ROBOTIKA 4. Vlastnosti robotů a manipulátorů Strojové rozpoznávání objektů M3A 2017/2018
|
|
|
- Emil Beran
- před 6 lety
- Počet zobrazení:
Transkript

1 ROBOTIKA 4. Vlastnosti robotů a manipulátorů Strojové rozpoznávání objektů hodina M3A 2017/2018 ING. VLADIMÍR VYHŇÁK
2 Tématické celky Historie robotiky 1. až 5. hodina - historie, vývoj a trendy v oblasti robotiky 2. Základní pojmy z oblasti průmyslových robotů a manipulátorů 6. až 23. hodina - pojem robot a manipulátor - blokové schéma obecného robotu - blokové schéma průmyslového robotu a manipulátoru - popis jednotlivých částí - spolehlivost robotů a manipulátorů 3. Členění manipulačních zařízení 24. až 32. hodina - členění manipulátorů a robotů dle prováděné práce - generace robotů - jednoúčelové manipulátory, programovatelné manipulátory - průmyslové roboty - generace - inteligentní roboty
3 5. Základní typy robotů robot v provedení TTT robot v provedení RTT robot v provedení RRT robot v provedení RRR 6. Vlastnosti robotů a manipulátorů hlediska posuzování robotů a manipulátorů manipulační schopnost počet stupňů volnosti manipulační hmotnost břemene přesnost manipulace 7. Konstrukce robotů pojezdové ústrojí řešení přímočarých pohybů řešení rotačních pohybů řešení kývavých pohybů

4 Robot a umělá intelicence Strojové ROZPOZNÁVÁNÍ
5 Co je rozpoznávání / strojové učení? Epistemologie, česky též gnozeologie, je část filozofie zabývající se původem, podstatou, metodami a možnostmi poznání/znalosti. Rozpoznávání je jednou z metod. Rozpoznávání / strojové učení (jsou téměř synonyma) je vědecká disciplína vytvářející a studující algoritmy, které se učí vytvářením statistických modelů z dat a používají se pro rozhodování a předvídání. Rozpoznávání přiřazuje skutečný objekt nebo událost do jedné nebo více předem stanovených tříd Vzor je objekt, proces nebo událost, které lze pojmenovat. Třída vzorů (nebo kategorie) je množina M X vzorů, jejíž prvky sdílejí podobné rysy, tj. konečné rozpoznatelné vlastnosti (popsané příznaky). Klasifikace (nebo rozpoznávání) přiřazuje daný objekt do předem daných tříd. Klasifikátor je stroj (program), který klasifikaci realizuje.

6 Třída vzorů, příklady Třída syntakticky správných aritmetických výrazů, např.2x(a+ 3b)-6y+ (x-y)/7 M je podmnožinou množiny X všech konečných řetězů nad nějakou abecedou. M lze popsat bezkontextovou gramatikou. Třída binárních obrazů obsahující nepřekrývající a sebe se nedotýkající obdélníkové rámečky s jednopixelovou tloušťkou. M je podmnožinou množiny X všech pravoúhlých binárních obrazů.

7 Třída vzorů, příklady
8 Základní pojmy, ilustrace
9 Rozpoznávání, motivační příklad

10 Celkový pohled, části
11 Dávná vědecká úloha, gnozeologie
12 Klasifikace/kategorizace (nebo popis podle toho, k čemu objekt slouží)
13 Typy možných rozhodnutí / predikčních úloh
14 Další obory sdílející podobné hlavní myšlenky
15 Bilogická motivace
16 Složité jevy a systémové myšlení
17 Pojmy z teorie systémů
18 Generativní a diskriminativní reprezentace objektu
19 Matematické modelování
20 Alternativou k modelování je rozpoznávání
21
22
23 Cíle umělé inteligence Sestrojit stroje (programy), které: se chovají jako lidé přemýšlí jako lidé se chovají racionálně přemýšlí racionálně
24 Umělá inteligence? Filosofická definice Technická definice
25 Umělá inteligence? Filosofická definice: věda, která zkoumá zákonitosti lidského uvažovaní tím, že se ho snaží modelovat pomocí počítačových programů Technická definice
26 Umělá inteligence? Filosofická definice: Technická definice: vědecká disciplína, která navrhuje tzv. inteligentní systémy, které řeší komplexní problémy
27 Umělá inteligence? Filosofická definice: věda, která zkoumá zákonitosti lidského uvažovaní tim, že se snaží ji modelovat pomocí počítačových programů Technická definice
28 Síla umělé inteligence? Silná Slabá

29 Síla umělé inteligence? Silná: výpočetní model veškerých projevů lidského uvažování a mentálních stavů člověka Slabá
30 Síla umělé inteligence? Silná Slabá: schopnost naprogramovat takový stroj, jehož jednání bude navenek od člověka nerozpoznatelné
31 Síla umělé inteligence? Silná Slabá: schopnost naprogramovat takový stroj, jehož jednání bude navenek od člověka nerozpoznatelné Turingův test:

32 Síla umělé inteligence? Silná Slabá: schopnost naprogramovat takový stroj, jehož jednání bude navenek od člověka nerozpoznatelné Turingův test: existuje?

33 Síla umělé inteligence? Silná Slabá: schopnost naprogramovat takový stroj, jehož jednání bude navenek od člověka nerozpoznatelné Turingův test: existuje

34 Symbolická umělá inteligence Naprogramovat inteligentní systém s co možná nejpřesnějším modelem lidského uvažování a lidských znalostí
35 Umělá inteligence? Filosofická definice: Technická definice: technická disciplína, která navrhuje tzv. inteligentní systémy, které řeší racionálně komplexní problémy

36 Umělá inteligence? Filosofická definice: Technická definice: technická disciplína, která navrhuje tzv. inteligentní systémy, které řeší racionálně komplexní problémy výpočetní mechanismy takovýchto inteligentních systémů jsou založeny na metodách UI
37 Problémy umělé inteligence Rozpoznávání přirozené řeči Automatické vytváření důkazů Hraní dvou a vícehráčových her Rozpoznávání obrazu Strojové učení a adaptace Plánování a rozvrhování složitých procesů

