Programování průmyslových robotů. Ing. Adam Chromý
|
|
|
- Milada Němcová
- před 6 lety
- Počet zobrazení:
Transkript
1 Ing. Adam Chromý
2 Co je průmyslový robot? definice dle ISO 8373:2012: Průmyslový robot je poháněné zařízení programovatelné ve dvou nebo více osách s určitým stupněm samostatnosti, pohybující se uvnitř omezeného prostředí, a za účelem plnění úkolu. Samostatností je v tomto kontextu myšlena schopnost provádět určený úkol v závislosti na aktuálním stavu a za současného vnímání okolí, a to samostatně, bez zásahu člověka. 2/77
3 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 3/77
4 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 4/77
 pohyb v 5 DOF, včetně uchopení a otáčení úchopu jediný motor, reléově spínané p evodovky ízeno pomocí děrného")
5 Počátky průmyslové robotiky 1937 první průmyslový robot dle ISO Griffith P. Taylor, Toronto, stavebnice Meccano (Merkur) pohyb v 5 DOF, včetně uchopení a otáčení úchopu jediný motor, reléově spínané p evodovky ízeno pomocí děrného štítku umožňoval p enášet d evěné bloky dle p edem naprogramovaného schématu 5/77
6 Počátky průmyslové robotiky 50. léta 20. století GE Yes-Man, 1956 první roboty použitelné pro praktické aplikace první teleoperátory stroje pro vykonávání činnosti na dálku vyvíjeny původně pro atomový průmysl, nasazeny v hutnictví, strojírenství,... nesplňují definici dle ISO, ale mají své uplatnění v průmyslu 6/77






7 Počátky průmyslové robotiky GE Yes-Man, léta 20. století první roboty použitelné pro Teleoperátory praktické aplikace zprost edkovávají dálkové vnímání a působení první teleoperátory nepracují samostatně, nutný operátor stroje pro vykonávání Komunik. kanál činnosti na dálku Vizualizace vjemů pro vyvíjeny původně atomový průmysl, nasazeny v hutnictví, strojírenství,... Snímání nesplňují definici pohybůdle ISO, ale mají své uplatnění v průmyslu Snímání vjemů Silové působení 7/77

8 Počátky průmyslové robotiky 50. léta 20. století GE Yes-Man, 1956 Průmyslový robot je poháněné zařízení první roboty použitelné pro programovatelné praktické aplikace ve dvou nebo více osách s určitým stupněm samostatnosti, pohybující se první teleoperátory uvnitř omezeného prostředí, a za účelem plnění stroje pro vykonávání úkolu. Samostatností je v tomto kontextu činnosti na dálku myšlena vyvíjeny schopnost původně pro provádět určený úkol v závislosti na aktuálním stavu a za současného atomový průmysl, nasazeny v hutnictví, strojírenství,... vnímání okolí, a to samostatně, bez zásahu nesplňují definici dle ISO, člověka. ale mají své uplatnění v průmyslu 8/77
9 Počátky průmyslové robotiky 50. léta 20. století GE Yes-Man, 1956 první roboty použitelné pro praktické aplikace první teleoperátory stroje pro vykonávání činnosti na dálku vyvíjeny původně pro atomový průmysl, nasazeny v hutnictví, strojírenství,... nesplňují definici dle ISO, ale mají své uplatnění v průmyslu 9/77


10 Počátky průmyslové robotiky GE Yes-Man, 1956 MASCOT, /77

 započal bou livý")
11 Počátky průmyslové robotiky 1961 robot UNIMATE G.Devol, firma Unimation použit pro urychlení výroby aut a zvýšení bezpečnosti práce v General Motors p enášení těžkých součástek z lité oceli a jejich sva ování p ímé programování (ukládání kloubových sou adnic) započal bou livý rozvoj průmyslových robotů 11/77

