Pohony s krokovými motorky
|
|
|
- Štefan Brož
- před 8 lety
- Počet zobrazení:
Transkript
1 Pohony s krokovými motorky V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost setkat se s nimi u různých typů tiskáren, zapisovačů a elektrických posuvných zařízení, pozadu nezůstává ale i oblast regulační a řídicí techniky, kde se využívají spolu s převodovkou na změnu mechanických poloh ventilů, směšovačů, posuvy X a Y malých NC strojů aj. Krokový motor je nejjednodušším akčním členem pro převádění digitálního signálu na polohu úhel natočení rotoru. V principu si můžeme krokový motor představit jako synchronní stroj, v němž místo točivého pole, generovaného třífázovým sinusovým napájecím napětím statorového vinutí, je generováno "poskakující" magnetické pole postupným napájením jednotlivých pólových dvojic stejnosměrným proudem Počet stabilních poloh rotoru je pak dán počtem kroků motoru na jednu otáčku. Rozdělení krokových motorků Krokové motorky je možné podle jejich konstrukčního provedení rozdělit do tří základních skupin: Krokové motorky s pasivním rotorem, označované také jako reluktanční, reakční, s proměnnou reluktancí. Jsou to motorky s vyjádřenými póly na statoru i rotoru, využívající výrazně rozdílné magnetické reluktance (vodivosti) v příčné i podélné ose. Podmínkou funkce je rozdílný počet pólů (zubů) na statoru a rotoru. Krokové motorky s aktivním rotorem, jejichž rotor je tvořen permanentním magnetem (odtud i název aktivní). Podle uspořádání pólů magnetu odlišujeme dvě skupiny těchto motorků,s radiálně polarizovaným nebo s axiálně polarizovaným permanentním magnetem. Mají rozdílný počet pólů na statoru i rotoru, přičemž rotorové póly jsou tvořeny permanentními magnety. Krokové motorky hybridní slučují konstrukční principy obou předchozích typů Obr. 1. Magnetický obvod krokového motorku s pasivním rotorem
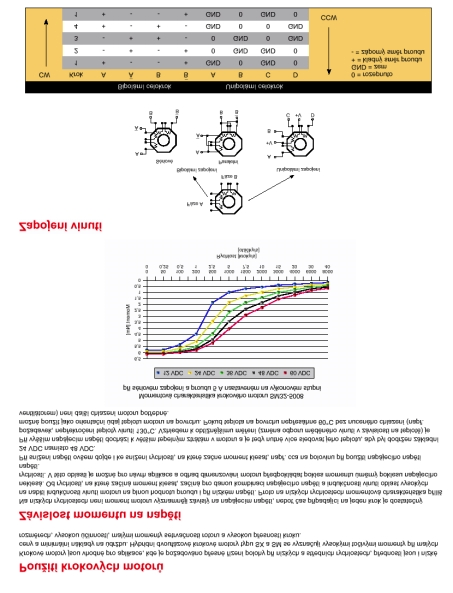
2 Princip činnosti krokových motorků Funkce krokového motorku bude vysvětlena pro čtyřfázový motor s pasivním rotorem. Řez magnetickým obvodem tohoto motorku je na obr. 1. Na statoru je 8 zubů spojených jhem. Na každém zubu je cívka vinutí. Dvojice cívek navinutých na protilehlých zubech jsou spojeny a tvoří vždy jednu fázi. Celkem máme 4 fáze - označeny A, B, C, D. Rotor má na svém povrchu směrem do vzduchové mezery 6 zubů a je bez vinutí. Šířka rotorových a statorových zubů je ve. vzduchové mezeře stejná. Fáze vinutí jsou připojeny na výstupy ovladače. Ovladač řídí (přes spínací koncové prvky) buzení jednotlivých fázi vinutí v určitém pořadí (podle určitého způsobu řízení), v rytmu řídicích impulsů. V případě, že je fáze vinutí buzena, protéká příslušným vinutím budicí stejnosměrný proud. Obr. 2. Znázornění pohybu rotoru krokového motorku s pasivním rotorem v závislosti na přepínání buzení jednotlivých fází vinutí Na obr. 2 je znázorněna situace před připojením pohonu k napájecímu zdroji. Rotor se nachází v jedné z možných náhodných poloh, která je dána zbytkovým (remanentním) magnetismem rotoru. Předpokládejme, že první kombinace sepnutí fází bude (1, 0, 0, 0), což odpovídá tomu, že fázi A teče proud, kdežto fázemi B, C, D proud neteče. Tento stav je na obr. 2a. Je vidět, že rotor se pootočí tak, aby zaujal stav minimální reluktance (minimálního magnetického odporu). Jev lze popsat také tak, že se proti statorovým pólům, které jsou buzeny (nyní pod fázi A), nastavily nejbližší rotorové zuby do souhlasné polohy. Rotor se tak nachází do doby další změny kombinace sepnutí fází v magnetické klidové poloze. Upozorněme nyní na jiný počet zubů rotoru a statoru (uvedeno výše), dochází k tomu, že se rotorové zuby nekryjí se statorovými postupně o 1/4, 1/2, 3/4 rotorové zubové rozteče. Změníme-li nyní kombinaci buzení fází z (1, 0, 0, 0) na (0, 1, 0, 0), tj. bude buzena pouze fáze B, rotor se bude snažit zaujmout takovou polohu, aby protékal maximální magnetický tok
