SIFT: Scale Invariant Feature Transform Automatické nalezení korespondencí mezi dvojicí obrázků
|
|
|
- Luboš Bárta
- před 8 lety
- Počet zobrazení:
Transkript
1 SIFT: Scale Invariant Feature Transform Automatické nalezení korespondencí mezi dvojicí obrázků Přílohy (videa, zdrojáky, ) ke stažení na:
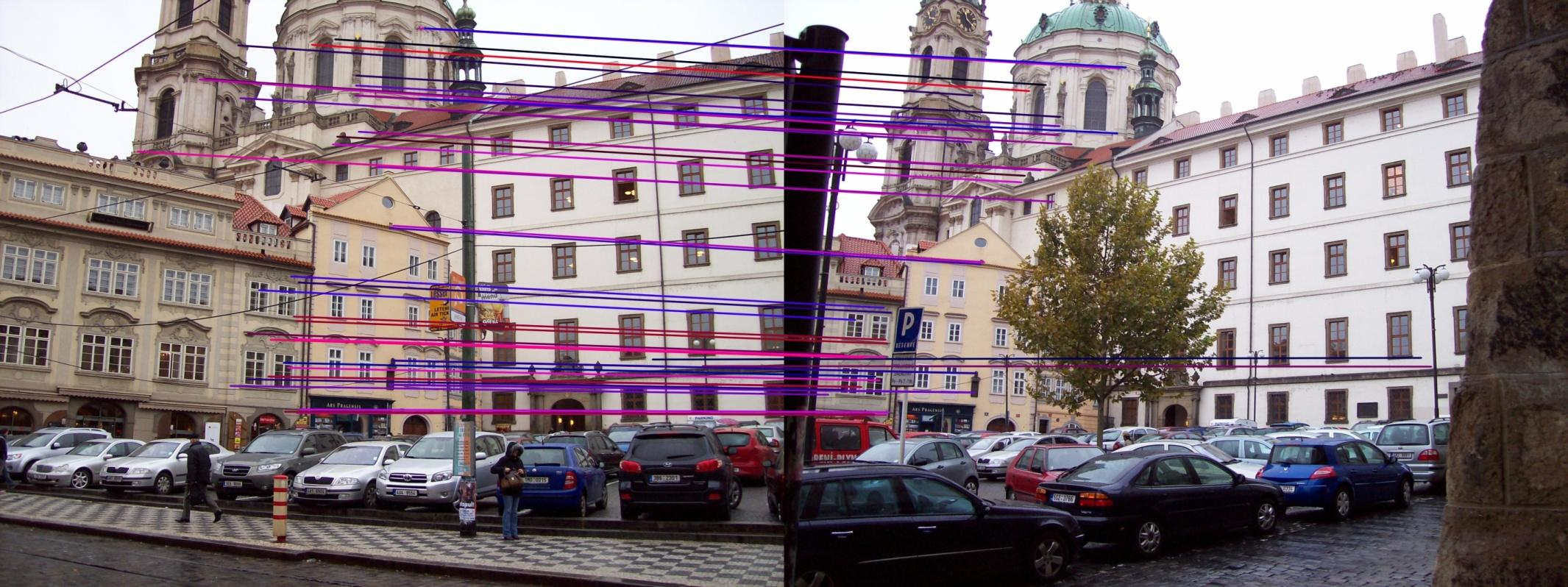
2 Korespondence mezi obrázky
3 Korespondence mezi obrázky
4 K čemu je to dobré? Motivace na začátek

5 Panorama stitching (a)

6 Panorama stitching (b)
7 Automatická rekonstrukce 3D scény Ukázka
8 Jak najít korespondence? Nejprve na obrázku nalezneme významná místa features (body zájmu)
9 Deskriptory Každou feature popíšeme deskriptorem: vektorem 128 integerů Deskriptory jsou invariantní vůči následujícím operacím s obrazem: zvětšení/zmenšení, posun, 2d rotace, šum, změna kontrastu, jasu, osvětlení částečně invariantní vůči prostorové změně úhlu pohledu Stejné body na dalších obrázcích tedy budou mít stejné (nebo velmi podobné) deskriptory
10 Schéma algoritmu 1. Vybereme velké množství bodů kandidátů 2. Z této množiny odfiltrujeme nestabilní features (nekontrastní, na hranách, ) 3. Vypočítáme deskriptory 4. Vše provedeme v různých měřítcích (scale space) původního obrázku a všechny features hodíme na jednu hromadu
11 Pozorování: vezmeme obrázek
12 Gaussovské rozostření poprvé

13 Gaussovské rozostření podruhé
14 Odečteme je od sebe

15 Odečteme je od sebe
16 Co se stalo? Zajímat nás budou lokální extrémy v rozdílovém obrázku (na předchozím obrázku je zobrazený v absolutní hodnotě) Černé (= nulový rozdíl) jsou hrany a velké homogenní oblasti ty nás nezajímají Bílé (= velký rozdíl) jsou oblasti vedle hran a středy malých kruhů
17 Proč se to stalo? Ukážeme si to na příkladu jednorozměrné funkce ( 1D obrázek ):
18 Pokračujeme s funkcí Funkci rozostříme podobně jako jsme to provedli s obrázkem:
19 Rozostření podruhé Zopakujeme konvoluci:
20 odečteme funkce od sebe výsledek
21 původní funkce 2. derivace této funkce rozdíl z minulého slidu
22 Závěr pozorování Rozdíl dvou gaussovsky rozostřených obrázků je aproximací druhé derivace obrázku (přesněji Laplaciánu) Algoritmus na začátku vybere lokální extrémy v takovýchto rozdílových obrázcích
