ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
|
|
|
- Přemysl Doležal
- před 5 lety
- Počet zobrazení:
Transkript
1 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Analýza návrhu asynchronního stroje metodou konečných prvků Bc. Markéta Kydlíčková 2017
2
3
4 Abstrakt Předkládaná diplomová práce byla zaměřena na výpočtový návrh asynchronního motoru s klecí nakrátko, určení parametrů náhradního schéma a momentové charakteristiky s následným ověřením hodnot, získaných analytickým výpočtem metodou konečných prvků a jejich vzájemným porovnáním. Klíčová slova 3-f asynchronní motor, návrh asynchronního motoru, klec nakrátko, momentová charakteristika, náhradní schéma, FEMM, metoda konečných prvků
5 Abstract This diploma thesis focused on the design of asynchronous motor with squirrel cage, determination of equivalent circuit parameters and torque characteristics with subsequent verification of values obtained by analytical calculation by finite element method and their mutual comparison. Key words Three-phase induction motor, design of asynchronous motor, squirrel cage, torque characteristic, equivalent circuit, Finite element method
6 Prohlášení Prohlašuji, že jsem tuto diplomovou práci vypracovala samostatně, s použitím odborné literatury a pramenů uvedených v seznamu, který je součástí této diplomové práce. Dále prohlašuji, že veškerý software, použitý při řešení této diplomové práce, je legální.... podpis V Plzni dne Markéta Kydlíčková
7 Poděkování Především bych ráda poděkovala vedoucímu diplomové práce Ing. Janu Šobrovi,za jeho čas a cenné rady při konzultacích práce, za jeho připomínky a metodické vedení práce. Také bych ráda poděkovala své rodině, především za psychickou podporu během zpracování práce.
8 Obsah 1 ASYNCHRONNÍ STROJ ASYNCHRONNÍ MOTORY S KLECÍ NAKRÁTKO ASYNCHRONNÍ MOTORY S KROUŽKOVOU KOTVOU KLECE ASYNCHRONNÍCH MOTORŮ Vírová klec PRINCIP VÍROVÉ KLECE Boucherotova klec (dvojitá klec) TVARY DRÁŽEK BOUCHEROTOVY KLECE PRINCIP DVOJITÉ KLECE NÁVRH ASYNCHRONNÍHO STROJE...23 MINIMÁLNÍ A MAXIMÁLNÍ DRÁŽKOVÁ ROZTEČ DRÁŽKOVÁ ROZTEČ STATORU JMENOVITÝ PROUD VINUTÍ STATORU POČET ZÁVITŮ STATOROVÉHO VINUTÍ POČET DRÁŽEK POČET CÍVEK PŘEDNÍ CÍVKOVÝ KROK V POČTU DRÁŽEK NA PÓL POČET FÁZOVÝCH SVAZKŮ POČET FÁZOVÝCH SVAZKŮ NA FÁZI POČET CÍVEK VE SVAZKU SKUTEČNÁ LINEÁRNÍ PROUDOVÁ HUSTOTA POMĚRNÉ ZKRÁCENÍ KROKU PŘEDBĚŽNÁ PROUDOVÁ HUSTOTA PŘEDBĚŽNÝ PRŮŘEZ EFEKTIVNÍHO VODIČE PRŮŘEZ JEDNOTLIVÉHO VODIČE VÝPOČET ROZMĚRŮ DRÁŽEK A ZUBŮ STATORU...33 ČINITEL PLNĚNÍ ŽELEZA ŠÍŘKA ZUBU STATORU VÝŠKA ZUBU STATORU VÝŠKA STATOROVÉHO JHA HLOUBKA DRÁŽKY ŠÍŘKA DNA DRÁŽKY ŠÍŘKA VRCHOLU DRÁŽKY AKTIVNÍ HLOUBKA DRÁŽKY ČINITEL PLNĚNÍ DRÁŽKY VELIKOST VZDUCHOVÉ MEZERY VÝPOČET ROTORU...35 VNĚJŠÍ PRŮMĚR ROTORU VNITŘNÍ PRŮMĚR ROTORU DÉLKA ROTORU POČET ROTOROVÝCH DRÁŽEK DRÁŽKOVÁ ROZTEČ ROTORU ČINITEL PŘEPOČTU PROUDŮ PROUD V TYČI PROUDOVÁ HUSTOTA V TYČI ROTORU PRŮŘEZ TYČE PROUD V KRUHU NAKRÁTKO PROUDOVÁ HUSTOTA V KRUHU PRŮŘEZ KRUHU ROZMĚRY KRUHU NAKRÁTKO VÝŠKA ROTOROVÉHO JHA ŠÍŘKA ZUBU ROTORU
9 ŠÍŘKA DRÁŽKY POD KRČKEM ŠÍŘKA DRÁŽKY U DNA HLOUBKA ROTOROVÉ DRÁŽKY MAGNETICKÝ OBVOD...37 MAGNETICKÁ INDUKCE V ZUBECH STATORU MAGNETICKÁ INDUKCE V ZUBECH ROTORU MAGNETICKÁ INDUKCE VE JHU STATORU MAGNETICKÁ INDUKCE VE JHU ROTORU CARTERŮV ČINITEL MAGNETICKÉ NAPĚTÍ VZDUCHOVÉ MEZERY MAGNETICKÉ NAPĚTÍ ZUBU STATORU MAGNETICKÉ NAPĚTÍ ZUBU ROTORU ČINITEL NASYCENÍ ZUBŮ STŘEDNÍ DÉLKA INDUKČNÍ ČÁRY VE JHU STATORU MAGNETICKÉ NAPĚTÍ JHA STATORU STŘEDNÍ DÉLKA INDUKČNÍ ČÁRY VE JHU ROTORU VÝŠKA JHA ROTORU MAGNETICKÉ NAPĚTÍ JHA ROTORU MAGNETICKÉ NAPĚTÍ NA JEDNU PÓLOVOU DVOJICI ČINITEL NASYCENÍ MAGNETICKÉHO OBVODU MAGNETIZAČNÍ PROUD POMĚRNÁ HODNOTA MAGNETIZAČNÍHO PROUDU VÝPOČET PRVKŮ NÁHRADNÍHO SCHÉMA...40 STŘEDNÍ ŠÍŘKA CÍVKY DÉLKA DRÁŽKOVÉ ČÁSTI DÉLKA ČELA CÍVKY VYLOŽENÍ ČEL STATOROVÉHO VINUTÍ STŘEDNÍ DÉLKA ZÁVITU DÉLKA VODIČŮ JEDNÉ FÁZE STATOROVÉHO VINUTÍ ODPOR JEDNÉ FÁZE STATOROVÉHO VINUTÍ POMĚRNÁ HODNOTA STATOROVÉHO ODPORU ODPOR TYČE ROTOROVÉHO VINUTÍ ODPOR KRUHU NAKRÁTKO ODPOR FÁZE ROTOROVÉHO VINUTÍ ODPOR FÁZE ROTORU PŘEPOČTENÝ NA POČET ZÁVITŮ STATORU POMĚRNÁ HODNOTA PŘEPOČTENÉHO ODPORU ČINITEL K Β ČINITEL K Β ČINITEL MAGNETICKÉ VODIVOSTI V DRÁŽCE ČINITEL MAGNETICKÉ VODIVOSTI DIFERENČNÍHO ROZPTYLU ROZPTYLOVÁ REAKTANCE FÁZE STATOROVÉHO VINUTÍ POMĚRNÁ HODNOTA ROZPTYLOVÉ REAKTANCE ČINITEL MAGNETICKÉ VODIVOSTI DRÁŽKY ROTOROVÉHO VINUTÍ ČINITEL MAGNETICKÉ VODIVOSTI ČEL ROTOROVÉHO VINUTÍ ČINITEL MAGNETICKÉ VODIVOSTI DIFERENČNÍHO ROZPTYLU ROTORU CELKOVÝ ČINITEL MAGNETICKÉ VODIVOSTI ROTOROVÉHO VINUTÍ ROZPTYLOVÁ REAKTANCE FÁZE ROTOROVÉHO VINUTÍ PŘEPOČÍTANÁ ROZPTYLOVÁ REAKTANCE ROTOROVÉHO VINUTÍ POMĚRNÁ HODNOTA ROZPTYLOVÉ REAKTANCE ROTOROVÉHO VINUTÍ VÝPOČET ZTRÁT...45 HMOTNOST JHA STATORU HMOTNOST ZUBŮ STATORU HLAVNÍ ZTRÁTY V ŽELEZE PULSUJÍCÍ INDUKCE VE VZDUCHOVÉ MEZEŘE NAD HLAVAMI ZUBŮ STATORU HUSTOTA POVRCHOVÝCH ZTRÁT STATORU POVRCHOVÉ ZTRÁTY V STATORU
10 PULSUJÍCÍ INDUKCE VE VZDUCHOVÉ MEZEŘE NAD HLAVAMI ZUBŮ ROTORU HUSTOTA POVRCHOVÝCH ZTRÁT ROTORU POVRCHOVÉ ZTRÁTY V ROTORU HMOTNOST ZUBŮ ROTORU INDUKCE PULZACÍ VE STŘEDNÍM PRŮŘEZU ZUBU STATORU PULZNÍ ZTRÁTY V ZUBECH STATORU INDUKCE PULZACÍ VE STŘEDNÍM PRŮŘEZU ZUBU ROTORU PULZNÍ ZTRÁTY V ZUBECH ROTORU DODATEČNÉ ZTRÁTY V ŽELEZE CELKOVÉ ZTRÁTY V ŽELEZE MECHANICKÉ ZTRÁTY A VENTILAČNÍ ZTRÁTY PŘÍDAVNÉ ZTRÁTY DODATEČNÉ ZTRÁTY ELEKTRICKÉ ZTRÁTY VE VŠECH FÁZÍCH VINUTÍ STATORU ELEKTRICKÉ ZTRÁTY V KLECOVÉM VINUTÍ ROTORU NAKRÁTKO ELEKTRICKÉ ZTRÁTY STATORU PŘI CHODU NAPRÁZDNO CELKOVÉ ZTRÁTY ÚČINNOST VYPOČÍTANÁ ZE ZTÁT ČINNÝ PROUD NAPRÁZDNO MOTORU ÚČINÍK NAPRÁZDNO ZATĚŽOVACÍ CHARAKTERISTIKY...50 ODPOR PŘÍČNÉ VĚTVE DLE NÁHRADNÍHO SCHÉMATU REAKTANCE PŘÍČNÉ VĚTVE DLE NÁHRADNÍHO SCHÉMATU ČINITEL Γ ČINITEL ROZPTYLU JMENOVITÝ SKLUZ TEPELNÝ VÝPOČET...51 ELEKTRICKÉ ZTRÁTY V DRÁŽKÁCH ČINITEL ZVÝŠENÍ ZTRÁT PRO IZOLACI TŘÍDY F ELEKTRICKÉ ZTRÁTY V ČELECH CÍVEK OTEPLENÍ VNITŘNÍHO POVRCHU STATOROVÉHO SVAZKU NAD TEPLOTU VZDUCHU UVNITŘ STROJE TEPLOTNÍ SPÁD V IZOLACI DRÁŽKOVÉ ČÁSTI VÝPOČTOVÝ OBVOD STATOROVÉ DRÁŽKY TEPLOTNÍ SPÁD NA TLOUŠŤCE IZOLACE ČEL OTEPLENÍ VNĚJŠÍHO POVRCHU ČEL NAD TEPLOTU VZDUCHU UVNITŘ STROJE STŘEDNÍ OTEPLENÍ STATOROVÉHO VINUTÍ NAD TEPLOTU VZDUCHU UVNITŘ STROJE SOUČET ZTRÁT SOUČET VŠECH ZTRÁT ODVÁDĚNÝCH DO VZDUCHU UVNITŘ STROJE EKVIVALENTNÍ OCHLAZOVACÍ POVRCH TĚLESA STROJE OTEPLENÍ VZDUCHU VE STROJI NAD TEPLOTU OKOLÍ STŘEDNÍ OTEPLENÍ STATOROVÉHO VINUTÍ NAD TEPLOTU OKOLÍ VÝPOČET VENTILACE...55 POTŘEBNÝ PRŮTOK VZDUCHU PRO VENTILACI PRŮTOK VZDUCHU, KTERÝ DODÁVÁ VNĚJŠÍ VENTILÁTOR OVĚŘENÍ NÁVRHU POMOCÍ METODY KONEČNÝCH PRVKŮ...56 ZÍSKÁNÍ JEDNOTLIVÝCH HODNOT PRO VÝPOČET STANOVENÍ PARAMETRŮ NÁHRADNÍHO SCHÉMA STANOVENÍ MAGNETIZAČNÍ REAKTANCE X Μ ENERGIE MAGNETICKÉHO POLE PŘEPOČTENÁ NA JEDNU FÁZI VZTAH PRO MAGNETICKOU INDUKČNOST VÝSLEDNÁ MAGNETIZAČNÍ REAKTANCE STANOVENÍ ODPORU RESPEKTUJÍCÍHO ZTRÁTY V ŽELEZE R FE STANOVENÍ STATOROVÉHO ODPORU R
11 ODPOR STATOROVÉ DRÁŽKY VÝSLEDNÝ STATOROVÝ ODPOR STANOVENÍ ROZPTYLOVÉ REAKTANCE X 1Σ ENERGIE MAGNETICKÉHO POLE V DRÁŽCE PŘEPOČTENÁ NA JEDNU FÁZI VZTAH PRO MAGNETICKOU INDUKČNOST VÝSLEDNÁ MAGNETIZAČNÍ REAKTANCE STANOVENÍ ROZPTYLOVÉ REAKTANCE X 2Σ REAKTANCE ROTOROVÉ TYČE VÝSLEDNÁ ROZPTYLOVÁ REAKTANCE STANOVENÍ ROTOROVÉHO ODPORU R ODPOR TYČE PŘEPOČÍTANÝ NA JEDNU FÁZI ROTOROVÝ ODPOR VÝSLEDNÝ ODPOR
12 Úvod Tato diplomová práce byla zaměřena na návrh asynchronního stroje. Na základě elektromagnetického výpočtu byly zhotoveny parametry stroje a rozměrový výkres. Metodou konečných prvků poté byly stanoveny parametry náhradního schéma a momentová charakteristika stroje. V závěru této práce bylo provedeno porovnání hodnot získaných analytickým výpočtem v bodu zadání 1 s výsledky, které byly získány metodou konečných prvků nasimulovaných v programu FEMM 4.2. Text je rozdělen do čtyřech částí,v první jsem se zabývala konstrukcí asynchronních strojů s klecí nakrátko, v druhé části jsem provedla návrh asynchronního stroje. V třetí části popisovalaprostředí v programu FEMM a následné získání hodnot pro ověření výpočtu. V závěru jsem pak uvedla porovnání analytického výpočtu se získanými hodnotami z programu FEMM. 12
13 Seznam symbolů a zkratek P... Výstupní výkon [W] n... Otáčky [ot/min] U... Jmenovité napětí [V] f... Frekvence [Hz] m... Počet fází [-] p... Počet pólových dvojic [-] h... Výška osy stroje [m] D... Vnější průměr statoru [m] D... Vnitřní průměr statoru [m] t... Pólová rozteč [m] K... Poměr indukovaného napětí vinutí k jmenovitému napětí [-] η... Účinnost stroje [-] cos φ... Účiník [-] P... Vnitřní výkon stroje [W] k... Předběžný činitel vinutí k... Činitel tvaru pole [-] α... Činitel pólového krytí [-] ω... synchronní rychlost [rad/s] l... ideální délka stroje [m] λ... Štíhlostní poměr stroje [-] l... Délka železa stroje [m] Q... Počet drážek na statoru [-] q... Počet drážek na póĺ a fázi [-] t... Drážková rozteč statoru [-] I... Jmenovitý proud vinutí statoru [A] V... Počet vodičů v drážce [-] N... Počet závitů [-] A... Lineární proudová hustota [A/m] β... Poměrné zkrácení kroku [-] k... Činitel kroku [-] k... Činitel rozlohy [-] 13