3 (stav minimální reluktance)- rotor se pootočí skokem vlevo (o jeden krok). V našem případě se rotor pootočí o 1/4 zubové rozteče. Stav motoru je znázorněn nyní na obr. 2b. Při další změně kombinace buzení na stav (0, 0, 1, 0) se pootočí magnetické pole do osy statorových zubů fáze C a rotor se pootočí obdobným způsobem do nové magnetické klidové polohy, která je nyní zobrazena na obr.2c. Krokování motorku neprobíhá skokovou změnou, nýbrž podle obr. 3. Obr. 3. Znázornění pohybu rotoru krokového motorku během jednoho kroku v závislosti na čase Rotor nejprve překývne a teprve potom se ustálí v klidové poloze. Velikost překmitu a časové ustálení kmitů rotoru závisi na momentu setrvačnosti poháněného zařízení. Dalším řídicím impulsem se změní fáze na (0, 0, 0, 1) a rotor se opět otočí o 1 krok podle obr.2d. Následujícím řídicím impulsem se nastaví kombinace buzení fází (1, 0, 0, 0), která odpovídá výchozí situaci a děj se cyklicky opakuje. Pro uvažovaný druh dosahujeme velikost kroku: 2π Φ = m N kde m je počet fází vinutí statoru a N je počet zubů rotoru. Pro výše uvedený krokový motor 0 (viz. obr.2) je m = 4 a N = 6 odpovídá krok Φ =15 a motor tedy vykoná 24 kroků za jednu otáčku. Zvětšení počtu kroků je možné zvětšením počtu zubů rotoru, např. konstrukcí rotoru a pólových nástavců podle obr. 4. Krokový motor podle obr. 5 má opět čtyřfázový stator, tj. 8 pólů, každý pólový nástavec má 3 zuby. Na statoru je tedy 24 zubů, rotor má 30 zubů, pootočení rotoru o jeden krok je: Φ = = Krokový motor tedy vykoná 120 kroků na jednu otáčku.
4 Obr. 4. Princip zvětšení počtu kroků reluktančního krokového motoru Obr. 5. Průběhy proudu při různých způsobech ovládání a) čtyřtaktní po jedné fázi, b) čtyřtaktní po dvou fázích, c) osmitaktní Časový průběh buzení fází našeho čtyřfázového motorku v závislosti na řídicím impulsu je na
5 obr. 5a. Je vidět, že v každé periodě řídicího signálu je magnetické pole buzeno pouze jednou ze čtyř fází vinutí.druhý způsob řízení krokového motorku je zobrazen na obr. 5b. Při tomto způsobu řízení se budí současně vždy dvě blízké fáze: (1, 0, 0, 1), (1, 1, 0, 0), (0, 1, 1, 0), (0, 0, 1, 1). Tímto způsobem řízení se realizuje stejná velikost kroku v předchozím příkladě, neboť se pouze změní klidová magnetická poloha, která je mezi statorovými póly. Nevýhodou tohoto způsobu řízeni je dvojnásobná proudová a tím i výkonová náročnost, která má za následek větší oteplení motoru. Výhodou je zvětšení statického momentu motoru, který je v porovnání s předchozím způsobem buzení asi dvakrát větší. Oběma dosud uvedeným způsobům řízení říkáme "čtyřtaktní", protože se v nich střídají dokola čtyři možné kombinace. Třetí způsob řízení vznikne sloučením prvního a druhého způsobu řízení tak, že vložíme mezi kombinace jednofázové kombinace dvoufázové a vznikne tak "osmitaktní" způsob řízení. Časový průběh osmitaktního řízení vidíme na obr. 5c. Výhoda tohoto způsobu řízení je v tom, že zmenšíme základní velikost kroku na polovinu a získáme tak větší,úhlové rozlišení. Protože se střídá při řízení zapojení jedné a dvou fází motorku, nutně se nám i v tomto rytmu mění velikost provozního momentu motorku, takže celkový výsledný moment bude menší než v případě čtyřtaktniho řízení po dvou fázích. Mikrokrokování Plná