ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ
|
|
|
- Miloš Černý
- před 7 lety
- Počet zobrazení:
Transkript

1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jakub Nosek MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ Bakalářská práce 2016
2 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta dopravní děkan Konviktská 20, 11 O 00 Praha 1 K Ústav letecké dopravy ZADÁNÍ BAKALÁŘSKÉ PRÁCE (PROJEKTU, UMĚLECKÉHO DÍLA, UMĚLECKÉHO VÝKONU) Jméno a příjmení studenta (včetně titulu): Jakub Nosek Kód studijního programu a studijní obor studenta: B LED - Letecká doprava Název tématu (česky): Modelování množství přenosů generovaných systémem ACAS v reálném prostředí Název tématu (anglicky): Modelling of a Number of Transmissions Generated by ACAS in a Real Environment Zásady pro vypracování Při zpracování bakalářské práce se řiďte osnovou uvedenou v následujících bodech: Popsání chování systému ACAS s ohledem na množství komunikace v pásmu 1030/1090 MHz. Pokročilé metody sledování/dotazování okolního provozu (Hybridní sledování, Whisper Shout,...),jejich užití a modelování v reálném prostředí. Vytvoření modelu k odhadu množství přenosí) (množství dotazl) a odpovědí) generovaných systémem ACAS/TCAS v reálném prostředí. Implementace ACAS modelu do celkového modelu popisující prostředí přehledových systém(). kooperativních
3 Rozsah grafických prací: dle pokynu vedoucího bakalářské práce Rozsah průvodní zprávy: Seznam odborné literatury: minimálně 35 stran textu (včetně obrázku, grafu a tabulek, které jsou součástí průvodní zprávy) ICAO Annex 10 Volume IV Surveillance and Collision Avoidance Systems ICAO Doc 9863 ACAS Manual RTCA D MOPS for TCAS II Vedoucí bakalářské práce: Ing. Stanislav Pleninger, Ph.D. Datum zadání bakalářské práce: 25. října 2015 (datum prvního zadání této práce, které musí být nejpozději 10 měsíca před datem prvního předpokládaného odevzdání této práce vyplývajícího ze standardní doby studia) Datum odevzdání bakalářské práce: 25. srpna 2016 a) datum prvního předpokládaného odevzdání práce vyplývající ze standardní doby studia a z doporučeného časového plánu studia b) v případě odkladu odevzdání práce následující datum odevzdání práce vyplývající z doporučeného časového plánu studia --.::~~ doc. Ing. Stanislav zabo, PhD. MBA prof. Dr. Ing. Miroslav Svítek, dr. h. c. vedoucí děkan fakulty Ústavu letecké dopravy Potvrzuji převzetí zadání bakalářské práce. Jakub Nosek jméno a podpis studenta V Praze dne října 2015
4
5 Poděkování Na tomto místě bych rád poděkoval vedoucímu bakalářské práce, Ing. Stanislavu Pleningerovi, PhD., za cenné připomínky a rady, které mi při tvorbě této práce poskytl. Dále pak Ing. Petrovi Jonášovi za konzultování bakalářské práce a poskytnuté informace. Čestná prohlášení Předkládám tímto k posouzení a obhajobě bakalářskou práci, zpracovanou na závěr studia na ČVUT v Praze Fakultě dopravní. Nemám závažný důvod proti užívání tohoto školního díla ve smyslu 60 Zákona č. 121/2000 Sb., o právu autorském, o právech souvisejících s právem autorským a o změně některých zákonů (autorský zákon). Prohlašuji, že jsem předloženou práci vypracoval samostatně a že jsem uvedl veškeré použité informační zdroje v souladu s Metodickým pokynem o etické přípravě vysokoškolských závěrečných prací. V Praze dne: 25. srpna 2016 Podpis: 4
6 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta dopravní MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ bakalářská práce srpen 2016 Jakub Nosek Abstrakt Cílem této bakalářské práce je popsání funkce sledování systémem ACAS se zaměřením na počet dotazů a odpovědí odeslaných na frekvenci 1030/1090 MHz za danou časovou jednotku. Postup sledování v jednotlivých módech je zobrazen pomocí vývojových diagramů, pomocí níž bude možné v budoucnu celý model chování počítačově namodelovat a poté naimplementovat do celkového modelu zatížení frekvence 1030/1090 MHz. Klíčová slova: ACAS/TCAS, odpovídač, 1030 MHz, 1090 MHz, mód C, mód S, hybridní sledování Abstract The aim of this Bachelor Thesis is to describe a function of ACAS surveillance focused on a number of interrogations transmitted on 1030/1090 MHz frequency per given time. The process of surveillance in different modes is shown with help of block diagrams which will be used in the future projects to model the described behavior. Key terms: ACAS/TCAS, transponder, 1030 MHz, 1090MHz, mode C, mode S, hybrid surveillance 5
7 Obsah Obsah... 6 Seznam použitých zkratek Úvod Sledování systémem ACAS Sledování v módu C Dotaz Odpověď Průběh sledování Zahájení sledování Průběh nominálního sledování Sledování letadel nacházejících se na zemi Perioda vysílání Překrývání odpovědí Whisper Shout Směrové antény Znázornění průběhu sledování pomocí diagramu Sledování v módu S Dotaz Odpověď Zprávy generované systémem ACAS Formáty zpráv Pole zpráv Squitter zprávy Acquisition squitter Extended squitter Monitorování okolního provozu Vysílání informace o aktivním RA Průběh sledování s využitím AS Zahájení sledování Nominální sledování Sledování letadel nacházejících se na zemi Znázornění průběhu sledování Perioda vysílání Znázornění průběhu sledování pomocí diagramu Průběh sledování s využitím ES Zahájení sledování Průběh sledování Zprávy DF=17 (ES) Ověřovací zprávy Znázornění průběhu pasivního sledování pomocí diagramu Model Konkrétní příklad modelové situace
8 5.2 Výsledky Závěr Použité zdroje informací Seznam obrázků Seznam tabulek Seznam příloh
9 Seznam použitých zkratek AA Address, Announced Pole pro oznámení adresy AC Altitude Code Kód výšky ACAS Airborne Collision Avoidance System Palubní protisrážkový systém ADS-B Automatic Dependent Surveillance- Broadcast Automatické závislé sledování- vysílání AGL Above Ground Level Výška nad zemí AQ Acquisition, Special Akviziční pole AS Acquisition Squitter Akviziční squitter CA Capability Způsobilost odpovídače DF Downlink Format Formát odpovědi ES Extended Squitter Rozšířený squitter FS Flight Status Status letu GNSS Global Navigation Satellite System Globální navigační družicový systém ME Message Extended Squitter Extended Squitter zpráva MTL Minimum Triggering Level Minimální úroveň intenzity signálu pro jeho přijetí odpovídačem MU Message, Comm-U Zpráva Comm-U MV Message, Comm-V Zpráva Comm-V NA Not Available Není dostupný(á) NM Nautical Mile Námořní míle PI Parity Field Parity pole 8
10 RA Resolution Advisory Doporučení úhybného manévru RI Air-to-Air Reply Information Informační odpověď vzduch-vzduch RL Reply Length Délka odpovědi SL Sensitivity Level Úroveň citlivosti SSR Secondary Surveillace Radar Sekundární přehledový radar TA Traffic Advisory Výstraha o provozu TC Type Code Typový kód TCAS Traffic Collision Avoidance System Palubní protisrážkový systém UF Uplink Format Formát dotazu VS Vertical Status Vertikální status 9
11 1 Úvod Letecká doprava je druhem dopravy, jejíž objem má dlouhodobě rostoucí tendenci a na jejíž bezpečnost jsou kladeny vysoké nároky. Z tohoto důvodu je důležité, aby měli řídící letového provozu, ale také samotná letadla a jejich posádky, neustále aktualizované informace o poloze letadel v jejich blízkosti. Řídící tyto informace využívají pro poskytování letových provozních služeb a letadla a jejich posádky pro zvýšení situačního povědomí. Všechna patřičně vybavená letadla využívají pro komunikaci s pozemními sekundárními radary, stejně jako pro komunikaci s letadly v okolí, frekvenční pásmo 1030/1090 MHz. S rostoucím objemem letecké dopravy však hrozí přetížení tohoto pásma a díky tomu i ztráta přehledových dat, která by mohla v krajních případech způsobit leteckou katastrofu. Jedním ze systémů, který pro komunikaci a sledování okolního provozu využívá frekvenční pásmo 1030/1090 MHz, je ACAS. Jedná se o systém, který sleduje okolní provoz a v případě nebezpečného sblížení s letadlem v okolí posádku o takové skutečnosti nejdříve informuje a v pokročilé fázi konfliktu i vypočítává a navrhuje úhybné manévry pro bezpečné vyhnutí letadel a zamezení srážky. Při sledování okolního provozu je tedy zapotřebí mít neustále aktualizované polohové informace přijaté od okolních letadel. To je umožněno odesíláním dotazů a následným přijímáním odpovědí, ve kterých jsou polohové informace zakódovány. Typ takových dotazů a odpovědí, které jsou generovány odpovídačem SSR a systémem ACAS, závisí na módu, ve kterém daný odpovídač pracuje. V současnosti se stále více využívá takzvaného hybridního sledování, které pro sledování okolního provozu využívá informace získané pomocí GNSS a ty následně pomocí ADS-B vysílá do svého okolí, aniž by bylo letadlo dotazováno. Díky tomu lze částečně snížit zátěž pásma 1030/1090 MHz. Cílem této práce je podat podrobný popis postupu dotazování a odpovídání v jednotlivých módech a zjistit periodu odesílání jednotlivých dotazů a odpovědí tak, aby se chování systému dalo na základě této práce počítačově namodelovat. Výsledný model bude poté součástí celkového modelu zatížení frekvenčního pásma 1030/1090 MHz. 10
12 2 Sledování systémem ACAS Pro sledování okolního provozu a v některých případech i varování pilotů o blízké hrozbě je zapotřebí, aby bylo letadlo vybaveno systémem ACAS a odpovídačem. Tyto dvě, do jisté míry samostatné a nezávislé jednotky, společně umožňují sledovat provoz v okolí vlastního letadla. Odpovídač je zařízení, které dokáže odpovídat na dotazy pozemních radarů, nebo okolních letadel. Podle formátů zpráv, které dokážou přijímat a odesílat, říkáme, že odpovídače pracují v několika módech. Módy, využívané odpovídačem, ale i systémem ACAS pro sledování okolního provozu jsou: mód C, mód S. Rozdíly mezi těmito módy a jejich funkce jsou podrobně popsány v následujících kapitolách. ACAS je systém, který dokáže okolní letadla dotazovat, na tyto dotazy přijímat odpovědi a ty poté využít pro stanovení polohy cíle. Součástí systému ACAS jsou antény, které jsou popsány v kapitole o sledování v módu C, a výpočetní jednotka, která na základě přijatých odpovědí dokáže propočítávat polohy sledovaných letadel. Odpovídač a ACAS jsou navrženy tak, aby se navzájem potlačovaly, pokud jeden z nich vysílá dotazy/odpovědi. V současné době existují 3 verze systému ACAS: ACAS I, ACAS II, ACAS III (navrhuje úhybné manévry ve vertikálním i horizontálním směru, zatím však nedošlo k jeho implementaci). Jelikož je v současné době téměř výhradně používán ACAS II, bude se tato práce věnovat pouze popisu sledování touto verzí systému. V této souvislosti je tak třeba zmínit, že ACAS II funguje pouze v případě, že je letadlo vybaveno odpovídačem pracujícím v módu S. Pokud je letadlo vybaveno starším typem odpovídače, poté nemá ACAS II na palubě a okolní letadla v tom případě nedotazuje. Dalším důležitým faktem je, že je systém ACAS II schopen vydávat úhybné manévry pouze ve vertikálním směru. Z toho důvodu je případná informace o azimutu letadla pouze informativní a při sledování slouží pouze pro informování pilota o směru, ze kterého se narušitel přibližuje. Při navrhování úhybných manévrů není tato informace brána v potaz. 11
13 3 Sledování v módu C Pokud je letadlo vybaveno starším typem odpovídače, pracujícím pouze v módu C, nemá takové letadlo na palubě systém ACAS II. Z toho důvodu nemůže dotazovat okolní letadla, sledovat jejich polohu a vydávat upozornění před hrozící kolizí. Takové letadlo pomocí odpovídače pouze odpovídá na dotazy v módu C vysílané okolními letadly, která jsou vybavená novějším odpovídačem umožňujícím pracovat v módu C i S (letadla s odpovídačem pracujícím v módu S mají na palubě ACAS II a jsou tak schopna dotazovat okolní provoz dotazy v módu S i v módu C). Dotazy a odpovědi v módu C jsou na rozdíl od těch v módu S neadresné. To znamená, že na ně odpovídají všechna letadla v okolí, která mají příslušné vybavení. 3.1 Dotaz Jednotlivé módy dotazů se od sebe liší počtem pulsů, délkou pulsů a vzdálenostmi mezi nimi. Dotaz, využívaný systémem ACAS pro dotazování v módu C (odesílaný na frekvenci 1030 MHz) se vyznačuje čtyřmi pulsy - P1, P2, P3 a P4. Těmto pulsům předchází potlačující puls S1, který se využívá při dotazování pokročilou metodu dotazování zvanou Whisper- Shout. Tato metoda dotazování je podrobně popsána v jedné z následujících kapitol. Puls P4 slouží k tomu, aby na tento dotaz neodpovídala letadla vybavená odpovídačem pracujícím v módu S. Pokud takové letadlo přijme tento dotaz, podle délky pulsu P4 si vyhodnotí, že odpověď neodešle a odešle ji až na případný adresný dotaz v módu S. Na dotaz v módu C tedy odpovídají pouze letadla vybavená starším typem odpovídače pracujícím pouze v módu C. Obrázek 1 Znázornění pulsů dotazu využívaného systémem ACAS pro dotazování v módu C 12
14 Délka všech pulsů dotazu v módu C je 0,8 µs. Vzdálenost mezi náběžnou hranou pulsu P1 a náběžnou hranou pulsu P3 je 21 µs, což je také vzdálenost, díky níž je dotaz v módu C jednoznačně identifikován odpovídačem. Vzdálenosti mezi náběžnými hranami pulsů S1 a P1 a mezi náběžnými hranami pulsů P3 a P4 jsou shodně 2 µs. Puls P2, který je vysílán jinou anténní vyzařovací charakteristikou, nežli ostatní zmiňované pulsy, slouží pro potlačení příjmu dotazů od postranních laloků antény při dotazování pozemním SSR radarem. Pokud je dotaz SSR radarem odeslán z hlavního laloku antény, mají pulsy P1 a P3 větší amplitudu než puls P2 a odpovídač takový dotaz přijme (pulsy P1 a P3 musí mít amplitudu větší než je amplituda pulsu P2 alespoň o 9 db). Pokud je dotaz přijat postranními laloky, větší amplitudu má puls P2 a dotaz v tomto případě nebude odpovídačem akceptován. Jednotlivé pulsy dotazu v módu C jsou znázorněny na Obrázku 1 a časové vzdálenosti (v mikrosekundách) v Tabulce 1. [1] [6] Tabulka 1 Časové vzdálenosti pulsů dotazu v módu C Puls Délka pulsu Tolerance Doba náběhu Doba doznění S1, P1, P2, P3, P4 0,8 ±0,05 0,05-0,1 0,05-0,2 3.2 Odpověď Odpověď v módu C (odesílaná na frekvenci 1090 MHz) sestává z 2 rámujících pulsů F1 a F2, jejichž náběžné hrany jsou od sebe vzdáleny 23 µs. Mezi pulsy F1 a F2 jsou poté umístěny jednotlivé datové pulsy. Náběžná hrana prvního datového pulsu je od náběžné hrany rámujícího pulsu F1 vzdálena 1,45 µs, což je zároveň také vzdálenost náběžných hran jednotlivých datových pulsů. Délka všech pulsů je 0,45 µs. Logická jednička je v odpovědi znázorněna přítomností pulsu, logická nula vynecháním pulsu. Jednotlivé pulsy odpovědi v módu C jsou znázorněny na Obrázku 2 a časové vzdálenosti (v mikrosekundách) v Tabulce 2. [1] [6] Tabulka 2 Časové vzdálenosti pulsů odpovědi v módu C Puls Délka pulsu Tolerance Doba náběhu Doba doznění Všechny zmíněné 0,45 0,1 1 0,05-0,1 0,05-0,2 1 Tolerance 0,1 µs se vztahuje ke vzdálenosti mezi náběžnou hranou každého datového pulsu a náběžnou hranou pulsu F1. Tolerance vzdálenosti mezi jednotlivými datovými pulsy je 0,15 µs. 13
