Počítačové zpracování obrazu Projekt Učíme se navzájem
|
|
|
- Daniela Křížová
- před 9 lety
- Počet zobrazení:
Transkript
1 Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 23. března 2010 Tomáš Pokorný Jaroška 1

2 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní cíle 5 Programové vybavení 5 První kroky 6 Teorie! 7 Snímání a zpracování obrazu 7 Kalibrace 7 Transformace 7 Poměrová transformace 8 Transformace se 2 body 8 Grafická transformace 9 Další transformace 9 Zobrazení 10 Implementace! 11 Snímání obrazu 11 Kalibrace 11 Transformace 12 Poměrová transformace 12 Transformace se dvěma body 12 Grafická transformace 12 Zobrazení 12 Aktuální stav! 13 Aktuálně fungující 13 Rozpracované 13

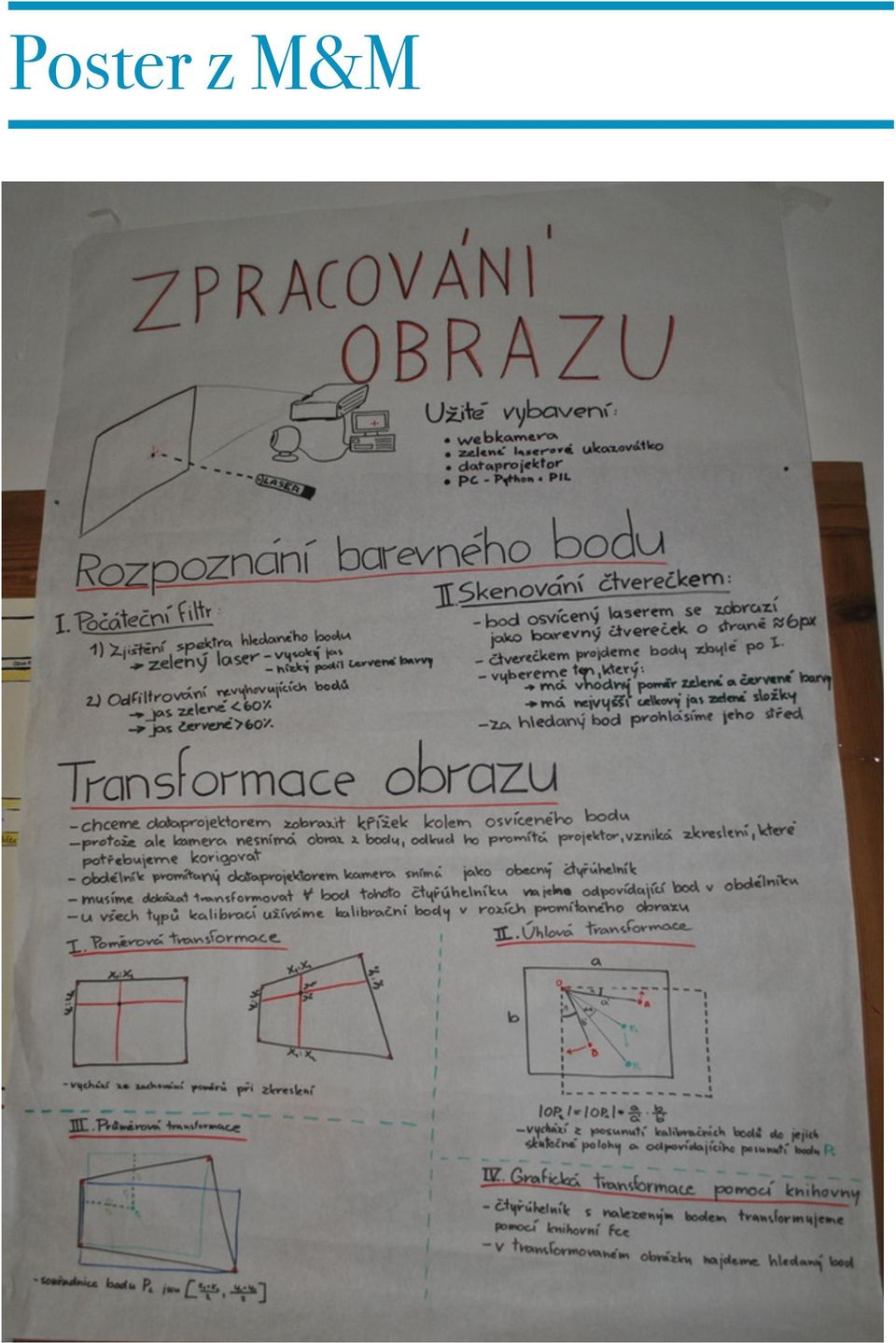
3 Problémy 13 Budoucnost! 14 Dokončení transformace 14 Možné aplikace 14 Kreslení 14 Střílení balonků 14 Ovládání myši 14 Odkazy a zdroje! 15 Poděkování! 15 Poster z M&M! 16

4 Abstrakt Projekt Počítačové zpracování obrazu si klade za cíl pomocí kamery a projektoru připojeného k počítači umožnit uživateli, aby laserového ukazovátka mohl používat jako ukazatele na objekty zobrazené na projektoru. Aplikace je napsána v Objective C. Funkce aplikace jsou tyto: kalibrace webkamery pro dané umístění, zachycení a načtení obrazu z webkamery, analýza a hledání nasvíceného bodu, transformace snímaného obrazu pomocí transformační funkce a kalibračních dat a finální vykreslení nasvíceného bodu na projektoru. Rozpracováno je zpřesnění transformace obrazu a v budoucnu jsou plánovány aplikace a hry tento software využívající.

5 Začátky M&M Na soustředění korespondenčního semináře M&M jsem se s touto problematikou setkal v rámci tzv. konfery, což byla několika odpolední práce s následnou prezentací výsledků. Zde jsme dostali již předpřipravenou část softwaru pro snímání obrazu a pro promítání výsledků a dále jsme se zabývali zpracováním tohoto obrazu a jeho správným vykreslováním. Zde vznikly všechny dosud používané transformace a velká většina aktuálního kódu. PŮVODNÍ CÍLE Zadání znělo takto: Cílem tématu je vybrat vhodnou detekovanou charakteristiku obrazu, vymyslet algoritmus na detekci vlastnosti v obrazu a pak naprogramovat a testovat na počítači s webkamerou, možná v kombinaci s projektorem. Cíl je možné si vybrat, možnosti jsou např. detekce barevné tečky, sledování více teček či trajektorie pohybu tečky či jiného objektu. Bude potřeba z obrazu odstranit pozadí a perspektivní zkreslení. K tomu bude potřeba i geometrické počítání a transformace spolu s měřením či odhadem toho zkreslení. Pokud se povede dobrá kalibrace a odstranění zkreslení, může se promítat zpětná vazba přímo na snímané objekty. Původně jsme mysleli, že zpracování půjde snadno a že se za chvíli dostaneme k detekci pohybu a vykreslování čáry, ale ukázalo se, že transformace není vůbec jednoduchá a tak jsme u ní prakticky skončili, částečně vlivem její obtížnosti, částečně vlivem začátečnické chyby. PROGRAMOVÉ VYBAVENÍ Na M&M jsme pracovali na Linuxovém notebooku, ke kterému byla připojena webkamera a projektor, snímání probíhalo pomocí MPlayeru, ke zpracování sloužil Python s PIL a Tk pro zobrazování výsledků. Nynější vybavení je notebook s Mac OS X vybavený integrovanou webkamerou isight, p ř ipojovan ý k projektoru. Snímání je realizováno pomocí frameworku CocoaSequenceGrabber v programu HledaniBodu. Tento program je napsán v Objective C a v něm rovněž probíhá hledání nejsvětlejšího bodu, transformace jeho souřadnic a jeho vykreslení na projektor.

