s vedoucím diplomové práce. Před skončením měření na stanovisku bylo ještě třeba provést zaměření vlícovacích bodů. Tab. 4.3 Stanoviska a jednotlivé hustoty skenování objektu Stanovisko Hustoty skenování Hlavní palác Okolní části Detaily 1 1 x 1 cm / 10 m 2 x 2 cm / 10 m 0,5 x 0,5 cm / 10 m 2 1,2 x 1,2 cm / 10 m 2 x 2 cm / 10 m x 1 cm / 2 m x 1 cm / 2 m ,2 x 1,2 cm / 10 m 2 x 2 cm / 10 m x 1 cm / 10 m 2 x 2 cm / 10 m - 7 1,2 x 1,2 cm / 10 m - 0,5 x 0,5 cm / 10 m 8 1 x 1 cm / 10 m - 0,5 x 0,5 cm / 10 m 9 1,2 x 1,2 cm / 10 m 1 x 1 cm / 2 m 0,5 x 0,5 cm / 10 m 10 1,2 x 1,2 cm / 10 m 1,2 x 1,2 cm / 10 m - Výše uvedeným způsobem bylo provedeno měření na všech deseti zvolených stanoviscích. Na prvním byla vytvořena databáze měření, do které se ukládala veškerá dále pořízená data ze všech ostatních stanovisek. Na stanoviscích 3 a 4 nebyl použit stativ, skener stál na vlastních pevných nohou. Měření zde probíhalo ve stísněných prostorách jediné hradní místnosti, kde použití stativu nebylo možné. Schematické znázornění volby jednotlivých stanovisek je patrné z Obr Náčrt znázorňující situaci, rozmístění stanovisek a vlícovacích bodů je součástí Přílohy 1. 27
27 Obr. 4.6 Schematické znázornění volby stanovisek Během měření byly použity obě dvě baterie Leica a přenosný benzinový generátor. Současně s měřením laserového skeneru byly na každém stanovisku pořízeny snímky ve vysokém rozlišení, které byly později použity jako textury pro vytvořený model objektu. Snímky pořídil Ing. Bronislav Koska, Ph.D. fotoaparátem Canon EOS 500D. 28

28 5 KANCELÁŘSKÉ PRÁCE Databázi drazice.imp s naměřenými daty bylo třeba stáhnout z řídícího počítače do počítače v kanceláři. Další postup byl rozdělen do tří částí. V první části bylo nutné provést registraci a ořez mračna v programu Cyclone, v druhé části byl vytvořen vlastní model objektu v programu Geomagic Studio a v poslední části byl povrch vytvořeného modelu pokryt texturami. 5.1 Program Cyclone Leica Cyclone je jedním z nejpoužívanější programů na zpracovaní 3D mračen bodů. Data jsou ukládána a zpracovávána v databázích, a umožňují tak práci více uživatelů najednou. Software je natolik komplexní, že v něm lze provést celé zpracování modelu od skenování, registrace, tvorby povrchu modelu, až po vizualizaci a export. Obr. 5.1 Menu programu Cyclone Základní obrazovka je rozdělena do dvou částí. První část tvoří menu jednotlivých nástrojů a možností, druhá část obsahuje souborovou strukturu založené 29

29 databáze a použité skenery. Z Obr. 5.1 je patrná struktura vytvořené databáze drazice.imp. Ta se skládá z celkem 10 ScanWorldů reprezentujících jednotlivá stanoviska, které obsahují naměřená data. Po načtení databáze bylo prvním krokem ve zpracování kontrola a případná oprava číslování vlícovacích bodů tak, aby mohla správně proběhnout registrace mračen Registrace mračen Po naskenování byla jednotlivá mračna bodů v místní souřadnicové soustavě vytvořené skenerem. Proto bylo nutné tato mračna bodů transformovat (registrovat) do jednotného souřadnicového systému shodného se systémem na prvním stanovisku. Tato registrace se provádí pomocí identických vlícovacích bodů nebo pomocí překrytu mračen metodou ICP. Vlastní registrace mračen se provádí v modulu registrace, do kterého se načtou jednotlivá mračna, tedy ScanWorld 1 až 10 (Obr. 5.2). Obr. 5.2 Modul registrace Pomocí funkce Auto-Add Constraints v menu Constraints byly automaticky vytvořeny podmínky pro provázání mračen přes vlícovací body mezi jednotlivými 30
30 ScanWorldy. Jelikož v některých ScanWorldech (3, 4 a 10) nebyly zaměřeny vlícovací body, byly přidány podmínky v menu Cloud Constraints Wizard a vytvořeny pomocí překrytu mračen metodou ICP. Po vybrání 3 identických bodů v překrytové časti mračen a nastavení příslušných parametrů pro tvorbu podmínek bylo spuštěno vyrovnání. Parametry byly následující: - vyhledávací vzdálenost: 0,030 m - procento výběru: 20% - maximální počet iterací: metoda počátečního odhadu: automaticky vybrán nejlepší odhad Vytvoření podmínek pomocí překrytu mračen bylo ještě použito mezi ScanWorldy 1-2 a 7-8, kde nebyl dostatečný počet vlícovacích bodů a výsledky registrace byly tudíž nesprávné. Po vytvoření celkem 36 podmínek již proběhla registrace úspěšně a neobsahovala žádné chyby. Absolutní chyba registrace je 0,0011 m. Výsledný protokol registrace mračen je součástí Přílohy 2. Po dokončení registrace byla všechna mračna uložena do jednoho výsledného ScanWorldu, který byl použit v dalších krocích tvorby modelu objektu Čištění a export mračna bodů Dalším krokem zpracování mračna bodů bylo odstranění nadbytečných bodů v oblastech, které nebyly dále využity. Odstraněním došlo také ke zpřehlednění situace. K mazání bodů byly použity dostupné nástroje programu Cyclone. Odstraněny byly především navíc zaměřené části okolního terénu, porostu a stromů, také část budovy sýpky a rozpadlých zdí. Snahou bylo zachovat pouze mračno obsahující zaměřovaný objekt, a odstranit tak nadbytečné body co nejblíže k hranici průniku zdiva a okolního terénu (Obr. 5.3). V programu Cyclone bylo provedeno pouze hrubé odstranění nadbytečných částí, přesné a pečlivé odstraňování proběhlo až v programu Geomagic Studio (viz. kapitola 5.2.1). Poslední fází zpracování mračna v programu Cyclone byl jeho export do textových souborů pro pozdější zpracování. Jelikož výsledné mračno bylo tvořeno mnoha dílčími mračny odpovídajícím měření na jednotlivých stanoviscích, proběhl export také po těchto částech. Z každého stanoviska byla exportována očištěná mračna 31


31 do samostatných textových souborů. Formát souboru byl zvolen tak, aby mračna patřící k jednotlivým stanoviskům byla dobře identifikovatelná. Pro přehlednost byly soubory s daty pojmenovány následujícím způsobem. Celý název uvozuje zkratka programu Cyclone cyc, následuje podtržítko a vlastní označení např. cyc_01a.txt, kde 01 je číslo příslušného stanoviska a písmeno a označuje pořadí exportovaného souboru vzhledem ke stanovisku. Souřadnice bodů mračen byly exportovány s přesností na čtyři desetinná místa. Takto bylo exportováno celkem 25 textových souborů obsahujících všechna mračna objektu. Exportované soubory jsou součástí přílohy na CD. Obr. 5.3 Očištěné mračno bodů 32

32 5.2 Program Geomagic Další zpracování mračna bodů proběhlo v programu Geomagic Studio 10, který umožňuje automatické vytvoření polygonové sítě z mračna bodů. Obsahuje také celou škálu nástrojů a funkcí, které slouží pro zjednodušování, opravování, záplatování a vyhlazování polygonové sítě. Některé nástroje umožňují tvorbu volných a parametrických ploch jako je rovina, válec, kužel, atd. Program Geomagic Studio 10 také umožňuje propojení s CAD systémy a export dat v nejrůznějších typech formátů. Pracovní obrazovka je rozdělena do 3 částí (Obr. 5.4). V horní části jsou panely s nástroji pro práci s modelem. V levé části je struktura jednotlivých mračen bodů v souboru. Pravá část obsahuje některé nástroje na selekci bodů a celkový pohled na mračno bodů a osy souřadnicového systému. Model lze také otáčet, přibližovat a nastavovat parametry zobrazení bodů mračna jako je množství zobrazených bodů, typ stínování nebo nastavení zdroje světla. Obr. 5.4 Menu programu Geomagic Studio 10 a importované mračno bodů 33

. Výsledné hodnoty z globální registrace jsou patrné z Obr. 5.5 vpravo.")
33 5.2.1 Import, registrace a čištění mračna bodů Prvním krokem ve tvorbě modelu byl import mračen bodů z programu Cyclone. Celkem bylo importováno 25 textových souborů se souřadnicemi podrobných bodů. Během importu byla zachována plná velikost dat a jednotky byly nastaveny na metry. Výsledný soubor ve formátu *.wrp obsahoval cca 9,5 milionu podrobných bodů. Dalším krokem bylo provedení globální registrace všech mračen bodů, čímž se minimalizovaly vzdálenosti jednotlivých překrytových oblastí. Tato globální registrace byla provedena pomocí nástroje v ovládacím panelu a byly ponechány přednastavené parametry (Obr. 5.5 vlevo). Výsledné hodnoty z globální registrace jsou patrné z Obr. 5.5 vpravo. Registrace byla provedena v 11 opakováních a hodnota směrodatné odchylky byla 1,54 cm, což bylo kvůli nepravidelnému povrchu zaměřovaného objektu považováno za dostačující. Obr. 5.5 Globální registrace 34
34 Po provedení globální registrace byla jednotlivá dílčí mračna sloučena pomocí funkce Merge Points Objects do jednoho výsledného mračna, na které byly aplikovány další nástroje. Po registraci mračen následovalo detailní manuální odstraňování bodů mimo zájmovou oblast. Výběr odstraňovaných bodů byl proveden pomocí standardních nástrojů (obdélník, laso, atd.). Takto byla očištěna především oblast styku zdiva se zemským povrchem a porost pokrývající některé části zdí. Pro lepší možnost výběru byly použity funkce Selected only a Reverse selection. Tímto způsobem bylo odstraněno cca 0,5 milionu bodů ležících mimo objekt. Poté byla aplikována funkce Select disconnected, která vybere skupiny odlehlých bodů na základě zadaných parametrů a následně je smaže. U této funkce byly ponechány přednastavené parametry. Počet vybraných a smazaných bodů z mračna touto funkcí byl minimální. Jako další byla aplikována funkce Select Outliers, která vybere odlehlé body vzniklé hrubými chybami nebo velkým šumem. U této funkce byla jediným nastavitelným parametrem citlivost, která byla v tomto případě nastavena na hodnotu 50%. Množství vybraných a následně smazaných bodu se pohybovalo v řádech desítek tisíc. Na Obr. 5.6 je zobrazené mračno bodů po výše uvedeném postupu odstraňování bodů ležících mimo zájmovou oblast objektu. Obr. 5.6 Očištěné mračno bodů 35