 nová využití stacionárních robotů i mimo průmysl chirurgické")
12 Počátky průmyslové robotiky léta do robotiky proniká mnoho nových firem (ABB, KUKA, FANUC, Epson, Adept,...) nová využití stacionárních robotů i mimo průmysl chirurgické roboty (1983) rehabilitační roboty (1řŘř) umělé končetiny vesmírný program vojenská robotika... 12/77
13 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 13/77
 uspo ádání pevných ramen a kloubů articulated (robotické rameno) jen otočné klouby cartesian, gantry, linear jen posuvné klouby SCARA dva otočné klouby a jeden")
14 Základní parametry Počet stupňů volnosti (Degrees of freedom, Number of axes) bod v rovině 2DOF, bod v 3D 3DOF, plná kontrola 6DOF mohou mít i více DOF: úchop (grab), pojezd na kolejnici,... Kinematická koncepce (Kinematics) uspo ádání pevných ramen a kloubů articulated (robotické rameno) jen otočné klouby cartesian, gantry, linear jen posuvné klouby SCARA dva otočné klouby a jeden posuvný válcová dva posuvné klouby na otočné základně... 14/77
15 Základní parametry Pracovní prostor (Working envelope, Operational area) oblast, do které robot dosáhne závisí na kinematické koncepci, počtu DOF a rozměrech ramen Rychlost (Speed), Zrychlení (Acceleration) maximální rychlost/zrychlení pohybu kloubů nízké zrychlení = rychlost nelze na krátké vzdálenosti dosáhnout Užitečné zatížení (Carying capacity, Payload) jaký náklad unese koncový bod manipulátoru často je nutné ešit v závislosti na uvažovaném zrychlení 15/77
16 Základní parametry P esnost (Accuracy) maximální odchylka pozice manipulátoru od požadované pozice může být zlepšena zavedením vnější zpětné vazby nebo kalibrací absolutní chyba (odchylka mě ené hodnoty od správné) Opakovatelnost (Repeatabilty) s jakou p esností je robot schopen vrátit se do stejné polohy zásadní parametr robotů rozptyl mě ení (v jakém rozmezí se hodnoty nachází) 16/77
 nebo kalibrací jakým způsobem se p enáší síla z motoru na kloub absolutní chyba (odchylka mě ené hodnoty od správné)p ímé (Direct Drive) nutný velký moment motoru P evodovka (Gear Drive)")
17 Základní parametry P esnost (Accuracy) maximální odchylka pozice manipulátoru od požadované P esnostpozice a opakovatelnost ovlivňuje: může být zlepšena zavedením vnější zpětné vazby P evodování (Drive) nebo kalibrací jakým způsobem se p enáší síla z motoru na kloub absolutní chyba (odchylka mě ené hodnoty od správné)p ímé (Direct Drive) nutný velký moment motoru P evodovka (Gear Drive) mohou vznikat vůle Opakovatelnost (Repeatabilty) Harmonické (Harmonic Drive) eliminace vůle s jakou p esností je robot schopen vrátit se do Tuhost ramen (Compliance) stejné polohy jak moc se koncový bod pohne p i působení vnějších zásadní parametr robotů sil na rameno rozptyl mě ení (v jakém rozmezí se hodnoty nachází) 17/77
18 Základní parametry P esnost (Accuracy) maximální odchylka pozice manipulátoru od požadované pozice může být zlepšena zavedením vnější zpětné vazby nebo kalibrací absolutní chyba (odchylka mě ené hodnoty od správné) Opakovatelnost (Repeatabilty) s jakou p esností je robot schopen vrátit se do stejné polohy zásadní parametr robotů rozptyl mě ení (v jakém rozmezí se hodnoty nachází) 18/77
19 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 19/77
20 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Po adí bodů v trajektorii elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 20/77
21 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Po adí bodů v trajektorii elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 21/77
22 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Očekávaná trajektorie elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 22/77
 Reálná trajektorie elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější,")
23 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Reálná trajektorie elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 23/77
.")
24 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source)... nebo dokonce takto elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 24/77
 Reálná CP trajektorie elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické")
25 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Reálná CP trajektorie elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 25/77
26 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Toto je také CP trajektorie! elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 26/77
: ízení pohybu (Motion control) PTP Point to point (PTP) jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP) složitější, kompletní definice pohybu, někdy nemusí mít")
27 Základní parametry Jiný význam PTP a CP (nap. u Epson): ízení pohybu (Motion control) PTP Point to point (PTP) jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP) složitější, kompletní definice pohybu, někdy nemusí mít ešení CP Napájení motorů (Power source) Toto je také CP trajektorie! elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 27/77
28 Základní parametry ízení pohybu (Motion control) Point to point (PTP, diskrétní): pro jednodušší aplikace, není definován pohyb mezi body Countinuous Path (CP, spojité): složitější, kompletní definice pohybu, někdy však nemusí mít ešení Napájení motorů (Power source) Toto je také CP trajektorie! elektrické rychlejší, ale slabší; rotační; nelze je použít ve výbušném prost edí hydraulické silnější, ale pomalejší; posuvné; vhodné i do výbušného prost edí 28/77
29 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 29/77
30 Průmyslové manipulátory drtivá většina robotů jsou průmyslové manipulátory (ř0%) dle IFR na světě 1,5 mil. operujících průmyslových robotů Nejčastější aplikace: video na YouTube (4:32) souvislé svá ení (arc welding), bodové svá ení (spot welding) p ekládání,nakládání a vykládání materiálu (material handling) automatizovaná obsluha p ístrojů (machine tending) st íkání tekutých a práškových barev, laků (painting) p enášení, balení, skládání, vkládání a paletizace (palletizing) instalace a kompletace součástí výrobku (assembly) mechanické ezání, broušení, leštění, smirkování nanášení lepidel, těsniv, tlumicích materiálů, pěnování kontrolní mě ení mě ení pomocí kamer, laseru a čidel 30/77

 systém Da Vinci")
31 Chirurgické roboty funkce silového děliče umožňuje mikroposuvy a p esné pohyby ovládání pohyby jako u klasické operace nebo p es PC (joysticky) systém Da Vinci 31/77
32 Chirurgické roboty Robotický systém Da Vinci pův. pro US Army jeden chirurg pro více letadlových lodí princip: výhody: chirurg není stresován nemusí stát, může v klidu sedět vyšší p esnost pozicování nástroje => minimální invazivnost operace => menší krvácení, bolest, rychlejší hojení, menší rizika t etí ruka, kontrola zano ení nástroje, zoom,... => kvalitnější výkon SW omezení prudkých pohybů, apod. => vyšší bezpečnost možnost operace na dálku (ne p íliš časté) nevýhody: cena systému 45 mil. Kč + každá nástroj 100 tis. Kč => ř v ČR 32/77
")
33 Stomatologický robot Stomatologický 3D robot CEREC ušet í se čas, náhrada je p esnější a estetičtější zamě ení zubní čelisti a tvorba 3D modelu modelování nového zubu frézování zubu z keramického bločku implantace zubu ukázka: Youtube (od času 1:50) 33/77
34 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 34/77
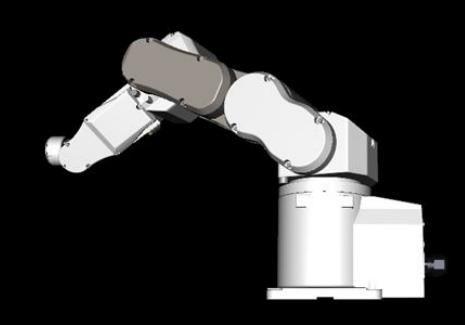
35 Manipulátor Epson C3 Základní parametry Počet stupňů volnosti: 6 DOF Opakovatelnost: ± 0,02 mm Kinematická koncepce: articulated Maximální zatížení: 3 (5) kg P evodování: harmonic drive, emenový rozvod pohonu, elmag. brzdy ízení pohybu: PTP i CP Osy: AC servomotory ukázka: video na YouTube (1:35) 35/77

36 Manipulátor Epson C3 Pracovní prostor 36/77

37 Manipulátor Epson C3 Osy manipulátoru J1: 400 W, 102 Nm, 450 /s, ± 170 J2: 400 W, 102 Nm, 450 /s, -160 až +65 J3: 150 W, 33 Nm, 514 /s, -51 až +225 J4: 50 W, 10 Nm, 553 /s, ± 200 všechny osy J5: 50 W, 10 Nm, poháněny AC 553 /s, ± 135 servomotory s J6: 50 W, 8 Nm, harmonickými p evodovkami 720 /s, ± /77
38 Manipulátor Epson C3 Enkodéry v osách inkrementální snímače velmi vysoké rozlišení je základním p edpokladem pro vysokou opakovatelnost J1: 233 pulzů na stupeň J2: 233 pulzů na stupeň J3: 204 pulzů na stupeň J4: 188 pulzů na stupeň J5: 191 pulzů na stupeň J6: 145 pulzů na stupeň 38/77