6 PRVNÍ KROKY Ze začátku jsme se učili pracovat s Pythonem, protože jsme ho nikdo pořádně neuměli, a poté jsme přistoupili k vlastnímu zpracování obrazu. Zjišťovali jsme, jak obrázek vypadá, co se v něm všechno dá najít, jak je charakteristický nasvícený bod a zkoušeli jsme ho hledat. Poté přišla na řadu transformace obrazu z kamery, na které jsme strávili dlouhý čas. Vzniklo několik konkurenčních algoritmů, avšak žádný nefungoval nijak zvlášť přesvědčivě. Nakonec se nám podařilo zprovoznit dvě transformace s relativně dobrými výsledky a úspěšně zprovoznit vykreslování.

7 Teorie SNÍMÁNÍ A ZPRACOVÁNÍ OBRAZU Obraz je snímán pomocí frameworku CocoaSequenceGrabber v programu HledaniBodu. Program snímá obrázky tak, jak jsou poskytovány kamerou a na hledá v nich nejsvětlejší bod a transformuje jeho souřadnice. Hledání probíhá tak, že je obrázek převeden na pole bytů a nad ním se vždy počítá součet 5x5 pixelů po jednotlivých barevných složkách. Před tímto výpočtem můžou být nastaveny omezující podmínky, kdy je zbytečné výpočet provádět, protože jsou body příliš tmavé než aby na ně bylo svíceno. Z jednotlivých blokových součtů je zjištěno maximum hodnoty součtu hledané barevné složky a definitivně je vybrán ten bod, který má tento součet nejvyšší. U tohoto maxima jsou ještě kontrolovány součty jednotlivých složek, aby se omezily artefakty kdy pokud na projektor nesvítím se nezachytávaly zobrazené křížky. Tato metoda se ukázala být velmi spolehlivá, ale je potřeba najít vhodné nastavení konstant pro zahazování bodů, protože obzvláště při denním osvětlení či osvětlení různými zdroji světla jsou snímané body různých barev a je potřeba co nejvíce špatných zahodit, ale nezahodit s nimi i ty, co chceme najít. KALIBRACE Kalibrace je prvním z dějů souvisejících s transformací. Cílem kalibrace je zjistit, v jakých bodech na snímaném obraze se zobrazují rohy obrazu zobrazovaného dataprojektorem. To je důležité proto, abychom dokázali přepočítat bod nalezený na obrazu webkamery na bod, který zobrazíme na projektoru. Nyní k funkci kalibrace. Program postupně rozsvítí 4 čtverečky v rozích obrazu projektoru a vždy chvíli počká, aby se kamera přizpůsobila, pak je sejme již popsaným způsobem a najde je. Tímto získáváme 4 kalibrační body, se kterými již můžeme počítat v transformacích. TRANSFORMACE Toto je nejdůležitější a matematicky nejobtížnější část celého projektu, která zajišťuje správné zobrazení bodu na projektoru. Co to je a proč je potřeba?

8 Předpokládejme, že máme projektor, který promítá na plátno obdélníkový obraz. Pokud by ho promítal zkreslený, má své vlastní funkce ke korekci tohoto zkreslení. Pokud nyní obraz snímáme kamerou, získáme nějaký útvar. Optimální situace nastává, pokud kamera snímá ze stejného bodu, jako promítá projektor. V tom případě je snímaný útvar obdélník se stejným poměrem stran k promítanému obrazu. Tady nám stačí úplně základní transformace a to jednoduché přinásobení konstantou odpovídající poměru délky strany snímaného a promítaného obrazu. Toto je ale situace, která nastane velmi zřídka. Většinou snímáme kamerou obraz zkreslený, protože pokud si představíme to, co snímá kamera, jde o jakýsi nekonečně vysoký čtyřboký jehlan. Pokud snímáme útvar mimo osu projektoru, bude snímaný útvar určitým řezem daného jehlanu, tudíž to bude docela obecný čtyřúhelník. My potřebujeme tento čtyřúhelník roztáhnout vhodně tak, abychom získali obdélník, který bude odpovídat obdélníku promítanému projektorem, abychom mohli tento obdélník zobrazit. To je právě záležitost transformace Transformace se 2 body β α Matematický popis " Toto je nová transformace vymyšlená Lukášem Langerem a je v současnosti používaná. Základem je to, že při zachycení zkresleného obrazu se původně rovnoběžné přímky určené rohovými body A, B, C, D budou sbíhat a tudíž se protnou v nějakém bodě (Q, W). Tento bod " jednoduše nalezneme prodloužením stran. Tímto bodem prochází i přímka určená "!" #$$$$% &'()*! 78 #$$$$% &9():! $%&'()%&"*+,"-./012"345"+6"

9 zachyceným bodem P a rovnoběžná se stranou. Přímka procházející zachyceným bodem P a rovnoběžná se stranou AC nebo AB bude při zkreslení procházet nalezeným průsečíkem. Nalezneme průsečík této přímky se stranou AB nebo AC, nazveme ho α a β a určíme poměr části k průsečíku k celé této straně. Toto provedeme pro obě rovnoběžné strany a získané poměry stačí vynásobit šířkou a výškou zobrazovaného obrazu. Tato transformace dává nejlepší výsledky s přesností okolo 5cm. Poměrová transformace Toto byla nejlepší námi naprogramovaná transformace. Základem je fakt, že i ve zkresleném útvaru zůstanou zachovány poměry vzdáleností a to speciálně poměrů vzdáleností nalezeného osvíceného bodu od stran. Pokud tuto úvahu zobecníme na dva rozměry, získáme rovnice, pomocí kterých můžeme získané souřadnice nalezeného bodu přepočíst na souřadnice bodu na obrazovce. Grafická transformace Tato transformace se uplatnila hlavně v začátcích. Je postavena na funkci z knihovny PIL, která umí převést zadaný čtyřúhelník na obdélník. To je přesně to, co potřebujeme, ovšem má to jednu poměrně zásadní nevýhodu. Protože je to funkce z grafické knihovny, znamená to, že tuto transformaci umí provést pouze s obrázkem, nikoli jen daty. Je tedy potřeba vytvořit obrázek, zakreslit do něj nalezený bod, obrázek transformovat a opět transformovaný bod nalézt. To jsou hlavní 2 důvody, proč je transformace pomalá, což je její hlavní nevýhoda. Musí provést transformaci bitmapy, tzn. přepočítat každý pixel a pak my ji ještě musíme projít, abychom transformovaný pixel nalezli. Navíc je to transformace závislá na Pythonu, při přepsání transformace do Objective C musela být tato transformace vypuštěna. Další transformace Během vývoje vznikly ještě 2 další transformace a to transformace přibližná, která vždy předpokládala, že útvar je lichoběžník a to postupně v obou rozměrech a výsledek pak zprůměrovala. Toto byla používaná transformace v začátcích, než jsme přišli na chybu v transformaci poměrové. Se stoupajícím zkreslením rapidně klesá přesnost. Druhá ze vzniklých transformací byla založena na úhlech a postupném posouvání kalibračních bodů do vrcholů promítaného čtyřúhelníka. Při nasimulování její činnosti ale bylo zjištěno, že byly úvahy chybné a tato transformace nemůže fungovat.

