LABORATOŘ BIOKYBERNETIKY A POČÍTAČOVÉ PODPORY VÝUKY ÚPF, 1. LF UK
|
|
|
- Štěpán Radovan Neduchal
- před 5 lety
- Počet zobrazení:
Transkript
1 LABORATOŘ BIOKYBERNETIKY A POČÍTAČOVÉ PODPORY VÝUKY ÚPF,. LF UK



2




3 Nátroje pro tvorbu modelů Tvorba modelu Tvorba imulátoru Nátroje pro tvorbu imulátorů Formalizace fyziologických vztahů Implementace modelu do imulátoru Vytváření imulačního modelu Vytváření uživatelkého rozhraní imulátoru Ověřování chování imulačního modelu Verifikace imulátoru ve výuce Chování modelu je jiné než chování biologického originálu Dotatečně dobrá hoda chování modelu chováním biologického originálu Nové požadavky na imulátor nové požadavky na imulační modelu
4 Formalizace fyziologických vztahů Annual Review of Phyiology 972 A.C. Guyton




5 Functional block Divider Formalizace fyziologických vztahů??!! Integrator Multiplier PPA PLA Summator PCP PCP=.55 PLA+.45 PPA



6 Formalizace fyziologických vztahů Multiplier Guyton Simulink Divider Guyton Summator Guyton Integrator Guyton Nátroje pro tvorbu modelů Simulink Simulink Simulink Functional block Simulink Guyton
7 NON-MUSCLE OXYGEN DELIVERY VASCULAR STRESS RELAXATION MUSCLE BLOOD FLOW CONTROL AND PO2 26 OSV PK u^3 PK x o Xo P2O upper limit 8 MO u^3 27 POT^3 HM xo 27 VVE P3O 242 PVO 223 POT AHM HM 6 AHM 58A NOD CNA 42.3 RFN lower limit.35 PVO RBF PRA CNX CNE REK PPC AHY 8 AHZ AH7 AHM lower limit 3 RFN.4 AH AOM.9898 AMM.3333 CNR RBF AUM 82 CN CNY lower limit 4 CNZ 6 AM AHM 4 AH u NOD 22 upper limit 5. lower limit.4 RFN.2 ARF EXC 87 AHC AH2 GP3 PDO APD AH4 26 AAR AM VPF 2 POM PMO VIM PM GF4 GF3 xo u^3 P3O^ TVD OVA QO2.333 GF3 97 BFN 4 POT algebraic loop breaking VIM.95 RMO upper limit 8 PO 232 OSA VV7 VV GLP 3.67 VV7 VV2 6 lower limit Z AHM 5 lower limit.5 25 Z 29 PPC POE 248 AAR TVD STH TRR.8 VV7 DVS 5 93 STH VV6. PFL EVR AAR 33 AOM 8 VUD lower limit.3.25 SRK P2O POT 8 VUD GFR 99 PM4 x o OVA DOB 236 QOM BFM THIRST AND DRINKING P4^3 GFN P4O 8..5 KIDNEY DYNAMICS AND EXCRETION RR xo 2A u^2 PM^2 5 OVA POV AMM lower limit lower limit RDO AU POT 245 PMO 5 RMO PM3 24 PK2 8 POV BFM AOM x o M AM AU AH8 lower_limit_ NON-MUSCLE LOCAL BLOOD FLOW CONTROL 4 POV POB POD 273 ARM POK lower limit.2 AR 4 AR3 AR xo lower limit.5 2 RAR. AR2 RAR AUM PAM 3.5 PON A3K.3 32 xo.85 VAS PA VAE 5 VBD VVR 6 BFN PGS PIF xo VVS.3 QVO 2.8 VVS lower limit. VVE.825 QVO PVS AUC AB u^ AUK AUB^ RPT 22 2 VPE PPA PGL AUZ AUN 3 AU AUN calculation.2 AU AUV xo 33 AUY AUH. 8 VVR 7 PPA AUH AVE PPD AUTONOMIC CONTROL SVO QLO AU 2 PPI 2-(.5/u) DFP PPI = 2 - (.5/VPF) e- DFP xo VPF REK u^2 CHY^2 7 NOD PGC PGR PG CNA 8 NED.25 9 xo 23. NAE CNA 42 6 HM PIF 576 upper limit PGP NID PTC PGH HMD VRC 2 xo HPL xo HMD HPR STH. VG RKC VRC 24 CKE xo. 5 RC V2D.4 VPF 75 KE KOD 6 VB HEART RATE AND STROKE VOLUME xo.3332 VGD 352 HPR PLF KID KED DHM 336b HPL xo VRC PFI 4 AM KCD.28 u^.625 PP3^. u^.625 PA4^.625 xo 285 KE 27 5 xo HM KIR CKE 3 (u/2)^ HMD.5 PP HYL PTS VIC PIF VPF 4 4 VTW PRM VEC CHY 3 VP 2 VTS VTW PULMONARY DYNAMICS AND FLUIDS RED CELLS AND VISCOSITY HEART HYPERTROPHY OR DETERIORATION VIC KIE KCD.3 HM2 4 RCD PPA4 336c PPO CPF PRA RC 33 PPI HR PTT = (VTS/2)^2 PTT PLF PLF xo VG 85 POT 5 35 xo 25 KI GPR VTS PPA HSR 34 POS POS.99 PA HSL.92 PPC e-7 PPD VG e-8 48 PPN PCP SVO 338 VIE POY 47 AVE 86 VTS lower limit.2375 xo 34 PTS = f(vif) VIM.333 VPF PO2 PPR AUM. 3 7 xo POT GPD VIM 329 PO CPN CPP PPC 32 PIF PTS xo CNA VIC VIF 2 84 CCD VID 2 VID VVR PLA VTC CIRCULATORY DYNAMICS GP2 83 VV9.3 AUD VID CKI VTL 3.59 AU.5e-6 GPD VTD. AUL GP VIF AUJ^AUZ AUJ uv xo ALDOSTERONE CONTROL IFP xo 2. VPA.48 PTT 2 3 DPI TISSUE FLUIDS PRESSURES AND GEL x7 o lower limit DPL PRA CNA 9 CPI DPC.4 4 PRA VPA.5 66 KN AMC VRA 5 QRO QRN = f(pra) CKE 5 CPI PIF lower limit QPO PLA AM AMT AMR 2.4 PR QPO 3 5 xo PRA PTC AMP = f(pa) 6 PIF DPL 5 VRA PPA AU8 AUM QRN AUH AUH 5.26 AMP PLD lower limit 5.2 DRA 5 RVM = f(pp2) Z8 39 AUN CALCULATION AUN 5 PPA xo when PA<5: AUN=6 when 2>PA<5: AUN=.2*(5-PA) when PA>=5: AUC= VTL DPL PTC 38 AUB QRO 6 PP2 RPT VTL HMD HMD 52 AU2.5 AUB calculation PA QVO RVM PL PLA u AM2 AM3 PA HSR HPR DAU 35 when PA<4: AUB=.8578 AUB when 4>PA<7: AUB=.4286*(7-PA) when PA>=7: AUB= AUH.4 RPV DLA 3 AUB CALCULATION PA AU6 9.8 lower limit AM AM ANM PP QLN = f(pla) xo AM 49 RPA qrt AUC AUC calculation VP RVG RVM 53 QLN VLA QLO AUC CALCULATION CPA VLA when PA<4: AUC=.2 when 4>PA<8: AUC=.3*(8-PA) when PA>=8: AUC= PA PLA 25 EXC Z2 ANGIOTENSIN CONTROL DPC PR 5 VLE EXE P2O VP xo 3 VTL QRF POQ 5 ANT DPC.4 PVS.6 QLN 58 QLO 26 LVM = f(pa2) ANM PLA 57 AN 74 PVS CNE CP VPD VUD CNA 42 xo CPI 7 DFP VRA PLA 8 upper limit 8 PA lower limit 4. 5 VPA CNE PC^3 7 PA2 LVM 59 ANC (.2/u)^3 (.2/RFN)^3 CPP TVD. VB VLA 58 QLN 5.85 QLO.4 LVM HMD HPL POT POQ 59 HSL QAO QLO e-7 VVS RFN CPK 3 PA.897 VTC.42 53b 53a 6 VAS 8 PPC AN2 u REK.4 u^3 3.7 CV PA AN CPP VAS3 DAS 3.3 lower limit.7 ANM xo 6.8 PTC PVS AN5.4 VTC 9 VV8 PPC PRP VP CFC 2.95 DVS 6 CPP 72 VP PVS 2 RSN AR3 xo if (POD<) {POJ=PODx3.3} POZ lower limit.3 VV7 QAO BFN b ANM VB VVE RBF PA POJ 6.8 VRC BFM.4 DPP.47 PC 5.4 RVS POC VB 5 7 AUM DLP LPK CPR 7.4 DPL PC PC.7 67 PVS BFN BFM PGS DP 79 PPD PVG 39 7 PAM AUM CN2 ANTIDIURECTIC HORMONE CONTROL RVS RV 3 37 VIM VIM A2K RV 43 RVS RSM AUM RAM CAPILLARY MEMBRANE DYNAMICS 2.9 x o CN7.79 AMM VIM RAM ANU.6 ARM 4A ANU POA algebraic loop breaking 4 AVE lower limit.95 ARM POR.6 ANM.9456 xo AK ELECTROLYTES AND CELL WATER