délka kroku krokového motoru může být rozdělena do menších inkrementů pohybu rotoru, tento režim se nazývá mikrokrokování, respektive drobení kroku (mikrostepping, mini-steps). Budeme -li v jedné fázi postupně snižovat hodnotu budícího proudu a v sousední fázi hodnotu proudu zvyšovat, bude se výsledný vektor magnetické indukce pohybovat mezi krajními polohami, danými vybuzením jednotlivých fází. Pro dvoufázový hybridní motor je pro jeden plný krok motoru požadována rotace magnetického pole o 90 elektrických. Uvažujeme - li dále moment motoru, měnící se sinusově s polohou rotoru a mezní vazební moment úměrný proudu fází, můžeme napsat rovnice: M A = k i sin( N Φ) T A M B = k i sin( N T B Φ π ) 2 kde k T je konstrukční konstanta motorku a i A a i B proudy v jednotlivých fázích. Při provozu s plnou délkou kroku jsou fáze buzeny kladnou nebo zápornou hodnotou proudu o velikosti I a výsledný vektor magnetického pole se pootočí o výše zmíněných ϕ = 90 elektrických. V režimu drobení kroku si tento úhel ϕ rozdělíme na n mikrokroků, pro velikost proudu jednotlivými fázemi pak platí rovnice: i A k ϕ = I cos n i B k ϕ π = I cos n 2 kde k = 0, 1, 2
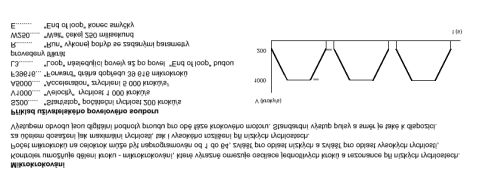
6 Pro uvedený motor budeme uvažovat vykonání čtyř mikrokroků na jeden krok, pro poměry proudů bude platit následující tabulka : Mikrokrok číslo Elektrický úhel ϕ Proud fází A i A Proud fází B i B 0 0 I ,5 0,924 I 0,383 I I 0,707 I 3 67,5 0,383 I 0,924 I I Tab.l. Velikost proudu jednotlivými fázemi při mikrokrokování Hodnota mezního vazebního momentu je potom konstantní a odpovídá velikosti momentu, získaného při buzení jedné fáze velikostí proudu I. Na rozdíl od režimu plného krokování, kde je křivka momentu posunována vždy o 90, při mikrokrokování je posunuta vždy o malý přírůstek úměrný velikosti kroku; tedy mikrokrokování nemění sklon křivky statické momentové charakteristiky a nezvětšuje tedy přesnost polohování. Výhody mikrokrokování jsou následující : klesne zvlnění momentu se vzrůstem počtu mikrokroků. poklesnou přirozené rezonance, protože došlo k omezení velikosti přechodových dějů mezi jednotlivými polohami kroků. poklesne hluk úměrně ke zvětšení počtu mikrokroků. Hluk je způsobován velkými změnami proudu a následnou změnou momentu. návrh pohonu může být upraven podle požadavků aplikace. Zde je nezbytný požadavek na přesnou velikost proudu s minimálním zkreslením pro jednotlivé fáze. systémová účinnost je zlepšena díky lepšímu využití momentu. Mikrokrokování tedy zvětšuje citlivost krokového motoru, ale chyba polohování plynoucí ze statické momentové charakteristiky pro daný moment zátěže, zůstává stejná jako pro režim plného kroku. Pro standardní řízení na plné kroky je rovnovážná poloha kroku dosahována sesouhlasením statorových a rotorových zubů a je tedy nezávislá na velikosti proudu. Při mikrokrokování je výsledná poloha rotoru kriticky závislá na velikosti proudu tekoucí každou fází a jakákoliv chyba ve velikosti proudu je přenesena přímo do chyby polohy. Statická momentová charakteristika krokových motorků Statická momentová charakteristika krokových motorků (obr.6) je závislost momentu motorku na napájecí frekvenci, která představuje střední hodnotu rychlosti otáčení motorku.výrobci krokových motorků zpravidla uvádějí dvě statické charakteristiky pro daný typ motorku, z nichž jedna je jmenovitou charakteristikou, udávající doporučený zatěžovací moment v závislosti na otáčkách a druhá je charakteristika mezní, jejíž překročení znamená vypadnutí ze synchronismu, což představuje ztrátu kroku a v důsledku polohovou chybu.