10 ZOBRAZENÍ Poté, co je nalezen bod, který se má vykreslit na projektoru, ho již stačí jenom vykreslit. Obraz se vykresluje do černého okna o velikosti obrazu promítaného projektorem. Tato část nepotřebuje nijaké zvláštní komentáře, jediné, na co je třeba si dávat pozor, je, abychom křížek v místě vykreslovaného bodu vykreslovali správnou barvou, kterou nevyhodnotí program jak nasvětlený bod ukazovátkem.

11 Implementace Celý proces a vzájemná volání metod jsou zakreslená v grafu v souboru schema_kompletni.vue a pdf. Tato část bude přepsána jako dokumentace jednotlivých metod... SNÍMÁNÍ OBRAZU CocoaSequenceGrabber P ů vodní systém byl př es MPlayer, jehož př íkaz mplayer tv:// -tv driver=v4l2:device=/dev/video:width=320:height=240:noaudio -vo jpeg zajistil, aby se ukládaly z kamery obrázky ve formátu JPEG do zadané složky. MPlayer na Mac OSu si ale nedokázal s integrovanou webkamerou poradit a tak přišel na řadu program BTV, který dělal v tomto případě to stejné, co MPlayer, akorát s 5x vyšší náročností na výkon. Nakonec jsem se začal věnovat Objective C a naprogramoval program HledaniBodu, který pomocí frameworku CocoaSequenceGrabber zachytává přímo snímky z kamery. ZPRACOVÁNÍ OBRAZU ZOProcessImage Obraz je převeden na pole bytů, z nichž každý udává jednu složku barvy pixelu. Program proto skáče po 4 prvcích pole (složky obrazu jsou RGBA ) a pro každý pixel spočítá pomocí metody getsumsquareatindex součet jednotlivých složek ve čtverečku 5x5. Každý pixel je ověřován, jestli má dostatečný jas a pokud nemá, sumační čtverec se nepočítá. Filtrování je i na výstupu čtverečkovací metody, určuje minimální jas nejjasnějšího sumačního čtverce, nastavuje se pomocí posuvníků v GUI. KALIBRACE ZOCalibrate Kalibrace funguje tak, že je zobrazena černá obrazovka a spuštěn časovač. Poté, co doběhne je zobrazen bod v rohu obrazu promítaného projektorem a spuštěn druhý časovač. Po jeho doběhu je opět zobrazena černá obrazovka a navíc nalezen nejsvětlejší bod minulého obrazu,

12 T a k t o j e t o p r o v š e c h n y 4 b o d y. P o t é j e z a v o l á n a m e t o d a initwithcalibrationarray:(nsarray *), kde NSArray * je pole s kalibračními body. tato metoda připraví pomocné kalibrační konstanty a tím je vše připraveno k transformaci. TRANSFORMACE Poměrová transformace ZOTransform Tato transformace je počítána metodou transformpoint:(nspoint)z třídy ZOTransform, kde NSPoint je struktura obsahující dvojici souřadnic nalezeného bodu v útvaru. Třída obsahuje potřebné výpočty pro dané kalibrační body a nalezený bod v útvaru. Transformace se dvěma body ZO2PointTransform Tato transformace, reprezentována třídou ZO2PointTransform má stené rozhraní jako transformace poměrová, tedy transformace se počítá metodou transformpoint: (NSPoint). Třída opět obsahuje potřebné výpočty a konstanty nutné pro přepočet. ZOBRAZENÍ ZO2ProjectorView Zobrazení je řešeno třídou ZOProjectorView, která ovládá NSView, na kterém jsou body zobrazovány. Bod se určuje metodou setpoint1: (NSPoint) a setpoint2: (NSPoint). Tato třída také obstarává zobrazování kalibračního obrazce při kalibraci, a to pomocí metody setcalpoint: (int), kde 0 je normální běh a 1 až 4 jsou čísla kalibračních bodů.

13 Aktuální stav AKTUÁLNĚ FUNGUJÍCÍ Aktuálně funguje celý základní proces - načtení, zpracování, transformace i zobrazení. Fungují v základní podobě, vše je potřeba nastavovat ve zdrojovém kódu. ROZPRACOVANÉ Rozpracovaná je první aplikace, a to kreslení laserovým ukazovátkem. Je ve velmi raném stádiu vývoje, je velmi náročná na výpočetní výkon při větším množství objektů. Rovněž je téměř u konce rozdělení programu do tříd na jednotlivé úkony. V nejbližší době se chystám zprovoznit nastavování parametrů přes GUI. PROBLÉMY Prvním, zásadním a nejhloupějším problémem byl problém s poměrovou transformací. Jeho podstata byla v odlišném číslování rohů obdélníka při kalibraci a při transformaci. Tato chyba nás zdržela o jedno odpoledne, kdy jsme mohli pokračovat v programování. Byla odhalena až asi v polovině prezentace konfery na soustředění M&M. Problémy byly při přepisování do Objective C, ale byly úspěšně překonány. Největším problémem bylo vždy rozběhat danou transformaci, protože při přepisování do počítače vznikla vždy alespoň jedna chyba, která se dost těžko hledala. Tyto problémy se táhly dlouhou dobu, je to vidět i na tom, že první námi naprogramovaná transformace se podařila zprovoznit až za dlouhou dobu a například zprovoznit dvoubodovou transformaci trvalo od 27. ledna, kdy byla uveřejněna na SVN až do 18. března, kdy vyšla stabilní revize.

14 Budoucnost GUI, VGA Nejdůležitějším cílem je dokončit rozdělení do mnoha tříd, tyto třídy zdokumentovat a vyčistit od balastu vzniklého při programování. Následně je v plánu umožnit nastavování všech potřebných parametrů zpracovávání obrazu přes GUI. Poté bude možný přechod na rozlišení VGA, které umožní přesnější ukazování, ale musí být dobře nastavené zahazování pixelů, protože jinak počítač nestíhá obraz zpracovávat. MOŽNÉ APLIKACE Kreslení Místo toho, aby se zobrazoval jen křížek pod nasvíceným bodem bude laser za sebou zanechávat barevnou stopu. Tímto způsobem bude možné kreslit jednoduché obrázky a může být i možnost změny barvy. Opět je ale potřeba, aby barva čáry kreslené laserem nebyla stejná jako nasvícený bod, aby nebyla chybně zachycena jeho poloha. Střílení balonků Jednoduchá hra pro 1, v budoucnosti 2 hráče s různě barevnými laserovými ukazovátky, kteří budou pomocí svícení na balonky zobrazené na projektoru na tyto balonky střílet a získávat za ně body. Ovládání myši Pomocí laserového ukazovátka bude možné ovládat kursor myši. Zde je problém s barvou oken, která musí být diametrálně odlišná od barvy ukazovátka, aby nedocházelo k chybným detekcím. Rovněž by bylo potřeba detekovat kliknutí, například pomocí bliknutí laserem.