14 k... Činitel vinutí [-] Φ... Magnetický tok [Wb] B... Indukce ve vzduchové mezeře [T] AJ... A-J kritérium, hustota proudu ve vinutí [A /m ] S... Efektivní průřez vodiče [m ] np... počet dílčích vodičů [-] S... Průřez vodiče [m ] J... Proudová hustota ve statorovém vinutí [A/m ] B... Indukce ve jhu statoru [T] B... Indukce v zubu statoru [T] B... Indukce v zubech statoru v nejužším průřezu [T] k... Činitel plnění železa [-] b... Šířka zubu statoru [m] h... Výška zubu statoru [m] h... Výška statorového jha [m] h... Hloubka drážky [m] b... Šířka dna drážky [m] b... Šířka drážky v horní části [m] b... Šířka vrcholu drážky [m] h... Aktivní hloubka drážky [m] S... Plocha drážky [m ] K... Činitel plnění drážky [-] δ... Vzduchová mezera [m] B... Indukce jha rotoru [T] B... Indukce v zubu rotoru [T] B... Indukce v nejužším průřezu rotoru [T] h... Výška jha rotoru [m] D... Vnější průměr rotoru [m] D... Vnitřní průměr rotoru [m] k... Činitel pro výpočet průměru hřídele [-] Q... Počet drážek rotoru [-] k... Činitel respektující vliv magnetizačního proudu [-] 14
15 P... Převod stroje [-] I... Proud v tyčích rotoru [A] J... Proudová hustota v tyči rotoru [A/m ] S... Průřez tyče rotoru [m ] α... Pootočení proudu v tyčích [rad] I... Proud v kruhu nakrátko [A] J... Proudová hustota v kruhu [A/m ] S... Průřez kruhu [m ] a... rozměr kruhu a [m] b... rozměr kruhu b [m] b... Šířka zubu [m] h... Výška zubu [m] t... Drážková rozteč na rotoru [m] h... výška otevření drážky[m] b... Šířka drážky na rotoru [m] h... Hloubka rotorové drážky [m] k... Carterův činitel [-] U... Magnetické napětí ve vzduchové mezeře [A] H... Intenzita magnetického pole v zubu statoru [A/m] H... Intenzita magnetického pole ve jhu statoru [A/m] H... Intenzita magnetického pole v zubu rotoru [A/m] H... Intenzita magnetického pole ve jhu rotoru [A/m] U... Magnetické napětí na zubu statoru [A] U... Magnetické napětí na zubu rotoru [A] l... Délka střední magnetické indukční čáry jha statoru [m] U... Magnetické napětí ve jhu statoru [A] l... Délka střední magnetické indukční čáry jha rotoru [m] U... Magnetické napětí ve jhu rotoru [A] F... Výsledné magnetické napětí na jednu pólovou dvojici [A] I... Magnetizační proud [A] i... Poměrná hodnota magnetizačního proudu [-] R... Odpor vinutí statoru [Ω] 15
16 k... Činitel zvětšení odporu vlivem skinefektu [-] ρ... Měrný odpor mědi [Ωm] L... Celková délka vodiče [m] l... Střední délka závitu [m] l č... Délka čela [m] k č... Koeficient prodloužení čel [-] b... Střední šířka cívky [m] B... Rovný úsek cívky [m] R... Odpor rotoru [Ω] ρ... Měrný odpor hliníku [Ωm] R... Odpor tyče rotoru [Ω] R... Odpor kruhu rotoru [Ω] R... Přepočítaný odpor na počet závitů [Ω] X... Rozptylová reaktance statoru [Ω] λ... Činitel rozptylu drážky [-] λ č... Činitel rozptylu čela [-] λ... Diferenční činitel rozptylu [-] k... Diferenční činitel [-] k... Činitel tvaru pole [-] X... Rozptylová reaktance rotoru [Ω] Δ... Činitel přepočtu proudu v kruhu na proud v tyči [-] X... Rozptylová reaktance přepočtená na fázi statoru [Ω] R... Odpor příčné větve náhradního schéma [Ω] X... Magnetizační reaktance [Ω] ΔP... Hlavní ztráty v železe statoru [W] Δp,... Měrné ztráty v železe [W/kg] k... Činitel uvažující vliv nerovnoměrnosti rozložení toku v magnetických částech obvodu [-] k... Činitel uvažující vliv technologie výroby statorového svazku [-] m... Hmotnost statorového jha [kg] m... Hmotnost zubů statoru [kg] ρfe... Hustota železa [kg/m ] 16
17 k... Vliv opracování plechů [-] B... Amplituda pulzací indukce ve vzduchové mezeře [T] B... Amplituda pulzací [T] β... Poměr otevření drážky rotoru ke vzduchové mezeře [-] β... Poměr otevření drážek statoru ke vzduchové mezeře [-] ΔP... Povrchové ztráty [W] ΔP... Povrchové ztráty ve statoru [W] ΔP... Povrchové ztráty v rotoru [W] Δp... Hustota povrchových ztrát ve statoru [W/m ] Δp... Hustota povrchových ztrát v rotoru [W/m ] ΔP... Pulzní ztráty [W] ΔP... Pulzace indukce v zubech statoru [W] B... Amplituda pulzací v zubech statoru [T] B... Amplituda pulzací v zubech rotoru [T] ΔP... Pulzace indukce v zubech rotoru [W] ΔP... Celkové ztráty v železe [W] ΔP... Joulovy ztráty ve vinutí [W] ΔP... Joulovy ztráty ve vinutí statoru [W] ΔP... Joulovy ztráty ve vinutí rotoru [W] ΔP... Mechanické ztráty způsobené třením v ložiskách a ventilační ztráty [W] K... Činitel plnění drážky [-] P... Přídavné ztráty [W] ΔP... Součet všech ztrát [W] K... Činitel respektující změnu odporu s teplotou [-] ΔT... Oteplení vnitřního povrchu statoru nad teplotu vzduchu okolí [ C] α... Součinitel přestupu tepla [W/m K ] k... Činitel respektující změnu odporu s teplotou [-] ΔP... Jouleovy ztráty v drážkové části rotoru [-] ΔT... Teplotní spád v izolaci drážkové části [ C] b... Tloušťka izolace [m] λ... Tepelná vodivost izolace [W/mK] λ... Ekvivalentní tepelná vodivost [-] 17
18 O... Obvod drážky [m] ΔT č... Teplotní spád v izolaci čela [ C] ΔP č... Jouleovy ztráty v čelech vinutí [W] ΔT č... Oteplení vnějšího povrchu čel nad teplotu vzduchu uvnitř stroje [ C] ΔT í... Střední oteplení statorového vinutí nad teplotu vzduchu uvnitř stroje [ C] ΔT... Oteplení vzduchu ve stroji nad teplotu okolí [ C] O ž... Obvod příčného řezu žeber [m] ΔT... Střední oteplení statorového vinutí nad teplotu okolí [ C] Q... Průtok vzduchu pro ventilaci [m /s] Q... Průtok vzduchu, který dodává vnější radiátor [m /s] 18

19 1 Asynchronní stroj Asynchronní stroje se provádějí ve dvou variantách. První variantou je asynchronní motor s kroužkovou kotvou. Druhou, asynchronní motor s klecí nakrátko. V této práci jsem se zaměřila především na asynchronní motory s klecí nakrátko. Konstrukční uspořádání asynchronních strojů Asynchronní stroj je nejčastěji používán jako motor, tyto motory mají široké použití v mnoha odvětvích, zejména v průmyslu. V této kapitole jsem popisovala základní rozdělení asynchronních motorů a jednotlivé konstrukční části, ze kterých se daný motor skládá. 1.1 Asynchronní motory s klecí nakrátko Stator asynchronního motoru s klecí nakrátko je tvořen elektrotechnickými izolovanými plechy s drážkami, ve kterých je uloženo vinutí. Na hřídeli je nalisován rotorový paket, který je také tvořen z elektrotechnických plechů. Klecový rotor je tvořen tyčemi, které jsou na koncích spojeny kruhy nakrátko. 1.2 Asynchronní motory s kroužkovou kotvou Konstrukce statoruam s kroužkovou kotvou je stejný jako u asynchronních strojů s klecí nakrátko. Rozdílnost konstrukce motoru s vinutým rotorem a klecí nakrátko je znázorněna na obrázku Obr. 1.2Porovnání konstrukce AM s klecovým a vinutým rotorem. Hlavní rozdíl je v tom, že u motorů s vinutou kotvou je vinutí uloženo i v rotorových drážkách, kde konce jednotlivých fází jsou vyvedeny na kroužky, na které dosedají uhlíkové sběrací kartáče. Rotorové vinutí pak může být spojeno s externími rezistory či tlumivkami.[6] Obr. 1.1 Rotor s kroužkovou kotvou 19


20 Obr Porovnání konstrukce AM s klecovým a vinutým rotorem 1.3 Klece asynchronních motorů Asynchronní motory mohou mít různé provedení rotorových klecí, které zajišťují zlepšení vlastností zejména při rozběhu motoru. Při rozběhu je problémem malý odpor rotorové klece s vysokým záběrným proudem a zároveň nízkým záběrným momentem. Použitím speciální rotorové klece, se uměle zvýší odpor, sníží se záběrný proud a tím se zvětší záběrný moment. [7] Obr Klec nakrátko a její části[] 20
21 1.3.1 Vírová klec Vírová klec je konstrukce s úzkými a hlubokými drážkami, především obdélníkového či lichoběžníkového průřezu. Tvary drážek jsou uvedeny na následujícím obrázkuobr Tvary drážek vírové klece, překresleno z [1] Obr Tvary drážek vírové klece, překresleno z [1] Princip vírové klece Při rozběhu motoru, kdy rotorová frekvence f 2 přibližně odpovídá statorové frekvenci f 1, vznikají značné vířivé proudy v rotorových tyčích. Tyto proudy vyvolává rozptylové pole, které prochází drážkami rotoru. Vířivé proudy se sčítají s rotorovým proudem a to má za důsledek rozložení proudové hustoty v rotorové tyči. V části tyče, nacházející se blíže ke vzduchové mezeře, se soustředí proud a tím vzrostou i elektrické ztráty. Tomu odpovídá zařazení dodatečných odporů do obvodu rotoru. Frekvence v rotoru se při rozběhu postupně snižuje a dochází i ke zmenšení vířivých proudů a nerovnoměrného rozložení proudu v tyči. Frekvence je malá a proudová hustota se rozloží rovnoměrně při jmenovitém zatížení motoru.[8] 21
