Soubory modelu v AFPD
|
|
|
- Přemysl Malý
- před 6 lety
- Počet zobrazení:
Transkript
1 Soubory modelu v AFPD V tomto dokumentu se pokusím vysvětlit, co jaký soubor v adresáři jednotlivých modelů, v našem případě modelu Antares, znamená. Když otevřeme adresář Antares (..\AeroFly Professional Deluxe\aircraft\Antares\ ), najdeme tam tyto soubory: Antares.tgo Antares.tmg Antares.tmd Antares-C1.tmt Antares-C2.tmt thumb.tmt preview-antares.tmt preview-antares.txt Aby jste měli možnost porovnávat jednotlivé postupy, můžete si stáhnout kompletního Antarese se všemi zdrojovými soubory. Antares.tgo Tento soubor vznikne konverzí zdrojového souboru programu Metasequoia pomoci utility mqo_to_afp.exe. Jak jsem již psal v části Stručný postup, díky tomuto prográmku zkonvertujeme soubor z formátu Antares.mqo do formátu, kterému AFPD rozumí. Konverzí vzniknou tři soubory: Antares.obj (textový soubor) Antares.tgo (binární soubor) tm.log Soubor Antares.tgo zkopírujeme do adresáře Antares, který vytvoříme ve složce aircraft simulátoru. Nic jiného se s ním dělat nedá. Soubor Antares.tgo je výchozí soubor, ve kterém jsou uloženy veškeré údaje celého modelu velikost jednotlivých částí, souřadnice polygonů, namapování textur a další. Soubor Antares.obj je textový soubor, kde můžete vidět jednotlivé objekty, souřadnice polygonů a další. V podstatě vás nemusí zajímat. Příkaz pro konverzi je v našem případě následující: mqo_to_afp.exe Antares Antares jméno modelu, které vychází z názvu uloženého v programu Metasequoia faktor měřítka Toto měřítko je platné pro velikost Antarese v Metasequoia. Když stavíte model, je jedno v jakém měřítku, ale před konverzí ho upravte na velikost, jaká je na obrázku. Nezkoušel jsem a myslím, že je i zbytečné vymýšlet jiné varianty. Nejjednodušší je udělat si pomocný objekt plocha o velikosti rozpětí a délky modelu a porovnat s modelem. 1


2 Pro takovou velikost potom platí měřítko při konverzi. Soubor tm.log je obyčejný textový soubor, ve kterém je záznam o činnosti konverze. Po otevření v textovém editoru můžeme zkontrolovat, jestli se při konverzi nevyskytly chyby. Pokud získáte podobný výsledek, je vše v pořádku. 2
3 mqo2afp: // mqo2afp: // aerofly professional mqo file converter mqo2afp: // mqo2afp: // copyright (c) ipacs gbr all rights reserved mqo2afp: // mqo2afp: // mqo2afp: // you are not allowed to distribute this software mqo2afp: // except with the written permission of ipacs mqo2afp: // mqo2afp: // the software is provided "as is", without warranty of any mqo2afp: // kind, express or implied, including but not limited to the mqo2afp: // warranties of merchantability, fitness for a particular mqo2afp: // purpose and noninfringement of third party rights. in no mqo2afp: // event shall the copyright holder or holders included in this mqo2afp: // notice be liable for any claim, or any special indirect or mqo2afp: // consequential damages, or any damages whatsoever resulting mqo2afp: // from loss of use, data or profits, whether in an action of mqo2afp: // contract, negligence or other tortious action, arising out of mqo2afp: // or in connection with the use or performance of this software. mqo2afp: // mqo2afp: mqo2afp: 0: "Antares-C1" (1.00,1.00,1.00) (t=antares-c1.bmp) mqo2afp: 1: "Antares-C2" (1.00,1.00,1.00) (t=antares-c2.bmp) mqo2afp: 2: "Glass" (1.00,1.00,1.00) (t=antares-c1.bmp) mqo2afp: 3: "Metal" (1.00,1.00,1.00) (t=antares-c2.bmp) mqo2afp: 4: "Rubber" (1.00,1.00,1.00) (t=antares-c2.bmp) mqo2afp: (smooth) (FusTail) (ch= ) (v= ) (dgn= ) (t= ) (ts=73) mqo2afp: (smooth) (Fuselage) (ch= ) (v= ) (dgn= ) (t= ) (ts=50) mqo2afp: (smooth) (FusCaseIn) (ch= ) (v= ) (dgn= ) (t= ) (ts=88) mqo2afp: (smooth) (Cockpit) (ch=70 125) (v= ) (dgn= ) (t= ) (ts=51) mqo2afp: (smooth) (CockpitUp) (ch=98 180) (v= ) (dgn= ) (t= ) (ts=17) mqo2afp: (smooth) (Canopy) (ch= ) (v= ) (dgn= ) (t= ) (ts=7) mqo2afp: (smooth) (GSpring) (ch= ) (v= ) (dgn= ) (t= ) (ts=248) mqo2afp: (smooth) (GFixture) (ch=11 10) (v= ) (dgn=72 72) (t=72 72) (ts=63) mqo2afp: (smooth) (LeftWing) (ch=49 77) (v= ) (dgn= ) (t= ) (ts=16) mqo2afp: (smooth) (LeftEnd) (ch= ) (v= ) (dgn= ) (t= ) (ts=13) mqo2afp: (smooth) (LeftAileron) (ch=13 22) (v=66 34) (dgn=22 22) (t=22 22) (ts=6) mqo2afp: (smooth) (RightWing) (ch=49 77) (v= ) (dgn= ) (t= ) (ts=14) mqo2afp: (smooth) (RightEnd) (ch= ) (v= ) (dgn= ) (t= ) (ts=8) mqo2afp: (smooth) (RightAileron) (ch=13 22) (v=66 34) (dgn=22 22) (t=22 22) (ts=6) mqo2afp: (smooth) (Stabilizer) (ch=24 31) (v= ) (dgn= ) (t= ) (ts=12) mqo2afp: (smooth) (StabilizerUp) (ch= ) (v= ) (dgn= ) (t= ) (ts=21) mqo2afp: (smooth) (Rudder) (ch=24 38) (v=138 62) (dgn=46 46) (t=46 46) (ts=8) mqo2afp: (smooth) (LeftStabilizer) (ch=18 16) (v= ) (dgn= ) (t= ) (ts=15) mqo2afp: (smooth) (LeftElevator) (ch=10 15) (v=48 30) (dgn=16 16) (t=16 16) (ts=7) mqo2afp: (smooth) (RightStabilizer) (ch=18 16) (v= ) (dgn= ) (t= ) (ts=14) mqo2afp: (smooth) (RightElevator) (ch=10 15) (v=48 48) (dgn=16 16) (t=16 16) (ts=16) mqo2afp: (smooth) (LeftGear) (ch=54 92) (v= ) (dgn= ) (t= ) (ts=15) mqo2afp: (smooth) (LGear) (ch=26 45) (v= ) (dgn= ) (t= ) (ts=17) mqo2afp: (smooth) (LGSF) (ch= ) (v= ) (dgn= ) (t= ) (ts=22) mqo2afp: (smooth) (LeftWheel) (ch= ) (v= ) (dgn= ) (t= ) (ts=71) mqo2afp: (smooth) (RightGear) (ch=54 92) (v= ) (dgn= ) (t= ) (ts=18) mqo2afp: (smooth) (RGear) (ch=26 45) (v= ) (dgn= ) (t= ) (ts=27) mqo2afp: (smooth) (RGSF) (ch= ) (v= ) (dgn= ) (t= ) (ts=32) mqo2afp: (smooth) (RightWheel) (ch= ) (v= ) (dgn= ) (t= ) (ts=61) mqo2afp: (smooth) (TailGear) (ch=85 166) (v= ) (dgn= ) (t= ) (ts=26) mqo2afp: (smooth) (TailSpring) (ch= ) (v= ) (dgn= ) (t= ) (ts=934) mqo2afp: (smooth) (TailWheel) (ch= ) (v= ) (dgn= ) (t= ) (ts=468) mqo2afp: (smooth) (Engine) (ch=26 15) (v= ) (dgn=52 52) (t=52 52) (ts=52) mqo2afp: (smooth) (Motor) (ch= ) (v= ) (dgn= ) (t= ) (ts=270) mqo2afp: (smooth) (MotPS) (ch=48 90) (v= ) (dgn= ) (t= ) (ts=197) mqo2afp: (smooth) (Carburetter) (ch=40 59) (v= ) (dgn= ) (t= ) (ts=195) mqo2afp: (smooth) (Silencer) (ch= ) (v= ) (dgn= ) (t= ) (ts=35) mqo2afp: (smooth) (Propeller) (ch= ) (v= ) (dgn= ) (t= ) (ts=9) mqo2afp: (smooth) (Blade1) (ch= ) (v= ) (dgn= ) (t= ) (ts=19) mqo2afp: (smooth) (Blade2) (ch= ) (v= ) (dgn= ) (t= ) (ts=19) mqo2afp: saving 40 geometries and 5 materials mqo2afp: mqo2afp: press enter to close Windows 3
, znamená to, že jste k jednomu objektu přiřadili dva materiály. Náprava je jednoduchá, protože vidíte, u kterého objektu došlo k chybě.")