8 Matlab/Simulink Softwarové nátroje pro tvorbu modelů


9 Matlab/Simulink Softwarové nátroje pro tvorbu modelů

10 Matlab/Simulink Softwarové nátroje pro tvorbu modelů
11 Matlab/Simulink Grafické zobrazení matematických vztahů?
12 GKf RAP RBF AffC TubC TubC GP=RAP-PAff PAff=RBF/AffC PTP=GFR/TubC GP PTP AVeCOP GKf NETP=GP-PTP-AVeCOP GFR=NETP*GKf Grafické zobrazení matematických vztahů? GFR GFR RPF APr APr B A (APr)^2 A*Apr GFR RPF B*(APr)^2 ACOP=A*Apr+B*(APr)^2 FF=GFR/RPF EPr=APr/(-FF) EPr^2 (-FF) B*EPr^2 ACOP+ECOP Matlab/Simulink A*EPr ECOP=A*EPr+B*EPr^2 AVeCOP=(ACOP+ECOP)/2
13 GKf RAP RBF AffC TubC TubC GP=RAP-PAff PAff=RBF/AffC PTP=GFR/TubC GP PTP AVeCOP GKf NETP=GP-PTP-AVeCOP GFR=NETP*GKf Grafické zobrazení matematických vztahů? GFR GFR RPF APr APr B A (APr)^2 A*Apr GFR RPF B*(APr)^2 ACOP=A*Apr+B*(APr)^2 FF=GFR/RPF EPr=APr/(-FF) EPr^2 (-FF) B*EPr^2 ACOP+ECOP Matlab/Simulink A*EPr ECOP=A*EPr+B*EPr^2 AVeCOP=(ACOP+ECOP)/2
^2 A*Apr GFR RPF B*(APr)^2 ACOP=A*Apr+B*(APr)^2 FF=GFR/RPF EPr=APr/(-FF) EPr^2 (-FF) B*EPr^2 ACOP+ECOP Matlab/Simulink A*EPr")
14 GKf RAP RBF AffC TubC TubC GP=RAP-PAff PAff=RBF/AffC PTP=GFR/TubC GP PTP AVeCOP GKf NETP=GP-PTP-AVeCOP GFR=NETP*GKf Grafické zobrazení matematických vztahů? GFR GFRold-GFRnew Algebraic Contraint GFR RPF APr APr B A (APr)^2 A*Apr GFR RPF B*(APr)^2 ACOP=A*Apr+B*(APr)^2 FF=GFR/RPF EPr=APr/(-FF) EPr^2 (-FF) B*EPr^2 ACOP+ECOP Matlab/Simulink A*EPr ECOP=A*EPr+B*EPr^2 AVeCOP=(ACOP+ECOP)/2


15 Grafické zobrazení matematických vztahů? Ne! Grafické zobrazení tranformace vtupních hodnot na výtupní Matlab/Simulink
16 Matlab/Simulink Softwarové nátroje pro tvorbu modelů
17 Kauzální modelovací nátroje Je jednoznačně definován potup výpočtu Kauzální modelování Model v Simulinku vyjadřuje píše způob výpočtu než trukturu modelované reality Matlab/Simulink




18 Akauzální modelovací nátroje Komponenty obahují rovnice Propojení komponent pře konenktory Soutava rovnic Akauzální modelování
19 Akauzální přítup Zobecnělé úilí (effort) Zobecnělá hybnot p e e=rf R C q=ce q Zobecnělá akumulace (quantity) p=lf L f Zobecnělý tok (flow) Obecné ytémové vlatnoti
20 Akauzální přítup e Zobecnělé úilí (effort) f Zobecnělý tok (flow) Obecné ytémové vlatnoti
21 Akauzální přítup e f Zobecnělé úilí (effort) Zobecnělý tok (flow) Obecné ytémové vlatnoti
22 Akauzální konektory e f Zobecnělé úilí (effort) Zobecnělý tok (flow)
23 Akauzální propojení Hodnoty propojených nonflow proměnných (e) jou tejné Součet toků (f) =







24 v v=v2=v3 v2 i i+i2+i3= i2 i i3 v3 i





25 p.v p.i Reitor n.v n.i R*i = v p.v v = p.v n.v n.v p.v p.i Capacitor i = C*der(v) n.v n.i p.i v i = p.i = n.i n.i p.v p.i Inductor L*der(i) = v n.v n.i p.v v = p.v n.v n.v p.v v = p.v n.v n.v p.i v n.i p.i v n.i i = p.i = n.i i = p.i = n.i
26 Potačí popi rovnicemi akauzální modelováni Blok Modelování v Modelice konektor PAO vodič typ flow P Q RC Q-QA PAW CS QA typ nonflow Hodnoty propojených nonflow proměnných jou tejné RP PA CL PPL CW P = tlak R*Q=P Součet toků = Q = tok Q=C*der(P) R*Q=P Q=C*der(P) Q=C*der(P)
 Q=C*der(P) Q=C*der(P)")
27 Modelování v Modelice PAO Q RC PAW QA RP PA Potačí popi rovnicemi akauzální modelováni P Q-QA CS CL PPL CW R*Q=P R*Q=P Q=C*der(P) Q=C*der(P) Q=C*der(P)

28 Example: Simple pulmonary mechanic model Simulink olution
=P R*Q=P R*Q=P Q=C*der(P) Q=C*der(P)")
29 Potačí popi rovnicemi akauzální modelováni Modelování v Modelice P RC = Q LC=, Q-QA PAW QA RP =,5 CS=,5 PA CL=,2 PPL CW=,2 L*der(Q)=P R*Q=P R*Q=P Q=C*der(P) Q=C*der(P) Q=C*der(P)
30 Example: Simple pulmonary mechanic model Simulink olution
31 Příklad: Elatický kompartment <V <V <V V V V StreedVolume = max(vol-v,); Preure V Vol Preure = (StreedVolume/Compliance) V
32 Příklad: Elatický kompartment <V <V <V V V V StreedVolume = max(vol-v,); Preure ExternalPreure V Vol Preure = (StreedVolume/Compliance) + ExternalPreure; V
33 Příklad: Elatický kompartment <V <V <V V V V StreedVolume = max(vol-v,); Preure ExternalPreure V Vol Preure = (StreedVolume/Compliance) + ExternalPreure; V der(vol) = q; tok - q
34 Příklad: Elatický kompartment <V <V <V V V V StreedVolume = max(vol-v,); Preure ExternalPreure V Vol Preure = (StreedVolume/Compliance) + ExternalPreure; der(vol) = q; V tok - q preure
35 Příklad: Elatický kompartment <V <V <V V V V StreedVolume = max(vol-v,); Preure Název konektoru: referencepoint ExternalPreure V Vol Preure = (StreedVolume/Compliance) + ExternalPreure; V der(vol) = q; Název konektoru: referencepoint tok - referencepoint.q referencepoint.preure

36 Příklad: Elatický kompartment Třídy: Vzory Komponenty: Intance Název akauzálního konektoru: referencepoint Vol Preure
; Vol Preure Preure = (StreedVolume/Compliance) + ExternalPreure; referencepoint.")
37 referencepoint.preure referencepoint.q initial equation Vol = initialvol; equation der(vol) = referencepoint.q; StreedVolume = max(vol-v,); Vol Preure Preure = (StreedVolume/Compliance) + ExternalPreure; referencepoint.preure = Preure; end VacularElacticBloodCompartment;

38 Vtup ExternalPreure konektor 2 Vtup V Vtup Compliance konektor konektor ReferencePoint konektor 3 Výtup Preure Výtup Vol










39 Elatické kompartmenty cév Toky krve v cévách (mají tlak a průtok) Řízené čerpadlo (pravá komora) Sběrnice řídících ignálů Regulovatelné odpory



40 VacularCompartment organbloodflo... organbloodflow Signal bone organbloodflow Signal brain organbloodflow Signal fat organbloodflo... organbloodflow Signal kidney organbloodflow Signal kin q_in organbloodflow Signal keletal... q_out 34 ml min... Kidney_NephronCount_Total_xNormal Kidney_NephronCount_Total_xNormal Nephro... TGF_Vacular_ignal Anetheia_VacularConductance TGFEff... AlphaPool_Effect A2Pool_LogConc AlphaBlocade_Effect AplhaR... AlphaPool_Effect GangliaGeneral_NA AlphaBlocade_Effect Kidney_MyogenicDelay_PreureChange Myogen... GangliaGeneral_NA q_in Affere... kidney 23 ml min... Nephro... Aneth... A2Effe... AplhaR... Effere... 6 ml/min/... Kidney_Acurate... q_out organbloodflow Signal repirat... organbloodflow Signal leftheart organbloodflow Signal rightheart organbloodflow Signal otherti... peripheral


41 Quantitative Human Phyiology (QHP) Thoma Coleman
42 Změna nátrojů pro tvorbu imulátorů Nátroje pro tvorbu imulátorů Směr imulátory putitelné v prohlížeči
43 Automatické generování modelu jako virtuálního řadiče Automatické generování modelu jako.net aembly Tvorba imulačního modelu v protředí Matlab/Simulink Model jako virtuální řadič Řídící vrtva Model jako.net aembly Řídící vrtva Tvorba animací (v Adobe Flah) Vývoj imulátoru (programátorká práce) Interaktivní animace Vývojové protředí Control Web Interaktivní animace Vývojové protředí Microoft ViualStudio.NET Ditribuce imulátorů Tvorba cénářů výukových programů využívajících imulační hry a imulátory


