Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
|
|
|
- Hynek Moravec
- před 6 lety
- Počet zobrazení:
Transkript
1 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje. ROBOTICS: Vladimír Smutný Slide 1, Page 1
2 J5 axis Kinematika Terminologie Fore arm J4 axis Elbow block 2/24 Rameno (link) je pevná část robotu. J6 axis Shoulder J1 axis J3 axis Upper arm J2 axis Kloub (joint) je část robotu, která umožňuje řízený nebo volný pohyb dvou ramen, které spojuje. Chapadlo (end effector) je část manipulátoru, sloužící k uchopování nebo namontování dalších nástrojů (svařovací hlavice, stříkací hlavice,...). Base Základna (rám, base) je část manipulátoru, která je pevně spojena se zemí. Kinematická dvojice (kinematic pair) je dvojice ramen spojených kloubem. Kloub může být řízený nebo volně pohyblivý. Řízený kloub má namontován pohon a řídicí systém může měnit jeho polohu. Poloha volně pohyblivého kloubu není řízena pohonem a závisí na poloze ostatních kloubů. ROBOTICS: Vladimír Smutný Slide 2, Page 2



3 Kinematika Terminologie II Kinematický řetězec je množina ramen spojených klouby. Kinematický řetězec může být reprezentován grafem. Uzly grafu představují ramena a hrany predstavují klouby. Mechanismus je kinematický řetězec, jehož jedno rameno je připevněno k zemi. Otevřený kinematický řet. Smíšený kinematický řet., Paralelní manipulátor je řetězec, který může být obsahuje ekvivalentní popsán acyklickým grafem. graf obsahuje smyčku. smyčky. 3/24 ROBOTICS: Vladimír Smutný Slide 3, Page 3
4 Druhy kinematických dvojic Symbol Název má/odnímá DOF sférická 3 / 3 rotační 1 / 5 posuvná 1 / 5 válcová 2 / 4 plochá 3 / 3 V praxi je dávána přednost rotačnímu kloubu, protože jeho realizace je levná, má malé tření a vysokou tuhost. V následujícím výkladu budeme studovat především rotační a posuvné klouby. ROBOTICS: Vladimír Smutný Slide 4, Page 4

5 Typická struktura manipulátoru Pravoúhlá (kartézská) PPP Tuhé těleso v prostoru má 6 stupňů volnosti. Manipulátor, který má umožnit alespoň v omezeném prostoru libovolnou polohu a orientaci tělesa, musí mít nejméně 6 stupňů volnosti. Protože každý další stupeň volnosti manipulátor prodražuje a snižuje jeho tuhost, mají obecné manipulátory právě 6 stupňů volnosti. Klouby, které mají být řízeny a odměřovány, mají většinou právě jeden stupeň volnosti, protože sestrojit řízený kloub se dvěma stupni volnosti je technicky obtížné, rozuměj drahé. Nejčastěji jsou používány posuvný a rotační (otočný) kloub. Pokud má být kooub volný, není problém sestrojit kloub sférický, válcový a podobně. Manipulátory s otevřeným kinematickým řetězcem (sériové) mají samozřejmě všechny klouby řízené a odměřované (proč?). Sériové manipulátory se šesti stupni volnosti, které obsahují jen posuvné a otočné klouby a které mají zajistit obecnou orientaci manipulovaného tělesa, musí mít alespoň 3 klouby otočné. Vysvětlete proč není možné libovolným počtem jen posuvných kloubů otočit tělesem. Většinou první tři klouby (počítáno od rámu) mají velký rozsah pohybu a určují tak tvar a vlastnosti pracovní obálky robotu, poslední tři klouby, nejčastěji otočné, zajišťují orientaci tělesa. Toto nám dává příležitost klasifikovat roboty podle prvních třech kloubů (os) do jednotlivých struktur. Výše uvedený seznam struktur není úplný ani z matematického hlediska ani z hlediska reálných robotů, ale většina robotů má jednu z uvedených struktur. Pořadí kloubů je uvedeno písmeny, např. RPP je rotočníposuvný-posuvný, tedy válcový manipulátor. ROBOTICS: Vladimír Smutný Slide 5, Page 5
 RPP ROBOTICS: Vladimír Smutný")
6 Typická struktura manipulátoru Válcová (cylindrická) RPP ROBOTICS: Vladimír Smutný Slide 6, Page 6