15 Odkazy a zdroje Seminář M&M: Referenční příručka Python Image Library Mac OS X Reference Library Zdrojové kódy programu a jeho stránky: Blog se zprávami z aktuálního postupu: Poděkování Tomáši Gavenčakovi za vedení konfery na M&M Karlu Královi a Lukáši Langerovi za vymyšlení poměrové transformace Lukáši Langerovi za vymyšlení dvoubodové transformace Petrovi za spolupráci na konfeře Mgr. Marku Blahovi za technické zázemí a podporu při pokračování projektu A všem dalším, kteří mě svými radami nasměrovali na správnou cestu

16 Poster z M&M
Počítačové zpracování obrazu Projekt Učíme se navzájem
 Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 15. ledna 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní
Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 15. ledna 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní
Počítačové zpracování obrazu Projekt Učíme se navzájem
 Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 4. ledna 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní cíle
Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 4. ledna 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní cíle
Použití laserového ukazovátka k
 Gymnázium, Brno, tř. Kpt. Jaroše Použití laserového ukazovátka k ovládání počítače Závěrečná maturitní práce Vedoucí práce: Mgr. Marek Blaha Tomáš Pokorný Brno 2011 2 Na tomto místě bych chtěl poděkovat
Gymnázium, Brno, tř. Kpt. Jaroše Použití laserového ukazovátka k ovládání počítače Závěrečná maturitní práce Vedoucí práce: Mgr. Marek Blaha Tomáš Pokorný Brno 2011 2 Na tomto místě bych chtěl poděkovat
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Měření průtoku kapaliny s využitím digitální kamery
 Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Průběh funkce 1. Průběh funkce. Při vyšetření grafu funkce budeme postupovat podle následujícího algoritmu:
 Průběh funkce Průběh funkce Při vyšetření grafu funkce budeme postupovat podle následujícího algoritmu:. Určení definičního oboru. 2. Rozhodnutí, jestli je funkce sudá, lichá, periodická nebo nemá ani
Průběh funkce Průběh funkce Při vyšetření grafu funkce budeme postupovat podle následujícího algoritmu:. Určení definičního oboru. 2. Rozhodnutí, jestli je funkce sudá, lichá, periodická nebo nemá ani
Algoritmus pro hledání nejkratší cesty orientovaným grafem
 1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
Počítačové zpracování obrazu Projekt Učíme se navzájem
 Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 3. listopadu 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní
Počítačové zpracování obrazu Projekt Učíme se navzájem Tomáš Pokorný, Vojtěch Přikryl Jaroška 3. listopadu 2010 Tomáš Pokorný email: xtompok@gmail.com Jaroška 1 Obsah Abstrakt! 4 Začátky! 5 M&M 5 Původní
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
e-mail: RadkaZahradnikova@seznam.cz 1. července 2010
 Optimální výrobní program Radka Zahradníková e-mail: RadkaZahradnikova@seznam.cz 1. července 2010 Obsah 1 Lineární programování 2 Simplexová metoda 3 Grafická metoda 4 Optimální výrobní program Řešení
Optimální výrobní program Radka Zahradníková e-mail: RadkaZahradnikova@seznam.cz 1. července 2010 Obsah 1 Lineární programování 2 Simplexová metoda 3 Grafická metoda 4 Optimální výrobní program Řešení
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Programátorská dokumentace
 Programátorská dokumentace Požadavky Cílem tohoto programu bylo představit barevné systémy, zejména převody mezi nejpoužívanějšími z nich. Zároveň bylo úkolem naprogramovat jejich demonstraci. Pro realizaci
Programátorská dokumentace Požadavky Cílem tohoto programu bylo představit barevné systémy, zejména převody mezi nejpoužívanějšími z nich. Zároveň bylo úkolem naprogramovat jejich demonstraci. Pro realizaci
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech."
 Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech." Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Na
Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech." Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Na
Semestrální práce Mozaika aneb Co všechno umí pan Voronoi
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra informatiky a výpočetní techniky Semestrální práce Mozaika aneb Co všechno umí pan Voronoi Plzeň, 2008 Aubrecht Vladimír Obsah 1 Zadání...
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra informatiky a výpočetní techniky Semestrální práce Mozaika aneb Co všechno umí pan Voronoi Plzeň, 2008 Aubrecht Vladimír Obsah 1 Zadání...
AXONOMETRIE - 2. část
 AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
2.3.20 Grafické řešení soustav lineárních rovnic a nerovnic
 .3.0 Grafické řešení soustav lineárních rovnic a nerovnic Předpoklad: 307, 311 Př. 1: Vřeš soustavu rovnic + =. Pokud se také o grafické řešení. = 5 Tak jednoduchou soustavu už jsme dlouho neměli: + =
.3.0 Grafické řešení soustav lineárních rovnic a nerovnic Předpoklad: 307, 311 Př. 1: Vřeš soustavu rovnic + =. Pokud se také o grafické řešení. = 5 Tak jednoduchou soustavu už jsme dlouho neměli: + =
Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení
 Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení Polynom nad R = zobrazení f : R R f(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, kde a i R jsou pevně daná
Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení Polynom nad R = zobrazení f : R R f(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, kde a i R jsou pevně daná
Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na. x 2 x 1
 Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
JEVIŠTNÍ PERSPEKTIVA TABULKA 19
 OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
Matematika I, část I. Rovnici (1) nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.
 nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.") 3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
Grafické řešení rovnic a jejich soustav
 .. Grafické řešení rovnic a jejich soustav Předpoklady: 003 Pedagogická poznámka: V této hodině kreslíme na čtverečkovaný papír tak, aby jeden čtvereček představovala vzdálenost. Př. : Vyřeš graficky soustavu
.. Grafické řešení rovnic a jejich soustav Předpoklady: 003 Pedagogická poznámka: V této hodině kreslíme na čtverečkovaný papír tak, aby jeden čtvereček představovala vzdálenost. Př. : Vyřeš graficky soustavu