39 Manipulátor Epson C3 Vnit ní ešení p evodování Harmonická p evodovka Kloub emenový rozvod pohonu Elektromagnetická brzda AC Motor 39/77
40 Manipulátor Epson C3 Různé možnosti montáže 40/77
41 Manipulátor Epson C3 Další parametry ř vodičů protažených skrze robot pro uživatelské aplikace (ovládání nástrojů, apod.) max. 30V, 1A 4 protažené pneumatické hadice pro uživatejské pneumatické nástroje (max. 0,59 MPa) 41/77
 kg ProSix S5: 706 mm, 5 (7) kg ProSix S5L: 895 mm, 5 (7) kg")
42 Šestiosé manipulátory Epson liší se v dosahu ramene a nosnosti: ProSix C3: 600 mm, 3 (5) kg ProSix S5: 706 mm, 5 (7) kg ProSix S5L: 895 mm, 5 (7) kg 42/77
43 Schéma ízení 43/77
44 ídicí jednotka RC1Ř0 jedna unifikovaná ídicí jednotka vybavena 32 bitovým MCU, embedded systém bez HDD, Flash paměť na program základní rozhraní: Ethernet, USB volitelné rozhraní: I/O modul, Fieldbus, RS232 Teach Pendant, Operator Pendant, Machine Vision robustní průmyslové provedení vlastní programovací jazyk SPEL+ 44/77
45 ídicí jednotka RC1Ř0 úkoly ídicí jednotky: zpracovávání programu v jazyce SPEL+ transformace mezi sou adnými systémy World Joint Pulse inverzní kinematická úloha hlídání mezí pohybu bezpečnost a detekce kolizí ramene ešení dynamiky pohybu v závislosti na hmotnosti b emene 45/77
46 Programování manipulátoru velmi podobné programování i u jiných výrobců režimy programování: p ímé programování (p ímé učení) obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím tlačítka ukládá (Teach Pendant) nep ímé programování (offline) program je offline napsán v prog. jazyce (SPEL+) p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů nebo z nad azených systémů 46/77
 nep ímé programování (offline) program je offline napsán v prog.")
47 Programování manipulátoru velmi podobné programování i u jiných výrobců režimy programování: p ímé programování (p ímé učení) obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím tlačítka ukládá (Teach Pendant) nep ímé programování (offline) program je offline napsán v prog. jazyce (SPEL+) p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů nebo z nad azených systémů 47/77
48 Programování manipulátoru velmi podobné programování i u jiných výrobců režimy programování: p ímé programování (p ímé učení) obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím tlačítka ukládá (Teach Pendant) nep ímé programování (offline) program je offline napsán v prog. jazyce (SPEL+) p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů nebo z nad azených systémů 48/77
 obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím")
 p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů")
49 Programování manipulátoru velmi podobné programování i u jiných výrobců režimy programování: p ímé programování (p ímé učení) obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím tlačítka ukládá (Teach Pendant) nep ímé programování (offline) program je offline napsán v prog. jazyce (SPEL+) p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů nebo z nad azených systémů 49/77
50 Programování manipulátoru velmi podobné programování i u jiných výrobců režimy programování: p ímé programování (p ímé učení) obsluha vede rameno požadovanou trajektorií a požadovanou rychlostí obsluha navádí robota do pozic, které stisknutím tlačítka ukládá (Teach Pendant) nep ímé programování (offline) program je offline napsán v prog. jazyce (SPEL+) p ímé plánování (online) inverzní kinematická úloha ešena v reálném čase dle informací z externích snímačů nebo z nad azených systémů 50/77
![P íkazy jazyka SPEL+ p íkaz XY definice bodu pomocí 4 nebo 6 os Syntax: XY(x, y, z, u, [v, w]) zadání bodu pomocí posunů X, Y,](/docs-images/91/105340479/images/51-0.jpg "Z a úhlů natočení U, V, W U rotace podle osy Z V rotace podle osy Y W rotace podle osy X P10 = XY(60, 30, -50, 45) + P20 51/77")
51 P íkazy jazyka SPEL+ p íkaz XY definice bodu pomocí 4 nebo 6 os Syntax: XY(x, y, z, u, [v, w]) zadání bodu pomocí posunů X, Y, Z a úhlů natočení U, V, W U rotace podle osy Z V rotace podle osy Y W rotace podle osy X P10 = XY(60, 30, -50, 45) + P20 51/77
52 P íkazy jazyka SPEL+ p íkaz GO posun na danou pozici optimalizováno ídicí jednotkou všechny osy se rozjedou a zastaví ve stejný čas trajektorie mezi body může být divoká p íkaz MOVE lienární interpolace mezi body robot se do bodu p esune po p ímce někdy nemusí mít ešení 52/77
53 P íkazy jazyka SPEL+ p íkaz ARC oblouková interpolace Go P100 Arc P101, P102 p íkaz JUMP pohyb pro p esun objektů 3D gate motion 53/77
54 P íkazy jazyka SPEL+ PTP vs. CP každý p íkaz může být definován s modifikátorem CP, který definuje brzdění v bodě 54/77
55 P íkazy jazyka SPEL+ další p íkazy jazyka proměnné (bool, byte, double, global, integer, long, real, string) funkce cykly (for, do) podmínky větvení (select case) wait matematické výpočty (goniom. fce, sqr,...)... a mnoho dalších 55/77
56 Obsah p ednášky 1. Historie průmyslové robotiky letmý pohled do historie stacionárních robotů 2. Základní parametry průmyslových robotů které je nutné brát v úvahu p i výběru vhodného modelu 3. Využití stacionárních robotů v praxi p ehled nejčastějších robotických aplikací nejen v průmyslu 4. Programování manipulátoru Epson C3 p edstavení šestiosého manipulátoru z laborato e robotiky a ukázka programování jeho činnosti 5. Projekty ešené v rámci skupiny robotiky p edstavení projektů ešených na robotu Epson C3 v rámci výzkumu či studentských prací 56/77


57 Robotický 3D skener laserový skener skenovaný objekt robotický manipulátor výsledný 3D model výzkumný projekt 57/77



58 Robotický 3D skener za ízení pro optické snímání povrchu těla neklade žádné speciální nároky na pacienta výstupem je 3D počítačový model 58/77
59 Parametry za ízení precizní komponenty: rozlišení výstupního obrazu desetiny až setiny milimetru robotické rameno: libovolná snímací trajektorie = zachycení detailů složitého povrchu výměnné skenery: vysoká flexibilita užití = jednoduše p izpůsobitelné konkrétní aplikaci optický princip: šetrný k pacientům, žádné p ípravy pro snímání, žádné požadavky na pacienta i obsluhu 59/77
60 Princip robotického 3D skeneru Mě ení vzdálenosti pomocí laserového ádkového snímače Pohyb se skenerem po p edem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změ ené vzdálenosti Stínovaný model povrchu snímaného objektu 60/77
61 Princip robotického 3D skeneru Mě ení vzdálenosti pomocí laserového ádkového snímače Pohyb se skenerem po p edem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změ ené vzdálenosti Stínovaný model povrchu snímaného objektu 61/77


