Programování LEGO robotů pomocí NXC
|
|
|
- Blanka Kubíčková
- před 7 lety
- Počet zobrazení:
Transkript
1 Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat jak v NXT-G, tak v NXT, protože s každou změnou programovacího prostředí nemusí do kostky nahrávat nový firmware. Práce s jazykem zkracujícím spojení Not exactly C je velmi příjemná a programátor alespoň trochu znalý jazyka C si díky téměř stejné sémantice v tomto prostředí zvykne programovat velmi snadno. Další výhodou je, že se jedná o freewarovou aplikaci. Jako nevýhodu bych uvedl někdy nepříliš snadné debugování programů. Na rozdíl od NXT-G se jedná o čistě textové programování bez grafických prvků. Vývojové prostředí jazyka zdarma ke stažení na: K dispozici je tutoriál k instalaci i programování robota.

2 Před vlastním spuštěním programu Bricx Command Center je třeba provést základní nastavení.

3 Po stisku tlačítka F9 se objeví okno Templates usnadňující práci Obrazovka Bricx Command Center
. Náš program má jen jednu úlohu, nazvanou main.")
4 Psaní programu: Jdeme psát nový program. Tedy stiskněme New File tlačítko pro vytvoření nového, prázdného okna. Do okna napište příklad uvedený na následujícím obrázku. Na první pohled to vypadá velmi složitě, a tak se na něj podíváme zblízka. Program v NQC sestává z úloh (anglicky task ). Náš program má jen jednu úlohu, nazvanou main. Každý program musí mít úlohu nazvanou main (anglicky hlavní), a tato úloha je zpracovávána při stisknutí tlačítka RUN. Úloha se skládá z množství příkazů, také nazývaných programové kroky (anglicky statement). Všechny programové kroky jsou pomocí složených závorek (tedy znaku { a } ) uzavřeny do skupiny, aby bylo jasné, že všechny patří k této úloze. Každý programový krok je ukončen středníkem. Díky tomu je jasné, kde jeden programový krok končí a začíná druhý. Takže v podstatě každá úloha má strukturu jako v uvedeném příkladu.
5 Program je složen z několika programových řádků (kroků). Nyní je probereme jeden po druhém: OnFwd(OUT_C, 100); Tento řádek říká robotu, aby zapnul výstup C (On Forward Output C), tedy motor připojený na výstup označený C pro pohyb vpřed. Bude se pohybovat maximální rychlostí, nastaveno jako druhý parametr tohoto příkazu 100. Wait(400); Nyní je čas chvíli počkat (Wait). Řádek říká, aby se počkalo 0,4 sekundy. Číslo mezi závorkami, udává počet tiků. Každý tik trvá cca 1/1000 sekundy, takže můžete velice přesně určovat dobu čekání. Ted tedy po 0,4 sekundy program nic nedělá (tzv. spí ) a robot proto pokračuje v pohybu vpřed. OnRev(OUT_C, 100); Robot už ujel dost daleko a tak je čas říci mu, aby jel v opačném směru (On Reverse Output C), tedy zpět. Off(OUT_C); Vypnutí (Off) motoru C. Pravděpodobně jste si všimli barevného značení při psaní programu. Barvy se objevují automaticky. Vše co je v modré barvě, jsou příkazy pro robota, názvy motoru nebo jiných věcí které robot zná. Slovo task je vypsáno tučně, protože je důležitým (rezervovaným) slovem NXC. Další důležitá slova se také objevují tučně, jak později uvidíme. Barvy jsou užitečné, protože už při psaní uvidíme, že jsme neudělali chybu.
 a nahrát do NXT kostky (Download F6) nebo provést obojí současně (Download and Run - CTRL F5).")
6 Uložení programu: Po napsání programu je nutné program uložit Save As.. Pokud ponecháte název programu Untitled, program se normálně zkompiluje a nahraje do NXT kostky, ale nefunguje. Spuštění programu: Po napsání programu je nutné tento program zkompilovat (Compile - F5) a nahrát do NXT kostky (Download F6) nebo provést obojí současně (Download and Run - CTRL F5). Tady můžeme vidět od leva doprava příkazy Compile, Download, START a STOP

7 Chyby v programu: Při psaní programu často vznikají chyby, které překladač při kompilování objeví a upozorní na ně, viz následující příklad.
 Příkaz umožňující opakování (počet opakování je číslo v závorkách). Aby Váš program byl ještě srozumitelnější, je vhodné k němu přidat komentáre.")
8 Definování konstant, zatáčení, opakování příkazů, přidávání komentářů: #define Tento příkaz umožňuje definovat konstantu, která může být použita kdekoliv v programu. Repeat() Příkaz umožňující opakování (počet opakování je číslo v závorkách). Aby Váš program byl ještě srozumitelnější, je vhodné k němu přidat komentáre. Vložíte-li kdekoliv na řádek dvojznak // (dvě lomítka), bude vše za tímto označením překladačem ignorováno a může sloužit jako poznámka či komentář. Víceřádkový komentár muže být vložen mezi dvojznaky /* a */.

9 Použití proměnných: Proměnné jsou jednou z nejdůležitějších částí každého programovacího jazyka. Proměnné jsou místa v paměti, do kterých můžeme ukládat hodnoty. Můžeme tuto hodnotu použít na různých místech a také ji měnit. Vedle zvyšování hodnoty proměnné můžeme také násobit proměnnou číslem použitím operátoru *=, odčítat použitím -= a dělit s pomocí /=. (Poznamenejme jen, že výsledek dělení je zaokrouhlen na nejbližší celé číslo.) Také můžete sčítat jednu proměnnou s druhou a vytvářet mnohem komplikovanější výrazy.

10 Náhodná čísla: Ve všech předchozích příkladech jsme přesně určili, co má robot dělat. Vše je ale mnohem zajímavější, když nevíme, co bude robot dělat. Požadujeme určitou nahodilost v jeho pohybech. V NQC můžeme generovat náhodná čísla. Následující program je používá k jízdě robotu náhodným směrem. Robot jede vpřed po náhodnou dobu a pak provede otočení do náhodného směru. Program definuje dvě proměnné a pak jim přiradí náhodná čísla. Random(60) znamená náhodné číslo mezi 0 a 60 (může to být i 0 i 60). Pokaždé bude hodnota jiná. (Poznamenejme, že při psaní programu jsme se mohli zbavit proměnných použitím konstrukce Wait(Random(60)).) Také zde můžete vidět nový typ cyklu. Místo použití příkazu repeat() jsme napsali while(true). Příkaz while() opakuje příkazy uvedené pod ním do té doby,

11 dokud je podmínka v závorkách splněna (pravdivá). Speciální slovo true je vždy pravda, takže řádky ve složených závorkách budou opakovány neustále, přesně jak jsme chtěli.

12 Příkaz if: Někdy potřebujeme, aby určitá část programu byla vykonána pouze v jisté situaci. V tomto případe použijeme příkaz if(). Opět změníme program se kterým jsme až dosud pracovali, ale nyní to bude novým způsobem. Chceme, aby robot jel nejprve rovně a pak zatočil bud vlevo, nebo vpravo. K tomu opět potřebujeme náhodná čísla. Vezmeme náhodné číslo mezi nulou a jedničkou, tedy to bude buď nula, a nebo jednička. Jestliže bude číslo 0, otočíme se vpravo, jinak se otočíme vlevo.