15 Obrázek 2 Znázornění pulsů odpovědi v módu C 3.3 Průběh sledování Dotazy v módu C jsou formátu Mode C Only All Call, což znamená, že nejsou adresné (neobsahují adresu odpovídače letadla, pro které je dotaz určen) a tak na ně odpovídají všechna letadla v okolí, která dotaz přijmou. Odpověď v módu C obsahuje pouze jedinou informaci a tou je nadmořská výška letadla. Neobsahuje tedy kód odpovídače letadla, díky kterému by bylo možné letadlo identifikovat stejně, jako je tomu v případě sledování v módu S. Vzdálenost sledovaného letadla (letadla narušitele) se určí na základě výpočtu pomocí známé informace o čase a rychlosti šíření signálu. Čas se určí tak, že se změří doba trvání od odeslání dotazu k přijetí odpovědi. Rychlost signálu je v tomto případě známa a je přibližně rovna rychlosti šíření světla. Azimut letadla se přibližně určí pomocí vícesegmentové antény. Jelikož je však ACAS II schopen navrhovat úhybné manévry pouze ve vertikálním směru, jsou pro tyto účely nejdůležitější informace o nadmořské výšce a vzdálenosti letadla narušitele Zahájení sledování Ještě před zahájením nominálního sledování daného cíle (v pravidelných intervalech), ACAS II nejdříve určuje a ověřuje počáteční polohu tohoto cíle během takzvaného počátečního určování polohy, při kterém musí být splněny následující podmínky. A. Vlastní (dotazující) letadlo musí na své dotazy přijmout 3 odpovědi ve 3 sledovacích intervalech určených pro přijetí odpovědí, tzn. tři odpovědi během tří sekund a: tyto odpovědi nesmí korelovat s již ustanovenými cíli, které jsou již sledovány, rychlost sbližování vlastního letadla a letadla narušitele, odvozená ze dvou posledních odpovědí, je menší než 1200 uzlů, [1] vzdálenost cíle vypočtená z příjmu první (nejstarší) odpovědi, odpovídá výše zmíněné rychlosti sbližování (vzdálenost cíle určená na základě příjmu první odpovědi musí odpovídat vzdálenosti, kterou určí výpočetní jednotka systému ACAS 14
16 na základě rychlosti sbližování obou letadel odvozené z přijetí dvou posledních odpovědí), [1] bity, které v těchto odpovědích udávají nadmořskou výšku letadla, jsou souvztažné (to znamená, že nadmořská výška udávaná v jednotlivých odpovědích musí odpovídat nadmořské výšce, kterou určí výpočetní jednotka systému ACAS výpočetní jednotka systému ACAS si po přijetí každé odpovědi určí předpokládanou nadmořskou výšku letadla narušitele, která by měla přibližně odpovídat nadmořské výšce tohoto letadla udávané v následující odpovědi). B. Odpověď na čtvrtý dotaz je přijata během 5 sledovacích intervalů, tzn. během 5 sekund. Nadmořská výška udávaná v této odpovědi se musí nacházet v intervalu ±200 ft od předpokládané nadmořské výšky, kterou systém ACAS určí logickým výpočtem při uvažování předchozích odpovědí (výpočetní jednotka systému ACAS si po přijetí každé odpovědi určí předpokládanou polohu letadla narušitele, která by měla přibližně odpovídat poloze tohoto letadla udávané v následující odpovědi). [1] C. Nadmořská výška sledovaného letadla (narušitele) udávaná ve všech čtyřech výše zmíněných odpovědích leží v intervalu ±10000 ft vzhledem k nadmořské výšce vlastního letadla. [1] Průběh nominálního sledování Pokud má již ACAS II určený validní cíl (na základě přijetí čtyř odpovědí zmíněných v předchozí kapitole a splnění všech podmínek), dotazuje tento cíl za účelem pravidelné aktualizace jeho polohy nominálně frekvencí jedenkrát za sekundu a to opět dotazy ve formátu Mode C Only All Call (viz Obrázek 3). Aby mohly být informace obsažené v odpovědích odesílaných narušitelem použity pro aktualizaci polohy tohoto letadla (narušitele), musí splňovat následující kritéria: vzdálenost letadel (vlastního letadla a letadla narušitele) určená změřením času od odeslání dotazu do přijetí odpovědi, musí ležet v intervalu, který systém ACAS určí logickým výpočtem na základě vzdáleností získaných z předešlých (již dříve přijatých) odpovědí, [1] nadmořská výška indikovaná v odpovědi musí ležet v intervalu ±200 ft od předpokládané nadmořské výšky, kterou určí výpočetní jednotka systému ACAS na základě nadmořských výšek obsažených v předešlých (již dříve přijatých) odpovědích. [1] 15

17 Obrázek 3 Průběh sledování v módu C Sledování letadel nacházejících se na zemi Letadla, která jsou díky přijaté nulové nadmořské výšce v odpovědi identifikována jako cíle nacházející se na zemi, jsou dále sledována, ale informace obsažené v jejich odpovědích nejsou poskytovány výpočetní jednotce ACAS II. [1] Perioda vysílání Perioda dotazování (i odpovídání) letadel v módu C je znázorněna v Tabulce 3. [1] Tabulka 3 Perioda vysílání (mód C) Zpráva Perioda vysílání (s) Průměr (s) Frekvenční pásmo Mode C Only All Call /1090 MHz Překrývání odpovědí Překrývání odpovědí (tzv. Synchronous Garble) je problém, kdy na jeden dotaz odpoví více letadel, která se nacházejí v přibližně stejné vzdálenosti od dotazujícího letadla, a přijaté odpovědi se tudíž překryjí. Podle Obrázku 4 se tedy odpovědi překryjí, pokud se dotazovaná letadla nachází od sebe ve vzdálenosti do 1,7 námořních mil. Tato vzdálenost je zvolena na základě uvažování délky odpovědi v módu C a její rychlosti šíření. Za čas, který odpovídá délce 1,7 NM a rychlosti šíření signálu, se odpověď díky své délce nestačí odeslat celá a dotazující letadlo tak její část přijme současně s odpovědí od jiného letadla. [10] 16

18 Obrázek 4 Synchronous Garble Překrývání odpovědí lze výrazně omezit použitím metody dotazování Whisper Shout společně s využitím směrových antén. Stupeň omezení závisí na hustotě provozu, sekvenci Whisper Shout dotazů a azimutech směrové antény Whisper Shout Tato metoda je založená na sekvenci několika dotazů během jedné dotazovací periody (maximálně jedné sekundy). Každý z dotazů v sekvenci má odlišnou intenzitu pulsu S1 a P1, P3 a P4. Dotazy jsou odesílány v určeném pořadí od těch s nejnižší intenzitou až po ty s největší intenzitou. Využívá se tedy také rozdílné citlivosti příjmu jednotlivých odpovídačů. Maximální počet dotazů v jedné sekvenci je 24 (takový počet dotazů je však využíván minimálně) a podle standardu musí jedna sekvence obsahovat alespoň šest dotazů. Minimální čas mezi jednotlivými dotazy v sekvenci musí být 1 milisekunda, avšak všechny dotazy se musí stihnout odeslat v jedné dotazovací periodě. [1] Každý ze sekvence dotazů (kromě prvního dotazu) musí obsahovat puls S1, který se v odpovědi nachází 2 µs před pulsem P1 a má nižší intenzitu (viz Obrázek 1). Puls S1 slouží k potlačení odpovědí od letadel, která již v dané dotazovací periodě odpověděla. Intenzita všech pulsů se s každým dalším dotazem v sekvenci zvyšuje. [1] Každé letadlo přijímá pouze jeden až dva dotazy v jedné sekvenci. Letadla, která jsou blíže k dotazujícímu letadlu, přijímají dotazy s nižší intenzitou, zatímco ta vzdálenější přijímají dotazy o vyšší intenzitě (dotazy o nižší intenzitě se k nim nedostanou). Pokud dané letadlo přijme dotaz o určité intenzitě, další dotaz, který má vyšší intenzitu, již nepřijme, jelikož jeho příjem bude potlačen pulsem S1, který bude mít vyšší intenzitu než předcházející dotaz, který toto letadlo přijalo. První dotaz neobsahuje puls S1 z toho důvodu, aby bylo zajištěno, že v dané dotazovací periodě odpoví alespoň jedno letadlo v okolí. 17
19 Obrázek 5 Whisper Shout sekvence [10] Sekvence dotazů metody Whisper Shout je zobrazena na Obrázku 5. Jedná se o sekvenci 24 dotazů, tedy maximálního počtu dotazů, který může být během jedné dotazovací periody odeslán. Na obrázku lze vidět, že se s každým dalším dotazem zvyšuje intenzita jak potlačujícího pulsu S1, tak i ostatních pulsů určených pro dotaz. Intenzita potlačujícího pulsu dosahuje vždy stejné nebo vyšší hodnoty než intenzita dotazu, který byl v sekvenci odeslán před tímto potlačujícím pulsem a jemu předcházejícím dotazem. To je z toho důvodu, aby každé letadlo odpovědělo maximálně na 2 dotazy Směrové antény Další metodou, která se používá pro zamezení překrývání odpovědí, společně s Whisper Shout dotazováním, je metoda dotazování pomocí směrových antén. Součástí systému ACAS II jsou dvě antény, z nichž jedna je směrová a druhá všesměrová. Směrová anténa se nachází nahoře, zatímco všesměrová dole na trupu letadla. [1] Směrová anténa umožňuje vysílat signál ve čtyřech směrech- dopředu, dozadu, doprava a doleva a tudíž se využívá při dotazování, zejména pak v módu C (při dotazování všesměrovou anténou může díky jejímu umístění dole na trupu letadla docházet k odrazům signálu od země a tudíž vytváření falešných dotazů). V žádném případě však nesmějí být dotazy ani odpovědi odesílány oběma anténami najednou. Odpověď na dotaz je přijímána anténou, která dotaz odeslala. Díky vysílání signálu směrově lze snížit pravděpodobnost, že na dotaz v módu C odpoví letadla nacházející se přibližně ve stejné vzdálenosti od dotazujícího letadla a jejich odpovědi se překryjí. Odpovědi se v tomto případě překryjí, pouze pokud se letadla budou nacházet ve stejném kvadrantu směrové antény. Tomu lze však zabránit, nebo alespoň snížit pravděpodobnost, že se tak stane, pokud jsou letadla dotazována metodou Whisper Shout. 18
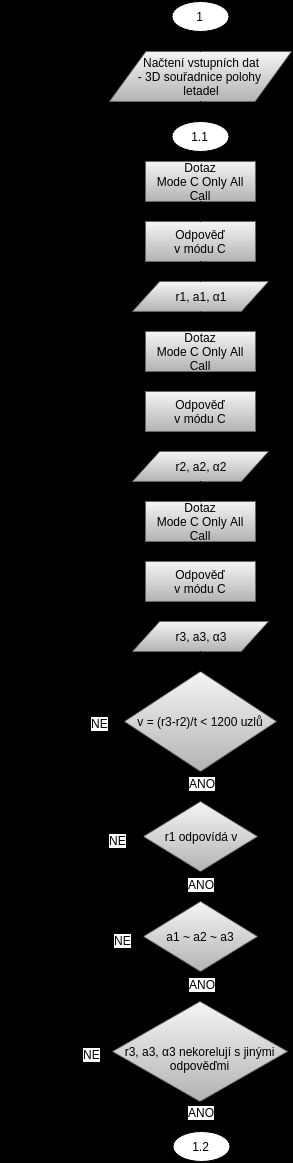
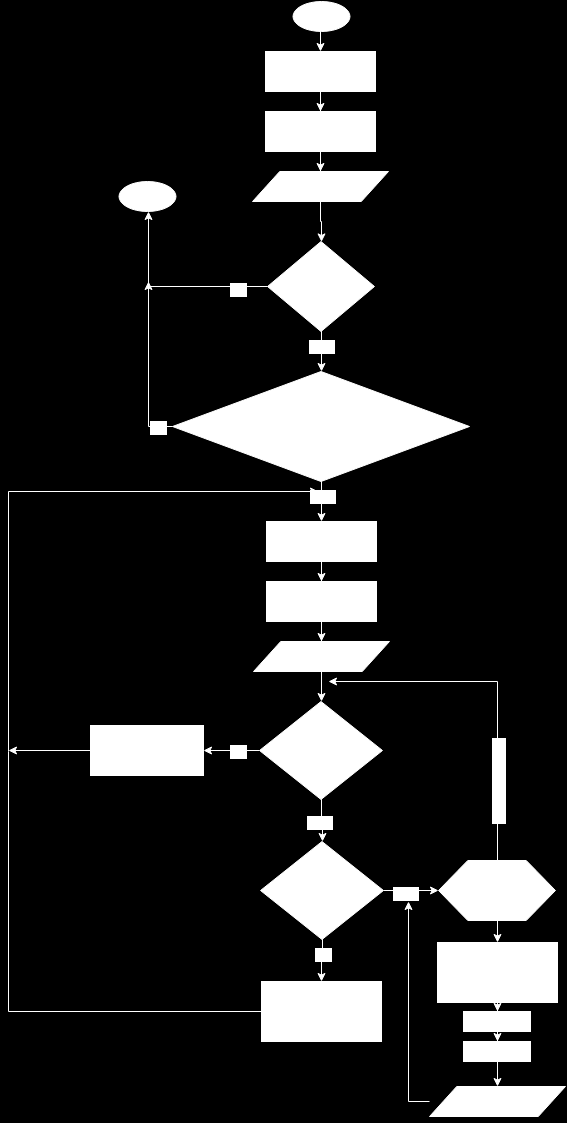
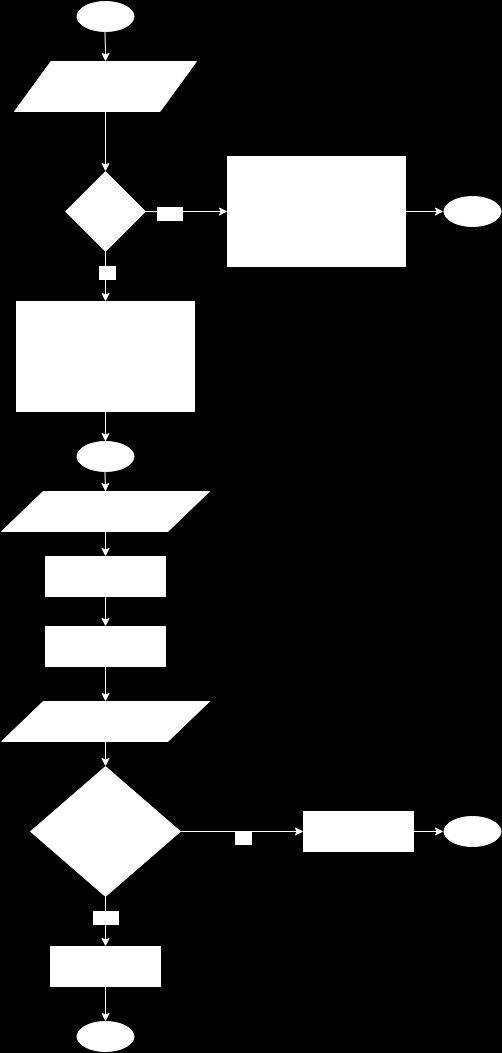
20 3.3.6 Znázornění průběhu sledování pomocí diagramu Průběh sledování v módu C je pomocí diagramů zobrazen na Obrázcích 6 a 7. Jedná se o průběh komunikace mezi dvěma letadly, z nichž jedno je vlastní letadlo a druhé je letadlo narušitel. Sekvence dotazů a odpovědí a jednotlivé podmínky v diagramu odpovídají podrobnému popisu v předešlých kapitolách. Pro přehlednost je bráno v úvahu pouze sledování jedním letadlem (vlastním letadlem), zatímco funkce sledování druhým letadlem (narušitelem) je zanedbána. Pro větší přehlednost diagramu je také předpokládáno, že na každý dotaz vždy vlastní letadlo obdrží odpověď a daný dotaz tedy není nutné opakovat. Význam jednotlivých veličin v diagramu je následující: r = vzdálenost vlastního letadla od letadla narušitele, a = nadmořská výška letadla narušitele, α = azimut letadla narušitele, t = čas, v = rychlost sbližování vlastního letadla a letadla narušitele, A = nadmořská výška vlastního letadla. 19

21 Obrázek 6 Diagram: Počáteční určení polohy v módu C 20

22 Obrázek 7 Diagram: Nominální sledování v módu C 21
23 4 Sledování v módu S Letadlo vybavené odpovídačem pracujícím v módu S dotazuje okolní letadla za účelem určení jejich polohy dotazy v módu C (které byly popsány v předešlé kapitole) i dotazy v módu S. Na dotazy v módu C mu odpovídají pouze letadla vybavená starším odpovídačem pracujícím v módu C, zatímco na dotazy v módu S odpovídají letadla vybavená novějším typem odpovídače pracujícím v módu S. Dotazy a odpovědi v módu S jsou adresné a tudíž může každou zprávu přijmout pouze letadlo, pro které je dotaz určen. Díky tomu lze pro každé jednotlivé letadlo měnit periodu dotazování v závislosti na jeho poloze (letadla narušitelé, která se nacházejí v blízkosti vlastního letadla, jsou dotazována častěji, než letadla, která jsou dostatečně vzdálená), čímž lze značně snížit zatížení pásma 1030/1090 MHz. 4.1 Dotaz Dotazy v módu S (odesílané na frekvenci 1030 MHz) se skládají z preambule a datového pulsu, ve kterém je pomocí binární fázové modulace kódována datová zpráva o velikosti 56 nebo 112 bitů (velikost závisí na formátu zprávy). Preambule se skládá z 2 pulsů (P1 a P2) o délce 0,8 µs, jejichž náběžné hrany jsou od sebe vzdáleny 2 µs. Pulsy P1 a P2 jsou vysílány stejnou anténou a mají stejnou amplitudu. Díky vyhodnocení pulsu P2 na tento dotaz neodpovídají letadla vybavená mód C odpovídači. Po preambuli následuje puls P6, který nese datovou zprávu. Tento datový puls může mít velikost 16,25 nebo 30,25 µs v závislosti na délce zprávy (16,25 µs odpovídá krátké zprávě o velikosti 56 bitů, zatímco 30,25 µs dlouhé zprávě o velikosti 112 bitů). 1,25 µs od náběžné hrany pulsu P6 se nachází referenční fázová změna, která slouží pro synchronizaci odpovídače. Ve vzdálenosti 0,5 µs od referenční fázové změny se již nachází samotný datový blok. Každý jednotlivý bit má v pulsu velikost 0,25 µs. Pro rozeznání, zdali bit obsahuje logickou jedničku nebo nulu slouží změna fáze o 180. Logické jedničce pak odpovídá změna fáze o 180 a logické nule vynechaná fázová změna. Jednotlivé pulsy dotazu v módu S jsou znázorněny na Obrázku 8 a časové vzdálenosti (v mikrosekundách) v Tabulce 4. [1] [5] 22