38 Známé přístupy k umělé inteligenci Neuronové sítě

39 Známé přístupy k umělé inteligenci Prohledávání stavového prostoru

40 Známé přístupy k umělé inteligenci Multi-agentní systémy
41

42 Aplikace počítačového vidění
43 Definice počítačového vidění Systémy počítačového vidění systémy strojového vnímání systémy pro zpracování obrazu kamerové systémy vizuální systémy Disciplína, která se snaží technickými prostředky alespoň částečně napodobit lidské vidění kvalitu lidského senzoru (oka) a kvalitu analýzy obrazu (inteligence, znalosti, zkušenosti) Obor, který pomocí technických prostředků usiluje o získání smysluplného popisu objektů vyskytujících se v obraze
44 Příbuzné obory Umělá inteligence Teorie řízení Zpracování signálů Biologie, neurofyziologie Matematika statistika, geometrie Fyzika optika
45 Proč je vidění těžké? Ztráta informace díky perspektivní projekci, 3D => 2D Měřená jednotka = nejčastěji jas Jas bodu závisí na: poloze kamery poloze a typu světelného zdroje odrazivosti povrchu, barvě orientaci (natočení) povrchu Množství dat Příklad: statický obraz 512 x 512 bodů, 1 bod = 1B (256 jas. úrovní) => 256kB stejný barevný obraz, 1 bod = 3B => 768kB stejný barevný obraz při 25 snímcích za sekundu (TV signál) => 18,75MB/s Nejistota přítomnost šumu, zkreslení
46 Výhody Přesnost Spolehlivost, měření s konstantními parametry, neunavitelnost, nezkorumpovatelnost Rychlost Paralelně může probíhat více kontrolních úloh, třeba měření rozměrů a zároveň kontrola barvy Umožňují kontrolu prakticky jakéhokoliv parametru, který má optickou vazbu na vzhled nebo charakter snímané scény Měření je bezkontaktní, nedestruktivní Velké množství informací v podobě, která je pro člověka nejlépe srozumitelná - vizuální cestou člověk přijímá téměř 90 % informací Nastavení systému je rychlé a nevyžaduje složité mechanické konstrukce Možnost změnou konfigurace softwaru prakticky okamžitě přepínat mezi podobnými typy měření není nutné složitě a nákladně měnit hardwarovou konfiguraci Cena - vyšší počáteční náklady jsou kompenzovány nižšími náklady provozními a úsporami času i materiálu ve výrobě
47 Metodika vývoje zakázky Myšlenka aplikace kamerového systému (ze strany zákazníka) Kontaktování firmy zabývající se počítačovým viděním nebo systémového integrátora Hrubé posouzení realizovatelnosti projektu nejlépe návštěva provozu, pochopení problému, posouzení vhodnosti nasazení počítačového vidění, hrubý návrh metody měření odborníkem Podrobná analýza problému návrh řešení celého systému nejlépe v podobě podrobné studie diskuze s pracovníky (managery, technickými pracovníky, kontrolory kvality, výrobáři, ) - definice požadavků zákazníka experimenty s reálnými vzorky (např. výrobků s vadami i bez vad) - návrh a zhodnocení různých metod měření, odhad přesnosti měření, rychlosti, odhad potřebného HW a nutných úprav stávajícího zařízení, odhad náročnosti vývoje odhad ceny a časové náročnosti Řešení projektu výběr vhodného HW, návrh konkrétní mechaniky, výroba, instalace zařízení pořízení testovacích snímků, vývoj algoritmů vývoj a specifikace uživatelského rozhraní testy funkčnosti a spolehlivosti Zkušební provoz doladění detailů, vyhodnocení kvality měření (statistiky) Reálný provoz sledování stavu zařízení a kvality měření, servis
48 Volba způsobu měření rozměry zkoumaného předmětu a jeho vzdálenost požadovaná přesnost měření vlastnosti povrchu předmětu (nerovnost, drsnost, odrazivost světla) vlastnosti okolních zdrojů světla (intenzita, spektrum, koherence) možná doba měření X odhadovaná časová náročnost snímání a zpracování přístupnost k měřenému objektu a maximální možné rozměry měřicího systému (aby jej bylo možné například umístit na již fungující linku) způsob vystavení měřeného objektu do vhodné měřící pozice mechanické díly, polohování, dopravníky, - odhad potřebného HW a nutných úprav stávajícího zařízení možnost kalibrace systému možnost konfigurace systému i pro jiné, podobné výrobky přesná definice požadavků na systém a definice výstupů měření náročnost výzkumu a vývoje cena
49 Řetězec zpracování obrazu
50 Možné aplikace použití počítačového vidění Úlohy měření v rovině přesná měření rozměrů, polohy, orientace Detekce přítomnosti a kompletnosti výrobků, počítání objektů v obraze Střežení objektů Klasifikace - podle tvaru (obrysu), barvy, povrchových vlastností atd. Defektoskopie, inspekční systémy detekce povrchových vad výrobků, inspekce transparentních materiálů atd. OCR SPZ, čtení kódů, převod tištěné knihy do elektronické Měření 3D rozměrů, měření objemu, 3D digitální modely Navigace v prostoru, polohování robotů Pohyb detekce pohybu, detekce pohybujícího se objektu, sledování trajektorie Dopravní úlohy měření rychlosti, detekce vozidel projíždějících na červenou, detekce krizových stavů Analýza lékařských obrazů, měření biometrických údajů Bezkontaktní měření teploty (termokamery) Měření deformací (interferometrie) Analýza snímků hvězdné oblohy, analýza leteckých snímků Počítačové vidění ve spojení s počítačovou grafikou = virtualizovaná realita
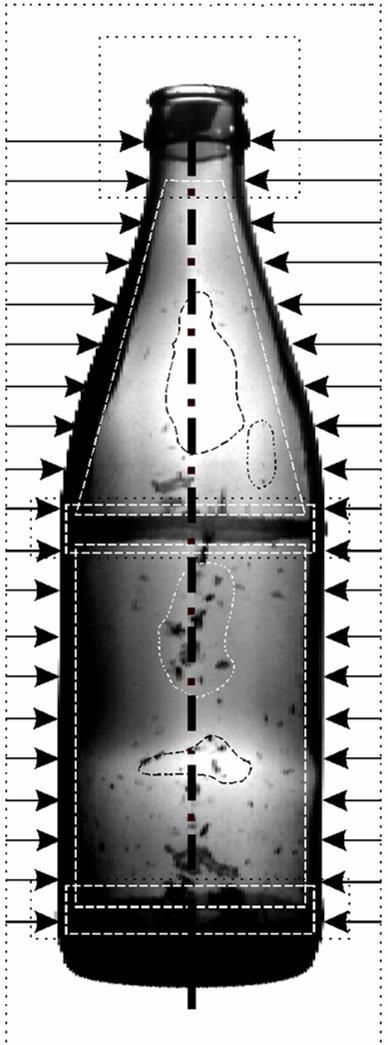
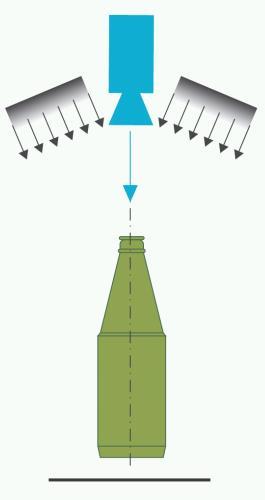

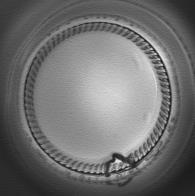

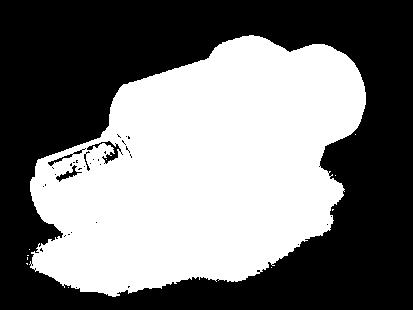
51 Inspekce transparentních materiálů (pivních lahví) dno láhve hrdlo láhve zbytky etiket cizí objekty špína plíseň škrábance stěna láhve



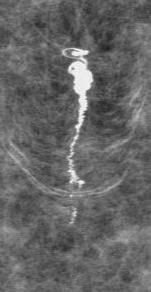
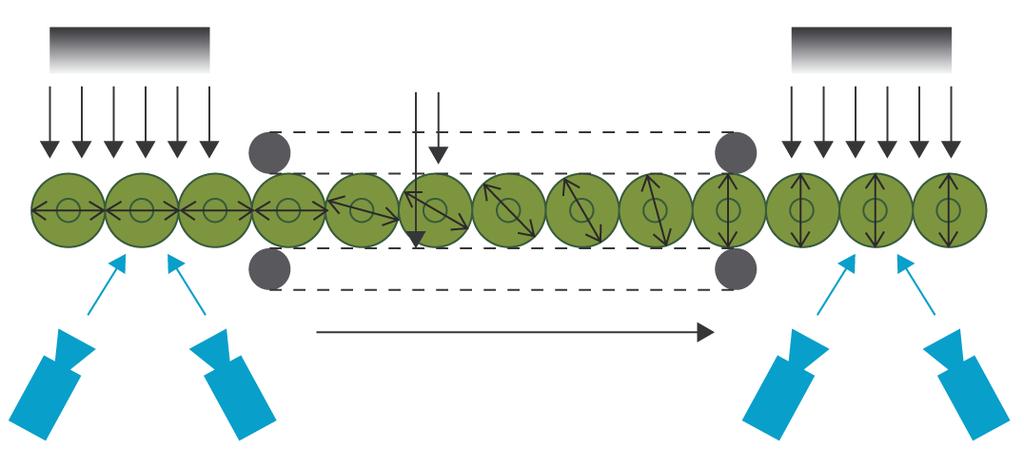
52 Inspekce netkaných textilií díry výkapky hmyz







53 Inspekce SMD součástek špína, cizí předměty kvalita sváření, rozměry, pozice, struktura potisk kontrola, polarita, poškození kontakty rozměry, úhel natočení, ohyb, kvalita spoje detekce prasklin