44


45







46 Protředí.NET 3.5 Model jako virtuální řadič Modelica.NET Automatické generování modelu jako.net aembly Model jako.net aembly Řídící vrtva Vývojové protředí Microoft ViualStudio Tvorba imulačního modelu v protředí Matlab/Simulink Modelica Tvorba animací v Expreion Blend Vývoj imulátoru (programátorká práce) Interaktivní animace Řídící vrtva Interaktivní animace Vývojové protředí Control Web Ditribuce imulátorů v prohlížeči Tvorba cénářů výukových programů využívajících imulační hry a imulátory
Jiří Kofránek, Jan Rusz, Stanislav Matoušek
 Vzkříšení Guytonova diagramu od obrázku k imulačnímu modelu 7 VZKŘÍŠENÍ GUYTON DIAGRU - OD OBRÁZKU K SIMULAČNÍMU MODELU Jiří Kofránek, Jan Ruz, Stanilav Matoušek Anotace Autoři popiují implementaci klaického
Vzkříšení Guytonova diagramu od obrázku k imulačnímu modelu 7 VZKŘÍŠENÍ GUYTON DIAGRU - OD OBRÁZKU K SIMULAČNÍMU MODELU Jiří Kofránek, Jan Ruz, Stanilav Matoušek Anotace Autoři popiují implementaci klaického
Modelica Day 2015. Jiří Kofránek. Univerzita Karlova v Praze, 1. lékařská fakulta, Laboratoř biokybernetiky a počítačové podpory výuky
 Modelica Day 2015 Jiří Kofránek Univerzita Karlova v Praze, 1. lékařská fakulta, Laboratoř biokybernetiky a počítačové podpory výuky Naše cesta k Modelice Jiří Kofránek Modelica pro simulace Formalizace
Modelica Day 2015 Jiří Kofránek Univerzita Karlova v Praze, 1. lékařská fakulta, Laboratoř biokybernetiky a počítačové podpory výuky Naše cesta k Modelice Jiří Kofránek Modelica pro simulace Formalizace
Guytonův diagram, Modelování, Akauzální modelování, Modelica, Fyziologické modelování, Matematické modelování, Objektově orientované modelování
 AKAUZÁLNÍ VZKŘÍŠENÍ GUYTONOVA DIAGRAMU Marek Mateják, Jiří Kofránek, Jan Rusz Anotace V minulém ročníku MEDSOFT jsme popsali implementaci klasického mnohokrát přetiskovaného Guytonova diagramu řízení krevního
AKAUZÁLNÍ VZKŘÍŠENÍ GUYTONOVA DIAGRAMU Marek Mateják, Jiří Kofránek, Jan Rusz Anotace V minulém ročníku MEDSOFT jsme popsali implementaci klasického mnohokrát přetiskovaného Guytonova diagramu řízení krevního
KAUZÁLNÍ NEBO AKAUZÁLNÍ MODELOVÁNÍ: DŘINU LIDEM NEBO DŘINU STROJŮM
 KAUZÁLNÍ NEBO AKAUZÁLNÍ MODELOVÁNÍ: DŘINU LIDEM NEBO DŘINU STROJŮM J. Kofránek, M. Mateják, P. Privitzer, M. Tribula Laboratoř biokybernetiky, ÚPF,. LF UK, Praha Abtrakt Modely vytvářené pomocí klaických
KAUZÁLNÍ NEBO AKAUZÁLNÍ MODELOVÁNÍ: DŘINU LIDEM NEBO DŘINU STROJŮM J. Kofránek, M. Mateják, P. Privitzer, M. Tribula Laboratoř biokybernetiky, ÚPF,. LF UK, Praha Abtrakt Modely vytvářené pomocí klaických
Publikace podporované projektem MŠMT 2C0631
 Příloha a Publikace podporované projektem MŠMT 2C063 I. publikace čeké/lovenké Publikace podporované projektem MŠMT 2C063 I. Publikace čeké/lovenké. Jiří Kofránek, Jan Ruz: Od obrázkových chémat k modelům
Příloha a Publikace podporované projektem MŠMT 2C063 I. publikace čeké/lovenké Publikace podporované projektem MŠMT 2C063 I. Publikace čeké/lovenké. Jiří Kofránek, Jan Ruz: Od obrázkových chémat k modelům
INTEGROVANÉ MODELY FYZIOLOGICKÝCH SYSTÉMŮ
 MUDr. Jiří Kofránek, CSc. INTEGROVANÉ MODELY FYZIOLOGICKÝCH SYSTÉMŮ Habilitační práce Praha 28. února 20 ii výzkumný grant GAUK 242/995/C (995- - - - - - - - - - - iii iv Motto: Snili jsme po léta o instituci
MUDr. Jiří Kofránek, CSc. INTEGROVANÉ MODELY FYZIOLOGICKÝCH SYSTÉMŮ Habilitační práce Praha 28. února 20 ii výzkumný grant GAUK 242/995/C (995- - - - - - - - - - - iii iv Motto: Snili jsme po léta o instituci
Základní struktura matematického modelu fyziologických funkcí člověka
 projekt MŠMT č. C6 e-golem: lékařský výukový simulátor fyziologických funkcí člověka jako podklad pro e-learningovou výuku medicíny akutních stavů Základní struktura matematického modelu fyziologických
projekt MŠMT č. C6 e-golem: lékařský výukový simulátor fyziologických funkcí člověka jako podklad pro e-learningovou výuku medicíny akutních stavů Základní struktura matematického modelu fyziologických
Příloha 2. Publikace podporované projektem MŠMT 2C06031 za rok 2007
 Příloha 2 Publikace podporované projektem MŠMT 2C63 za rok 27 Seznam publikací podporovaných projektem MŠMT 2C63 za rok 27 Čeké. Jiří Kofránek, Jan Ruz: Od obrázkových chémat k modelům pro výuku. Čekolovenká
Příloha 2 Publikace podporované projektem MŠMT 2C63 za rok 27 Seznam publikací podporovaných projektem MŠMT 2C63 za rok 27 Čeké. Jiří Kofránek, Jan Ruz: Od obrázkových chémat k modelům pro výuku. Čekolovenká
Základní struktura matematického modelu fyziologických funkcí člověka
 Základní struktura matematického modelu fyziologických funkcí člověka (modifikace modelu A.C.Guytona ve formě simulačních čipů) podrobný popis rovnic simulačního modelu a odladěná schémata modelu v Simulinku
Základní struktura matematického modelu fyziologických funkcí člověka (modifikace modelu A.C.Guytona ve formě simulačních čipů) podrobný popis rovnic simulačního modelu a odladěná schémata modelu v Simulinku
TVORBA LÉKAŘSKÝCH SIMULÁTORŮ
 České vysoké učení technické v Praze, Fakulta elektrotechnická MUDr. Jiří Kofránek, CSc. TVORBA LÉKAŘSKÝCH SIMULÁTORŮ Habilitační práce Pracoviště: Univerzita Karlova v Praze. lékařská fakulta, Ústav patologické
České vysoké učení technické v Praze, Fakulta elektrotechnická MUDr. Jiří Kofránek, CSc. TVORBA LÉKAŘSKÝCH SIMULÁTORŮ Habilitační práce Pracoviště: Univerzita Karlova v Praze. lékařská fakulta, Ústav patologické
Kreativní propojení objektových technologií pro tvorbu výukových biomedicínských simulátorů
 Kreativní propojení objektových technologií pro tvorbu výukových biomedicínských simulátorů Jiří Kofránek, Marek Mateják, Pavol Privitzer Oddělení informatiky a počítačové podpory výuky ÚPF,. LF UK, Praha,
Kreativní propojení objektových technologií pro tvorbu výukových biomedicínských simulátorů Jiří Kofránek, Marek Mateják, Pavol Privitzer Oddělení informatiky a počítačové podpory výuky ÚPF,. LF UK, Praha,
Od obrázkových schémat k modelům pro výuku
 PØEHLEDNÉ ÈLÁNKY Od obrázkových chémat k modelům pro výuku MUDr. Jiøí Kofránek, CSc., Bc. Jan Ruz Laboratoø biokybernetiky, Útav patologické fyziologie. LF UK, Praha SOUHRN Pøed pìtatøiceti lety uveøejnil
PØEHLEDNÉ ÈLÁNKY Od obrázkových chémat k modelům pro výuku MUDr. Jiøí Kofránek, CSc., Bc. Jan Ruz Laboratoø biokybernetiky, Útav patologické fyziologie. LF UK, Praha SOUHRN Pøed pìtatøiceti lety uveøejnil
Martin Tribula, Marek Mateják, Pavol Privitzer, Jiří Kofránek
 WEBOVÝ SIMULÁTOR LEDVIN WEBOVÝ SIMULÁTOR LEDVIN Martin Tribula, Marek Mateják, Pavol Privitzer, Jiří Kofránek Anotace Ledviny jsou důležitý regulační orgán vnitřního prostředí. Funkce ledvin je dynamický
WEBOVÝ SIMULÁTOR LEDVIN WEBOVÝ SIMULÁTOR LEDVIN Martin Tribula, Marek Mateják, Pavol Privitzer, Jiří Kofránek Anotace Ledviny jsou důležitý regulační orgán vnitřního prostředí. Funkce ledvin je dynamický
Jiří Kofránek, Pavol Privitzer, Marek Mateják, Martin Tribula
