VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
|
|
|
- Aneta Macháčková
- před 5 lety
- Počet zobrazení:
Transkript
1 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘÍCÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF CONTROL AND INSTRUMENTATION DATOVÁ FÚZE PRO URČOVÁNÍ ROTACE DATA-FUSION FOR ROTATION MEASUREMENT DIPLOMOVÁ PRÁCE MASTER S THESIS AUTOR PRÁCE AUTHOR VEDOUCÍ PRÁCE SUPERVISOR Bc. DAVID SKULA doc. Ing. LUDĚK ŽALUD, Ph.D. BRNO 2008
2
3
4 Ústav automatizace a měřicí techniky Datová fúze pro určování rotace Diplomová práce Obor: Student: Vedoucí práce: Kybernetika, automatizace a měření Bc. David Skula doc. Ing. Luděk Žalud, Ph.D. Abstrakt: Cílem této práce je navržení a realizace modulu určujícího otočení ve třech vzájemně kolmých osách. Práce je rozdělena do šesti celků. V první části je pojednáno o snímači úhlové rychlosti gyroskopu. Rozebráno je jeho použití pro měření otočení. Další část práce se zabývá snímačem zrychlení akcelerometrem ve funkci snímače náklonu. Třetí část rozebírá snímač magnetického pole magnetometr ve funkci elektronického kompasu. U každého snímače je rozebrána problematika parazitních vlivů. Předchozí části tvoří základ pro HW návrh modulu. Ten je objasněn ve čtvrté části. Zabývá se zejména použitými součástkami pro zpracování signálů ze snímačů. Další část tvoří popis programového vybavení modulu. Zde je pojednáno o programovém vybavení jednotlivých snímačů a způsobu měření na nich. Poslední část tvoří popis programového vybavení řídící aplikace v počítači. Pozornost je věnována především zpracování dat ze snímačů a jejich kompenzaci vůči parazitním vlivům. Klíčová slova: Gyroskop, Akcelerometr, Magnetometr
5 Brno University of Technology Faculty of Electrical Engineering and Communication Department of Control, Measurement and Instrumentation Data-fusion for Rotation Measurement Master s Thesis Specialisation of study: Student: Supervisor: Cybernetics, Control and Measurement Bc. David Skula doc. Ing. Luděk Žalud, Ph.D. Abstrakt: The goal of this paper is to design and implement a module to determine the rotation around three axes normal to each other. The paper is divided into six parts. The first part deals with the rate sensor - the gyroscope. It is explicated how the gyroscope is used for rotation measurement. The next part of the paper explains the acceleration sensor the accelerometer, functioning as an inclination sensor. The third part analyses the magnetic field sensor the magnetometer, functioning as an electronic compass. With each type of sensor, the problems of parasitic influences are discussed. The foregoing parts constitute the basis for the HW of the module design that is explained in the forth parts. It deals especially with components used for processing the sensor signals. The next part is a description of the software of the module. Here, the software of the particular sensors and measurement methods used with them are discussed. The last part describes the software of the control application in the computer. The attention is paid especially to processing data from the sensors and their compensation against parasitic influences. Key words: Gyroscope, Accelerometer, Magnetometer
6 B i b l i o g r a f i c k á c i t a c e SKULA, D. Datová fúze pro určování rotace. Brno:,, s. 3 přílohy. Vedoucí diplomové práce doc. Ing. Luděk Žalud, Ph.D.
7 P r o h l á š e n í Prohlašuji, že svou diplomovou práci na téma Datová fúze pro určování rotace jsem vypracoval samostatně pod vedením vedoucího diplomové práce a s použitím odborné literatury a dalších informačních zdrojů, které jsou všechny citovány v práci a uvedeny v seznamu literatury na konci práce. Jako autor uvedené diplomové práce dále prohlašuji, že v souvislosti s vytvořením této diplomové práce jsem neporušil autorská práva třetích osob, zejména jsem nezasáhl nedovoleným způsobem do cizích autorských práv osobnostních a jsem si plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení 152 trestního zákona č. 140/1961 Sb. V Brně dne : Podpis: P o d ě k o v á n í Děkuji tímto doc. Ing. Luďkovi Žaludovi, Ph.D. za cenné připomínky a rady při vypracování diplomové práce. V Brně dne : Podpis:
8 5 OBSAH 1. ÚVOD GYROSKOP PRINCIP MĚŘENÍ ÚHLOVÉ RYCHLOSTI [1] GYROSKOPY V SOUČÁSTCE ADIS ZDROJE CHYB MĚŘENÍ GYROSKOPŮ Offset gyroskopu Allan Variance Teplotní závislost offsetu Chyba integrace Výstupní šum Angle Random Walk AKCELEROMETR PRINCIP MĚŘENÍ ZRYCHLENÍ AKCELEROMETRY V SOUČÁSTCE ADIS ZDROJE CHYB MĚŘENÍ AKCELEROMETRU... U Offset akcelerometru Teplotní závislost offsetu Výstupní šum Parazitní zrychlení MAGNETOMETR PRINCIP MĚŘENÍ MAGNETICKÉHO POLE MAGNETOMETR HMC ZDROJE CHYB MĚŘENÍ MAGNETOMETRU Offset magnetometr Vliv materiálů v okolí Vliv náklonu HW ŘEŠENÍ MODULU U ADIS OBVODY PRO HMC Obvod SET/RESET Napěťový zesilovač AD převodník AD
9 6 5.3 ATMEGA SW ŘEŠENÍ MODULU... U ADIS16350 [2] AD7706 [12] ATMEGA Načítáni dat Distribuce dat Řízení běhu programu mikroprocesoru SW ŘEŠENÍ ŘÍDÍCÍ APLIKACE MĚŘÍCÍ APLIKACE VIZUALIZAČNÍ APLIKACE MĚŘICÍ A KOMPENZAČNÍ POSTUPY Převod dat na fyzikální veličiny Filtrace signálu Kalibrace a kompenzace Měření offsetu gyroskopu Teplotní kompenzace gyroskopu Teplotní kompenzace akcelerometru SET/RESET kalibrace magnetometru [10] [11] Měření Hard Iron kalibračních údajů magnetometru [16] Kompenzace náklonu magnetometru [17] Kompenzace integrální chyby gyroskopů [18] ZÁVĚR LITERATURA... 79
10 7 SEZNAM OBRÁZKŮ Obr. 2.1 Princip gyroskopického jevu [1] Obr. 2.2 Příklad funkce struktury gyroskopického jevu [1] Obr. 3.1 Princip snímače zrychlení [6] Obr. 4.1 Vektor magnetického pole Země [7] Obr. 4.2 Struktura magnetorezistivního snímače [7] Obr. 4.3 Vnitřní struktura magnetometru [8] Obr. 5.1 Blokové schéma zapojení modulu Obr. 5.2 Zapojení konektoru modulu Obr. 5.3 Pohled na hotový modul Obr. 5.4 Pouzdro snímače ADIS16350 [2] Obr. 5.5 Pouzdro snímače HMC1043 [8] Obr. 5.6 Obslužný obvod SET/RESET cívky Obr. 5.7 Diferenční zesilovač Obr. 5.8 Blokové schéma AD7706 [12] Obr. 5.9 Zapojení AD Obr Zapojení mikroprocesoru ATMEGA Obr. 6.1 Komunikace s ADIS16350 [2] Obr. 6.2 Struktura výstupního registru ADIS16350 [2] Obr. 7.1 Okno měřící aplikace Obr. 7.2 Okno vizualizační aplikace Obr. 7.3 Princip kompenzace integrální chyby gyroskopů SEZNAM GRAFŮ Graf 2.1 Offsety gyroskopů pro ADIS Graf 2.2 Allan Variance pro gyroskopy ADIS16350 [2] Graf 2.3 Katalogová závislost offsetu gyroskopu na teplotě [2] Graf 2.4 Změřená závislost offsetu gyroskopu na teplotě Graf 2.5 Výstupní šum gyroskopu Graf 2.6 Znázornění Angle Random Walk [4]... 20
11 8 Graf 3.1 Katalogová závislost offsetu akcelerometru na teplotě [2] Graf 3.2 Změřená závislost offsetu akcelerometru na teplotě Graf 3.3 Výstupní šum akcelerometru Graf 4.1 Srovnání offsetu a citlivosti magnetometru [10] Graf 4.2 Celkový rozptyl výstupu magnetometru [10] Graf 4.3 Vliv magnetických materiálů [11] Graf 4.4 Vliv magneticky měkkých materiálů [11] Graf 4.5 Chyba magnetometru při náklonu podél osy X Graf Chyba magnetometru při náklonu podél osy Y Graf 7.1 Frekvenční charakteristiky FIR filtrů Graf 7.2 Teplotní kompenzace gyroskopu Graf 7.3 Teplotní kompenzace akcelerometru Graf Kompenzace náklonu podél osy X Graf 7.5 Kompenzace náklonu podél osy Y SEZNAM TABULEK Tab. 2.1 Citlivost gyroskopu Tab. 2.2 Zdroje chyb měření gyroskopu Tab. 3.1 Citlivost a dynamický rozsah akcelerometru Tab. 3.2 Zdroje chyb měření akcelerometru Tab. 4.1 Citlivost a rozsah magnetometru Tab. 4.2 Zdroje chyb magnetometru Tab. 6.1 Výstupní registry ADIS Tab. 6.2 Registry nastavení pro ADIS Tab. 6.3 Komunikační registr Tab. 6.4 Výběr registru AD Tab. 6.5 Výběr kanálu AD převodníku Tab. 6.6 Registr nastavení Tab. 6.7 Registr časování Tab. 6.8 Nastavení frekvence převodu a filtru Tab. 7.1 Parametry FIR filtrů... 67
12 9 1. ÚVOD Určení natočení objektu je v praxi velice často diskutovanou a řešenou problematikou. Navigační systémy všech úrovní přesnosti, tedy od nejjednodušších GPS přijímačů pro automobily, kde je natočení většinou určováno z pohybu vozidla, až po velice přesné, na gyroskopickém jevu založené, snímače natočení ve třech osách pro navigaci letadel, se bez znalosti otočení vůči prostředí neobejdou. Pro úspěšnou navigaci je přesné měření otočení důležitější než přesné měření translačního pohybu. Při vzrůstající translační vzdálenosti způsobí nepřesně určený úhel natočení strmě rostoucí chybu v navigaci. V mobilní robotice je navigace, a tedy i měření úhlu natočení, jednou z hlavních problematik. Roboti pohybující se po zemském povrchu většinou vystačí se znalostí otočení kolem osy kolmé na zemský povrch. Pro létající roboty je potřeba navíc měřit ve dvou osách náklon. Tato práce je zaměřena na vytvoření modulu schopného snímat natočení lidské hlavy. Využití je předpokládáno pro teleprezenční helmu, kde se kamera na robotu natáčí tak, jak operátor otáčí hlavou. Z toho vyplývá, že modul musí být schopen měřit úhel natočení ve všech třech základních osách. Pro měření otočení lze využít gravitační pole Země (akcelerometr) nebo magnetické pole Země (magnetometr). Těmito metodami je úhel určen absolutně, chyba je po celou dobu měření konstantní, ale relativně velká. Naproti tomu relativní metoda měření úhlu natočení pomocí gyroskopu vykazuje dobrou přesnost, avšak chyba se zvyšuje se vzrůstající dobou měření. Úkolem práce je matematicky sloučit všechny uvedené metody měření a dosáhnout tak malé a konstantní chyby měření. Dále jsou postupně vysvětleny metody měření gyroskopem, akcelerometrem a magnetometrem s důrazem na popis a proměření nejvýraznějších parazitních vlivů. Následuje HW a SW návrh modulu. V poslední části je popsána matematická fúze dat získaných z jednotlivých snímačů.
13 10 2. GYROSKOP Gyroskop je zařízení měřící rychlost otáčivého pohybu v ose, na kterou je nastaveno. Pro účely této práce je však stěžejní znalost úhlu otočení, nikoli velikosti změny otočení za čas (tedy rychlosti). Je-li rychlost měřená gyroskopem integrována, výsledkem je přímo úhel natočení. Protože všechna data jsou zpracovávána číslicově, přechází integrace v sumaci. Předchozí shrnuje rovnice (2.1). T k ( t) d( t) Θ( k) = 0 i= 0 Θ( T) = ω ω( i) (2.1) Θ ( T ) / Θ( k) - úhel natočení - od času 0 do T / od vzorku 0 do k; [ ω ( t) / ω( i) - rychlost otáčivého pohybu - v čase t / ve vzorku k; [ / s] ] Je zřejmé, že gyroskop dokáže měřit úhel natočení pouze vzhledem ke své výchozí pozici (počátek sumace, zapnutí napájení). Nemá žádnou vazbu na okolí, absolutní otočení, např. vůči zemskému povrchu, je nutné zabezpečit jinak. 2.1 PRINCIP MĚŘENÍ ÚHLOVÉ RYCHLOSTI [1] Pro měření úhlové rychlosti se využívá gyroskopického jevu založeného na Coriolisově síle. Ta působí na libovolný hmotný předmět, který se pohybuje rychlostí v v soustavě rotující kolem osy rotace úhlovou rychlostí rychlosti předmětu ω (2.2). Při konstantní v je síla úměrná úhlové rychlosti ω, která je předmětem měření. F C = 2 m v ω (2.2) F C - Coriolisova síla; [ N ] m - hmotnost; [ kg] 1 v - rychlost pohybu; [ m s ] 1 ω - úhlová rychlost; [ rad s ]


14 11 Základní princip je zobrazen na Obr Základ tvoří rezonující referenční hmotnost (resonationg mass) upevněná v rámu (inner frame). Ta je rozkmitána ve směru kolmém na otáčení. Přitom vzniká Coriolisova síla úměrná úhlové rychlosti otáčení, která stlačí vnější pružiny rámu a způsobí vzájemný posuv měřících plošek (Coriolis sense fingers) fungujících jako elektrody vzduchových kondenzátorů. Výstup je tedy změna kapacity úměrná úhlové rychlosti otáčení. Obr. 2.1 Princip gyroskopického jevu [1] Na Obr. 2.2 je celá situace měření úhlového zrychlení znázorněna. Patrná je schopnost zařízení zaznamenat rychlosti otáčení jen do určité meze. Obr. 2.2 Příklad funkce struktury gyroskopického jevu [1]
15 GYROSKOPY V SOUČÁSTCE ADIS16350 Pro určování rotace ve třech ortogonálních osách je potřeba jeden gyroskop do každé osy. Z předešlých průzkumů vyplynulo, že nejvhodnější volbou z hlediska přesnosti měření a fyzické velikosti součástky je gyroskop ADIS16350 firmy Analog Devices [2]. Jedná se o součástku integrující tři ortogonálně umístěné gyroskopy založené na MEMS technologii. V každé ose je také implementován akcelerometr (viz. dále) a teplotní čidlo. Měření teploty přímo na čipu každé osy je velice výhodné, neboť teplotní závislosti snímačů jsou značné, jak bude rozebráno dále. Všechny snímače jsou obsluhovány vestavěným mikrokontrolérem. Data jsou přístupná přes rozhraní SPI. Výhodou tohoto řešení je snadný přístup k již zpracovaným datům, odpadá řešení analogové části zpracování signálu a v neposlední řadě i celkově malá velikost celého zařízení. Hlavní nevýhodou je implementace analogové a digitální části v jednom pouzdru, což přináší obecně větší zarušení výstupního signálu. Samotná realizace tříosého gyroskopu s analogovou částí by však byla konstrukčně velmi náročná (zajištění ortogonality os) a celé zařízení by bylo neúměrně větší. Hodnota úhlové rychlosti je na výstupu ze součástky ve formě 14-ti bitového čísla. Přepočet zpět na úhlovou rychlost je možný násobením konstantou úměrnosti podle Tab. 2.1 [2]. Parametr Poznámka Hodnota Citlivost pro rozsah ±300 /s 25 C 0,07326 /s/lsb Citlivost pro rozsah ±150 /s 25 C 0,03663 /s/lsb Citlivost pro rozsah ±75 /s 25 C 0,01832 /s/lsb Tab. 2.1 Citlivost gyroskopu Jak je vidět, ADIS16350 umožňuje nastavení dynamického rozsahu gyroskopu na ±300 /s, ±150 /s nebo ±75 /s. V této práci je výhradně používán nejvyšší dynamický rozsah ±300 /s.
16 ZDROJE CHYB MĚŘENÍ GYROSKOPŮ Měření fyzikálních veličin je vždy zatíženo chybou. Dále budou rozebrány nejdůležitější zdroje chyb při určování úhlu otočení prostřednictvím gyroskopů. V Tab. 2.2 jsou tyto vlivy vypsány společně s příslušnými katalogovými hodnotami [2] pro použitou součástku ADIS Parametr Poznámka Hodnota Offset Jiný pro každou součástku Teplotní závislost ofsetu 0,1 /s/ C Výstupní šum 25 C, ±300 /s, bez filtrace 0,6 /s rms Angular Random Walk 25 C 4,2 / hr Tab. 2.2 Zdroje chyb měření gyroskopu V dalších odstavcích budou tyto chyby popsány společně s dalšími, vyplývajícími z nutnosti integrace signálu. Kde je to možné, je příslušná katalogová chyba ověřena měřením Offset gyroskopu Offset gyroskopu je hodnota úhlové rychlosti na výstupu ze snímače při nulové skutečné úhlové rychlosti. Offset je dán především konstrukčními nepřesnostmi. Před začátkem měření je nutné offset změřit a dále od každé naměřené hodnoty odečítat. Na druhou stranu z charakteru jeho vzniku vyplývá, že se s časem výrazně nemění. Důležitá je ovšem podmínka konstantní teploty. Na grafu Graf 2.1 je zobrazen výstup z gyroskopické osy Y po dobu 12s. Při měření bylo zařízení v klidu. Střední hodnota naměřených dat v každé ose odpovídá offsetu gyroskopu příslušné osy. Střední hodnota gyroskopické osy Y byla změřena jako 0,2539 /s. Pro zbylé dvě osy je pro přehlednost zobrazena pouze jejich střední hodnota. Pro osu X je rovna 0,7926 /s, pro osu Z -0,9254 /s.