7 Typická struktura manipulátoru Sférická RRP ROBOTICS: Vladimír Smutný Slide 7, Page 7

8 Typická struktura manipulátoru Angulární RRR Angulární roboty mají dobrý poměr mezi objemem pra- covní obálky a rozměry robotu. ROBOTICS: Vladimír Smutný Slide 8, Page 8


9 Typická struktura manipulátoru jeřáby RRP a RRPP ROBOTICS: Vladimír Smutný Slide 9, Page 9


10 Typická struktura manipulátoru SCARA RRRP Animace převzaty z webu Masuda Salimianiho Robot SCARA je zvláště vhodný pro operace nad rovinou, ve které má značný rozsah, a je zpravidla velmi rychlý, protože tři otočné osy nepracují proti gravitaci. ROBOTICS: Vladimír Smutný Slide 10, Page 10



11 Typická struktura manipulátoru Stewartova plošina ROBOTICS: Vladimír Smutný Slide 11, Page 11






12 Převodovky Planetová převodovka Harmonická převodovka Převodovky jsou často pořebné speciálně ve spojení s elektrickými pohony. Planetová převodovka se pro účely robotiky vyznačuje příliš velkou vůlí v převodovce, což při reverzaci chodu například při najíždění na polohy s překmitem značně komplikuje řízení. Vůle v planetové převodovce málokdy bývá pod 2 (zkuste si to přepočítat na chybu polohy při normálně velikém robotu. V robotice se nejčastěji používá harmonická převodovka, která nemá žádnou vůli. Její nevýhodou je cena. Existuje mnoho jiných typů převodovek, důležité je, že v robotice máme požadavek bezvůlového převodu, také snímače polohy jsou často na straně motoru, ne na straně kloubu. ROBOTICS: Vladimír Smutný Slide 18, Page 12

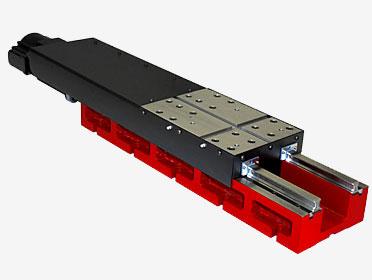


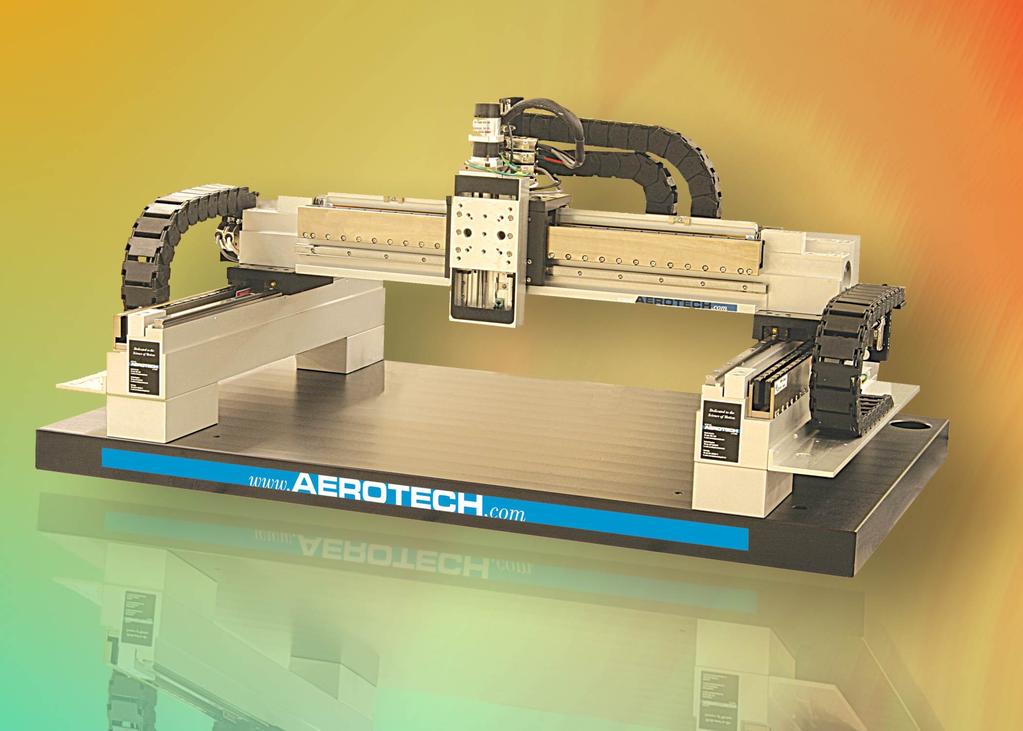
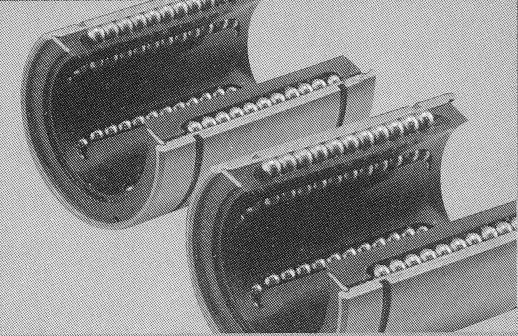
13 Převodovky a vedení Kuličkový šroub Lineární vedení ROBOTICS: Vladimír Smutný Slide 19, Page 13