 obsahují řídicí þást realizovanou kontrolerem M1486 (plně programovatelné řízení krokového motoru s funkcemi malého programovatelného automatu) výkonovou část pro bipolární napájení krokového")
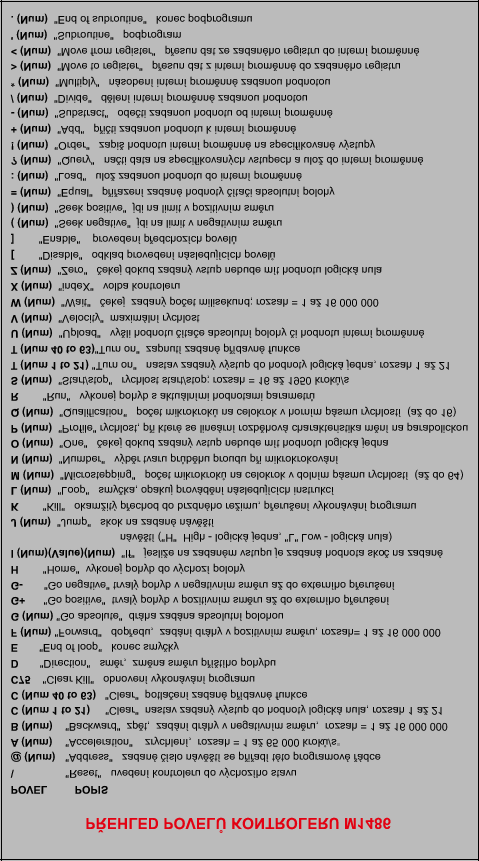
7 Obr. 6. Statická momentová charakteristika krokového motorku Řídicí systém pro napájení krokových motorků od firmy MICROCON. Programovatelné jednotky typu CD (viz.obr.7) obsahují řídicí þást realizovanou kontrolerem M1486 (plně programovatelné řízení krokového motoru s funkcemi malého programovatelného automatu) výkonovou část pro bipolární napájení krokového motoru s pulsní regulací proudu. Standardně jsou jednotky osazeny kontrolerem M1486E1 s vnitřní pamětí pro povely EEPROM bitů.povely jsou uchovány v paměti i po vypnutí napájení,bez potřeby zálohování. Kontroler je ovládán jednoduchými ASCII povely po sériové lince.povely kontroleru jsou snadno zapamatovatelné,znakem povelu je vždy první písmeno anglického názvu povelu. Např. povel pro zadání rychlosti Velocity 500 kroků za sekundu: V500. Uživatel se tak nemusí zabývat složitým programováním,ale jednoduchým zápisem povelů. Jednotky umožňují dělení celokroku - mikrokrokování, které výrazně omezuje oscilace jednotlivých kroků a rezonance při nízkých rychlostech. Realizace poháněného stroje či zařízení je díky jednoduchému ovládání velmi rychlá s možností pružného přizpůsobení případným změněným požadavkům pouhou změnou povelového souboru. Obr.7. Programovatelné jednotky typu CD


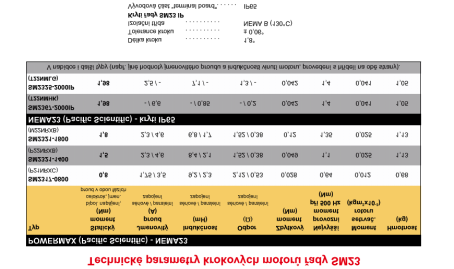
8 Všechny desky typu CD mají shodnou řídicí část a liší se pouze specifickými parametry výkonové části -viz tabulka.

9
10
11
12
13 Kontrolní otázky 1. Princip činnosti krokových motorků, základní rozdělení, vliv konstrukčního provedení na počtu kroků. Momentová charakteristika KM. 2. Způsob řízení krokových motorků, unipolární a bipolární řízení, mikrokrokování.
Mechatronické systémy s krokovými motory
 Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
Mechatronické systémy s krokovými motory (KM) 1. Rozdělení krokových motorů
 1. Rozdělení krokových motorů") Mechatronické systémy s krokovými motory (KM) 1. Rozdělení krokových motorů Úvod Krokové motory jsou vhodné pro aplikace, kde je požadováno přesné řízení polohy při nízkých a středních rychlostech, předností
Mechatronické systémy s krokovými motory (KM) 1. Rozdělení krokových motorů Úvod Krokové motory jsou vhodné pro aplikace, kde je požadováno přesné řízení polohy při nízkých a středních rychlostech, předností
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky a mezioborových inženýrských studií Katedra elektrotechniky a elektromechanických systémů Ing. Pavel Rydlo KROKOVÉ MOTORY A JEJICH ŘÍZENÍ Studijní texty
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky a mezioborových inženýrských studií Katedra elektrotechniky a elektromechanických systémů Ing. Pavel Rydlo KROKOVÉ MOTORY A JEJICH ŘÍZENÍ Studijní texty
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Osnova kurzu. Elektrické stroje 2. Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 3
 Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Určeno pro posluchače bakalářských studijních programů FS
 SYNCHRONNÍ STROJE Určeno pro posluchače bakalářských studijních programů FS Obsah Význam a použití 1. Konstrukce synchronních strojů 2. Princip činnosti synchronního generátoru 3. Paralelní chod synchronního
SYNCHRONNÍ STROJE Určeno pro posluchače bakalářských studijních programů FS Obsah Význam a použití 1. Konstrukce synchronních strojů 2. Princip činnosti synchronního generátoru 3. Paralelní chod synchronního
KROKOVÉ MOTORY. Výhody krokových motorů. a jejich nevýhody
 KROKOVÉ MOTORY Při konstrukci strojů a přístrojů se často setkáváme s potřebou přesného polohování jejich pohyblivých částí. Použijeme-li k pohonu stejnosměrné (DC) nebo střídavé (AC) y, je přesné polohování
KROKOVÉ MOTORY Při konstrukci strojů a přístrojů se často setkáváme s potřebou přesného polohování jejich pohyblivých částí. Použijeme-li k pohonu stejnosměrné (DC) nebo střídavé (AC) y, je přesné polohování
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Pohony šicích strojů
 Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Mechatronické systémy se spínanými reluktančními motory
 Mechatronické systémy se spínanými reluktančními motory 1. SRM Mechatronické systémy se spínaným reluktančním motorem (Switched Reluctance Motor = SRM) mají několik předností ve srovnání s jinými typy
Mechatronické systémy se spínanými reluktančními motory 1. SRM Mechatronické systémy se spínaným reluktančním motorem (Switched Reluctance Motor = SRM) mají několik předností ve srovnání s jinými typy
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Spínaný reluktanční motor s magnety ve statoru
 - 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
- 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
Digital Control of Electric Drives. Vektorové řízení asynchronních motorů. České vysoké učení technické Fakulta elektrotechnická
 Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje. Pracovní list - příklad vytvořil: Ing.
