ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
|
|
|
- Ludvík Kovář
- před 7 lety
- Počet zobrazení:
Transkript


1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA SPECIÁLNÍ GEODÉZIE Testování skenovacího systému HDS 3000 Diplomová práce Vypracovala: Bc. Lucie Popelková Vedoucí diplomové práce: Ing. Tomáš Křemen, Ph.D. 2010
2 2
3 Prohlášení: Prohlašuji, že jsem tuto diplomovou práci vypracovala samostatně pouze za odborného vedení Ing. Tomáše Křemena, Ph.D. a Ing. Jany Pospíšilové. Dále prohlašuji, že všechny zdroje, ze kterých jsem čerpala, jsou uvedeny v seznamu použité literatury. V Praze, dne Lucie Popelková 3
4 Poděkování: Chtěla bych touto cestou poděkovat především Ing. Tomáši Křemenovi. Ph.D. za jeho rady a připomínky, trpělivost a ochotu při vedení mé diplomové práce. Dále pak Ing. Janě Pospíšilové za její rady, které mi velmi pomohly při zpracování. Také děkuji své rodině za podporu a především mamince, která mi studium na vysoké škole umožnila. 4
5 Anotace Pozemní laserové skenovací systémy slouží k bezkontaktnímu určování prostorových souřadnic, tvoření 3D modelů a k vizualizaci tvarově složitých staveb a konstrukcí, podzemních prostor. Tato diplomové práce se zabývá testováním polárního laserového skenovacího systému s pulzním dálkoměrem Leica HDS 3000 a zpracováním měřených dat v programu Geomagic. Zjišťovány byly především rozdíly výsledných 3D modelů, vytvořených v programu Geomagic. Testované 3D modely byly vytvořeny pospojováním jednotlivých měření bez použití vlícovacích bodů. Byly testovány modely vytvořené z různých stanovisek a zaměřeny v různých hustotách. Byla porovnávána shodnost rozměrů skenovaného objektu zjištěná z vytvořených modelů, s rozměry zjištěnými kontrolní metodou. Annotation Terrestrial laser scanning systems makes for obtaining spatial high-definition field data in a direct contact-free way, 3D models and visualization of object with complex form. This diploma work deals with testing of Scanning system HDS 3000 and procesing in Geomagic software. The models made from different positions and with various scanning density had been tested. Proportions of the final models had been compared with another control method. 5
6 OBSAH 1 ÚVOD CÍLE PRÁCE MĚŘENÍ A SBĚR DAT SKENOVACÍ SYSTÉMY SKENOVANÝ OBJEKT POUŽITÉ PŘÍSTROJE Skenovací systém HDS Totální stanice Topcon GPT POSTUP MĚŘENÍ Měření oměrných Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování Opakovatelnost ZPRACOVÁNÍ A VÝSLEDKY MĚŘENÍ OMĚRNÝCH OPAKOVATELNOST Zpracování v programu Cyclone Zpracování v programu Geomagic Bodová fáze Polygonová fáze Grafické znázornění rozdílů Porovnání směrodatných odchylek VLIV ROZMÍSTĚNÍ STANOVISEK A HUSTOTY SKENOVÁNÍ NA PŘESNOST MODELOVÁNÍ Zpracování v programu Cyclone Zpracování v programu Geomagic Grafické znázornění rozdílů Porovnání směrodatných odchylek Porovnání délek ZHODNOCENÍ VÝSLEDKŮ OPAKOVATELNOST VLIV ROZMÍSTĚNÍ STANOVISEK A HUSTOTY SKENOVÁNÍ NA PŘESNOST MODELOVÁNÍ ZÁVĚR SEZNAM POUŽITÉ LITERATURY SEZNAM PŘÍLOH
7 1 ÚVOD Laserové skenování představuje revoluci v pořizování dokumentace prostorově složitých objektů a konstrukcí, jako např. fasády historických budov, provozy v průmyslových stavbách, štoly, tunely, atd. Využití metody laserového skenování umožňuje řešit takové úlohy, které by za využití klasických metod geodézie nebo fotogrammetrie nebyly možné, nebo jen velmi obtížně s nepoměrně vyššími náklady. Laserové skenovací systémy slouží k bezkontaktnímu určování prostorových souřadnic, tvoření 3D modelů a k vizualizaci tvarově složitých staveb a konstrukcí, podzemních prostor, atd. Za největší výhody skenovacích systémů můžeme považovat rychlost, přesnost a bezpečnost při pořizování dat. Zejména rychlost, se