DIGITÁLNÍ ŘÍZENÍ NAVÍJEČKY CÍVEK
|
|
|
- Matěj Kopecký
- před 8 lety
- Počet zobrazení:
Transkript
1 Středoškolská technika 2012 Setkání a prezentace prací středoškolských studentů na ČVUT DIGITÁLNÍ ŘÍZENÍ NAVÍJEČKY CÍVEK Vilém Kárský Vyšší odborná škola a Střední průmyslová škola Šumperk Generála Krátkého 1, Šumperk

2 Děkuji ing. Vítu Krňávkovi za obětavou pomoc a podnětné připomínky, které mi během práce poskytoval. Děkuji Hynku Kárskému za pomoc s mechanickou částí práce.

3 Anotace: Elektronické řešení digitálního řízení navíječky cívek pomocí jednočipového mikropočítače Atmega8. Digital řízení umožňuje navíjení i odvíjení cívek. Při navíjení je hlídán posun vodiče, aby byly závity úhledně vinuty. Klíčová slova: Atmega8, Navíječka cívek, Navíjení cívek, Digitální řízení, Anotation: Electronic solutions of digital control coil winder by single-chip microcontroller Atmega8. Digital control allows winding the coils and unwinding the coils. Cable is monitored during widing coil, to neatly coils winding. Key words: Atmega8, Coil winder, Coil winding, digital control

4 Obsah 1. Úvod Požadavky na navíjení cívek Ruční navíjení Automatické navíjení Návrh digitálního řízení Použité součástky Atmega L293B MC1602E Krokové motory Návrh mechanické konstrukce navíječky Dokumentace Elektronická část Dekodér přerušení Buzení krokových motorů Programové řešení Průběh menu Ukázky části programu

5 Menu Ovládání krokových motorů Ověření funkcí řízení navíječky Fotografie zařízení Resumé Seznam obrázků Použitá literatura

6 1. Úvod V této práci je řešena problematika návrhu digitálního řízení navíječky cívek. Práce vznikla v podstatě náhodou, když byla nalezena jedna kostra navíječky cívek. Jen tak mezi řečí, padlo, že by bylo zajímavé postavit k té kostře počítadlo. Při dalším přemýšlení přibývaly postupně nápady. Napřed, že by měla umět i odečítat otáčky při odvíjení, pak že by bylo dobré si moci zadat cílový počet závitů, další nápad byl, že by mohla sama i ovládat motor navíjení (odvíjení) a nakonec, že by bylo vhodné vyřešit i automatický posuv drátu, aby se drát nenavíjel jako chuchvalec, ale pěkně závit vedle závitu. A takto vznikla má maturitní práce. Dále zde budou rozebrány druhy navíječek, jejich výhody a nevýhody, požadavky na navíjení a způsob, jak jsem tuto problematiku řešil já. 2. Požadavky na navíjení cívek Navíjení cívek se dá řešit mnoha způsoby, od ručního navíjení počínaje, až po složité automatické navíječky, které umí navíjet i toroidní cívky Ruční navíjení Při úplném ručním navíjení, uživatel cívku navíjí sám pouze rukou. Navinuté závity si počítá uživatel také sám, může si pomoci tak, že si bude dělat čárku na papír např. po 10 závitech. Tento způsob je nejjednodušší ze všech, není k němu nic zapotřebí, není vhodný na navíjení cívek o velkém počtu závitů, protože uživatel, se může ztratit v počtu závitů, které již navinul. Tato metoda je vhodná např. pro vf cívky, které mají málo závitů (většinou jednotky až desítky závitů), ale vodič může být většího průměru (takového, jaký je uživatel schopný navinout vlastní silou). Toto ruční navíjení se dá vylepšit tak, že jádro, na které cívku navíjíme, připojíme k elektromotoru. Navinuté závity musí uživatel buď počítat ručně, nebo může na hřídel připojit mechanické počítadlo. Takové navíjení je rychlejší než úplně manuální, ale posun vodiče, aby byl závit vedle závitu, opět zůstává na uživateli. Tímto způsobem navíjení se dají navíjet již cívky s větším počtem závitů (řádově až stovky). Průměr vodiče, který budeme schopni navíjet, závisí na výkonu použitého motoru. 5

7 2.2. Automatické navíjení Nejjednodušší automatické navíjení je, pokud k jádru cívky připojíme elektromotor a elektronické počítadlo, na kterém nastavíme cílový počet závitů. Při navíjení se hodnota na počítadle dekrementuje a po dosažení nuly na počítadle se motor zastaví. Aby byl vodič na cívce dostatečně utažen, je nutné vodič napínat. Při napínání vodiče může dojít i k jeho zaseknutí a tak je vhodné u automatických systémů snímat, jestli vodič není zaseknutý a pokud je, tak zastavit navíjení. U těchto jednoduchých systémů si vystačíme i s jednoduchou logikou bez použití jednočipových mikropočítačů. Složitější navíječky řeší i posun vodiče, aby byla cívka pěkně závit vedle závitu. Toto již jsou poměrně složité systémy, ve kterých je většinou nutné ovládat dva elektromotory jeden navíjecí a druhý, který obstarává posun vodiče. U těchto systémů si již s jednoduchou logikou nevystačíme, a proto se zde již používají jednočipové mikropočítače a nebo PLC automaty. Nejsložitější jsou linky, které umí navíjet i toroidní cívky. Tyto systémy jsou velmi složité, rozměrné a nákladné. Řízení těchto navíjecích automatů bude obstarávat PLC automat. Tyto navíjecí automaty již dovedou navíjet téměř jakékoliv cívky. 6

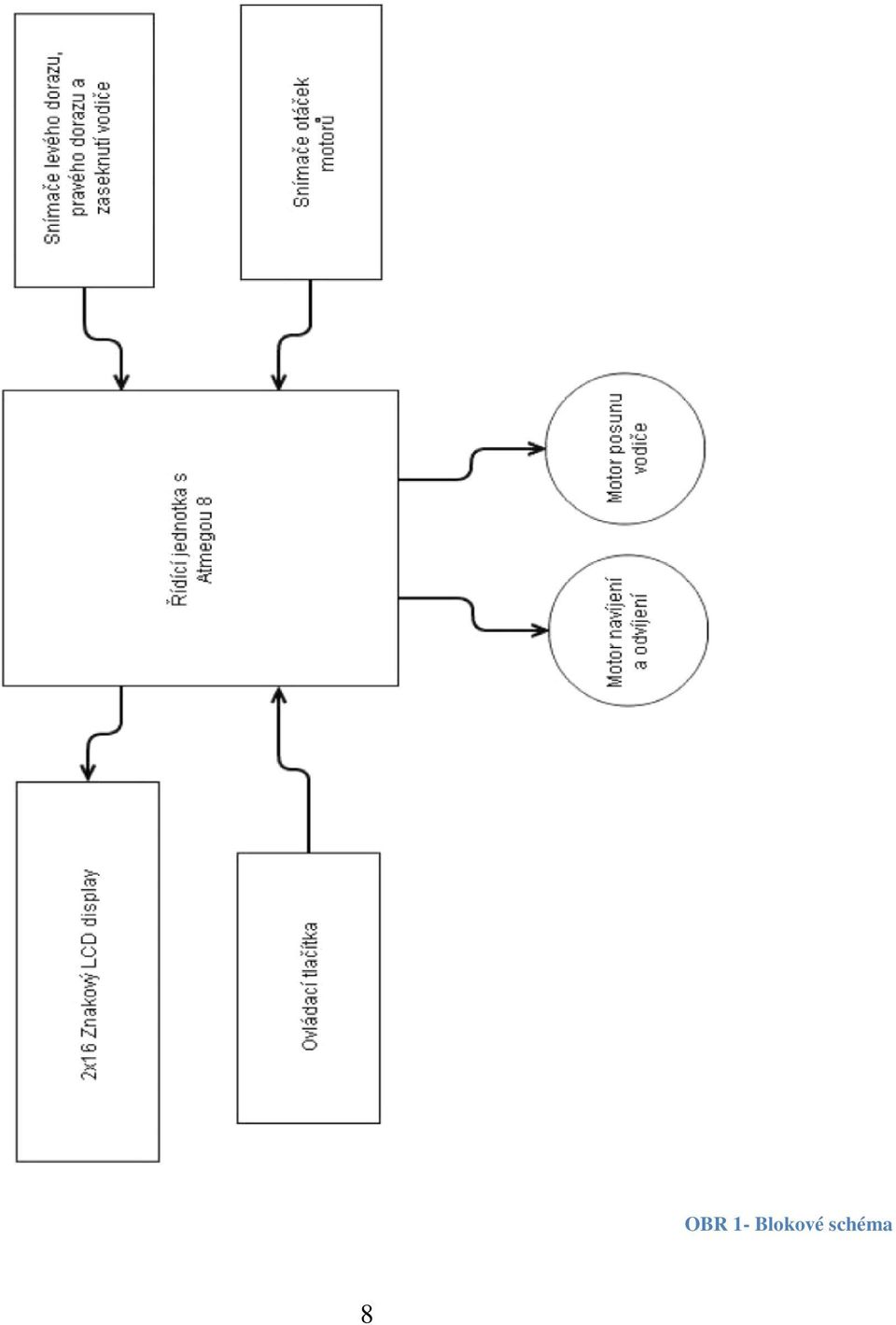
8 3. Návrh digitálního řízení Od mnou realizované navíječky očekávám, že bude umět navíjet a odvíjet cívky zcela automaticky. Uživatel si nejprve vybere, zda chce cívku navíjet nebo odvíjet. Následně vybere počet závitů. Pokud vybral navíjení, musí ještě zadat délku cívky, průřez vodiče a nastavit kladku na začátek cívky. Dále by navíječka měla zobrazovat počet navinutých závitů a počet závitů, které zbývají navinout. Celá navíječka je řízena jednočipovým mikropočítačem od firmy Atmel. Vybral jsem si čip z řady Atmega, z důvodu dostatečného výkonu a dostatečného počtu vstupně výstupních linek. Konkrétně jsem si vybral mikropočítač Atmega8, je to nejmenší zástupce řady Atmega, ale na tuto aplikaci dostačuje. Jako budiče jsem si vybral integrované obvody L293B, což jsou dva výkonové H-můstky pro buzení motorů v jednom pouzdře. Pro zobrazeníi je použit LCD display 2x16 znaků MC1602E. Navíječka se ovládá pomocí čtyř mikrospínačů (nahoru, dolů, potvrzení, zpět/zrušení) Pro snímání otáček může být použita optická brána, jedna na cívce, na kterou se navíjí a druhá na cívce, ze které je odvíjeno. Dále je připojen spínač na kladku, přes kterou jde vodič, pokud se vodič zasekne, kladka rozepne kontakt a zastaví navíjení. 7

9 8 OBR 1- Blokové schéma
10 3.1. Použité součástky Atmega 8 Atmega8 je nejmenší zástupce jednočipových mikropočítačů řady Mega firmy Atmel. Je to 8-bitový mikropočítač, má 8kB paměti flash pro program, 1kB paměti RAM a 512B paměti EEPROM. Je to RISC-ový mikropočítač, to znamená, že má redukovanou sadu instrukcí (má jich 130). Může být taktována až na 16MHz. Obsahuje 23 vstupně výstupních linek a většina z těchto linek může mít i specifické využití. Dále obsahuje: 2 x 8-bit časovač se samostatnou předděličkou 1 x 16-bit časovač se samostatnou předděličkou 2 x vstup externího přerušení 3 x PWM (Pulse with modulation) kanály 6 x A/D (analog to digital) převodník analogový komparátor programovatelnou sériovou linku (USART) vnitřní oscilátor 1; 2; 4; 8; MHz a další. OBR 2 - Atmega8 rozložení pinů 9
 kanály 6 x A/D (analog to")
11 L293B L293B je budič krokových motorů. Obsahuje dvojici výkonových H-můstků, podle katalogu tyto H-můstky mohou dát s chladičem proud až 1A na kanál a dokáže napájet motory až do 36V. U obou H-můstků lze povolit nebo zakázat jejich činnost vstupem CE (Chip enable). Pokud přivedeme na vstup Input1 LOG1 na výstupu Output1 Budič přivede napětí, které je připojeno na vstup V S. Pokud je na vstupu Input1 LOG0, je i na výstupu Output1 nulové napětí. Toto platí analogicky i pro ostatní vstupy a výstupy. OBR 3 - L293B rozložení pinů OBR 4 - L293B vnitřní blokové schéma 10