1 Základní funkce pro zpracování obrazových dat
 1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
Základy práce s programem pro interaktivní tabuli SMART notebook
 ZŠ praktická a ZŠ speciální Chodov, okres Sokolov, příspěvková organizace Základy práce s programem pro interaktivní tabuli SMART notebook Metodický materiál k základnímu školení Materiál vznikl v rámci
ZŠ praktická a ZŠ speciální Chodov, okres Sokolov, příspěvková organizace Základy práce s programem pro interaktivní tabuli SMART notebook Metodický materiál k základnímu školení Materiál vznikl v rámci
ICT podporuje moderní způsoby výuky CZ.1.07/1.5.00/ Matematika planimetrie. Mgr. Tomáš Novotný
 Název projektu ICT podporuje moderní způsoby výuky Číslo projektu CZ.1.07/1.5.00/34.0717 Název školy Gymnázium, Turnov, Jana Palacha 804, přísp. organizace Číslo a název šablony klíčové aktivity IV/2 Inovace
Název projektu ICT podporuje moderní způsoby výuky Číslo projektu CZ.1.07/1.5.00/34.0717 Název školy Gymnázium, Turnov, Jana Palacha 804, přísp. organizace Číslo a název šablony klíčové aktivity IV/2 Inovace
Práce v programu Word 2003
 Práce v programu Word 2003 Prostředí programu WORD 2003 Program WORD 2003 slouží k psaní textů, do kterých je možné vkládat různé obrázky, tabulky a grafy. Vytvořené texty se ukládají, jako dokumenty s
Práce v programu Word 2003 Prostředí programu WORD 2003 Program WORD 2003 slouží k psaní textů, do kterých je možné vkládat různé obrázky, tabulky a grafy. Vytvořené texty se ukládají, jako dokumenty s
Souřadnicové prostory
 Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Fakulta aplikovaných věd. Katedra kybernetiky. Ping Pong. Martin Skála
 Fakulta aplikovaných věd Katedra kybernetiky Ping Pong Semestrální práce z KKY/ZDO Martin Skála 22.6. 2011 1 Řešitelský tým: Martin Skála ma.ska@post.cz Zadání úlohy: Vytvořit hru ve stylu ping pongu.
Fakulta aplikovaných věd Katedra kybernetiky Ping Pong Semestrální práce z KKY/ZDO Martin Skála 22.6. 2011 1 Řešitelský tým: Martin Skála ma.ska@post.cz Zadání úlohy: Vytvořit hru ve stylu ping pongu.
Projekt do předmětu ZPO
 Projekt do předmětu ZPO Sledování ruky pomocí aktivních kontur 13. května 2014 Autoři: Pavlík Vít, xpavli62@stud.fit.vutbr.cz Žerdík Jan, xzerdi00@stud.fit.vutbr.cz Doležal Pavel, xdolez08@stud.fit.vutbr.cz
Projekt do předmětu ZPO Sledování ruky pomocí aktivních kontur 13. května 2014 Autoři: Pavlík Vít, xpavli62@stud.fit.vutbr.cz Žerdík Jan, xzerdi00@stud.fit.vutbr.cz Doležal Pavel, xdolez08@stud.fit.vutbr.cz
Návod k ovládání aplikace
 Návod k ovládání aplikace Tento návod se zabývá ovládáním aplikace PDF Annotation 1, která je založena na aplikaci AVP PDF Viewer a umožňuje nejen PDF dokumenty prohlížet, ale také do těchto dokumentů
Návod k ovládání aplikace Tento návod se zabývá ovládáním aplikace PDF Annotation 1, která je založena na aplikaci AVP PDF Viewer a umožňuje nejen PDF dokumenty prohlížet, ale také do těchto dokumentů
Využití ICT techniky především v uměleckém vzdělávání. Akademie - VOŠ, Gymn. a SOŠUP Světlá nad Sázavou
 Datum: 1. 12. 2013 Projekt: Registrační číslo: Číslo DUM: Škola: Jméno autora: Název sady: Název práce: Předmět: Ročník: Obor: Časová dotace: Vzdělávací cíl: Pomůcky: Využití ICT techniky především v uměleckém
Datum: 1. 12. 2013 Projekt: Registrační číslo: Číslo DUM: Škola: Jméno autora: Název sady: Název práce: Předmět: Ročník: Obor: Časová dotace: Vzdělávací cíl: Pomůcky: Využití ICT techniky především v uměleckém
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Klauzurní část školního kola kategorie A se koná
 56. ročník matematické olympiády Úlohy klauzurní části školního kola kategorie 1. rčete všechna reálná čísla s, pro něž má rovnice 4x 4 20x 3 + sx 2 + 22x 2 = 0 čtyři různé reálné kořeny, přičemž součin
56. ročník matematické olympiády Úlohy klauzurní části školního kola kategorie 1. rčete všechna reálná čísla s, pro něž má rovnice 4x 4 20x 3 + sx 2 + 22x 2 = 0 čtyři různé reálné kořeny, přičemž součin
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191. Obor 23-41-M/01 STROJÍRENSTVÍ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
Úloha 1. Text úlohy. Vyberte jednu z nabízených možností: NEPRAVDA. PRAVDA Úloha 2. Text úlohy
 Úloha 1 Úloha 2 Otázka se týká předchozího kódu. Určete pravdivost následujícího tvrzení: "Pro každý bod vytvoří úsečku mezi ním a středem panelu." Úloha 3 Otázka se týká předchozího kódu. Určete pravdivost
Úloha 1 Úloha 2 Otázka se týká předchozího kódu. Určete pravdivost následujícího tvrzení: "Pro každý bod vytvoří úsečku mezi ním a středem panelu." Úloha 3 Otázka se týká předchozího kódu. Určete pravdivost
2 Grafický výstup s využitím knihovny
 2 Grafický výstup s využitím knihovny Studijní cíl Tento blok je věnován základním principům při vytváření grafického výstupu pomocí standardních metod, které poskytuje grafické rozhraní. V textu budou
2 Grafický výstup s využitím knihovny Studijní cíl Tento blok je věnován základním principům při vytváření grafického výstupu pomocí standardních metod, které poskytuje grafické rozhraní. V textu budou
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
Přehled vhodných metod georeferencování starých map
 Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
7.5.3 Hledání kružnic II
 753 Hledání kružnic II Předpoklady: 750 Pedagogická poznámka: Tato hodina patří mezi vůbec nejtěžší Není reálné předpokládat, že by většina studentů dokázala samostatně přijít na řešení, po čase na rozmyšlenou
753 Hledání kružnic II Předpoklady: 750 Pedagogická poznámka: Tato hodina patří mezi vůbec nejtěžší Není reálné předpokládat, že by většina studentů dokázala samostatně přijít na řešení, po čase na rozmyšlenou
37. PARABOLA V ANALYTICKÉ GEOMETRII
 37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
Příklady k analytické geometrii kružnice a vzájemná poloha kružnice a přímky
 Příklady k analytické geometrii kružnice a vzájemná poloha kružnice a přímky Př. 1: Určete rovnice všech kružnic, které procházejí bodem A = * 6; 9+, mají střed na přímce p: x + 3y 18 = 0 a jejich poloměr
Příklady k analytické geometrii kružnice a vzájemná poloha kružnice a přímky Př. 1: Určete rovnice všech kružnic, které procházejí bodem A = * 6; 9+, mají střed na přímce p: x + 3y 18 = 0 a jejich poloměr