4 První část, tj. položky 0: - 4: jsou materiály, které jsem při stavbě Antarese vytvořil, zbytek tvoří jednotlivé části modelu. Pokud byste někdy v souboru tm.log našli u nějakého objektu navíc číslo 01, jako u (FusTail01), znamená to, že jste k jednomu objektu přiřadili dva materiály. Náprava je jednoduchá, protože vidíte, u kterého objektu došlo k chybě. mqo2afp: (smooth) (FusTail) (ch= ) (v= ) (dgn= ) (t= ) (ts=83) mqo2afp: (FusTail01) (ch=4 4) (v=6 4) (dgn=2 2) (t=2 2) (ts=1) mqo2afp: (smooth) (Fuselage) (ch= ) (v= ) (dgn= ) (t= ) (ts=50) Antares.tmg Struktura souboru tmg není složitá. Vychází se stejného principu jako stromová struktura souborů v souborovém manažeru. Jediný rozdíl je, že na kořenový adresář se váže jen jedna úroveň podadresářů. Nejlépe to znázorňuje tento příklad: Fuselage (trup) FusTail (zadní část trup) Canopy (kabina) FusCaseIn (vnitřní část motorového krytu) Cockpit (kabina) CockpitUp (vrch kabiny) GFixture (úchyt pružiny podvozkové vzpěry) GSpring (pružina podvozkové vzpěry) Z tohoto příkladu je patrné, že k části nazvané Fuselage se váží další, které se z hlediska logiky vázat mají a simulátor je bude chápat jako jeden celek. Další skupinou může být: LeftWing (levé křídlo) LeftAileron (levé křidélko) LeftEnd (levý konec křídla) Skupiny modelu jsou libovolné, ale hlavní skupiny jako trup, levé křídlo, pravé křídlo, směrovka, výškovka podvozek a kolečka zůstávají zachovány u většiny modelů. Také zachování anglických názvů doporučuji, zejména u hlavních částí modelu. Samozřejmě, že kabinu můžete 4
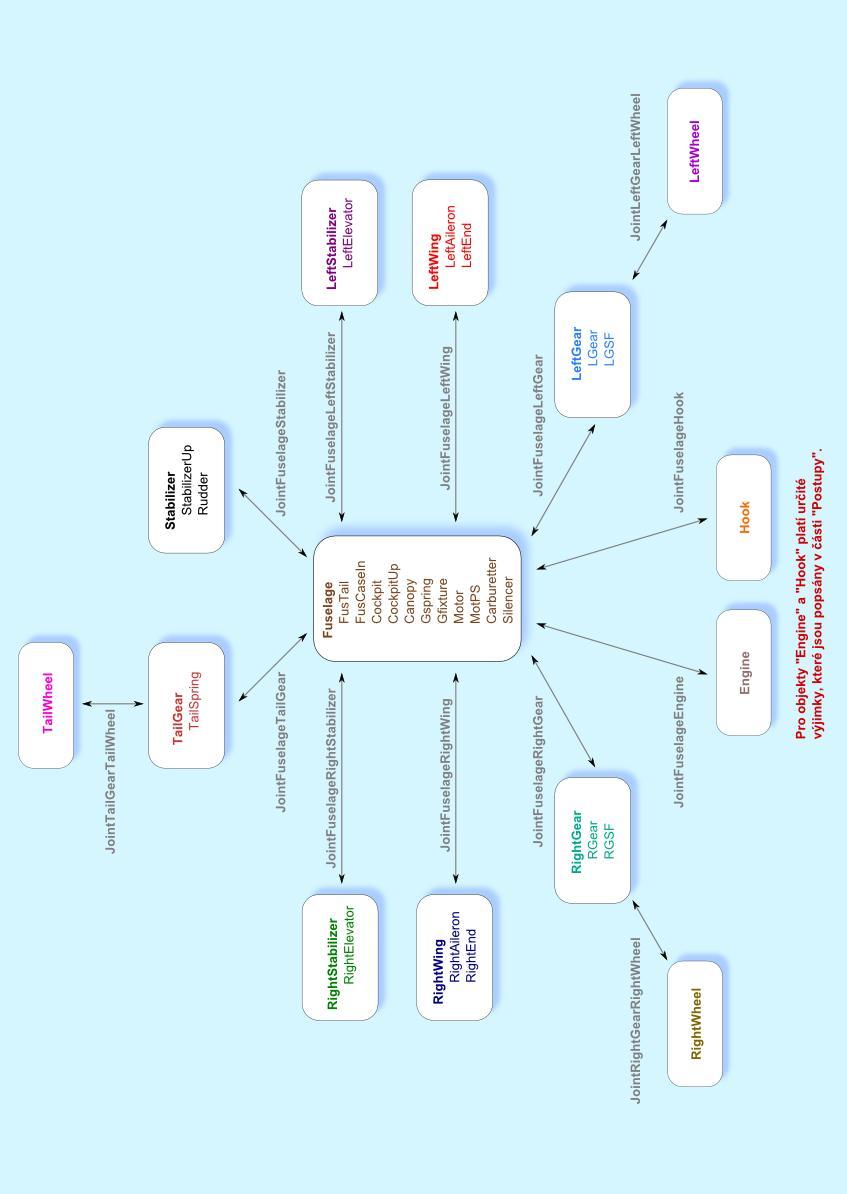
5 nechat kabinou, anténu anténou, pružinu pružinou apod. ovšem bez diakritiky. Na obrázcích jsem jednotlivé skupiny modelu barevně rozlišil. A takto vypadá část samotného souboru Antares.tmg : Jeden objekt Append tmgeometricobject LeftWheel cd LeftWheel/ Geometry( "aircraft/antares/antares.obj", "LeftWheel" ) Shiny = 0.00 Skupina objektů Append tmgeometricobject LeftWing cd LeftWing/ Geometry( "aircraft/antares/antares.obj", "LeftWing" ) Append tmgeometricobject LeftAileron cd LeftAileron/ Geometry( "aircraft/antares/antares.obj", "LeftAileron" ) Append tmgeometricobject LeftEnd cd LeftEnd/ Geometry( "aircraft/antares/antares.obj", "LeftEnd" ) Je zřejmé, že jeden objekt nebo skupinu objektů řídí umístění syntaxe "". U skupiny, kde je hlavní objekt "LeftWing" se syntaxe "" tohoto objektu zařadila až na konec a tím svou skupinu uzavírá. Toto jsou jediné dvě varianty zápisu v souboru tmg. Pokud by jste ukončili skupinu např. třemi syntaxemi nebo pouze jednou, je to už špatně. Mrkněte na soubory jiných modelů všude je to stejné. Také jste si asi všimli položky Shiny = Rozsah této položky je zpravidla od 0.00 do 1.00 a udává úroveň lesku objektu. Obvykle se zadávají čtvrtinové hodnoty 0.00, 0.25, 0.50, 1.00, protože rozdíl mezi hodnotou 0.25 a 0.30 neuvidíte. Čím vyšší hodnota, tím vyšší lesk. Pokud tam tato položka není, je to stejné, jako kdyby tam byla hodnota Shiny = Ve výjimečných případech, většinou při použití odlesku chrómu, se zadává Shiny = Rozdíl úrovně lesku nejlépe uvidíte, když si vyberete libovolný model v simulátoru a nastavíte rozdílné hodnoty Shiny pro levé a pravé křídlo. 5


6 Pro lepší orientaci jsem vytvořil následující obrázky jednotlivých skupin a jejich vzájemný vztah. 6
7 7

8 Antares.tmd Dostáváme se k nejsložitějšímu souboru na úpravu. Celkem právem, protože napoprvé jde z těch údajů hlava kolem. Ale jenom do té doby než se naučíte, které údaje jsou pro stavbu modelu do simulátoru doopravdy důležité. Z grafického schématu jednotlivých skupin vidíme, že je musíme k sobě nějakým způsobem spojit. Od toho je tady soubor Antares.tmd (..\AeroFly Professional Deluxe\aircraft\Antares\ ), který obsahuje souřadnice spojovacích bodů a parametry jednotlivých částí modelu. Nejdříve určíme a zadáme do tabulky souřadnice spojovacích bodů (tabulku Antares_joints.xls najdete v downloadu Antarese v úvodu tohoto dokumentu). Otevřeme si kromě tabulky soubor Antares.mqo. Pozor, než začnete, zkontrolujte si, jestli počátek souřadnic není příliš mimo model, protože po konverzi tvoří těžiště. Nejlepší je vybrat celý model a posunout těžiště do blízkosti počátku souřadnic. V modelovém editoru jsou omezené limity, které umožňují měnit polohu těžiště. Začneme levým křídlem "LeftWing". Vše kromě aktuálního objektu "LeftWing" vypneme. Je na to příkaz "Další" "Zobrazit pouze aktuální" na panelu "Objekty". Aktivujeme příkaz "Posun" a v dialogovém panelu přepneme na "Abs" (absolutní souřadnice). Na křídle vybereme bod, který se nachází asi v první třetině od náběžné hrany. Hodnoty píšeme do levé části tabulky. Automaticky se nám mění hodnoty v pravé části tabulky, které jsou pro nás výchozí. Není to životně důležité, ale myslím, že je lepší mít spojovací bod co nejblíže ke střední křivce profilu. Na závěr vysvětlím proč. Vybereme tedy nejnižší bod profilu křídla V této chvíli nás, ale zajímá pouze hodnota na ose "Y = 9,31". Předchozí hodnota na této ose byla Y = 12,66". Součtem těchto hodnot a následným dělením dvěma získáme poloviční vzdálenost mezi těmito body "Y = 10,98", kterou zapíšeme do tabulky. V tabulce jsem přidal pro tento výpočet jednoduchý vzoreček. 8


9 Pokračujeme získáním souřadnic směrovky "Stabilizer". Tady jenom automaticky zapíšeme nulovou hodnotu osy "X", protože střed směrovky je přesně v nulové pozici. 9

10 Následují souřadnice levé části výškového kormidla "LeftStabilizer". Střed objektu získáme stejným způsobem jako u křídla. Nezapomeňte zapsat výsledek "Y = -0.5" do tabulky. 10


11 Nyní souřadnice levého podvozku "LeftGear". Levé kolečko LeftWheel. 11


12 Ostruhový podvozek TailGear. A jako poslední ostruhové kolečko "TailWheel". 12


13 Jistě jste si všimli, že v tabulce máme pouze skupinu např. LeftStabilizer. Souřadnice pro skupinu RightStabilizer nemá smysl zapisovat, protože budou stejné jako u skupiny LeftStabilizer. Jediným rozdílem je znaménko mínus u souřadnice X. Z obrázku je to myslím jasné. Tak a teď vysvětlím, proč jsme hledali body středu profilu křídla a výškovky. Tyto body nejsou jen body určující místo spojení s trupem, ale jsou to i řídící body, podle kterých se bude křídlo nebo výškovka natáčet při změně úhlu náběhu nebo vzepětí v modelovém editoru. U výškovky Antarese by to až tak nutné nebylo, protože ji tvoří tenká plocha. Jiné modely jako např. Extra 260 mají výškovku tvořenou souměrným profilem a tam by už natáčení těchto částí bylo asymetrické. Dalo by se říci, že vše, co se má nějakém způsobem hýbat, musí být samostatný objekt nebo skupina se spojovacím bodem. Je to tak, ale v rámci níže uvedených výjimek nám tvůrci AFPD ulehčili práci: Stabilizer (kýlová plocha) Rudder (směrové kormidlo) LeftStabilizer (levý stabilizátor) LeftElevator (levé výškové kormidlo) RightStabilizer (pravý stabilizátor) RightElevator (pravé výškové kormidlo) LeftWing (levé křídlo) LeftAileron (levé křidélko) LeftFlap (levá vztlaková klapka) LeftAirbrake (levá brzdící klapka) RightWing (pravé křídlo) RightAileron (pravé křidélko) RightFlap (pravá vztlaková klapka) RightAirbrake (pravá brzdící klapka) Jak sami vidíte, tyto hlavní objekty tvoří skupiny a měly by se chovat jako jeden celek. Přesto budou části Rudder, LeftElevator, RightElevator, LeftAileron, LeftFlap, LeftAirbrake, RightAileron, RightFlap, RightAirbrake pohyblivé, aniž bychom jim museli zadávat spojovací body. Je to celkem logické, protože většina letadel vychází se stejného principu ovládání. V souboru Antares.tmd můžete vidět, kam se tyto konkrétní objekty umísťují. 13

14 Obsah souboru "Antares.tmd" si můžete prohlednout v na závěr tohoto dokumentu.. Tento soubor je určen pouze pro získání přehledu, kam zapsat získané souřadnice spojovacích bodů. V části Postupy najdete podrobný popis jednotlivých parametrů souboru tmd. Jenom zopakuji, že soubory tmg a tmd nevytváříte od samého začátku, místo toho si najdete model, který se vašemu nejvíce podobá, a použijete tyto. Je ovšem nutné přejmenovat název a případně části modelu ve všech položkách. Pozor na zápis jednotlivých objektů. Je rozdíl, jestli napíšete LeftStabilizer a Leftstabilizer. Objekty v souborech tmg a tmd musí mít naprosto identické názvy! Soubory tmt Tyto soubory jsou zkonvertované textury určené pro zbarvení modelu. Jsou zmíněné v části Stručný postup. Když u modelu necháte originální textury ve formátu bmp tak, jak jsou např. u Antarese, nic se nestane, vše bude fungovat. preview-antares.txt Obyčejný textový soubor s popisem modelu, který se zobrazuje pod vybraným modelem v simulátoru. 14
15 Příloha: Obsah souboru Antares.tmd // aerofly professional // // file: Antares.tmd // version: // // type: 17 // lock: 0 // // Append tmdjoint00 JointFuselageStabilizer Append tmdjoint00 JointFuselageLeftStabilizer Append tmdjoint00 JointFuselageRightStabilizer Append tmdjoint00 JointLeftGearLeftWheel Append tmdjoint00 JointRightGearRightWheel Append tmdjoint00 JointTailGearTailWheel Append tmdjoint00 JointFuselageEngine Append tmdjoint00 JointFuselageLeftWing Append tmdjoint00 JointFuselageRightWing Append tmdjoint00 JointFuselageLeftGear Append tmdjoint00 JointFuselageRightGear Append tmdjoint00 JointFuselageTailGear Append tmdfuselage00 Fuselage Append tmdwing00 LeftWing Append tmdwing00 RightWing Append tmdwing11 Stabilizer Append tmdwing10 LeftStabilizer Append tmdwing10 RightStabilizer Append tmdgear00 LeftGear Append tmdwheel00 LeftWheel Append tmdgear00 RightGear Append tmdwheel00 RightWheel Append tmdgear00 TailGear Append tmdwheel00 TailWheel Append tmdengine00 Engine Append tmdpropeller00 Propeller Append tmdservo00 ServoLeftAileron Append tmdservo00 ServoRightAileron Append tmdservo00 ServoRudder Append tmdservo00 ServoElevator Append tmdservo00 ServoThrottle Append tmdreceiver00 Receiver cd JointFuselageStabilizer/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,
16 Body0 =../Fuselage/ Body1 =../Stabilizer/ Kf = 2000 Df = 2 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 10 Dtx = 0.01 Kty = 10 Dty = 0.01 Ktz = 10 Dtz = 0.01 MaxForce = 200 MaxTorque = 1 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageLeftStabilizer/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../Fuselage/ Body1 =../LeftStabilizer/ Kf =
