Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II
|
|
|
- Bohumila Bednářová
- před 6 lety
- Počet zobrazení:
Transkript
1 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II

 - pomoc robotů ve výrobních závodech všeho druhu -")
2 POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší - svět fantastiky a sci-fi (knihy, filmy, hry apod.) - pomoc robotů ve výrobních závodech všeho druhu - domácí a ostatní roboti

3 AUTOMAT - AUTOMATIZACE AUTOMATY - zařízení, stroje, které automaticky (tedy samočinně) vykonávají určitou operaci, k jejímuž vykonávání byly specificky (jednoúčelově) navrženy a vyrobeny nasazením automatů se podstatně zvýšila produktivita práce a zmenšila se závislost na lidské pracovní síle ve výrobě se zvýšila přesnost, snížila se zmetkovitost AUTOMATIZACE - použití řídicích systémů (např. regulátorů, počítačů, snímačů) k řízení průmyslových zařízení a procesů automatizace snižuje potřebu přítomnosti člověka při vykonávání určité činnosti


4 ROBOTIKA ROBOT - zařízení automaticky reagující na podněty okolí a současně na toto okolí zpětně působící, jinými slovy je schopen vnímat své okolí pomocí senzorů, zasahovat do něj, případně si o něm vytvářet vlastní představu. Cesta k robotům vede přes automaty. Rozvoj robotů nastal až v době, kdy funkci řídící jednotky převzal vhodný počítač. ROBOTIKA - vědní obor za bývající se výzkumem a vývojem robotů Ustálená definice pojmu robot doposud neexistuje.



5 Obecnost a inteligence vyžadovaná u robota je zde využívána hlavně k orientaci v prostředí (např. robotické vysavače či sekačky trávy). Podle definice je robot strojem pracujícím s určitou mírou samostatnosti, vykonávající určené úkoly, a to předepsaným způsobem a při různých mírách potřeby interakce s okolním světem a se zadavatelem.



6 VÝVOJ A ROZVOJ 1. Ulehčení a náhrada člověka v namáhavé práci mechanizace (nahrazení síly člověka silou stroje), poté nastala další etapa 2. Vyloučení namáhavé, stále se opakující a úmorné práce pomocí postupné automatizace (vliv průmyslové revoluce zdroje síly) 3. Rozvoj a prohlubování automatizace nutnost řídící techniky a komunikace

 2. Rozvoj tzv.")

7 VÝVOJ A ROZVOJ 1. Integrování rozsáhlých výrobních linek plné využití výhod automatizace (vliv na změnu struktury zaměstnanosti) 2. Rozvoj tzv. manipulátorů ovládaných člověkem přes technické rozhraní 3. Další rozvoj směrem k robotice silně ovlivněn a podmíněn rozvoj komunikační techniky, počítačů a rozvoje kybernetiky




8 ZVLÁŠTNÍ PŘÍKLADY AUTOMATŮ Člověk je od přírody tvor lenivý


9 Meziplanetární a kosmické sondy a přistávací moduly - důraz na autonomnost, orientaci, plnění úkolů



10



11 ROBOTICKÁ RUKA FIRMY LYNXMOTION manipulátor AL5DC-KT s rotací zápěstí WRU-HD







12 STAVEBNICE ROBOTICKÉ RUKY




13 STAVBA ROBOTICKÉ RUKY Otočná základna - připevněna na pevnou podložku - servo k otáčení celé ruky - připojení řídící desky SSC-32 - držák k přidělání ramene