14 Mobilní roboty - Typy kol ROBOTICS: Vladimír Smutný Slide 20, Page 14

15 Mobilní roboty - švédské kolo ROBOTICS: Vladimír Smutný Slide 21, Page 15

16 Mobilní roboty - poloha mobilního robotu ROBOTICS: Vladimír Smutný Slide 22, Page 16

17 Mobilní roboty - okamžitá poloha středu otáčení ROBOTICS: Vladimír Smutný Slide 23, Page 17

18 Mobilní roboty - běžně používané konstrukce ROBOTICS: Vladimír Smutný Slide 24, Page 18
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
24. Úvod do robotiky Vlastnosti robotů Oblasti použití průmyslových robotů Rozdělení průmyslových robotů. Definice: Robotika
 zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
24. Úvod do robotiky. 24.1. Vlastnosti robotů. 24.2. Oblasti použití průmyslových robotů. 24.3. Rozdělení průmyslových robotů. Definice: Robotika
 oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Kinematika příklad. Robotika. Vladimír Smutný. Centrum strojového vnímání. České vysoké učení technické v Praze
 Kinematika příklad Robotika Kinematika příklad Vladimír Smutný Centrum strojového vnímání České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Příklad praktické úlohy D měřicí stroj
Kinematika příklad Robotika Kinematika příklad Vladimír Smutný Centrum strojového vnímání České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Příklad praktické úlohy D měřicí stroj
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Přímá a inverzní kinematika otevřených kinematických řetězců. Robotika. Přímá a inverzní kinematika otevřených kinematických řetězců.
 Přímá a inverzní kinematika otevřených kinematických řetězců Robotika Přímá a inverzní kinematika otevřených kinematických řetězců Vladimír Smutný Centrum strojového vnímání Český institut informatiky,
Přímá a inverzní kinematika otevřených kinematických řetězců Robotika Přímá a inverzní kinematika otevřených kinematických řetězců Vladimír Smutný Centrum strojového vnímání Český institut informatiky,
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Kinematika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
Mechatronika a robotika jako vědní disciplína
 Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
Obsah. 2 Moment síly Dvojice sil Rozklad sil 4. 6 Rovnováha 5. 7 Kinetická energie tuhého tělesa 6. 8 Jednoduché stroje 8
 Obsah 1 Tuhé těleso 1 2 Moment síly 2 3 Skládání sil 3 3.1 Skládání dvou různoběžných sil................. 3 3.2 Skládání dvou rovnoběžných, různě velkých sil......... 3 3.3 Dvojice sil.............................
Obsah 1 Tuhé těleso 1 2 Moment síly 2 3 Skládání sil 3 3.1 Skládání dvou různoběžných sil................. 3 3.2 Skládání dvou rovnoběžných, různě velkých sil......... 3 3.3 Dvojice sil.............................
VÝROBNÍ STROJE. EduCom. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita v Liberci
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
14.16 Zvláštní typy převodů a převodovek
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Podklady k 1. cvičení z předmětu KME / MECH2
 Podklady k 1. cvičení z předmětu KME / MECH2 (zpracoval: Ing. Jan Vimmr, Ph.D.) Soustavy těles Soustava těles je seskupení nejméně tří těles (členů) včetně základního rámu spojených vzájemně kinematickými
Podklady k 1. cvičení z předmětu KME / MECH2 (zpracoval: Ing. Jan Vimmr, Ph.D.) Soustavy těles Soustava těles je seskupení nejméně tří těles (členů) včetně základního rámu spojených vzájemně kinematickými
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109. Josef Gruber MECHANIKA
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Josef Gruber MECHANIKA SOUBOR PŘÍPRAV PRO 2. R. OBORU 26-41-M/01 ELEKTRO- TECHNIKA - MECHATRONIKA Vytvořeno
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Josef Gruber MECHANIKA SOUBOR PŘÍPRAV PRO 2. R. OBORU 26-41-M/01 ELEKTRO- TECHNIKA - MECHATRONIKA Vytvořeno