17 Df = 5 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 10 Dtx = 0.01 Kty = 10 Dty = 0.01 Ktz = 10 Dtz = 0.01 MaxForce = 1000 MaxTorque = 4 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageRightStabilizer/ R = tmvector4r( , , , 1 ) U spojení JointFuselageRightStabilizer opíšeme stejné souřadnice jako u spojení JointFuselagLeftStabilizer. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. Body0 =../Fuselage/ Body1 =../RightStabilizer/ Kf = 5000 Df = 5 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 10 Dtx = 0.01 Kty = 10 Dty = 0.01 Ktz = 10 Dtz = 0.01 MaxForce = 1000 MaxTorque = 4 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) 17
18 Displacement = tmvector4r( , , , 0 ) cd JointLeftGearLeftWheel/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../LeftGear/ Body1 =../LeftWheel/ Kf = Df = 100 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 1000 Dtx = 10 Kty = 1000 Dty = 10 Ktz = 1000 Dtz = 10 MaxForce = 0 MaxTorque = 0 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointRightGearRightWheel/ R = tmvector4r( , , , 1 ) U spojení JointRightGearRightWheel opíšeme stejné souřadnice jako u spojení JointRightLeftWheel. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. 18
19 Body0 =../RightGear/ Body1 =../RightWheel/ Kf = Df = 100 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 1000 Dtx = 10 Kty = 1000 Dty = 10 Ktz = 1000 Dtz = 10 MaxForce = 0 MaxTorque = 0 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointTailGearTailWheel/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../TailGear/ Body1 =../TailWheel/ Kf =
20 Df = 100 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 1000 Dtx = 10 Kty = 1000 Dty = 10 Ktz = 1000 Dtz = 10 MaxForce = 0 MaxTorque = 0 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageEngine/ R = tmvector4r( , , , 1 ) U tohoto spojení je výjimka, není nutné zadávat žádné souřadnice spojovacího bodu! Body0 =../Fuselage/ Body1 =../Engine/ Kf = Df = 100 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 1000 Dtx = 10 Kty = 1000 Dty = 10 Ktz = 1000 Dtz = 10 MaxForce = 0 MaxTorque = 0 Rigid = 1 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) 20
21 cd JointFuselageLeftWing/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../Fuselage/ Body1 =../LeftWing/ Kf = Df = 20 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 2000 Dtx = 2 Kty = 2000 Dty = 2 Ktz = 2000 Dtz = 2 MaxForce = 1000 MaxTorque = 100 Rigid = 0 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageRightWing/ R = tmvector4r( , , , 1 ) U spojení JointFuselageRightWing opíšeme stejné souřadnice jako u spojení JointFuselageLeftWing beze změn, protože souřadnice na ose X je v nulové pozici. 21
22 Body0 =../Fuselage/ Body1 =../RightWing/ Kf = Df = 20 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 2000 Dtx = 2 Kty = 2000 Dty = 2 Ktz = 2000 Dtz = 2 MaxForce = 1000 MaxTorque = 100 Rigid = 0 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageLeftGear/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../Fuselage/ Body1 =../LeftGear/ 22
23 Kf = 4000 Df = 15 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 200 Dtx = 0.4 Kty = 200 Dty = 0.4 Ktz = 200 Dtz = 0.4 MaxForce = 800 MaxTorque = 20 Rigid = 0 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) cd JointFuselageRightGear/ R = tmvector4r( , , , 0 ) U spojení JointFuselageRightGear opíšeme stejné souřadnice jako u spojení JointFuselageLeftGear. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. Body0 =../Fuselage/ Body1 =../RightGear/ Kf = 4000 Df = 15 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 200 Dtx = 0.4 Kty = 200 Dty = 0.4 Ktz = 200 Dtz = 0.4 MaxForce = 800 MaxTorque = 20 Rigid = 0 Essential = 1 Angle = 0 AngleZ = 0 Axis = tmvector4r( , , , 0 ) 23
24 Displacement = tmvector4r( , , , 0 ) cd JointFuselageTailGear/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Body0 =../Fuselage/ Body1 =../TailGear/ Kf = 2000 Df = 20 Kfx = 0 Dfx = 0 Kfy = 0 Dfy = 0 Kfz = 0 Dfz = 0 Ktx = 80 Dtx = 0.4 Kty = 80 Dty = 0.4 Ktz = 80 Dtz = 0.4 MaxForce = 0 MaxTorque = 0 Rigid = 0 Essential = 1 Angle = 0.5 AngleZ = 0 Axis = tmvector4r( , , , 0 ) Displacement = tmvector4r( , , , 0 ) Link1 = ~Aircraft/ServoRudder/MechLink cd Fuselage/ R = tmvector4r( , , , 1 ) Geometry( "~Geometry/Fuselage/" ).7 RangeMassMax =
25 Inertia = { , , , , , , , , , , , , , , , } Dv = 0.2 AreaCenter = tmvector4r( , , , 1 ) CG = tmvector4r( , , , 1 ) SmokeNum = 1 SmokeR = tmvector4r( , , , 1 ) SmokeR1 = tmvector4r( , , , 1 ) SmokeR2 = tmvector4r( , , , 1 ) SmokeR3 = tmvector4r( , , , 1 ) Cdx = 0.4 Cly = 1 Cdy = 1 Clz = 1 Cdz = 1 InertiaScale = 0 cd LeftWing/ Sections = 2 RootR = tmvector4f( , , , ) RootN = tmvector4f( , , , ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 PropWashFactor = 0.1 FuselageInterference = 1 Cly = 0.7 RangeSpanMax = 1.1 RangeSpanMin = 0.8 IncidenceOffset = 0 FlapEffect = 1 FlapEffectArea = 0 Aileron = ~Geometry/LeftWing/LeftAileron/ AileronLink = ~Aircraft/ServoLeftAileron/MechLink AileronOffset = tmvector4f( , , , ) FlapDisplacement = tmvector4f( , , , ) Flap1Displacement = tmvector4f( , , , ) AirbrakeDisplacement = 0 AirbrakeCl = 1 AirbrakeCd = 1 // start section 0 SectionR(0) = tmvector4f( , , , ) SectionArea(0) = SectionChord(0) = SectionAirfoil(0) = "PT-40" // start section 1 SectionR(1) = tmvector4f( , , , ) SectionArea(1) = SectionChord(1) = SectionAirfoil(1) = "PT-40" X = tmvector4r( , , , 0 ) Y = tmvector4r( , , , 0 ) 25
26 Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/LeftWing/" ) Inertia = { , , , , , , , , , , , , , , , } Dn = 10 Dv = 0.2 cd RightWing/ Sections = 2 RootR = tmvector4f( , , , ) RootN = tmvector4f( , , , ) U objektu RighWing opíšeme stejné souřadnice jako u objektu LeftWing beze změn, protože souřadnice na ose X je v nulové pozici. PropWashFactor = 0.1 FuselageInterference = 1 Cly = 0.7 RangeSpanMax = 1.1 RangeSpanMin = 0.8 IncidenceOffset = 0 FlapEffect = 1 FlapEffectArea = 0 Aileron = ~Geometry/RightWing/RightAileron/ AileronLink = ~Aircraft/ServoRightAileron/MechLink AileronOffset = tmvector4f( , , , ) FlapDisplacement = tmvector4f( , , , ) Flap1Displacement = tmvector4f( , , , ) AirbrakeDisplacement = 0 AirbrakeCl = 1 AirbrakeCd = 1 // start section 0 SectionR(0) = tmvector4f( , , , ) SectionArea(0) = SectionChord(0) = SectionAirfoil(0) = "PT-40" // start section 1 SectionR(1) = tmvector4f( , , , ) SectionArea(1) = SectionChord(1) = SectionAirfoil(1) = "PT-40" X = tmvector4r( , , , 0 ) Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/RightWing/" ) Inertia = { , , , , , , , , , , , , , , , } Dn = 10 Dv = 0.2 cd Stabilizer/ 26
27 Sections = 1 RootR = tmvector4f( , , , ) RootN = tmvector4f( , , , ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Flap = ~Geometry/Stabilizer/Rudder/ FlapLink = ~Aircraft/ServoRudder/MechLink FlapRotation = 0.8 PropWashFactor = 0.35 Dwf = 0 RangeSpanMax = 0.25 RangeSpanMin = 0.17 // start section 0 SectionR(0) = tmvector4f( , , , ) SectionArea(0) = SectionChord(0) = SectionAirfoil(0) = "FLAT" Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/Stabilizer/" ) Inertia = { , , , , , , , , , , , , , , , } 0 Dn = 40 Dv = 0.2 cd LeftStabilizer/ Sections = 1 RootR = tmvector4f( , , , ) RootN = tmvector4f( , , , ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Flap = ~Geometry/LeftStabilizer/LeftElevator/ FlapLink = ~Aircraft/ServoElevator/MechLink FlapRotation = 0.8 PropWashFactor = 0.4 Dwf = 0 RangeSpanMax =
28 RangeSpanMin = 0.28 // start section 0 SectionR(0) = tmvector4f( , , , ) SectionArea(0) = SectionChord(0) = SectionAirfoil(0) = "FLAT" X = tmvector4r( , , , 0 ) Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/LeftStabilizer/" ) Inertia = { , , , , , , , , , , , , , , , } 0 Dn = 40 Dv = 0.2 cd RightStabilizer/ Sections = 1 RootR = tmvector4f( , , , ) RootN = tmvector4f( , , , ) U objektu RightStabilizer opíšeme stejné souřadnice jako u objektu LeftStabilizer. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. Flap = ~Geometry/RightStabilizer/RightElevator/ FlapLink = ~Aircraft/ServoElevator/MechLink FlapRotation = 0.8 PropWashFactor = 0.4 Dwf = 0 RangeSpanMax = 0.35 RangeSpanMin = 0.28 // start section 0 SectionR(0) = tmvector4f( , , , ) SectionArea(0) = SectionChord(0) = SectionAirfoil(0) = "FLAT" X = tmvector4r( , , , 0 ) Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/RightStabilizer/" ) Inertia = { , , , , , , , , , , , , , , , } 0 Dn = 40 Dv = 0.2 cd LeftGear/ MountingR = tmvector4f( , , , ) MountingZ = tmvector4f( , , , ) 28
29 X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Retractable = 0 RetractZ = tmvector4f( , , , ) RetractAngle = 0 RetractAngleZ = 0 Cdx = 0 Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/LeftGear/" ).1 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 cd LeftWheel/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Geometry( "~Geometry/LeftWheel/" ).05 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 29
30 Kxr = 0.08 Kyr = 0.72 Kr = Dr = 0 Kbrake = 0.4 RotationEnable = 1 cd RightGear/ MountingR = tmvector4f( , , , ) MountingZ = tmvector4f( , , , ) U objektu RightGear opíšeme stejné souřadnice jako u objektu LeftGear. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. Retractable = 0 RetractZ = tmvector4f( , , , ) RetractAngle = 0 RetractAngleZ = 0 Cdx = 0 Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/RightGear/" ).1 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 cd RightWheel/ R = tmvector4r( , , , 1 ) U objektu RightWheel opíšeme stejné souřadnice jako u objektu LeftWheel. Jediným rozdílem je znaménko mínus u souřadnice X = Tento objekt je ve stejné vzdálenosti vzhledem k osám Z a Y, jenom u osy X je sice ve stejné vzdálenosti, ale na opačné straně. Geometry( "~Geometry/RightWheel/" ).05 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 Kxr = 0.08 Kyr = 0.72 Kr = Dr = 0 Kbrake = 0.4 RotationEnable = 1 30