22 1.3.2 Boucherotova klec (dvojitá klec) Boucherotovu klec tvoří vnější a vnitřní klec, proto se jí říká též dvojitá klec. Tyto klece mohou mít kruh nakrátko, který spojuje všechny tyče obou klecí dohromady, nebo dva kruhy, kdy každý kruh je pro jednu klec, tato varianta je používanější zejména proto, že klece mívají odlišný materiál. Na Obr Tvary drážek Boucherotovy klece, překresleno z [1] Tvary drážek Boucherotovy klece Obr Tvary drážek Boucherotovy klece, překresleno z [1] Vnější klec je rozběhová klec, která většinou mívá menší průřez tyčí než klec vnitřní, se vyrábí z materiálů, které mají větší měrný odpor (bronz, mosaz,...). Vnitřní klec je klec běhová, ta slouží pro snížení odporu a dělá se tedy většího průřezu. Pro výrobu této klece se používají materiály s dobrou měrnou vodivostí (měď, hliník, ) [1] Princip dvojité klece Při rozbíhání motoru, kdy rotorová frekvence se statorovou frekvencí jsou přibližně shodné, je reaktance vnitřní klece mnohem větší než reaktance vnější klece, proto proud protéká klecí s velkým odporem, což způsobuje snížení záběrného proudu a zvýšení záběrného momentu. Při snižování rotorové frekvence při rozběhu, začne proud rotoru přebírat klec vnitřní. Proudy v klecích se tedy rozdělují nepřímo úměrně jejich odporům. Vnitřní klecí bude protékat převážná část proudu, protože její tyče mají větší průměr a jejich materiál menší měrný odpor. [8] 22
23 2 Návrh asynchronního stroje Při návrhu asynchronního motoru jsemjako první musela zvolit hlavní rozměry stroje. Pro určení těchto rozměrů jsem vycházela z výkonové rovnice asynchronního stroje. Výkonová rovnice asynchronního stroje: S = C D l n (1) kde C je Essonův činitel: π C = 60 2 A B k (2) Zadané hodnoty pro výpočet Druh stroje: motor Výstupní výkon stroje P = 10 kw Napájecí napětí U = 230/400 V Počet fází m = 3 Frekvence f = 50 Hz Synchronní otáčky n = 1420 ot/min Krytí stroje proti vniku cizích těles a vody IP 44 Chlazení stroje IC Konstrukční provedení IM
24 Volba hlavních rozměrů stroje Hlavní rozměry asynchronních strojů se určují stejným způsobem jako u strojů synchronních. Nejdříve jsem tedy určila předběžné hodnoty obvodové proudové hustoty A [A/m], dále pak velikost magnetické indukce ve vzduchové mezeře B δ [T], předpokládanou účinnost stroje η [-], účiník cos ϕ [-] a následně i velikost vrtání statoru D 1 [m]. Při výpočtu jsem vycházela ze zadaných parametrů a odečítáním potřebných hodnot z daných tabulek a grafů. Při výpočtu jsem postupovala dle literatury [1], [2], [3] Počet pólových dvojic stroje p = f = n 1420 = 2 (3) Stanovení předběžné výšky osy stroje Předběžná výška stroje byla zvolena odečtením z grafu, na základě požadovaného výkonu P 2 h = 130 mm Obr. 2.1 Výška osy asynchronních motorů v závislosti na výkonu [1] 24
25 Vnější průměr statoru D = 0,225 m Vnější průměr statoru se určil s předdefinovaných hodnot uvedených v následující tabulce Tab. 2.II Tab. 2.IITabulka hodnot výšky os elektrických strojů a jim odpovídající vnější průměry statorových plechů asynchronních motorů h [mm] D e [m] 0,089 0,1 0,116 0,131 0,149 0,168 0,191 0,225 h [mm] D e [m] 0,272 0,313 0,349 0,392 0,437 0,530 0,590 0,660 Vnitřní průměr statoru Vnitřní průměr statoru D 1i [m] se obvykle určuje z vnějšího průměru statoru D 1e [m], výšky jha a výšky zubů statoru D = D 2(h + h ) (4) V nynějším stádiu výpočtu prozatím neznám rozměry h j1 a h d1, z tohoto důvodu jsem pro určení vnějšího průměru statoru použila empirického vztahu: D = K D = 0,66 0,225 = 0,1485 m (5) Koeficient K D, který charakterizuje poměr mezi vnitřním a vnějším průměrem, byl určen z následující tabulky Tab. 2.IV.Pro čtyřpólový stroj jsem stanovila koeficient K = 0,66 Tab. 2.IIITabulka doporučených hodnot koeficientu K D v závislosti na počtu pólů stroje 2p K D 0,52 0,57 0,62 0,68 0,70 0,72 0,74 0,75 0,75 0,77 Pólová rozteč stroje t = π D 2p = π 0, = 0,1166 m (6) 25
26 Vnitřní výkon stroje P = P k η cos(φ) = ,97 0,88 0,8 = 13778,409 W (7) Činitel k E, který určuje poměr mezi indukovaným napětím vinutí statoru k jmenovitému napětí, byl určen z následujícího grafu Obr. 2.2 k = 0,97 Obr. 2.2 Hodnoty činitele k E [1] Následně byla zvolena hodnota účinnosti η a účiníku cos ϕ, podle Obr. 2.3 cos φ = 0,8 η = 0,88 Obr. 2.3 Hodnoty cos φ a účinnosti [1] 26
27 Volba hodnot elektromagnetických zatížení Při volbě lineární proudové hustoty A [A/m] a magnetické indukce ve vzduchové mezeře B δ [T] bylo třeba hodnoty určit pečlivě, neboť určují délku stroje a ovlivňují i jeho vlastnosti. Hodnoty lineární proudové hustoty a magnetické indukce ve vzduchové mezeře byly odečteny z následujícího grafu Obr. 2.4, ve kterém jsou uvedeny doporučené hodnoty. Lineární proudová hustota A = A/m Magnetická indukce ve vzduchové mezeře B = 0,88 T Obr. 2.4 Doporučené hodnoty lineární proudové hustoty a magnetické indukce ve vzduchové mezeře[1] V tomto kroku bylo také důležité stanovit předběžné hodnoty činitele pólového krytí α δ, činitele tvaru pole k β a činitele statorového vinutí k v1, potřebné pro další výpočty. Činitel pólového krytí (předběžná hodnota) α = 2 π = 0,637 (8) Činitel tvaru pole (předběžná hodnota) k = π 2 2 = 1,11 (9) 27
28 Činitel statorového vinutí Pro 2p = 4 a jednovrstvé vinutí se činitel k v1 volí v rozmezí hodnot 0,95 0,96. Zvolila jsem hodnotu k = 0,95 Synchronní úhlová rychlost ω = 2 π f p = 2 π 50 2 Ideální délka vzduchové mezery l = = 148,70 rad s 2 P D ω k k A B π α = (10) (11) l = ,41 0, ,7 1,11 0, ,88 π 0,637 = l = 0,127 m Štíhlostní poměr λ = l t = 0,127 0,116 = 1,088 (12) 28
29 Výpočet statoru Určení počtu drážek statoru Pro správné určení počtu statorových drážek, bylo potřeba určit minimální a maximální počet statorových drážek. Výpočtem bylo třeba nejdříve určit minimální a maximální hodnotu drážkové rozteče. Tujsem následně použila v rovnicích pro stanovení počtu drážek. Výsledný počet drážek jsem určila z rozpětí těchto dvou hodnot takovým způsobem, aby výsledný počet drážek i počet drážek na pól a fázi bylo číslo celé. Minimální a maximální drážková rozteč Maximální a minimální hodnota drážkové rozteče se určila z obrázku Obr. 2.5, ve kterém pro zadaný stroj odpovídá oblast 2 Obr. 2.5 Drážkové rozteče statoru asynchronních motorů [1] Minimální drážková rozteč t d1 min Maximální drážková rozteč t d1 max = 0, 011 m = 0, 013 m Minimální počet statorových drážek Q = π D π 0,1485 = = 35,88 (13) t 0,013 Maximální počet statorových drážek Q = π D π 0,1485 = = 41,29 (14) t 0,
30 Počet drážek na pól a fázi q = Q m 2p = = 3 (15) Po dosazení počtu drážek do vzorce pro počet drážek na pól a fázi (15), vyšlo celé číslo. Z toho tedy vyplívá, že zvolený počet drážek byl vyhovující oběma stanoveným podmínkám. Výsledný počet statorových drážekq 1 = 36 Drážková rozteč statoru t = π D π 0,1485 = 2 p m = 0,01295m (16) Jmenovitý proud vinutí statoru I = P m U η cos(φ) = ,88 0,8 = 20,59 A (17) Počet vodičů v drážce Předběžný počet efektivních vodičů v drážce V = π D A π 0, = = 16,366 I Q 20, (18) Výsledný počet efektivních vodičů jsem určila ze vzorce V = a V = 1 16,366 = 16, vodičů (19) Protože byl počet paralelních větví a = 1, vyšel i skutečný počet efektivních vodičů v drážce shodný s předběžným počtem efektivních vodičů. Výsledný počet vodičů jsem zaokrouhlila na celé číslo. Počet závitů statorového vinutí N = V Q 2 m = = 96 závitů (20) Počet drážek Q = 2p q m = = 36 drážek (21) 30
31 Počet cívek K = Q 1 = 36 1 = 36 cívek (22) Přední cívkový krok v počtu drážek na pól y = Q 2p = 36 4 = 9 drážek (23) Počet fázových svazků S = m a = 6 1 = 6 svazků (24) Počet fázových svazků na fázi f = S m a = m m = = 2 svazky (25) Počet cívek ve svazku K = K m a = = 6 cívek (26) Skutečná lineární proudová hustota A = 2 m N I ,586 = = A/m π D π 0,1485 (27) Poměrné zkrácení kroku β = 2 3 q + 1 q = = 0,888 (28) Činitel kroku β π π k = sin = sin 0,888 = 0, (29) Činitel rozlohy k = sin q sin = sin 3 sin = 0,9598 (30) 31
32 Činitel vinutí k = k k = 0,9848 0,9598 = 0,9451 (31) Magnetický tok Φ = k U 4,44 k N f k = (32) Φ = 0, = 0,00997 Wb 4,44 1, ,9452 Skutečná hodnota magnetické indukce ve vzduchové mezeře B = p Φ = 2 0,00997 D l 0,1485 0,127 = 0,866 T (33) Proudová hustota ve statorovém vinutí Předběžná proudová hustota Oteplení drážkové části vinutí, závisí na součinu lineární hustoty proudu a hustoty proudu ve vinutí, proto se předběžná proudová hustota určila z tzv. A-J kritéria dle Obr. 2.6 AJ = A /m Předběžná proudová hustota Obr. 2.6 A-J kritérium J = AJ A = = 7,48 10 A/m (34) Předběžný průřez efektivního vodiče S = I a J = 20, ,48 10 = 2,75 10 m (35) Počet dílčích vodičů n = 2 vodiče 32
33 Průřez jednotlivého vodiče S = S n 2,75 10 = 2 = 1,37 10 m (36) Pro vsypávané vinutí se používají měděné dráty do průměru 1,4 mm, proto jsem z tabulky zvolila nejbližší průřez vodiče: S v =1,369 mm odečteno z tab. D3.1 str 651[1] průměr vodiče d v =1,32 mm d vi =1,415 mm, pro izolace tereftalátovým lakem Skutečná proudová hustota J = I n S a = 20, , = 7,52 10 A/m (37) 2.1 Výpočet rozměrů drážek a zubů statoru Činitel plnění železa k = 0,97 Šířka zubu statoru b = B t 0,866 0,0129 = = 0,00573 m B k 1,8 0,97 (38) výška zubu statoru h = h (0,1 b ) = 0,00998 (0,1 0,01068) = 0,00892 (39) výška statorového jha Φ 0,00997 h = = 2 B l k 2 1,6 0,127 0,97 = 0,01846 m (40) hloubka drážky h = D D 2 h = 0,225 0,1485 0,01846 = 0,01979 m 2 (41) 33