35 5.2.2 Redukce šumu Během měření podrobných bodů vznikají náhodné chyby, které jsou označovány jako šum. V programu Geomagic Studio 10 je proto zavedena funkce Reduce noise na redukci tohoto šumu. Je však nutno tuto funkci používat s rozmyslem, jelikož posunuje vybrané body do statisticky správné pozice. Pokud je tedy úroveň šumu velká a detaily malé, může redukce šumu tyto detaily zcela potlačit. Nastavení jednotlivých parametrů redukce šumu při zpracování je patrné z Obr Statistické hodnoty po spuštění funkce byly následující: průměrná vzdálenost posunu bodů je 1,9 mm a směrodatná odchylka posunu je 1,8 mm. Obr. 5.7 Redukce šumu Nastavení jednotlivých parametrů redukce šumu bylo testováno na výřezu části zájmového objektu, který obsahoval detaily architektonických prvků (ornamenty na okenní konstrukci) a úsek zdiva. Úroveň vyhlazení byla nastavena na posuvném panelu na nejnižší možnou hodnotu. Po provedení redukce šumu byl z výřezu vytvořen povrch pomocí funkce Wrap. Takto byly testovány 3 typy nastavení na části reprezentující objekt. Jako nejvýhodnější se jevilo nastavení Prismatic Shapes (aggressive) 36

36 hranolový tvar s agresivní redukcí. Všechny detaily na výřezu zůstaly nejlépe zachovány a vzniklo i nejmenší množství děr v povrchu výřezu. Toto nastavení parametrů redukce šumu bylo následně použito na celé mračno bodů objektu Sjednocení vzorkování Dalším důležitým krokem ve zpracování mračna bodů bylo použití funkce Uniform sample sjednocení vzorkování. Jedná se o typ redukce množství bodů, který zachovává všechny detaily a vytváří pravidelnou síť bodů mračna. Základními parametry je nastavení řádkování a priorita křivosti. Hodnota priority křivosti byla nastavena na maximální, aby funkce zachovala plné množství bodů v místech s velkou křivostí, a nedošlo tak ke ztrátě detailů. Jelikož bylo žádoucí, aby detaily oken s architektonickými prvky měly vyšší hustotu sítě bodů než ostatní části, bylo proto provedeno dvojí převzorkování. Detaily oken byly převzorkovány s řádkováním 5 mm a ostatní části objektu s řádkováním 10 mm. Tyto detaily oken bylo třeba nejprve vyřezat z objektu, uložit jako samostatné části a následně provést jejich převzorkování. Takto bylo celkem vybráno a převzorkováno 7 detailů oken (Obr 5.8). Obr. 5.8 Vybrané detaily oken 37

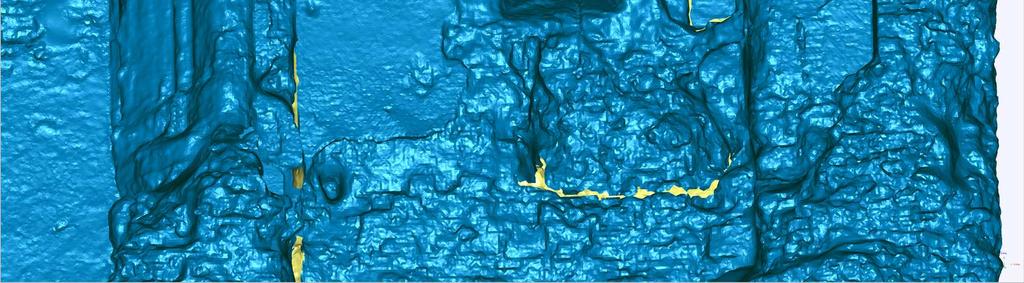
37 Nakonec bylo provedeno převzorkování i na zbývající části objektu bez oken. Takto zpracované části bylo nutné zpět sloučit do jednoho mračna bodů, opět pomocí funkce na sloučení bodových objektů Merge Points Objects. Sjednocením vzorkování byl snížen celkový počet bodů o cca 1,5 milionu na výsledných 7,6 milionu bodů Vytvořeni povrchu objektu a vyplnění děr Povrch objektu byl vytvořen pomocí funkce Wrap, která vygenerovala z mračna bodů trojúhelníkovou (polygonovou) síť. Pro povrch objektu bylo třeba v dialogovém okně nastavit přepínač na možnost Surface (povrch), redukce šumu byla vypnuta, ostatní parametry zůstaly také vypnuté (Obr. 5.9). Obr. 5.9 Tvorba povrchu Po proběhnutí funkce Wrap se program Geomagic Studio 10 přepnul do tzv. polygonové fáze, která umožňuje pomocí nově zpřístupněných funkcí dále pracovat s vytvořeným povrchem objektu. Ten obsahoval značné množství děr (cca 2300), které bylo třeba dále zaplnit. Na Obr je patrné, že velká část děr se nacházela v horní části objektu (zeleně ohraničené). V této části se vyskytovala místa, kam laserový skener nemohl měřit, jelikož svazek dopadal pod příliš strmým úhlem, a tak vznikala 38


38 prázdná místa. Některé nedostatky a díry vznikaly také v důsledku nedokonalého odstranění vegetace ze zdí objektu. Také samotný proces vytvoření povrchu z mračna bodů do jisté míry zkomplikoval situaci v horní část objektu, funkce zde nebyla schopna vytvořit povrch mezi všemi body mračna. Tím byla horní část objektu o něco snížena oproti naměřenému mračnu bodů a vzniklo velké množství děr. Obr Vytvořený povrch objektu Povrch objektu vytvořený z mračna bodů obsahoval 14,9 milionu trojúhelníků, další zpracování bylo proto velice komplikované a náročné především na výkon počítače. Také stabilita programu Geomagic Studio 10 byla nedostatečná, program při některých operacích zamrzal nebo kolaboval bez možnosti uložení dat. Takovéto množství trojúhelníků bylo příliš vysoké, komplexní zpracování povrchu modelu bylo proto nemožné. Pro zlepšení možnosti zpracování byl model rozdělen do dvou samostatných souborů (TOP.wrp a DOWN.wrp) a zpracováván dál postupně po těchto souborech. V uvedených souborech byl model dále rozřezán na menší části povrchu s cca 0,6 1,5 miliony trojúhelníky. V obou samostatných souborech tak vzniklo 14 dílčích částí, které byly dále postupně zpracovávány. Výše uvedená opatření 39

39 eliminovala problémy při tvorbě modelu, přesto byl každý dílčí úsek práce ukládán zvlášť do samostatného souboru. Po vytvoření povrchu modelu bylo třeba zaplnit vzniklé díry a opravit jeho nedostatky. Tato část byla nejpracnější a časově nejvíce náročná z celé tvorby. Jelikož povrch tvořený polygony byl více přehlednější než mračno bodů, bylo i v této fázi odstraněno množství polygonů ležících mimo zájmovou oblast nebo chybně vytvořených. Pro vyplnění děr povrchu byly použity dostupné nástroje z funkce Fill Holes, která automaticky vyhledala vzniklé díry. Především byl použit způsob vyplnění ohraničených děr, ale i způsob vyplnění jen částečně ohraničených děr. Využívána byla hlavně metoda vyplňování polygony na základě křivosti okolního povrchu. Ostatní parametry byly ponechány implicitně přednastavené. Obr Dialogové okno při vyplňování děr 40

40 Pokud bylo potřeba, byly nadbytečné trojúhelníky v okolí děr smazány a až následně proběhlo vyplnění. Takto byla opravena většina vzniklých děr v povrchu. Pro zlepšení práce s povrchem byly ostatní části objektu skryty a byla zpracovávána vždy jen jedna část povrchu v souboru. Po skončení vyplňování zůstalo cca 60 děr, které nebylo možné pro jejich velikost nebo složitost vyplnit Odstranění převrácených trojúhelníků a spojování částí modelu Po vytvoření povrchu objektu vznikly nejen díry, ale i mnoho převrácených trojúhelníků. Trojúhelníky mají normálou definovanou přední stranu (modrá) a zadní stranu (žlutá). V některých případech při tvorbě povrchu došlo k situaci, kdy zadní strana směřovala ven. Pro opravu těchto převrácených trojúhelníků byla použita funkce Repair Intersections. Dialogové okno funkce umožňuje vybrání tří způsobů, jak převrácené trojúhelníky opravit (Obr. 5.12). Jako první byla použita možnost Relax/Clean, která se snaží postupně opravovat a posouvat vrcholy trojúhelníku tak, aby síť v okolí byla více plochá a hladká. Pokud po použití této funkce zůstaly stále některé trojúhelníky převráceny, byla použita funkce Defeature. Tato funkce odstraní převracené trojúhelníky a vzniklé díry v povrchu automaticky vyplní bez vyhlazování. V případě, že po použití těchto dvou způsobů stále zůstávají v povrchu převrácené trojúhelníky, provede se pouze jejich výběr funkcí Select Only. Tyto trojúhelníky zůstanou vybrané i po ukončení funkce na opravu převracených trojúhelníků a dojde k jejich odstrnění. Vzniklé díry v povrchu je třeba dále vyplnit pomocí dostupných nástrojů ve funkci Fill Holes. Tento postup byl uplatněn na každou ze 14 částí modelu objektu. Celkem bylo odstraněno cca 15 tisíc převrácených trojúhelníků. Obr Dialogové okno opravy převrácených trojúhelníků 41