K OZA SE PASE NA POLOVINĚ ZAHRADY Zadání úlohy
 Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů
 obrazů") ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
VELIKOST VEKTORU, POČETNÍ OPERACE S VEKTORY
 VELIKOST VEKTORU, POČETNÍ OPERACE S VEKTORY Vektoru můžeme přisoudit velikost. S vektory také můžeme provádět početní operace, které jsme zvyklí provádět s čísly, tzn. že je možné je sčítat, odčítat a
VELIKOST VEKTORU, POČETNÍ OPERACE S VEKTORY Vektoru můžeme přisoudit velikost. S vektory také můžeme provádět početní operace, které jsme zvyklí provádět s čísly, tzn. že je možné je sčítat, odčítat a
pracovní list studenta
 Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Základy práce v programovém balíku Corel
 Základy práce v programovém balíku Corel Mgr. Tomáš Pešina Výukový text vytvořený v rámci projektu DOPLNIT První jazyková základní škola v Praze 4, Horáčkova 1100, 140 00 Praha 4 - Krč Základy počítačové
Základy práce v programovém balíku Corel Mgr. Tomáš Pešina Výukový text vytvořený v rámci projektu DOPLNIT První jazyková základní škola v Praze 4, Horáčkova 1100, 140 00 Praha 4 - Krč Základy počítačové
pomocný bod H perspektivního obrázku zvolte 10 cm zdola a 7 cm zleva.)
") Teoretické řešení střech Zastřešení daného půdorysu rovinami různého spádu vázaná ptačí perspektiva Řešené úlohy Příklad: tačí perspektivě vázané na Mongeovo promítání zobrazte řešení střechy nad daným
Teoretické řešení střech Zastřešení daného půdorysu rovinami různého spádu vázaná ptačí perspektiva Řešené úlohy Příklad: tačí perspektivě vázané na Mongeovo promítání zobrazte řešení střechy nad daným
Programujeme v softwaru Statistica
 Programujeme v softwaru Statistica díl třetí Newsletter Statistica ACADEMY Téma: Programování, makra, skripty Typ článku: Návody V předchozích článcích (díl první, díl druhý) jsme si osvětlili základní
Programujeme v softwaru Statistica díl třetí Newsletter Statistica ACADEMY Téma: Programování, makra, skripty Typ článku: Návody V předchozích článcích (díl první, díl druhý) jsme si osvětlili základní
Úterý 8. ledna. Cabri program na rýsování. Základní rozmístění sad nástrojů na panelu nástrojů
 Úterý 8. ledna Cabri program na rýsování program umožňuje rýsování základních geometrických útvarů, měření délky úsečky, velikosti úhlu, výpočet obvodů a obsahů. Je vhodný pro rýsování geometrických míst
Úterý 8. ledna Cabri program na rýsování program umožňuje rýsování základních geometrických útvarů, měření délky úsečky, velikosti úhlu, výpočet obvodů a obsahů. Je vhodný pro rýsování geometrických míst
Geometrické algoritmy pro počítačovou grafiku
 České vysoké učení technické v Praze Fakulta jaderná a fyzikálně inženýrská Katedra fyzikální elektroniky Informatická fyzika Geometrické algoritmy pro počítačovou grafiku Semestrální práce Autor práce:
České vysoké učení technické v Praze Fakulta jaderná a fyzikálně inženýrská Katedra fyzikální elektroniky Informatická fyzika Geometrické algoritmy pro počítačovou grafiku Semestrální práce Autor práce:
CVIČNÝ TEST 36. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 36 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Určete iracionální číslo, které je vyjádřeno číselným výrazem (6 2 π 4
CVIČNÝ TEST 36 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Určete iracionální číslo, které je vyjádřeno číselným výrazem (6 2 π 4
kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
 Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
CVIČNÝ TEST 48. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 48 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán konvexní čtyřúhelník, jehož vnitřní
CVIČNÝ TEST 48 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán konvexní čtyřúhelník, jehož vnitřní
5.2.3 Duté zrcadlo I. Předpoklady: 5201, 5202
 5.2.3 Duté zrcadlo I Předpoklady: 5201, 5202 Dva druhy dutých zrcadel: kulové = odrazivá plocha zrcadla je částí kulové plochy snazší výroba, ale horší zobrazení (aby se zobrazovalo přesně, musíme použít
5.2.3 Duté zrcadlo I Předpoklady: 5201, 5202 Dva druhy dutých zrcadel: kulové = odrazivá plocha zrcadla je částí kulové plochy snazší výroba, ale horší zobrazení (aby se zobrazovalo přesně, musíme použít
Uživatelská příručka
 PŘÍLOHA B Uživatelská příručka Před prvním spuštění aplikace je nezbytné ujasnit si některé pojmy: web URL webových stránek, pro které se budou zjišťovat pozice. klíčové slovo - Slovní spojení nebo samostatné
PŘÍLOHA B Uživatelská příručka Před prvním spuštění aplikace je nezbytné ujasnit si některé pojmy: web URL webových stránek, pro které se budou zjišťovat pozice. klíčové slovo - Slovní spojení nebo samostatné
Řez jehlanu. Mongeovo promítání. Pravidelný šestiboký jehlan o výšce v má podstavu ABCDEF v půdorysně. Zobrazte řez jehlanu rovinou σ.
 Řez jehlanu Mongeovo promítání Pravidelný šestiboký jehlan o výšce v má podstavu ABCDEF v půdorysně. Zobrazte řez jehlanu rovinou σ. A[ 3; 1; 0], B[0; 2; 0], y C > y B, v = 8cm, σ(4; 7; 3) B 2 A 2 Vyneseme
Řez jehlanu Mongeovo promítání Pravidelný šestiboký jehlan o výšce v má podstavu ABCDEF v půdorysně. Zobrazte řez jehlanu rovinou σ. A[ 3; 1; 0], B[0; 2; 0], y C > y B, v = 8cm, σ(4; 7; 3) B 2 A 2 Vyneseme
Středoškolská technika SCI-Lab
 Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
Aplikace třetího rozměru v archeologii. Úvod a 3D prostředí
 Aplikace třetího rozměru v archeologii Úvod a 3D prostředí Prezentace 3D Modely a jejich prostředí 3D Scannery Fotogrammetrie Aplikace Závěr 3D Model Virtuální trojrozměrný objekt nesoucí fyzickou i grafickou
Aplikace třetího rozměru v archeologii Úvod a 3D prostředí Prezentace 3D Modely a jejich prostředí 3D Scannery Fotogrammetrie Aplikace Závěr 3D Model Virtuální trojrozměrný objekt nesoucí fyzickou i grafickou
Kótované promítání. Úvod. Zobrazení bodu
 Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
CVIČNÝ TEST 37. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
BenQ MW860USTi. Dell S500wi. Syté, ale matné a tmavé, kromě azurové, která je jakoby pastelová. 8 bodů 9 bodů 9 bodů 10 bodů
 Kvalita projekce textu Kvalita barvy Syté, ale tmavé. Žlutá a zelená jsou matné. Syté, ale matné, tmavé a kalné. Syté, ale matné a tmavé, kromě azurové, která je jakoby pastelová. Syté, ale matné a tmavé,