23 Sestavíme scale space
24 Sestavíme scale space
25 Sestavíme scale space
26 Sestavíme scale space
27 Sestavíme scale space
28 Sestavíme scale space

29 Odečteme sousední obrázky

30 Vybereme lokální extrémy V rozdílových obrázcích vybereme lokální extrémy pixely s hodnotou větší (menší) než všichni sousedé Porovnáváme ovšem i s pixely na 3x3 okolí na stejném místě v sousedních obrázcích ve scale space
31 Ukázka: lokální extrémy ve scale space

32 Proložení kvadratickou funkcí (a) Pro každý lokální extrém vezmeme jeho 3 3 okolí a představíme si ho jako funkci R 2 R
33 Proložení kvadratickou funkcí (b) Těmito hodnotami proložíme trojrozměrnou kvadratickou funkci:
34 Subpixelová přesnost Najdeme minimum/maximum této funkce a tak zjistíme polohu feature se subpixelovou přesností

35 Filtrování features Podle tvaru kvadratické funkce odstraníme nestabilní features: s nedostatečným kontrastem nebo ležící podél hran
36 Znovu: lokální extrémy ve scale space
37 Odstranění nekontrastních features
38 Odstranění features na hranách

39 Odstranění features na hranách
40 Odstranění features na hranách
41 Orientace a velikost Bodům zájmu přiřadíme orientaci a velikost V rozostřeném obrázku vypočítáme 1. derivaci v místě feature (ve směrech os x a y: d x, d y ) Velikost: L = sqrt(d x2 + d y2 ) Orientace: α = arctan(d y /d x )
42 Orientace a velikost Velikost feature: L = sqrt(d x2 + d y2 ) Orientace feature: α = arctan(d y /d x )
43 Deskriptor Chceme vhodně popsat okolí feature (o velikosti L) Výpočet deskriptoru budeme provádět relativně vzhledem k orientaci feature (α) Tím dosáhneme invariance vzhledem k rotaci obrázku

44 Deskriptor Deskriptor je typicky 128-rozměrný vektor vypočítaný na základě gradientů v okolí feature To vychází z biologického modelu rozpoznávání objektů Image licensed under GNU FDL

45 Deskriptor V okolí feature vypočítáme gradienty Deskriptor je histogramem těchto gradientů D. Lowe
46 Feature matching Každý bod zájmu máme popsaný vektorem Na druhém obrázku najdeme bod zájmu, který má tento vektor co nejpodobnější Podobnost vektorů: použijeme běžnou eukleidovskou metriku Feature space outlier rejection Zrychlení: PDS, kd-strom