41 Po provedení těchto oprav byly jednotlivé části modelu opět spojeny dohromady. Nejprve se spojily části v každém ze dvou hlavních souborů a až následně se spojily i tyto dva soubory dohromady. Spojení částí v rámci jednoho souboru bylo provedeno pomocí funkce Merge Polygon Objects. Postupně byly spojovány vždy dvě sousedící části modelu a vyplňovány případně vzniklé díry na spojích těchto částí. S postupným spojováním a narůstajícím množstvím zobrazovaných trojúhelníků v souboru byla práce s modelem pomalejší a komplikovanější. Program Geomagic Studio 10 v některých případech nezvládl takovéto množství trojúhelníků, byl nestabilní a prováděné operace (vyplňování děr, mazání a opravy převrácených trojúhelníků) byly pomalé a někdy ukončeny chybovým hlášením s následným přerušením programu bez možnosti uložení dat. Spojování jednotlivých částí tak bylo prováděno velice pomalu. Po sjednocení všech částí v obou souborech modelu, každá obsahovala cca 7 8 milionů trojúhelníků, vyplnění všech možných děr a opravení převrácených trojúhelníků byly do jednoho souboru importovány obě sloučené části modelu TOP.wrp a DOWN.wrp (Obr. 5.13). Obr Výsledný sloučený model objektu Sloučením obou souborů do jednoho bylo dále prakticky nemožné pracovat s celým modelem. Proto byl proveden pouze výběr příslušné části z celého povrchu 42

42 modelu v místech, kde na sebe obě spojované části doléhaly a dále byl zpracováván pouze tento výběr. Opět byly postupně vyplněny vzniklé díry v povrchu a opraveny převrácené trojúhelníky. U celého modelu nebylo možné nechat proběhnout funkci na opravu převrácených trojúhelníků, aplikace byla vždy ukončena po neznámé chybě. Lze ovšem předpokládat, že ani výsledný model nebude obsahovat tyto převrácené trojúhelníky, jelikož byly kontrolovány dílčí části během postupného spojování. V povrchu objektu zůstalo stále cca 50 děr, které nebylo možné vyplnit pro jejich velikost nebo komplikovanost. Z takto vyhotoveného modelu bylo pořízeno několik snímků pro prezentační účely, které jsou součástí přílohy na CD. V zobrazení modelu bylo vypnuto jeho ohraničení a ohraničení zbývajících děr v povrchu. Rozlišení pořizovaných snímků bylo nastaveno na 5000 pixelů. Na snímky byly zachyceny detaily oken i celkový pohled na model z různých úhlů. Pro možnost případného 3D tisku výsledného modelu byl ještě snížen počet trojúhelníků pomocí funkce Decimate Polygon. Snížení bylo provedeno o 50 % se zachováním maximální křivosti, ostatní parametry nebyly použity. Obr Dialogové okno snižování počtu trojúhelníků 43
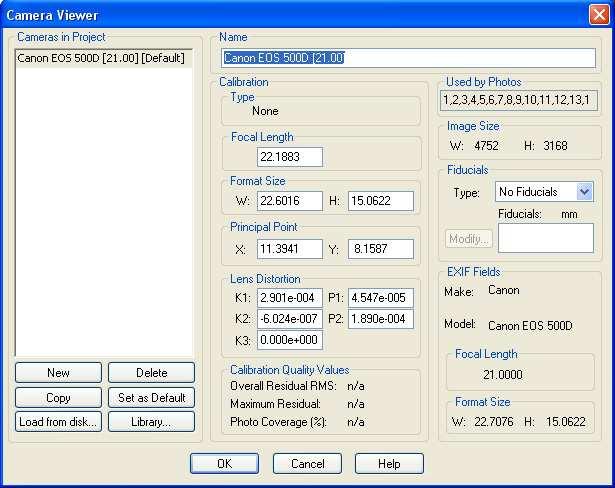
43 5.3 Pokrytí modelu texturami Abychom mohli pokrýt vytvořený model texturami, byly na každém stanovisku pořízeny snímky ve vysokém rozlišení (4752 x 3168 pixelů). Snímkování provedl vedoucí diplomové práce Ing. Bronislav Koska, Ph.D. fotoaparátem Canon EOS 500D. Z celkového množství cca 230 pořízených snímků z jednotlivých stanovisek bylo pro vlastní texturování použito jen 170 snímků. Nepoužité snímky byly neostré, případně zachycovaly nezaměřenou část objektu. Během snímkování došlo několikrát ke změně nastavené ohniskové vzdálenosti na objektivu. Ze souboru dále použitých snímků byly snímky pořízeny s ohniskovou vzdáleností f = 22 mm, snímky byly pořízeny s ohniskovou vzdáleností f = 21 mm a snímky 30 34, a byly pořízeny s ohniskovou vzdáleností f = 18 mm Kalibrace kamery Pro zjištění prvků vnitřní orientace kamery s nastavenou ohniskovou vzdáleností objektivu bylo třeba provést její kalibraci. Tyto prvky vnitřní orientace bylo třeba určit pro pozdější projektivní transformaci snímků a modelu objektu. V laboratoři fotogrammetrie bylo kamerou nafoceno kalibrační pole podle předem stanoveného postupu. Celkem bylo pořízeno 12 snímků kalibračního pole, třikrát z každé ze čtyř stran se současným otáčením kamery o 90. Úhel, pod kterým bylo pole foceno, byl cca 45. Takto bylo nafoceno kalibrační pole s nastavením ohniskové vzdálenosti f = 18 mm a f = 22 mm. Další zpracování kalibrace proběhlo v programu PhotoModeler Scanner 6. Tento program umožňuje založit projekt kalibrace kamery a následně provést její automatickou kalibraci. Po vybrání příslušných snímků kalibračního pole bylo možné spustit proces kalibrace. Nastavené parametry kalibrace zůstaly beze změny (Obr. 5.15). Takto byly určeny všechny prvky vnitřní orientace kamery s nastavenou ohniskovou vzdáleností objektivu f = 18 mm a f = 22 mm. Výsledné hodnoty a protokoly z kalibrace jsou součástí přílohy na CD. 44

44 Obr Nastavení parametrů automatické kalibrace kamery Jelikož nebyly pořízeny snímky kalibračního pole s nastavenou ohniskovou vzdálenosti objektivu f = 21 mm, byly hodnoty jednotlivých prvků vnitřní orientace určeny lineární interpolací pomocí rozdílů mezi jednotlivými prvky vnitřní orientace určených kalibrací pro f = 18 mm a f = 22 mm. Přesná hodnota ohniskové vzdálenosti nebyla známa, a tak po konzultaci s vedoucím diplomové práce byla za správnou zvolena hodnota určená kalibrací pro f = 22 mm ale zmenšená o 1 mm. Pomocí této hodnoty ohniskové vzdálenosti bylo možné určit poměr rozdílů mezi jednotlivými ohniskovými vzdálenostmi a následně pak interpolovat ostatní parametry. Hodnoty určovaných prvků vnitřní orientace jsou uvedeny v Tab
45 Tab. 5.1 Určené prvky vnitřní orientace kamery Hodnoty parametrů Nastavení f na objektivu Způsob určení kalibrace kalibrace interpolace Ohnisková vzdálenost [mm] 18, , , Hlavní bod [mm] Xp 11, , , Yp 8, , , Velikost snímače [mm] Fw (šířka) 22, , , Fh (výška) 15, , ,0622 Zkreslení objektivu K1 4,8230*10-4 2,3310*10-4 2,90109*10-4 K2-1,021* ,48* ,602376*10-6 K P1 4,525*10-5 4,554*10-5 4,547*10-5 P2 2,1530*10-4 1,8120*10-4 1,8900* Idealizace použitých snímků Pořízené snímky obsahují vady a je třeba provést jejich idealizaci, tedy převod reálných snímků do ideální formy. Idealizované snímky již nemají zkreslení objektivu, mají čtvercové pixely a vycentrovaný hlavní bod. Po provedení idealizace je vytvořen nový kalibrační protokol obsahující určované prvky vnitřní orientace idealizované kamery. V Tab. 5.2 jsou uvedeny příslušné idealizované prvky vnitřní orientace kamery pro jednotlivá nastavení objektivu. Tab. 5.2 Idealizované prvky vnitřní orientace kamery Hodnoty parametrů Nastavení f na objektivu Ohnisková vzdálenost [mm] 18, , ,1883 Hlavní bod [mm] Xp 12, , ,75 Yp 8,6501 8,4539 8,4991 Velikost snímače [mm] Fw (šířka) 25,953 25, ,4999 Fh (výška) 17, , ,
.")
46 Vlastní proces idealizace byl proveden v programu PhotoModeler Scanner 6 pomocí příslušného nástroje Idealize Project. Jednotlivé skupiny snímků byly postupně idealizovány a určené prvky vnitřní orientace uloženy do projektu. Dialogové okno idealizace snímků obsahuje dvě možnosti nastavení (Obr. 5.16). První hodnota nastavuje počet snímků, které budou současně načteny a převzorkovány. Čím vyšší počet načítaných snímků, tím rychleji proběhne celý proces idealizace, ovšem za cenu vyšších nároků na spotřebu dočasné paměti počítače. V případě zadání příliš vysokého počtu najednou zpracovávaných snímků může mít proces idealizace nedostatek paměti počítače pro zpracování. Po idealizaci načtených snímků je program uloží, zavře a načte do paměti další skupinu snímků. V druhé části je možné vybrat celou sadu snímků na zpracování nebo pouze ty snímky, jejichž idealizaci je třeba provést. Po provedení idealizace byly názvy zpracovávaných snímků doplněny o označní _idealized na konci názvu snímku, původní snímky nebyly nijak modifikovány. Idealizované snímky jsou součástí přílohy na CD. Obr Dialogové okno idealizace snímků Transformace snímků Jelikož nebyla známa přesná poloha kamery v okamžiku snímkování potřebná pro projekci textur na model objektu, bylo nutné provést transformaci snímků na model. Pro transformaci 2D snímkových souřadnic a 3D prostorových souřadnic byla použita projektivní transformace. Odečítání snímkových souřadnic na jednotlivých snímcích bylo provedeno v programu PhotoModeler Scanner 6, odečítání prostorových souřadnic 47


