Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
|
|
|
- Věra Procházková
- před 9 lety
- Počet zobrazení:
Transkript
1 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního pochodu 9)
 Stabilita regulačního obvodu 8) Kvalita")
2 Osnova přednášky Členění manipulačních zařízení Kinematika robotů Kinematické struktury robotů Způsoby řízení robotů

3 Členění manipulačních zařízení Podle prováděné práce Manipulační (podávání součástek a polotovarů) Technologické (svařovací, montážní, nanášení povlaků) Speciální (pracují pod vodou, v radioaktivních prostředích, v kosmu) Univerzální (kombinuje předchozí procesy)
 Univerzální (kombinuje")
4 Členění manipulačních zařízení Manipulační zařízení Jednoúčelové manipulátory Programovatelné manipulátory Robot 1. generace pevný program Robot 2. generace měnitelný program Robot 3. generace inteligentní robot

5 Robot 1. generace Pevně naprogramovaný postup výrobních operací Změna postupu změna programu Systém zdvihni umísti

6 Robot 2. generace Vybavení senzory nebo kamerou Systém udělej a ověř

7 Robot 3. generace Přizpůsobení podmínkám Učí se; samostatně řeší zadané úkoly

8 Osnova přednášky Členění manipulačních zařízení Kinematika robotů Kinematické struktury robotů Způsoby řízení robotů

9 Kinematika robotů Posuvné kinematické dvojice (translační) Suportové po delším vedení se posouvá kratší těleso Smykadlové v kratším vedení se posouvá delší těleso Výsuvné - teleskopické

10 Kinematika robotů Rotační kinematické dvojice Otočné Kyvné

11 Kinematika robotů Kinematická struktura Vzájemně spojené dvojice vytváří kinematické řetězce. Tyto řetězce potom vytvoří kinematickou strukturu robotu

12 Osnova přednášky Členění manipulačních zařízení Kinematika robotů Kinematické struktury robotů Způsoby řízení robotů

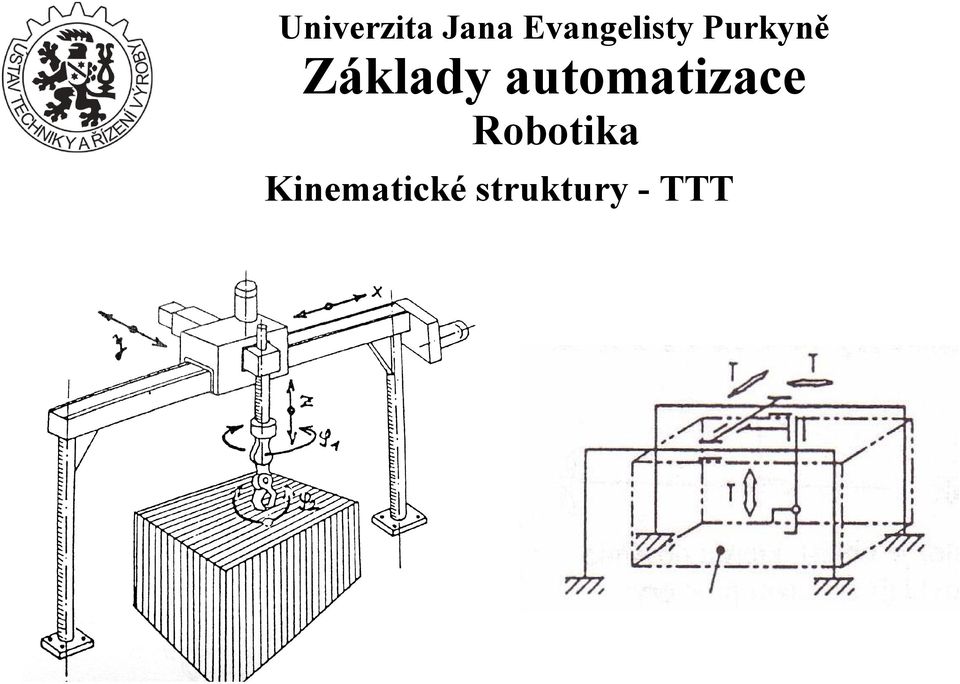
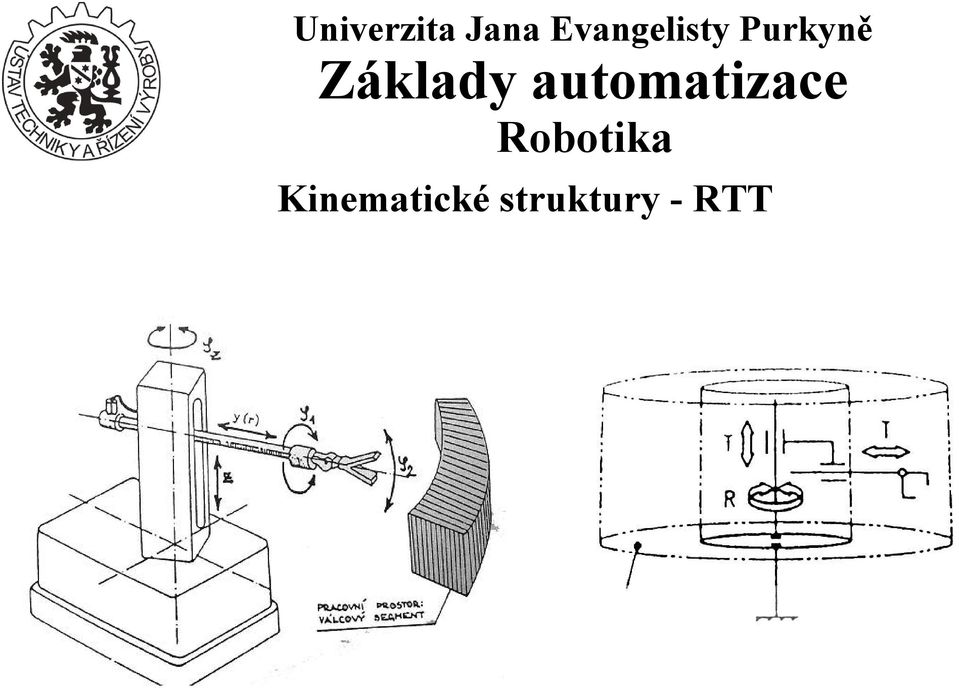
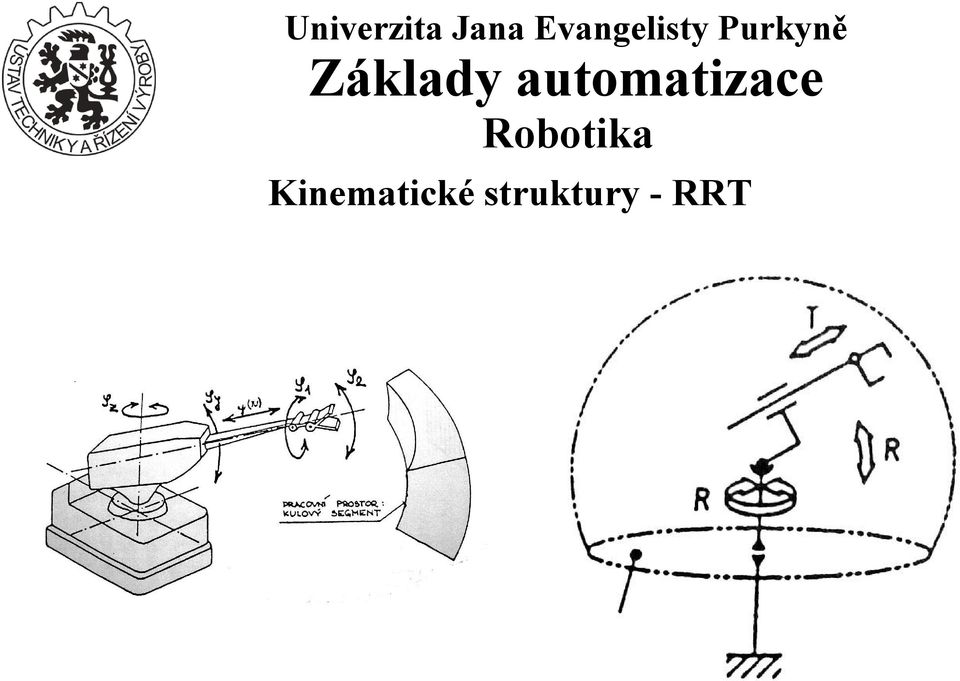
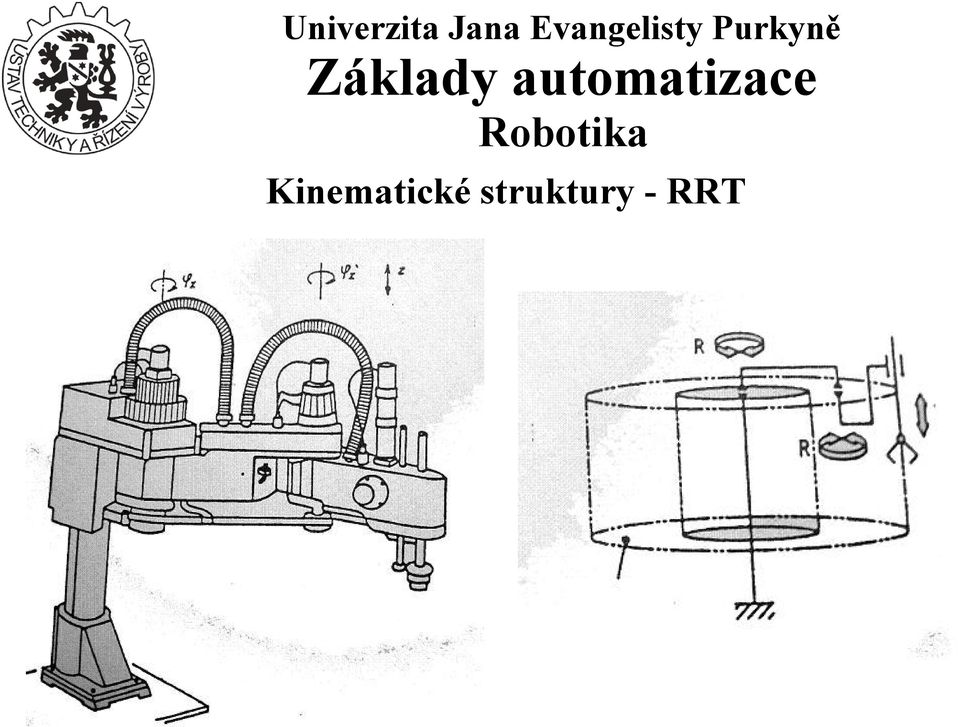
13 Kinematické struktury Nejrozšířenější typy kinematických struktur Tři translační kinematické dvojice...ttt Jedna rotační a dvě translační dvojice...rtt Dvě rotační a jedna translační dvojice...rrt Tři rotační dvojice...rrr

14 Kinematické struktury - TTT
15 Kinematické struktury - RTT
16 Kinematické struktury - RRT

17 Kinematické struktury - RRT
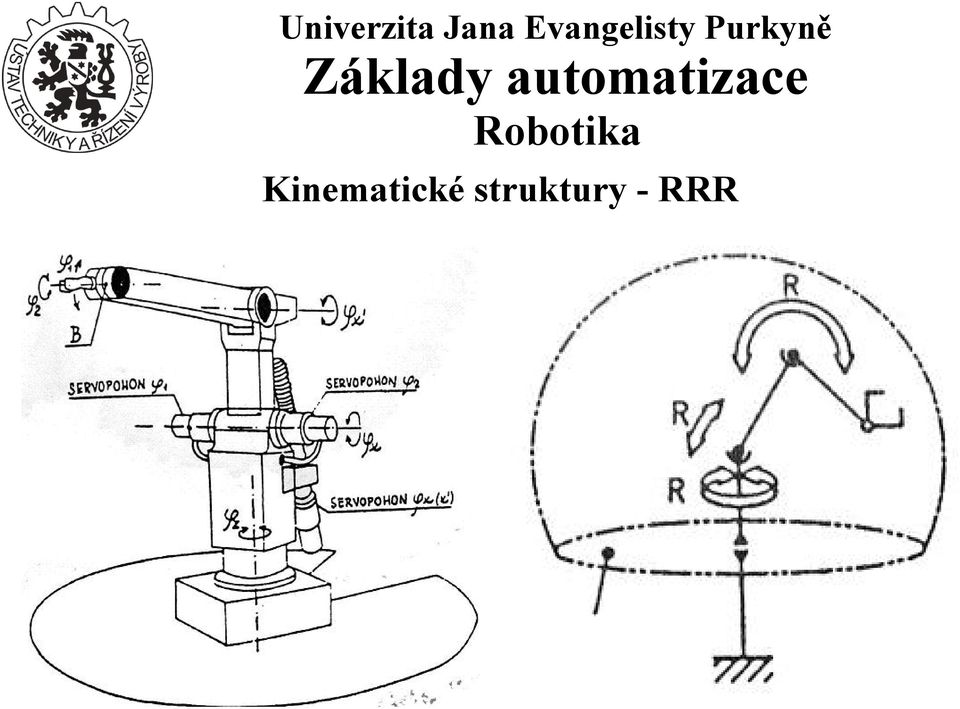
18 Kinematické struktury - RRR
19 Hlediska pro posuzování průmyslových robotů 1. Manipulační schopnost Stavba robota Velikost pracovního prostoru 4. Počet stupňů volnosti 5. Hmotnost manipulovaného břemene 6. Dosahovaná přesnost 7. Rychlost pohybů 8. Konstrukce robotu 9. Způsob řízení

20 Hlediska pro posuzování průmyslových robotů Stupně volnosti Osa v prostoru s níž je spojen pohyb (ruka bez prstů 7 volnosti rameno 2; paže 1; loket 1; předloktí 1; zápěstí 2) Obecně pro zajištění polohy 3 a pro orientaci 3 celkem 6
 Obecně pro zajištění polohy 3 a pro orientaci")
21 Hlediska pro posuzování průmyslových robotů Manipulační hmotnost břemene Manipulační hmotnost = hmotnost břemene + hmotnost uchopovacího mechanizmu Hmotnostní řady např. 1; 4; 16; 30; 45; 65; 80; 100 kg Přesnost manipulace Přesnost polohování maximální odchylka mezi požadovanou a skutečnou polohou do libovolného bodu pracovního prostoru Opakovaná přesnost vyšší, do cíle se dojíždí za stejných podmínek rychlost a směr Geometrická přesnost dráhy pro speciální aplikace (svařování; odstraňování otřepů)