47 Další aplikace Zdrojáky využívají knihovnu OpenCV a opensource implementaci SIFTů (viz odkazy na literaturu).
")
48 Rozpoznávání objektů Hledání korespondencí oproti celé množině fotografií (databáze) Unknown

49 matching.c, pano.c
50 Kalibrace kamer Kalibrace snímků videa či fotografií U videa ale fungují i primitivnější metody Přidávání renderovaných objektů do videa, modelování podle fotografií Nicméně: SIFT není zcela afině invariantní, hledání korespondencí mezi fotografiemi s velmi odlišnými úhly pohledu je stále problém
51 Literatura Hlavní článek: David G. Lowe: Distinctive image features from scale-invariant keypoints, International Journal of Computer Vision, 60, 2 (2004), pp
52 Další informace Filtrování chybných korespondencí (RANSAC, guided matching) a mnoho dalšího: R. I. Hartley, A. Zisserman, Multiple View Geometry in Computer Vision, 2nd Edition, Cambridge University Pr., Automatická rekonstrukce 3D scén pomocí SIFTů: Brown, Lowe, Unsupervised 3D Object Recognition and Reconstruction in Unordered Datasets Jiný algoritmus (stabilnější při změně polohy pozorovatele): J. Matas, O. Chum, M. Urban, T. Pajdla, Robust Wide Baseline Stereo from Maximally Stable Extremal Regions, British Machine Vision Conference, 2002.
53 Odkazy Open source implementace: Seznam na: php/known_implementations_of_sift Zejména: Komerční software (kalibrace kamer):
54 Děkuji za pozornost Licensed under Creative Commons BY 3.0
Cvičení 11: RANSAC Tomáš Sixta 23. listopadu 2012
 Cvičení 11: RANSAC Tomáš Sixta 23. listopadu 2012 1 Úvod V tomto cvičení se naučíte pracovat s algoritmem RANSAC pro nalezení transformace mezi dvěma množinami bodových korespondencí. Mějme dva obrázky
Cvičení 11: RANSAC Tomáš Sixta 23. listopadu 2012 1 Úvod V tomto cvičení se naučíte pracovat s algoritmem RANSAC pro nalezení transformace mezi dvěma množinami bodových korespondencí. Mějme dva obrázky
BRNO UNIVERSITY OF TECHNOLOGY FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND MULTIMEDIA BACHELOR S THESIS AUTHOR
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Roman Juránek. Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 30
 Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
REKONSTRUKCE 3D OBJEKTU Z OBRAZOVÝCH DAT
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
2 Rekonstrukce ze dvou kalibrovaných pohledů
 24. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE ŠÁRKA VORÁČOVÁ APLIKACE EPIPOLÁRNÍ GEOMETRIE Abstrakt Epipolární geometrie je geometrií dvou středových promítání. Je teoretickým základem pro určení vztahu
24. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE ŠÁRKA VORÁČOVÁ APLIKACE EPIPOLÁRNÍ GEOMETRIE Abstrakt Epipolární geometrie je geometrií dvou středových promítání. Je teoretickým základem pro určení vztahu
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015
 LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015 1 LBP 1 LBP Tato metoda, publikovaná roku 1996, byla vyvinuta za účelem sestrojení jednoduchého a výpočetně rychlého nástroje pro
LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015 1 LBP 1 LBP Tato metoda, publikovaná roku 1996, byla vyvinuta za účelem sestrojení jednoduchého a výpočetně rychlého nástroje pro
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING ÚSTAV KONSTRUOVÁNÍ INSTITUTE OF MACHINE AND INDUSTRIAL DESIGN REKONSTRUKCE 3D
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING ÚSTAV KONSTRUOVÁNÍ INSTITUTE OF MACHINE AND INDUSTRIAL DESIGN REKONSTRUKCE 3D
Odečítání pozadí a sledování lidí z nehybné kamery. Ondřej Šerý
 Odečítání pozadí a sledování lidí z nehybné kamery Ondřej Šerý Plán Motivace a popis úlohy Rozdělení úlohy na tři části Detekce pohybu Detekce objektů Sledování objektů Rozbor každé z částí a nástin několika
Odečítání pozadí a sledování lidí z nehybné kamery Ondřej Šerý Plán Motivace a popis úlohy Rozdělení úlohy na tři části Detekce pohybu Detekce objektů Sledování objektů Rozbor každé z částí a nástin několika
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
SLEDOVÁNÍ OBJEKTU VE VIDEOSEKVENCI
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
NAIL072 ROZPOZNÁVÁNÍ VZORŮ
 NAIL072 ROZPOZNÁVÁNÍ VZORŮ RNDr. Jana Štanclová, Ph.D. jana.stanclova@ruk.cuni.cz www.cuni.cz/~stancloj LS Zk 2/0 OSNOVA 1. Úvod do rozpoznávání vzorů 2. Bayesovská teorie rozpoznávání 3. Diskriminační