34 šířka dna drážky b = π (D + 2h ) π (0, ,01979) b Q = 0,00572 = 36 (42) b = 0,01068 m šířka vrcholu drážky b = π (D + 2h b ) Q b Q π = (43) b = π (0, , ,001) 36 0, π b = 0,00792 m aktivní hloubka drážky h = h h + b b = 2 (44) h = 0,0199 0,5 10 0, , = 0,00998 m 2 činitel plnění drážky K = d V n S = (1,42 10 ) , = 0,728 (45) Velikost vzduchové mezery δ = (0,3 + 1,5 D ) 10 = (0,3 + 1,5 0,1485) 10 = (46) δ = 0, m 0,5 mm Vzduchová mezera zvolena z doporučeného rozmezí hodnot na δ = 0,5 mm 34
35 2.2 Výpočet rotoru Při výpočtu rotorových veličin, bylo třeba nejdříve určit magnetické indukce v rotorovém jhu a v zubech rotoru. Tyto hodnoty se odečetly z tabulky 6.10, strana 213 [1] Indukce ve jhu rotoru B = 1 T Indukce v zubech rotoru B = 1,7 T Indukce zubu v nejužším průřezu rotoru B = 1,6 T Vnější průměr rotoru D = D 2δ = 0, = 0,1475 m (47) Vnitřní průměr rotoru D = D k = 0,1475 0,23 = 0,0339 m (48) Délka rotoru l = l = 0, 127 m Počet rotorových drážek Q = 26 drážek Počet drážek na rotoru se určí dle doporučených hodnot,tabulka6.15, strana 227 [1] Drážková rozteč rotoru t = π D π 0,1475 = = 0, m Q 26 (49) Činitel přepočtu proudů p = 2 m N k ,9452 = = 20,94 Q 26 (50) Proud v tyči I = k p I = 0,85 20,94 20,586 = 366,417A (51) 35
36 Proudová hustota v tyči rotoru J = 3,5 10 A/m Tato hodnota proudové hustoty v tyči byla zvolena na základě toho, že hustota proudu v tyčích rotoru u strojů zavřených s ofukováním na povrchu a s odlévaným hliníkovým vinutím se volí v rozmezí (2,5 3,5) 10 A/m [1] Průřez tyče S = I J = 366,417 3,5 10 = 1,05 10 m (52) Proud v kruhu nakrátko I I = 2 sin = 366,417 2 sin, = 765,55 A (53) Proudová hustota v kruhu Proudovou hustotu v kruhu volíme o 15% menší než v tyči, tedy: Průřez kruhu J = 2,98 10 A m S = I = 765,55 = 0, m J 2,98 10 (54) Rozměry kruhu nakrátko a = 1,4 h = 1,4 0,0272 = 0,0381 m (55) b = S a = 0, ,0381 = 0,00675 m (56) Výška rotorového jha h = Φ 0,00997 = 2 B l k 2 1 0,127 0,97 = 0,02954 m (57) 36
37 Šířka zubu rotoru b = B t 0,866 0,01782 = = 0,00834 m B k 1,7 0,97 (58) Šířka drážky pod krčkem b = π (D 2h ) Q b π + Q = (59) b = π (0, ,005) 26 0,00834 π + 26 = 0,00828 m Šířka drážky u dna b = b + 4 S = (60) b = 0, ,05 10 = 0,00619 m Hloubka rotorové drážky h = D D 2 h = 0,1475 0,0339 0,02954 = 0,0273 m 2 (61) 2.3 Magnetický obvod Magnetická indukce v zubech statoru B = B t l 0,866 0, ,127 = b l k 0, ,127 0,97 = 1,8 T (62) Magnetická indukce v zubech rotoru B = B t l b l k = 0,866 0, ,127 0, ,127 0,97 = 1,7 T (63) 37
38 Magnetická indukce ve jhu statoru B = Φ 0,00997 = 2 h l k 2 0, ,127 0,97 = 1,6 T (64) Magnetická indukce ve jhu rotoru B = Φ 0,00997 = 2 h l k 2 0, ,127 0,97 = 1,3 T (65) Carterův činitel k = t t δ = 0, ,01295,,,, 0,0005 = (66) k = 1,0225 Magnetické napětí vzduchové mezery U = 2 μ B δ k = 2 4π 10 0,866 0,5 10 1,0225 (67) U = 627,87 A Magnetické napětí zubu statoru U = 2 h H = 2 0, = 174,1735 A (68) Magnetické napětí zubu rotoru U = 2 h H = 2 0, = 78,4784 A (69) Činitel nasycení zubů k = 1 + U + U 174, ,4784 = 1 + = 1,402 U 627,87 (70) Hodnota činitele nasycení zubů vyhovuje doporučenému rozmezí 1,2-1,5 38
39 Střední délka indukční čáry ve jhu statoru L = π(d h ) 2p = π(0,225 0,01846) 4 = 0,1806 m (71) Magnetické napětí jha statoru U = L H = 0, = 361,35 A (72) Střední délka indukční čáry ve jhu rotoru L = π(d + h ) 2p = π(0, ,02954) 4 = 0,0793 m (73) Výška jha rotoru h = D D 2 h = 0,1475 0,0339 0,0273 = 0, (74) Magnetické napětí jha rotoru U = L H = 0, = 102,388 A (75) Magnetické napětí na jednu pólovou dvojici U = U + U + U + U + U = (76) U = 627, , , , ,4784 = U = 1344,26 A Činitel nasycení magnetického obvodu k = U U = 1344,26 624,8728 = 2,15 (77) Magnetizační proud I = p U ,26 = 0,9 m N k 0, ,9452 = 10,97 A (78) 39
40 Poměrná hodnota magnetizačního proudu i = I I = 10,97 20,586 = 0,53 A (79) 2.4 Výpočet prvků náhradního schéma Střední šířka cívky b = π(d + h ) 2p = π(0, ,01979) 4 = 0,1321m (80) Délka drážkové části l = l = 0,127 m (81) Délka čela cívky l č = K č b + 2 B = 1,30 0, ,01 = 0,191 m (82) Činitel K č byl odečten z tabulky Tab. 0.II, K č = 1,30 Délka přímé části cívky, při výstupu z drážky od čela statorového svazku do začátku ohybu čela, se u vsypávaných vinutí bere B = 0,01 Tab. 0.IITabulka hodnot k výpočtu čel vsypávaného vinutí cívky statoru čela neizolovaná počet pólů K č K v 2 1,20 0,26 4 1,30 0,40 6 1,40 0,50 8 1,50 0,50 Vyložení čel statorového vinutí l = K b + B = 0,40 0, ,01 = 0,06 m (83) Činitel Kv byl odečten z tabulky Tab. 0.II, K = 0,40 40
41 Střední délka závitu l = 2 (l + l č ) = 2 (0, ,191) = 0,636 m (84) Délka vodičů jedné fáze statorového vinutí L = N l = 96 0,636 = 61,056 m (85) Odpor jedné fáze statorového vinutí R = ρ L = 1 a S 41 61, , = 1,087 Ω (86) Poměrná hodnota statorového odporu r = R I U = 1,087 20, = 0,097 (87) Odpor tyče rotorového vinutí R = ρ l = 1 S 20,5 0, ,05 10 = 5,9 10 Ω (88) Odpor kruhu nakrátko R = ρ π D = 1 Q S 20,5 π 0, , = 2,51 10 Ω (89) Odpor fáze rotorového vinutí R = R + 2 R Δ = 5, , ,4786 = 8, Ω (90) Odpor fáze rotoru přepočtený na počet závitů statoru R = R 4 m (N k ) Q = (91) (96 R = 8, ,9452) 4 3 = 0,310 Ω 26 41
42 Poměrná hodnota přepočteného odporu r = R I U = 0,307 20, = 0,0275 (92) Činitel k β k = 0, k = 0,25 ( ,91) = 0,9325 (93) Činitel k β k = 0,25 (1 + 3 β) = 0,25 ( ,88) = 0,91 (94) Činitel magnetické vodivosti v drážce λ = h k 3b + h + 3h + h k b b + 2b b (95) λ = 0, ,4 10 0, , ,0079 0,0079 0, , ,0005 0,91 = 0,001 λ = 1,578 Kde část klínu zasahující do prostoru drážky je h = 0,6 mm, h = 2,4 mm Činitel magnetické vodivosti čel λ č = 0,34 q l l č 0,64βt = (96) λ č = 0,34 3 (0,191 0,64 0,88 0,1166 ) = 1,01 0,127 Činitel magnetické vodivosti diferenčního rozptylu λ = t 0,01295 ξ = 12δ k 12 0,0005 1,0225 2,59 = 5,467 (97) ξ = 2k k k t = t (98) ξ = 2 1,4 0,9325 0,9452 0, ,1295 = 2,59 k =1,4, hodnota stanovena z obr.0,7 42
43 Obr. 0.7 činitel k [1] Rozptylová reaktance fáze statorového vinutí X = 15,8 f 100 N 100 l p q λ + λ č + λ = (99) X = 15, X = 1,087 Ω Poměrná hodnota rozptylové reaktance 0,127 (1, ,01 + 5,467) = 2 3 x = X I U = 1,241 20, = 0,111 (100) Činitel magnetické vodivosti drážky rotorového vinutí λ = h 3b π b 1 + 0,66 b 8S 2b k + h = b (101) λ = 0,00864 π 0, , , ,66 0,001 0, , ,001 = λ = 5,40 Činitel magnetické vodivosti čel rotorového vinutí λ č = 2,3 D Q l Δ log 4,7 D a + b = (102) λ č = 2,3 0, ,127 0,4786 log 4,7 0,1093 0, ,00674 = 0,228 43
44 Činitel magnetické vodivosti diferenčního rozptylu rotoru λ = t 0,01782 ξ = 12δ k 12 0,0005 1,0225 (1 0,06) = 2,73 (103) Pokud 10 je možné s dostatečnou přesností předpokládat ξ = 1 Δ Kde Δ =0,06, odečteno Obr.0,8 Obr. 0.8 činitel Δ [1] Celkový činitel magnetické vodivosti rotorového vinutí λ = λ + λ č + λ = 1, , ,73 = 4,536 (104) Rozptylová reaktance fáze rotorového vinutí X = 7,9 f l λ 10 = 7,9 50 0,127 4, = (105) X = 2, Ω Přepočítaná rozptylová reaktance rotorového vinutí X = X 4 m (N k ) Q = (106) X (96 = 2, ,9452) 4 3 = 0,8647 Ω 26 44
45 Poměrná hodnota rozptylové reaktance rotorového vinutí x = X I U = 0, , = 0,0774 (107) 2.5 Výpočet ztrát Hmotnost jha statoru m = π (D h ) h l k ρ = (108) m = π (0,225 0,01846) 0, ,127 0, = m = 11,51 kg Hustota oceli ρ = 7800 kg/m Hmotnost zubů statoru m = h b Q l ρ k ρ = (109) m = 0, , ,127 0, = 1,767 kg Hlavní ztráty v železe ΔP = Δp, f 50 k B m + k B m = (110) ΔP = 1, , (1,6 1,6 11,51 + 1,8 1,767) = 91,92 W Kde činitele uvažující vliv nerovnoměrnosti rozložení toku v částech magnetického obvodu a vliv technologie výroby statorového svazku k = 1,6 a k = 1,8 Tab. 0.ITabulka hodnot k výpočtu čel vsypávaného vinutí elektrotechnická ocel třídy tloušťka plechů (mm) Δp 1,0/50 (W/kg) β 2013, 2011, ,5 2,5 2,6 1,5 GOST ,5 1,75 1, ,5 1,6 1,3 45
46 Pulzující indukce ve vzduchové mezeře nad hlavami zubů statoru B = β k B = 0,12 1,0225 0,866 = 0,106 T (111) kde β = 0,12, odečteno z Obr. 0.9 Obr. 0.9graf hodnot proβ, β [1] Hustota povrchových ztrát statoru p = 0,5 k Q n 10000, (B t 10 ) = (112), p = 0,5 1, (0,106 0, ) = p = 23,418 W/m k = 1,7 2,0 zvoleno 1,85 Povrchové ztráty v statoru ΔP = p (t b ) Q l = (113) ΔP = 23,418 (0, ,001) 36 0,127 = 1,279 W Pulzující indukce ve vzduchové mezeře nad hlavami zubů rotoru B = β k B = 0,12 1,0225 0,866 = 0,106 T (114) Kde β = 0,12, odečteno z Obr
47 Hustota povrchových ztrát rotoru p = 0,5 k Q n 10000, (B t 10 ) = (115), p = 0,5 1, (0,106 0, ) = p = 20,145 W/m k = 1,7 2,0 zvoleno 1,85 Povrchové ztráty v rotoru ΔP = p (t b ) Q l = (116) ΔP = 20,145 (0, ,001) 26 0,127 = 1,118 W Hmotnost zubů rotoru m = h b Q l ρ k = (117) m = 0, , , ,97 = 1,67 kg Indukce pulzací ve středním průřezu zubu statoru B = γ δ 0,571 0,0005 B 2 t = 2 0, ,8 = 0,0198 T (118) γ = 5 + =,, 5 +, = 0,571, (119) Pulzní ztráty v zubech statoru ΔP = 0,11 Q n 1000 B m = (120) ΔP = 0, ,0198 1,767 = 0,104 W 47
48 Indukce pulzací ve středním průřezu zubu rotoru B = γ δ 0,571 0,0005 B 2 t = 2 0, ,7 = 0,0136 T (121) γ = 5 + =,, = 0, ,, (122) Pulzní ztráty v zubech rotoru ΔP = 0,11 Q n 1000 B m = (123) ΔP = 0, ,0136 1,67 = 0,0887 W Dodatečné ztráty v železe ΔP = ΔP + ΔP + ΔP + ΔP = (124) ΔP = 1, , , ,0887 = 2,589 W Celkové ztráty v železe ΔP = ΔP + ΔP = 91,92 + 2,589 = 94,51 W (125) Mechanické ztráty a ventilační ztráty ΔP = K n 1000 (10 D ) = (126) ΔP = 6 (10 0,225) = 137,81 W Kde K = 6 pro 2p 4 ΔP = ΔP + ΔP + ΔP = (127) ΔP = 94, , ,81= = 1614,28 W 48