Kvalita projekce textu Kvalita barvy Syté, ale tmavé. Žlutá a zelená jsou matné. Syté, ale matné, tmavé a kalné. Syté, ale matné a tmavé, kromě azurové, která je jakoby pastelová. Syté, ale matné a tmavé,
5.1.2 Volné rovnoběžné promítání
 5.1.2 Volné rovnoběžné promítání Předpoklady: 5101 Základní stereometrický problém: zabýváme se trojrozměrnými objekty, ale k práci používáme dvojrozměrný papír musíme najít způsob, jak trojrozměrné objekty
5.1.2 Volné rovnoběžné promítání Předpoklady: 5101 Základní stereometrický problém: zabýváme se trojrozměrnými objekty, ale k práci používáme dvojrozměrný papír musíme najít způsob, jak trojrozměrné objekty
Lingebraické kapitolky - Analytická geometrie
 Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
TECHNOLOGIE ELASTICKÉ KONFORMNÍ TRANSFORMACE RASTROVÝCH OBRAZŮ
 TECHNOLOGIE ELASTICKÉ KONFORMNÍ TRANSFORMACE RASTROVÝCH OBRAZŮ ÚVOD Technologie elastické konformní transformace rastrových obrazů je realizována v rámci webové aplikace NKT. Tato webová aplikace provádí
TECHNOLOGIE ELASTICKÉ KONFORMNÍ TRANSFORMACE RASTROVÝCH OBRAZŮ ÚVOD Technologie elastické konformní transformace rastrových obrazů je realizována v rámci webové aplikace NKT. Tato webová aplikace provádí
Sono hodnocení pohybu sondy Popis uživatelského rozhraní programu
 Sono hodnocení pohybu Popis uživatelského rozhraní programu Číslo projektu: Název projektu: Předkládá: Název organizace: TA04011392 Časná detekce karcinomu prsu ultrazvukem F. Šroubek, M. Bartoš, J. Schier,
Sono hodnocení pohybu Popis uživatelského rozhraní programu Číslo projektu: Název projektu: Předkládá: Název organizace: TA04011392 Časná detekce karcinomu prsu ultrazvukem F. Šroubek, M. Bartoš, J. Schier,
CVIČNÝ TEST 35. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 35 Mgr. Tomáš Kotler OBSAH I. Cvičný test II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Vypočtěte [( 3 3 ) ( 1 4 5 3 0,5 ) ] : 1 6 1. 1 bod VÝCHOZÍ TEXT K ÚLOZE
CVIČNÝ TEST 35 Mgr. Tomáš Kotler OBSAH I. Cvičný test II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Vypočtěte [( 3 3 ) ( 1 4 5 3 0,5 ) ] : 1 6 1. 1 bod VÝCHOZÍ TEXT K ÚLOZE
PROJEKT 3 2D TRAJEKTORIE KAMERY SEMESTRÁLNÍ PRÁCE DO PŘEDMĚTU MAPV
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Přehledy pro Tabulky Hlavním smyslem této nové agendy je jednoduché řazení, filtrování a seskupování dle libovolných sloupců.
 Přehledy pro Tabulky V programu CONTACT Professional 5 naleznete u firem, osob a obchodních případů záložku Tabulka. Tuto záložku lze rozmnožit, přejmenovat a sloupce je možné definovat dle vlastních požadavků
Přehledy pro Tabulky V programu CONTACT Professional 5 naleznete u firem, osob a obchodních případů záložku Tabulka. Tuto záložku lze rozmnožit, přejmenovat a sloupce je možné definovat dle vlastních požadavků
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly.
, prostá cykloida, prostá epicykloida, úpatnice paraboly.") Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni. Abstrakt
 VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
Práce s texty, Transformace rastru, Připojení GPS
 Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
AutoCAD nastavení výkresu
 Kreslení 2D technické dokumentace AutoCAD nastavení výkresu Ing. Richard Strnka, 2012 Otevření nového souboru - Začít od začátku Pro zobrazení panelu viz obrázek je nutno přepnout proměnnou STARTUP na
Kreslení 2D technické dokumentace AutoCAD nastavení výkresu Ing. Richard Strnka, 2012 Otevření nového souboru - Začít od začátku Pro zobrazení panelu viz obrázek je nutno přepnout proměnnou STARTUP na
Ondřej Baar ( BAA OO6 ) Prezentace ZPG 2008 Kalibrace Barev. Kalibrace Barev. Ondřej Baar 2008 ~ 1 ~
 Prezentace ZPG 2008 Kalibrace Barev. Kalibrace Barev. Ondřej Baar 2008 ~ 1 ~") Kalibrace Barev Ondřej Baar 2008 ~ 1 ~ Úvod do problému: Proč je potřeba kalibrace barev: Při zpracování obrazu může vlivem nejrůznějších nepřesností dojít k rozladění barev. Ty je pak třeba zpětně upravit,
Kalibrace Barev Ondřej Baar 2008 ~ 1 ~ Úvod do problému: Proč je potřeba kalibrace barev: Při zpracování obrazu může vlivem nejrůznějších nepřesností dojít k rozladění barev. Ty je pak třeba zpětně upravit,
ZŠ ÚnO, Bratří Čapků 1332
 Úvodní obrazovka Menu Návrat na hlavní stránku Obsah Výsledky Poznámky Záložky edunet Konec Matematika 2 (pro 9-12 let) LangMaster Obsah (střední část) výběr tématu - dvojklikem v seznamu témat (horní
Úvodní obrazovka Menu Návrat na hlavní stránku Obsah Výsledky Poznámky Záložky edunet Konec Matematika 2 (pro 9-12 let) LangMaster Obsah (střední část) výběr tématu - dvojklikem v seznamu témat (horní
Software Form Control
 Měření na kliknutí myši. Tak jednoduchá je kontrola obrobku v obráběcím centru pomocí měřícího softwaru FormControl. Nezáleží na tom, zda má obrobek obecné 3D kontury nebo běžný 2.5D charakter. Uživatel
Měření na kliknutí myši. Tak jednoduchá je kontrola obrobku v obráběcím centru pomocí měřícího softwaru FormControl. Nezáleží na tom, zda má obrobek obecné 3D kontury nebo běžný 2.5D charakter. Uživatel
CVIČNÝ TEST 15. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
Interaktivní tabule. Obrázek 1-úvodní obrázek
 Interaktivní tabule Obrázek 1-úvodní obrázek Vypracoval: Lukáš Kaňka Datum odevzdání:4.1.2016 1 Co to vlastně je? Interaktivní tabule je velká dotyková plocha, na kterou se z projektoru promítá obrazovka
Interaktivní tabule Obrázek 1-úvodní obrázek Vypracoval: Lukáš Kaňka Datum odevzdání:4.1.2016 1 Co to vlastně je? Interaktivní tabule je velká dotyková plocha, na kterou se z projektoru promítá obrazovka
Základní nastavení. Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010
 13.12.2010") Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Popis ovládání aplikace - Mapový klient KÚPK
 Popis ovládání aplikace - Mapový klient KÚPK Úvodní informace K využívání této aplikace musíte mít ve Vašem internetovém prohlížeči nainstalovaný plugin Adobe Flash Player verze 10 a vyšší. Mapová aplikace
Popis ovládání aplikace - Mapový klient KÚPK Úvodní informace K využívání této aplikace musíte mít ve Vašem internetovém prohlížeči nainstalovaný plugin Adobe Flash Player verze 10 a vyšší. Mapová aplikace
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Volba zobrazení (Direct Current, Scaling) - FFT 1D, FFT 2D
