Robotický LEGO seminář na FEL ČVUT v Praze
|
|
|
- Jakub Šimek
- před 9 lety
- Počet zobrazení:
Transkript


1 Robotický LEGO seminář na FEL ČVUT v Praze Ing. Martin Hlinovský, Ph.D Bc. Lenka Caletková Filip Kirschner

2 Organizace Robotického LEGO semináře Na začátku se rozdělíte do malých týmů (po 2-3). Každému týmu bude zapůjčen set obsahující základní soupravu LEGO MINDSTORMS Education 9797, soupravu technických dílů 9648 nebo 9695 (doplňkové pasivní díly), síťový adaptér 9833 a gyroskopický senzor (viz obr. 1). V týmech postavíte ze zapůjčených souprav mobilního robota, navrhnete pro něj řízení a naprogramujete ho tak, aby splnil zadanou a dobře kontrolovatelnou úlohu. Ta by měla být atraktivní pro širší publikum, přiměřeně náročná a přitom musí umožnit jednoznačně určit vítěze. Obr. 1 Základní souprava LEGO MINDSTORMS Education 9797, souprava technických dílů 9648 nebo 9695 a síťový adaptér 9833

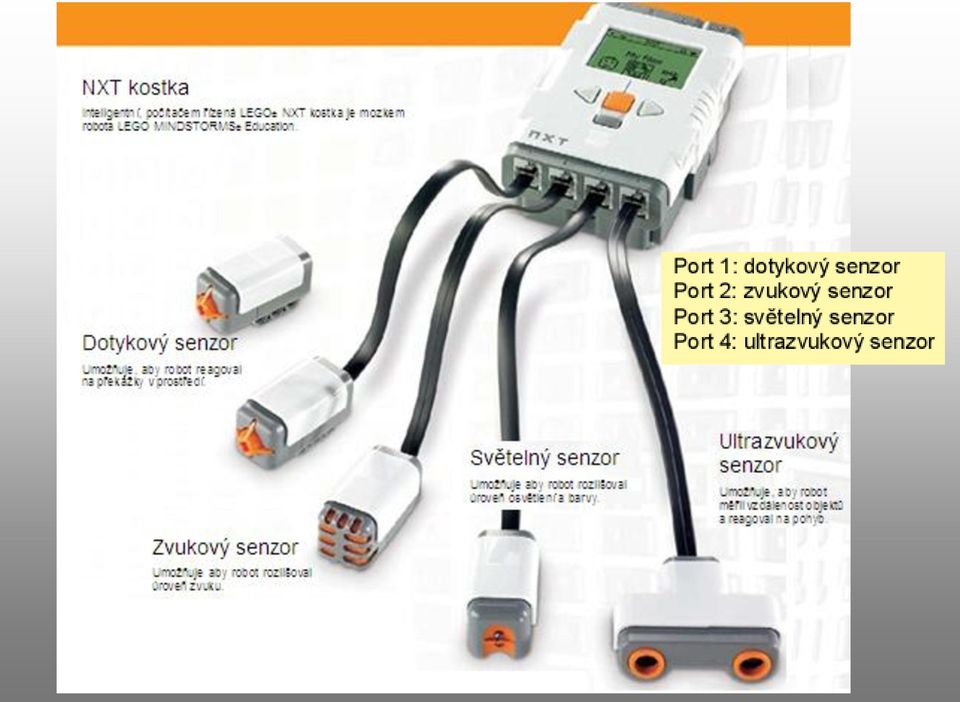
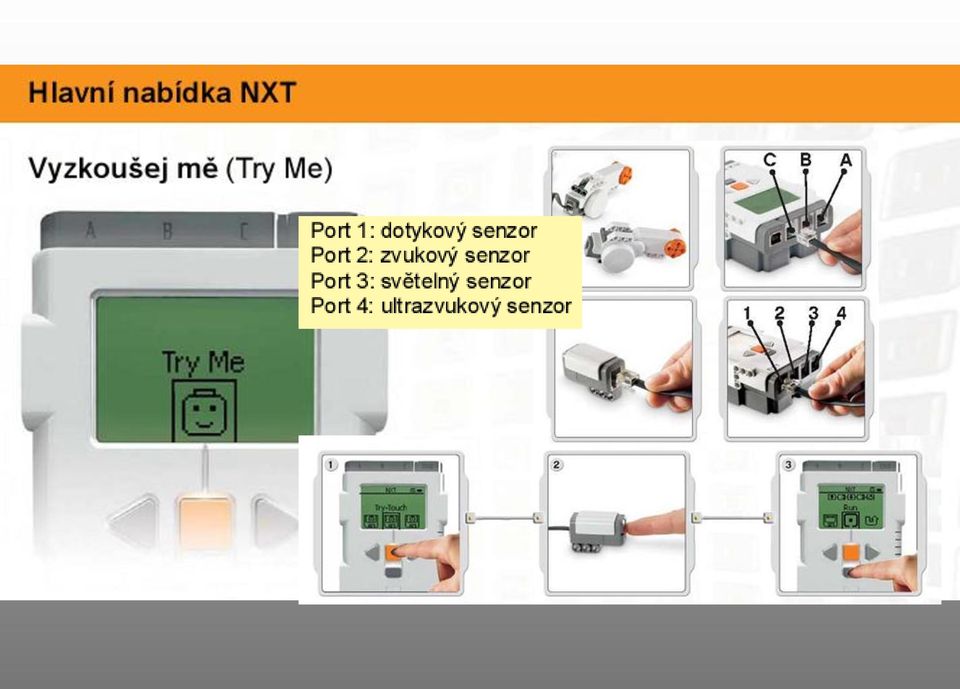
3 Základním prvkem soupravy LEGO MINDSTORMS Education 9797 a současně mozkem celého robota je centrální řídicí jednotka označovaná jako inteligentní LEGO NXT kostka (viz obr. 2) s maticovým displejem 100 x 64 bodů, 4 vstupními porty pro připojení senzorů a 3 výstupními porty pro připojení servomotorů, reproduktorem s 8kHz vzorkovací frekvencí, možností bluetooth bezdrátové komunikace nebo s možností připojení ke 2.0 USB portu. Pomocí 4 tlačítek lze inteligentní kostku a připojená zařízení testovat a omezeně řídit. K inteligentní LEGO NXT kostce lze tedy připojit 3 servomotory, které lze využít zároveň jako senzory pro měření otáček a dále pak dotykový senzor (poskytuje robotu schopnost hmatu), světelný senzor (dává robotu schopnost vidět dokáže pasivně měřit intenzitu světla okolí nebo rozpoznávat různé barvy), zvukový senzor (pomocí tohoto senzoru robot slyší) nebo ultrazvukový senzor (umožňuje robotu orientaci v prostoru, nalézat překážky a určit vzdálenost od nich). Obr. 2 Inteligentní LEGO NXT kostka a připojení senzorů
, světelný senzor")
4

5


 3 výstupní porty (A, B, C)")
6 Inteligentní NXT kostka maticový displej 100 x 64 bodů USB 2.0 port Bluetooth komunikace 4 vstupní porty (1, 2, 3, 4) 3 výstupní porty (A, B, C) reproduktor s 8kHz vzorkovací frekvencí
 3 výstupní porty (A, B, C)")
7
8


9 Interaktivní servomotor lze využít zároveň jako senzor pro měření otáček



10 Dotykový senzor poskytuje robotu schopnost hmatu Ultrazvukový senzor umožňuje robotu orientaci v prostoru, nalézat překážky a určit vzdálenost od nich



11 Světelný senzor dává robotu schopnost vidět dokáže pasivně měřit intenzitu světla okolí nebo rozpoznávat různé barvy Zvukový senzor pomocí tohoto senzoru robot slyší

12 Z hlediska programovacích možností doporučujeme studentům použít jeden z následujících programovacích jazyků: 1. NXT-G tento programovací jazyk dostal jméno z programovacího jazyka využívaného programem LabVIEW, vyvinutého firmou National Instruments, který se jmenuje pouze G. Zkratka G pochází z faktu, že programovací jazyk je grafický. Programy napsané v NXT-G jsou tedy poskládané z grafických bloků pospojovaných dohromady, u kterých se nastavují jejich vlastnosti a posloupnosti. NXT-G je výsledkem práce firem LEGO a National Instruments a je základním programovacím nástrojem pro LEGO MINDSTORMS NXT. Důraz je u NXT-G kladen především na intuitivnost a jednoduchost vývojového prostředí včetně procesu programování tak, aby s robotem mohli pracovat už i žáci základních škol, kteří mají s programováním minimální zkušenosti.