17 ω [ /s] Vystup osy Y Stred. hod. osy X ( /s) Stred. hod. osy Y ( /s) Stred. hod. osy Z ( /s) t [s] Graf 2.1 Offsety gyroskopů pro ADIS16350 Z důvodu jasně patrného velkého zašumění dat nyní vyvstává otázka: Jak dlouho je třeba data z gyroskopu průměrovat, aby výsledný offset byl co možná nejblíže skutečnosti? Tímto problémem se zabývá následující kapitola Allan Variance Allan Variance je metoda analýzy sekvence vzorků v čase, určená k odstranění vlivu šumu na hledanou průměrnou hodnotu sekvence [3]. Základní myšlenkou je rozdělení zkoumané sekvence na intervaly stejné délky τ. V každém intervalu je spočtena střední hodnota y (τ ). Dále jsou sečteny kvadráty odchylek dvou sousedních intervalů (respektive jejich středních hodnot). Výsledek je dělen normalizačním koeficientem. Situaci shrnuje rovnice (2.3).
 2 ( n 1) n 1 i= 0 AVAR 2 ( τ ) - hodnota Allan Variance pro délku intervalu τ ; [ / s] n celkový počet intervalů; [ ] (τ - střední hodnota i-tého intervalu délky τ ; [ / s] y ) i Výsledkem analýzy")
18 15 AVAR ( τ ) = ( y( τ ) i+ 1 y( τ ) i ) (2.3) 2 ( n 1) n 1 i= 0 AVAR 2 ( τ ) - hodnota Allan Variance pro délku intervalu τ ; [ / s] n celkový počet intervalů; [ ] (τ - střední hodnota i-tého intervalu délky τ ; [ / s] y ) i Výsledkem analýzy je graf závislosti hodnoty Allan Variance na délce intervalu τ. Závislost pro použitý gyroskop je zobrazena na Graf 2.2. Čím menší hodnota Allan Variance pro délku intervalu τ ( dále jen AVAR 2 ( τ ) ), tím přesněji je pro daný interval τ offset zjištěn. Se zvětšujícím se intervalem τ klesá i hodnota AVAR 2 ( τ ). To je logický závěr, neboť předpokládáme-li zašumění šumem se střední hodnotou rovnou nule, blíží se jeho vliv k nule se vzrůstajícím intervalem pozorování. Tento předpoklad ovšem neplatí neomezeně. V jistém bodě začne AVAR 2 ( τ ) opět růst. Je to způsobeno vlastní nestabilitou výstupu senzoru (tzv. rate random walk). Tento jev není patrný na charakteristice Allan Variance pro použitý gyroskop. Kdyby se však interval τ nadále zvětšoval, charakteristika by začala růst. Pro použitý gyroskop je nejvhodnější doba měření offsetu 300s (Graf 2.2). Graf 2.2 Allan Variance pro gyroskopy ADIS16350 [2]
19 Teplotní závislost offsetu Offset změřený metodou Allan Variance by byl platný pouze pro teplotu v době měření, ta by navíc měla být v době experimentu konstantní. Teplotní závislost offsetu gyroskopu pro ADIS16350 je 0,1 /s/ C (Tab. 2.2) [2]. Nekompenzování této chyby by vedlo k rapidnímu zhoršení výsledků. Z praktických testů vyplývá, že při zapnutí zařízení při okolní teplotě 25 C, vzroste vnitřní teplota každé osy asi o 5 C po zhruba 15 minutách. Poté je již teplota více méně konstantní. Je-li offset změřen na začátku měření při 25 C, po ustálení teploty uvnitř zařízení je již offset o 0,5 /s větší. To by způsobilo parazitní nárůst úhlu otočení o 0,5 každou sekundu. Při změně vnější teploty v průběhu měření je situace ještě horší. Graf závislosti ofsetu na teplotě podle datasheetu k obvodu ADIS16350 [2] je zobrazen na Graf 2.3. Zvoleným měřítkem je však nepoužitelný. Jediná vypovídací informace jsou maximální možné ofsety pro zobrazený rozsah teplot. Proto byla tato závislost změřena. Z důvodu organizace experimentu není rozsah teplot nijak velký, ale pro ověření katalogových údajů postačí. Naměřená data jsou zašuměná. Pro relevantní výsledek je bylo nutné vyfiltrovat dolno-propustním filtrem. Výsledný graf je proložen přímkou (předpokladem je lineární závislost ofsetu na teplotě). Její směrnice ukazuje koeficient závislosti offsetu na teplotě (Graf 2.4). Graf 2.3 Katalogová závislost offsetu gyroskopu na teplotě [2]
20 Vystup gyroskopu Regresni primka (smernice ) ω [ /s] T [ C] Graf 2.4 Změřená závislost offsetu gyroskopu na teplotě Koeficient závislosti offsetu gyroskopu na teplotě vyšel -0,1155 /s/ C. To je v souladu s katalogovými údaji. Navíc se ukázalo, že offset gyroskopu s teplotou klesá. Alespoň pro teploty nad 10 C Chyba integrace Chyba integrace vychází z nutnosti integrovat měřenou úhlovou rychlost pro získání úhlu natočení. Úzce souvisí s offsetem gyroskopu. Má-li totiž gyroskop byť jen malý offset, integrací se neustále přičítá k užitečnému signálu a zvyšuje se s rostoucím časem. Čím menší hodnota offsetu, tím delší čas je možné integrovat signál bez ztráty požadované přesnosti. Nakonec se však chyba integrace projeví vždy. Je proto nezbytné tuto chybu kompenzovat. K tomu je nejvhodnější použít další snímač měřící úhel natočení, ale pracující na principu absolutního měření (akcelerometry, magnetometry). Problematika kompenzace bude osvětlena dále.
21 18 Integrace však přináší i jistou výhodu. Šum provázející měření se integrací potlačí a není potřeba pro gyroskopy používat dolno-propustní filtry. Tím se neznehodnotí jeho dynamické vlastnosti Výstupní šum Výstupní šum gyroskopu je typu bílý šum s nulovou střední hodnotou. Podle katalogových údajů je jeho směrodatná odchylka rovna 0,6 /s rms [2]. Tato skutečnost byla ověřena měřením. Zařízení bylo ponecháno v klidové poloze a měřena data z gyroskopu. Výstupní signál je zobrazen v Graf 2.5. Dále je vyznačena střední hodnota signálu (offset) a vypočtená směrodatná odchylka podle vzorce (2.4). s = 1 n 1 n i= 1 ( x i x) x = n 2 1 n i= 1 x i (2.4) s směrodatná odchylka; [ / s] n počet hodnot měření; [ ] x - i-tá hodnota měření; [ / s] i x - střední hodnota signálu; [ / s] Směrodatná odchylka vypočtená podle vzorců (2.4) je 0,7474 /s. Měření pobíhalo na rozsahu ±300 /s. Pro tento rozsah udává výrobce velikost šumu 0,6 /s. Naměřená směrodatná odchylka (0,7474 /s) je nepatrně vyšší než udává výrobce. Je to způsobeno nedokonalým zajištěním gyroskopu proti vibracím či otřesům a menším souborem dat pro výpočet použitým.
22 ω [ /s] Vystup osy Y -3 Stred. hod. osy X ( /s) Smero. odchylka osy Y ( /s) t [s] Graf 2.5 Výstupní šum gyroskopu Jak již bylo řečeno v kapitole o chybě integrace, není šum gyroskopu závažným problémem. Při integraci signálu se šum projeví převážně střední hodnotou, která je ovšem nulová. Jediný chybový faktor vnesený šumem i přes integraci je tzv. Angle Random Walk Angle Random Walk Angle Random Walk (ARW) je charakteristika šumu, popisující vliv šumu v signálu na jeho integraci [4]. Ve statistice se používá k popsání situací, kde je výstup systému zatížen náhodnými nekorelovanými skoky. Budeme-li například házet mincí, padne-li hlava uděláme krok dopředu a v případě orla krok dozadu. Provedeme 1000 hodů mincí, jak daleko od výchozí pozice skončíme? Nejpravděpodobněji přesně tam, kde jsme začali, ale je možné skončit i hodně daleko, i když s menší pravděpodobností.

23 20 Bude-li takových pokusů provedeno 1000, histogram počtu koncových míst v závislosti na vzdálenosti od počátku bude vypadat podobně jako na Graf 2.6. Graf 2.6 Znázornění Angle Random Walk [4] Stejným způsobem je možno popsat výstupní šum gyroskopu. ARW popisuje toto rozložení prostřednictvím směrodatné odchylky. Je udáváno v jednotkách / hr. Značí, jaké směrodatné odchylky nabývají data po jedné hodině integrace signálu. V případě ADIS16350 je to 4,2 / hr [2]. Je patrné, že velikost ARW záleží jak na velikosti šumu, tak na době integrace. Tato chyba je kompenzovatelná pouze za přispění přídavného absolutního měření úhlu otočení, jako v případě chyby integrace (akcelerometry, magnetometry).
24 21 3. AKCELEROMETR Akcelerometr je obecně zařízení měřící zrychlení ve své ose citlivosti. Pro účely této práce je stěžejní schopnost akcelerometru měřit také gravitační zrychlení Země. To nabývá hodnot 0 až 1g. Při nulové naměřené hodnotě je měřící osa akcelerometru rovnoběžná se povrchem Země, při jednotkovém výstupu je měřící osa kolmá na Zemský povrch. Při výstupu v rozsahu 0 až 1g lze náklon zařízení vůči vodorovné ose (rovnoběžná s povrchem Země) vypočítat pomocí asin(a), kde a je měřené zrychlení. Nevýhodou tohoto postupu je nelineární funkce sinus. Při náklonech blížících se 90 je funkce sinus již natolik plochá, že i šumová změna zrychlení vyvolá několikastupňovou změnu náklonu. Lepší varianta výpočtu náklonu existuje, je-li k dispozici další akcelerometr s měřící osou kolmou na osu prvního snímače. V tomto případě je výpočet náklonu možný pomocí rovnic (3.1) [5]. ϕ sgn( y) π a tan 2( y, x) = sgn( y) 2 ( π ϕ) sgn( y) x > 0 x = 0 x < 0 x zrychlení odpovídající náklonu; [ g ] y zrychlení v ose kolmé na osu náklonu; [ g ] 0 a tan 2(0, x) = undef. π x > 0 x = 0 x < 0 (3.1) ϕ - úhel v rozsahu 0, π y vypočten ze vzorce: = a tan( ) 2 x ϕ ; [ ] sgn(y) funkce signum: 1 sgn( y) = 0 1 y < 0 y = 0 y > 0 Funkce vrací úhel v rozsahu [ π,π ) a funguje dobře při všech možných náklonech. Její hlavní výhodou je odstranění špatné rozlišitelnosti funkce sinus při náklonech blízkých 90. Nevýhodou je nutnost použití přídavného akcelerometru.
![22 3.1 PRINCIP MĚŘENÍ ZRYCHLENÍ Princip měření zrychlení [6] je zachycen na Obr. 3.1. Jako samotný snímač je použit diferenční kapacitní měřič polohy.](/docs-images/102/154793661/images/25-1.jpg "Ten využívá kapacitního jevu, kdy se kapacita kondenzátoru mění se vzdáleností elektrod. Na jednu krajní elektrodu je přiváděn sinusový, na druhou kosinusový signál (Fixed Outer Plates).")
25 PRINCIP MĚŘENÍ ZRYCHLENÍ Princip měření zrychlení [6] je zachycen na Obr Jako samotný snímač je použit diferenční kapacitní měřič polohy. Ten využívá kapacitního jevu, kdy se kapacita kondenzátoru mění se vzdáleností elektrod. Na jednu krajní elektrodu je přiváděn sinusový, na druhou kosinusový signál (Fixed Outer Plates). Je-li pohyblivá elektroda přesně uprostřed snímače (stejná vzdálenost mezi oběma elektrodami), oba signály projdou na měřící elektrodu se stejnou amplitudou a vyruší se. Výstupní signál bude nulový. Vychýlení střední elektrody způsobí rozvážení můstku a na výstupu se objeví signál s amplitudou úměrnou vychýlení a s fází odpovídající směru pohybu. Tento snímač je připevněn pohyblivou elektrodou k referenční hmotnosti (Proof Mass). Ta je z obou stran uchycena pružinami (Tether) k podložce. Je-li zařízení v klidu, střední elektroda je přesně uprostřed kapacitoru (nulový výstup). Bude-li na čip působit konstantní zrychlení, referenční hmotnost se vychýlí z rovnovážného stavu v závislosti na působícím zrychlení, vlastní referenční hmotnosti a na odporu pružin. Vychýlení se projeví jako nenulový střídavý signál na výstupu ze snímače s amplitudou úměrnou zrychlení. Systém s jedním kapacitním snímačem se nepoužívá. Vykazuje malou rozlišovací schopnost a přesnost měření. Proto je na referenční hmotnosti připevněno několik diferenčních kapacitorů z každé strany. Obr. 3.1 Princip snímače zrychlení [6]
26 AKCELEROMETRY V SOUČÁSTCE ADIS16350 Jak již bylo řečeno v kapitole o použitém gyroskopu, obsahuje součástka ADIS16350 tři akcelerometry navzájem ortogonálně umístěny. Uspořádání je výhodné zvlášť při uvažovaném použití funkce atan2 pro výpočet náklonu. Podél dvou kolmých os rovnoběžných s povrchem Země je měřen náklon a třetí osa (kolmá na zemský povrch) je využita jako druhý parametr do funkce atan2. Data jsou opět přístupná přes rozhraní SPI s 14-ti bitovým rozlišením. Převod na zrychlení se děje násobením konstantou citlivosti podle Tab. 3.1 [2]. Parametr Poznámka Hodnota Citlivost 25 C 2,522 mg/lsb Dynamický rozsah každé osy ±10g Tab. 3.1 Citlivost a dynamický rozsah akcelerometru V Tab. 3.1 je také uveden dynamický rozsah akcelerometrů v součástce ADIS Pro uvažované použití akcelerometru ve funkci inklinometru (měření náklonu) je rozsah 10g přemrštěný, až nežádoucí. Snižuje se tím citlivost, která mohla být při 14-bitovém slovu na menším rozsahu větší. Stávající rozsah (a tím i citlivost) umožňují měřit náklon pouze s krokem asi 0,14. Akcelerometry však nejsou zamýšleny jako stěžejní snímače otočení, nýbrž jen pro absolutní měření náklonu pro kompenzaci gyroskopů. Nízká citlivost na malá zrychlení není tedy velký problém. 3.3 ZDROJE CHYB MĚŘENÍ AKCELEROMETRU V této kapitole jsou rozebrány nejvýraznější zdroje chyb měření pomocí akcelerometru ve funkci inklinometru. V Tab. 3.2 jsou uvedeny chyby a jejich velikosti pro použitou součástku ADIS16350 podle katalogových údajů výrobce [2].
27 24 Parametr Poznámka Hodnota Offset jiný pro každou součástku Výstupní šum 25 C, bez filtrace 35 mg rms Teplotní závislost offsetu 4 mg/ C Tab. 3.2 Zdroje chyb měření akcelerometru V dalším budou tyto chyby rozebrány a ověřeny měřením. Popsány budou i další chyby vyplývající z použití akcelerometru pro měření náklonu Offset akcelerometru Offset akcelerometru je hodnota na výstupu ze snímače při nulovém zrychlení působícím v měřící ose. Je dán především konstrukčními nepřesnostmi. Před začátkem měření by bylo dobré offset zjistit a následně od každé naměřené hodnoty odečíst. Situace zde ovšem není tak jednoduchá jako v případě gyroskopů. Nulovou působící rychlost je možné zajistit snadno, nulové působící zrychlení zajistit v podstatě nelze. Tíhové zrychlení (které je také předmětem měření) působí na Zemi stále, jedinou možností by bylo umístit akcelerometr tak, aby jeho měřicí osa byla přesně kolmá na vektor tíhového zrychlení (tedy přesně vodorovně). K tomu by ovšem bylo zapotřebí další přesné zařízení k měření tíhového zrychlení. Tento postup je náročný a v praxi těžko realizovatelný. Další možností jak offset zjistit je měnit náklon akcelerometru v celém jeho rozsahu a najít maximální a minimální hodnotu zrychlení. Průměr těchto dvou hodnot by odpovídal hledanému offsetu. Ale jen za předpokladu stejné citlivosti akcelerometru pro kladná i záporná zrychlení. Nekompenzování offsetu akcelerometru není tak tragická chyba jako v případě gyroskopu. Neprovádí se zde žádná integrace, tudíž offset se s rostoucím časem nezvětšuje. Výsledek měření ovlivňuje za konstantní teploty stále stejně a jeho velikost nepřesáhne, po přepočtu na náklon, několik desetin stupně. Z důvodů zde popsaných, nebyl offset akcelerometru měřen.
28 Teplotní závislost offsetu Stejně jako v případě gyroskopu je i u akcelerometru offset značně závislý na teplotě. Podle katalogových údajů je to 4 mg/ C [2]. Po přepočtení na náklon to odpovídá zhruba 0,2 / C. Původně malý, konstantní a tím zanedbatelný ofset by při vzrůstu teploty o 5 C narostl na 1 náklonu. Jak bylo ukázáno v případě gyroskopu, reálně k takovému nárůstu teploty skutečně dochází (po zapnutí napájení se zařízení zahřívá). Tuto skutečnost již není možné ignorovat. Charakteristika, uvedená v datasheetu k obvodu ADIS16350, popisující tuto teplotní závislost je zobrazena na Graf 3.1. Je z ní patrná lineární závislost offsetu akcelerometru na teplotě s tím, že offset roste se vzrůstající teplotou. Skutečnou směrnici lineární závislosti je však nutné změřit pro konkrétní součástku. Měření bylo provedeno opět v úzkém rozsahu teplot (potíže s dosažením vyšších či nižších teplot). Pro běžné použití a pro zjištění teplotní závislosti však stačí. Výsledek je zobrazen na Graf 3.2. Naměřená data byla nejprve filtrována dolno-propustným filtrem a následně proložena přímkou. Její směrnice určuje koeficient teplotní závislosti offsetu akcelerometru na teplotě. Graf 3.1 Katalogová závislost offsetu akcelerometru na teplotě [2]
29 Vystup akcelerometru Regresni primka (smernice ) a [g] T [ C] Graf 3.2 Změřená závislost offsetu akcelerometru na teplotě Z grafu Graf 3.1 vyplývá hodnota závislosti na teplotě 2,2 mg/ C (vypočteno z rozsahu 25 C až 70 C). V tabulce datasheetu je však uvedena hodnota 4 mg/ C. Z provedeného měření vyšel koeficient teplotní závislosti 2,1 mg/ C. Použita je tedy změřená hodnota 2,1 mg/ C. Z jakého důvodu je v tabulce katalogu uvedena hodnota jiná není známo Výstupní šum Měření na akcelerometru je, stejně jako u gyroskopů, zatíženo šumem s nulovou střední hodnotou. Podle výrobce je jeho hodnota 35mg. Tato skutečnost byla ověřena měřením. Zařízení bylo ponecháno v klidu a měřena byla data z akcelerometru. Výstupní signál je zobrazen v Graf 3.3. Dále je vyznačena střední hodnota signálu (offset) a vypočtená směrodatná odchylka podle vzorce (2.4).