12 MC1602E MC1602E je znakový LCD display. Má dva řádky po 16 znacích. Je modře podsvícen pomocí LED. Display je řízen řadičem S6A0069 a každý znak je zobrazen na poli 5x8 bodů. Příkazy jsou posílány paralelně. Display umožňuje buď osmibitovou komunikaci, nebo čtyřbitovou komunikaci. OBR 5 - MC1602E sada znaků 11

13 Krokové motory Jako krokové motory byly použity bipolární krokové motory z tiskárny, které mi věnoval spolužák. Jeden krokový motor má 47 kroků na otáčku a větší sílu, proto byl použit na otáčení cívkou při navíjení, jelikož není potřeba takové přesnosti a je potřeba větší síly. Druhý krokový motor má 97 kroků na otáčku a menší sílu. Tento krokový motor byl použit na posun kladky, která vede vodič při navíjení, aby byl na výsledné cívce závit vedle závitu, zde je potřeba větší přesnosti a není potřeba velké síly. Bipolární krokové motory nemají vyvedený střed každé cívky, takže se musí ovládat tak, že u každé cívky přepínáme polaritu napětí. Což je žádá složitější budič většinou se používá plný H-můstek na každou cívku. OBR 6 - Vnitřní zapojení bipolárního krokového motoru A B C D přivedeno napájecí napětí 0 přivedeno nulové napětí OBR 7 - Řízení bipolárního motoru dvoufázově s plným krokem 12

14 4. Návrh mechanické konstrukce navíječky Bohužel úprava původní kostry by byla příliš složitá a bylo by jednodušší vyrobit novou, tak vznikl tento návrh, jak by navíječka mohla vypadat. OBR 8 - Nákres možného mechanického řešení navíječky 13

15 5. Dokumentace 5.1. Elektronická část Schéma a plošný spoj jsem navrhl v programu Eagle. Na obrázku níže je celé schéma digitálního řízení navíječky. Celá navíječka je řízena jednočipovým mikropočítačem Atmega8. V Atmeze8 je pro časování využíván vnitřní oscilátor, ten sice není tak přesný, jako kdyby byl použit externí krystalový oscilátor, ale v tomto zapojení není nic závislé na přesném časování. Tím jsou ušetřeny dva piny. O zobrazení údajů se stará LCD display, který je připojený čtyř vodičově na portc. PortC atmegy8 je pouze 7 pinový (ostatní porty jsou 8 pinové). Z toho je jeden pin využíván jako reset při programování, tudíž zbývá 6 linek, které display obsadí všechny. Trimrem P1 nastavíme optimální jas display. Ovládací tlačítka jsou připojena proti zemi a linky, na kterých jsou tlačítka připojena, jsou drženy v LOG1 pomocí pullup rezistorů o hodnotě 18k. V katalogu je udáváno, že maximální vstupní proud I ih je menší než 1uA, to znamená, že na rezistoru vzniká úbytek napětí menší než 18mV, takže LOG1 na vstupu je zaručena. Při stisku tlačítka dojde k uzemnění vstupu, a jelikož je odpor sepnutého spínače zanedbatelný vůči upínacímu rezistoru, je na vstupu LOG0. Tlačítko stop by mělo být realizováno rozpínacím kontaktem, ale sehnal jsem mikrospínače pouze se spínacím kontaktem, tak je i na stop spínač použit. Veškeré vstupy od snímačů jsou ošetřeny stejným způsobem, aby pokud není připojen snímač, nedocházelo k hazardním stavům a byla na vstupu jasně definovaná úroveň. Celý port D je nastaven jako vstupní, jelikož jsou na něj připojena ovládací tlačítka a senzory. Konkrétně tlačítko nahoru je na PD0, tlačítko dolů je na PD1, tlačítko potvrzení je na PD4 a tlačítko stop je na PD2 což je jeden ze dvou vstupů přerušení. Vstup přerušení, který je PD2 je INT0 a má vyšší prioritu než přerušení INT1 na vstupu PD3. Na vstup PD3 je připojeno přerušení od optické závory, snímající otáčku. Dále jsou na port D připojeny koncové spínače u konzole pro posun drátu při navíjení a spínač, indikující zaseknutí vodiče. Levý doraz je na PD5, pravý doraz je na PD6 a spínač zaseknutého vodiče je na PD7. Port B je nastaven jako výstupní, protože jsou k němu připojeny budiče krokových motorů (L293B) a ovládání, od které optické brány je bráno přerušení. 14
.")
16 OBR 9 Schéma řídící části 15

17 OBR 10 - Předloha pro desku plošných spojů 16

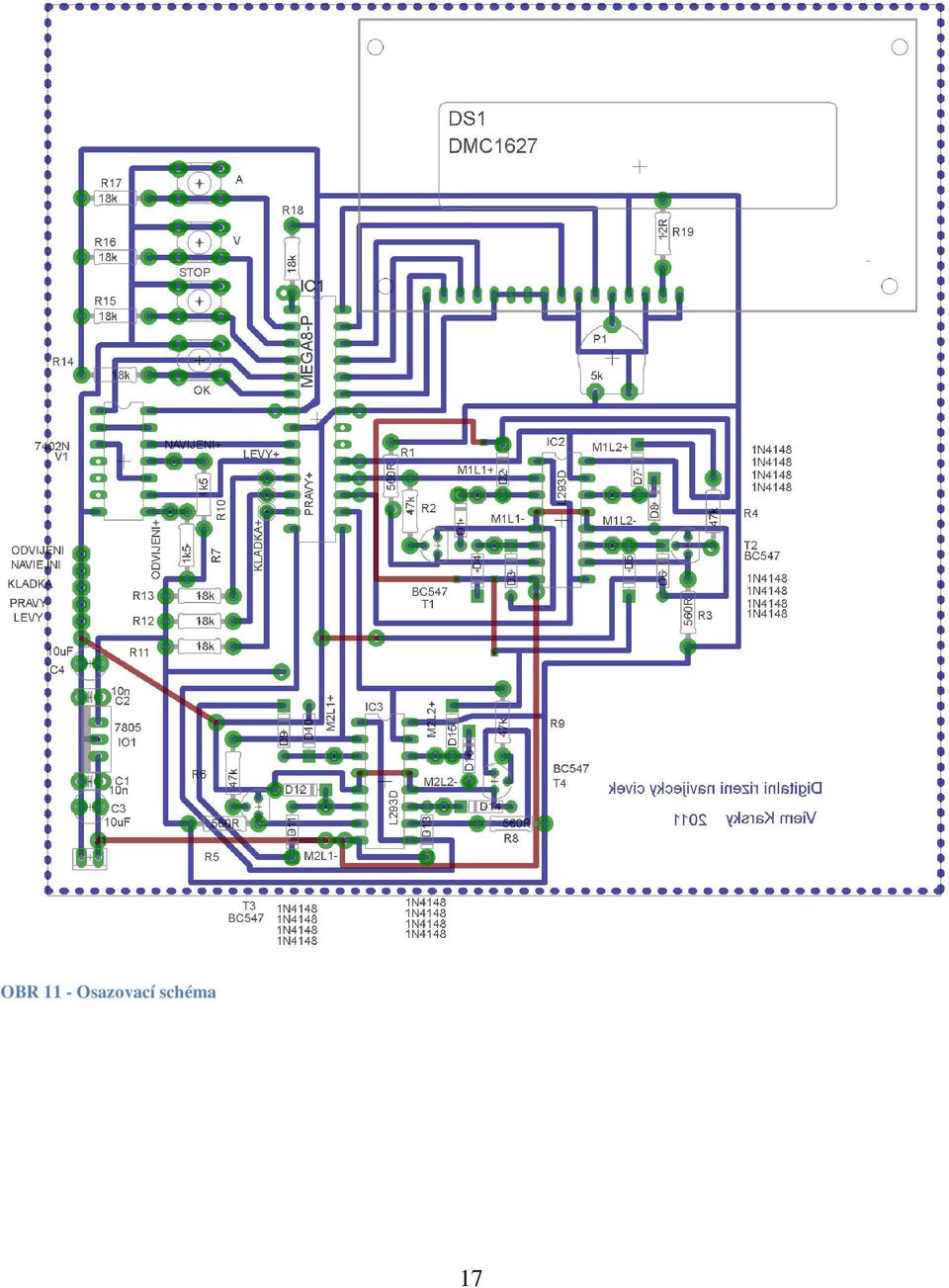
18 OBR 11 - Osazovací schéma 17
19 Dekodér přerušení Při navíjení je cívka, na kterou je navíjen vodič umístěna na hřídeli, na kterou je připojen krokový motor a na druhé hřídeli, které je volná, je připevněn zásobník vodiče. Otáčky tedy snímáme na cívce, ke které je připojen motor. Při odvíjení je cívka připevněna na místě pro zásobník vodiče a vodič z ní je odvíjen na cívku, která je na hřídeli s motorem. Takže při odvíjení musíme snímat otáčky na cívce, která je na místě zásobníku vodiče. Z toho plyne, že potřebujeme dva vstupy do jednočipového mikropočítače. Z důvodu snadnější programové obsluhy jsem chtěl snímače otáček připojit na vstupy přerušení Atmegy8. Bohužel Atmega8 má vstupy přerušení pouze dva a na jeden je již připojeno stop tlačítko, takže pro snímače otáček bylo nutné vymyslet dekodér přerušení. K vytvoření dekodéru přerušení jsem použil 3 hradla logického členu NOR. A B Y OBR 12 - Pravdivostní tabulka NOR Z tabulky je vidět, že pokud je alespoň na jednom vstupu hradla NOR LOG1, tak je na výstupu vždy LOG0 a této vlastnosti hradla NOR je využito v dekodéru přerušení. OBR 13 - Schéma dekodéru přerušení Podle schématu vidíme, že pokud je na vstupu povolení přerušení LOG1, je na výstupu hradla vždy LOG0, ať je na druhém vstupu jakákoli logická úroveň. Takže LOG1 na vstupu povolení přerušení nám blokuje vstup přerušení. Pokud je na obou vstupech povolení přerušení LOG1, je na obou výstupech hradel (a zároveň na vstupech třetího hradla) LOG0, tudíž je na výstupu LOG1. 18

20 Pokud přivedeme na vstup povolení přerušení od 1. vstupu LOG0 a na vstup povolení přerušení od 2. vstupu LOG1, je signál z 1. vstupu negován 1. hradlem NOR. Na výstupu druhého hradla je stále LOG0, takže tento vstup neovlivní výstup třetího hradla. A třetí hradlo znovu neguje signál z prvního hradla, to znamená, že se signál dostal z 1. vstupu na výstup. Toto platí analogicky i pro druhý vstup. Pokud bude na obou vstupech povolení přerušení LOG0, bude na výstupu 3. hradla logický součin obou vstupů přerušení. A to proto, že oba vstupy přerušení jsou hradly NOR napřed negovány, pak třetím hradlem NOR logicky sečteny a opět negovány, což odpovídá De Morganovým zákonům a Booleově algebře. De morganovy zákony říkají:. A podle zákonů Booleovy algebry, konkrétně podle zákonu dvojité negace, platí, že. Z toho vyplívá, že. Pov. Př. 1 Pov. Př. 2 Vstup 1 Vstup 2 Výstup Popis 1 1 X X 1 Oba vstupy povolení = 1 => výstup = X 0 Povolení 1 = 0 a Povolení 2 = X 1 => výstup = vstup X 0 0 Povolení 1 = 1 a Povolení 2 = X 1 1 => výstup = vstup X 0 Oba vstupy povolení = 0 => výstup je logický 0 0 X 0 0 součin obou vstupů (nevhodné pro dekodér přerušení tento stav by neměl nikdy nastat) X - znamená, že logická úroveň tohoto vstupu neovlivní výstup OBR 14 - Pravdivostní tabulka dekodéru přerušení Buzení krokových motorů Jak bylo napsáno výše, pro buzení krokových motorů používám H-můstkový budič L293B. V jednom pouzdře jsou dva celé H-můstky. Jako krokové motory používám bipolární krokové motory, které mají dvě cívky. Na každou cívku je potřeba jeden H-můstek. Takže na každý motor je potřeba jeden integrovaný obvod. Jak jsem psal výše, k řízení jednoho H-můstku jsou potřeba dohromady tři signály (Povolení činnosti H-můstku, sepnutí jedné poloviny H-můstky, sepnutí druhé poloviny H-můstku). Toto se dá zjednodušit, když si uvědomíme, že stačí, když cívku připojíme jednou stranou na plné napájecí napětí a druhou na nulové napětí a poté polaritu otočíme, nebudeme využívat stavu, kdy jednou cívkou neteče proud, takže stále oběma cívkami teče proud. Takovéto řízení se nazývá dvoufázové řízení s plným krokem. Když využijeme tohoto řízení, můžeme vždy na jeden vstup H-můstku přivést signál a zároveň tento signál negovat a přivést jej na druhý vstup. Tím budeme moci každý H-můstek ovládat pouze jedním signálem místo dvou signálů. To nám umožní řídit dva krokové motory čtyřmi vodiči místo osmi, sice tím přijdeme o 19