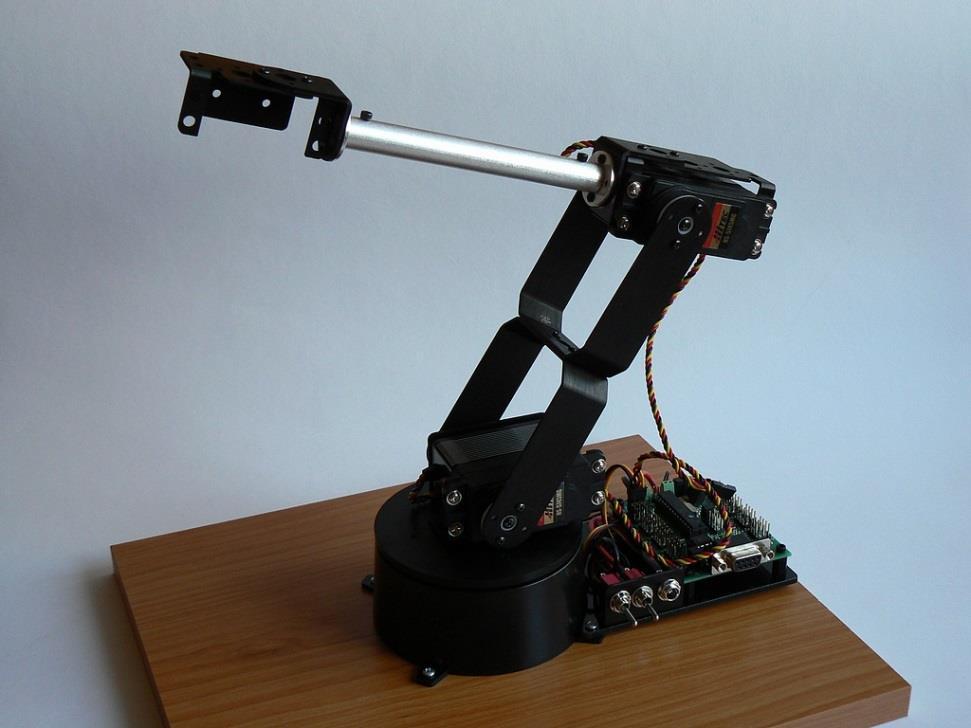

14 STAVBA ROBOTICKÉ RUKY Rameno a loket - připevněné k otočné základně - dvě serva



15 Rotace zápěstí - tři serva - tři stupně volnosti - nahoru dolů - otáčení - uzavírání čelistí STAVBA ROBOTICKÉ RUKY



16 STAVBA ROBOTICKÉ RUKY
17 PROGRAMOVÁNÍ SOFTWARE RIOS nabídka pro celkovou konfiguraci a kalibraci robotické ruky nabídka a nastavení komunikace nabídka pro programování pohybů robotické ruky a spouštění již hotových projektů

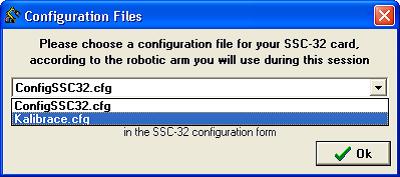
18 KALIBRACE ROBOTICKÉ RUKY

19 OVLÁDÁNÍ ROBOTICKÉ RUKY údaje o jednotlivých kloubech poloha ruky v souřadnicovém systému panel k ovládání robota vytváření projektů
20 OVLÁDÁNÍ ROBOTICKÉ RUKY Přepínání rychlosti Svírání otevírání čelistí Otáčení základny Pohyb ramene Pohyb zápěstí nahoru - dolů Pohyb lokte Záchrana vypnutí všech server Otáčení čelistí
21 VYTVÁŘENÍ PROJEKTŮ o krok zpět nový projekt vložení nové sekvence vložení nového kroku smazání projektu vložení nové sekvence mezi již vytvořené vložení nového kroku mezi již vytvořené přejmenování projektu smazání celé sekvence smazání vybraného kroku přepsání vybraného kroku