62 Mě ení vzdálenosti Laserový skener scancontrol 2750 mě icí rozsah: mm délkové rozlišení: μm úhlové rozlišení: 0,01ř snímací frekvence: až 2 khz hmotnost: 800g výstupem je sekvence vzdálenostních profilů: 62/77
63 Princip robotického 3D skeneru Mě ení vzdálenosti pomocí laserového ádkového snímače Pohyb se skenerem po p edem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změ ené vzdálenosti Stínovaný model povrchu snímaného objektu 63/77

64 Pohyb se skenerem Schéma hlavního mechanismu: 64/77
65 Princip robotického 3D skeneru Mě ení vzdálenosti pomocí laserového ádkového snímače Pohyb se skenerem po p edem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změ ené vzdálenosti Stínovaný model povrchu snímaného objektu 65/77

66 Výpočet polohy bodu Poloha je vypočtena postupným užitím několika homogenních transformací Transformace z nativních sou adnic robota a skeneru do výchozích sou adnic 66/77
67 Homogenní transformace 0 = výchozí sou adný systém M... manipulátor E... koncový bod manipulátoru S... laserový skener L... laserový dálkoměr 67/77

68 Ukázka získaného mraku bodů 68/77

69 Princip robotického 3D skeneru Mě ení vzdálenosti pomocí laserového ádkového snímače Pohyb se skenerem po p edem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změ ené vzdálenosti Stínovaný model povrchu snímaného objektu 69/77


70 Stínované modely povrchu hledání trojúhelníků v mraku bodů pomocí Delaunayovy triangulace nebo pomocí postupného spojování zobrazení dat aplikace s užitím frameworku XNA 70/77


71 Ukázka výsledného modelu 71/77


72 Robotická dáma diplomová práce 72/77

73 Koncový úchop projekt BROB 73/77

74 Vizualizace v Matlabu projekt BROB 74/77




75 Demonstrační úlohy projekt BROB projekt MRBT 75/77
76 Aktuální projekty Automatické testování displejů (BP) Ovládání robotického ramene pomocí 3D myši (projekt BROB) P ipravované projekty: Ovládací p ípravek pro p ímé učení robotu Ově ení p esnosti a opakovatelnosti pozicování... 76/77