 AKAUZÁLNÍ MODELOVÁNÍ NOVÝ PŘÍSTUP PRO TVORBU SIMULAČNÍCH HER Jiří Kofránek, Pavol Privitzer, Marek Mateják, Martin Tribula Anotace Modely vytvářené pomocí klasických simulinkových sítí přehledně graficky
AKAUZÁLNÍ MODELOVÁNÍ NOVÝ PŘÍSTUP PRO TVORBU SIMULAČNÍCH HER Jiří Kofránek, Pavol Privitzer, Marek Mateják, Martin Tribula Anotace Modely vytvářené pomocí klasických simulinkových sítí přehledně graficky
KOMPLEXNÍ MODELY INTEGROVANÝCH COMPLEX MODEL OF INTEGRATED PHYSIOLOGICAL SYSTEMS A THEORETICAL BASIS FOR MEDICAL
 KOMPLEXNÍ MODELY INTEGROVANÝCH COMPLEX MODEL OF INTEGRATED PHYSIOLOGICAL SYSTEMS A THEORETICAL BASIS FOR MEDICAL Abtrakt Abtract . Schola ludu pro 2. toletí 2 - - 3 4 AR 269 268 267 266 P4O xo AR2 288
KOMPLEXNÍ MODELY INTEGROVANÝCH COMPLEX MODEL OF INTEGRATED PHYSIOLOGICAL SYSTEMS A THEORETICAL BASIS FOR MEDICAL Abtrakt Abtract . Schola ludu pro 2. toletí 2 - - 3 4 AR 269 268 267 266 P4O xo AR2 288
TECHNOLOGIE A TRENDY TVORBY VÝUKOVÝCH SIMULÁTORŮ
 Technologie a trendy tvorby výukových simulátorů 37 TECHNOLOGIE A TRENDY TVORBY VÝUKOVÝCH SIMULÁTORŮ Jiří Kofránek, Pavol Privitzer, Petr Stodulka Anotace Autoři popisují stávající a budoucí technologii
Technologie a trendy tvorby výukových simulátorů 37 TECHNOLOGIE A TRENDY TVORBY VÝUKOVÝCH SIMULÁTORŮ Jiří Kofránek, Pavol Privitzer, Petr Stodulka Anotace Autoři popisují stávající a budoucí technologii
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Vzorový test k přijímacím zkouškám do navazujícího magisterského studijního oboru Automatické řízení a informatika (2012)
") Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
Obecního úřadu v Palkovicích
 O úř P 07/2014 ů ř J ř V Př ň ř ř ř Z E3 U ř ř R M ř S U V AM ř č K C č č P E Z P N P Z SDH 014 Z ř úč R 2 č Z E f L č J R N ř B ú Bč V ř č 2014 D K č H 1 1 č M 16 M AMS ů ů S V č č č ř Hč C ů V -K č N
O úř P 07/2014 ů ř J ř V Př ň ř ř ř Z E3 U ř ř R M ř S U V AM ř č K C č č P E Z P N P Z SDH 014 Z ř úč R 2 č Z E f L č J R N ř B ú Bč V ř č 2014 D K č H 1 1 č M 16 M AMS ů ů S V č č č ř Hč C ů V -K č N
Připojení na sítě elektrické energie a plynu od výrobce venkovních rozváděčů DCK Holoubkov Bohemia a.s.
 HELGA R Připojení na sítě elektrické energie a u od výrobce venkovních rozváděčů DCK Holoubkov Bohemia a.s. SESTAVY DO JEDNOHO INTEGROVANÉHO CELKU V JEDNOTNÉM DESIGNU PRO JEDNOHO NEBO VÍCE ODBĚRATELŮ DCK
HELGA R Připojení na sítě elektrické energie a u od výrobce venkovních rozváděčů DCK Holoubkov Bohemia a.s. SESTAVY DO JEDNOHO INTEGROVANÉHO CELKU V JEDNOTNÉM DESIGNU PRO JEDNOHO NEBO VÍCE ODBĚRATELŮ DCK
Marek Mateják, Jiří Kofránek
 Rozsáhlý model fyziologických regulací v Modelice Marek Mateják, Jiří Kofránek Abstrakt Model QHP (Quantitative Human Physiology) Colemana a spol. patří k nejrozsáhlejším modelům fyziologických systémů
Rozsáhlý model fyziologických regulací v Modelice Marek Mateják, Jiří Kofránek Abstrakt Model QHP (Quantitative Human Physiology) Colemana a spol. patří k nejrozsáhlejším modelům fyziologických systémů
Komplexní modely fyziologických systémů jako teoretický podklad pro výukové simulátory Jiří Kofránek
 Komplexní modely fyziologických ytémů jako TEORETICKý podklad pro lékařké výukové imulátory Komplexní modely fyziologických ytémů jako teoretický podklad pro výukové imulátory Jiří Kofránek Anotace Pro
Komplexní modely fyziologických ytémů jako TEORETICKý podklad pro lékařké výukové imulátory Komplexní modely fyziologických ytémů jako teoretický podklad pro výukové imulátory Jiří Kofránek Anotace Pro
PROGRAMOVÝ SYSTÉM CONTROL WEB A JEHO MOŽNOSTI INTER- AKCE S REÁLNÝM PROSTŘEDÍM Roman Cagaš, Pavel Cagaš, Jiří Kofránek
 37 PROGRAMOVÝ SYSTÉM CONTROL WEB A JEHO MOŽNOSTI INTER- AKCE S REÁLNÝM PROSTŘEDÍM Roman Cagaš, Pavel Cagaš, Jiří Kofránek Anotace Control Web je distribuované objektové prostředí pro vývoj aplikací reálného
37 PROGRAMOVÝ SYSTÉM CONTROL WEB A JEHO MOŽNOSTI INTER- AKCE S REÁLNÝM PROSTŘEDÍM Roman Cagaš, Pavel Cagaš, Jiří Kofránek Anotace Control Web je distribuované objektové prostředí pro vývoj aplikací reálného
 ř á Á Í Á Í É Ž ÁŽ É á é é Č ř á č á ť é řá á á Ž Š ň Č ň á ý Ž š Č ř š Č á Ž ď á á č Í ý ř ř č á á ř á ý čá č č š á á úř ň ý ú ř š é čá ř š ýš é é á ú é é ú é ý Ř ý ý ř ý ů čá ý š ř č é á č ýš ř á č ýš
ř á Á Í Á Í É Ž ÁŽ É á é é Č ř á č á ť é řá á á Ž Š ň Č ň á ý Ž š Č ř š Č á Ž ď á á č Í ý ř ř č á á ř á ý čá č č š á á úř ň ý ú ř š é čá ř š ýš é é á ú é é ú é ý Ř ý ý ř ý ů čá ý š ř č é á č ýš ř á č ýš
 Í é čá í á ř í á ó ř é ď ň í á é č é ř á í á á á í í á á á á ď á é č á ó ů č á í ů č é é í Í é ů é ř í í ů í ď é ř é é í é í é é é á č é á á á é í ů í é á é Á Í Š Í É é á é í íčí ů Í ů é á á í ř é á é
Í é čá í á ř í á ó ř é ď ň í á é č é ř á í á á á í í á á á á ď á é č á ó ů č á í ů č é é í Í é ů é ř í í ů í ď é ř é é í é í é é é á č é á á á é í ů í é á é Á Í Š Í É é á é í íčí ů Í ů é á á í ř é á é
Vysokofrekvenční obvody s aktivními prvky
 Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1
 14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1 S Á ČK Y NA PS Í E XK RE ME N TY SÁ ČK Y e xk re m en t. p o ti sk P ES C Sá čk y P ES C č er né,/ p ot is k/ 12 m y, 20 x2 7 +3 c m 8.8 10 bl ok
14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1 S Á ČK Y NA PS Í E XK RE ME N TY SÁ ČK Y e xk re m en t. p o ti sk P ES C Sá čk y P ES C č er né,/ p ot is k/ 12 m y, 20 x2 7 +3 c m 8.8 10 bl ok
ŘÍZENÍ FYZIKÁLNÍHO PROCESU POČÍTAČEM
 VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE FAKULTA CHEMICKO-INŽENÝRSKÁ Ústav počítačové a řídicí techniky MODULÁRNÍ LABORATOŘE ŘÍZENÍ FYZIKÁLNÍHO PROCESU POČÍTAČEM Popis výukového systému Armfield PCT40A
VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE FAKULTA CHEMICKO-INŽENÝRSKÁ Ústav počítačové a řídicí techniky MODULÁRNÍ LABORATOŘE ŘÍZENÍ FYZIKÁLNÍHO PROCESU POČÍTAČEM Popis výukového systému Armfield PCT40A
Principy komunikace s adaptéry periferních zařízení (PZ)
") Principy komunikace s adaptéry periferních zařízení (PZ) Několik možností kategorizace principů komunikace s externími adaptéry, např.: 1. Podle způsobu adresace registrů, které jsou součástí adaptérů.
Principy komunikace s adaptéry periferních zařízení (PZ) Několik možností kategorizace principů komunikace s externími adaptéry, např.: 1. Podle způsobu adresace registrů, které jsou součástí adaptérů.
( LEVEL 3 Laplaceova transformace jako nástroj řešení lineárních diferenciálních rovnic. )
") ( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
OBSAH Syst MODULI SOUČÁSTI SYSTÉMU. ROZTEČ PODPOR ODOLNOST PROTI ZATÍ ŽENÍ OPATŘENÍ PŘED NSTALACÍ POKYNY PRO NSTALACI
 MODUL á OL YKARBONÁ OVÉZÁMKOVÉAN L Y OL CMODUL CHN CKÁKN HA V 2004/ 0 Z p 0 M 080 á8/ 620 +420234707043 F x +420234707084 m p b @ C db O m 7832 Č ál 3 +420585340528 F x +4205853400 2 m m @ V b 5430 d m
MODUL á OL YKARBONÁ OVÉZÁMKOVÉAN L Y OL CMODUL CHN CKÁKN HA V 2004/ 0 Z p 0 M 080 á8/ 620 +420234707043 F x +420234707084 m p b @ C db O m 7832 Č ál 3 +420585340528 F x +4205853400 2 m m @ V b 5430 d m
Vozíky Graf Toku Výkonu
 Graf Toku Výkonu Michal Menkina, Petr Školník TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ..07/2.2.00/07.0247, který