NAIL072 ROZPOZNÁVÁNÍ VZORŮ RNDr. Jana Štanclová, Ph.D. jana.stanclova@ruk.cuni.cz www.cuni.cz/~stancloj LS Zk 2/0 OSNOVA 1. Úvod do rozpoznávání vzorů 2. Bayesovská teorie rozpoznávání 3. Diskriminační
REKONSTRUKCE 3D SCÉNY Z OBRAZOVÝCH DAT
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY SEMESTRÁLNÍ PRÁCE - ROBOTIKA M05 Registrace snímků z RGB kamer AUTOŘI PRÁCE FILIP
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY SEMESTRÁLNÍ PRÁCE - ROBOTIKA M05 Registrace snímků z RGB kamer AUTOŘI PRÁCE FILIP
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012
 Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012 Metoda nejmenších čtverců Matematicko-statistická metoda používaná zejména při zpracování nepřesných dat (typicky experimentálních empirických
Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012 Metoda nejmenších čtverců Matematicko-statistická metoda používaná zejména při zpracování nepřesných dat (typicky experimentálních empirických
LOKALIZACE MOBILNÍHO ROBOTA V PROSTŘEDÍ LOCALISATION OF MOBILE ROBOT IN THE ENVIRONMENT
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
aneb jiný úhel pohledu na prvák
 Účelná matematika aneb jiný úhel pohledu na prvák Jan Hejtmánek FEL, ČVUT v Praze 24. června 2015 Jan Hejtmánek (FEL, ČVUT v Praze) Technokrati 2015 24. června 2015 1 / 18 Outline 1 Motivace 2 Proč tolik
Účelná matematika aneb jiný úhel pohledu na prvák Jan Hejtmánek FEL, ČVUT v Praze 24. června 2015 Jan Hejtmánek (FEL, ČVUT v Praze) Technokrati 2015 24. června 2015 1 / 18 Outline 1 Motivace 2 Proč tolik
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
FAKULTA INFORMAČNÍCH TECHNOLOGIÍ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 39
 Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 39
Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 39
transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]
![transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]](/thumbs/88/115112143.jpg "transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]") [1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
[1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů
 obrazů") ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
Zpracování digitalizovaného obrazu (ZDO) - Segmentace II
 - Segmentace II") Zpracování digitalizovaného obrazu (ZDO) - Segmentace II Další metody segmentace Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného
Zpracování digitalizovaného obrazu (ZDO) - Segmentace II Další metody segmentace Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY
 TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
FAKULTA INFORMAČNÍCH TECHNOLOGIÍ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Projekt do předmětu ZPO
 Projekt do předmětu ZPO Sledování ruky pomocí aktivních kontur 13. května 2014 Autoři: Pavlík Vít, xpavli62@stud.fit.vutbr.cz Žerdík Jan, xzerdi00@stud.fit.vutbr.cz Doležal Pavel, xdolez08@stud.fit.vutbr.cz
Projekt do předmětu ZPO Sledování ruky pomocí aktivních kontur 13. května 2014 Autoři: Pavlík Vít, xpavli62@stud.fit.vutbr.cz Žerdík Jan, xzerdi00@stud.fit.vutbr.cz Doležal Pavel, xdolez08@stud.fit.vutbr.cz
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Vyhledávání. doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava. Prezentace ke dni 21.
 Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
Aplikace obrazové fúze pro hledání vad
 Marek Vajgl, Irina Perfilieva, Petr Hurtík, Petra Hoďáková Národní superpočítačové centrum IT4Innovations Divize Ostravské univerzity Ústav pro výzkum a aplikaci fuzzy modelování Ostrava, Česká republika
Marek Vajgl, Irina Perfilieva, Petr Hurtík, Petra Hoďáková Národní superpočítačové centrum IT4Innovations Divize Ostravské univerzity Ústav pro výzkum a aplikaci fuzzy modelování Ostrava, Česká republika
Diskrétní 2D konvoluce
 ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
Minkowského operace. Použití. Světlana Tomiczková. Rozmisťování Robot Motion Planning Offset Optics. Pojmy:
 Minkowského operace Hermann Minkowski Narodil se 22. 6. 1864. Studoval na univerzitách v Berlíně a Königsbergu. Učil na univerzitách v Bonnu, Königsbergu and Zurichu. V Zurichu byl jeho studentem A. Einstein.
Minkowského operace Hermann Minkowski Narodil se 22. 6. 1864. Studoval na univerzitách v Berlíně a Königsbergu. Učil na univerzitách v Bonnu, Königsbergu and Zurichu. V Zurichu byl jeho studentem A. Einstein.
Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu
 - Analýza pohybu") Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu Úvod Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu (ZDO)
Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu Úvod Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu (ZDO)
Hierarchický model. 1995-2013 Josef Pelikán CGG MFF UK Praha. pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16
 Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
PŘI AGILITY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ PETR PALATA BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Nelineární rovnice. Numerické metody 6. května FJFI ČVUT v Praze
 Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
11 Zobrazování objektů 3D grafiky
 11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
Automatické rozpoznávání dopravních značek
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
Problematika disertační práce a současný stav řešení. Ing. Aneta Zatočilová
 Problematika disertační práce a současný stav řešení 2 /12 OBSAH PREZENTACE: Téma dizertační práce Úvod do problematiky Přehled metod Postup řešení Projekty, výuka a další činnost 3 /12 TÉMA DIZERTAČNÍ
Problematika disertační práce a současný stav řešení 2 /12 OBSAH PREZENTACE: Téma dizertační práce Úvod do problematiky Přehled metod Postup řešení Projekty, výuka a další činnost 3 /12 TÉMA DIZERTAČNÍ
Fotoaparát s historickou pamětí
 diplomová práce Fotoaparát s historickou pamětí Bc. Ondřej Kopřiva Leden 2014 Vedoucí: Mgr. Roman Sejkot České vysoké učení technické v Praze Fakulta elektrotechnická, Katedra kybernetiky Poděkování Chtěl
diplomová práce Fotoaparát s historickou pamětí Bc. Ondřej Kopřiva Leden 2014 Vedoucí: Mgr. Roman Sejkot České vysoké učení technické v Praze Fakulta elektrotechnická, Katedra kybernetiky Poděkování Chtěl
Afinní transformace Stručnější verze
 [1] Afinní transformace Stručnější verze je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím body a vektory: afinní prostor využití například v počítačové grafice a)
[1] Afinní transformace Stručnější verze je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím body a vektory: afinní prostor využití například v počítačové grafice a)
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
DUM 14 téma: Barevné korekce fotografie
 DUM 14 téma: Barevné korekce fotografie ze sady: 2 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
DUM 14 téma: Barevné korekce fotografie ze sady: 2 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ
 ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ K. Nováková 1, J. Kukal 1,2 1 Fakulta jaderná a fyzikálně inženýrská, ČVUT v Praze 2 Ústav počítačové a řídicí techniky, VŠCHT Praha
ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ K. Nováková 1, J. Kukal 1,2 1 Fakulta jaderná a fyzikálně inženýrská, ČVUT v Praze 2 Ústav počítačové a řídicí techniky, VŠCHT Praha
Geometrie pro počítačovou grafiku - PGR020
 Geometrie pro počítačovou grafiku - PGR020 Zbyněk Šír Matematický ústav UK Zbyněk Šír (MÚ UK) - Geometrie pro počítačovou grafiku - PGR020 1 / 18 O čem předmět bude Chceme podat teoretický základ nezbytný
Geometrie pro počítačovou grafiku - PGR020 Zbyněk Šír Matematický ústav UK Zbyněk Šír (MÚ UK) - Geometrie pro počítačovou grafiku - PGR020 1 / 18 O čem předmět bude Chceme podat teoretický základ nezbytný
Kybernetika a umělá inteligence, cvičení 10/11
 Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
PROGRAM PRO VÝPOČET PROSTOROVÝCH SOUŘADNIC A TVORBU HLOUBKOVÉ MAPY
 Roč. 70 (2014) Číslo 1 L. Boleček, V. Říčný: Program pro výpočet prostorových souřadnic... 7 PROGRAM PRO VÝPOČET PROSTOROVÝCH SOUŘADNIC A TVORBU HLOUBKOVÉ MAPY Ing. Libor Boleček 1, prof. Ing. Václav Říčný,
Roč. 70 (2014) Číslo 1 L. Boleček, V. Říčný: Program pro výpočet prostorových souřadnic... 7 PROGRAM PRO VÝPOČET PROSTOROVÝCH SOUŘADNIC A TVORBU HLOUBKOVÉ MAPY Ing. Libor Boleček 1, prof. Ing. Václav Říčný,
kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
 Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