31 cd TailGear/ MountingR = tmvector4f( , , , ) MountingZ = tmvector4f( , , , ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Retractable = 0 RetractZ = tmvector4f( , , , ) RetractAngle = 0 RetractAngleZ = 0 Cdx = 0 Y = tmvector4r( , , , 0 ) Z = tmvector4r( , , , 0 ) R = tmvector4r( , , , 1 ) Geometry( "~Geometry/TailGear/" ).05 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 cd TailWheel/ R = tmvector4r( , , , 1 ) X Y Z Z X Y LeftWing 0 10,98-1,2-0, ,1098 Stabilizer 0 0,33-77,57-0, ,0033 LeftStabilizer 0,97-0,5-76,99-0,7699 0,0097-0,005 LeftGear 5,27-6,08 6,69 0,0669 0,0527-0,0608 LeftWheel 24,62-17,43 7,3 0,073 0,2462-0,1743 TailGear 0-3,76-71,29-0, ,0376 TailWheel 0,8-7,66-75,05-0,7505 0,008-0,0766 Geometry( "~Geometry/TailWheel/" ).1 Inertia = { , , , , , , , , , , , , , , , } Kn = 0 Dn = 0 Dv = 0 Kxr =
32 Kyr = 0.72 Kr = Dr = 0 Kbrake = 0.4 RotationEnable = 1 cd Engine/ R = tmvector4r( , , , 1 ) U tohoto spojení je výjimka, není nutné zadávat žádné souřadnice spojovacího bodu!.5 RangeMassMax = 1.4 Inertia = { , , , , , , , , , , , , , , , } Kn = 4000 Dn = 10 ThrottleControl = ~Aircraft/ServoThrottle/MechLink RotationSpeedIdle = RotationSpeedPowerMax = 0 RotationSpeedMax = PowerMax = 900 PowerMaxRevs = TorqueFactor = 0.2 ExhaustR = tmvector4r( , , , 1 ) ExhaustW = 0 Sound0File = "g " Sound1File = "g " Sound2File = "g " Sound0RPM = 1417 Sound1RPM = 3125 Sound2RPM = 4981 Sound01RPM = 3000 Sound12RPM = 5800 SoundRange = 2000 EngineNumber = 0 FADEC = 0 cd Propeller/ R = tmvector4r( , , , 1 ) Geometry( "~Geometry/Propeller/" ) Inertia = { , , , , , , , , , , , , , , , } Kn = 4000 Dn = 10 Radius = RangeRadiusMax = RangeRadiusMin = Pitch =
33 DragLateral = StopNumber = 0 StopPosition = 0 Folding = FoldingR = tmvector4r( , , , 1 ) Engine = ~Aircraft/Engine/ cd ServoLeftAileron/ SignalIn = ~Aircraft/Receiver/Out(10) P0 = 0 P1 = P2 = 0 P3 = 0 PFirst = 0 Vmax = 10 Vmaxdown = 0 R = tmvector4r( , , , 1 ) cd ServoRightAileron/ SignalIn = ~Aircraft/Receiver/Out(11) P0 = 0 P1 = P2 = 0 P3 = 0 PFirst = 0 Vmax = 10 Vmaxdown = 0 R = tmvector4r( , , , 1 ) cd ServoRudder/ SignalIn = ~Aircraft/Receiver/Out(8) P0 = 0 P1 = P2 = 0 P3 = 0 PFirst = 0 Vmax = 10 Vmaxdown = 0 33
34 R = tmvector4r( , , , 1 ) cd ServoElevator/ SignalIn = ~Aircraft/Receiver/Out(4) P0 = 0 P1 = P2 = 0 P3 = 0 PFirst = 0 Vmax = 10 Vmaxdown = 0 R = tmvector4r( , , , 1 ) cd ServoThrottle/ SignalIn = ~Aircraft/Receiver/Out(0) P0 = 0 P1 = 1 P2 = 0 P3 = 0 PFirst = -1 Vmax = 2 Vmaxdown = 0 R = tmvector4r( , , , 1 ) cd Receiver/ 34
35 R = tmvector4r( , , , 1 ) VTailMixElevator = 0.77 VTailMixRudder = 0.42 MixButterflyAileron = 0 MixButterflyFlap = 0 MixButterflyElevator = 0 MixPowerElevator = 0 MixAileronFlap = 0 MixFlapReduction = 1 35
// aerofly professional -------------------------------------------------------- // // file: Antares.tmd. // // type: 17. hodnota typu modelu:
 // aerofly professional -------------------------------------------------------- // // file: Antares.tmd // version: 1.11.0 verze AFPF podle instalovaného updatu nebo Add Onu // // type: 17 hodnota typu
// aerofly professional -------------------------------------------------------- // // file: Antares.tmd // version: 1.11.0 verze AFPF podle instalovaného updatu nebo Add Onu // // type: 17 hodnota typu
METRA BLANSKO a.s. LLRP PŘEVODNÍK RFI21.1. KOMPAKTNÍ UHF RFID ČTEČKA EU 865 868 MHz US 902 928 MHz. www.metra.cz
 METRA BLANSKO a.s. LLRP PŘEVODNÍK RFI21.1 KOMPAKTNÍ UHF RFID ČTEČKA EU 865 868 MHz US 902 928 MHz www.metra.cz Kompaktní RFID čtečka RFI21.1 OBSAH Aplikace LLRP Converter...3 SW a HW požadavky...3 Spuštění
METRA BLANSKO a.s. LLRP PŘEVODNÍK RFI21.1 KOMPAKTNÍ UHF RFID ČTEČKA EU 865 868 MHz US 902 928 MHz www.metra.cz Kompaktní RFID čtečka RFI21.1 OBSAH Aplikace LLRP Converter...3 SW a HW požadavky...3 Spuštění
Jak dobře vám to myslí?
 Jak dobře vám to myslí? Prosím, vyplňte tento formulá ř perem bez pomoci druhé osoby. Jméno Datum narození / / Jaké je vaše nejvyšší dosažené vzdělání? Jsem muž žena Jsem Asiat černoch Hispánec běloch
Jak dobře vám to myslí? Prosím, vyplňte tento formulá ř perem bez pomoci druhé osoby. Jméno Datum narození / / Jaké je vaše nejvyšší dosažené vzdělání? Jsem muž žena Jsem Asiat černoch Hispánec běloch
Tutorial Pohyblivá zatížení
 Tutorial Pohyblivá zatížení 2 The information contained in this document is subject to modification without prior notice. No part of this document may be reproduced, transmitted or stored in a data retrieval
Tutorial Pohyblivá zatížení 2 The information contained in this document is subject to modification without prior notice. No part of this document may be reproduced, transmitted or stored in a data retrieval
Granit 1280i. Stručný návod k použití. Industrial Full Range Laser Scanner CZ-QS Rev A 1/14
 Granit 1280i Industrial Full Range Laser Scanner Stručný návod k použití 1280-CZ-QS Rev A 1/14 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu
Granit 1280i Industrial Full Range Laser Scanner Stručný návod k použití 1280-CZ-QS Rev A 1/14 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu
Mobilní počítač Dolphin TM 6100. Stručný návod k použití
 Mobilní počítač Dolphin TM 6100 Stručný návod k použití Mobilní počítač Dolphin 6100 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6100 (terminál) Hlavní bateriový
Mobilní počítač Dolphin TM 6100 Stručný návod k použití Mobilní počítač Dolphin 6100 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6100 (terminál) Hlavní bateriový
Rešerše: Kreslení hřídele. v programu CATIA V5
 Rešerše: Kreslení hřídele v programu CATIA V5 CATIA V5 Tento software je určen pro konstruování objemů a ploch. Je hojně využíván v automobilovém a leteckém průmyslu. Je to ideální nástroj nejen pro konstruktéry.
Rešerše: Kreslení hřídele v programu CATIA V5 CATIA V5 Tento software je určen pro konstruování objemů a ploch. Je hojně využíván v automobilovém a leteckém průmyslu. Je to ideální nástroj nejen pro konstruktéry.
Part # Part name Material, dimensions Loose In In bag bag
 Part # Part name Material, dimensions Loose In In bag bag building instruction 01 01 1 fuselage fibreglass 01 01 12 servo tray plywood 4 x x 60 60 x x 64 64 mm mm 01 01 14 tow hook steel 3 mm, mm, washer
Part # Part name Material, dimensions Loose In In bag bag building instruction 01 01 1 fuselage fibreglass 01 01 12 servo tray plywood 4 x x 60 60 x x 64 64 mm mm 01 01 14 tow hook steel 3 mm, mm, washer
Děkujeme Vám za zakoupení stavebnice Z 50 LS
 Děkujeme Vám za zakoupení stavebnice Z 50 LS Vyrábí: ŠAD-MODEL http://www.sad.okdar.net/ Stavebnice rádiem řízeného elektroletu Zlín Z 50LS Model je do značné míry předpracován a jeho dokončení Vám zabere
Děkujeme Vám za zakoupení stavebnice Z 50 LS Vyrábí: ŠAD-MODEL http://www.sad.okdar.net/ Stavebnice rádiem řízeného elektroletu Zlín Z 50LS Model je do značné míry předpracován a jeho dokončení Vám zabere
Part Part name Material, dimensions Loose In bag
 Part Part name Material, dimensions Loose In bag # building instructions 01-1 fuselage fiberglass 01-1-2 servo tray plywood 3 mm 140 x 136 mm - 01 1-21 servo tray gusset plywood 3 mm - 02 1-22 rudder link
Part Part name Material, dimensions Loose In bag # building instructions 01-1 fuselage fiberglass 01-1-2 servo tray plywood 3 mm 140 x 136 mm - 01 1-21 servo tray gusset plywood 3 mm - 02 1-22 rudder link
MDM 1 FOX 02081. Položka Název dílu Materiál, rozměr Volně / ks Balíček/ ks
 MDM 1 FOX 02081 GB - USA Parts list Part Part name Material, dimensions Loose In bag # building instructions 01 - drawing documetation 01-1 fuselage fiberglass 01-1-23 elevator servo tray plywood 4 mm
MDM 1 FOX 02081 GB - USA Parts list Part Part name Material, dimensions Loose In bag # building instructions 01 - drawing documetation 01-1 fuselage fiberglass 01-1-23 elevator servo tray plywood 4 mm
Pravidla ACES
 Pravidla ACES 2009-2010 Dodatek 3.1 měření modelu na příkladech 3.1 Model Měřítko je 1:12. Rozpětí a délka trupu se mohou lišit nejvíce o +/- 5% od rozměru vycházejícího z měřítka. Veškeré ostatní rozměry
Pravidla ACES 2009-2010 Dodatek 3.1 měření modelu na příkladech 3.1 Model Měřítko je 1:12. Rozpětí a délka trupu se mohou lišit nejvíce o +/- 5% od rozměru vycházejícího z měřítka. Veškeré ostatní rozměry
Tutorial Kombinace zatěžovacích stavů
 Tutorial Kombinace zatěžovacích stavů 2 The information contained in this document is subject to modification without prior notice. No part of this document may be reproduced, transmitted or stored in
Tutorial Kombinace zatěžovacích stavů 2 The information contained in this document is subject to modification without prior notice. No part of this document may be reproduced, transmitted or stored in
Učebnice pro modeláře Ing. Ivo Mikač 2008
 Strana 1 Obdélníkové konstrukční křídlo V této lekci se seznámíme s postupem kreslení konstrukčního obdélníkového křídla. Postup je poměrně jednoduchý a bude vám v mnohém připomínat postup při kreslení
Strana 1 Obdélníkové konstrukční křídlo V této lekci se seznámíme s postupem kreslení konstrukčního obdélníkového křídla. Postup je poměrně jednoduchý a bude vám v mnohém připomínat postup při kreslení
Jak na podporu koncových uživatelů SAP Workforce Performance Builder. Roman Bláha Head of Education (Czech Republic) Customer
 Customer") Jak na podporu koncových uživatelů SAP Workforce Performance Builder Roman Bláha Head of Education (Czech Republic) Customer Úsilí Změna je klíčem k inovaci a ovlivňuje firemní řešení Business faktory
Jak na podporu koncových uživatelů SAP Workforce Performance Builder Roman Bláha Head of Education (Czech Republic) Customer Úsilí Změna je klíčem k inovaci a ovlivňuje firemní řešení Business faktory
Granit 1981i. Stručný návod k použití. Průmyslový bezdrátový skener. Crdlss-GRNT1981-CZ-QS Rev A 1/15
 Granit 1981i Průmyslový bezdrátový skener Stručný návod k použití Crdlss-GRNT1981-CZ-QS Rev A 1/15 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu
Granit 1981i Průmyslový bezdrátový skener Stručný návod k použití Crdlss-GRNT1981-CZ-QS Rev A 1/15 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu
Microcat Authorisation Server (MAS ) Uživatelská příručka
 Uživatelská příručka") Microcat Authorisation Server (MAS ) Uživatelská příručka Obsah Úvod... 2 Instalace Microcat Authorisation Server (MAS)... 3 Konfigurace MAS... 4 Licenční přípojka... 4 Opce internetu... 5 Licenční manažer...