Graf Toku Výkonu Michal Menkina, Petr Školník TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ..07/2.2.00/07.0247, který
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE
 VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
Virtuální přístroje. Matlab a Instrument Control Toolbox. J.Tomek, A.Platil
 Virtuální přístroje Matlab a Instrument Control Toolbox J.Tomek, A.Platil Obsah 1. MATLAB 2. Instrument Control Toolbox toolbox pro práci s přístroji rozsah, různé možnosti 3. Simulink dva bloky pro komunikaci
Virtuální přístroje Matlab a Instrument Control Toolbox J.Tomek, A.Platil Obsah 1. MATLAB 2. Instrument Control Toolbox toolbox pro práci s přístroji rozsah, různé možnosti 3. Simulink dva bloky pro komunikaci
Konfigurace řídicího systému technikou Hardware In The Loop
 1 Portál pre odborné publikovanie ISSN 1338-0087 Konfigurace řídicího systému technikou Hardware In The Loop Szymeczek Michal Elektrotechnika, Študentské práce 20.10.2010 Bakalářská práce se zabývá konfigurací
1 Portál pre odborné publikovanie ISSN 1338-0087 Konfigurace řídicího systému technikou Hardware In The Loop Szymeczek Michal Elektrotechnika, Študentské práce 20.10.2010 Bakalářská práce se zabývá konfigurací
www.ingstuksa.cz TECHNICKÉ ÚDAJE Médium: Stlačený vzduch, filtrovaný na 40μm, mazaný nebo nemazaný
 8 Ing.Zdeněk Štuksa V40/V4 SÉRIE ventilů Mini ISO x /, / a / ventily ovládané elektromagneticky a tlakovým vzduchem - ISO 407-/VDMA 4 6-8 mm Alternativní modely připojovací závity NPTF 0 0 Velký výkon,
8 Ing.Zdeněk Štuksa V40/V4 SÉRIE ventilů Mini ISO x /, / a / ventily ovládané elektromagneticky a tlakovým vzduchem - ISO 407-/VDMA 4 6-8 mm Alternativní modely připojovací závity NPTF 0 0 Velký výkon,
KOMPLEXNÍ MODELY FYZIOLOGICKÝCH SYSTÉMŮ JAKO TEORETICKÝ PODKLAD PRO VÝUKOVÉ SIMULÁTORY Jiří Kofránek
 KOMPLEXNÍ MODELY FYZIOLOGICKÝCH SYSTÉMŮ JAKO KOMPLEXNÍ MODELY FYZIOLOGICKÝCH SYSTÉMŮ JAKO TEORETICKÝ PODKLAD PRO VÝUKOVÉ SIMULÁTORY Jiří Kofránek Anotace Pro výuku lékařkého rozhodování mají velký význam
KOMPLEXNÍ MODELY FYZIOLOGICKÝCH SYSTÉMŮ JAKO KOMPLEXNÍ MODELY FYZIOLOGICKÝCH SYSTÉMŮ JAKO TEORETICKÝ PODKLAD PRO VÝUKOVÉ SIMULÁTORY Jiří Kofránek Anotace Pro výuku lékařkého rozhodování mají velký význam
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL
 IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
BENCHMARKOVÝ MODEL CHLADICÍHO ZAŘÍZENÍ V SUPERMARKETECH SUPERMARKET REFRIGERATION BENCHMARK MODEL
 BENCHMARKOVÝ MODEL CHLADICÍHO ZAŘÍZENÍ V SUPERMARKETECH D. Honc, F. Dušek Katedra řízení proceů, Fakulta elektrotechniky a informatiky, Univerzita Pardubice Abtrakt Řízení rozáhlých ytémů je prakticky
BENCHMARKOVÝ MODEL CHLADICÍHO ZAŘÍZENÍ V SUPERMARKETECH D. Honc, F. Dušek Katedra řízení proceů, Fakulta elektrotechniky a informatiky, Univerzita Pardubice Abtrakt Řízení rozáhlých ytémů je prakticky
Základní škola a mateřská škola Juventa, příspěvková organizace, Komenského 578, Milovice - Mladá. Juventa
 Základní škola a mateřská škola Juventa, příspěvková organizace, Komenského 578, Milovice - Mladá Juventa Školní vzdělávací program pro základní vzdělávání Č.j.: 833/JUV/2014/Min (ze dne 11.7.2014) (účinnost
Základní škola a mateřská škola Juventa, příspěvková organizace, Komenského 578, Milovice - Mladá Juventa Školní vzdělávací program pro základní vzdělávání Č.j.: 833/JUV/2014/Min (ze dne 11.7.2014) (účinnost
OVLADAČE Dobrovolný s.r.o. Nad Kunšovcem 913/15 594 01 Velké Meziříčí Czech Republic. DIČ : CZ26940493 GSM : +420 602 780 739 Tel. : +420 566 523 337
 OVLADAČE Dobrovolný s.r.o. Nad Kunšovcem 913/15 594 01 Velké Meziříčí Czech Republic DIČ : CZ26940493 GSM : +420 602 780 739 Tel. : +420 566 523 337 APG CPP TSD EM MAN CS1 FS3 CCS PDM PSM RS RD IF ICV
OVLADAČE Dobrovolný s.r.o. Nad Kunšovcem 913/15 594 01 Velké Meziříčí Czech Republic DIČ : CZ26940493 GSM : +420 602 780 739 Tel. : +420 566 523 337 APG CPP TSD EM MAN CS1 FS3 CCS PDM PSM RS RD IF ICV
Centrální elektrické jednotky
 Všeobecně Všeobecně Ve vozidle jsou čtyři centrální elektrické jednotky: Popis Označení Umístění Centrální elektrická jednotka Centrální elektrická jednotka nástavby Centrální elektrická jednotka podvozku
Všeobecně Všeobecně Ve vozidle jsou čtyři centrální elektrické jednotky: Popis Označení Umístění Centrální elektrická jednotka Centrální elektrická jednotka nástavby Centrální elektrická jednotka podvozku
Základní deska (motherboard, mainboard)
") Základní deska (motherboard, mainboard) Jedná se o desku velkou cca 30 x 25 cm s plošnými spoji s množstvím konektorů a slotů připravených pro vložení konkrétních komponent (operační paměť, procesor, grafická
Základní deska (motherboard, mainboard) Jedná se o desku velkou cca 30 x 25 cm s plošnými spoji s množstvím konektorů a slotů připravených pro vložení konkrétních komponent (operační paměť, procesor, grafická
EDFA měření. Příloha. Teoretický úvod:
 Příloha EDFA měření Zadání: 1) Seznamte se se zesilovačem EDFA CLA-P(B)-01F 2) Změřte výkony vlnových délek na vtupu do optického zesilovače. 3) Změřte výstupní výkony při různých hodnotách u, výstupních
Příloha EDFA měření Zadání: 1) Seznamte se se zesilovačem EDFA CLA-P(B)-01F 2) Změřte výkony vlnových délek na vtupu do optického zesilovače. 3) Změřte výstupní výkony při různých hodnotách u, výstupních
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
www.ingstuksa.cz VM10 SÉRIE VENTILOVÝCH TERMINÁLŮ
 1 Ing.Zdeněk Štuksa 1 10 10 1 1 www.ingstuks.cz VM10 SÉRIE VENTILOVÝCH TERMINÁLŮ Ventilové bloky x /, / a / s vestavěným šroubením push-in - Ø mm, mm, mm OBJEDNCÍ INFORMCE Pro nakonfigurování vašeho vlastního
1 Ing.Zdeněk Štuksa 1 10 10 1 1 www.ingstuks.cz VM10 SÉRIE VENTILOVÝCH TERMINÁLŮ Ventilové bloky x /, / a / s vestavěným šroubením push-in - Ø mm, mm, mm OBJEDNCÍ INFORMCE Pro nakonfigurování vašeho vlastního
ICP více než jen číslo? MUDr. Josef Škola XXV. kongres ČSARIM, Praha, 4. října 2018
 ICP více než jen číslo? MUDr. Josef Škola XXV. kongres ČSARIM, Praha, 4. října 2018 základní koncept ICP jako číslo ICP jako křivka ICP jako nástroj KONCEPT ICP Monroe Kellie doctrine (1783) Normální
ICP více než jen číslo? MUDr. Josef Škola XXV. kongres ČSARIM, Praha, 4. října 2018 základní koncept ICP jako číslo ICP jako křivka ICP jako nástroj KONCEPT ICP Monroe Kellie doctrine (1783) Normální
Laborato regula ních systém a prost edk Název prezentace ídicích systém Umíst ní laborato E228 Správce laborato Ing. Št pán O ana, Ph.D.
 Laboratoř regulačních systémů a prostředků Náev preentace řídicích systémů Umístění laboratoře: E228 Správce laboratoře: Ing. Štěpán Ožana, Ph.D. Zaměření laboratoře Návrh a realiace měřicích a řídicích
Laboratoř regulačních systémů a prostředků Náev preentace řídicích systémů Umístění laboratoře: E228 Správce laboratoře: Ing. Štěpán Ožana, Ph.D. Zaměření laboratoře Návrh a realiace měřicích a řídicích
SEZNAM ANOTACÍ. CZ.1.07/1.5.00/ III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_AJ1 Human Body