Matematika I (KX001) Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0
 Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0") Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů
 Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů Design and implementation of algorithms for adaptive control of stationary robots Marcel Vytečka 1, Karel Zídek 2 Abstrakt Článek
Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů Design and implementation of algorithms for adaptive control of stationary robots Marcel Vytečka 1, Karel Zídek 2 Abstrakt Článek
SCI-FI HUDEBNÍ KNIHOVNA
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Algoritmus sledování objektů pro funkční vzor sledovacího systému
 Algoritmus sledování objektů pro funkční vzor sledovacího systému Technická zpráva - FIT - VG20102015006 2014-04 Ing. Filip Orság, Ph.D. Fakulta informačních technologií, Vysoké učení technické v Brně
Algoritmus sledování objektů pro funkční vzor sledovacího systému Technická zpráva - FIT - VG20102015006 2014-04 Ing. Filip Orság, Ph.D. Fakulta informačních technologií, Vysoké učení technické v Brně
7. Geometrické algoritmy (sepsal Pavel Klavík)
") 7. Geometrické algoritmy (sepsal Pavel Klavík) Ukážeme si několik základních algoritmů na řešení geometrických problémů v rovině. Proč zrovna v rovině? Inu, jednorozměrné problémy bývají triviální a naopak
7. Geometrické algoritmy (sepsal Pavel Klavík) Ukážeme si několik základních algoritmů na řešení geometrických problémů v rovině. Proč zrovna v rovině? Inu, jednorozměrné problémy bývají triviální a naopak
WhyCon: Přesný, rychlý a levný lokalizační systém
 WhyCon: Přesný, rychlý a levný lokalizační systém Tomáš Krajník, Matías Nitsche, Peter Lightbody ČVUT Praha Univ. of Buenos Aires, Argentina Univ. of Lincoln, UK Apr 2018 Krajník, Nitsche http://github.com/gestom/whycon-orig
WhyCon: Přesný, rychlý a levný lokalizační systém Tomáš Krajník, Matías Nitsche, Peter Lightbody ČVUT Praha Univ. of Buenos Aires, Argentina Univ. of Lincoln, UK Apr 2018 Krajník, Nitsche http://github.com/gestom/whycon-orig
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Zpráva o zahraničním pobytu
 CENTER FOR MACHINE PERCEPTION Zpráva o zahraničním pobytu CZECH TECHNICAL UNIVERSITY IN PRAGUE Michal Polic policmic@fel.cvut.cz CTU CMP 2016 08 3. Srpna, 2016 ZPRÁVA O ZAHRANIČNÍM POBYTU ISSN 1213-2365
CENTER FOR MACHINE PERCEPTION Zpráva o zahraničním pobytu CZECH TECHNICAL UNIVERSITY IN PRAGUE Michal Polic policmic@fel.cvut.cz CTU CMP 2016 08 3. Srpna, 2016 ZPRÁVA O ZAHRANIČNÍM POBYTU ISSN 1213-2365
Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 53
 Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 53
Extrakce obrazových příznaků Ing. Aleš Láník, Ing. Jiří Zuzaňák Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 53
Státnice odborné č. 20
 Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
Detekce beztexturových 3D objektů Detection of Textureless 3-D Objects
 VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky Katedra informatiky Detekce beztexturových 3D objektů Detection of Textureless 3-D Objects 2017 Bc. Petra Svobodová Poděkování
VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky Katedra informatiky Detekce beztexturových 3D objektů Detection of Textureless 3-D Objects 2017 Bc. Petra Svobodová Poděkování
Hledání hran. Václav Hlaváč. České vysoké učení technické v Praze
 Hledání hran Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická, katedra kybernetiky
Hledání hran Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická, katedra kybernetiky
Vytěžování znalostí z dat
 Pavel Kordík, Jan Motl (ČVUT FIT) Vytěžování znalostí z dat BI-VZD, 2012, Přednáška 1 1/32 Vytěžování znalostí z dat Pavel Kordík, Jan Motl Department of Computer Systems Faculty of Information Technology
Pavel Kordík, Jan Motl (ČVUT FIT) Vytěžování znalostí z dat BI-VZD, 2012, Přednáška 1 1/32 Vytěžování znalostí z dat Pavel Kordík, Jan Motl Department of Computer Systems Faculty of Information Technology
Jak funguje asymetrické šifrování?