Microcat Authorisation Server (MAS ) Uživatelská příručka Obsah Úvod... 2 Instalace Microcat Authorisation Server (MAS)... 3 Konfigurace MAS... 4 Licenční přípojka... 4 Opce internetu... 5 Licenční manažer...
Stáhněte soubory HamCap.zip a itshfbc.exe a instalujte je podle poskytnutých instrukcí. V tomto okamžiku bude Ham CAP pracovat v samostatném módu.
 1 Podpora pro Ham CAP Geoff Anderson G3NPA 1.0 Všeobecně Logger32 může podporovat Ham Cap - software pro predikci podmínek šíření. Kopii této volně šiřitelné aplikace můžete získat z webové stránky Ham
1 Podpora pro Ham CAP Geoff Anderson G3NPA 1.0 Všeobecně Logger32 může podporovat Ham Cap - software pro predikci podmínek šíření. Kopii této volně šiřitelné aplikace můžete získat z webové stránky Ham
Série Voyager 1400g. Stručný návod k použití. Kabelový skener. VG1400-CZ-QS Rev A 10/12
 Série Voyager 1400g Kabelový skener Stručný návod k použití VG1400-CZ-QS Rev A 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete
Série Voyager 1400g Kabelový skener Stručný návod k použití VG1400-CZ-QS Rev A 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete
Lekce 12 Animovaný náhled animace kamer
 Lekce 12 Animovaný náhled animace kamer Časová dotace: 2 vyučovací hodina V poslední lekci tohoto bloku se naučíme jednoduše a přitom velice efektivně animovat. Budeme pracovat pouze s objekty, které jsme
Lekce 12 Animovaný náhled animace kamer Časová dotace: 2 vyučovací hodina V poslední lekci tohoto bloku se naučíme jednoduše a přitom velice efektivně animovat. Budeme pracovat pouze s objekty, které jsme
Doc. Ing. Svatomír Slavík, CSc.. Fakulta strojní - ČVUT v Praze Ústav letadlové techniky
 Letecké konstrukce a materiály Adresa: Karlovo náměstí 13, 121 35, Praha 2 telefon: (+420) 224 357 227 e-mail: Svatomir.Slavik@fs.cvut.cz Doc. Ing. Svatomír Slavík, CSc.. Fakulta strojní - ČVUT v Praze
Letecké konstrukce a materiály Adresa: Karlovo náměstí 13, 121 35, Praha 2 telefon: (+420) 224 357 227 e-mail: Svatomir.Slavik@fs.cvut.cz Doc. Ing. Svatomír Slavík, CSc.. Fakulta strojní - ČVUT v Praze
http://www.sad.okdar.net/modely
 Děkujeme Vám za zakoupení stavebnice termického větroně FLOP - EPP Vyrábí : ŠAD-Model http://www.sad.okdar.net/modely Stavebnice rádiem řízeného elektroletu Rozpětí: Délka: Hmotnost letová: 1300 mm 900
Děkujeme Vám za zakoupení stavebnice termického větroně FLOP - EPP Vyrábí : ŠAD-Model http://www.sad.okdar.net/modely Stavebnice rádiem řízeného elektroletu Rozpětí: Délka: Hmotnost letová: 1300 mm 900
StatSoft Jak vyzrát na datum
 StatSoft Jak vyzrát na datum Tento článek se věnuje podrobně možnostem práce s proměnnými, které jsou ve formě datumu. A že jich není málo. Pokud potřebujete pracovat s datumem, pak se Vám bude tento článek
StatSoft Jak vyzrát na datum Tento článek se věnuje podrobně možnostem práce s proměnnými, které jsou ve formě datumu. A že jich není málo. Pokud potřebujete pracovat s datumem, pak se Vám bude tento článek
Příručka online. Příručka pro Quick Utility Toolbox. čeština (Czech)
") Příručka online Příručka pro Quick Utility Toolbox čeština (Czech) Obsah Použití této příručky online.......................................... 3 Ochranné známky a licence.........................................
Příručka online Příručka pro Quick Utility Toolbox čeština (Czech) Obsah Použití této příručky online.......................................... 3 Ochranné známky a licence.........................................
Jak vytvořit nebo předělat vlastní motiv pro SunLight CMS
 Jak vytvořit nebo předělat vlastní motiv pro SunLight CMS V tomto tutoriálu se podíváme na to, jak si při troše šikovnosti udělat nebo předělat vybraný motiv pro redakční systém SunLight CMS. Jako příklad
Jak vytvořit nebo předělat vlastní motiv pro SunLight CMS V tomto tutoriálu se podíváme na to, jak si při troše šikovnosti udělat nebo předělat vybraný motiv pro redakční systém SunLight CMS. Jako příklad
Xenon XP 1950g. Stručný návod k použití. Kabelový plošný skener CZ-QS-01 Rev A 07/19
 Xenon XP 1950g Kabelový plošný skener Stručný návod k použití 1950-CZ-QS-01 Rev A 07/19 Agenturní model: 1950 Poznámka: Pokyny pro čištění zařízení naleznete v uživatelské příručce. Začínáme Před připojením
Xenon XP 1950g Kabelový plošný skener Stručný návod k použití 1950-CZ-QS-01 Rev A 07/19 Agenturní model: 1950 Poznámka: Pokyny pro čištění zařízení naleznete v uživatelské příručce. Začínáme Před připojením
Dolphin 60s Stručný návod k použití
 Dolphin 60s Stručný návod k použití 60s-CZ-QS Rev A 9/13 Po vybalení Ověřte si, že balení obsahuje následující položky: Mobilní terminál Dolphin 60s Nabíjecí baterie 3,7 V Li-Ion Nabíjecí a komunikační
Dolphin 60s Stručný návod k použití 60s-CZ-QS Rev A 9/13 Po vybalení Ověřte si, že balení obsahuje následující položky: Mobilní terminál Dolphin 60s Nabíjecí baterie 3,7 V Li-Ion Nabíjecí a komunikační
PROGRAM RP56 Odvodnění pláně Příručka uživatele Základní verze 2014
 PROGRAM RP56 Odvodnění pláně Příručka uživatele Základní verze 2014 Pragoprojekt a.s. 2014 1 Program RP-56 Program RP-56... 2 Funkce programu a zásady použité při jejich řešení... 2 56-1. Zadávací okno
PROGRAM RP56 Odvodnění pláně Příručka uživatele Základní verze 2014 Pragoprojekt a.s. 2014 1 Program RP-56 Program RP-56... 2 Funkce programu a zásady použité při jejich řešení... 2 56-1. Zadávací okno
Microcat Authorisation Server (MAS ) Uživatelská příručka
 Uživatelská příručka") Microcat Authorisation Server (MAS ) Uživatelská příručka Obsah Úvod... 2 Instalace Microcat Authorisation Server (MAS)... 3 Konfigurace MAS... 4 Nastavení licence... 4 Opce internetu... 5 Licenční manažer...
Microcat Authorisation Server (MAS ) Uživatelská příručka Obsah Úvod... 2 Instalace Microcat Authorisation Server (MAS)... 3 Konfigurace MAS... 4 Nastavení licence... 4 Opce internetu... 5 Licenční manažer...
Rešerše: Práce se sestavami v programu CATIA V5
 Rešerše: Práce se sestavami v programu CATIA V5 David Jonáš 6.9.2008 Úvod V této rešerši si popíšeme práci se sestavami a ukážeme si modelování v kontextu sestav v programu CATIA V5. Předpokládám základní
Rešerše: Práce se sestavami v programu CATIA V5 David Jonáš 6.9.2008 Úvod V této rešerši si popíšeme práci se sestavami a ukážeme si modelování v kontextu sestav v programu CATIA V5. Předpokládám základní
Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů
 Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů Metodický koncept k efektivní podpoře klíčových odborných kompetencí s využitím cizího jazyka ATCZ62 - CLIL jako výuková strategie na
Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů Metodický koncept k efektivní podpoře klíčových odborných kompetencí s využitím cizího jazyka ATCZ62 - CLIL jako výuková strategie na
Xenon 1900/1910. Stručný návod k použití. Kabelový skener. NG2D-CZ-QS Rev C 10/12
 Xenon 1900/1910 Kabelový skener Stručný návod k použití NG2D-CZ-QS Rev C 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete stáhnout
Xenon 1900/1910 Kabelový skener Stručný návod k použití NG2D-CZ-QS Rev C 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete stáhnout
Vuquest 3310g. Stručný návod k použití. Kabelový skener. 3310-CZ-QS Rev C 1/13
 Vuquest 3310g Kabelový skener Stručný návod k použití 3310-CZ-QS Rev C 1/13 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete stáhnout
Vuquest 3310g Kabelový skener Stručný návod k použití 3310-CZ-QS Rev C 1/13 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete stáhnout
programování formulářů Windows
 C# a WinForms programování formulářů Windows M i c r o s o f t. N E T D e v e l o p m e n t S e r i e s Chris Sells Microsoft.NET Development Series Windows Forms Programming in C# Authorized translation
C# a WinForms programování formulářů Windows M i c r o s o f t. N E T D e v e l o p m e n t S e r i e s Chris Sells Microsoft.NET Development Series Windows Forms Programming in C# Authorized translation
Inteligentní termostat otopného tělesa EasyControl
 6720881883 (2017/10) CZ Návod k instalaci a obsluze Inteligentní termostat otopného tělesa EasyControl Obsah Obsah 1 Vysvětlení symbolů a bezpečnostní pokyny 1 Vysvětlení symbolů a bezpečnostní pokyny..............
6720881883 (2017/10) CZ Návod k instalaci a obsluze Inteligentní termostat otopného tělesa EasyControl Obsah Obsah 1 Vysvětlení symbolů a bezpečnostní pokyny 1 Vysvětlení symbolů a bezpečnostní pokyny..............
Granit 1980i. Stručný návod k použití. Průmyslový Full Range Area-Imaging skener. GRNT1980-CZ-QS Rev A 1/15
 Granit 1980i Průmyslový Full Range Area-Imaging skener Stručný návod k použití GRNT1980-CZ-QS Rev A 1/15 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto
Granit 1980i Průmyslový Full Range Area-Imaging skener Stručný návod k použití GRNT1980-CZ-QS Rev A 1/15 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto
Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jan Boháček [ÚLOHA 31 - KÓTOVÁNÍ]
![Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jan Boháček [ÚLOHA 31 - KÓTOVÁNÍ]](/thumbs/55/37079910.jpg "Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jan Boháček [ÚLOHA 31 - KÓTOVÁNÍ]") Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jan Boháček [ÚLOHA 31 - KÓTOVÁNÍ] 1 CÍL KAPITOLY V této kapitole se zaměříme na kótování výkresů. Naším cílem bude naučit se používat správné příkazy
Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jan Boháček [ÚLOHA 31 - KÓTOVÁNÍ] 1 CÍL KAPITOLY V této kapitole se zaměříme na kótování výkresů. Naším cílem bude naučit se používat správné příkazy
PARAMETRICKÉ 3D MODELOVÁNÍ ODLITKU CATIA V5 R14 VÝKRES
 Cvičení 5 z předmětu CAD I. PARAMETRICKÉ 3D MODELOVÁNÍ ODLITKU CATIA V5 R14 VÝKRES Cílem pátého cvičení je osvojit si na jednoduchém modelu hřídele základní postupy při tvorbě výkresu rotační součástky.