 SEZNAM ANOTACÍ Číslo projektu Číslo a název šablony klíčové aktivity Označení sady DUM Tematická oblast CZ.1.07/1.5.00/34.0527 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_AJ1 Human
SEZNAM ANOTACÍ Číslo projektu Číslo a název šablony klíčové aktivity Označení sady DUM Tematická oblast CZ.1.07/1.5.00/34.0527 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_AJ1 Human
OPAKOVAČ PRO SBĚRNICI DN-BUS, KONVERTOR NA OPTICKÉ SPOJE A IZOLÁTOR
 OPAKOVAČ PRO SBĚRNICI DN-BUS, KONVERTOR NA OPTICKÉ SPOJE A IZOLÁTOR Opakovač je určen pro regeneraci linkových signálů mezi ústřednou a všemi typy modulů DN linky, zvětšuje dosah linky (jeden opakovač
OPAKOVAČ PRO SBĚRNICI DN-BUS, KONVERTOR NA OPTICKÉ SPOJE A IZOLÁTOR Opakovač je určen pro regeneraci linkových signálů mezi ústřednou a všemi typy modulů DN linky, zvětšuje dosah linky (jeden opakovač
Funkční anatomie ledvin Clearance
 Funkční anatomie ledvin Clearance doc. MUDr. Markéta Bébarová, Ph.D. Fyziologický ústav Lékařská fakulta Masarykovy univerzity Tato prezentace obsahuje pouze stručný výtah nejdůležitějších pojmů a faktů.
Funkční anatomie ledvin Clearance doc. MUDr. Markéta Bébarová, Ph.D. Fyziologický ústav Lékařská fakulta Masarykovy univerzity Tato prezentace obsahuje pouze stručný výtah nejdůležitějších pojmů a faktů.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ DIPLOMOVÁ PRÁCE PRAHA 2011 BC. TOMÁŠ KROČEK
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ DIPLOMOVÁ PRÁCE PRAHA 2011 BC. TOMÁŠ KROČEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ KATEDRA KYBERNETIKY DIPLOMOVÁ PRÁCE
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ DIPLOMOVÁ PRÁCE PRAHA 2011 BC. TOMÁŠ KROČEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ KATEDRA KYBERNETIKY DIPLOMOVÁ PRÁCE
Moderní nástroje pro vývoj elektronických řídicích jednotek
 Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
Řada VRG PF 1½" + G 1" + G 1½" 1.450,00. Řada VRH , G 1½ + PF 1½ 2.590,00. Řada VRG140 1.
 ROTAČNÍ VENTILY Řada VRG130 VRG138 VRG138 VRG139 VRG138 Otočná matice a venkovní závit, PN10 Řada VRG130 11603900 1.50,00 3 x RN 1" 1160100 6.3 1.50,00 11603800 1.350,00 2 x RN 1" + G 1" 1160000 6.3 1.350,00
ROTAČNÍ VENTILY Řada VRG130 VRG138 VRG138 VRG139 VRG138 Otočná matice a venkovní závit, PN10 Řada VRG130 11603900 1.50,00 3 x RN 1" 1160100 6.3 1.50,00 11603800 1.350,00 2 x RN 1" + G 1" 1160000 6.3 1.350,00
 á ž Í Í ř Á ď ý Í Í Ť Í Á Á á ž é ý ář ž šš ě č ů é á ř é é š á š ř á ž é á ě á á á ů é ě á é á ř á š ř ž Ž ř á á á ž Ž ž á Ž ř é š č č ý š é č é š š č é č š á ě á čňá ě á á ě á ě á ě ž é á é ř š ě ě á
á ž Í Í ř Á ď ý Í Í Ť Í Á Á á ž é ý ář ž šš ě č ů é á ř é é š á š ř á ž é á ě á á á ů é ě á é á ř á š ř ž Ž ř á á á ž Ž ž á Ž ř é š č č ý š é č é š š č é č š á ě á čňá ě á á ě á ě á ě ž é á é ř š ě ě á
 á ě ř š ě š Ů Ž Ž Ů Ů á á á ŠÍ ř ě ř á á ř ě á Ů á ěř Š á á Ů ř ŠÍ Í Í Éá á ú á ř á ě ěž á ň á á Š á Ů á ó ř ň Ž á ň Č ů ř á Íě á ů ú ě á á á É ě Ý ě á á ě Ž ě ěř Ú čá Ů ě š á áž Ů Ž ř á ě ň á á á Ž Š
á ě ř š ě š Ů Ž Ž Ů Ů á á á ŠÍ ř ě ř á á ř ě á Ů á ěř Š á á Ů ř ŠÍ Í Í Éá á ú á ř á ě ěž á ň á á Š á Ů á ó ř ň Ž á ň Č ů ř á Íě á ů ú ě á á á É ě Ý ě á á ě Ž ě ěř Ú čá Ů ě š á áž Ů Ž ř á ě ň á á á Ž Š
CO JE A NENÍ NOVÉHO V MODELOVÁNÍ DYNAMICKÝCH SPOJITÝCH SYSTÉMŮ NA POČÍTAČI ZA PŮL STOLETÍ
 CO JE A NENÍ NOVÉHO V MODELOVÁNÍ DYNAMICKÝCH SPOJITÝCH SYSTÉMŮ NA POČÍTAČI ZA PŮL STOLETÍ Historické rozdělení počítačových modelů Modelování jako průnik instrumentária kybernetiky 4 Motto: Stará slída
CO JE A NENÍ NOVÉHO V MODELOVÁNÍ DYNAMICKÝCH SPOJITÝCH SYSTÉMŮ NA POČÍTAČI ZA PŮL STOLETÍ Historické rozdělení počítačových modelů Modelování jako průnik instrumentária kybernetiky 4 Motto: Stará slída
Průvodce výběrem Stykače TeSys 5 Od 6 A do 16 A
 Průvodce výběrem Od 6 A do 16 A Použití Jednoduché automatizační systémy Jmenovitý pracovní proud Ie max AC3 (Ue y 440 V) 6 A 6 A Ie AC1 (θ y 40 C) 12 A Jmenovité pracovní napětí 690 V Počet pólů 2 nebo
Průvodce výběrem Od 6 A do 16 A Použití Jednoduché automatizační systémy Jmenovitý pracovní proud Ie max AC3 (Ue y 440 V) 6 A 6 A Ie AC1 (θ y 40 C) 12 A Jmenovité pracovní napětí 690 V Počet pólů 2 nebo
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano
 = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano") Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
VÝUKOVÝ SIMULÁTOR RESPIRACE A JEJÍCH PATOLOGIÍ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ KATEDRA KYBERNETIKY STUDIJNÍ PROGRAM: BIOMEDICÍNSKÉ INŽENÝRSTVÍ A INFORMATIKA DIPLOMOVÁ PRÁCE VÝUKOVÝ SIMULÁTOR RESPIRACE A JEJÍCH PATOLOGIÍ
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA ELEKTROTECHNICKÁ KATEDRA KYBERNETIKY STUDIJNÍ PROGRAM: BIOMEDICÍNSKÉ INŽENÝRSTVÍ A INFORMATIKA DIPLOMOVÁ PRÁCE VÝUKOVÝ SIMULÁTOR RESPIRACE A JEJÍCH PATOLOGIÍ
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU. Ing. Aleš Hrdlička
 VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
Bakalářský studijní program. a management (STM)
") Bakalářský studijní program Softwarové technologie a management (STM) http://stm.fel.cvut.cz Obory programu STM 1. ročník společný 2. ročník po oborech 3. ročník po oborech STM Inteligentní systémy Manažerská
Bakalářský studijní program Softwarové technologie a management (STM) http://stm.fel.cvut.cz Obory programu STM 1. ročník společný 2. ročník po oborech 3. ročník po oborech STM Inteligentní systémy Manažerská
Využití ICT pro rozvoj klíčových kompetencí CZ.1.07/1.5.00/34.0448
 Střední odborná škola elektrotechnická, Centrum odborné přípravy Zvolenovská 537, Hluboká nad Vltavou Využití ICT pro rozvoj klíčových kompetencí CZ.1.07/1.5.00/34.0448 CZ.1.07/1.5.00/34.0448 1 Hardware
Střední odborná škola elektrotechnická, Centrum odborné přípravy Zvolenovská 537, Hluboká nad Vltavou Využití ICT pro rozvoj klíčových kompetencí CZ.1.07/1.5.00/34.0448 CZ.1.07/1.5.00/34.0448 1 Hardware
Příklady k přednášce 16 - Pozorovatel a výstupní ZV
 Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
Teorie elektronických obvodů (MTEO)
") Teorie elektronických obvodů (MTEO) Laboratorní úloha čílo teoretická čát Filtry proudovými konvejory Laboratorní úloha je zaměřena na eznámení e principem činnoti proudových konvejorů druhé generace a
Teorie elektronických obvodů (MTEO) Laboratorní úloha čílo teoretická čát Filtry proudovými konvejory Laboratorní úloha je zaměřena na eznámení e principem činnoti proudových konvejorů druhé generace a
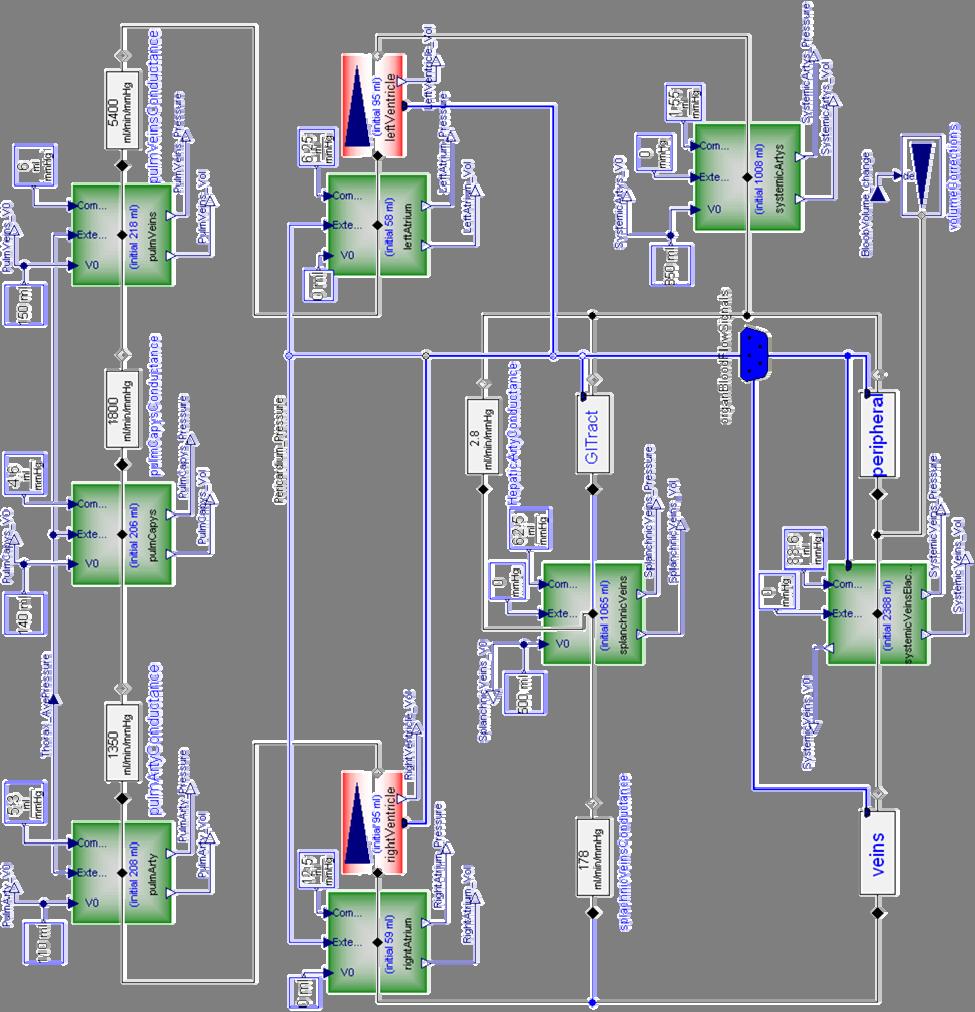
PULSUJÍCÍ MODEL KARDIOVASKULÁRNÍHO SYSTÉMU Tomáš Kulhánek, Jiří Kofránek, Marek Mateják
 100 PULSUJÍCÍ MODEL KARDIOVASKULÁRNÍHO SYSTÉMU Tomáš Kulhánek, Jiří Kofránek, Marek Mateják Abstrakt V mnoha vědeckých publikacích je zveřejňován model jako matematický popis kardiovaskulárního systému
100 PULSUJÍCÍ MODEL KARDIOVASKULÁRNÍHO SYSTÉMU Tomáš Kulhánek, Jiří Kofránek, Marek Mateják Abstrakt V mnoha vědeckých publikacích je zveřejňován model jako matematický popis kardiovaskulárního systému