54 Počítání objektů ve scéně - automatického počítání různě orientovaných náhodně rozmístěných skleněných broušených kamenů - návrh způsobu osvětlení, návrh software



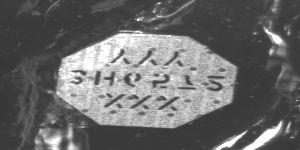





55 Čtecí zařízení mikroteček - analýza optických vlastností mikroteček - návrh HW řešení čtečky - algoritmy pro lokalizaci mikrotečky ve snímku - algoritmy pro čtení znaků mikroteček


56 Kamerový systém do komory ionizujícího záření - sledování prováděných operací v komoře - záření nebezpečné jednak pro člověka, jednak pro elektroniku a optiku - návrh počtu a umístění kamer - návrh geometrického uspořádání optické soustavy zrcadel periskopu

")

57 Rychloběžná kamera - lokalizace pozice infračerveného laserového paprsku mířidla zbraně na projekční ploše - vyhodnocení správnosti míření vojáků při interaktivním tréninku při simulaci bojové scény - časový multiplex s 10 kanály (paralelně lze vyhodnocovat až 10 mířidel) - parametry kamery: 330 fps / 1280x1024 / 10 bit - paralelní vyhodnocení obrazu v FPGA (výstupem je poloha laserového svazku na plátně) zaměřovací IR laser





58 3D měření Detekce a klasifikace vozidel Kontrola kvality svarů automobilových disků Měření objemu kapky viskózního lepidla Pořízení 3D modelu kopyta klobouku

59 Metro počítání osob - počítání osob vstupujících a vystupujících z technických prostor metra - zlepšení kontrastu sledovaných objektů volbou pozadí


60 Dopravní úlohy detekce průjezdu na červenou - Lokalizace SPZ - OCR



61 Dopravní úlohy měření průměrné rychlosti v úseku


62 Dopravní úlohy laserový měřič rychlosti vozidel - algoritmy vyhodnocení dat - testy kvality vyhodnocení vzhledem k rozdílným vstupním podmínkám


63 Dopravní úlohy - detekce kritických stavů (nehoda, zácpa) - mobilní detekce kradená vozidla


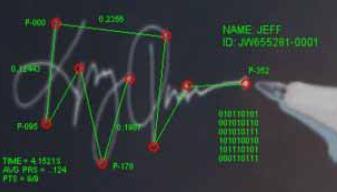


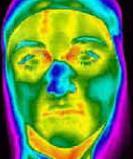
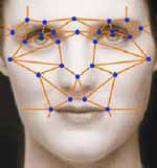
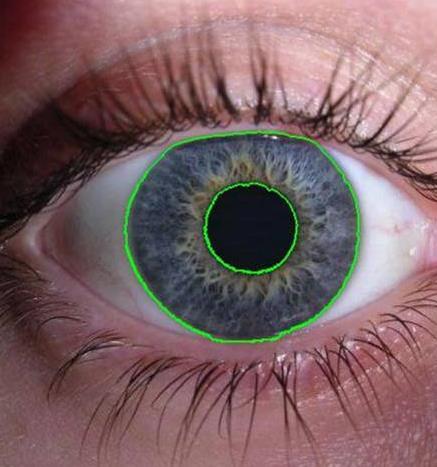
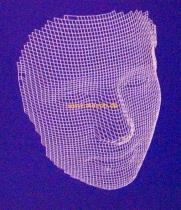
64 Měření biometrických údajů Geometrie ruky Otisk prstu Duhovka oka Dentální obraz Sítnice oka Dynamické vlastnosti např. - chůze - podpis - gestikulace Podpis Obličej Termogram obličeje Tvar obličeje Tvar ucha




")
65 Lékařské aplikace -určování polohy chirurgických nástrojů z 3D ultrazvukového přístroje -3D měření dýchacích pohybů -geometrické srovnání odpovídajících si obrazů - z jiných přístrojů - před a po operaci (léčbě) -diagnostika ultrazvukových obrazů



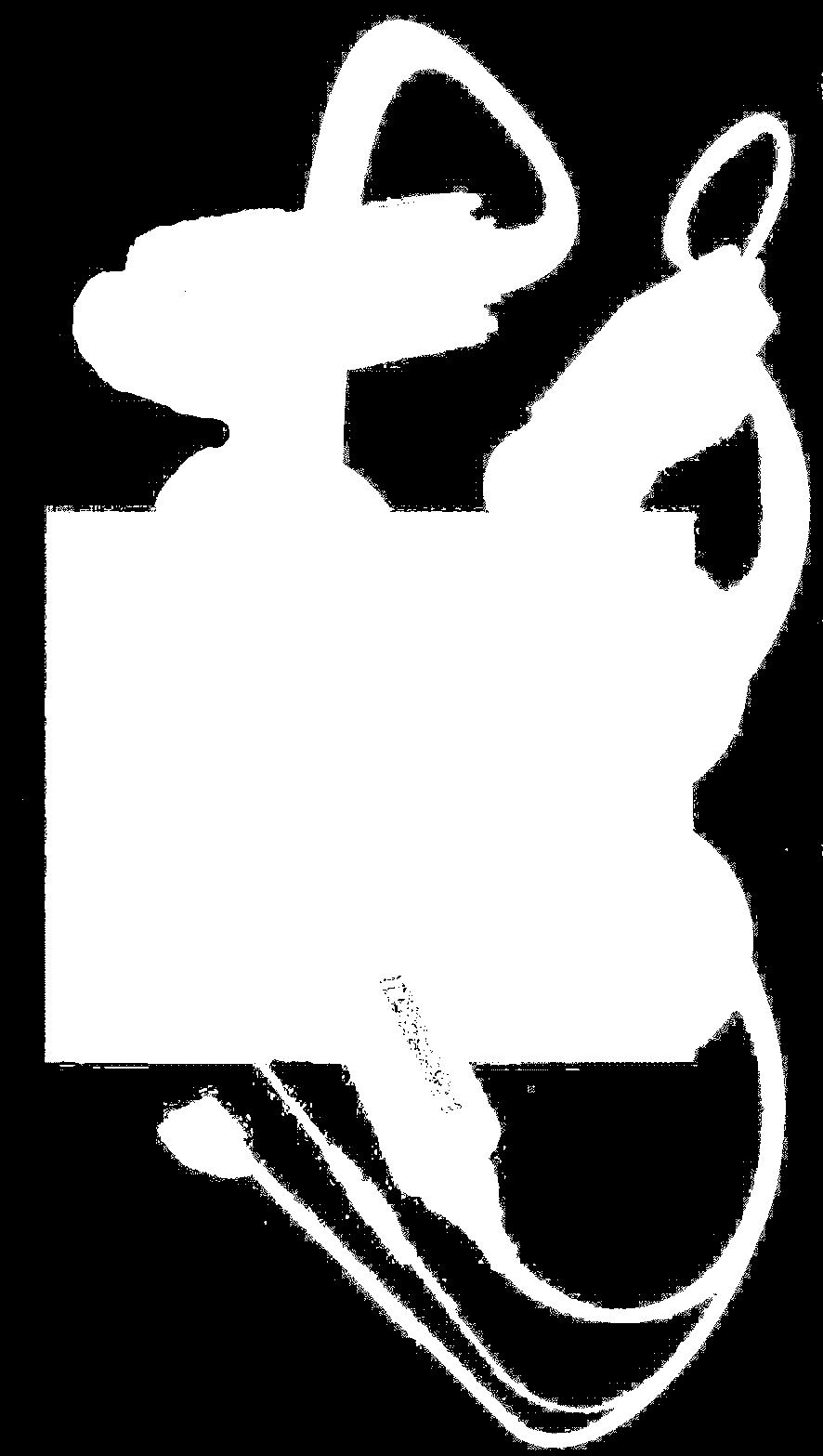
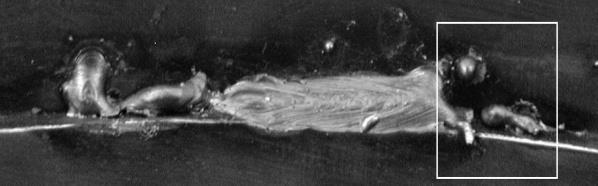
66 Sledování pohybu -trasování pohybu člověka -sledování trajektorie pohybu plavající krysy -navádění robotů