Cvičení 5 z předmětu CAD I. PARAMETRICKÉ 3D MODELOVÁNÍ ODLITKU CATIA V5 R14 VÝKRES Cílem pátého cvičení je osvojit si na jednoduchém modelu hřídele základní postupy při tvorbě výkresu rotační součástky.
Postup: Nejprve musíme vyplnit tabulku. Pak bude vypadat takto:
 Úkol: Jednoduchá tabulka v Excelu Obrázky jsou vytvořené v Excelu verze 2003 CZ. Postupy jsou platné pro všechny běžně dostupné české verze Excelu s výjimkou verze roku 2007. Postup: Nejprve musíme vyplnit
Úkol: Jednoduchá tabulka v Excelu Obrázky jsou vytvořené v Excelu verze 2003 CZ. Postupy jsou platné pro všechny běžně dostupné české verze Excelu s výjimkou verze roku 2007. Postup: Nejprve musíme vyplnit
Příručka online. Příručka pro My Image Garden. čeština (Czech)
") Příručka online Příručka pro My Image Garden čeština (Czech) Obsah Použití této příručky online.......................................... 3 Ochranné známky a licence.........................................
Příručka online Příručka pro My Image Garden čeština (Czech) Obsah Použití této příručky online.......................................... 3 Ochranné známky a licence.........................................
MALÝ MANUÁL K DMAPU MARTIN DUCHOSLAV , POSLEDNÍ ÚPRAVA
 MALÝ MANUÁL K DMAPU MARTIN DUCHOSLAV 31.3.2001, POSLEDNÍ ÚPRAVA 6.9.2004 Obecné poznámky 1. program neumí češtinu, proto se vyvarujte užití českých znaků (zvl. háčků apod.) 2. data, ze kterých se tvoří
MALÝ MANUÁL K DMAPU MARTIN DUCHOSLAV 31.3.2001, POSLEDNÍ ÚPRAVA 6.9.2004 Obecné poznámky 1. program neumí češtinu, proto se vyvarujte užití českých znaků (zvl. háčků apod.) 2. data, ze kterých se tvoří
Granit 1910i. Stručný návod k použití. Průmyslový area imaging snímač. GRNT-CZ-QS Rev A 10/12
 Granit 1910i Průmyslový area imaging snímač Stručný návod k použití GRNT-CZ-QS Rev A 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si
Granit 1910i Průmyslový area imaging snímač Stručný návod k použití GRNT-CZ-QS Rev A 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si
Platnost Bernoulli Navierovy hypotézy
 Přednáška 03 Diferenciální rovnice ohybu prutu Platnost Bernoulli Navierovy hypotézy Schwedlerovy věty Rovnováha na segmentech prutu Clebschova metoda integrace Příklady Copyright (c) 011 Vít Šmilauer
Přednáška 03 Diferenciální rovnice ohybu prutu Platnost Bernoulli Navierovy hypotézy Schwedlerovy věty Rovnováha na segmentech prutu Clebschova metoda integrace Příklady Copyright (c) 011 Vít Šmilauer
To způsobuje počet nastavených kanálů detailu terénu, které jsou nastavené pod úhlem 45 stupňů.
 Jak vložit do mapy dynamický terén --------------------------------------- 1 Spousta začínajících i zkušenějších fanoušků virtuálního farmaření mi psali o návod k vytvoření tzv. Dynamického terénu, který
Jak vložit do mapy dynamický terén --------------------------------------- 1 Spousta začínajících i zkušenějších fanoušků virtuálního farmaření mi psali o návod k vytvoření tzv. Dynamického terénu, který
Styly odstavců. Word 2010. Přiřazení stylu odstavce odstavci. Změna stylu odstavce
 Styly odstavců V textu, který přesahuje několik stránek a je nějakým způsobem strukturovaný (což znamená, že se dá rozdělit na části (v knize jim říkáme kapitoly) a jejich podřízené části (podkapitoly),
Styly odstavců V textu, který přesahuje několik stránek a je nějakým způsobem strukturovaný (což znamená, že se dá rozdělit na části (v knize jim říkáme kapitoly) a jejich podřízené části (podkapitoly),
CzechPOINT@office a konverze na úřadech Martin Řehořek
 CzechPOINT@office a konverze na úřadech Martin Řehořek Novell Professional Services ČR, s.r.o. mrehorek@novell.com Agenda CzechPOINT@office Lokální administrátor Autorizovaná konverze na žádost Autorizovaná
CzechPOINT@office a konverze na úřadech Martin Řehořek Novell Professional Services ČR, s.r.o. mrehorek@novell.com Agenda CzechPOINT@office Lokální administrátor Autorizovaná konverze na žádost Autorizovaná
MS SQL Server 2008 Management Studio Tutoriál
 MS SQL Server 2008 Management Studio Tutoriál Vytvoření databáze Při otevření management studia a připojením se ke konkrétnímu sql serveru mám v levé části panel s názvem Object Explorer. V tomto panelu
MS SQL Server 2008 Management Studio Tutoriál Vytvoření databáze Při otevření management studia a připojením se ke konkrétnímu sql serveru mám v levé části panel s názvem Object Explorer. V tomto panelu
Vlastnosti dokumentu/stránky
 Vlastnosti dokumentu/stránky Formát stránky papíru pro tisk V záložce Rozložení stránky na pásu karet najdeme vše potřebné pro přípravu dokumentu před tiskem. 1) Záložka Rozložení stránky 2) Změna Orientace
Vlastnosti dokumentu/stránky Formát stránky papíru pro tisk V záložce Rozložení stránky na pásu karet najdeme vše potřebné pro přípravu dokumentu před tiskem. 1) Záložka Rozložení stránky 2) Změna Orientace
Děkujeme Vám za zakoupení stavebnice P-51 Mustang
 Děkujeme Vám za zakoupení stavebnice P-51 Mustang Vyrábí : ŠAD-Model http://www.sad.okdar.net/modely Stavebnice rádiem řízeného elektrolytu P-51 Mustang Rozpětí: Délka: Hmotnost letová: 1100 mm 930 mm
Děkujeme Vám za zakoupení stavebnice P-51 Mustang Vyrábí : ŠAD-Model http://www.sad.okdar.net/modely Stavebnice rádiem řízeného elektrolytu P-51 Mustang Rozpětí: Délka: Hmotnost letová: 1100 mm 930 mm
Copyright by Silca S.p.A All Rights Reserved. products quality.
 Jediná dostupná technologie pro klonování Texas 80 bit Ford, Toyota, Hyundai and Kia Silca T80+ je jedinečné řešení pro klonování transpondérů pro mnoho modelů značek Ford, Toyota, Hyundai a Kia. Silca
Jediná dostupná technologie pro klonování Texas 80 bit Ford, Toyota, Hyundai and Kia Silca T80+ je jedinečné řešení pro klonování transpondérů pro mnoho modelů značek Ford, Toyota, Hyundai a Kia. Silca
x 0; x = x (s kladným číslem nic nedělá)
") .. Funkce absolutní hodnota Předpoklady: 08, 07 x - zničí znaménko čísla, všechna čísla změní na nezáporná Jak vyjádřit matematicky? Pomocí číselné osy: x je vzdálenost obrazu čísla na číselné ose od počátku.
.. Funkce absolutní hodnota Předpoklady: 08, 07 x - zničí znaménko čísla, všechna čísla změní na nezáporná Jak vyjádřit matematicky? Pomocí číselné osy: x je vzdálenost obrazu čísla na číselné ose od počátku.
- 03 + 03 + 03 10-3 tailwheel with shock absorber, stearable, - 01 wheel 35 mm 11 hinge MS124024-15
 Part No. Part name Material, dimensions Loose In bag building plan A1 01-1 fuselage balsa- plywood assembly 01-1-2 elevator & rudder servo tray plastic 3 x 62 x 80 mm - 03 1-21 servo tray screw wood screw
Part No. Part name Material, dimensions Loose In bag building plan A1 01-1 fuselage balsa- plywood assembly 01-1-2 elevator & rudder servo tray plastic 3 x 62 x 80 mm - 03 1-21 servo tray screw wood screw
aktuality, novinky Ing. Martin Řehořek
 CzechPOINT@office aktuality, novinky Ing. Martin Řehořek Novell Professional Services ČR, s.r.o. mrehorek@novell.com Agenda CzechPOINT@office Aktuality z provozu KzMU statistiky Mám zájem o konverzi Kde
CzechPOINT@office aktuality, novinky Ing. Martin Řehořek Novell Professional Services ČR, s.r.o. mrehorek@novell.com Agenda CzechPOINT@office Aktuality z provozu KzMU statistiky Mám zájem o konverzi Kde
MIDAS GTS. gram_txt=gts
 K135YGSM Příklady (MIDAS GTS): - Plošný základ lineární výpočet a nelineární výpočet ve 2D MKP - Stabilita svahu ve 2D a 3D MKP - Pažící konstrukce ve 2D a 3D MKP MIDAS GTS http://en.midasuser.com http://departments.fsv.cvut.cz/k135/cms/?pa
K135YGSM Příklady (MIDAS GTS): - Plošný základ lineární výpočet a nelineární výpočet ve 2D MKP - Stabilita svahu ve 2D a 3D MKP - Pažící konstrukce ve 2D a 3D MKP MIDAS GTS http://en.midasuser.com http://departments.fsv.cvut.cz/k135/cms/?pa
Od Czech POINTu k vnitřní integraci
 Od Czech POINTu k vnitřní integraci Radek Novák Direct Account Manager Co mají společné??? - Czech POINT - Datové schránky (ISDS) - Vnitřní integrace úřadu 2 Projekt Czech POINT - 28.3.2007 zahájen pilotní
Od Czech POINTu k vnitřní integraci Radek Novák Direct Account Manager Co mají společné??? - Czech POINT - Datové schránky (ISDS) - Vnitřní integrace úřadu 2 Projekt Czech POINT - 28.3.2007 zahájen pilotní
OCAD 9. Stavba tratí. Seminář trenérů a stavitelů tratí Želiv
 OCAD 9 Stavba tratí Seminář trenérů a stavitelů tratí Želiv OCAD 9 - jednotlivci Správně nastavte měřítko mapy kresby tratí (shodně s podkladem lze změřit například mezi severníky) Vzdálenost mezi severníky
OCAD 9 Stavba tratí Seminář trenérů a stavitelů tratí Želiv OCAD 9 - jednotlivci Správně nastavte měřítko mapy kresby tratí (shodně s podkladem lze změřit například mezi severníky) Vzdálenost mezi severníky
Jestliže vše proběhlo tak, jak mělo, měl by výsledný materiál vypadat nějak takto:
 Cvičení 5 Animace Na tuto chvíli jste jistě čekali. Možná jste zkoušeli vytvářet různé scény a renderovat z nich statické obrázky až vás to pomalu omrzelo a chtěli byste se posunout o něco dál. Právě proto
Cvičení 5 Animace Na tuto chvíli jste jistě čekali. Možná jste zkoušeli vytvářet různé scény a renderovat z nich statické obrázky až vás to pomalu omrzelo a chtěli byste se posunout o něco dál. Právě proto
Xenon XP 1950h. Stručný návod k použití. Kabelový plošný skener pro zdravotnictví. 1950HC-CZ-QS-01 Rev A 07/19
 Xenon XP 1950h Kabelový plošný skener pro zdravotnictví Stručný návod k použití 1950HC-CZ-QS-01 Rev A 07/19 Agenturní model: 1950 Poznámka: Pokyny pro čištění zařízení naleznete v uživatelské příručce.