13 2. NXC tento textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO MINDSTORMS. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat jak v NXT-G, tak v NXC, protože s každou změnou programovacího prostředí nemusí do kostky nahrávat nový firmware. Práce s jazykem zkracujícím spojení Not exactly C je velmi příjemná a programátor alespoň trochu znalý jazyka C si díky téměř stejné sémantice v tomto prostředí zvykne programovat velmi snadno. Další výhodou je, že se jedná o freewarovou aplikaci. Jako nevýhodu bych uvedl někdy nepříliš snadné debugování programů. Na rozdíl od NXT-G se jedná o čistě textové programování bez grafických prvků.

14 3. LeJOS-NXJ - tento programovací jazyk je šířený společností Sourceforge zdarma a je k dispozici pro operační systémy Windows, Linux a MAC OS. Díky rozšíření a znalosti jazyka Java mezi programátory si tak velká část uživatelů systému LEGO MINDSTORMS vybírá právě LeJOS NXJ s jeho rozsáhlými knihovnami, které podporují zajímavé funkce robota. Jako nevýhodu bych uvedl nutnost změny firmwaru NXT kostky, který obsahuje Java Virtual Machine a který nahrazuje standardní LEGO firmware. LEGO firmware však může být nahrán do NXT kostky zpět pomocí LEGO softwaru. Je na studentech, zda použijí jeden z námi doporučených programovacích jazyků nebo využijí jiný (např. MATLAB toolbox vyvinutý na univerzitě v Aachenu - produkt pro uživatele zvyklé programovat v Matlabu, RobotC - programovací jazyk založený na programovacím jazyku C, lejos OSEK - programování v ANSI C/C++ nebo jiný).

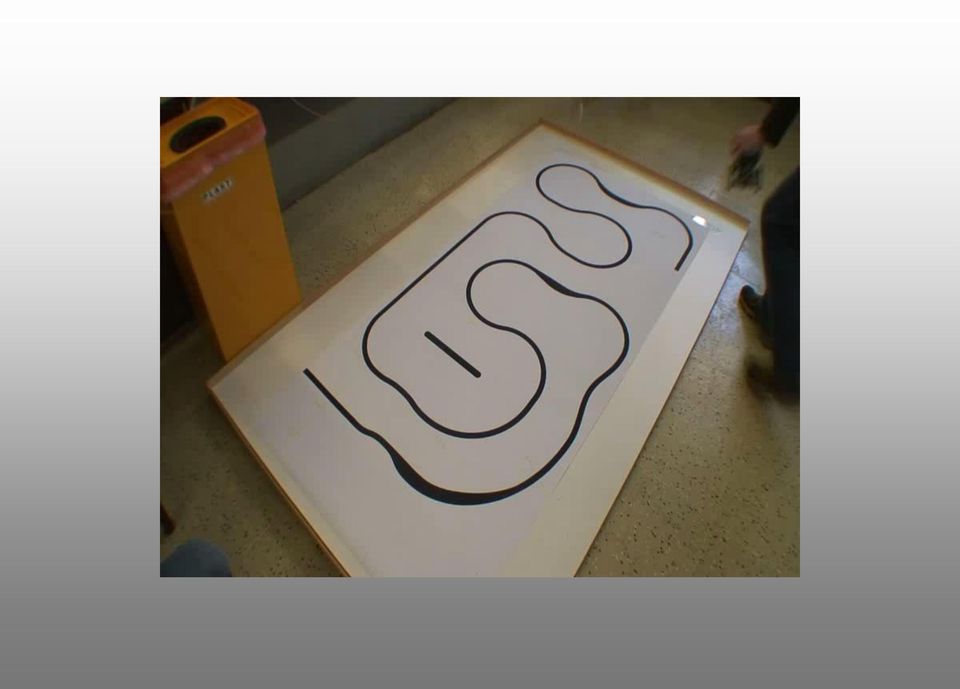
15 Úlohy, které studenti řešili ve školním roce 2009/2010: PROJEKT Č.1 SLEDOVÁNÍ ČÁRY Cílem v této úloze je sestavit a naprogramovat robota tak, aby samostatně, bez jakékoliv další pomoci, projel co nejrychleji stanovenou dráhu podél černé čáry vyznačené na podložce a na konci černé čáry zastavil. Vlastního robota mohli studenti sestavit naprosto libovolně, mohli však využít pouze díly ze zapůjčených souprav. Po třech týdnech příprav, testování a ladění softwaru robotů následovala dvoukolová soutěž všech týmů.

16

17
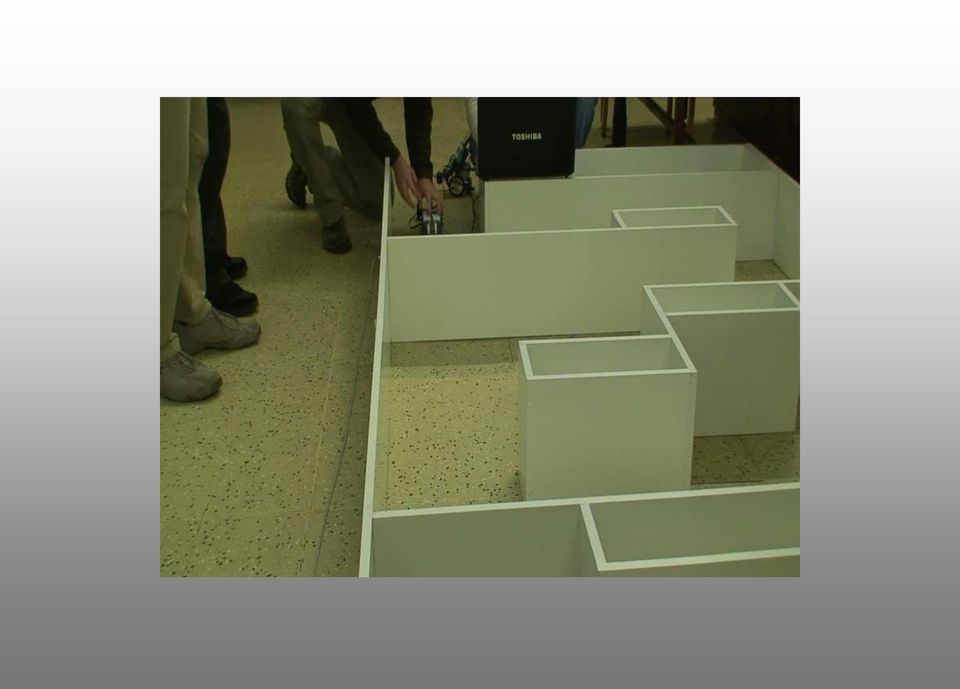
18 PROJEKT Č.2 BLUDIŠTĚ START/ CÍL NEPR ŮCHODNÁ OBLAST STĚNA STARTOVNÍ PROSOR CÍLOVÝ PROSOR Cílem v této druhé úloze bylo sestavit a naprogramovat robota tak, aby samostatně, bez jakékoli další pomoci projel co nejrychleji bludištěm od jeho počátku až na jeho konec. Vlastního robota studenti mohli opět sestavit naprosto libovolně, mohli však využít pouze díly ze zapůjčených souprav. Každý robot musel bludištěm projet od začátku do konce zcela samostatně (bez jakékoliv pomoci a jeho ovládání, např. externě přes bluetooth nebo hlasovými povely).