47 modelu bylo provedeno v programu Geomagic Studio 10. Jak na snímcích, tak na modelu bylo vybíráno 5 identických bodů. Jak bylo uvedeno výše, snímkové souřadnice byly odečítány v programu PhotoModeler Scanner 6, kde byl založen nový projekt, do kterého byly načteny zpracovávané snímky. Na každém z použitých idealizovaných snímků byly vybrány jednotlivé identické body a jejich snímkové souřadnice byly zobrazeny v příslušné tabulce (Obr. 5.17). Tato tabulka obsahovala pouze číslo bodu a 2D souřadnice bodu x a y. Vybírány byly především body jasně identifikovatelné i na prostorovém modelu objektu jako jsou rohy oken, zdí a výklenků, ostré rohy cihel a vystouplých kamenů, některé části ozdobných prvků v oknech, ale i dobře rozpoznatelné pukliny, díry a jiné části rozpadající se omítky. Rozložení identických bodů bylo voleno rovnoměrně tak, aby pokrylo celou plochu snímku ideálně v jedné rovině, například na celé zdi. V některých případech, s ohledem na obtížnost určení jednotlivých identických bodů, toto nebylo dodrženo. Obr Výběr identických bodů na snímku Všechny snímkové souřadnice určených bodů byly v pixelech. Pro další použití do výpočtu projektivní transformace bylo třeba získané snímkové souřadnice přepočítat na milimetry. Souřadnice byly překopírovány do tabulky v programu Excel a následně 48