22 Osnova přednášky Členění manipulačních zařízení Kinematika robotů Kinematické struktury robotů Způsoby řízení robotů
23 Pojezd robotů Delší pohyb, nemusí být přímočarý Pojezdové ústrojí Otočná řízená kolečka Pojezdové pásy Pozemní kolejová dráha Závěsná dráha
24 Přímočarý pohyb Suportový Smykadlový (do 1 m délky) Teleskopický Vedení přímočarého pohybu Valivá uložení: kuličky; válečky; jehly; kladky Tvar vedení: čtvercový; trojboký; rybinový; kruhový
25 Rotační pohyb Přímý náhon Nepřímý náhon s převodem Ozubenými koly Řemenem; ozubeným řemenem
26 Kývavý pohyb Pohyb menší než 360 Vahadla a písty Hřebenový pohon nebo pohybový šroub Kyvné rameno poháněné pneuválcem nebo pohybovým šroubem
27 Kývavý pohyb Pohyb menší než 360 Vahadla Hřebenový pohon nebo pohybový šroub Kyvné rameno poháněné pneuválcem nebo pohybovým šroubem
28 Kývavý pohyb Pohyb menší než 360 Vahadla Hřebenový pohon nebo pohybový šroub Kyvné rameno poháněné pneuválcem nebo pohybovým šroubem
29 Pohony Mechanické jednoduché a jednoúčelové manipulátory; vačkové a pákové mechanizmy Hydraulické vyšší síly při menší hmotnosti; plynulé řízení a bezpečnost proti přetížení. N. - teplotní závislost; ztráty oleje netěsnostmi. Pneumatické V. - čistota; jednoduchá údržba; nízké pořizovací náklady. N. - elasticita vzduchu; obtížná regulace; vyšší hlučnost a energetické náklady Elektrické stejnosměrné motory s kotoučovým rotorem Krokové motory s aktivním rotorem; reakční Střídavé motory
30 Převody Ozubená kola Ozubený hřeben Šroub a matice Kuličkový šroub a matice Řemenové převody s ozubeným řemenem Řetězové převody Šnekové převody Planetové převody Harmonické převody
31 Ozubená kola Přenos rotačních pohybů Malá osová vzdálenost Kuželový převod různoběžné osy
32 Ozubený hřeben Převod rotačních na translační a obráceně Časté použití u chapadel
33 Šroub a matice Přenos rotačního na translační pohyb
34 Kuličkový šroub a matice Převod rotační translační Přesné převody Malé ztráty třením Výrobně náročné Nákladné
35 Řemenový převod s ozubeným řemenem Přenos rotačních i translačních pohybů i = 10 Tichý chod Dobrý tlumící účinek Bez skluzu
36 Řetězové převody Přenos menších a středních výkonů Přenos rotačních i translačních pohybů i=7 Tichý chod Snadná montáž Nutnost napínání
37 Šnekové převody Přenos rotačních pohybů Vysoké převody Malá účinnost Samosvornost
38 Planetové převody Nemají vysoké převody Výrobně náročné Nákladné
39 Harmonické převody Vysoké převody i = 150 Velmi přesné Bez vůle Výrobně náročné Nákladné
40 Pracovní hlavice chapadla Co nejlehčí Bezpečné uchopení a uvolnění předmětu Typy: Mechanické - nejpoužívanější Pneumatické podtlakové; rovinné a rozbitné materiály Elektromagnetické Vícenásobné hlavice Výměnné hlavice
41 Mechanická chapadla
42 Mechanická chapadla
43 Druhy chapadel
44 Pneumatické chapadlo Elektromagnetické chapadlo
45 Vícenásobná - výměnné hlavice
46 Osnova přednášky Členění manipulačních zařízení Kinematika robotů Kinematické struktury robotů Způsoby řízení robotů
47 Způsob řízení robotů Kartézsská soustava souřadná Souřadnice ramene X; Y; Z pravoúhlé souřadnice A; B; C rotační osa Souřadnice bodu: S1=(X;Y;Z;A;B;C)