30 Vystup osy X Stred. hod. osy X ( g) Smero. odchylka osy X (0.0295g) a [g] t [s] Graf 3.3 Výstupní šum akcelerometru Výstupní šum vyšel 29,5mg. To je hodnota dokonce nižší, než udává výrobce (35mg). Šum u akcelerometru je větší problém než u gyroskopu. Integrace se zde neprovádí, proto je nutné signál z akcelerometrů filtrovat filtrem typu dolní propust Parazitní zrychlení Tato chyba vychází z potřeby měření pouze tíhového zrychlení Země, z něhož je následně počítán náklon. Problémem je, že akcelerometr měří jakákoli zrychlení, ne pouze tíhové. Bude-li například měřící osa akcelerometru umístěna vodorovně se Zemí, měřený úhel bude nulový. Přidá-li se však vodorovný pohyb, naměří akcelerometr zrychlení tohoto pohybu a vyhodnotí ho chybně jako úhel natočení.
31 28 Parazitní zrychlení je největším zdrojem chyb při měření náklonu akcelerometrem. Dosáhnout může několikanásobku používaného měřícího rozsahu (1g), protože různé pohyby se zařízením nebo vibrace mohou snadno dosahovat zrychlení daleko přesahujícím 1g. Jedinou možností snížení vlivu parazitních zrychlení je použití dolonopropustných filtrů, které v měřeném signálu potlačí rychlé změny zrychlení, vyvolané vibracemi a rychlými pohyby.
32 29 4. MAGNETOMETR Zařízení pro měření magnetického pole se nazývá magnetometr. Obecně je schopen měřit jakékoli magnetické pole velikostí spadající do rozsahu použité součástky. V této práci je magnetometru využito pro měření magnetického pole Země. Z těchto údajů je posléze vypočten úhel odklonu od severu, tedy azimut. Velikost pole se mění v závislosti na místě měření. Siločáry vycházejí z jižního magnetického pólu a vcházejí do severního magnetického pólu. Označení magnetický pól je použito záměrně. Tyto póly se totiž neshodují s geografickými póly a úhel mezi přímkami spojujícími příslušné póly je asi 11,5 [7]. Na Obr. 4.1 je zobrazena 3D reprezentace vektoru magnetického pole H e v libovolném bodě na Zemi. H ex a H ey jsou rovnoběžné s povrchem a H ez směřuje do středu Země. Obr. 4.1 Vektor magnetického pole Země [7]
33 30 Úhel α vyjadřuje přímo azimut (úhel odklonu od severu). Je počítán z hlavních složek vektoru magnetického pole podle rovnice (4.1). H H EY α = a tan (4.1) EX α - azimut; [ ] H, - složky vektoru magnetického pole v ose X a Y; [ ] EX H EY Inklinace δ je úhel mezi vektorem magnetického pole H e a jeho složkou H ez, směřující do středu Země. Jeho velikost je 0 na rovníku a blíží se ±90 blízko pólů. V našich zeměpisných šířkách se inklinace pohybuje kolem -65. Deklinace λ je úhel mezi magnetickým a geografickým pólem planety, je závislá na konkrétním místě na Zemi. Zvětšuje se s klesající vzdáleností k pólům a může dosáhnout až ± PRINCIP MĚŘENÍ MAGNETICKÉHO POLE Princip měření magnetického pole je založen na magntorezistivním jevu [7]. Tento jev je založen na změně odporu magnetického materiálu při změně působícího magnetického pole. Jako magnetický materiál se nejčastěji používá permalloy (19% Fe, 81% Ni). Na Obr. 4.2 je zobrazen tenký plátek permalloye. Přiložíme-li snímač do magnetického pole tak, aby jeho vektor byl rovnoběžný s procházejícím proudem, magnetické domény budou orientovány v jeho směru a odpor plátku bude největší (R max ). Po vychýlení vektoru magnetického pole z rovnoběžného směru o úhel α dojde k magnetizaci domén v jeho směru a odpor snímače se zmenší. Při dosažení kolmosti vektoru se směrem proudu bude kladený odpor nejmenší, tedy R min.
34 31 Obr. 4.2 Struktura magnetorezistivního snímače [7] Na Obr. 4.3 je blokově znázorněna vnitřní struktura tříosého magnetometru [8]. Obsahuje tři snímače magnetického pole ve formě Wheatstonových můstků složených z rezistorů z magnetorezistivního materiálu. Každý můstek je orientován ve směru jedné měřící osy. Po připojení napájení je mezi výstupy můstků napětí úměrné směru a velikosti magnetického pole. Snímač dále obsahuje SET/RESET cívky a OFFSETové cívky. Po přivedení proudového impulsu na SET/RESET cívku se magnetické domény namagnetují ve směru magnetického pole vyvolaným proudem [9]. Po odeznění proudového impulsu se domény opět natočí do směru daného magnetickým polem Země. Tato procedura zabraňuje vlivu parazitních magnetických polí a rozladění magnetometru. OFFSETové cívky jsou určeny pro kompenzaci offsetu magnetometru. Jejich řízení je však složité a většinou se nepoužívají. Pro kompenzaci offsetu se s výhodou používají SET/RESET cívky. Po přivedení proudového impulsu se magnetické domény nakalibrují na jeden směr a po přivedení opačného impulsu na směr opačný. Je-li načten výstup z můstku pro obě polarity pulsu, je možné jejich sečtením a vydělením dvěmi vypočítat offset příslušné osy.
35 32 Obr. 4.3 Vnitřní struktura magnetometru [8] 4.2 MAGNETOMETR HMC1043 Snímač HMC1043 obsahuje tři snímače magnetického pole ve třech navzájem kolmých osách. Snímače pracují na principu magnetorezistivního jevu, kdy se odpor materiálu mění s velikostí a směrem působícího magnetického pole. Při použití pro měření magnetického pole Země a určování azimutu je stěžejní závislost na směru magnetického pole. Závislost na velikosti magnetického pole je spíše vlastnost parazitní. V Tab. 4.1 je uvedena citlivost a měřící rozsah magnetometru HMC1043 [8]. Parametr Poznámka Hodnota Citlivost Proud SET/RESET = 0.5A 1 mv/v/gauss Rozsah měřitelných polí ±6 gauss Tab. 4.1 Citlivost a rozsah magnetometru
36 33 Velikost magnetického pole Země je asi 0,6 gauss. Při napájecím napětí 5V je citlivost 5mV/gauss, což odpovídá výstupnímu signálu snímače v rozsahu ±3mV. Zřejmá je nutnost signál zesílit před jeho zpracováním. Rozsah měřitelných polí je více než dostačující. Je dokonce 10-krát větší, než je pro měření magnetického pole Země potřeba. 4.3 ZDROJE CHYB MĚŘENÍ MAGNETOMETRU Zde budou rozebrány zdroje chyb nejvíce se projevující na měřené veličině. V Tab. 4.2 jsou vypsány hlavní chyby měření podle výrobce společně s katalogovými hodnotami [8]. Parametr Poznámka Hodnota Offset (typicky) OFFSET =(OUT+)-(OUT-) ±0.5 mv/v Offset (max) OFFSET =(OUT+)-(OUT-) ±1.25 mv/v Tab. 4.2 Zdroje chyb magnetometru V následujícím jsou tyto a další v datasheetu neuvedené chyby rozebrány a je diskutována jejich velikost a vliv na měření Offset magnetometr Offset magnetometru je hodnota, úměrná magnetickému poli, na výstupu snímače při nulovém působícím poli. Princip vzniku je stejný jako v případě gyroskopu nebo akcelerometru. Jde o výrobní nepřesnosti, zde konkrétně o rozdílný odpor magnetorezistorů. Offset je měřen jako rozvážení můstku mezi výstupy OUT+ a OUT-. Jeho velikost je závislá na napájecím napětí. V této práci je použito napájení 5V, což odpovídá maximálnímu offsetu ±6,25mV. To je více než dvojnásobek možného měřeného signálu při měření magnetického pole Země (±3mV). Situace je znázorněna na Graf 4.1 a Graf 4.2.
![34 Graf 4.1 Srovnání offsetu a citlivosti magnetometru [10] Graf 4.](/docs-images/102/154793661/images/37-1.jpg "2 Celkový rozptyl výstupu magnetometru [10] Cejchování Y-ové osy grafu")
")
37 34 Graf 4.1 Srovnání offsetu a citlivosti magnetometru [10] Graf 4.2 Celkový rozptyl výstupu magnetometru [10] Cejchování Y-ové osy grafu neodpovídá zde uváděným hodnotám. Grafy jsou výrobcem měřeny pro jiný snímač magnetického pole (HMC1022) [10]. Pro ilustraci problému však postačí.
38 35 Na Graf 4.1 je modře zobrazeno pásmo možného výstupu magnetometru při daném magnetickém poli bez vlivu ofsetu, červeně je zobrazeno pásmo maximálního offsetu. Graf 4.2 znázorňuje celkový maximální rozptyl výstupu snímače v závislosti na působícím poli. Je zřejmé, že bez vlivu offsetu by se výstupní signál snímače pohyboval v rozmezí ±3mV. Reálně je však nutno počítat s offsetem, tudíž rozsah výstupu snímače je ±9,25mV (3mV + 6,25mV). Z toho plyne podstatné snížení přesnosti. Protože dále je signál ze snímače zesilován na rozsah AD převodníku, musí být zesílení takové, aby nebyl rozsah AD převodníku překročen ani při maximálním offsetu. Oproti signálu bez offsetu klesne zesílení asi 3-krát Vliv materiálů v okolí Jako i střelka kompasu neukazuje na sever v blízkosti magnetických materiálů, je i magnetometr citlivý na vše, co deformuje magnetické pole Země. Mezi tyto vlivy patří jak magnetické kovy, tak různé zdroje parazitního magnetického pole. Například transformátory nebo motory. Nejlepším způsobem jak tyto chyby eliminovat, je odstranit z blízkosti magnetometru všechny zdroje tohoto rušení. Obzvláště zdroje magnetického pole. Udává se, že předmět deformující magnetické pole, by měl být od magnetometru vzdálen dvojnásobek své velikosti. Ne vždy je to však možné (umístění magnetometru do konstrukce např. robota). Vliv materiálů v okolí na magnetometr lze rozdělit na vliv magneticky tvrdých materiálů (Hard Iron) a magneticky měkkých materiálů (Soft Iron) [11]. Hard Iron materiály se projevují jako konstantní offset každé osy (Graf 4.3). Jejich kompenzace je v podstatě snadná a v této práci je použita. Magneticky měkké materiály deformují výsledek podle Graf 4.4 (deformace ideální kružnice v elipsu). Kompenzace této chyby je složitější a její použití není dosud implementováno.
![36 Graf 4.3 Vliv magnetických materiálů [11] Graf 4.4 Vliv magneticky měkkých materiálů [11] 4.3.3 Vliv náklonu Vliv náklonu na měřený azimut je zřejmý z 3D reprezentace vektoru magnetického pole (Obr.](/docs-images/102/154793661/images/39-1.jpg "4.1). Při nulovém náklonu v obou horizontálních osách měří zařízení skutečné složky magnetického pole H ex a H ey.")

39 36 Graf 4.3 Vliv magnetických materiálů [11] Graf 4.4 Vliv magneticky měkkých materiálů [11] Vliv náklonu Vliv náklonu na měřený azimut je zřejmý z 3D reprezentace vektoru magnetického pole (Obr. 4.1). Při nulovém náklonu v obou horizontálních osách měří zařízení skutečné složky magnetického pole H ex a H ey. Je-li však zařízení nakloněno v některé z horizontálních os (nebo obou), měřené složky H ex a H ey nejsou již původní složky vektoru magnetického pole, ale jsou náklonem ovlivněny. Proto je nutné náklon měřit a chybu kompenzovat.
40 37 Měření závislosti chyby azimutu na náklonu bylo provedeno zvlášť pro náklon podél osy X a zvlášť podél osy Y. Pro každou osu náklonu bylo změřeno osm charakteristik lišících se nastaveným azimutem (0, 45, 90, 135, 180, 225, 270, 315 ). Výsledné charakteristiky pro náklon podél osy X jsou zobrazeny v Graf 4.5, pro náklon podél osy Y v Graf 4.6. Na ose X grafů je náklon, na ose Y je rozdíl azimutu skutečného a naměřeného. Různé barvy průběhů odpovídají různým nastaveným azimutům. δ [ ] β [ ] Graf 4.5 Chyba magnetometru při náklonu podél osy X
41 δ [ ] β [ ] Graf Chyba magnetometru při náklonu podél osy Y Z grafů je patrná silná závislost chyby azimutu na náklonu, a to jak podél osy X, tak podél osy Y. Chyba dosahuje při maximálním nastaveném náklonu i 180. Zjevná je také závislost chyby azimutu při náklonu na nastaveném azimutu. Například při naklánění podél osy Y je chyba pří nastaveném azimutu na 0 (sever) v celém rozsahu téměř nulová, až do zhruba 25 náklonu. Poté chyba strmě, téměř skokově, roste na chybu 180. Vektor magnetického pole směřuje na sever, chyba při nastaveném azimutu na sever by měla být nulová v celém rozsahu náklonu podél Y, protože Y-ová složka magnetického pole měřená modulem bude vždy nulová, a tedy i azimut je stále 0. Azimut by se změnil pouze ve chvíli, kdy bude modul přetočen o více jak 90 podél Y. V tom případě je již modul nastaven nikoli na sever, ale na jih (180 ). To, že k přetočení na jih nedojde při 90 náklonu, ale již při 25, je způsobeno tím, že vektor magnetického pole nesměřuje na sever rovnoběžně se Zemí, ale v oblasti měření (ČR) klesá k Zemi pod úhlem asi -65 (inklinace). Ostatní křivky chyby azimutu představují přechody mezi extrémy sever (0 ) a jih (180 ).