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Úvod do průmyslové robotiky. Aleš Pochylý. Co je to robot? Robotizované pracoviště. Znalosti v robotice. Robotický systém
 Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Tematický celek: Jednoduché stroje. Úkol:
 Název: Kladka jako jednoduchý stroj. Tematický celek: Jednoduché stroje. Úkol: 1. Kladka jako jednoduchý stroj. 2. Navrhněte konstrukci robota s pevnou kladkou. 3. Určete, jakou silou působil při zvedání
Název: Kladka jako jednoduchý stroj. Tematický celek: Jednoduché stroje. Úkol: 1. Kladka jako jednoduchý stroj. 2. Navrhněte konstrukci robota s pevnou kladkou. 3. Určete, jakou silou působil při zvedání
1. Stroje se sériovou strukturou (kinematikou) 2. Stroje se smíšenou kinematikou 3. Stroje s paralelní kinematikou
 2. Stroje se smíšenou kinematikou 3. Stroje s paralelní kinematikou") Podle konstrukčního uspořádání a kinematiky 1. Stroje se sériovou strukturou (kinematikou) 2. Stroje se smíšenou kinematikou 3. Stroje s paralelní kinematikou VSZ -1.př. 1 2. Výrobní stroj jako základní
Podle konstrukčního uspořádání a kinematiky 1. Stroje se sériovou strukturou (kinematikou) 2. Stroje se smíšenou kinematikou 3. Stroje s paralelní kinematikou VSZ -1.př. 1 2. Výrobní stroj jako základní
Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM
 MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v
MECHANICKÉ PŘEVODOVKY S KONSTANTNÍM PŘEVODOVÝM POMĚREM Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v
26. Konstrukce robotů Schéma konstrukce robotu
 zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
MECHANIKA TUHÉHO TĚLESA
 MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
ROBOTIKA HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY. (Stacionární roboty) Prof. František Šolc
 Prof. František Šolc") HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ. 3. Právní předpisy
 1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
Kinematika robotických systémů
 Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
1.6 Definice robotů, průmyslových robotů a manipulátorů (PRaM) Aspekty pro posuzováni robotů... 47
 Aspekty pro posuzováni robotů... 47") OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
4 Spojovací a kloubové hřídele
 4 Spojovací a kloubové hřídele Spojovací a kloubové hřídele jsou určeny ke stálému přenosu točivého momentu mezi jednotlivými částmi převodného ústrojí. 4.1 Spojovací hřídele Spojovací hřídele zajišťují
4 Spojovací a kloubové hřídele Spojovací a kloubové hřídele jsou určeny ke stálému přenosu točivého momentu mezi jednotlivými částmi převodného ústrojí. 4.1 Spojovací hřídele Spojovací hřídele zajišťují
Hydraulika ve strojírenství
 Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Inovace robotu BCN3D MOVEO
 Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD
 PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál
PŘEVODY S OZUBENÝMI KOLY KUŽELOVÝMI A ŠROUBOVÝMI PLANETOVÝ PŘEVOD Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ HŘÍDELE A ČEPY
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
26. Konstrukce robotů
 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
Inovace a zkvalitnění výuky prostřednictvím ICT Převody a mechanizmy Vačkové mechanizmy Ing. Magdalena Svobodová Číslo: VY_32_INOVACE_ 15 16 Anotace:
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Inovace a zkvalitnění výuky prostřednictvím ICT Převody a mechanizmy Vačkové mechanizmy Ing. Magdalena
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Inovace a zkvalitnění výuky prostřednictvím ICT Převody a mechanizmy Vačkové mechanizmy Ing. Magdalena
26. Konstrukce robotů
 oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
11 Manipulace s drobnými objekty
 11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky. Základní pojmy
 Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
 Struktura průmyslového RaM (PRaM)") TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
Název zpracovaného celku: Řízení automobilu. 2.natočit kola tak,aby každé z nich opisovalo daný poloměr zatáčení-nejsou natočena stejně
 Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 14.9.2012 Název zpracovaného celku: Řízení automobilu Řízení je nedílnou součástí automobilu a musí zajistit: 1.natočení kol do rejdu změna
Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 14.9.2012 Název zpracovaného celku: Řízení automobilu Řízení je nedílnou součástí automobilu a musí zajistit: 1.natočení kol do rejdu změna
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VÝUKOVÝ MATERIÁL Ing. Yvona Bečičková. Mechanika. Mechanický pohyb. Fyzika 2. ročník, učební obory. Bez příloh. Identifikační údaje školy
 VÝUKOVÝ MATERIÁL Identifikační údaje školy Číslo projektu Název projektu Číslo a název šablony Vyšší odborná škola a Střední škola, Varnsdorf, příspěvková organizace Bratislavská 2166, 407 47 Varnsdorf,
VÝUKOVÝ MATERIÁL Identifikační údaje školy Číslo projektu Název projektu Číslo a název šablony Vyšší odborná škola a Střední škola, Varnsdorf, příspěvková organizace Bratislavská 2166, 407 47 Varnsdorf,
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část:
 Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
15.14 Vačkové mechanismy
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
AUTOMATICKÁ VÝMĚNA NÁSTROJŮ NA OBRÁBĚCÍCH STROJÍCH. Ondřej Tyc
 SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH A DOKTORSKÝCH PRACÍ FST 007 AUTOATICKÁ VÝĚNA NÁSTROJŮ NA OBRÁBĚCÍCH STROJÍCH Ondřej Tyc ABSTRAKT Práce je provedena jako rešerše používaných systémů pro automatickou výměnu
SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH A DOKTORSKÝCH PRACÍ FST 007 AUTOATICKÁ VÝĚNA NÁSTROJŮ NA OBRÁBĚCÍCH STROJÍCH Ondřej Tyc ABSTRAKT Práce je provedena jako rešerše používaných systémů pro automatickou výměnu
Podtlakové úchopné hlavice
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV MIKROELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV MIKROELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II
 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
3D kontaktní skener MicroScribe-3D výukový modul. 3D kontaktní skener MicroScribe-3D Výukový modul
 3D kontaktní skener MicroScribe-3D Výukový modul Kontaktní skener Microscribe-3D MicroScribe je 3D kontaktní flexibilní a cenově dostupný digitizér pro oblast reverzního inženýrství, pro vytváření modelů
3D kontaktní skener MicroScribe-3D Výukový modul Kontaktní skener Microscribe-3D MicroScribe je 3D kontaktní flexibilní a cenově dostupný digitizér pro oblast reverzního inženýrství, pro vytváření modelů
Směrové řízení vozidla. Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D.
 Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Hydrodynamické mechanismy
 Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
PŘEVODY S OZUBENÝMI KOLY
 PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM. www.feeler-cnc.cz
 INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM www.feeler-cnc.cz CNC horizontální obráběcí centra řady FMH FMH-500 (č.40) Rám tvaru T má integrované tříúrovňové vedení s žebrovanou výztuží
INOVACE A DOKONALOST CNC HORIZONTÁLNÍ OBRÁBĚCÍ CENTRA FMH EH FBM www.feeler-cnc.cz CNC horizontální obráběcí centra řady FMH FMH-500 (č.40) Rám tvaru T má integrované tříúrovňové vedení s žebrovanou výztuží
Flexibilní otočné stoly
 Flexibilní otočné stoly 31 Flexibilní otočné stoly Flexibilní otočné stoly Konstrukční prvek pro realizaci flexibilních pohybových úkolů s použitím volně programovatelných servomotorů. Na rozdíl od standardních