48 Způsob řízení robotů Kartézsská soustava souřadná Souřadnice chapadla XG; YG; ZG pravoúhlé souřadnice Poloha chapadla:
49 Způsob řízení robotů X: X=L2 sin L3 cos 90 Z : Z=L1 L2cos L3cos 90
50 Opakovací otázky Jak členíme manipulační zařízení? Jaké známe kinematické dvojice? Nakreslete hlavní schémata robotů. Jaká jsou kritéria pro posuzování průmyslových robotů? Vysvětlete co je stupeň volnosti a kolik jich potřebujeme pro zajištění orientace. 6. Jaká znáte pojezdová ústrojí? 7. Jakým způsobem řešíme přímočarý pohyb? 8. Jakým způsobem řešíme rotační a kývavý pohyb? 9. Jaké znáte druhy pohonů pro roboty? 10. Jaké znáte typy převodů a popište jejich vlastnosti. 11. Popište příklady ovládání chapadel. 12. Nakreslete schematicky druhy chapadel 13. Vysvětlete jakým způsobem určujeme body v prostoru pro roboty
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
24. Úvod do robotiky. 24.1. Vlastnosti robotů. 24.2. Oblasti použití průmyslových robotů. 24.3. Rozdělení průmyslových robotů. Definice: Robotika
 oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
24. Úvod do robotiky Vlastnosti robotů Oblasti použití průmyslových robotů Rozdělení průmyslových robotů. Definice: Robotika
 zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
VÝROBNÍ STROJE. EduCom. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita v Liberci
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Základní pojmy; algoritmizace úlohy Osnova kurzu
 Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) Kladka kladka - F=G, #2 #3
 Kladka kladka - F=G, #2 #3") zapis_dopravni_stroje_jeraby08/2012 STR Fb 1 z 5 23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) #1 Kladka kladka - F=G, #2 #3 kladka - F=G/2
zapis_dopravni_stroje_jeraby08/2012 STR Fb 1 z 5 23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) #1 Kladka kladka - F=G, #2 #3 kladka - F=G/2
26. Konstrukce robotů Schéma konstrukce robotu
 zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Kvalita regulačního pochodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5. www.feeler-cnc.cz
 INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5 www.feeler-cnc.cz CNC portálová obráběcí centra řady FV FV-3214 FV-3214 O výměnu nástrojů se stará spolehlivý řetězový zásobník s výměnnou rukou
INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5 www.feeler-cnc.cz CNC portálová obráběcí centra řady FV FV-3214 FV-3214 O výměnu nástrojů se stará spolehlivý řetězový zásobník s výměnnou rukou
26. Konstrukce robotů
 oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
26. Konstrukce robotů
 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
SEZNAM TÉMAT K ÚSTNÍ PROFILOVÉ ZKOUŠCE ZE STROJNICTVÍ
 SEZNAM TÉMAT K ÚSTNÍ PROFILOVÉ ZKOUŠCE ZE STROJNICTVÍ Školní rok: 2012/2013 Obor: 23-44-L/001 Mechanik strojů a zařízení 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení
SEZNAM TÉMAT K ÚSTNÍ PROFILOVÉ ZKOUŠCE ZE STROJNICTVÍ Školní rok: 2012/2013 Obor: 23-44-L/001 Mechanik strojů a zařízení 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení
15.14 Vačkové mechanismy
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
JEŘÁBY. Dílenský mobilní hydraulický jeřábek. Sloupový otočný jeřáb. Konzolové jeřáby otočné a pojízdné