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
AKČNÍ ČLENY. Mezi ně patří hlavně pohony a na ně navazující regulační orgány.
 Akční členy Jsou to všechny prvky, které jsou určené k využití zpracované informace, tzn. prvky na konci řetězce zpracování informace. Mezi ně patří hlavně pohony a na ně navazující regulační orgány. Pohony
Akční členy Jsou to všechny prvky, které jsou určené k využití zpracované informace, tzn. prvky na konci řetězce zpracování informace. Mezi ně patří hlavně pohony a na ně navazující regulační orgány. Pohony
5. POLOVODIČOVÉ MĚNIČE
 5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,
, paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,") 1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
Zdroje napětí - usměrňovače
 ZDROJE NAPĚTÍ Napájecí zdroje napětí slouží k přeměně AC napětí na napětí DC a následnému předání energie do zátěže, která tento druh napětí (proudu) vyžaduje ke správné činnosti. Blokové schéma síťového
ZDROJE NAPĚTÍ Napájecí zdroje napětí slouží k přeměně AC napětí na napětí DC a následnému předání energie do zátěže, která tento druh napětí (proudu) vyžaduje ke správné činnosti. Blokové schéma síťového
Elektrické stroje pro hybridní pohony. Indukční stroje asynchronní motory. Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha
 Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
MS - polovodičové měniče POLOVODIČOVÉ MĚNIČE
 POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (u stejnosměrných střední hodnota) a u střídavých efektivní hodnota napětí a kmitočet. Obr.
POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (u stejnosměrných střední hodnota) a u střídavých efektivní hodnota napětí a kmitočet. Obr.
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
SYNCHRONNÍ MOTOR. Konstrukce
 SYNCHRONNÍ MOTOR Konstrukce A. stator synchronního motoru má stejnou konstrukci jako stator asynchronního motoru na svazku statorových plechů je uloženo trojfázové vinutí, potřebné k vytvoření točivého
SYNCHRONNÍ MOTOR Konstrukce A. stator synchronního motoru má stejnou konstrukci jako stator asynchronního motoru na svazku statorových plechů je uloženo trojfázové vinutí, potřebné k vytvoření točivého
Pohonné systémy OS. 1.Technické principy 2.Hlavní pohonný systém
 Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Název: Autor: Číslo: Únor 2013. Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Střídavé motory Synchronní motor Ing. Radovan
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Střídavé motory Synchronní motor Ing. Radovan
Rezonanční elektromotor II
 - 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
- 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh bezkartáčového stejnosměrného motoru autor: Vojtěch Štván 2012 Anotace Tato
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh bezkartáčového stejnosměrného motoru autor: Vojtěch Štván 2012 Anotace Tato
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 1.5.2 DERIVAČNÍ MOTOR SCHÉMA ZAPOJENÍ 1.5.2 DERIVAČNÍ MOTOR PRINCIP ČINNOSTI Po připojení zdroje stejnosměrného napětí na svorky motoru začne procházet
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 1.5.2 DERIVAČNÍ MOTOR SCHÉMA ZAPOJENÍ 1.5.2 DERIVAČNÍ MOTOR PRINCIP ČINNOSTI Po připojení zdroje stejnosměrného napětí na svorky motoru začne procházet
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY. 1.1 Vytvoření točivého magnetického pole
 1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
FYZIKA II. Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování)
") FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
LC oscilátory s transformátorovou vazbou
 1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 19. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
19. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.04 Integrovaná střední škola technická Mělník, K učilišti 2566,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
Synchronní stroj je točivý elektrický stroj na střídavý proud. Otáčky stroje jsou synchronní vůči točivému magnetickému poli.