13 == je rovno s < je menší než <= je menší nebo rovno než > je větší než >= je větší nebo rovno než!= není rovno s true vždy pravda false vždy nepravda ttt!= 3 pravda pokud proměnná ttt není rovna třem (ttt >= 5) && (ttt <= 10) pravda pokud hodnota proměnné leží mezi 5 a 10 (aaa == 10) (bbb == 10) pravda pokud bud aaa, nebo bbb (nebo oba) jsou rovny 10

14 Příkaz do: Příkazy mezi složenými závorkami jsou vykonávány tak dlouho, dokud je podmínka pravdivá (splněna).
15 Touch sensor (dotykový senzor): Jednou z vymožeností Lego robota je možnost připojit k nim senzory (čidla) a pak na ně nechat roboty reagovat. Nyní zkusíme naprogramovat robota k vyhýbání se překážkám. Kdykoli robot do něčeho narazí, necháme ho couvnout maličko zpět, trochu se otočit a pak pokračovat.
16 Light sensor (světelný senzor): Vedle dotykových senzorů také se stavebnicí MindStorms dostanete světelný senzor. Tento senzor měří množství světla přicházející z určitého směru. Světelný senzor také světlo vysílá. Díky tomu je možno namířit jej na nějaký objekt a změřit jeho odrazivost množství světla, které se odrazí zpět k senzoru. To je velmi užitečné, když sestavíme robota na sledování čáry na podlaze.

17 Sound sensor (zvukový senzor): Vedle dotykových senzorů a světelného senzoru také se stavebnicí Mindstorms dostanete zvukový senzor. Následující příklad ukazuje čekání robota na hlasitý zvuk a pohyb robota po dobu tohoto hlasitého zvuku.

18 Ultrasonic sensor (ultrazvukový senzor): Ultrazvukový senzor pracuje jako sonar (ultrazvukový lokátor). V podstatě vysílá ultrazvukové vlny a měří dobu za jak dlouho se odrazí a vrátí tyto vlny zpět od objektu v dohledu. Na základě tohoto času je schopen určit vzdálenost k danému objektu a vyhnout se tak např. překážce. V příkladu jede robot rovně dokud neidentifikuje překážku ve vzdálenosti 15cm, vrátí se o kousek zpět, pootočí se a jede opět rovně, dokud neidentifikuje opět překážku.
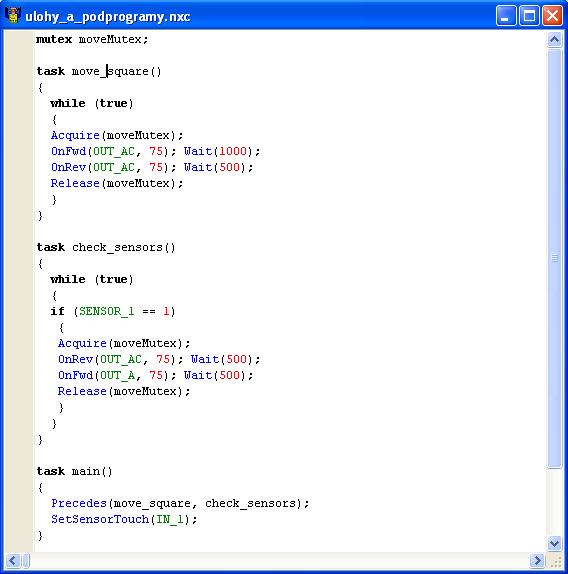
19 Úlohy a podprogramy:
20 Úlohy a podprogramy:
21 Hraní hudby: NXT má vestavěný reproduktor schopný vydávat zvuky a dokonce hrát jednoduchou hudbu. To je užitečné zejména, když chcete, aby Vám NXT řeklo, že se něco děje. Také ale může být zábavné mít robota hrajícího hudbu, zatímco jezdí kolem.

22 Pro tvorbu zajímavější hudby má NXC příkaz PlayTone(). Ten má dva argumenty. První udává frekvenci, druhý délku tónu (v ticích dlouhých 1/1000 sekundy podobně, jako v příkazu wait). Tabulka1 zobrazuje užitečné frekvence. Jak jsme již uvedli v odstavci o zvucích, ani zde NXT nečeká, až nota skončí. Takže pokud hrajete hodně not za sebou, přidejte(raději o něco delší) příkaz wait() mezi nimi. Program je v následujícím příkladu.
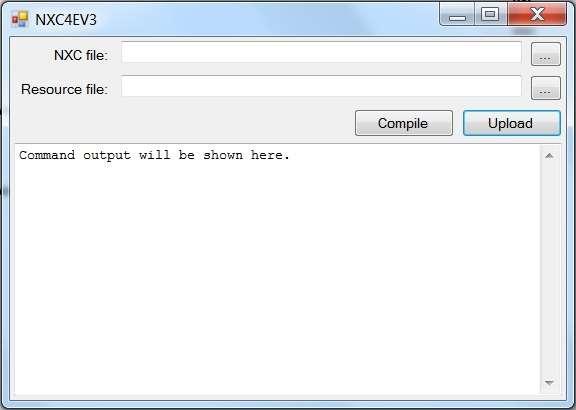
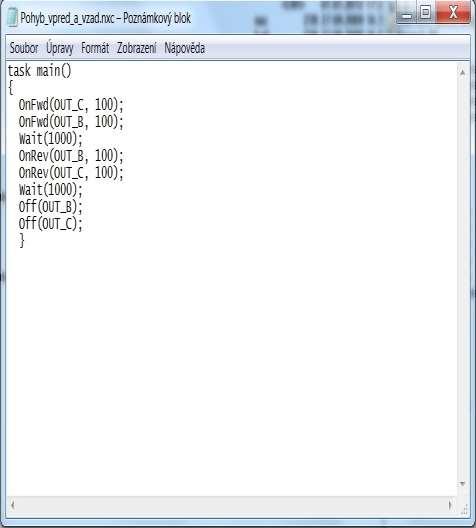
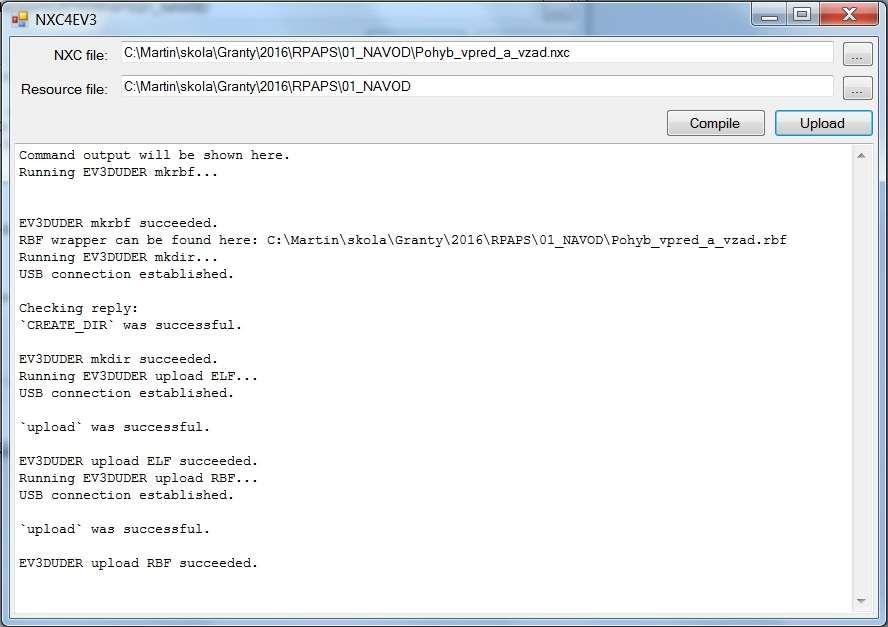
23 NXC4EV3 je nástroj pro spouštění programů napsaných v programovacím jazyce NXC na EV3 kostce. A jak program NXC4EV3 použít? Je to velice jednoduché: 1. Otevřete program NXC4EV3 2. Vyberte zdrojový soubor v jazyce NXC pomocí tlačítka vedle pole pro NXC file použijeme příklad z předchozí kapitoly pro pohyb vpřed a vzad). Resource file se doplní automaticky. Pro editaci zdrojových kódů třeba používat např. původní Bricx Control Center, NXC4EV3 se stará pouze o kompatibilitu s EV3. 3. Pro sestavení klepněte na Compile. Pokud překlad proběhl bez problémů, můžete pokračovat dále. 4. Pro nahrání na EV3 kostku klepněte na Upload. Kostka musí být k počítači připojena přes USB. Pokud nahrání bylo úspěšné, program naleznete na kostce v adresáři, který se jmenuje dle vstupního NXC souboru. NXC4EV3
24


25
26
Programování LEGO robotů pomocí NXC
 Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
Programování LEGO robotů pomocí NXC Textový jazyk odvozený od jazyka C běží v prostředí BricxCC na standardním firmwaru LEGO Mindstorms. Tato skutečnost je velmi příjemná pro ty, kteří chtějí programovat
Programování Lego robotů
 Programování Lego robotů pomocí NQC (verze 3.03 z 2.října 1999) (česká verze 0.99 z 18. dubna 2003) Mark Overmars Department of Computer Science Utrecht University P.O.Box 80.089, 3508 TB Utrecht the Netherlands
Programování Lego robotů pomocí NQC (verze 3.03 z 2.října 1999) (česká verze 0.99 z 18. dubna 2003) Mark Overmars Department of Computer Science Utrecht University P.O.Box 80.089, 3508 TB Utrecht the Netherlands
DUM č. 20 v sadě. 29. Inf-5 RoboLab a Lego Mindstorms
 projekt GML Brno Docens DUM č. 20 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
projekt GML Brno Docens DUM č. 20 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování
 Metodické pokyny k materiálu č. 27 Paleta programování - opakování Třída: 8. Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování Obsah
Metodické pokyny k materiálu č. 27 Paleta programování - opakování Třída: 8. Učivo: Detailnější zopakování používání některých částí uživatelského rozhraní LEGO MINDSTORMS NXT Paleta programování Obsah
Robotický LEGO seminář 11.10-12.10.2013 na FEL ČVUT v Praze
 Robotický LEGO seminář 11.10-12.10.2013 na FEL ČVUT v Praze Ing. Martin Hlinovský, Ph.D Bc. Lenka Caletková Filip Kirschner www.robosoutez.cz Organizace Robotického LEGO semináře Na začátku se rozdělíte
Robotický LEGO seminář 11.10-12.10.2013 na FEL ČVUT v Praze Ing. Martin Hlinovský, Ph.D Bc. Lenka Caletková Filip Kirschner www.robosoutez.cz Organizace Robotického LEGO semináře Na začátku se rozdělíte
1. lekce. do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme:
 1. lekce 1. Minimální program do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme: #include #include int main() { printf("hello world!\n"); return 0; 2.
1. lekce 1. Minimální program do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme: #include #include int main() { printf("hello world!\n"); return 0; 2.
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
1. lekce. do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme:
 1. lekce 1. Minimální program do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme: #include #include int main() { printf("hello world!\n"); return 0; 2.