24 Tabulka 4 Časové vzdálenosti pulsů dotazu v módu S Puls Délka pulsu Tolerance délky Doba náběhu Doba doznění P1, P2 0,8 ±0,05 0,05-0,1 0,05-0,2 P6 (krátký) 16,25 ±0,125 0,05-0,1 0,05-0,2 P6 (dlouhý) 30,25 ±0,125 0,05-0,1 0,05-0,2 Obrázek 8 Znázornění pulsů dotazu v módu S 4.2 Odpověď Odpověď v módu S (odesílaná na frekvenci 1090 MHz) se stejně jako dotaz v módu S skládá z preambule a datového bloku. Preambule, jejíž délka je 8 µs, obsahuje 4 pulsy (P1, P2, P3 a P4), každý o délce 0,5 µs. První a druhý a zároveň i třetí a čtvrtý puls jsou od sebe vzájemně vzdáleny 0,5 µs. Za preambulí následuje datový blok, jehož velikost může být buď 56, nebo 112 bitů, v závislosti na délce zprávy. Datový blok je rozdělen na jednotlivé intervaly o délce 1 µs, z nichž každý obsahuje puls o délce 0,5 µs. Každý interval lze tak vyplnit dvěma pulsy. Pokud je puls přenesen v první polovině intervalu, značí přenos logickou jedničku. Naopak pokud je puls přenesen ve druhé polovině intervalu, přenos značí logickou nulu. Jednotlivé pulsy odpovědi v módu S jsou znázorněny na Obrázku 9 a časové vzdálenosti (v mikrosekundách) v Tabulce 5. [1] [5] Tabulka 5 Časové vzdálenosti pulsů odpovědi v módu S Puls Délka pulsu Tolerance Doba náběhu Doba doznění Všechny zmíněné 0,5 2 0,05 0,05-0,1 0,05-0,2 2 V případě spojení dvou pulsů v datovém bloku vznikne puls o délce 1 µs. 23
25 Obrázek 9 Znázornění pulsů odpovědi v módu S 4.3 Zprávy generované systémem ACAS Formáty zpráv Zprávy určené pro sledování okolního provozu v módu S existují v různých formátech, lišících se účelem zprávy, svou velikostí a v neposlední řadě také informací, kterou nesou. Vzestupné formáty mód S zpráv jsou následující: UF, DF. UF je vzestupný formát zprávy určený pro přenos informací od vlastního letadla k narušiteli, zatímco DF je vzestupný formát zprávy, který slouží pro přenos informací od narušitele k vlastnímu letadlu. Zprávy UF jsou odesílány na frekvenci 1030 MHz, zprávy DF na frekvenci 1090 MHz. Nejpoužívanější formáty zpráv využívané pro komunikaci mezi letadly (v některých případech i mezi letadly a pozemními sekundárními radary) vybavenými systémem ACAS II a zároveň nejdůležitější formáty zpráv pro účely této práce jsou uvedeny v Tabulce 6. [1] [3] 24
26 Tabulka 6 Formáty zpráv Formát zprávy Velikost Popis, účel Důležitá pole Acquisition squitter- zpráva je samovolně vysílána a DF=11 56 bitů obsahuje unikátní kód odpovídače. AA, PI, II, SI, CA Capability Mód S all-call odpověď na dotaz sekundárního radaru. Extended squitter- zpráva je DF= bitů samovolně vysílána pomocí ADS-B a mimo jiné obsahuje unikátní kód AA, ME, PI, CA Capability odpovídače a informaci o poloze. Krátká acquisition odpověď (pole AQ=1), která obsahuje kód mód S odpovídače, informaci o nadmořské výšce letadla a informaci o tom, zda se letadlo nachází na zemi DF=0 56 bitů nebo ve vzduchu. Krátká odpověď (pole AQ=0) VS, RI, SL, AC, AQ na dotaz UF=0 udávající nadmořskou výšku letadla. Dále obsahuje kód mód S odpovídače a informaci o tom, zda se letadlo nachází na zemi nebo ve vzduchu. Krátký acquisition dotaz (pole AQ=1) pro zjištění polohy UF=0 56 bitů letadla. AQ, RL Krátký dotaz (pole AQ=0) pro aktualizaci polohy letadla. 25
27 Dlouhá odpověď na dotaz UF=16 udávající adresu mód S odpovídače, DF= bitů nadmořskou výšku letadla, informaci o tom, zda se letadlo nachází na zemi VS, RI, AC, MV, SL nebo ve vzduchu a koordinační zprávu v případě aktivní výstrahy RA. Dlouhý dotaz na nadmořskou výšku letadla obsahující koordinační zprávu v případě aktivní výstrahy RA. UF= bitů Zpráva odesílaná pro potřeby monitorování okolního AQ, MU, RL provozu. Zpráva odesílaná pozemním stanovištím v případě aktivního RA. Krátká odpověď na dotaz pozemního DF=4 56 bitů radaru, která může být přijata letadlem v okolí při pasivním AC, FS monitorování zpráv Pole zpráv Každá zpráva odesílaná v módu S obsahuje několik polí, která nesou určitou informaci a v závislosti na délce této informace mají přiřazenu určitou velikost. Všechny zprávy mají stejné následující 2 pole: pole udávající formát zprávy (UF nebo DF) a 24 bitové parity pole (sloužící ke kontrole parity). Nejdůležitější pole a pole, která jsou důležitá pro účely této práce, jsou uvedena v Tabulce 7. [1] [3] 26
28 Pole Velikost Popis, účel Tabulka 7 Pole zpráv AA 24 bitů Obsahuje adresu mód S odpovídače. AC 13 bitů Obsahuje zakódovanou nadmořskou výšku letadla. AQ 1 bit Slouží k určení, zda se v případě zprávy UF=0 nebo UF=16 jedná o acquisition zprávu. CA Capability 3 bity Informace o typu (vybavenosti) odpovídače a informace o tom, zda je letadlo na zemi nebo ve vzduchu. ME 56 bitů Informace o poloze a identifikaci letadla. MU 56 bitů Udává informace pro koordinaci v případě aktivního RA a informaci o aktivním RA při vysílání speciálních RA zpráv letadlo-země. MV 56 bitů Odpověď na koordinační zprávy. PI 24 bitů Parity pole. Kontrola zprávy (kódu odpovídače). VS 1 bit Nese informaci o tom, zda je letadlo na zemi nebo ve vzduchu. RI 4 bity Nese informaci o tom, zda je letadlo vybaveno jednotkou ACAS a případně jaké verze. Je zde také zakódována maximální skutečná rychlost letadla, pokud je k dispozici. RL 1 bit Požadavek na odpověď ve specifickém formátu (DF=0 nebo DF=16). SL 3 bity Informace o zvolené úrovni citlivosti systému - Sensitivity level. FS 3 bity Informace o stavu letu (mimo jiné informace o tom, zda se letadlo nachází ve vzduchu nebo na zemi). II 4 bity Identifikační kód. V případě AS se pole rovná nule. 27
29 4.4 Squitter zprávy Při sledování okolního provozu v módu S využívají letadla squitter zprávy. Jsou to odpovídačem automaticky odesílané zprávy do okolí, aniž by bylo letadlo dotazováno. V této souvislosti je třeba rozlišovat typ mód S odpovídače, kterým je dané letadlo vybaveno. Odpovídač může odesílat a přijímat tzv. acquisition (AS) nebo extended (ES) squitter. Zmíněné dva typy squitter zpráv se liší velikostí informace (množstvím bitů), kterou přenáší (viz Tabulka 6). AS odesílají všechna letadla vybavená odpovídačem pracujícím v módu S, zatímco ES je nadstavba ke klasickému mód S odpovídači potřebná pro vysílání ADS-B dat. V případě systému ACAS II se používá pro hybridní sledování, které je popsáno dále. Letadlo může být tedy vybaveno buď pouze mód S odpovídačem schopným odesílat AS, nebo mód S odpovídačem schopným odesílat AS i ES (v takovém případě se odpovídač označuje 1090ES). V případě ES je třeba odpovídače ještě rozdělit na ty, které ES mohou pouze odesílat (v takovém případě mluvíme o odpovídači s funkcí ADS-B OUT) a odpovídače, které ES mohou odesílat i přijímat (ADS-B OUT i ADS-B IN). Není tedy možné, aby bylo letadlo vybaveno mód S odpovídačem schopným odesílat nebo přijímat pouze ES, bez možnosti odesílat i přijímat AS Acquisition squitter AS (DF=11) je zpráva, která je složena z 56 bitů, z nichž 8 bitů je použito pro pole CONTROL (skládající se z polí DF a CA Capability), 24 bitů pro pole ADRESA (AA) a dalších 24 bitů pro pole PARITY (PI). [1] Pole CONTROL je složeno z polí DF (určuje formát zprávy) a CA Capability. Formát AS je vždy DF=11. Pole ADRESA v sobě nese adresu mód S odpovídače. Pole PARITY, které se nachází na konci zprávy, slouží pro kontrolu dat. AS a pole, která jsou v něm obsažena, je zobrazen na Obrázku 10. [1] Obrázek 10 Acquisition squitter 28
30 4.4.2 Extended squitter ES (DF=17) je zpráva, která je složena ze 112 bitů. Pole CONTROL, ADRESA a PARITY jsou v ES stejná a slouží ke stejnému účelu jako v případě AS. ES však navíc obsahuje 56 bitové pole ADS-B ZPRÁVA. [1] Formát zprávy se může lišit v závislosti na účelu letu a typu vysílání polohových informací zakódovaných v 56 bitovém poli ADS-B ZPRÁVA. Možné formáty zpráv jsou následující: DF=17 (ADS-B), DF=18 (TIS-B) a DF=19 (military - pro vojenské účely). V civilním letectví se však téměř výhradně využívá DF=17. ES a pole, která jsou v něm obsažena, je zobrazen na Obrázku 11. [1] Obrázek 11 Extended squitter 4.5 Monitorování okolního provozu Každé letadlo, které se nachází v letové hladině FL180 a níže, a které je vybaveno systémem ACAS II, monitoruje okolní provoz (počítá množství letadel ve svém okolí) za účelem redukce počtu dotazů změnou intenzity vysílaného signálu. Omezení počtu a intenzity dotazů je tedy funkcí okolí letadla (okolního provozu). Monitorování probíhá tak, že každé letadlo jednou za 10 sekund vyšle maximální možnou intenzitou zprávu UF=16, která indikuje, že je dané letadlo (odesílající zprávu) vybaveno systémem ACAS II. Okolní letadla tyto zprávy monitorují a v závislosti na jejich množství poté mění intenzitu vysílaného signálu. Čím více monitorovacích zpráv UF=16 letadlo přijme, tím více sníží intenzitu vysílaného signálu (zprávy odesílané tímto letadlem nezachytí vzdálenější letadla). Perioda vysílání zpráv a frekvenční pásmo, na kterém jsou zprávy odesílány, jsou znázorněny v Tabulce 8. [1] [4] Zprávy UF=16 obsahují 24 bitovou adresu mód S odpovídače, díky které lze letadlo odesílající zprávu jednoznačně identifikovat. Díky této informaci a informaci o poloze letadla narušitele, která se získá nominálním sledováním (které bude vysvětleno dále), lze poté také určit přibližné rozmístění letadel ve vzdušném prostoru kolem vlastního letadla. Postup určení rozmístění letadel je však pro potřeby této práce nepodstatný a proto zde nebude dále popisován. [1] Pokud je množství letadel v okolí na základě výše zmíněného postupu rovno nebo vyšší stanovenému limitu a vlastní letadlo se nachází níže než FL180, parametry dotazování v módu C i v módu S jsou upraveny následovně. 29
31 Mód C Je snížena intenzita dotazů a zvýšen MTL během periody odposlouchávání zpráv. Mód S Také je snížena intenzita dotazů a zvýšen MTL během periody odposlouchávání zpráv. Maximální povolený limit pro snížení intenzity dotazů pro každý lalok horní antény je 10 db v případě dotazování v módu S a 7 db v případě dotazování v módu C. [1] Tabulka 8 Perioda monitorování okolního provozu Zpráva Perioda monitorování (s) Frekvenční pásmo UF= MHz 4.6 Vysílání informace o aktivním RA Každé letadlo vybavené systémem ACAS II vysílá v případě aktivní výstrahy RA tuto informaci pozemním radarům. Informace o aktivním RA je standardně zakódována do odpovědí na dotazy pozemních sekundárních radarů. Kromě toho je tato informace také maximální intenzitou odesílána každých 8 sekund spodní anténou v tzv. RA zprávě (zpráva ve formátu UF=16). Zpráva kromě informace o aktivním RA, která je obsažená v poli MU, obsahuje i identifikační kód letadla (squawk) a nadmořskou výšku letadla. [1] [9] Vysílání zprávy začíná ihned po vydání výstrahy RA, poté je zpráva periodicky vysílaná každých 8 sekund. Po ukončení RA je ve zprávě obsažena informace o takové skutečnosti. Perioda vysílání zprávy a frekvenční pásmo, na kterém je vysílána, jsou znázorněny v Tabulce 9. [1] [9] Tabulka 9 Perioda vysílání RA zprávy Zpráva Perioda vysílání (S) Frekvenční pásmo UF= MHz 4.7 Průběh sledování s využitím AS V této kapitole bude popsán postup sledování okolního provozu letadly, která nejsou vybavena ADS-B (odpovídač je schopen odesílat pouze krátké AS). 30
32 4.7.1 Zahájení sledování Každé letadlo samovolně a pravidelně vysílá jednou za sekundu zprávy DF=11 (AS) na frekvenci 1090 MHz a letadla v okolí vybavená systémem ACAS tyto zprávy pasivně přijímají (zprávy DF=11 jsou tedy odesílány, aniž by bylo dané letadlo dotazováno). Vlastní letadlo, které AS pasivně přijme, se ze zprávy dozví kód odpovídače letadla, které AS odeslalo. Po úspěšném přijetí AS zná vlastní letadlo adresu odpovídače sledovaného letadla (letadla, které AS odeslalo). Může tak již zahájit adresné dotazování tohoto letadla. Sledované letadlo je však již s velkou pravděpodobností dotazováno i jiným letadlem ve svém okolí nebo pozemním SSR radarem. Ještě před samotným dotazováním se tak vlastní letadlo, za účelem snížení počtu dotazů, snaží odpovědi narušitele na tyto dotazy zachytit. Pokud zprávy zachytí (zprávy typu DF=0 - odpověď jinému letadlu, nebo DF=4 - odpověď pozemnímu radaru), dozví se z nich mimo jiné informaci o nadmořské výšce letadla narušitele a informaci o tom, zda se letadlo narušitel nachází na zemi nebo ve vzduchu. Pokud je vlastní letadlo v pasivním monitorování (odposlechu zpráv) neúspěšné (sledované letadlo zprávy DF=0 nebo DF=4 ještě žádnému jinému letadlu nebo pozemnímu radaru ve svém okolí neodesílá), zahajuje aktivní dotazování acquisition dotazem UF=0 na frekvenci 1030 MHz. Tento dotaz slouží pro počáteční určení polohy letadla. Sledované letadlo na tento dotaz odpovídá acquisition zprávou DF=0 na frekvenci 1090 MHz, ve které je zakódována nadmořská výška letadla a informace o tom, zda se letadlo nachází na zemi nebo ve vzduchu. Pro rozeznání, zda jsou UF=0 a DF=0 klasickými zprávami, nebo zda se jedná o acquisition zprávy, slouží jednobitové pole AQ. Pokud se jedná o acquisition zprávy, pole AQ se rovná 1, pokud se o acquisition zprávy nejedná, pole AQ se rovná 0. Většinou je pro počáteční určení polohy odesílán pouze jeden acquisition dotaz, který je dostačující. Přesný počet acquisition dotazů však závisí na volbě konkrétního výrobce systému. [1] Jestliže letadlo při prvotním dotazování úspěšně přijme 2 odpovědi (kterými může být klasická i acquisition odpověď), ve kterých se udávaná nadmořská výška neliší více než o 500 ft, a které obsahují správnou adresu mód S odpovídače, poté je nadmořská výška a vzdálenost považována za prokázanou a na řadu přichází pravidelné nominální dotazování cíle. [1] Sledované letadlo není dále nominálně dotazováno tehdy, pokud vlastní letadlo aktivními dotazy zjistí, že se narušitel nachází ve vertikální vzdálenosti více než ±10000 ft. Nadmořská výška letadel, která se nacházejí vně tohoto intervalu, musí být ale stále monitorována, aby mohla být včasně identifikována v případě, že se již sledované letadlo dostane na hranice tohoto intervalu. Monitorována je buď pasivním poslechem zpráv DF=0, nebo (při absenci 31