 Synchronní stroje Rozvoj synchronních strojů byl dán zavedením střídavé soustavy. V počátku se používaly zejména synchronní generátory (alternátory), které slouží pro výrobu trojfázového střídavého proudu.
Synchronní stroje Rozvoj synchronních strojů byl dán zavedením střídavé soustavy. V počátku se používaly zejména synchronní generátory (alternátory), které slouží pro výrobu trojfázového střídavého proudu.
Mechatronické systémy s elektronicky komutovanými motory
 Mechatroncké systémy s elektroncky komutovaným motory 1. EC motor Uvedený motor je zvláštním typem synchronního motoru nazývaný též bezkartáčovým stejnosměrným motorem (anglcky Brushless Drect Current
Mechatroncké systémy s elektroncky komutovaným motory 1. EC motor Uvedený motor je zvláštním typem synchronního motoru nazývaný též bezkartáčovým stejnosměrným motorem (anglcky Brushless Drect Current
Speciální stroje. Krokový motor. Krokový motor. Krokový motor Lineární motor Selsyny Stejnosměrné EC motory
 Speciální stroje Krokový motor Lineární motor Selsyny Stejnosměrné EC motory P1 Krokový motor vykonává funkční pohyb nespojitě po stupních které se nazývají krokem Rotor z permanentního magnetu zaujme
Speciální stroje Krokový motor Lineární motor Selsyny Stejnosměrné EC motory P1 Krokový motor vykonává funkční pohyb nespojitě po stupních které se nazývají krokem Rotor z permanentního magnetu zaujme
5. Elektrické stroje točivé
 5. Elektrické stroje točivé Modelováním točivých strojů se dají simulovat elektromechanické přechodné děje v elektrizačních soustavách. Sem patří problematika stability, ostrovní provoz, nebo jen rozběhy
5. Elektrické stroje točivé Modelováním točivých strojů se dají simulovat elektromechanické přechodné děje v elektrizačních soustavách. Sem patří problematika stability, ostrovní provoz, nebo jen rozběhy
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Řízení otáček krokového motoru
 Řízení otáček krokového motoru Speed control stepper František Friedl Bakalářská práce 2008 ABSTRAKT Úkolem bakalářské práce bylo provést způsob řízení krokového motoru pomocí změny frekvence pulzů.
Řízení otáček krokového motoru Speed control stepper František Friedl Bakalářská práce 2008 ABSTRAKT Úkolem bakalářské práce bylo provést způsob řízení krokového motoru pomocí změny frekvence pulzů.
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Krokové motory Ondřej Novotný 2014 Abstrakt Předkládaná bakalářská práce je zaměřena
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Krokové motory Ondřej Novotný 2014 Abstrakt Předkládaná bakalářská práce je zaměřena
Část pohony a výkonová elektronika 1.Regulace otáček asynchronních motorů
 1. Regulace otáček asynchronních motorů 2. Regulace otáček stejnosměrných cize buzených motorů 3. Regulace otáček krokových motorů 4. Jednopulzní usměrňovač 5. Jednofázový můstek 6. Trojpulzní usměrňovač
1. Regulace otáček asynchronních motorů 2. Regulace otáček stejnosměrných cize buzených motorů 3. Regulace otáček krokových motorů 4. Jednopulzní usměrňovač 5. Jednofázový můstek 6. Trojpulzní usměrňovač
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Toroidní generátor. Ing. Ladislav Kopecký, červenec 2017
 1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je
1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
21. Výroba, rozvod a užití elektrické energie
 21. Výroba, rozvod a užití elektrické energie a) Výroba střídavého proudu (trojfázový generátor střídavého proudu, třífázová soustava napětí, spotřebitelská elektrická rozvodná síť, různé typy elektráren)
21. Výroba, rozvod a užití elektrické energie a) Výroba střídavého proudu (trojfázový generátor střídavého proudu, třífázová soustava napětí, spotřebitelská elektrická rozvodná síť, různé typy elektráren)
Skalární řízení asynchronních motorů
 Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor Elektrické stroje
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
3. Komutátorové motory na střídavý proud... 29 3.1. Rozdělení střídavých komutátorových motorů... 29 3.2. Konstrukce jednofázových komutátorových
 ELEKTRICKÁ ZAŘÍZENÍ 5 KOMUTÁTOROVÉ STROJE MĚNIČE JIŘÍ LIBRA UČEBNÍ TEXTY PRO VÝUKU ELEKTROTECHNICKÝCH OBORŮ 1 Obsah 1. Úvod k elektrickým strojům... 4 2. Stejnosměrné stroje... 5 2.1. Úvod ke stejnosměrným
ELEKTRICKÁ ZAŘÍZENÍ 5 KOMUTÁTOROVÉ STROJE MĚNIČE JIŘÍ LIBRA UČEBNÍ TEXTY PRO VÝUKU ELEKTROTECHNICKÝCH OBORŮ 1 Obsah 1. Úvod k elektrickým strojům... 4 2. Stejnosměrné stroje... 5 2.1. Úvod ke stejnosměrným
20ZEKT: přednáška č. 10. Elektrické zdroje a stroje: výpočetní příklady
 20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE. Fakulta elektrotechnická. Katedra elektrických pohonů a trakce BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Katedra elektrických pohonů a trakce BAKALÁŘSKÁ PRÁCE Řízení krokového motoru pomocí platformy TI Autor práce: Daniel Madara Vedoucí práce:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Katedra elektrických pohonů a trakce BAKALÁŘSKÁ PRÁCE Řízení krokového motoru pomocí platformy TI Autor práce: Daniel Madara Vedoucí práce:
Řízení asynchronních motorů
 Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
X14POH Elektrické POHony. K13114 Elektrických pohonů a trakce. elektrický pohon. Silnoproudá (výkonová) elektrotechnika. spotřeba el.