19 V případě porušení pravidel byl tým okamžitě vyloučen ze soutěže. Minimální vzdálenost mezi dvěma libovolnými stěnami byla vždycky cca 40 cm. Všechny stěny bludiště stály kolmo ke dnu, tzn., že se tam nevyskytovaly žádné nakloněné stěny. Stěny byly rovné a nevyskytovaly se u nich žádná nepředpokládaná zahnutí. Jejich výška byla 28 cm. Čas projetí robotů se měřil pomocí dvou světelných závor umístěných ve startovacím a cílovém prostoru bludiště. Celkový rozměr bludiště bude 330 x 160 cm. Bludiště bylo postavené tak, aby nejkratší cesta mezi startovacím a cílovým prostorem nikdy nevedla zpět ke startovací linii. Průjezd povede stále k cílovému prostoru. Volba senzorů a strategie průjezdu závisí pouze na jednotlivých týmech. Při orientaci v bludišti se roboti samozřejmě můžou dotýkat stěn. Po čtyřech týdnech příprav, testování a ladění softwaru robotů bude následovat opět dvoukolová soutěž všech týmů.

20
21 Úlohy, které studenti řešili ve školním roce 2010/2011: Projekt č.1 sledování čáry a vyhýbání se překážkám Cílem úlohy je sestavit a naprogramovat robot tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) projel co nejrychleji stanovenou dráhu podél černé čáry vyznačené na papírové podložce ze startovní pozice do cílové, zároveň z podložky nesjel a současně během průjezdu drahou se vyhnul překážce, která bude na dráze položená.
22
23 Projekt č.2 SUMO Cílem úlohy je sestavit a naprogramovat robot tak, aby se mohl samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) zúčastnit jako jeden ze soupeřů robotického zápasu SUMO. Na kruhovém hracím poli soutěží vždy dvojice soupeřů (robotů). Úkolem robotu je vytlačit soupeře mimo hrací pole a přitom sám na něm zůstat. Jakmile se jeden ze soupeřů dotkne kteroukoliv svou částí plochy mimo hrací pole, prohrává. To platí i pro případ, že z robotu odpadne jakýkoliv díl, který je následně vytlačen, nebo se sám dotkne plochy mimo hrací pole. Robot musí v soutěži postupovat dle programu samostatně a nesmí být žádným způsobem ovládán.
24
25
26
27 Úlohy, které studenti řešili ve školním roce 2011/2012: Projekt č.1 sledování čáry s křížením Cílem úlohy je sestavit a naprogramovat robot tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) ujel dvě kola vyznačenou dráhou, aniž by se střetl s druhým závodícím robotem.
28
29 Projekt č.2 Balancování s míčkem Cílem úlohy je sestavit a naprogramovat robot s plošinkou tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) převezl co nejrychleji tam zpět po nerovné dráze míček umístěný na plošince. Míček při tom nesmí z plošinky spadnout ani se dotknout jiné části robota.
30
31
32 Úlohy, které studenti řeší v právě probíhajícím školním roce 2012/2013: Projekt č.1 sledování čáry s křížením Cílem úlohy je sestavit a naprogramovat robot tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) projel co nejrychleji stanovenou dráhu vyznačenou na podložce černou čarou a zároveň z podložky nesjel.
33
34 Projekt č.2 Mobilní most Cílem úlohy je sestavit a naprogramovat robot tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) jel po přímé dráze, našel koryto řeky (otvorpříkop v celé šířce dráhy) přes kterou položí mobilní most, přejede po něm na druhou stranu, mobilní most si sebere a v co nejkratším čase s ním dojede do cíle.
35
36
37
38
SEMINÁŘ ROBOTIKA. LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond
 Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond") Gymnázium, Praha 10, Voděradská 2 Projekt OBZORY SEMINÁŘ ROBOTIKA LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond Organizace
Gymnázium, Praha 10, Voděradská 2 Projekt OBZORY SEMINÁŘ ROBOTIKA LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond Organizace
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ MEIV 3.1.1. Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta
 Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.1 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.1 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST. Výklad: Seznámení se se stavebnicí, ukázky jiných projektů a možností stavebnice
 METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
METODICKÝ LIST 1. Název výukové aktivity (tématu): 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:
: 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:") METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
ROBOTICKÝ POPELÁŘ. Jan Dimitrov, Tomáš Kestřánek. VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1
 Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT ROBOTICKÝ POPELÁŘ Jan Dimitrov, Tomáš Kestřánek VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1 Anotace Cílem
Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT ROBOTICKÝ POPELÁŘ Jan Dimitrov, Tomáš Kestřánek VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1 Anotace Cílem
Ovládání robota. Tvorba programu. Tvorba uživatelských profilů.
 Název: Anotace: Ovládání robota. Tvorba programu. Tvorba uživatelských profilů. Popis controlleru jako základního prvku komunikace s robotem. Tvorba programu, pravidla pro tvorbu identifikátorů. Charakteristika
Název: Anotace: Ovládání robota. Tvorba programu. Tvorba uživatelských profilů. Popis controlleru jako základního prvku komunikace s robotem. Tvorba programu, pravidla pro tvorbu identifikátorů. Charakteristika
Programování LEGO robotů pomocí NXC
 Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
ve spolupráci KTIV PdF UP porádá
 ve spolupráci KTIV PdF UP porádá 6. rocník souteže malých robotu RoboTrip 2018 6.12.2018 Místo konání: Katedra technické a informační výchovy Pedagogická fakulta UP Olomouc Žižkovo nám. 5, Olomouc (GPS:
ve spolupráci KTIV PdF UP porádá 6. rocník souteže malých robotu RoboTrip 2018 6.12.2018 Místo konání: Katedra technické a informační výchovy Pedagogická fakulta UP Olomouc Žižkovo nám. 5, Olomouc (GPS:
Využití stavebnice LEGO Mindstorms EV3 nejenom ve výuce technických předmětů
 Využití stavebnice LEGO Mindstorms EV3 nejenom ve výuce technických předmětů Martin Hlinovský 1 e-mail: martin.hlinovsky@fel.cvut.cz 1 České vysoké učení technické v Praze, Fakulta elektrotechnická, katedra
Využití stavebnice LEGO Mindstorms EV3 nejenom ve výuce technických předmětů Martin Hlinovský 1 e-mail: martin.hlinovsky@fel.cvut.cz 1 České vysoké učení technické v Praze, Fakulta elektrotechnická, katedra
Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]
![Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]](/thumbs/35/17243672.jpg "Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]") 2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