33 těchto zpráv) aktivním dotazováním dotazy UF=0 každých 10 sekund. Naopak, pokud se letadlo nachází uvnitř tohoto intervalu, nazývá se validní cíl a nominálně dotazováno je. [1] Nominální sledování Perioda nominálního dotazování, poté kdy má již vlastní letadlo určenou počáteční polohu letadla narušitele, se liší v závislosti na vzájemné poloze letadel následovně. Perioda dotazování je ROVNA 5 sekundám, pokud se sledované letadlo nachází ve FL180 a níže a pokud je hodnota TAU rovna 60 sekundám a více. [1] [10] V případě, že je cíl vyhodnocen jako hrozba (tj. hodnota TAU odpovídá spuštění TA nebo RA), přechází letadlo na dotazování frekvencí jednou za sekundu. Typ zpráv se v tomto případě mění na dlouhé zprávy UF=16 (respektive DF=16), které obsahují 56 bitové pole obsahující informace potřebné pro koordinaci RA. [1] Ve všech ostatních případech je základní perioda dotazování validních cílů zprávami UF=0 ALESPOŇ 5 sekund. Pokud vlastní letadlo přijímá odpovědi od sledovaného letadla (narušitele), ve kterých však z nějakého důvodu není zahrnuta informace o nadmořské výšce, ale jinak tyto zprávy neobsahují chyby, mělo by i tak být toto letadlo dotazováno. [1] Vzdálenost letadel se určuje stejně jako v případě dotazování v módu C na základě změření času, během kterého došlo k odeslání dotazu a přijetí odpovědi (předpokládáme, že známe rychlost šíření signálu, která přibližně odpovídá rychlosti světla). Pokud je na jeden dotaz přijato více odpovědí, v potaz je brána pouze ta odpověď, která udává nejkratší vzdálenost letadel. [1] [9] [10] Pokud letadlo na svůj dotaz nedostane žádnou odpověď, dotaz opakuje. Celkový počet opakovaných dotazů v jednom dotazovacím cyklu nesmí být podle standardu více než 3 a více než 9 dotazů v 6 cyklech. [1] První dotaz je odesílán horní anténou. Pokud letadlo na první dva dotazy odeslané horní anténou nedostane žádnou odpověď, následující dva dotazy jsou již odesílány spodní anténou. [1] V případě, že letadlo nedostane odpověď ani po těchto 6 cyklech, dotazování je ukončeno, a to až do doby, kdy letadlo přijme dostatek AS zpráv, které již zaručují úspěšnost přijetí odpovědi na potencionální dotaz. [1] Všechny informace o sledovaném letadle, které jsou získány sledováním, zůstávají po určitou stanovenou dobu uloženy, a pokud nejsou data během dané doby aktualizována, odpovídač je vymaže. Každý odpovídač by měl mít takovou paměť, aby byl schopen si uchovat alespoň 150 mód S adres. [1] 32
34 Po přijetí každé zprávy probíhá vyhledávání a korekce případných chyb, které by zpráva mohla obsahovat, tak aby se zabránilo nadbytečnému dotazování. Chybné zprávy, které obsahují samé jedničky, samé nuly nebo adresu odpovídače totožnou s adresou vlastního odpovídače, jsou vyřazeny Sledování letadel nacházejících se na zemi Pokud je sledované letadlo identifikováno jako letadlo na zemi, to znamená, že se pole VS v odpovědích DF=0 rovná 1 a vlastní letadlo se nachází méně než 2000 ft (AGL) nad tímto letadlem, je toto letadlo monitorováno buď pasivním poslechem zpráv DF=0 nebo při absenci těchto zpráv nominálním aktivním dotazováním alespoň jednou za 5 sekund a to po celou dobu, kdy se cíl nachází na zemi nebo až do té doby, kdy přestane odesílat zprávy. [1] Znázornění průběhu sledování V následujícím příkladu průběhu sledování uvažujme 2 letadla (vlastní letadlo a letadlo narušitel) vybavená shodně odpovídačem pracujícím v módu S. V první fázi sledování odesílá letadlo narušitel jednou za sekundu DF=11 (AS) na frekvenci 1090 MHz (viz Obrázek 12). Tato zpráva je vysílána odpovídačem a obsahuje mimo jiné pole AA (adresa mód S odpovídače). Obrázek 12 První fáze dotazování- vysílání DF=11 Vlastní letadlo zprávu přijme a přečte si adresu odpovídače. Nyní, když zná adresu odpovídače letadla narušitele, odešle tomuto letadlu adresný acquisition dotaz UF=0 na frekvenci 1030 MHz (viz Obrázek 13), ve kterém je zakódována daná adresa odpovídače a mimo jiné také následující pole: AQ=1, RL=0 (značí, že letadlo na tento dotaz vyžaduje krátkou odpověď DF=0). 33
35 Obrázek 13 Druhá fáze dotazování- odeslání UF=0 Po přijetí dotazu UF=0, odpovídá narušitel krátkou odpovědí DF=0 na frekvenci 1090 MHz (viz Obrázek 14). V této odpovědi je zahrnuta nadmořská výška letadla a také jeho adresa mód S odpovídače. Dále jsou v odpovědi obsaženy mimo jiné i následující pole: AQ=1, SL (udává tzv. sensitivity level ), RI (v tomto případě jsou použity pouze pole 8-15). Obrázek 14 Třetí fáze dotazování- odeslání odpovědi DF=0 Po přijetí acquisition odpovědi zahajuje vlastní letadlo nominální dotazování narušitele dotazy UF=0, ve kterých se již pole AQ=0. Narušitel na tyto dotazy odpovídá zprávami DF=0 (ve kterých se pole AQ též rovná nule) Perioda vysílání Perioda vysílání jednotlivých typů zpráv v případě letadla vybaveného odpovídačem pracujícím v módu S je znázorněna v Tabulce 10. [1] [9] [10] 34
36 Tabulka 10 Perioda vysílání zpráv (mód S) Zpráva Perioda vysílání (s) Průměr (s) Frekvenční pásmo DF=11 0,8 1, MHz UF=0 Závislá na pozici cíle vůči vlastnímu letadlu. Periody dotazování za daných podmínek jsou uvedeny v Tabulce MHz DF=0 Periody sledování za daných podmínek jsou uvedeny v Tabulce MHz UF=16 0,8 1, MHz DF=16 0,8 1, MHz Tabulka 11 Perioda vysílání zpráv UF/DF=0 Perioda vysílání (s) Podmínka Letadlo není dotazováno Cíl se nachází na zemi a vlastní letadlo více než 2000 ft nad zemí = 5 5 Cíl není validním cílem. To znamená, že se nachází vně intervalu ±10000 ft od vlastního letadla. Cíl je vyhodnocen jako hrozba. To znamená, že hodnota TAU splňuje podmínky pro spuštění TA nebo RA. Cíl se nachází ve FL180 nebo níže a hodnota TAU je rovna nebo vyšší než 60 sekund. Ve všech ostatních případech. 35
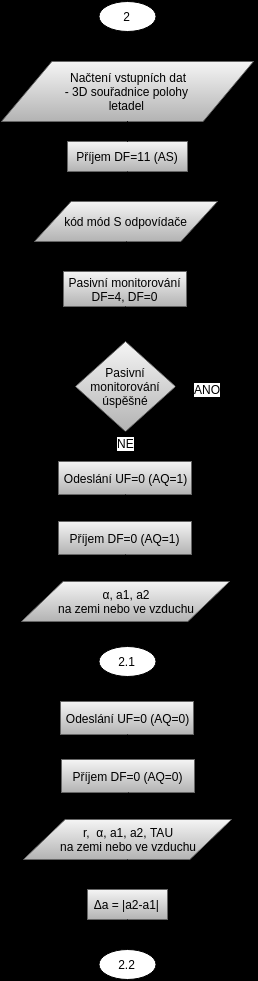
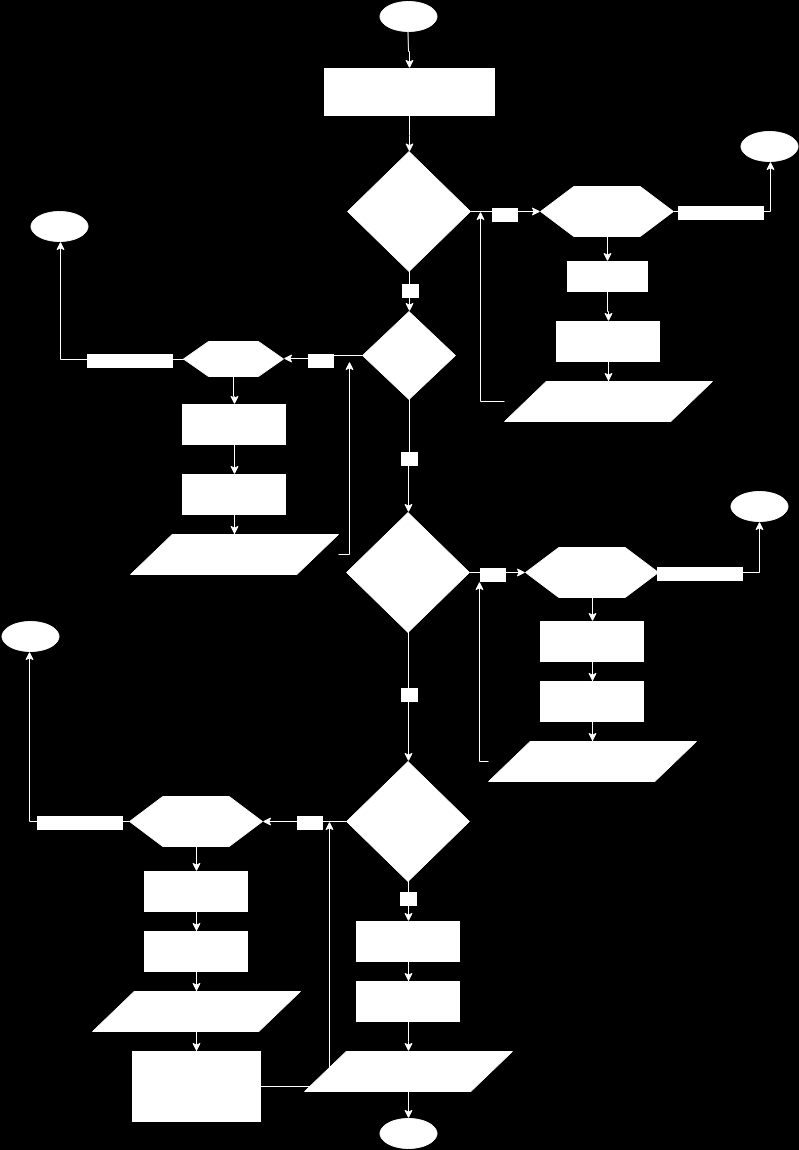
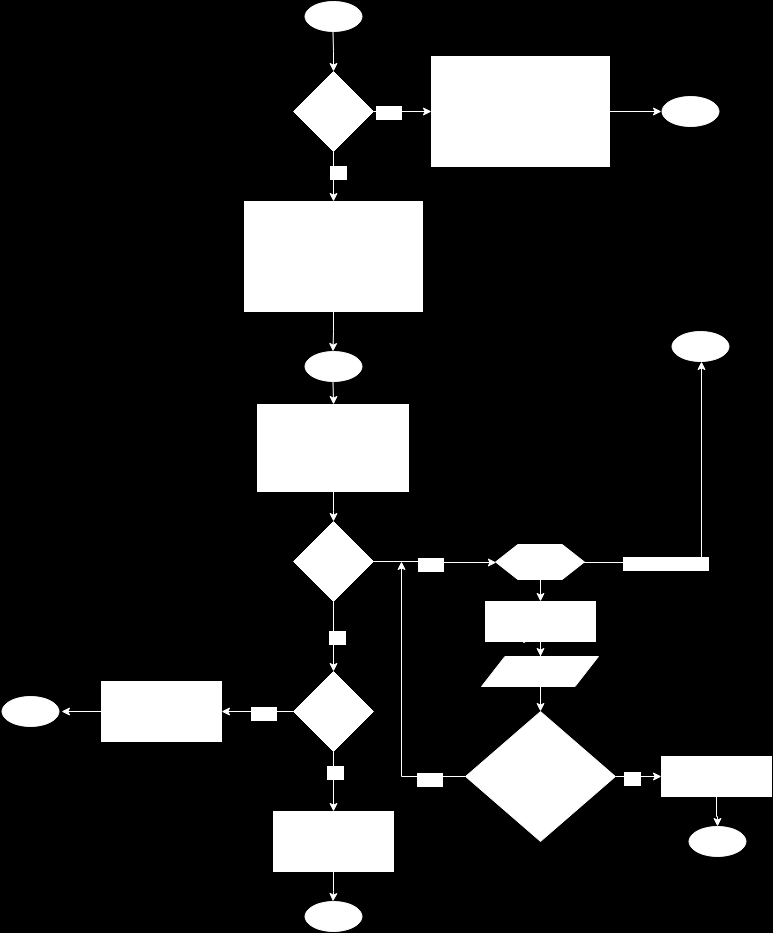
37 4.7.6 Znázornění průběhu sledování pomocí diagramu Průběh sledování v módu S je pomocí diagramů zobrazen na Obrázcích 15 a 16. Jedná se o průběh komunikace mezi dvěma letadly, z nichž jedno je vlastní letadlo a druhé je letadlo narušitel. Sekvence dotazů a odpovědí, jejich periody a jednotlivé podmínky v diagramu odpovídají podrobnému popisu v předešlých kapitolách. Pro přehlednost je bráno v úvahu pouze sledování jedním letadlem (vlastním letadlem), zatímco funkce sledování druhým letadlem je zanedbána. V reálném případě by byl diagram doplněn také o bloky zobrazující postup sledování vlastního letadla narušitelem. Pro větší přehlednost diagramu je také předpokládáno, že na každý dotaz vždy vlastní letadlo obdrží odpověď a daný dotaz tedy není nutné opakovat. Význam jednotlivých veličin v diagramu je následující: r = vzdálenost vlastního letadla od letadla narušitele, a1 = nadmořská výška vlastního letadla, α = azimut letadla narušitele, a2 = nadmořská výška letadla narušitele, TAU = čas do kritického sblížení (srážky). 36

38 Obrázek 15 Diagram: Průběh sledování v módu S (1) 37

39 Obrázek 16 Diagram: Průběh sledování v módu S (2) 38
40 4.8 Průběh sledování s využitím ES V této kapitole bude popsán postup sledování okolního provozu letadly, která jsou vybavena odpovídačem v módu S schopným odesílat a přijímat dlouhé ES. Sledování s využitím ES, které bývá nazýváno jako hybridní sledování, bylo zavedeno za účelem snížení počtu aktivních dotazů tak, aby se ulevilo zatížení frekvenčního pásma 1030/1090 MHz. Společně s AS (DF=11), je pomocí ADS-B odesílán také ES (DF=17), který je složen z několika zpráv obsahujících informace o poloze a identifikaci letadla. Díky tomu již nemusí být letadlo nominálně dotazováno aktivními dotazy (UF=0) a na tyto dotazy odpovídat (DF=0). Schéma technologie ADS-B je vyobrazeno na Obrázku Zahájení sledování Sledování začíná příjmem DF=17 (ES) obsahujícím 24 bitovou adresu letadla. Díky znalosti adresy letadla může být narušitel aktivně sledován zprávami UF/DF=0. Polohové informace získané aktivním sledováním jsou poté porovnávány s polohovými informacemi obsaženými ve zprávách DF=17. Nominální hybridní sledování je zahájeno, pokud jsou rozdíly hodnot získané aktivním (UF/DF=0) a pasivním (DF=17) sledováním následující: r 200 m, a 100 ft, α 45. Kde: r= vzdálenost vlastního letadla od narušitele, a= rozdíl nadmořských výšek letadla a narušitele, α= relativní směrník (azimut). Jestliže jsou všechny tyto rovnice splněny, nominální hybridní sledování může být zahájeno. V opačném případě musí být zahájeno klasické aktivní sledování v módu S. 39

41 Obrázek 17 Schéma ADS-B Zdroj: Průběh sledování Pokud bylo sledování zahájeno a byla tak určena počáteční poloha letadla, další průběh sledování je již založen na pasivním příjmu zpráv DF=17. Polohové informace obsažené v těchto zprávách jsou ale v pravidelných intervalech ověřovány aktivním dotazováním. Základní frekvence ověřování polohových informací aktivními dotazy je jedenkrát za 60 sekund. Frekvence ověřování polohových informací je ale zvýšena v případech, kdy jsou splněny následující podmínky. [4] [11] HROZBA: letadlo narušitel je považováno za hrozbu, pokud se vůči vlastnímu letadlu nachází v blízké vzdálenosti NEBO výšce, jinými slovy musí být splněna následující rovnice (Rovnice 1): [4] Kde: a= separace letadla narušitele v nadmořské výšce [ft], ȧ= hodnota změny nadmořské výšky ve [ft/s], r= šikmá vzdálenost narušitele v [NM], ṙ= hodnota změny vzdálenosti v [NM/s]. V případě hrozby je frekvence ověřování polohových informací aktivními dotazy jedenkrát za 10 sekund. 40

42 BLÍZKÁ HROZBA: letadlo narušitel je považováno za blízkou hrozbu, pokud se vůči vlastnímu letadlu nachází v blízké vzdálenosti A výšce, jinými slovy musí být splněna následující rovnice (Rovnice 2): [4] Kde význam jednotlivých veličin je stejný jako v případě Rovnice 1. V případě blízké hrozby je narušitel sledován standardně prostřednictvím aktivního dotazování s nominální frekvencí dotazů jedenkrát za sekundu. Frekvence ověřování polohových informací aktivními dotazy pro každý z uvedených případů jsou znázorněny na Obrázku 18. Obrázek 18 Ověřování polohových informací aktivními dotazy Zprávy DF=17 (ES) ES je odesílán v několika zprávách, které se liší svým typovým kódem (TC). Podle TC lze tedy jednoznačně určit, o kterou konkrétní zprávu se jedná. Nejdůležitější zprávy pro potřeby systému ACAS jsou popsány níže. Perioda jejich vysílání a frekvenční pásma jsou uvedeny v Tabulce 12. [2] Aircraft Identification Squitter slouží pro identifikaci letadla pomocí volací značky, například CSA123. [7] [8] Airborne Position Squitter je používán pro udání 3D polohy letadla ve vzduchu. Udává zeměpisnou šířku (latitude), zeměpisnou délku (longitude) a nadmořskou výšku (altitude). [7] [8] 41
43 Surface Position Squitter je používán pro udání polohy a rychlosti letadla na zemi. Na rozdíl od situace, kdy se letadlo vyskytuje ve vzduchu, je pro letadlo na zemi vysílána informace o jeho pozici a rychlosti v jedné zprávě. Pro obě informace je tedy používán pouze jeden registr a to z toho důvodu, že není potřeba kódovat informaci o nadmořské výšce. [8] Airborne Velocity Squitter určuje horizontální rychlost, vertikální rychlost a kurz letadla. Existují 4 subtypy těchto zpráv. Subtypy 1 (podzvukové rychlosti) a 2 (nadzvukové rychlosti) udávají horizontální rychlost vůči zemi, zatímco subtypy 3 (podzvukové rychlosti) a 4 (nadzvukové rychlosti) udávají horizontální rychlost vůči vzduchu. V naprosté většině případů se však používá subtyp 1. [7] [8] Event Driven Squitter slouží pro přenos dodatečných informací. [8] Tabulka 12 Periody ES zpráv a frekvenční pásma, na kterých jsou odesílány Zpráva Perioda (s) Průměr (s) Frekvenční pásmo Airborne Position Squitter 0,4 0,6 0, MHz Surface Position Squitter 0,4 0,6 3 0,5 (5) MHz Aircraft Identification Squitter 4,8 5,2 4 5 (10) MHz Airborne Velocity Squitter 0,4 0,6 0, MHz Event Driven Squitter Max. 0,5 0, MHz Ověřovací zprávy Jak již bylo zmíněno, poloha letadla určená pomocí pasivního sledování, je ověřována aktivními dotazy. Typy zpráv aktivních dotazů a jejich frekvenční pásma jsou uvedeny v Tabulce 13 a v Tabulce 14. V případě, kdy je letadlo narušitel vyhodnoceno jako blízká hrozba, přechází pasivní sledování na sledování aktivní, jehož sekvence dotazů a jejich perioda jsou popsány v kapitole o sledování s využitím AS. 3 Perioda odesílání zpráv Surface Position Squitter závisí na tom, jestli je letadlo v pohybu, či nikoli. Pokud se letadlo po zemi pohybuje alespoň rychlostí 10 m za 30 s, poté je perioda odesílání squitteru 0,5 s. Pokud se letadlo nepohybuje, nebo se pohybuje rychlostí nižší než 10 m za 30 s, poté odešle zprávu každých 5 sekund. 4 Stejně jako v případě Surface Position Squitteru závisí perioda odesílání zpráv na tom, zdali se letadlo pohybuje, či nikoli. Pokud se letadlo pohybuje alespoň rychlostí 10 m za 30 s, poté je perioda odesílání zpráv 5 s, v opačném případě je perioda 10 s. 42
44 Tabulka 13 Periody a frekvenční pásma ověřovacích zpráv Zpráva Perioda (s) Frekvenční pásmo UF= MHz DF= MHz Tabulka 14 Periody a frekvenční pásma ověřovacích zpráv v případě HROZBY Zpráva Perioda (s) Frekvenční pásmo UF= MHz DF= MHz Znázornění průběhu pasivního sledování pomocí diagramu Na Obrázku 19 je pomocí diagramu zobrazen postup počátečního určení polohy v případě využití ES. Na Obrázku 20 je diagram, který navazuje na diagram na Obrázku 19 a zobrazuje průběh hybridního sledování po tom, co již byla určena počáteční poloha. Diagramy zobrazují celý postup hybridního sledování pro případ 2 letadel, z nichž jedno je letadlo vlastní a druhé letadlo narušitel. Vlastní letadlo sleduje narušitele, a tudíž přijímá ES a odesílá ověřovací aktivní dotazy. Pro přehlednost je bráno v úvahu pouze sledování jedním letadlem (vlastním letadlem), zatímco funkce sledování druhým letadlem je zanedbána. V reálném případě by byl diagram doplněn také o bloky zobrazující postup sledování vlastního letadla narušitelem. Pro větší přehlednost diagramu je také předpokládáno, že na každý dotaz vždy vlastní letadlo obdrží odpověď a daný dotaz tedy není nutné opakovat. Význam jednotlivých veličin v diagramu je následující: r = vzdálenost vlastního letadla od letadla narušitele, a = nadmořská výška letadla narušitele, α = azimut letadla narušitele. 43

45 Obrázek 19 Diagram: Počáteční určení polohy 44

46 Obrázek 20 Diagram: Průběh hybridního sledování 45
47 5 Model Podle popsaného postupu sledování systémem ACAS v jednotlivých módech je nyní možné vytvořit model pro zjištění počtu dotazů a odpovědí za danou časovou jednotku a z něho určit přibližné zatížení frekvenčního pásma 1030/1090 MHz. 5.1 Konkrétní příklad modelové situace Namodelováno je vzájemné dotazování 5 letadel, jejichž poloha je znázorněna na Obrázku 21. Potřebné informace o všech letadlech jsou uvedeny v Tabulce 15 a v Tabulce 16. Z tabulek je patrné, že 4 letadla jsou vybavena odpovídačem pracujícím v módu S, z nichž 2 letadla jsou vybavena odpovídačem umožňujícím hybridní sledování (1090ES). Jedno letadlo je vybaveno odpovídačem v módu C, a tudíž nedisponuje systémem ACAS II. Letadla 1 a 2 letí ve stejné letové hladině a díky jejich kritické vzájemné vzdálenosti je spuštěna výstraha RA. Letadlo 3 je na letišti a má zapnutý odpovídač. Všechna ostatní letadla se nachází ve vzduchu. Jelikož je situace modelována bez použití počítačového programování, v potaz byly brány následující zjednodušení: Je předpokládáno, že se v prostoru nachází pouze letadla, která jsou zadána. V dosahu systému ACAS (cca 40 NM) jednotlivých zadaných letadel se tedy žádná jiná letadla, která by mohla být potenciálně dotazována nebo dotazovat zadaná letadla, nenacházejí. Je předpokládáno, že každé jednotlivé letadlo již má sledování všech ostatních letadel zahájeno a tudíž má i určenou počáteční polohu všech letadel. Letadla se tedy dotazují nominálně podle pravidel popsaných v předešlých kapitolách (jednotlivé dotazy a odpovědi při zahájení sledování a počátečním určení polohy mají jen minimální vliv na konečný počet přenosů a zatížení frekvenčního pásma). Letadla se nepohybují, nebo se pohybují takovou rychlostí, aby se během časového úseku modelování (1 minuta), nezměnila pravidla pro počet dotazů a odpovědí. Je předpokládáno, že délka trvání výstrahy RA je 30 sekund a poté jsou již letadla navzájem dotazována nominálně. V případě dotazů v módu C se bere v úvahu dotazování metodou Whisper Shout a to s pevně stanoveným počtem dotazů v jedné sekvenci bez ohledu na množství letadel v okolí. Počet dotazů v sekvenci je stanoven na 6. Letadla vybavená odpovídačem pracujícím pouze v módu C odpovídají pouze na 1 dotaz v sekvenci. 46
48 Obrázek 21 Poloha letadel Tabulka 15 Informace o letadlech ID letadla Výbava (odpovídač) Letová hladina Výstraha 1 S (1090ES) FL350 RA 2 S FL350 RA 3 S FL0 NA 4 S (1090ES) FL440 NA 5 C FL310 NA Tabulka 16 Vzdálenosti mezi zadanými letadly NM 19 NM 30 NM 15 NM 2 3 NM 10 NM 27 NM 25 NM 3 19 NM 10 NM 40 NM 40 NM 4 30 NM 27 NM 40 NM 21 NM 5 15 NM 25 NM 40 NM 21 NM 47
49 5.2 Výsledky Výsledky modelování (počet dotazů a odpovědí) jsou zobrazeny na Obrázku 22 a na Obrázku 23. Z grafů lze vyčíst počet jednotlivých formátů zpráv, které byly odeslány všemi zadanými letadly za 60 sekund a také porovnat počet zpráv odeslaných na frekvencích 1030 MHz a 1090 MHz. Průměrný počet zpráv odeslaných zadanými letadly systémem ACAS i odpovídačem je každou sekundu přibližně 45 (přibližně 9 zpráv za 1 sekundu na jedno letadlo). Ve druhém grafu je možné si všimnout značného rozdílu mezi zatížením frekvence 1030 MHz a 1090 MHz. Výrazně vyšší množství přenosů na frekvenci 1030 MHz je způsobeno dotazy metodou Whisper Shout, díky níž odesílají 4 letadla v modelu po 6 dotazech Mode C Only All Call za sekundu. Jak je patrné z prvního grafu, zátěži frekvence 1090 MHz výrazně přispívají zprávy ES (a to dokonce přibližně dvakrát více než zprávy AS). Mohlo by se zdát, že je tento fakt v rozporu s tvrzením v úvodu této práce, kde je uvedeno, že hybridní sledování bylo zavedeno za účelem snížení zátěže frekvenčního pásma 1030/1090 MHz. Není tomu ale tak, protože je třeba mít v této souvislosti na paměti následující skutečnosti: Díky tomu, že jsou ve zprávách ES zahrnuty všechny potřebné polohové informace (dokonce více informací, než ve zprávách využívaných v případě klasického aktivního dotazování s využitím AS), není letadlo vysílající ES aktivně dotazováno, čímž je sníženo množství odeslaných zpráv UF/DF=0. ADS-B nebylo primárně zavedeno pro účely systému ACAS. Jeho primární funkcí je rozšířit dostupnost polohové informace i pro využití bez pozemní radarové přehledové infrastruktury. ACAS tyto zprávy, které jsou letadly odesílány nezávisle na něm, pouze využívá pro vlastní potřeby. Se zavedením ES se tedy zatížení pásma 1030/1090 MHz snižuje zejména proto, že již není třeba aktivního nominálního dotazování letadla pozemním SSR radarem. Skutečný přínos ES se tak na výsledcích modelování projeví až po implementaci modelu zatížení pásma systémem ACAS do celkového modelu zatížení frekvence 1030/1090 MHz. 48
50 POČET ZPRÁV POČET ZPRÁV Počet dotazů a odpovědí odeslaných za 60 sekund DF=11 DF=17 UF=0 DF=0 UF=16 DF=16 Dotaz Mode C Only All Call FORMÁT ZPRÁVY 240 Odpověď v Módu C Obrázek 22 Graf: Počet dotazů a odpovědí v závislosti na formátu zprávy Počet dotazů a odpovědí odeslaných za 60 sekund MHz 1090 MHz FREKVENCE Obrázek 23 Graf: Počet zpráv přenesených na frekvenci 1030 MHz a 1090 MHz Zajímavá jsou také data v Tabulce 17 a v Tabulce 18, která ukazují průměrné vytížení odpovídačů během jedné sekundy na jedno letadlo. Standardně by měl být mód S odpovídač schopen za sekundu odeslat až 500 odpovědí v módu C a až 50 odpovědí v módu S (z toho 16 dlouhých a 34 krátkých). [12] 49
51 Tabulka 17 Zatížení odpovídače odpověďmi v módu C Mód C Standard Model % zatížení odpovídače Počet odpovědí za sekundu ,8 Tabulka 18 Zatížení odpovídače odpověďmi v módu S Mód S Standard Model % zatížení odpovídače Počet odpovědí za sekundu 50 1,9 3,8 Z hodnot, které poskytuje tento model, je tedy zřejmé, že zatížení odpovídačů je při takto malém počtu letadel a zvoleném vybavení pouze minimální. 50
52 6 Závěr Systém ACAS je dnes již standardní výbavou každého dopravního letadla. Všechna dopravní letadla, jejichž vzletová hmotnost je vyšší než 5700 kg, nebo letadla, která jsou schválena pro přepravu více než 19 cestujících, musí být vybavena verzí ACAS II. Tato verze umožňuje, s pomocí odpovídače, sledování okolního provozu a případné výstrahy a koordinované návrhy úhybných manévrů na takové úrovni, že v případě správné kooperace pilota se systémem je pravděpodobnost srážky dvou shodně vybavených letadel ve vzduchu téměř nulová. V souvislosti se zdokonalující se funkcí sledování však rostou nároky na vytížení frekvenčního pásma 1030/1090 MHz, které je využíváno nejen pro komunikaci systému ACAS, ale také pro sledování provozu ve vzdušném prostoru pozemními sekundárními radary. ACAS však svou komunikací do tohoto zatížení přispívá významnou měrou. Jistým opatřením proti přetížení frekvence, které by mohlo mít katastrofální následky, je postupné zavádění ADS-B, které se využívá také pro pokročilé sledování systémem ACAS, zvaným hybridní sledování. Cílem této bakalářské práce bylo popsání postupu sledování okolního provozu systémem ACAS a jeho namodelování se zaměřením na počet dotazů a odpovědí v pásmu 1030/1090 MHz. Postup sledování byl popsán na základě standardu RTCA, avšak v této souvislosti je třeba zmínit, že systémy jednotlivých výrobců se mohou v postupu dotazování mírně lišit, zejména pak v počtu dotazů a odpovědí, které nejsou standardem přímo stanoveny. Na základě popsaného postupu byl vytvořen vývojový diagram a pomocí něho zjednodušený model pro určení počtu dotazů a odpovědí na frekvenci 1030/1090 MHz pro 5 vzájemně se dotazujících letadel, kde každému letadlu byly přiřazeny jiné počáteční podmínky a jiné vybavení (typ odpovídače). V době dokončování této bakalářské práce však ještě nebyl dokončen celkový model zatížení frekvenčního pásma 1030/1090 MHz a tak nebylo možné model sledování systémem ACAS do celkového modelu zakomponovat. Jelikož bylo při modelování situace bráno v úvahu několik zjednodušení, je třeba na výsledky nahlížet pouze jako na odhad počtu přenosů. Pro získání přesného počtu dotazů a odpovědí je třeba na základě vytvořeného vývojového diagramu sestavit počítačový model, který by v úvahu nebral téměř žádná zjednodušení. Pro modelování výsledků množství přenosů, blížících se stoprocentní přesnosti, by bylo potřeba z reálného provozu vysledovat přesný postup dotazování systémů jednotlivých výrobců a ty následně zohlednit při přiřazování vybavení jednotlivým letadlům v modelu. Takové naprogramování a rozšíření modelu a jeho následné zakomponování do celkového modelu zatížení pásma 1030/1090 MHz by mohlo být například tématem mé diplomové práce. 51
53 Použité zdroje informací [1] RTCA/DO-185A: SC-147. Minimum Operational Performance Standards for Traffic Alert and Collision Avoidance System II (TCAS II). [PDF] RTCA, Inc. [2] EUROCONTROL. Clarification Mode S Transponder in an Airport/A-SMGCS Environment. [PDF] [ ]. Dostupné z: [3] STAMPER W. Understanding mode S technology. [PDF] [ ]. Dostupné z: 512RFDSF3.pdf [4] MINISTERSTVO DOPRAVY ČR. Předpis L10 - O civilní letecké telekomunikační službě svazek IV Přehledový radar a protisrážkový systém, svazek IV. [ONLINE] [ ]. Dostupné z: [5] GERTZ J.L. Fundamentals of Mode S Parity Coding. [PDF] [ ]. Dostupné z: 117_WW pdf [6] DARRYL P. Mode A and mode C: The straight scoop on how it works. [ONLINE]. ND. [ ]. Dostupné z: [7] JUNZI S. ADS-B Decoding Guide. [ONLINE] [ ]. Dostupné z: [8] GRAPPEL R.D., WIKEN R.T. Guidance Material for S-Specific Protocol Application Avionics. [PDF] [ ]. Dostupné z: 334_WW pdf [9] EUROCONTROL. ACAS II Guide- Airborne Collision Avoidance System II (incorporating version 7.1). [PDF] [10] FAA. Introduction to TCAS II Version 7. [PDF] [11] ICAO. Airborne Collision Avoidance System (ACAS) Manual (Doc 9863). [PDF] [12] KHALID M., MANN S.M. Exposure to EMFs from Lightweight Aviation Transponders. [PDF] [ ]. Dostupné z: 52
54 Seznam obrázků Obrázek 1 Znázornění pulsů dotazu využívaného systémem ACAS pro dotazování v módu C...12 Obrázek 2 Znázornění pulsů odpovědi v módu C...14 Obrázek 3 Průběh sledování v módu C...16 Obrázek 4 Synchronous Garble...17 Obrázek 5 Whisper Shout sekvence [10]...18 Obrázek 6 Diagram: Počáteční určení polohy v módu C...20 Obrázek 7 Diagram: Nominální sledování v módu C...21 Obrázek 8 Znázornění pulsů dotazu v módu S...23 Obrázek 9 Znázornění pulsů odpovědi v módu S...24 Obrázek 10 Acquisition squitter...28 Obrázek 11 Extended squitter...29 Obrázek 12 První fáze dotazování- vysílání DF= Obrázek 13 Druhá fáze dotazování- odeslání UF= Obrázek 14 Třetí fáze dotazování- odeslání odpovědi DF= Obrázek 15 Diagram: Průběh sledování v módu S (1)...37 Obrázek 16 Diagram: Průběh sledování v módu S (2)...38 Obrázek 17 Schéma ADS-B...40 Obrázek 18 Ověřování polohových informací aktivními dotazy...41 Obrázek 19 Diagram: Počáteční určení polohy...44 Obrázek 20 Diagram: Průběh hybridního sledování...45 Obrázek 21 Poloha letadel...47 Obrázek 22 Graf: Počet dotazů a odpovědí v závislosti na formátu zprávy...49 Obrázek 23 Graf: Počet zpráv přenesených na frekvenci 1030 MHz a 1090 MHz
55 Seznam tabulek Tabulka 1 Časové vzdálenosti pulsů dotazu v módu C...13 Tabulka 2 Časové vzdálenosti pulsů odpovědi v módu C...13 Tabulka 3 Perioda vysílání (mód C)...16 Tabulka 4 Časové vzdálenosti pulsů dotazu v módu S...23 Tabulka 5 Časové vzdálenosti pulsů odpovědi v módu S...23 Tabulka 6 Formáty zpráv...25 Tabulka 7 Pole zpráv...27 Tabulka 8 Perioda monitorování okolního provozu...30 Tabulka 9 Perioda vysílání RA zprávy...30 Tabulka 10 Perioda vysílání zpráv (mód S)...35 Tabulka 11 Perioda vysílání zpráv UF/DF= Tabulka 12 Periody ES zpráv a frekvenční pásma, na kterých jsou odesílány...42 Tabulka 13 Periody a frekvenční pásma ověřovacích zpráv...43 Tabulka 14 Periody a frekvenční pásma ověřovacích zpráv v případě HROZBY...43 Tabulka 15 Informace o letadlech...47 Tabulka 16 Vzdálenosti mezi zadanými letadly...47 Tabulka 17 Zatížení odpovídače odpověďmi v módu C...50 Tabulka 18 Zatížení odpovídače odpověďmi v módu S
56 Seznam příloh Příloha 1 Vývojový diagram 55

57 Přílohy Příloha 1 V Příloze 1 je znázorněn vývojový diagram popisující postup sledování letadla narušitele vlastním letadlem. Sledování vlastního letadla narušitelem není z důvodu větší přehlednosti bráno v potaz. Ze stejného důvodu je předpokládáno, že vlastní letadlo na svůj dotaz vždy přijme bezchybnou odpověď a nemusí se tedy dotazovat opakovaně. 56
58 57
59 58
60 59
61 60
62 61
63 62
HLAVA 4 PALUBNÍ PROTISRÁŽKOVÉ SYSTÉMY
 HLAVA 4 PŘEDPIS L 10/IV HLAVA 4 PALUBNÍ PROTISRÁŽKOVÉ SYSTÉMY (Airborne Collision Avoidance System ACAS) Poznámka 1: Podkladový materiál, týkající se palubních protisrážkových systémů, je obsažen v ICAO
HLAVA 4 PŘEDPIS L 10/IV HLAVA 4 PALUBNÍ PROTISRÁŽKOVÉ SYSTÉMY (Airborne Collision Avoidance System ACAS) Poznámka 1: Podkladový materiál, týkající se palubních protisrážkových systémů, je obsažen v ICAO
KOMISE EVROPSKÝCH SPOLEČENSTVÍ. Návrh. NAŘÍZENÍ KOMISE (EU) č. /2010. ze dne [ ],
![KOMISE EVROPSKÝCH SPOLEČENSTVÍ. Návrh. NAŘÍZENÍ KOMISE (EU) č. /2010. ze dne [ ],](/thumbs/88/116648804.jpg "KOMISE EVROPSKÝCH SPOLEČENSTVÍ. Návrh. NAŘÍZENÍ KOMISE (EU) č. /2010. ze dne [ ],") KOMISE EVROPSKÝCH SPOLEČENSTVÍ V Bruselu dne XXX Návrh NAŘÍZENÍ KOMISE (EU) č. /2010 ze dne [ ], kterým se stanoví společné požadavky na užívání vzdušného prostoru a provozní postupy (Text s významem pro
KOMISE EVROPSKÝCH SPOLEČENSTVÍ V Bruselu dne XXX Návrh NAŘÍZENÍ KOMISE (EU) č. /2010 ze dne [ ], kterým se stanoví společné požadavky na užívání vzdušného prostoru a provozní postupy (Text s významem pro
PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV MINISTERSTVO DOPRAVY ČR
 MINISTERSTVO DOPRAVY ČR PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV Opatření Ministerstva dopravy č.j. 1285/2003-220-SP/1 ze dne 5.12.2003.