 Jak funguje asymetrické šifrování? Petr Vodstrčil petr.vodstrcil@vsb.cz Katedra aplikované matematiky, Fakulta elektrotechniky a informatiky, Vysoká škola báňská Technická univerzita Ostrava Petr Vodstrčil
Jak funguje asymetrické šifrování? Petr Vodstrčil petr.vodstrcil@vsb.cz Katedra aplikované matematiky, Fakulta elektrotechniky a informatiky, Vysoká škola báňská Technická univerzita Ostrava Petr Vodstrčil
PARCIÁLN LNÍ ROVNICE
 PARCIÁLN LNÍ DIFERENCIÁLN LNÍ ROVNICE VE ZPRACOVÁNÍ OBRAZU Autor práce: Vedoucí práce: Anna Kratochvílová Ing.Tomáš Oberhuber Zadání Najít vhodný matematický model pro segmentaci obrazových dat Navrhnout
PARCIÁLN LNÍ DIFERENCIÁLN LNÍ ROVNICE VE ZPRACOVÁNÍ OBRAZU Autor práce: Vedoucí práce: Anna Kratochvílová Ing.Tomáš Oberhuber Zadání Najít vhodný matematický model pro segmentaci obrazových dat Navrhnout
Odhad parametrů N(µ, σ 2 )
") Odhad parametrů N(µ, σ 2 ) Mějme statistický soubor x 1, x 2,, x n modelovaný jako realizaci náhodného výběru z normálního rozdělení N(µ, σ 2 ) s neznámými parametry µ a σ. Jaký je maximální věrohodný
Odhad parametrů N(µ, σ 2 ) Mějme statistický soubor x 1, x 2,, x n modelovaný jako realizaci náhodného výběru z normálního rozdělení N(µ, σ 2 ) s neznámými parametry µ a σ. Jaký je maximální věrohodný
Panoramatická fotografie
 Panoramatická fotografie Jan Hnízdil xhnij08@vse.cz VŠE Praha Fakulta informatiky a statistiky Panoramatická fotografie p.1/37 Osnova Panoramatická fotografie, jak jí vytvořit, programy na tvorbu panoramatických
Panoramatická fotografie Jan Hnízdil xhnij08@vse.cz VŠE Praha Fakulta informatiky a statistiky Panoramatická fotografie p.1/37 Osnova Panoramatická fotografie, jak jí vytvořit, programy na tvorbu panoramatických
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Image search: kde slova nestačí Petra Budíková, ÚVT a FI MU
 Image search: kde slova nestačí Petra Budíková, ÚVT a FI MU Lidová moudrost pohádek praví, že když chtěl princ požádat o ruku krásnou princeznu, neposlal jí zdvořilou žádost, ale svůj obraz. Na něm princezna
Image search: kde slova nestačí Petra Budíková, ÚVT a FI MU Lidová moudrost pohádek praví, že když chtěl princ požádat o ruku krásnou princeznu, neposlal jí zdvořilou žádost, ale svůj obraz. Na něm princezna
Výpočet sedání kruhového základu sila
 Inženýrský manuál č. 22 Aktualizace 06/2016 Výpočet sedání kruhového základu sila Program: MKP Soubor: Demo_manual_22.gmk Cílem tohoto manuálu je popsat řešení sedání kruhového základu sila pomocí metody
Inženýrský manuál č. 22 Aktualizace 06/2016 Výpočet sedání kruhového základu sila Program: MKP Soubor: Demo_manual_22.gmk Cílem tohoto manuálu je popsat řešení sedání kruhového základu sila pomocí metody
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Popis objektů. Karel Horák. Rozvrh přednášky:
 1 / 41 Popis objektů Karel Horák Rozvrh přednášky: 1. Úvod.. Příznakový vektor. 3. Příznakový prostor. 4. Členění příznaků. 5. Identifikace oblastí. 6. Radiometrické deskriptory. 7. Fotometrické deskriptory.
1 / 41 Popis objektů Karel Horák Rozvrh přednášky: 1. Úvod.. Příznakový vektor. 3. Příznakový prostor. 4. Členění příznaků. 5. Identifikace oblastí. 6. Radiometrické deskriptory. 7. Fotometrické deskriptory.