77 Děkuji za pozornost Ing. Adam Chromý Technická Brno místnost SE1.112 «
Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii. Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D.
 Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D. Projekt 3D skeneru laserový skener robotický manipulátor skenovaný objekt 2/12 Robotický
Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D. Projekt 3D skeneru laserový skener robotický manipulátor skenovaný objekt 2/12 Robotický
Aplikace robotiky v biomedicíně. Ing. Adam Chromý
 Ing. Adam Chromý Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti
Ing. Adam Chromý Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
M3A ROB: 7. Konstrukce robotů
 ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD
 PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
ROBOTIKA HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY. (Stacionární roboty) Prof. František Šolc
 Prof. František Šolc") HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2014 8 14/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
Vybrané partie z robotiky
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Vybrané partie z robotiky Autoři textu: Ing. Aleš Jelínek Ing. Adam Chromý Brno 2015 Komplexní inovace studijních programů
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Vybrané partie z robotiky Autoři textu: Ing. Aleš Jelínek Ing. Adam Chromý Brno 2015 Komplexní inovace studijních programů
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
LAKOVACÍ ROBOTY - CMA GR650ST
 LAKOVACÍ ROBOTY - CMA GR650ST Antropomorfní robot model GR-650 je elektronicky řízený stroj se 6 osami, který je určen k automatickému lakování práškovými barvami pro povrchovou úpravu dřevěných, kovových
LAKOVACÍ ROBOTY - CMA GR650ST Antropomorfní robot model GR-650 je elektronicky řízený stroj se 6 osami, který je určen k automatickému lakování práškovými barvami pro povrchovou úpravu dřevěných, kovových
24. Úvod do robotiky. 24.1. Vlastnosti robotů. 24.2. Oblasti použití průmyslových robotů. 24.3. Rozdělení průmyslových robotů. Definice: Robotika
 oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje
 Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje K vykonávání automatických cyklů na stroji nemůsí být nutné instalovat komplexní a tudíž drahý CNC systém. Někdy je možno dosáhnout
Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje K vykonávání automatických cyklů na stroji nemůsí být nutné instalovat komplexní a tudíž drahý CNC systém. Někdy je možno dosáhnout
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Systémy s jedním pohonem
 Všeobecné údaje Systém s jedním pohonem (YXCS) je modul pohonu (EHM ) pro libovolný pohyb v jedné ose. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost a robustní konstrukce
Všeobecné údaje Systém s jedním pohonem (YXCS) je modul pohonu (EHM ) pro libovolný pohyb v jedné ose. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost a robustní konstrukce
Naše malé systémy pro velká zadání. Technické specifikace
 Měření kontur odklon od tradičních způsobů: Spojení měřicích os X a Z je možné jen do jistých mezí. Naše řešení: oddělení os X a Z. Osa X provádí posuv měřeného prvku, zatímco osa Z zajišt uje kontakt
Měření kontur odklon od tradičních způsobů: Spojení měřicích os X a Z je možné jen do jistých mezí. Naše řešení: oddělení os X a Z. Osa X provádí posuv měřeného prvku, zatímco osa Z zajišt uje kontakt
MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.
![MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.](/thumbs/91/105892726.jpg "MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.") MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
3D sou adnicový m icí stroj. Od vodn ní vymezení technických podmínek podle 156 odst. 1 písm. c) zákona. 137/2006 Sb.
 zákona. 137/2006 Sb.") Název ve ejné zakázky: 3D sou adnicový m icí stroj Od vodn ní vymezení technických podmínek podle 156 odst. 1 písm. c) zákona. 137/2006 Sb. Technická podmínka: Od vodn ní Je požadován 3D sou adnicový m
Název ve ejné zakázky: 3D sou adnicový m icí stroj Od vodn ní vymezení technických podmínek podle 156 odst. 1 písm. c) zákona. 137/2006 Sb. Technická podmínka: Od vodn ní Je požadován 3D sou adnicový m
24. Úvod do robotiky Vlastnosti robotů Oblasti použití průmyslových robotů Rozdělení průmyslových robotů. Definice: Robotika
 zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Pokročilé robotické technologie pro průmyslové aplikace
 Vize v automatizaci - Digitální továrna 4. října 2011 Výstaviště Brno Pokročilé robotické technologie pro průmyslové aplikace Aleš Pochylý, Tomáš Kubela, Vladislav Singule, Lukáš Flekal 1/18 Pokročilé
Vize v automatizaci - Digitální továrna 4. října 2011 Výstaviště Brno Pokročilé robotické technologie pro průmyslové aplikace Aleš Pochylý, Tomáš Kubela, Vladislav Singule, Lukáš Flekal 1/18 Pokročilé
Řídící systémy hydraulických procesů. Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu.
 Řídící systémy hydraulických procesů Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu. Hydraulický systém Vysoký výkon a síla při malých rozměrech Robustní a levné lineární pohony Regulace
Řídící systémy hydraulických procesů Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu. Hydraulický systém Vysoký výkon a síla při malých rozměrech Robustní a levné lineární pohony Regulace
Procesní automatizační systém PC 8000. Stručné informace
 Procesní automatizační systém Stručné Strana 2 PC systém se skládá z několika modulů Ovládací jednotka průmyslového počítače Více kontrolních jednotek (momentálně vždy 1x PAS a FEED) Síťová část a nepřetržité
Procesní automatizační systém Stručné Strana 2 PC systém se skládá z několika modulů Ovládací jednotka průmyslového počítače Více kontrolních jednotek (momentálně vždy 1x PAS a FEED) Síťová část a nepřetržité
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
Základní uvedení do provozu frekvenčního měniče SD6/SI6 od firmy Stöber
 Základní uvedení do provozu frekvenčního měniče SD6/SI6 od firmy Stöber 2 Základní uvedení do provozu frekvenčního měniče SD6/SI6 od firmy Stöber s ovládáním přes I/O Abstrakt Tento aplikační postup popisuje
Základní uvedení do provozu frekvenčního měniče SD6/SI6 od firmy Stöber 2 Základní uvedení do provozu frekvenčního měniče SD6/SI6 od firmy Stöber s ovládáním přes I/O Abstrakt Tento aplikační postup popisuje
Moderní trendy měření Radomil Sikora
 Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Úvod do průmyslové robotiky. Aleš Pochylý. Co je to robot? Robotizované pracoviště. Znalosti v robotice. Robotický systém
 Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019
 VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
Automatizační a měřicí technika (B-AMT)
") Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
GEN230-3i3u-X-ADE. Specifikace kalibra ního generátoru