48 přepočteny. Tento převod byl určen na základě poměru mezi velikostí snímače kamery v milimetrech a rozměrem snímku v pixelech. Tímto vztahem byla určena velikost jednoho pixelu jak v horizontálním, tak ve vertikálním směru v požadovaných jednotkách milimetrech. Převod souřadnic je součástí přílohy na CD. Prostorové souřadnice vstupující do projektivní transformace byly odečítány v programu Geomagic Studio 10. Pro usnadnění manipulace byl použit model objektu, který měl o 50% snížený počet trojúhelníků, přesto byl dostatečně podrobný pro identifikaci a výběr identických bodů. Souřadnice byly odečítány přes funkci Create Datums, pomocí které byl na povrchu modelu vytvořen bodový prvek se souřadnicemi X, Y a Z v souřadnicovém systému modelu objektu. Takto určené souřadnice byly v metrech s přesností na 3 desetinná čísla. Obr Výběr identických bodů na modelu Výběr jednotlivých identických bodů byl obtížnější, než se zpočátku zdál. Identifikace bodů na snímku a na modelu musela probíhat současně, aby byla zaručena správnost a posloupnost výběru. Přesnost výběru ovlivňovala vzdálenost kamery od objektu. S rostoucí vzdáleností přesnost klesala, jelikož se zvětšovala plocha objektu, kterou reprezentovala velikost pixelu na snímku. Na snímcích zachycujících zeď 49
49 připojenou k hlavnímu objektu, která byla tvořena obnaženými kameny, byla identifikace bodů ztížena právě tímto typem povrchu bez záchytných bodů. Vystupující kameny se nejevily jako vhodné identické body, jelikož bylo komplikované je přesně nalézt v modelu a identifikovat vybrané místo na snímku. Dalším obtížným krokem bylo vybírat body na pořízených detailních snímcích vnitřních prostor malé místnosti, která je součástí hlavní části objektu. Při takto velkém detailu bylo velice komplikované a pracné správně identifikovat jednotlivé body mezi snímkem a modelem. Také nedokonalosti ve vytvořeném povrchu modelu ztěžovaly výběr identických bodů. Vlastní transformace byla provedena v programu alltran_console_1_01, pomocí kterého byla postupně provedena transformace všech snímků. Pro správnost matematické orientace os u snímkových souřadnic vstupujících do vypočtu transformace bylo třeba změnit znaménka u souřadnic y. Postupem uvedeným v této kapitole byly odečteny souřadnice identických bodů na jednom snímku a zapsány do vstupního souboru input.txt. Struktura vstupního souboru je patrná níže. Hlavička obsahovala typ transformace a konstanty z kalibrace kamery (souřadnice hlavního bodu, ohnisková vzdálenost). Vlastní tělo souboru obsahovalo dva typy souřadnic global_points a local_points. Souřadnice v časti global_points jsou snímkové souřadnice x, y a v části local points jsou prostorové souřadnice modelu X, Y, Z. projective no_points constants global_points local_points Obr Ukázka vstupního souboru 50
50 Tímto způsobem byl vytvořen vstupní soubor pro každý snímek. Celkem bylo vytvořeno 170 souborů. Po spuštění programu transformace alltran_console.exe byl vytvořen výstupní soubor key_report.txt, který obsahoval výsledné parametry transformace potřebné pro projekci textur na model. Takto byly postupně vytvořeny výstupní soubory transformace pro všechny snímky. Ukázka výstupního souboru je součástí Přílohy 5. 51
51 6 ZÁVĚR Hlavním cílem této diplomové práce bylo zaměření a vytvoření 3D modelu vybrané zříceniny hradu Dražice, tedy zachycení jejího současného stavu. Použita byla metoda laserového skenování, která umožnila rychlé a dostatečně přesné pořízení dat ke zpracování. Oproti tomu kancelářské práce zabraly mnohem více času ve srovnání s časem stráveným samotným měřením v terénu. Bylo také třeba řešit některé problémy spojené s rozsáhlostí pořízených dat. V programu Leica Cyclone jsem provedl počáteční registraci získaných mračen bodů z měření v terénu a částečně data očistil od oblastí ležících mimo objekt zříceniny hradu. Upravená mračna bodů jsem exportoval do textových souborů pro jejich další zpracování. Následující tvorbu modelu jsem provedl v programu Geomagic Studio, kde byl po jednotlivých krocích vytvořen povrch modelu jako trojúhelníková síť mezi body mračna. Povrch modelu zříceniny jsem dále zpracovával a odstranil jeho nedostatky v podobě převrácených trojúhelníků a děr vzniklých při procesu tvorby. V tomto kroku bylo velmi komplikované pracovat s celým modelem najednou, jelikož byl tvořen přibližně 15 miliony trojúhelníků. Program nezvládal takové množství dat a byl nestabilní. Proto jsem model rozdělil do několika částí, a ty zpracoval samostatně. Nakonec jsem tyto části spojil do výsledné podoby modelu zříceniny hradu. Soubor s vytvořeným modelem ve formátu *.wrp je součástí přílohy na CD a jeho snímky jsou obsahem Přílohy 5. Poslední fází tvorby modelu bylo jeho texturování. Přestože nebyl tento krok součástí zadání, pro věrohodnější zachycení stavu zříceniny byl shledán jako vhodný, jelikož tak model získá barevnou vypovídající podobu. Při měření v terénu pořídil Ing. Bronislav Kostka, Ph.D. snímky objektu, které byly použity jako textury. Tyto snímky jsem dále zpracoval, transformoval a připravil jako podklad pro texturování modelu. V době odevzdání diplomové práce do tisku však nebyl software pro výpočet textur Ing. Bronislavem Kostkou, Ph.D. ještě dokončen. Připravené snímky a jejich transformační protokoly jsou součástí přílohy na CD. 52
52 Obr. 6.1 Snímek vytvořeného modelu zříceniny hradu Dražice Výsledný detailní model zříceniny hradu je vyhodnocený se střední vzdáleností bodů 2,5 cm mimo vybrané detaily. Tyto detaily (okna, klenby, komíny, atd.) jsou vyhodnoceny se střední vzdáleností bodů 1 cm. Model stále obsahuje 60 děr, které pro svoji velikost a složitost nebylo možné vyplnit. Jedná se především o horní plochy zdí a oken, tyto části byly pro skener skryté. Jednou z možností, jak doplnit chybějící části povrchu a získat tak kompletní uzavřený model objektu, by bylo provedení leteckého snímkování z modelu letadla a z takto získaných snímků vyhodnotit nepřístupné části. Hustota bodů by nebyla tak vysoká jako z měření laserovým skenerem, ale dostatečná pro uzavření povrchu modelu. Takto doplněný a uzavřený model by bylo možné, po přidání chybějících textur, vytisknout na 3D tiskárně a použít pro prezentační účely. 53
53 Seznam literatury [1] KAŠPAR, Milan, et al. Laserové skenovací systémy ve stavebnictví. První vydání. Hradec Králové : Vega s.r.o., s. ISBN [2] ŠTRONER, Martin; POSPÍŠIL, Jiří. Terestrické skenovací systémy. Vydání první. Praha : ČVUT, s. ISBN [3] POSPÍŠIL, Jiří. Laserové skenování [online] [cit ]. Dostupné z WWW: < [4] Stavebnictví a interiér [online] [cit ]. Dostupné z WWW: < [5] Leica Geosystems HDS : Leica HDS3000 [online]. c2011 [cit ]. Dostupné z WWW: < [6] Leica Geosystems HDS : HDS Accessories [online]. c2011 [cit ]. Dostupné z WWW: < Accessories_19098.htm>. [7] Leica HDS3000 Versatile, high-accuracy 3D laser scanner [online] [cit ]. Dostupné z WWW: < Leica_HDS3000.pdf>. [8] Leica HDS3000 The Industry Standard for High-Definition Surveying [online] [cit ]. Dostupné z WWW: < PDFs/hds3000.pdf>. [9] Hrad Dražice [online] [cit ]. Dostupné z WWW: < 54
54 [10] Hrady v Čechách, na Moravě a ve Slezsku [online] [cit ]. Dostupné z WWW: < [11] Hrady.cz : Hrad Dražice [online] [cit ]. Dostupné z WWW: < [12] GEFOS : Cyclone [online] [cit ]. Dostupné z WWW: < [13] 3D skenování : Geomagic [online] [cit ]. Dostupné z WWW: < [14] KOSKA, Bronislav. Projekt Vytvoření modelu sochy [online]. [s.l.] : [s.n.], 2008 [cit ]. Dostupné z WWW: < vyuka/ostatni/navod_socha.pdf>. [15] POSPÍŠILOVÁ, Jana. Vytvoření modelu sochy Berana. [s.l.] : [s.n.], s. 55
55 Seznam obrázků Obr. 1.1 Zřícenina hradu Dražice Obr. 2.1 Rozdělení skenerů Obr. 2.2 Skener se základnou jednokamerový Obr. 2.3 Skener se základnou dvoukamerový Obr. 2.4 Kamerový a panoramatický skener Obr. 2.5 Princip měření délky elektronickým dálkoměrem Obr. 2.6 Princip měření délky optoelektronicky Obr. 2.7 Rozmítání svazku rotujícím zrcadlem Obr. 2.8 Rozmítání svazku odrazným hranolem Obr. 2.9 Rozmítání svazku rotací zdroje záření Obr Rozmítání svazku optickými vlákny Obr Rozmítání svazku statickým optickým elementem Obr. 3.1 Kresba zříceniny hradu Dražice Obr. 4.1 Lokalita obce Dražice Obr. 4.2 Letecký snímek zříceniny hradu Dražice Obr. 4.3 Leica HDS 3000 Obr. 4.4 Stativ s rychloupínáním a otočné odrazné terče Obr. 4.5 Menu programu Cyclone při skenování Obr. 4.6 Schematické znázornění volby stanovisek Obr. 5.1 Menu programu Cyclone Obr. 5.2 Modul registrace Obr. 5.3 Očištěné mračno bodů Obr. 5.4 Menu programu Geomagic Studio 10 a importované mračno bodů Obr. 5.5 Globální registrace Obr. 5.6 Očištěné mračno bodů Obr. 5.7 Redukce šumu Obr. 5.8 Vybrané detaily oken Obr. 5.9 Tvorba povrchu Obr Vytvořený povrch objektu Obr Dialogové okno vyplňování děr Obr Dialogové okno opravy převrácených trojúhelníků Obr Výsledný sloučený model objektu 56
56 Obr Obr Obr Obr Obr Obr Obr. 6.1 Dialogové okno snižování počtu trojúhelníků Nastavení parametrů automatické kalibrace kamery Dialogové okno idealizace snímků Výběr identických bodů na snímku Výběr identických bodů na modelu Ukázka vstupního souboru Snímek vytvořeného modelu zříceniny hradu Dražice 57
57 Seznam tabulek Tab. 4.1 Tab. 4.2 Tab. 4.3 Tab. 5.1 Tab. 5.2 Leica HDS 3000 technické parametry Vlícovací body Stanoviska a jednotlivé hustoty skenování objektu Určené prvky vnitřní orientace kamery Idealizované prvky vnitřní orientace kamery 58
58 Seznam příloh Příloha 1: Schematický náčrt rozmístění stanovisek a vlícovacích bodů Příloha 2: Protokol registrace mračna bodů v programu Cyclone 6.0 Příloha 3: Parametry kalibrací kamery jednotlivých nastavení objektivu (f = 18, 22 a 21 mm) v programu PhotoModeler Scanner Příloha 4: Ukázkový protokol z projektivní transformace Příloha 5: Snímky výsledného modelu Přílohy na CD Příloha a: Příloha b: Příloha c: Příloha d: Příloha e: Příloha f: Příloha g: Příloha h: Exportované mračno bodů z programu Cyclone Snímky modelu z programu Geomagic Snímky kalibračního pole Protokoly kalibrace kamery Idealizované snímky Přepočet snímkových souřadnic Vstupní a výstupní soubory projektivní transformace Výsledný model objektu v programu Geomagic 59
59 Příloha 1: Schematický náčrt rozmístění stanovisek a vlícovacích bodů 60
60
61 Příloha 2: Protokol registrace mračna bodů v programu Cyclone
62 Status: VALID Registration Mean Absolute Error: for Enabled Constraints = m for Disabled Constraints = m Date: :18:44 Database name : drazice ScanWorlds ScanWorld 1 (Leveled) ScanWorld 2 ScanWorld 5 ScanWorld 6 ScanWorld 7 ScanWorld 9 ScanWorld 8 ScanWorld 10 ScanWorld 3 ScanWorld 4 Constraints Name ScanWorld ScanWorld Type On/Off Weight Error Error Vector Horz Vert TargetID: 2 ScanWorld 1 (Leveled) ScanWorld 2 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 1 (Leveled) ScanWorld 2 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 1 (Leveled) ScanWorld 5 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 1 (Leveled) ScanWorld 5 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 1 (Leveled) ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 1 (Leveled) ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 1 (Leveled) ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 1 (Leveled) ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m 63
63 TargetID: 2 ScanWorld 2 ScanWorld 5 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 2 ScanWorld 5 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 2 ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 2 ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 2 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 12 ScanWorld 2 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 2 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 4 ScanWorld 2 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 5 ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 5 ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 8 ScanWorld 5 ScanWorld 6 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 7 ScanWorld 5 ScanWorld 7 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 8 ScanWorld 5 ScanWorld 7 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 5 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 1 ScanWorld 5 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 8 ScanWorld 6 ScanWorld 7 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 11 ScanWorld 6 ScanWorld 7 Coincident: Vertex-Vertex On m ( , , ) m m m 64
64 TargetID: 1 ScanWorld 6 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 2 ScanWorld 6 ScanWorld 9 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 4 ScanWorld 2 ScanWorld 8 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 11 ScanWorld 6 ScanWorld 8 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 11 ScanWorld 7 ScanWorld 8 Coincident: Vertex-Vertex On m ( , , ) m m m TargetID: 4 ScanWorld 9 ScanWorld 8 Coincident: Vertex-Vertex On m ( , , ) m m m Cloud/Mesh 1 ScanWorld 7 ScanWorld 8 Cloud: Cloud/Mesh-Cloud/Mesh On m aligned/underconstrained [ m] Cloud/Mesh 2 ScanWorld 5 ScanWorld 10 Cloud: Cloud/Mesh-Cloud/Mesh On m aligned/underconstrained [ m] Cloud/Mesh 3 ScanWorld 1 (Leveled) ScanWorld 3 Cloud: Cloud/Mesh-Cloud/Mesh On m aligned/underconstrained [ m] Cloud/Mesh 4 ScanWorld 3 ScanWorld 4 Cloud: Cloud/Mesh-Cloud/Mesh On m aligned/underconstrained [ m] Cloud/Mesh 5 ScanWorld 1 (Leveled) ScanWorld 2 Cloud: Cloud/Mesh-Cloud/Mesh On m aligned/underconstrained [ m] Cloud/Mesh 1 [ScanWorld 7 : ScanWorld 8] Objective Function Value: e-005 sq m Iterations: 6 Overlap Point Count: Overlap Error Statistics RMS: m AVG: m MIN: e-007 m MAX: m Overlap Center: ( , , ) m Error after global registration: e-006 sq m Translation: (8.0674, , ) m Rotation: (0.0022, , ): deg Cloud/Mesh 2 [ScanWorld 5 : ScanWorld 10] Objective Function Value: e-005 sq m Iterations: 24 Overlap Point Count: Overlap Error Statistics RMS: m 65
65 AVG: m MIN: e-007 m MAX: m Overlap Center: (3.8795, , ) m Error after global registration: e-020 sq m Translation: ( , , ) m Rotation: (0.0022, , ): deg Cloud/Mesh 3 [ScanWorld 1 (Leveled) : ScanWorld 3] Objective Function Value: e-005 sq m Iterations: 41 Overlap Point Count: 4509 Overlap Error Statistics RMS: m AVG: m MIN: e-006 m MAX: m Overlap Center: (0.1946, , ) m Error after global registration: e-032 sq m Translation: (2.3392, , ) m Rotation: ( , , ): deg Cloud/Mesh 4 [ScanWorld 3 : ScanWorld 4] Objective Function Value: e-005 sq m Iterations: 32 Overlap Point Count: 4464 Overlap Error Statistics RMS: m AVG: m MIN: e-006 m MAX: m Overlap Center: ( , , ) m Error after global registration: e-031 sq m Translation: ( , , ) m Rotation: ( , , ): deg Cloud/Mesh 5 [ScanWorld 1 (Leveled) : ScanWorld 2] Objective Function Value: e-005 sq m Iterations: 100 Overlap Point Count: Overlap Error Statistics RMS: m AVG: m MIN: e-007 m MAX: m Overlap Center: ( , , ) m Error after global registration: e-006 sq m Translation: ( , , ) m Rotation: (0.0024, , ): deg ScanWorld Transformations ScanWorld 1 (Leveled) translation: (0.0000, , ) m rotation: (0.0000, , ):0.000 deg 66
66 ScanWorld 2 translation: ( , , ) m rotation: (0.0028, , ): deg ScanWorld 5 translation: ( , , ) m rotation: ( , , ): deg ScanWorld 6 translation: ( , , ) m rotation: ( , , ): deg ScanWorld 7 translation: (5.3656, , ) m rotation: ( , , ): deg ScanWorld 9 translation: ( , , ) m rotation: (0.0026, , ): deg ScanWorld 8 translation: ( , , ) m rotation: (0.0028, , ): deg ScanWorld 10 translation: ( , , ) m rotation: (0.0023, , ): deg ScanWorld 3 translation: (2.3392, , ) m rotation: (0.0209, , ): deg ScanWorld 4 translation: (0.7134, , ) m rotation: (0.0319, , ): deg Unused ControlSpace Objects ScanWorld 1 (Leveled): Vertex : TargetID : 3 ScanWorld 6: Vertex : TargetID : 9 Vertex : TargetID : 10 ScanWorld 10: Vertex : TargetID : 1 Vertex : TargetID : 1 67
67 Příloha 3: Parametry kalibrací kamery jednotlivých nastavení objektivu (f = 18, 22 a 21 mm) v programu PhotoModeler Scanner 68