21 možnost řízení motorů s polovičním krokem a tím zvýšit počet kroků na otáčku na dvojnásobek, ale v této aplikaci to není nutné. Negovat řídící signály jde v podstatě dvěma způsoby buď pomocí dalšího integrovaného obvodu anebo pomocí tranzistoru v zapojení se společným emitorem ve spínacím režimu. V této aplikaci jsem využil tranzistoru a to z toho důvodu, že jsem nechtěl použit další integrovaný obvod a použití tranzistorů zjednoduší návrh plošného spoje. K negování signálů byl použit tranzistor BC547 h 21e katalog udává výpočet jsem prováděl s průměrnou hodnotou 325. Rezistor do kolektoru R c jsem zvolil 560R. Na rezistoru o hodnotě 560R vzniká úbytek napětí 5V, pokud ním prochází proud 8,9mA. Zanedbávám zde úbytek napětí na přechodu CE tranzistoru, protože potřebuji, aby se otevřel naplno a v hluboké saturaci může být úbytek na přechodu CE i 0,2V, pak by mohl být úbytek napětí na rezistoru maximálně 4,8V. Když budu počítat s proudem, který odpovídá úbytku napětí 5V na rezistoru o hodnotě 560R, mám jistotu, že se tranzistor určitě dostatečně otevře a navíc, pokud potřebuji tranzistor ve spínacím režimu, volí se proud do báze 3x 5x větší, než je nutné na otevření tranzistoru. Takže I c = 8,9mA. Proud do báze tranzistoru se vypočítá podle vztahu. Tranzistor je spínán z výstupu Atmegy8. Katalog udává, že atmega poskytuje v LOG1 4,2V. Úbytek na přechodu BE je 0,6V úbytek na rezistoru R b = 4,2-0,6 = 3,6V. Rezistor má hodnotu jsem měl, byl 47k.. Třetinový odpor má hodnotu 44,3k. Nejbližší odpor co Pokud hodnotu rezistoru dosadím do výpočtu, vyjde I b =76,6μA. I c počítaný pro nejhorší případ (nejmenší h 21e ) je. 19,15mA > 8,9mA tudíž je zaručeno, že se tranzistor vždy otevře. 20 OBR 15 - Zapojení budiče krokového motoru
22 Jak bylo vysvětleno výše, při dvoufázovém ovládání krokových motorů s plným krokem se vždy mění stav pouze jedné cívky a na ovládání jedné cívky je potřeba dvou vodičů. Dále jsem vysvětlil, že je možné každou cívku ovládat jedním vodičem a celý krokový motor dvěma vodiči. Kombinace stavů dvou vodičů jsou celkem čtyři, přičemž se mění, při každém kroku, signál vždy jen na jednom vodiči jedná se o Grayův kód. Další tabulka ukazuje jednotlivé stavy vodičů a jejich posloupnost, aby se krokový motor roztočil. Číslo kroku Ovládání 1. cívky Ovládání 2. cívky k cívce je připojeno napájecí napětí 0 k cívce není připojeno napájecí napětí OBR 16 - Jednotlivé stavy vodičů a jejich posloupnost, aby se motor roztočil 21
23 5.2. Programové řešení Program do jednočipového mikropočítače byl napsán a přeložen ve vývojovém prostředí Bascom-AVR Bascom-AVR je klon jazyka BASIC. Po zapnutí navíječky a zobrazení úvodní obrazovky, je uživatel vyzván k zadání zda, si přeje cívku navíjet nebo odvíjet. Pak je vyzván k zadání počtu závitů. Pokud bylo zadáno odvíjení, objeví se počítadlo s počtem odvinutých závitů a počtem zbývajících závitů. Pokud bylo zadáno navíjení, objeví se výzva k zadání průřezu vodiče, poté výzva k zadání délky cívky. Následně musí uživatel nastavit kladku na začátek cívky, odkud si přeje, aby byla cívka navíjena. A na konec se také zobrazí počítadlo, ukazující počet navinutých a počet zbývajících závitů. Pokud se během navíjení, nebo odvíjení zasekne vodič, okamžitě se zastaví motory a na display se objeví hláška Zaseknutí. Uživatel zde může buď tlačítkem stop navíjení přerušit a vrátit se k úvodnímu menu, nebo odstranit příčinu zaseknutí vodiče a tlačítkem potvrzení pokračovat v navíjení nebo odvíjení. Pokud je během navíjení nebo odvíjení stisknuto tlačítko stop, opět se celá navíječka zastaví a na display se zobrazí menu, kde si uživatel může vybrat, jestli si přeje zrušit navíjení nebo odvíjeni a skočit do úvodního menu anebo jestli si přeje v navíjení nebo odvíjení pokračovat Průběh menu Na následujícím obrázku je průběh jednotlivých obrazovek digitálního řízení navíječky cívek. 22