 - FFT 1D, FFT 2D") Volba zobrazení (Direct Current, Scaling) - FFT 1D, FFT 2D Jiří Stančík Fakulta chemická, Vysoké učení technické v Brně Purkyňova 118, 61200 Brno e-mail: HTUxcstancik@fch.vutbr.czUTH Úkolem této práce
Volba zobrazení (Direct Current, Scaling) - FFT 1D, FFT 2D Jiří Stančík Fakulta chemická, Vysoké učení technické v Brně Purkyňova 118, 61200 Brno e-mail: HTUxcstancik@fch.vutbr.czUTH Úkolem této práce
Fergusnova kubika, která je definována pomocí bodu P1, vektoru P1P2, bodu P3 a vektoru P3P4
 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Zelená c. Modrá d. Červená Úloha 2 Jakým minimálním počtem bodů je jednoznačně určena interpolační křivka 5. řádu? a. 6 b. 3 c. 5 d. 7
Která barva nepatří do základních barev prostoru RGB? a. Černá b. Zelená c. Modrá d. Červená Úloha 2 Jakým minimálním počtem bodů je jednoznačně určena interpolační křivka 5. řádu? a. 6 b. 3 c. 5 d. 7
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
3.2. ANALYTICKÁ GEOMETRIE ROVINY
 3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
Gymnázium, Praha 6, Arabská 16. předmět Programování, vyučující Tomáš Obdržálek Lodě Dokumentace ročníkového projektu Martin Karlík, 1E 17.5.
 Gymnázium, Praha 6, Arabská 16 předmět Programování, vyučující Tomáš Obdržálek Lodě Dokumentace ročníkového projektu Martin Karlík, 1E 17.5.2014 Anotace In this school year we had to chose some year project.
Gymnázium, Praha 6, Arabská 16 předmět Programování, vyučující Tomáš Obdržálek Lodě Dokumentace ročníkového projektu Martin Karlík, 1E 17.5.2014 Anotace In this school year we had to chose some year project.
Rozvinutí funkce do Maclaurinova rozvoje
 Rozvinutí funkce do Maclaurinova rozvoje 1.1 Úvod Na přednáškách z matematické analýzy mě zaujala teorie o mocninných řadách a rozvojích, kde jsem zjistil, že každá vhodná funkce lze rozvinout do nekonečné
Rozvinutí funkce do Maclaurinova rozvoje 1.1 Úvod Na přednáškách z matematické analýzy mě zaujala teorie o mocninných řadách a rozvojích, kde jsem zjistil, že každá vhodná funkce lze rozvinout do nekonečné
FORTANNS. havlicekv@fzp.czu.cz 22. února 2010
 FORTANNS manuál Vojtěch Havlíček havlicekv@fzp.czu.cz 22. února 2010 1 Úvod Program FORTANNS je software určený k modelování časových řad. Kód programu má 1800 řádek a je napsán v programovacím jazyku
FORTANNS manuál Vojtěch Havlíček havlicekv@fzp.czu.cz 22. února 2010 1 Úvod Program FORTANNS je software určený k modelování časových řad. Kód programu má 1800 řádek a je napsán v programovacím jazyku
Řešení geometrické úlohy spočívá v nalezení geometrického útvaru (útvarů) daných vlastností.
 daných vlastností.") Řešení geometrické úlohy spočívá v nalezení geometrického útvaru (útvarů) daných vlastností. Metody řešení konstrukčních úloh: množinou bodů zobrazením výpočtem kombinací předchozích způsobů Konstrukční
Řešení geometrické úlohy spočívá v nalezení geometrického útvaru (útvarů) daných vlastností. Metody řešení konstrukčních úloh: množinou bodů zobrazením výpočtem kombinací předchozích způsobů Konstrukční
Vyučovací předmět / ročník: Matematika / 4. Učivo
 Vzdělávací oblast: Matematika a její aplikace Výstupy žáka Vyučovací předmět / ročník: Matematika / 4. ČÍSLO A POČETNÍ OPERACE Zpracoval: Mgr. Dana Štěpánová orientuje se v posloupnosti přirozených čísel
Vzdělávací oblast: Matematika a její aplikace Výstupy žáka Vyučovací předmět / ročník: Matematika / 4. ČÍSLO A POČETNÍ OPERACE Zpracoval: Mgr. Dana Štěpánová orientuje se v posloupnosti přirozených čísel
7.2.12 Vektorový součin I
 7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
Algoritmus pro generování normálních magických čtverců
 1.1 Úvod Algoritmus pro generování normálních magických čtverců Naprogramoval jsem v Matlabu funkci, která dokáže vypočítat magický čtverec libovolného přípustného rozměru. Za pomocí tří algoritmů, které
1.1 Úvod Algoritmus pro generování normálních magických čtverců Naprogramoval jsem v Matlabu funkci, která dokáže vypočítat magický čtverec libovolného přípustného rozměru. Za pomocí tří algoritmů, které
Program for Gas Flow Simulation in Unhinged Material Program pro simulaci proudění plynu v rozrušeném materiálu
 XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 237 Program for Gas Flow Simulation in Unhinged Material Program pro simulaci proudění plynu v rozrušeném materiálu PONČÍK, Josef
XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 237 Program for Gas Flow Simulation in Unhinged Material Program pro simulaci proudění plynu v rozrušeném materiálu PONČÍK, Josef
Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ
 Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ Ing. Michal Švantner, Ph.D. Doc. Ing. Milan Honner, Ph.D. 1/10 Anotace Popisuje se software,
Autorizovaný software DRUM LK 3D SOFTWARE PRO VYHODNOCENÍ MĚŘENÍ ODCHYLEK HÁZIVOSTI BUBNOVÝCH ROTAČNÍCH SOUČÁSTÍ Ing. Michal Švantner, Ph.D. Doc. Ing. Milan Honner, Ph.D. 1/10 Anotace Popisuje se software,
Analytická geometrie lineárních útvarů
 ) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
POROVNÁNÍ NĚKTERÝCH SW PRO ZOBRAZENÍ GRAFU FUNKCE DVOU PROMĚNNÝCH
 POROVNÁNÍ NĚKTERÝCH SW PRO ZOBRAZENÍ GRAFU FUNKCE DVOU PROMĚNNÝCH Martin Fajkus Univerzita Tomáše Bati ve Zlíně, Fakulta aplikované informatiky, Ústav matematiky, Nad Stráněmi 4511, 760 05 Zlín, Česká
POROVNÁNÍ NĚKTERÝCH SW PRO ZOBRAZENÍ GRAFU FUNKCE DVOU PROMĚNNÝCH Martin Fajkus Univerzita Tomáše Bati ve Zlíně, Fakulta aplikované informatiky, Ústav matematiky, Nad Stráněmi 4511, 760 05 Zlín, Česká
Dataprojektory. Parametry projektorů
 Dataprojektory Projektory, neboli audiovizuální média, slouží k přenosu obrazu na promítací plátno či zeď, případně na podobný povrch. Zdrojem obrazu může být osobní počítač, notebook, přehrávač dvd a
Dataprojektory Projektory, neboli audiovizuální média, slouží k přenosu obrazu na promítací plátno či zeď, případně na podobný povrch. Zdrojem obrazu může být osobní počítač, notebook, přehrávač dvd a
Dokumentace programu piskvorek
 Dokumentace programu piskvorek Zápočtového programu z Programování II PRM045 Ondřej Vostal 20. září 2011, Letní semestr, 2010/2011 1 Stručné zadání Napsat textovou hru piškvorky se soupeřem s umělou inteligencí.
Dokumentace programu piskvorek Zápočtového programu z Programování II PRM045 Ondřej Vostal 20. září 2011, Letní semestr, 2010/2011 1 Stručné zadání Napsat textovou hru piškvorky se soupeřem s umělou inteligencí.