 JEŘÁBY Dílenský mobilní hydraulický jeřábek Pro dílny a opravárenské provozy. Rameno zvedáno hydraulicky ručním čerpáním hydraulické kapaliny. Sloupový otočný jeřáb OTOČNÉ RAMENO SLOUP Sloupový jeřáb je
JEŘÁBY Dílenský mobilní hydraulický jeřábek Pro dílny a opravárenské provozy. Rameno zvedáno hydraulicky ručním čerpáním hydraulické kapaliny. Sloupový otočný jeřáb OTOČNÉ RAMENO SLOUP Sloupový jeřáb je
Název zpracovaného celku: Řízení automobilu. 2.natočit kola tak,aby každé z nich opisovalo daný poloměr zatáčení-nejsou natočena stejně
 Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 14.9.2012 Název zpracovaného celku: Řízení automobilu Řízení je nedílnou součástí automobilu a musí zajistit: 1.natočení kol do rejdu změna
Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 14.9.2012 Název zpracovaného celku: Řízení automobilu Řízení je nedílnou součástí automobilu a musí zajistit: 1.natočení kol do rejdu změna
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Klíčová slova: zvedák, kladkostroj, visutá kočka, naviják
 Předmět: Stavba a provoz strojů Ročník: 4. Anotace: Digitální učební materiál zpracovaný na téma zdvihadla, představuje základní přehled o stavbě a rozdělení zvedáků, kladkostrojů a navijáků. Rovněž je
Předmět: Stavba a provoz strojů Ročník: 4. Anotace: Digitální učební materiál zpracovaný na téma zdvihadla, představuje základní přehled o stavbě a rozdělení zvedáků, kladkostrojů a navijáků. Rovněž je
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Pohonné systémy OS. 1.Technické principy 2.Hlavní pohonný systém
 Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ
 OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení spojů z hlediska fyzikální podstaty funkce 2. Spoje se silovým stykem šroubové
OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení spojů z hlediska fyzikální podstaty funkce 2. Spoje se silovým stykem šroubové
Binární logika Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
k DUM 08. pdf ze šablony 2_šablona_automatizační_technika_II 02 tematický okruh sady: pohony automatických linek
 METODICKÝ LIST Téma DUM: Test Anotace: Autor: k DUM 08. pdf ze šablony 2_šablona_automatizační_technika_II 02 tematický okruh sady: pohony automatických linek Digitální učební materiál slouží k výuce pohonů
METODICKÝ LIST Téma DUM: Test Anotace: Autor: k DUM 08. pdf ze šablony 2_šablona_automatizační_technika_II 02 tematický okruh sady: pohony automatických linek Digitální učební materiál slouží k výuce pohonů
Hydraulika ve strojírenství
 Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Algebra blokových schémat Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ HŘÍDELE A ČEPY
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
Schéma stroje (automobilu) M #1
 M #1") zapis_casti_stroju_hridele08/2012 STR Ba 1 z 6 Části strojů Schéma stroje (automobilu) M #1 zdroj pohybu - elektrický nebo spalovací H #2 válcové části pro přenos otáčivého pohybu S #3 spojují, příp. rozpojují
zapis_casti_stroju_hridele08/2012 STR Ba 1 z 6 Části strojů Schéma stroje (automobilu) M #1 zdroj pohybu - elektrický nebo spalovací H #2 válcové části pro přenos otáčivého pohybu S #3 spojují, příp. rozpojují
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Univerzita Jana Evangelisty Purkyně Automatizace Téma: Datová komunikace. Osnova přednášky
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.
![MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.](/thumbs/91/105892726.jpg "MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.") MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM. www.feeler-cnc.cz
 INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM www.feeler-cnc.cz CNC horizontální obráběcí centra řady FMH FMH-500 (č.40) Rám tvaru T má integrované tříúrovňové vedení s žebrovanou výztuží
INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM www.feeler-cnc.cz CNC horizontální obráběcí centra řady FMH FMH-500 (č.40) Rám tvaru T má integrované tříúrovňové vedení s žebrovanou výztuží
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM
 MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v
MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v
HCW 1000 NOVÝ TYP LEHKÉ HORIZONTKY ŠKODA
 HCW 1000 NOVÝ TYP LEHKÉ HORIZONTKY ŠKODA PŘEDSTAVENÍ STROJE HCW 1000 ŠKODA MACHINE TOOL a.s. pokračuje ve více než 100leté tradici výroby přesných obráběcích strojů. Na základě výsledků situační analýzy
HCW 1000 NOVÝ TYP LEHKÉ HORIZONTKY ŠKODA PŘEDSTAVENÍ STROJE HCW 1000 ŠKODA MACHINE TOOL a.s. pokračuje ve více než 100leté tradici výroby přesných obráběcích strojů. Na základě výsledků situační analýzy
CNC soustruhy SF... STANDARDNÍ PŘÍSLUŠENSTVÍ STROJE VOLITELNÉ PŘÍSLUŠENSTVÍ STROJE SF 43 CNC WWW.FERMATMACHINERY.COM
 CNC soustruhy řady SF - s vodorovným ložem Stroje tohoto konstrukčního řešení jsou univerzální modifikovatelné ve 2 (X, Z) i ve 3 (X, Z, C) osách souvisle řízené soustruhy s vodorovným ložem a jsou určeny
CNC soustruhy řady SF - s vodorovným ložem Stroje tohoto konstrukčního řešení jsou univerzální modifikovatelné ve 2 (X, Z) i ve 3 (X, Z, C) osách souvisle řízené soustruhy s vodorovným ložem a jsou určeny
ASM 5osé univerzální centrum
 5osé univerzální centrum 3 Přesnost Polohování P 0,01mm, Ps 0,005mm. Rychlost 40 m/min, zrychlení 3 m/s-2 Obrábění Univerzální 5osé, 57/75 kw výkon, možnost vertikálního soustružení. 6 D ynamický vřeteník
5osé univerzální centrum 3 Přesnost Polohování P 0,01mm, Ps 0,005mm. Rychlost 40 m/min, zrychlení 3 m/s-2 Obrábění Univerzální 5osé, 57/75 kw výkon, možnost vertikálního soustružení. 6 D ynamický vřeteník
Hydrodynamické mechanismy
 Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
typ LC 590 Automat Ref. No. 16.110
 Ferdus, s.r.o. J. Fučíka 699, 768 11 Chropyně e-mail: info@ferdus.cz, tel./fax: 577 103 566, 573 356 390 E-OBCHOD : www.ferdus.cz Montážní stroj nákladních a traktorových pneumatik typ LC 590 Automat Ref.
Ferdus, s.r.o. J. Fučíka 699, 768 11 Chropyně e-mail: info@ferdus.cz, tel./fax: 577 103 566, 573 356 390 E-OBCHOD : www.ferdus.cz Montážní stroj nákladních a traktorových pneumatik typ LC 590 Automat Ref.
Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 23-41-M/01 Strojírenství STROJÍRENSKÁ TECHNOLOGIE
 Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 23-41-M/01 Strojírenství STROJÍRENSKÁ TECHNOLOGIE 1. Mechanické vlastnosti materiálů, zkouška pevnosti v tahu 2. Mechanické
Stanovení forem, termínů a témat profilové části maturitní zkoušky oboru vzdělání 23-41-M/01 Strojírenství STROJÍRENSKÁ TECHNOLOGIE 1. Mechanické vlastnosti materiálů, zkouška pevnosti v tahu 2. Mechanické
VERTIKÁLNÍ OBRÁBECÍ CENTRA
 CNC MACHINERY VERTIKÁLNÍ OBRÁBECÍ CENTRA lineární valivé vedení vysoká přesnost polohování rychlá a spolehlivá výměna nástroje tuhá konstrukce stroje vysoká dynamika stroje precizní vysokorychlostní vřeteno
CNC MACHINERY VERTIKÁLNÍ OBRÁBECÍ CENTRA lineární valivé vedení vysoká přesnost polohování rychlá a spolehlivá výměna nástroje tuhá konstrukce stroje vysoká dynamika stroje precizní vysokorychlostní vřeteno
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
18.4. Kulisový mechanismus
 zapis_kinematicke_mechanismy_208/2012 STR Cd 1 z 6 18.4. Kulisový mechanismus Mění otáčivý pohyb na #1 pohyb nebo naopak Průběh rychlosti přímočarého pohybu je #2 než u klikového mechanismu 18.4.1. Kulisový
zapis_kinematicke_mechanismy_208/2012 STR Cd 1 z 6 18.4. Kulisový mechanismus Mění otáčivý pohyb na #1 pohyb nebo naopak Průběh rychlosti přímočarého pohybu je #2 než u klikového mechanismu 18.4.1. Kulisový
Podklady k 1. cvičení z předmětu KME / MECH2
 Podklady k 1. cvičení z předmětu KME / MECH2 (zpracoval: Ing. Jan Vimmr, Ph.D.) Soustavy těles Soustava těles je seskupení nejméně tří těles (členů) včetně základního rámu spojených vzájemně kinematickými
Podklady k 1. cvičení z předmětu KME / MECH2 (zpracoval: Ing. Jan Vimmr, Ph.D.) Soustavy těles Soustava těles je seskupení nejméně tří těles (členů) včetně základního rámu spojených vzájemně kinematickými
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Témata k závěrečným učňovským zkouškám pro školní rok 2012 2013 Opravář zemědělských strojů
 Střední odborné učiliště opravárenské Králíky Předměstí 427 K R Á L Í K Y Témata k závěrečným učňovským zkouškám pro školní rok 2012 2013 Opravář zemědělských strojů Jen pro vnitřní potřebu školy ing.
Střední odborné učiliště opravárenské Králíky Předměstí 427 K R Á L Í K Y Témata k závěrečným učňovským zkouškám pro školní rok 2012 2013 Opravář zemědělských strojů Jen pro vnitřní potřebu školy ing.
5. Pneumatické pohony
 echatronika 03 - Pneumatika 1 z 6 5. Pneumatické pohony Rozdělení: Mění energii stlačeného vzduchu na pohyb (mechanickou energii) a) válce pro přímé (lineární) pohyby b) pneumotory pro točivý pohyb - pro
echatronika 03 - Pneumatika 1 z 6 5. Pneumatické pohony Rozdělení: Mění energii stlačeného vzduchu na pohyb (mechanickou energii) a) válce pro přímé (lineární) pohyby b) pneumotory pro točivý pohyb - pro
1 VÝTAHY Výtah je strojní zařízeni, které slouží k svislé (někdy i šikmé) dopravě osob nebo nákladu mezi dvěma nebo několika místy.
 dopravě osob nebo nákladu mezi dvěma nebo několika místy.") 1 VÝTAHY Výtah je strojní zařízeni, které slouží k svislé (někdy i šikmé) dopravě osob nebo nákladu mezi dvěma nebo několika místy. Výtahy pracuji přerušovaně nebo plynule. Nastupování osob do výtahů nebo
1 VÝTAHY Výtah je strojní zařízeni, které slouží k svislé (někdy i šikmé) dopravě osob nebo nákladu mezi dvěma nebo několika místy. Výtahy pracuji přerušovaně nebo plynule. Nastupování osob do výtahů nebo
Anotace materiálu zpracovaného v rámci projektu ESF Investice do rozvoje vzdělání
 Anotace materiálu zpracovaného v rámci projektu ESF Investice do rozvoje vzdělání Ing. Petr Kroupa Můj podíl na projektu spočíval ve vypracování materiálu vhodného pro výuku strojních předmětů pomocí interaktivní
Anotace materiálu zpracovaného v rámci projektu ESF Investice do rozvoje vzdělání Ing. Petr Kroupa Můj podíl na projektu spočíval ve vypracování materiálu vhodného pro výuku strojních předmětů pomocí interaktivní
VC-608/ VC-610/711 CNC vertikální obráběcí centrum
 VC-608/ VC-610/711 CNC vertikální obráběcí centrum - Určeno pro přesné obrábění forem a náročných kontur - Vysokorychlostní obrábění 12.000 20.000 ot/min - Ergonomický design a komfortní obsluha - Systém
VC-608/ VC-610/711 CNC vertikální obráběcí centrum - Určeno pro přesné obrábění forem a náročných kontur - Vysokorychlostní obrábění 12.000 20.000 ot/min - Ergonomický design a komfortní obsluha - Systém
III SOKO zemědělské náhradní díly
 skupina - Kasač HORAL Aktiv skupina č. 015 532038120158 2715.01 Hřídel kasače 1 811 Kč 75,00 kg 532030220038 2715.03 Ozubené kolo 84 z. 5 615 Kč 32,00 kg 532038240028 2715.12 Hřídel pravý 1 158 Kč 3,80
skupina - Kasač HORAL Aktiv skupina č. 015 532038120158 2715.01 Hřídel kasače 1 811 Kč 75,00 kg 532030220038 2715.03 Ozubené kolo 84 z. 5 615 Kč 32,00 kg 532038240028 2715.12 Hřídel pravý 1 158 Kč 3,80
11 Manipulace s drobnými objekty
 11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
Návrh manipulátoru portálového typu s podtlakovou uchopovací hlavicí. Bc. Jiří Gergel
 Návrh manipulátoru portálového typu s podtlakovou uchopovací hlavicí Bc. Jiří Gergel Diplomová práce 2013 ABSTRAKT Diplomová práce se zabývá konstrukcí portálového manipulátoru s podtlakovou uchopovací
Návrh manipulátoru portálového typu s podtlakovou uchopovací hlavicí Bc. Jiří Gergel Diplomová práce 2013 ABSTRAKT Diplomová práce se zabývá konstrukcí portálového manipulátoru s podtlakovou uchopovací
Rozpad dílů. rotační kypřič K-60
 Rozpad dílů rotační kypřič K-60 Hlava válce 1 380020070-0001 šroub s límcem 4 2 120230083-0001 víčko ventilové 1 3 120250032-0001 těsnění ventilového víčka 1 4 270960014-0001 svíčka zapalovací F7TC 1 5
Rozpad dílů rotační kypřič K-60 Hlava válce 1 380020070-0001 šroub s límcem 4 2 120230083-0001 víčko ventilové 1 3 120250032-0001 těsnění ventilového víčka 1 4 270960014-0001 svíčka zapalovací F7TC 1 5
TOS Hostivař s.r.o. UBB 50
 UBB 50 Specifikace řady strojů UBB 50 CNC Stroj UBB 50 CNC vychází z univerzální hrotové brusky UB 50 CNC, Jedná se o brusky na kulato pro obrobky maximálního průměru 500 mm a maximální délky 3 000 mm.
UBB 50 Specifikace řady strojů UBB 50 CNC Stroj UBB 50 CNC vychází z univerzální hrotové brusky UB 50 CNC, Jedná se o brusky na kulato pro obrobky maximálního průměru 500 mm a maximální délky 3 000 mm.
VY_32_INOVACE_C 08 19. hřídele na kinetickou a tlakovou energii kapaliny. Poháněny bývají nejčastěji elektromotorem.
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
Rotační pohyb kinematika a dynamika
 Rotační pohyb kinematika a dynamika Výkon pro rotaci P = M k. ω úhlová rychlost ω = π. n / 30 [ s -1 ] frekvence otáčení n [ min -1 ] výkon P [ W ] pro stanovení krouticího momentu M k = 9550. P / n P
Rotační pohyb kinematika a dynamika Výkon pro rotaci P = M k. ω úhlová rychlost ω = π. n / 30 [ s -1 ] frekvence otáčení n [ min -1 ] výkon P [ W ] pro stanovení krouticího momentu M k = 9550. P / n P
VENTILOVÉ ROZVODY ÚCEL
 VENTILOVÉ ROZVODY ÚCEL uskutečnění výměny obsahu válce (spaliny nahradit čerstvou palivovou směsí nebo vzduchem). DRUHY dnes výhradně u 4-dobých motorů ventily ovládané rozvodem OHC, OHV. ČASOVÁNÍ VENTILŮ
VENTILOVÉ ROZVODY ÚCEL uskutečnění výměny obsahu válce (spaliny nahradit čerstvou palivovou směsí nebo vzduchem). DRUHY dnes výhradně u 4-dobých motorů ventily ovládané rozvodem OHC, OHV. ČASOVÁNÍ VENTILŮ
TOS Čelákovice Slovácké strojírny, a.s. Stankovského 1892 250 88 Čelákovice Česká republika
 ČELÁKOVICE GPS: 50 9'49.66"N; 14 44'29.05"E TOS Čelákovice Slovácké strojírny, a.s. Stankovského 1892 250 88 Čelákovice Česká republika Tel.: +420 283 006 229 Tel.: +420 283 006 217 Fax: +420 283 006 226
ČELÁKOVICE GPS: 50 9'49.66"N; 14 44'29.05"E TOS Čelákovice Slovácké strojírny, a.s. Stankovského 1892 250 88 Čelákovice Česká republika Tel.: +420 283 006 229 Tel.: +420 283 006 217 Fax: +420 283 006 226
1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ. 3. Právní předpisy
 1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
PŘEVODNÁ A PŘEVODOVÁ ÚSTROJÍ
 46 PŘEVODNÁ A PŘEVODOVÁ ÚSTROJÍ Převodná a převodová ústrojí 47 Spojky Jsou součástí převodných ústrojí umístěných mezi motorem a převodovkou. Spojka přenáší točivý moment a umožňuje jeho přerušení pro:
46 PŘEVODNÁ A PŘEVODOVÁ ÚSTROJÍ Převodná a převodová ústrojí 47 Spojky Jsou součástí převodných ústrojí umístěných mezi motorem a převodovkou. Spojka přenáší točivý moment a umožňuje jeho přerušení pro:
Pohony šicích strojů
 Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Témata profilové maturitní zkoušky z předmětu Stavba a provoz strojů
 ta profilové maturitní zkoušky z předmětu Stavba a provoz strojů 1. Šroubové spoje 2. Čepové a kolíkové spoje 3. Spoje pery, klíny a drážkové spoje 4. Lisované a svěrné spoje 5. Svarové a pájené spoje
ta profilové maturitní zkoušky z předmětu Stavba a provoz strojů 1. Šroubové spoje 2. Čepové a kolíkové spoje 3. Spoje pery, klíny a drážkové spoje 4. Lisované a svěrné spoje 5. Svarové a pájené spoje
K obrábění součástí malých a středních rozměrů.
 FRÉZKY Podle polohy vřetena rozeznáváme frézky : vodorovné, svislé. Podle účelu a konstrukce rozeznáváme frézky : konzolové, stolové, rovinné, speciální (frézky na ozubeni, kopírovací frézky atd.). Poznámka
FRÉZKY Podle polohy vřetena rozeznáváme frézky : vodorovné, svislé. Podle účelu a konstrukce rozeznáváme frézky : konzolové, stolové, rovinné, speciální (frézky na ozubeni, kopírovací frézky atd.). Poznámka
Témata profilové maturitní zkoušky Technologie
 ta profilové maturitní zkoušky Technologie 1. Technické materiály 2. Vlastnosti a zkoušky technických materiálů 3. Metalografie ocelí a litin 4. Tepelné zpracování a chemicko-tepelné zpracování 5. Odlévání
ta profilové maturitní zkoušky Technologie 1. Technické materiály 2. Vlastnosti a zkoušky technických materiálů 3. Metalografie ocelí a litin 4. Tepelné zpracování a chemicko-tepelné zpracování 5. Odlévání
BDR 581 SL. ROTAČNÍ SEKAČKA BDR 581SL BELLA 1/2011 od roku 2011. Vladimír Bernklau
 BDR 581 SL ROTAČNÍ SEKAČKA BDR 581SL BELLA 1/2011 od roku 2011 Vladimír Bernklau Motor, úchyt motoru 12 11 1 9946914 MOTOR HONDA GCV160, 5,5 HP 4T OHC1Z 1 2 4051913 ŘEMENICE MOTORU 1 3 9463709 PŘÍRUBA
BDR 581 SL ROTAČNÍ SEKAČKA BDR 581SL BELLA 1/2011 od roku 2011 Vladimír Bernklau Motor, úchyt motoru 12 11 1 9946914 MOTOR HONDA GCV160, 5,5 HP 4T OHC1Z 1 2 4051913 ŘEMENICE MOTORU 1 3 9463709 PŘÍRUBA
Průmyslové a automobilové komponenty
 Průmyslové a automobilové komponenty Na dalších stránkách představujeme produkci BECO pro automobilový a průmyslový sektor, pro které budou dostupné speciální katalogy. Současná produkce komponent BECO
Průmyslové a automobilové komponenty Na dalších stránkách představujeme produkci BECO pro automobilový a průmyslový sektor, pro které budou dostupné speciální katalogy. Současná produkce komponent BECO
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
Obsah DÍL 1. Předmluva 11
 DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Návod pro montáž lineární osy a nosné desky
 Lineární osa Návod pro montáž lineární osy a nosné desky 1. Oboustranná vodící kolejnice se připevní šrouby M8 na nosný profil. 2. Nosná deska s 2 excentrickými a 2 centrickými vodícími rolnami se namontuje
Lineární osa Návod pro montáž lineární osy a nosné desky 1. Oboustranná vodící kolejnice se připevní šrouby M8 na nosný profil. 2. Nosná deska s 2 excentrickými a 2 centrickými vodícími rolnami se namontuje
INOVACE A DOKONALOST CNC VERTIKÁLNÍ OBRÁBĚCÍ CENTRA FVP VMP QMP HV U. www.feeler-cnc.cz
 INOVACE A DOKONALOST CNC VERTIKÁLNÍ OBRÁBĚCÍ CENTRA FVP VMP QMP HV U www.feeler-cnc.cz CNC vertikální obráběcí centra řady FVP FV-1500A FVP-1000A Model FV-1500A má 4 lineární vedení osy Y, ostatní modely
INOVACE A DOKONALOST CNC VERTIKÁLNÍ OBRÁBĚCÍ CENTRA FVP VMP QMP HV U www.feeler-cnc.cz CNC vertikální obráběcí centra řady FVP FV-1500A FVP-1000A Model FV-1500A má 4 lineární vedení osy Y, ostatní modely
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje MODUL 03 - TP ing. Jan Šritr ing. Jan Šritr 2 1 ing.
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje MODUL 03 - TP ing. Jan Šritr ing. Jan Šritr 2 1 ing.
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu zástavby jednotlivých prvků technického zařízení Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu zástavby jednotlivých prvků technického zařízení Autor: Doc. Ing. Josef Formánek, Ph.D.
(lze je rozpojit i za běhu) přenáší pohyb prostřednictvím kapaliny. rozpojovat hřídele za běhu
 přenáší pohyb prostřednictvím kapaliny. rozpojovat hřídele za běhu") zapis_casti_stroju_spojky08/2012 STR Bc 1 z 6 13. Hřídelové spojky Rozdělení: spojují #1 a přenáší mezi nimi otáčivý #2 Schéma zapojení spojky #4 Další funkce spojek vyrovnávají vyosení spojovaných hřídelů
zapis_casti_stroju_spojky08/2012 STR Bc 1 z 6 13. Hřídelové spojky Rozdělení: spojují #1 a přenáší mezi nimi otáčivý #2 Schéma zapojení spojky #4 Další funkce spojek vyrovnávají vyosení spojovaných hřídelů
1 PŘEVODNÁ ÚSTROJÍ... 7 2 MOTORY... 93
 OBSAH 1 PŘEVODNÁ ÚSTROJÍ................................. 7 1.1 Účel převodných ústrojí a jejich částí....................... 7 1.2 Spojky................................................ 10 1.2.1 Druhy
OBSAH 1 PŘEVODNÁ ÚSTROJÍ................................. 7 1.1 Účel převodných ústrojí a jejich částí....................... 7 1.2 Spojky................................................ 10 1.2.1 Druhy
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
Přípravky. - Co nejjednodušší a nejlehčí - Co nejvíce částí přípravku by měli být normalizované => nízká cena - Ţádné ostré hrany
 Přípravky - Pomůcky, které urychlují, usnadňují, umoţňují výrobu Základní funkce přípravků 1) Správné ustavení obrobku ) Jednoduché, pevné a rychlé upnutí obrobku 3) Správné vedení nástroje vzhledem k
Přípravky - Pomůcky, které urychlují, usnadňují, umoţňují výrobu Základní funkce přípravků 1) Správné ustavení obrobku ) Jednoduché, pevné a rychlé upnutí obrobku 3) Správné vedení nástroje vzhledem k
Obr. 1 Převod třecí. Obr. 2 Variátor s osami kolmými
 1 Třecí převody - patří do kontaktních převodů - princip - dva kotouče jsou přitlačeny silou FN - velikost třecí síly je ovlivněna součinitelem tření µ - pro zvýšení součinitele tření třecí se kontaktní
1 Třecí převody - patří do kontaktních převodů - princip - dva kotouče jsou přitlačeny silou FN - velikost třecí síly je ovlivněna součinitelem tření µ - pro zvýšení součinitele tření třecí se kontaktní
PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD
 PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál
PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál
12. Hydraulické ventily
 zapis_hydraulika_y - Strana 1 z 6 12. Hydraulické y Principiálně jsou obdobné pneumatickým, ale jsou #1 (větší tlaky) 12.1. Cestné y ( #2 ) Mění #3 proudění kapaliny a tím směr pohybu pístů ve válcích
zapis_hydraulika_y - Strana 1 z 6 12. Hydraulické y Principiálně jsou obdobné pneumatickým, ale jsou #1 (větší tlaky) 12.1. Cestné y ( #2 ) Mění #3 proudění kapaliny a tím směr pohybu pístů ve válcích
PŘEVODY S OZUBENÝMI KOLY
 PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
Sada Převody Kat. číslo
 Sada Převody Kat. číslo 101.5050 Strana 1 z 24 dynamo převod čelními koly mixér s pohonem převod čelními koly a řemenový převod ruční mixér převod čelními koly soustruh převod čelními koly otočná plošina
Sada Převody Kat. číslo 101.5050 Strana 1 z 24 dynamo převod čelními koly mixér s pohonem převod čelními koly a řemenový převod ruční mixér převod čelními koly soustruh převod čelními koly otočná plošina
17.2. Řetězové převody
 zapis_prevody_retezove,remenove08/2012 STR Cb 1 z 7 17.2. Řetězové převody Schéma řetězového převodu Napínání a tlumení řetězu 1 - #1 řetězové kolo, 2 - #2 řetězové kolo, 3 - #3 část řetězu, 4 - #4 část
zapis_prevody_retezove,remenove08/2012 STR Cb 1 z 7 17.2. Řetězové převody Schéma řetězového převodu Napínání a tlumení řetězu 1 - #1 řetězové kolo, 2 - #2 řetězové kolo, 3 - #3 část řetězu, 4 - #4 část
5. Pneumatické pohony
 zapis_pneumatika_valce - Strana 1 z 8 5. Pneumatické pohony Mění energii stlačeného vzduchu na #1 (mechanickou energii) Rozdělení: a) #2 pro přímé (lineární) pohyby b) #3 pro točivý pohyb - pro šroubování,
zapis_pneumatika_valce - Strana 1 z 8 5. Pneumatické pohony Mění energii stlačeného vzduchu na #1 (mechanickou energii) Rozdělení: a) #2 pro přímé (lineární) pohyby b) #3 pro točivý pohyb - pro šroubování,
Fortschritt E 302. náhradní díly pro mačkač. (E 301) 4,00 kg
 4,00 kg") Orig.číslo Číslo SOKO Název ND / použití u: MOcena Kč/ks Obr. Váha skupina - tabulka č. 02 4131771912 302002.12 Pružina nekompletní skupina - Hnací kolo 1 195 Kč (E 303) 3,00 kg tabulka č. 03 4131771535
Orig.číslo Číslo SOKO Název ND / použití u: MOcena Kč/ks Obr. Váha skupina - tabulka č. 02 4131771912 302002.12 Pružina nekompletní skupina - Hnací kolo 1 195 Kč (E 303) 3,00 kg tabulka č. 03 4131771535