1 Extrémy funkcí - slovní úlohy
 1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
Hledání hran. Václav Hlaváč. České vysoké učení technické v Praze
 Hledání hran Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac, vaclav.hlavac@cvut.cz
Hledání hran Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac, vaclav.hlavac@cvut.cz
Digitální kartografie 3
 Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
Zpracování digitalizovaného obrazu (ZDO) - Segmentace
 - Segmentace") Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
 http://excel.fit.vutbr.cz Určení azimutu natočení hlavy v záznamu bezpečnostní kamerou Ondřej Blucha* Abstrakt Cílem této práce je vytvořit program, který bude schopen ze vstupního videa určit úhly natočení
http://excel.fit.vutbr.cz Určení azimutu natočení hlavy v záznamu bezpečnostní kamerou Ondřej Blucha* Abstrakt Cílem této práce je vytvořit program, který bude schopen ze vstupního videa určit úhly natočení
PHOTO-ON Profesionální on-line správa fotografií
 PHOTO-ON Profesionální on-line správa fotografií Softwarový produkt PHOTO-ON je především určen k evidenci, zařazování a archivaci statického obrazového materiálu např. fotografie, obrazová dokumentace
PHOTO-ON Profesionální on-line správa fotografií Softwarový produkt PHOTO-ON je především určen k evidenci, zařazování a archivaci statického obrazového materiálu např. fotografie, obrazová dokumentace
Spojitý šum v praxi. Jan Gehr
 Spojitý šum v praxi Jan Gehr Úvod Za použití Unity si ukážeme následující příklady: 1. Jednoduchý příklad z praxe (náhodný spojitý pohyb terče) 2. Ukázka implementace generátoru terénu (podobně jako ve
Spojitý šum v praxi Jan Gehr Úvod Za použití Unity si ukážeme následující příklady: 1. Jednoduchý příklad z praxe (náhodný spojitý pohyb terče) 2. Ukázka implementace generátoru terénu (podobně jako ve
MATEMATIKA V MEDICÍNĚ
 MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
3D REKONSTRUKCE ARCHITEKTURY DAVID SEDLÁČEK
 3D REKONSTRUKCE ARCHITEKTURY DAVID SEDLÁČEK Měření ve fotografii 3D rekonstrukce architektury Simulace osvětlení reálných budov a interiérů Situování budovy do okolí Návrh přestavby části budovy Vygenerování
3D REKONSTRUKCE ARCHITEKTURY DAVID SEDLÁČEK Měření ve fotografii 3D rekonstrukce architektury Simulace osvětlení reálných budov a interiérů Situování budovy do okolí Návrh přestavby části budovy Vygenerování
DUM 15 téma: Filtry v prostředí Gimp
 DUM 15 téma: Filtry v prostředí Gimp ze sady: 2 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
DUM 15 téma: Filtry v prostředí Gimp ze sady: 2 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
Value at Risk. Karolína Maňáková
 Value at Risk Karolína Maňáková Value at risk Historická metoda Model-Building přístup Lineární model variance a kovariance Metoda Monte Carlo Stress testing a Back testing Potenciální ztráta s danou pravděpodobností
Value at Risk Karolína Maňáková Value at risk Historická metoda Model-Building přístup Lineární model variance a kovariance Metoda Monte Carlo Stress testing a Back testing Potenciální ztráta s danou pravděpodobností
Vlastní čísla a vlastní vektory
 Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Pearsonův korelační koeficient
 I I.I Pearsonův korelační koeficient Úvod Předpokládejme, že náhodně vybereme n objektů (nebo osob) ze zkoumané populace. Často se stává, že na každém z objektů měříme ne pouze jednu, ale několik kvantitativních
I I.I Pearsonův korelační koeficient Úvod Předpokládejme, že náhodně vybereme n objektů (nebo osob) ze zkoumané populace. Často se stává, že na každém z objektů měříme ne pouze jednu, ale několik kvantitativních
Anotace závěrečné práce:
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘÍCÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘÍCÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV POČÍTAČOVÉ GRAFIKY A MULTIMÉDIÍ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER GRAPHICS AND
PROJEKT 3 2D TRAJEKTORIE KAMERY SEMESTRÁLNÍ PRÁCE DO PŘEDMĚTU MAPV
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
D E T E K C E P O H Y B U V E V I D E U A J E J I C H I D E N T I F I K A C E
 D E T E K C E P O H Y B U V E V I D E U A J E J I C H I D E N T I F I K A C E CÍLE LABORATORNÍ ÚLOHY 1. Seznámení se s metodami detekce pohybu z videa. 2. Vyzkoušení si detekce pohybu v obraze kamery ÚKOL
D E T E K C E P O H Y B U V E V I D E U A J E J I C H I D E N T I F I K A C E CÍLE LABORATORNÍ ÚLOHY 1. Seznámení se s metodami detekce pohybu z videa. 2. Vyzkoušení si detekce pohybu v obraze kamery ÚKOL
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U
 M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
Vstupní signál protne zvolenou úroveň. Na základě získaných údajů se dá spočítat perioda signálu a kmitočet. Obrázek č.2
 2. Vzorkovací metoda Určení kmitočtu z vzorkovaného průběhu. Tato metoda založena na pozorování vstupního signálu pomocí osciloskopu a nastavení určité úrovně, pro zjednodušování považujeme úroveň nastavenou
2. Vzorkovací metoda Určení kmitočtu z vzorkovaného průběhu. Tato metoda založena na pozorování vstupního signálu pomocí osciloskopu a nastavení určité úrovně, pro zjednodušování považujeme úroveň nastavenou
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které