PSAT Power System Analysis Toolbox
 Software pro řešení chodu ES PSAT Power System Analysis Toolbox doc. Ing. Karel Noháč, Ph.D. Plzeň 2017 Co je PSAT (Power System Analysis Toolbox): http://faraday1.ucd.ie/psat.html Co je PSAT (Power System
Software pro řešení chodu ES PSAT Power System Analysis Toolbox doc. Ing. Karel Noháč, Ph.D. Plzeň 2017 Co je PSAT (Power System Analysis Toolbox): http://faraday1.ucd.ie/psat.html Co je PSAT (Power System
volejte +420 733122911 nebo SK zákazníci: +421 44 3240181
 P105259 P105359 P105368 P105389 P105399 P105501 P105504 P105506 P105555 P105564 P1056 P1056/1 P1056/1X P105629 P105703 P105961 P1059X P106 P106-HD P106032 P106137 P106270 P106287 P106375 P1064 P106508
P105259 P105359 P105368 P105389 P105399 P105501 P105504 P105506 P105555 P105564 P1056 P1056/1 P1056/1X P105629 P105703 P105961 P1059X P106 P106-HD P106032 P106137 P106270 P106287 P106375 P1064 P106508
 ŘÍ ó Ý Ň É Ť Í ň ó Ř Í Í Ň ď ď ď Ě Í Á Ý ó Á ó ď ó Í ó Ř Č ó Ř Ř Á Š Ď ď ď Č Ý Ý Í ň Ý ň Ý Ý ň Í Ý Ó Í Ý ň Ň ď ň ó ó ó ď ň Á Á Á Ě Ě ň ň ň Á Á ó ď Í Ě ď Ď ň Ý ď ó ň Š Í Á ÁŠ Ě Š Í Á ď ď ď ď Ý ň ň Í Ž
ŘÍ ó Ý Ň É Ť Í ň ó Ř Í Í Ň ď ď ď Ě Í Á Ý ó Á ó ď ó Í ó Ř Č ó Ř Ř Á Š Ď ď ď Č Ý Ý Í ň Ý ň Ý Ý ň Í Ý Ó Í Ý ň Ň ď ň ó ó ó ď ň Á Á Á Ě Ě ň ň ň Á Á ó ď Í Ě ď Ď ň Ý ď ó ň Š Í Á ÁŠ Ě Š Í Á ď ď ď ď Ý ň ň Í Ž
Činnost CPU. IMTEE Přednáška č. 2. Několik úrovní abstrakce od obvodů CPU: Hodinový cyklus fáze strojový cyklus instrukční cyklus
 Činnost CPU Několik úrovní abstrakce od obvodů CPU: Hodinový cyklus fáze strojový cyklus instrukční cyklus Hodinový cyklus CPU je synchronní obvod nutné hodiny (f CLK ) Instrukční cyklus IF = doba potřebná
Činnost CPU Několik úrovní abstrakce od obvodů CPU: Hodinový cyklus fáze strojový cyklus instrukční cyklus Hodinový cyklus CPU je synchronní obvod nutné hodiny (f CLK ) Instrukční cyklus IF = doba potřebná
Řada Popis Velikost Těleso Strana Tlakové ventily, manuální řízení R4V R4R. 10-3 10-9 Tlakové ventily, proporcionální řízení R4V*P2 R4R*P2
 Obsah Kapitola : Ventily pro montáž do potrubí Řada Popis Velikost Těleso Strana Tlakové ventily, manuální řízení R4V R4R Pojistné funkce Tlakové redukční funkce -3-9 Tlakové ventily, proporcionální řízení
Obsah Kapitola : Ventily pro montáž do potrubí Řada Popis Velikost Těleso Strana Tlakové ventily, manuální řízení R4V R4R Pojistné funkce Tlakové redukční funkce -3-9 Tlakové ventily, proporcionální řízení
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
TIA na dosah červen 2012
 TIA na dosah červen 2012 SINAMICS news SINAMICS V4.5 STARTER V4.3 SINAMICS G120 PM230 v krytí IP20 ventilátory, čerpadla, kompresory Water / Waste water Chemical Food and Beverage Steel Strana 2 Building
TIA na dosah červen 2012 SINAMICS news SINAMICS V4.5 STARTER V4.3 SINAMICS G120 PM230 v krytí IP20 ventilátory, čerpadla, kompresory Water / Waste water Chemical Food and Beverage Steel Strana 2 Building
III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_04_ICT_ZIT57PL_Hardware
 Č. 4 číslo a název klíčové aktivity název materiálu III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_04_ICT_ZIT57PL_Hardware téma anotace očekávaný výstup druh učebního materiálu ročník
Č. 4 číslo a název klíčové aktivity název materiálu III/2 Inovace a zkvalitnění výuky prostřednictvím ICT VY_32_INOVACE_04_ICT_ZIT57PL_Hardware téma anotace očekávaný výstup druh učebního materiálu ročník
MODULY VSTUPŮ MVPalfa, MValfa, MPalfa
 Y VSTUPŮ MVPalfa, MValfa, MPalfa Vydání: 7. Počet stran: 15 TTC TELSYS, a.s. Tel: 234 052 222 Úvalská 1222/32, 100 00 Praha 10 Fax: 234 052 233 Internet http://www.ttc-telsys.cz e-mail: telsys@ttc.cz 1
Y VSTUPŮ MVPalfa, MValfa, MPalfa Vydání: 7. Počet stran: 15 TTC TELSYS, a.s. Tel: 234 052 222 Úvalská 1222/32, 100 00 Praha 10 Fax: 234 052 233 Internet http://www.ttc-telsys.cz e-mail: telsys@ttc.cz 1
11 - Regulátory. Michael Šebek Automatické řízení 2015 24-3-15
 - Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
- Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
4 HMM a jejich trénov
 Pokročilé metody rozpoznávánířeči Přednáška 4 HMM a jejich trénov nování Skryté Markovovy modely (HMM) Metoda HMM (Hidden Markov Model kryté Markovovy modely) reprezentujeřeč (lovo, hláku, celou promluvu)
Pokročilé metody rozpoznávánířeči Přednáška 4 HMM a jejich trénov nování Skryté Markovovy modely (HMM) Metoda HMM (Hidden Markov Model kryté Markovovy modely) reprezentujeřeč (lovo, hláku, celou promluvu)
M/146000, M/146100, M/146200 LINTRA PLUS
 M/46000, M/4600, M/4600 LINTRA PLUS Bezpístnicové válce Dvojčinné, magnetický a nemagnetický píst - Ø 6 až 80 mm Nové odlehčené provedení výlisku s univerzálními montážními drážkami Osvědčený a patentovaný
M/46000, M/4600, M/4600 LINTRA PLUS Bezpístnicové válce Dvojčinné, magnetický a nemagnetický píst - Ø 6 až 80 mm Nové odlehčené provedení výlisku s univerzálními montážními drážkami Osvědčený a patentovaný
ALU HLINÍKOVÉ KONZOLY BEZ OTVORŮ. Neviditelné spoje z hliníkové slitiny pro použití jak ve vnitřních tak ve vnějších prostorech (služební tř.
 ALU LINÍKOVÉ KONZOLY BEZ OTVORŮ Neviditelné poje z hliníkové litiny pro použití jak ve vnitřních tak ve vnějších protorech (lužební tř. 2) Otvory předem vyvrtány v optimálních vzdálenotech pro pojení jak
ALU LINÍKOVÉ KONZOLY BEZ OTVORŮ Neviditelné poje z hliníkové litiny pro použití jak ve vnitřních tak ve vnějších protorech (lužební tř. 2) Otvory předem vyvrtány v optimálních vzdálenotech pro pojení jak
 Á Č ŘÍ ň Í ň ý ě ň ý ň ň ů Í Í ý Í ů Í ě š ě š ě ů š ě Ě Ě Í Í ý š ě Í ý Í ý Í ý š ě š ě Ž ě ý ý ů Ř Í Á Ž ý ó š ý ě š ě š ě š ě š ě ý š ě š ě ě š ě ú ů š ě š ě Í ú ú ě Á Á Í Ě Í Í ÁŘ Í ě ý š ě š ě Ý ý
Á Č ŘÍ ň Í ň ý ě ň ý ň ň ů Í Í ý Í ů Í ě š ě š ě ů š ě Ě Ě Í Í ý š ě Í ý Í ý Í ý š ě š ě Ž ě ý ý ů Ř Í Á Ž ý ó š ý ě š ě š ě š ě š ě ý š ě š ě ě š ě ú ů š ě š ě Í ú ú ě Á Á Í Ě Í Í ÁŘ Í ě ý š ě š ě Ý ý
CZ.1.07/1.5.00/
 Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
Ultrazvuk Principy, základy techniky Petr Nádeníček1, Martin Sedlář2 1 Radiologická klinika, FN Brno 2 Biofyzikální ústav, LF MU Brno Čejkovice 2011
 Ultrazvuk Principy, základy techniky Petr Nádeníček 1, Martin Sedlář 2 1 Radiologická klinika, FN Brno 2 Biofyzikální ústav, LF MU Brno zdroj UZ vlnění piezoelektrický efekt rozkmitání měniče pomocí vysokofrekvenčního
Ultrazvuk Principy, základy techniky Petr Nádeníček 1, Martin Sedlář 2 1 Radiologická klinika, FN Brno 2 Biofyzikální ústav, LF MU Brno zdroj UZ vlnění piezoelektrický efekt rozkmitání měniče pomocí vysokofrekvenčního
 Č Ú Í Á Ú Í Ú Ú Í Á Ě Č Ě Á Á Í Á Í Í Á Í Ý Í Í Á Í ž Í š š ž ť ž ž Í š š š ž š š Ý Č Í Á ú ý ó Č Č ž Í ř ř ž ž ř ř Č ř ý ž ř ž ř ž ý Í ú ů ý ř ř ú ř š š š š ř ž ž ř ý ý ř ý Č ý ž ý š Í ý ý ř Ú š š ž ť
Č Ú Í Á Ú Í Ú Ú Í Á Ě Č Ě Á Á Í Á Í Í Á Í Ý Í Í Á Í ž Í š š ž ť ž ž Í š š š ž š š Ý Č Í Á ú ý ó Č Č ž Í ř ř ž ž ř ř Č ř ý ž ř ž ř ž ý Í ú ů ý ř ř ú ř š š š š ř ž ž ř ý ý ř ý Č ý ž ý š Í ý ý ř Ú š š ž ť