1. lekce 1. Minimální program do souboru main.c uložíme následující kód a pomocí F9 ho zkompilujeme a spustíme: #include #include int main() { printf("hello world!\n"); return 0; 2.
ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ MEIV 3.1.2. Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta
 Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.2 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.2 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
DUM č. 13 v sadě. 29. Inf-5 RoboLab a Lego Mindstorms
 projekt GML Brno Docens DUM č. 13 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
projekt GML Brno Docens DUM č. 13 v sadě 29. Inf-5 RoboLab a Lego Mindstorms Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV, 3AV, 4AV, 5AV Anotace DUMu: Výuka robotiky a programování pomocí stavebnice
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY Beetle line Seminární práce z předmětu Principy a systémy techniky Zpracovaly: Bc. Petra Konjatová 12/2010 Bc. Michaela Němcová
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA PEDAGOGICKÁ KATEDRA TECHNICKÉ VÝCHOVY Beetle line Seminární práce z předmětu Principy a systémy techniky Zpracovaly: Bc. Petra Konjatová 12/2010 Bc. Michaela Němcová
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
ÚKOLOVÝ LIST. Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU
 ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
Prezentace a vysvětlení programového prostředí NXC
 Úvod Další jazyk, který je možno použít pro programování NXT kostky je NXC Not exatly C Na rozdíl od jazyku NXT-G, kde jsme vytvářeli program pomocí grafických prvků přesněji řečeno pomocí programovacích
Úvod Další jazyk, který je možno použít pro programování NXT kostky je NXC Not exatly C Na rozdíl od jazyku NXT-G, kde jsme vytvářeli program pomocí grafických prvků přesněji řečeno pomocí programovacích
ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ MEIV 3.1.1. Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta
 Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.1 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
Projekt: ODBORNÝ VÝCVIK VE 3. TISÍCILETÍ Téma: MEIV 3.1.1 Souborná činnost na složitých elektronických zařízeních zaměřená na servisní a profesní působení studenta Obor: Mechanik Elektronik Ročník: 4.
1 Návod na instalaci prostředí LeJOS-NXJ a přehrání firmwaru NXT kostky
 1 Návod na instalaci prostředí LeJOS-NXJ a přehrání firmwaru NXT kostky 1. Nainstalujte ovladač na připojení NXJ přes USB rozhraní. Pokud jste nainstalovali software od LEGO Mindstorms, který se k legu
1 Návod na instalaci prostředí LeJOS-NXJ a přehrání firmwaru NXT kostky 1. Nainstalujte ovladač na připojení NXJ přes USB rozhraní. Pokud jste nainstalovali software od LEGO Mindstorms, který se k legu
PROGRAMOVÁNÍ LEGO MINDSTORMS EV3
 Robotický seminář ČVUT 26. 27. 1. 2018 PROGRAMOVÁNÍ LEGO MINDSTORMS EV3 Štěpánka Baierlová ZŠ a SVČ Sušice Jan Preclík Jiráskovo gymnázium Náchod MOŽNOSTI PROGRAMOVÁNÍ V grafickém prostředí pro začátečníky
Robotický seminář ČVUT 26. 27. 1. 2018 PROGRAMOVÁNÍ LEGO MINDSTORMS EV3 Štěpánka Baierlová ZŠ a SVČ Sušice Jan Preclík Jiráskovo gymnázium Náchod MOŽNOSTI PROGRAMOVÁNÍ V grafickém prostředí pro začátečníky
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
Zápočtový projekt předmětu Robotizace a řízení procesů
 Zápočtový projekt předmětu Robotizace a řízení procesů Zpracovali: Vladimír Doležal, Jiří Blažek Projekt: Robot stopař Cíl projektu: Robot sleduje černou čáru na povrchu, po kterém jede Datum: duben 2015
Zápočtový projekt předmětu Robotizace a řízení procesů Zpracovali: Vladimír Doležal, Jiří Blažek Projekt: Robot stopař Cíl projektu: Robot sleduje černou čáru na povrchu, po kterém jede Datum: duben 2015
Pavel Koupý. Anti-crash robot
 Pavel Koupý Anti-crash robot Stavba Mezi několika konstrukcemi sem si nakonec zvolil takovou která nejlépe vyhovovala potřebám anticrash robota. Základní konstrukce uvedené v návodu dodávanému k sestavě
Pavel Koupý Anti-crash robot Stavba Mezi několika konstrukcemi sem si nakonec zvolil takovou která nejlépe vyhovovala potřebám anticrash robota. Základní konstrukce uvedené v návodu dodávanému k sestavě
Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1)
") Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1) Třída: 8. Učivo: Praktický rozbor programu robota Obsah inovativní výuky: Prostřednictvím tohoto materiálu
Metodické pokyny k materiálu č. 39 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (PROGRAM 1) Třída: 8. Učivo: Praktický rozbor programu robota Obsah inovativní výuky: Prostřednictvím tohoto materiálu
Název projektu: Život s počítačem. Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041
 Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika I Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním a
Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika I Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním a
Logické operace. Datový typ bool. Relační operátory. Logické operátory. IAJCE Přednáška č. 3. může nabýt hodnot: o true o false
 Logické operace Datový typ bool může nabýt hodnot: o true o false Relační operátory pravda, 1, nepravda, 0, hodnoty všech primitivních datových typů (int, double ) jsou uspořádané lze je porovnávat binární
Logické operace Datový typ bool může nabýt hodnot: o true o false Relační operátory pravda, 1, nepravda, 0, hodnoty všech primitivních datových typů (int, double ) jsou uspořádané lze je porovnávat binární
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
02. HODINA. 2.1 Typy souborů a objektů. 2.2 Ovládací prvky Label a TextBox
 02. HODINA Obsah: 1. Typy souborů a objektů 2. Ovládací prvky Label a TextBox 3. Základní příkazy a vlastnosti ovládacích prvků 4. Práce s objekty (ovládací prvky a jejich vlastnosti) 2.1 Typy souborů
02. HODINA Obsah: 1. Typy souborů a objektů 2. Ovládací prvky Label a TextBox 3. Základní příkazy a vlastnosti ovládacích prvků 4. Práce s objekty (ovládací prvky a jejich vlastnosti) 2.1 Typy souborů
LEGO Mindstorms Education NXT. Projekt Lego ve výuce informatiky a fyziky. Robotika 1. Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr.
 LEGO Mindstorms Education NXT Projekt Lego ve výuce informatiky a fyziky Robotika 1 Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr. Eva Riessová Obsah O publikaci...4 1. Animace na displeji...5 2. Jízda
LEGO Mindstorms Education NXT Projekt Lego ve výuce informatiky a fyziky Robotika 1 Mgr. Radoslav Jirásek RNDr. Jitka Jirásková Mgr. Eva Riessová Obsah O publikaci...4 1. Animace na displeji...5 2. Jízda
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Sestav si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké zařízení
Informatika 8. třída/6
 Rekurze Jedním z důležitých principů pro návrh procedur je tzv. rekurze. Nejlépe uvidíme tento princip na příkladech dvou velmi jednoduchých procedur (hvězdička označuje násobení). Rekurze vlastně označuje
Rekurze Jedním z důležitých principů pro návrh procedur je tzv. rekurze. Nejlépe uvidíme tento princip na příkladech dvou velmi jednoduchých procedur (hvězdička označuje násobení). Rekurze vlastně označuje
PHP tutoriál (základy PHP snadno a rychle)
") PHP tutoriál (základy PHP snadno a rychle) Druhá, vylepšená offline verze. Připravil Štěpán Mátl, http://khamos.wz.cz Chceš se naučit základy PHP? V tom případě si prostuduj tento rychlý průvodce. Nejdříve
PHP tutoriál (základy PHP snadno a rychle) Druhá, vylepšená offline verze. Připravil Štěpán Mátl, http://khamos.wz.cz Chceš se naučit základy PHP? V tom případě si prostuduj tento rychlý průvodce. Nejdříve
Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA)
") Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Metodické pokyny k materiálu č. 38 Mobilní robot III - Závodní auto - Dálkové ovládání 1 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Comenius Logo. Princip programování. Prostředí Comenius Logo
 Comenius Logo je objektově orientovaný programovací nástroj pracující v prostředí Windows. Byl vyvinut na Slovensku jako nástroj k výuce programování na základních školách. Rozvíjí tvořivost a schopnost
Comenius Logo je objektově orientovaný programovací nástroj pracující v prostředí Windows. Byl vyvinut na Slovensku jako nástroj k výuce programování na základních školách. Rozvíjí tvořivost a schopnost
Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I.
 Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I. Tematický celek: Pohyb těles Úkol: Použijte robota sestaveného podle pracovního listu rvs_i_04. 1. Upravte robota tak, aby zastavil v určené
Název: Řízení pohybu robota ultrazvukovým a tlakovým senzorem I. Tematický celek: Pohyb těles Úkol: Použijte robota sestaveného podle pracovního listu rvs_i_04. 1. Upravte robota tak, aby zastavil v určené
Čtvrtek 3. listopadu. Makra v Excelu. Obecná definice makra: Spouštění makra: Druhy maker, způsoby tvorby a jejich ukládání
 Čtvrtek 3. listopadu Makra v Excelu Obecná definice makra: Podle definice je makro strukturovanou definicí jedné nebo několika akcí, které chceme, aby MS Excel vykonal jako odezvu na nějakou námi definovanou
Čtvrtek 3. listopadu Makra v Excelu Obecná definice makra: Podle definice je makro strukturovanou definicí jedné nebo několika akcí, které chceme, aby MS Excel vykonal jako odezvu na nějakou námi definovanou
SEMINÁŘ ROBOTIKA. LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond
 Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond") Gymnázium, Praha 10, Voděradská 2 Projekt OBZORY SEMINÁŘ ROBOTIKA LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond Organizace
Gymnázium, Praha 10, Voděradská 2 Projekt OBZORY SEMINÁŘ ROBOTIKA LEGO Roboti a jejich programování (teoretická a praktická část) Praha & EU: Investujeme do vaší budoucnosti Evropský sociální fond Organizace
Návod ke cvičení předmětu BPGA ControlLogix
 Návod ke cvičení předmětu BPGA ControlLogix ControlLogix Automat ControlLogix je výrobkem firmy Rockwell Automation. Více informací ohledně tohoto produktu můžete najít na stránkách výrobce www.rockwellautomation.com.
Návod ke cvičení předmětu BPGA ControlLogix ControlLogix Automat ControlLogix je výrobkem firmy Rockwell Automation. Více informací ohledně tohoto produktu můžete najít na stránkách výrobce www.rockwellautomation.com.
KAPITOLA 3 - ZPRACOVÁNÍ TEXTU
 KAPITOLA 3 - ZPRACOVÁNÍ TEXTU KLÍČOVÉ POJMY textové editory formát textu tabulka grafické objekty odrážky a číslování odstavec CÍLE KAPITOLY Pracovat s textovými dokumenty a ukládat je v souborech různého
KAPITOLA 3 - ZPRACOVÁNÍ TEXTU KLÍČOVÉ POJMY textové editory formát textu tabulka grafické objekty odrážky a číslování odstavec CÍLE KAPITOLY Pracovat s textovými dokumenty a ukládat je v souborech různého
METODICKÝ LIST K TECHNICKÉMU KROUŽKU:
 METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
METODICKÝ LIST K TECHNICKÉMU KROUŽKU: Název kroužku: Naprogramuj si svého robota Jméno autora kroužku: Ing. Roman Stark, CSc. Anotace: Ze stavebnice LEGO Mindstorms NXT si postav svého robota nebo nějaké
Comenius Logo. Úterý 20. března. Princip programování. Prostředí Comenius Logo
 Úterý 20. března Comenius Logo je objektově orientovaný programovací nástroj pracující v prostředí Windows. Byl vyvinut na Slovensku jako nástroj k výuce programování na základních školách. Rozvíjí tvořivost
Úterý 20. března Comenius Logo je objektově orientovaný programovací nástroj pracující v prostředí Windows. Byl vyvinut na Slovensku jako nástroj k výuce programování na základních školách. Rozvíjí tvořivost
Celostátní kolo soutěže Mladý programátor 2013, kategorie C, D
 Pokyny: 1. Kategorie C i D řeší úlohy 1, 2, 3. 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který váš tým dostal přidělený (C05, D10
Pokyny: 1. Kategorie C i D řeší úlohy 1, 2, 3. 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který váš tým dostal přidělený (C05, D10
Záznam dat Úvod Záznam dat zahrnuje tři základní funkce: Záznam dat v prostředí třídy Záznam dat s MINDSTORMS NXT
 Úvod Záznam dat umožňuje sběr, ukládání a analýzu údajů ze senzorů. Záznamem dat monitorujeme události a procesy po dobu práce se senzory připojenými k počítači prostřednictvím zařízení jakým je NXT kostka.
Úvod Záznam dat umožňuje sběr, ukládání a analýzu údajů ze senzorů. Záznamem dat monitorujeme události a procesy po dobu práce se senzory připojenými k počítači prostřednictvím zařízení jakým je NXT kostka.
Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles
 Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles Úkol: 1. Sestrojte podle schématu robota s jedním motorem a ultrazvukovým senzorem. 2. Naprogramujte robota postupně tak, aby se pohyboval
Název: Dráha a rychlost pohybu robota I. Tematický celek: Pohyb těles Úkol: 1. Sestrojte podle schématu robota s jedním motorem a ultrazvukovým senzorem. 2. Naprogramujte robota postupně tak, aby se pohyboval
Algoritmizace a programování
 Algoritmizace a programování Řídicí struktury jazyka Java Struktura programu Příkazy jazyka Blok příkazů Logické příkazy Ternární logický operátor Verze pro akademický rok 2012/2013 1 Struktura programu
Algoritmizace a programování Řídicí struktury jazyka Java Struktura programu Příkazy jazyka Blok příkazů Logické příkazy Ternární logický operátor Verze pro akademický rok 2012/2013 1 Struktura programu
Regionální kolo soutěže Baltík 2009, kategorie A a B
 Pokyny: 1. Kategorie A řeší pouze úlohy 1, 2, 3 a kategorie B pouze úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
Pokyny: 1. Kategorie A řeší pouze úlohy 1, 2, 3 a kategorie B pouze úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
ANOTACE vytvořených/inovovaných materiálů
 ANOTACE vytvořených/inovovaných materiálů Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Formát Druh učebního materiálu Druh interaktivity CZ.1.07/1.5.00/34.0722 III/2 Inovace a
ANOTACE vytvořených/inovovaných materiálů Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Formát Druh učebního materiálu Druh interaktivity CZ.1.07/1.5.00/34.0722 III/2 Inovace a
Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA)
") Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky: Prostřednictvím tohoto
Metodické pokyny k materiálu č. 35 Mobilní robot III - Závodní auto (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky: Prostřednictvím tohoto
Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]
![Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]](/thumbs/35/17243672.jpg "Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Obr. 1: Brick s moduly [3]") 2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
2. Popis robota NXT Cílem této kapitoly je seznámit s parametry a moduly stavebnice NXT. Klíčové pojmy: Stavebnice, moduly, CPU, firmware, komunikace, brick. Nejdůležitější součástkou stavebnice je kostka
První kroky s METEL IEC IDE
 První kroky s poskytuje programování v IEC 61131-3 jazycích, podporuje jak grafickou tak textovou podobu. Umožňuje vytvářet, upravovat a ladit IEC 61131-3 (ST, LD, IL, FBD) programy pro řídicí jednotky
První kroky s poskytuje programování v IEC 61131-3 jazycích, podporuje jak grafickou tak textovou podobu. Umožňuje vytvářet, upravovat a ladit IEC 61131-3 (ST, LD, IL, FBD) programy pro řídicí jednotky
Vstupy a výstupy základní sady modulů
 Vstupy a výstupy základní ------------------------------------------------------------------------------------------------------------------------ Vstupy a výstupy základní moduly a jejich vstupy a výstupy.
Vstupy a výstupy základní ------------------------------------------------------------------------------------------------------------------------ Vstupy a výstupy základní moduly a jejich vstupy a výstupy.
Regionální kolo soutěže Mladý programátor 2012, kategorie A, B
 Pokyny: 1. Kategorie A řeší jen úlohy 1, 2, 3 a kategorie B jen úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
Pokyny: 1. Kategorie A řeší jen úlohy 1, 2, 3 a kategorie B jen úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
Programování v jazyku LOGO - úvod
 Programování v jazyku LOGO - úvod Programovací jazyk LOGO je určen pro výuku algoritmizace především pro děti školou povinné. Programovací jazyk pracuje v grafickém prostředí, přičemž jednou z jeho podstatných
Programování v jazyku LOGO - úvod Programovací jazyk LOGO je určen pro výuku algoritmizace především pro děti školou povinné. Programovací jazyk pracuje v grafickém prostředí, přičemž jednou z jeho podstatných
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 Vzorový příklad pro práci v prostředí MPLAB Zadání: Vytvořte program, který v intervalu 200ms točí doleva obsah registru reg, a který při stisku tlačítka RB0 nastaví bit 0 v registru reg na hodnotu 1.
Vzorový příklad pro práci v prostředí MPLAB Zadání: Vytvořte program, který v intervalu 200ms točí doleva obsah registru reg, a který při stisku tlačítka RB0 nastaví bit 0 v registru reg na hodnotu 1.
2.1 Podmínka typu case Cykly Cyklus s podmínkou na začátku Cyklus s podmínkou na konci... 5
 Obsah Obsah 1 Řídicí struktury 1 2 Podmínka 1 2.1 Podmínka typu case......................... 2 3 Příkaz skoku 3 4 Cykly 4 4.1 Cyklus s podmínkou na začátku................... 4 4.2 Cyklus s podmínkou
Obsah Obsah 1 Řídicí struktury 1 2 Podmínka 1 2.1 Podmínka typu case......................... 2 3 Příkaz skoku 3 4 Cykly 4 4.1 Cyklus s podmínkou na začátku................... 4 4.2 Cyklus s podmínkou
MAXScript výukový kurz
 MAXScript výukový kurz Díl čtvrtý jazyk MAXScript, část I. Jan Melichar, březen 2008 Jan Melichar (aka JME) strana 1 OBSAH ÚVOD... 4 ZÁKLADNÍ PŘÍKAZY... 5 OPERÁTORY... 6 PROMĚNNÉ... 6 POLE... 7 ZÁVĚREM...
MAXScript výukový kurz Díl čtvrtý jazyk MAXScript, část I. Jan Melichar, březen 2008 Jan Melichar (aka JME) strana 1 OBSAH ÚVOD... 4 ZÁKLADNÍ PŘÍKAZY... 5 OPERÁTORY... 6 PROMĚNNÉ... 6 POLE... 7 ZÁVĚREM...
Mezinárodní kolo soutěže Baltík 2010, kategorie C a D
 Pokyny: 1. Pracovat můžete v ikonkových režimech nebo v režimech C#, ani jedna z variant nebude při hodnocení zvýhodněna. 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače.
Pokyny: 1. Pracovat můžete v ikonkových režimech nebo v režimech C#, ani jedna z variant nebude při hodnocení zvýhodněna. 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače.
Návod na tvorbu časové přímky v programu Microsoft PowerPoint 2013
 Návod na tvorbu časové přímky v programu Microsoft PowerPoint 2013 1 Obsah 1 OBSAH... 1 2 ÚVOD... 1 3 OTEVŘENÍ PREZENTACE MICROSOFT POWERPOINT 2013... 2 4 ULOŽENÍ DOKUMENTU... 3 5 FORMÁT PROJEKTU... 4
Návod na tvorbu časové přímky v programu Microsoft PowerPoint 2013 1 Obsah 1 OBSAH... 1 2 ÚVOD... 1 3 OTEVŘENÍ PREZENTACE MICROSOFT POWERPOINT 2013... 2 4 ULOŽENÍ DOKUMENTU... 3 5 FORMÁT PROJEKTU... 4
6 Příkazy řízení toku
 6 Příkazy řízení toku Studijní cíl Tento studijní blok má za cíl pokračovat v základních prvcích jazyka Java. Konkrétně bude věnována pozornost příkazům pro řízení toku programu. Pro všechny tyto základní
6 Příkazy řízení toku Studijní cíl Tento studijní blok má za cíl pokračovat v základních prvcích jazyka Java. Konkrétně bude věnována pozornost příkazům pro řízení toku programu. Pro všechny tyto základní
Vzorce. StatSoft. Vzorce. Kde všude se dá zadat vzorec
 StatSoft Vzorce Jistě se Vám již stalo, že data, která máte přímo k dispozici, sama o sobě nestačí potřebujete je nějak upravit, vypočítat z nich nějaké další proměnné, provést nějaké transformace, Jinak
StatSoft Vzorce Jistě se Vám již stalo, že data, která máte přímo k dispozici, sama o sobě nestačí potřebujete je nějak upravit, vypočítat z nich nějaké další proměnné, provést nějaké transformace, Jinak
Sekvenční a podmíněné provádění
 Programování v Bourne shellu Sekvenční a podmíněné provádění Sekvenční provádění znamená vykonávání jednoho příkazu za druhým bez ohledu na okolnosti. Pro oddělení příkazů při sekvenčním provádění se používá
Programování v Bourne shellu Sekvenční a podmíněné provádění Sekvenční provádění znamená vykonávání jednoho příkazu za druhým bez ohledu na okolnosti. Pro oddělení příkazů při sekvenčním provádění se používá
1. Zapnutí a vypnutí 2. Přidání režimu do seznamu provedení
 1. Zapnutí a vypnutí Pro zapnutí udržujte tlačítko stisknuté, dokud se neozve zvukový signál. Vypnout přístroj je možné dvěma způsoby: 1. Prostřednictvím menu: Po krátkém stisknutí tlačítka vypnutí se
1. Zapnutí a vypnutí Pro zapnutí udržujte tlačítko stisknuté, dokud se neozve zvukový signál. Vypnout přístroj je možné dvěma způsoby: 1. Prostřednictvím menu: Po krátkém stisknutí tlačítka vypnutí se
Ovládání robota. Tvorba programu. Tvorba uživatelských profilů.
 Název: Anotace: Ovládání robota. Tvorba programu. Tvorba uživatelských profilů. Popis controlleru jako základního prvku komunikace s robotem. Tvorba programu, pravidla pro tvorbu identifikátorů. Charakteristika
Název: Anotace: Ovládání robota. Tvorba programu. Tvorba uživatelských profilů. Popis controlleru jako základního prvku komunikace s robotem. Tvorba programu, pravidla pro tvorbu identifikátorů. Charakteristika
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013
 Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
Formátování pomocí stylů
 Styly a šablony Styly, šablony a témata Formátování dokumentu pomocí standardních nástrojů (přímé formátování) (Podokno úloh Zobrazit formátování): textu jsou přiřazeny parametry (font, velikost, barva,
Styly a šablony Styly, šablony a témata Formátování dokumentu pomocí standardních nástrojů (přímé formátování) (Podokno úloh Zobrazit formátování): textu jsou přiřazeny parametry (font, velikost, barva,
METODICKÝ LIST. Výklad: Seznámení se se stavebnicí, ukázky jiných projektů a možností stavebnice
 METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
Stručný návod k programu Octave
 Stručný návod k programu Octave Octave je interaktivní program vhodný pro technické výpočty. Je nápadně podobný programu MATLAB, na rozdíl od něho je zcela zadarmo. Jeho domovská vebová stránka je http://www.octave.org/,
Stručný návod k programu Octave Octave je interaktivní program vhodný pro technické výpočty. Je nápadně podobný programu MATLAB, na rozdíl od něho je zcela zadarmo. Jeho domovská vebová stránka je http://www.octave.org/,
Micro:bit lekce 3. - Konstrukci If Then a If Then Else najdete v kategorii Logic - Podmínky od If (např. porovnání < >= atd.) najdete taktéž v Logic
 najdete taktéž v Logic") Micro:bit lekce 3. Podmínky - Rozvětvení běhu programu podle splnění nějakých podmínek typu pravda / nepravda - splněno / nesplněno (výsledkem podmínky musí být vždy jen dvě možnosti) - Dva typy podmínek:
Micro:bit lekce 3. Podmínky - Rozvětvení běhu programu podle splnění nějakých podmínek typu pravda / nepravda - splněno / nesplněno (výsledkem podmínky musí být vždy jen dvě možnosti) - Dva typy podmínek:
Práce se styly 1. Styl
 Práce se styly 1. Styl Styl se používá, pokud chceme, aby dokument měl jednotný vzhled odstavců. Můžeme si nadefinovat styly pro různé úrovně nadpisů, jednotlivé popisy, charakteristiky a další odstavce.
Práce se styly 1. Styl Styl se používá, pokud chceme, aby dokument měl jednotný vzhled odstavců. Můžeme si nadefinovat styly pro různé úrovně nadpisů, jednotlivé popisy, charakteristiky a další odstavce.
1 Stiskněte. Zapnutí zdroje zvuku. Zapnutí zdroje zvuku. Vypnutí režimu zvuku. Displej obrazovky ovládání zvuku
 Zapnutí zdroje zvuku Zapnutí zdroje zvuku Vypnutí režimu zvuku Stiskněte. Stiskněte. Vyberte zvukový režim, který chcete použít. Klepněte na Audio Off. Opětovným klepnutím na Audio Off začnete přijímat
Zapnutí zdroje zvuku Zapnutí zdroje zvuku Vypnutí režimu zvuku Stiskněte. Stiskněte. Vyberte zvukový režim, který chcete použít. Klepněte na Audio Off. Opětovným klepnutím na Audio Off začnete přijímat
Název projektu: Život s počítačem. Číslo projektu: OPVK.CZ.1.07/1.2.32/
 Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika III. Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním
Název projektu: Život s počítačem Číslo projektu: OPVK.CZ.1.07/1.2.32/01.0041 Metodické pokyny k pracovnímu listu Projektový den Robotika III. Žáci se seznámí s robotem Lego Mindstorms, s jeho stavěním
Stažení programu. JBB on-line na počítači. On-line knihovna. výukových souborů. pro mobily, tablety a internet nyní zdarma. Registrace/přihlášení
 Stažení programu Program Jazyky bez bariér pro smartphone, iphone, tablety s operačním systémem Android a ipad si můžete zdarma stáhnout www.jazyky-bez-barier.cz/download pro mobily, tablety a internet
Stažení programu Program Jazyky bez bariér pro smartphone, iphone, tablety s operačním systémem Android a ipad si můžete zdarma stáhnout www.jazyky-bez-barier.cz/download pro mobily, tablety a internet
Stručný postup k použití programu PL7 Junior (programování TSX Micro)
") Stručný postup k použití programu PL7 Junior (programování TSX Micro) 1. Připojení PLC TSX Micro k počítači Kabel, trvale zapojený ke konektoru TER PLC, je nutné zapojit na sériový port PC. 2. Spuštění
Stručný postup k použití programu PL7 Junior (programování TSX Micro) 1. Připojení PLC TSX Micro k počítači Kabel, trvale zapojený ke konektoru TER PLC, je nutné zapojit na sériový port PC. 2. Spuštění
Micro:bit lekce 4. Cyklus s určeným počtem opakování cyklus Repeat. Cyklus s počtem opakování daným řídicí proměnnou cyklus For from to
 Micro:bit lekce 4. Cykly (iterační příkazy) - Opakují dokola několikrát kus programu, potom program pokračuje dál. - Buď předem určeným počtem kolikrát, nebo do splnění nějaké podmínky. - Bloky cyklů najdeme
Micro:bit lekce 4. Cykly (iterační příkazy) - Opakují dokola několikrát kus programu, potom program pokračuje dál. - Buď předem určeným počtem kolikrát, nebo do splnění nějaké podmínky. - Bloky cyklů najdeme
setup() { I = 0; } loop() { I = I + 1; }
 { I = 0; } loop() { I = I + 1; }") PŘERUŠENÍ Procesor pracuje tak, že načítá z paměti jednotlivé instrukce a ty následně zpracovává. Instrukce se zpracovávají v pořadí v jakém jsou uloženy v paměti. Vezměme jednoduchý program, který v nekonečném
PŘERUŠENÍ Procesor pracuje tak, že načítá z paměti jednotlivé instrukce a ty následně zpracovává. Instrukce se zpracovávají v pořadí v jakém jsou uloženy v paměti. Vezměme jednoduchý program, který v nekonečném
Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA)
") Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
Metodické pokyny k materiálu č. 41 Mobilní robot III - Závodní auto - Dálkové ovládání 2 (STAVBA) Třída: 8. Učivo: Praktická stavba robota se stavebnicí LEGO Mindstorms NXT 2.0 Obsah inovativní výuky:
POZOR!!! INSTALACE POD WINDOWS 200 / XP / VISTA PROBÍHÁ VE DVOU ETAPÁCH A JE NUTNÉ DOKON
 Program SK2 Připojení adaptérusk2 k počítači Propojte svůj počítač pomocí přiloženého propojovacího USB kabelu s adaptérem SK2. SK2 v prostředí Windows 2000 - XP - Vista - po propojení počítače s adaptérem
Program SK2 Připojení adaptérusk2 k počítači Propojte svůj počítač pomocí přiloženého propojovacího USB kabelu s adaptérem SK2. SK2 v prostředí Windows 2000 - XP - Vista - po propojení počítače s adaptérem
Programování v jazyce VISUAL BASIC.NET
 GYMNÁZIUM ŠTERNBERK Programování v jazyce VISUAL BASIC.NET JAROSLAV ZAVADIL 1. ČÁST ŠTERNBERK 2009 1 / 51 1. kapitola Úvod V následujících kapitolách se seznámíme s ukázkou programování ve vyšším programovacím
GYMNÁZIUM ŠTERNBERK Programování v jazyce VISUAL BASIC.NET JAROSLAV ZAVADIL 1. ČÁST ŠTERNBERK 2009 1 / 51 1. kapitola Úvod V následujících kapitolách se seznámíme s ukázkou programování ve vyšším programovacím
DUM č. 5 v sadě. 30. Inf-6 Imagine Logo a animace pro nižší gymnázium
 projekt GML Brno Docens DUM č. 5 v sadě 30. Inf-6 Imagine Logo a animace pro nižší gymnázium Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV Anotace DUMu: Imagine Logo je vývojové prostředí s
projekt GML Brno Docens DUM č. 5 v sadě 30. Inf-6 Imagine Logo a animace pro nižší gymnázium Autor: Hana Křetínská Datum: 25.06.2014 Ročník: 1AV, 2AV Anotace DUMu: Imagine Logo je vývojové prostředí s
Program GazSMS návod k použití
 Program GazSMS návod k použití KADATEC s.r.o. Příprava před spuštěním programu Instalace programu není nutná, pouze se nahraje celý adresář Gaz např. na disk C:\ nebo na plochu. Je možné si také vytvořit
Program GazSMS návod k použití KADATEC s.r.o. Příprava před spuštěním programu Instalace programu není nutná, pouze se nahraje celý adresář Gaz např. na disk C:\ nebo na plochu. Je možné si také vytvořit
Návod na používání Digitálního povodňového plánu povodňové komise
 Návod na používání Digitálního povodňového plánu povodňové komise Obsah: 1. Spuštění programu 2. Změny údajů v povodňových komisích 3. Další možnost editace změn u osob 4. Zápis nových členů povodňových
Návod na používání Digitálního povodňového plánu povodňové komise Obsah: 1. Spuštění programu 2. Změny údajů v povodňových komisích 3. Další možnost editace změn u osob 4. Zápis nových členů povodňových
NÁVOD K OVLÁDÁNÍ PÁLÍCÍHO STROJE A ŘÍDÍCÍHO SYSTÉMU RIPAST 401
 NÁVOD K OVLÁDÁNÍ PÁLÍCÍHO STROJE A ŘÍDÍCÍHO SYSTÉMU RIPAST 401 Start stroje Stroj se uvádí do provozu stisknutím talčítka START na ovládacím panelu. Po zapnutí stroje a načtení operačního systému se objeví
NÁVOD K OVLÁDÁNÍ PÁLÍCÍHO STROJE A ŘÍDÍCÍHO SYSTÉMU RIPAST 401 Start stroje Stroj se uvádí do provozu stisknutím talčítka START na ovládacím panelu. Po zapnutí stroje a načtení operačního systému se objeví
Kreslící program. V této lekci se naučíš vytvořit si vlastní kreslící program! Následujte postupně tyto INSTRUKCE
 Scratch 1 Kreslící program Všechny Kódovací kluby - Code Clubs musí být registrovány. Tím, že zaregistrujete váš klub, můžeme měřit náš dosah, a můžeme tak pokračovat s poskytováním zdrojů pro výuku programování
Scratch 1 Kreslící program Všechny Kódovací kluby - Code Clubs musí být registrovány. Tím, že zaregistrujete váš klub, můžeme měřit náš dosah, a můžeme tak pokračovat s poskytováním zdrojů pro výuku programování
DSL manuál. Ing. Jan Hranáč. 27. října 2010. V této kapitole je stručný průvodce k tvorbě v systému DrdSim a (v
 DSL manuál Ing. Jan Hranáč 27. října 2010 V této kapitole je stručný průvodce k tvorbě v systému DrdSim a (v současné době krátký) seznam vestavěných funkcí systému. 1 Vytvoření nového dobrodružství Nejprve
DSL manuál Ing. Jan Hranáč 27. října 2010 V této kapitole je stručný průvodce k tvorbě v systému DrdSim a (v současné době krátký) seznam vestavěných funkcí systému. 1 Vytvoření nového dobrodružství Nejprve
Redakční systém Joomla. Prokop Zelený
 Redakční systém Joomla Prokop Zelený 1 Co jsou to red. systémy? Redakční systémy (anglicky Content Management System - CMS) jsou webové aplikace používané pro snadnou správu obsahu stránek. Hlavním cílem
Redakční systém Joomla Prokop Zelený 1 Co jsou to red. systémy? Redakční systémy (anglicky Content Management System - CMS) jsou webové aplikace používané pro snadnou správu obsahu stránek. Hlavním cílem
Skripta ke školení. Základy VBA. vypracoval: Tomáš Herout. tel:
 Skripta ke školení Základy VBA vypracoval: Tomáš Herout e-mail: herout@helpmark.cz tel: 739 719 548 2016 Obsah TROCHA TEORIE VBA...2 ZPŮSOB ZÁPISU VE VBA...2 CO JE TO FUNKCE...2 CO JE TO PROCEDURA...2
Skripta ke školení Základy VBA vypracoval: Tomáš Herout e-mail: herout@helpmark.cz tel: 739 719 548 2016 Obsah TROCHA TEORIE VBA...2 ZPŮSOB ZÁPISU VE VBA...2 CO JE TO FUNKCE...2 CO JE TO PROCEDURA...2
ROBOTICKÝ POPELÁŘ. Jan Dimitrov, Tomáš Kestřánek. VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1
 Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT ROBOTICKÝ POPELÁŘ Jan Dimitrov, Tomáš Kestřánek VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1 Anotace Cílem
Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT ROBOTICKÝ POPELÁŘ Jan Dimitrov, Tomáš Kestřánek VOŠ a SPŠE Františka Křižíka Na Příkopě 16, Praha 1 Anotace Cílem
Identifikátory označují objekty v programu používané (proměnné, typy, podprogramy).