DEVĚT LET S ROBOSOUTĚŽÍ
 DEVĚT LET S ROBOSOUTĚŽÍ Martin HLINOVSKÝ 1 Abstract: ROBOCONTEST is a final competition intended for the best students' teams (3-member) in the framework of motivation subject B3B35RO Robots (compulsory
DEVĚT LET S ROBOSOUTĚŽÍ Martin HLINOVSKÝ 1 Abstract: ROBOCONTEST is a final competition intended for the best students' teams (3-member) in the framework of motivation subject B3B35RO Robots (compulsory
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013
 Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
Záznam dat Úvod Záznam dat zahrnuje tři základní funkce: Záznam dat v prostředí třídy Záznam dat s MINDSTORMS NXT
 Úvod Záznam dat umožňuje sběr, ukládání a analýzu údajů ze senzorů. Záznamem dat monitorujeme události a procesy po dobu práce se senzory připojenými k počítači prostřednictvím zařízení jakým je NXT kostka.
Úvod Záznam dat umožňuje sběr, ukládání a analýzu údajů ze senzorů. Záznamem dat monitorujeme události a procesy po dobu práce se senzory připojenými k počítači prostřednictvím zařízení jakým je NXT kostka.
Pavel Koupý. Anti-crash robot
 Pavel Koupý Anti-crash robot Stavba Mezi několika konstrukcemi sem si nakonec zvolil takovou která nejlépe vyhovovala potřebám anticrash robota. Základní konstrukce uvedené v návodu dodávanému k sestavě
Pavel Koupý Anti-crash robot Stavba Mezi několika konstrukcemi sem si nakonec zvolil takovou která nejlépe vyhovovala potřebám anticrash robota. Základní konstrukce uvedené v návodu dodávanému k sestavě
Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování
 Metodické pokyny k materiálu č. 27 Paleta programování - opakování Třída: 8. Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování Obsah
Metodické pokyny k materiálu č. 27 Paleta programování - opakování Třída: 8. Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování Obsah
Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles
 Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles Úkol: 1. Sestrojte podle schématu robota s jedním motorem a ultrazvukovým senzorem. 2. Naprogramujte robota postupně tak, aby se pohyboval
Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles Úkol: 1. Sestrojte podle schématu robota s jedním motorem a ultrazvukovým senzorem. 2. Naprogramujte robota postupně tak, aby se pohyboval
ÚKOLOVÝ LIST. Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU
 ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
Příloha č. 4 - Nabízené zboží a jeho technické podmínky_úprava_ OPVK 1.1
 Příloha č. 4 - Nabízené zboží a jeho technické podmínky_úprava_30.5.2013 OPVK 1.1 Programovatelná stavebnice robotické techniky Minimální technické podmínky Nabízené zboží a jeho technické parametry Řídící
Příloha č. 4 - Nabízené zboží a jeho technické podmínky_úprava_30.5.2013 OPVK 1.1 Programovatelná stavebnice robotické techniky Minimální technické podmínky Nabízené zboží a jeho technické parametry Řídící
Maturitní práce. Název práce: Realizace sad soutěžních úloh FLL 2010
 Střední průmyslová škola a Vyšší odborná škola, Písek Karla Čapka 402, Písek Školní rok: 2012/2013 Kmenový obor: 2643M Elektronika Obor vzdělání: 26-43-M/01 Elektrotechnika Maturitní práce Název práce:
Střední průmyslová škola a Vyšší odborná škola, Písek Karla Čapka 402, Písek Školní rok: 2012/2013 Kmenový obor: 2643M Elektronika Obor vzdělání: 26-43-M/01 Elektrotechnika Maturitní práce Název práce:
Název projektu: Život s počítačem. Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041
 Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika I Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním a
Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika I Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním a
Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol:
 Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro
Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro
PROGRAMOVÁNÍ LEGO MINDSTORMS EV3
 Robotický seminář ČVUT 26. 27. 1. 2018 PROGRAMOVÁNÍ LEGO MINDSTORMS EV3 Štěpánka Baierlová ZŠ a SVČ Sušice Jan Preclík Jiráskovo gymnázium Náchod MOŽNOSTI PROGRAMOVÁNÍ V grafickém prostředí pro začátečníky
Robotický seminář ČVUT 26. 27. 1. 2018 PROGRAMOVÁNÍ LEGO MINDSTORMS EV3 Štěpánka Baierlová ZŠ a SVČ Sušice Jan Preclík Jiráskovo gymnázium Náchod MOŽNOSTI PROGRAMOVÁNÍ V grafickém prostředí pro začátečníky
karet Analogové výstupy (AO) (DIO) karty Zdroje informací
 (DIO) karty Zdroje informací") Ústav fyziky a měřicí techniky 4. 10. 2009 Obsah Měřicí Měřicí Zařízení sloužící pro přímé měření či generování signálu počítačem. Měřicí umožňují zapojení počítače přímo do procesu a spolu s vhodným programovacím
Ústav fyziky a měřicí techniky 4. 10. 2009 Obsah Měřicí Měřicí Zařízení sloužící pro přímé měření či generování signálu počítačem. Měřicí umožňují zapojení počítače přímo do procesu a spolu s vhodným programovacím
L07 Univerzální Robot verze 1.2
 Zeleně jsou čísla pracovních karet a aktivit, kde je možné robota využít. L07 Univerzální Robot verze 1.2 světelné čidlo sledování čáry Z10, J10, P8 P10 dálkově ovládaný robot J11 hledání naleziště P11S
Zeleně jsou čísla pracovních karet a aktivit, kde je možné robota využít. L07 Univerzální Robot verze 1.2 světelné čidlo sledování čáry Z10, J10, P8 P10 dálkově ovládaný robot J11 hledání naleziště P11S
FAQ časté otázky a odpovědi
 FAQ časté otázky a odpovědi EDUXE s.r.o., Velké Pavlovice, distributor LEGO Education pro Českou republiku Překlad originálu LEGO Education EDUXE 2013 Software 1. Terminologie 1.1 Co znamená EV3? EV3 je
FAQ časté otázky a odpovědi EDUXE s.r.o., Velké Pavlovice, distributor LEGO Education pro Českou republiku Překlad originálu LEGO Education EDUXE 2013 Software 1. Terminologie 1.1 Co znamená EV3? EV3 je
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ Katedra řídicí techniky Využití robota LEGO MINDSTORMS při výuce Bakalářská práce Praha 2009 Student: Pavel Trojánek Vedoucí práce: Ing. Martin
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ Katedra řídicí techniky Využití robota LEGO MINDSTORMS při výuce Bakalářská práce Praha 2009 Student: Pavel Trojánek Vedoucí práce: Ing. Martin
Programování NXT - ovládání (pracovní list)
") Zvyšování kvality výuky v přírodních a technických oblastech CZ.1.07/1.128/02.0055 Programování NXT - ovládání (pracovní list) Označení: EU-Inovace-Lego-9 Předmět: Programování a LEGO Roboti Cílová skupina:
Zvyšování kvality výuky v přírodních a technických oblastech CZ.1.07/1.128/02.0055 Programování NXT - ovládání (pracovní list) Označení: EU-Inovace-Lego-9 Předmět: Programování a LEGO Roboti Cílová skupina:
LabVIEW přes 20 let inovací
 LabVIEW přes 20 let inovací LabVIEW - grafické vývojové prostředí pro měření a automatizaci, představené v roce 1986, má za sebou více než 20 let inovací a neustálého vylepšování. Ačkoli bylo prostředí
LabVIEW přes 20 let inovací LabVIEW - grafické vývojové prostředí pro měření a automatizaci, představené v roce 1986, má za sebou více než 20 let inovací a neustálého vylepšování. Ačkoli bylo prostředí
Robot Lego Mindstorms NXT doplněný o kamerku a software v jazyce C#
 Stdoškolská technika 2011 Setkání a prezentace prací stdoškolských studentů na ČVUT Robot Lego Mindstorms NXT doplněný o kamerku a software v jazyce C# Matěj Kaňuk Cíl práce Stdní průmyslová škola elektrotechnická
Stdoškolská technika 2011 Setkání a prezentace prací stdoškolských studentů na ČVUT Robot Lego Mindstorms NXT doplněný o kamerku a software v jazyce C# Matěj Kaňuk Cíl práce Stdní průmyslová škola elektrotechnická
ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ MEIV 3.1.2. Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta
 Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.2 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.2 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY
 Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY NÁZEV PRÁCE PSTCM LEGO Mindstorm Strašidelný hrad DIPLOMOVÁ PRÁCE Bc. Jana Kováčová, Bc. Lukáš Broumský Učitelství pro 2. stupeň
Západočeská univerzita v Plzni FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY NÁZEV PRÁCE PSTCM LEGO Mindstorm Strašidelný hrad DIPLOMOVÁ PRÁCE Bc. Jana Kováčová, Bc. Lukáš Broumský Učitelství pro 2. stupeň
ON-LINE SLEDOVÁNÍ POHYBUJÍCÍHO SE PŘEDMĚTU S VYUŽITÍM DIGITÁLNÍ KAMERY ON-LINE TRACKING OF MOVING OBJECT USING DIGITAL CAMERA
 ON-LINE SLEDOVÁNÍ POHYBUJÍCÍHO SE PŘEDMĚTU S VYUŽITÍM DIGITÁLNÍ KAMERY ON-LINE TRACKING OF MOVING OBJECT USING DIGITAL CAMERA Jan Mareš 1, Lucie Gráfová 2, Aleš Procházka 3 Anotace: Příspěvek popisuje
ON-LINE SLEDOVÁNÍ POHYBUJÍCÍHO SE PŘEDMĚTU S VYUŽITÍM DIGITÁLNÍ KAMERY ON-LINE TRACKING OF MOVING OBJECT USING DIGITAL CAMERA Jan Mareš 1, Lucie Gráfová 2, Aleš Procházka 3 Anotace: Příspěvek popisuje
Arduino Martin Friedl
 Arduino Martin Friedl 1 Obsah Materiály Vlastnosti Programování Aplikace 2 Co je to Arduino? Arduino je otevřená elektronická platforma, založená na uživatelsky jednoduchém hardware a software. Arduino
Arduino Martin Friedl 1 Obsah Materiály Vlastnosti Programování Aplikace 2 Co je to Arduino? Arduino je otevřená elektronická platforma, založená na uživatelsky jednoduchém hardware a software. Arduino
Zápočtový projekt předmětu Robotizace a řízení procesů
 Zápočtový projekt předmětu Robotizace a řízení procesů Zpracovali: Vladimír Doležal, Jiří Blažek Projekt: Robot stopař Cíl projektu: Robot sleduje černou čáru na povrchu, po kterém jede Datum: duben 2015
Zápočtový projekt předmětu Robotizace a řízení procesů Zpracovali: Vladimír Doležal, Jiří Blažek Projekt: Robot stopař Cíl projektu: Robot sleduje černou čáru na povrchu, po kterém jede Datum: duben 2015
Open Roberta Lab. Jan Preclík 1
 1 Jiráskovo gymnázium, Náchod, Řezníčkova 451 Open Roberta Lab Jan Preclík 1 e-mail: preclik@gymnachod.cz Klíčová slova Open Roberta, výuková robotika, grafické programování, Blockly, LEGO Mindstorms,
1 Jiráskovo gymnázium, Náchod, Řezníčkova 451 Open Roberta Lab Jan Preclík 1 e-mail: preclik@gymnachod.cz Klíčová slova Open Roberta, výuková robotika, grafické programování, Blockly, LEGO Mindstorms,
Návod na programování v NXT- G
 Návod na programování v NXT- G 1 Teoretický úvod O programu LEGO MINDSTORMS NXT: Vytvořen podle vzoru programu LabVIEW od společnosti National Instruments Programování založeno na principu drag anddrop
Návod na programování v NXT- G 1 Teoretický úvod O programu LEGO MINDSTORMS NXT: Vytvořen podle vzoru programu LabVIEW od společnosti National Instruments Programování založeno na principu drag anddrop
Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1)
") Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1) Třída: 8. Učivo: Praktický rozbor programu robota Obsah inovativní výuky: Prostřednictvím tohoto materiálu
Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1) Třída: 8. Učivo: Praktický rozbor programu robota Obsah inovativní výuky: Prostřednictvím tohoto materiálu
LEGO Mindstorms Education NXT. Projekt Lego ve výuce informatiky a fyziky. Robotika 1. Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr.
 LEGO Mindstorms Education NXT Projekt Lego ve výuce informatiky a fyziky Robotika 1 Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr. Eva Riessová Obsah O publikaci...4 1. Animace na displeji...5 2. Jízda
LEGO Mindstorms Education NXT Projekt Lego ve výuce informatiky a fyziky Robotika 1 Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr. Eva Riessová Obsah O publikaci...4 1. Animace na displeji...5 2. Jízda
Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA)
") Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky: Prostřednictvím tohoto
Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky: Prostřednictvím tohoto
Měření hlasitosti zvuku. Tematický celek: Světelné a zvukové jevy. Úkol:
 Název: Měření hlasitosti zvuku. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to zvuk a ultrazvuk, jaké jsou jednotky hlasitosti zvuku. 2. Jak funguje zvukový senzor. 3. Navrhni
Název: Měření hlasitosti zvuku. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to zvuk a ultrazvuk, jaké jsou jednotky hlasitosti zvuku. 2. Jak funguje zvukový senzor. 3. Navrhni
Průchod robota labyrintem pomocí dotykového senzoru
 Mendelova zemědělská a lesnická univerzita v Brně Provozně ekonomická fakulta Průchod robota labyrintem pomocí dotykového senzoru Bakalářská práce Vedoucí práce: Ing. Jana Weinlichová Andrea Kosová Brno
Mendelova zemědělská a lesnická univerzita v Brně Provozně ekonomická fakulta Průchod robota labyrintem pomocí dotykového senzoru Bakalářská práce Vedoucí práce: Ing. Jana Weinlichová Andrea Kosová Brno
Měření vzdálenosti pomocí ultrazvuku na vstupu mikropočítače
 Měření vzdálenosti pomocí ultrazvuku na vstupu mikropočítače vzorová úloha (SŠ) Jméno Třída.. Datum.. 1 Teoretický úvod Ultrazvukový snímač vytváří vysokofrekvenční zvukové vlny a zachycuje je zpět odrazem
Měření vzdálenosti pomocí ultrazvuku na vstupu mikropočítače vzorová úloha (SŠ) Jméno Třída.. Datum.. 1 Teoretický úvod Ultrazvukový snímač vytváří vysokofrekvenční zvukové vlny a zachycuje je zpět odrazem
Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I.
 Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I. Tematický celek: Pohyb těles Úkol: Použijte robota sestaveného podle pracovního listu rvs_i_04. 1. Upravte robota tak, aby zastavil v určené
Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I. Tematický celek: Pohyb těles Úkol: Použijte robota sestaveného podle pracovního listu rvs_i_04. 1. Upravte robota tak, aby zastavil v určené
Měření hlasitosti zvuku. Tematický celek: Zvuk. Úkol:
 Název: Měření hlasitosti zvuku. Tematický celek: Zvuk. Úkol: 1. Zopakuj si, co je to zvuk a ultrazvuk, jaké jsou jednotky hlasitosti zvuku. 2. Jak funguje zvukový senzor. 3. Navrhni robota pro měření hlasitosti
Název: Měření hlasitosti zvuku. Tematický celek: Zvuk. Úkol: 1. Zopakuj si, co je to zvuk a ultrazvuk, jaké jsou jednotky hlasitosti zvuku. 2. Jak funguje zvukový senzor. 3. Navrhni robota pro měření hlasitosti
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část:
 Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
NÁVODY KE STAVEBNICI LEGO MINDSTORMS PRO TÝMOVÁ CVIČENÍ V PŘEDMĚTU VÝPOČETNÍ TECHNIKA
 Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní NÁVODY KE STAVEBNICI LEGO MINDSTORMS PRO TÝMOVÁ CVIČENÍ V PŘEDMĚTU VÝPOČETNÍ TECHNIKA Studijní opora Ing. David Fojtík, Ph.D. Ing. Jaromír
Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní NÁVODY KE STAVEBNICI LEGO MINDSTORMS PRO TÝMOVÁ CVIČENÍ V PŘEDMĚTU VÝPOČETNÍ TECHNIKA Studijní opora Ing. David Fojtík, Ph.D. Ing. Jaromír
dodání během 2. pololetí 2013, objednáno bude s měsíčním předstihem
 Max. cena za kus Max. cena za ks Max. celkem za č. Předmět Počet ks bez DPH vč. DPH položky vč. DPH Požadavky 1 počítače do učebny 13 12 500,00 15 125,00 196 625,00 Parametry: dodání během 2. pololetí
Max. cena za kus Max. cena za ks Max. celkem za č. Předmět Počet ks bez DPH vč. DPH položky vč. DPH Požadavky 1 počítače do učebny 13 12 500,00 15 125,00 196 625,00 Parametry: dodání během 2. pololetí
Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA)
") Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Zadávací dokumentace
 Zadávací dokumentace k veřejné zakázce malého rozsahu na dodávky s názvem Nákup robotických stavebnic a ovládacího SW v rámci projektu Podpora přírodovědného a technického vzdělávání na středních školách
Zadávací dokumentace k veřejné zakázce malého rozsahu na dodávky s názvem Nákup robotických stavebnic a ovládacího SW v rámci projektu Podpora přírodovědného a technického vzdělávání na středních školách
Středoškolská technika Robot MEDVĚDÁTOR
 Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robot MEDVĚDÁTOR Vít Janda, Jan Říha Gymnázium Pierra de Coubertina Křižíkovo Náměstí 860, Tábor Obsah Úvod... 3
Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robot MEDVĚDÁTOR Vít Janda, Jan Říha Gymnázium Pierra de Coubertina Křižíkovo Náměstí 860, Tábor Obsah Úvod... 3
Studentská tvůrčí a odborná činnost STOČ 2015
 Studentská tvůrčí a odborná činnost STOČ 2015 POUŽITÍ FUZZY LOGIKY PRO ŘÍZENÍ AUTONOMNÍHO ROBOTA - 2D MAPOVÁNÍ PROSTORU Michal JALŮVKA Ostravská univerzita v Ostravě Dvořákova 7 701 03 Ostrava 23. dubna
Studentská tvůrčí a odborná činnost STOČ 2015 POUŽITÍ FUZZY LOGIKY PRO ŘÍZENÍ AUTONOMNÍHO ROBOTA - 2D MAPOVÁNÍ PROSTORU Michal JALŮVKA Ostravská univerzita v Ostravě Dvořákova 7 701 03 Ostrava 23. dubna
Programování LEGO robotů pomocí NXC
 Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
PROFESIONÁLNÍ METEOROLOGICKÁ STANICE OREGON SCIENTIFIC
 Roman Gajda, Zahradní 14, 701 00 Ostrava 1, CZECH REPUBLIC tel. : (+ 420) 59 661 12 19 tel.: (+420) 603 18 18 41 e-mail: info@garni-meteo.cz PROFESIONÁLNÍ METEOROLOGICKÁ STANICE OREGON SCIENTIFIC Profesionální
Roman Gajda, Zahradní 14, 701 00 Ostrava 1, CZECH REPUBLIC tel. : (+ 420) 59 661 12 19 tel.: (+420) 603 18 18 41 e-mail: info@garni-meteo.cz PROFESIONÁLNÍ METEOROLOGICKÁ STANICE OREGON SCIENTIFIC Profesionální
Přípravek pro demonstraci řízení pohonu MAXON prostřednictvím
 Přípravek pro demonstraci řízení pohonu MAXON prostřednictvím karty Humusoft MF624. (Jan Babjak) Popis přípravku Pro potřeby výuky na katedře robototechniky byl vyvinut přípravek umožňující řízení pohonu
Přípravek pro demonstraci řízení pohonu MAXON prostřednictvím karty Humusoft MF624. (Jan Babjak) Popis přípravku Pro potřeby výuky na katedře robototechniky byl vyvinut přípravek umožňující řízení pohonu
ZADÁVACÍ DOKUMENTACE
 ZADÁVACÍ DOKUMENTACE Název veřejné zakázky: Výpočetní technika pro účely projektu OP VK ZŠ Brno část 2 Název projektu: Ukaž mi směr a já najdu cestu pro své povolání Reg. číslo projektu: CZ.1.07/1.1.16/01.0056
ZADÁVACÍ DOKUMENTACE Název veřejné zakázky: Výpočetní technika pro účely projektu OP VK ZŠ Brno část 2 Název projektu: Ukaž mi směr a já najdu cestu pro své povolání Reg. číslo projektu: CZ.1.07/1.1.16/01.0056
NOVÝ DIAGNOSTICKÝ TESTER DCU 100 UPGRADE KTS 460
 DCU KTS 350 100 PLUS NOVÝ DIAGNOSTICKÝ TESTER DCU 100 UPGRADE DCU 100 PLUS KTS 460 KTS 350 Nástupce KTS 340 KTS 340 Ukončení výroby prosinec 2015 KTS 350 DCU100 plus s integrovanou komunikační kartou KTS
DCU KTS 350 100 PLUS NOVÝ DIAGNOSTICKÝ TESTER DCU 100 UPGRADE DCU 100 PLUS KTS 460 KTS 350 Nástupce KTS 340 KTS 340 Ukončení výroby prosinec 2015 KTS 350 DCU100 plus s integrovanou komunikační kartou KTS
DUM č. 13 v sadě. 29. Inf-5 RoboLab a Lego Mindstorms
 projekt GML Brno Docens DUM č. 13 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
projekt GML Brno Docens DUM č. 13 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
Jak pracovat s LEGO energometrem
 Obnovitelná energie Jak pracovat s LEGO energometrem Obsah 1. Energometr popis zařízení... 3 2. Připojení zásobníku energie... 3 3. Nabití a vybití... 4 3.1 Nabití a vybití s použitím LEGO bateriového
Obnovitelná energie Jak pracovat s LEGO energometrem Obsah 1. Energometr popis zařízení... 3 2. Připojení zásobníku energie... 3 3. Nabití a vybití... 4 3.1 Nabití a vybití s použitím LEGO bateriového
MX-10 pixelový částicový detektor
 MX-10 pixelový částicový detektor Základní charakteristika Autor: Ing. Martin Hönig Základní popis Produkt MX-10 je zařízení využívající hybridní pixelový detektor el. nabitých částic Timepix, vyvinutý
MX-10 pixelový částicový detektor Základní charakteristika Autor: Ing. Martin Hönig Základní popis Produkt MX-10 je zařízení využívající hybridní pixelový detektor el. nabitých částic Timepix, vyvinutý
PC Controlling of MINDSTORMS NXT robot
 Řízení robota MINDSTORMS NXT pomocí PC PC Controlling of MINDSTORMS NXT robot Bc. Michal Procházka Diplomová práce 2008 ABSTRAKT Abstrakt česky Práce se zabývá tvorbou vhodného SW rozhraní pro řízení