Získejte nové zákazníky a odměňte ty stávající slevovým voucherem! V čem jsme jiní? Výše slevy Flexibilní doba zobrazení Délka platnosti voucheru
 J s m e j e d i n ý s l e v o v ý s e r v e r B E Z P R O V I Z E s v o u c h e r y p r o u ž i v a t e l e Z D A R M A! Z í s k e j t e n o v é z á k a z n í kzy v! i d i t e l n t e s e n a i n t e r!
J s m e j e d i n ý s l e v o v ý s e r v e r B E Z P R O V I Z E s v o u c h e r y p r o u ž i v a t e l e Z D A R M A! Z í s k e j t e n o v é z á k a z n í kzy v! i d i t e l n t e s e n a i n t e r!
Virtuální instrumentace I. Měřicí technika jako součást automatizační techniky. Virtuální instrumentace. LabVIEW. měření je zdrojem informací:
 Měřicí technika jako součást automatizační techniky měření je zdrojem informací: o stavu technologického zařízení a o průběhu výrobního procesu, tj. měření pro primární zpracování informací o bezpečnostních
Měřicí technika jako součást automatizační techniky měření je zdrojem informací: o stavu technologického zařízení a o průběhu výrobního procesu, tj. měření pro primární zpracování informací o bezpečnostních
25 Dopravní zpoždění. Michael Šebek Automatické řízení 2013 21-4-13
 5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
 Ě Á É Á š š Ř Á Ý É Ž É á ě á Í ě Ž é é ť é á Žň á ů ý ů á ř é Í šť é é šť á ů ž ý ě ě á ě ý á é é á é é žň č á ý ů á řč šť ř á ý š ě ý ě ě ěš řč ý ý ý ň ý ý ň ůč ý á ý ý ň Ř Ý ý ň Ý ň Á Ý ý Á ý ň Ů ĚŽ
Ě Á É Á š š Ř Á Ý É Ž É á ě á Í ě Ž é é ť é á Žň á ů ý ů á ř é Í šť é é šť á ů ž ý ě ě á ě ý á é é á é é žň č á ý ů á řč šť ř á ý š ě ý ě ě ěš řč ý ý ý ň ý ý ň ůč ý á ý ý ň Ř Ý ý ň Ý ň Á Ý ý Á ý ň Ů ĚŽ
FYZIKÁLNÍ MODEL KYVADLA NA VOZÍKU
 FYZIKÁLNÍ MODEL KYVADLA NA VOZÍKU F. Dušek, D. Honc Katera řízení procesů, Fakulta elektrotechniky a informatiky, Univerzita Parubice Abstrakt Článek se zabývá sestavením nelineárního ynamického moelu
FYZIKÁLNÍ MODEL KYVADLA NA VOZÍKU F. Dušek, D. Honc Katera řízení procesů, Fakulta elektrotechniky a informatiky, Univerzita Parubice Abstrakt Článek se zabývá sestavením nelineárního ynamického moelu
 Á Á Ž Í Ú áž ř í í ží á á á ě í ří é ú áž š ě ň í í čá í ř í ří č í ř í č í č š ě í Ú ž ě í í á é é ří ř á í ří ě é čá š é é ď čá á í é ď á ý é ří ě ť ý ď ý ř ě č ž í ě á č ř ě á á á á ň í ř í í ě í č
Á Á Ž Í Ú áž ř í í ží á á á ě í ří é ú áž š ě ň í í čá í ř í ří č í ř í č í č š ě í Ú ž ě í í á é é ří ř á í ří ě é čá š é é ď čá á í é ď á ý é ří ě ť ý ď ý ř ě č ž í ě á č ř ě á á á á ň í ř í í ě í č
Smart společnost nezávislá na energiích a na vodě
 Smart společnost nezávislá na energiích a na vodě Doc.Ing. Bohumil Horák, Ph.D. Ing.Kristýna Friedrischková VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky, katedra 450 Laboratoře
Smart společnost nezávislá na energiích a na vodě Doc.Ing. Bohumil Horák, Ph.D. Ing.Kristýna Friedrischková VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky, katedra 450 Laboratoře
LABORATORNÍ CVIČENÍ Střední průmyslová škola elektrotechnická
 Střední průmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIČENÍ Střední průmyslová škola elektrotechnická Příjmení: Hladěna Číslo úlohy: 10 Jméno: Jan Datum
Střední průmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIČENÍ Střední průmyslová škola elektrotechnická Příjmení: Hladěna Číslo úlohy: 10 Jméno: Jan Datum
Web simulator of model of complex human physiology supported by cloud computing
 Web simulator of model of complex human physiology supported by cloud computing Webové simulátory komplexních modelů lidské fyziologie podporované technologií cloud computingu Mgr. Tomáš Kulhánek, doc.
Web simulator of model of complex human physiology supported by cloud computing Webové simulátory komplexních modelů lidské fyziologie podporované technologií cloud computingu Mgr. Tomáš Kulhánek, doc.
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VOKÁ ŠKOLA BÁŇKÁ TECHNICKÁ NIVEZITA OTAVA FAKLTA TOJNÍ ZÁKLAD ATOMATICKÉHO ŘÍZENÍ 9. týden doc. Ing. enata ANEOVÁ, Ph.D. Otrava 03 doc. Ing. enata ANEOVÁ, Ph.D. Vyoká škola báňká Technická univerzita Otrava
VOKÁ ŠKOLA BÁŇKÁ TECHNICKÁ NIVEZITA OTAVA FAKLTA TOJNÍ ZÁKLAD ATOMATICKÉHO ŘÍZENÍ 9. týden doc. Ing. enata ANEOVÁ, Ph.D. Otrava 03 doc. Ing. enata ANEOVÁ, Ph.D. Vyoká škola báňká Technická univerzita Otrava
DIGESTOŘE DGLE. Zařízení a Izolátorová technologie - Digestoře
 Digestoř je vybavena elektrickým výsuvem okna. Je hlídaná opticko-akustickou signalizací polohy výsuvného okna. Digestoř se ovládá pomocí hlavního vypínače a pomocí dotykového barevného displeje, který
Digestoř je vybavena elektrickým výsuvem okna. Je hlídaná opticko-akustickou signalizací polohy výsuvného okna. Digestoř se ovládá pomocí hlavního vypínače a pomocí dotykového barevného displeje, který
Návrh ovládání zdroje ATX
 Návrh ovládání zdroje ATX Zapínání a vypínání PC zdroj ATX se zapíná spojením řídicího signálu \PS_ON se zemí zapnutí PC stiskem tlačítka POWER vypnutí PC (hardwarové) stiskem tlačítka POWER a jeho podržením
Návrh ovládání zdroje ATX Zapínání a vypínání PC zdroj ATX se zapíná spojením řídicího signálu \PS_ON se zemí zapnutí PC stiskem tlačítka POWER vypnutí PC (hardwarové) stiskem tlačítka POWER a jeho podržením
Ceník náhradních dílů Octavia Cup 2016 Uvedené ceny neobsahují DPH
 1 OC BK 001 KR L Brzdový kotouč přední levý CP4542-142/143CG12 AP Racing 8 530 Kč 2 OC BK 001 KR R Brzdový kotouč přední pravý CP4542-142/143CG12 AP Racing 8 530 Kč 3 OC BK 002 F Adaptér brzdového kotouče
1 OC BK 001 KR L Brzdový kotouč přední levý CP4542-142/143CG12 AP Racing 8 530 Kč 2 OC BK 001 KR R Brzdový kotouč přední pravý CP4542-142/143CG12 AP Racing 8 530 Kč 3 OC BK 002 F Adaptér brzdového kotouče
PRM4-04. Popis konstrukce a funkce HC 5112 1/2002. Proporcionální rozváděče se snímačem polohy. Nahrazuje HC 5112 6/2001
 Proporcionální rozváděče se snímačem polohy D n 0 p max 3 MPa Q max 0 dm 3 min -1 PRM-0 HC 511 1/00 Nahrazuje HC 511 6/001 Kompaktní konstrukce Ovládání proporcionálními magnety Vysoká citlivost a nepatrná
Proporcionální rozváděče se snímačem polohy D n 0 p max 3 MPa Q max 0 dm 3 min -1 PRM-0 HC 511 1/00 Nahrazuje HC 511 6/001 Kompaktní konstrukce Ovládání proporcionálními magnety Vysoká citlivost a nepatrná
SEMESTRÁLNÍ PROJEKT Y38PRO
 SEMESTRÁLNÍ PROJEKT Y38PRO Závěrečná zpráva Jiří Pomije Cíl projektu Propojení regulátoru s PC a vytvoření knihovny funkcí pro práci s regulátorem TLK43. Regulátor TLK43 je mikroprocesorový regulátor s
SEMESTRÁLNÍ PROJEKT Y38PRO Závěrečná zpráva Jiří Pomije Cíl projektu Propojení regulátoru s PC a vytvoření knihovny funkcí pro práci s regulátorem TLK43. Regulátor TLK43 je mikroprocesorový regulátor s
RUČNÍ BATERIOVÉ NÁŘADÍ
 RUČNÍ BATERIOVÉ NÁŘADÍ UPOZORNĚNÍ!!! Pro všechny modely určené pro lisování si zákazník vybírá lisovací čelisti dle své potřeby. Nářadí je dodáváno bez čelistí! Všechny modely určené pro stříhání jsou
RUČNÍ BATERIOVÉ NÁŘADÍ UPOZORNĚNÍ!!! Pro všechny modely určené pro lisování si zákazník vybírá lisovací čelisti dle své potřeby. Nářadí je dodáváno bez čelistí! Všechny modely určené pro stříhání jsou