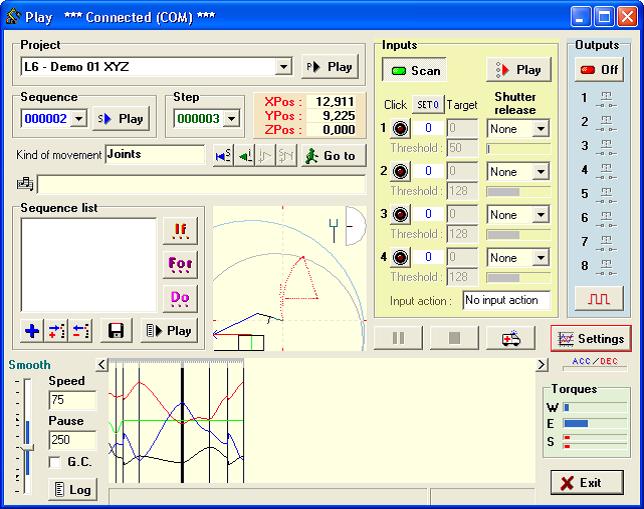
22 PŘEHRÁVÁNÍ PROJEKTŮ



23 PRAKTICKÉ ÚKOLY - Mávání - Otáčení zápěstím - Uchopení a přemístění předmětů - Stavba pyramidy - Uchopení tužky, psaní písmen - Další dle vlastní fantazie
24 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 PRAKTICKÁ ČÁST
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty 1 Úvodem slovo automat je
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty 1 Úvodem slovo automat je
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
VÝROBNÍ STROJE. EduCom. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita v Liberci
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Příklad využití robotického manipulátoru
 Fakulta pedagogická Katedra technické výchovy Příklad využití robotického manipulátoru Jan Čermák Aleš Křivánek Úvod Úkolem této práce bylo ukázat si na jednoduchém příkladu možnosti použití robotického
Fakulta pedagogická Katedra technické výchovy Příklad využití robotického manipulátoru Jan Čermák Aleš Křivánek Úvod Úkolem této práce bylo ukázat si na jednoduchém příkladu možnosti použití robotického
Řídicí systém pro každého
 Akce: Přednáška, KA 5 Téma: ŘÍDICÍ SYSTÉM PRO KAŽDÉHO Lektor: Ing. Balda Pavel, Ph.D. Třída/y: 3ME, 4ME Datum konání: 11. 3. 2014 Místo konání: malá aula Čas: 5. a 6. hodina; od 11:50 do 13:30 Řídicí systém
Akce: Přednáška, KA 5 Téma: ŘÍDICÍ SYSTÉM PRO KAŽDÉHO Lektor: Ing. Balda Pavel, Ph.D. Třída/y: 3ME, 4ME Datum konání: 11. 3. 2014 Místo konání: malá aula Čas: 5. a 6. hodina; od 11:50 do 13:30 Řídicí systém
Průmyslové roboty a manipulátory, průmyslové počítače, PLC, řídicí systémy a operátorské panely
 www.elektroprumysl.cz srpen 2017 ročník 7 Zaměřeno na elektrotechniku, průmyslovou automatizaci a nové technologie Průmyslové roboty a manipulátory, průmyslové počítače, PLC, řídicí systémy a operátorské
www.elektroprumysl.cz srpen 2017 ročník 7 Zaměřeno na elektrotechniku, průmyslovou automatizaci a nové technologie Průmyslové roboty a manipulátory, průmyslové počítače, PLC, řídicí systémy a operátorské
Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015
 Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015 KUKA Roboter GmbH Strana 2 KUKA a Industry 4.0 KUKA je 1898 1956 Společnost KUKA byla založena v Augsburgu jako výrobce acetylénových lamp.
Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015 KUKA Roboter GmbH Strana 2 KUKA a Industry 4.0 KUKA je 1898 1956 Společnost KUKA byla založena v Augsburgu jako výrobce acetylénových lamp.
MRBT. Stacionární průmyslový robot EPSON C3 aplikace pro prezentaci
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ MRBT Stacionární průmyslový robot EPSON C3 aplikace pro prezentaci Autoři: Jaromír Picka ID:115255 Jaroslav Večeřa ID:115306
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ MRBT Stacionární průmyslový robot EPSON C3 aplikace pro prezentaci Autoři: Jaromír Picka ID:115255 Jaroslav Večeřa ID:115306
Robotika průmyslové roboty. Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002
 Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Ústav automatizace a měřicí techniky.
 www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
www.feec.vutbr.cz Specializace studijního oboru Automatizační a Měřicí Technika: Řídicí technika Moderní algoritmy řízení, teorie řízení Modelování a identifikace parametrů řízených systémů Pokročilé metody
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY
 1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
AUTOMATIZACE V ODĚVNÍ VÝROBĚ. Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D.
 AUTOMATIZACE V ODĚVNÍ VÝROBĚ Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D. Podmínky pro úspěšné absolvování ZÁPOČET Vypracování a ústní obhajoba dvou semestrálních prací Účast na cvičeních a získání
AUTOMATIZACE V ODĚVNÍ VÝROBĚ Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D. Podmínky pro úspěšné absolvování ZÁPOČET Vypracování a ústní obhajoba dvou semestrálních prací Účast na cvičeních a získání
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část:
 Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
Název: Řízení robota senzorem teploty I. Tematický celek: Termodynamika. Komplexní úloha - 1. část: Navrhněte pohyblivého robota, schopného měřit teplotu kapalného tělesa. Robot bude mít pohyblivé rameno
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013
 Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
Projekt podpořený Operačním programem Přeshraniční spolupráce Slovenská republika Česká republika 2007-2013 Informace a ukázka experimentálního programu Automatizace a robotika Projekt OBLOHA NA DLANI
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2014 8 14/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD
 PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Automatizační a měřicí technika (B-AMT)
") Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
Ústav automatizace a měřicí techniky Bakalářský studijní program Automatizační a měřicí technika () Specializace oboru Řídicí technika Měřicí technika Průmyslová automatizace Robotika a umělá inteligence