 elektrotechnika. spotřeba el.") Předmět: Katedra: X14POH Elektrické POHony K13114 Elektrických pohonů a trakce Přednášející: Prof. Jiří PAVELKA, DrSc. Silnoproudá (výkonová) elektrotechnika podíl K13114 na výuce technická zařízení elektráren
Předmět: Katedra: X14POH Elektrické POHony K13114 Elektrických pohonů a trakce Přednášející: Prof. Jiří PAVELKA, DrSc. Silnoproudá (výkonová) elektrotechnika podíl K13114 na výuce technická zařízení elektráren
Synchronní stroje 1FC4
 Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
Základy elektrotechniky 2 (21ZEL2)
") Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
ELEKTRICKÉ STROJE ÚVOD
 ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
1. Regulace otáček asynchronního motoru - skalární řízení
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Základní zapojení stykačových kombinací. Stykač. UČEBNÍ TEXT Elektrická instalace v budovách občanské vybavenosti
 Základní zapojení stykačových kombinací Stykač Stykač je zařízení pro spínání nebo rozepínání elektrického spojení. Stykače se používají v ovládacích obvodech, např. jako řídicí stykače pro střední výkony.
Základní zapojení stykačových kombinací Stykač Stykač je zařízení pro spínání nebo rozepínání elektrického spojení. Stykače se používají v ovládacích obvodech, např. jako řídicí stykače pro střední výkony.
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Elektrické výkonové členy Synchronní stroje
 Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Krokové motory. Klady a zápory
 Krokové motory Především je třeba si uvědomit, že pokud mluvíme o krokovém motoru, tak většinou myslíme krokový pohon. Znamená to, že se skládá s el. komutátoru, výkonového spínacího a napájecího prvku,
Krokové motory Především je třeba si uvědomit, že pokud mluvíme o krokovém motoru, tak většinou myslíme krokový pohon. Znamená to, že se skládá s el. komutátoru, výkonového spínacího a napájecího prvku,
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ Odměřovací zařízení
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Odměřovací zařízení Odměřovací zařízení podávají informace o poloze nástroje vůči obrobku a o odjeté dráze.
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Odměřovací zařízení Odměřovací zařízení podávají informace o poloze nástroje vůči obrobku a o odjeté dráze.
Doc. Ing. Stanislav Kocman, Ph.D , Ostrava
 9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
Energetická bilance elektrických strojů
 Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Elektromechanické akční členy (2-0-2)
") Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
Tématické okruhy teoretických zkoušek Part 66 1 Modul 3 Základy elektrotechniky
 Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Rezistor je součástka kmitočtově nezávislá, to znamená, že se chová stejně v obvodu AC i DC proudu (platí pro ideální rezistor).
.") Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
- stejnosměrné motory, - střídavé motory rozdělené: - asynchronní motory, - komutátorové motory, - synchronní motory - krokové motory
 Přehled typů elektrických motorů Elektrické motory mohou být děleny podle různých hledisek, například: podle tvaru (viz obr. 1) o patkové, přírubové a vestavné podle způsobu chlazení, bez chlazení u motorů
Přehled typů elektrických motorů Elektrické motory mohou být děleny podle různých hledisek, například: podle tvaru (viz obr. 1) o patkové, přírubové a vestavné podle způsobu chlazení, bez chlazení u motorů
Název materiálu: Elektromagnetické jevy 3
 Název materiálu: Elektromagnetické jevy 3 Jméno autora: Mgr. Magda Zemánková Materiál byl vytvořen v období: 2. pololetí šk. roku 2010/2011 Materiál je určen pro ročník: 9. Vzdělávací oblast: Fyzika Vzdělávací
Název materiálu: Elektromagnetické jevy 3 Jméno autora: Mgr. Magda Zemánková Materiál byl vytvořen v období: 2. pololetí šk. roku 2010/2011 Materiál je určen pro ročník: 9. Vzdělávací oblast: Fyzika Vzdělávací
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Porokluz pólů a statická stabilita synchronního generátoru
 1 Porokluz pólů a statická stabilita synchronního generátoru Stabilita chodu synchronního generátoru je dána synchronizačním výkonem, který stroj udržuje v synchronním chodu. Protože synchronizační výkon
1 Porokluz pólů a statická stabilita synchronního generátoru Stabilita chodu synchronního generátoru je dána synchronizačním výkonem, který stroj udržuje v synchronním chodu. Protože synchronizační výkon
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor 2007. Sylabus tématu
 Stýskala, 2006 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Sylabus tématu 1. Elektromagnetické
Stýskala, 2006 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Sylabus tématu 1. Elektromagnetické
2 Teoretický úvod 3. 4 Schéma zapojení 6. 4.2 Měření třemi wattmetry (Aronovo zapojení)... 6. 5.2 Tabulka hodnot pro měření dvěmi wattmetry...