42 39 5. HW ŘEŠENÍ MODULU Zařízení je koncipováno jako modul, integrující gyroskopy, akcelerometry a magnetometr. Gyroskopy a akcelerometry obsahuje společně ADIS Tím je ušetřeno v modulu hodně místa. Magnetometr HMC1043 je součástka analogová a je třeba k ní navrhnout obvody pro zpracování signálu a dále přidat AD převodník (AD7706). Blokové schéma zapojení je na Obr Jednotlivé bloky jsou dále vysvětleny. Obr. 5.1 Blokové schéma zapojení modulu Data ze všech snímačů načítá mikroprocesor ATMEGA8. Ten také distribuuje naměřená data nadřazenému systému prostřednictvím sériové linky RS232. Zapojení konektoru modulu je na Obr Obr. 5.2 Zapojení konektoru modulu


43 40 Schéma zapojení a následně deska plošných spojů jsou vytvořeny v programu EAGLE Pro ušetření místa je většina součástek v SMD pouzdře a deska plošných spojů je oboustranná. Schéma zapojení, výrobní a osazovací plány desky jsou uvedeny v Příloha 1, Příloha 2 a Příloha 3. Na Obr. 5.3 je zobrazen pohled na hotový modul. Obr. 5.3 Pohled na hotový modul 5.1 ADIS16350 Snímač ADIS16350 [2] je vyroben v kompaktním hliníkovém pouzdře o rozměrech zhruba 23x23x23mm. Na spodní straně je ještě opatřen výstupky pro uchycení šrouby. Přesné rozměry a tvar je na Obr Obr. 5.4 Pouzdro snímače ADIS16350 [2]
44 41 Komunikace a napájení modulu se děje přes 24-pinový konektor. Ten je uchycen na pružném kabelu. Bohužel konektor nemá běžné (pro ČR) rozestupy pinů 1.27mm, ale pouze 1mm. Sehnání protikusu ke konektoru se ukázalo jako veliký problém. Potřebný konektor vyrábí americká firma SAMTEC pod označením CLM F-D-P. Ta však výrobky prodává pouze po tisícovkách kusů. Naštěstí česká firma ATD ELEKTRONIK s.r.o. poskytla dva konektory jako vzorky zdarma. Protože konektory byly k dispozici pouze dva a jejich další nákup by byl více než problematický, byla vytvořena redukce z CLM F-D-P na obyčejnou 7- pinovou lámací lištu. Většina pinů konektoru je totiž nezapojených a pro ovládání součástky stačí pouze sedm. Redukce je koncipována jako oboustranná deska plošných spojů, kde z jedné strany je napájen konektor CLM F-D-P a z druhé strany lámací lišta. Propojeny jsou prokovy v desce. Mezi vývody napájení jsou připojeny ještě odrušovací kondenzátory 100nF a 10µF. 5.2 OBVODY PRO HMC1043 Magnetometr HMC1043 [8] je vyráběn v pouzdru 16-PIN LPCC (Obr. 5.5). Jeho malé rozměry a umístění pájecích plošek v podstatě vylučuje napájení na desku v amatérských podmínkách. Proto byla vytvořena redukce z 16-PIN LPCC na DIL16. Její výrobu zajistila externí firma. Číslování pinů na redukci odpovídá číslování vlastní součástky. Obr. 5.5 Pouzdro snímače HMC1043 [8]
45 Obvod SET/RESET Jak bylo řečeno v předchozím, pro kompenzaci offsetu je využito SER/RESET cívek magnetometru. Cívky jsou tvořeny odporovou vrstvou ve tvaru spirály. Při průchodu proudu spirálou se vytvoří magnetické pole, které svojí velikostí musí překonat měřící pole. Je-li toto splněno, magnetické domény v magnetorezistivním materiálu se natočí podle cívkami vytvořeného pole. Po jeho odeznění se opět domény magnetují podle měřícího pole. Podle výrobce by proudový puls měl trvat asi 2μs a jeho velikost by neměla přesáhnout 8A [9]. Při napájecím napětí 5V a odporu SET/RESET cívky v rozpětí 1,5 až 3Ω, je maximální možný proud 3,3A [8], což nepřesahuje maximální hodnotu danou výrobcem. Délku trvání pulsu lze nastavit jednoduše doplněním cívky o sériově zapojený kondenzátor, čímž vznikne derivační článek. Ten generuje napěťové pulsy o délce trvání τ = R C. Pro odpor SET/RESET cívky v rozsahu 1,5 až 3Ω a délce trvání 2μs vychází kondenzátor o velikosti 660nF (délka trvání pulsu 0,99 až 1,9μs). Na Obr. 5.6 je schéma navrženého obslužného obvodu pro SET/RESET cívku (návrh podle [9]). Obr. 5.6 Obslužný obvod SET/RESET cívky
46 43 Derivační článek tvoří odpor cívky a dva paralelně zapojené svitkové kondenzátory 330nF. Kladný a záporný puls je generován dvěma MOSFETovými tranzistory. Je-li na báze tranzistorů přivedeno kladné napětí, otevře se horní tranzistor a je generován kladný puls, při záporném napětí na bázích je otevřen spodní tranzistor a polarita pulsu je záporná. Elektrolytický kondenzátor zabraňuje průchod proudových špiček do dalších částí zařízení Napěťový zesilovač Výstupní signál snímače je v podstatě rozdíl napětí na dvou děličích Wheatstonova můstku. Předmětem měření je, napětím reprezentované, rozvážení můstku. Zesilovač tedy musí zesilovat rozdíl dvou výstupních napětí z jednoho snímače. K tomu účelu slouží diferenční zesilovač podle Obr Obr. 5.7 Diferenční zesilovač Výstupní napětí zesilovače je rovno 1M ([ OUT + X ] [ OUT X ]) + REF. 3k9 Rozdíl napětí z můstku snímače je zesílen asi 256krát. Na výstupu zesilovače je nulový rozdíl vstupních napětí reprezentován hodnotou napěťové reference (REF) 2,5V. A to proto, že rozdíl vstupních napětí může nabývat jak kladných tak záporných hodnot. Tímto opatřením je nulový výstup přenesen doprostřed měřícího
47 44 rozsahu AD převodníku (5V). Při maximálním možném rozdílu vstupních signálů ±6mV je výstupní signál zesilovače v rozsahu 0,96 až 4,04V. Samotný operační zesilovač TLC274 je napájen napětím vyšším než 5V (při testech 8V), aby nemohlo dojít k saturaci výstupu zesilovače a tím zkreslení měření (při výstupním signálu blízkému 5V). Vyšší napájecí napětí operačního zesilovače však způsobí, že výstup může přesáhnout 5V. To se stane při vystavení snímače magnetickému poli o vyšší intenzitě, než je pole zemské. Proto je na výstupu zesilovače ještě zařazena dioda, která omezí výstupní napětí na 0 až 4,3V. Popsaný zesilovač je v modulu obsažen třikrát (tři měřené osy) AD převodník AD7706 Pro převod napěťového signálu do číslicové podoby byl vybrán AD převodník firmy Analog Devices AD7706 [12]. Jde o 16ti bitový sigma-delta převodník. Blokové schéma je zobrazeno na Obr Obr. 5.8 Blokové schéma AD7706 [12]
48 45 Převodník AD7706 disponuje třemi analogovými vstupy. Měřicí rozsah se nastavuje napětím na referenčních vstupech, a to až do rozsahu 5V. Výstupní rozhraní je digitální, protokol SPI. Vnitřní kontrolér je taktován vnějším krystalem připojeným na pinech MCLK. Navíc je zde výstup signalizující dokončení převodu a vstup resetu kontroléru. Obr. 5.9 Zapojení AD7706 Na Obr. 5.9 je použité zapojení převodníku AD7706. Na vstupní analogové piny (AIN) jsou přivedeny výstupní signály zesilovačů. Vstup COM je protipól k AIN. Je na něj přivedena napěťová reference od zesilovačů (2,5V). Převádí se napětí mezi příslušným vstupem AIN a COM. Toto napětí je v rozsahu ±2,5V. Jako referenční napětí převodníku je použita napěťová reference LT1004CS-2,5 [13]. Její výstupní napětí je 2,5V. Převodník tedy převádí vstupní napětí v rozsahu ±2,5V. Pro taktovací hodiny vnitřního kontroléru byl použit krystal 2,4567MHz. Výstupem AD převodníku je rozhraní SPI (SCL-hodinový signál, DIN-vstup data, DOUT-výstup data, CS-aktivace rozhraní obvodu), vstup RES pro reset vnitřního kontroléru a výstup DRDY signalizující dokončený převod. 5.3 ATMEGA8 Pro zpracování dat ze všech použitých snímačů je použit mikroprocesor ATMEGA8 v SMD pouzdře [14]. Schéma zapojení je na Obr
49 46 Obr Zapojení mikroprocesoru ATMEGA8 Pro taktování procesoru je použit externí krystal 11,0592MHz. Jeho velikost je volena s ohledem na časování sériové linky RS232. Právě při této taktovací rychlosti je časování asynchronní sériové linky nejpřesnější a umožňuje využít maximální přenosové rychlosti. Z procesoru jsou vyvedeny piny linky RS232 na výstupní konektor (RXD, TXD). Dále je vyvedeno rozhraní SPI (DIN, DOUT, SCL). To je přivedeno na SPI rozhraní součástky ADIS16350 a zároveň na AD převodník AD7706. Protože toto rozhraní neumožňuje softwarové adresování zařízení, jsou ještě k příslušným zařízením rozvedeny adresovací signály (CS_AD, CS_AG). Signály pro reset ADIS16350 a AD převodníku mají označení RES_AG a RES_AD. Příznak dokončeného převodu AD převodníku je přiveden na pin označený DRDY. Posledním výstupním signálem je SET/RESET obsluhující obvod vysílání pulsů do magnetometru.
50 47 6. SW ŘEŠENÍ MODULU Software modulu se skládá ze softwarového vybavení ADIS16350, AD převodníku AD7706 a mikroprocesoru ATMEGA8. První dvě zmíněné součástky nelze programovat, jejich software je pevně dán výrobcem. Je však možné provádět různá nastavení (k zajištění požadované funkce) prostřednictvím komunikačního rozhraní SPI. Pro mikroprocesor ATMEGA8 byl navržen program zajištující načítání dat a jejich distribuci prostřednictvím asynchronní sériové linky. 6.1 ADIS16350 [2] Čtení naměřených dat a nastavování ADIS16350 se děje prostřednictvím čtení a zápisu do registrů. Komunikačním prostředkem je rozhraní SPI, kde ADIS16350 je zařízení SLAVE. Komunikaci tedy vždy iniciuje MASTER. Datový rámec je 16-bitový. Adresa registrů je 6-bitová. Pod každou adresou je 8-bitový datový registr. Dva sousední datové registry tvoří vždy jeden 16-bitový. Na Obr. 6.1 je zobrazen příklad zápisu a čtení. MASTER vysílá data na linku DIN a přijímá na DOUT. Zařízení SLAVE funguje přesně opačně. V horní polovině Obr. 6.1 je zobrazen zápis do registru. První vyslaný bit je příznak, zda se bude číst nebo zapisovat. V případě zápisu je bit roven jedné. Následuje nulový bit a 6-bitová adresa registru. Posledních osm bitů datového rámce obsahuje data pro zápis. V dolní polovině Obr. 6.1 je znázorněno čtení z registru. První vyslaný příznak bude roven nule (zápis). Následuje opět nulový bit a 6-bitová adresa registru. Na posledních osmi bitech datového rámce nezáleží. V následujícím datovém rámci jsou požadovaná data načtena z přijímací linky. Přijat je celý 16-bitový registr (tvořen dvěma sousedními 8-bitovými). Adresovat je možné kterýkoli ze dvou adresových registrů tvořících požadovaný 16-bitový registr.
51 48 Obr. 6.1 Komunikace s ADIS16350 [2] Datové registry je možné rozdělit na výstupní registry, obsahující naměřená data, a registry nastavovací. Data ve výstupních registrech jsou periodicky přepisována novými naměřenými daty, a to s nastavenou periodou vzorkování. Struktura výstupních registrů je patrná z Obr Bit ND značí aktuálnost dat v registru, neboli že data v registru obsažená nebyla z modulu dosud čtena. Příznak EA značí systémovou chybu nebo příznak alarmu (pokles napájení, překročení nějaké měřené veličiny přes nastavenou mez, ). Dalších 14 bitů obsahuje přímo data příslušné měřené veličiny. Obr. 6.2 Struktura výstupního registru ADIS16350 [2]
52 49 Naměřená data jsou pro čtení přístupná v registrech podle Tab Název registru Adresa (horní, spodní byte) Délka dat Měření velikosti napájecího napětí 0x03, 0x02 12 bitů Osa X gyroskopu 0x05, 0x04 14 bitů Osa Y gyroskopu 0x07, 0x06 14 bitů Osa Z gyroskopu 0x09, 0x08 14 bitů Osa X akcelerometru 0x0B, 0x0A 14 bitů Osa Y akcelerometru 0x0D, 0x0C 14 bitů Osa Z akcelerometru 0x0F, 0x0E 14 bitů Teplota osy X gyroskopu 0x11, 0x10 12 bitů Teplota osy Y gyroskopu 0x13, 0x12 12 bitů Teplota osy Z gyroskopu 0x15, 0x14 12 bitů Vstup AD převodníku 0x17, 0x16 12 bitů Tab. 6.1 Výstupní registry ADIS16350 Některá data jsou dlouhá pouze 12 bitů, v tom případě je dobré poslední dva bity datového rámce vymaskovat, nelze se spoléhat na jejich nulovost. Přehled nastavovacích registrů je v Tab Název registru Počítadlo zápisu do FLASH paměti Offset gyroskopu osy X Offset gyroskopu osy Y Offset gyroskopu osy Z Offset akcelerometru osy X Offset akcelerometru osy Y Offset akcelerometru osy Z Mezní hodnota pro alarm 1 Mezní hodnota pro alarm 2 Adresa 0x00, 0x01 0x1A, 0x1B 0x1C, 0x1D 0x1E, 0x1F 0x20, 0x21 0x22, 0x23 0x24, 0x25 0x26, 0x27 0x28, 0x29
53 50 Vzorkovací perioda pro alarm 1 Vzorkovací perioda pro alarm 2 Řídící registr pro alarmy Data z AD převodníku Řídící registr pro dva I/O piny Další možnosti nastavení Nastavení vzorkovací frekvence Nastavení dynamických vlastností Nastavení módu spánku Systémový stav Systémové příkazy 0x2A, 0x2B 0x2C, 0x2D 0x2E, 0x2F 0x30, 0x31 0x32, 0x33 0x34, 0x35 0x36, 0x37 0x38, 0x39 0x3A, 0x3B 0x3C, 0x3D 0x3E, 0x3F Tab. 6.2 Registry nastavení pro ADIS16350 Do registrů offsetu je možné zapsat naměřenou hodnotu offsetu příslušného snímače a osy. Jeho hodnota bude poté automaticky odečítána od naměřených hodnot. Dále je možné použít dva konfigurovatelné alarmy. Každý z nich je možné nastavit na libovolnou měřenou veličinu (pomocí řídícího registru), nastavit její mezní hodnotu spuštění alarmu a vzorkování měřené veličiny pro alarm. ADIS16350 obsahuje i jeden analogový vstup. Měří napětí v rozsahu 0-2,5V a měřenou hodnotu je možné číst z registrů 0x30 a 0x31. Součástí jsou i dva vstupně-výstupní piny plně konfigurovatelné svým řídícím registrem. V registru dalších možností nastavení je možné (mimo jiné) nastavit dva I/O piny jako příznaky dokončeného měření. Nastavením dynamických vlastností je myšlen výběr rozsahu měření gyroskopu (300 /s, 150 /s, 75 /s) a nastavení interního FIR filtru. Registr systémový stav obsahuje příznaky signalizující nejrůznější chybové stavy: chyba diagnostiky jednotlivých gyroskopů a akcelerometrů, aktivace alarmů,
54 51 chyba vlastní diagnostiky, překročení rozsahu některého snímače, chyba komunikace SPI, překročení napájecího napění a pokles napětí. Registrem systémové příkazy je možné zařízení restartovat, obnovit tovární nastavení nebo spustit automatické zjištění offsetů. Uvedené vysvětlení je pouze orientační, podrobnější informace v [2]. 6.2 AD7706 [12] Komunikace s AD převodníkem AD7706 probíhá přes komunikační rozhraní SPI. Převodník se chová jako zařízení typu SLAVE. Komunikaci vždy iniciuje MASTER zápisem do komunikačního registru podle Tab DRDY RS2 RS1 RS0 R/W STBY CH1 CH0 Tab. 6.3 Komunikační registr Do DRDY musí být vždy zapisována nula, v opačném případě zastaví převodník svoji činnost. Trojicí bitů RS se volí, s kterým za dalších registrů se bude dále pracovat (Tab. 6.4). (vypsány jsou pouze důležité registry). Následuje příznak (R/W) určuje zda se bude jednat o zápis (0) nebo čtení (1). Zápisem jedničky do bitu STBY přejde převodník do úsporného módu s odběrem pouze 10µA. Poslední dvojice bitů CH určuje, který vstupní signál má být převeden do datového registru (Tab. 6.5). RS2 RS1 RS0 Registr Počet bitů Komunikační registr 8 bitů Registr nastavení 8 bitů Registr časování 8 bitů Datový registr 16 bitů Tab. 6.4 Výběr registru AD7706
55 52 CH1 CH0 Vstup Reference 0 0 AIN1 COMMON 0 1 AIN2 COMMON 1 0 COMMON COMMON 1 1 AIN3 COMMON Tab. 6.5 Výběr kanálu AD převodníku Registr nastavení má strukturu podle Tab Dvojicí bitů MD lze nastavit mód AD převodníku. Při kombinaci bitů 0-0 (MD1-MD0) je nastaven normální mód převodu, ten je využíván při provozu převodníku. Kombinace 0-1, 1-0 a 1-1 spouští různé druhy automatických kalibracích na kanálu určeném bity CH1 a CH0. Trojice bitů G nastavuje zesílení vstupního signálu v rozsahu Bit B/U vybírá nastavení převodníku na bipolární nebo unipolární provoz. Bitem BUF je možné zapnout funkci přidržování vstupního signálu na stejné hodnotě v průběhu převodu. Zápisem 0 do bitu FSYNC je spuštěn proces převodu a zpracování dat ze vstupů. MD1 MD0 G2 G1 G0 B/U BUF FSYNC Tab. 6.6 Registr nastavení Registr časování je ve tvaru podle Tab Do první trojice bitů ZERO musí být vždy zapsány nuly, zápis jedničky může způsobit chybnou činnost převodníku. Zápisem jedničky do bitu CLKDIS jsou odpojeny externí hodiny, pin MCLK OUT přechází na úroveň low. Bit CLKDIV dělí vstupní hodinový signál dvěmi, je-li nastaven na jedničku. Bit CLK určuje, zda frekvence hodinového signálu je 2,4576MHz (log. 1) nebo 1MHz (log. 0). Tento bit společně s poslední dvojicí FS určuje frekvenci převodu a zároveň nastavení interního dolno-frekvenčního filtru. Nastavení určuje Tab ZERO ZERO ZERO CLKDIS CLKDIV CLK FS1 FS0 Tab. 6.7 Registr časování
56 53 CLK FS1 FS0 Frekvence převodu Frekvence útlumu -3dB Hz 5,24 Hz Hz 6,55 Hz Hz 26,2 Hz Hz 52,4 Hz Hz 13,1 Hz Hz 15,7 Hz Hz 65,5 Hz Hz 131 Hz Tab. 6.8 Nastavení frekvence převodu a filtru Z důvodu filtrace signálu jsou data ve výstupním registru reálně aktualizována s frekvencí třetinovou, než je frekvence převodu. V datovém registru jsou uložena data z posledního převodu. Převod požadovaného kanálu se spouští zápisem příslušného čísla kanálu (CH1, CH0) do komunikačního registru. Ostatní bity zůstávaní nulové (další příkaz bude opět zápis do komunikačního registru). Po dokončení převodu změní AD převodník stav příznaku DRDY na nulu. Ten je možné pravidelně kontrolovat čtením komunikačního registru nebo testováním příslušného výstupního pinu DRDY. Je-li tedy tento bit (nebo pin) nulový, převod je dokončen a dalším zápisem do komunikačního registru je nastaveno čtení z datového registru a příslušná data jsou vyčtena. 6.3 ATMEGA8 Mikroprocesor ATMEGA8 je v aplikaci použit pro sběr dat ze snímačů a jejich přenos do nadřazeného systému (PC).