67 Studování vesmíru Analýza snímků hvězdné oblohy objevování nových hvězd, galaxií, Tvář na Marsu Zkoumání okolních planet, vesmírné výpravy Specializovaný SW volně dostupný Sledování procesů ve vesmíru - vzplanutí mladé hvězdy (RTG snímek)






68 Letecké snímky, satelitní snímky Aktualizace map Vojenské, špionážní průzkumy Sledování počasí, předpovědi Klasifikace urbanizovaného území radarový snímek
Aplikace počítačového vidění
 1 / 39 Aplikace počítačového vidění Ilona Janáková Rozvrh přednášky: 1. Úvod. 2. Metodika vývoje zakázky. 3. Aplikace. 2 / 39 Aplikace počítačového vidění Ilona Janáková Rozvrh přednášky: 1. Úvod. 2. Metodika
1 / 39 Aplikace počítačového vidění Ilona Janáková Rozvrh přednášky: 1. Úvod. 2. Metodika vývoje zakázky. 3. Aplikace. 2 / 39 Aplikace počítačového vidění Ilona Janáková Rozvrh přednášky: 1. Úvod. 2. Metodika
Úvod do zpracování obrazů. Petr Petyovský Miloslav Richter
 Úvod do zpracování obrazů Petr Petyovský Miloslav Richter 1 OBSAH Motivace, prvky a základní problémy počítačového vidění, pojem scéna Terminologie, obraz, zpracování a analýza obrazu, počítačové vidění,
Úvod do zpracování obrazů Petr Petyovský Miloslav Richter 1 OBSAH Motivace, prvky a základní problémy počítačového vidění, pojem scéna Terminologie, obraz, zpracování a analýza obrazu, počítačové vidění,
Pokročilé operace s obrazem
 Získávání a analýza obrazové informace Pokročilé operace s obrazem Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 (BFÚ LF MU) Získávání
Získávání a analýza obrazové informace Pokročilé operace s obrazem Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 (BFÚ LF MU) Získávání
Defektoskopie. 1 Teoretický úvod. Cíl cvičení: Detekce měřicího stavu a lokalizace objektu
 Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
Defektoskopie a defektometrie
 Defektoskopie a defektometrie Aplikace počítačového vidění Karel Horák Skupina počítačového ového vidění Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií Vysoké
Defektoskopie a defektometrie Aplikace počítačového vidění Karel Horák Skupina počítačového ového vidění Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií Vysoké
Automatizační a měřicí technika (B-AMT)
") Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
Ústav automatizace a měřicí techniky.
 www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2014 7.4 13/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 7.4 13/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 13 0:40 Implementace Umělá inteligence (UI) Umělá inteligence
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 7.4 13/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 13 0:40 Implementace Umělá inteligence (UI) Umělá inteligence
Aplikace bin picking s použitím senzorové fúze
 Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
1 Úvod 1.1 Vlastnosti programového vybavení (SW)
") 1 Úvod 1.1 Vlastnosti programového vybavení (SW) - dávkové zpracování - omezená distribuce - zakázkový SW - distribuované systémy - vestavěná inteligence - laciný HW - vliv zákazníka 1950 1960 1970 1980
1 Úvod 1.1 Vlastnosti programového vybavení (SW) - dávkové zpracování - omezená distribuce - zakázkový SW - distribuované systémy - vestavěná inteligence - laciný HW - vliv zákazníka 1950 1960 1970 1980
WP6 - Komponenty robotického systému interakce člověk-stroj
 Centrum aplikované kybernetiky 3 WP6 - Komponenty robotického systému interakce člověk-stroj zodpovídá: Libor Přeučil Skupina inteligentní mobilní robotiky Katedra kybernetiky FEL, ČVUT v Praze Certicon
Centrum aplikované kybernetiky 3 WP6 - Komponenty robotického systému interakce člověk-stroj zodpovídá: Libor Přeučil Skupina inteligentní mobilní robotiky Katedra kybernetiky FEL, ČVUT v Praze Certicon
SYSTÉMOVÁ METODOLOGIE (VII) Kybernetika. Ak. rok 2011/2012 vbp 1
 Kybernetika. Ak. rok 2011/2012 vbp 1") SYSTÉMOVÁ METODOLOGIE (VII) Kybernetika Ak. rok 2011/2012 vbp 1 ZÁKLADNÍ SMĚRY A DISCIPLÍNY Teoretická kybernetika (vědecký aparát a metody ke zkoumání kybernetických systémů; používá abstraktní modely
SYSTÉMOVÁ METODOLOGIE (VII) Kybernetika Ak. rok 2011/2012 vbp 1 ZÁKLADNÍ SMĚRY A DISCIPLÍNY Teoretická kybernetika (vědecký aparát a metody ke zkoumání kybernetických systémů; používá abstraktní modely
CAMEA. UnirailOCR Train Recognition System
 CAMEA Technologie pro rozpoznávání čísel jedoucích vagónů a kontejnerů (UIC)» Záštita projektu evropským programem aplikovaného výzkumu a vývoje EUREKA» LF12007 - Automatická identifikace železničních
CAMEA Technologie pro rozpoznávání čísel jedoucích vagónů a kontejnerů (UIC)» Záštita projektu evropským programem aplikovaného výzkumu a vývoje EUREKA» LF12007 - Automatická identifikace železničních
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
Moderní metody rozpoznávání a zpracování obrazových informací 15
 Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
Ústav technologie, mechanizace a řízení staveb. Teorie měření a regulace. strojové vidění. p. 3q. ZS 2015/2016. 2015 - Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace strojové vidění p. 3q. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. foto-snímače Obrazová analýza je proces, který lidstvo využívalo
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace strojové vidění p. 3q. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. foto-snímače Obrazová analýza je proces, který lidstvo využívalo
Bezpečnostní systémy - rychlostní kamery Identifikace SPZ a RZ. www.mestozlin.cz
 Bezpečnostní systémy - rychlostní kamery Identifikace SPZ a RZ Město Zlín Jednou z možností monitorování a řízení dopravy v obcích je automatické snímání silničního provozu Monitorování dopravy vozidel
Bezpečnostní systémy - rychlostní kamery Identifikace SPZ a RZ Město Zlín Jednou z možností monitorování a řízení dopravy v obcích je automatické snímání silničního provozu Monitorování dopravy vozidel
Informace pro výběr bakalářského oboru
 Informace pro výběr bakalářského oboru 2017.03.15 J. Matas Bakalářské obory informatika a počítačové vědy software internet věcí počítačové hry a grafika kapacita všech oborů je dostatečná pro volný výběr
Informace pro výběr bakalářského oboru 2017.03.15 J. Matas Bakalářské obory informatika a počítačové vědy software internet věcí počítačové hry a grafika kapacita všech oborů je dostatečná pro volný výběr
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k vkládání částečné "chytrosti" nebo "inteligence" do technických řízení Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k vkládání částečné "chytrosti" nebo "inteligence" do technických řízení Autor: Doc. Ing. Josef Formánek, Ph.D.
Optika v počítačovém vidění MPOV
 Optika v počítačovém vidění MPOV Rozvrh přednášky: 1. A/D převod 2. zpracování obrazu 3. rozhraní kamer 4. další související zařízení 5. motivace - aplikace Princip pořízení a zpracování obrazu Shoda mezi