MINISTERSTVO DOPRAVY ČR PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV Opatření Ministerstva dopravy č.j. 1285/2003-220-SP/1 ze dne 5.12.2003.
VDL 4. Katedra radioelektroniky ČVUT FEL
 VDL 4 Dr. Ing. Pavel Kovář Katedra radioelektroniky ČVUT FEL VDL 4 Vlastnosti Přenos dat (připojení na ATN) Navržena pro podporu navigace letadel a pro zajištění přehledu o vzdušné situaci podporuje přenos
VDL 4 Dr. Ing. Pavel Kovář Katedra radioelektroniky ČVUT FEL VDL 4 Vlastnosti Přenos dat (připojení na ATN) Navržena pro podporu navigace letadel a pro zajištění přehledu o vzdušné situaci podporuje přenos
POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ
 RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
HLAVA 2 OBECNÁ USTANOVENÍ
 HLAVA 2 HLAVA 2 OBECNÁ USTANOVENÍ 2.1 Sekundární přehledový radar (SSR) 2.1.1 Je-li SSR instalován a provozován jako prostředek pro letecké provozní služby, musí vyhovovat ustanovením kap. 3.1, pokud není
HLAVA 2 HLAVA 2 OBECNÁ USTANOVENÍ 2.1 Sekundární přehledový radar (SSR) 2.1.1 Je-li SSR instalován a provozován jako prostředek pro letecké provozní služby, musí vyhovovat ustanovením kap. 3.1, pokud není
KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum Změna č. 2/ČR a Oprava č.
 Strana Datum Strana Datum Změna č. 2/ČR a Oprava č.") KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum i až v vi až vii viii až ix 1-1 / 1-2 1-3 až 1-5 1-6 až 1-8 1-9 až 1-10 1-11 1-12 1-13 / 1-14 a Oprava
KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum i až v vi až vii viii až ix 1-1 / 1-2 1-3 až 1-5 1-6 až 1-8 1-9 až 1-10 1-11 1-12 1-13 / 1-14 a Oprava
HLAVA 4 PALUBNÍ PROTISRÁŢKOVÉ SYSTÉMY
 HLAVA 4 PŘEDPIS L 10/IV HLAVA 4 PALUBNÍ PROTISRÁŢKOVÉ SYSTÉMY (Airborne Collision Avoidance System ACAS) Poznámka 1: Podkladový materiál, týkající se palubních protisrážkových systémů, je obsažen v ICAO
HLAVA 4 PŘEDPIS L 10/IV HLAVA 4 PALUBNÍ PROTISRÁŢKOVÉ SYSTÉMY (Airborne Collision Avoidance System ACAS) Poznámka 1: Podkladový materiál, týkající se palubních protisrážkových systémů, je obsažen v ICAO
HLAVA 3 SLEDOVACÍ SYSTÉMY
 HLAVA 3 PŘEDPIS L 10/IV HLAVA 3 SLEDOVACÍ SYSTÉMY 3.1 Charakteristiky systému sekundárního přehledového radaru (SSR) Poznámka 1: Odstavec 3.1.1 předepisuje technické charakteristiky systému SSR majícího
HLAVA 3 PŘEDPIS L 10/IV HLAVA 3 SLEDOVACÍ SYSTÉMY 3.1 Charakteristiky systému sekundárního přehledového radaru (SSR) Poznámka 1: Odstavec 3.1.1 předepisuje technické charakteristiky systému SSR majícího
ÚVODNÍ ČÁST PŘEDPIS L 8168
 ÚVODNÍ ČÁST PŘEDPIS L 8168 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH i ii iii ČÁST I LETOVÉ POSTUPY VŠEOBECNĚ I-1-1-1 Díl 1 Definice, zkratky a akronymy I-1-1-1
ÚVODNÍ ČÁST PŘEDPIS L 8168 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH i ii iii ČÁST I LETOVÉ POSTUPY VŠEOBECNĚ I-1-1-1 Díl 1 Definice, zkratky a akronymy I-1-1-1
ZÁKLADY DATOVÝCH KOMUNIKACÍ
 ZÁKLADY DATOVÝCH KOMUNIKACÍ Komunikační kanál (přenosová cesta) vždy negativně ovlivňuje přenášený signál (elektrický, světelný, rádiový). Nejčastěji způsobuje: útlum zeslabení, tedy zmenšení amplitudy
ZÁKLADY DATOVÝCH KOMUNIKACÍ Komunikační kanál (přenosová cesta) vždy negativně ovlivňuje přenášený signál (elektrický, světelný, rádiový). Nejčastěji způsobuje: útlum zeslabení, tedy zmenšení amplitudy
SEKVENČNÍ LOGICKÉ OBVODY
 Sekvenční logický obvod je elektronický obvod složený z logických členů. Sekvenční obvod se skládá ze dvou částí kombinační a paměťové. Abychom mohli určit hodnotu výstupní proměnné, je potřeba u sekvenčních
Sekvenční logický obvod je elektronický obvod složený z logických členů. Sekvenční obvod se skládá ze dvou částí kombinační a paměťové. Abychom mohli určit hodnotu výstupní proměnné, je potřeba u sekvenčních
Zvýšení bezpečnosti provozu na letištích. Honeywell Aerospace Advanced Technology June 2014
 Zvýšení bezpečnosti provozu na letištích Honeywell Aerospace Advanced Technology June 2014 Obsah prezentace 1. Bezpečnostní rizika provozu na letištích 2. Potenciální řešení 3. Současná řešení 4. Budoucí
Zvýšení bezpečnosti provozu na letištích Honeywell Aerospace Advanced Technology June 2014 Obsah prezentace 1. Bezpečnostní rizika provozu na letištích 2. Potenciální řešení 3. Současná řešení 4. Budoucí
Evropská agentura pro bezpečnost letectví
 Rozhodnutí výkonného ředitele č. 2011/001/R 23/03/2011 Evropská agentura pro bezpečnost letectví ROZHODNUTÍ č. 2011/001/R VÝKONNÉHO ŘEDITELE EVROPSKÉ AGENTURY PRO BEZPEČNOST LETECTVÍ ze dne 23. března
Rozhodnutí výkonného ředitele č. 2011/001/R 23/03/2011 Evropská agentura pro bezpečnost letectví ROZHODNUTÍ č. 2011/001/R VÝKONNÉHO ŘEDITELE EVROPSKÉ AGENTURY PRO BEZPEČNOST LETECTVÍ ze dne 23. března
KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum
 Strana Datum Strana Datum") KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum i / ii 23.11.2006 Změna č. 81 iii / iv 8.11.2018 v 10.11.2016
KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum i / ii 23.11.2006 Změna č. 81 iii / iv 8.11.2018 v 10.11.2016
PROTOKOL RDS. Dotaz na stav stanice " STAV CNC Informace o stavu CNC a radiové stanice FORMÁT JEDNOTLIVÝCH ZPRÁV
 PROTOKOL RDS Rádiový modem komunikuje s připojeným zařízením po sériové lince. Standardní protokol komunikace je jednoduchý. Data, která mají být sítí přenesena, je třeba opatřit hlavičkou a kontrolním
PROTOKOL RDS Rádiový modem komunikuje s připojeným zařízením po sériové lince. Standardní protokol komunikace je jednoduchý. Data, která mají být sítí přenesena, je třeba opatřit hlavičkou a kontrolním
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ. Mapování přehledové infrastruktury analýzou příjmu SSR odpovědí od letadla
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jakub Šíma Mapování přehledové infrastruktury analýzou příjmu SSR odpovědí od letadla Bakalářská práce 2016 3 Poděkování Rád bych poděkoval vedoucímu
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jakub Šíma Mapování přehledové infrastruktury analýzou příjmu SSR odpovědí od letadla Bakalářská práce 2016 3 Poděkování Rád bych poděkoval vedoucímu
N Á V R H. OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů
 N Á V R H OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad vydává podle 108 odst. 1 písm. b) zákona
N Á V R H OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad vydává podle 108 odst. 1 písm. b) zákona
14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE
 25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE Digitalizace obrazu a komprese dat. Uveďte bitovou rychlost nekomprimovaného číslicového TV signálu a jakou šířku vysílacího pásma by s dolním částečně
25. DIGITÁLNÍ TELEVIZNÍ SIGNÁL A KABELOVÁ TELEVIZE Digitalizace obrazu a komprese dat. Uveďte bitovou rychlost nekomprimovaného číslicového TV signálu a jakou šířku vysílacího pásma by s dolním částečně
3.3 Seznamte se s principem systému ADS-B a ovládáním přijímače odpovědí ADS-B Kinetic Avionic SBS-1.
 MRAR-L ZADÁNÍ Č. úlohy 3 Navigační systémy pro civilní letectví 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno - Tuřany. 3.3 Seznamte se s
MRAR-L ZADÁNÍ Č. úlohy 3 Navigační systémy pro civilní letectví 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno - Tuřany. 3.3 Seznamte se s
Změna č. 82
 HLAVA 12 PŘEDPIS L 10/III HLAVA 12 RADIOSTANICE S UNIVERZÁLNÍM PŘÍSTUPEM (UAT) 12.1 DEFINICE A CELKOVÁ CHARAKTERISTIKA SYSTÉMU 12.1.1 Definice Bod měření výkonu (PMP) (Power measurement point) Anténa je
HLAVA 12 PŘEDPIS L 10/III HLAVA 12 RADIOSTANICE S UNIVERZÁLNÍM PŘÍSTUPEM (UAT) 12.1 DEFINICE A CELKOVÁ CHARAKTERISTIKA SYSTÉMU 12.1.1 Definice Bod měření výkonu (PMP) (Power measurement point) Anténa je
PRACOVNÍ NÁVRH VYHLÁŠKA. ze dne o způsobu stanovení pokrytí signálem televizního vysílání
 PRACOVNÍ NÁVRH VYHLÁŠKA ze dne 2008 o způsobu stanovení pokrytí signálem televizního vysílání Český telekomunikační úřad stanoví podle 150 odst. 5 zákona č. 127/2005 Sb., o elektronických komunikacích
PRACOVNÍ NÁVRH VYHLÁŠKA ze dne 2008 o způsobu stanovení pokrytí signálem televizního vysílání Český telekomunikační úřad stanoví podle 150 odst. 5 zákona č. 127/2005 Sb., o elektronických komunikacích
5. A/Č převodník s postupnou aproximací
 5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
Letadlové radiolokátory MO. SRD Bezdrátové místní sítě Letadlové radiolokátory MO ISM MEZIDRUŽICOVÁ POHYBLIVÁ RADIOLOKAČNÍ
 59,3 61 Letadlové radiolokátory Bezdrátové místní sítě Letadlové radiolokátory 61 62 SRD Bezdrátové místní sítě Letadlové radiolokátory ISM SRD Bezdrátové místní sítě Letadlové radiolokátory ISM 62 64
59,3 61 Letadlové radiolokátory Bezdrátové místní sítě Letadlové radiolokátory 61 62 SRD Bezdrátové místní sítě Letadlové radiolokátory ISM SRD Bezdrátové místní sítě Letadlové radiolokátory ISM 62 64
PŘÍSTUPOVÉ METODY KE KOMUNIKAČNÍMU KANÁLU
 PŘÍSTUPOVÉ METODY KE KOMUNIKAČNÍMU KANÁLU Jedná se o pravidla zabezpečující, aby v jednom okamžiku vysílala informace prostřednictvím sdíleného komunikačního kanálu (kabel, vyhrazené frekvenční pásmo)
PŘÍSTUPOVÉ METODY KE KOMUNIKAČNÍMU KANÁLU Jedná se o pravidla zabezpečující, aby v jednom okamžiku vysílala informace prostřednictvím sdíleného komunikačního kanálu (kabel, vyhrazené frekvenční pásmo)
ZÁKLADY DATOVÝCH KOMUNIKACÍ
 ZÁKLADY DATOVÝCH KOMUNIKACÍ Komunikační kanál (přenosová cesta) vždy negativně ovlivňuje přenášený signál (elektrický, světelný, rádiový). Nejčastěji způsobuje: útlum zeslabení, tedy zmenšení amplitudy
ZÁKLADY DATOVÝCH KOMUNIKACÍ Komunikační kanál (přenosová cesta) vždy negativně ovlivňuje přenášený signál (elektrický, světelný, rádiový). Nejčastěji způsobuje: útlum zeslabení, tedy zmenšení amplitudy
DOPLNĚK 6 PŘEDPIS L 4444
 DOPLNĚK 6 PŘEDPIS L 4444 DOPLNĚK 6 DATOVÁ KOMUNIKACE MEZI ZAŘÍZENÍMI ATS (ATS INTERFACILITY DATA COMMUNICATIONS) AIDC 1. ÚVOD 1.1 Všeobecně 1.1.1 Tento Doplněk popisuje typy zpráv a jejich obsahy, které
DOPLNĚK 6 PŘEDPIS L 4444 DOPLNĚK 6 DATOVÁ KOMUNIKACE MEZI ZAŘÍZENÍMI ATS (ATS INTERFACILITY DATA COMMUNICATIONS) AIDC 1. ÚVOD 1.1 Všeobecně 1.1.1 Tento Doplněk popisuje typy zpráv a jejich obsahy, které
Sponzorem úlohy je společnost
 MRAR-L Č. úlohy 3 Navigační systémy pro civilní letectví Sponzorem úlohy je společnost ZADÁNÍ 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno
MRAR-L Č. úlohy 3 Navigační systémy pro civilní letectví Sponzorem úlohy je společnost ZADÁNÍ 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno
Obrazovkový monitor. Antonín Daněk. semestrální práce předmětu Elektrotechnika pro informatiky. Téma č. 7: princip, blokově základní obvody
 Obrazovkový monitor semestrální práce předmětu Elektrotechnika pro informatiky Antonín Daněk Téma č. 7: princip, blokově základní obvody Základní princip proud elektronů Jedná se o vakuovou elektronku.