57 Načítáni dat Načítání dat se děje výhradně přes rozhraní SPI. Údaje od akcelerometrů a gyroskopů jsou k dispozici v součástce ADIS16350, údaj o azimutu v AD převodníku AD7706. K oběma součástkám se přistupuje přes rozhraní SPI. To však neumožňuje adresování zařízení, proto je výběr součástky pro komunikaci prováděn přes adresovací signály (CS_AD AD7706, CS_AG ADIS16350). Rozhraní SPI je nastaveno podle následujících parametrů: Frekvence signálu SCL: 691,2 khz Data vysílaná: na první hodinový impuls Polarita SCL při klidovém stavu: log. 1 Směr dat: MSB první Vzhledem k faktu, že data z gyroskopu je třeba integrovat, musí načítání příslušných dat probíhat pravidelně a co možná nejrychleji. Na druhé straně musí být zajištěno, aby všechna načtená data byla přesunuta do PC přes RS232. Jelikož asynchronní sériová linka je výrazně pomalejší než SPI, je ona tím limitujícím faktorem pro vzorkovací frekvenci načítání dat. Při pokusech se jako maximální vzorkovací frekvence osvědčilo 400Hz. Přesné vzorkování je zajištěno časovačem s nastaveným přerušením při přetečení. Výpočet nastavené hodnoty pro čítač je podle (6.1) [14]. V rutině přerušení se prování načítání dat přes SPI. f osc MHz N = = = f 400 Hz vz N nastaveni čítacího registru časovače; [ ] f osc - taktovací frekvence procesoru; [ Hz ] f vz - požadovaná vzorkovací frekvence; [ Hz ] maximální hodnota 16-ti bitového čísla; [ ] (6.1)
58 55 Načtení jednoho 16-bitového datového registru z ADIS16350 probíhá podle následujícího úseku kódu: PORTD.4 = 0; delay_us(1); temp = (unsigned int)(spi(0x05))<<8; temp += (unsigned int)(spi(0x00)); delay_us(1); PORTD.4 = 1; delay_us(10); Na pin procesoru PORTD.4 je připojen CS_AG (výběr komunikace s ADIS16350). Součástka se aktivuje, je-li tento signál stažen na log. 0. Následuje zpoždění 1µs pro inicializaci ADIS16350 a dále načtení nejprve horního bytu a poté spodního bytu výsledného 16-bitového slova. Nakonec se deaktivuje rozhraní SPI pro ADIS Zpoždění 10µs je nutné dodržet před další komunikací se součástkou. Funkce spi() zároveň vysílá i přijímá data. Vysílá hodnotu v argumentu funkce a přijatá data vrací jako návratovou hodnotu. Data, vyslána v ukázkovém kódu, adresují výstupní registr gyroskopu osy X (Tab. 6.1). Data z tohoto registru budou přijata až v dalším kroku načítání dat. Do proměnné temp se uloží data z registru adresovaného v minulém kroku. Tímto postupem jsou ze součástky ADIS16350 vyčteny postupně data z gyroskopů a akcelerometrů všech os (celkem šest 16-bitových slov) a jedno slovo, které obsahuje střídavě údaj o teplotě osy X, Y, Z a údaj o napájecím napětí. Tyto hodnoty není nutné vzorkovat tak rychle jako gyroskopy, proto je v každém vzorkovacím cyklu načtena pouze jedna z nich. Vzorkovací frekvence těchto dat je tedy dělena čtyřmi (100Hz). Přerušovací rutina obsahuje ještě následující úsek kódu pro načítání dat z AD převodníku AD7706:
59 56 if (PINC.2==0) { if (++i==4) i=0; PORTC.0 = 0; spi(i+0x38); an = (unsigned int)(spi(0xff))<<8; an += (unsigned int)(spi(0xff)); spi(i==3? 0x00 : i+1); PORTC.0 = 1; } Na pin procesoru PINC.2 je připojen příznak dokončeného převodu AD převodníku DRDY, na PORTC.0 je připojen CS_AD. Je-li aktivován příznak dokončeného převodu (aktivní v nule), je připravena hodnota signálu na kanálu adresovaného v minulém průchodu touto funkcí. Data jsou adresována příslušným zápisem do komunikačního registru (spi(i+0x38)), následně je načteno 16-bitové slovo do proměnné an. Nakonec je vyslána adresa dalšího kanálu, z něhož má být signál převeden. Tímto způsobem se postupně v každém přerušovacím cyklu načte jedna ze čtyř hodnot, které AD převodník měří (signály na vstupech AIN1, AIN2, AIN3 a COMMON). Vzorkovací frekvence převodu AD převodníku je nastavena na 500Hz (Tab. 6.8). Jak bylo zmíněno, data jsou aktualizována s frekvencí třetinovou, tedy 166,6Hz. Přerušovací rutina je volána s frekvencí 400Hz, data z AD převodníku budou tedy načítána každé třetí volání, tedy s frekvencí 133,3Hz. Načítány jsou čtyři hodnoty. Kompletní set dat pro výpočet azimutu je tedy k dispozici s frekvencí 33,3Hz. Tímto končí přerušovací rutina. Nastaven je ještě příznak nových dat, který spouští vysílání dat do PC.
60 Distribuce dat Pro přenos dat do počítače je využita asynchronní sériová linka RS232 (TXD, RXD). Nastavena je podle následujících parametrů: Datový rámec: 8 bitů Počet stop bitů: 1 Parita: žádná Rychlost 38400Bd Rychlost je nastavena maximální, aby bylo možné dosáhnout velké vzorkovací frekvence dat. Pro zajištění přesného časování asynchronní sériové linky bylo nutné použít pro taktování procesoru krystal 11,0592MHz. Pokud je nastaven příznak nových načtených dat, je naplněn vysílací buffer a je zahájeno vysílání naměřených dat. První byte obsahuje informaci, který z nepravidelně vzorkovaných dat je právě vysílán. Spodní polovina bytu informuje, zda byla vyslána teplota osy X, Y, Z nebo hodnota napájecího napětí. Horní polovina bytu zase nese informaci, který kanál AD převodníku je zvolen (AIN1, AIN2, AIN3 nebo COMMON). Následuje sada bytů s naměřenými daty. Vždy nejdříve horní osmice bitů, po ní spodní osmice. Data jsou vysílána v následujícím pořadí: Gyroskop osy X Gyroskop osy Y Gyroskop osy Z Akcelerometr osy X Akcelerometr osy Y Akcelerometr osy Z Teplota X / Teplota Y / Teplota Z / Napájecí napětí AIN1 / AIN2 / AIN3 / COMMON
61 Řízení běhu programu mikroprocesoru Po asynchronní sériové lince přijímá řídící aplikace v PC data, ale také po ní řídí běh programu v mikroprocesoru. Řízení spočívá ve vysílání jednobytových povelů podle následující části kódu: if (rx_flag) { switch (rx_data) { case 'O' : TCCR1B=0x01; break; case 'F' : TCCR1B=0x00; break; case 'R' : PORTC.3 = 0; break; case 'S' : PORTC.3 = 1; break; default : putchar('e'); break; }; rx_flag=0; }; Je-li přijat nějaký byte po RS232, je uložen do rx_data a je nastaven příznak rx_flag. V hlavím programu je tento příznak testován. Je-li aktivní, přistoupí se k identifikaci příkazu (příkazy jsou vysílány v ASCII): O start načítání a vysílání dat (spustí časovač) F stop načítání a vysílání dat (zastaví časovač) R vyšle reset puls do magnetometru S vyšle set puls do magnetometru Přijde-li jiný byte, není provedena žádná akce a zpět je vyslán znak E.

62 59 7. SW ŘEŠENÍ ŘÍDÍCÍ APLIKACE Řídící aplikace je naprogramována v prostředí Borland C++ Builder. Má za úkol sběr, zpracování a zobrazování měřených dat. Byly vytvořeny dvě verze: Měřící a vizualizační aplikace. 7.1 MĚŘÍCÍ APLIKACE Měřící aplikace je koncipována jako vývojová. Zobrazována jsou všechna měřená data, ale pouze v číselné podobě. Je zde možnost určit, která data se budou ukládat do souboru pro pozdější zpracování (např. vykreslení grafů). Na Obr. 7.1 je okno měřící aplikace. Jednotlivé prvky jsou očíslovány a v dalším textu vysvětleny. Obr. 7.1 Okno měřící aplikace
63 60 1. Zobrazení úhlů natočení od gyroskopu osy X, Y, Z. Rozsah 0 až Volba zobrazování úhlů natočení gyroskopů nebo přímo úhlových rychlostí, měřených gyroskopy. 3. Zobrazení změřených offsetů gyroskopů. 4. Spuštění rutiny měření offsetů gyroskopů. 5. Uložení změřených offsetů gyroskopů do souboru. Při dalším spuštění aplikace budou znovu načteny. 6. Zobrazení úhlů natočení od akcelerometrů osy X, Y, Z. Rozsah 0 až Volba zobrazování úhlů natočení akcelerometrů nebo přímo zrychlení. 8. Zobrazování dat od magnetometru. Hodnota magnetického pole v ose X, Y, Z, referenční potenciál (COMMON) a vypočtená hodnota azimutu. 9. Zapnutí/Vypnutí kompenzace náklonu magnetometru. 10. Spuštění SET/RESET offsetové kompenzace magnetometru. 11. Zobrazení kalibračních údajů Hard Iron kompenzace. 12. Start/Stop Hard Iron kalibrace. 13. Uložení kompenzačních údajů Hard Iron kalibrace do souboru. Při dalším spuštění aplikace budou znovu načteny. 14. Zapnutí/Vypnutí Hard Iron kompenzace. 15. Zobrazení teplot gyroskopických os X, Y, Z a hodnoty napájecího napětí. 16. Zapnutí/Vypnutí teplotní kompenzace gyroskopu a akcelerometru. 17. Zapnutí/Vypnutí kompenzace integrální chyby gyroskopů. 18. Start/Stop ukládání dat do souboru. Ukládána jsou data, u nichž je zaškrtnuto políčko vpravo od zobrazované hodnoty. 19. Kontrola příznaků ND a EA z dat od ADIS Start měření a načítání dat. 21. Stop měření a načítání dat. 22. Zobrazování provedených akcí. 23. Vymazání zápisu provedených akcí.

64 VIZUALIZAČNÍ APLIKACE Vizualizační aplikace je koncipována jako uživatelská. Graficky zobrazuje úhly natočení z gyroskopů, textově potom i úhly natočení z akcelerometrů a magnetometru k příslušné gyroskopické ose. Umožňuje samozřejmě zapínání všech implementovaných kompenzací a provádění kalibrací. Na Obr. 7.2 je okno vizualizační aplikace. Jednotlivé prvky jsou očíslovány a v dalším textu vysvětleny. Obr. 7.2 Okno vizualizační aplikace 1. Grafické zobrazení úhlu gyroskopu osy X. 2. Grafické zobrazení úhlu gyroskopu osy Y. 3. Grafické zobrazení úhlu gyroskopu osy Z.
65 62 4. Číselné zobrazení úhlu gyroskopu osy X. 5. Číselné zobrazení úhlu gyroskopu osy Y. 6. Číselné zobrazení úhlu gyroskopu osy Z. 7. Číselné zobrazení úhlu od akcelerometru osy X. 8. Číselné zobrazení úhlu od akcelerometru osy Y. 9. Číselné zobrazení úhlu natočení od magnetometru (osa Z). 10. Zobrazení změřených offsetů gyroskopů. 11. Spuštění rutiny měření offsetu gyroskopů. 12. Uložení změřených offsetů gyroskopů do souboru. Při dalším spuštění aplikace budou znovu načteny. 13. Zobrazení kalibračních údajů Hard Iron kompenzace. 14. Start/Stop Hard Iron kalibrace. 15. Uložení kompenzačních údajů Hard Iron kalibrace do souboru. Při dalším spuštění aplikace budou znovu načteny. 16. Spuštění SET/RESET offsetové kompenzace magnetometru. 17. Zapnutí/Vypnutí Hard Iron kompenzace. 18. Zobrazení teplot gyroskopických os X, Y, Z a hodnoty napájecího napětí. 19. Kontrola příznaků ND a EA z dat od ADIS Zapnutí/Vypnutí teplotní kompenzace gyroskopu a akcelerometru. 21. Zapnutí/Vypnutí kompenzace integrální chyby gyroskopů. 22. Zapnutí/Vypnutí kompenzace náklonu magnetometru. 23. Stop měření a načítání dat. 24. Start měření a načítání dat. 25. Zobrazování provedených akcí.
66 MĚŘICÍ A KOMPENZAČNÍ POSTUPY V této kapitole budou vysvětleny algoritmy převodu naměřených dat na skutečné hodnoty fyzikálních veličin. Dále pak filtrace signálu pro potlačení šumu, použité postupy kalibrace jednotlivých snímačů a vzájemné kompenzace Převod dat na fyzikální veličiny Načtená data z gyroskopů jsou ve tvaru 14-bitového znaménkového čísla. Převod na rychlost úhlového pohybu je podle rovnice (7.1) [2]. N g 0,07326 ω g = Bg (7.1) 400 ω - rychlost úhlového pohybu; [ 400 / s] g N g - data z gyroskopu; [ ] B - offset příslušného gyroskopu; [ 400 / s] g Konstanta 0,07326 je katalogová citlivost gyroskopu při nastaveném dynamickém rozsahu ±300 /s. Dělení číslem 400 představuje dělení vzorkovací frekvencí. Dále se bude totiž rychlost integrovat. Offsety gyroskopů jsou získány příslušným kalibračním postupem. Převod na úhel natočení se děje prostým sčítání vzorků. Načtená data z akcelerometrů jsou také ve tvaru 14-bitového znaménkového čísla. Převod na zrychlení se děje podle rovnice (7.2) [2]. a = N a 0, (7.2) a - zrychlení; [ g] N a - data z akcelerometru; [ ] 0, katalogová citlivost akcelerometru; [ g ]
67 64 Tímto způsobem jsou vypočtena zrychlení všech tří os. Následuje filtrace (viz. dále). Předmětem zájmu jsou úhly natočení kolem osy X a Y (rovnoběžné se Zemí). Pro převod zrychlení na úhly natočení vzhledem k vodorovné poloze je použita funkce atan2. Výpočet je naznačen rovnicemi (7.3). ), tan 2( ), tan 2( y z y x z x a a a a a a = = α α (7.3) x α y α, - úhly natočení od akcelerometrů os X a Y; [ ] z y x a a a,, - zrychlení v osách X, Y a Z; [ ] 2 s m Data z magnetometru jsou ve tvaru 16-ti bitového čísla. K výpočtu je k dispozici hodnota úměrná magnetickému poli v ose X, Y a Z. Dále offsety příslušných os (získané SET/RESET kalibrací). Výpočet je dán rovnicemi (7.4). = = < = = > = < = = > = = < < = > = > < = = = z y x z y x z y x z y x x y z y x x y z y x x y z y x z z z y y y x x x S a S S a S S a S S a S S S arctg S a S S S arctg S a S S S arctg S a S O M S O M S O M S α α α α α α α (7.4) z y x M M M,, - hodnoty úměrné magnetickému poli v osách X, Y, Z; [ ] z y x O O O,, - offsety pro osy X, Y, Z získané SET/RESET kalibrací; [ ] z y x S S S,, - hodnoty úměrné magnetickému poli bez vlivu offsetu; [ ] z α - úhel odklonu od severu azimut; [ ]
68 65 Údaje o teplotách gyroskopických os jsou 12-ti bitová. Nulová hodnota dat odpovídá teplotě 25 C. Přepočet na teplotu je podle rovnice (7.5) [2]. T = N t 0, (7.5) T - teplota příslušné osy; [ C] N t - změřená hodnota úměrná teplotě; [ ] 0,1453 katalogová citlivost teplotního snímače; [ C] Hodnota úměrná napájecímu napětí je také 12-ti bitová, přičemž přepočet na skutečnou hodnotu napájecího napětí je podle rovnice (7.6) [2]. U N 0, (7.6) pwr = u U pwr - velikost napájecího napětí; [ V ] N u - změřená hodnota úměrná napájecímu napětí; [ ] 0, katalogová citlivost převodníku napětí; [ V ] Filtrace signálu Protože měřené veličiny jsou hodně zašuměné, je třeba je filtrovat filtrem typu dolní propust. Pro jednoduchost návrhu i implementace byly vytypovány dva druhy filtrů: IIR a FIR [15]. Filtry s nekonečnou impulsní odezvou (IIR) mají obecný přenos podle (7.7). F IIR b p + b p ( n) ( n 1) n n 1 = ( m) ( m 1) am p + am 1 p b1 p + b a p + a 1 0 (7.7) Výhodou je nízký řád filtru oproti FIR. Udává se, že stejné kmitočtové vlastnosti jako má navržený IIR, lze dosáhnout FIR filtrem s desetinásobným řádem. Dochází k úspoře paměťových nároků.
69 66 Z přenosu je patrné, že obecně může přenos obsahovat póly mimo jednotkovou kružnici, tudíž může být přenos nestabilní. V této práci je třeba návrh filtru na filtrování od nízkých frekvencí (řádově jednotky Hz). V tomto případě jsou póly navrženého filtru velice blízko jednotkové kružnice a minimální nepřesnost v koeficientech znamená přechod do nestabilní části, což má za následek růst výstupu filtru k nekonečnu. Z důvodu hrozící nestability nebyl tento filtr nakonec použit. Filtry s konečnou impulsní odezvou (FIR) mají obecný přenos podle (7.8). F FIR b = n p ( n) + b n 1 p ( n 1) p ( n) b 1 p + b 0 (7.8) Přenos FIR filtru má n-násobný pól v nule. Z toho plyne velká výhoda tohoto typu filtru: je vždy stabilní. Nevýhodou je potřeba velkého řádu filtru pro zajištění požadovaných frekvenčních vlastností. Stěžejní je však stabilita použitého filtru. Program je prováděn v PC, paměťové nároky tedy nejsou velký problém. Z těchto důvodů je použit pro filtraci šumu z naměřených dat FIR filtr. Pro návrh filtru je použit program Matlab. Obsahuje přímo funkce, které automaticky navrhnou FIR filtr podle zadaných parametrů. Filtrovat je potřeba data z akcelerometrů, magnetometru a údaje o teplotě. Data z gyroskopů jsou integrována, filtrace by byla nežádoucí. U akcelerometrů jsou filtrována data po přepočtu na zrychlení, u magnetometru přímo naměřená data a údaj o teplotě po přepočtu na teplotu. Každý z filtrovaných signálů je vzorkován jinou frekvencí a i požadavky na dynamiku jsou jiné. Proto je navržen FIR filtr pro každou měřenou veličinu zvlášť. Navržené parametry dolní propusti pro jednotlivé měřené veličiny jsou uvedeny v Tab. 7.1.
70 67 Akcelerometry Magnetometr Teploty Vzorkovací frekvence 400Hz 133,3Hz 100Hz Mezní kmitočet 5Hz 5Hz 1Hz Řád filtru Tab. 7.1 Parametry FIR filtrů Funkce Matlabu pro výpočet FIR filtru má tvar podle (7.9). f d B = fir1 ( N, 2, W ) (7.9) f vz B - matice koeficientů čitatele přenosu FIR filtru; [ ] N - řád filtru; [ ] f d - mezní kmitočet dolní propusti; [ Hz ] f vz - vzorkovací frekvence; [ Hz ] W - specifikace požadovaného okna FIR filtru; [ ] Kromě nastavených parametrů charakterizuje každý FIR filtr i tvar okna. To je odezva filtru na jednotkový impuls, tzv. impulsní charakteristika. Je stejně dlouhá jako je řád filtru. Tvar použitého okna ovlivňuje frekvenční vlastnosti. Pro účely práce byly testovány tři základní druhy oken: pravoúhlé, trojúhelníkové a Hammingovo okno. Výsledné frekvenční charakteristiky FIR filtrů pro různá okna zobrazuje Graf 7.1 (charakteristiky jsou FIR filtru pro akcelerometry).
71 Hammingovo okno Pravouhle okno Trojuhelnikove okno -20 F [db] f [Hz] Graf 7.1 Frekvenční charakteristiky FIR filtrů Z grafů je patrné, že pravoúhlé okno má ze všech testovaných nejstrmější přechod z propustného do nepropustného pásma. Útlum v nepropustném pásmu však není největší. Naproti tomu Hammingovo okno má v nepropustném pásmu vysoký, a s rostoucí frekvencí konstantní, útlum. Přechod z propustného do nepropustného pásma není sice tak strmý, přesto tento typ okna vychází ze všech testovaných nejlépe a je v práci použit. Získané koeficienty čitatele přenosu FIR filtru jsou uloženy do souboru. V prostředí Borland C++ Builder (v něm je naprogramována řídící aplikace) je vytvořena třída, která na vstupní data aplikuje FIR filtr a vrátí data pro filtraci. Koeficienty filtru jsou načteny ze souboru. Třída filtru pracuje iterativně, v každém kroku vzorkování jsou do ní uložena nově příchozí data a načtena z ní výstupní data Kalibrace a kompenzace V této kapitole budou rozebrány implementované postupy kalibrace použitých snímačů a kompenzace parazitních vlivů.
72 Měření offsetu gyroskopu Offset gyroskopu je údaj na výstupu snímače při působící nulové úhlové rychlosti. Princip měření spočívá v zabezpečení nulových úhlových rychlostí a následné integraci signálu z výstupu snímače po určitou dobu. Offset příslušné osy je pak získán dělením naměřeného úhlu otočení počtem vzorků. Situaci shrnuje (7.10). B g N ω g ( n) n= = 0 N B - offset příslušného gyroskopu; [ 400 / s] g ω - n-tý vzorek rychlosti měřený gyroskopem; [ 400 / s] (n) g N - počet vzorků; [ ] (7.10) Z metody Allan Variance (kapitola 2.3.2) plyne, že ideální doba integrace pro nejpřesnější změření offsetu je 300s (5min). To odpovídá při vzorkovací frekvenci 400Hz počtu vzorků N = Teplotní kompenzace gyroskopu Z měření teplotní závislosti gyroskopu (kapitola 2.3.3) plyne, že závislost je lineární se směrnicí -0,1155 /s/ C. Kompenzace musí být tedy také lineární, se stejnou směrnicí, ale opačným znaménkem (7.11). 0,1155 ω gk = ω g + ( T 25) (7.11) 400 ω - teplotně kompenzovaná úhlová rychlost; [ 400 / s] gk ω - teplotně nekompenzovaná úhlová rychlost; [ 400 / s] g T - teplota příslušné gyroskopické osy; [ C] 0, směrnice teplotní závislosti podělená vzorkovací frekvencí
73 70 Hodnota úhlové rychlosti je předpokládána správná při 25 C. Proto je nutné měření offsetu provádět při konstantní teplotě 25 C nebo se zapnutou teplotní kompenzací. Dělení konstantou 400 je dělení vzorkovací frekvencí, tedy převod citlivosti [ ] na jednotky 400 / s. Funkčnost teplotní kompenzace gyroskopu je zobrazena na Graf Vystup gyr. bez teplotni komp. Vystup gyr. s teplotni komp. Reg. primka bez kompenzace (smernice ) Reg. primka s kompenzaci (smernice 0) 1.2 ω [ /s] T [ C] Graf 7.2 Teplotní kompenzace gyroskopu Teplotní kompenzace akcelerometru Z měření závislosti akcelerometru na teplotě (kapitola 3.3.2) plyne, že závislost je lineární se směrnicí 2,1 mg/ C. Kompenzace proto musí být také lineární, se stejnou směrnicí, ale opačným znaménkem (7.12). a k = a 0,0021 ( T 25) (7.12)
74 71 1 a k - teplotně kompenzované zrychlení; [ m s ] 1 a - teplotně nekompenzované zrychlení; [ m s ] T - teplota příslušné osy; [ C] 0,0021 směrnice teplotní závislosti Opět správná hodnota zrychlení je předpokládána při 25 C. Funkčnost teplotní kompenzace akcelerometru je zobrazena na Graf Vystup akc. bez teplotni komp. Vystup akc. s teplotni komp. Reg. primka bez kompenzace (smernice ) Reg. primka s kompenzaci (smernice 0) a [g] T [ C] Graf 7.3 Teplotní kompenzace akcelerometru SET/RESET kalibrace magnetometru [10] [11] Kalibrace SET/RESET je technika, jak zjistit hodnotu výstupu magnetometru při nulovém působícím poli, což je vlastně střední hodnota výstupu mezi kladným a záporným maximem.
75 72 Při spuštění této rutiny se nejprve vyšle RESET puls do magnetometru. Tím se magnetometr přemagnetuje na opačný směr tak, že kladné maximum každé osy bude nyní záporné maximum a naopak. Aplikace si uloží data naměřená na magnetometru a poté vyšle SET puls. Ten namagnetuje magnetometr do původního stavu. Střední hodnota mezi daty jednotlivých os, naměřenými při RESET a SET pulsu je rovna offsetu SET/RESET kalibrace (7.13). M set + M O = reset (7.13) 2 O - offset kalibrace SET/RESET příslušné osy; [ ] M set - výstup magnetometru příslušné osy po SET pulsu; [ ] M reset - výstup magnetometru příslušné osy po RESET pulsu; [ ] Měření Hard Iron kalibračních údajů magnetometru [16] Kalibrační údaje, získané touto metodou, odstraňují vliv magnetických materiálů (kapitola 4.3.2). Princip spočívá v pomalé rotaci modulu kolem Z-ové osy v celém rozsahu 360. Při tom je zjištěna maximální a minimální hodnota výstupu magnetometru X- ové a Y-ové osy. Kalibrační údaje jsou pak vypočteny podle vzorců (7.14). X Y Y sf X sf off off = = X X Y Y X = Y = sf Y sf max max max max max Y X X Y max X Y 2 min 2 min min min min min nebo 1 nebo 1 + Y + X min min Y sf X co je vetsi co je vetsi sf - úprava citlivosti příslušné osy magnetometru; [ ] X, X, - offsety příslušných os magnetometru; [ ] off Y off (7.14)
76 73 X max,y max - maximální hodnoty naměřené na příslušných osách; [ X,Y min min - minimální hodnoty naměřené na příslušných osách; [ ] ] Aplikaci vypočtených kompenzačních koeficientů ukazují rovnice (7.15). S S xk yk = S = S x y X Y sf sf X Y off off (7.15) S xk, S yk - kompenzované hodnoty příslušných os; [ ] S x, S y - nekompenzované hodnoty příslušných os; [ ] Kompenzace náklonu magnetometru [17] Při vychýlení magnetometru z vodorovné polohy se změní průmět vektoru magnetického pole do roviny XY a tím se chybně změní i vypočítaný azimut. Je-li však znám úhel vychýlení, je možné matematicky dopočítat průmět vektoru magnetického pole v nevychýleném stavu a poté i správnou hodnotu azimutu. Vychýlení z vodorovné polohy je možné v ose X a Y. Pak kompenzace spočívá v převedení pootočených naměřených složek magnetického pole zpět do vodorovné roviny. K tomuto účelu dobře poslouží rotační matice. R 01X slouží pro transformaci při otočení kolem osy X a R 01Y pro otočení kolem osy Y. Rotaci kolem obou os současně řeší maticový součin R 01X a R 01Y. Výsledný přepočet je pak podle rovnice (7.16). S S S S x0 y0 z0 R 01X cos β = sin α sin β cos α sin β x0, S y0, S z0 x1, S y1, S z1 R 0 01Y cos α sin α sin β S sin α cos β S cos α cos β S - složky mag. pole přepočteny do vodorovné polohy; x1 y1 z1 (7.16) S - složky naměřené, otočené o úhel α kolem osy X a β kolem osy Y; [ ] [ ]
77 74 Navržený kompenzační algoritmus byl implementována a proměřen. Výsledky zobrazují Graf 7.4 a Graf 7.5. X-ová osa grafu představuje náklon magnetometru a osa y-ová rozdíl mezi skutečným a naměřeným azimutem. Na rozsahu náklonů od 45 do 45 se chyba azimutu pohybovala v rozmezí od 2,7 do 2,7. To je, oproti chybám bez kompenzace, značné zlepšení. Nejmenší chyba byla samozřejmě v nulovém náklonu a s rostoucím náklonem na obě strany se chyba zvětšovala. Teoreticky by však kompenzace měla chybu náklonu eliminovat dokonale. To že se tak neděje je způsobeno nepřesností v měření náklonu a také nedokonale eliminovanými vlivy vnějších polí a kovových předmětů δ [ ] β [ ] Graf Kompenzace náklonu podél osy X
78 δ [ ] β [ ] Graf 7.5 Kompenzace náklonu podél osy Y Kompenzace integrální chyby gyroskopů [18] Integrální chybu gyroskopů lze kompenzovat výhradně dalším snímačem otočení, který měří úhel absolutně. To znamená vzhledem k nějaké vnější referenci (gravitační zrychlení Země, magnetické pole Země). Z uvedeného je patrné, že pro kompenzaci integrální chyby gyroskopů v osách X a Y se nejlépe hodí akcelerometry měřící úhly ve stejných osách. Pro gyroskop v ose Z je zase nejvhodnější kompenzace pomocí magnetometru. Princip kompenzace je následující: Rozdíl mezi úhlem z gyroskopu a úhlem např. z akcelerometru je vynásoben konstantou k a odečten od úhlu gyroskopu. Blokové schéma kompenzačního postupu je na Obr. 7.3.
79 76 Obr. 7.3 Princip kompenzace integrální chyby gyroskopů Θ Θ Θ Kompenzační vzorce pro každou gyroskopickou osu popsují rovnice (7.17). xk yk zk xk = Θ = Θ = Θ x y z yk ( Θ α ) ( Θ x y x k ) α k ( Θ α ) k zk z z y Θ, Θ, Θ - kompenzované úhly natočení gyroskopů osy X, Y a Z; [ x, - nekompenzované úhly natočení gyroskopů osy X, Y a Z; [ ] Θ Θ, Θ y z α x, α y - úhly natočení akcelerometrů osy X a Y; [ ] α z - úhel otočení magnetometru (osa Z); [ ] k - konstanta důvěry v data od gyroskopů; [ ] (7.17) ] Vhodné nastavení konstanty k je stěžejní pro správné fungování této metody. Hodnota konstanty k nastavuje časovou konstantu, se kterou bude úhel gyroskopu stabilizován absolutním snímačem natočení. Konstantu k lze vypočíst jako podíl zvolené časové konstanty a vzorkovací frekvence gyroskopů (400Hz). Po řadě pokusů byla zvolena konstanta k = 0,
80 77 8. ZÁVĚR Pro měření úhlu natočení byla použita součástka ADIS16350 firmy Analog Devices integrující tříosý akcelerometr a gyroskop. Dále součástka HMC1043 firmy Honeywell obsahující tříosý magnetometr. Pro všechny snímače byly proměřeny charakteristiky základních parazitních vlivů. V případě gyroskopu byla zásadním problémem integrální chyba. Výstup gyroskopu je třeba pro zjištění úhlu natočení integrovat, což vnáší se vzrůstajícím časem stále větší chybu. Přesto byl gyroskop pro svou dobrou přesnost a nezávislost na vnějších vlivech (např. zrychlení) zvolen jako primární snímač natočení. Jeho integrální chyba je kompenzována absolutními snímači natočení. Ve dvou osách náklonu (rovnoběžné se zemským povrchem) je pro kompenzaci použit akcelerometr ve funkci inklinometru (měření gravitačního zrychlení Země a přepočet na náklon), v ose kolmé na zemský povrch je kompenzačním prostředkem magnetometr ve funkci elektronického kompasu. Na akcelerometr ve funkci inklinometru rušivě působí zejména zrychlení jiné než gravitační. Částečné eliminace je dosaženo filtrem typu dolní propust, která zabrání vlivu rychlých pohybů se zařízením. Magnetometr ve funkci elektronického kompasu je citlivý na magnetické materiály v okolí. Potlačení jejich vlivu realizuje implementovaná SET/RESET a Hard Iron kompenzace. Dalším rušivým vlivem je náklon magnetometru. Ten způsobuje chybu i několik desítek stupňů. Kompenzace spočívá ve znalosti natočení magnetometru (akcelerometr, gyroskop) a matematické korekci dat. Součástka ADIS16350 obsahuje také snímače teploty, proto byla navržena i teplotní kompenzace akcelerometru a gyroskopu. Výsledný modul obsahuje zmíněné snímače společně s mikroprocesorem ATMEGA8, který kompletuje soubor dat ze snímačů a poskytuje je nadřazenému PC. Na něm je vytvořena aplikace realizující všechny přepočty, kompenzace a vizualizace naměřených dat. Původně se předpokládalo, že modul bude veškeré kompenzační postupy provádět sám. V průběhu se však ukázalo, že používaný mikroprocesor pro to nemá
81 78 potřebný výpočetní výkon. Z časových důvodů se nepodařilo přejít na výkonnější procesor, do budoucna se však plánuje využití mikroprocesoru firmy Freescale a implementace celého algoritmu v něm. Celková přesnost měření modulu za ustálených teplotních podmínek se pohybuje kolem 2. Z časových důvodů nebyla závislost na teplotě změřena tak přesně, jak by bylo třeba. Proto i přes implementovanou teplotní kompenzaci je dopad změny teploty na měření gyroskopy značný (z důvodu integrace).