Optika v počítačovém vidění MPOV Rozvrh přednášky: 1. A/D převod 2. zpracování obrazu 3. rozhraní kamer 4. další související zařízení 5. motivace - aplikace Princip pořízení a zpracování obrazu Shoda mezi
Automatické rozpoznávání dopravních značek
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
KITTV PedF UK TÉMATA BAKALÁŘSKÝCH PRACÍ pro školní rok 2010/2011
 KITTV PedF UK TÉMATA BAKALÁŘSKÝCH PRACÍ pro školní rok 2010/2011 PRO STUDENTY OBORU Informační a komunikační technologie se zaměřením na vzdělávání Algoritmizace a programování v Imagine Tvorba a ověření
KITTV PedF UK TÉMATA BAKALÁŘSKÝCH PRACÍ pro školní rok 2010/2011 PRO STUDENTY OBORU Informační a komunikační technologie se zaměřením na vzdělávání Algoritmizace a programování v Imagine Tvorba a ověření
Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách
 zákona č. 137/2006 Sb., o veřejných zakázkách") Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
DOM - ZO 13, s.r.o., školící středisko NDT. TD401-F701 Osnova kurzů NDT
 Strana: 1/6 Obsah Seznam normativních dokumentů pro školení pracovníků NDT...2 Vizuální kontrola svařované výrobky...3 Osnova kurzu pro VT stupeň 1...3 Osnova kurzu pro VT stupeň 2...5 Nejbližší termín
Strana: 1/6 Obsah Seznam normativních dokumentů pro školení pracovníků NDT...2 Vizuální kontrola svařované výrobky...3 Osnova kurzu pro VT stupeň 1...3 Osnova kurzu pro VT stupeň 2...5 Nejbližší termín
RFID laboratoř Ing. Jan Gottfried, Ph.D.
 RFID laboratoř Ing. Jan Gottfried, Ph.D. VIZE Být špičkovým pracovištěm s odbornými kompetencemi a znalostmi v oblasti technologií automatické identifikace RFID, standardů GS1 EPCglobal a Internetu věcí.
RFID laboratoř Ing. Jan Gottfried, Ph.D. VIZE Být špičkovým pracovištěm s odbornými kompetencemi a znalostmi v oblasti technologií automatické identifikace RFID, standardů GS1 EPCglobal a Internetu věcí.
Kontrola skleněných výrobků
 Kontrola skleněných výrobků a související hardware www.visionx.cz Tomáš Gřeš, Zdeněk Šebestík ATEsystem s.r.o. Služby pro průmysl Kamerové systémy pro kontrolu kvality Algoritmy pro zpracování obrazu Subdodávky
Kontrola skleněných výrobků a související hardware www.visionx.cz Tomáš Gřeš, Zdeněk Šebestík ATEsystem s.r.o. Služby pro průmysl Kamerové systémy pro kontrolu kvality Algoritmy pro zpracování obrazu Subdodávky
8. PŘÍSTUPOVÉ SYSTÉMY
 Přístupový systém: Přístupové systémy 8. PŘÍSTUPOVÉ SYSTÉMY Systém řízení přístupu umožní osobě na základě prokázání oprávněnosti vstup nebo vjezd do objektu, případně do střežené části objektu. V literatuře
Přístupový systém: Přístupové systémy 8. PŘÍSTUPOVÉ SYSTÉMY Systém řízení přístupu umožní osobě na základě prokázání oprávněnosti vstup nebo vjezd do objektu, případně do střežené části objektu. V literatuře
Software Dynamická geometrie v optice. Andreas Ulovec Andreas.Ulovec@univie.ac.at
 PROMOTE MSc POPIS TÉMATU FYZIKA 4 Název Tematický celek Jméno a e-mailová adresa autora Cíle Obsah Pomůcky Software Dynamická geometrie v optice Optika Andreas Ulovec Andreas.Ulovec@univie.ac.at Užití
PROMOTE MSc POPIS TÉMATU FYZIKA 4 Název Tematický celek Jméno a e-mailová adresa autora Cíle Obsah Pomůcky Software Dynamická geometrie v optice Optika Andreas Ulovec Andreas.Ulovec@univie.ac.at Užití
Základy umělé inteligence
 Základy umělé inteligence Úvod Základy umělé inteligence - úvod. Vlasta Radová, ZČU, katedra kybernetiky 1 Zavedení pojmu umělá inteligence Inteligence je schopnost získávat a aplikovat vědomosti a tedy
Základy umělé inteligence Úvod Základy umělé inteligence - úvod. Vlasta Radová, ZČU, katedra kybernetiky 1 Zavedení pojmu umělá inteligence Inteligence je schopnost získávat a aplikovat vědomosti a tedy
Povolání Vyšší odborné vzdělání; Bakalářský studijní program
 Programátor PLC Programátor PLC konfiguruje PLC hardware a programuje základní chování hardware řídicího systému k zajištění požadované automatizace výrobních nebo regulačních činností. Zajišťuje automatizaci
Programátor PLC Programátor PLC konfiguruje PLC hardware a programuje základní chování hardware řídicího systému k zajištění požadované automatizace výrobních nebo regulačních činností. Zajišťuje automatizaci
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2014 8 14/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
Aplikace barevného vidění ve studiu elastohydrodynamického mazání
 Ústav fyzikálního inženýrství Fakulta strojního inženýrství Vysoké učení technické v Brně Aplikace barevného vidění ve studiu elastohydrodynamického mazání Ing. Radek Poliščuk 1/16 Cíle disertační práce
Ústav fyzikálního inženýrství Fakulta strojního inženýrství Vysoké učení technické v Brně Aplikace barevného vidění ve studiu elastohydrodynamického mazání Ing. Radek Poliščuk 1/16 Cíle disertační práce
Učící se klasifikátory obrazu v průmyslu
 Učící se klasifikátory obrazu v průmyslu FCC průmyslové systémy s.r.o. FCC průmyslové systémy je technicko obchodní společností, působící v oblasti průmyslové automatizace. Tvoří ji dvě základní divize:
Učící se klasifikátory obrazu v průmyslu FCC průmyslové systémy s.r.o. FCC průmyslové systémy je technicko obchodní společností, působící v oblasti průmyslové automatizace. Tvoří ji dvě základní divize:
Zpracování obrazu v FPGA. Leoš Maršálek ATEsystem s.r.o.
 Zpracování obrazu v FPGA Leoš Maršálek ATEsystem s.r.o. Základní pojmy PROCESOROVÉ ČIPY Křemíkový čip zpracovávající obecné instrukce Různé architektury, pracují s různými paměti Výkon instrukcí je závislý
Zpracování obrazu v FPGA Leoš Maršálek ATEsystem s.r.o. Základní pojmy PROCESOROVÉ ČIPY Křemíkový čip zpracovávající obecné instrukce Různé architektury, pracují s různými paměti Výkon instrukcí je závislý
Technická diagnostika, chyby měření
 Technická diagnostika, chyby měření Obsah přednášky Technická diagnostika Měřicí řetězec Typy chyb měření Příklad diagnostiky: termovize ložisko 95 C měření 2/21 Co to je? Technická diagnostika Obdoba
Technická diagnostika, chyby měření Obsah přednášky Technická diagnostika Měřicí řetězec Typy chyb měření Příklad diagnostiky: termovize ložisko 95 C měření 2/21 Co to je? Technická diagnostika Obdoba
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
UITS / ISY. Ústav inteligentních systémů Fakulta informačních technologií VUT v Brně. ISY: Výzkumná skupina inteligentních systémů 1 / 14
 UITS / ISY Výzkumná skupina inteligentních systémů Ústav inteligentních systémů Fakulta informačních technologií VUT v Brně ISY: Výzkumná skupina inteligentních systémů 1 / 14 Obsah Představení skupiny
UITS / ISY Výzkumná skupina inteligentních systémů Ústav inteligentních systémů Fakulta informačních technologií VUT v Brně ISY: Výzkumná skupina inteligentních systémů 1 / 14 Obsah Představení skupiny
Časové a organizační vymezení