24 23 OBR 17 - Průběh menu
25 5.3. Ukázky části programu Jako první ukázku části programu jsem vybral menu, protože to mi dalo asi největší práci jej vymyslet. Těchto menu je v celém programu více, momentálně popíši to první, takto jednoduché menu, kde se vybírá pouze ze dvou položek, by se dalo realizovat i mnohem jednodušeji, ale změnou několika konstant může mít menu téměř neomezené množství položek (počet položek omezuje pouze velikost paměti jednočipového mikropočítače) Menu Hned na začátku úseku programu se do proměnné X se nastaví hodnota 1, to z důvodu, že zde začíná program a proměnná má hodnotu 0, jakmile program dalším příkazem skočí dále, kde je přepínač case, ten nemá definováno jak se zachovat, pokud proměnná má hodnotu 0 a program by se mohl chovat neočekávaně. Dále program skočí příkazem Goto na návěští Menu, kde narazí na příkaz Select Case X tento příkaz vezme hodnotu uloženou v proměnné X a podle ní vykoná činnost. Zde se proměnná X rovná 1, proto se provedou příkazy v bloku za Case 1. Vymaže se display a vypíše se na první řádek > Navíjení a na druhý řádek se vypíše Odvíjení. Příkazy za Case 2 jsou ignorovány. Následně program skočí na návěští Zacatek. Zde je nekonečná smyčka, která testuje, jestli bylo stisknuto tlačítko Dolu, Nahoru nebo Entr. Jak jsem psal výše, pokud je stisknuto tlačítko, objeví se na vstupu LOG0, proto mám v podmínce testující stisk tlačítka výraz alias pinu = 0. Pokud je stisknuto tlačítko Dolu, inkrementuje se proměnná X, takže se její obsah rovná 2. Další podmínkou je otestováno, jestli hodnota proměnné X nepřekročila rozsah a pokud ano, je nastavena na počáteční hodnotu (X=1). Následně program opět skočí na návěští Menu a jelikož proměnná X má hodnotu 2, vykoná se blok příkazů následující za Case 2. Opět se vymaže display, na první řádek se tentokráte vypíše > Odvíjení a na druhý řádek se vypíše Navíjení, poté program opět skočí na návěští Zacatek, kde dále testuje tlačítka. Pokud opět stiskneme tlačítko Dolu je proměnná X opět inkrementována a hodnota jejího obsahu je 3. Následující podmínka vyhodnotí, že je tato proměnná větší než dva a tak ji nastaví opět na 1. Poté program opět skočí na návěští menu a příkaz Select Case provede příkazy za Case 1 a vrátí se zpět na návěští Zacatek. Pokud zde stiskneme tlačítko Nahoru je proměnná X dekrementována, takže má hodnotu 0, to vyhodnotí opět další podmínka, že hodnota X je menší než 1 a nastaví hodnotu X na nejvyšší hodnotu (tady u toho menu na 2) a opět skočí na návěští Menu. Jelikož X = 2 provede se blok příkazů za Case 2, poté opět skočí na návěští Zacatek. Po opětovném stisku tlačítka Nahoru se opět proměnná X dekrementuje, tudíž X = 1. A opět program skočí na návěští Menu provede příkazy za Case 1 a skočí zpět. Po stisku tlačítka Entr program skočí na návěští Vyber a podle hodnoty X skočí na další 24
26 návěští. Zde pokud je hodnota X = 1, skočí na návěští Zadani_navijeni a pokud je hodnota X = 2, skočí na návěští Zadani_Odvijeni. Zde je výpis popisované části programu: 1 '-----menu X = 1 3 Goto Menu 4 5 Zacatek: 6 Do 7 If Dolu = 0 Then 8 X = X If X > 2 Then 10 X = 1 11 End If 12 Goto Menu 13 End If If Nahoru = 0 Then 16 X = X 1 17 If X <1 Then 18 X = 2 19 End If 20 Goto Menu 21 End If If Entr = 0 Then 24 Goto Vyber 25 End If 26 Loop Menu: 29 Select Case X 30 Case 1 31 Cls 32 Locate 1, 1 33 Lcd "> Navijeni" 34 Locate 2, 3 35 Lcd "Odvijeni" 36 Case 2 37 Cls 38 Locate 1, 1 39 Lcd "> Odvijeni" 40 Locate 2, 3 41 Lcd "Navijeni" 42 End Select 43 Goto Zacatek Vyber: 46 If X = 1 Then 47 Goto Zadani_navijeni 48 End If If X = 2 Then 51 Goto Zadani_odvijeni 52 End If 25
27 Ovládání krokových motorů Další část programu je způsob, jakým jsem řešil ovládání krokových motorů. Jak jsem popsal výše, krokový motor ovládám dvěma vodiči, ale bohužel nejsou ovládány obyčejným binárním kódem ale Grayovým kódem. Zde vidíte, jakým způsobem jsem tento problém řešil já, toto řešení ovšem není vhodné, pokud by bylo nutné generovat Grayův kód pro více bitů, protože s každým bitem se zdvojnásobí počet možných stavů. Tato část programu běží neustále v cyklu, dokud není splněna podmínka, že počet navinutý závitů je roven počtu závitů zadaných. Jakmile je tato podmínka splněna cyklus se dále neprovádí a program pokračuje příkazy za tímto cyklem. Počet navinutých závitů se počítá pomocí přerušení v jiné části programu, zde se pouze vyhodnocuje podmínka. Před začátkem cyklu je vynulován obsah proměnné Y, která slouží uvnitř cyklu k počítání, který krok se má provést. Pokud vynulování obsahu proměnné před začátkem cyklu neprovedeme a budeme proměnou používat i na jiném místě v programu, může v některých cyklech neočekávaná hodnota proměnné způsobit špatnou funkci programu. V tomto cyklu je sice hodnota proměnné ošetřena podmínkami na začátku cyklu, ale obecně je lepší vynulování provést. První příkaz uvnitř cyklu Povol_nav = 0 způsobí, že se objeví LOG0 na pinu, kde je připojen dekodér přerušení a tím povolí počítání otáček při navíjení. Další příkaz Mot1_e = 1 nastaví LOG1 na pin, na který jsou připojeny povolovací vstupy H-můstkového budiče motoru, který otáčí cívkou. Pokud na tento pin nenastavíme LOG1, motor se nebude točit, protože budič na něj nebude přivádět napětí. Další příkaz inkrementuje obsah proměnné Y, protože na začátku se obsah proměnné rovnal nule, je teď hodnota obsahu rovna jedné. Následující podmínka kontroluje, jestli hodnota proměnné není větší než počet kroků, v tomto případě jestli není hodnota proměnné větší než čtyři. Pokud by byla hodnota proměnné větší než čtyři, byla by změněna na jedna. Další podmínka kontroluje, jestli hodnota proměnné není menší než 1, pokud ano, je změněna její hodnota na 1. Následující příkaz je Select Case Y, který provede příkazy podle hodnoty Y. Nyní, když je hodnota Y = 1, provedou se příkazy následující za Case 1. Těmito příkazy jsou nastaveny výstupní linky, které ovládají budič krokového motoru, do LOG0. Další příkaz, který se provede je příkaz Waitms 35, ten způsobí, že program 35ms čeká. Čekání je nutné, jelikož Atmega8 by jinak měnila hodnotu na výstupech příliš rychle a krokový motor by nestačil reagovat. Dále program na příkaz Wend, ten mu říká, že má opět skočit na začátek cyklu. Opět zkontroluje, zdali není splněna podmínka a pokud není, dále pokračuje tělem cyklu. Opět nastaví Povol_nav = 0 a Mot_e1=1, pokud stav pinů, kterým odpovídají tyto aliasy, nebyl změně, nic se nezmění. Dále inkrementuje hodnotu proměnné Y (hodnota Y by se měla rovna dvěma), která je porovnána podmínkami, jestli vyhovuje rozsahu. Příkaz Select Case Y tentokrát vykoná část za Case 2. Tato část nastaví pátý pin portu B Atmegy8 do LOG0 a čtvrtý pin portu B Atmegy8 do LOG1. Opět proběhne čekání, skok na začátek cyklu, porovnání, jestli není splněna podmínka a pokud ne, je opět inkrementována hodnota proměnné Y. Takže hodnota proměnné Y je 3. Příkaz Select Case 26
28 Y provede příkazy za Case 3. Tyto příkazy nastaví piny čtyři a pět portu B Atmegy8 oba do LOG1. Dále to jde stejně a hodnota proměnné Y je 4, příkaz Select Case Y provede příkazy tentokrát za Case 4. Zde je pin pět portu B Atmegy8 nastaven do LOG1 a pin čtyři portu B Atmegy8 do LOG0. Při dalším průběhu, je opět hodnota proměnné Y inkrementována a Y má hodnotu 5. Protože 5 je větší než 4, vyhodnotí to první podmínka uvnitř cyklu a nastaví hodnotu proměnné Y na 1. Dále již je to stejné jako u prvního průběhu cyklem. Tento cyklus se neustále opakuje, dokud není dosažen cílový počet závitů. Dále je uvedena popisovaná část programu: Y = 0 While Navinute_zavity = Zadany_pocet_zavitu Povol_nav = 0 Mot1_e = 1 Incr Y If Y > 4 Then Y = 1 End If If Y < 1 Then Y = 1 End If Select Case Y Case 1 Portb.5 = 0 Portb.4 = 0 Case 2 Portb.5 = 0 Portb.4 = 1 Case 3 Portb.5 = 1 Portb.4 = 1 Case 4 Portb.5 = 1 Portb.4 = 0 End Select Waitms 35 Wend 27
29 6. Ověření funkcí řízení navíječky Veškeré funkce byly ručně otestovány na testovacím přípravku. Jako koncové spínače a snímač zaseknutí vodiče byly použity přepínače a jako senzory otáček byly použity tlačítka. Na hřídele motorů byly připevněny terče, aby bylo dobře patrné, zda se motor otáčí, případně na kterou stranu. Veškeré funkce fungují tak jak bylo stanoveno. 28
30 7. Fotografie zařízení OBR 18 - Řídící část OBR 19 - Tlačítka 29
31 OBR 20 - Pohled na celé zařízení 30
32 8. Resumé U navíječky se mi povedlo úspěšně realizovat veškeré funkce, které byly stanoveny. Navíječka cívek umožňuje jak navíjení, tak odvíjení cívek do maximálního počtu závitů Při odvíjení uživatel zadá pouze počet závitů, které mají být odvinuty. Při navíjení uživatel zadá počet závitů, které mají být navinuty, průřez vodiče, délku cívky a nastaví kladku posunu vodiče na začátek cívky. Při zkoušení vše funguje, jak bylo zadáno, pouze při použití ve skutečné navíječce by bylo dobré vyměnit budiče krokových motorů za výkonnější, aby mohly být použity silnější krokové motory. I realized all funcions wich was assign. Coil winder allows winding the coils and unwinding the coils. In unwinding coils user enter a nubmber of coils, wich he wants to unwide. In windingcoils user enter a number of coils, cross section of cabel, lenght of coil and set roller to start of coil. All functions works as was assign, only if it uses in real coil winder, it will be good to replace driver of stepper motor with a more powerful driver and use more powerful stepper motor. 31
33 9. Seznam obrázků OBR 1- Blokové schéma... 8 OBR 2 - Atmega8 rozložení pinů... 9 OBR 3 - L293B rozložení pinů OBR 4 - L293B vnitřní blokové schéma OBR 5 - MC1602E sada znaků OBR 7 - Řízení bipolárního motoru dvoufázově s plným krokem OBR 6 - Vnitřní zapojení bipolárního krokového motoru OBR 8 - Nákres možného mechanického řešení navíječky OBR 9 Schéma řídící části OBR 10 - Předloha pro desku plošných spojů OBR 11 - Osazovací schéma OBR 12 - Pravdivostní tabulka NOR OBR 13 - Schéma dekodéru přerušení OBR 14 - Pravdivostní tabulka dekodéru přerušení OBR 15 - Zapojení budiče krokového motoru OBR 16 - Jednotlivé stavy vodičů a jejich posloupnost, aby se motor roztočil OBR 17 - Průběh menu OBR 18 - Řídící část OBR 19 - Tlačítka OBR 20 - Pohled na celé zařízení
34 10. Použitá literatura 1. Katalogové listy Atmega Katalogové listy L293B Katalogové listy MC1602E Odkaz na program Bascom AVR Odkaz na program Eagle
ULTRAZVUKOVÝ DÁLKOMĚR
 Středoškolská technika 2010 Setkání a prezentace prací středoškolských studentů na ČVUT ULTRAZVUKOVÝ DÁLKOMĚR Tomáš Pelikán, Václav Vejvoda Střední průmyslová škola dopravní, a.s. Plzeňská 102/219, 150
Středoškolská technika 2010 Setkání a prezentace prací středoškolských studentů na ČVUT ULTRAZVUKOVÝ DÁLKOMĚR Tomáš Pelikán, Václav Vejvoda Střední průmyslová škola dopravní, a.s. Plzeňská 102/219, 150