82 79 9. LITERATURA [1] VOJÁČEK, Antonín. Gyroskopy v integrovaném provedení MEMS. HW server [on-line]. [cit ]. Dostupné na: < [2] Datasheet ADIS16350, Rev. A. Analog Devices [on-line]. Dostupné na: < 55.pdf> [3] STOCKWELL, Walter. Bias Stability Mesauement: Allan Variance. Crossbow [on-line]. Dostupné na: < surement.pdf> [4] STOCKWELL, Walter. Angle Random Walk. Crossbow [on-line]. Dostupné na: < AppNote.pdf> [5] Atan2. Server Wikipedia [on-line]. Dostupné na: < en.wikipedia.org/wiki/atan2> [6] RICHEY, Rodger. Measure Tilt Using PIC16F84A & ADXL202. Microchip Technology Inc. [on-line]. Dostupné na: < [7] STORK, Thomas. Electronic Compass Design using KMZ51 nad KMZ52. Philips Semiconductors [on-line]. Dostupné na: < OMPASS.pdf> [8] Datasheet HMC1043, Rev. C. Honeywell [on-line]. Dostupné na: < [9] Set/Reset Function for Magnetic Sensors. Honeywell [on-line]. Dostupné na: <
83 80 [10] Handling Sensor Bridge Offset. Honeywell [on-line]. Dostupné na: < [11] CARUSO, Michael J. Applications of Magnetic Sensors for Low Cost Compass Systems. Honeywell [on-line]. Dostupné na: < [12] Datasheet AD7706 Rev. C. Analog Devices [on-line]. Dostupné na: < df> [13] Datasheet LT1004CS8-2. Server AllDatasheet [on-line]. Dostupné na: < [14] Datasheet ATmega8. Atmel [on-line]. Dostupné na: < [15] ŠOLC, František, ŽALUD, Luděk. Robotika. Elektronické skriptum FEKT VUT. Brno [16] CARUSO, Michael J. Applications of Magnetoresistive Sensors in Navigation Systems. Honeywell [on-line]. Dostupné na: < [17] JAN, Jiří. Číslicová filtrace, analýza a restaurace signálů. VUTIUM. Brno [18] Mesaurement of a Vehicle s Dynamic Motion. Crossbow [on-line]. Dostupné na: <
84 SEZNAM PŘÍLOH Příloha 1 Příloha 2 Příloha 3 Schéma zapojení modulu Výrobní plány desky plošných spojů modulu Osazovací plány desky plošných spojů modulu
85 Příloha 1


86 Příloha 2 Bottom (50x80mm) Top (50x80mm)

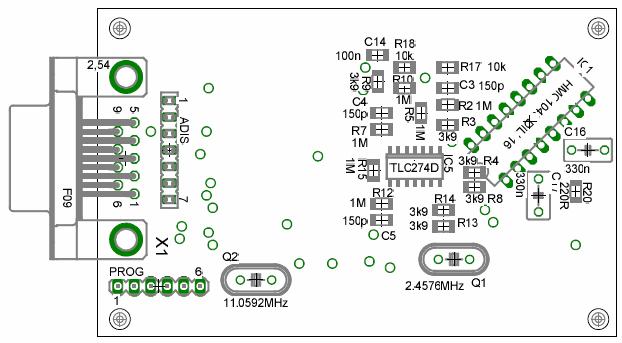
87 Příloha 3 Bottom Top
1. ÚVOD 2. MAGNETOMETRY 2.1. PRINCIP MAGNETOMETRŮ 2009/26 18. 5. 2009
 ZÁKLADNÍ PRVK KONSTRUKCE ELEKTRONICKÉO KOMPASU Ing. David Skula Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií VUT v Brně Kolejní 2960/4, 612 00 Brno Email: xskula00@stud.feec.vutbr.cz
ZÁKLADNÍ PRVK KONSTRUKCE ELEKTRONICKÉO KOMPASU Ing. David Skula Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií VUT v Brně Kolejní 2960/4, 612 00 Brno Email: xskula00@stud.feec.vutbr.cz
Zapojení odporových tenzometrů
 Zapojení odporových tenzometrů Zadání 1) Seznamte se s konstrukcí a použitím lineárních fóliových tenzometrů. 2) Proveďte měření na fóliových tenzometrech zapojených do můstku. 3) Zjistěte rovnici regresní
Zapojení odporových tenzometrů Zadání 1) Seznamte se s konstrukcí a použitím lineárních fóliových tenzometrů. 2) Proveďte měření na fóliových tenzometrech zapojených do můstku. 3) Zjistěte rovnici regresní
Měřicí řetězec. měřicí zesilovač. převod na napětí a přizpůsobení rozsahu převodníku
 Měřicí řetězec fyzikální veličina snímač měřicí zesilovač A/D převodník počítač převod fyz. veličiny na elektrickou (odpor, proud, napětí, kmitočet...) převod na napětí a přizpůsobení rozsahu převodníku
Měřicí řetězec fyzikální veličina snímač měřicí zesilovač A/D převodník počítač převod fyz. veličiny na elektrickou (odpor, proud, napětí, kmitočet...) převod na napětí a přizpůsobení rozsahu převodníku
Zesilovače. Ing. M. Bešta
 ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
Automatizační technika Měření č. 6- Analogové snímače
 Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Manuální, technická a elektrozručnost
 Manuální, technická a elektrozručnost Realizace praktických úloh zaměřených na dovednosti v oblastech: Vybavení elektrolaboratoře Schématické značky, základy pájení Fyzikální principy činnosti základních
Manuální, technická a elektrozručnost Realizace praktických úloh zaměřených na dovednosti v oblastech: Vybavení elektrolaboratoře Schématické značky, základy pájení Fyzikální principy činnosti základních
Operační zesilovač, jeho vlastnosti a využití:
 Truhlář Michal 6.. 5 Laboratorní práce č.4 Úloha č. VII Operační zesilovač, jeho vlastnosti a využití: Úkol: Zapojte operační zesilovač a nastavte jeho zesílení na hodnotu přibližně. Potvrďte platnost
Truhlář Michal 6.. 5 Laboratorní práce č.4 Úloha č. VII Operační zesilovač, jeho vlastnosti a využití: Úkol: Zapojte operační zesilovač a nastavte jeho zesílení na hodnotu přibližně. Potvrďte platnost
Projekt BROB B13. Jízda po čáře pro reklamní robot. Vedoucí projektu: Ing. Tomáš Florián
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCHTECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Projekt BROB 2013 B13. Jízda po čáře pro reklamní robot Vedoucí projektu: Ing. Tomáš Florián Autoři práce: Martin
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCHTECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Projekt BROB 2013 B13. Jízda po čáře pro reklamní robot Vedoucí projektu: Ing. Tomáš Florián Autoři práce: Martin
Operační zesilovač (dále OZ)
") http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
e, přičemž R Pro termistor, který máte k dispozici, platí rovnice
 Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
Obrázek č. 1 : Operační zesilovač v zapojení jako neinvertující zesilovač
 Teoretický úvod Oscilátor s Wienovým článkem je poměrně jednoduchý obvod, typické zapojení oscilátoru s aktivním a pasivním prvkem. V našem případě je pasivním prvkem Wienův článek (dále jen WČ) a aktivním
Teoretický úvod Oscilátor s Wienovým článkem je poměrně jednoduchý obvod, typické zapojení oscilátoru s aktivním a pasivním prvkem. V našem případě je pasivním prvkem Wienův článek (dále jen WČ) a aktivním
Šum AD24USB a možnosti střídavé modulace
 Šum AD24USB a možnosti střídavé modulace Vstup USB měřicího modulu AD24USB je tvořen diferenciálním nízkošumovým zesilovačem s bipolárními operačními zesilovači. Charakteristickou vlastností těchto zesilovačů
Šum AD24USB a možnosti střídavé modulace Vstup USB měřicího modulu AD24USB je tvořen diferenciálním nízkošumovým zesilovačem s bipolárními operačními zesilovači. Charakteristickou vlastností těchto zesilovačů
Inteligentní koberec ( )
") Inteligentní koberec (10.4.2007) Řešení projektu bylo rozděleno do dvou fází. V první fázi byly hledány vhodné principy konstrukce senzorového pole. Druhá fáze se zaměřuje na praktické ověření vlastností
Inteligentní koberec (10.4.2007) Řešení projektu bylo rozděleno do dvou fází. V první fázi byly hledány vhodné principy konstrukce senzorového pole. Druhá fáze se zaměřuje na praktické ověření vlastností
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Chyby a neurčitosti měření
 Radioelektronická měření (MREM) Chyby a neurčitosti měření 10. přednáška Jiří Dřínovský Ústav radioelektroniky FEKT VUT v Brně Základní pojmy Měření je souhrn činností s cílem určit hodnotu měřené veličiny
Radioelektronická měření (MREM) Chyby a neurčitosti měření 10. přednáška Jiří Dřínovský Ústav radioelektroniky FEKT VUT v Brně Základní pojmy Měření je souhrn činností s cílem určit hodnotu měřené veličiny
TENZOMETRICKÉ PŘEVODNÍKY
 TENZOMETRICKÉ PŘEVODNÍKY řady TZP s aktivním frekvenčním filtrem www.aterm.cz 1 Obsah 1. Úvod 3 2. Obecný popis tenzometrického převodníku 3 3. Technický popis tenzometrického převodníku 4 4. Nastavení
TENZOMETRICKÉ PŘEVODNÍKY řady TZP s aktivním frekvenčním filtrem www.aterm.cz 1 Obsah 1. Úvod 3 2. Obecný popis tenzometrického převodníku 3 3. Technický popis tenzometrického převodníku 4 4. Nastavení
1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda derivační obvod se zadanou časovou konstantu: τ 2 = 320µs
 1 Zadání 1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda integrační obvod se zadanou časovou konstantu: τ 1 = 62µs derivační obvod se zadanou časovou konstantu: τ 2 = 320µs Možnosti
1 Zadání 1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda integrační obvod se zadanou časovou konstantu: τ 1 = 62µs derivační obvod se zadanou časovou konstantu: τ 2 = 320µs Možnosti
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr
 Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Elektřina a magnetismus úlohy na porozumění
 Elektřina a magnetismus úlohy na porozumění 1) Prázdná nenabitá plechovka je umístěna na izolační podložce. V jednu chvíli je do místa A na vnějším povrchu plechovky přivedeno malé množství náboje. Budeme-li
Elektřina a magnetismus úlohy na porozumění 1) Prázdná nenabitá plechovka je umístěna na izolační podložce. V jednu chvíli je do místa A na vnějším povrchu plechovky přivedeno malé množství náboje. Budeme-li
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY. MRBT Robotika
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘÍCÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘÍCÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
3. D/A a A/D převodníky
 3. D/A a A/D převodníky 3.1 D/A převodníky Digitálně/analogové (D/A) převodníky slouží k převodu číslicově vyjádřené hodnoty (např. v úrovních TTL) ve dvojkové soustavě na hodnotu nějaké analogové veličiny.
3. D/A a A/D převodníky 3.1 D/A převodníky Digitálně/analogové (D/A) převodníky slouží k převodu číslicově vyjádřené hodnoty (např. v úrovních TTL) ve dvojkové soustavě na hodnotu nějaké analogové veličiny.
9. MĚŘENÍ SÍLY TENZOMETRICKÝM MŮSTKEM
 9. MĚŘENÍ SÍLY TENZOMETICKÝM MŮSTKEM Úvod: Tenzometry se používají např. pro: Měření deformací objektů. Měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů. Měření zatížení
9. MĚŘENÍ SÍLY TENZOMETICKÝM MŮSTKEM Úvod: Tenzometry se používají např. pro: Měření deformací objektů. Měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů. Měření zatížení
Zpětná vazba a linearita zesílení
 Zpětná vazba Zpětná vazba přivádí část výstupního signálu zpět na vstup. Kladná zp. vazba způsobuje nestabilitu, používá se vyjímečně. Záporná zp. vazba (zmenšení vstupního signálu o část výstupního) omezuje
Zpětná vazba Zpětná vazba přivádí část výstupního signálu zpět na vstup. Kladná zp. vazba způsobuje nestabilitu, používá se vyjímečně. Záporná zp. vazba (zmenšení vstupního signálu o část výstupního) omezuje
Mikropočítačová vstupně/výstupní jednotka pro řízení tepelných modelů. Zdeněk Oborný
 Mikropočítačová vstupně/výstupní jednotka pro řízení tepelných modelů Zdeněk Oborný Freescale 2013 1. Obecné vlastnosti Cílem bylo vytvořit zařízení, které by sloužilo jako modernizovaná náhrada stávající
Mikropočítačová vstupně/výstupní jednotka pro řízení tepelných modelů Zdeněk Oborný Freescale 2013 1. Obecné vlastnosti Cílem bylo vytvořit zařízení, které by sloužilo jako modernizovaná náhrada stávající
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr
 11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
INTEGROVANÁ STŘEDNÍ ŠKOLA TECHNICKÁ BENEŠOV. Černoleská 1997, Benešov. Elektrická měření. Tematický okruh. Měření elektrických veličin.
 Číslo projektu CZ.107/1.5.00/34.0425 Název školy INTEGROVANÁ STŘEDNÍ ŠKOLA TECHNICKÁ BENEŠOV Černoleská 1997, 256 01 Benešov Předmět Elektrická měření Tematický okruh Měření elektrických veličin Téma Měření
Číslo projektu CZ.107/1.5.00/34.0425 Název školy INTEGROVANÁ STŘEDNÍ ŠKOLA TECHNICKÁ BENEŠOV Černoleská 1997, 256 01 Benešov Předmět Elektrická měření Tematický okruh Měření elektrických veličin Téma Měření
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í. výstup
 ELEKTONIKA I N V E S T I C E D O O Z V O J E V Z D Ě L Á V Á N Í 1. Usměrňování a vyhlazování střídavého a. jednocestné usměrnění Do obvodu střídavého proudu sériově připojíme diodu. Prochází jí proud
ELEKTONIKA I N V E S T I C E D O O Z V O J E V Z D Ě L Á V Á N Í 1. Usměrňování a vyhlazování střídavého a. jednocestné usměrnění Do obvodu střídavého proudu sériově připojíme diodu. Prochází jí proud
Návrh a analýza jednostupňového zesilovače
 Návrh a analýza jednostupňového zesilovače Zadání: U CC = 35 V I C = 10 ma R Z = 2 kω U IG = 2 mv R IG = 220 Ω Tolerance u napětí a proudů, kromě Id je ± 1 % ze zadaných hodnot. Frekvence oscilátoru u
Návrh a analýza jednostupňového zesilovače Zadání: U CC = 35 V I C = 10 ma R Z = 2 kω U IG = 2 mv R IG = 220 Ω Tolerance u napětí a proudů, kromě Id je ± 1 % ze zadaných hodnot. Frekvence oscilátoru u
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TECHNICKÁ DOKUMENTACE
 Střední škola, Havířov-Šumbark, Sýkorova 1/613, příspěvková organizace TECHNICKÁ DOKUMENTACE Rozmístění a instalace prvků a zařízení Ing. Pavel Chmiel, Ph.D. OBSAH VÝUKOVÉHO MODULU 1. Součástky v elektrotechnice
Střední škola, Havířov-Šumbark, Sýkorova 1/613, příspěvková organizace TECHNICKÁ DOKUMENTACE Rozmístění a instalace prvků a zařízení Ing. Pavel Chmiel, Ph.D. OBSAH VÝUKOVÉHO MODULU 1. Součástky v elektrotechnice
Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka
![Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka](/thumbs/91/107653662.jpg "Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka") Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry
 18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
Převodní charakteristiku sensoru popisuje následující vzorec: C(RH)=C 76 * [1 + HK * (RH 76) + K] (1.1)
![Převodní charakteristiku sensoru popisuje následující vzorec: C(RH)=C 76 * [1 + HK * (RH 76) + K] (1.1)](/thumbs/27/10091673.jpg "Převodní charakteristiku sensoru popisuje následující vzorec: C(RH)=C 76 * [1 + HK * (RH 76) + K] (1.1)") REALISTICKÉ MĚŘENÍ RELATIVNÍ VLHKOSTI PLYNŮ 1.1 Úvod Kapacitní polymerní sensory relativní vlhkosti jsou principielně teplotně závislé. Kapacita sensoru se mění nejen při změně relativní vlhkosti plynného
REALISTICKÉ MĚŘENÍ RELATIVNÍ VLHKOSTI PLYNŮ 1.1 Úvod Kapacitní polymerní sensory relativní vlhkosti jsou principielně teplotně závislé. Kapacita sensoru se mění nejen při změně relativní vlhkosti plynného
Návrh konstrukce odchovny 2. dil
 1 Portál pre odborné publikovanie ISSN 1338-0087 Návrh konstrukce odchovny 2. dil Pikner Michal Elektrotechnika 19.01.2011 V minulem dile jsme si popsali návrh konstrukce odchovny. senzamili jsme se s
1 Portál pre odborné publikovanie ISSN 1338-0087 Návrh konstrukce odchovny 2. dil Pikner Michal Elektrotechnika 19.01.2011 V minulem dile jsme si popsali návrh konstrukce odchovny. senzamili jsme se s
Účinky elektrického proudu. vzorová úloha (SŠ)
") Účinky elektrického proudu vzorová úloha (SŠ) Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud jako
Účinky elektrického proudu vzorová úloha (SŠ) Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud jako
13 Měření na sériovém rezonančním obvodu
 13 13.1 Zadání 1) Změřte hodnotu indukčnosti cívky a kapacity kondenzátoru RC můstkem, z naměřených hodnot vypočítej rezonanční kmitočet. 2) Generátorem nastavujte frekvenci v rozsahu od 0,1 * f REZ do
13 13.1 Zadání 1) Změřte hodnotu indukčnosti cívky a kapacity kondenzátoru RC můstkem, z naměřených hodnot vypočítej rezonanční kmitočet. 2) Generátorem nastavujte frekvenci v rozsahu od 0,1 * f REZ do
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
Popis obvodu U2403B. Funkce integrovaného obvodu U2403B
 ASICentrum s.r.o. Novodvorská 994, 142 21 Praha 4 Tel. (02) 4404 3478, Fax: (02) 472 2164, E-mail: info@asicentrum.cz ========== ========= ======== ======= ====== ===== ==== === == = Popis obvodu U2403B
ASICentrum s.r.o. Novodvorská 994, 142 21 Praha 4 Tel. (02) 4404 3478, Fax: (02) 472 2164, E-mail: info@asicentrum.cz ========== ========= ======== ======= ====== ===== ==== === == = Popis obvodu U2403B
Bezdrátový přenos signálu v reálné aplikaci na letadle.
 Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
PŘEDNÁŠKA 1 - OBSAH. Přednáška 1 - Obsah
 PŘEDNÁŠKA 1 - OBSAH Přednáška 1 - Obsah i 1 Analogová integrovaná technika (AIT) 1 1.1 Základní tranzistorová rovnice... 1 1.1.1 Transkonduktance... 2 1.1.2 Výstupní dynamická impedance tranzistoru...
PŘEDNÁŠKA 1 - OBSAH Přednáška 1 - Obsah i 1 Analogová integrovaná technika (AIT) 1 1.1 Základní tranzistorová rovnice... 1 1.1.1 Transkonduktance... 2 1.1.2 Výstupní dynamická impedance tranzistoru...
OPERA Č NÍ ZESILOVA Č E
 OPERAČNÍ ZESILOVAČE OPERAČNÍ ZESILOVAČE Z NÁZVU SE DÁ USOUDIT, ŽE SE JEDNÁ O ZESILOVAČ POUŽÍVANÝ K NĚJAKÝM OPERACÍM. PŮVODNÍ URČENÍ SE TÝKALO ANALOGOVÝCH POČÍTAČŮ, KDE OPERAČNÍ ZESILOVAČ DOKÁZAL USKUTEČNIT
OPERAČNÍ ZESILOVAČE OPERAČNÍ ZESILOVAČE Z NÁZVU SE DÁ USOUDIT, ŽE SE JEDNÁ O ZESILOVAČ POUŽÍVANÝ K NĚJAKÝM OPERACÍM. PŮVODNÍ URČENÍ SE TÝKALO ANALOGOVÝCH POČÍTAČŮ, KDE OPERAČNÍ ZESILOVAČ DOKÁZAL USKUTEČNIT
Určeno pro posluchače bakalářských studijních programů FS
 rčeno pro posluchače bakalářských studijních programů FS 3. STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad 3.: V obvodě sestávajícím ze sériové kombinace rezistoru, reálné cívky a kondenzátoru vypočítejte požadované
rčeno pro posluchače bakalářských studijních programů FS 3. STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad 3.: V obvodě sestávajícím ze sériové kombinace rezistoru, reálné cívky a kondenzátoru vypočítejte požadované
Technická diagnostika, chyby měření
 Technická diagnostika, chyby měření Obsah přednášky Technická diagnostika Měřicí řetězec Typy chyb měření Příklad diagnostiky: termovize ložisko 95 C měření 2/21 Co to je? Technická diagnostika Obdoba
Technická diagnostika, chyby měření Obsah přednášky Technická diagnostika Měřicí řetězec Typy chyb měření Příklad diagnostiky: termovize ložisko 95 C měření 2/21 Co to je? Technická diagnostika Obdoba
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
LC oscilátory s transformátorovou vazbou
 1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
Základy elektrotechniky 2 (21ZEL2) Přednáška 1
 Přednáška 1") Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
ÚVOD. Výhoda spínaného stabilizátoru oproti lineárnímu
 ÚVOD Podsvícení budíků pomocí LED je velmi praktické zapojení. Pokud je použita varianta s paralelním zapojením všech LE diod je třeba napájet celý obvod zdrojem konstantního napětí. Jas lze regulovat
ÚVOD Podsvícení budíků pomocí LED je velmi praktické zapojení. Pokud je použita varianta s paralelním zapojením všech LE diod je třeba napájet celý obvod zdrojem konstantního napětí. Jas lze regulovat
Binární data. Číslicový systém. Binární data. Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu
 5. Obvody pro číslicové zpracování signálů 1 Číslicový systém počítač v reálném prostředí Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu Binární data
5. Obvody pro číslicové zpracování signálů 1 Číslicový systém počítač v reálném prostředí Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu Binární data
2. MĚŘENÍ TEPLOTY TERMOČLÁNKY
 2. MĚŘENÍ TEPLOTY TERMOČLÁNKY Otázky k úloze (domácí příprava): Jaká je teplota kompenzačního spoje ( studeného konce ), na kterou koriguje kompenzační krabice? Dá se to zjistit jednoduchým měřením? Čemu
2. MĚŘENÍ TEPLOTY TERMOČLÁNKY Otázky k úloze (domácí příprava): Jaká je teplota kompenzačního spoje ( studeného konce ), na kterou koriguje kompenzační krabice? Dá se to zjistit jednoduchým měřením? Čemu
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Rychlost, zrychlení, tíhové zrychlení
 Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Systém vykonávající tlumené kmity lze popsat obyčejnou lineární diferenciální rovnice 2. řadu s nulovou pravou stranou:
 Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Zvyšující DC-DC měnič
 - 1 - Zvyšující DC-DC měnič (c) Ing. Ladislav Kopecký, 2007 Na obr. 1 je nakresleno principielní schéma zapojení zvyšujícího měniče, kterému se také říká boost nebo step-up converter. Princip je založen,
- 1 - Zvyšující DC-DC měnič (c) Ing. Ladislav Kopecký, 2007 Na obr. 1 je nakresleno principielní schéma zapojení zvyšujícího měniče, kterému se také říká boost nebo step-up converter. Princip je založen,
Pracovní list žáka (ZŠ)
") Pracovní list žáka (ZŠ) Účinky elektrického proudu Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud
Pracovní list žáka (ZŠ) Účinky elektrického proudu Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud
Studium tranzistorového zesilovače
 Studium tranzistorového zesilovače Úkol : 1. Sestavte tranzistorový zesilovač. 2. Sestavte frekvenční amplitudovou charakteristiku. 3. Porovnejte naměřená zesílení s hodnotou vypočtenou. Pomůcky : - Generátor
Studium tranzistorového zesilovače Úkol : 1. Sestavte tranzistorový zesilovač. 2. Sestavte frekvenční amplitudovou charakteristiku. 3. Porovnejte naměřená zesílení s hodnotou vypočtenou. Pomůcky : - Generátor
5. A/Č převodník s postupnou aproximací
 5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
Operační zesilovač. Úloha A2: Úkoly: Nutné vstupní znalosti: Diagnostika a testování elektronických systémů
 Diagnostika a testování elektronických systémů Úloha A2: 1 Operační zesilovač Jméno: Datum: Obsah úlohy: Diagnostika chyb v dvoustupňovém operačním zesilovači Úkoly: 1) Nalezněte poruchy v operačním zesilovači
Diagnostika a testování elektronických systémů Úloha A2: 1 Operační zesilovač Jméno: Datum: Obsah úlohy: Diagnostika chyb v dvoustupňovém operačním zesilovači Úkoly: 1) Nalezněte poruchy v operačním zesilovači
A/D a D/A PŘEVODNÍK 0(4) až 24 ma DC, 16 bitů
 až 24 ma DC, 16 bitů") Deska obsahuje osm samostatných galvanicky oddělených vstupních A/D převod-níků pro měření stejnosměrných proudových signálů 0(4) 20 ma z technologických převodníků a snímačů a čtyři samostatné galvanicky
Deska obsahuje osm samostatných galvanicky oddělených vstupních A/D převod-níků pro měření stejnosměrných proudových signálů 0(4) 20 ma z technologických převodníků a snímačů a čtyři samostatné galvanicky
7. Určete frekvenční charakteristiku zasilovače v zapojení jako dolní propust. U 0 = R 2 U 1 (1)
") Úkoly 7 Operační zesilovač. Ověřte platnost vztahu pro výstupní napětí zesilovače při zapojení s invertujícím vstupem.. Určete frekvenční charakteristiku zesilovače při zapojení s neinvertujícím vstupem.