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ /14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 6 11/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Simulace Při simulacích nahrazujeme skutečný dynamický
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 6 11/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Simulace Při simulacích nahrazujeme skutečný dynamický
Všeobecná ženijní podpora. T8/1 - Zásady a postupy mechanizace ženijních prací
 Všeobecná ženijní podpora T8/1 - Zásady a postupy mechanizace ženijních prací Přednáška Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu Fakulty
Všeobecná ženijní podpora T8/1 - Zásady a postupy mechanizace ženijních prací Přednáška Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu Fakulty
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Optoelektronické. BGL Vidlicové optické závory. snímače
 Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
L07 Univerzální Robot verze 1.2
 Zeleně jsou čísla pracovních karet a aktivit, kde je možné robota využít. L07 Univerzální Robot verze 1.2 světelné čidlo sledování čáry Z10, J10, P8 P10 dálkově ovládaný robot J11 hledání naleziště P11S
Zeleně jsou čísla pracovních karet a aktivit, kde je možné robota využít. L07 Univerzální Robot verze 1.2 světelné čidlo sledování čáry Z10, J10, P8 P10 dálkově ovládaný robot J11 hledání naleziště P11S
Návrh jednoúčelového stroje se řeší v rámci projektu v pátém ročníku
 Návrh jednoúčelového stroje se řeší v rámci projektu v pátém ročníku Jednoúčelové stroje jsou stroje určené pro obrábění výrobků se specifickými rozměry, tvarem a nároky na operace obrábění. Konstrukce
Návrh jednoúčelového stroje se řeší v rámci projektu v pátém ročníku Jednoúčelové stroje jsou stroje určené pro obrábění výrobků se specifickými rozměry, tvarem a nároky na operace obrábění. Konstrukce
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Obsah DÍL 2 KAPITOLA 6. 6 Automatická regulace 9. 6.1 Základní terminologie historické souvislosti 12
 Obsah DÍL 2 KAPITOLA 6 6 Automatická regulace 9 6.1 Základní terminologie historické souvislosti 12 6.2 Dynamický systém, nástroje a metody jeho analýzy 18 6.2.1 Popis dynamického systému 19 6.2.2 Simulace
Obsah DÍL 2 KAPITOLA 6 6 Automatická regulace 9 6.1 Základní terminologie historické souvislosti 12 6.2 Dynamický systém, nástroje a metody jeho analýzy 18 6.2.1 Popis dynamického systému 19 6.2.2 Simulace
METODICKÝ LIST. Výklad: Seznámení se se stavebnicí, ukázky jiných projektů a možností stavebnice
 METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
METODICKÝ LIST 1. Název výukové aktivity (tématu): Stavba LEGO MINDSTORMS NXT robota pro zavážení barevných LEGO kostek (představujících různé druhy produktů ve výrobě) dále jen nakladač. Tento model navazuje
Návod připojení a základní práce s programem RT ToolBox
 Návod připojení a základní práce s programem RT ToolBox Střední škola, Havířov-Šumbark, Sýkorova 1/613, příspěvková organizace Tento výukový materiál byl zpracován v rámci akce EU peníze středním školám
Návod připojení a základní práce s programem RT ToolBox Střední škola, Havířov-Šumbark, Sýkorova 1/613, příspěvková organizace Tento výukový materiál byl zpracován v rámci akce EU peníze středním školám
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
Šroubovací systém MT Focus 400 Vysoce kvalitní montáž ve vašich rukou
 Šroubovací systém MT Focus 400 Vysoce kvalitní montáž ve vašich rukou Utahování se stává Představujeme nový šroubovací systém MT Focus 400 vyvinutý společností Atlas Copco, vaším partnerem v oblasti utahování.
Šroubovací systém MT Focus 400 Vysoce kvalitní montáž ve vašich rukou Utahování se stává Představujeme nový šroubovací systém MT Focus 400 vyvinutý společností Atlas Copco, vaším partnerem v oblasti utahování.
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Klíčová slova: Řídící jednotka, servomotor, senzor, programovací blok.
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
TECHNICKÁ SPECIFIKACE PŘEDMĚTU VEŘEJNÉ ZAKÁZKY. k nadlimitní veřejné zakázce na dodávky s názvem: VŠPJ - Dodávka výrobní linky - 2
 Příloha č. 5 TECHNICKÁ SPECIFIKACE PŘEDMĚTU VEŘEJNÉ ZAKÁZKY Výrobní linka 1 Popis k nadlimitní veřejné zakázce na dodávky s názvem: VŠPJ - Dodávka výrobní linky - 2 Výrobní linka bude složena z nezávislých
Příloha č. 5 TECHNICKÁ SPECIFIKACE PŘEDMĚTU VEŘEJNÉ ZAKÁZKY Výrobní linka 1 Popis k nadlimitní veřejné zakázce na dodávky s názvem: VŠPJ - Dodávka výrobní linky - 2 Výrobní linka bude složena z nezávislých
ELVAC a.s. ELVAC SOLUTIONS Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ
 ELVAC SOLUTIONS ELVAC a.s. Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ STROJNÍ INŽENÝRING ŘEŠENÍ, PRODUKTY A SLUŽBY ROBOTIKA Poskytujeme inženýrsko-dodavatelské služby v oblasti jednoúčelových
ELVAC SOLUTIONS ELVAC a.s. Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ STROJNÍ INŽENÝRING ŘEŠENÍ, PRODUKTY A SLUŽBY ROBOTIKA Poskytujeme inženýrsko-dodavatelské služby v oblasti jednoúčelových
