ESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
|
|
|
- Michaela Ševčíková
- před 6 lety
- Počet zobrazení:
Transkript
1 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Chvění asynchronního stroje Bc. Josef Veselý 013
2
3
4 Abstrakt Tato diplomová práce pojednává o chvění asynchronního stroje. Zohledňuje vliv sil působících na statorové jádro. Dále popisuje vliv vlastních frekvencí na konstrukční části stroje a zobrazuje modální analýzu se zobrazením deformací a vlastních tvarů při vlastních frekvencích. Klíčová slova Asynchronní stroj, síla, chvění, analýza, vlastní frekvence, deformace 3
5 Astract This thesis deals with the vibration induction machine. It takes into account the influence of the forces acting on the stator core. It also describes the effect of natural frequencies on the design of the machine and displays a modal analysis showing the deformation and custom shapes with natural frequencies. Key words Induction machine, force, vibration, analysis, natural frequency, deformation 4
6 Prohlášení Prohlašuji, že jsem tuto diplomovou práci vypracoval samostatně, s použitím odborné literatury a pramenů uvedených v seznamu, který je součástí této diplomové práce. Dále prohlašuji, že veškerý software, použitý při řešení této diplomové práce je legální.... podpis V Plzni dne Bc. Josef Veselý 5
7 Poděkování Chtěl bych tímto poděkovat Ing. Lukášovi Bouzkovi za podnětné návrhy stran diplomové práce a za ochotu a trpělivost, se kterou tuto diplomovou práci vedl. 6
8 Obsah Obsah...7 Úvod Síly působící na statorové jádro asynchronního stroje Asynchronní stroj Chvění Elektromagnetické zdroje vibrací Mechanické zdroje vibrací Přeměna energií Radiální síly Model asynchronního stroje Referenční typ motoru D model motoru D model motoru Analýza vlastních frekvencí Deformace statorového jádra Mód vibrací r = Mód vibrací r = Mód vibrací r =, 3, Frekvence a řády magnetických tlaků Jednotlivé části a soubory podrobené analýze Statorové jádro Statorové jádro s vodiči v drážkách Statorové jádro s vodiči v drážkách a čely vinutí Statorové jádro vložené v kostře Statorové jádro s vodiči v drážkách vložené v kostře Statorové jádro s vodiči v drážkách a čely vinutí vložené v kostře Statorové jádro s vodiči v drážkách a čely vinutí vložené v kostře se štíty Vliv konstrukčních částí asynchronního stroje na jeho vlastní frekvence Porovnání...5 Závěr...5 Seznam použité literatury...6 Přílohová část...7 7
9 Úvod Asynchronní stroje, jsou nejpoužívanější stroje v průmyslu. Jsou vyráběny v rozličných škálách velikostí, provedení, výkonů, atd. Pokud nastane v točivém stroji chvění, je pravděpodobné, že pokud se toto chvění zanedbá, může dojít ke zničení stroje nebo zařízení, které je jím poháněno. Řešení chvění, je proto z tohoto důvodu velice důležité. 1. Síly působící na statorové jádro asynchronního stroje 1.1 Asynchronní stroj Asynchronní stroj se skládá ze dvou hlavních částí: statorového a rotorového jádra. Obě mohou být s vícefázovým vinutím. Magnetické obvody rotoru a statoru jsou složeny z tenkých ocelových plechů. Vinutí jsou umístěna ve statorových a rotorových drážkách nebo mohou být vyrobena jako bezdrážková vinutí. Vícefázová statorová vinutí, ve většině případů třífázová vinutí, mají samostatná fázová vinutí, která jsou spojena do hvězdy (Y), nebo do trojúhelníku (D) a jsou připojena na napájení třífázovým proudem. Každá fáze vinutí se skládá z vícezávitových cívek zapojených do série. Cívky zapojené do série lze také seskupit ve dvou nebo více paralelních větvích. Vzduchová mezera mezi statorem a rotorem je velmi malá, obvykle menší než 1 mm pro moderní indukční motory s malým a středním výkonem. Rotorová vinutí mohou být vyrobena jako tři jednofázová vinutí spojená do hvězdy (méně často do trojúhelníku) a vyvedena na svorky, které jsou propojeny na tři sběrací kroužky, nebo jako klecová vinutí složená z axiálních tyčích spojených na koncích rotorovými kruhy. V prvním případ je asynchronní stroj nazýván s vinutou kotvou, nebo kroužkový motor a v druhém případě je nazýván s kotvou nakrátko Princip funkce asynchronního stroje Při napájení statorového vinutí proudem, je ve vzduchové mezeře vytvářeno magnetické točivé pole. Statorové pole indukuje napětí do rotorového vinutí. Rotorovým vinutím poté začne protékat proud, který tvoří rotorové magnetické pole. Vzájemným působením obou polí vzniká elektromagnetický moment. Statorové pole se otáčí synchronní rychlostí: n s = f p [1] kde f je frekvence proudu a p je počet pólpárů. Asynchronní motor má tento název proto, protože rychlost, kterou se otáčí pole statoru, je různá než 8