68 69
69 70
70 Příloha 4: Ukázkový protokol z projektivní transformace 71
71 projective The equation of projective is: x = x0 - f*(r11*(x-x0)+r12*(y-y0)+r13*(z-z0))/(r31*(x-x0)+r32*(y-y0)+r33*(z-z0)) y = y0 - f*(r21*(x-x0)+r22*(y-y0)+r23*(z-z0))/(r31*(x-x0)+r32*(y-y0)+r33*(z-z0)) Computed parameters are (in order r11, r12,..., r32, r33, X0, Y0, Z0, x0, y0, f) (Numbers smaller than 1e-50 will be displayed as "0") Number of identical points is: 5 Standard deviation a posteriori is (sqrt([vv]/number_of_redundant_points)): Standard deviation a posteriori in coordinates is (sqrt([vv]/number_of_redundant_coordinates)): Number of iterations is: 6 Used solution algorithm: Gauss-Jordan elimination The sum of normal equations absolute residuals: e-015 The condition number is: Maximal correlation is: between parameters: 3 9 Correlation matrix:
72 Residuals:
73 Příloha 5: Snímky výsledného modelu 74


74 75


75 76






76 77






77 78





78 79
Laserové skenování (1)
") (1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
(1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
Terestrické 3D skenování
 Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Zaměření vybraných typů nerovností vozovek metodou laserového skenování
 Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Pozemní laserové skenování. Doc. Ing. Vlastimil Hanzl, CSc.
 Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Srovnání možností zaměření a vyhodnocení historické fasády
 Srovnání možností zaměření a vyhodnocení historické fasády Ing. Bronislav Koska, Ing. Tomáš Křemen, Doc. Ing. Jiří Pospíšil, CSc. Katedra speciální geodézie Fakulta stavební České vysoké učení technické
Srovnání možností zaměření a vyhodnocení historické fasády Ing. Bronislav Koska, Ing. Tomáš Křemen, Doc. Ing. Jiří Pospíšil, CSc. Katedra speciální geodézie Fakulta stavební České vysoké učení technické
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY LASEROVÉ SKENOVACÍ SYSTÉMY Laserové skenování LIDAR - z angl. Light Detection And Ranging v současnosti jedna z
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY LASEROVÉ SKENOVACÍ SYSTÉMY Laserové skenování LIDAR - z angl. Light Detection And Ranging v současnosti jedna z
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie
 Základy automatizace v IG - 154YZAG Návod na cvičení: Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie Ing. B. Koska 21. 11. 2008 Výpočet objemové bilance a rozdílového
Základy automatizace v IG - 154YZAG Návod na cvičení: Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie Ing. B. Koska 21. 11. 2008 Výpočet objemové bilance a rozdílového
Návod k použití softwaru Solar Viewer 3D
 Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách
 zákona č. 137/2006 Sb., o veřejných zakázkách") Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
Vytvoření modelu sochy
 Laserové skenování Návod na cvičení: Projekt Vytvoření modelu sochy Ing. B. Koska Vytvoření modelu sochy 1. Zadání Proveďte zaměření nepravidelného objektu sochy s využitím laserového skenovacího systému.
Laserové skenování Návod na cvičení: Projekt Vytvoření modelu sochy Ing. B. Koska Vytvoření modelu sochy 1. Zadání Proveďte zaměření nepravidelného objektu sochy s využitím laserového skenovacího systému.
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Seznámení s moderní přístrojovou technikou Laserové skenování
 Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Moderní trendy měření Radomil Sikora
 Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
NP Podyjí, etapa 2012 Kuda, František 2012 Dostupný z
 Tento dokument byl stažen z Národního úložiště šedé literatury (NUŠL). Datum stažení: 22.01.2017 Technická zpráva z Pozemního laserového skenování na lokalitě Ledové sluje, NP Podyjí, etapa 2012 Kuda,
Tento dokument byl stažen z Národního úložiště šedé literatury (NUŠL). Datum stažení: 22.01.2017 Technická zpráva z Pozemního laserového skenování na lokalitě Ledové sluje, NP Podyjí, etapa 2012 Kuda,
Určení svislosti. Ing. Zuzana Matochová
 Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
Měřická dokumentace používané metody
 Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Zaměření a vyhotovení polohopisného a výškopisného plánu (tachymetrie)
") Zaměření a vyhotovení polohopisného a výškopisného plánu (tachymetrie) Braun J., Třasák P. - 2012 1. Převzetí podkladů pro tvorbu plánu od investora Informace o zaměřovaném území (vymezení lokality) Účel
Zaměření a vyhotovení polohopisného a výškopisného plánu (tachymetrie) Braun J., Třasák P. - 2012 1. Převzetí podkladů pro tvorbu plánu od investora Informace o zaměřovaném území (vymezení lokality) Účel
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP
 SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
3D laserové skenování Silniční stavitelství. Aplikace
 3D laserové skenování Silniční stavitelství Aplikace Využití technologie 3D laserového skenování v silničním stavitelství Je tomu již více než deset let, kdy se v USA začala využívat technologie laserového
3D laserové skenování Silniční stavitelství Aplikace Využití technologie 3D laserového skenování v silničním stavitelství Je tomu již více než deset let, kdy se v USA začala využívat technologie laserového
Návod pro obnovu katastrálního operátu a převod
 Český úřad zeměměřický a katastrální Návod pro obnovu katastrálního operátu a převod Dodatek č. 3 Praha 2013 Zpracoval: Český úřad zeměměřický a katastrální Schválil: Ing. Karel Štencel, místopředseda
Český úřad zeměměřický a katastrální Návod pro obnovu katastrálního operátu a převod Dodatek č. 3 Praha 2013 Zpracoval: Český úřad zeměměřický a katastrální Schválil: Ing. Karel Štencel, místopředseda
Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D.
 Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D. Projekt (TB02CUZK002 - Integrace nové techniky a technologie do procesu obnovy katastrálního Hlavní části projektu: Moderní měřické aparatury
Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D. Projekt (TB02CUZK002 - Integrace nové techniky a technologie do procesu obnovy katastrálního Hlavní části projektu: Moderní měřické aparatury
Testování programu PhotoScan pro tvorbu 3D modelů objektů. Ing. Tomáš Jiroušek
 Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Digitální fotogrammetrie
 Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
57. Pořízení snímku pro fotogrammetrické metody
 57. Pořízení snímku pro fotogrammetrické metody Zpracoval: Tomáš Kobližek, 2014 Z{kladní informace Letecká fotogrammetrie nad 300 m výšky letu nad terénem (snímkovací vzdálenosti) Uplatnění mapování ve
57. Pořízení snímku pro fotogrammetrické metody Zpracoval: Tomáš Kobližek, 2014 Z{kladní informace Letecká fotogrammetrie nad 300 m výšky letu nad terénem (snímkovací vzdálenosti) Uplatnění mapování ve
DIGITÁLNÍ ORTOFOTO. SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník
 DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
T a c h y m e t r i e
 T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství. Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ. VOŠ a SŠS Vysoké Mýto leden 2008
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Pořizování 3D elementů v Marushka Designu
 0 Pořizování 3D elementů v Marushka Designu OBSAH 1 CÍL PŘÍKLADU...2 2 PRÁCE S PŘÍKLADEM...2 3 UKÁZKA DIALOGOVÉHO OKNA...3 4 STRUČNÝ POPIS PŘÍKLADU V MARUSHKA DESIGNU...6-1 - 1 Cíl příkladu V tomto příkladu
0 Pořizování 3D elementů v Marushka Designu OBSAH 1 CÍL PŘÍKLADU...2 2 PRÁCE S PŘÍKLADEM...2 3 UKÁZKA DIALOGOVÉHO OKNA...3 4 STRUČNÝ POPIS PŘÍKLADU V MARUSHKA DESIGNU...6-1 - 1 Cíl příkladu V tomto příkladu
Seznámení s moderní přístrojovou technikou Totální stanice a digitální nivelační přístroje
 Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Tachymetrie (Podrobné měření výškopisu)
") Tachymetrie (Podrobné měření výškopisu) Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_8). Pro jeho vytvoření je potřeba znát polohu a výšku vhodně zvolených
Tachymetrie (Podrobné měření výškopisu) Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_8). Pro jeho vytvoření je potřeba znát polohu a výšku vhodně zvolených
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny
 Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
ení tvaru a polohy laserového svazku
 Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
Bezkontaktní měření Fotogrammetrie v automotive
 Bezkontaktní měření Fotogrammetrie v automotive Ing. Jaroslav Kopřiva Konferencia Združenia slovenských laboratórií a skúšobní, Hotel Stupka, Tále I 3.5 5.5. 2017 Využití fotogrammetrie v automotive zkušebnictví
Bezkontaktní měření Fotogrammetrie v automotive Ing. Jaroslav Kopřiva Konferencia Združenia slovenských laboratórií a skúšobní, Hotel Stupka, Tále I 3.5 5.5. 2017 Využití fotogrammetrie v automotive zkušebnictví
Airborne Laser Scanning (ASL) - LIDAR (light detection and ranging)
 - LIDAR (light detection and ranging)") Airborne Laser Scanning (ASL) - LIDAR (light detection and ranging) Základní komponenty: laserový skener navigační systém (GPS) a INS. laserové paprsky časový interval mezi vysláním a přijetím paprskem
Airborne Laser Scanning (ASL) - LIDAR (light detection and ranging) Základní komponenty: laserový skener navigační systém (GPS) a INS. laserové paprsky časový interval mezi vysláním a přijetím paprskem