Xenon XP 1950h Kabelový plošný skener pro zdravotnictví Stručný návod k použití 1950HC-CZ-QS-01 Rev A 07/19 Agenturní model: 1950 Poznámka: Pokyny pro čištění zařízení naleznete v uživatelské příručce.
Supplier Web Uživatelská příručka. Supplier Web. Copyright Telefónica O2 Czech Republic, a.s. All rights reserved. 1/10
 Supplier Web 1/10 OBSAH: Supplier Web 1 ÚVOD... 3 1.1 POUŽITÍ... 3 1.2 ZNAČENÍ... 3 2 VSTUP DO APLIKACE... 4 3 OBJEDNÁVKY... 7 4 LEGAL DISCLAIMER... 10 2/10 1 Úvod 1.1 Použití Dokument slouží jako uživatelská
Supplier Web 1/10 OBSAH: Supplier Web 1 ÚVOD... 3 1.1 POUŽITÍ... 3 1.2 ZNAČENÍ... 3 2 VSTUP DO APLIKACE... 4 3 OBJEDNÁVKY... 7 4 LEGAL DISCLAIMER... 10 2/10 1 Úvod 1.1 Použití Dokument slouží jako uživatelská
Thor VM3. Stručný návod k použití. Počítač do vozidla. VM3-CSCZ-QS Rev A 1/16
 Thor VM3 Počítač do vozidla Stručný návod k použití VM3-CSCZ-QS Rev A 1/16 Součásti - přední P1 P8 P2 P9 P3 P10 P4 P11 P5 P12 P6 P13 P7 P14 Systémo vé LED diody Tlačítko napájení LED diody připojení Součásti
Thor VM3 Počítač do vozidla Stručný návod k použití VM3-CSCZ-QS Rev A 1/16 Součásti - přední P1 P8 P2 P9 P3 P10 P4 P11 P5 P12 P6 P13 P7 P14 Systémo vé LED diody Tlačítko napájení LED diody připojení Součásti
Lineární funkce, rovnice a nerovnice
 Lineární funkce, rovnice a nerovnice 1. Lineární funkce 1.1 Základní pojmy Pojem lineární funkce Funkce je předpis, který každému číslu x z definičního oboru funkce přiřadí právě jedno číslo y Obecně je
Lineární funkce, rovnice a nerovnice 1. Lineární funkce 1.1 Základní pojmy Pojem lineární funkce Funkce je předpis, který každému číslu x z definičního oboru funkce přiřadí právě jedno číslo y Obecně je
CAD_Inventor -cvičení k modelování a tvorbě technické obrazové dokumentace Vytváření výrobního výkresu rotační součásti - hřídele
 Předmět: Ročník: Vytvořil: Datum: CAD druhý, třetí Petr Machanec 24.8.2012 Název zpracovaného celku: CAD_Inventor -cvičení k modelování a tvorbě technické obrazové dokumentace Vytváření výrobního výkresu
Předmět: Ročník: Vytvořil: Datum: CAD druhý, třetí Petr Machanec 24.8.2012 Název zpracovaného celku: CAD_Inventor -cvičení k modelování a tvorbě technické obrazové dokumentace Vytváření výrobního výkresu
Platnost Bernoulli Navierovy hypotézy
 Přednáška 0 Platnost Bernoulli Navierovy hypotézy Diferenciální rovnice ohybu prutu Schwedlerovy věty Rovnováha na segmentech prutu Clebschova metoda integrace Vliv teploty na průhyb a křivost prutu Příklady
Přednáška 0 Platnost Bernoulli Navierovy hypotézy Diferenciální rovnice ohybu prutu Schwedlerovy věty Rovnováha na segmentech prutu Clebschova metoda integrace Vliv teploty na průhyb a křivost prutu Příklady
Manuál pro uživatele on-line hry Pimp Your Landscape. On-line hra Pimp your Landscape Návod pro uživatele
 On-line hra Pimp your Landscape Návod pro uživatele 1. Úvod Pimp your Landscape znamená, změnit existující krajinu tak, aby mohla naplňovat určitý optimalizovaný cíl, nebo aby mohly být naplněné různé
On-line hra Pimp your Landscape Návod pro uživatele 1. Úvod Pimp your Landscape znamená, změnit existující krajinu tak, aby mohla naplňovat určitý optimalizovaný cíl, nebo aby mohly být naplněné různé
Vytvoření tabulky: V následujícím okně si editujete okno tabulky. Vyzkoušejte si viz podklad Cv_09_Podklad_tabulka.xls a Cv_09_Tabulka.dwg.
 1. Tabulky, styly tabulek Obecné texty k vytváření tabulek najdete na této adrese: http://www.fce.vutbr.cz/studium/materialy/autocad/acad_i_cz/defaultce.html Nabídka Kreslení Tabulky. Lze se k nim dostat
1. Tabulky, styly tabulek Obecné texty k vytváření tabulek najdete na této adrese: http://www.fce.vutbr.cz/studium/materialy/autocad/acad_i_cz/defaultce.html Nabídka Kreslení Tabulky. Lze se k nim dostat
Uživatelská příručka
 NPD5257-02 CS Copyright Copyright Bez předchozího písemného povolení společnosti Seiko Epson Corporation je zakázáno reprodukovat libovolnou část této publikace, ukládat ve vyhledávacím systému nebo přenášet
NPD5257-02 CS Copyright Copyright Bez předchozího písemného povolení společnosti Seiko Epson Corporation je zakázáno reprodukovat libovolnou část této publikace, ukládat ve vyhledávacím systému nebo přenášet
( ) Absolutní hodnota. π = π. Předpoklady: základní početní operace. 0 = 0 S nezápornými čísly absolutní hodnota nic nedělá
 Absolutní hodnota. π = π. Předpoklady: základní početní operace. 0 = 0 S nezápornými čísly absolutní hodnota nic nedělá") 1..9 Absolutní hodnota Předpoklady: základní početní operace = 0 = 0 S nezápornými čísly absolutní hodnota nic nedělá π = π = 3 3 = Záporná čísla absolutní hodnota změní na kladná (vynásobí je 1) 5 5 3
1..9 Absolutní hodnota Předpoklady: základní početní operace = 0 = 0 S nezápornými čísly absolutní hodnota nic nedělá π = π = 3 3 = Záporná čísla absolutní hodnota změní na kladná (vynásobí je 1) 5 5 3
Voyager 1202g. Stručný návod k použití. Bezdrátový laserový snímač čárových kódů. VG1202-CZ-QS Rev A 10/11
 Voyager 1202g Bezdrátový laserový snímač čárových kódů Stručný návod k použití VG1202-CZ-QS Rev A 10/11 Poznámka: Začínáme Informace o čištění zařízení najdete v uživatelské příručce. Před připojením základny
Voyager 1202g Bezdrátový laserový snímač čárových kódů Stručný návod k použití VG1202-CZ-QS Rev A 10/11 Poznámka: Začínáme Informace o čištění zařízení najdete v uživatelské příručce. Před připojením základny
Manuál k ovládání aplikace INFOwin.
 Manuál k ovládání aplikace INFOwin. Základní práce s formuláři je ve všech modulech totožná. Vybereme tedy například formulář Pokladní kniha korunová na kterém si funkce ukážeme. Po zápisech se lze pohybovat
Manuál k ovládání aplikace INFOwin. Základní práce s formuláři je ve všech modulech totožná. Vybereme tedy například formulář Pokladní kniha korunová na kterém si funkce ukážeme. Po zápisech se lze pohybovat
2.4.9 Rovnice s absolutní hodnotou I
 ..9 Rovnice s absolutní hodnotou I Předpoklady: 0, 0, 05 Pedagogická poznámka: Obsah hodiny odpovídá přibližně 5 minutám. Je samozřejmě možné ji spojit s následující hodinou, pak ovšem část příkladů nestihnete
..9 Rovnice s absolutní hodnotou I Předpoklady: 0, 0, 05 Pedagogická poznámka: Obsah hodiny odpovídá přibližně 5 minutám. Je samozřejmě možné ji spojit s následující hodinou, pak ovšem část příkladů nestihnete
Preliminary Draft. Stručný návod k použití. Mobilní počítač Dolphin se systémem Windows CE 5.0
 Mobilní počítač Dolphin 6500 se systémem Windows CE 5.0 Stručný návod k použití Mobilní počítač Dolphin 6500 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6500
Mobilní počítač Dolphin 6500 se systémem Windows CE 5.0 Stručný návod k použití Mobilní počítač Dolphin 6500 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6500
Naučit se, jak co nejsnadněji přejít od verze TopoLu pro Windows k verzi TopoL xt. Cílem není vysvětlení všech možností programu.
 Školení programu TopoL xt Přechod na TopoL xt z programu TopoL pro Windows Cíl: Obsah: Naučit se, jak co nejsnadněji přejít od verze TopoLu pro Windows k verzi TopoL xt. Cílem není vysvětlení všech možností
Školení programu TopoL xt Přechod na TopoL xt z programu TopoL pro Windows Cíl: Obsah: Naučit se, jak co nejsnadněji přejít od verze TopoLu pro Windows k verzi TopoL xt. Cílem není vysvětlení všech možností
GB USA Parts list Part No. Part name Material, dimensions Loose In bag
 GB USA Parts list Part No. Part name Material, dimensions Loose In bag building plan A1 01-1 fuselage balsa- plywood assembly 01-1-2 elevator & rudder servo tray plastic 3 x 62 x 80 mm - 03 1-21 servo
GB USA Parts list Part No. Part name Material, dimensions Loose In bag building plan A1 01-1 fuselage balsa- plywood assembly 01-1-2 elevator & rudder servo tray plastic 3 x 62 x 80 mm - 03 1-21 servo
Základy práce na PC. Ing. Jan Roubíček
 Základy práce na PC Ing. Jan Roubíček Operační systém Windows VY_32_INOVACE_10_1_01_AP Operační systém Základní prostředí pro práci na počítači Spouštíme z něj další programy (aplikace) kancelářské aplikace
Základy práce na PC Ing. Jan Roubíček Operační systém Windows VY_32_INOVACE_10_1_01_AP Operační systém Základní prostředí pro práci na počítači Spouštíme z něj další programy (aplikace) kancelářské aplikace
Obrázek 3.1: Náhled konstrukce podsedáku
 Lekce 3 Židlička Časová dotace: 1 vyučovací hodina V této lekci si vymodelujeme velmi jednoduchou židličku. Tvorba židle se skládá z několika kroků, první částí bude utvoření podsedáku, který poté doplníme
Lekce 3 Židlička Časová dotace: 1 vyučovací hodina V této lekci si vymodelujeme velmi jednoduchou židličku. Tvorba židle se skládá z několika kroků, první částí bude utvoření podsedáku, který poté doplníme
Závěrečná práce. AutoCAD Inventor 2010. (Zadání D1)
") Závěrečná práce AutoCAD Inventor 2010 (Zadání D1) Pavel Čurda 4.B 4.5. 2010 Úvod Tato práce obsahuje sestavu modelu, prezentaci a samotný výkres Pákového převodu na přiloženém CD. Pákový převod byl namalován
Závěrečná práce AutoCAD Inventor 2010 (Zadání D1) Pavel Čurda 4.B 4.5. 2010 Úvod Tato práce obsahuje sestavu modelu, prezentaci a samotný výkres Pákového převodu na přiloženém CD. Pákový převod byl namalován
Konstrukce součástky
 Konstrukce součástky 1. Sestrojení dvou válců, které od sebe odečteme. Vnější válec má střed podstavy v bodě [0,0], poloměr podstavy 100 mm, výška válce je 100 mm. Vnitřní válec má střed podstavy v bodě
Konstrukce součástky 1. Sestrojení dvou válců, které od sebe odečteme. Vnější válec má střed podstavy v bodě [0,0], poloměr podstavy 100 mm, výška válce je 100 mm. Vnitřní válec má střed podstavy v bodě
5 Procedurální materiály
 5 Procedurální materiály Procedurální materiál je tvořen kombinací dvou nebo více materiálových složek. Procedura pomocí určitého matematického vztahu kombinuje své materiálové potomky. Každý z těchto
5 Procedurální materiály Procedurální materiál je tvořen kombinací dvou nebo více materiálových složek. Procedura pomocí určitého matematického vztahu kombinuje své materiálové potomky. Každý z těchto
TVORBA VÝROBNÍ DOKUMENTACE CV
 Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní TVORBA VÝROBNÍ DOKUMENTACE CV Návody do cvičení předmětu Výrobní dokumentace v systému CAD Dr. Ing. Jaroslav Melecký Ostrava 2011 Tyto studijní
Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní TVORBA VÝROBNÍ DOKUMENTACE CV Návody do cvičení předmětu Výrobní dokumentace v systému CAD Dr. Ing. Jaroslav Melecký Ostrava 2011 Tyto studijní
INSTALACE PRODUKTU ONTOPIA KNOWLEDGE SUITE
 INSTALACE PRODUKTU ONTOPIA KNOWLEDGE SUITE profesionální verze 1 Obsah Požadavky... 3 Instalace... 3 Proměnná CLASSPATH... 3 Zpřístupnění licenčního klíče... 3 Ověřování komponent OKS. 3 Spouštíme aplikaci
INSTALACE PRODUKTU ONTOPIA KNOWLEDGE SUITE profesionální verze 1 Obsah Požadavky... 3 Instalace... 3 Proměnná CLASSPATH... 3 Zpřístupnění licenčního klíče... 3 Ověřování komponent OKS. 3 Spouštíme aplikaci
Základní škola Hluk výukové texty MS Word 2007
 MS Word je textový editor (program pro tvorbu a editaci textových dokumentů). Ve verzi 2007 došlo k zásadní změně v grafickém prostředí a tedy i ovládání programu. Základní ovládací prvky aplikace: RÁM
MS Word je textový editor (program pro tvorbu a editaci textových dokumentů). Ve verzi 2007 došlo k zásadní změně v grafickém prostředí a tedy i ovládání programu. Základní ovládací prvky aplikace: RÁM
8018/8020 Mini rýpadlo s konvenční zádí nástavby
 NEW 8018/ MINI RÝPADLO 8018/8020 Mini rýpadlo s konvenční zádí nástavby Provozní hmotnost: 1822kg / 2067kg Výkon motoru: 14.2kW 8018/ MINI RÝPADLO SPECIFIKACE STATICKÉ ROZMĚRY Podvozek E D Počet spodních
NEW 8018/ MINI RÝPADLO 8018/8020 Mini rýpadlo s konvenční zádí nástavby Provozní hmotnost: 1822kg / 2067kg Výkon motoru: 14.2kW 8018/ MINI RÝPADLO SPECIFIKACE STATICKÉ ROZMĚRY Podvozek E D Počet spodních
WWW STRÁNKY Tvorba webové stránky TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY.