10 rychlost pole rotoru. Rozdíl mezi rychlostí otáčení rotorového a statorového pole se nazývá skluz: s= ( n s n m ) n s kde n m je mechanická rychlost rotoru. [] 1. Chvění Chvění (vibrace) je omezený vratný pohyb částice z pružného objektu nebo média ve střídavě opačných směrech svého rovnovážného postavení, kdy byla tato rovnováha narušena. Aby došlo k vibraci, musí mít subjekt nebo systém dvě charakteristické vlastnosti: pružnost a hmotnost. Amplituda vibrací je maximální výchylka vibrující částice nebo subjektu z jeho klidové polohy Zdroje chvění v elektrických strojích Frekvence vibrací je obecně v rozmezí 0 až 1000 Hz, a pro hluk nad 1000 Hz. Vibrace a hluk produkované elektrickými stroji lze rozdělit do dvou kategorií: a) Elektromagnetické vibrace spojené s parazitními jevy v důsledku vyšších prostorových a časových harmonických, excentricity, fázové nesymetrie, drážek, magnetického sycení a magnetostrikční expanze jádrových plechů b) mechanické vibrace spojené s mechanickými částmi, zejména vlivem ložisek Elektromagnetické zdroje vibrací Elektromagnetické vibrace jsou způsobeny generováním elektromagnetických polí. Stator i rotor budí magnetickou indukci ve vzduchové mezeře. Pokud stator vytváří magnetickou indukci: = cos (ω t + kα + φ ) [3] Bm1 1 1 a rotor produkuje magnetickou indukci: = cos (ω t + lα + φ ) [4] Bm pak kombinací těchto rovnic vznikne: 0,5 Bm1 Bm cos[(ω1 + ω )t +(k +l) +(φ1 + φ )] + 0,5 B B cos[(ω ω )t +(k l) +(φ φ )] m1 m 1 1 kde B m1 a B m jsou amplitudy magnetické indukce statoru a rotoru, ω 1 a ω jsou úhlové frekvence magnetického pole statoru a rotoru, φ 1 a φ jsou fáze magnetické indukce statoru a rotoru, k = 1,,3,... a l = 1,,3,...Výsledek vyjádřený rovnicí [3] je přímo úměrný magnetické rázové vlně ve vzduchové mezeře s amplitudou: 9 [5]
11 P mr = 0,5 Bm1 Bm úhlovou frekvencí: [6] ω r = ω ± [7] řádem: 1 ω r = k ± l [8] a fází: 1 ± [9] Magnetické napětí, působící v radiálních směrech na aktivním povrchu statoru a rotoru, je příčinou deformace, a tím i vibrací a hluku. Drážky, rozložení vinutí v drážkách, vstupní proud, zkreslení průběhu proudu, kolísání prostupu vzduchovou mezerou, excentricita rotoru, a fázové nesymetrie vedou k mechanické deformaci a vibracím. Magnetomotorická síla prostorových, časových a drážkových harmonických, harmonických excentricity a harmonických sycení, produkují vyšší harmonické síly a momenty. Zvláště radiální síly ve střídavých strojích, které působí na stator i rotor, deformují magnetický obvod. Konstrukce kostry statoru je primárním zářičem vibrací stroje. Je-li frekvence radiální síly blízká nebo rovná některé z přirozených frekvencí kostry statoru, tak nastane rezonance. Ta vede k deformaci statoru a vibracím. V motorech napájených měniči, jsou parazitní oscilační momenty vytvářeny z důvodu vyšších časových harmonických obsažených v proudu vinutí statoru. Tyto parazitní momenty jsou obecně vyšší než oscilační momenty vytvářené prostorovými harmonickými. Navíc zvlněné napětí usměrňovače je přenášeno přes meziobvod do měniče a vytváří jiný druh oscilačního momentu Mechanické zdroje vibrací Mechanické vibrace jsou způsobeny především ložisky a jejich vadami. Dále pak kluznými kontakty, deformací hřídele, nevyvážeností rotoru, nesouosostí hřídele, spojkou, ozubenými koly, atd.. Rotor by měl být přesně vyvážený pro výrazné snížení vibrací. Nevyváženost rotoru způsobuje rotorové vibrace a excentricitu, které vedou ke zvýšení chvění statoru, rotoru a nosné konstrukce rotoru. V elektrických strojích se používají valivá i kluzná ložiska. Chvění vlivem valivých ložisek závisí na přesnosti ložiskových částí, dále pak na mechanické rezonanční frekvenci vnějšího kroužku, rychlosti otáčení, vhodném mazání, toleranci, zarovnání, zatížení, teplotě a přítomnosti cizích materiálů. Vibrace způsobené kluznými ložisky jsou obecně nižší než u valivých ložisek. Vibrace produkované kluznými ložisky závisí na drsnosti povrchu kluzných ploch, mazání, stabilitě a víření olejového filmu v ložisku, procesu výroby, kvalitě a instalaci. 10
12 1.3 Přeměna energií Vstupní proud interaguje s magnetickým polem a jsou produkovány vysokofrekvenční síly, které působí na vnitřním povrchu statorového jádra. Tyto síly vybudí statorové jádro a kostru v příslušném frekvenčním rozsahu a vytváří mechanické vibrace. V důsledku vibrací je povrch statorového jha a rámu vytlačován s frekvencí odpovídající frekvenci síly. Stator a statorový rám je mechanický systém. Je charakterizován hmotností M, tlumením C a tuhostí K. Elektromagnetická síla vybudí mechanický systém pro generování vibrací. Amplituda vibrací je funkce velikosti a frekvence těchto sil. Mechanický systém může být jednoduše popsán jako model se soustředěnými parametry s N stupni volnosti v maticovém tvaru: [M ]{ q}+[ C ]{ q}+[ K ]{q}= {F ( t)} [10] kde q je vektor (N, 1) vyjadřující posunutí o N stupňů volnosti, {F (t)} je vektor síly vztahující se ke stupňům volnosti, [M] je matice hmotnosti, [C] je matice tlumení a [K] je matice tuhosti. Rovnice může být řešena pomocí strukturální metody konečných prvků (FEM). V praxi jsou ale problémy s predikcí [C] maticí pro laminované materiály, fyzikálními vlastnostmi materiálů, a chybami ve výpočtu magnetických sil. 1.4 Radiální síly Vznik radiálních magnetických sil Prostorové a časové rozdělení magnetomotorických sil vícefázového elektrického stroje napájeného sinusovým a vyvážené proudovým systémem můžeme vyjádřit následujícími rovnicemi. pro stator: F 1( α, t )= Fmν cos( p ± ωt ) Pro rotor: ν= 1 μ= 1 [11] F (α, t )= Fmμ cos(μpα ± ω t + ) [1] μ μ Kde α je úhlová vzdálenost od počátku souřadného systému, p je počet pólpárů, φ μ je úhel mezi vektory statoru a rotoru harmonických stejného pořadí, ν a μ jsou počty prostorových harmonických statoru a rotoru v příslušném pořadí, ω = πf je pulsace vstupního proudu a F mν a F mμ jsou maximální hodnoty ν-tých a μ-tých harmonických. pα = πx / τ, kde τ je pólová rozteč a x je lineární vzdálenost od dané osy. Okamžitá hodnota normálové složky magnetické indukce ve vzduchové mezeře v bodě určeném úhlem α lze vypočítat pomocí rovnice: 11
13 b( α, t )= [F ( α, t )+ F ( α,t )] Λg ( α,t )= b 1( α,t )+b( α, t ) 1 [13] kde Λg (α,t) je relativní prostup vzduchovou mezerou závislá na úhlu α. Platí pro stator: ν= 1 b1(a, t)= F 1(, t) Λg (, t)= Bmν cos( p ± ωt) [14] a pro rotor: b (α )= F ( t) Λ (ααt)= t, Fmμ cos(μpα ± ω t + ), [15] g μ= 1 μ Podle Maxwellova napěťového tenzoru, radiální magnetická síla na jednotku plochy nebo magnetický tlak v každém bodě vzduchové mezery je: 1 pr (,t)= [b (, t) bt (, t)] [16] μ 0 Vzhledem k tomu, že magnetická permeabilita feromagnetického jádra je mnohem vyšší, než vzduchové mezery, čáry magnetického toku jsou prakticky kolmé na statorové a rotorové jádro. To znamená, že tečná složka bt (α, t) hustoty magnetického toku je mnohem menší, než normálová složka b (α, t) a platí: b (, t) pr(, t) = μ 1 μ [b (, t)] 0 g 1 μ 0 0 [F (, t)+ F (, t)] + b 1(, t) b(, t)+ [b 1(, t)] μ 1 1 g g μ Λ (, t)= [F (, t) Λ (, t)+ F(, t) F (, t) Λ (, t)+ F (, t) Λ (, t)= K dispozici jsou tři skupiny z nekonečného množství vln radiálních sil: a) [b 1 (α, t)] harmonických statoru se stejným počtem ν, tj. p rν B (, t)= mν cos( p ± ωt) B = μ 4μ 0 mν 0 [ 1+ cos( p ± ωω) b) Kombinace b 1 (α, t) a b (α, t) harmonických statoru ν a rotoru μ p rν Bmν cos( p ± ωt) Bmμ cos( p ± ωμt + μ ) (, t)= = μ0 1 Bmν Bmμcos[ ( p ± ωt) ( p ± ωμt + μ )] μ0 [ ( p ± ωt) ( p ± ω t + )] = μ μ g [17] [18] 1
14 = 1 μ B mν B mμ cos[pα (ν μ)± (ω ω cos[pα (ν+ μ)± (ω+ω μ μ ) t + )] ) t )] 0 [19] c) [b 1 (α, t)] harmonických rotoru se stejným počtem μ μ μ p rνν 1 4μ 0 [B (, t)= B mμ mμ cos( p ± ω t + )] μ [ 1+ cos( p ± ω 0 μ μ μ t + ) μ = [0] Konstanty rovné B mν 4μ 0 a B mμ 4μ 0 v rovnicích 18 a 0 nemají žádný význam pro vibrace a lze je zanedbat, protože statický magnetický tlak je rovnoměrně rozmístěn podél vzduchové mezery. V souladu s rovnicemi a b c magnetické síly na jednotku plochy může být vyjádřena následující obecná rovnice: p (, t)= P cos(rα ω t) [1] r mr r kde P mr je amplituda magnetického tlaku, ωr je úhlová frekvence a r = 0, 1,, 3, je pořadí odpovídající radiálním magnetickým silám. Radiální síly obíhají kolem statoru s úhlovou rychlostí ωr / r a frekvence fr = ωr / (π). Při malém počtu pólpárů statoru mohou radiální síly způsobit jeho vibrace Amplituda magnetického tlaku Amplituda Pmr radiálního magnetického tlaku r-tého řádu závisí na harmonických magnetické indukce, která působí při jeho vzniku. vybuzení statorových harmonických stejného řádu ν P mr = B mν 4μ N/m [] 0 P mr = vybuzení statorových ν a rotorových harmonických μ B mν B μ 0 mμ N/m [3] vybuzení rotorových harmonických stejného řádu μ P mr = B mμ 4μ N/m [4] 0 13
15 Chceme-li získat amplitudu radiální síly, musíme vynásobit amplitudu magnetického tlaku P mr π, D 1in a L i, kde D 1in je vnitřní rozměr statoru a L i je efektivní délka statorového jádra.. Model asynchronního stroje Pro tuto diplomovou práci musel být vytvořen 3D model asynchronního stroje, aby mohla být provedena analýza vlastních frekvencí jednotlivých částí stroje. Model byl vytvářen v programu SolidWorks, který posléze posloužil jako analyzátor vlastních frekvencí stroje. Model byl samozřejmě patřičně zjednodušen, aby bylo možné analýzy provést..1 Referenční typ motoru Jako podklad pro tvorbu modelu byl použit motor SIEMENS 1LA AA10 Štítkové hodnoty: Pn=11kW Un=400/30V In=1.5A Mn=7Nm nn=1460rpm cos fi=0.84 eta=88.5% Izáb=136A Kódování typového čísla: místo: 1LA7-3-fázový asynchronní motor s kotvou nakrátko místo: 16 - osová výška 160mm, 7. místo: 3 - délka kostry (svazku) = střední "M" 8. místo: 4 - počet pólů = 4 9. místo: A - základní provedení, motor s hliníkovou kostrou 10. místo: A - třída rotoru = místo: 1 - D/Y30/400V, 50Hz 1. místo: 0 - tvar = IM B3 14


16 . 3D model motoru.3 D model motoru Obr D model asynchronního motoru V rámci této práce byl vytvořen i D model motoru. Jedná se o statorový a rotorový plech, který byl analyzován pomocí nástroje FEMM. Obr.. - D model asynchronního motoru (magnetický tok) 15
17 3. Analýza vlastních frekvencí 3.1 Deformace statorového jádra Vzhledem k tomu, že obvodové vibrace působí na jádro statoru, průhyb jádra statoru Δd je inverzní funkcí čtvrté mocniny r-tého řádu síly. 1 Δd [5] 4 r Vzhledem k tomu, že součin statorových harmonických stejného počtu ν je podle rovnice XY, je nejnižší frekvence magnetické síly fr = f rovna dvojnásobku kmitočtu sítě a řádu r = p. Protože řád síly r = je pro dvoupólový motor a r = 4 pro čtyřpólový motor, bude magnetická síla u čtyřpólového motoru 1/16 dvoupólového motoru. K největší deformaci jha statoru dochází při frekvenci fr, která je v blízkosti přirozených frekvencí statorového systému. Z hlediska vibrací, jsou nejzajímavější módy r = 0, 1,, 3 a Mód vibrací r = 0 Pro pulsační vibrační mód tzv. dýchání je r = 0. Hustota radiální magnetické síly je rozložena po celém obvodu statoru a mění se periodicky s časem. To způsobuje radiální vibrace jádra statoru. Toto může být srovnáno s válcovou nádobou s proměnným vnitřním přetlakem. p 0 0 = Pmr=0 cos ω t [6] Rovnice popisuje interference dvou vln magnetické indukce o stejných délkách (stejných počtech pólových párů) a různé rychlosti (frekvenci). "Dýchání" mód r = 0 může způsobit nízké vlnové číslo vibrace, a to i s vysokým počtem pólů a sinusovým proudem statoru. Tato situace může nastat, pokud jsou v blízkosti nízkých vlnových čísel, daných vysokou admitancí strukturální nespojitosti Mód vibrací r = 1 Pro mód ohybu nosníku r = 1 radiální tlak vytváří jednostranný magnetický tah na rotor. Úhlová rychlost rotace tahu je ω 1. Fyzicky tato rovnice popisuje interferenci dvou vln magnetické indukce, pro které je počet pólových párů rozdílný o jedničku. p1 mr=1 ω1 = P cos α - t [7] 16
18 3.1.3 Mód vibrací r =, 3, 4 Pro oválový vibrační mód je r = a při r = 3, 4, dojde k deformaci statorového jádra ve vlnovém tvaru. Na obrázku jsou patrné rozměrové deformace vlivem radiálních sil. 3. Frekvence a řády magnetických tlaků Úhlové frekvence a řády radiálního magnetického tlaku vychází z rovnic 18, 19 a 0: vybuzení statorových harmonických stejného řádu ν ω r = ω f r = f r= νp [8] vybuzení statorových ν a rotorových harmonických μ ω r = ω± ω μ f r = f ± f μ r=(ν± μ) p [9] vybuzení rotorových harmonických stejného řádu μ ω r = ω μ f r = f μ r= μp [30] Pro základní prostorové harmonické ν = 1 je frekvence radiálního magnetického tlaku a řád (obvodový vibrační mód) podle vzorce 8. Rotační součásti se dvěma pólpáry a frekvencí f, mohou způsobit značné vibrace. Zejména u velkých strojů s B mν = 1 = 0,8T je velikost radiálního magnetického tlaku roven 17,4 kn/m. I pro vyšší prostorové harmonické ν > 1 platí stále vzorec 8. 17
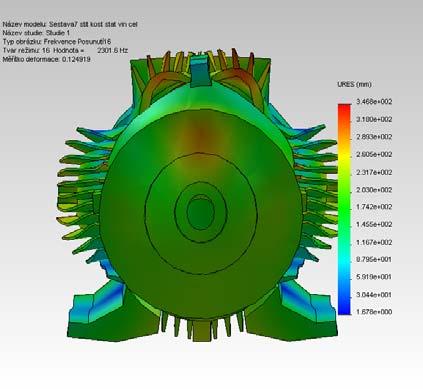
19 3.3 Jednotlivé části a soubory podrobené analýze Jelikož je výčet všech vlastních tvarů a frekvencí nepřeberný, jsou v této části zahrnuty pouze základní tvary analyzovaných prvků. Další tvary a frekvence jsou v příloze Statorové jádro Jako první bylo analýze podrobeno statorové jádro. Obr.4. Deformace pro r= při frekvenci16hz Obr.5. Deformace pro r=3 při frekvenci3,1hz 18
20 Obr.6. Deformace pro r=4 při frekvenci5573,7hz 3.1. Statorové jádro s vodiči v drážkách Jako další byla provedena analýza statorového jádra s vodiči v drážkách. Obr.7. Deformace pro r=při frekvenci 130,6Hz 19
21 Obr.8. Deformace pro r=3 při frekvenci 3385,8Hz Obr.9. Deformace pro r=4 při frekvenci 5887,Hz 0
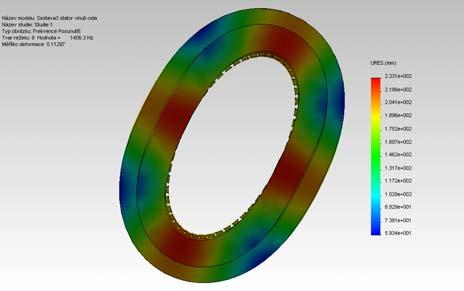
22 3.1.3 Statorové jádro s vodiči v drážkách a čely vinutí Jelikož je vinutí bez čel neúplné, bylo nutné provést analýzu statoru s vinutím se zahrnutím čel vinutí. Obr.10. Deformace pro r=při frekvenci 1405,1Hz Obr.11. Deformace pro r=3 při frekvenci 3616,3Hz 1
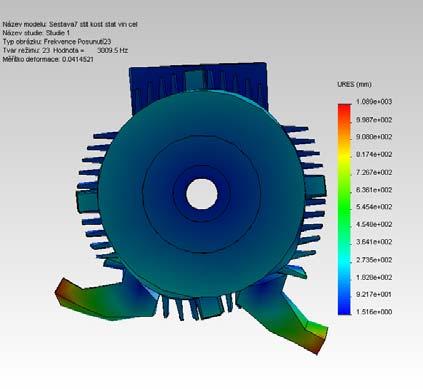
23 Obr.1. Deformace pro r=4 při frekvenci 661,8Hz Statorové jádro vložené v kostře Jako další byl podroben analýze celek statorového paketu v hliníkové kostře. Obr.13. Deformace pro r= při frekvenci 130,8Hz
24 Obr. 14. Deformace pro r=3 při frekvenci 310,4Hz Z obrázků je patrné, že rozpoznat různé druhy deformací je dosti složité. Některé druhy deformací ani v této analýze nebyly obsaženy Statorové jádro s vodiči v drážkách vložené v kostře Obr. 15. Deformace pro r= při frekvenci 143,3Hz 3
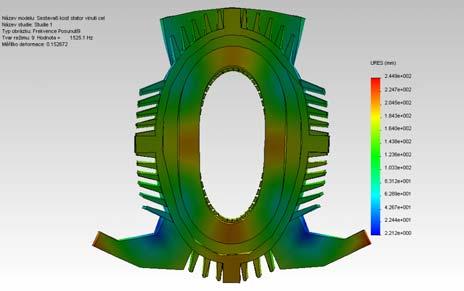
25 Obr. 15. Deformace pro r=3 při frekvenci 3373,7Hz Statorové jádro s vodiči v drážkách a čely vinutí vložené v kostře Obr. 16. Deformace pro r= při frekvenci 1486,7Hz 4
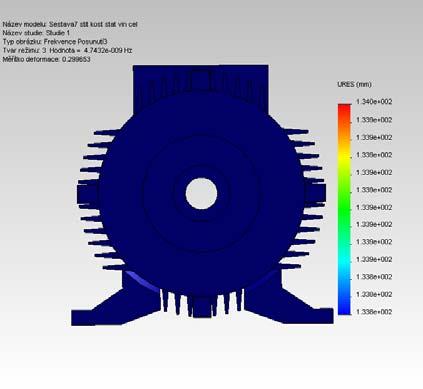
26 Obr. 17. Deformace pro r=3 při frekvenci 3568,8Hz Statorové jádro s vodiči v drážkách a čely vinutí vložené v kostře se štíty Tato analýza byla jako poslední. Vlivem štítů je těžké rozpoznat o jaký tvar se jedná. Výstupy této analýzy jsou v přílohové části jako ostatní analýzy. 4. Vliv konstrukčních částí asynchronního stroje na jeho vlastní frekvence 4.1 Porovnání Z analýz je patrné, že vinutí a čela vinutí ve statorovém paketu zvyšují hodnoty vlastních frekvencí pro různé vlastní tvary. Naopak konstrukce kostry a štítů rozšiřuje celkové množství vlastních frekvencí. Závěr V první části této diplomové práce byl popsán asynchronní stroj a síly, které působí na statorové jádro stroje. Ve druhé části byl zobrazen typ stroje, který byl namodelován a využit pro analýzy vlastních frekvencí konstrukčních částí stroje. V další části byla provedena analýza vlastních frekvencí stroje a v poslední části shrnutí analýz. 5
27 Seznam použité literatury [1] HELLER, B., HAMATA, V. Přídavná pole, síly a ztráty v asynchronním stroji. Praha Nakladatelství Československé akademie věd, 1961 [] GIERAS, J. F., WANG, CH., LAI, J. CH. Noise of polyphase electric motors. CRC Press 006 [3] BARTOŠ, V. Elektrické stroje. Plzeň : ZČU FEL, 006 [4] PETROV, G. N. Elektrické stroje 1. Praha : Academia,

28 Přílohová část Tvary analyzovaných částí při vlastních frekvencích Paket statoru 7
29 8

30 Paket statoru s vinutím 9
31 30

32 Paket statoru s vinutím a čely cívek 31
33 3
34 33
35 Paket statoru v kostře 34
36 35
37 36
38 Paket statoru s vinutím v kostře 37
39 38

40 Paket statoru s vinutím a čely v kostře 39
41 40


42 Paket statoru s vinutím a čely v kostře se štíty 41
43 4
44 43
45 44
ESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Chvění asynchronního stroje Bc. Josef Veselý 2013 Abstrakt Tato diplomová práce pojednává
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Chvění asynchronního stroje Bc. Josef Veselý 2013 Abstrakt Tato diplomová práce pojednává
Asynchronní stroje. Fakulta elektrotechniky a informatiky VŠB TUO. Ing. Tomáš Mlčák, Ph.D. Katedra elektrotechniky.
 Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz/kat452 PEZ I Stýskala, 2002 ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS)
Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz/kat452 PEZ I Stýskala, 2002 ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS)
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Elektrické stroje pro hybridní pohony. Indukční stroje asynchronní motory. Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha
 Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
AS jako asynchronní generátor má Výkonový ýštítek stroje ojedinělé použití, jako typický je použití ve větrných elektrárnách, apod.
 Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz fei.vsb.cz/kat452 TZB III Fakulta stavební Stýskala, 2002 ASYNCHRONNÍ STROJE
Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz fei.vsb.cz/kat452 TZB III Fakulta stavební Stýskala, 2002 ASYNCHRONNÍ STROJE
Základy elektrotechniky
 Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY. 1.1 Vytvoření točivého magnetického pole
 1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
Osnova kurzu. Elektrické stroje 2. Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 3
 Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
FYZIKA II. Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování)
") FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
FYZIKA II Petr Praus 10. Přednáška Elektromagnetické kmity a střídavé proudy (pokračování) Osnova přednášky činitel jakosti, vektorové diagramy v komplexní rovině Sériový RLC obvod - fázový posuv, rezonance
1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17
 Obsah 1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17 3.1 MOŽNOSTI POSUZOVÁNÍ TECHNICKÉHO STAVU ASYNCHRONNÍCH ELEKTROMOTORŮ 23 3.2 ZAČLENĚNÍ
Obsah 1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17 3.1 MOŽNOSTI POSUZOVÁNÍ TECHNICKÉHO STAVU ASYNCHRONNÍCH ELEKTROMOTORŮ 23 3.2 ZAČLENĚNÍ
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje. Pracovní list - příklad vytvořil: Ing.
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Digital Control of Electric Drives. Vektorové řízení asynchronních motorů. České vysoké učení technické Fakulta elektrotechnická
 Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Základní otázky pro teoretickou část zkoušky.
 Základní otázky pro teoretickou část zkoušky. Platí shodně pro prezenční i kombinovanou formu studia. 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2.
Základní otázky pro teoretickou část zkoušky. Platí shodně pro prezenční i kombinovanou formu studia. 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2.
Návrh toroidního generátoru
 1 Návrh toroidního generátoru Ing. Ladislav Kopecký, květen 2018 Toroidním generátorem budeme rozumět buď konstrkukci na obr. 1, kde stator je tvořen toroidním jádrem se dvěma vinutími a jehož rotor tvoří
1 Návrh toroidního generátoru Ing. Ladislav Kopecký, květen 2018 Toroidním generátorem budeme rozumět buď konstrkukci na obr. 1, kde stator je tvořen toroidním jádrem se dvěma vinutími a jehož rotor tvoří
Pohony šicích strojů
 Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
20ZEKT: přednáška č. 10. Elektrické zdroje a stroje: výpočetní příklady
 20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
Laboratorní úloha č. 2 Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon. Max Šauer
 Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
ELEKTRICKÉ STROJE ÚVOD
 ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.17 Integrovaná střední škola technická Mělník, K učilišti 2566,
ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.17 Integrovaná střední škola technická Mělník, K učilišti 2566,
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů.
 Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter
 Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter Prof. Ing. Karel Sokanský, CSc. VŠB TU Ostrava, FEI.Teoretický úvod Z rozboru frekvenčních spekter různých veličin generovaných
Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter Prof. Ing. Karel Sokanský, CSc. VŠB TU Ostrava, FEI.Teoretický úvod Z rozboru frekvenčních spekter různých veličin generovaných
Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Základy elektrotechniky 2 (21ZEL2)
") Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
Základy elektrotechniky 2 (21ZEL2) Přednáška 7-8 Jindřich Sadil Generátory střídavého proudu osnova Indukované napětí vodiče a závitu Mg obvody Úvod do strojů na střídavý proud Synchronní stroje princip,
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Digitální učební materiál
 Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Doc. Ing. Stanislav Kocman, Ph.D , Ostrava
 9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
Elektromagnetický oscilátor
 Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
Elektromagnetický oscilátor Již jsme poznali kmitání mechanického oscilátoru (závaží na pružině) - potenciální energie pružnosti se přeměňuje na kinetickou energii a naopak. T =2 m k Nejjednodušší elektromagnetický
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Pohonné systémy OS. 1.Technické principy 2.Hlavní pohonný systém
 Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Tématické okruhy teoretických zkoušek Part 66 1 Modul 3 Základy elektrotechniky
 Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Tématické okruhy teoretických zkoušek Part 66 1 3.1 Teorie elektronu 1 1 1 Struktura a rozložení elektrických nábojů uvnitř: atomů, molekul, iontů, sloučenin; Molekulární struktura vodičů, polovodičů a
Rozeznáváme tři základní složky vibrací elektrických strojů točivých. Vibrace elektromagnetického původu
 Rozeznáváme tři základní složky vibrací elektrických strojů točivých Vibrace elektromagnetického původu Vibrace mechanického původu Vibrace - hluk ventilačního původu Od roku 1985 pozorují fenomén negativního
Rozeznáváme tři základní složky vibrací elektrických strojů točivých Vibrace elektromagnetického původu Vibrace mechanického původu Vibrace - hluk ventilačního původu Od roku 1985 pozorují fenomén negativního
Určeno pro posluchače bakalářských studijních programů FS
 SYNCHRONNÍ STROJE Určeno pro posluchače bakalářských studijních programů FS Obsah Význam a použití 1. Konstrukce synchronních strojů 2. Princip činnosti synchronního generátoru 3. Paralelní chod synchronního
SYNCHRONNÍ STROJE Určeno pro posluchače bakalářských studijních programů FS Obsah Význam a použití 1. Konstrukce synchronních strojů 2. Princip činnosti synchronního generátoru 3. Paralelní chod synchronního
princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,
, paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,") 1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1. Regulace otáček asynchronního motoru - skalární řízení
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
doc. Dr. Ing. Elias TOMEH
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Analýza spekter vibrací Amplituda vibrací x, v, a 1) Kinematické schéma, vibrací - n, z1,z2..,typy VL, - průměr řemenic. 2) Výběr
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Analýza spekter vibrací Amplituda vibrací x, v, a 1) Kinematické schéma, vibrací - n, z1,z2..,typy VL, - průměr řemenic. 2) Výběr
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ HŘÍDELE A ČEPY
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1.Hřídele a čepy HŘÍDELE A ČEPY Hřídele jsou základní strojní součástí válcovitého tvaru, která slouží k
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
u = = B. l = B. l. v [V; T, m, m. s -1 ]
![u = = B. l = B. l. v [V; T, m, m. s -1 ]](/thumbs/51/28180013.jpg "u = = B. l = B. l. v [V; T, m, m. s -1 ]") 5. Elektromagnetická indukce je děj, kdy ve vodiči, který se pohybuje v magnetickém poli a protíná magnetické, indukční čáry, vzniká elektrické napětí. Vodič se stává zdrojem a je to nejrozšířenější způsob
5. Elektromagnetická indukce je děj, kdy ve vodiči, který se pohybuje v magnetickém poli a protíná magnetické, indukční čáry, vzniká elektrické napětí. Vodič se stává zdrojem a je to nejrozšířenější způsob
Řešení: Nejdříve musíme určit sílu, kterou působí kladka proti směru pohybu padajícího vědra a napíná tak lano. Moment síly otáčení kladky je:
 Přijímací zkouška na navazující magisterské studium - 16 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Jak dlouho bude padat
Přijímací zkouška na navazující magisterské studium - 16 Studijní program Fyzika - všechny obory kromě Učitelství fyziky-matematiky pro střední školy, Varianta A Příklad 1 (5 bodů) Jak dlouho bude padat
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
19. Elektromagnetická indukce
 19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
19. Elektromagnetická indukce Nestacionární magnetické pole časově proměnné. Existuje kolem nehybných vodičů s proměnným proudem, kolem pohybujících se vodičů s konstantním nebo proměnným proudem nebo
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
TRANSFORMÁTORY Ing. Eva Navrátilová
 STŘEDNÍ ŠOLA, HAVÍŘOV-ŠUMBAR, SÝOROVA 1/613 příspěvková organizace TRANSFORMÁTORY Ing. Eva Navrátilová - 1 - Transformátor jednofázový = netočivý elektrický stroj, který využívá elektromagnetickou indukci
STŘEDNÍ ŠOLA, HAVÍŘOV-ŠUMBAR, SÝOROVA 1/613 příspěvková organizace TRANSFORMÁTORY Ing. Eva Navrátilová - 1 - Transformátor jednofázový = netočivý elektrický stroj, který využívá elektromagnetickou indukci
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 1. Základní informace o této fyzikální veličině Symbol vlastní indukčnosti je L, základní jednotka henry, symbol
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 1. Základní informace o této fyzikální veličině Symbol vlastní indukčnosti je L, základní jednotka henry, symbol
Energetická bilance elektrických strojů
 Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY)
 STROJE (MOTORY)") ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY) Indukční (asynchronní) stroj je točivý elektrický stroj, jehož magnetický obvod je malou mezerou rozdělen na dvě části: stator a rotor. Obě části jsou opatřeny vinutím.
ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY) Indukční (asynchronní) stroj je točivý elektrický stroj, jehož magnetický obvod je malou mezerou rozdělen na dvě části: stator a rotor. Obě části jsou opatřeny vinutím.
Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod):
:") 1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod): a. Mohou pracovat na částech elektrických zařízení nn bez napětí, v blízkosti nekrytých pod napětím ve vzdálenosti větší než 1m s dohledem, na částech
1. Pracovníci poučení dle 4 Vyhlášky 50/1978 (1bod): a. Mohou pracovat na částech elektrických zařízení nn bez napětí, v blízkosti nekrytých pod napětím ve vzdálenosti větší než 1m s dohledem, na částech
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Elektrický výkon v obvodu se střídavým proudem. Účinnost, účinník, činný a jalový proud
 Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
Elektrický výkon v obvodu se střídavým proudem Účinnost, účinník, činný a jalový proud U obvodu s odporem je U a I ve fázi. Za předpokladu, že se rovnají hodnoty U,I : 1. U(efektivní)= U(stejnosměrnému)
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Spínaný reluktanční motor s magnety ve statoru
 - 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
- 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
Transformátor trojfázový
 Transformátor trojfázový distribuční transformátory přenášejí elektricky výkon ve všech 3 fázích v praxi lze použít: a) 3 jednofázové transformátory větší spotřeba materiálu v záloze stačí jeden transformátor
Transformátor trojfázový distribuční transformátory přenášejí elektricky výkon ve všech 3 fázích v praxi lze použít: a) 3 jednofázové transformátory větší spotřeba materiálu v záloze stačí jeden transformátor
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor Elektrické stroje
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Příloha č. 1. amplitudová charakteristika filtru fázová charakteristika filtru / frekvence / Hz. 1. Určení proudové hustoty
 Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY.
 STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Vznik trojfázového napětí Průběh naznačený na obrázku je jednofázový,
STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Vznik trojfázového napětí Průběh naznačený na obrázku je jednofázový,
c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky
 vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky") Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
Harmonický kmitavý pohyb a) vysvětlení harmonického kmitavého pohybu b) zápis vztahu pro okamžitou výchylku c) vysvětlení jednotlivých veličin ve vztahu pro okamžitou výchylku, jejich jednotky d) perioda
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ. Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Momenty asynchronních strojů Luděk Marek 2017 Abstrakt Předkládaná bakalářská
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Momenty asynchronních strojů Luděk Marek 2017 Abstrakt Předkládaná bakalářská
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Rezonanční elektromotor II
 - 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
- 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ Bc. Karel Hrnčiřík
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Bc. Karel Hrnčiřík Magnetické pole je kolem vodiče s proudem. Magnetka se natáčí ve směru tečny ke kruhové
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Bc. Karel Hrnčiřík Magnetické pole je kolem vodiče s proudem. Magnetka se natáčí ve směru tečny ke kruhové
Výukový materiál zpracovaný v rámci operačního programu Vzdělávání pro konkurenceschopnost
 Výukový materiál zpracovaný v rámci operačního programu Vzdělávání pro konkurenceschopnost Registrační číslo: CZ.1.07/1. 5.00/34.0084 Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada:
Výukový materiál zpracovaný v rámci operačního programu Vzdělávání pro konkurenceschopnost Registrační číslo: CZ.1.07/1. 5.00/34.0084 Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada:
SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE
 B1M15PPE") SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE USPOŘÁDÁNÍ SYNCHRONNÍHO STROJE Stator: Trojfázové vinutí po 120 Sinusové rozložení v drážkách Připojení na trojfázovou síť Rotor: Budicí vinutí napájené
SYNCHRONNÍ STROJE (Synchronous Machines) B1M15PPE USPOŘÁDÁNÍ SYNCHRONNÍHO STROJE Stator: Trojfázové vinutí po 120 Sinusové rozložení v drážkách Připojení na trojfázovou síť Rotor: Budicí vinutí napájené
21. Výroba, rozvod a užití elektrické energie
 21. Výroba, rozvod a užití elektrické energie a) Výroba střídavého proudu (trojfázový generátor střídavého proudu, třífázová soustava napětí, spotřebitelská elektrická rozvodná síť, různé typy elektráren)
21. Výroba, rozvod a užití elektrické energie a) Výroba střídavého proudu (trojfázový generátor střídavého proudu, třífázová soustava napětí, spotřebitelská elektrická rozvodná síť, různé typy elektráren)
Transformátory. Teorie - přehled
 Transformátory Teorie - přehled Transformátory...... jsou elektrické stroje, které mění napětí při přenosu elektrické energie při stejné frekvenci. Používají se především při rozvodu elektrické energie.
Transformátory Teorie - přehled Transformátory...... jsou elektrické stroje, které mění napětí při přenosu elektrické energie při stejné frekvenci. Používají se především při rozvodu elektrické energie.
Elektrické výkonové členy Synchronní stroje
 Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektromagnetické pole je generováno elektrickými náboji a jejich pohybem. Je-li zdroj charakterizován nábojovou hustotou ( r r
 Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Základní otázky ke zkoušce A2B17EPV. České vysoké učení technické v Praze ID Fakulta elektrotechnická
 Základní otázky ke zkoušce A2B17EPV Materiál z přednášky dne 10/5/2010 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2. Coulombův zákon, orientace vektorů
Základní otázky ke zkoušce A2B17EPV Materiál z přednášky dne 10/5/2010 1. Síla současně působící na elektrický náboj v elektrickém a magnetickém poli (Lorentzova síla) 2. Coulombův zákon, orientace vektorů
ELEKTROMAGNETICKÉ POLE
 ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
1.1. Základní pojmy 1.2. Jednoduché obvody se střídavým proudem
 Praktické příklady z Elektrotechniky. Střídavé obvody.. Základní pojmy.. Jednoduché obvody se střídavým proudem Příklad : Stanovte napětí na ideálním kondenzátoru s kapacitou 0 µf, kterým prochází proud
Praktické příklady z Elektrotechniky. Střídavé obvody.. Základní pojmy.. Jednoduché obvody se střídavým proudem Příklad : Stanovte napětí na ideálním kondenzátoru s kapacitou 0 µf, kterým prochází proud
21ZEL2 Transformátory
 1ZEL Transformátory Jan Zelenka ČVUT Fakulta dopravní Praha 019 1 Úvod co je transformátor? je netočivý elektrický stroj umožňuje přenášet elektrickou energii mezi obvody pomocí vzájemné magnetické indukce
1ZEL Transformátory Jan Zelenka ČVUT Fakulta dopravní Praha 019 1 Úvod co je transformátor? je netočivý elektrický stroj umožňuje přenášet elektrickou energii mezi obvody pomocí vzájemné magnetické indukce
Metody provozní diagnostiky elektrických strojů.
 Metody provozní diagnostiky elektrických strojů. Petr BERNAT VŠB - Technická univerzita Ostrava, Fakulta elektrotechniky a informatiky, Katedra elektrických strojů a přístrojů, ul. 17. Listopadu 15, 708
Metody provozní diagnostiky elektrických strojů. Petr BERNAT VŠB - Technická univerzita Ostrava, Fakulta elektrotechniky a informatiky, Katedra elektrických strojů a přístrojů, ul. 17. Listopadu 15, 708
Synchronní stroje 1FC4
 Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - TU Ostrava 8. TRANSFORMÁTORY
 Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - T Ostrava 8. TRANSFORMÁTORY 8. Princip činnosti 8. Provozní stavy skutečného transformátoru 8.. Transformátor naprázdno 8.. Transformátor
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - T Ostrava 8. TRANSFORMÁTORY 8. Princip činnosti 8. Provozní stavy skutečného transformátoru 8.. Transformátor naprázdno 8.. Transformátor
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
MĚŘENÍ Laboratorní cvičení z měření Měření vlastní a vzájemné indukčnosti část Teoretický rozbor
 MĚŘENÍ Laboratorní cvičení z měření část 3-1-1 Teoretický rozbor Výukový materiál Číslo projektu: CZ.1.07/1.5.00/34.0093 Šablona: III/ Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 0 Číslo materiálu:
MĚŘENÍ Laboratorní cvičení z měření část 3-1-1 Teoretický rozbor Výukový materiál Číslo projektu: CZ.1.07/1.5.00/34.0093 Šablona: III/ Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 0 Číslo materiálu:
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 25. 3. 2014
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 25. 3. 2014
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU Autoři textu: Ing. Ondřej Vítek, Ph.D. Květen 2013 epower Inovace výuky elektroenergetiky
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU Autoři textu: Ing. Ondřej Vítek, Ph.D. Květen 2013 epower Inovace výuky elektroenergetiky
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, transformátory a jejich vlastnosti
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, transformátory a jejich vlastnosti Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, transformátory a jejich vlastnosti Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová
Ele 1 RLC v sérií a paralelně, rezonance, trojfázová soustava, trojfázové točivé pole, rozdělení elektrických strojů
 Předmět: očník: Vytvořil: Datum: ELEKTOTECHNIKA PVNÍ ZDENĚK KOVAL Název zpracovaného celku: 3. 0. 03 Ele LC v sérií a paralelně, rezonance, trojfázová soustava, trojfázové točivé pole, rozdělení elektrických
Předmět: očník: Vytvořil: Datum: ELEKTOTECHNIKA PVNÍ ZDENĚK KOVAL Název zpracovaného celku: 3. 0. 03 Ele LC v sérií a paralelně, rezonance, trojfázová soustava, trojfázové točivé pole, rozdělení elektrických
TWG II. CAG Electric Machinery. Trojfázové synchronní generátory v bezkartáčovém provedení. Úvod: Hlavní ukazatele: Požadavky na prostředí:
 CAG Electric Machinery TWG II Trojfázové synchronní generátory v bezkartáčovém provedení. Úvod: Sériové trojfázové synchronní generátory TWG II v bezkartáčovém provedení byly vyvinuty na základě rozvoje
CAG Electric Machinery TWG II Trojfázové synchronní generátory v bezkartáčovém provedení. Úvod: Sériové trojfázové synchronní generátory TWG II v bezkartáčovém provedení byly vyvinuty na základě rozvoje
Skripta. Školní rok : 2005 / 2006 ASYNCHRONNÍ MOTORY
 INTEGROVANÁ STŘEDNÍ ŠKOLA Jméno žáka: CENTRUM ODBORNÉ PŘÍPRAVY 757 01 Valašské Meziříčí, Palackého49 Třída: Skripta Školní rok : 2005 / 2006 Modul: elementární modul: ELEKTRICKÉ STROJE skripta 9 ASYNCHRONNÍ
INTEGROVANÁ STŘEDNÍ ŠKOLA Jméno žáka: CENTRUM ODBORNÉ PŘÍPRAVY 757 01 Valašské Meziříčí, Palackého49 Třída: Skripta Školní rok : 2005 / 2006 Modul: elementární modul: ELEKTRICKÉ STROJE skripta 9 ASYNCHRONNÍ