 Vzdělávací oblast Vzdělávací obor Vyučovací předmět Týdenní hodinové dotace Časové a organizační vymezení Matematika a její aplikace Matematika a její aplikace Matematika 1. stupeň 2. stupeň 1. ročník
Vzdělávací oblast Vzdělávací obor Vyučovací předmět Týdenní hodinové dotace Časové a organizační vymezení Matematika a její aplikace Matematika a její aplikace Matematika 1. stupeň 2. stupeň 1. ročník
Algoritmy a struktury neuropočítačů ASN - P10. Aplikace UNS v biomedicíně
 Aplikace UNS v biomedicíně aplikace v medicíně postup při zpracování úloh Aplikace UNS v medicíně Důvod: nalezení exaktnějších, levnějších a snadnějších metod určování diagnóz pro lékaře nalezení šetrnějších
Aplikace UNS v biomedicíně aplikace v medicíně postup při zpracování úloh Aplikace UNS v medicíně Důvod: nalezení exaktnějších, levnějších a snadnějších metod určování diagnóz pro lékaře nalezení šetrnějších
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Počítače a grafika. Ing. Radek Poliščuk, Ph.D. Přednáška č.7. z předmětu
 Ústav automatizace a informatiky Fakulta strojního inženýrství Vysoké učení technické v Brně Přednáška č.7. z předmětu Počítače a grafika Ing. Radek Poliščuk, Ph.D. 1/14 Obsahy přednášek Přednáška 7 Zpracování
Ústav automatizace a informatiky Fakulta strojního inženýrství Vysoké učení technické v Brně Přednáška č.7. z předmětu Počítače a grafika Ing. Radek Poliščuk, Ph.D. 1/14 Obsahy přednášek Přednáška 7 Zpracování
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/ Množiny, funkce
 Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Digitální zpracování obrazu počítačové vidění zakotvení
 Digitální zpracování obrazu počítačové vidění zakotvení Václav Hlaváč České vysoké učení technické v Praze Fakulta elektrotechnická, katedra kybernetiky Centrum strojového vnímání http://cmp.felk.cvut.cz/
Digitální zpracování obrazu počítačové vidění zakotvení Václav Hlaváč České vysoké učení technické v Praze Fakulta elektrotechnická, katedra kybernetiky Centrum strojového vnímání http://cmp.felk.cvut.cz/
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
Katalogový list ESD digitální systém pro kontrolu BGA, Basic OP Obj. číslo: Popis
 Katalogový list www.abetec.cz ESD digitální systém pro kontrolu BGA, Basic OP019 185 Obj. číslo: 106000856 Výrobce: Optilia Popis Optický inspekční systém pro kontrolu BGA. HD kamera s vysokým rozlišením.
Katalogový list www.abetec.cz ESD digitální systém pro kontrolu BGA, Basic OP019 185 Obj. číslo: 106000856 Výrobce: Optilia Popis Optický inspekční systém pro kontrolu BGA. HD kamera s vysokým rozlišením.
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ
 VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
Programování LEGO MINDSTORMS s použitím nástroje MATLAB a Simulink
 26.1.2018 Praha Programování LEGO MINDSTORMS s použitím nástroje MATLAB a Simulink Jaroslav Jirkovský jirkovsky@humusoft.cz www.humusoft.cz info@humusoft.cz www.mathworks.com Co je MATLAB a Simulink 2
26.1.2018 Praha Programování LEGO MINDSTORMS s použitím nástroje MATLAB a Simulink Jaroslav Jirkovský jirkovsky@humusoft.cz www.humusoft.cz info@humusoft.cz www.mathworks.com Co je MATLAB a Simulink 2
Světlo 1) Světlo patří mezi elektromagnetické vlnění (jako rádiový signál, Tv signál) elmg. vlnění = elmg. záření
 Světlo patří mezi elektromagnetické vlnění (jako rádiový signál, Tv signál) elmg. vlnění = elmg. záření") OPTIKA = část fyziky, která se zabývá světlem Studuje zejména: vznik světla vlastnosti světla šíření světla opt. přístroje (opt. soustavami) Otto Wichterle (gelové kontaktní čočky) Světlo 1) Světlo patří
OPTIKA = část fyziky, která se zabývá světlem Studuje zejména: vznik světla vlastnosti světla šíření světla opt. přístroje (opt. soustavami) Otto Wichterle (gelové kontaktní čočky) Světlo 1) Světlo patří
PIV MEASURING INSIDE DRAFT TUBE OF MODEL WATER TURBINE PIV MĚŘENÍ V SAVCE MODELOVÉ VODNÍ TURBÍNY
 PIV MEASURING INSIDE DRAFT TUBE OF MODEL WATER TURBINE PIV MĚŘENÍ V SAVCE MODELOVÉ VODNÍ TURBÍNY Pavel ZUBÍK Abstrakt Příklad použití bezkontaktní měřicí metody rovinné laserové anemometrie (Particle Image
PIV MEASURING INSIDE DRAFT TUBE OF MODEL WATER TURBINE PIV MĚŘENÍ V SAVCE MODELOVÉ VODNÍ TURBÍNY Pavel ZUBÍK Abstrakt Příklad použití bezkontaktní měřicí metody rovinné laserové anemometrie (Particle Image
RF603 Měření vzdáleností triangulační technikou
 Princip měření: Měření senzorů je založeno na principu optické triangulace. Paprsek laseru ze zdroje světla 1 je zaměřen přes optiku 2 na objekt 6. Po odrazu od objektu je paprsek fokusován přes objektiv
Princip měření: Měření senzorů je založeno na principu optické triangulace. Paprsek laseru ze zdroje světla 1 je zaměřen přes optiku 2 na objekt 6. Po odrazu od objektu je paprsek fokusován přes objektiv
vážení za jízdy a automatické pokutování
 vážení za jízdy a automatické pokutování CrossWIM DYNAMICKÉ VÁŽENÍ VOZIDEL SE SYSTÉMEM AUTOMATICKÉHO POKUTOVÁNÍ CERTIFIKOVÁN JAKO STANOVENÉ MĚŘIDLO Vážení vozidel za jízdy a automatické pokutování CrossWIM
vážení za jízdy a automatické pokutování CrossWIM DYNAMICKÉ VÁŽENÍ VOZIDEL SE SYSTÉMEM AUTOMATICKÉHO POKUTOVÁNÍ CERTIFIKOVÁN JAKO STANOVENÉ MĚŘIDLO Vážení vozidel za jízdy a automatické pokutování CrossWIM
Ultrazvuková kontrola obvodových svarů potrubí
 Ultrazvuková kontrola obvodových svarů potrubí Úlohou automatického ultrazvukového zkoušení je zejména nahradit rentgenové zkoušení, protože je rychlejší, bezpečnější a podává lepší informace o velikosti
Ultrazvuková kontrola obvodových svarů potrubí Úlohou automatického ultrazvukového zkoušení je zejména nahradit rentgenové zkoušení, protože je rychlejší, bezpečnější a podává lepší informace o velikosti
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
2. Mechatronický výrobek 17
 Předmluva 1 Úvod 3 Ing. Gunnar Künzel 1. Úvod do mechatroniky 5 1.1 Vznik, vývoj a definice mechatroniky 5 1.2 Mechatronická soustava a její komponenty 9 1.3 Mechatronický systém a jeho struktura 11 1.4
Předmluva 1 Úvod 3 Ing. Gunnar Künzel 1. Úvod do mechatroniky 5 1.1 Vznik, vývoj a definice mechatroniky 5 1.2 Mechatronická soustava a její komponenty 9 1.3 Mechatronický systém a jeho struktura 11 1.4
Katalogový list ESD digitální systém pro kontrolu BGA, Exclusive OP Obj. číslo: Anotace
 Katalogový list www.abetec.cz ESD digitální systém pro kontrolu BGA, Exclusive OP019 156 Obj. číslo: 106000488 Výrobce: Optilia Anotace Optický inspekční systém pro kontrolu BGA. HD kamera s vysokým rozlišením.
Katalogový list www.abetec.cz ESD digitální systém pro kontrolu BGA, Exclusive OP019 156 Obj. číslo: 106000488 Výrobce: Optilia Anotace Optický inspekční systém pro kontrolu BGA. HD kamera s vysokým rozlišením.
Digitální fotogrammetrie
 Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
dodavatel vybavení provozoven firem ESD digitální systém pro kontrolu BGA, Standard OP Obj. číslo: Popis