24. Úvod do robotiky Vlastnosti robotů Oblasti použití průmyslových robotů Rozdělení průmyslových robotů. Definice: Robotika
 zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ TRENDY EVROPSKÉHO STAVEBNICTVÍ
 ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
SafeMove2 Přehled produktu
 ABB Robotics Product Management, květen 2016 SafeMove2 Přehled produktu Snímek 1 Základy Roboty se pohybují rychle a pro lidi představují potenciální riziko Bezpečnostní bariéry (ploty, klece, světelné
ABB Robotics Product Management, květen 2016 SafeMove2 Přehled produktu Snímek 1 Základy Roboty se pohybují rychle a pro lidi představují potenciální riziko Bezpečnostní bariéry (ploty, klece, světelné
Aplikace bin picking s použitím senzorové fúze
 Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
spsks.cz Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU
 Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních
Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních
1 Hierarchické distribuované systémy řízení
 1 Hierarchické distribuované systémy řízení Dnešní koncepce průmyslové výroby je založena na modelu CIM (Computer Integrated Manufacturing), kdy struktura podniku je rozložena do jednotlivých vrstev podle
1 Hierarchické distribuované systémy řízení Dnešní koncepce průmyslové výroby je založena na modelu CIM (Computer Integrated Manufacturing), kdy struktura podniku je rozložena do jednotlivých vrstev podle
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Automatizace. Vývojová a konstrukční kancelář. Telefon: + 420 466 614 164 + 420 464 625 901
 Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
Software Form Control
 Měření na kliknutí myši. Tak jednoduchá je kontrola obrobku v obráběcím centru pomocí měřícího softwaru FormControl. Nezáleží na tom, zda má obrobek obecné 3D kontury nebo běžný 2.5D charakter. Uživatel
Měření na kliknutí myši. Tak jednoduchá je kontrola obrobku v obráběcím centru pomocí měřícího softwaru FormControl. Nezáleží na tom, zda má obrobek obecné 3D kontury nebo běžný 2.5D charakter. Uživatel
Základní pojmy; algoritmizace úlohy Osnova kurzu
 Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
Osnova kurzu 1) 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita regulačního obvodu 8) Kvalita regulačního
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK
 ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
Autonomní roboty a zaměstnanost
 Autonomní roboty a zaměstnanost Václav Hlaváč České vysoké učení technické () Český institut informatiky, robotiky a kybernetiky (CIIRC) Prague 6, Dejvice, Jugoslávských partyzánů 3 hlavac@ciirc.cvut.cz
Autonomní roboty a zaměstnanost Václav Hlaváč České vysoké učení technické () Český institut informatiky, robotiky a kybernetiky (CIIRC) Prague 6, Dejvice, Jugoslávských partyzánů 3 hlavac@ciirc.cvut.cz
Středoškolská technika Robot MEDVĚDÁTOR
 Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robot MEDVĚDÁTOR Vít Janda, Jan Říha Gymnázium Pierra de Coubertina Křižíkovo Náměstí 860, Tábor Obsah Úvod... 3
Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robot MEDVĚDÁTOR Vít Janda, Jan Říha Gymnázium Pierra de Coubertina Křižíkovo Náměstí 860, Tábor Obsah Úvod... 3
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
V586. Připraveni na změnu? Nejspolehlivější řešení
 Připraveni na změnu? Nejspolehlivější řešení PÉČE O HYGIENU MASIVNÍ PROVEDENÍ VYNIKAJÍCÍ ERGONOMICKÉ ŘEŠENÍ POKROČILÝ INTEGROVANÝ SYSTÉM PLNĚ OVLADATELNÁ JEDNOTKA MASIVNÍ PROVEDENÍ Stabilita Souprava je
Připraveni na změnu? Nejspolehlivější řešení PÉČE O HYGIENU MASIVNÍ PROVEDENÍ VYNIKAJÍCÍ ERGONOMICKÉ ŘEŠENÍ POKROČILÝ INTEGROVANÝ SYSTÉM PLNĚ OVLADATELNÁ JEDNOTKA MASIVNÍ PROVEDENÍ Stabilita Souprava je
KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití
 KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití Typ První z nové generace SCARA S bezkonkurenčním časem cyklu 0,29 sekundy je THP550 SCARA první z nové řady robotů
KONKURENCESCHOPNOST na všech frontách NOVÝ ROBOT od TOSHIBA MACHINE pro každé použití Typ První z nové generace SCARA S bezkonkurenčním časem cyklu 0,29 sekundy je THP550 SCARA první z nové řady robotů
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč
 PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
Snadné testy i cvičení některých schopností člověka Petr Novák
 Snadné testy i cvičení některých schopností člověka Petr Novák (novakpe@labe.felk.cvut.cz) Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická
Snadné testy i cvičení některých schopností člověka Petr Novák (novakpe@labe.felk.cvut.cz) Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická
Program školení. roboty FPT s rozhraním Selogica direct. Copyright
 Program školení roboty FPT s rozhraním Selogica direct Copyright Tato dokumentace i výňatky z ní se smí rozmnožovat nebo zpřístupňovat třetím osobám jen s výslovným souhlasem vydavatele. Zkontrolovali
Program školení roboty FPT s rozhraním Selogica direct Copyright Tato dokumentace i výňatky z ní se smí rozmnožovat nebo zpřístupňovat třetím osobám jen s výslovným souhlasem vydavatele. Zkontrolovali
M3A ROB: 7. Konstrukce robotů
 ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
PŘEDSTAVENÍ SPOLEČNOSTI
 ZELTWANGER GRUPPE PŘEDSTAVENÍ SPOLEČNOSTI MAURO DE SIMON ZELTWANGER AUTOMATION GMBH LISTOPAD 2016 DATA & FAKTA SKUPINA ZELTWANGER Založení 1982 Společnosti ve skupině 5 Zaměstnanci 340 Skupinový obrat
ZELTWANGER GRUPPE PŘEDSTAVENÍ SPOLEČNOSTI MAURO DE SIMON ZELTWANGER AUTOMATION GMBH LISTOPAD 2016 DATA & FAKTA SKUPINA ZELTWANGER Založení 1982 Společnosti ve skupině 5 Zaměstnanci 340 Skupinový obrat
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme
 Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
Praha, SMART CITIES
 Praha, 22.3.2017 SMART CITIES ELKO EP Holding Inovativní ryze český výrobce elektronických přístrojů na poli elektroinstalací již 24 let. Fakta a statistiky Pozice v Evropě Poboček ve světě Exportních
Praha, 22.3.2017 SMART CITIES ELKO EP Holding Inovativní ryze český výrobce elektronických přístrojů na poli elektroinstalací již 24 let. Fakta a statistiky Pozice v Evropě Poboček ve světě Exportních
ÚKOLOVÝ LIST. Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU
 ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
ÚKOLOVÝ LIST Aktivita projektu Obloha na dlani - Laboratoř vědomostí ROBOT NA PÁSOVÉM PODVOZKU Úkoly Na základě sestavených algoritmů k jednotlivým úkolům naprogramujeme robota pomocí jednoduchého softwaru
MI Video rozhraní pro vozidla Renault Poloha ON (poloha dole)
") MI-1262 Video rozhraní pro vozidla Renault 2014 Tento adaptér (rozhraní) umožňuje zobrazit RGB signál o vysokém rozlišení, AV signál z externího zdroje (například DVD přehrávače) a video signál z kamery
MI-1262 Video rozhraní pro vozidla Renault 2014 Tento adaptér (rozhraní) umožňuje zobrazit RGB signál o vysokém rozlišení, AV signál z externího zdroje (například DVD přehrávače) a video signál z kamery
TRANSPORTATION & TECHNOLOGIE
 www.tratec.cz TRANSPORTATION & TECHNOLOGIE OUR SOLUTION 4 YOUR VISION Mise a vize OUR SOLUTION 4 YOUR VISION Design Vytváříme aplikacím jejich vzhled a vnášíme jim jejich krásu. Inteligence Podporujeme
www.tratec.cz TRANSPORTATION & TECHNOLOGIE OUR SOLUTION 4 YOUR VISION Mise a vize OUR SOLUTION 4 YOUR VISION Design Vytváříme aplikacím jejich vzhled a vnášíme jim jejich krásu. Inteligence Podporujeme
E-Line - vzdálené I/O
 Datasheet www.sbc-support.com E-Line - vzdálené I/O Centralizovaná nebo decentralizovaná automatizace na malém prostoru Vzdálené I/O moduly jsou řízeny přes sériovou linku RS-485 a umožňují decentralizovanou
Datasheet www.sbc-support.com E-Line - vzdálené I/O Centralizovaná nebo decentralizovaná automatizace na malém prostoru Vzdálené I/O moduly jsou řízeny přes sériovou linku RS-485 a umožňují decentralizovanou
Mechatronika ve strojírenství
 Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Rozložení náboje na tělese. Plošná hustota náboje. Tematický celek: Elektrický náboj. Úkol:
 Název: Rozložení náboje na tělese. Plošná hustota náboje. Tematický celek: Elektrický náboj. Úkol: Zopakujte si, co je to zelektrování tělesa a jak k němu dochází. Sestrojte a naprogramujte robota, pomocí
Název: Rozložení náboje na tělese. Plošná hustota náboje. Tematický celek: Elektrický náboj. Úkol: Zopakujte si, co je to zelektrování tělesa a jak k němu dochází. Sestrojte a naprogramujte robota, pomocí
Samostatnost a soběstačnost Petr Novák, Jiří Anýž
 Samostatnost a soběstačnost Petr Novák, Jiří Anýž Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/
Samostatnost a soběstačnost Petr Novák, Jiří Anýž Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/
Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota.
 Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
Název: Anotace: Úvod do robotického programování Charakteristika základních konstruktů robota. Popis ovládacího prostředí robota. Další možnosti programování robota. Klíčová slova: Řídící jednotka, servomotor,
Robotická ruka. Lukáš Fotr a Jaroslav Karban. Integrovaná střední škola, 2. ročník Kumburská 846, Nová Paka
 Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robotická ruka Lukáš Fotr a Jaroslav Karban Integrovaná střední škola, 2. ročník Kumburská 846, Nová Paka Koordinátor:
Středoškolská technika 2017 Setkání a prezentace prací středoškolských studentů na ČVUT Robotická ruka Lukáš Fotr a Jaroslav Karban Integrovaná střední škola, 2. ročník Kumburská 846, Nová Paka Koordinátor:
Přípravek pro měření posuvů a deformací v průběhu svařování a chladnutí se zaměřením na využití pro numerické simulace.
 KSP-2012-G-FV-02 Přípravek pro měření posuvů a deformací v průběhu svařování a chladnutí se zaměřením na využití pro numerické simulace (Typ výstupu G) Ing. Jaromír Moravec, Ph.D. V Liberci dne 21. prosince
KSP-2012-G-FV-02 Přípravek pro měření posuvů a deformací v průběhu svařování a chladnutí se zaměřením na využití pro numerické simulace (Typ výstupu G) Ing. Jaromír Moravec, Ph.D. V Liberci dne 21. prosince
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019
 VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
Služby pro zařízení vysokého napětí. Spolehlivé sledování stavu zařízení
 Služby pro zařízení vysokého napětí Spolehlivé sledování stavu zařízení Strategie údržby Jaký přístup je nejlepší? Údržba dle skutečného stavu zařízení Údržba založená na průběžném monitorování funkce
Služby pro zařízení vysokého napětí Spolehlivé sledování stavu zařízení Strategie údržby Jaký přístup je nejlepší? Údržba dle skutečného stavu zařízení Údržba založená na průběžném monitorování funkce
Studentská tvůrčí a odborná činnost STOČ 2017
 Studentská tvůrčí a odborná činnost STOČ 2017 TELEOPERAČNÉ ŘÍZENÝ HUMANOIDNÍ ROBOT Stefan GRUSHKO VŠB-TUO: 17. listopadu 2172/15, 708 00 Ostrava 20. dubna 2017 FAI UTB ve Zlíně Klíčová slova: humanoidní,
Studentská tvůrčí a odborná činnost STOČ 2017 TELEOPERAČNÉ ŘÍZENÝ HUMANOIDNÍ ROBOT Stefan GRUSHKO VŠB-TUO: 17. listopadu 2172/15, 708 00 Ostrava 20. dubna 2017 FAI UTB ve Zlíně Klíčová slova: humanoidní,
STOLNÍ ZNAČICÍ SYSTÉM
 NetMarker KOMPAKTNÍ STOLNÍ ZNAČICÍ SYSTÉM NetMarker KOMPAKTNÍ STOLNÍ ZNAČICÍ SYSTÉM Inovativní stolní CNC značicí systém NetMarker vyniká kvalitou značení, jednoduchostí obsluhy a možností připojení do
NetMarker KOMPAKTNÍ STOLNÍ ZNAČICÍ SYSTÉM NetMarker KOMPAKTNÍ STOLNÍ ZNAČICÍ SYSTÉM Inovativní stolní CNC značicí systém NetMarker vyniká kvalitou značení, jednoduchostí obsluhy a možností připojení do
Teplotní technika. Muflové pece. Laboratorní pece LE
 Muflové pece Laboratorní pece LE Pece jsou vhodné ke zkoušení technologií, kde je kladen důraz na přesnost rozložení teploty, její řízený náběh i pokles, případně řízené chlazení a kde je zároveň žádoucí,
Muflové pece Laboratorní pece LE Pece jsou vhodné ke zkoušení technologií, kde je kladen důraz na přesnost rozložení teploty, její řízený náběh i pokles, případně řízené chlazení a kde je zároveň žádoucí,
Řídící systémy hydraulických procesů. Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu.
 Řídící systémy hydraulických procesů Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu. Hydraulický systém Vysoký výkon a síla při malých rozměrech Robustní a levné lineární pohony Regulace
Řídící systémy hydraulických procesů Cíl: seznámení s možnostmi řízení, regulace a vizualizace procesu. Hydraulický systém Vysoký výkon a síla při malých rozměrech Robustní a levné lineární pohony Regulace
Úspora spotřeby energií Pohodlné používání a ovládání Flexibilní přizpůsobení a rozvoj Bezpečné používání a lepší ochrana
 ELEGANTNÍ A JEDNODUCHÁ AUTOMATIZACE ELEGANTNÍ A JEDNODUCHÁ AUTOMATIZACE Úspora spotřeby energií Pohodlné používání a ovládání Flexibilní přizpůsobení a rozvoj Bezpečné používání a lepší ochrana Rozumíme
ELEGANTNÍ A JEDNODUCHÁ AUTOMATIZACE ELEGANTNÍ A JEDNODUCHÁ AUTOMATIZACE Úspora spotřeby energií Pohodlné používání a ovládání Flexibilní přizpůsobení a rozvoj Bezpečné používání a lepší ochrana Rozumíme
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ŘIDIČSKÝ SIMULÁTOR CDV
 ŘIDIČSKÝ SIMULÁTOR CDV Mgr. Aleš Zaoral CDV, v. v. i. Základní údaje o projektu Řidičský simulátor nákladního vozidla a autobusu projekt CDV plus Cílem projektu je vybudovat jedinečné výzkumné zázemí,
ŘIDIČSKÝ SIMULÁTOR CDV Mgr. Aleš Zaoral CDV, v. v. i. Základní údaje o projektu Řidičský simulátor nákladního vozidla a autobusu projekt CDV plus Cílem projektu je vybudovat jedinečné výzkumné zázemí,
PŘÍSTROJE PRO KONTROLU VRSTEV, TLOUŠŤKY STĚNY, VIBRACÍ, SÍLY, TAHOVÉHO NAPĚTÍ A MOMENTOVÉ KLÍČE
 PŘÍSTROJE PRO KONTROLU VRSTEV, TLOUŠŤKY STĚNY, VIBRACÍ, SÍLY, TAHOVÉHO NAPĚTÍ A MOMENTOVÉ KLÍČE NOVINKA! Brno - tel.: +420 549 246 454, fax: +420 549 241 332 / Bratislava - tel.: +421 263 812 934, fax:
PŘÍSTROJE PRO KONTROLU VRSTEV, TLOUŠŤKY STĚNY, VIBRACÍ, SÍLY, TAHOVÉHO NAPĚTÍ A MOMENTOVÉ KLÍČE NOVINKA! Brno - tel.: +420 549 246 454, fax: +420 549 241 332 / Bratislava - tel.: +421 263 812 934, fax:
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
MiPro (drátové provedení) a MiPro R (bezdrátové provedení)
 a MiPro R (bezdrátové provedení)") MiPro (drátové provedení) a MiPro R (bezdrátové provedení) 1 Systémová regulace MiPro drátové nebo bezdrátové provední ebus ekvitermní regulátor možnost rozšíření na 2-3 topné okruhy možnost kaskády až
MiPro (drátové provedení) a MiPro R (bezdrátové provedení) 1 Systémová regulace MiPro drátové nebo bezdrátové provední ebus ekvitermní regulátor možnost rozšíření na 2-3 topné okruhy možnost kaskády až
GSP9200 Touch. Vysoce výkonný vyvažovací stroj s dotykovým ovládáním NOVINKA
 GSP9200 Touch Vysoce výkonný vyvažovací stroj s dotykovým ovládáním NOVINKA GSP9200 Touch v přehledu HammerHead Top-TDC laser pro přesné umístění naklepávacího závaží Automatická detekce vyvažovacího programu
GSP9200 Touch Vysoce výkonný vyvažovací stroj s dotykovým ovládáním NOVINKA GSP9200 Touch v přehledu HammerHead Top-TDC laser pro přesné umístění naklepávacího závaží Automatická detekce vyvažovacího programu
Průmyslový robot je automatický stroj s využitím ve výrobním procesu. Nahrazuje fyzickou a rutinní práci v technologickém procesu.
 Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