.") JAZYK PASCAL ÚVOD materiály pro studenty Jiráskova gymnázia v Náchodě (verze 2005-10-28) RNDr Jan Preclík, PhD preclik@gymnachodcz Jazyk Pascal byl navržen profesorem curyšské univerzity Niklausem Wirthem
JAZYK PASCAL ÚVOD materiály pro studenty Jiráskova gymnázia v Náchodě (verze 2005-10-28) RNDr Jan Preclík, PhD preclik@gymnachodcz Jazyk Pascal byl navržen profesorem curyšské univerzity Niklausem Wirthem
UniLog-D. v1.01 návod k obsluze software. Strana 1
 UniLog-D v1.01 návod k obsluze software Strana 1 UniLog-D je PC program, který slouží k přípravě karty pro záznam událostí aplikací přístroje M-BOX, dále pak k prohlížení, vyhodnocení a exportům zaznamenaných
UniLog-D v1.01 návod k obsluze software Strana 1 UniLog-D je PC program, který slouží k přípravě karty pro záznam událostí aplikací přístroje M-BOX, dále pak k prohlížení, vyhodnocení a exportům zaznamenaných
Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_49_IVT_MSOFFICE_05_Word
 Číslo projektu Název školy Název Materiálu Autor Tematický okruh Ročník CZ.1.07/1.5.00/34.0499 Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_49_IVT_MSOFFICE_05_Word Ing. Pavel BOHANES
Číslo projektu Název školy Název Materiálu Autor Tematický okruh Ročník CZ.1.07/1.5.00/34.0499 Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_49_IVT_MSOFFICE_05_Word Ing. Pavel BOHANES
Tvorba krátkého videofilmu
 Tvorba krátkého videofilmu pomocí programu Windows Live Movie Maker (Windows 7) (podobné je to v programu Windows Movie Maker ve starších verzích Windows) Abyste mohli video programem Windows Live Movie
Tvorba krátkého videofilmu pomocí programu Windows Live Movie Maker (Windows 7) (podobné je to v programu Windows Movie Maker ve starších verzích Windows) Abyste mohli video programem Windows Live Movie
Návod k obsluze trenažéru
 Návod k obsluze trenažéru K ovládání trenažéru slouží kompaktní řídící systém, který je vybaven dvouřádkovým displejem a membránovou klávesnicí. Na klávesnici jsou klávesy : ENT + - - STOP nebo návrat
Návod k obsluze trenažéru K ovládání trenažéru slouží kompaktní řídící systém, který je vybaven dvouřádkovým displejem a membránovou klávesnicí. Na klávesnici jsou klávesy : ENT + - - STOP nebo návrat
POVLTAVSKÉ SETKÁNÍ BALTÍKŮ - 9.ročník - 17.10. a 18.10. 2014
 POVLTAVSKÉ SETKÁNÍ BALTÍKŮ - 9.ročník - 17.10. a 18.10. 2014 1. Úloha výcvik samuraje (24 bodů) a. Každý samuraj se musí učit. V této úlozu probíhá jeho výcvik. Na ploše se najednou objeví nápis stejný
POVLTAVSKÉ SETKÁNÍ BALTÍKŮ - 9.ročník - 17.10. a 18.10. 2014 1. Úloha výcvik samuraje (24 bodů) a. Každý samuraj se musí učit. V této úlozu probíhá jeho výcvik. Na ploše se najednou objeví nápis stejný
Psaní programu pro PLC SIMATIC S7-300 pomocí STEP 7
 Psaní programu pro PLC SIMATIC S7-300 pomocí STEP 7 Seznámení s programem STEP 7 bude provedeno řešením jednoduché úlohy. Lis s ochranným zařízením má být spuštěn jen pomocí signálu START- spínače S1,
Psaní programu pro PLC SIMATIC S7-300 pomocí STEP 7 Seznámení s programem STEP 7 bude provedeno řešením jednoduché úlohy. Lis s ochranným zařízením má být spuštěn jen pomocí signálu START- spínače S1,
VISUAL BASIC. Práce se soubory
 VISUAL BASIC Práce se soubory Práce se soubory 1/2 2 Vstupní data pro programy bývají uloženy do souborů Vstupy pro výpočet, nastavení vzhledu aplikace Výsledky práce programu je potřeba uchovat uložit
VISUAL BASIC Práce se soubory Práce se soubory 1/2 2 Vstupní data pro programy bývají uloženy do souborů Vstupy pro výpočet, nastavení vzhledu aplikace Výsledky práce programu je potřeba uchovat uložit
for (i = 0, j = 5; i < 10; i++) { // tělo cyklu }
 { // tělo cyklu }") 5. Operátor čárka, - slouží k jistému určení pořadí vykonání dvou příkazů - oddělím-li čárkou dva příkazy, je jisté, že ten první bude vykonán dříve než příkaz druhý. Např.: i = 5; j = 8; - po překladu
5. Operátor čárka, - slouží k jistému určení pořadí vykonání dvou příkazů - oddělím-li čárkou dva příkazy, je jisté, že ten první bude vykonán dříve než příkaz druhý. Např.: i = 5; j = 8; - po překladu
8.3 Popis dialogových oken
 8.3 Popis dialogových oken Pro přehled jsou na následující ilustraci 8.1 vyobrazena všechna dialogová okna. Jedná se o nemodální dialogy, proto je lze mít otevřené současně. Pouze dále popisovaný dialog
8.3 Popis dialogových oken Pro přehled jsou na následující ilustraci 8.1 vyobrazena všechna dialogová okna. Jedná se o nemodální dialogy, proto je lze mít otevřené současně. Pouze dále popisovaný dialog
Assembler - 5.část. poslední změna této stránky: Zpět
 1 z 5 19.2.2007 7:52 Assembler - 5.část poslední změna této stránky: 9.2.2007 1. Pseudoinstrukce a direktivy Zpět Kromě instrukcí můžete v Assembleru psát také další konstrukce, které se obšem nepřekládají
1 z 5 19.2.2007 7:52 Assembler - 5.část poslední změna této stránky: 9.2.2007 1. Pseudoinstrukce a direktivy Zpět Kromě instrukcí můžete v Assembleru psát také další konstrukce, které se obšem nepřekládají
Školní kolo soutěže Baltík 2011, kategorie C
 Pokyny: 1. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který dostane váš tým přidělený (např. A05, B10, C03 apod.). Řešení uložená v
Pokyny: 1. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který dostane váš tým přidělený (např. A05, B10, C03 apod.). Řešení uložená v
Jednoduché stříhání videa
 Pátek 23. listopadu Jednoduché stříhání videa Máte-li v projektu vložený alespoň jeden videozáznam, objeví se pod náhledem ovládací tlačítka pro spuštění (respektive zastavení) přehrávání a posun vpřed
Pátek 23. listopadu Jednoduché stříhání videa Máte-li v projektu vložený alespoň jeden videozáznam, objeví se pod náhledem ovládací tlačítka pro spuštění (respektive zastavení) přehrávání a posun vpřed
Mezinárodní kolo soutěže Baltík 2007, kategorie A a B
 Pokyny: 1. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který dostal váš tým přidělený (např. A05, B23 apod.). Řešení, uložená v jiné
Pokyny: 1. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který dostal váš tým přidělený (např. A05, B23 apod.). Řešení, uložená v jiné