V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv.
 3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
DPZ10 Radar, lidar. Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava
 DPZ10 Radar, lidar Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava RADAR SRTM Shuttle Radar Topography Mission. Endeavour, 2000 Dobrovolný Hlavní anténa v nákladovém prostoru, 2. na stožáru
DPZ10 Radar, lidar Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava RADAR SRTM Shuttle Radar Topography Mission. Endeavour, 2000 Dobrovolný Hlavní anténa v nákladovém prostoru, 2. na stožáru
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE
 ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE
 ZÁKLADY FOTOGRAMMETRIE") SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA
 Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
Leica DISTO TM Laserové dálkoměry
 Leica DISTO TM Laserové dálkoměry Přesné, snadné a rychlé měření Měření s laserovým dálkoměrem Leica DISTO TM Rychle a efektivně Stiskněte tlačítko a během okamžiku se provede měření bez nutné účasti další
Leica DISTO TM Laserové dálkoměry Přesné, snadné a rychlé měření Měření s laserovým dálkoměrem Leica DISTO TM Rychle a efektivně Stiskněte tlačítko a během okamžiku se provede měření bez nutné účasti další
7. Určování výšek II.
 7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
Podrobné polohové bodové pole (1)
") Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání
Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání
OBSAH. Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení
 OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
GEODÉZIE II. Metody určov. Geometrická nivelace ze středu. vzdálenost
 Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
www.eurovia.cz PŘÍNOS KOMPLEXNÍHO VYUŽITÍ 3D PŘÍSTUPU PŘI REALIZACI REKONSTRUKCE VOZOVKY PŘÍPADOVÁ STUDIE Na společné cestě
 www.eurovia.cz PŘÍNOS KOMPLEXNÍHO VYUŽITÍ 3D PŘÍSTUPU PŘI REALIZACI REKONSTRUKCE VOZOVKY PŘÍPADOVÁ STUDIE Na společné cestě Investor: Hlavní město Praha zastoupené Technickou správou komunikací hl. m.
www.eurovia.cz PŘÍNOS KOMPLEXNÍHO VYUŽITÍ 3D PŘÍSTUPU PŘI REALIZACI REKONSTRUKCE VOZOVKY PŘÍPADOVÁ STUDIE Na společné cestě Investor: Hlavní město Praha zastoupené Technickou správou komunikací hl. m.
Spektrální charakteristiky
 Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Další metody v geodézii
 Další metody v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Fotogrammetrie Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za
Další metody v geodézii Globální navigační satelitní systémy (GNSS) 3D skenovací systémy Fotogrammetrie Globální navigační satelitní systémy (GNSS) Globální navigační satelitní systémy byly vyvinuty za
Práce s texty, Transformace rastru, Připojení GPS
 Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování
 Název diagnostiky: Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování Datum provedení: září 2012 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření
Název diagnostiky: Stanovení odtokových poměrů na vozovce a v jejím blízkém okolí metodou mobilního laserového skenování Datum provedení: září 2012 Provedl: Geovap, spol. s r. o. Stručný popis: Zaměření
NATIS s.r.o. Seifertova 4313/10 767 01 Kroměříž T:573 331 563 E:natis@natis.cz www.natis.cz. Videoendoskopy a příslušenství
 Videoendoskopy a příslušenství Strana 2 Úvod Jsme rádi, že vám můžeme představit katalog videoendoskopů a jejich příslušenství. Přenosné videoendoskopy model V55100 a X55100 s velkým barevným LCD displejem,
Videoendoskopy a příslušenství Strana 2 Úvod Jsme rádi, že vám můžeme představit katalog videoendoskopů a jejich příslušenství. Přenosné videoendoskopy model V55100 a X55100 s velkým barevným LCD displejem,
Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země
 Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země strana 2 Co je DPZ Dálkový průzkum je umění rozdělit svět na množství malých barevných čtverečků, se kterými si lze hrát na počítači a odhalovat jejich neuvěřitelný
Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země strana 2 Co je DPZ Dálkový průzkum je umění rozdělit svět na množství malých barevných čtverečků, se kterými si lze hrát na počítači a odhalovat jejich neuvěřitelný
VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ
 VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ Ing. B. Koska, Ph.D., Ing. J. Jon Katedra speciální geodézie Fakulta stavební České vysoké učení technické v Praze Telč Listopad 2014 Obsah Seznámení s projektem
VÝSLEDKYVÝVOJEAUTONOMNÍ MAPOVACÍVZDUCHOLODĚ Ing. B. Koska, Ph.D., Ing. J. Jon Katedra speciální geodézie Fakulta stavební České vysoké učení technické v Praze Telč Listopad 2014 Obsah Seznámení s projektem
Přehled vhodných metod georeferencování starých map
 Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
PODROBNÉ MĚŘENÍ POLOHOPISNÉ
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství MAPOVÉ PODKLADY Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 7. 4. 2017 PODROBNÉ MĚŘENÍ POLOHOPISNÉ
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství MAPOVÉ PODKLADY Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 7. 4. 2017 PODROBNÉ MĚŘENÍ POLOHOPISNÉ
Staré mapy TEMAP - elearning
 Staré mapy TEMAP - elearning Modul 5 Digitalizace glóbů Ing. Markéta Potůčková, Ph.D. 2015 Přírodovědecká fakulta UK v Praze Katedra aplikované geoinformatiky a kartografie Motivace Glóby vždy byly a jsou
Staré mapy TEMAP - elearning Modul 5 Digitalizace glóbů Ing. Markéta Potůčková, Ph.D. 2015 Přírodovědecká fakulta UK v Praze Katedra aplikované geoinformatiky a kartografie Motivace Glóby vždy byly a jsou
Leica 3D pozemní laserové skenery
 High Definition Surveying = HDS jsou u produktů firmy Leica Geosystems 3D laserové skenery a software k následnému zpracování dat. Přehled 3D laserových skenerů Leica Následující tabulka dává základní
High Definition Surveying = HDS jsou u produktů firmy Leica Geosystems 3D laserové skenery a software k následnému zpracování dat. Přehled 3D laserových skenerů Leica Následující tabulka dává základní
Digitalizace starých glóbů
 Milan Talich, Klára Ambrožová, Jan Havrlant, Ondřej Böhm Milan.Talich@vugtk.cz 21. kartografická konference, 3. 9. - 4. 9. 2015, Lednice Cíle Vytvoření věrného 3D modelu, umožnění studia online, možnost
Milan Talich, Klára Ambrožová, Jan Havrlant, Ondřej Böhm Milan.Talich@vugtk.cz 21. kartografická konference, 3. 9. - 4. 9. 2015, Lednice Cíle Vytvoření věrného 3D modelu, umožnění studia online, možnost
Výzkumný ústav geodetický, topografický a kartografický, v.v.i
 Výzkumný ústav geodetický, topografický a kartografický, v.v.i Zpráva o řešení úkolu za I. pololetí 2011 Výzkum uplatnění dat laserového skenování v katastru nemovitostí Červen 2011 Výzkumný ústav geodetický,
Výzkumný ústav geodetický, topografický a kartografický, v.v.i Zpráva o řešení úkolu za I. pololetí 2011 Výzkum uplatnění dat laserového skenování v katastru nemovitostí Červen 2011 Výzkumný ústav geodetický,
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Truss 4.7. Předvolby nastavení tisku
 Truss 4.7 Firma Fine s.r.o. připravila verzi 4.7 programu Truss. Tato verze přináší následující změny a vylepšení: Změna práce s násobnými vazníky Z důvodu omezení chyb v průběhu návrhu byl upraven způsob
Truss 4.7 Firma Fine s.r.o. připravila verzi 4.7 programu Truss. Tato verze přináší následující změny a vylepšení: Změna práce s násobnými vazníky Z důvodu omezení chyb v průběhu návrhu byl upraven způsob
Metodický pokyn. k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území
 Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
Zdroje dat GIS. Digitální formy tištěných map. Vstup dat do GISu:
 Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE
 VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE Obsah Úvod do fotogrammetrie Základy fotogrammetrie Rozdělení fotogrammetrie Letecká fotogrammetrie Úvod do fotogrammetrie
VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE Obsah Úvod do fotogrammetrie Základy fotogrammetrie Rozdělení fotogrammetrie Letecká fotogrammetrie Úvod do fotogrammetrie
Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty Ing. Jakab Barnabáš
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Anotace: Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Anotace: Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost
 Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence
Osnovy kurzů. pilotního projektu v rámci I. Etapy realizace SIPVZ. Systém dalšího vzdělávání veřejnosti. počítačová gramotnost
 Osnovy kurzů pilotního projektu v rámci I. Etapy realizace SIPVZ Systém dalšího vzdělávání veřejnosti počítačová gramotnost Začínáme s počítačem Úvod...5 Co je to počítač, informace, použití...10 Hlavní
Osnovy kurzů pilotního projektu v rámci I. Etapy realizace SIPVZ Systém dalšího vzdělávání veřejnosti počítačová gramotnost Začínáme s počítačem Úvod...5 Co je to počítač, informace, použití...10 Hlavní
První piloti, navigátoři a letečtí fotografové. Obsah přednášky: Moderní technologie v geodézii a jejich využití v KN
 Moderní technologie v geodézii a jejich využití v KN (1) Moderní technologie v geodézii a jejich využití v KN DPLS a integrace nových měřických postupů Ing. Václav Šafář, VÚGTK, v.v.i., v vaclav.safar@vugtk.cz
Moderní technologie v geodézii a jejich využití v KN (1) Moderní technologie v geodézii a jejich využití v KN DPLS a integrace nových měřických postupů Ing. Václav Šafář, VÚGTK, v.v.i., v vaclav.safar@vugtk.cz
Vyvinuté programové vybavení (projekt čís. TA02030806)
") Vyvinuté programové vybavení (projekt čís. TA02030806) 1.část programů Předzpracování dat Program sloužící k vytvoření Digitálního modelu reliéfu, povrchu a bezpečnostní hladiny, do formátu grid, s konstantním
Vyvinuté programové vybavení (projekt čís. TA02030806) 1.část programů Předzpracování dat Program sloužící k vytvoření Digitálního modelu reliéfu, povrchu a bezpečnostní hladiny, do formátu grid, s konstantním
Digitální model reliéfu (terénu) a analýzy modelů terénu
 a analýzy modelů terénu") Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
5.1 Definice, zákonné měřící jednotky.
 5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
obor bakalářského studijního programu Metrologie Prof. Ing. Jiří Pospíšil, CSc.
 obor bakalářského studijního programu Metrologie Prof. Ing. Jiří Pospíšil, CSc. *Studium je čtyřleté *Zaměřeno na zvládnutí základních principů metrologických činností a managementu kvality *Studium je
obor bakalářského studijního programu Metrologie Prof. Ing. Jiří Pospíšil, CSc. *Studium je čtyřleté *Zaměřeno na zvládnutí základních principů metrologických činností a managementu kvality *Studium je
VYUŽITÍ FOTOGRAMMETRIE pro tvorbu podkladů pro O-mapy. Workshop Příprava mapových podkladů, Velké Karlovice, únor 2018 Tomáš Leštínský
 VYUŽITÍ FOTOGRAMMETRIE pro tvorbu podkladů pro O-mapy Workshop Příprava mapových podkladů, Velké Karlovice, únor 2018 Tomáš Leštínský Fotogrammetrie Oproti geodézii není potřeba být fyzicky na místě Měření
VYUŽITÍ FOTOGRAMMETRIE pro tvorbu podkladů pro O-mapy Workshop Příprava mapových podkladů, Velké Karlovice, únor 2018 Tomáš Leštínský Fotogrammetrie Oproti geodézii není potřeba být fyzicky na místě Měření
Dálkový průzkum Země DPZ. Zdeněk Janoš JAN789
 Dálkový průzkum Země DPZ Zdeněk Janoš JAN789 Obsah: Úvod Co je DPZ (Dálkový Průzkum Země) Historie DPZ Rozdělení metod DPZ Využití DPZ Projekty využívající data DPZ Současné družicové systémy Zdroje Závěr
Dálkový průzkum Země DPZ Zdeněk Janoš JAN789 Obsah: Úvod Co je DPZ (Dálkový Průzkum Země) Historie DPZ Rozdělení metod DPZ Využití DPZ Projekty využívající data DPZ Současné družicové systémy Zdroje Závěr
Zdroj: http://geoportal.cuzk.cz/dokumenty/technicka_zprava_dmr_4g_15012012.pdf
 Zpracování digitálního modelu terénu Zdrojová data Pro účely vytvoření digitálního modelu terénu byla použita data z Digitálního modelu reliéfu 4. Generace DMR 4G, který je jedním z realizačních výstupů
Zpracování digitálního modelu terénu Zdrojová data Pro účely vytvoření digitálního modelu terénu byla použita data z Digitálního modelu reliéfu 4. Generace DMR 4G, který je jedním z realizačních výstupů
měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power
 CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
DPZ Dálkový průzkum Země. Lukáš Kamp, KAM077
 DPZ Dálkový průzkum Země Lukáš Kamp, KAM077 Dálkový průzkum Země je věda i umění získávat užitečné informace o objektech, plochách či jevech prostřednictvím dat měřených na zařízeních, která s těmito zkoumanými
DPZ Dálkový průzkum Země Lukáš Kamp, KAM077 Dálkový průzkum Země je věda i umění získávat užitečné informace o objektech, plochách či jevech prostřednictvím dat měřených na zařízeních, která s těmito zkoumanými
Projekt Pospolu. Měřický náčrt. Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Ing. Miroslava Kuthanová.
 Projekt Pospolu Měřický náčrt Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Ing. Miroslava Kuthanová. Proč si vést náčrt během mapování je zaměřena poloha (někdy i výška) určovaných bodů
Projekt Pospolu Měřický náčrt Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Ing. Miroslava Kuthanová. Proč si vést náčrt během mapování je zaměřena poloha (někdy i výška) určovaných bodů
Ověření relativní přesnosti určování objemů
 Ověření relativní přesnosti určování objemů Ing. Tomáš Křemen, Ph.D., prof. Ing. Jiří Pospíšil, CSc., Ing. Bronislav Koska tomas.kremen@fsv.cvut.cz Katedra speciální geodézie, Thákurova 7, 166 29, Praha
Ověření relativní přesnosti určování objemů Ing. Tomáš Křemen, Ph.D., prof. Ing. Jiří Pospíšil, CSc., Ing. Bronislav Koska tomas.kremen@fsv.cvut.cz Katedra speciální geodézie, Thákurova 7, 166 29, Praha
Topografické mapování KMA/TOMA
 Topografické mapování KMA/TOMA ZÁPADOČESKÁ UNIVERZITA V PLZNI Fakulta aplikovaných věd - KMA oddělení geomatiky Ing. Martina Vichrová, Ph.D. vichrova@kma.zcu.cz Vytvoření materiálů bylo podpořeno prostředky
Topografické mapování KMA/TOMA ZÁPADOČESKÁ UNIVERZITA V PLZNI Fakulta aplikovaných věd - KMA oddělení geomatiky Ing. Martina Vichrová, Ph.D. vichrova@kma.zcu.cz Vytvoření materiálů bylo podpořeno prostředky
Analýza optické trasy optickým reflektometrem
 Analýza optické trasy optickým reflektometrem Zadání: Pomocí optického reflektometru, zkrácené označení OTDR (Optical Time-Domain Reflectometer), proměřte trasu, která je složena z několika optických vláken.
Analýza optické trasy optickým reflektometrem Zadání: Pomocí optického reflektometru, zkrácené označení OTDR (Optical Time-Domain Reflectometer), proměřte trasu, která je složena z několika optických vláken.
GEPRO řešení pro GNSS Leica
 GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
Základní nastavení. Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010
 13.12.2010") Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Totální stanice řady Trimble 5600 DR Direct Reflex se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic.
 Totální stanice řady Trimble 5600 DR se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic. K dispozici jsou tři DR dálkoměry Možnost rozšíření na Autolock a Robotic Čtyřrychlostní
Totální stanice řady Trimble 5600 DR se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic. K dispozici jsou tři DR dálkoměry Možnost rozšíření na Autolock a Robotic Čtyřrychlostní
Cvičení software Groma základní seznámení
 Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Metody měření výškopisu, Tachymetrie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
Seminář z geoinformatiky Metody měření výškopisu, Tachymetrie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
Automatické rozpoznávání dopravních značek
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
Zobrazovací zařízení. Základní výstupní zařízení počítače, které slouží k zobrazování textových i grafických informací.
 Zobrazovací zařízení Základní výstupní zařízení počítače, které slouží k zobrazování textových i grafických informací. Hlavní částí každého monitoru je obrazovka, na jejímž stínítku se zobrazují jednotlivé
Zobrazovací zařízení Základní výstupní zařízení počítače, které slouží k zobrazování textových i grafických informací. Hlavní částí každého monitoru je obrazovka, na jejímž stínítku se zobrazují jednotlivé
Kvantový topografický dálkoměr KTD-1. Stručný technický popis a návod k obsluze
 Kvantový topografický dálkoměr KTD-1 Stručný technický popis a návod k obsluze Made in U.S.S.R 1987 1. Určení přístroje Kvantový topografický dálkoměr KTD-1 slouží k topografickému průzkumu terénu, hledání
Kvantový topografický dálkoměr KTD-1 Stručný technický popis a návod k obsluze Made in U.S.S.R 1987 1. Určení přístroje Kvantový topografický dálkoměr KTD-1 slouží k topografickému průzkumu terénu, hledání
Laserový skenovací systém LORS vývoj a testování přesnosti
 Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Měření průtoku kapaliny s využitím digitální kamery
 Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
MONITORING EROZNÍHO POŠKOZENÍ PŮD POMOCÍ METOD DPZ USING REMOTE SENSING FOR MONITORING OF SOIL DEGRADATION BY EROSION
 MONITORING EROZNÍHO POŠKOZENÍ PŮD POMOCÍ METOD DPZ USING REMOTE SENSING FOR MONITORING OF SOIL DEGRADATION BY EROSION 2013 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, KATEDRA HYDROMELIORACÍ
MONITORING EROZNÍHO POŠKOZENÍ PŮD POMOCÍ METOD DPZ USING REMOTE SENSING FOR MONITORING OF SOIL DEGRADATION BY EROSION 2013 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, KATEDRA HYDROMELIORACÍ
Měření optických vlastností materiálů
 E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
E Měření optických vlastností materiálů Úkoly : 1. Určete spektrální propustnost vybraných materiálů různých typů stavebních skel a optických filtrů pomocí spektrofotometru 2. Určete spektrální odrazivost
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ. Fakulta stavební. Katedra speciální geodézie BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta stavební Katedra speciální geodézie BAKALÁŘSKÁ PRÁCE Zaměření historické fasády laserovým skenovacím systémem HDS 3000 a zpracování naměřených dat Measuring of a historical
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta stavební Katedra speciální geodézie BAKALÁŘSKÁ PRÁCE Zaměření historické fasády laserovým skenovacím systémem HDS 3000 a zpracování naměřených dat Measuring of a historical