3. D/A a A/D převodníky
 3. D/A a A/D převodníky 3.1 D/A převodníky Digitálně/analogové (D/A) převodníky slouží k převodu číslicově vyjádřené hodnoty (např. v úrovních TTL) ve dvojkové soustavě na hodnotu nějaké analogové veličiny.
3. D/A a A/D převodníky 3.1 D/A převodníky Digitálně/analogové (D/A) převodníky slouží k převodu číslicově vyjádřené hodnoty (např. v úrovních TTL) ve dvojkové soustavě na hodnotu nějaké analogové veličiny.
Zkouškové otázky z A7B31ELI
 Zkouškové otázky z A7B31ELI 1 V jakých jednotkách se vyjadřuje napětí - uveďte název a značku jednotky 2 V jakých jednotkách se vyjadřuje proud - uveďte název a značku jednotky 3 V jakých jednotkách se
Zkouškové otázky z A7B31ELI 1 V jakých jednotkách se vyjadřuje napětí - uveďte název a značku jednotky 2 V jakých jednotkách se vyjadřuje proud - uveďte název a značku jednotky 3 V jakých jednotkách se
Analyzátor, minimalizátor kombinačních logických obvodů
 Středoškolská technika 2012 Setkání a prezentace prací středoškolských studentů na ČVUT Analyzátor, minimalizátor kombinačních logických obvodů Petr Jašek, Pavel Král, Petr Koukolíček SPŠ a VOŠ Jana Palacha
Středoškolská technika 2012 Setkání a prezentace prací středoškolských studentů na ČVUT Analyzátor, minimalizátor kombinačních logických obvodů Petr Jašek, Pavel Král, Petr Koukolíček SPŠ a VOŠ Jana Palacha
LED_007.c Strana: 1/5 C:\Michal\AVR\Výukové programy\archiv\ Poslední změna: 4.10.2011 8:01:48
 LED_007.c Strana: 1/5 Nyní již umíme používat příkazy k větvení programu (podmínky) "if" a "switch". Umíme také rozložit program na jednoduché funkce a používat cyklus "for". Co se týče cyklů, zbývá nám
LED_007.c Strana: 1/5 Nyní již umíme používat příkazy k větvení programu (podmínky) "if" a "switch". Umíme také rozložit program na jednoduché funkce a používat cyklus "for". Co se týče cyklů, zbývá nám
Stopař pro začátečníky
 Stopař pro začátečníky Miroslav Sámel Před nějakou dobou se na http://letsmakerobots.com/node/8396 objevilo zajímavé a jednoduché zapojení elektroniky sledovače čáry. Zejména začínající robotáři mají problémy
Stopař pro začátečníky Miroslav Sámel Před nějakou dobou se na http://letsmakerobots.com/node/8396 objevilo zajímavé a jednoduché zapojení elektroniky sledovače čáry. Zejména začínající robotáři mají problémy
Způsoby realizace paměťových prvků
 Způsoby realizace paměťových prvků Interní paměti jsou zapojeny jako matice paměťových buněk. Každá buňka má kapacitu jeden bit. Takováto buňka tedy může uchovávat pouze hodnotu logická jedna nebo logická
Způsoby realizace paměťových prvků Interní paměti jsou zapojeny jako matice paměťových buněk. Každá buňka má kapacitu jeden bit. Takováto buňka tedy může uchovávat pouze hodnotu logická jedna nebo logická
CLG-03 POČÍTADLO PROVOZNÍCH HODIN
 CLG-03 POČÍTADLO PROVOZNÍCH HODIN Na výrobky společnosti F&F se vztahuje záruka v délce 24 měsíců od data nákupu Určení CLG-03 je programovatelné, multifunkční elektronické počítadlo, které umožňuje sčítat
CLG-03 POČÍTADLO PROVOZNÍCH HODIN Na výrobky společnosti F&F se vztahuje záruka v délce 24 měsíců od data nákupu Určení CLG-03 je programovatelné, multifunkční elektronické počítadlo, které umožňuje sčítat
STAVEBNÍ NÁVODY 1 pro činnost v elektro a radio kroužcích a klubech
 STAVEBNÍ NÁVODY 1 pro činnost v elektro a radio kroužcích a klubech Nejjednodušší stavební návody Verze V.4, stav k 5. prosinci 2014. Byl upraven Stavební návod na Cvrčka. Víte o dalších zajímavých návodech?
STAVEBNÍ NÁVODY 1 pro činnost v elektro a radio kroužcích a klubech Nejjednodušší stavební návody Verze V.4, stav k 5. prosinci 2014. Byl upraven Stavební návod na Cvrčka. Víte o dalších zajímavých návodech?
evodníky Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251
 Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření A/D a D/A převodnp evodníky Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251 A/D a D/A převodníky 1 Důvody převodu signálů
Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření A/D a D/A převodnp evodníky Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251 A/D a D/A převodníky 1 Důvody převodu signálů
PK Design. MB-ATmega16/32 v2.0. Uživatelský manuál. Základová deska modulárního vývojového systému MVS. Verze dokumentu 1.0 (21.12.
 MB-ATmega16/32 v2.0 Základová deska modulárního vývojového systému MVS Uživatelský manuál Verze dokumentu 1.0 (21.12.2004) Obsah 1 Upozornění... 3 2 Úvod... 4 2.1 Vlastnosti základové desky...4 2.2 Vlastnosti
MB-ATmega16/32 v2.0 Základová deska modulárního vývojového systému MVS Uživatelský manuál Verze dokumentu 1.0 (21.12.2004) Obsah 1 Upozornění... 3 2 Úvod... 4 2.1 Vlastnosti základové desky...4 2.2 Vlastnosti
STŘEDOŠKOLSKÁ TECHNIKA 2013
 STŘEDOŠKOLSKÁ TECHNIKA 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Návrh systému inteligentního domu Pavel Mikšík Brno 2013 Setkání a prezentace prací středoškolských studentů na ČVUT
STŘEDOŠKOLSKÁ TECHNIKA 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Návrh systému inteligentního domu Pavel Mikšík Brno 2013 Setkání a prezentace prací středoškolských studentů na ČVUT
Převodníky f/u, obvod NE555
 Převodníky f/u, obvod NE555 Na tomto cvičení byste se měli seznámit s funkcí jednoduchého převodníku kmitočet/napětí sestaveného z dvojice operačních zesilovačů. Dále byste se měli seznámit s obvodem NE555.
Převodníky f/u, obvod NE555 Na tomto cvičení byste se měli seznámit s funkcí jednoduchého převodníku kmitočet/napětí sestaveného z dvojice operačních zesilovačů. Dále byste se měli seznámit s obvodem NE555.
TEPL2344 Technická dokumentace PŘEVODNÍK TEPLOTY. typ TEPL2344 s rozhraním RS232. www.aterm.cz
 PŘEVODNÍK TEPLOTY typ TEPL2344 s rozhraním RS232 www.aterm.cz 1 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku
PŘEVODNÍK TEPLOTY typ TEPL2344 s rozhraním RS232 www.aterm.cz 1 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku
Návrh konstrukce odchovny 2. dil
 1 Portál pre odborné publikovanie ISSN 1338-0087 Návrh konstrukce odchovny 2. dil Pikner Michal Elektrotechnika 19.01.2011 V minulem dile jsme si popsali návrh konstrukce odchovny. senzamili jsme se s
1 Portál pre odborné publikovanie ISSN 1338-0087 Návrh konstrukce odchovny 2. dil Pikner Michal Elektrotechnika 19.01.2011 V minulem dile jsme si popsali návrh konstrukce odchovny. senzamili jsme se s
ELEKTRONICKÁ ČASOMÍRA
 Středoškolská technika 2011 Setkání a prezentace prací středoškolských studentů na ČVUT ELEKTRONICKÁ ČASOMÍRA Šárka Vávrová SPŠ elektrotechniky, informatiky a řemesel, Frenštát pod Radhoštěm, p. o. Křižíkova
Středoškolská technika 2011 Setkání a prezentace prací středoškolských studentů na ČVUT ELEKTRONICKÁ ČASOMÍRA Šárka Vávrová SPŠ elektrotechniky, informatiky a řemesel, Frenštát pod Radhoštěm, p. o. Křižíkova
Microchip. PICmicro Microcontrollers
 Microchip PICmicro Microcontrollers 8-bit 16-bit dspic Digital Signal Controllers Analog & Interface Products Serial EEPROMS Battery Management Radio Frequency Device KEELOQ Authentication Products Návrh
Microchip PICmicro Microcontrollers 8-bit 16-bit dspic Digital Signal Controllers Analog & Interface Products Serial EEPROMS Battery Management Radio Frequency Device KEELOQ Authentication Products Návrh
cvičebnice Kolektiv autorů:
 PROJEKTOVÉ VYUČOVÁNÍ cvičebnice Kolektiv autorů: Ing. Josef Malinka Ing. Jana Horáková Stanislav Sýkora Bc. Antonín Pálka Ing. Helena Jagošová Jan Podškubka Ing. Stanislav Velfl Ing. Zdeněk Velfl Uherské
PROJEKTOVÉ VYUČOVÁNÍ cvičebnice Kolektiv autorů: Ing. Josef Malinka Ing. Jana Horáková Stanislav Sýkora Bc. Antonín Pálka Ing. Helena Jagošová Jan Podškubka Ing. Stanislav Velfl Ing. Zdeněk Velfl Uherské
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Univerzální jednočipový modul pro řízení krokových motorů
 Středoškolská odborná činnost 2005/2006 Obor 10 elektrotechnika, elektronika, telekomunikace a technická informatika Univerzální jednočipový modul pro řízení krokových motorů Autor: Jan Fíla SPŠ Trutnov,
Středoškolská odborná činnost 2005/2006 Obor 10 elektrotechnika, elektronika, telekomunikace a technická informatika Univerzální jednočipový modul pro řízení krokových motorů Autor: Jan Fíla SPŠ Trutnov,
Signálové a mezisystémové převodníky
 Signálové a mezisystémové převodníky Tyto převodníky slouží pro generování jednotného nebo unifikovaného signálu z přirozených signálů vznikajících v čidlech. Často jsou nazývány vysílači příslušné fyzikální
Signálové a mezisystémové převodníky Tyto převodníky slouží pro generování jednotného nebo unifikovaného signálu z přirozených signálů vznikajících v čidlech. Často jsou nazývány vysílači příslušné fyzikální
Nabíječ NiCd a NiMh článků řízený mikroprocesorem
 Nabíječ NiCd a NiMh článků řízený mikroprocesorem Bc. Michal Brázda Univerzita Tomáše Bati ve Zlíně Fakulta Aplikované informatiky 1. Obsah 1. Obsah... 2 2. Úvod... 3 3. NiCd a NiMh baterie... 3 3.1. Metoda
Nabíječ NiCd a NiMh článků řízený mikroprocesorem Bc. Michal Brázda Univerzita Tomáše Bati ve Zlíně Fakulta Aplikované informatiky 1. Obsah 1. Obsah... 2 2. Úvod... 3 3. NiCd a NiMh baterie... 3 3.1. Metoda
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Registrační teploměr
 Popis zapojení: Registrační teploměr ukládá aktuální teplotu do paměti EEPROM v intervalu jedné hodiny. Zařízení je vybaveno zdrojem reálného času (RTC), který zároveň probouzí mikroprocesor ze stavu spánku.
Popis zapojení: Registrační teploměr ukládá aktuální teplotu do paměti EEPROM v intervalu jedné hodiny. Zařízení je vybaveno zdrojem reálného času (RTC), který zároveň probouzí mikroprocesor ze stavu spánku.
Vyšší odborná škola a Střední průmyslová škola, Šumperk, Gen. Krátkého 1, 787 29 Šumperk
 Středoškolská technika 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Řídicí jednotka hodin s DCF David Uherko E4 Vyšší odborná škola a Střední průmyslová škola, Šumperk, Gen. Krátkého
Středoškolská technika 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Řídicí jednotka hodin s DCF David Uherko E4 Vyšší odborná škola a Střední průmyslová škola, Šumperk, Gen. Krátkého
Návrh a realizace počítače skóre. Počítače skóre. Michal Černý. VOŠ a SŠSE Novovysočanská 48/280 Praha 9
 Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Počítače skóre Michal Černý VOŠ a SŠSE Novovysočanská 48/280 Praha 9 Úvod Počítač skóre slouží divákům k lepší orientaci
Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Počítače skóre Michal Černý VOŠ a SŠSE Novovysočanská 48/280 Praha 9 Úvod Počítač skóre slouží divákům k lepší orientaci
Maturitní témata - PRT 4M