... 6. 5.2 Tabulka hodnot pro měření dvěmi wattmetry...") Měření trojfázového činného výkonu Obsah 1 Zadání 3 2 Teoretický úvod 3 2.1 Vznik a přenos třífázového proudu a napětí................ 3 2.2 Zapojení do hvězdy............................. 3 2.3 Zapojení
Měření trojfázového činného výkonu Obsah 1 Zadání 3 2 Teoretický úvod 3 2.1 Vznik a přenos třífázového proudu a napětí................ 3 2.2 Zapojení do hvězdy............................. 3 2.3 Zapojení
Základy elektrotechniky
 Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE
 B1M15PPE") SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE USPOŘÁDÁNÍ SYNCHRONNÍHO STROJE Stator: Trojfázové vinutí po 120 Sinusové rozložení v drážkách Připojení na trojfázovou síť Rotor: Budicí vinutí napájené
SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE USPOŘÁDÁNÍ SYNCHRONNÍHO STROJE Stator: Trojfázové vinutí po 120 Sinusové rozložení v drážkách Připojení na trojfázovou síť Rotor: Budicí vinutí napájené
10. Měření trojfázových synchronních generátorů
 U = U 1X 1 f X 50 kde U 1X je napětí odpovídající kmitočtu f X U 1 napětí kmitočtu 50 Hz, použitého pro měření momentové charakteristiky (přibližně 0,35 U 1n ) Změřený moment přepočítáme na jmenovité napětí
U = U 1X 1 f X 50 kde U 1X je napětí odpovídající kmitočtu f X U 1 napětí kmitočtu 50 Hz, použitého pro měření momentové charakteristiky (přibližně 0,35 U 1n ) Změřený moment přepočítáme na jmenovité napětí
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 25. 3. 2014
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 25. 3. 2014
musí být odolný vůči krátkodobým zkratům při zkratovém přenosu kovu obloukem,
 1 SVAŘOVACÍ ZDROJE PRO OBLOUKOVÉ SVAŘOVÁNÍ Svařovací zdroj pro obloukové svařování musí splňovat tyto požadavky : bezpečnost konstrukce dle platných norem a předpisů, napětí naprázdno musí odpovídat druhu
1 SVAŘOVACÍ ZDROJE PRO OBLOUKOVÉ SVAŘOVÁNÍ Svařovací zdroj pro obloukové svařování musí splňovat tyto požadavky : bezpečnost konstrukce dle platných norem a předpisů, napětí naprázdno musí odpovídat druhu
Obr. 1 Konstrukce a charakteristika elektromagnetu s podélným tahem teoretická přerušovaně, skutečná plně
 POHYBOVÉ MECHANISMY ELEKTROMAGNETY Nejjednodušší akční členy, převádějící energii elektrickou na mechanickou jsou stejnosměrné elektromagnety. Každý pohybový elektromagnet má pevnou část, jho (jádro) s
POHYBOVÉ MECHANISMY ELEKTROMAGNETY Nejjednodušší akční členy, převádějící energii elektrickou na mechanickou jsou stejnosměrné elektromagnety. Každý pohybový elektromagnet má pevnou část, jho (jádro) s
Momentové motory. (vestavné provedení) TGQ Momentové (přímé) motory
 TGQ Momentové (přímé) motory") Momentové motory (vestavné provedení) TGQ Momentové (přímé) motory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Momentové motory (vestavné provedení) TGQ Momentové (přímé) motory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK
 STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod):
:") 1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod): a. Mohou pracovat na částech elektrických zařízení nn bez napětí, v blízkosti nekrytých pod napětím ve vzdálenosti větší než 1m s dohledem, na částech
1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod): a. Mohou pracovat na částech elektrických zařízení nn bez napětí, v blízkosti nekrytých pod napětím ve vzdálenosti větší než 1m s dohledem, na částech