 Ing. Z.Královský Ing. Petr Štol Perk 457 Okrajová 1356 675 22 STA 674 01 T EBÍ vývoj a výroba m ící a ídící techniky Tel.: 568 870982 Tel.: 568 848179 SW pro vizualizaci, m ení a regulaci Fax: 568 870982
Ing. Z.Královský Ing. Petr Štol Perk 457 Okrajová 1356 675 22 STA 674 01 T EBÍ vývoj a výroba m ící a ídící techniky Tel.: 568 870982 Tel.: 568 848179 SW pro vizualizaci, m ení a regulaci Fax: 568 870982
Nejenom výcvik, skutečná akce! Reálný výcvik s průmyslovým výkonemt
 [ To je ] E[M]CONOMy: Nejenom výcvik, skutečná akce! Concept turn 250 Reálný výcvik s průmyslovým výkonemt Concept TURN 250 Nekompromisní kvalita do posledního šroubku, a to za nepřekonatelnou cenu. Stroj
[ To je ] E[M]CONOMy: Nejenom výcvik, skutečná akce! Concept turn 250 Reálný výcvik s průmyslovým výkonemt Concept TURN 250 Nekompromisní kvalita do posledního šroubku, a to za nepřekonatelnou cenu. Stroj
Semestrální práce z p edm tu URM (zadání), 2014/2015:
, 2014/2015:") Semestrální práce z p edm tu URM (zadání), 2014/2015: 1. Vyzna te na globusu cestu z jihu Grónska na jih Afriky, viz Obrázek 1. V po áte ní a cílové destinaci bude zapíchnutý ²pendlík sm ující do st edu
Semestrální práce z p edm tu URM (zadání), 2014/2015: 1. Vyzna te na globusu cestu z jihu Grónska na jih Afriky, viz Obrázek 1. V po áte ní a cílové destinaci bude zapíchnutý ²pendlík sm ující do st edu
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
Bezdrátový přenos signálu v reálné aplikaci na letadle.
 Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Ústav automatizace a měřicí techniky.
 www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
Příloha č. 2 Technická specifikace
 Příloha č. 2 Technická specifikace Název veřejné zakázky: MoVI-FAI Malé robotické pracoviště IDENTIFIKAČNÍ ÚDAJE ZADAVATELE Obchodní název: Sídlo Univerzita Tomáše Bati ve Zlíně nám. T. G. Masaryka 5555,
Příloha č. 2 Technická specifikace Název veřejné zakázky: MoVI-FAI Malé robotické pracoviště IDENTIFIKAČNÍ ÚDAJE ZADAVATELE Obchodní název: Sídlo Univerzita Tomáše Bati ve Zlíně nám. T. G. Masaryka 5555,
Robustní provedení Robustní vodicí sloupec i měřicí hlava Vysoce přesný měřicí systém s kontrolní měřicí hlavou, systém není citlivý na nečistoty
 - 2-16 Nový výškoměr Chcete-li dosáhnout přesných výsledků jednoduše a rychleji, je zde nový výškoměr. Výškoměr je použitelný v dílně i ve výrobě. Přesně jak to od našich měřidel očekáváte. Uživatelsky
- 2-16 Nový výškoměr Chcete-li dosáhnout přesných výsledků jednoduše a rychleji, je zde nový výškoměr. Výškoměr je použitelný v dílně i ve výrobě. Přesně jak to od našich měřidel očekáváte. Uživatelsky
Kalibrace ROBOTU OBSAH
 Kalibrace ROBOTU OBSAH Nulová poloha SCARA robotu Kontrola přesnosti najíždění Pojmy kalibrace Kalibrace podle kalibračního wizardu Přesná kalibrace bez kalibračního wizardu Kalibrační bod Rekapitulace
Kalibrace ROBOTU OBSAH Nulová poloha SCARA robotu Kontrola přesnosti najíždění Pojmy kalibrace Kalibrace podle kalibračního wizardu Přesná kalibrace bez kalibračního wizardu Kalibrační bod Rekapitulace
Inovace robotu BCN3D MOVEO
 Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
-V- novinka. Jednotky motoru MTR-DCI 2.2. motor s integrovaným ovladačem, převodovkou a řízením. kompaktní konstrukce
 Jednotky motoru MTR-DCI motor s integrovaným ovladačem, převodovkou a řízením kompaktní konstrukce ovládání prostřednictvím vstupů/výstupů stupeň krytí IP54 2006/10 změny vyhrazeny výrobky 2007 5/-1 hlavní
Jednotky motoru MTR-DCI motor s integrovaným ovladačem, převodovkou a řízením kompaktní konstrukce ovládání prostřednictvím vstupů/výstupů stupeň krytí IP54 2006/10 změny vyhrazeny výrobky 2007 5/-1 hlavní
Optoelektronické. BGL Vidlicové optické závory. snímače
 Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
KEYBPTZ3DL8VGA. uživatelský manuál
 KEYBPTZ3DL8VGA uživatelský manuál Obecné informace Klávesnice je univerzálním ovládacím prvkem pro PTZ kamery a zobrazovací matice, řízení se provádí ve spojení sběrnicí RS-485, je podporována většina
KEYBPTZ3DL8VGA uživatelský manuál Obecné informace Klávesnice je univerzálním ovládacím prvkem pro PTZ kamery a zobrazovací matice, řízení se provádí ve spojení sběrnicí RS-485, je podporována většina
MSA PLUS Elektrosvařovací jednotky
 Elektrosvařovací jednotky Nová generace jednotek Nová rukojeť Ochrana kabelů proti poškození Grafický displej Dobře čitelný, s nastavitelným kontrastem Jednoduchá klávesnice pro snadné ovládání v uživatelském
Elektrosvařovací jednotky Nová generace jednotek Nová rukojeť Ochrana kabelů proti poškození Grafický displej Dobře čitelný, s nastavitelným kontrastem Jednoduchá klávesnice pro snadné ovládání v uživatelském
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II
 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
On-line datový list. V3S153-2AAAAABP01 Visionary-B 3D VISION
 On-line datový list V3S153-2AAAAABP01 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
On-line datový list V3S153-2AAAAABP01 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
Aplikace bin picking s použitím senzorové fúze
 Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
MSA PLUS Elektrosvařovací jednotky
 Elektrosvařovací jednotky Nová generace jednotek Nová rukojeť Ochrana kabelů proti poškození Grafický displej Dobře čitelný, s nastavitelným kontrastem Jednoduchá klávesnice pro snadné ovládání v uživatelském
Elektrosvařovací jednotky Nová generace jednotek Nová rukojeť Ochrana kabelů proti poškození Grafický displej Dobře čitelný, s nastavitelným kontrastem Jednoduchá klávesnice pro snadné ovládání v uživatelském
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití
 KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití Typ První z nové generace SCARA S bezkonkurenčním časem cyklu 0,29 sekundy je THP550 SCARA první z nové řady robotů
KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití Typ První z nové generace SCARA S bezkonkurenčním časem cyklu 0,29 sekundy je THP550 SCARA první z nové řady robotů
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč
 PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
VÁLCOVACÍ TRATĚ. Charakteristika. pro tvarování a stříhání lamel C, S, Z (TPL v6)
") ISOTRA TECHNOLOGY VÁLCOVACÍ TRATĚ pro tvarování a stříhání lamel C, S, Z (TPL v6) Válcovací tratě TPL jsou určeny pro profilování a stříhání lamel C, S, Z a lamel řetězové žaluzie. Základním zpracovávaným
ISOTRA TECHNOLOGY VÁLCOVACÍ TRATĚ pro tvarování a stříhání lamel C, S, Z (TPL v6) Válcovací tratě TPL jsou určeny pro profilování a stříhání lamel C, S, Z a lamel řetězové žaluzie. Základním zpracovávaným
Výukový materiál KA č.4 Spolupráce se ZŠ
 Výukový materiál KA č.4 Spolupráce se ZŠ Modul: Automatizace Téma workshopu: Řízení pneumatických (hydraulických) systémů programovatelnými automaty doplněk k workshopu 1 Vypracoval: Ing. Michal Burger
Výukový materiál KA č.4 Spolupráce se ZŠ Modul: Automatizace Téma workshopu: Řízení pneumatických (hydraulických) systémů programovatelnými automaty doplněk k workshopu 1 Vypracoval: Ing. Michal Burger