Úkoly 7 Operační zesilovač. Ověřte platnost vztahu pro výstupní napětí zesilovače při zapojení s invertujícím vstupem.. Určete frekvenční charakteristiku zesilovače při zapojení s neinvertujícím vstupem.
Modul GPS přijímače ublox LEA6-T
 Modul GPS přijímače ublox LEA6-T Vlastnosti přijímače LEA6-T GPS přijímač LEA6-T do firmy ublox je určený primárně na aplikace s přesným časem. Tomu jsou také přizpůsobeny jeho vstupy a výstupy. Celý přijímač
Modul GPS přijímače ublox LEA6-T Vlastnosti přijímače LEA6-T GPS přijímač LEA6-T do firmy ublox je určený primárně na aplikace s přesným časem. Tomu jsou také přizpůsobeny jeho vstupy a výstupy. Celý přijímač
Číslicový Voltmetr s ICL7107
 České vysoké učení technické v Praze Fakulta elektrotechnická Analogové předzpracování signálu a jeho digitalizace Číslicový Voltmetr s ICL7107 Ondřej Tomíška Petr Česák Petr Ornst 2002/2003 ZADÁNÍ: 1)
České vysoké učení technické v Praze Fakulta elektrotechnická Analogové předzpracování signálu a jeho digitalizace Číslicový Voltmetr s ICL7107 Ondřej Tomíška Petr Česák Petr Ornst 2002/2003 ZADÁNÍ: 1)
Návrh frekvenčního filtru
 Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
FEM SIMULACE PŘEVODNÍ CHARAKTERISTIKY KAPACITNÍHO SENZORU POLOHY
 FEM SIMULACE PŘEVODNÍ CHARAKTERISTIKY KAPACITNÍHO SENZORU POLOHY O. Holub 1, Z. Hurák 2 1 Katedra řídicí techniky, České vysoké učení technické v Praze, Česká republika, holubo2@control.felk.cvut.cz 2
FEM SIMULACE PŘEVODNÍ CHARAKTERISTIKY KAPACITNÍHO SENZORU POLOHY O. Holub 1, Z. Hurák 2 1 Katedra řídicí techniky, České vysoké učení technické v Praze, Česká republika, holubo2@control.felk.cvut.cz 2
Měření tíhového zrychlení matematickým a reverzním kyvadlem
 Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Úloha č. 3 Měření tíhového zrychlení matematickým a reverzním kyvadlem Úkoly měření: 1. Určete tíhové zrychlení pomocí reverzního a matematického kyvadla. Pro stanovení tíhového zrychlení, viz bod 1, měřte
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
TENZOMETRICKÝ PŘEVODNÍK
 TENZOMETRICKÝ PŘEVODNÍK S DIGITÁLNÍM NULOVÁNÍM typ TENZ 2215 ve skříňce DIN35 www.aterm.cz 1 1. ÚVOD...3 2. OBECNÝ POPIS TENZOMETRICKÉHO PŘEVODNÍKU...4 3. TECHNICKÝ POPIS TENZOMETRICKÉHO PŘEVODNÍKU...4
TENZOMETRICKÝ PŘEVODNÍK S DIGITÁLNÍM NULOVÁNÍM typ TENZ 2215 ve skříňce DIN35 www.aterm.cz 1 1. ÚVOD...3 2. OBECNÝ POPIS TENZOMETRICKÉHO PŘEVODNÍKU...4 3. TECHNICKÝ POPIS TENZOMETRICKÉHO PŘEVODNÍKU...4
TENZOMETRICKÝ PŘEVODNÍK
 TENZOMETRICKÝ PŘEVODNÍK typ TENZ2109-5 Výrobu a servis zařízení provádí: ATERM, Nad Hřištěm 206, 765 02 Otrokovice Telefon/Fax: 577 932 759 Mobil: 603 217 899 E-mail: matulik@aterm.cz Internet: http://www.aterm.cz
TENZOMETRICKÝ PŘEVODNÍK typ TENZ2109-5 Výrobu a servis zařízení provádí: ATERM, Nad Hřištěm 206, 765 02 Otrokovice Telefon/Fax: 577 932 759 Mobil: 603 217 899 E-mail: matulik@aterm.cz Internet: http://www.aterm.cz
elektrické filtry Jiří Petržela filtry založené na jiných fyzikálních principech
 Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
Teorie úlohy: Operační zesilovač je elektronický obvod, který se využívá v měřící, výpočetní a regulační technice. Má napěťové zesílení alespoň A u
 Fyzikální praktikum č.: 7 Datum: 7.4.2005 Vypracoval: Tomáš Henych Název: Operační zesilovač, jeho vlastnosti a využití Teorie úlohy: Operační zesilovač je elektronický obvod, který se využívá v měřící,
Fyzikální praktikum č.: 7 Datum: 7.4.2005 Vypracoval: Tomáš Henych Název: Operační zesilovač, jeho vlastnosti a využití Teorie úlohy: Operační zesilovač je elektronický obvod, který se využívá v měřící,
Projekt - Voltmetr. Přednáška 3 - část A3B38MMP, 2015 J. Fischer kat. měření, ČVUT - FEL, Praha. A3B38MMP, 2015, J.Fischer, kat. měření, ČVUT - FEL 1
 Projekt - Voltmetr Přednáška 3 - část A3B38MMP, 2015 J. Fischer kat. měření, ČVUT - FEL, Praha A3B38MMP, 2015, J.Fischer, kat. měření, ČVUT - FEL 1 Náplň Projekt Voltmetr Princip převodu Obvodové řešení
Projekt - Voltmetr Přednáška 3 - část A3B38MMP, 2015 J. Fischer kat. měření, ČVUT - FEL, Praha A3B38MMP, 2015, J.Fischer, kat. měření, ČVUT - FEL 1 Náplň Projekt Voltmetr Princip převodu Obvodové řešení
ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE. Úloha 5: Měření tíhového zrychlení
 ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE Datum měření: číslo skupiny: Spolupracovali: 1 Úvod 1.1 Pracovní úkoly [1] Úloha 5: Měření tíhového zrychlení Jméno: Ročník, kruh: Klasifikace: 1. V domácí
ZÁKLADY FYZIKÁLNÍCH MĚŘENÍ FJFI ČVUT V PRAZE Datum měření: číslo skupiny: Spolupracovali: 1 Úvod 1.1 Pracovní úkoly [1] Úloha 5: Měření tíhového zrychlení Jméno: Ročník, kruh: Klasifikace: 1. V domácí
SNÍMAČE PRO MĚŘENÍ DEFORMACE
 SNÍMAČE PRO MĚŘENÍ DEFORMACE 8.1. Odporové tenzometry 8.2. Optické tenzometry 8.3. Bezkontaktní optické metody 8.1. ODOPROVÉ TENZOMETRY 8.1.1. Princip měření deformace 8.1.2. Kovové tenzometry 8.1.3. Polovodičové
SNÍMAČE PRO MĚŘENÍ DEFORMACE 8.1. Odporové tenzometry 8.2. Optické tenzometry 8.3. Bezkontaktní optické metody 8.1. ODOPROVÉ TENZOMETRY 8.1.1. Princip měření deformace 8.1.2. Kovové tenzometry 8.1.3. Polovodičové
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
(s výjimkou komparátoru v zapojení č. 5) se vyhněte saturaci výstupního napětí. Volte tedy
 se vyhněte saturaci výstupního napětí. Volte tedy") Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve všech oblastech elektroniky. Jde o diferenciální zesilovač napětí s velkým ziskem. Jinak řečeno, operační zesilovač
Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve všech oblastech elektroniky. Jde o diferenciální zesilovač napětí s velkým ziskem. Jinak řečeno, operační zesilovač
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Výhody/Použití. Varianty. prostředí. Flexibilní vícekomponentní měřící. Třída přesnosti 0,0025. Měřící zesilovač. Ovládání dotykovou obrazovkou
 Datový list Měřící zesilovač MCMpro Výhody/Použití Flexibilní vícekomponentní měřící zesilovač Třída přesnosti 0,0025 Konfigurovatelný uživatelský software Ovládání dotykovou obrazovkou Konfigurovatelné
Datový list Měřící zesilovač MCMpro Výhody/Použití Flexibilní vícekomponentní měřící zesilovač Třída přesnosti 0,0025 Konfigurovatelný uživatelský software Ovládání dotykovou obrazovkou Konfigurovatelné
Přenos signálů, výstupy snímačů
 Přenos signálů, výstupy snímačů Topologie zařízení, typy průmyslových sběrnic, výstupní signály snímačů Přenosy signálů informací Topologie Dle rozmístění ŘS Distribuované řízení Většinou velká zařízení
Přenos signálů, výstupy snímačů Topologie zařízení, typy průmyslových sběrnic, výstupní signály snímačů Přenosy signálů informací Topologie Dle rozmístění ŘS Distribuované řízení Většinou velká zařízení
7. MĚŘENÍ LINEÁRNÍHO POSUVU
 7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
Inteligentní převodníky SMART. Univerzální vícevstupový programovatelný převodník. 6xS
 Univerzální vícevstupový programovatelný převodník 6xS 6 vstupů: DC napětí, DC proud, Pt100, Pt1000, Ni100, Ni1000, termočlánek, ( po dohodě i jiné ) 6 výstupních proudových signálů 4-20mA (vzájemně galvanicky
Univerzální vícevstupový programovatelný převodník 6xS 6 vstupů: DC napětí, DC proud, Pt100, Pt1000, Ni100, Ni1000, termočlánek, ( po dohodě i jiné ) 6 výstupních proudových signálů 4-20mA (vzájemně galvanicky
8. Sběr a zpracování technologických proměnných
 8. Sběr a zpracování technologických proměnných Účel: dodat v částečně předzpracovaném a pro další použití vhodném tvaru ucelenou informaci o procesu pro následnou analyzu průběhu procesu a pro rozhodování
8. Sběr a zpracování technologických proměnných Účel: dodat v částečně předzpracovaném a pro další použití vhodném tvaru ucelenou informaci o procesu pro následnou analyzu průběhu procesu a pro rozhodování
d p o r o v t e p l o m ě r, t e r m o č l á n k
 d p o r o v t e p l o m ě r, t e r m o č l á n k Ú k o l : a) Proveďte kalibraci odporového teploměru, termočlánku a termistoru b) Určete teplotní koeficienty odporového teploměru, konstanty charakterizující
d p o r o v t e p l o m ě r, t e r m o č l á n k Ú k o l : a) Proveďte kalibraci odporového teploměru, termočlánku a termistoru b) Určete teplotní koeficienty odporového teploměru, konstanty charakterizující
Mechanika tuhého tělesa
 Mechanika tuhého tělesa Tuhé těleso je ideální těleso, jehož tvar ani objem se působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky Pohyby tuhého tělesa Posuvný
Mechanika tuhého tělesa Tuhé těleso je ideální těleso, jehož tvar ani objem se působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky Pohyby tuhého tělesa Posuvný
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Fyzikální vzdělávání. 1. ročník. Učební obor: Kuchař číšník Kadeřník. Implementace ICT do výuky č. CZ.1.07/1.1.02/ GG OP VK
 Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
14. AKCELEROMETR. Úkol měření. Postup měření
 Úkol měření 14. AKCELEROMETR 1. Seznamte se s fyzikální podstatou činnosti mikroelektromechanického akcelerometru ADXL05, programu pro ovládání a sběr dat z akcelerometrického senzoru a strukturou mikropočítačem
Úkol měření 14. AKCELEROMETR 1. Seznamte se s fyzikální podstatou činnosti mikroelektromechanického akcelerometru ADXL05, programu pro ovládání a sběr dat z akcelerometrického senzoru a strukturou mikropočítačem
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
NTIS-VP1/1: Laboratorní napájecí zdroj programovatelný
 NTIS-VP1/1: Laboratorní napájecí zdroj programovatelný stejnosměrný zdroj s regulací výstupního napětí a proudu s programovatelnými funkcemi 3 nezávislé výstupní kanály výstupní rozsah napětí u všech kanálů:
NTIS-VP1/1: Laboratorní napájecí zdroj programovatelný stejnosměrný zdroj s regulací výstupního napětí a proudu s programovatelnými funkcemi 3 nezávislé výstupní kanály výstupní rozsah napětí u všech kanálů:
Střední průmyslová škola elektrotechniky a informatiky, Ostrava VÝROBNÍ DOKUMENTACE
 Střední průmyslová škola elektrotechniky a informatiky, Ostrava Číslo dokumentace: VÝROBNÍ DOKUMENTACE Jméno a příjmení: Třída: E2B Název výrobku: Interface/osmibitová vstupní periferie pro mikropočítač
Střední průmyslová škola elektrotechniky a informatiky, Ostrava Číslo dokumentace: VÝROBNÍ DOKUMENTACE Jméno a příjmení: Třída: E2B Název výrobku: Interface/osmibitová vstupní periferie pro mikropočítač
SOUČÁSTKY ELEKTRONIKY
 SOUČÁSTKY ELEKTRONIKY Učební obor: ELEKTRO bakalářské studium Počet hodin: 90 z toho 30 hodin v 1. semestru 60 hodin ve 2. semestru Předmět je zakončen zápočtem v 1. semestru a zápočtem a zkouškou ve 2.
SOUČÁSTKY ELEKTRONIKY Učební obor: ELEKTRO bakalářské studium Počet hodin: 90 z toho 30 hodin v 1. semestru 60 hodin ve 2. semestru Předmět je zakončen zápočtem v 1. semestru a zápočtem a zkouškou ve 2.
Fyzikální praktikum 3 Operační zesilovač
 Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole
 5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
1 Tuhé těleso a jeho pohyb
 1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY. OPTICKÝ SPOJ LR-830/1550 Technický popis
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY OPTICKÝ SPOJ LR-830/1550 Technický popis BRNO, 2009 1 Návrh a konstrukce dálkového spoje 1.1 Optická
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY OPTICKÝ SPOJ LR-830/1550 Technický popis BRNO, 2009 1 Návrh a konstrukce dálkového spoje 1.1 Optická
MODUL 3 KANÁLOVÉHO D/A PŘEVODNÍKU 0 25 ma
 MODUL 3 KANÁLOVÉHO D/A VLASTNOSTI 3 galvanicky oddělené pasivní proudové výstupy izolační napětí mezi kanály 600V () 16-ti bitový D/A převod kontrola integrity proudové smyčky definovaná hodnota výstupu
MODUL 3 KANÁLOVÉHO D/A VLASTNOSTI 3 galvanicky oddělené pasivní proudové výstupy izolační napětí mezi kanály 600V () 16-ti bitový D/A převod kontrola integrity proudové smyčky definovaná hodnota výstupu
Fázorové diagramy pro ideální rezistor, skutečná cívka, ideální cívka, skutečný kondenzátor, ideální kondenzátor.
 FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických
FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických
elektrické filtry Jiří Petržela aktivní prvky v elektrických filtrech
 Jiří Petržela základní aktivní prvky používané v analogových filtrech standardní operační zesilovače (VFA) transadmitanční zesilovače (OTA, BOTA, MOTA) transimpedanční zesilovače (CFA) proudové konvejory
Jiří Petržela základní aktivní prvky používané v analogových filtrech standardní operační zesilovače (VFA) transadmitanční zesilovače (OTA, BOTA, MOTA) transimpedanční zesilovače (CFA) proudové konvejory