Mechanismy. Vazby členů v mechanismech (v rovině):
|
|
|
- Libuše Machová
- před 9 lety
- Počet zobrazení:
Transkript
1 Mechanismy Mechanismus klikový, čtyřkloubový, kulisový, západkový a vačkový jsou nejčastějšími mechanismy ve strojích (kromě převodů). Mechanismy obsahují členy (kliky, ojnice, těhlice, křižáky a další). Členy jsou spojovány vazbami a tvoří soustavu těles a vazeb. Základní rám, který je pevný v prostoru, je členem soustavy s číslem 1. Mechanismy se znázorňují jednoduchými schématy. Vazby členů v mechanismech (v rovině): rotační dvojice r posuvná dvojice p valivá dvojice v obecná dvojice o Těleso v rovině má 3 stupně volnosti (může se pohybovat ve 2 směrech posuvně a rotovat kolem 1 osy rotace). V prostoru jsou vazby složitější (těleso má 6 stupňů volnosti). Počet členů mechanismu je n. Vazby v rovině tělesu odeberou každá 2 stupně volnosti (obecná dvojice jen 1). Těleso v rovinné soustavě n těles, které je vázané vazbami, má počet stupňů volnosti SV (a stejně tak mechanismus) : SV = 3. ( n 1) 2. ( r + p + v ) -- o Mechanismus (tj. každé těleso v soustavě tvořící mechanismus) má obvykle 1 stupeň volnosti. Zvláštní mechanismus se 2 stupni volnosti se nazývá diferenciál a slouží k vyrovnání sil nebo dráhy některých členů mechanismu.
: rotační dvojice r posuvná dvojice p valivá dvojice v obecná dvojice o Těleso v rovině má 3 stupně volnosti (může se pohybovat ve 2 směrech posuvně a rotovat")
2 Mechanismus v rovině a v prostoru V prostoru má každé těleso 6 stupňů volnosti (SV, 3 posuvy, 3 rotace). Vazby v prostoru mají složitější charakter např. vazba rotace musí zahrnout i zabránění posuvu ve směru rotace aj. Častá vazba kulovým čepem s kulovou pánví odečte 3 stupně volnosti (znemožní posuvy). V prostoru je SV = 6. ( n 1 ) 5. r 3. k Jako příklad lze uvést čtyřkloubový mechanismus. V rovině je ( n=4, r=4 ) a v prostoru ( n=4, r=2, k =2 ): v rovině v prostoru (k je vazba koulí) SV = 3. ( 4 1 ) 2. 4 = 1 SV = 6. ( 4 1 ) = 2 V prostoru se navíc může člen 3 otáčet kolem své osy - proto soustava má SV = 2. Prostorová (statická) neurčitost znamená vznik vnitřních deformací a pnutí a bývá častou příčinou poruch. Analýza statické neurčitosti mechanismů v prostoru má tedy zásadní význam a je nutná!
 neurčitost znamená vznik vnitřních deformací a pnutí a bývá častou příčinou poruch.")
3 Jednoduchý mechanismus (čtyřkloubový mechanismus) v rovině a v prostoru a vazby v prostoru VAZBY v rovině čtyřkloubový mechanismus v prostoru

4 Rozklad pohybu Pohyb tělesa členu mechanismu lze rozložit na pohyb základní (unášivý pohyb, např. pohyb určitého bodu tělesa vůči pevnému rámu) a další pohyb relativní (vzájemný, přídavný, tj. pohyb, který konají body tělesa vůči bodu konajícímu základní pohyb). Pohyby jsou označovány pomocí bodů a členů mechanismu, např. pohyb bodu A na členu 3 může být rozložen na relativní pohyb bodu A vůči bodu B na členu 3 (tento bod koná však také základní pohyb s členem 2, se kterým je spojen ve vazbě) a základní pohyb bodu B vůči rámu. Zápis pohybu má formu A: 31 = a stejně se řeší rychlosti a zrychlení. Každý člen (těleso) má také pro každý pohyb pól pohybu. Pól pohybu je střed rotace tělesa, kdy tato rotace znamená pouze velmi malý rotační pohyb (s téměř nulovým úhlem pootočení). Pól pohybu se obvykle najde jako průsečík normál k pohybu některých bodů tělesa. Řešením pohybů těles a jejich bodů v rovině nebo prostoru se zabývá kinematika. Speciální oblastí kinematiky je kinematická geometrie. Nalezneme zde např. vysvětlení vzniku některých křivek, jejich vlastností (elipsa, evolventa, cykloida aj.). Z požadavků na výsledný pohyb lze vytvořit návrh mechanismu, splňujícího zadání (např. často používáno pro vačkový mechanismus).
 má také pro každý pohyb pól pohybu.")
5 Některé často používané mechanismy: Ve strojích bývá pohon odvozen od motoru s rotačním pohybem. Součástí strojů jsou pak převody, kterými se předávaný pohyb upraví (transformuje M k a n). Vlastní výkonná část stroje, orgán, mívá pohyb složitější, odvozený od rotace vstupního členu do obecného rovinného případně prostorového pohybu výstupního členu některým mechanismem (smykadlo lisu, orgán hnětacího stroje apod.). Převody tvoří velkou skupinu mechanismů, obvykle vedenou samostatně mimo mechanismy. Často používané mechanismy: čtyřkloubový mechanismus klikový mechanismus (včetně mech. s excentrem) kolenový mechanismus kulisový mechanismus vačkové mechanismy krokové mechanismy V mnoha strojích je výstupní pohyb rotační a stroj má motor doplněn převodovým mechanismem se stálým nebo proměnným převodem. Výstupním členem je např. vřeteno obráběcího stroje, kolo podvozku vozidla, naviják výtahu či jeřábu, vrtule míchadla, letadla apod.

6 Čtyřkloubový mechanismus počet členů (včetně rámu) n = pro rovinnou teorii 4 rotační vazby r = 4 pro prostorové řešení 2 vazby rotační r = 2 a 2 vazby kulovými čepy k = 2 V bodech O 1 a O 2 jsou rotační vazby umožňující jen otočení podle osy a žádný posuv (odebírají tedy po 5 stupních volnosti). V bodech A a B jsou vazby kulovými čepy (odebírají po 3 stupních volnosti, tj. zamezí všem posuvům, umožní rotace podle 3 os). V prostoru má řešení 2 stupně volnosti (možná je také rotace členu 3 podle jeho osy). Provedení se 4 rotačními vazbami v prostoru by znamenalo statickou neurčitost! Otáčející se členy 2 a 4 jsou nazývány kliky, je spojující člen 3 je označován těhlice. Okamžitý pól pohybu členu 3 vůči rámu 1 je dán průsečíkem normál pohybů bodů A a B (rotační pohyby). Člen 3 se tedy v nakreslené situaci pohybuje otáčením podle pólu (otáčení o úhel blížící se 0). Tento pohyb může být využit pro kinematické řešení.

7 Okamžitým pólem pohybu P 31 členu 3 vůči rámu 1 je průsečík přímek O 1 A a O 2 B. Tyto přímky jsou normálami pro pohyb 31 bodu A a bodu B na členu (tělese) 3. Pro řešení rychlostí bodů tělesa 3 platí, že okamžitá úhlová rychlost ω pro otáčení kolem pólu je pro všechny body tělesa stejná. Protože je dána např. rychlost otáčení kliky 2, na které je i bod A, bude úhlová rychlost bodu A výchozí pro rychlosti dalších bodů tělesa 3. Rychlost bodu A vůči rámu je v A = r. ω, kde ω je rychlost otáčení kliky 2 kolem bodu O 1. Pro otáčení vůči pólu P 31 je úhlová rychlost bodu A dána v A / AP 31. Stejná je i úhlová rychlost otáčení všech bodů tělesa 3 vůči pólu P 31. Zvláštním případem čtyřkloubového mechanismu je paralelogram (má tvar rovnoběžníku). Paralelogram v kopírovacím zařízení kopie v měřítku

8 Paralelogram Čtyřkloubový mechanismus se shodnou délkou klik O 1 A = O 2 B a délkou těhlice shodnou se vzdáleností středů otáčení klik O 1 O 2 = AB. Používá se např. v různých zdvihadlech aj. Všechny body těhlice konají stejný pohyb s posunutou dráhou. Parametry tohoto pohybu jsou dány pohybem bodů A a B. A těhlice B klika 1 klika 2 základní rám O 1 O 2 Mechanismus dává rovnoběžnou polohu spojnice AB s rámem (spojnice O 1 O 2 ) za pohybu v každé poloze. Využívá se v mechanismech kopírovacích zařízení obráběcích strojů (včetně možnosti zvětšení či zmenšení vytvářeného objektu oproti šabloně).
 za pohybu v každé poloze.")
9 Kopírovací mechanismus - schéma AB = CO = a AC = BO = b společný otočný bod O DF = OE = c EF = OD = d Poměry: d a c = znamenají zvětšení Body A a F opisují podobné útvary. b

10 Klikový mechanismus má počet členů n=4 a v rovině 3 rotační vazby r=3 a jednu vazbu posuvnou p= Klikový mechanismus je používán ve spalovacích motorech vozidel a dalších strojů, je dnes nejrozšířenějším mechanismem. V alternativním provedení pracuje v pístových kompresorech, pístových čerpadlech, lisech a dalších strojích, např. pro manipulaci s výrobky aj. Souhrnně označujeme některé tyto stroje jako pístové stroje (spal. motory, kompresory, čerpadla) na rozdíl od strojů tzv. rotačních lopatkových.

11 Členy klikového mechanismu se označují: 2 klika, 3 ojnice, 4 křižák (v jednoduché verzi píst). Klikový mechanismu bývá obvykle symetrický (tzv. centrický). Necentrický např. některé upínací zařízení pro obrábění. Dvoučinné stroje mají pístnici (tlak média působí na obě strany pístu). úhel β svírá ojnice s osou platí r. sin α = L. sin β L je délka ojnice, r délka kliky dráha pístu z horní úvrati x = r. ( 1 cos α ) + L. ( 1 cos β ) pro ω = dα / dt = konst. je rychlost pístu v Jednočinný stroj poměr r / L = 0,2 až 0,33 v = r. [ sin α + sin 2α / ( 2. L. cos β )]. ω zrychlení pístu a a r. ( cos α + 1 / L. cos 2α ). ω 2 α Vyvažování klikového mechanismu Dvojčinný stroj 4 3 β zrychlení a 2 píst křižák pístnice protizávaží
]. ω zrychlení pístu a a r. ( cos α + 1 / L. cos 2α ).")
12 klikový mechanismus píst zvláštní provedení klik. mechanismu necentrický klik. mech. hvězdicový letecký motor provedení V motor protiběžné písty aj. klika s písty a ojnicemi Podle zatížení pístu tlakem média jednočinný nebo dvojčinný. Použití klikového mechanismu pístová čerpadla jedno- a dvojčinná pístové kompresory spalovací motory pístové vznětové spalovací motory pístové zážehové klikové lisy rámové pily podavače aj.

13 Kolenový a výstředníkový mechanismus Tyto mechanismy přestavují úpravy klikového mechanismu pro získání některých změněných parametrů. Kolenový mechanismus vyvine velmi vysokou sílu např. pro lisy na ražbu mincí. Výstředníkový mechanismus dává čistě harmonický pohyb a malé rozměry. Stejně jako kolenový mechanismus se opět používá pro vyvození velké síly při malém zdvihu (např. u výstředníkových lisů pro vystřihování z plechů). výstředník = excentr pohyb smykadla má charakter harmonického pohybu zdvih h je dán funkcí h(α) = e. sin α α je úhel otočení excentru, který má excentricitu e mechanismus s excentrem Excentricita e je vzdálenost středu otáčení od středu zaoblení, celkový zdvih je 2. e je to vlastně klikový mechanismus s nekonečně dlouhou ojnicí
 = e.")
14 Mechanismus kolenového lisu je složen z klikového mechanismu a přidaných členů (další klika a ojnice). Pohánějící klika Skládá se z čtyřkloubového mechanismu (na obr. členy 1, 2, 4) a z přidaných členů ojnice (3) a smykadla vedeného posuvně. Mechanismus s excentrem se používá pro lisy, upínače apod. Pracuje s malým zdvihem a velkou silou (rychlý nárůst). mechanismus s excentrem kolenový mechanismus drtiče Členy 1, 2 a 4 tvoří čtyřkloubový mechanismus posuvné vedení 2 1 střed otáčení excentru excentr Kolenový mechanismus se používá u lisů s malým zdvihem a velkou lisovací silou, podobně u drtičů aj. Maximální síla je vyvíjena v tzv. mrtvé poloze (členy 3 a 4 jsou v přímce). Malé překročení mrtvé polohy je využíváno u uzamykacích mechanismů (ve spojení s malou deformací).
.")
15 výstředníkový lis klikový nebo kolenový lis pro akumulaci energie vyrovnání chodu je použit setrvačník

16 Kulisový mechanismus Kulisový mechanismus je opět používán pro získání přímočarého zpětného (cyklického) pohybu, obvykle u obrážeček. Pohyb v jednom směru je totiž rychlejší než pohyb opačným směrem. výkyvná kulisa vpřed zpět 2 klika 3 smykadlo kul. 4 kulisa 5 ojnice 6 smykadlo obr. 4 průběh rychlosti v závislosti na zdvihu Kývání kulisy bývá převáděno na přímočarý pohyb dalšími členy a vazbami (2 rotace a posuv, 2 členy).

17 Nastavení velikosti zdvihu otočná kulisa O 2 O 1 Mechanismus pohonu smykadla svislé obrážečky Zpětný pohyb se koná větší rychlostí než pracovní (řezný) pohyb klika 3 smykadlo kulisy 4 otočná kulisa 5 ojnice 6 smykadlo obrážečky rychlost pracovní chod Průběh rychlosti v závislosti na zdvihu zdvih zpětný chod

18 Kulisový mechanismus u obrážeček vodorovná (kývavá kulisa) svislá (otočná kulisa) Pokud leží bod O 1 vně kružnice se středem v bodě O 2 a o poloměru r kulisa se kýve, pokud leží bod O 1 uvnitř této kružnice, kulisa se otáčí. Obrážečka svislá Obrážečka vodorovná

19 Vačkové mechanismy Vačkové mechanismy podle směru pohybu zvedátka: radiální (okrouhlé) axiální (bubnové) Vačkový mechanismus dovoluje přeměnit rotační pohyb vačky na vratný posuvný nebo rotační pohyb zvedátka s libovolným časovým průběhem funkce zdvihu, rychlosti nebo zrychlení. bubnová vačka rozvinutí pláště válce povrchu vačky Na rozvinutí je vytvořena křivka dávající zdvihovou závislost posunutí na úhlu otočení vačky.

20 vačky a zvedátka
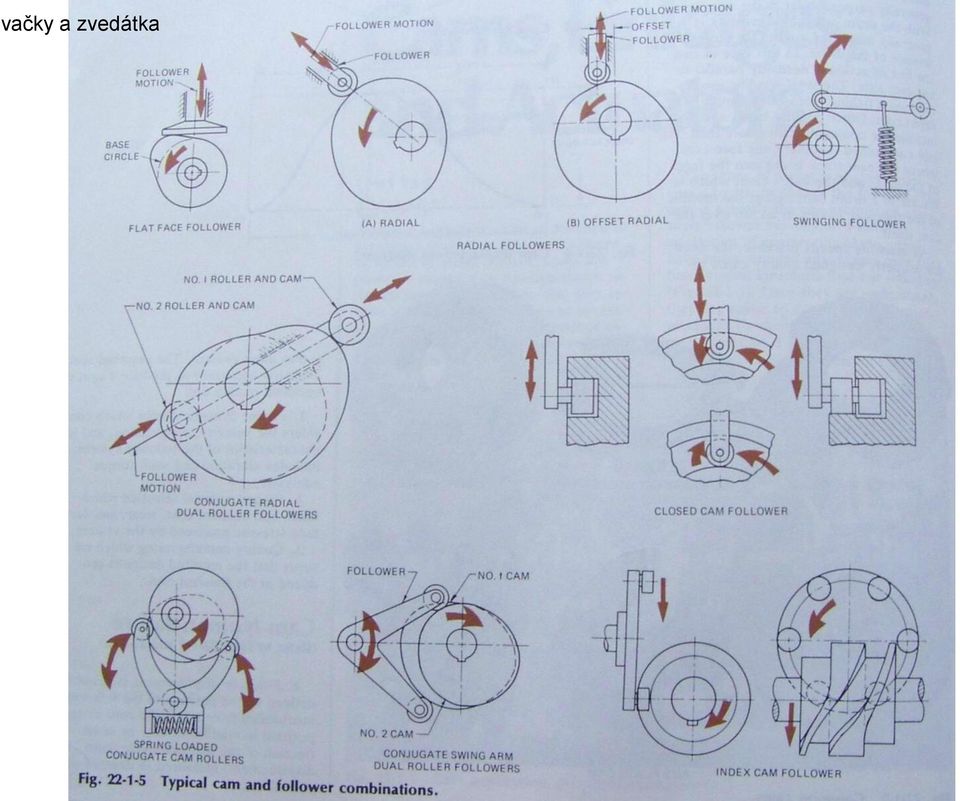
21 Posuvná zvedátka plochá zaoblená s kladičkou Různá provedení vaček Otočná zvedátka otočné zvedátko posuvné zvedátko
22 vačky se otáčejí a posouvají nebo otáčejí zvedátka zvedátka jsou plochá, oblá nebo s kladkou Vačky a zvedátka zvedátka převádějící pohyb na přímočarý vratný nebo rotační kývavý
23 Krokovací mechanismy Nejčastější pouze mechanické typy: rohatka a západka nebo vačkový mechanismus maltézský mechanismus hodinový stroj Pro přerušovaný pohyb je často používáno řešení elektrické, např. pomocí generátoru pulsů aj. rohatka a západka krokovací mechanismus se 2 západkami
24 Krokovací mechanismus se dvěma západkami Západka koná rovinný pohyb jako těhlice čtyřkloubového mechanismu západka západka rohatka
25 Maltézský mechanismus se 4 drážkami (90 )
26 Maltézský mechanismus se 6 drážkami (60 )
27 hodinový stroj s kyvadlem tah závaží
Předmět: Ročník: Vytvořil: Datum: ŠČERBOVÁ M. PAVELKA V. NOSNÍKY NOSNÍKY
 Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 16. ČERVNA 2012 Název zpracovaného celku: NOSNÍKY NOSNÍKY Nosníky jsou zpravidla přímá tělesa (pruty) uloţená na podporách nebo
Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 16. ČERVNA 2012 Název zpracovaného celku: NOSNÍKY NOSNÍKY Nosníky jsou zpravidla přímá tělesa (pruty) uloţená na podporách nebo
Kótování na strojnických výkresech 1.část
 Kótování na strojnických výkresech 1.část Pro čtení výkresů, tj. určení rozměrů nebo polohy předmětu, jsou rozhodující kóty. Z tohoto důvodu je kótování jedna z nejzodpovědnějších prací na technických
Kótování na strojnických výkresech 1.část Pro čtení výkresů, tj. určení rozměrů nebo polohy předmětu, jsou rozhodující kóty. Z tohoto důvodu je kótování jedna z nejzodpovědnějších prací na technických
c sin Příklad 2 : v trojúhelníku ABC platí : a = 11,6 dm, c = 9 dm, α = 65 0 30. Vypočtěte stranu b a zbývající úhly.
 9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
1.7. Mechanické kmitání
 1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
Výroba ozubených kol. Použití ozubených kol. Převody ozubenými koly a tvary ozubených kol
 Výroba ozubených kol Použití ozubených kol Ozubenými koly se přenášejí otáčivé pohyby a kroutící momenty. Přenos je zde nucený, protože zuby a zubní mezery do sebe zabírají. Kola mohou mít vnější nebo
Výroba ozubených kol Použití ozubených kol Ozubenými koly se přenášejí otáčivé pohyby a kroutící momenty. Přenos je zde nucený, protože zuby a zubní mezery do sebe zabírají. Kola mohou mít vnější nebo
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Nevyváženost rotorů rotačních strojů je důsledkem změny polohy (posunutí, naklonění) hlavních os setrvačnosti rotorů vzhledem
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Nevyváženost rotorů rotačních strojů je důsledkem změny polohy (posunutí, naklonění) hlavních os setrvačnosti rotorů vzhledem
Výroba ozubených kol
 Výroba ozubených kol obrábění tvarových (evolventních) ploch vícebřitým nástrojem patří k nejnáročnějším odvětvím strojírenské výroby speciální stroje, přesné nástroje Ozubená kola součásti pohybových
Výroba ozubených kol obrábění tvarových (evolventních) ploch vícebřitým nástrojem patří k nejnáročnějším odvětvím strojírenské výroby speciální stroje, přesné nástroje Ozubená kola součásti pohybových
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.3 HŘÍDELOVÉ SPOJKY Spojky jsou strojní části, kterými je spojen hřídel hnacího ústrojí s hřídelem ústrojí
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.3 HŘÍDELOVÉ SPOJKY Spojky jsou strojní části, kterými je spojen hřídel hnacího ústrojí s hřídelem ústrojí
ROZDĚLENÍ ČERPADEL (viz Osnova: HS-00 /kap.1.1) Hydrodynamická čerpadla. Hydrostatická čerpadla
 Hydrodynamická čerpadla. Hydrostatická čerpadla") ROZDĚLENÍ ČERPADEL (viz Osnova: HS-00 /kap.1.1) Hydrodynamická čerpadla odstředivá axiální obvodová labyrintová kombinovaná radiální diagonální Hydrostatická čerpadla rotační s kmitavým pohybem peristaltická
ROZDĚLENÍ ČERPADEL (viz Osnova: HS-00 /kap.1.1) Hydrodynamická čerpadla odstředivá axiální obvodová labyrintová kombinovaná radiální diagonální Hydrostatická čerpadla rotační s kmitavým pohybem peristaltická
Název školy. Moravské gymnázium Brno s.r.o. Mgr. Marie Chadimová Mgr. Věra Jeřábková. Autor. Matematika. Planimetrie. Trojúhelníky. Teorie a příklady.
 Číslo projektu Z.1.07/1.5.00/34.0743 Název školy Moravské gymnázium rno s.r.o. utor Tematická oblast Mgr. Marie hadimová Mgr. Věra Jeřábková Matematika. Planimetrie. Trojúhelníky. Teorie a příklady. Ročník
Číslo projektu Z.1.07/1.5.00/34.0743 Název školy Moravské gymnázium rno s.r.o. utor Tematická oblast Mgr. Marie hadimová Mgr. Věra Jeřábková Matematika. Planimetrie. Trojúhelníky. Teorie a příklady. Ročník
Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X se nazývá obraz.
 7. Shodná zobrazení 6. ročník 7. Shodná zobrazení 7.1. Shodnost geometrických obrazců Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor,
7. Shodná zobrazení 6. ročník 7. Shodná zobrazení 7.1. Shodnost geometrických obrazců Zobrazení v rovině je předpis, který každému bodu X roviny připisuje právě jeden bod X roviny. Bod X se nazývá vzor,
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi
 6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací.
 jako náprava hnací.") 1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
Mezní kalibry. Druhy kalibrů podle přesnosti: - dílenské kalibry - používají ve výrobě, - porovnávací kalibry - pro kontrolu dílenských kalibrů.
 Mezní kalibry Mezními kalibry zjistíme, zda je rozměr součástky v povolených mezích, tj. v toleranci. Mají dobrou a zmetkovou stranu. Zmetková strana je označená červenou barvou. Délka zmetkové části je
Mezní kalibry Mezními kalibry zjistíme, zda je rozměr součástky v povolených mezích, tj. v toleranci. Mají dobrou a zmetkovou stranu. Zmetková strana je označená červenou barvou. Délka zmetkové části je
Název laboratorní úlohy: Popis úlohy: Fotografie úlohy:
 Míč na rotujícím válci Tato úloha představuje složitý mechatronický nelineární systém, který se řídí pomocí experimentálně navrženého regulátor. Cílem je udržet míč ve vertikální poloze, čehož je dosaženo
Míč na rotujícím válci Tato úloha představuje složitý mechatronický nelineární systém, který se řídí pomocí experimentálně navrženého regulátor. Cílem je udržet míč ve vertikální poloze, čehož je dosaženo
4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů
, tvorba složených objektů") 4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů Příklad 1: Pracujte v pohledu Shora. Sestrojte kružnici se středem [0,0,0], poloměrem 10 a kružnici
4. cvičení: Pole kruhové, rovinné, Tělesa editace těles (sjednocení, rozdíl, ), tvorba složených objektů Příklad 1: Pracujte v pohledu Shora. Sestrojte kružnici se středem [0,0,0], poloměrem 10 a kružnici
AKČNÍ ČLENY POHONY. Elektrické motory Základní vlastností elektrického motoru jsou určeny:
 AKČNÍ ČLENY Prostřednictvím akčních členů působí regulátor přímo na regulovanou soustavu. Akční členy nastavují velikost akční veličiny tj. realizují vstup do regulované soustavy. Akční veličina může mít
AKČNÍ ČLENY Prostřednictvím akčních členů působí regulátor přímo na regulovanou soustavu. Akční členy nastavují velikost akční veličiny tj. realizují vstup do regulované soustavy. Akční veličina může mít
Uložení potrubí. Postupy pro navrhování, provoz, kontrolu a údržbu. Volba a hodnocení rezervy posuvu podpěr potrubí
 Uložení potrubí Postupy pro navrhování, provoz, kontrolu a údržbu Volba a hodnocení rezervy posuvu podpěr potrubí Obsah: 1. Definice... 2 2. Rozměrový návrh komponent... 2 3. Podpěra nebo vedení na souosém
Uložení potrubí Postupy pro navrhování, provoz, kontrolu a údržbu Volba a hodnocení rezervy posuvu podpěr potrubí Obsah: 1. Definice... 2 2. Rozměrový návrh komponent... 2 3. Podpěra nebo vedení na souosém
1 KLOUBOVÉ HŘÍDELE. Přenos točivého momentu u automobilu s klasickou koncepcí a výkyvnou zadní hnací nápravou
 1 KLOUBOVÉ HŘÍDELE ÚČEL přenášet točivý moment, umožnit vzájemnou výchylku os (klouby), vyrovnat axiální posuv (posuvný člen), tlumení vibrací (pružné klouby). Točivý moment je přenášen z převodovky do
1 KLOUBOVÉ HŘÍDELE ÚČEL přenášet točivý moment, umožnit vzájemnou výchylku os (klouby), vyrovnat axiální posuv (posuvný člen), tlumení vibrací (pružné klouby). Točivý moment je přenášen z převodovky do
Průniky rotačních ploch
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Průniky rotačních ploch Vypracoval: Vojtěch Trnka Třída: 8. M Školní rok: 2012/2013 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Průniky rotačních ploch Vypracoval: Vojtěch Trnka Třída: 8. M Školní rok: 2012/2013 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
1.1 PÍSTOVÁ ČERPADLA Podle způsobu práce rozdělujeme pístová čerpadla na : jednočinná, dvojčinná, diferenciální, zdvižná.
 1 OBJEMOVÁ ČERPADLA Nasávání se střídá s výtlakem čerpadlo nasaje určitý objem kapaliny, uzavře jej v pracovním prostoru a v dalším pracovním údobí jej vytlačuje. Mechanická energie dodávaná motorem se
1 OBJEMOVÁ ČERPADLA Nasávání se střídá s výtlakem čerpadlo nasaje určitý objem kapaliny, uzavře jej v pracovním prostoru a v dalším pracovním údobí jej vytlačuje. Mechanická energie dodávaná motorem se
Fakulta strojního inženýrství VUT v Brně Ústav konstruování. KONSTRUOVÁNÍ STROJŮ mechanismy. Přednáška 8
 Fakulta strojního inženýrství VUT v Brně Ústav konstruování KONSTRUOVÁNÍ STROJŮ mechanismy Přednáška 8 Převody s korigovanými ozubenými koly Obsah Převody s korigovanými ozubenými koly Výroba ozubení odvalováním
Fakulta strojního inženýrství VUT v Brně Ústav konstruování KONSTRUOVÁNÍ STROJŮ mechanismy Přednáška 8 Převody s korigovanými ozubenými koly Obsah Převody s korigovanými ozubenými koly Výroba ozubení odvalováním
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.2.3. Valivá ložiska Ložiska slouží k otočnému nebo posuvnému uložení strojních součástí a k přenosu působících
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.2.3. Valivá ložiska Ložiska slouží k otočnému nebo posuvnému uložení strojních součástí a k přenosu působících
3.1.4 Trojúhelník. Předpoklady: 3103. Každé tři různé body neležící v přímce určují trojúhelník. C. Co to je, víme. Jak ho definovat?
 3..4 Trojúhelní Předpolady: 303 Každé tři různé body neležící v přímce určují trojúhelní. o to je, víme. Ja ho definovat? Př. : Definuj trojúhelní jao průni polorovin. Trojúhelní je průni polorovin, a.
3..4 Trojúhelní Předpolady: 303 Každé tři různé body neležící v přímce určují trojúhelní. o to je, víme. Ja ho definovat? Př. : Definuj trojúhelní jao průni polorovin. Trojúhelní je průni polorovin, a.
I T2 sériové terénní vozy II T1 upravené terénní vozy vylepšené terénní vozy III T4 terénní kamiony
 Článek 281-2014 - KLASIFIKACE A DEFINICE TERÉNNÍCH VOZŮ 1. KLASIFIKACE 1.1 Kategorie a skupiny Automobily používané pro cross-country rallye jsou rozděleny do následujících kategorií a skupin: Kategorie
Článek 281-2014 - KLASIFIKACE A DEFINICE TERÉNNÍCH VOZŮ 1. KLASIFIKACE 1.1 Kategorie a skupiny Automobily používané pro cross-country rallye jsou rozděleny do následujících kategorií a skupin: Kategorie
1 BUBNOVÁ BRZDA. Bubnové brzdy používané u vozidel jsou třecí s vnitřními brzdovými čelistmi.
 1 BUBNOVÁ BRZDA Bubnové brzdy používané u vozidel jsou třecí s vnitřními brzdovými čelistmi. Nejdůležitější části bubnové brzdy : brzdový buben, brzdové čelisti, rozporné zařízení, vratné pružiny, štít
1 BUBNOVÁ BRZDA Bubnové brzdy používané u vozidel jsou třecí s vnitřními brzdovými čelistmi. Nejdůležitější části bubnové brzdy : brzdový buben, brzdové čelisti, rozporné zařízení, vratné pružiny, štít
DUM 09 téma: P edepisování struktury povrchu
 DUM 09 téma: P edepisování struktury povrchu ze sady: 03 tematický okruh sady: Kreslení výrobních výkres ze šablony: 04_Technická dokumentace Ur eno pro :1. ro ník vzd lávací obor: 26-41-M/01 Elektrotechnika
DUM 09 téma: P edepisování struktury povrchu ze sady: 03 tematický okruh sady: Kreslení výrobních výkres ze šablony: 04_Technická dokumentace Ur eno pro :1. ro ník vzd lávací obor: 26-41-M/01 Elektrotechnika
Měření momentu setrvačnosti z doby kmitu
 Úloha č. 4 Měření momentu setrvačnosti z doby kmitu Úkoly měření:. Určete moment setrvačnosti vybraných těles, kruhové a obdélníkové desky.. Stanovení momentu setrvačnosti proveďte s využitím dvou rozdílných
Úloha č. 4 Měření momentu setrvačnosti z doby kmitu Úkoly měření:. Určete moment setrvačnosti vybraných těles, kruhové a obdélníkové desky.. Stanovení momentu setrvačnosti proveďte s využitím dvou rozdílných
Základní prvky a všeobecná lyžařská průprava
 Základní prvky a všeobecná lyžařská průprava Základní prvky a všeobecná lyžařská průprava na běžeckých lyžích Základními prvky nazýváme prvky elementární přípravy a pohybových dovedností, jejichž zvládnutí
Základní prvky a všeobecná lyžařská průprava Základní prvky a všeobecná lyžařská průprava na běžeckých lyžích Základními prvky nazýváme prvky elementární přípravy a pohybových dovedností, jejichž zvládnutí
(3) Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)
 Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)") Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
TECHNICKÉ KRESLENÍ A CAD
 Přednáška č. 7 V ELEKTROTECHNICE Kótování Zjednodušené kótování základních geometrických prvků Někdy stačí k zobrazení pouze jeden pohled Tenké součásti kvádr Kótování Kvádr (základna čtverec) jehlan Kvalitativní
Přednáška č. 7 V ELEKTROTECHNICE Kótování Zjednodušené kótování základních geometrických prvků Někdy stačí k zobrazení pouze jeden pohled Tenké součásti kvádr Kótování Kvádr (základna čtverec) jehlan Kvalitativní
15.11 Úplný klikový mechanismus
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
ASYNCHRONNÍ STROJ. Trojfázové asynchronní stroje. n s = 60.f. Ing. M. Bešta
 Trojfázové asynchronní stroje Trojfázové asynchronní stroje někdy nazývané indukční se většinou provozují v motorickém režimu tzn. jako asynchronní motory (zkratka ASM). Jsou to konstrukčně nejjednodušší
Trojfázové asynchronní stroje Trojfázové asynchronní stroje někdy nazývané indukční se většinou provozují v motorickém režimu tzn. jako asynchronní motory (zkratka ASM). Jsou to konstrukčně nejjednodušší
SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G
 4. ročník bakalářského studia studijní program G studijní obor G") SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 1O POLOHOVÉ VYTYČOVÁNÍ Pod pojem polohového vytyčování se
SYLABUS PŘEDNÁŠKY 6b Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčování) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 1O POLOHOVÉ VYTYČOVÁNÍ Pod pojem polohového vytyčování se
http://cs.wikipedia.org/wiki/elektromotor
 http://cs.wikipedia.org/wiki/elektromotor Krokové motory princip funkce, metody řízení Občas se v praxi vyskytne potřeba pohonu, který umí přesně nastavit svoji polohu a tuto polohu i přes působící síly
http://cs.wikipedia.org/wiki/elektromotor Krokové motory princip funkce, metody řízení Občas se v praxi vyskytne potřeba pohonu, který umí přesně nastavit svoji polohu a tuto polohu i přes působící síly
7. Stropní chlazení, Sálavé panely a pasy - 1. část
 Základy sálavého vytápění (2162063) 7. Stropní chlazení, Sálavé panely a pasy - 1. část 30. 3. 2016 Ing. Jindřich Boháč Obsah přednášek ZSV 1. Obecný úvod o sdílení tepla 2. Tepelná pohoda 3. Velkoplošné
Základy sálavého vytápění (2162063) 7. Stropní chlazení, Sálavé panely a pasy - 1. část 30. 3. 2016 Ing. Jindřich Boháč Obsah přednášek ZSV 1. Obecný úvod o sdílení tepla 2. Tepelná pohoda 3. Velkoplošné
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ÚČEL zmírnit rázy a otřesy karosérie od nerovnosti vozovky, zmenšit namáhání rámu (zejména krutem), udržet všechna kola ve stálém styku s vozovkou.
, udržet všechna kola ve stálém styku s vozovkou.") 4 ODPRUŽENÍ Souhrn prvků automobilu, které vytvářejí pružné spojení mezi nápravami a nástavbou (karosérií). ÚČEL zmírnit rázy a otřesy karosérie od nerovnosti vozovky, zmenšit namáhání rámu (zejména krutem),
4 ODPRUŽENÍ Souhrn prvků automobilu, které vytvářejí pružné spojení mezi nápravami a nástavbou (karosérií). ÚČEL zmírnit rázy a otřesy karosérie od nerovnosti vozovky, zmenšit namáhání rámu (zejména krutem),
Výukový materiál zpracovaný v rámci opera ního programu Vzd lávání pro konkurenceschopnost
 Výukový materiál zpracovaný v rámci opera ního programu Vzd lávání pro konkurenceschopnost Registra ní íslo: CZ.1.07/1. 5.00/34.0084 Šablona: III/2 Inovace a zkvalitn ní výuky prost ednictvím ICT Sada:
Výukový materiál zpracovaný v rámci opera ního programu Vzd lávání pro konkurenceschopnost Registra ní íslo: CZ.1.07/1. 5.00/34.0084 Šablona: III/2 Inovace a zkvalitn ní výuky prost ednictvím ICT Sada:
Příloha č. 1: Zadávací dokumentace
 Příloha č. 1: Zadávací dokumentace 1. Identifikace zadavatele Název: Centrum podpory podnikání Praha, o.s. Sídlo: K Náhonu 987/6, 190 00 Praha 9 Zastoupené: Ing. Davidem Janatou, místopředsedou představenstva
Příloha č. 1: Zadávací dokumentace 1. Identifikace zadavatele Název: Centrum podpory podnikání Praha, o.s. Sídlo: K Náhonu 987/6, 190 00 Praha 9 Zastoupené: Ing. Davidem Janatou, místopředsedou představenstva
Zvyšování kvality výuky technických oborů
 Zvyšování kvality výuky technických oborů Klíčová aktivita V.2 Inovace a zkvalitnění výuky směřující k rozvoji odborných kompetencí žáků středních škol Téma V.2.14 Konstrukce stolového a lůžkového nábytku
Zvyšování kvality výuky technických oborů Klíčová aktivita V.2 Inovace a zkvalitnění výuky směřující k rozvoji odborných kompetencí žáků středních škol Téma V.2.14 Konstrukce stolového a lůžkového nábytku
TECHNICKÁ DOKUMENTACE NA PC
 TECHNICKÁ DOKUMENTACE NA PC Vypracovala: Jitka Chocholoušková 1 Obsah: 1. Uživatelské prostředí... 4 2. Tvorba objektů... 7 3. Tvorba úsečky... 10 4. Tvorba kružnice a oblouku... 15 4.1. Tvorba kružnice...
TECHNICKÁ DOKUMENTACE NA PC Vypracovala: Jitka Chocholoušková 1 Obsah: 1. Uživatelské prostředí... 4 2. Tvorba objektů... 7 3. Tvorba úsečky... 10 4. Tvorba kružnice a oblouku... 15 4.1. Tvorba kružnice...
Jednořadá kuličková ložiska... 289. Jednořadá kuličková ložiska s plnicími drážkami... 361. Nerezová jednořadá kuličková ložiska...
 Kuličková ložiska Jednořadá kuličková ložiska... 289 Jednořadá kuličková ložiska s plnicími drážkami... 361 Nerezová jednořadá kuličková ložiska... 373 Dvouřadá kuličková ložiska... 391 Jednořadé vačkové
Kuličková ložiska Jednořadá kuličková ložiska... 289 Jednořadá kuličková ložiska s plnicími drážkami... 361 Nerezová jednořadá kuličková ložiska... 373 Dvouřadá kuličková ložiska... 391 Jednořadé vačkové
Kapalinová brzdová soustava
 Kapalinová brzdová soustava Kapalinová brzdová soustava se skládá z brzdového pedálu, dvouokruhového hlavního válce s posilovačem brzdné síly, systému potrubí, omezovače brzdného tlaku a brzdových válců
Kapalinová brzdová soustava Kapalinová brzdová soustava se skládá z brzdového pedálu, dvouokruhového hlavního válce s posilovačem brzdné síly, systému potrubí, omezovače brzdného tlaku a brzdových válců
L 110/18 Úřední věstník Evropské unie 24.4.2012
 L 110/18 Úřední věstník Evropské unie 24.4.2012 NAŘÍZENÍ KOMISE (EU) č. 351/2012 ze dne 23. dubna 2012, kterým se provádí nařízení Evropského parlamentu a Rady (ES) č. 661/2009, pokud jde o požadavky pro
L 110/18 Úřední věstník Evropské unie 24.4.2012 NAŘÍZENÍ KOMISE (EU) č. 351/2012 ze dne 23. dubna 2012, kterým se provádí nařízení Evropského parlamentu a Rady (ES) č. 661/2009, pokud jde o požadavky pro
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Teoretické řešení střech
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
Příloha č.1 k č.j.: HSBM-624-2/2013. Technická specifikace
 Technická specifikace Věcné prostředky PO (čerpadla, stan) povodně 2013 Předmět a určení technické specifikace Tato technická specifikace vymezuje technické požadavky pro pořízení Věcné prostředky PO (čerpadla)
Technická specifikace Věcné prostředky PO (čerpadla, stan) povodně 2013 Předmět a určení technické specifikace Tato technická specifikace vymezuje technické požadavky pro pořízení Věcné prostředky PO (čerpadla)
Model Nosnost Zdvih Horní rám při Spodní rám Motor počet / Čas zdvihu Váha Q E A x B H A1 x B1 380V-50Hz průměr W kg mm mm mm mm Kw mm s kg
 ROZMĚRY ZVEDACÍCH PLOŠIN BOLZONI-AURAMO TYP 1.A - "HEAVY DUTY" PRO ČÁSTEČNĚ KONCENTROVANÝ NÁKLAD Zvedací plošina s jedním nůžkovým mechanizmem, vhodná i do těžkých provozů. Model Nosnost Zdvih Horní rám
ROZMĚRY ZVEDACÍCH PLOŠIN BOLZONI-AURAMO TYP 1.A - "HEAVY DUTY" PRO ČÁSTEČNĚ KONCENTROVANÝ NÁKLAD Zvedací plošina s jedním nůžkovým mechanizmem, vhodná i do těžkých provozů. Model Nosnost Zdvih Horní rám
Přednáška č.10 Ložiska
 Fakulta strojní VŠB-TUO Přednáška č.10 Ložiska LOŽISKA Ložiska jsou základním komponentem všech otáčivých strojů. Ložisko je strojní součást vymezující vzájemnou polohu dvou stýkajících se částí mechanismu
Fakulta strojní VŠB-TUO Přednáška č.10 Ložiska LOŽISKA Ložiska jsou základním komponentem všech otáčivých strojů. Ložisko je strojní součást vymezující vzájemnou polohu dvou stýkajících se částí mechanismu
Vyvažování tuhého rotoru v jedné rovině přístrojem Adash 4900 - Vibrio
 Aplikační list Vyvažování tuhého rotoru v jedné rovině přístrojem Adash 4900 - Vibrio Ref: 15032007 KM Obsah Vyvažování v jedné rovině bez měření fáze signálu...3 Nevýhody vyvažování jednoduchými přístroji...3
Aplikační list Vyvažování tuhého rotoru v jedné rovině přístrojem Adash 4900 - Vibrio Ref: 15032007 KM Obsah Vyvažování v jedné rovině bez měření fáze signálu...3 Nevýhody vyvažování jednoduchými přístroji...3
SPOJE ŠROUBOVÉ. Mezi nejdůleţitější geometrické charakteristiky závitů patří tyto veličiny:
 SPOJE ŠROUBOVÉ Šroubové spoje patří mezi nejstarší a nejpoužívanější rozebíratelné spoje se silovým stykem. Všechny spojovací součástky šroubových i ostatních rozebíratelných spojů jsou normalizované.
SPOJE ŠROUBOVÉ Šroubové spoje patří mezi nejstarší a nejpoužívanější rozebíratelné spoje se silovým stykem. Všechny spojovací součástky šroubových i ostatních rozebíratelných spojů jsou normalizované.
MECHANICKY OVLÁDANÉ SPOJKY
 MATURITNÍ ZKOUŠKA PRAKTICKÁ ZKOUŠKA Z ODBORNÝCH PŘEDMĚTŮ MECHANICKY OVLÁDANÉ SPOJKY Studijní obor: 78-41-M/001 Technické lyceum Třída: 4. TL/B Školní rok: 2005/2006 Vypracoval: Lukáš Hroudný Prohlášení
MATURITNÍ ZKOUŠKA PRAKTICKÁ ZKOUŠKA Z ODBORNÝCH PŘEDMĚTŮ MECHANICKY OVLÁDANÉ SPOJKY Studijní obor: 78-41-M/001 Technické lyceum Třída: 4. TL/B Školní rok: 2005/2006 Vypracoval: Lukáš Hroudný Prohlášení
7. Odraz a lom. 7.1 Rovinná rozhraní dielektrik - základní pojmy
 Trivium z optiky 45 7 draz a lom V této kapitole se budeme zabývat průchodem (lomem) a odrazem světla od rozhraní dvou homogenních izotropních prostředí Pro jednoduchost se omezíme na rozhraní rovinná
Trivium z optiky 45 7 draz a lom V této kapitole se budeme zabývat průchodem (lomem) a odrazem světla od rozhraní dvou homogenních izotropních prostředí Pro jednoduchost se omezíme na rozhraní rovinná
na tyč působit moment síly M, určený ze vztahu (9). Periodu kmitu T tohoto kyvadla lze určit ze vztahu:
. Periodu kmitu T tohoto kyvadla lze určit ze vztahu:") Úloha Autoři Zaměření FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE 2. Měření modulu pružnosti v tahu a modulu pružnosti ve smyku Martin Dlask Měřeno 11. 10., 18. 10., 25. 10. 2012 Jakub Šnor SOFE Klasifikace
Úloha Autoři Zaměření FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE 2. Měření modulu pružnosti v tahu a modulu pružnosti ve smyku Martin Dlask Měřeno 11. 10., 18. 10., 25. 10. 2012 Jakub Šnor SOFE Klasifikace
Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]
![Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]](/thumbs/34/13145181.jpg "Aplikované úlohy Solid Edge. SPŠSE a VOŠ Liberec. Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.]") Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.] 1 CÍL KAPITOLY Cílem této kapitoly je naučit uživatele efektivně navrhovat objekty v režimu
Aplikované úlohy Solid Edge SPŠSE a VOŠ Liberec Ing. Jiří Haňáček [ÚLOHA 03 VYSUNUTÍ TAŽENÍM A SPOJENÍM PROFILŮ.] 1 CÍL KAPITOLY Cílem této kapitoly je naučit uživatele efektivně navrhovat objekty v režimu
ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ
 ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ Pozemkem se podle 2 písm. a) katastrálního zákona rozumí část zemského povrchu, a to část taková, která je od sousedních částí zemského povrchu (sousedních pozemků)
ČÁST PÁTÁ POZEMKY V KATASTRU NEMOVITOSTÍ Pozemkem se podle 2 písm. a) katastrálního zákona rozumí část zemského povrchu, a to část taková, která je od sousedních částí zemského povrchu (sousedních pozemků)
Antény. Zpracoval: Ing. Jiří. Sehnal. 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén
 ANTÉNY Sehnal Zpracoval: Ing. Jiří Antény 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén Pod pojmem anténa rozumíme obecně prvek, který zprostředkuje přechod elektromagnetické
ANTÉNY Sehnal Zpracoval: Ing. Jiří Antény 1.Napájecí vedení 2.Charakteristické vlastnosti antén a základní druhy antén Pod pojmem anténa rozumíme obecně prvek, který zprostředkuje přechod elektromagnetické
Optické přístroje. Lidské oko
 Optické přístroje Lidské oko Oko je kulovitého tvaru o průměru asi 4 mm, má hlavní části: Rohovka Duhovka Zornice (oční pupila): otvor v duhovce, průměr se mění s osvětlením oka (max.,5 mm) Oční čočka:
Optické přístroje Lidské oko Oko je kulovitého tvaru o průměru asi 4 mm, má hlavní části: Rohovka Duhovka Zornice (oční pupila): otvor v duhovce, průměr se mění s osvětlením oka (max.,5 mm) Oční čočka:
KOLEJOVÝ JEŘÁB GOTTWALD GS 150.14 TR
 KOLEJOVÝ JEŘÁB GOTTWALD GS 150.14 TR Kolejový jeřáb Gottwald GS 150.14 TR se svými parametry řadí mezi nejvýkonnější kolejové jeřáby v Evropě. Jeho konstrukce umožňuje manipulaci s břemeny, které v našich
KOLEJOVÝ JEŘÁB GOTTWALD GS 150.14 TR Kolejový jeřáb Gottwald GS 150.14 TR se svými parametry řadí mezi nejvýkonnější kolejové jeřáby v Evropě. Jeho konstrukce umožňuje manipulaci s břemeny, které v našich
Elektrická měření 4: 4/ Osciloskop (blokové schéma, činnost bloků, zobrazení průběhu na stínítku )
") Elektrická měření 4: 4/ Osciloskop (blokové schéma, činnost bloků, zobrazení průběhu na stínítku ) Osciloskop měřicí přístroj umožňující sledování průběhů napětí nebo i jiných elektrických i neelektrických
Elektrická měření 4: 4/ Osciloskop (blokové schéma, činnost bloků, zobrazení průběhu na stínítku ) Osciloskop měřicí přístroj umožňující sledování průběhů napětí nebo i jiných elektrických i neelektrických
3. Dynamika. Obecné odvození: a ~ F a ~ m. Zrychlení je přímo úměrné F a nepřímo úměrné m. 3. 2. 1 Výpočet síly a stanovení jednotky newton. F = m.
 3. Dynamika Zabývá se říčinou ohybu (jak vzniká a jak se udržuje). Vše se odehrávalo na základě řesných okusů, vše shrnul Isac Newton v díle Matematické základy fyziky. Z díla vylývají 3 ohybové zákony.
3. Dynamika Zabývá se říčinou ohybu (jak vzniká a jak se udržuje). Vše se odehrávalo na základě řesných okusů, vše shrnul Isac Newton v díle Matematické základy fyziky. Z díla vylývají 3 ohybové zákony.
Číslicová technika 3 učební texty (SPŠ Zlín) str.: - 1 -
 str.: - 1 -") Číslicová technika učební texty (SPŠ Zlín) str.: - -.. ČÍTAČE Mnohá logická rozhodnutí jsou založena na vyhodnocení počtu opakujících se jevů. Takovými jevy jsou např. rychlost otáčení nebo cykly stroje,
Číslicová technika učební texty (SPŠ Zlín) str.: - -.. ČÍTAČE Mnohá logická rozhodnutí jsou založena na vyhodnocení počtu opakujících se jevů. Takovými jevy jsou např. rychlost otáčení nebo cykly stroje,
Seznámení s možnostmi Autodesk Inventoru 2012
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Autodesk Inventor 8 vysunutí
 Nyní je náčrt posazen rohem do počátku souřadného systému. Autodesk Inventor 8 vysunutí Následující text popisuje vznik 3D modelu pomocí příkazu Vysunout. Vyjdeme z náčrtu na obrázku 1. Obrázek 1: Náčrt
Nyní je náčrt posazen rohem do počátku souřadného systému. Autodesk Inventor 8 vysunutí Následující text popisuje vznik 3D modelu pomocí příkazu Vysunout. Vyjdeme z náčrtu na obrázku 1. Obrázek 1: Náčrt
TVAROVÉ A ROZMĚROVÉ PARAMETRY V OBRAZOVÉ DOKUMENTACI. Druhy kót Části kót Hlavní zásady kótování Odkazová čára Soustavy kót
 TVAROVÉ A ROZMĚROVÉ PARAMETRY V OBRAZOVÉ DOKUMENTACI Druhy kót Části kót Hlavní zásady kótování Odkazová čára Soustavy kót KÓTOVÁNÍ Kótování jednoznačné určení rozměrů a umístění všech tvarových podrobností
TVAROVÉ A ROZMĚROVÉ PARAMETRY V OBRAZOVÉ DOKUMENTACI Druhy kót Části kót Hlavní zásady kótování Odkazová čára Soustavy kót KÓTOVÁNÍ Kótování jednoznačné určení rozměrů a umístění všech tvarových podrobností
NÁVOD K OBSLUZE PRO REGULÁTOR KOMEXTHERM STABIL 02.2 D
 NÁVOD K OBSLUZE PRO REGULÁTOR KOMEXTHERM STABIL 02.2 D OBSAH: str. 1. Určení 2 2. Funkce.. 2 3. Popis.. 4 4. Přednosti 4 5. Montáž... 5 5.1 Montáž mechanická... 5 5.2 Montáž elektro 5 5.3 Montáž čidel
NÁVOD K OBSLUZE PRO REGULÁTOR KOMEXTHERM STABIL 02.2 D OBSAH: str. 1. Určení 2 2. Funkce.. 2 3. Popis.. 4 4. Přednosti 4 5. Montáž... 5 5.1 Montáž mechanická... 5 5.2 Montáž elektro 5 5.3 Montáž čidel
MOTOROVÝ VŮZ 173 002-7 DR OD FIRMY KRES 21.12.2015
 V roce 1965 představila vagonka Bautzen jako následníka stroje VT 4.12.01 (173 001) z roku 1964 druhý prototyp s označením VT 4.12.02, takzvaný kolejový autobus (Schienenbus). Vůz měl větší výkon než jednička
V roce 1965 představila vagonka Bautzen jako následníka stroje VT 4.12.01 (173 001) z roku 1964 druhý prototyp s označením VT 4.12.02, takzvaný kolejový autobus (Schienenbus). Vůz měl větší výkon než jednička
1 ŘÍZENÍ S POSILOVAČEM
 1 ŘÍZENÍ S POSILOVAČEM Účel : Snížení ovládací síly při běžném převodu řízení. Poznámka : Pro natočení rejdových kol u vozidel s velkým zatížením řídící nápravy je nutno vyvinout velkou ovládací sílu její
1 ŘÍZENÍ S POSILOVAČEM Účel : Snížení ovládací síly při běžném převodu řízení. Poznámka : Pro natočení rejdových kol u vozidel s velkým zatížením řídící nápravy je nutno vyvinout velkou ovládací sílu její
Přeplňování zážehových motorů
 Přeplňování zážehových motorů Cílem přeplňování ZM je především zvýšení výkonu motoru (ale i zlepšení hospodárnosti provozu a snižování obsahu škodlivin ve výfukových plynech). Zvyšování výkonu, resp.
Přeplňování zážehových motorů Cílem přeplňování ZM je především zvýšení výkonu motoru (ale i zlepšení hospodárnosti provozu a snižování obsahu škodlivin ve výfukových plynech). Zvyšování výkonu, resp.
ÚVOD. V jejich stínu pak na trhu nalezneme i tzv. větrné mikroelektrárny, které se vyznačují malý
 Mikroelektrárny ÚVOD Vedle solárních článků pro potřeby výroby el. energie, jsou k dispozici i další možnosti. Jednou jsou i větrné elektrárny. Pro účely malých výkonů slouží malé a mikroelektrárny malých
Mikroelektrárny ÚVOD Vedle solárních článků pro potřeby výroby el. energie, jsou k dispozici i další možnosti. Jednou jsou i větrné elektrárny. Pro účely malých výkonů slouží malé a mikroelektrárny malých
ISŠT Mělník. Integrovaná střední škola technická Mělník, K učilišti 2566, 276 01 Mělník Ing.František Moravec
 ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.03 Integrovaná střední škola technická Mělník, K učilišti 2566,
ISŠT Mělník Číslo projektu Označení materiálu Název školy Autor Tematická oblast Ročník Anotace CZ.1.07/1.5.00/34.0061 VY_32_INOVACE_H.3.03 Integrovaná střední škola technická Mělník, K učilišti 2566,
REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR
 REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR Katalog výrobků : PŘEVODOVÉ MOTORY OBSAH. Všeobecné údaje. Převodový synchronní motor reverzační B 406 3. Převodový synchronní motor reverzační B 408 4A.
REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR Katalog výrobků : PŘEVODOVÉ MOTORY OBSAH. Všeobecné údaje. Převodový synchronní motor reverzační B 406 3. Převodový synchronní motor reverzační B 408 4A.
3.cvičení. k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR. 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ),
, v(y, r 1 = XA ) u v = {A, R} q = AR. 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ),") 3.cvičení 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ), k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR Bodem A rovnoběžku: Ještě jednu kolmici. Tři úhly, které je možno rozdělit
3.cvičení 1. Bodem A kolmici: Zvolím bod X p k(a, r 1 = XA ), k p = {X, Y } u(x, r 1 = XA ), v(y, r 1 = XA ) u v = {A, R} q = AR Bodem A rovnoběžku: Ještě jednu kolmici. Tři úhly, které je možno rozdělit
2. STANOVENÍ TEPELNÉ VODIVOSTI.
 METODA M-100-2003 experimentu a výpočtu součinitele tepelné vodivosti pro ultratenké izolační vrstvy, pokyny pro stanovení teploty na povrchu izolační vrstvy. Úvod Tyto metodické pokyny poskytují návod
METODA M-100-2003 experimentu a výpočtu součinitele tepelné vodivosti pro ultratenké izolační vrstvy, pokyny pro stanovení teploty na povrchu izolační vrstvy. Úvod Tyto metodické pokyny poskytují návod
NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640. V/2 Inovace a zkvalitnění výuky prostřednictvím ICT
 NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640 ŠABLONA: NÁZEV PROJEKTU: REGISTRAČNÍ ČÍSLO PROJEKTU: V/2 Inovace a zkvalitnění výuky prostřednictvím ICT Zlepšení podmínek pro vzdělávání
NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640 ŠABLONA: NÁZEV PROJEKTU: REGISTRAČNÍ ČÍSLO PROJEKTU: V/2 Inovace a zkvalitnění výuky prostřednictvím ICT Zlepšení podmínek pro vzdělávání
Dynamika tuhých těles
 Dynamika tuhých těles V reálných technických aplikacích lze model bodového tělesa použít jen v omezené míře. Mnohem častější je použití modelu tuhého tělesa. Tuhé těleso je definováno jako těleso, u něhož
Dynamika tuhých těles V reálných technických aplikacích lze model bodového tělesa použít jen v omezené míře. Mnohem častější je použití modelu tuhého tělesa. Tuhé těleso je definováno jako těleso, u něhož
Předmět: Ročník: Vytvořil: Datum: ŠČERBOVÁ M. PAVELKA V. VZPĚR VZPĚR
 Předmět: Ročník: Vytvořil: Datum: MECHANIKA DRUHÝ ŠČERBOVÁ M. PAVELKA V. 8. ZÁŘÍ 2013 Název zpracovaného celku: VZPĚR VZPĚR U všech předcházejících druhů namáhání byla funkce součásti ohroţena překročením
Předmět: Ročník: Vytvořil: Datum: MECHANIKA DRUHÝ ŠČERBOVÁ M. PAVELKA V. 8. ZÁŘÍ 2013 Název zpracovaného celku: VZPĚR VZPĚR U všech předcházejících druhů namáhání byla funkce součásti ohroţena překročením
Výzva pro předložení nabídek k veřejné zakázce malého rozsahu s názvem Výměna lina
 VÝCHOVNÝ ÚSTAV A ŠKOLNÍ JÍDELNA NOVÁ ROLE Školní 9, Nová Role, PSČ: 362 25, Tel: 353 851 179 Dodavatel: Výzva pro předložení nabídek k veřejné zakázce malého rozsahu s názvem Výměna lina 1. Zadavatel Výchovný
VÝCHOVNÝ ÚSTAV A ŠKOLNÍ JÍDELNA NOVÁ ROLE Školní 9, Nová Role, PSČ: 362 25, Tel: 353 851 179 Dodavatel: Výzva pro předložení nabídek k veřejné zakázce malého rozsahu s názvem Výměna lina 1. Zadavatel Výchovný
Průvodní dokumentace IP-420
 Průvodní dokumentace IP-420 I&TS, spol. s r.o. Havlíčkova 215 280 02 Kolín4 tel: +420-321-723555 e-mail: info@iats.cz http://www.iats.cz 1 TECHNICKÉ PODMÍNKY... 2 1.1 ÚVOD... 2 1.2 VŠEOBECNĚ... 2 1.2.1
Průvodní dokumentace IP-420 I&TS, spol. s r.o. Havlíčkova 215 280 02 Kolín4 tel: +420-321-723555 e-mail: info@iats.cz http://www.iats.cz 1 TECHNICKÉ PODMÍNKY... 2 1.1 ÚVOD... 2 1.2 VŠEOBECNĚ... 2 1.2.1
Merkur MC30F2T - 4osá CNC frézka
 Merkur MC30F2T - 4osá CNC frézka Ing. Richard Němec 1. Stroj MC30xxx Stroj Merkur MC30 je malá stolní tříosá CNC frézka stavebnicové koncepce s variabilním provedením a možností rozšíření na 4 osy. Výrobcem
Merkur MC30F2T - 4osá CNC frézka Ing. Richard Němec 1. Stroj MC30xxx Stroj Merkur MC30 je malá stolní tříosá CNC frézka stavebnicové koncepce s variabilním provedením a možností rozšíření na 4 osy. Výrobcem
MONTÁŽNÍ NÁVOD LIC VÍKO ŠACHTY SE ZAJIŠTĚNÍM
 LIC šachty se zajištěním víka Šachty LIC se dodávají s uzávěrem otočnou západkou, ta má několik důležitých výhod oproti běžným sešroubováním: Po otevření víka nejsou žádné díly (šrouby, U-podložky atd.)
LIC šachty se zajištěním víka Šachty LIC se dodávají s uzávěrem otočnou západkou, ta má několik důležitých výhod oproti běžným sešroubováním: Po otevření víka nejsou žádné díly (šrouby, U-podložky atd.)
OPTIMUM M A S C H I N E N - G E R M A N Y
 www.1bow.cz tel. 585 378 012 OPTIMUM Návod k obsluze Verze 1.1 Dělící hlava TA 125 Návod pečlivě uschovejte pro další použití! OPTIMUM Dělící hlava 1 Rozsah aplikací Dělící hlava TA 125 se používá jako
www.1bow.cz tel. 585 378 012 OPTIMUM Návod k obsluze Verze 1.1 Dělící hlava TA 125 Návod pečlivě uschovejte pro další použití! OPTIMUM Dělící hlava 1 Rozsah aplikací Dělící hlava TA 125 se používá jako
1 KOLA A PNEUMATIKY. Nejčastěji používaná kola automobilů se skládají z těchto částí : disky s ráfky, hlavy (paprskové hlavy), pneumatiky.
, pneumatiky.") 1 KOLA A PNEUMATIKY Nejčastěji používaná kola automobilů se skládají z těchto částí : disky s ráfky, hlavy (paprskové hlavy), pneumatiky. DISKOVÉ KOLO Skládá se z : ráfku zabezpečuje spojení pneumatiky
1 KOLA A PNEUMATIKY Nejčastěji používaná kola automobilů se skládají z těchto částí : disky s ráfky, hlavy (paprskové hlavy), pneumatiky. DISKOVÉ KOLO Skládá se z : ráfku zabezpečuje spojení pneumatiky
NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640. V/2 Inovace a zkvalitnění výuky prostřednictvím ICT
 NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640 ŠABLONA: NÁZEV PROJEKTU: REGISTRAČNÍ ČÍSLO PROJEKTU: V/2 Inovace a zkvalitnění výuky prostřednictvím ICT Zlepšení podmínek pro vzdělávání
NÁZEV ŠKOLY: Střední odborné učiliště, Domažlice, Prokopa Velikého 640 ŠABLONA: NÁZEV PROJEKTU: REGISTRAČNÍ ČÍSLO PROJEKTU: V/2 Inovace a zkvalitnění výuky prostřednictvím ICT Zlepšení podmínek pro vzdělávání
Soustava cívek s nulovou vzájemnou indukčností pro detektory kovů. Z. Jarchovský, P. Socháň. Oblast techniky
 Soustava cívek s nulovou vzájemnou indukčností pro detektory kovů Z. Jarchovský, P. Socháň Oblast techniky Vynález se týká zařízení (indukční sondy), které tvoří soustava cívek s nulovou vzájemnou indukčností
Soustava cívek s nulovou vzájemnou indukčností pro detektory kovů Z. Jarchovský, P. Socháň Oblast techniky Vynález se týká zařízení (indukční sondy), které tvoří soustava cívek s nulovou vzájemnou indukčností
Kapitola 8 Kůň našíř. Článek 30 Popis sestavy na koni našíř. Článek 31 Informace o provedení sestavy
 Kapitola 8 Kůň našíř Výška: 105 cm od horní plochy žíněnky Článek 30 Popis sestavy na koni našíř Současná sestava na koni našíř je charakteristická různými typy kol v provedení s roznožením a snožmo, prováděných
Kapitola 8 Kůň našíř Výška: 105 cm od horní plochy žíněnky Článek 30 Popis sestavy na koni našíř Současná sestava na koni našíř je charakteristická různými typy kol v provedení s roznožením a snožmo, prováděných
Mechanismy strojů hrou
 Mechanismy strojů hrou Projekt Strana 1 Obsah Obsah...2 Úvod...3 Bod 1...3...3...3 Bod 2...3...3...3 Bod 3...4...4...4 Bod 4...5...5...5 Bod 5...5...5...5 Bod 6...6...6...6 Bod 7...7...7...7 Závěr... Chyba!
Mechanismy strojů hrou Projekt Strana 1 Obsah Obsah...2 Úvod...3 Bod 1...3...3...3 Bod 2...3...3...3 Bod 3...4...4...4 Bod 4...5...5...5 Bod 5...5...5...5 Bod 6...6...6...6 Bod 7...7...7...7 Závěr... Chyba!
KINEMATICKÉ ELEMENTY K 5 PLASTOVÉ. doc. Ing. Martin Hynek, Ph.D. a kolektiv. verze - 1.0
 Katedra konstruování stroj Fakulta strojní K 5 PLASTOVÉ KINEMATICKÉ ELEMENTY doc. Ing. Martin Hynek, Ph.D. a kolektiv verze - 1.0 Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpo
Katedra konstruování stroj Fakulta strojní K 5 PLASTOVÉ KINEMATICKÉ ELEMENTY doc. Ing. Martin Hynek, Ph.D. a kolektiv verze - 1.0 Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpo
ELEKTRICKÝ SPORÁK B-E-C-6/900 EOH 2/1 NÁVOD PRO OBSLUHU A SERVIS
 Elektrické sporáky 1 ELEKTRICKÝ SPORÁK B-E-C-6/900 EOH 2/1 NÁVOD PRO OBSLUHU A SERVIS Elektrické sporáky 2 Všeobecné informace: Vážený zákazníku, děkujeme Vám, že jste si vybral tento spotřebič. Před použitím
Elektrické sporáky 1 ELEKTRICKÝ SPORÁK B-E-C-6/900 EOH 2/1 NÁVOD PRO OBSLUHU A SERVIS Elektrické sporáky 2 Všeobecné informace: Vážený zákazníku, děkujeme Vám, že jste si vybral tento spotřebič. Před použitím
NÁKUP ZAHRADNÍ TECHNIKY
 NÁKUP ZAHRADNÍ TECHNIKY Obsah nabídky veřejné zakázky strana 1 A Krycí list nabídky strana 2 B Základní kvalifikační předpoklady strana 3 C Profesní kvalifikační předpoklady strana x D Ekonomické a finanční
NÁKUP ZAHRADNÍ TECHNIKY Obsah nabídky veřejné zakázky strana 1 A Krycí list nabídky strana 2 B Základní kvalifikační předpoklady strana 3 C Profesní kvalifikační předpoklady strana x D Ekonomické a finanční
LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM
 LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM 1 Úvod V roce 2012 byla v rámci projektu TA02011322 Prostorové konstrukce podepřené kabely a/nebo oblouky řešena statická analýza návrhu visuté lanové střechy nad
LANOVÁ STŘECHA NAD ELIPTICKÝM PŮDORYSEM 1 Úvod V roce 2012 byla v rámci projektu TA02011322 Prostorové konstrukce podepřené kabely a/nebo oblouky řešena statická analýza návrhu visuté lanové střechy nad
Zkvalitnění výuky prostřednictvím ICT CZ.1.07/1.5.00/34.0459
 Tento dokument vznikl v rámci projektu Zkvalitnění výuky prostřednictvím ICT Registrační číslo: CZ.1.07/1.5.00/34.0459 Název a číslo projektu Název školy Předmět Tématická oblast Název materiálu Ročník
Tento dokument vznikl v rámci projektu Zkvalitnění výuky prostřednictvím ICT Registrační číslo: CZ.1.07/1.5.00/34.0459 Název a číslo projektu Název školy Předmět Tématická oblast Název materiálu Ročník
Snímače tlaku a síly. Snímače síly
 Snímače tlaku a síly Základní pojmy Síla Moment síly Tlak F [N] M= F.r [Nm] F p = S [ Pa; N / m 2 ] 1 bar = 10 5 Nm -2 1 torr = 133,322 Nm -2 (hydrostatický tlak rtuťového sloupce 1 mm) Atmosférický (barometrický)
Snímače tlaku a síly Základní pojmy Síla Moment síly Tlak F [N] M= F.r [Nm] F p = S [ Pa; N / m 2 ] 1 bar = 10 5 Nm -2 1 torr = 133,322 Nm -2 (hydrostatický tlak rtuťového sloupce 1 mm) Atmosférický (barometrický)
STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA
 STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA ÚVOD Při válcování za studena je povrch vyválcovaného plechu znečištěn oleji či emulzemi, popř. dalšími nečistotami. Nežádoucí
STÍRÁNÍ NEČISTOT, OLEJŮ A EMULZÍ Z KOVOVÝCH PÁSŮ VE VÁLCOVNÁCH ZA STUDENA ÚVOD Při válcování za studena je povrch vyválcovaného plechu znečištěn oleji či emulzemi, popř. dalšími nečistotami. Nežádoucí
Definice tolerování. Technická dokumentace Ing. Lukáš Procházka
 Technická dokumentace Ing. Lukáš Procházka Téma: geometrické tolerance 1) Definice geometrických tolerancí 2) Všeobecné geometrické tolerance 3) Základny geometrických tolerancí 4) Druhy geometrických
Technická dokumentace Ing. Lukáš Procházka Téma: geometrické tolerance 1) Definice geometrických tolerancí 2) Všeobecné geometrické tolerance 3) Základny geometrických tolerancí 4) Druhy geometrických
TECHNICKO POSTUPOVÁ DOKUMENTACE RÁMOVÝCH LEŠENÍ TYPU TERMOSPRZĘT
 TECHNICKO POSTUPOVÁ DOKUMENTACE RÁMOVÝCH LEŠENÍ TYPU TERMOSPRZĘT 1. Vydání Termosprzęt Červen 2002 OBSAH 1. TECHNICKÝ POPIS LEŠENÍ... 5 1.1.FUNKCE LEŠENÍ... 5 1.2.TECHNICKÁ CHARAKTERISTIKA LEŠENÍ... 5
TECHNICKO POSTUPOVÁ DOKUMENTACE RÁMOVÝCH LEŠENÍ TYPU TERMOSPRZĘT 1. Vydání Termosprzęt Červen 2002 OBSAH 1. TECHNICKÝ POPIS LEŠENÍ... 5 1.1.FUNKCE LEŠENÍ... 5 1.2.TECHNICKÁ CHARAKTERISTIKA LEŠENÍ... 5
Hoblování a Obrážení
 Hoblování a Obrážení Hoblováním a obrážením obrábíme vnější i vnitřní rovinné, popřípadě přímkové tvarové plochy jednobřitým nástrojem. Obě metody se rozlišujeme pouze podle toho, kdo koná hlavní řezný
Hoblování a Obrážení Hoblováním a obrážením obrábíme vnější i vnitřní rovinné, popřípadě přímkové tvarové plochy jednobřitým nástrojem. Obě metody se rozlišujeme pouze podle toho, kdo koná hlavní řezný
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Anemometrické metody Učební text Ing. Bc. Michal Malík Ing. Bc. Jiří Primas Liberec 2011 Materiál vznikl v rámci
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Anemometrické metody Učební text Ing. Bc. Michal Malík Ing. Bc. Jiří Primas Liberec 2011 Materiál vznikl v rámci
Měření kruhovitosti/válcovitosti ROUNDTEST RA-2200
 Přístroje na měření tvaru Měření kruhovitosti/válcovitosti ROUNDTEST RA-2200 PRC 161 Měřicí systém kruhovitosti/válcovitosti, který nabízí nejvyšší přesnost ve své třídě, výjimečně snadné používání a multifunkční
Přístroje na měření tvaru Měření kruhovitosti/válcovitosti ROUNDTEST RA-2200 PRC 161 Měřicí systém kruhovitosti/válcovitosti, který nabízí nejvyšší přesnost ve své třídě, výjimečně snadné používání a multifunkční
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191. Obor 23-41-M/01 STROJÍRENSTVÍ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ KRESLENÍ SOUČÁSTÍ A SPOJŮ 2 LOŽISKA
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ KRESLENÍ SOUČÁSTÍ A SPOJŮ 2 LOŽISKA