 Maturitní témata - PRT 4M ústní zkouška profilové části Maturita - školní rok 2015/2016 1. Architektura mikrořadičů a PC 2. Popis mikrořadičů řady 51 3. Zobrazovací jednotky 4. Řadiče Atmel 5. Hradlová
Maturitní témata - PRT 4M ústní zkouška profilové části Maturita - školní rok 2015/2016 1. Architektura mikrořadičů a PC 2. Popis mikrořadičů řady 51 3. Zobrazovací jednotky 4. Řadiče Atmel 5. Hradlová
65-410 Univerzální modulový stmívac 1400 VA e
 Návod na montáž a používání 1. Použití Pro rízení intenzity osvetlení (svetelného toku) všech stmívatelných záteží s výjimkou zárivek. Stmívac je vhodný pro stmívání odporové, indukcní nebo kapacitní záteže
Návod na montáž a používání 1. Použití Pro rízení intenzity osvetlení (svetelného toku) všech stmívatelných záteží s výjimkou zárivek. Stmívac je vhodný pro stmívání odporové, indukcní nebo kapacitní záteže
Tranzistor polopatě. Tranzistor jako spínač
 Tranzistor polopatě Ing. Jiří Bezstarosti Úlohou toho článku není vysvětlit fyzikální činnost tranzistoru, ale spíše naznačit způsoby jeho použití. Zároveň se tento článek bude snažit vysvětlit problematiku
Tranzistor polopatě Ing. Jiří Bezstarosti Úlohou toho článku není vysvětlit fyzikální činnost tranzistoru, ale spíše naznačit způsoby jeho použití. Zároveň se tento článek bude snažit vysvětlit problematiku
Laboratorní zdroj - 6. část
 Laboratorní zdroj - 6. část Publikované: 20.05.2016, Kategória: Silové časti www.svetelektro.com V tomto článku popíšu způsob, jak dojít k rovnicím (regresní funkce), které budou přepočítávat milivolty
Laboratorní zdroj - 6. část Publikované: 20.05.2016, Kategória: Silové časti www.svetelektro.com V tomto článku popíšu způsob, jak dojít k rovnicím (regresní funkce), které budou přepočítávat milivolty
SNÍMAČ T0110. Programovatelný snímač teploty s výstupem 4-20 ma. Návod k použití
 SNÍMAČ T0110 Programovatelný snímač teploty s výstupem 4-20 ma Návod k použití Návod na použití snímače T0110 Snímač je určen pro měření okolní teploty ve C nebo F. Měřicí senzor teploty je neodnímatelnou
SNÍMAČ T0110 Programovatelný snímač teploty s výstupem 4-20 ma Návod k použití Návod na použití snímače T0110 Snímač je určen pro měření okolní teploty ve C nebo F. Měřicí senzor teploty je neodnímatelnou
Inovace výuky předmětu Robotika v lékařství
 Přednáška 7 Inovace výuky předmětu Robotika v lékařství Senzory a aktuátory používané v robotických systémech. Regulace otáček stejnosměrných motorů (aktuátorů) Pro pohon jednotlivých os robota jsou často
Přednáška 7 Inovace výuky předmětu Robotika v lékařství Senzory a aktuátory používané v robotických systémech. Regulace otáček stejnosměrných motorů (aktuátorů) Pro pohon jednotlivých os robota jsou často
ETC Embedded Technology Club setkání 6, 3B zahájení třetího ročníku
 ETC Embedded Technology Club setkání 6, 3B 13.11. 2018 zahájení třetího ročníku Katedra měření, Katedra telekomunikací,, ČVUT- FEL, Praha doc. Ing. Jan Fischer, CSc. ETC club,6, 3B 13.11.2018, ČVUT- FEL,
ETC Embedded Technology Club setkání 6, 3B 13.11. 2018 zahájení třetího ročníku Katedra měření, Katedra telekomunikací,, ČVUT- FEL, Praha doc. Ing. Jan Fischer, CSc. ETC club,6, 3B 13.11.2018, ČVUT- FEL,
REZISTIVNÍ DOTYKOVÉ OBRAZOVKY A VYUŽITÍ V UNIVERZÁLNÍM REGULÁTORU Resistive Touch Screens and Usage in a Universal Controller
 REZISTIVNÍ DOTYKOVÉ OBRAZOVKY A VYUŽITÍ V UNIVERZÁLNÍM REGULÁTORU Resistive Touch Screens and Usage in a Universal Controller Martin Novák Abstrakt: This paper presents the principles of resistive analog
REZISTIVNÍ DOTYKOVÉ OBRAZOVKY A VYUŽITÍ V UNIVERZÁLNÍM REGULÁTORU Resistive Touch Screens and Usage in a Universal Controller Martin Novák Abstrakt: This paper presents the principles of resistive analog
Číslicový otáčkoměr TD 5.1 AS
 Číslicový otáčkoměr TD 5.1 AS Zjednodušená verze otáčkoměru řady TD 5.1 bez seriové komunikace, která obsahuje hlídání protáčení a s možností nastavení 4 mezí pro sepnutí relé. Určení - číslicový otáčkoměr
Číslicový otáčkoměr TD 5.1 AS Zjednodušená verze otáčkoměru řady TD 5.1 bez seriové komunikace, která obsahuje hlídání protáčení a s možností nastavení 4 mezí pro sepnutí relé. Určení - číslicový otáčkoměr
MenuLIB KNIHOVNA SIMPLE4 PRO TVORBU UŽIVATELSKÉHO ROZHRANÍ NA PLC MICROPEL 02.2005
 MenuLIB KNIHOVNA SIMPLE4 PRO TVORBU UŽIVATELSKÉHO ROZHRANÍ NA PLC MICROPEL 02.2005 MenuLIB V2.0 Knihovní funkce v jazyce SIMPLE4 pro snadnou tvorbu uživatelského ovládacího rozhraní ve stylu nabídkového
MenuLIB KNIHOVNA SIMPLE4 PRO TVORBU UŽIVATELSKÉHO ROZHRANÍ NA PLC MICROPEL 02.2005 MenuLIB V2.0 Knihovní funkce v jazyce SIMPLE4 pro snadnou tvorbu uživatelského ovládacího rozhraní ve stylu nabídkového
Rozhraní mikrořadiče, SPI, IIC bus,..
 Rozhraní mikrořadiče, SPI, IIC bus,.. Přednáška A3B38MMP 2013 kat. měření, ČVUT - FEL, Praha J. Fischer A3B38MMP, 2013, J.Fischer, kat. měření, ČVUT - FEL, Praha 1 Rozhraní SPI Rozhraní SPI ( Serial Peripheral
Rozhraní mikrořadiče, SPI, IIC bus,.. Přednáška A3B38MMP 2013 kat. měření, ČVUT - FEL, Praha J. Fischer A3B38MMP, 2013, J.Fischer, kat. měření, ČVUT - FEL, Praha 1 Rozhraní SPI Rozhraní SPI ( Serial Peripheral
DM4.3 odmagnetovací modul
 DM4.3 odmagnetovací modul Význam kontrolek (LED ) na desce LD1 zelená LED svítí při magnetování. LD2 červená LED bliká při odmagnetování. LD3 modrá LED po celou dobu magnetování od okamžiku plného zamagnetování.
DM4.3 odmagnetovací modul Význam kontrolek (LED ) na desce LD1 zelená LED svítí při magnetování. LD2 červená LED bliká při odmagnetování. LD3 modrá LED po celou dobu magnetování od okamžiku plného zamagnetování.
TENZOMETRICKÝ MĚŘIČ. typ Tenz2293. www.aterm.cz
 TENZOMETRICKÝ MĚŘIČ typ Tenz2293 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku byla doložena shoda s příslušnými
TENZOMETRICKÝ MĚŘIČ typ Tenz2293 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku byla doložena shoda s příslušnými
Digitronové digitální hodiny
 Středoškolská technika 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Digitronové digitální hodiny Jakub Rezek Radek VOKOUN Obsah Úvod... 2 Popis výrobku... 3 Funkce digitronu... 3 Popis
Středoškolská technika 2013 Setkání a prezentace prací středoškolských studentů na ČVUT Digitronové digitální hodiny Jakub Rezek Radek VOKOUN Obsah Úvod... 2 Popis výrobku... 3 Funkce digitronu... 3 Popis
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky a mezioborových inženýrských studií Katedra elektrotechniky a elektromechanických systémů Ing. Pavel Rydlo KROKOVÉ MOTORY A JEJICH ŘÍZENÍ Studijní texty
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky a mezioborových inženýrských studií Katedra elektrotechniky a elektromechanických systémů Ing. Pavel Rydlo KROKOVÉ MOTORY A JEJICH ŘÍZENÍ Studijní texty
PROCESNÍ KALIBRÁTOR M505 (D)
") M505_CZ_1214 PROCESNÍ KALIBRÁTOR M505 (D) Uživatelská příručka 2 Uživatelská příručka v5 Před zapnutím Einschalten Ujistěte se, že zásilka obsahuje neporušený přístroj model M505 včetně návodu k jeho použití.
M505_CZ_1214 PROCESNÍ KALIBRÁTOR M505 (D) Uživatelská příručka 2 Uživatelská příručka v5 Před zapnutím Einschalten Ujistěte se, že zásilka obsahuje neporušený přístroj model M505 včetně návodu k jeho použití.
Paměťové prvky. ITP Technika personálních počítačů. Zdeněk Kotásek Marcela Šimková Pavel Bartoš
 Paměťové prvky ITP Technika personálních počítačů Zdeněk Kotásek Marcela Šimková Pavel Bartoš Vysoké učení technické v Brně, Fakulta informačních technologií v Brně Božetěchova 2, 612 66 Brno Osnova Typy
Paměťové prvky ITP Technika personálních počítačů Zdeněk Kotásek Marcela Šimková Pavel Bartoš Vysoké učení technické v Brně, Fakulta informačních technologií v Brně Božetěchova 2, 612 66 Brno Osnova Typy
Regulátor MaxVU. Stručný návod k použití
 WEST Control Solutions Regulátor MaxVU Stručný návod k použití Informace, obsažené v tomto návodu, podléhají změnám bez předchozího upozornění. Překlad z anglického originálu firmy West Control Solutions.
WEST Control Solutions Regulátor MaxVU Stručný návod k použití Informace, obsažené v tomto návodu, podléhají změnám bez předchozího upozornění. Překlad z anglického originálu firmy West Control Solutions.
Miroslav Flídr Počítačové systémy LS 2006-1/21- Západočeská univerzita v Plzni
 Počítačové systémy Vnitřní paměti Miroslav Flídr Počítačové systémy LS 2006-1/21- Západočeská univerzita v Plzni Hierarchire pamětí Miroslav Flídr Počítačové systémy LS 2006-2/21- Západočeská univerzita
Počítačové systémy Vnitřní paměti Miroslav Flídr Počítačové systémy LS 2006-1/21- Západočeská univerzita v Plzni Hierarchire pamětí Miroslav Flídr Počítačové systémy LS 2006-2/21- Západočeská univerzita
HC-UT 204. Digitální klešťový multimetr
 HC-UT 204 Digitální klešťový multimetr Souhrn Manuál zahrnuje informace o bezpečnosti a výstrahy. Čtěte pozorně relevantní informace a věnujte velkou pozornost upozorněním a poznámkám.! Upozornění: Abyste
HC-UT 204 Digitální klešťový multimetr Souhrn Manuál zahrnuje informace o bezpečnosti a výstrahy. Čtěte pozorně relevantní informace a věnujte velkou pozornost upozorněním a poznámkám.! Upozornění: Abyste
Mikroprocesorový regulátor MRS 04 1xxx
 Mikroprocesorový regulátor MRS 04 1xxx TECHNICKÁ DOKUMENTACE Výrobce: Lomnická 111, 509 01 Nová Paka Česká republika tel./fax: 493 721 414, 493 721 515, 493 721 995 e-mail: apo@apoelmos.cz http://www.apoelmos.cz
Mikroprocesorový regulátor MRS 04 1xxx TECHNICKÁ DOKUMENTACE Výrobce: Lomnická 111, 509 01 Nová Paka Česká republika tel./fax: 493 721 414, 493 721 515, 493 721 995 e-mail: apo@apoelmos.cz http://www.apoelmos.cz
1.1 Schema zapojení pro MODBUS. 1.2 Zapojení desky DMS2 T3 a uživatelských vstupů. Binární vstup A1/N. Binární vstup A1/N. Binární vstup B1/P
 Obsah 1. Úvod 3 1.1 Schema zapojení pro MODBUS 3 1.2 Zapojení desky DMS2 T3 a uživatelských vstupů 3 2. Sběrnice modbus RTU 4 2.1 Základní vlastnosti 4 2.2 Přenos dat 4 2.3 Funkční možnosti (provedení)
Obsah 1. Úvod 3 1.1 Schema zapojení pro MODBUS 3 1.2 Zapojení desky DMS2 T3 a uživatelských vstupů 3 2. Sběrnice modbus RTU 4 2.1 Základní vlastnosti 4 2.2 Přenos dat 4 2.3 Funkční možnosti (provedení)
UNIVERZITA PARDUBICE ÚSTAV ELEKTROTECHNIKY A INFORMATIKY
 UNIVERZITA PARDUBICE ÚSTAV ELEKTROTECHNIKY A INFORMATIKY GERÁTOR SIGNÁLU PŘESNÉHO KMITOČTU BAKALÁŘSKÁ PRÁCE AUTOR PRÁCE: Jan Šafařík VEDOUCÍ PRÁCE: Ing. Josef Marek, CSc. 2007 UNIVERSITY OF PARDUBICE INSTITUTE
UNIVERZITA PARDUBICE ÚSTAV ELEKTROTECHNIKY A INFORMATIKY GERÁTOR SIGNÁLU PŘESNÉHO KMITOČTU BAKALÁŘSKÁ PRÁCE AUTOR PRÁCE: Jan Šafařík VEDOUCÍ PRÁCE: Ing. Josef Marek, CSc. 2007 UNIVERSITY OF PARDUBICE INSTITUTE
PŘEVODNÍK SNÍMAČE SIL NA USB PRO ZOBRAZENÍ V PC DSCUSB. KRÁTKÁ PŘÍRUČKA PRO OBSLUHU A KONFIGURACI Revize červenec 2014