Obrazovkový monitor semestrální práce předmětu Elektrotechnika pro informatiky Antonín Daněk Téma č. 7: princip, blokově základní obvody Základní princip proud elektronů Jedná se o vakuovou elektronku.
Geoinformační technologie
 Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS
 NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS Marcela Ujcová 1 Anotace: Článek popisuje prostorovou navigaci a využití multilateračních systémů
NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS Marcela Ujcová 1 Anotace: Článek popisuje prostorovou navigaci a využití multilateračních systémů
Základní komunikační řetězec
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA NA PROSEKU EVROPSKÝ SOCIÁLNÍ FOND Základní komunikační řetězec PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA NA PROSEKU EVROPSKÝ SOCIÁLNÍ FOND Základní komunikační řetězec PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL
Rádiové rozhraní GSM fáze 1
 Mobilní komunikace Semestrální práce Rádiové rozhraní GSM fáze 1 Martin Klinger 22.5.2007 V průběhu 80.let Evropa zaznamenává prudký nárůst analogových celuárních systémů, bohužel každá země provozuje
Mobilní komunikace Semestrální práce Rádiové rozhraní GSM fáze 1 Martin Klinger 22.5.2007 V průběhu 80.let Evropa zaznamenává prudký nárůst analogových celuárních systémů, bohužel každá země provozuje
ATN Datalink datové spojení mezi zemí a letadly. XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice Milan Soukup, ŘLP ČR
 ATN Datalink datové spojení mezi zemí a letadly 1 XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice 18.10.2017 Milan Soukup, ŘLP ČR Uživatelé datové komunikace mezi letadlem a pozemními systémy 2 Provozovatelé
ATN Datalink datové spojení mezi zemí a letadly 1 XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice 18.10.2017 Milan Soukup, ŘLP ČR Uživatelé datové komunikace mezi letadlem a pozemními systémy 2 Provozovatelé
íta ové sít baseband narrowband broadband
 Každý signál (diskrétní i analogový) vyžaduje pro přenos určitou šířku pásma: základní pásmo baseband pro přenos signálu s jednou frekvencí (není transponován do jiné frekvence) typicky LAN úzké pásmo
Každý signál (diskrétní i analogový) vyžaduje pro přenos určitou šířku pásma: základní pásmo baseband pro přenos signálu s jednou frekvencí (není transponován do jiné frekvence) typicky LAN úzké pásmo
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV POZEMNÍCH KOMUNIKACÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF ROAD STRUCTURES VYHLEDÁVACÍ STUDIE OBCHVATU OBCE OSTROMĚŘ
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV POZEMNÍCH KOMUNIKACÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF ROAD STRUCTURES VYHLEDÁVACÍ STUDIE OBCHVATU OBCE OSTROMĚŘ
PŘEVOD DAT Z PARALELNÍCH NA SÉRIOVÁ. 1. Seznamte se s deskou A/D P/S (paralelně/sériového) převodníku stavebnicového systému OPTEL.
 převodníku stavebnicového systému OPTEL.") PŘEVOD DAT Z PARALELNÍCH NA SÉRIOVÁ 103-4R 1. Seznamte se s deskou A/D P/S (paralelně/sériového) převodníku stavebnicového systému OPTEL. 2. Měřte jednotlivé kroky podle návodu. - propojení desek stavebnice
PŘEVOD DAT Z PARALELNÍCH NA SÉRIOVÁ 103-4R 1. Seznamte se s deskou A/D P/S (paralelně/sériového) převodníku stavebnicového systému OPTEL. 2. Měřte jednotlivé kroky podle návodu. - propojení desek stavebnice
Pokyny pro projektování zařízení ElZaS 21
 Počet stran: Počet příloh: Pokyny pro projektování zařízení ElZaS Verze programového vybavení: Procesory P a P., procesor přenosového řadiče -.0 Verze dokumentace:.0 Datum:.. 00 Zpracoval: Ing. Karel Beneš,
Počet stran: Počet příloh: Pokyny pro projektování zařízení ElZaS Verze programového vybavení: Procesory P a P., procesor přenosového řadiče -.0 Verze dokumentace:.0 Datum:.. 00 Zpracoval: Ing. Karel Beneš,
Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč
 Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč Ing. Jiří Valenta Ministerstvo dopravy Odbor civilního letectví RADIOKOMUNIKACE 2014 1 Letecké radiokomunikační služby Letecká
Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč Ing. Jiří Valenta Ministerstvo dopravy Odbor civilního letectví RADIOKOMUNIKACE 2014 1 Letecké radiokomunikační služby Letecká
MSSR-Monopulse Secondary Surveillance Radar
 MSSR-Monopulse Secondary Surveillance Radar Vadim Závodný Eldis Pardubice, sro. Pardubice, Czech Republic zavodny@eldis.cz Thank s to Ing. Dominik Kupčák for technical support 1 Přehled Rozdělení systémů
MSSR-Monopulse Secondary Surveillance Radar Vadim Závodný Eldis Pardubice, sro. Pardubice, Czech Republic zavodny@eldis.cz Thank s to Ing. Dominik Kupčák for technical support 1 Přehled Rozdělení systémů
ACARS Aircraft communiactions Addressing & Reporting System
 ACARS ACARS Aircraft communiactions Addressing & Reporting System Komunikační letadlový systém Tři hlavní datové linky: digitální komunikace určená pro řízení letového provozu ATC/ATS digitální přenos
ACARS ACARS Aircraft communiactions Addressing & Reporting System Komunikační letadlový systém Tři hlavní datové linky: digitální komunikace určená pro řízení letového provozu ATC/ATS digitální přenos
Pravidla a metodické pokyny pro zpracování a odevzdání bakalářské/diplomové práce
 Pravidla a metodické pokyny pro zpracování a odevzdání bakalářské/diplomové práce Vedoucí základních součástí (kateder/ústavů) jsou povinni seznámit studenta se všemi okolnostmi pro vypracování a odevzdání
Pravidla a metodické pokyny pro zpracování a odevzdání bakalářské/diplomové práce Vedoucí základních součástí (kateder/ústavů) jsou povinni seznámit studenta se všemi okolnostmi pro vypracování a odevzdání
EXTRAKT z české technické normy
 EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním ICS 35.240.60 materiálem o normě. Dopravní telematika Vyhrazené spojení krátkého rozsahu (DSRC) Datová
EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním ICS 35.240.60 materiálem o normě. Dopravní telematika Vyhrazené spojení krátkého rozsahu (DSRC) Datová
Hodnocení rizik v resortu Ministerstva obrany
 Hodnocení rizik v resortu Ministerstva obrany OBSAH Pojmy používané v procesu řízení rizik v MO Systém řízení rizik Proces řízení rizik Dokumenty systému řízení rizik Pojmy používané v procesu řízení rizik
Hodnocení rizik v resortu Ministerstva obrany OBSAH Pojmy používané v procesu řízení rizik v MO Systém řízení rizik Proces řízení rizik Dokumenty systému řízení rizik Pojmy používané v procesu řízení rizik
Problematika rušení meteorologických radarů ČHMÚ
 Problematika rušení meteorologických radarů ČHMÚ Ondřej Fibich, Petr Novák (zdrojová prezentace) Český Hydrometeorologický ústav, oddělení radarových měření Meteorologické radary využití - detekce srážkové
Problematika rušení meteorologických radarů ČHMÚ Ondřej Fibich, Petr Novák (zdrojová prezentace) Český Hydrometeorologický ústav, oddělení radarových měření Meteorologické radary využití - detekce srážkové
Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014
 MĚŘENÍ AKUSTICKÝCH VELIČIN Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014 Základní pojmy ZVUK Mechanické vlnění v látkovém prostředí, které je schopno vyvolat sluchový vjem. Frekvence
MĚŘENÍ AKUSTICKÝCH VELIČIN Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014 Základní pojmy ZVUK Mechanické vlnění v látkovém prostředí, které je schopno vyvolat sluchový vjem. Frekvence
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II
 Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
1. Základy teorie přenosu informací
 1. Základy teorie přenosu informací Úvodem citát o pojmu informace Informace je název pro obsah toho, co se vymění s vnějším světem, když se mu přizpůsobujeme a působíme na něj svým přizpůsobováním. N.
1. Základy teorie přenosu informací Úvodem citát o pojmu informace Informace je název pro obsah toho, co se vymění s vnějším světem, když se mu přizpůsobujeme a působíme na něj svým přizpůsobováním. N.
HLAVA 5 PŘEDPIS L 7030
 HLAVA 5 PŘEDPIS L 7030 HLAVA 5 PŘEHLED O PROVOZU (Předpis L 4444 - Hlava 8; Předpis L 8168, Část III) 5.1 Sekundární přehledový radar (SSR) 5.1.1 Vybavení SSR odpovídači se schopností hlásit tlakovou nadmořskou
HLAVA 5 PŘEDPIS L 7030 HLAVA 5 PŘEHLED O PROVOZU (Předpis L 4444 - Hlava 8; Předpis L 8168, Část III) 5.1 Sekundární přehledový radar (SSR) 5.1.1 Vybavení SSR odpovídači se schopností hlásit tlakovou nadmořskou
Komunikační protokol MODBUS RTU v displejích TDS
 Komunikační protokol MODBUS RTU v displejích TDS Kompletní popis protokolu 13. prosince 2018 w w w. p a p o u c h. c o m MODBUS RTU v TDS M O DBUS RTU v TDS Katalogový list Vytvořen: 6.4.2009 Poslední
Komunikační protokol MODBUS RTU v displejích TDS Kompletní popis protokolu 13. prosince 2018 w w w. p a p o u c h. c o m MODBUS RTU v TDS M O DBUS RTU v TDS Katalogový list Vytvořen: 6.4.2009 Poslední
21. DIGITÁLNÍ SÍŤ GSM
 21. DIGITÁLNÍ SÍŤ GSM Digitální síť GSM (globální systém pro mobilní komunikaci) je to celulární digitální radiotelefonní systém a byl uveden do provozu v roce 1991. V České republice byl systém spuštěn
21. DIGITÁLNÍ SÍŤ GSM Digitální síť GSM (globální systém pro mobilní komunikaci) je to celulární digitální radiotelefonní systém a byl uveden do provozu v roce 1991. V České republice byl systém spuštěn
Kódováni dat. Kódy používané pro strojové operace
 Kódováni dat Před zpracováním dat například v počítači je třeba znaky převést do tvaru, kterému počítač rozumí, tj. přiřadit jim určité kombinace bitů. Tomuto převodu se říká kódování. Kód je předpis pro
Kódováni dat Před zpracováním dat například v počítači je třeba znaky převést do tvaru, kterému počítač rozumí, tj. přiřadit jim určité kombinace bitů. Tomuto převodu se říká kódování. Kód je předpis pro
Informace a pokyny ke zpracování a odevzdání bakalářské práce (BP) na Katedře organické
 na Katedře organické") Informace a pokyny ke zpracování a odevzdání bakalářské práce (BP) na Katedře organické chemie (KOCH) 1) Zadání tématu bakalářské práce: Student je povinen vybrat si téma bakalářské práce a splnit všechny
Informace a pokyny ke zpracování a odevzdání bakalářské práce (BP) na Katedře organické chemie (KOCH) 1) Zadání tématu bakalářské práce: Student je povinen vybrat si téma bakalářské práce a splnit všechny
SPINEL. Komunikační protokol. Obecný popis. Verze 1.0
 SPINEL Komunikační protokol Obecný popis Verze 1.0 OBSAH Obsah... 2 OBECNÝ POPIS PROTOKOLU SPINEL... 3 Obecný formát rámce pro ASCII kódování... 3 Obecný formát dat pro binární kódování... 3 Definované
SPINEL Komunikační protokol Obecný popis Verze 1.0 OBSAH Obsah... 2 OBECNÝ POPIS PROTOKOLU SPINEL... 3 Obecný formát rámce pro ASCII kódování... 3 Obecný formát dat pro binární kódování... 3 Definované
Počítačové sítě Datový spoj
 (Data Link) organizovaný komunikační kanál Datové jednotky rámce(frames) indikátory začátku a konce rámce režijní informace záhlaví event. zápatí rámce (identifikátor zdroje a cíle, řídící informace, informace
(Data Link) organizovaný komunikační kanál Datové jednotky rámce(frames) indikátory začátku a konce rámce režijní informace záhlaví event. zápatí rámce (identifikátor zdroje a cíle, řídící informace, informace
Zvuk. 1. základní kmitání. 2. šíření zvuku
 Zvuk 1. základní kmitání - vzduchem se šíří tlakové vzruchy (vzruchová vlna), zvuk je systémem zhuštěnin a zředěnin - podstatou zvuku je kmitání zdroje zvuku a tím způsobené podélné vlnění elastického
Zvuk 1. základní kmitání - vzduchem se šíří tlakové vzruchy (vzruchová vlna), zvuk je systémem zhuštěnin a zředěnin - podstatou zvuku je kmitání zdroje zvuku a tím způsobené podélné vlnění elastického
Ve FIRu se nacházejí další řízené a neřízené prostory (CTR, TMA, CTA, ATZ, TSA, TRA, D, P, R).