o 2ks p ímých spojek (mezi moduly F-G), délka maximáln 60mm o 2ks p ímých spojek (mezi moduly D-F, E-G), délka 70 120mm
, délka maximáln 60mm o 2ks p ímých spojek (mezi moduly D-F, E-G), délka 70 120mm") Název veejné zakázky: Konstrukní prvky modulárních robot v. lineárních a rotaních pohon Odvodnní vymezení technických podmínek podle 156 odst. 1 písm. c) zákona. 137/2006 Sb. Technická podmínka: Odvodnní
Název veejné zakázky: Konstrukní prvky modulárních robot v. lineárních a rotaních pohon Odvodnní vymezení technických podmínek podle 156 odst. 1 písm. c) zákona. 137/2006 Sb. Technická podmínka: Odvodnní
On-line datový list. V3S153-2BAAAAAP02 Visionary-B 3D VISION
 On-line datový list V3S153-2BAAAAAP02 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
On-line datový list V3S153-2BAAAAAP02 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
Prostorové portály technické údaje
 Všeobecné údaje Prostorový portál (YXCR) se skládá z více pohonných modulů (EHM / DHMZ) k zajištění pohybu v prostoru (3D). lze univerzálně používat pro lehké až velmi těžké díly a také pro velké užitečné
Všeobecné údaje Prostorový portál (YXCR) se skládá z více pohonných modulů (EHM / DHMZ) k zajištění pohybu v prostoru (3D). lze univerzálně používat pro lehké až velmi těžké díly a také pro velké užitečné
Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]
![Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]](/thumbs/27/11375045.jpg "Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]") Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY] 1 ÚVOD Úloha 38 popisuje jednu část oblasti sestava programu Solid Edge V20. Tato úloha je v první části zaměřena
Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY] 1 ÚVOD Úloha 38 popisuje jednu část oblasti sestava programu Solid Edge V20. Tato úloha je v první části zaměřena
Vysokorychlostní 7000 Hz vzorkovací frekvence přesně vystihuje špičkové hodnoty točivého momentu.
 Katalogový list www.abetec.cz Zkušební přístroj momentových nástrojů MTT02-50E Obj. číslo: 106001893 Výrobce: Mark-10 Corporation Popis Kapacita přístroje 570,0 Ncm (50,0 lbin). Rozlišení 0,5 Ncm (0,02
Katalogový list www.abetec.cz Zkušební přístroj momentových nástrojů MTT02-50E Obj. číslo: 106001893 Výrobce: Mark-10 Corporation Popis Kapacita přístroje 570,0 Ncm (50,0 lbin). Rozlišení 0,5 Ncm (0,02
METODICKÝ LIST 1. Název výukové aktivity (tématu): 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:
: 2. Jméno autora: Ing. Petr Hořejší, Ph.D., Ing. Jana Hořejší 3. Anotace:") METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro třídění barevných LEGO kostek (představujících různé druhy produktů ve výrobě) 2. Jméno autora: Ing. Petr Hořejší,
ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY
 ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY Nadlimitní zakázka zadaná v otevřeném řízení dle 56 zákona č. 134/2016 Sb., o zadávání veřejných zakázek, ve znění pozdějších předpisů Předmět veřejné zakázky Extrakorporální
ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY Nadlimitní zakázka zadaná v otevřeném řízení dle 56 zákona č. 134/2016 Sb., o zadávání veřejných zakázek, ve znění pozdějších předpisů Předmět veřejné zakázky Extrakorporální
Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA
 Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA 1. Technická specifikace Možnost napájení ze sítě nebo akumulátoru s UPS funkcí - alespoň 2 hodiny provozu z akumulátorů
Příloha č. 3 TECHNICKÉ PARAMETRY PRO DODÁVKU TECHNOLOGIE: UNIVERZÁLNÍ MĚŘICÍ ÚSTŘEDNA 1. Technická specifikace Možnost napájení ze sítě nebo akumulátoru s UPS funkcí - alespoň 2 hodiny provozu z akumulátorů
Osy s lineárním motorem řady HN a HG
 HN HG Osy s lineárním motorem řady HN a HG Nekompromisní a vysoce dynamická lineární osa HN s pevnou základnou-integrována a připravena k použití. Kompaktní a precizní vedení, i absolutní měřící systém
HN HG Osy s lineárním motorem řady HN a HG Nekompromisní a vysoce dynamická lineární osa HN s pevnou základnou-integrována a připravena k použití. Kompaktní a precizní vedení, i absolutní měřící systém
On-line datový list. V3S153-2BAAAABP02 Visionary-B 3D VISION
 On-line datový list V3S153-2BAAAABP02 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
On-line datový list V3S153-2BAAAABP02 Visionary-B A B C D E F H I J K L M N O P Q R S T Obrázek je pouze ilustrační Technická data v detailu Vlastnosti Stanovení úlohy Technologie Kategorie produktů Pracovní
Přímočaré portály technické údaje
 Všeobecné údaje Přímočarý portál (YXCR) se skládá z více pohonných modulů (EHM / DHMZ) k zajištění pohybu v rovině 2D. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost
Všeobecné údaje Přímočarý portál (YXCR) se skládá z více pohonných modulů (EHM / DHMZ) k zajištění pohybu v rovině 2D. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Středoškolská technika SCI-Lab
 Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
Středoškolská technika 2016 Setkání a prezentace prací středoškolských studentů na ČVUT SCI-Lab Kamil Mudruňka Gymnázium Dašická 1083 Dašická 1083, Pardubice O projektu SCI-Lab je program napsaný v jazyce
2000 bodová datová paměť se statistikami, výstupem a uložením datumu a času (volitelně).
.") dodavatel vybavení provozoven firem www.abetec.cz Testovací zařízení tahu vodičů WT3-201ME Obj. číslo: 106001934 Výrobce: Mark-10 Corporation Popis Motorizované testovací zařízení určené ke zjišťování
dodavatel vybavení provozoven firem www.abetec.cz Testovací zařízení tahu vodičů WT3-201ME Obj. číslo: 106001934 Výrobce: Mark-10 Corporation Popis Motorizované testovací zařízení určené ke zjišťování
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Autonomní dopravní prostředek Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Autonomní dopravní prostředek Anotace: Úkolem
ELEKTRONICKÉ ZOBRAZOVACÍ SYSTÉMY
 ZOBRAZOVACÍ SLOUPEC S MIKROPROCESOREM Zobrazovací sloupec s mikroprocesorem je určen k zobrazení rozměrového i tvarového měření prováděného staticky či dynamicky. Naměřená hodnota se zobrazuje na osmimístném
ZOBRAZOVACÍ SLOUPEC S MIKROPROCESOREM Zobrazovací sloupec s mikroprocesorem je určen k zobrazení rozměrového i tvarového měření prováděného staticky či dynamicky. Naměřená hodnota se zobrazuje na osmimístném
CALL ME COWELDER KOLABORATIVNÍ SVAŘOVACÍ ROBOT VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE P R O G R A M O V Á N Í
 CALL ME COWELDER KOLABORATIVNÍ SVAŘOVACÍ ROBOT MAXIMÁLNÍ FLEXIBILITA S N A D N É P R O G R A M O V Á N Í... VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE... 03 02 01... 03 02 01 OBSAH Co je to kolaborativní
CALL ME COWELDER KOLABORATIVNÍ SVAŘOVACÍ ROBOT MAXIMÁLNÍ FLEXIBILITA S N A D N É P R O G R A M O V Á N Í... VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE... 03 02 01... 03 02 01 OBSAH Co je to kolaborativní
Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Osa s lineárním motorem řady HN
 Osa s lineárním motorem řady HN Nekompromisní a vysoce dynamická lineární osa s pevnou základnou-integrována a připravena k použití. Kompaktní a precizní vedení, i absolutní měřící systém - to vše patří
Osa s lineárním motorem řady HN Nekompromisní a vysoce dynamická lineární osa s pevnou základnou-integrována a připravena k použití. Kompaktní a precizní vedení, i absolutní měřící systém - to vše patří
Robotika průmyslové roboty. Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002
 Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
26. Konstrukce robotů Schéma konstrukce robotu
 zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ
 OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ Odlišnosti silových a ovládacích obvodů Logické funkce ovládacích obvodů Přístrojová realizace logických funkcí Programátory pro řízení procesů Akční členy ovládacích
OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ Odlišnosti silových a ovládacích obvodů Logické funkce ovládacích obvodů Přístrojová realizace logických funkcí Programátory pro řízení procesů Akční členy ovládacích
V586. Připraveni na změnu? Nejspolehlivější řešení
 Připraveni na změnu? Nejspolehlivější řešení PÉČE O HYGIENU MASIVNÍ PROVEDENÍ VYNIKAJÍCÍ ERGONOMICKÉ ŘEŠENÍ POKROČILÝ INTEGROVANÝ SYSTÉM PLNĚ OVLADATELNÁ JEDNOTKA MASIVNÍ PROVEDENÍ Stabilita Souprava je
Připraveni na změnu? Nejspolehlivější řešení PÉČE O HYGIENU MASIVNÍ PROVEDENÍ VYNIKAJÍCÍ ERGONOMICKÉ ŘEŠENÍ POKROČILÝ INTEGROVANÝ SYSTÉM PLNĚ OVLADATELNÁ JEDNOTKA MASIVNÍ PROVEDENÍ Stabilita Souprava je
Systémy pro měření, diagnostiku a testování prototypů II. Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) ZVZ
 ZVZ") Název veřejné zakázky: Systémy pro měření, diagnostiku a testování prototypů II. Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) ZVZ Technická podmínka: Odůvodnění Zaškolení obsluhy:
Název veřejné zakázky: Systémy pro měření, diagnostiku a testování prototypů II. Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) ZVZ Technická podmínka: Odůvodnění Zaškolení obsluhy:
Logické řízení s logickým modulem LOGO!
 Logické řízení s logickým modulem LOGO! Cíl: Seznámit se s programováním jednoduchého programovatelného automatu (logického modulu) LOGO! a vyzkoušet jeho funkčnost na konkrétních zapojeních. Úkol: 1)
Logické řízení s logickým modulem LOGO! Cíl: Seznámit se s programováním jednoduchého programovatelného automatu (logického modulu) LOGO! a vyzkoušet jeho funkčnost na konkrétních zapojeních. Úkol: 1)
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ TRENDY EVROPSKÉHO STAVEBNICTVÍ
 ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme
 Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
IRB 1660ID Vysoce výkonný robot ID pro obloukové svařování a obsluhu strojů
 Per Loewgren, globální manažer pro výrobky pro oblast středně velkých robotů, obloukové svařování, řezání a nepřetržité laserové svařování IRB 1660ID Vysoce výkonný robot ID pro obloukové svařování a obsluhu
Per Loewgren, globální manažer pro výrobky pro oblast středně velkých robotů, obloukové svařování, řezání a nepřetržité laserové svařování IRB 1660ID Vysoce výkonný robot ID pro obloukové svařování a obsluhu
Dílčí projekt: Systém projektování textilních struktur 1.etapa: tvorba systému projektování vlákno - příze - tkanina
 Program LibTex Uživatelská příručka 1 Obsah Program Textilní Design... 1 Uživatelská příručka... 1 1 Obsah... 2 2 Rejstřík obrázků... 2 3 Technické požadavky... 3 3.1 Hardware... 3 3.1.1 Procesor... 3
Program LibTex Uživatelská příručka 1 Obsah Program Textilní Design... 1 Uživatelská příručka... 1 1 Obsah... 2 2 Rejstřík obrázků... 2 3 Technické požadavky... 3 3.1 Hardware... 3 3.1.1 Procesor... 3
Servozesilovače. Digitální servozesilovače TGA, TGP
 Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
26. Konstrukce robotů
 oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
České vysoké učení technické v Praze Fakulta elektrotechnická. Katedra měření. Dokumentace. Rotační enkodér
 České vysoké učení technické v Praze Fakulta elektrotechnická Katedra měření Dokumentace Rotační enkodér Zpracovali Jan Paštyka a Ondřej Hruška 30. dubna 2017 1 Základní informace Rotační enkodér slouží
České vysoké učení technické v Praze Fakulta elektrotechnická Katedra měření Dokumentace Rotační enkodér Zpracovali Jan Paštyka a Ondřej Hruška 30. dubna 2017 1 Základní informace Rotační enkodér slouží
SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV.
 SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV Ondřej Bublík ABSTRAKT Tato práce se zabývá návrhem, simulací a konstrukčním
SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV Ondřej Bublík ABSTRAKT Tato práce se zabývá návrhem, simulací a konstrukčním
Ovládací prvky DGT 61 SAPE 69 CHIS 37 CHIS-E 37 DOPLŇKOVÉ PŘÍSLUŠENSTVÍ PRO DGT 61 / SAPE 69 / CHIS 37 / CHIS-E FADINI. str.
 Ovládací prvky CZ Ovládací prvky DGT 61 Digitální kódovací klávesnice str. 118 SAPE 69 Snímač karet nebo magnetických klíčů str. 119 CHIS 37 Klíčový spínač str. 120 CHIS-E 37 Klíčový spínač str. 121 DOPLŇKOVÉ
Ovládací prvky CZ Ovládací prvky DGT 61 Digitální kódovací klávesnice str. 118 SAPE 69 Snímač karet nebo magnetických klíčů str. 119 CHIS 37 Klíčový spínač str. 120 CHIS-E 37 Klíčový spínač str. 121 DOPLŇKOVÉ
REQ /A CNC vertikální frézovací centrum musí splňovat následující parametry definované v tabulce č. 1.
 Institute of Physics ASCR, v. v. i. Na Slovance 2 182 21 Prague 8 eli-cz@fzu.cz www.eli-beams.eu 1. CNC vertikální frézovací centrum REQ-010195/A CNC vertikální frézovací centrum musí splňovat následující
Institute of Physics ASCR, v. v. i. Na Slovance 2 182 21 Prague 8 eli-cz@fzu.cz www.eli-beams.eu 1. CNC vertikální frézovací centrum REQ-010195/A CNC vertikální frézovací centrum musí splňovat následující
VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE CHYTRÉ ŘEŠENÍ S MINIMÁLNÍMI ROZMĚRY CALL ME COWELDER 1 KOLABORATIVNÍ SVAŘOVACÍ ROBOT
 VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE...... CHYTRÉ ŘEŠENÍ S MINIMÁLNÍMI ROZMĚRY CALL ME COWELDER 1 KOLABORATIVNÍ SVAŘOVACÍ ROBOT OBSAH Nový svařovací asistent 3 Technická data svařovacích strojů 4
VESTAVĚNÝ BEZPEČNOSTNÍ SYSTÉM OZNAČENÍ CE...... CHYTRÉ ŘEŠENÍ S MINIMÁLNÍMI ROZMĚRY CALL ME COWELDER 1 KOLABORATIVNÍ SVAŘOVACÍ ROBOT OBSAH Nový svařovací asistent 3 Technická data svařovacích strojů 4
SICK ROBOTICKÉ APLIKACE
 SICK ROBOTICKÉ APLIKACE Martin Oswald Září 2017 Výroba má být co nejjednodušší a výrobek prakticky nejlepší. Všechno udělají živé stroje - člověk bude dělat, jen to co miluje. Bude žít proto, aby se zdokonaloval.
SICK ROBOTICKÉ APLIKACE Martin Oswald Září 2017 Výroba má být co nejjednodušší a výrobek prakticky nejlepší. Všechno udělají živé stroje - člověk bude dělat, jen to co miluje. Bude žít proto, aby se zdokonaloval.