MST - sběr dat pomocí mobilních terminálů on-line/off-line
 MST - sběr dat pomocí mobilních terminálů on-line/off-line Stručný přehled název: MST, software pro sběr dat mobilními terminály ve skladu (příjem, výdej, inventura) autor aplikace: FASK, spol. s r.o.,
MST - sběr dat pomocí mobilních terminálů on-line/off-line Stručný přehled název: MST, software pro sběr dat mobilními terminály ve skladu (příjem, výdej, inventura) autor aplikace: FASK, spol. s r.o.,
MODULÁRNÍ SVAŘOVACÍ JEDNOTKY dvojitý bod, kyvné rameno, lineární chod Typy 4040, 4041, 4042, 4043, 4044, 4050, 4060, 4061, 4062, 4063
 MODULÁRNÍ SVAŘOVACÍ JEDNOTKY dvojitý bod, kyvné rameno, lineární chod Typy 4040, 4041, 4042, 4043, 4044, 4050, 4060, 4061, 4062, 4063 CHARAKTERISTIKA MODULÁRNÍHO SYSTÉMU Široký program modulárních svářecích
MODULÁRNÍ SVAŘOVACÍ JEDNOTKY dvojitý bod, kyvné rameno, lineární chod Typy 4040, 4041, 4042, 4043, 4044, 4050, 4060, 4061, 4062, 4063 CHARAKTERISTIKA MODULÁRNÍHO SYSTÉMU Široký program modulárních svářecích
DVR68WIFI. Profesionální univerzální FULL HD černá skříňka. Uživatelská příručka
 DVR68WIFI Profesionální univerzální FULL HD černá skříňka Uživatelská příručka DVR kamera je určena k instalaci ke zpětnému zrcátku - profesionální řešení. Obsah Obsah... 2 Technické specifikace... 2 Popis
DVR68WIFI Profesionální univerzální FULL HD černá skříňka Uživatelská příručka DVR kamera je určena k instalaci ke zpětnému zrcátku - profesionální řešení. Obsah Obsah... 2 Technické specifikace... 2 Popis
Zvyšování kvality výuky v elektrotechnických oborech
 Úprava ŠVP Elektrikář v rámci projektu Zvyšování kvality výuky v elektrotechnických oborech Předmět Automatizace 3 hodiny týdně celkem 99 hodin 1. Automatizace, základní pojmy Dotace učebního bloku: 1
Úprava ŠVP Elektrikář v rámci projektu Zvyšování kvality výuky v elektrotechnických oborech Předmět Automatizace 3 hodiny týdně celkem 99 hodin 1. Automatizace, základní pojmy Dotace učebního bloku: 1
24. Úvod do robotiky. 24.1. Vlastnosti robotů. 24.2. Oblasti použití průmyslových robotů. 24.3. Rozdělení průmyslových robotů. Definice: Robotika
 oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
Vyvažovačky kol. Digitální vyvažovačka kola pro malé dílny a servisní stanice
 Digitální vyvažovačka kola pro malé dílny a servisní stanice Vyvažovačka kol s ručním otáčením. Obsahuje mnoho patentovaných vlastností, jako je například technika virtuálního zobrazení roviny (VPI), držák
Digitální vyvažovačka kola pro malé dílny a servisní stanice Vyvažovačka kol s ručním otáčením. Obsahuje mnoho patentovaných vlastností, jako je například technika virtuálního zobrazení roviny (VPI), držák
OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ
 OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ Odlišnosti silových a ovládacích obvodů Logické funkce ovládacích obvodů Přístrojová realizace logických funkcí Programátory pro řízení procesů Akční členy ovládacích
OVLÁDACÍ OBVODY ELEKTRICKÝCH ZAŘÍZENÍ Odlišnosti silových a ovládacích obvodů Logické funkce ovládacích obvodů Přístrojová realizace logických funkcí Programátory pro řízení procesů Akční členy ovládacích
Řídící systém směšovacího ventilu automatického kotle
 Řídící systém směšovacího ventilu automatického kotle Studentská vědecká konference 2013 Martin Švejda ZČU v Plzni, FAV, Katedra kybernetiky 23. 5. 2013 Úvod - formulace problému (1/3) Čím vytápět rodinné
Řídící systém směšovacího ventilu automatického kotle Studentská vědecká konference 2013 Martin Švejda ZČU v Plzni, FAV, Katedra kybernetiky 23. 5. 2013 Úvod - formulace problému (1/3) Čím vytápět rodinné
TPV - Technologie Technologické stupně výroby, rozbor z hlediska funkce výrobku a ekonomických aspektů
 TPV - Technologie Technologické stupně výroby, rozbor z hlediska funkce výrobku a ekonomických aspektů Mgr. Ing. Marie Nejedlá, Ph. D. Technologický projekt Technologický projekt je souhrn různých komponent
TPV - Technologie Technologické stupně výroby, rozbor z hlediska funkce výrobku a ekonomických aspektů Mgr. Ing. Marie Nejedlá, Ph. D. Technologický projekt Technologický projekt je souhrn různých komponent
DS-1002KI/1003KI klávesnice uživatelský manuál V1.0
 DS-002KI/003KI klávesnice uživatelský manuál V.0 Poznámky: LCD displej se může snadno poškodit. Nevystavujte jej slunečnímu záření ani ničím nezatěžujte. Joystick se také může nesprávným používání poškodit.
DS-002KI/003KI klávesnice uživatelský manuál V.0 Poznámky: LCD displej se může snadno poškodit. Nevystavujte jej slunečnímu záření ani ničím nezatěžujte. Joystick se také může nesprávným používání poškodit.
MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010
 MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010 1 www.clicmag.cz STR. 1/2 Robotické operace jsou stále dostupnější a vyhledávanější. V Centru robotické chirurgie Fakultní nemocnice u sv. Anny v Brně
MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010 1 www.clicmag.cz STR. 1/2 Robotické operace jsou stále dostupnější a vyhledávanější. V Centru robotické chirurgie Fakultní nemocnice u sv. Anny v Brně