.") Â Vzdušný prostor se označuje jako letová informační oblast (Flight information region FIR). V České republice máme jen jeden FIR a to FIR Praha, který sahá vertikálně od GND do FL660 a horizontálně kopíruje
 Vzdušný prostor se označuje jako letová informační oblast (Flight information region FIR). V České republice máme jen jeden FIR a to FIR Praha, který sahá vertikálně od GND do FL660 a horizontálně kopíruje
ČÁST I DÍL 4 - HLAVA 8 PŘEDPIS L 8168
 HLAVA 8 ZOBRAZENÍ V MAPÁCH/LETECKÁ INFORMAČNÍ PŘÍRUČKA (AIP) 8.1 VŠEOBECNĚ Materiál týkající se publikování map je obsažen v předpisu L 4 následovně: a) Mapa standardních přístrojových příletových tratí
HLAVA 8 ZOBRAZENÍ V MAPÁCH/LETECKÁ INFORMAČNÍ PŘÍRUČKA (AIP) 8.1 VŠEOBECNĚ Materiál týkající se publikování map je obsažen v předpisu L 4 následovně: a) Mapa standardních přístrojových příletových tratí
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta informačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta informačních technologií Autor: Tomáš Válek, xvalek02@stud.fit.vutbr.cz Login: xvalek02 Datum: 21.listopadu 2012 Obsah 1 Úvod do rozhraní I 2 C (IIC) 1 2 Popis funkčnosti
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta informačních technologií Autor: Tomáš Válek, xvalek02@stud.fit.vutbr.cz Login: xvalek02 Datum: 21.listopadu 2012 Obsah 1 Úvod do rozhraní I 2 C (IIC) 1 2 Popis funkčnosti
Relační DB struktury sloužící k optimalizaci dotazů - indexy, clustery, indexem organizované tabulky
 Otázka 20 A7B36DBS Zadání... 1 Slovníček pojmů... 1 Relační DB struktury sloužící k optimalizaci dotazů - indexy, clustery, indexem organizované tabulky... 1 Zadání Relační DB struktury sloužící k optimalizaci
Otázka 20 A7B36DBS Zadání... 1 Slovníček pojmů... 1 Relační DB struktury sloužící k optimalizaci dotazů - indexy, clustery, indexem organizované tabulky... 1 Zadání Relační DB struktury sloužící k optimalizaci
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY VÍCEÚČELOVÁ SPORTOVNÍ HALA MULTI-FUNCTION SPORTS HALL
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES VÍCEÚČELOVÁ SPORTOVNÍ
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES VÍCEÚČELOVÁ SPORTOVNÍ
Základy a aplikace digitálních. Katedra radioelektroniky (13137), blok B2, místnost 722
, blok B2, místnost 722") Základy a aplikace digitálních modulací Josef Dobeš Katedra radioelektroniky (13137), blok B2, místnost 722 dobes@fel.cvut.cz 6. října 2014 České vysoké učení technické v Praze, Fakulta elektrotechnická
Základy a aplikace digitálních modulací Josef Dobeš Katedra radioelektroniky (13137), blok B2, místnost 722 dobes@fel.cvut.cz 6. října 2014 České vysoké učení technické v Praze, Fakulta elektrotechnická
BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE SAMONASÁVACÍ ČERPADLO SELF-PRIMING PUMP DIPLOMOVÁ
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE SAMONASÁVACÍ ČERPADLO SELF-PRIMING PUMP DIPLOMOVÁ
ČÁST I DÍL 6 - HLAVA 1 PŘEDPIS L 8168
 ČÁST I DÍL 6 - HLAVA 1 PŘEDPIS L 8168 DÍL 6 POSTUPY VYČKÁVÁNÍ HLAVA 1 KRITÉRIA VYČKÁVÁNÍ 1.1 VŠEOBECNĚ 1.1.1 Aby bylo zajištěno, že letadlo zůstane v ochranných prostorech vyčkávání, musí pilot použít
ČÁST I DÍL 6 - HLAVA 1 PŘEDPIS L 8168 DÍL 6 POSTUPY VYČKÁVÁNÍ HLAVA 1 KRITÉRIA VYČKÁVÁNÍ 1.1 VŠEOBECNĚ 1.1.1 Aby bylo zajištěno, že letadlo zůstane v ochranných prostorech vyčkávání, musí pilot použít
KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum
 Strana Datum Strana Datum") KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum i 12.10.2017 Změny č. 4/ČR a 5/ČR Dod. 5-1 až Dod. 5-4 4.12.2014 iii 4.12.2014 Dopl. A - 1 až Dopl. A - 4 4.12.2014 v 29.3.2018
KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum i 12.10.2017 Změny č. 4/ČR a 5/ČR Dod. 5-1 až Dod. 5-4 4.12.2014 iii 4.12.2014 Dopl. A - 1 až Dopl. A - 4 4.12.2014 v 29.3.2018
TCAS jako prostředek ke zvýšení bezpečnosti letového provozu
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta dopravní Ústav letecké dopravy TCAS jako prostředek ke zvýšení bezpečnosti letového provozu TCAS as a way to improve air traffic safety Diplomová práce Studijní
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta dopravní Ústav letecké dopravy TCAS jako prostředek ke zvýšení bezpečnosti letového provozu TCAS as a way to improve air traffic safety Diplomová práce Studijní
PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU)
") 23.11.2011 Úřední věstník Evropské unie L 305/35 PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) č. 1207/2011 ze dne 22. listopadu 2011, kterým se stanoví požadavky na výkonnost a interoperabilitu přehledu v jednotném
23.11.2011 Úřední věstník Evropské unie L 305/35 PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) č. 1207/2011 ze dne 22. listopadu 2011, kterým se stanoví požadavky na výkonnost a interoperabilitu přehledu v jednotném
ENR-1 VZDUŠNÝ PROSTOR ČESKÉ REPUBLIKY
 25 MAY 17 (1) Vzdušný prostor VFR-ENR-1-1 ENR-1 VZDUŠNÝ PROSTOR ČESKÉ REPUBLIKY 1.1 Rozdělení vzdušného prostoru 1.1.1 Vzdušné prostory ATS 1.1.1.1 Vzdušný prostor ČR je ve vztahu k rozsahu ATS, poskytovaných
25 MAY 17 (1) Vzdušný prostor VFR-ENR-1-1 ENR-1 VZDUŠNÝ PROSTOR ČESKÉ REPUBLIKY 1.1 Rozdělení vzdušného prostoru 1.1.1 Vzdušné prostory ATS 1.1.1.1 Vzdušný prostor ČR je ve vztahu k rozsahu ATS, poskytovaných
ze dne 18. října 2010 k nařízení Komise (EU) č. XX/2010, kterým se stanoví společné požadavky na užívání vzdušného prostoru a provozní postupy
 č. XX/2010, kterým se stanoví společné požadavky na užívání vzdušného prostoru a provozní postupy") Evropská agentura pro bezpečnost letectví 18. října 2010 STANOVISKO Č. 05/2010 EVROPSKÉ AGENTURY PRO BEZPEČNOST LETECTVÍ ze dne 18. října 2010 k nařízení Komise (EU) č. XX/2010, kterým se stanoví společné
Evropská agentura pro bezpečnost letectví 18. října 2010 STANOVISKO Č. 05/2010 EVROPSKÉ AGENTURY PRO BEZPEČNOST LETECTVÍ ze dne 18. října 2010 k nařízení Komise (EU) č. XX/2010, kterým se stanoví společné
Mechanické kmitání a vlnění
 Mechanické kmitání a vlnění Pohyb tělesa, který se v určitém časovém intervalu pravidelně opakuje periodický pohyb S kmitavým pohybem se setkáváme např.: Zařízení, které volně kmitá, nazýváme mechanický
Mechanické kmitání a vlnění Pohyb tělesa, který se v určitém časovém intervalu pravidelně opakuje periodický pohyb S kmitavým pohybem se setkáváme např.: Zařízení, které volně kmitá, nazýváme mechanický
Vypracoval: Ing. Antonín POPELKA. Datum: 30. června 2005. Revize 01
 Popis systému Revize 01 Založeno 1990 Vypracoval: Ing. Antonín POPELKA Datum: 30. června 2005 SYSTÉM FÁZOROVÝCH MĚŘENÍ FOTEL Systém FOTEL byl vyvinut pro zjišťování fázových poměrů mezi libovolnými body
Popis systému Revize 01 Založeno 1990 Vypracoval: Ing. Antonín POPELKA Datum: 30. června 2005 SYSTÉM FÁZOROVÝCH MĚŘENÍ FOTEL Systém FOTEL byl vyvinut pro zjišťování fázových poměrů mezi libovolnými body
KOMBINAČNÍ LOGICKÉ OBVODY
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 KOMBINAČNÍ LOGICKÉ OBVODY U těchto obvodů je vstup určen jen výhradně kombinací vstupních veličin. Hodnoty
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 KOMBINAČNÍ LOGICKÉ OBVODY U těchto obvodů je vstup určen jen výhradně kombinací vstupních veličin. Hodnoty
Pokyny pro vypracování bakalářských, diplomových a rigorózních prací na Přírodovědecké fakultě MU
 Opatření děkana Přírodovědecké fakulty Masarykovy univerzity č. 12 / 2018 Pokyny pro vypracování bakalářských, diplomových a rigorózních prací na Přírodovědecké fakultě MU (ve znění účinném od 15.12.2018)
Opatření děkana Přírodovědecké fakulty Masarykovy univerzity č. 12 / 2018 Pokyny pro vypracování bakalářských, diplomových a rigorózních prací na Přírodovědecké fakultě MU (ve znění účinném od 15.12.2018)
7. Funkce jedné reálné proměnné, základní pojmy
 , základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
, základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
NOSNÁ KONSTRUKCE ZASTŘEŠENÍ FOTBALOVÉ TRIBUNY STEEL STRUCTURE OF FOOTBAL GRANDSTAND
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES NOSNÁ KONSTRUKCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES NOSNÁ KONSTRUKCE
Osnova. Idea ASK/FSK/PSK ASK Amplitudové... Strana 1 z 16. Celá obrazovka. Konec Základy radiotechniky
 Pulsní kódová modulace, amplitudové, frekvenční a fázové kĺıčování Josef Dobeš 24. října 2006 Strana 1 z 16 Základy radiotechniky 1. Pulsní modulace Strana 2 z 16 Pulsní šířková modulace (PWM) PAM, PPM,
Pulsní kódová modulace, amplitudové, frekvenční a fázové kĺıčování Josef Dobeš 24. října 2006 Strana 1 z 16 Základy radiotechniky 1. Pulsní modulace Strana 2 z 16 Pulsní šířková modulace (PWM) PAM, PPM,
DALImiw30. Uživatelský manuál. Pohybový senzor do 2,6 metrů Senzor pro měření osvětlení Regulace na konstantní osvětlení.
 Uživatelský manuál verze dokumentu 2.0 pro DALImiw30 od verze firmware 1.6 a hardware 4.0 DALImiw30 Pohybový senzor do 2,6 metrů Senzor pro měření osvětlení Regulace na konstantní osvětlení Rozsah 0-1000
Uživatelský manuál verze dokumentu 2.0 pro DALImiw30 od verze firmware 1.6 a hardware 4.0 DALImiw30 Pohybový senzor do 2,6 metrů Senzor pro měření osvětlení Regulace na konstantní osvětlení Rozsah 0-1000
Digitální modulace. Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
 EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206 Modulace analogových modulací modulační i
EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206 Modulace analogových modulací modulační i
ZÁVĚREČNÁ ZPRÁVA. Praha Leden 2019
 ÚSTAV PRO ODBORNÉ ZJIŠŤOVÁNÍ PŘÍČIN LETECKÝCH NEHOD Beranových 130 199 01 PRAHA 99 CZ-17-0472 ZÁVĚREČNÁ ZPRÁVA o odborném zjišťování příčin vážného incidentu - narušení schopnosti poskytovat bezpečné služby
ÚSTAV PRO ODBORNÉ ZJIŠŤOVÁNÍ PŘÍČIN LETECKÝCH NEHOD Beranových 130 199 01 PRAHA 99 CZ-17-0472 ZÁVĚREČNÁ ZPRÁVA o odborném zjišťování příčin vážného incidentu - narušení schopnosti poskytovat bezpečné služby
MĚŘENÍ AKUSTICKÝCH VELIČIN. Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014
 MĚŘENÍ AKUSTICKÝCH VELIČIN Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014 TERMÍNY A DEFINICE MÍSTO PŘÍJMU Místo ve kterém je hluk posuzován ČASOVÝ INTERVAL MĚŘENÍ Časový interval
MĚŘENÍ AKUSTICKÝCH VELIČIN Ing. Barbora Hrubá, Ing. Jiří Winkler Kat. 225 Pozemní stavitelství 2014 TERMÍNY A DEFINICE MÍSTO PŘÍJMU Místo ve kterém je hluk posuzován ČASOVÝ INTERVAL MĚŘENÍ Časový interval
Primární zpracování radarového signálu dopplerovská filtrace
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE K13137 - Katedra radioelektroniky A2M37RSY Jméno Stud. rok Stud. skupina Ročník Lab. skupina Václav Dajčar 2011/2012 2. 101 - Datum zadání Datum odevzdání Klasifikace
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE K13137 - Katedra radioelektroniky A2M37RSY Jméno Stud. rok Stud. skupina Ročník Lab. skupina Václav Dajčar 2011/2012 2. 101 - Datum zadání Datum odevzdání Klasifikace
Základní principy konstrukce systémové sběrnice - shrnutí. Shrnout základní principy konstrukce a fungování systémových sběrnic.
 Základní principy konstrukce systémové sběrnice - shrnutí Shrnout základní principy konstrukce a fungování systémových sběrnic. 1 Co je to systémová sběrnice? Systémová sběrnice je prostředek sloužící
Základní principy konstrukce systémové sběrnice - shrnutí Shrnout základní principy konstrukce a fungování systémových sběrnic. 1 Co je to systémová sběrnice? Systémová sběrnice je prostředek sloužící
Světelné scény a jejich řízení systémovou instalací ABB i- bus KNX Ing. Josef Kunc
 Světelné scény a jejich řízení systémovou instalací ABB i- bus KNX Ing. Josef Kunc Světelnými scénami nazýváme kombinace provozních stavů různých spotřebičů. Vzhledem k tomu, že dříve bývaly takovéto kombinace
Světelné scény a jejich řízení systémovou instalací ABB i- bus KNX Ing. Josef Kunc Světelnými scénami nazýváme kombinace provozních stavů různých spotřebičů. Vzhledem k tomu, že dříve bývaly takovéto kombinace
Použití UART a radia na platformě micro:bit
 Použití UART a radia na platformě micro:bit Jakub Vodsed álek Katedra měření Fakulta elektrotechnická České vysoké učení v Praze 25. června 2017 Obsah 1 Úvod 2 UART UART - úvod UART - výstup Prostý výpis
Použití UART a radia na platformě micro:bit Jakub Vodsed álek Katedra měření Fakulta elektrotechnická České vysoké učení v Praze 25. června 2017 Obsah 1 Úvod 2 UART UART - úvod UART - výstup Prostý výpis
Nouzový polohový radiomaják. ELT Ameri King AK- 451
 Doplněk č. 13.3 Nouzový polohový radiomaják ELT Ameri King AK- 451 Poznávací značka OK - PLH Výrobní číslo 170722 Tento doplněk musí být připojen ke schválené Letové příručce letounu, jestliže je na něm
Doplněk č. 13.3 Nouzový polohový radiomaják ELT Ameri King AK- 451 Poznávací značka OK - PLH Výrobní číslo 170722 Tento doplněk musí být připojen ke schválené Letové příručce letounu, jestliže je na něm
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY ZASTŘEŠENÍ SPORTOVNÍHO OBJEKTU THE ROOFING OF THE SPORT HALL ÚVODNÍ LISTY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES ZASTŘEŠENÍ SPORTOVNÍHO
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DŘEVĚNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES ZASTŘEŠENÍ SPORTOVNÍHO
Příloha č. 1. amplitudová charakteristika filtru fázová charakteristika filtru / frekvence / Hz. 1. Určení proudové hustoty
 Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Ing. Jiří Fejfar, Ph.D. GNSS. Globální navigační satelitní systémy
 Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
Inovace a zkvalitnění výuky směřující k rozvoji odborných kompetencí žáků středních škol
 Inovace a zkvalitnění výuky směřující k rozvoji odborných kompetencí žáků středních škol CZ.1.07/1.5.00/34.0452 Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0452 OV_1_23_měření DVB-T s
Inovace a zkvalitnění výuky směřující k rozvoji odborných kompetencí žáků středních škol CZ.1.07/1.5.00/34.0452 Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0452 OV_1_23_měření DVB-T s
PB169 Operační systémy a sítě
 PB169 Operační systémy a sítě Řízení přístupu k médiu, MAC Marek Kumpošt, Zdeněk Říha Řízení přístupu k médiu Více zařízení sdílí jednu komunikační linku Zařízení chtějí nezávisle komunikovat a posílat
PB169 Operační systémy a sítě Řízení přístupu k médiu, MAC Marek Kumpošt, Zdeněk Říha Řízení přístupu k médiu Více zařízení sdílí jednu komunikační linku Zařízení chtějí nezávisle komunikovat a posílat
Typy a použití klopných obvodů
 Typy a použití klopných obvodů Klopné obvody s hodinovým vstupem mění svůj stav, pokud hodinový vstup má hodnotu =. Přidáním invertoru před hodinový vstup je lze upravit tak, že budou měnit svůj stav tehdy,
Typy a použití klopných obvodů Klopné obvody s hodinovým vstupem mění svůj stav, pokud hodinový vstup má hodnotu =. Přidáním invertoru před hodinový vstup je lze upravit tak, že budou měnit svůj stav tehdy,
VY_32_INOVACE_E 15 03
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Měření eurobalíz ETCS aneb využití MATLABu pro automatizaci měření
 Zkušební laboratoř Fakulty dopravní ČVUT v Praze Měření eurobalíz ETCS aneb využití MATLABu pro automatizaci měření 8. 9. 2016, Brno Ing. Jindřich Sadil, Ph.D. Ing. Dušan Kamenický Činnosti Fakulty dopravní
Zkušební laboratoř Fakulty dopravní ČVUT v Praze Měření eurobalíz ETCS aneb využití MATLABu pro automatizaci měření 8. 9. 2016, Brno Ing. Jindřich Sadil, Ph.D. Ing. Dušan Kamenický Činnosti Fakulty dopravní
KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum. i až vi 4.12.2014 Dod. 5-1 až Dod. 5-4 4.12.2014
 Strana Datum Strana Datum. i až vi 4.12.2014 Dod. 5-1 až Dod. 5-4 4.12.2014") KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum i až vi 4.12.2014 Dod. 5-1 až Dod. 5-4 4.12.2014 vii / viii 5.4.2015 Dopl. A - 1 až Dopl. A - 4 4.12.2014 Změna č. 1/ČR 1-1
KONTROLNÍ SEZNAM STRAN PŘEDPIS PRAVIDLA LÉTÁNÍ (L 2) Strana Datum Strana Datum i až vi 4.12.2014 Dod. 5-1 až Dod. 5-4 4.12.2014 vii / viii 5.4.2015 Dopl. A - 1 až Dopl. A - 4 4.12.2014 Změna č. 1/ČR 1-1
Zdroje dat GIS. Digitální formy tištěných map. Vstup dat do GISu:
 Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Tester chybovosti 4xSTM-1
 Tester chybovosti 4xSTM-1 Technická dokumentace Ústav radioelektroniky FEKT VUT v Brně 2008 Základní parametry Tester slouží k monitorování bitové chybovosti čtyř linek STM-1 (155,52 Mb/s) v jednom směru.
Tester chybovosti 4xSTM-1 Technická dokumentace Ústav radioelektroniky FEKT VUT v Brně 2008 Základní parametry Tester slouží k monitorování bitové chybovosti čtyř linek STM-1 (155,52 Mb/s) v jednom směru.
Směrnice. Záměrná a standardní ochrana osobních údajů. Platnost a účinnost od: Mgr. Milan KRÁL
 Směrnice Záměrná a standardní ochrana osobních údajů Platnost a účinnost od: 24.5. 2018 Vydal: Mgr. Milan KRÁL 1 OBSAH 1 Úvod... 5 1.1 Úvodní ustanovení... 5 1.2 Rozsah působnosti... 5 1.3 Odpovědnost
Směrnice Záměrná a standardní ochrana osobních údajů Platnost a účinnost od: 24.5. 2018 Vydal: Mgr. Milan KRÁL 1 OBSAH 1 Úvod... 5 1.1 Úvodní ustanovení... 5 1.2 Rozsah působnosti... 5 1.3 Odpovědnost
Manuál pro práci s modulem Otázky a odpovědi
 Manuál pro práci s modulem Otázky a odpovědi Užitečné postupy a doporučení Obsah 1 Role uživatelů...3 2 Odesílání otázek...3 3 Přehled otázek...4 3.1 Orientace v přehledu...4 3.2 Základní údaje otázky...5
Manuál pro práci s modulem Otázky a odpovědi Užitečné postupy a doporučení Obsah 1 Role uživatelů...3 2 Odesílání otázek...3 3 Přehled otázek...4 3.1 Orientace v přehledu...4 3.2 Základní údaje otázky...5