 PŘEVODNÍK SNÍMAČE SIL NA USB PRO ZOBRAZENÍ V PC DSCUSB KRÁTKÁ PŘÍRUČKA PRO OBSLUHU A KONFIGURACI Revize červenec spol. s.r.o. Ostrovačice OBSAH 1 ZÁKLADNÍ INFORMACE... 2 1.1 Parametry převodníku DSCUSB...
PŘEVODNÍK SNÍMAČE SIL NA USB PRO ZOBRAZENÍ V PC DSCUSB KRÁTKÁ PŘÍRUČKA PRO OBSLUHU A KONFIGURACI Revize červenec spol. s.r.o. Ostrovačice OBSAH 1 ZÁKLADNÍ INFORMACE... 2 1.1 Parametry převodníku DSCUSB...
v Praze Senzorové systémy Sledování polohy slunce na obloze Ondřej Drbal 5. ročník, stud. sk. 9
 České vysoké učení technické v Praze Senzorové systémy Sledování polohy slunce na obloze Ondřej Drbal 5. ročník, stud. sk. 9 22. ledna 2003 1 Zadání Cílem práce je navrhnout zařízení pro sledování polohy
České vysoké učení technické v Praze Senzorové systémy Sledování polohy slunce na obloze Ondřej Drbal 5. ročník, stud. sk. 9 22. ledna 2003 1 Zadání Cílem práce je navrhnout zařízení pro sledování polohy
Alfanumerické displeje
 Alfanumerické displeje Alfanumerické displeje jsou schopné zobrazovat pouze alfanumerické údaje (tj. písmena, číslice) a případně jednoduché grafické symboly definované v základním rastru znaků. Výhoda
Alfanumerické displeje Alfanumerické displeje jsou schopné zobrazovat pouze alfanumerické údaje (tj. písmena, číslice) a případně jednoduché grafické symboly definované v základním rastru znaků. Výhoda
Meteorologická stanice s vlhkoměrem, bezdrátovým snímačem teploty a rádiem ovládanými hodinami model TE629EL.
 Meteorologická stanice s vlhkoměrem, bezdrátovým snímačem teploty a rádiem ovládanými hodinami model TE629EL. UŽIVATELSKÁ PŘÍRUČKA ÚVOD Blahopřejme k zakoupení meteorologické stanice. Balení obsahuje základní
Meteorologická stanice s vlhkoměrem, bezdrátovým snímačem teploty a rádiem ovládanými hodinami model TE629EL. UŽIVATELSKÁ PŘÍRUČKA ÚVOD Blahopřejme k zakoupení meteorologické stanice. Balení obsahuje základní
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Ukazovací zařízení a klávesnice Uživatelská příručka
 Ukazovací zařízení a klávesnice Uživatelská příručka Copyright 2008 Hewlett-Packard Development Company, L.P. Microsoft a Windows jsou registrované ochranné známky společnosti Microsoft Corporation v USA.
Ukazovací zařízení a klávesnice Uživatelská příručka Copyright 2008 Hewlett-Packard Development Company, L.P. Microsoft a Windows jsou registrované ochranné známky společnosti Microsoft Corporation v USA.
Inteligentní Kontrolér Nabíjení ze Solárních Systémů. Provozní Manuál. Před použitím tohoto výrobku čtěte velmi pozorně provozní manuál.
 1 Inteligentní Kontrolér Nabíjení ze Solárních Systémů Provozní Manuál Před použitím tohoto výrobku čtěte velmi pozorně provozní manuál. 2 Obsah 1. Krátký popis výrobku...... 3 2. Instalace..... 4 3. Provoz.....
1 Inteligentní Kontrolér Nabíjení ze Solárních Systémů Provozní Manuál Před použitím tohoto výrobku čtěte velmi pozorně provozní manuál. 2 Obsah 1. Krátký popis výrobku...... 3 2. Instalace..... 4 3. Provoz.....
Voděodolný tloušťkoměr MG-401 Obsah:
 Voděodolný tloušťkoměr MG-401 Obsah: Návod k obsluze 1. Charakteristika tloušťkoměru MG-401... 1 2. Použitelnost přístroje... 2 3. Vnější vzhled... 2 4. Technické parametry... 4 5. Zapnutí a vypnutí přístroje...
Voděodolný tloušťkoměr MG-401 Obsah: Návod k obsluze 1. Charakteristika tloušťkoměru MG-401... 1 2. Použitelnost přístroje... 2 3. Vnější vzhled... 2 4. Technické parametry... 4 5. Zapnutí a vypnutí přístroje...
Osnova: 1. Klopné obvody 2. Univerzálníobvod 555 3. Oscilátory
 K620ZENT Základy elektroniky Přednáška ř č. 6 Osnova: 1. Klopné obvody 2. Univerzálníobvod 555 3. Oscilátory Bistabilní klopný obvod Po připojení ke zdroji napájecího napětí se obvod ustálí tak, že jeden
K620ZENT Základy elektroniky Přednáška ř č. 6 Osnova: 1. Klopné obvody 2. Univerzálníobvod 555 3. Oscilátory Bistabilní klopný obvod Po připojení ke zdroji napájecího napětí se obvod ustálí tak, že jeden
Elektronická laserová harfa
 Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Elektronická laserová harfa Petr Martinovský Střední průmyslová škola dopravní, a.s. Plzeňská 298/217a, Praha 5 -
Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Elektronická laserová harfa Petr Martinovský Střední průmyslová škola dopravní, a.s. Plzeňská 298/217a, Praha 5 -
Úloha- Systém sběru dat, A4B38NVS, ČVUT - FEL, 2015 1
 Úloha Sběr dat (v. 2015) Výklad pojmu systém sběru dat - Systém sběru dat (Data Acquisition System - DAQ) je možno pro účely této úlohy velmi zjednodušeně popsat jako zařízení, které sbírá a vyhodnocuje
Úloha Sběr dat (v. 2015) Výklad pojmu systém sběru dat - Systém sběru dat (Data Acquisition System - DAQ) je možno pro účely této úlohy velmi zjednodušeně popsat jako zařízení, které sbírá a vyhodnocuje
Elektronický psací stroj
 Elektronický psací stroj Konstrukční změny u elektrického psacího stroje s kulovou hlavicí 1. typový koš je nahrazen kulovou hlavicí. pevný vozík s válcem 3. pohyblivá tisková jednotka 4. nylonová barvící
Elektronický psací stroj Konstrukční změny u elektrického psacího stroje s kulovou hlavicí 1. typový koš je nahrazen kulovou hlavicí. pevný vozík s válcem 3. pohyblivá tisková jednotka 4. nylonová barvící
Ovládací PTZ klávesnice SC-3100 Uživatelský a instalační manuál
 Ovládací PTZ klávesnice SC-3100 Uživatelský a instalační manuál Ovládací klávesnice SC-3100 je určena pro ovládání PTZ zařízení, obsahuje 28 funkčních kláves, 3D joystick a LCD display. Vlastnosti : Jedna
Ovládací PTZ klávesnice SC-3100 Uživatelský a instalační manuál Ovládací klávesnice SC-3100 je určena pro ovládání PTZ zařízení, obsahuje 28 funkčních kláves, 3D joystick a LCD display. Vlastnosti : Jedna
3. REALIZACE KOMBINAČNÍCH LOGICKÝCH FUNKCÍ
 3. REALIZACE KOMBINAČNÍCH LOGICKÝCH FUNKCÍ Realizace kombinační logické funkce = sestavení zapojení obvodu, který ze vstupních proměnných vytvoří výstupní proměnné v souhlasu se zadanou logickou funkcí.
3. REALIZACE KOMBINAČNÍCH LOGICKÝCH FUNKCÍ Realizace kombinační logické funkce = sestavení zapojení obvodu, který ze vstupních proměnných vytvoří výstupní proměnné v souhlasu se zadanou logickou funkcí.
Hardwarová realizace konečných automatů
 BI-AAG - Automaty a gramatiky Katedra teoretické informatiky ČVUT FIT 11.1.21 Co potřebujeme Úvod Potřebujeme: zakódovat vstupní abecedu, zakódovat stavy automatu, pamatovat si současný stav, realizovat
BI-AAG - Automaty a gramatiky Katedra teoretické informatiky ČVUT FIT 11.1.21 Co potřebujeme Úvod Potřebujeme: zakódovat vstupní abecedu, zakódovat stavy automatu, pamatovat si současný stav, realizovat
Měnič pro obloukové svařování řízený signálovým procesorem
 Měnič pro obloukové svařování řízený signálovým procesorem Ing. Petr Hapal Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, Ústav výkonové elektroniky, Technická 8, 612
Měnič pro obloukové svařování řízený signálovým procesorem Ing. Petr Hapal Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, Ústav výkonové elektroniky, Technická 8, 612
ŘÍDÍCÍ SYSTÉM CAREL ARIA
 ŘÍDÍCÍ SYSTÉM CAREL ARIA ROZMĚRY TERMINÁLU CLOCK - Hodiny SET Změna MODE Mód FAN Ventilátor HOLD Ulož RESUME - Neakceptuj Strana 1 z 1 UŽIVATELSKÉ ROZHRANÍ Programovatelná postranní tlačítka LCD Displej
ŘÍDÍCÍ SYSTÉM CAREL ARIA ROZMĚRY TERMINÁLU CLOCK - Hodiny SET Změna MODE Mód FAN Ventilátor HOLD Ulož RESUME - Neakceptuj Strana 1 z 1 UŽIVATELSKÉ ROZHRANÍ Programovatelná postranní tlačítka LCD Displej
EMJ-01 odmagnetovací jednotka
 EMJ-01 odmagnetovací jednotka 1. Parametry - Vstupní napájecí napětí 230VAC, pojistka F1A nad přívodní vývodkou. - Pojistky F1.6A pro magnetku a F400mA chránící modul DM2.3E. - Prosvětlený zelený vypínač
EMJ-01 odmagnetovací jednotka 1. Parametry - Vstupní napájecí napětí 230VAC, pojistka F1A nad přívodní vývodkou. - Pojistky F1.6A pro magnetku a F400mA chránící modul DM2.3E. - Prosvětlený zelený vypínač
PX257 RELAY NÁVOD K OBSLUZE
 PX257 Tranzistorový spínač osvětlení PX257 OC Reléový spínač osvětlení PX257 RELAY NÁVOD K OBSLUZE 1. POPIS PX257 slouží k zapínání/vypínání scénického a architektonického osvětlení. Je ovládán protokolem
PX257 Tranzistorový spínač osvětlení PX257 OC Reléový spínač osvětlení PX257 RELAY NÁVOD K OBSLUZE 1. POPIS PX257 slouží k zapínání/vypínání scénického a architektonického osvětlení. Je ovládán protokolem
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 11. října 2007 1 Definice Historie Charakteristiky 2 MCU (microcontroller unit) ATmega8 Programování Blikání LEDkou 3 Kdo s kým Seriový port (UART)
md at robotika.cz http://robotika.cz/guide/umor07/cs 11. října 2007 1 Definice Historie Charakteristiky 2 MCU (microcontroller unit) ATmega8 Programování Blikání LEDkou 3 Kdo s kým Seriový port (UART)
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Zapisovač nemá síťový vypínač a zapne se připojením síťové šnůry na zdroj napájení.
 RD 1700 zapisovač 6.2 Zapnutí napájení a stav zapisovače 6.3 Tisk zkušebního obrazce 6.4 Činnost v normálním módu 7.1 Nastavení a kontrola parametrů 7.2 Přehled postupu nastavení parametrů 7.3 Nastavení
RD 1700 zapisovač 6.2 Zapnutí napájení a stav zapisovače 6.3 Tisk zkušebního obrazce 6.4 Činnost v normálním módu 7.1 Nastavení a kontrola parametrů 7.2 Přehled postupu nastavení parametrů 7.3 Nastavení
PŘEVODNÍK T4111. Programovatelný převodník teploty z čidla Pt1000 na proudovou smyčku 4-20 ma. Návod k použití
 PŘEVODNÍK T4111 Programovatelný převodník teploty z čidla Pt1000 na proudovou smyčku 4-20 ma Návod k použití Návod na použití převodníku T4111 Převodník je určen pro měření teploty ve C nebo F pomocí externí
PŘEVODNÍK T4111 Programovatelný převodník teploty z čidla Pt1000 na proudovou smyčku 4-20 ma Návod k použití Návod na použití převodníku T4111 Převodník je určen pro měření teploty ve C nebo F pomocí externí
Vánoční hvězda 2. Publikované: , Kategória: Blikače a optika.
 Vánoční hvězda 2 Publikované: 10.12.2015, Kategória: Blikače a optika www.svetelektro.com Blíží se vánoce a tak by se hodila nějaká vánoční ozdoba do okna. Chtěl jsem vymyslet něco, s čím se zabavím na
Vánoční hvězda 2 Publikované: 10.12.2015, Kategória: Blikače a optika www.svetelektro.com Blíží se vánoce a tak by se hodila nějaká vánoční ozdoba do okna. Chtěl jsem vymyslet něco, s čím se zabavím na
Multimetr: METEX M386OD (použití jako voltmetr V) METEX M389OD (použití jako voltmetr V nebo ampérmetr A)
 METEX M389OD (použití jako voltmetr V nebo ampérmetr A)") 2.10 Logické Obvody 2.10.1 Úkol měření: 1. Na hradle NAND změřte tyto charakteristiky: Převodní charakteristiku Vstupní charakteristiku Výstupní charakteristiku Jednotlivá zapojení nakreslete do protokolu
2.10 Logické Obvody 2.10.1 Úkol měření: 1. Na hradle NAND změřte tyto charakteristiky: Převodní charakteristiku Vstupní charakteristiku Výstupní charakteristiku Jednotlivá zapojení nakreslete do protokolu