Řízení robota MINDSTORMS NXT pomocí PC PC Controlling of MINDSTORMS NXT robot Bc. Michal Procházka Diplomová práce 2008 ABSTRAKT Abstrakt česky Práce se zabývá tvorbou vhodného SW rozhraní pro řízení
Obr. 1. Grafické programovací prostředí LabVIEW
 Úloha č. 1: Měření časové konstanty RC členu Úvod Laboratorní úloha se zabývá měřením časové konstanty RC členu pomocí měřicí karty NI USB-6009, která je přes USB port připojena k počítači a řízena (ovládána)
Úloha č. 1: Měření časové konstanty RC členu Úvod Laboratorní úloha se zabývá měřením časové konstanty RC členu pomocí měřicí karty NI USB-6009, která je přes USB port připojena k počítači a řízena (ovládána)
Varování! Hry jsou nevhodné pro děti do 3 let. Výrobce: BEX Sport AB, Švédsko. Dovozce: STOA-Zahradní minigolf s.r.o.
 Výrobce: BEX Sport AB, Švédsko Dovozce: STOA-Zahradní minigolf s.r.o. Údržba: Skladujte na suchém místě uložené ve vaku/boxu, který je součástí balení. Výrobky odpovídají normě EN-71. Distributor: Varování!
Výrobce: BEX Sport AB, Švédsko Dovozce: STOA-Zahradní minigolf s.r.o. Údržba: Skladujte na suchém místě uložené ve vaku/boxu, který je součástí balení. Výrobky odpovídají normě EN-71. Distributor: Varování!
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY Beetle line Seminární práce z předmětu Principy a systémy techniky Zpracovaly: Bc. Petra Konjatová 12/2010 Bc. Michaela Němcová
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY Beetle line Seminární práce z předmětu Principy a systémy techniky Zpracovaly: Bc. Petra Konjatová 12/2010 Bc. Michaela Němcová
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Autonomní dopravní prostředek Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Autonomní dopravní prostředek Anotace: Úkolem
Konfigurace portů pro MODBUS/JBUS jako RS232 nebo RS485 Řízení dvou nezávislých sériových linek Vhodný pro integraci s hlavními systémy BMS.
 Převodník protokolu MultiCOM 301/302 umožňuje monitorování UPS pomocí protokolu MODBUS/JBUS na sériových linkách RS232 nebo RS485. Navíc řídí druhou nezávislou sériovou linku RS232, kterou lze použít pro
Převodník protokolu MultiCOM 301/302 umožňuje monitorování UPS pomocí protokolu MODBUS/JBUS na sériových linkách RS232 nebo RS485. Navíc řídí druhou nezávislou sériovou linku RS232, kterou lze použít pro
MATLAB a Simulink R2015b
 MATLAB a Simulink R2015b novinky ve výpočetním systému Jan Houška HUMUSOFT s.r.o. houska@humusoft.cz 1 >> 2016 1991 ans = 25 2 Release 2015a a 2015b tradiční dvě vydání do roka březen a září 2015 R2015a
MATLAB a Simulink R2015b novinky ve výpočetním systému Jan Houška HUMUSOFT s.r.o. houska@humusoft.cz 1 >> 2016 1991 ans = 25 2 Release 2015a a 2015b tradiční dvě vydání do roka březen a září 2015 R2015a
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Programování na PC Při programování na PC musíme
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Programování na PC Při programování na PC musíme
První použití notebooku GIGABYTE
 Čeština Gratulujeme Vám ke koupi notebooku GIGABYTE! Tato příručka vás provede nastavením Vašeho notebooku při jeho prvním spuštění. Konečná konfigurace produktu závisí na daném modelu zakoupeném v prodejně.
Čeština Gratulujeme Vám ke koupi notebooku GIGABYTE! Tato příručka vás provede nastavením Vašeho notebooku při jeho prvním spuštění. Konečná konfigurace produktu závisí na daném modelu zakoupeném v prodejně.
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
ZADÁVACÍ DOKUMENTACE. Notebook. Příloha č. 1 k zakázce č. 1/2011
 Příloha č. 1 k zakázce č. 1/2011 ZADÁVACÍ DOKUMENTACE Notebook Počet: 22 Rozměry displeje: 15-16 HDD: alespoň 500 GB Klávesnice s numerickou částí Grafická karta: alespoň 1 GB, nutná podpora i v minoritních
Příloha č. 1 k zakázce č. 1/2011 ZADÁVACÍ DOKUMENTACE Notebook Počet: 22 Rozměry displeje: 15-16 HDD: alespoň 500 GB Klávesnice s numerickou částí Grafická karta: alespoň 1 GB, nutná podpora i v minoritních
Aktivní prvky: síťové karty
 Aktivní prvky: síťové karty 1 Předmět: Téma hodiny: Třída: Počítačové sítě a systémy Aktivní prvky Síťové karty (Network Interface Card) 3. a 4. ročník SŠ technické Autor: Ing. Fales Alexandr Software:
Aktivní prvky: síťové karty 1 Předmět: Téma hodiny: Třída: Počítačové sítě a systémy Aktivní prvky Síťové karty (Network Interface Card) 3. a 4. ročník SŠ technické Autor: Ing. Fales Alexandr Software:
Základy logického řízení
 Základy logického řízení 11/2007 Ing. Jan Vaňuš, doc.ing.václav Vrána,CSc. Úvod Řízení = cílené působení řídicího systému na řízený objekt je členěno na automatické a ruční. Automatickéřízení je děleno
Základy logického řízení 11/2007 Ing. Jan Vaňuš, doc.ing.václav Vrána,CSc. Úvod Řízení = cílené působení řídicího systému na řízený objekt je členěno na automatické a ruční. Automatickéřízení je děleno
Lekce 01 Úvod do algoritmizace
 Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
PŘÍLOHY. PRESTO USB programátor
 PŘÍLOHY PRESTO USB programátor 1. Příručka PRESTO USB programátor Popis indikátorů a ovládacích prvků Zelená LED (ON-LINE) - PRESTO úspěšně komunikuje s PC Žlutá LED (ACTIVE) - právě se komunikuje s uživatelskou
PŘÍLOHY PRESTO USB programátor 1. Příručka PRESTO USB programátor Popis indikátorů a ovládacích prvků Zelená LED (ON-LINE) - PRESTO úspěšně komunikuje s PC Žlutá LED (ACTIVE) - právě se komunikuje s uživatelskou
Hardware Osobní počítač a jeho periferie. Mgr. Lukáš Provazník ZŠ praktická a ZŠ speciální Lomnice nad Popelkou DUM č.: VY_3.
 Hardware Osobní počítač a jeho periferie Mgr. Lukáš Provazník ZŠ praktická a ZŠ speciální Lomnice nad Popelkou DUM č.: VY_3.2_INOVACE_1LP_10 Osobní počítač nebo někdy také PC je tvořeno čtyřmi částmi:
Hardware Osobní počítač a jeho periferie Mgr. Lukáš Provazník ZŠ praktická a ZŠ speciální Lomnice nad Popelkou DUM č.: VY_3.2_INOVACE_1LP_10 Osobní počítač nebo někdy také PC je tvořeno čtyřmi částmi:
Seznámení s Quidy. vstupní a výstupní moduly řízené z PC. 2. srpna 2007 w w w. p a p o u c h. c o m
 vstupní a výstupní moduly řízené z PC 2. srpna 2007 w w w. p a p o u c h. c o m Seznámení s Quidy Katalogový list Vytvořen: 1.8.2007 Poslední aktualizace: 2.8 2007 12:16 Počet stran: 16 2007 Adresa: Strašnická
vstupní a výstupní moduly řízené z PC 2. srpna 2007 w w w. p a p o u c h. c o m Seznámení s Quidy Katalogový list Vytvořen: 1.8.2007 Poslední aktualizace: 2.8 2007 12:16 Počet stran: 16 2007 Adresa: Strašnická
00 - Technická zpráva
 Část dokumentace: SYSTÉM ŘÍZENÍ A DISTRIBUCE AUDIO A VIDEO SIGNÁLŮ ŠKOLÍCÍCH MÍSTNOSTÍ 00 - Technická zpráva Stavba: Investor: Místo stavby: Stupeň: Mendelova univerzita v Brně Mendelova univerzita v Brně
Část dokumentace: SYSTÉM ŘÍZENÍ A DISTRIBUCE AUDIO A VIDEO SIGNÁLŮ ŠKOLÍCÍCH MÍSTNOSTÍ 00 - Technická zpráva Stavba: Investor: Místo stavby: Stupeň: Mendelova univerzita v Brně Mendelova univerzita v Brně
Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA)
") Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Gymnázium a Střední odborná škola, Rokycany, Mládežníků 1115
 Číslo projektu: Gymnázium a Střední odborná škola, Rokycany, Mládežníků 1115 Číslo šablony: 9 Název materiálu: Ročník: Identifikace materiálu: Jméno autora: Předmět: Tématický celek: Anotace: CZ.1.07/1.5.00/34.0410
Číslo projektu: Gymnázium a Střední odborná škola, Rokycany, Mládežníků 1115 Číslo šablony: 9 Název materiálu: Ročník: Identifikace materiálu: Jméno autora: Předmět: Tématický celek: Anotace: CZ.1.07/1.5.00/34.0410
Fyzika - vybavení učebny přírodních věd č. 2
 Fyzika - vybavení učebny přírodních věd č. 2 1 Sestava interaktivní tabule s projektorem na pylonovém pojezdu s postranními otočnými (uzavíratelnými) křídly včetně software. Ovládání tabule dotykem s možností
Fyzika - vybavení učebny přírodních věd č. 2 1 Sestava interaktivní tabule s projektorem na pylonovém pojezdu s postranními otočnými (uzavíratelnými) křídly včetně software. Ovládání tabule dotykem s možností
Osobní počítač. Zpracoval: ict Aktualizace: 10. 11. 2011
 Osobní počítač Zpracoval: ict Aktualizace: 10. 11. 2011 Charakteristika PC Osobní počítač (personal computer - PC) je nástroj člověka pro zpracovávání informací Vyznačuje se schopností samostatně pracovat
Osobní počítač Zpracoval: ict Aktualizace: 10. 11. 2011 Charakteristika PC Osobní počítač (personal computer - PC) je nástroj člověka pro zpracovávání informací Vyznačuje se schopností samostatně pracovat
Využití robota Lego Mindstorms Návrh a realizace speciálních úloh. Usage of the Lego Minstorms Robots Design and realization of the special tasks
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Katedra řídící techniky Využití robota Lego Mindstorms Návrh a realizace speciálních úloh Usage of the Lego Minstorms Robots Design and realization
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Katedra řídící techniky Využití robota Lego Mindstorms Návrh a realizace speciálních úloh Usage of the Lego Minstorms Robots Design and realization
ZADÁVACÍ DOKUMENTACE
 ZADÁVACÍ DOKUMENTACE Název veřejné zakázky: Robotické stavebnice pro účely projektu OP VK EZŠ Brno Název projektu: Ukaž mi směr a já najdu cestu pro své povolání Reg. číslo projektu: CZ.1.07/1.1.16/01.0056
ZADÁVACÍ DOKUMENTACE Název veřejné zakázky: Robotické stavebnice pro účely projektu OP VK EZŠ Brno Název projektu: Ukaž mi směr a já najdu cestu pro své povolání Reg. číslo projektu: CZ.1.07/1.1.16/01.0056
Světlo. Kalibrace světelného senzoru. Tematický celek: Světlo. Úkol:
 Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světlo. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro kalibraci světelného
Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světlo. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro kalibraci světelného
Komunikace s automaty MICROPEL. správa systému lokální a vzdálený přístup do systému vizualizace, umístění souborů vizualizace
 Komunikace s automaty MICROPEL správa systému lokální a vzdálený přístup do systému vizualizace, umístění souborů vizualizace MICROPEL 02/2014 Základní správu automatu tvoří činnosti: Nastavení základních
Komunikace s automaty MICROPEL správa systému lokální a vzdálený přístup do systému vizualizace, umístění souborů vizualizace MICROPEL 02/2014 Základní správu automatu tvoří činnosti: Nastavení základních
Obsah. O autorovi 11 Předmluva 13 Zpětná vazba od čtenářů 14 Errata 14
 Obsah O autorovi 11 Předmluva 13 Zpětná vazba od čtenářů 14 Errata 14 KAPITOLA 1 Úvod k počítači Raspberry Pi 15 Hardware 16 Mikroprocesor Broadcom 2835 / grafický procesor 16 Paměť 18 Konektory počítače
Obsah O autorovi 11 Předmluva 13 Zpětná vazba od čtenářů 14 Errata 14 KAPITOLA 1 Úvod k počítači Raspberry Pi 15 Hardware 16 Mikroprocesor Broadcom 2835 / grafický procesor 16 Paměť 18 Konektory počítače
Matematika v programovacích
 Matematika v programovacích jazycích Pavla Kabelíková am.vsb.cz/kabelikova pavla.kabelikova@vsb.cz Úvodní diskuze Otázky: Jaké programovací jazyky znáte? S jakými programovacími jazyky jste již pracovali?
Matematika v programovacích jazycích Pavla Kabelíková am.vsb.cz/kabelikova pavla.kabelikova@vsb.cz Úvodní diskuze Otázky: Jaké programovací jazyky znáte? S jakými programovacími jazyky jste již pracovali?
Dell Latitude E6400 Informace o nastavení a funkcích
 Informace o výstraze VÝSTRAHA: VAROVÁNÍ upozorňuje na možné poškození majetku a riziko úrazu nebo smrti. Dell Latitude E6400 Informace o nastavení a funkcích 1 2 3 4 24 25 26 27 5 6 23 7 8 9 22 21 20 19
Informace o výstraze VÝSTRAHA: VAROVÁNÍ upozorňuje na možné poškození majetku a riziko úrazu nebo smrti. Dell Latitude E6400 Informace o nastavení a funkcích 1 2 3 4 24 25 26 27 5 6 23 7 8 9 22 21 20 19
Výukový materiál. Bankovní spojení: KB Česká Třebová, č.ú. 42129-611/0100, IČO: 70882380
 Základní škola Česká Třebová, Habrmanova ulice Habrmanova 1500, Česká Třebová, 560 02, tel.: 465534626, fax: 465 534 632, mail : slavik@zs-habrmanova.cz Bankovní spojení: KB Česká Třebová, č.ú. 42129-611/0100,
Základní škola Česká Třebová, Habrmanova ulice Habrmanova 1500, Česká Třebová, 560 02, tel.: 465534626, fax: 465 534 632, mail : slavik@zs-habrmanova.cz Bankovní spojení: KB Česká Třebová, č.ú. 42129-611/0100,
ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ
 Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Úloha: Stmívací jednotka Obor: Elektrikář silnoproud Ročník: 2. Zpracoval: Ing. Jaromír Budín, Ing. Jiří Šima Střední odborná škola Otrokovice, 2010 Projekt je
Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Úloha: Stmívací jednotka Obor: Elektrikář silnoproud Ročník: 2. Zpracoval: Ing. Jaromír Budín, Ing. Jiří Šima Střední odborná škola Otrokovice, 2010 Projekt je
O varováních. Dell Latitude E4200 Informace o instalaci a funkcích technické údaje. Čelní pohled
 O varováních VAROVÁNÍ: VAROVÁNÍ upozorňuje na možné poškození majetku a riziko úrazu nebo smrti. Dell Latitude E4200 Informace o instalaci a funkcích technické údaje Čelní pohled 19 18 1 17 16 15 2 3 14
O varováních VAROVÁNÍ: VAROVÁNÍ upozorňuje na možné poškození majetku a riziko úrazu nebo smrti. Dell Latitude E4200 Informace o instalaci a funkcích technické údaje Čelní pohled 19 18 1 17 16 15 2 3 14