Flexibilní otočné stoly 31 Flexibilní otočné stoly Flexibilní otočné stoly Konstrukční prvek pro realizaci flexibilních pohybových úkolů s použitím volně programovatelných servomotorů. Na rozdíl od standardních
ZÁKLADY ROBOTIKY Pohony a věci s tím související
 ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
HLC série. horizontální soustruhy
 HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere
 NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
14.14 Kuželová soukolí
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
LINEÁRNÍ JEDNOTKA S HYDRAULICKÝM POHONEM PRO ROBOT S PARALELNÍ KINEMATICKOU STRUKTUROU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
Modelování sestav. Autodesk INVENTOR. Ing. Richard Strnka, 2012
 Modelování sestav Autodesk INVENTOR Ing. Richard Strnka, 2012 Modelování sestavy přepínače Příprava modelování sestavy Z určeného adresáře překopírujte soubory sestavy 1-4 do vašeho pracovního adresáře.
Modelování sestav Autodesk INVENTOR Ing. Richard Strnka, 2012 Modelování sestavy přepínače Příprava modelování sestavy Z určeného adresáře překopírujte soubory sestavy 1-4 do vašeho pracovního adresáře.
23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) Kladka kladka - F=G, #2 #3
 Kladka kladka - F=G, #2 #3") zapis_dopravni_stroje_jeraby08/2012 STR Fb 1 z 5 23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) #1 Kladka kladka - F=G, #2 #3 kladka - F=G/2
zapis_dopravni_stroje_jeraby08/2012 STR Fb 1 z 5 23. Kladkostroje Použití přenosná zdvihadla pro zvedání zavěšených břemen jednoduchý stroj = kolo s (pro lano) #1 Kladka kladka - F=G, #2 #3 kladka - F=G/2
1 ŘÍZENÍ AUTOMOBILŮ. Z hlediska bezpečnosti silničního provozu stejně důležité jako brzdy.
 1 ŘÍZENÍ AUTOMOBILŮ Z hlediska bezpečnosti silničního provozu stejně důležité jako brzdy. ÚČEL ŘÍZENÍ natočením kol do rejdu udržovat nebo měnit směr jízdy, umožnit rozdílný úhel rejdu rejdových kol při
1 ŘÍZENÍ AUTOMOBILŮ Z hlediska bezpečnosti silničního provozu stejně důležité jako brzdy. ÚČEL ŘÍZENÍ natočením kol do rejdu udržovat nebo měnit směr jízdy, umožnit rozdílný úhel rejdu rejdových kol při
Řezání závitu s konstantním stoupáním (G33, SF)
") Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
JEŘÁBY. Dílenský mobilní hydraulický jeřábek. Sloupový otočný jeřáb. Konzolové jeřáby otočné a pojízdné
 JEŘÁBY Dílenský mobilní hydraulický jeřábek Pro dílny a opravárenské provozy. Rameno zvedáno hydraulicky ručním čerpáním hydraulické kapaliny. Sloupový otočný jeřáb OTOČNÉ RAMENO SLOUP Sloupový jeřáb je
JEŘÁBY Dílenský mobilní hydraulický jeřábek Pro dílny a opravárenské provozy. Rameno zvedáno hydraulicky ručním čerpáním hydraulické kapaliny. Sloupový otočný jeřáb OTOČNÉ RAMENO SLOUP Sloupový jeřáb je
KONSTRUKCE MANIPULÁTORU S PKS PRO VELMI MALÉ SOUČÁSTI
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV VÝROBNÍCH STROJŮ, SYSTÉMŮ A ROBOTIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF PRODUCTION MACHINES,
Průmyslové roboty v praxi
 Průmyslové roboty v praxi Ing. Petr Mráz, Ph.D. Ústav výrobních strojů a mechanismů, Horská 3, Praha 2 tel: 224 35 9192, e-mail: p.mraz@fs.cvut.cz 1. Rozdělení robotů podle kinematiky 2. Sériová versus
Průmyslové roboty v praxi Ing. Petr Mráz, Ph.D. Ústav výrobních strojů a mechanismů, Horská 3, Praha 2 tel: 224 35 9192, e-mail: p.mraz@fs.cvut.cz 1. Rozdělení robotů podle kinematiky 2. Sériová versus
spsks.cz Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU
 Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních
Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních
VY_32_INOVACE_C 08 19. hřídele na kinetickou a tlakovou energii kapaliny. Poháněny bývají nejčastěji elektromotorem.
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
NÁVRH UNIVERZÁLNÍHO ROBOTICKÉHO SYSTÉMU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING