Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
|
|
|
- Zdeněk Hruška
- před 10 lety
- Počet zobrazení:
Transkript
1 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora

2 Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný řídící systém na uskutečňování pohybových a řídících funkcí ve výrobním procesu, které nahrazují analogické funkce člověka při přemísťování předmětů a technologického příslušenství vznikl v polovině 20. století první roboty vytvořeny v na univerzitách kolem roku 1954 o několik let později první prakticky využitelné roboty značky VERSATRAN a UNIMATE první roboty u nás nasazeny v oblasti svařování typ Irb6 od švédské firmy ASEA první robot tuzemské výroby byl svařovací robot PR 32 E (1981).

3 Důvody pro nasazení robotů technické důvody: zlepšení kvality výrobků snížení zmetkovitosti pružnost výroby ekonomické důvody: zvýšení výrobní kapacity zvýšení koeficientu směnnosti úspora pracovního místa uvolnění kvalifikovaných pracovníků sociální důvody: vyřazení člověka z fyzicky namáhavé a monotónní práce vyřazení člověka ze zdraví škodlivého prostředí

4 Uplatnění robotů provozy s velkou sériovostí výroby (velké investice) provozy, kde jsou podmínky pro člověka nepříznivé technologie, pro které je člověk příliš nedokonalý a vzhledem ke svým omezeným možnostem nedokáže pracovat např. s požadovanou přesností. Oblasti nasazení robotů: svařování lakování lisování a kování sklářský průmysl paletizace výrobků montáž

5 Manipulační zařízení poloha objektu v prostoru je dána: pozicí (souřadnice x, y, z) orientací souřadnice ϕ x, ϕ y, ϕ z

6 Rozdělení manipulačních zařízení teleoperátory manipulátory s ručním řízením manipulátor bez řídicího systému, ovládaný člověkem úkolem je násobit sílu, eliminovat nedokonalosti člověka, umožnit práci v nepříznivých podmínkách použití teleoperátorů manipulace s polotovary, medicína, riziková prostředí (stavařství výškové budovy, vojenství, vesmír, havárie) Teleoperátor ROBOT 350 Da Vinci
 Teleoperátor ROBOT 350")
7 Manipulátory s pevným programem Jedná se o zařízení, která mají automatický řídící systém, změna programu je však podstatným zásahem výhody jednoduchost, spolehlivost, nízká cena použití - podavače

8 Manipulátory s pružným programem Jedná se o zařízení, která mají automatický řídící systém, změna programu je rychlá dělí se na: průmyslové roboty -provádí spektrum činností, které lze měnit na základě změny programu adaptivní průmyslové roboty - vložený program se automaticky upravuje, modifikuje na základě aktuálních informací z čidel kognitivní roboty -umělá inteligence v řídícím systému, pomocí které se automaticky generuje program činností na základě člověkem vložených algoritmů

9 Průmyslový robot

10 Adaptivní robot Americký pojízdný robot Spirit, který na Marsu fotografuje své okolí v kráteru Gusev

11 Kognitivní robot robot vybavený umělou inteligencí požadované vlastnosti nalezení optimální varianty z více možností schopnost učit se ze zkušeností úloha o podobnosti (nalézt znaky podobnosti) přizpůsobení se, adaptabilita, schopnost učit se schopnost řídit paralelní procesy schopnost pokračovat i při neúplné informaci schopnost abstrakce - zjednodušení problému (irelevantní informace skryty nebo vynechány) schopnost generalizace - konstruuje se zobecněná skutečnost schopnost predikovat, předvídat
 schopnost generalizace - konstruuje se zobecněná skutečnost schopnost")
12 Pohybové systémy robotů a manipulátorů úkol pohybového systému: zajistit dosažení libovolného bodu v pracovním prostoru základní požadavky na pohybový systém: opakovatelná přesnost při cyklickém vykonávání operací obsloužení co největšího pracovního prostoru při minimálních požadavcích na zastavěnou plochu. kinematický řetězec z 5 6 posuvných nebo rotačních os (3 osy polohovacího a 2 3 osy orientačního mechanizmu.

13 Složení pohybových systémů systém pro nastavování pozice = hlavní pohybový systém (HPS) slouží k přemístění objektů, nastavuje těžiště objektů (kinematické struktury manipulačních zařízení) systém pro nastavování orientace = vedlejší pohybový systém (OPS) orientační systém, zápěstí na výstupu hlavního pohybového systému mění orientaci manipulovaného objektu rotační kinematické dvojice, 2 až 3 volnosti požadavky na konstrukci minimální rozměry a hmotnost, vysoká dynamika a rychlost pracovní prostor množina bodů, kterou opisuje referenční bod operační prostor množina bodů, kterou opisuje konstrukce zařízení při činnosti v pracovním prostoru

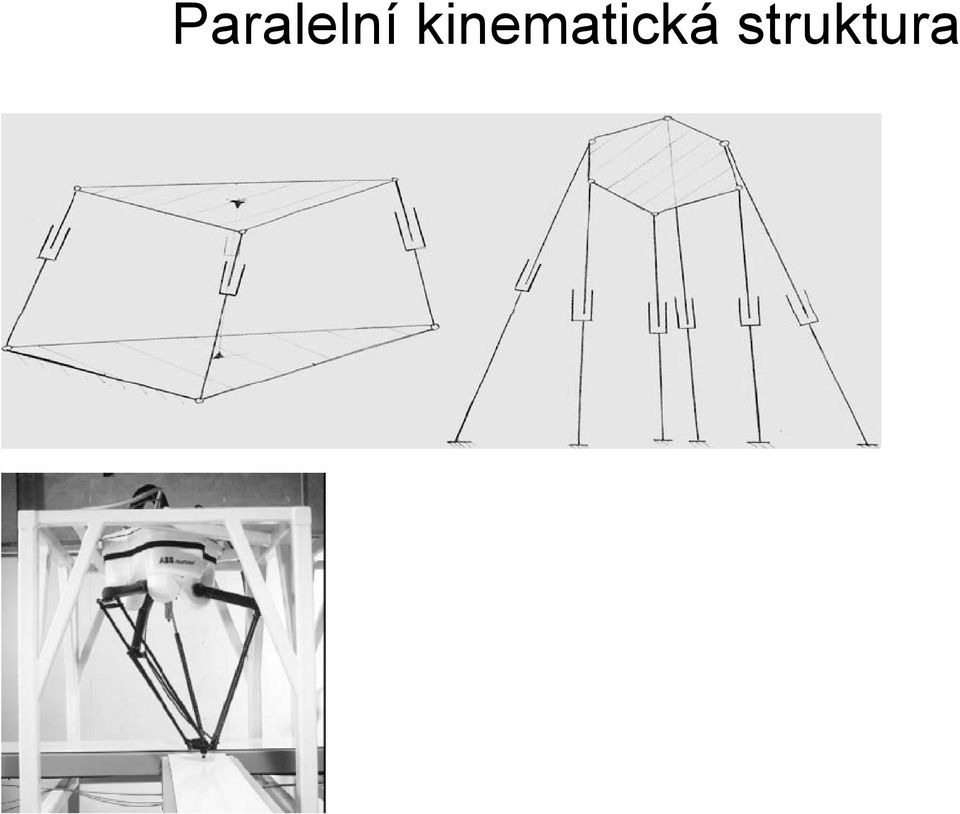
14 Typy kinematických struktur sériová kinematická struktura rotační a translační kinematické dvojice jsou řazeny sériově v tomto konstrukčním provedení pracuje 90 % robotů a manipulátorů nevýhody nízká tuhost (statické i dynamické kmitání) přesnost polohování v řádu desetin milimetrů na koncovém členu robota se tedy projeví sumace chyb superponovaných na jednotlivých kinematických dvojicích paralelní kinematická struktura jednotlivé členy jsou řazeny paralelně konstrukčně je možné provést tří (tripod) nebo až šesti (hexapod) vzpěrnou strukturu jednotlivé vzpěry mohou být shodného výrobního provedení vyšší tuhost přesnost polohovaní (±0,01 mm) Problémy u paralelních kinematik jsou: vysoké nároky na řídicí systém možnost vzniku kolizí vzpěr
 Problémy u paralelních kinematik jsou: vysoké nároky na řídicí systém možnost vzniku")
15 Paralelní kinematická struktura
16 Kartézská kinematická struktura charakteristické rysy nedochází ke změně orientace objektu pracovním prostorem je hranol nepříznivé vlastnosti posuvných mechanizmů velká prostorová zastavěnost používá se méně často používají se jako podavače, obsluha výrobních strojů

17 Cylindrická kinematická struktura charakteristické rysy dochází ke změně orientace objektu pracovním prostorem válcový prstenec k manévrování je zapotřebí velký operační prostor obsluha vstřikovacích strojů nebo strojů na tlakové lití modifikací je montážní robot SCARA

18 Sférická kinematická struktura charakteristické rysy dochází ke změně orientace objektu pracovním prostorem je kulový vrchlík polohování ve sférických souřadnicích používá se především pro svařovací linky

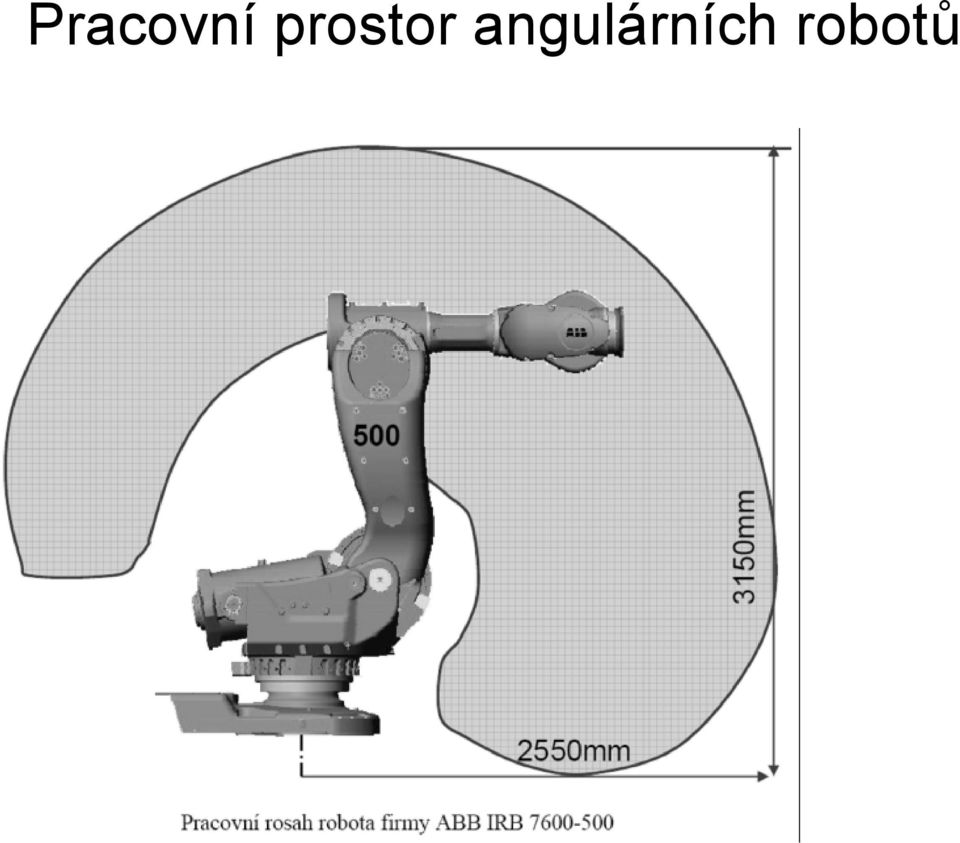
19 Angulární kinematická struktura 3 rotační osy výhody: technologické výhody při výrobě rotačních částí (nižší cena) dobré dynamické vlastnosti (vysoké rychlosti manipulačních pohybů) minimální zastavěná plocha snadné rozšíření pracovního prostoru (portál, pojezd,...) nevýhody: menší manipulační prostor (opakovatelná přesnost klesá s délkou rotačních ramen) angulární kinematické systémy jsou v praxi nejpoužívanější.
 nevýhody: menší manipulační prostor (opakovatelná přesnost klesá s délkou rotačních ramen) angulární")
20 Pracovní prostor angulárních robotů
21 Řízení robotů Řídicí systém podle uloženého programu řídí činnost robotu ovládáním pohonů a dalších mechanismů zajišťuje komunikaci s řídícím systémem obsluhovaného výrobního stroje, periferního zařízení (dopravníky, ) umožňuje obsluhu a programování
22 Druhy pohybu robota pohyb z bodu do bodu (PTP point to point) ramena robota jsou přemístěna do nové polohy maximální rychlostí po nejkratší možné dráze ve všech osách nepatrné nároky na řízení vhodný pro rychlé pohyby může dojít k nepředvídatelným pohybům (pouze ve volném prostoru)
23 Druhy pohybu robota lineární interpolace hlavice se pohybuje z počáteční do koncové polohy po přímce výsledný pohyb je složen z koordinovaného pohybu různých kloubů hodnoty poloh nejsou v paměti, ale řídící systém vypočítává každých cca 5 až 10 ms nové hodnoty pro další polohu použití: určité geometrické pohyby definovanou rychlostí (ne maximální) po dráze (lepení, průběžné svařování)
24 Druhy pohybu robota kruhová interpolace souvislé řízení musím znát souřadnice: počáteční bod kruhového oblouku koncový bod kruhového oblouku bod, který leží na kruhovém oblouku nebo polohu středu řídicí systém vypočítá střed kruhu, poloměr a body dráhy
25 Pracovní režimy robota ruční řízení pomocí přístroje pro ruční ovládání jsou např. vyvolávány jednotlivé příkazy pro pohyb procesor řídícího systému tyto příkazy vyhodnocuje a zadává regulátorům pohonů požadované hodnoty zadávání programu vyvolán ediční program, který ukládá načtené uživatelské programy a hodnoty poloh do paměti řídícího systému všechny příkazy a funkce ve stanoveném programovacím (příkazovém) jazyce automatický režim vyvolány uživatelské programy automatický průběh jeden řádek programu po druhém se provádí bez přerušení
26 Metody programování robotů ruční programování ruční zadávání hodnot souřadnic a posloupností pohybů nejčastěji zadáním příkazu na klávesnici (chapadlo sevřít, úhel α = 30, ) metoda teach-in (učit se) řídící systém snímá průběh dráhy při najíždění do jednotlivých geometrických bodů a jejich souřadnice ukládá do paměti bodové svařování, jednoduché transportní operace metoda play-back (opakování záznamu) řídicí systém snímá průběh dráhy a rychlosti pohybu a automaticky tyto informace ukládá v určitých intervalech do paměti pro složité pohyby s velkou přesností (lakování, svařování, čištění odlitků)
27 Metody programování robotů textové programování popis pohybů, průběhu a bodů prostřednictvím slovních symbolů (move to, ) vytvoření kostry programu sekvence příkazů (v režimu offline) zadání souřadnic bodů (ručně nebo metodou teach-in v režimu on-line) příklady programovacích jazyků BOSCH jazyk BAPS SIEMENS jazyk SRCL ABB jazyk ARLA
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
VÝROBNÍ STROJE. EduCom. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita v Liberci
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
24. Úvod do robotiky Vlastnosti robotů Oblasti použití průmyslových robotů Rozdělení průmyslových robotů. Definice: Robotika
 zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
zapis_roboty_108/2012 MECH Fa 1 z 6 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: #1 vyšší kvalita obecně je to samostatně
24. Úvod do robotiky. 24.1. Vlastnosti robotů. 24.2. Oblasti použití průmyslových robotů. 24.3. Rozdělení průmyslových robotů. Definice: Robotika
 oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
oboty 14 1 z 5 24. Úvod do robotiky Definice: Robotika Robot Průmyslový robot věda o robotech 24.1. Vlastnosti robotů V porovnání s člověkem jsou: přesnější rychlejší robustnější dražší obecně je to samostatně
Motivační přednáška. Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 ZÁKLADY ROBOTIKY Motivační přednáška Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247
ZÁKLADY ROBOTIKY Motivační přednáška Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247
Úvod do průmyslové robotiky. Aleš Pochylý. Co je to robot? Robotizované pracoviště. Znalosti v robotice. Robotický systém
 Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Robotika průmyslové roboty. Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002
 Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
VÝROBNÍ STROJE A ZAŘÍZENÍ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav výrobních strojů a mechanismů Vedoucí ústavu: Prof. Ing. Jaroslav Talácko, CSc. PŘEDNÁŠKY K PŘEDMĚTU VÝROBNÍ STROJE A ZAŘÍZENÍ AUTOMATIZACE VÝROBNÍCH
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav výrobních strojů a mechanismů Vedoucí ústavu: Prof. Ing. Jaroslav Talácko, CSc. PŘEDNÁŠKY K PŘEDMĚTU VÝROBNÍ STROJE A ZAŘÍZENÍ AUTOMATIZACE VÝROBNÍCH
ROBOTIKA HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY. (Stacionární roboty) Prof. František Šolc
 Prof. František Šolc") HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Řezání závitu s konstantním stoupáním (G33, SF)
") Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
1.6 Definice robotů, průmyslových robotů a manipulátorů (PRaM) Aspekty pro posuzováni robotů... 47
 Aspekty pro posuzováni robotů... 47") OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II
 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD
 PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491
 Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491 Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Kód DUMu Název DUMu Autor DUMu Studijní obor Ročník Předmět Anotace CZ.1.07/1.5.00/34.0560
Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491 Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Kód DUMu Název DUMu Autor DUMu Studijní obor Ročník Předmět Anotace CZ.1.07/1.5.00/34.0560
CNC stroje. Definice souřadného systému, vztažných bodů, tvorba NC programu.
 CNC stroje. Definice souřadného systému, vztažných bodů, tvorba NC programu. R. Mendřický, P. Keller (KVS) Elektrické pohony a servomechanismy Definice souřadného systému CNC stroje pro zadání trajektorie
CNC stroje. Definice souřadného systému, vztažných bodů, tvorba NC programu. R. Mendřický, P. Keller (KVS) Elektrické pohony a servomechanismy Definice souřadného systému CNC stroje pro zadání trajektorie
Automatizace. Vývojová a konstrukční kancelář. Telefon: + 420 466 614 164 + 420 464 625 901
 Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
Kinematika příklad. Robotika. Vladimír Smutný. Centrum strojového vnímání. České vysoké učení technické v Praze
 Kinematika příklad Robotika Kinematika příklad Vladimír Smutný Centrum strojového vnímání České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Příklad praktické úlohy D měřicí stroj
Kinematika příklad Robotika Kinematika příklad Vladimír Smutný Centrum strojového vnímání České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Příklad praktické úlohy D měřicí stroj
Pohyb rychlým posuvem (G0, RTLION, RTLIOF)
") Funkce Pohyby rychlým posuvem se používají pro následující účely: pro rychlé nastavování polohy nástroje pro pohyby okolo obrobku pro najíždění na body pro výměnu nástroje pro volné vyjíždění nástroje
Funkce Pohyby rychlým posuvem se používají pro následující účely: pro rychlé nastavování polohy nástroje pro pohyby okolo obrobku pro najíždění na body pro výměnu nástroje pro volné vyjíždění nástroje
Manipulátor se třemi stupni volnosti. Martin Laga
 Manipulátor se třemi stupni volnosti Martin Laga Bakalářská práce 2015 ABSTRAKT Cílem této bakalářské práce je návrh a konstrukce laboratorního manipulátoru se třemi stupni volnosti umožňující modelové
Manipulátor se třemi stupni volnosti Martin Laga Bakalářská práce 2015 ABSTRAKT Cílem této bakalářské práce je návrh a konstrukce laboratorního manipulátoru se třemi stupni volnosti umožňující modelové
Univerzita Pardubice Dopravní fakulta Jana Pernera. Robotika a robotizované pracoviště. Ivo Albrecht, DiS
 Univerzita Pardubice Dopravní fakulta Jana Pernera Robotika a robotizované pracoviště, DiS Bakalářská práce 2009 Prohlášení autora Prohlašuji: Tuto práci jsem vypracoval samostatně. Veškeré literární
Univerzita Pardubice Dopravní fakulta Jana Pernera Robotika a robotizované pracoviště, DiS Bakalářská práce 2009 Prohlášení autora Prohlašuji: Tuto práci jsem vypracoval samostatně. Veškeré literární
Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje
 Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje K vykonávání automatických cyklů na stroji nemůsí být nutné instalovat komplexní a tudíž drahý CNC systém. Někdy je možno dosáhnout
Genius 4x Čtyřosý pozicionér pro frézovací, vrtací a vyvrtávací stroje K vykonávání automatických cyklů na stroji nemůsí být nutné instalovat komplexní a tudíž drahý CNC systém. Někdy je možno dosáhnout
A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ _ C N C V Z T A Ž N É A O B R Y S O V É B
 A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ 1 3 1 8 _ C N C V Z T A Ž N É A O B R Y S O V É B O D Y _ P W P Název školy: Číslo a název projektu: Číslo
A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ 1 3 1 8 _ C N C V Z T A Ž N É A O B R Y S O V É B O D Y _ P W P Název školy: Číslo a název projektu: Číslo
CNC soustruhy SF... STANDARDNÍ PŘÍSLUŠENSTVÍ STROJE VOLITELNÉ PŘÍSLUŠENSTVÍ STROJE SF 43 CNC WWW.FERMATMACHINERY.COM
 CNC soustruhy řady SF - s vodorovným ložem Stroje tohoto konstrukčního řešení jsou univerzální modifikovatelné ve 2 (X, Z) i ve 3 (X, Z, C) osách souvisle řízené soustruhy s vodorovným ložem a jsou určeny
CNC soustruhy řady SF - s vodorovným ložem Stroje tohoto konstrukčního řešení jsou univerzální modifikovatelné ve 2 (X, Z) i ve 3 (X, Z, C) osách souvisle řízené soustruhy s vodorovným ložem a jsou určeny
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Procesní automatizační systém PC 8000. Stručné informace
 Procesní automatizační systém Stručné Strana 2 PC systém se skládá z několika modulů Ovládací jednotka průmyslového počítače Více kontrolních jednotek (momentálně vždy 1x PAS a FEED) Síťová část a nepřetržité
Procesní automatizační systém Stručné Strana 2 PC systém se skládá z několika modulů Ovládací jednotka průmyslového počítače Více kontrolních jednotek (momentálně vždy 1x PAS a FEED) Síťová část a nepřetržité
Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]
![Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]](/thumbs/27/11375045.jpg "Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY]") Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY] 1 ÚVOD Úloha 38 popisuje jednu část oblasti sestava programu Solid Edge V20. Tato úloha je v první části zaměřena
Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Aleš Najman [ÚLOHA 38 KONTROLA A POHONY] 1 ÚVOD Úloha 38 popisuje jednu část oblasti sestava programu Solid Edge V20. Tato úloha je v první části zaměřena
Projekt realizovaný na SPŠ Nové Město nad Metují
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Pavel Dostál 1 Vývoj
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Pavel Dostál 1 Vývoj
F - Mechanika tuhého tělesa
 F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
TIA na dosah. Safety funkce - SIMATIC S7-1500F a SINAMICS G120 v TIA Portálu v13. Siemens AG 2014. Alle Rechte vorbehalten. siemens.
 TIA na dosah Safety funkce - SIMATIC S7-1500F a SINAMICS G120 v TIA Portálu v13 siemens.com/answers Přehled SIMATIC a SINAMICS silný tým v TIA-Portálu! Úkoly: Řešení TIA-Portal V13, S7-1500 a Startdrive:
TIA na dosah Safety funkce - SIMATIC S7-1500F a SINAMICS G120 v TIA Portálu v13 siemens.com/answers Přehled SIMATIC a SINAMICS silný tým v TIA-Portálu! Úkoly: Řešení TIA-Portal V13, S7-1500 a Startdrive:
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
M3A ROB: 7. Konstrukce robotů
 ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
EMCO Sinumerik 810 M - frézování
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: EMCO Sinumerik 810 M - frézování Frézování obrysů
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: EMCO Sinumerik 810 M - frézování Frézování obrysů
Obsah 1 Technologie obrábění na CNC obráběcím stroji... 2
 Obsah 1 Technologie obrábění na CNC obráběcím stroji... 2 Souřadnicový systém... 2 Vztažné body... 6 Absolutní odměřování, přírůstkové odměřování... 8 Geometrie nástroje...10 Korekce nástrojů - soustružení...13
Obsah 1 Technologie obrábění na CNC obráběcím stroji... 2 Souřadnicový systém... 2 Vztažné body... 6 Absolutní odměřování, přírůstkové odměřování... 8 Geometrie nástroje...10 Korekce nástrojů - soustružení...13
Výpočet framu na základě 3 změřených bodů v prostoru (MEAFRAME)
") Funkce Příkaz MEAFRAME je rozšířením jazyka systému 840 pro podporu měřicích cyklů. Funkce MEAFREAME vypočítává frame na základě tří ideálních a vzájemně korespondujících změřených bodů. Když je obrobek
Funkce Příkaz MEAFRAME je rozšířením jazyka systému 840 pro podporu měřicích cyklů. Funkce MEAFREAME vypočítává frame na základě tří ideálních a vzájemně korespondujících změřených bodů. Když je obrobek
EPS / VTE. Pracovní verze část 1. Ing. Radomír Mendřický, Ph.D.
 EPS / VTE Pracovní verze část 1 Ing. Radomír Mendřický, Ph.D. Automatizace Trvalým dlouhodobým směrem rozvoje ve všech výrobních odvětvích, a tedy i ve strojírenství, je automatizace výrobního procesu.
EPS / VTE Pracovní verze část 1 Ing. Radomír Mendřický, Ph.D. Automatizace Trvalým dlouhodobým směrem rozvoje ve všech výrobních odvětvích, a tedy i ve strojírenství, je automatizace výrobního procesu.
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
26. Konstrukce robotů Schéma konstrukce robotu
 zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
zapis_roboty_208/2012 MECH Fb 1 z 8 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské #1 + řízení robotu = řídící systém podle #2 zpracovává informace od snímačů a
Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
 Struktura průmyslového RaM (PRaM)") TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Kompatibilita a import CAD
 Kompatibilita a import CAD Import a automatické rozpoznání 3D vlastností CATIA V5 WorkNC nyní nabízí import a automatické rozpoznání vlastností vrtaných otvorů z CATIA V5. V modulu automatického vrtání
Kompatibilita a import CAD Import a automatické rozpoznání 3D vlastností CATIA V5 WorkNC nyní nabízí import a automatické rozpoznání vlastností vrtaných otvorů z CATIA V5. V modulu automatického vrtání
Inteligentní a energeticky úsporný pohon
 Logo spoločnosti - JPG rozlíšenie 200x200 pxl. Názov spoločnosti: Wittmann Battenfeld CZ, spol. s r.o. Komodita:(vypísať slovom) Vstrekovacie lisy a periférne zariadenia Základné informácie o spoločnosti:
Logo spoločnosti - JPG rozlíšenie 200x200 pxl. Názov spoločnosti: Wittmann Battenfeld CZ, spol. s r.o. Komodita:(vypísať slovom) Vstrekovacie lisy a periférne zariadenia Základné informácie o spoločnosti:
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.
![MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.](/thumbs/91/105892726.jpg "MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.") MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
Přednáška pro studenty střední školy SPŠ strojnická a SOŠ profesora Švejcara Plzeň. Aplikace s průmyslovými roboty
 Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň Monitorovací indikátor: 06.43.10
Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň Monitorovací indikátor: 06.43.10
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
2) Nulový bod stroje používáme k: a) Kalibraci stroje b) Výchozímu bodu vztažného systému c) Určení korekcí nástroje
 Nulový bod stroje používáme k: a) Kalibraci stroje b) Výchozímu bodu vztažného systému c) Určení korekcí nástroje") 1) K čemu používáme u CNC obráběcího stroje referenční bod stroje: a) Kalibraci stroje a souřadného systému b) Zavedení souřadného systému stroje c) K výměně nástrojů 2) Nulový bod stroje používáme k:
1) K čemu používáme u CNC obráběcího stroje referenční bod stroje: a) Kalibraci stroje a souřadného systému b) Zavedení souřadného systému stroje c) K výměně nástrojů 2) Nulový bod stroje používáme k:
OCTOPUZ 2.0 Co je nového. Program pro programování a simulaci robotů
 OCTOPUZ 2.0 Co je nového Program pro programování a simulaci robotů Rozšířené uživatelské prostředí Nové uživatelské prostředí Jednoduché přesouvání jednotlivých oken podle vašich představ. Vylepšené schéma
OCTOPUZ 2.0 Co je nového Program pro programování a simulaci robotů Rozšířené uživatelské prostředí Nové uživatelské prostředí Jednoduché přesouvání jednotlivých oken podle vašich představ. Vylepšené schéma
Najíždění na konturu a odjíždění od ní (NORM, KONT, KONTC, KONTT)
") Funkce Předpoklady Syntaxe Prostřednictvím příkazů NORM, KONT, KONTC nebo KONTT je možné při aktivované korekci rádiusu nástroje (G41/G42) přizpůsobit dráhu pro najíždění a odjíždění nástroje na požadovanou
Funkce Předpoklady Syntaxe Prostřednictvím příkazů NORM, KONT, KONTC nebo KONTT je možné při aktivované korekci rádiusu nástroje (G41/G42) přizpůsobit dráhu pro najíždění a odjíždění nástroje na požadovanou
Rotační pohony pro kulové ventily
 s 4 655 Rotační pohony pro kulové ventily pro kulové ventily VA..60.. / VB..60.. AC 24 V / DC 24 V / AC 230 V GSD..41.9A Elektromotorické rotační pohony bez zpětné pružiny Pro On-Off regulaci (2 vodiče
s 4 655 Rotační pohony pro kulové ventily pro kulové ventily VA..60.. / VB..60.. AC 24 V / DC 24 V / AC 230 V GSD..41.9A Elektromotorické rotační pohony bez zpětné pružiny Pro On-Off regulaci (2 vodiče
26. Konstrukce robotů
 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) Výkonná část (svaly) Nosná část (kostra) uživatelské #1 + řízení robotu podle #2 = řídící systém zpracovává informace od snímačů
Průmyslový robot je automatický stroj s využitím ve výrobním procesu. Nahrazuje fyzickou a rutinní práci v technologickém procesu.
 Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
BAKALÁŘSKÁ PRÁCE ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA STROJNÍ
 ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA STROJNÍ Studijní program: B 2301 Strojní inženýrství Studijní zaměření: Stavba výrobních strojů a zařízení BAKALÁŘSKÁ PRÁCE Konstrukční návrh univerzálního programovatelného
ZÁPADOČESKÁ UNIVERZITA V PLZNI FAKULTA STROJNÍ Studijní program: B 2301 Strojní inženýrství Studijní zaměření: Stavba výrobních strojů a zařízení BAKALÁŘSKÁ PRÁCE Konstrukční návrh univerzálního programovatelného
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
LAKOVACÍ ROBOTY - CMA GR650ST
 LAKOVACÍ ROBOTY - CMA GR650ST Antropomorfní robot model GR-650 je elektronicky řízený stroj se 6 osami, který je určen k automatickému lakování práškovými barvami pro povrchovou úpravu dřevěných, kovových
LAKOVACÍ ROBOTY - CMA GR650ST Antropomorfní robot model GR-650 je elektronicky řízený stroj se 6 osami, který je určen k automatickému lakování práškovými barvami pro povrchovou úpravu dřevěných, kovových
Lekce 01 Úvod do algoritmizace
 Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
Kalibrace ROBOTU OBSAH
 Kalibrace ROBOTU OBSAH Nulová poloha SCARA robotu Kontrola přesnosti najíždění Pojmy kalibrace Kalibrace podle kalibračního wizardu Přesná kalibrace bez kalibračního wizardu Kalibrační bod Rekapitulace
Kalibrace ROBOTU OBSAH Nulová poloha SCARA robotu Kontrola přesnosti najíždění Pojmy kalibrace Kalibrace podle kalibračního wizardu Přesná kalibrace bez kalibračního wizardu Kalibrační bod Rekapitulace
Evolventní interpolace (INVCW, INVCCW)
") Funkce Evolventa kruhu je křivka, která je popsána koncovým bodem pevného napnutého vlákna odvíjejícího se z kružnice. Evolventní interpolace umožňuje dráhové křivky podél evolventy. Pohyb se uskutečňuje
Funkce Evolventa kruhu je křivka, která je popsána koncovým bodem pevného napnutého vlákna odvíjejícího se z kružnice. Evolventní interpolace umožňuje dráhové křivky podél evolventy. Pohyb se uskutečňuje
Motion Control se SIMATIC & SINAMICS Otáčkové & Polohovací osy
 TIA na dosah Červen 2015 Motion Control se SIMATIC & Otáčkové & Polohovací osy siemens.com/answers Motion Control se SIMATIC & Motion Control aplikace Complexity In future: T (EPos, DCC) Rychlost Polohování
TIA na dosah Červen 2015 Motion Control se SIMATIC & Otáčkové & Polohovací osy siemens.com/answers Motion Control se SIMATIC & Motion Control aplikace Complexity In future: T (EPos, DCC) Rychlost Polohování
Hydraulika ve strojírenství
 Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
Příloha č. 2 Technická specifikace
 Příloha č. 2 Technická specifikace Název veřejné zakázky: MoVI-FAI Malé robotické pracoviště IDENTIFIKAČNÍ ÚDAJE ZADAVATELE Obchodní název: Sídlo Univerzita Tomáše Bati ve Zlíně nám. T. G. Masaryka 5555,
Příloha č. 2 Technická specifikace Název veřejné zakázky: MoVI-FAI Malé robotické pracoviště IDENTIFIKAČNÍ ÚDAJE ZADAVATELE Obchodní název: Sídlo Univerzita Tomáše Bati ve Zlíně nám. T. G. Masaryka 5555,
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK
 ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
11 Manipulace s drobnými objekty
 11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
11 Manipulace s drobnými objekty Zpracování rozměrově malých drobných objektů je zpravidla spojeno s manipulací s velkým počtem objektů, které jsou volně shromažďovány na různém stupni uspořádanosti souboru.
SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV.
 SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV Ondřej Bublík ABSTRAKT Tato práce se zabývá návrhem, simulací a konstrukčním
SOUTĚŽNÍ PŘEHLÍDKA STUDENTSKÝCH PRACÍ FST 2007 KONSTRUKČNÍ ŘEŠENÍ KINEMATIKY VÝMĚNÍKU NÁSTROJŮ PRO VERTIKÁLNÍ OBRÁBĚCÍ CENTRO ŘADY MCV Ondřej Bublík ABSTRAKT Tato práce se zabývá návrhem, simulací a konstrukčním
AUTOMATIZACE A ROBOTIZACE I. Učební text pro žáky 3. ročníku oboru 23-41-M/001 Strojírenství
 AUTOMATIZACE A ROBOTIZACE I. Učební text pro žáky 3. ročníku oboru 23-41-M/001 Strojírenství 1 3 Průmyslové roboty Širokému publiku představil slovo robot Karel Čapek ve své divadelním dramatu R.U.R. (Rossumovi
AUTOMATIZACE A ROBOTIZACE I. Učební text pro žáky 3. ročníku oboru 23-41-M/001 Strojírenství 1 3 Průmyslové roboty Širokému publiku představil slovo robot Karel Čapek ve své divadelním dramatu R.U.R. (Rossumovi
A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ 1 3 1 9 _ C N C P R O G R A M O V Á N Í _ P W P
 A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ 1 3 1 9 _ C N C P R O G R A M O V Á N Í _ P W P Název školy: Číslo a název projektu: Číslo a název šablony
A U T O R : I N G. J A N N O Ž I Č K A S O Š A S O U Č E S K Á L Í P A V Y _ 3 2 _ I N O V A C E _ 1 3 1 9 _ C N C P R O G R A M O V Á N Í _ P W P Název školy: Číslo a název projektu: Číslo a název šablony
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
2. TECHNICKÉ A PROGRAMOVÉ VYBAVENÍ SYSTÉMU
 Obsah 1. ÚVOD... 1-1 2. TECHNICKÉ A PROGRAMOVÉ VYBAVENÍ SYSTÉMU CNC8x9... 2-1 2.1. Výběr z technických parametrů... 2-1 2.2. Sestava systému CNC8x9 DUAL... 2-3 3. ZÁKLADNÍ INSTRUKCE JAZYKA PLC836... 3-1
Obsah 1. ÚVOD... 1-1 2. TECHNICKÉ A PROGRAMOVÉ VYBAVENÍ SYSTÉMU CNC8x9... 2-1 2.1. Výběr z technických parametrů... 2-1 2.2. Sestava systému CNC8x9 DUAL... 2-3 3. ZÁKLADNÍ INSTRUKCE JAZYKA PLC836... 3-1
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Výroba oděvů (ODE) Ing. Katarína Zelová, Ph.D. 12. přednáška: Mezioperační doprava a organizace výroby
 Ing. Katarína Zelová, Ph.D. 12. přednáška: Mezioperační doprava a organizace výroby") (ODE) Ing. Katarína Zelová, Ph.D. 12. přednáška: Mezioperační doprava a organizace výroby Doprava a manipulace s materiálem zajišťuje vhodný materiálový tok mezi jednotlivými pracovními místy překonání
(ODE) Ing. Katarína Zelová, Ph.D. 12. přednáška: Mezioperační doprava a organizace výroby Doprava a manipulace s materiálem zajišťuje vhodný materiálový tok mezi jednotlivými pracovními místy překonání
Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ CVIČENÍ SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 STROJÍRENSTVÍ
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ CVIČENÍ SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 STROJÍRENSTVÍ
Nápravy motorových vozidel
 Nápravy motorových vozidel Rozdělení náprav podle funkce : řídící ( rejdové ) -nebo- pevné ( neřízené ) poháněné (hnací i nosné) -nebo- nepoháněné (pouze nosné) Co tvoří pojezdové ústrojí? Kolová vozidla
Nápravy motorových vozidel Rozdělení náprav podle funkce : řídící ( rejdové ) -nebo- pevné ( neřízené ) poháněné (hnací i nosné) -nebo- nepoháněné (pouze nosné) Co tvoří pojezdové ústrojí? Kolová vozidla
Manuál k obsluze simulátoru KKK ELO 2011 pro studenty, popis laboratorní úlohy
 Manuál k obsluze simulátoru KKK ELO 2011 pro studenty, popis laboratorní úlohy 1. Koncepce simulátoru a řídicího systému Uspřádání testovacího zařízení je navrženo tak, aby bylo možné nezávisle ovládat
Manuál k obsluze simulátoru KKK ELO 2011 pro studenty, popis laboratorní úlohy 1. Koncepce simulátoru a řídicího systému Uspřádání testovacího zařízení je navrženo tak, aby bylo možné nezávisle ovládat
Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ CVIČENÍ SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 STROJÍRENSTVÍ
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Pavel Steininger PROGRAMOVÁNÍ NC STROJŮ CVIČENÍ SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 STROJÍRENSTVÍ
Další plochy technické praxe
 Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC
 KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC CNC CAM HSMWorks Přehled modulů Kapitola 1 - seznámení s prostředím HSM Works Kapitola 2 - import modelů, polohování Kapitola 3 - základy soustružení
KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC CNC CAM HSMWorks Přehled modulů Kapitola 1 - seznámení s prostředím HSM Works Kapitola 2 - import modelů, polohování Kapitola 3 - základy soustružení
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč
 PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
PROGRAMOVÁNÍ ROBOTŮ V PROSTŘEDÍ TIA PORTAL Josef Kváč www.siemens.com Trendy v mechanickém návrhu 24 V/48 V DC technologie s větším výkonem Lineární motory a inteligentní dopravníky Vše elektrické bez
ZÁKLADY ROBOTIKY Zajímavosti z průmyslové robotiky Příklady návrhu robotické buňky
 ZÁKLADY ROBOTIKY Zajímavosti z průmyslové iky Příklady návrhu ické buňky Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál
ZÁKLADY ROBOTIKY Zajímavosti z průmyslové iky Příklady návrhu ické buňky Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál
HLC série. horizontální soustruhy
 HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
26. Konstrukce robotů
 oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
oboty 15 1 z 7 26. Konstrukce robotů Schéma konstrukce robotu Řídící část (mozek a smysly) uživatelské rozhraní + řízení robotu podle programu = řídící systém zpracovává informace od snímačů a vydává příkazy
CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL
 Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
Servomechanická jednotka pro zdvih a otáčení SH 75. Technika, která Vás nadchne
 Servomechanická jednotka pro zdvih a otáčení SH 75 Technika, která Vás nadchne Technika, která Vás nadchne Rychle, pružně, výhodně a ještě mnohem víc! Pomocí jednoduché obsluhy / rychlého uvádění do provozu
Servomechanická jednotka pro zdvih a otáčení SH 75 Technika, která Vás nadchne Technika, která Vás nadchne Rychle, pružně, výhodně a ještě mnohem víc! Pomocí jednoduché obsluhy / rychlého uvádění do provozu
Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491
 Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491 Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Kód DUMu Název DUMu Autor DUMu Studijní obor Ročník Předmět Anotace CZ.1.07/1.5.00/34.0560
Škola VOŠ a SPŠE Plzeň, IČO 49774301, REDIZO 600009491 Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast Kód DUMu Název DUMu Autor DUMu Studijní obor Ročník Předmět Anotace CZ.1.07/1.5.00/34.0560
Posuv s korekcí ručním kolečkem (FD, FDA)
") Funkce Pomocí příkazů FD a FDA je možné osami v průběhu zpracovávání výrobního programu pohybovat ručními kolečky. Naprogramované pracovní posuvové pohyby os jsou přitom superponovány s impulzy ručního
Funkce Pomocí příkazů FD a FDA je možné osami v průběhu zpracovávání výrobního programu pohybovat ručními kolečky. Naprogramované pracovní posuvové pohyby os jsou přitom superponovány s impulzy ručního