49 Přídavné ztráty ΔP ří = 0,5% ΔP = 0, ,25 = 8,07 W (128) Dodatečné ztráty ΔP = 0,005 P η = 0, ,88 = 56,82 W (129) Elektrické ztráty ve všech fázích vinutí statoru ΔP = m R I = 3 1,087 20,586 = 1381,96 W (130) Elektrické ztráty v klecovém vinutí rotoru nakrátko ΔP = m R I = 26 8, ,417 = 282,48 W (131) Elektrické ztráty statoru při chodu naprázdno ΔP = 3 R I = 3 1,087 10,97 = 392,43 W (132) Celkové ztráty ΔP = ΔP + ΔP + ΔP + ΔP ří + ΔP = (133) ΔP = 94, , ,96 + 8, ,81 = 1904,83 W Účinnost, výpočet z celkových ztrát η = 1 ΔP P = , = 0,862 (134) Činný proud naprázdno I = I č + I = 0, ,97 = 11,01 A (135) I č = ΔP + ΔP + ΔP 94, , ,43 = = 0,91 A m U (136) 49
50 Účiník naprázdno cos φ = I č I = 0,91 11,01 = 0,0827 (137) 2.6 Zatěžovací charakteristiky Odpor příčné větve dle náhradního schéma R = ΔP m I = 137, ,97 = 0,382 Ω (138) Reaktance příčné větve dle náhradního schéma X = U I X = ,97 1,241 = 19,725 Ω (139) Činitel γ γ = tan R X R X R (R + R ) + X (X + X ) = (140) γ = tan 1,087 19,725 0,382 1,241 0,382 (1, ,382) + 19,725 (1, ,725) = γ = 0,051 = 0 3 2,12 < 1 Činitel rozptylu c = 1 + X X = 1 + 1,241 19,725 = 1,06 (141) Jmenovitý skluz s = R + I U = 0, , = 0,02775 (142) Tabulka hodnot pro zatěžovací charakteristiky je uvedena v příloze D 50
51 2.7 Tepelný výpočet Elektrické ztráty ve vinutí statoru se dělí na ztráty v drážkách ΔP a ztráty v čelech cívek ΔP č Elektrické ztráty v drážkách ΔP = k ΔP 2 l l = 1, ,96 2 0,127 0,636 = 590,55 W (143) Činitel zvýšení ztrát pro izolaci třídy F k = ρ ρ = 1,07 Elektrické ztráty v čelech cívek ΔP č = k ΔP 2 l č l = 1, ,96 2 0,191 0,636 = 888,148 W (144) Oteplení vnitřního povrchu statorového svazku nad teplotu vzduchu uvnitř stroje T = K P + P 590, ,51 = 0,20 π D l α π 0,225 0, = (145) T = 14,54 C K je činitel respektující, že část ztrát v železe statoru a v drážkové části vinutí se předává kostrou přímo do okolního prostředí,k = 0,20, činitel odečten z tabulky Tab. 0.I α je součinitel přestupu tepla z povrchu α = 105 W/m K Obr. 0.10součinitel přestupu tepla [1] 51
52 Tab. 0.IITabulka hodnot k výpočtu čel vsypávaného vinutí počet pólů motoru 2p krytí IP 44 0,22 0,20 0,19 0,18 0,17 0,16 Teplotní spád v izolaci drážkové části T = P b + b + b Q O l λ 16 λ = (146) T = T = 2,88 C 590, , ,058 0,127 0,16 0, ,00792 = 16 1,05 b = 0,30 mm λ = 0,16 W/mK λ = 1,05 W/mK Výpočtový obvod statorové drážky O = 2h + b + b = 2 0, , ,00792 = (147) O = 0,058 m Teplotní spád na tloušťce izolace čel T č = P č 2 Q O č l č b č λ + h 12 λ = (148) 590,55 = ,058 0, ,16 + 0,01979 = 1,16 C 12 1,05 O č = O = 0,058 m b č = 0, neizolovaná čela vinutí λ = 0,16 W/mK λ = 1,05 W/mK 52
53 Oteplení vnějšího povrchu čel nad teplotu vzduchu uvnitř stroje T č = K P č 590,55 = 0,2 2 π D α l 2 π 0, ,06 = (149) T č = 20,09 C Střední oteplení statorového vinutí nad teplotu vzduchu uvnitř stroje T = ( T + T ) 2 l l + T č + T č 2 l č l = (150) (14,54 + 2,88) 2 0,127 T = 0,636 T = 22,19 C (1, ,09) 2 0,191 + = 0,636 Součet ztrát P = P + k 1 ΔP + ΔP = (151) P = 3827,29 + (1,07 1) (1381, ,48 ) = P = 3943,8 W Součet všech ztrát odváděných do vzduchu uvnitř stroje P = P (1 K) ΔP + ΔP 0,9 ΔP = (152) P = 3943,8 (1 0,2) (590, ,92 ) 0,9 137,81 = P = 3273,79 W Ekvivalentní ochlazovací povrch tělesa stroje S ě = (π D + 8 O ž ) (l + 2l ) = (153) S ě = (π 0, ,24) (0, ,06) = 0,648 m Obvod příčného řezu žeber O ž = 0,24 m 53
54 Obr. 0.11obvod příčného řezu žeber[1] Oteplení vzduchu ve stroji nad teplotu okolí T = ΔP S ě α = 3273,79 0, = 48,11 C (154) Střední oteplení statorového vinutí nad teplotu okolí T = T + T = 22, ,11 = 70,3 C (155) 54
55 2.8 Výpočet ventilace Činitel uvažující změnu chladících podmínek po délce povrchu kostry ofukované vnějším ventilátorem k = m n 100 D = 1, (156) 0,225 = 3, m = 1,8 pro motory s 2p 4 Potřebný průtok vzduchu pro ventilaci Q = k P 3, ,79 = 1100 T ,11 = 0,199 m /s (157) Průtok vzduchu, který dodává vnější ventilátor Q = 0,1 m n 100 D = 0,1 3, ,225 = (158) Q = 0,227 m /s m = 3,15 pro motory s 2p 4 55
 je vhodné k řešení použít numerické metody.")
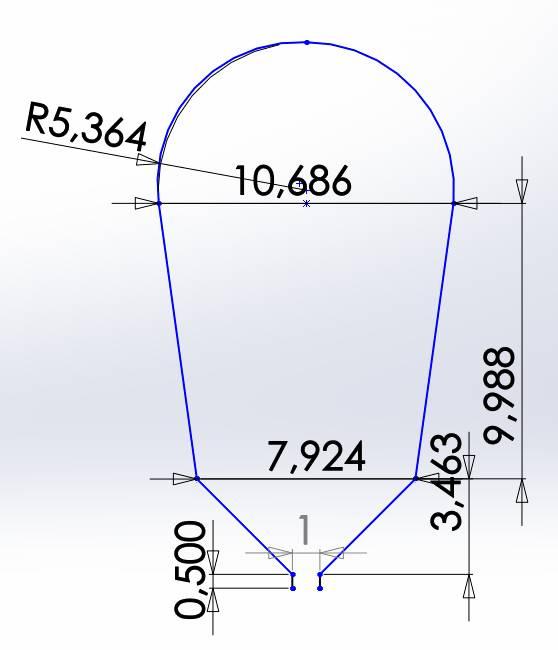
56 3 Ověření návrhu pomocí metody konečných prvků Protože ve většině analýz elektrických či magnetických polí se vyskytují různé faktory, které mohou ovlivňovat výsledky (např.: použití materiálů, které mají nelineární charakteristiky, složité uspořádání prvků či okrajové podmínky apod.) je vhodné k řešení použít numerické metody. Metoda konečných prvků se používá především pro kontrolu a ověřování stanovených hodnot a vlastností, které již byly určeny pro daný model analytickým výpočtem. Tato metoda je numerickou metodou, která využívá toho, že danou oblast rozloží na konečný počet prvků. Praktický výpočet pak probíhá tak, že se vytvoří geometrický model tělesa, který se spojitě rozdělí na prvky konečných rozměrů. Základním prvkem je trojúhelník, kde rohy tohoto prvku jsou uzlovými body, ke kterým se vytváří daná síť, jejíž hustota pak ovlivňuje přesnost výsledků. [4] V následující části práce bylo popsáno modelování stroje pomocí metody konečných prvků v programu FEMM 4.2. Postup modelování stroje Nejdříve jsem nakreslila rozměrový výkres motoru, který jsem poté ve formátu dxf. importovala do prostředí programu FEMM. Výkres jsem vytvořila v programu Solidworks 2015, protože FEMM má pouze základní funkce pro kreslení daných objektů a bylo by náročné v něm výkres vytvořit. Definování problému Po spuštění programu FEMM bylo nutné si z nabízených problémů vybrat ten, který jsem chtěla řešit, v mém případě magnetický problém. V následujícím kroku bylo nutné nadefinovat problém. Volba Problem Type určuje, jak vypadá daný 2D model ve 3D prostoru, kdy Planar určuje to, že se model pouze protáhne do hloubky, kteroujsem zadala do kolonky Depth. Ve třetí kolonce Frequency (Hz) bylo třeba nastavit jednotlivé frekvence, které odpovídaly skluzům v rozmezí 0 až 1, kdy s = 0 stav naprázdno a s = 1 stav nakrátko Obr. 3.1 Definování problému 56

57 Nastavení vlastností jednotlivých ploch V další fázi bylo potřeba určit materiálové vlastnosti jednotlivých částí modelu. FEMM obsahuje knihovnu s již předdefinovanými materiály. Dal se tedy vybrat materiál z této nabízené knihovny, či si přidat svůj vlastní, dle potřeby. Nastavení materiálu jsem provedla v záložce Properties Material Library, čímž jsem se dostala do knihovny materiálů, kde jsem našla potřebné materiály a přetáhla je do okénka vpravo. Nyní už jsem jen přiřadila jednotlivý materiál pro statorové/rotorové drážky, vzduchovou mezeru, magnetický obvod a hřídel.model s přiřazenými materiálovými vlastnostmi, nadefinovanými proudy a se sítí pro výpočet, byl pro ilustraci uveden na následujícím obr.obr. 3.2 Nastavení materiálových vlastností. Pouze pro dané plechy M36, tvořící magnetický obvod jsem použila nelineární B- H charakteristiku, pro získání přesnějších výsledků. Charakteristika plechů byla načtena z textového souboru. Nastavení materiálových vlastností pro plechy je zobrazeno na OBR Obr. 3.3 Nastavení materiálových vlastností. Průběh B-H charakteristiky jsem pak znázornila Obr B-H charakteristika použitých plechů M36 Obr. 3.2Nastavení materiálových vlastností 57

58 Nelinerání charakteristika plechů: Obr. 3.3 B-H charakteristika použitých plechů M36 Zasíťovaný model, připravený k simulaci: Obr. 3.4 Zasíťovaný model s nadefinovanými vlastnostmi 58

59 Získání jednotlivých hodnot pro výpočet Po správném nastavení všech parametrů jsem spustila vykreslení sítě modelu, kde jsem zjemnila síť v důležitých částech, tedy především ve vzduchové mezeře. Zjemněné zasíťování je možné vidět na Obr. 3.4 Zasíťovaný model s nadefinovanými vlastnostmi. Bylo potřeba ovšem myslet na to, že čím jemnější síť, tím delší bude doba výpočtu. Tento krok byl důležitý, protože jsem musela provést opakované simulace pro všechny skluzy a jim odpovídající hodnoty proudů. Při zadávání hodnot proudů je třeba dbát na to, aby hodnoty byly, co možná nejpřesnější z toho důvodu, že i malé odchylky způsobují velké rozdíly od původních výsledků. Výslednou velikost momentu odpovídající jednotlivým skluzům jsem získala změřením na integrační cestě, uprostřed vzduchové mezery, kam jsem pro tyto účely dokreslila kružnici. Obr. 3.5Rozložení magnetické indukce motoru, pro stav naprázdno s=0 59
60 Stanovení parametrů náhradního schéma Pro výpočet parametrů náhradního schématu jsem čerpala z literatury [5] 3.1 Stanovení magnetizační reaktance X μ Magnetizační reaktanci jsem určila ze stavu naprázdno, tedy pro s = 0. Energii magnetického pole jsem získala pomocí integrálu přes plochu magnetického obvodu (Magnetic field energy) Energie magnetického pole W = 6,3681 J Energie magnetického pole přepočtená na jednu fázi W = W m = 6,3681 = 2,21227 J 3 (159) Vztah pro magnetickou indukčnost L = 2W I = 2 2, ,20 = 0,0408 H (160) Výsledná magnetizační reaktance X = ω L = 2π f L = 2π 50 0,0408 = 12,819 Ω (161) 3.2 Stanovení odporu respektujícího ztráty v železe R Fe Nejprve bylo nutné stanovit ztráty v železe, to jsem provedla pomocí integrálu přes plochu železa. (Hysteresis, Total losses).následně bylo nutné určit činnou složku proudu naprázdno I oč. Ztráty v železe P = 16,9 W R = P m I č = 16,9 3 1,2869 = 3,4 Ω (162) 60