Příloha č. 1. Prototyp mikroprocesorově řízeného žíhacího zdroje s vysokou spolehlivostí multiprocesů využívající moderních polovodičových prvků
 Příloha č. 1 Prototyp mikroprocesorově řízeného žíhacího zdroje s vysokou spolehlivostí multiprocesů využívající moderních polovodičových prvků (popis jednotlivých bloků) Úvod Žíhací zdroj slouží pro řízené
Příloha č. 1 Prototyp mikroprocesorově řízeného žíhacího zdroje s vysokou spolehlivostí multiprocesů využívající moderních polovodičových prvků (popis jednotlivých bloků) Úvod Žíhací zdroj slouží pro řízené
Programovatelný snímač teploty s výstupem 4-20 ma Návod k použití
 SNÍMAČ T0110 Programovatelný snímač teploty s výstupem 4-20 ma Návod k použití Návod na použití snímače T0110 Snímač je určen pro měření okolní teploty. Měřicí senzor teploty je neodnímatelnou součástí
SNÍMAČ T0110 Programovatelný snímač teploty s výstupem 4-20 ma Návod k použití Návod na použití snímače T0110 Snímač je určen pro měření okolní teploty. Měřicí senzor teploty je neodnímatelnou součástí
RC-300. U ivatelská pøíruèka. Instalaèní firma: Servisní telefon: Datum Počet stran Číslo dokumentu 11/2003 6 PU-RC-3-01-C
 RC-300 U ivatelská pøíruèka Instalaèní firma: Servisní telefon: Datum Počet stran Číslo dokumentu 11/2003 6 PU-RC-3-01-C 2 RC-300 1. Bezpečnostní pokyny 1.1 Účel příručky Tato příručka je určena pro koncového
RC-300 U ivatelská pøíruèka Instalaèní firma: Servisní telefon: Datum Počet stran Číslo dokumentu 11/2003 6 PU-RC-3-01-C 2 RC-300 1. Bezpečnostní pokyny 1.1 Účel příručky Tato příručka je určena pro koncového
Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]
![Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]](/thumbs/35/17243672.jpg "Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]") 2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
Využití STM32 pro studentské projekty
 Středoškolská technika 2018 Setkání a prezentace prací středoškolských studentů na ČVUT Využití STM32 pro studentské projekty Pavel Váňa, Marek Pilař, Martin Novák Střední průmyslová škola elektrotechnická
Středoškolská technika 2018 Setkání a prezentace prací středoškolských studentů na ČVUT Využití STM32 pro studentské projekty Pavel Váňa, Marek Pilař, Martin Novák Střední průmyslová škola elektrotechnická
Měření kmitočtu a tvaru signálů pomocí osciloskopu
 Měření kmitočtu a tvaru signálů pomocí osciloskopu Osciloskop nebo také řidčeji oscilograf zobrazuje na stínítku obrazovky nebo LC displeji průběhy připojených elektrických signálů. Speciální konfigurace
Měření kmitočtu a tvaru signálů pomocí osciloskopu Osciloskop nebo také řidčeji oscilograf zobrazuje na stínítku obrazovky nebo LC displeji průběhy připojených elektrických signálů. Speciální konfigurace
4.2 Paměti PROM - 87 - NiCr. NiCr. Obr.140 Proudy v naprogramovaném stavu buňky. Obr.141 Princip PROM. ADRESOVÝ DEKODÉR n / 1 z 2 n
 Vážení zákazníci, dovolujeme si Vás upozornit, že na tuto ukázku knihy se vztahují autorská práva, tzv. copyright. To znamená, že ukázka má sloužit výhradnì pro osobní potøebu potenciálního kupujícího
Vážení zákazníci, dovolujeme si Vás upozornit, že na tuto ukázku knihy se vztahují autorská práva, tzv. copyright. To znamená, že ukázka má sloužit výhradnì pro osobní potøebu potenciálního kupujícího
1. Programování PLC. Programovatelné automaty II - 1 -
 Programovatelné automaty II - 1-1. Programování PLC Centrální jednotka Poskytuje programovatelnému automatu inteligenci. Realizuje soubor instrukcí a systémových služeb, zajišťuje i základní komunikační
Programovatelné automaty II - 1-1. Programování PLC Centrální jednotka Poskytuje programovatelnému automatu inteligenci. Realizuje soubor instrukcí a systémových služeb, zajišťuje i základní komunikační
8. Operaèní zesilovaèe
 zl_e_new.qxd.4.005 0:34 StrÆnka 80 80 Elektronika souèástky a obvody, principy a pøíklady 8. Operaèní zesilovaèe Operaèní zesilovaèe jsou dnes nejvíce rozšíøenou skupinou analogových obvodù. Jedná se o
zl_e_new.qxd.4.005 0:34 StrÆnka 80 80 Elektronika souèástky a obvody, principy a pøíklady 8. Operaèní zesilovaèe Operaèní zesilovaèe jsou dnes nejvíce rozšíøenou skupinou analogových obvodù. Jedná se o
Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram. III / 2 = Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Škola Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Název sady Téma Anotace Autor Střední průmyslová škola a Vyšší odborná škola, Hrabákova 271, Příbram CZ.1.07/1.5.00/34.0556
Obsah. Zobrazovací a ovládací prvky na čelním panelu. Účel použití. Elektrické zapojení. Obr. 5.2-1: Analogový vstupní modul 07 AI 91
 5. Analogový vstupní modul 07 AI 91 8 vstupů, konfigurovatelných pro teplotní senzory nebo jako proudové nebo napěťové vstupy, napájení 4 V DC, CS31 - linie 1 1 3 4 Obr. 5.-1: Analogový vstupní modul 07
5. Analogový vstupní modul 07 AI 91 8 vstupů, konfigurovatelných pro teplotní senzory nebo jako proudové nebo napěťové vstupy, napájení 4 V DC, CS31 - linie 1 1 3 4 Obr. 5.-1: Analogový vstupní modul 07
VY_32_INOVACE_ENI_2.MA_04_Zesilovače a Oscilátory
 Číslo projektu Číslo materiálu CZ..07/.5.00/34.058 VY_3_INOVACE_ENI_.MA_04_Zesilovače a Oscilátory Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
Číslo projektu Číslo materiálu CZ..07/.5.00/34.058 VY_3_INOVACE_ENI_.MA_04_Zesilovače a Oscilátory Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
WLS 909-433 používá tři baterie typu A-76 a WLS 919-433 používá dvě lithiové baterie CR2032.
 Kapitola 1: Úvod 1.1 Specifikace a vlastnosti Proudový odběr: 50mA (v klidu) a maximálně 200mA (oba PGM výstupy aktivovány) Frekvence: 433MHz Přijímač přijímá signál až z 8 bezdrátových ovladačů Anténa:
Kapitola 1: Úvod 1.1 Specifikace a vlastnosti Proudový odběr: 50mA (v klidu) a maximálně 200mA (oba PGM výstupy aktivovány) Frekvence: 433MHz Přijímač přijímá signál až z 8 bezdrátových ovladačů Anténa:
KS 40-1 pro hořáky Speciální regulátor pro průmyslové hořáky
 PMA a Company of WEST Control Solutions KS 40-1 pro hořáky Speciální regulátor pro průmyslové hořáky Čelní komunikační BluePort a BlueControl software Manažer údržby a seznam poruch Modulační, dvoustupňová
PMA a Company of WEST Control Solutions KS 40-1 pro hořáky Speciální regulátor pro průmyslové hořáky Čelní komunikační BluePort a BlueControl software Manažer údržby a seznam poruch Modulační, dvoustupňová
Druhá generace palivoměru LUN 5275 pro letoun EV-55
 Druhá generace palivoměru LUN 5275 pro letoun EV-55 The second generation of the fuel gauge measuring system LUN 5275 for the EV-55 airplane Ing. Martin Moštěk, Ph.D. MESIT přístroje spol. s r. o., email:
Druhá generace palivoměru LUN 5275 pro letoun EV-55 The second generation of the fuel gauge measuring system LUN 5275 for the EV-55 airplane Ing. Martin Moštěk, Ph.D. MESIT přístroje spol. s r. o., email:
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ ŘÍZENÍ KAMEROVÉHO SLIDERU BAKALÁŘSKÁ PRÁCE AUTOR PRÁCE VEDOUCÍ PRÁCE DAVID RAJNOCH. Ing. ROMAN MEGO
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
Laboratorní zdroj - 1. část
 Laboratorní zdroj - 1. část Publikované: 12.02.2016, Kategória: Silové časti www.svetelektro.com V sérii článků, se spolu s kolegou Michalem OK2HAZ, budeme věnovat popisu naší práce při stavbě laboratorního
Laboratorní zdroj - 1. část Publikované: 12.02.2016, Kategória: Silové časti www.svetelektro.com V sérii článků, se spolu s kolegou Michalem OK2HAZ, budeme věnovat popisu naší práce při stavbě laboratorního
Střední odborná škola a Střední odborné učiliště, Dubno Ing. Miroslav Krýdl Tematická oblast ELEKTRONIKA
 Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_17_Číslicový obvod Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická oblast
Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_17_Číslicový obvod Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická oblast
3.4 Ověření Thomsonova vztahu sériový obvod RLC
 3.4 Ověření Thomsonova vztahu sériový obvod RLC Online: http://www.sclpx.eu/lab3r.php?exp=9 Tímto experimentem ověřujeme známý vztah (3.4.1) pro frekvenci LC oscilátoru, který platí jak pro sériové, tak
3.4 Ověření Thomsonova vztahu sériový obvod RLC Online: http://www.sclpx.eu/lab3r.php?exp=9 Tímto experimentem ověřujeme známý vztah (3.4.1) pro frekvenci LC oscilátoru, který platí jak pro sériové, tak
HypEd4 Uživatelská příručka 2004 HYPEL
 HypEd4 Uživatelská příručka I HypEd4 - Uživatelská příručka Obsah Kapitola I Vítejte 6 1 Použití nápovědy... 6 2 Co je nového... v programu HypEd 4 6 3 Získání další odborné... pomoci 6 Kapitola II Instalace,
HypEd4 Uživatelská příručka I HypEd4 - Uživatelská příručka Obsah Kapitola I Vítejte 6 1 Použití nápovědy... 6 2 Co je nového... v programu HypEd 4 6 3 Získání další odborné... pomoci 6 Kapitola II Instalace,
Téma: Arkanoid. X36SOJ Strojově orientované jazyky Semestrální práce. Vypracoval: Marek Handl Datum: červen 2006
 Vypracoval: Marek Handl Datum: červen 2006 X36SOJ Strojově orientované jazyky Semestrální práce Téma: Arkanoid Úvod Program je verzí klasické hry Arkanoid. Na herní ploše jsou rozloženy kostičky, které
Vypracoval: Marek Handl Datum: červen 2006 X36SOJ Strojově orientované jazyky Semestrální práce Téma: Arkanoid Úvod Program je verzí klasické hry Arkanoid. Na herní ploše jsou rozloženy kostičky, které
Jízda po čáře pro reklamní robot
 Jízda po čáře pro reklamní robot Předmět: BROB Vypracoval: Michal Bílek ID:125369 Datum: 25.4.2012 Zadání: Implementujte modul do podvozku robotu, který umožňuje jízdu robotu po předem definované trase.
Jízda po čáře pro reklamní robot Předmět: BROB Vypracoval: Michal Bílek ID:125369 Datum: 25.4.2012 Zadání: Implementujte modul do podvozku robotu, který umožňuje jízdu robotu po předem definované trase.
Tepelná čerpadla HP. tepelná čerpadla. Návod k obsluze a instalaci 03. 2013. pro verzi software. 01.07.xx
 tepelná čerpadla Tepelná čerpadla HP Návod k obsluze a instalaci 03. 2013 verze 01.07.00 pro verzi software 01.07.xx PZP HEATING a.s., Dobré 149, 517 93 Dobré Tel.: +420 494 664 203, Fax: +420 494 629
tepelná čerpadla Tepelná čerpadla HP Návod k obsluze a instalaci 03. 2013 verze 01.07.00 pro verzi software 01.07.xx PZP HEATING a.s., Dobré 149, 517 93 Dobré Tel.: +420 494 664 203, Fax: +420 494 629
Míchačka karet Shuffle King. Obsah balení:
 Míchačka karet Shuffle King Obsah balení: 1x Míchačka karet 1x Napájecí adaptér 230/24 V 1x Úchytný plech (pro tenké nebo silné čalounění stolu) 1x Krycí panel (pro tenké nebo silné čalounění stolu) 1x
Míchačka karet Shuffle King Obsah balení: 1x Míchačka karet 1x Napájecí adaptér 230/24 V 1x Úchytný plech (pro tenké nebo silné čalounění stolu) 1x Krycí panel (pro tenké nebo silné čalounění stolu) 1x