 WWW STRÁNKY Tvorba webové stránky TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Úvod do tvorby webové stránky Jména souborů Svoje HTML soubory pojmenujte
WWW STRÁNKY Tvorba webové stránky TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Úvod do tvorby webové stránky Jména souborů Svoje HTML soubory pojmenujte
MAXGUARD GT gelcoat na výrobu forem AME 6000 T-35 bariérová pryskyřice AROPOL XO pryskyřice na výrobu forem
 XO = vynikající rozměrová stabilita MAXGUARD GT gelcoat na výrobu forem AME 6000 T-35 bariérová pryskyřice AROPOL XO pryskyřice na výrobu forem model model vyrobte ze styrenu odolného materiálu. zhotovte
XO = vynikající rozměrová stabilita MAXGUARD GT gelcoat na výrobu forem AME 6000 T-35 bariérová pryskyřice AROPOL XO pryskyřice na výrobu forem model model vyrobte ze styrenu odolného materiálu. zhotovte
Uživatelská příručka
 NPD5100-07 CS Copyright Copyright Bez předchozího písemného povolení společnosti Seiko Epson Corporation je zakázáno reprodukovat libovolnou část této publikace, ukládat ve vyhledávacím systému nebo přenášet
NPD5100-07 CS Copyright Copyright Bez předchozího písemného povolení společnosti Seiko Epson Corporation je zakázáno reprodukovat libovolnou část této publikace, ukládat ve vyhledávacím systému nebo přenášet
Xenon 1902/1912. Stručný návod k použití. Bezdrátový skener. Crdlss-NG2D-CZ-QS Rev C 10/12
 Xenon 1902/1912 Bezdrátový skener Stručný návod k použití Crdlss-NG2D-CZ-QS Rev C 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete
Xenon 1902/1912 Bezdrátový skener Stručný návod k použití Crdlss-NG2D-CZ-QS Rev C 10/12 Poznámka: Informace o čištění zařízení najdete v uživatelské příručce. Lokalizované verze tohoto dokumentu si můžete
Použití filtrů v Museionu
 Příručka uživatele systému Museion Použití filtrů v Museionu uživatele systému Museion Autorská práva Copyright 2012-2015 MUSOFT.CZ, s.r.o.. Všechna práva vyhrazena. Tato příručka je chráněna autorskými
Příručka uživatele systému Museion Použití filtrů v Museionu uživatele systému Museion Autorská práva Copyright 2012-2015 MUSOFT.CZ, s.r.o.. Všechna práva vyhrazena. Tato příručka je chráněna autorskými
ONLY FOR FLIGHT SIMULATION USAGE NOT FOR REAL WORLD FLYING
 ŠKOLA PILOTŮ Základy letu ONLY FOR FLIGHT SIMULATION USAGE NOT FOR REAL WORLD FLYING Author: Ondřej Sekal Valid from: 2010-07-12 Page 1 of 8 Úvod Tato příručka slouží jako učební materiál ke studiu pro
ŠKOLA PILOTŮ Základy letu ONLY FOR FLIGHT SIMULATION USAGE NOT FOR REAL WORLD FLYING Author: Ondřej Sekal Valid from: 2010-07-12 Page 1 of 8 Úvod Tato příručka slouží jako učební materiál ke studiu pro
2.4.9 Rovnice s absolutní hodnotou I
 ..9 Rovnice s absolutní hodnotou I Předpoklady: 0, 0, 05 Pedagogická poznámka: Obsah hodiny odpovídá přibližně 5 minutám. Je samozřejmě možné ji spojit s následující hodinou, pak ovšem část příkladů nestihnete
..9 Rovnice s absolutní hodnotou I Předpoklady: 0, 0, 05 Pedagogická poznámka: Obsah hodiny odpovídá přibližně 5 minutám. Je samozřejmě možné ji spojit s následující hodinou, pak ovšem část příkladů nestihnete
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
NÁVOD K NASTAVENÍ VODÍTEK PILOVÉHO PÁSU ADJUSTING SAW BLADE GUIDE
 CZ Návod k nastavení Pilového pásu EN User Manual Metal band saw NÁVOD K NASTAVENÍ VODÍTEK PILOVÉHO PÁSU ADJUSTING SAW BLADE GUIDE BS 115N / BS 128PRO / BS 712N / BS 712PRO Pásové pily na kov metal band
CZ Návod k nastavení Pilového pásu EN User Manual Metal band saw NÁVOD K NASTAVENÍ VODÍTEK PILOVÉHO PÁSU ADJUSTING SAW BLADE GUIDE BS 115N / BS 128PRO / BS 712N / BS 712PRO Pásové pily na kov metal band
Okno Editoru nabízí v panelu nástrojů
 110 Editor pracovní nástroje Naučte se používat základní nástroje Editoru pro efektivní úpravy obrázků. VYBRANÉ OVLÁDACÍ PRVKY 112 POLYGONOVÉ LASO A LASO 124 VLOŽIT OBRÁZEK DO OBRÁZKU 132 VÝBĚRY 114 REDUKCE
110 Editor pracovní nástroje Naučte se používat základní nástroje Editoru pro efektivní úpravy obrázků. VYBRANÉ OVLÁDACÍ PRVKY 112 POLYGONOVÉ LASO A LASO 124 VLOŽIT OBRÁZEK DO OBRÁZKU 132 VÝBĚRY 114 REDUKCE
SZIF - Evropské dotace s plnou elektronickou podporou a kontrolou
 SZIF - Evropské dotace s plnou elektronickou podporou a kontrolou Charakteristiky řešení IS SZIF SAP Realizace platební agentury SZIF je řešení: o A komplexní, o B integrované, o C podporující standardizaci
SZIF - Evropské dotace s plnou elektronickou podporou a kontrolou Charakteristiky řešení IS SZIF SAP Realizace platební agentury SZIF je řešení: o A komplexní, o B integrované, o C podporující standardizaci
GRAF FUNKCE NEPŘÍMÁ ÚMĚRNOST
 GRAF FUNKCE NEPŘÍMÁ ÚMĚRNOST Úloha: Sestrojte graf funkce nepřímé úměrnosti a zjistěte její vlastnosti. Popis funkcí modelu: Sestrojit graf funkce nepřímá úměrnost Najít průsečíky grafu se souřadnými osami
GRAF FUNKCE NEPŘÍMÁ ÚMĚRNOST Úloha: Sestrojte graf funkce nepřímé úměrnosti a zjistěte její vlastnosti. Popis funkcí modelu: Sestrojit graf funkce nepřímá úměrnost Najít průsečíky grafu se souřadnými osami
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Technické parametry transformátorů RESIBLOC Unikátní technologie pro speciální aplikace
 Technické parametry transformátorů RESIBLOC Unikátní technologie pro speciální aplikace Již kolem 40-ti let ABB vyrábí a dodává transformátory RESIBLOC do celého světa. Naše těžko zápalné a ekologické
Technické parametry transformátorů RESIBLOC Unikátní technologie pro speciální aplikace Již kolem 40-ti let ABB vyrábí a dodává transformátory RESIBLOC do celého světa. Naše těžko zápalné a ekologické
Hydropneumatické tlumení v mobilních aplikacích
 Hydropneumatické tlumení v mobilních aplikacích The reproduction, distribution and utilization of this document as well as the communication of its contents to others without explicit authorization is
Hydropneumatické tlumení v mobilních aplikacích The reproduction, distribution and utilization of this document as well as the communication of its contents to others without explicit authorization is
Samsung Universal Print Driver Uživatelská příručka
 Samsung Universal Print Driver Uživatelská příručka představte si ty možnosti Copyright 2009 Samsung Electronics Co., Ltd. Všechna práva vyhrazena. Tato příručka správce je poskytována pouze pro informativní
Samsung Universal Print Driver Uživatelská příručka představte si ty možnosti Copyright 2009 Samsung Electronics Co., Ltd. Všechna práva vyhrazena. Tato příručka správce je poskytována pouze pro informativní
UniLog-D. v1.01 návod k obsluze software. Strana 1
 UniLog-D v1.01 návod k obsluze software Strana 1 UniLog-D je PC program, který slouží k přípravě karty pro záznam událostí aplikací přístroje M-BOX, dále pak k prohlížení, vyhodnocení a exportům zaznamenaných
UniLog-D v1.01 návod k obsluze software Strana 1 UniLog-D je PC program, který slouží k přípravě karty pro záznam událostí aplikací přístroje M-BOX, dále pak k prohlížení, vyhodnocení a exportům zaznamenaných
Práce se styly 1. Styl
 Práce se styly 1. Styl Styl se používá, pokud chceme, aby dokument měl jednotný vzhled odstavců. Můžeme si nadefinovat styly pro různé úrovně nadpisů, jednotlivé popisy, charakteristiky a další odstavce.
Práce se styly 1. Styl Styl se používá, pokud chceme, aby dokument měl jednotný vzhled odstavců. Můžeme si nadefinovat styly pro různé úrovně nadpisů, jednotlivé popisy, charakteristiky a další odstavce.