61 3.3 Stanovení statorového odporu R 1 Pro stanovení odporu drážky, bylo třeba zjistit ztráty v drážce. (Resistive losses) Toto měření jsem prováděla pro stav nakrátko, kdy skluz s = 1. P = 57,0846 W Odpor statorové drážky R = P I = 57, ,59 = 0,1346 Ω (163) Výsledný statorový odpor R = R Q m = 0, = 1,615 Ω (164) 3.4 Stanovení rozptylové reaktance X 1σ V prvním kroku bylo třeba odečíst magnetickou energii statorové drážky pomocí integrálu přes plochu drážky (Magnetic field energy) Energie magnetického pole v drážce W = 0,46937 J Energie magnetického pole v drážce přepočtená na jednu fázi Vztah pro magnetickou indukčnost L = 2W I = 2 0, ,59 = 2, H (165) Výsledná magnetizační reaktance X = ω L = 148,7 2, = 0,6955 Ω (166) 3.5 Stanovení rozptylové reaktance X 2σ Pro stanovení rozptylové reaktance bylo třeba stanovit magnetickou energii rotorové tyče Energie magnetického pole v tyči W = 0, J 61
62 L = 2W I = 2 0, ,42 = 2, H (167) Reaktance rotorové tyče X = ω L = 148,7 2, = 4,26 10 Ω (168) Výsledná rozptylová reaktance X = p X κ = , = 0,825 Ω (169) Kde κ je největší společný dělitel počtu drážek a pólových dvojic a p je impedanční převod motoru 3.6 Stanovení rotorového odporu R 2 Ztráty v rotorové tyči P = 184, 968 W Odpor tyče přepočítaný na jednu fázi R = P I = 2 184, ,42 = 1, H (170) Rotorový odpor R = R κ = 1, = 6,88 10 Ω (171) Výsledný odpor R = p R = ,88 10 = 2,66 Ω (172) 62
63 Závěr Cílem této diplomové práce bylo vytvořit elektromagnetický návrh čtyřpólového asynchronního motoru s klecí nakrátko o výkonu 10kW.Nejprve byly určeny hlavní rozměry stroje, stator o vnějším průměru D 1e = 225 mm a vnitřním průměru vrtání D 1i = 148,5 mm a 36 drážkami, protože je stroj menších rozměrů pro výkon P = 10 kw postačilo jednovstvé vsypávané vinutí. Ideální délka stroje l Fe =127mm a vzduchvá mezera δ= 5 mm. Vnější průměr rotoru D 2e =148,5 mm, vnitřní průměr rotoru D 2i =33,93 mm.účinnost motoru jsem stanovila z vypočtených ztrát, kdy η = 86,2 %, hodnota se od původní odhadované hodnoty 88% liší jen nepatrně. Indukce ve vzduchové mezeře B δ = 0,866 T se od předběžné hodnoty B δ =0,88 T, také téměř neliší. Při výpočtu byl použit především zrdoj literatury [1], pro tepelný výpočet a zatížení stroje,pak doplněn literaturou [2] a [3]. V následujícím kroku byly tyto hodnoty získané výpočtem ověřeny metodou konečných prvků v programu FEMM 4.2 pomocí simulací modelu, pro různé frekvence odpovídající daným skluzům. Z této simulace byly vyneseny hodnoty momentové charakteristiky. V následující tabulcetab. 0.I, jsem srovnala momenty získané jednotlivými metodami. Tab. 0.IITabulka hodnot k výpočtu čel vsypávaného vinutí Vzniklý rozdíl mezi jednotlivými metodami, je způsobený především nepřesností hodnot zadávaných proudů, protože odchylka několik desetin ampérů, již velice ovlivňuje výsledné hodnoty momentu v řádech desítek. Dalším bodem bylo srovnání parametrů náhradního schématu získaných výpočtem a dopočtených pomocí simulací z FEMMu. Postup získání hodnot byl popsán v třetí kapitole. Při výpotu hodnot ze simulací jsem čerpala z literatury [5]. Získané hodnoty pro srovnání parametrů náhradního schéma jsou uvedeny v tabulcetab. 0.II 63
64 Tab. 0.IITabulka hodnot k výpočtu čel vsypávaného vinutí prvek X μ R fe R 1 X 1σ X 2σ ' R 2 ' analytický výpočet 13,588 0,382 1,087 1,087 0,865 0,31 FEMM 12,819 3,4 1,615 0,696 0,825 2,66 rozdíl 0,769 3,018 0,528 0,392 0,04 2,35 Odchylky mezi hodnotamy ze simulace a analytické metody tvoří nepřesné zadání některých materiálových vlastností, nepřesných hodnot proudů, nepřesná nelineární B-H charakteristika plechů, kdy FEMM je na všechny tyto nepřesnosti způsobené při zadávání vstupních hodnot velmi citlivý a také zároveň analytickým výpočtem nemůžeme nikdy dosáhnout absolutně přesné hodnoty. Proto prvky náhradního schématu, nelze úplně přesně stanovit. Odstraněním tohoto problému by bylo vytvoření nějakého softwarového programu pro analytický výpočet, který by stanovil přesnější hodnoty proudů. Navzdory mým rozdílným hodnotám, které vzešly ze simulace a analytického výpočtu, považuji tyto výsledky za dobré. 64
65 Seznam literatury a informačních zdrojů [1] KOPYLOV, Igor Petrovič a kolektiv. Stavba elektrických strojů, 1. vydání Praha: SNTL, s. [2] PECHÁNEK, RomanUčební materiály z předmětu PEZ. Dostupné z: [3] ČERVENÝ, JosefUčební materiály z předmětu SES1,2. Dostupné z: [4] BURSA, Jan. Metoda konečných prvků [online] dostupné z: [5] HRUŠKA, Karel. Speciální klece asynchronních strojů. Dizertační práce. ZČU v Plzni, 2011 [6] Vítězslav Stýskala, Lekce z elektrotechniky [online] Dostupné z: Motory%20nazorne%206_2.pdf [7] BAŠTA, Jan, CHLÁDEK, Jaroslav a MAYER, Imrich. Teorie elektrických strojů. 1. vyd. Praha: SNTL, [8] PETROV, G. N. Elektrické stroje 2 : Asynchronní stroje - synchronní stroje. 1. vydání. Praha : Academia, stran Zdroje obrázků (1) Obr. 1.1 převzat z: Motory%20nazorne%206_2.pdf (2) Obr. 1.2 převzat z: Motory%20nazorne%206_2.pdf 65

66 Přílohy Příloha A Příčný řez 1

67 Příloha B Podélný řez 2

68 Příloha C Drážky 3

69 Příloha D Tabulka hodnot pro výpočet zatěžovací charakteristik 4

70 Příloha E Tabulka zatěžovacích proudů pro simulace v FEMMu 5
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh asynchronního stroje s klecí nakrátko Michal Černoch 015/016 Abstrakt Předkládaná
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh asynchronního stroje s klecí nakrátko Michal Černoch 015/016 Abstrakt Předkládaná
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ. Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE Návrh 300kW trakčního asynchronního motoru s klecí nakrátko vedoucí práce: Ing. Karel
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE Návrh 300kW trakčního asynchronního motoru s klecí nakrátko vedoucí práce: Ing. Karel
DIPLOMOVÁ PRÁCE Návrh asynchronního motoru s kotvou nakrátko
 FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Návrh asynchronního motoru s kotvou nakrátko Marek Tobrman 2015 Abstrakt Tato diplomová práce řeší v první části elektromagnetický
FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Návrh asynchronního motoru s kotvou nakrátko Marek Tobrman 2015 Abstrakt Tato diplomová práce řeší v první části elektromagnetický
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního stroje s dvojitou klecí nakrátko Jiří Dražan 2018 Abstrakt
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního stroje s dvojitou klecí nakrátko Jiří Dražan 2018 Abstrakt
Základy elektrotechniky
 Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
Analýza charakteristik asynchronního motoru 13 kw pomocí moderních simulačních nástrojů
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta elektrotechnická Katedra elektrických pohonů a trakce Diplomová práce ADIP25 Analýza charakteristik asynchronního motoru 13 kw pomocí moderních simulačních nástrojů
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta elektrotechnická Katedra elektrických pohonů a trakce Diplomová práce ADIP25 Analýza charakteristik asynchronního motoru 13 kw pomocí moderních simulačních nástrojů
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY NÁVRH A MĚŘENÍ ASYNCHRONNÍHO MOTORU MALÉHO VÝKONU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Asynchronní stroje. Fakulta elektrotechniky a informatiky VŠB TUO. Ing. Tomáš Mlčák, Ph.D. Katedra elektrotechniky.
 Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz/kat452 PEZ I Stýskala, 2002 ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS)
Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz/kat452 PEZ I Stýskala, 2002 ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS)
NÁVRH TRANSFORMÁTORU. Postup školního výpočtu distribučního transformátoru
 NÁVRH TRANSFORMÁTORU Postup školního výpočtu distribučního transformátoru Pro návrh transformátoru se zadává: - zdánlivý výkon S [kva ] - vstupní a výstupní sdružené napětí ve tvaru /U [V] - kmitočet f
NÁVRH TRANSFORMÁTORU Postup školního výpočtu distribučního transformátoru Pro návrh transformátoru se zadává: - zdánlivý výkon S [kva ] - vstupní a výstupní sdružené napětí ve tvaru /U [V] - kmitočet f
20ZEKT: přednáška č. 10. Elektrické zdroje a stroje: výpočetní příklady
 20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
20ZEKT: přednáška č. 10 Elektrické zdroje a stroje: výpočetní příklady Napětí naprázdno, proud nakrátko, vnitřní odpor zdroje Théveninův teorém Magnetické obvody Netočivé stroje - transformátory Točivé
AS jako asynchronní generátor má Výkonový ýštítek stroje ojedinělé použití, jako typický je použití ve větrných elektrárnách, apod.
 Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz fei.vsb.cz/kat452 TZB III Fakulta stavební Stýskala, 2002 ASYNCHRONNÍ STROJE
Asynchronní stroje Ing. Tomáš Mlčák, Ph.D. Fakulta elektrotechniky a informatiky VŠB TUO Katedra elektrotechniky www.fei.vsb.cz fei.vsb.cz/kat452 TZB III Fakulta stavební Stýskala, 2002 ASYNCHRONNÍ STROJE
Fakulta elektrotechnická Katedra elektromechaniky a výkonové elektroniky. Diplomová práce. Návrh stejnosměrného stroje
 Fakulta elektrotechnická Katedra elektromechaniky a výkonové elektroniky Diplomová práce Návrh stejnosměrného stroje Autor práce: Bc. Lukáš Mergl Vedoucí práce: Doc. Ing. Josef Červený, Ph.D. CSC. Plzeň
Fakulta elektrotechnická Katedra elektromechaniky a výkonové elektroniky Diplomová práce Návrh stejnosměrného stroje Autor práce: Bc. Lukáš Mergl Vedoucí práce: Doc. Ing. Josef Červený, Ph.D. CSC. Plzeň
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ. Katedra elektromechaniky a výkonové elektroniky. Návrh asynchronního motoru s kotvou nakrátko
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s kotvou nakrátko autor: Jakub Štěpán Plzeň 009 vedoucí
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s kotvou nakrátko autor: Jakub Štěpán Plzeň 009 vedoucí
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
ZÁPADOČESKÁ UNIVERZITA V PLZNI DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTROTECHNIKY DIPLOMOVÁ PRÁCE Vliv činitele pólového krytí na vlastnosti synchronního generátoru. Vedoucí:
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTROTECHNIKY DIPLOMOVÁ PRÁCE Vliv činitele pólového krytí na vlastnosti synchronního generátoru. Vedoucí:
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY. 1.1 Vytvoření točivého magnetického pole
 1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
1 ELEKTRICKÉ STROJE - ZÁKLADNÍ POJMY V této kapitole se dozvíte: jak jde vytvořit točivé magnetické pole, co je výkon a točivý moment, jaké hodnoty jsou na identifikačním štítku stroje, směr otáčení, základní
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s klecí nakrátko Jan Přikryl 0 Návrh asynchronního motoru
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s klecí nakrátko Jan Přikryl 0 Návrh asynchronního motoru
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
TRANSFORMÁTORY Ing. Eva Navrátilová
 STŘEDNÍ ŠOLA, HAVÍŘOV-ŠUMBAR, SÝOROVA 1/613 příspěvková organizace TRANSFORMÁTORY Ing. Eva Navrátilová - 1 - Transformátor jednofázový = netočivý elektrický stroj, který využívá elektromagnetickou indukci
STŘEDNÍ ŠOLA, HAVÍŘOV-ŠUMBAR, SÝOROVA 1/613 příspěvková organizace TRANSFORMÁTORY Ing. Eva Navrátilová - 1 - Transformátor jednofázový = netočivý elektrický stroj, který využívá elektromagnetickou indukci
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Závislost účinnosti synchronního stroje na jeho zatížení Vedoucí práce: Doc. Ing.
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Závislost účinnosti synchronního stroje na jeho zatížení Vedoucí práce: Doc. Ing.
Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL Název zpracovaného celku: 19. 12. 2013 Ele 1 asynchronní stroje, rozdělení, princip činnosti, trojfázový a jednofázový asynchronní motor
Energetická bilance elektrických strojů
 Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Energetická bilance elektrických strojů Jiří Kubín TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Základy elektrotechniky
 Základy elektrotechniky Přednáška Transformátory deální transformátor r 0; 0 bez rozptylu mag. toků 0, Φ Φmax. sinωt ndukované napětí: u i N d N dt... cos t max imax N..f. 4,44..f.N d ui N i 4,44. max.f.n
Základy elektrotechniky Přednáška Transformátory deální transformátor r 0; 0 bez rozptylu mag. toků 0, Φ Φmax. sinωt ndukované napětí: u i N d N dt... cos t max imax N..f. 4,44..f.N d ui N i 4,44. max.f.n
1.1. Základní pojmy 1.2. Jednoduché obvody se střídavým proudem
 Praktické příklady z Elektrotechniky. Střídavé obvody.. Základní pojmy.. Jednoduché obvody se střídavým proudem Příklad : Stanovte napětí na ideálním kondenzátoru s kapacitou 0 µf, kterým prochází proud
Praktické příklady z Elektrotechniky. Střídavé obvody.. Základní pojmy.. Jednoduché obvody se střídavým proudem Příklad : Stanovte napětí na ideálním kondenzátoru s kapacitou 0 µf, kterým prochází proud
Abstrakt. Klíčová slova. Abstract. Keywords
 Abstrakt Tato diplomová práce se zabývá problematikou asynchronního motoru s plným rotorem. Úvod práce je věnován rozboru plného rotoru. Následně byl vytvořen model motoru s plným rotorem ve 2D i 3D a
Abstrakt Tato diplomová práce se zabývá problematikou asynchronního motoru s plným rotorem. Úvod práce je věnován rozboru plného rotoru. Následně byl vytvořen model motoru s plným rotorem ve 2D i 3D a
VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU Autoři textu: Ing. Ondřej Vítek, Ph.D. Květen 2013 epower Inovace výuky elektroenergetiky
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ VÝPOČET JEDNOFÁZOVÉHO TRANSFORMÁTORU Autoři textu: Ing. Ondřej Vítek, Ph.D. Květen 2013 epower Inovace výuky elektroenergetiky
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Elektroenergetika 1. Elektrické části elektrárenských bloků
 Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny - zprostředkování spojení alternátoru s elektrizační soustavou
Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny - zprostředkování spojení alternátoru s elektrizační soustavou
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s klecí nakrátko Petr Čurda 2018 Abstrakt Předkládaná
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh asynchronního motoru s klecí nakrátko Petr Čurda 2018 Abstrakt Předkládaná
Určeno pro posluchače bakalářských studijních programů FS
 rčeno pro posluchače bakalářských studijních programů FS 3. STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad 3.: V obvodě sestávajícím ze sériové kombinace rezistoru, reálné cívky a kondenzátoru vypočítejte požadované
rčeno pro posluchače bakalářských studijních programů FS 3. STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad 3.: V obvodě sestávajícím ze sériové kombinace rezistoru, reálné cívky a kondenzátoru vypočítejte požadované
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh synchronního kompenzátoru Vedoucí práce: Doc. Ing. Josef Červený, CSc. 014
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh synchronního kompenzátoru Vedoucí práce: Doc. Ing. Josef Červený, CSc. 014
Osnova kurzu. Elektrické stroje 2. Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 3
 Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ. Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE Návrh stejnosměrného stroje s derivačním buzením Bc. Karel Houška 2013 Nesymetrické
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky DIPLOMOVÁ PRÁCE Návrh stejnosměrného stroje s derivačním buzením Bc. Karel Houška 2013 Nesymetrické
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh vzduchem chlazeného turboalternátoru vedoucí práce: doc. Ing. Josef Červený,
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh vzduchem chlazeného turboalternátoru vedoucí práce: doc. Ing. Josef Červený,
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Návrh toroidního generátoru
 1 Návrh toroidního generátoru Ing. Ladislav Kopecký, květen 2018 Toroidním generátorem budeme rozumět buď konstrkukci na obr. 1, kde stator je tvořen toroidním jádrem se dvěma vinutími a jehož rotor tvoří
1 Návrh toroidního generátoru Ing. Ladislav Kopecký, květen 2018 Toroidním generátorem budeme rozumět buď konstrkukci na obr. 1, kde stator je tvořen toroidním jádrem se dvěma vinutími a jehož rotor tvoří
21ZEL2 Transformátory
 1ZEL Transformátory Jan Zelenka ČVUT Fakulta dopravní Praha 019 1 Úvod co je transformátor? je netočivý elektrický stroj umožňuje přenášet elektrickou energii mezi obvody pomocí vzájemné magnetické indukce
1ZEL Transformátory Jan Zelenka ČVUT Fakulta dopravní Praha 019 1 Úvod co je transformátor? je netočivý elektrický stroj umožňuje přenášet elektrickou energii mezi obvody pomocí vzájemné magnetické indukce
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 17. 4. 2009 Číslo: Kontroloval: Datum: 5 Pořadové číslo žáka: 24
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektrické stroje. stroje Úvod Asynchronní motory
 Elektrické stroje Úvod Asynchronní motory Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou vždyv měniče e energie jejichž
Elektrické stroje Úvod Asynchronní motory Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou vždyv měniče e energie jejichž
Asynchronní motor s klecí nakrátko
 Aynchronní troje Aynchronní motor klecí nakrátko Řez aynchronním motorem Princip funkce aynchronního motoru Točivé magnetické pole lze imulovat polem permanentního magnetu, otáčejícího e kontantní rychlotí
Aynchronní troje Aynchronní motor klecí nakrátko Řez aynchronním motorem Princip funkce aynchronního motoru Točivé magnetické pole lze imulovat polem permanentního magnetu, otáčejícího e kontantní rychlotí
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Podrobný výpočet oteplení cívky kotvy synchronního stroje Bc. Jiří Ipser 018 Abstrakt
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Podrobný výpočet oteplení cívky kotvy synchronního stroje Bc. Jiří Ipser 018 Abstrakt
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2012 1.1.2 HLAVNÍ ČÁSTI ELEKTRICKÝCH STROJŮ 1. ELEKTRICKÉ STROJE Elektrický stroj je definován jako elektrické zařízení, které využívá ke své činnosti elektromagnetickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2012 1.1.2 HLAVNÍ ČÁSTI ELEKTRICKÝCH STROJŮ 1. ELEKTRICKÉ STROJE Elektrický stroj je definován jako elektrické zařízení, které využívá ke své činnosti elektromagnetickou
Příloha-výpočet motoru
 Příloha-výpočet motoru 1.Zadané parametry motoru: vrtání d : 77mm zdvih z: 87mm kompresní poměr ε : 10.6 atmosférický tlak p 1 : 98000Pa teplota nasávaného vzduchu T 1 : 353.15K adiabatický exponent κ
Příloha-výpočet motoru 1.Zadané parametry motoru: vrtání d : 77mm zdvih z: 87mm kompresní poměr ε : 10.6 atmosférický tlak p 1 : 98000Pa teplota nasávaného vzduchu T 1 : 353.15K adiabatický exponent κ
Elektrické stroje pro hybridní pohony. Indukční stroje asynchronní motory. Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha
 Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
Indukční stroje asynchronní motory Doc.Ing.Pavel Mindl,CSc. ČVUT FEL Praha 1 Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste. Rozdělení podle toku
Rezonanční elektromotor II
 - 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
- 1 - Rezonanční elektromotor II Ing. Ladislav Kopecký, 2002 V tomto článku dále rozvineme a zpřesníme myšlenku rezonančního elektromotoru. Nejdříve se zamyslíme nad vhodnou konstrukcí elektromotoru. Z
Motor s kotvou nakrátko. Konstrukce: a) stator skládá se: z nosného tělesa (krytu) motoru svazku statorových plechů statorového vinutí
 stator skládá se: z nosného tělesa (krytu) motoru svazku statorových plechů statorového vinutí") Trojfázové asynchronní motory nejdůležitější a nejpoužívanější trojfázové motory jsou označovány indukční motory magnetické pole statoru indukuje v rotoru napětí a vzniklý proud vyvolává sílu otáčející
Trojfázové asynchronní motory nejdůležitější a nejpoužívanější trojfázové motory jsou označovány indukční motory magnetické pole statoru indukuje v rotoru napětí a vzniklý proud vyvolává sílu otáčející
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY ROZBOR ZTRÁT MALÝCH ASYNCHRONNÍCH MOTORŮ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
METODICKÝ LIST Z ELEKTROENERGETIKY PRO 3. ROČNÍK řešené příklady
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA ELEKTROTECHNICKÁ BRNO,KOUNICOVA16 METODICKÝ LIST Z ELEKTROENERGETIKY PRO 3. ROČNÍK řešené příklady Třída : K4 Název tématu : Metodický list z elektroenergetiky řešené příklady
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA ELEKTROTECHNICKÁ BRNO,KOUNICOVA16 METODICKÝ LIST Z ELEKTROENERGETIKY PRO 3. ROČNÍK řešené příklady Třída : K4 Název tématu : Metodický list z elektroenergetiky řešené příklady
6 Měření transformátoru naprázdno
 6 6.1 Zadání úlohy a) změřte charakteristiku naprázdno pro napětí uvedená v tabulce b) změřte převod transformátoru c) vypočtěte poměrný proud naprázdno pro jmenovité napětí transformátoru d) vypočtěte
6 6.1 Zadání úlohy a) změřte charakteristiku naprázdno pro napětí uvedená v tabulce b) změřte převod transformátoru c) vypočtěte poměrný proud naprázdno pro jmenovité napětí transformátoru d) vypočtěte
1.1 Trojfázové asynchronní motory s kotvou nakrátko
 1 ASYNCHRONNÍ MOTORY 1.1 Trojfázové asynchronní motory s kotvou nakrátko V této kapitole se dozvíte: konstrukci a princip činnosti asynchronního motoru, co je to skluz a jak se vypočte, čas potřebný na
1 ASYNCHRONNÍ MOTORY 1.1 Trojfázové asynchronní motory s kotvou nakrátko V této kapitole se dozvíte: konstrukci a princip činnosti asynchronního motoru, co je to skluz a jak se vypočte, čas potřebný na
Měření transformátoru naprázdno a nakrátko
 Měření u naprázdno a nakrátko Měření naprázdno Teoretický rozbor Stav naprázdno je stavem u, při kterém je I =. řesto primárním vinutím protéká proud I tzv. magnetizační, jenž je nutný pro vybuzení magnetického
Měření u naprázdno a nakrátko Měření naprázdno Teoretický rozbor Stav naprázdno je stavem u, při kterém je I =. řesto primárním vinutím protéká proud I tzv. magnetizační, jenž je nutný pro vybuzení magnetického
Synchronní stroje Ing. Vítězslav Stýskala, Ph.D., únor 2006
 8. ELEKTRICKÉ TROJE TOČIVÉ Určeno pro posluchače bakalářských studijních programů F ynchronní stroje Ing. Vítězslav týskala h.d. únor 00 říklad 8. Základy napětí a proudy Řešené příklady Třífázový synchronní
8. ELEKTRICKÉ TROJE TOČIVÉ Určeno pro posluchače bakalářských studijních programů F ynchronní stroje Ing. Vítězslav týskala h.d. únor 00 říklad 8. Základy napětí a proudy Řešené příklady Třífázový synchronní
Skalární řízení asynchronních motorů
 Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Koncept trakčního motoru pro vozidla MHD modulární řešení Jan Laksar 05 Abstrakt
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Koncept trakčního motoru pro vozidla MHD modulární řešení Jan Laksar 05 Abstrakt
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - TU Ostrava 8. TRANSFORMÁTORY
 Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - T Ostrava 8. TRANSFORMÁTORY 8. Princip činnosti 8. Provozní stavy skutečného transformátoru 8.. Transformátor naprázdno 8.. Transformátor
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - T Ostrava 8. TRANSFORMÁTORY 8. Princip činnosti 8. Provozní stavy skutečného transformátoru 8.. Transformátor naprázdno 8.. Transformátor
7 Měření transformátoru nakrátko
 7 7.1 adání úlohy a) změřte charakteristiku nakrátko pro proudy dané v tabulce b) vypočtěte poměrné napětí nakrátko u K pro jmenovitý proud transformátoru c) vypočtěte impedanci nakrátko K a její dílčí
7 7.1 adání úlohy a) změřte charakteristiku nakrátko pro proudy dané v tabulce b) vypočtěte poměrné napětí nakrátko u K pro jmenovitý proud transformátoru c) vypočtěte impedanci nakrátko K a její dílčí
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Vliv odporu rotorové klece na provozní parametry asynchronního motoru Václav Fiala
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ Katedra elektromechaniky a výkonové elektroniky BAKALÁŘSKÁ PRÁCE Vliv odporu rotorové klece na provozní parametry asynchronního motoru Václav Fiala
9 Měření na jednofázovém transformátoru při různé činné zátěži
 9 Měření na jednofázovém transformátoru při různé činné zátěži 9. Zadání úlohy a) změřte, jak se mění účiník jednofázového transformátoru se změnou zatížení sekundárního vinutí, b) u všech měření vyhodnoťte
9 Měření na jednofázovém transformátoru při různé činné zátěži 9. Zadání úlohy a) změřte, jak se mění účiník jednofázového transformátoru se změnou zatížení sekundárního vinutí, b) u všech měření vyhodnoťte
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh synchronního generátoru Filip Kotyza 2016 Abstrakt Předkládaná bakalářská
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY BAKALÁŘSKÁ PRÁCE Návrh synchronního generátoru Filip Kotyza 2016 Abstrakt Předkládaná bakalářská
Doc. Ing. Stanislav Kocman, Ph.D , Ostrava
 9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
ASYNCHRONNÍ STROJE. Asynchronní stroje se užívají nejčastěji jako motory.