 dodavatel vybavení provozoven firem www.abetec.cz ESD digitální systém pro kontrolu BGA, Standard OP019 155 Obj. číslo: 106000855 Výrobce: Optilia Popis Optický inspekční systém pro kontrolu BGA. HD kamera
dodavatel vybavení provozoven firem www.abetec.cz ESD digitální systém pro kontrolu BGA, Standard OP019 155 Obj. číslo: 106000855 Výrobce: Optilia Popis Optický inspekční systém pro kontrolu BGA. HD kamera
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Optoelektronické. BGL Vidlicové optické závory. snímače
 Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
ROZPOZNÁVÁNÍ Úvod, vymezení hřiště
 ROZPOZNÁVÁNÍ Úvod, vymezení hřiště Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,
ROZPOZNÁVÁNÍ Úvod, vymezení hřiště Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
Moderní trendy měření Radomil Sikora
 Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
3.2 MATEMATIKA A JEJÍ APLIKACE (M) Charakteristika vzdělávací oblasti
 Charakteristika vzdělávací oblasti") 3.2 MATEMATIKA A JEJÍ APLIKACE (M) 51 Charakteristika vzdělávací oblasti Vzdělávací oblast matematika a její aplikace v základním vzdělávání je založena především na aktivních činnostech, které jsou typické
3.2 MATEMATIKA A JEJÍ APLIKACE (M) 51 Charakteristika vzdělávací oblasti Vzdělávací oblast matematika a její aplikace v základním vzdělávání je založena především na aktivních činnostech, které jsou typické
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
EXTRAKT z české technické normy
 EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním 35.240.60 materiálem o normě. Komunikační infrastruktura pro pozemní mobilní zařízení (CALM) Architektura
EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním 35.240.60 materiálem o normě. Komunikační infrastruktura pro pozemní mobilní zařízení (CALM) Architektura
OBRAZOVÁ ANALÝZA. Speciální technika a měření v oděvní výrobě
 OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
Teorie systémů TES 3. Sběr dat, vzorkování
 Evropský sociální fond. Praha & EU: Investujeme do vaší budoucnosti. Teorie systémů TES 3. Sběr dat, vzorkování ZS 2011/2012 prof. Ing. Petr Moos, CSc. Ústav informatiky a telekomunikací Fakulta dopravní
Evropský sociální fond. Praha & EU: Investujeme do vaší budoucnosti. Teorie systémů TES 3. Sběr dat, vzorkování ZS 2011/2012 prof. Ing. Petr Moos, CSc. Ústav informatiky a telekomunikací Fakulta dopravní
Problematika snímání skla a kvalifikace povrchové struktury
 Problematika snímání skla a kvalifikace povrchové struktury Vlastimil Hotař, Katedra sklářských strojů a robotiky, Technická univerzita v Liberci Seminář moderní metody rozpoznávání a zpracování obrazových
Problematika snímání skla a kvalifikace povrchové struktury Vlastimil Hotař, Katedra sklářských strojů a robotiky, Technická univerzita v Liberci Seminář moderní metody rozpoznávání a zpracování obrazových
Optoelektronické. snímače BOS 26K
 Typová řada představuje další logický vývoj již úspěšné konstrukce: jednotné pouzdro pro všechny použité typy snímačů. Z tohoto důvodu je řada kompatibilní s řadou BOS 5K a doplňuje ji novými druhy snímačů
Typová řada představuje další logický vývoj již úspěšné konstrukce: jednotné pouzdro pro všechny použité typy snímačů. Z tohoto důvodu je řada kompatibilní s řadou BOS 5K a doplňuje ji novými druhy snímačů
Progresivní diagnostické metody pro monitorování vývoje stavu vozovek PK
 Progresivní diagnostické metody pro monitorování vývoje stavu vozovek PK Autor: Josef Stryk, Radek Matula, Ilja Březina, Michal Janků, CDV, WP6 Příspěvek byl zpracován za podpory programu Centra kompetence
Progresivní diagnostické metody pro monitorování vývoje stavu vozovek PK Autor: Josef Stryk, Radek Matula, Ilja Březina, Michal Janků, CDV, WP6 Příspěvek byl zpracován za podpory programu Centra kompetence
Nikolić Aleksandra Matěj Martin
 POSTAVENÍ Í PEDAGOGIKY MEZI VĚDAMI Nikolić Aleksandra Matěj Martin PŮVOD NÁZVU Paidagogos = pais + agein Pais = dítě Agein = vést průvodce dětí, často vzdělaný otrok pečoval o výchovu dětí ze zámožných
POSTAVENÍ Í PEDAGOGIKY MEZI VĚDAMI Nikolić Aleksandra Matěj Martin PŮVOD NÁZVU Paidagogos = pais + agein Pais = dítě Agein = vést průvodce dětí, často vzdělaný otrok pečoval o výchovu dětí ze zámožných
Projekt IMPLEMENTACE ŠVP. pořadí početních operací, dělitelnost, společný dělitel a násobek, základní početní operace
 Střední škola umělecká a řemeslná Evropský sociální fond "Praha a EU: Investujeme do vaší budoucnosti" Projekt IMPLEMENTACE ŠVP Evaluace a aktualizace metodiky předmětu Matematika Výrazy Obory nástavbového
Střední škola umělecká a řemeslná Evropský sociální fond "Praha a EU: Investujeme do vaší budoucnosti" Projekt IMPLEMENTACE ŠVP Evaluace a aktualizace metodiky předmětu Matematika Výrazy Obory nástavbového
EXPERIMENTÁLNÍ METODY. Ing. Jiří Litoš, Ph.D.
 EXPERIMENTÁLNÍ METODY Ing. Jiří Litoš, Ph.D. 01 Experimentální zkoušení KDE? V laboratoři In-situ (na stavbách) CO? Modely konstrukčních částí Menší konstrukční části Modely celých konstrukcí Celé konstrukce
EXPERIMENTÁLNÍ METODY Ing. Jiří Litoš, Ph.D. 01 Experimentální zkoušení KDE? V laboratoři In-situ (na stavbách) CO? Modely konstrukčních částí Menší konstrukční části Modely celých konstrukcí Celé konstrukce
Moderní systémy pro získávání znalostí z informací a dat
 Moderní systémy pro získávání znalostí z informací a dat Jan Žižka IBA Institut biostatistiky a analýz PřF & LF, Masarykova universita Kamenice 126/3, 625 00 Brno Email: zizka@iba.muni.cz Bioinformatika:
Moderní systémy pro získávání znalostí z informací a dat Jan Žižka IBA Institut biostatistiky a analýz PřF & LF, Masarykova universita Kamenice 126/3, 625 00 Brno Email: zizka@iba.muni.cz Bioinformatika:
KAMEROVÉ SYSTÉMY PRO MONITOROVÁNÍ DOPRAVY
 Měření úsekové rychlosti Detekce jízdy na červenou Noční vidění Dopravní statistiky Měření dojezdových dob Automatické čtení SPZ/RZ Video-detekce Sběr dopravních dat Klasifikace vozidel Mýto Automatické
Měření úsekové rychlosti Detekce jízdy na červenou Noční vidění Dopravní statistiky Měření dojezdových dob Automatické čtení SPZ/RZ Video-detekce Sběr dopravních dat Klasifikace vozidel Mýto Automatické
Matematika a její aplikace Matematika
 Vzdělávací oblast : Vyučovací předmět : Období ročník : Počet hodin : 165 Matematika a její aplikace Matematika 2. období 5. ročník Učební texty : J. Justová: Alter-Matematika, Matematika 5.r.I.díl, 5.r.
Vzdělávací oblast : Vyučovací předmět : Období ročník : Počet hodin : 165 Matematika a její aplikace Matematika 2. období 5. ročník Učební texty : J. Justová: Alter-Matematika, Matematika 5.r.I.díl, 5.r.
Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol:
 Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro
Název: Světlo. Kalibrace světelného senzoru. Tematický celek: Světelné a zvukové jevy. Úkol: 1. Zopakuj si, co je to světlo a jak se šíří. 2. Zjisti, jak pracuje světelný senzor. 3. Navrhni robota pro
Téma dizertační práce - Strategie ŠKODA AUTO pro čínský trh
 Téma dizertační práce - Strategie ŠKODA AUTO pro čínský trh - Spolupráce při stanovování dlouhodobé strategie ŠKODA AUTO pro čínský trh se zaměřením na produktový management - Analýza současné pozice ŠKODA
Téma dizertační práce - Strategie ŠKODA AUTO pro čínský trh - Spolupráce při stanovování dlouhodobé strategie ŠKODA AUTO pro čínský trh se zaměřením na produktový management - Analýza současné pozice ŠKODA
SNÍMAČE PRO MĚŘENÍ TEPLOTY
 SNÍMAČE PRO MĚŘENÍ TEPLOTY 10.1. Kontaktní snímače teploty 10.2. Bezkontaktní snímače teploty 10.1. KONTAKTNÍ SNÍMAČE TEPLOTY Experimentální metody přednáška 10 snímač je připevněn na měřený objekt 10.1.1.
SNÍMAČE PRO MĚŘENÍ TEPLOTY 10.1. Kontaktní snímače teploty 10.2. Bezkontaktní snímače teploty 10.1. KONTAKTNÍ SNÍMAČE TEPLOTY Experimentální metody přednáška 10 snímač je připevněn na měřený objekt 10.1.1.
5.15 INFORMATIKA A VÝPOČETNÍ TECHNIKA
 5.15 INFORMATIKA A VÝPOČETNÍ TECHNIKA 5. 15. 1 Charakteristika předmětu A. Obsahové vymezení: IVT se na naší škole vyučuje od tercie, kdy je cílem zvládnutí základů hardwaru, softwaru a operačního systému,
5.15 INFORMATIKA A VÝPOČETNÍ TECHNIKA 5. 15. 1 Charakteristika předmětu A. Obsahové vymezení: IVT se na naší škole vyučuje od tercie, kdy je cílem zvládnutí základů hardwaru, softwaru a operačního systému,
DPZ Dálkový Průzkum Země. Luděk Augusta Aug007, Vojtěch Lysoněk Lys034
 DPZ Dálkový Průzkum Země 1 Obsah Úvod Historie DPZ Techniky DPZ Ukázky 2 DPZ znamená Dálkový průzkum Země nám dává informace o vlastnostech objektů na zemském povrchu s využitím informací získaných v globálním
DPZ Dálkový Průzkum Země 1 Obsah Úvod Historie DPZ Techniky DPZ Ukázky 2 DPZ znamená Dálkový průzkum Země nám dává informace o vlastnostech objektů na zemském povrchu s využitím informací získaných v globálním
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY
 1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
školní vzdělávací program ŠKOLNÍ VZDĚLÁVACÍ PROGRAM DR. J. PEKAŘE V MLADÉ BOLESLAVI RVP G 8-leté gymnázium Fyzika II. Gymnázium Dr.
 školní vzdělávací program PLACE HERE Název školy Adresa Palackého 211, Mladá Boleslav 293 80 Název ŠVP Platnost 1.9.2009 Dosažené vzdělání Střední vzdělání s maturitní zkouškou Název RVP Délka studia v
školní vzdělávací program PLACE HERE Název školy Adresa Palackého 211, Mladá Boleslav 293 80 Název ŠVP Platnost 1.9.2009 Dosažené vzdělání Střední vzdělání s maturitní zkouškou Název RVP Délka studia v
Ultrazvuková defektoskopie. M. Kreidl, R. Šmíd, V. Matz, S. Štarman
 Ultrazvuková defektoskopie M. Kreidl, R. Šmíd, V. Matz, S. Štarman Praha 2011 ISBN 978-80-254-6606-3 2 OBSAH 1. Předmluva 7 2. Základní pojmy 9 2.1. Fyzikální základy ultrazvuku a akustické veličiny 9
Ultrazvuková defektoskopie M. Kreidl, R. Šmíd, V. Matz, S. Štarman Praha 2011 ISBN 978-80-254-6606-3 2 OBSAH 1. Předmluva 7 2. Základní pojmy 9 2.1. Fyzikální základy ultrazvuku a akustické veličiny 9
1 SENZORY V MECHATRONICKÝCH SOUSTAVÁCH
 1 V MECHATRONICKÝCH SOUSTAVÁCH Senzor - důležitá součást většiny moderních elektronických zařízení. Účel: Zjišťovat přítomnost různých fyzikálních, většinou neelektrických veličin, a umožnit další zpracování
1 V MECHATRONICKÝCH SOUSTAVÁCH Senzor - důležitá součást většiny moderních elektronických zařízení. Účel: Zjišťovat přítomnost různých fyzikálních, většinou neelektrických veličin, a umožnit další zpracování
08 - Optika a Akustika
 08 - Optika a Akustika Zvuk je mechanické vlnění v látkovém prostředí, které je schopno vyvolat sluchový vjem. Člověk je schopen vnímat vlnění o frekvenci 16 Hz až 20000 Hz (20kHz). Frekvenci nižší než
08 - Optika a Akustika Zvuk je mechanické vlnění v látkovém prostředí, které je schopno vyvolat sluchový vjem. Člověk je schopen vnímat vlnění o frekvenci 16 Hz až 20000 Hz (20kHz). Frekvenci nižší než
FAKULTA ELEKTROTECHNICKÁ Spojujeme elektrotechniku a informatiku PRACUJ V OBORU. S OBRATEM VÍCE NEŽ MILIARD Kč
 FAKULTA ELEKTROTECHNICKÁ Spojujeme elektrotechniku a informatiku PRACUJ V OBORU S OBRATEM VÍCE NEŽ MILIARD Kč (celosvětový roční výnos mobilních operátorů zdroj Strategy Analytics 2013) Studuj obory KOMUNIKAČNÍ
FAKULTA ELEKTROTECHNICKÁ Spojujeme elektrotechniku a informatiku PRACUJ V OBORU S OBRATEM VÍCE NEŽ MILIARD Kč (celosvětový roční výnos mobilních operátorů zdroj Strategy Analytics 2013) Studuj obory KOMUNIKAČNÍ
Inteligentní analýza obrazu. Ing. Robert Šimčík
 Inteligentní analýza obrazu Ing. Robert Šimčík Jaký je přínos video analýzy? 2 Typické CCTV pracoviště? Příliš mnoho kamer! Pomoc! 3 Proč použít video analýzu? Analýza tisíců video záznamů Redukce zátěže
Inteligentní analýza obrazu Ing. Robert Šimčík Jaký je přínos video analýzy? 2 Typické CCTV pracoviště? Příliš mnoho kamer! Pomoc! 3 Proč použít video analýzu? Analýza tisíců video záznamů Redukce zátěže
Tomáš Goller GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz
 Tomáš Goller GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz Hlavní cíle společnosti GEMOS CZ Komplexní řešení dopravy v lokalitách měst a obcí Zvýšení bezpečnosti
Tomáš Goller GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz Hlavní cíle společnosti GEMOS CZ Komplexní řešení dopravy v lokalitách měst a obcí Zvýšení bezpečnosti
Bezpečnostní mechanismy
 Hardwarové prostředky kontroly přístupu osob Bezpečnostní mechanismy Identifikační karty informace umožňující identifikaci uživatele PIN Personal Identification Number úroveň oprávnění informace o povolených
Hardwarové prostředky kontroly přístupu osob Bezpečnostní mechanismy Identifikační karty informace umožňující identifikaci uživatele PIN Personal Identification Number úroveň oprávnění informace o povolených
Praha, červen 2009. Ing. Michal Sedlák GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz
 Praha, červen 2009 Ing. Michal Sedlák GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz Hlavní cíle projektu Klidné město-obec Komplexní řešení dopravy v lokalitách měst
Praha, červen 2009 Ing. Michal Sedlák GEMOS CZ, spol. s r.o. B.Smetany 1599 250 88 Čelákovice www.gemos.cz sedlak@gemos.cz Hlavní cíle projektu Klidné město-obec Komplexní řešení dopravy v lokalitách měst
Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 78-42-M/01 Technické lyceum STROJNICTVÍ
 Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 78-42-M/01 Technické lyceum STROJNICTVÍ 1. Mechanické vlastnosti materiálů 2. Technologické vlastnosti materiálů 3. Zjišťování
Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 78-42-M/01 Technické lyceum STROJNICTVÍ 1. Mechanické vlastnosti materiálů 2. Technologické vlastnosti materiálů 3. Zjišťování