 Význam a použití Asynchronní stroje se užívají nejčastěji jako motory. Jsou nejrozšířenějšími elektromotory vůbec a používají se k nejrůznějším pohonům proto, že jsou ze všech elektromotorů nejjednodušší
Význam a použití Asynchronní stroje se užívají nejčastěji jako motory. Jsou nejrozšířenějšími elektromotory vůbec a používají se k nejrůznějším pohonům proto, že jsou ze všech elektromotorů nejjednodušší
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY
ELEKTRICKÉ STROJE Ing. Eva Navrátilová
 STŘEDNÍ ŠKOLA, HAVÍŘOV-ŠUMBARK, SÝKOROVA 1/613 příspěvková organizace ELEKTRICKÉ STROJE Ing. Eva Navrátilová Elektrické stroje uskutečňují přeměnu mechanické energie na elektrickou, elektrické energie
STŘEDNÍ ŠKOLA, HAVÍŘOV-ŠUMBARK, SÝKOROVA 1/613 příspěvková organizace ELEKTRICKÉ STROJE Ing. Eva Navrátilová Elektrické stroje uskutečňují přeměnu mechanické energie na elektrickou, elektrické energie
ESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Návrh synchronního stroje s vyniklými póly Bc. Zdeněk Švec 01 Anotace Předkládaná diplomová
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROENERGETIKY A EKOLOGIE DIPLOMOVÁ PRÁCE Návrh synchronního stroje s vyniklými póly Bc. Zdeněk Švec 01 Anotace Předkládaná diplomová
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,
, paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,") 1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Stanovení požární odolnosti. Přestup tepla do konstrukce v ČSN EN
 Stanovení požární odolnosti NAVRHOVÁNÍ OCELOVÝCH KONSTRUKCÍ NA ÚČINKY POŽÁRU ČSN EN 1993-1-2 Ing. Jiří Jirků Ing. Zdeněk Sokol, Ph.D. Prof. Ing. František Wald, CSc. 1 2 Přestup tepla do konstrukce v ČSN
Stanovení požární odolnosti NAVRHOVÁNÍ OCELOVÝCH KONSTRUKCÍ NA ÚČINKY POŽÁRU ČSN EN 1993-1-2 Ing. Jiří Jirků Ing. Zdeněk Sokol, Ph.D. Prof. Ing. František Wald, CSc. 1 2 Přestup tepla do konstrukce v ČSN
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Elektroenergetika 1. Elektrické části elektrárenských bloků
 Elektroenergetika 1 Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny zprostředkování spojení alternátoru s elektrizační
Elektroenergetika 1 Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny zprostředkování spojení alternátoru s elektrizační
Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti
 Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Předmět: Ročník: Vytvořil: Datum: ELEKTROTECHNIKA PRVNÍ ZDENĚK KOVAL 31. 1. 2014 Název zpracovaného celku: Ele 1 Synchronní stroje, rozdělení, význam, princip činnosti 10. SYNCHRONNÍ STROJE Synchronní
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 1. Základní informace o této fyzikální veličině Symbol vlastní indukčnosti je L, základní jednotka henry, symbol
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 1. Základní informace o této fyzikální veličině Symbol vlastní indukčnosti je L, základní jednotka henry, symbol
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Elektrické výkonové členy Synchronní stroje
 Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
1.1 Měření parametrů transformátorů
 1.1 Měření parametrů transformátorů Cíle kapitoly: Jedním z cílů úlohy je stanovit základní parametry dvou rozdílných třífázových transformátorů. Dvojice transformátorů tak bude podrobena měření naprázdno
1.1 Měření parametrů transformátorů Cíle kapitoly: Jedním z cílů úlohy je stanovit základní parametry dvou rozdílných třífázových transformátorů. Dvojice transformátorů tak bude podrobena měření naprázdno
ANALÝZA ZTRÁT ASYNCHRONNÍCH MOTORŮ MALÉHO VÝKONU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY)
 STROJE (MOTORY)") ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY) Indukční (asynchronní) stroj je točivý elektrický stroj, jehož magnetický obvod je malou mezerou rozdělen na dvě části: stator a rotor. Obě části jsou opatřeny vinutím.
ASYNCHRONNÍ (INDUKČNÍ) STROJE (MOTORY) Indukční (asynchronní) stroj je točivý elektrický stroj, jehož magnetický obvod je malou mezerou rozdělen na dvě části: stator a rotor. Obě části jsou opatřeny vinutím.
R 4 U 3 R 6 R 20 R 3 I I 2
 . TEJNOMĚNÉ OBVODY Příklad.: V následujícím obvodě určete metodou postupného zjednodušování hodnoty zadaných proudů, napětí a výkonů. 6 chéma. = V = Ω = Ω = Ω = 6 Ω = 9 Ω 6 = Ω rčit: celkový odpor C,,,,,,,,
. TEJNOMĚNÉ OBVODY Příklad.: V následujícím obvodě určete metodou postupného zjednodušování hodnoty zadaných proudů, napětí a výkonů. 6 chéma. = V = Ω = Ω = Ω = 6 Ω = 9 Ω 6 = Ω rčit: celkový odpor C,,,,,,,,
ZÁKLADY ELEKTROTECHNIKY
 ZÁKLADY ELEKTROTECHNIKY 1) Který zákon upravuje poměry v jednoduchém elektrickém obvodu o napětí, proudu a odporu: Ohmův zákon, ze kterého vyplívá, že proud je přímo úměrný napětí a nepřímo úměrný odporu.
ZÁKLADY ELEKTROTECHNIKY 1) Který zákon upravuje poměry v jednoduchém elektrickém obvodu o napětí, proudu a odporu: Ohmův zákon, ze kterého vyplívá, že proud je přímo úměrný napětí a nepřímo úměrný odporu.
Transformátory. Teorie - přehled
 Transformátory Teorie - přehled Transformátory...... jsou elektrické stroje, které mění napětí při přenosu elektrické energie při stejné frekvenci. Používají se především při rozvodu elektrické energie.
Transformátory Teorie - přehled Transformátory...... jsou elektrické stroje, které mění napětí při přenosu elektrické energie při stejné frekvenci. Používají se především při rozvodu elektrické energie.
Základy stavby výrobních strojů Tvářecí stroje I KLIKOVÉ MECHANISMY MECHANICKÝCH LISŮ
 KLIKOVÉ MECHANISMY MECHANICKÝCH LISŮ URČEN ENÍ PRÁCE KLIKOVÉHO LISU URČEN ENÍ SETRVAČNÍKU KLIKOVÉHO LISU KLIKOVÉ MECHANISMY MECHANICKÝCH LISŮ KLIKOVÁ HŘÍDEL OJNICE KLIKOVÁ HŘÍDEL BERAN LOŽISKOVÁ TĚLESA
KLIKOVÉ MECHANISMY MECHANICKÝCH LISŮ URČEN ENÍ PRÁCE KLIKOVÉHO LISU URČEN ENÍ SETRVAČNÍKU KLIKOVÉHO LISU KLIKOVÉ MECHANISMY MECHANICKÝCH LISŮ KLIKOVÁ HŘÍDEL OJNICE KLIKOVÁ HŘÍDEL BERAN LOŽISKOVÁ TĚLESA
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF POWER ELECTRICAL AND ELECTRONIC
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF POWER ELECTRICAL AND ELECTRONIC
L e k c e z e l e k t r o t e c h n i k y
 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 6 Oddíl 2 1 Přednáška 1 2 TÉMA PŘEDNÁŠKY: ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS) je používán jako 1f a 3f motor (AM) a také jako
L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 6 Oddíl 2 1 Přednáška 1 2 TÉMA PŘEDNÁŠKY: ASYNCHRONNÍ STROJE Obecně Asynchronní stroj (AS) je používán jako 1f a 3f motor (AM) a také jako
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
2. STŘÍDAVÉ JEDNOFÁZOVÉ OBVODY
 2. STŘÍDAVÉ JEDNOFÁZOVÉ OBVODY Příklad 2.1: V obvodě sestávajícím ze sériové kombinace rezistoru reálné cívky a kondenzátoru vypočítejte požadované veličiny určete také charakter obvodu a nakreslete fázorový
2. STŘÍDAVÉ JEDNOFÁZOVÉ OBVODY Příklad 2.1: V obvodě sestávajícím ze sériové kombinace rezistoru reálné cívky a kondenzátoru vypočítejte požadované veličiny určete také charakter obvodu a nakreslete fázorový
Měření závislosti indukčnosti cívky (Distribuce elektrické energie - BDEE)
") FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Měření závislosti indukčnosti cívky (Distribuce elektrické energie - BDEE) Autoři textu: Ing. Jan Varmuža Květen 2013 epower
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Měření závislosti indukčnosti cívky (Distribuce elektrické energie - BDEE) Autoři textu: Ing. Jan Varmuža Květen 2013 epower
Pohony šicích strojů
 Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh vysokootáčkového asynchronního motoru v pevném závěru Bc. Jan Brázda 05 Návrh
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh vysokootáčkového asynchronního motoru v pevném závěru Bc. Jan Brázda 05 Návrh
Zadané hodnoty: R L L = 0,1 H. U = 24 V f = 50 Hz
 . STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad.: V elektrickém obvodě sestávajícím ze sériové kombinace rezistoru reálné cívky a kondenzátoru vypočítejte požadované veličiny určete také charakter obvodu a nakreslete
. STŘÍDAVÉ JEDNOFÁOVÉ OBVODY Příklad.: V elektrickém obvodě sestávajícím ze sériové kombinace rezistoru reálné cívky a kondenzátoru vypočítejte požadované veličiny určete také charakter obvodu a nakreslete
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh lineárního indukčního stroje se vznášivým účinkem Jiří Svítek 01 Anotace
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA ELEKTROTECHNICKÁ KATEDRA ELEKTROMECHANIKY A VÝKONOVÉ ELEKTRONIKY DIPLOMOVÁ PRÁCE Návrh lineárního indukčního stroje se vznášivým účinkem Jiří Svítek 01 Anotace