kterou lze získat potřebná data, je několikanásobně vyšší, než u klasických metod inženýrské geodézie či fotogrammetrie. V dnešní době se vědecká pracoviště zabývají především otázkami automatizace zpracování měření a kalibracemi. Otázky optimalizace měřického procesu a přesnosti vytvoření 3D modelů zůstávají na okraji zájmu, ačkoli dosud nebyly uspokojivě zodpovězeny. Obsahem této diplomové práce bude zjištění optimálního způsobu zpracování měřených dat a jejich vyhodnocení s použitím vybraných softwarů. Bude zjišťováno, jakou měrou ovlivňuje rozložení stanovisek, volba hustoty skenování a zvolené postupy zpracování výsledné modely a jejich přesnost. Dále bude posuzována přesnost opakovaného měření. Měření bude provedeno pozemním laserovým skenovacím systémem Leica HDS 3000 a všechna naměřená data budou zpracována pomocí softwarů Cyclone a Geomagic. Výsledné výstupy budou porovnány s další nezávislou metodou měření. Tato diplomová práce je zpracováním části naměřených dat pro disertační práci Ing. Jany Pospíšilové, která se ve své práci zabývá optimalizací měření, použitím vlícovacích bodů, vlivem hustot a velikostí objektu na přesnost modelování. 7
8 2 CÍLE PRÁCE V této diplomové práci budou řešena 2 témata: Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování Cílem práce je zjistit, jaký vliv má rozmístění stanovisek a zvolená hustota skenování na přesnost modelování. Tato problematika bude řešena na vhodném referenčním objektu. Objekt bude naskenován z několika stanovisek v různých hustotách a výsledný 3D model bude vytvořen z vybraných stanovisek nebo ze všech. Zpracování bude provedeno v jednom vybraném softwaru. Rozměry výsledného modelu budou porovnány s hodnotami zjištěnými jinou nezávislou metodou. Opakovatelnost Úkolem v této části práce bude ověřit, jak se opakováním měření za nezměněné pozice skeneru mění výsledná přesnost modelu. 8
9 3 MĚŘENÍ A SBĚR DAT 3.1 Skenovací systémy Skenery můžeme rozdělit na tzv. 2D a 3D skenery. U 2D skenerů je laserový svazek vychylován pouze v jedné rovině. Chceme-li tedy nasnímat prostorový objekt, musíme se skenerem pohybovat. Jejich využití je nejčastější při získávání digitálního modelu terénu vetšího rozsahu, mapování břehů řek, při dokumetaci liniových staveb (silnice, produktovody, ). Tyto skenery bývají umístěny na mobilní platformě, jejíž pohyb zajišťuje získání 3D dat. Jedná se především o letecké skenování za použití letadel, vrtulníků apod. V posledních několika letech se začínají používat tzv. mobilní systémy, kdy je skener nesen automobilem [1]. Pro potřeby inženýrské geodézie se ale častěji používají 3D skenery, jejichž laserový svazek je vychylován do celého zorného pole skeneru, a ten tedy může zůstat v klidu. Využívají se v architektuře, urbanismu, při dokumentaci složitých technologických a průmyslových provozů, nebo např. při určování kubatur. Jedná se především o pozemní skenery. 3D skenery můžeme dále dělit na polární skenery a skenery se základnou. Polární skenery funguji v podstatě jako totální stanice s bezhranolových dálkoměrem. Dálkoměr je na principu měření tranzitního času nebo fázového posunu. Skenery se základnou určují souřadnice na základě protínání z úhlů ze základny. [2] 3.2 Skenovaný objekt Skenovaný objekt se nachází na prostranství před Teologickou fakultou UK v Praze Dejvicích Skenovaným objeketem je pomník pražského arcibiskupa Kardinála Josefa Berana, postavený k příležitosti 40. výročí jeho úmrtí (Obrázek 1). Jedná se o klečící postavu Kardinála Berana v nadživotní velikosti vytesaná z jednoho kusu šedočerného prachatického (křišťanovského) dioritu. Postava klečí na hrubě olámaném kvádru ze žluté mrákotinské žuly. Před ní je na skloněné ploše umístěná leštěná deska z jihoafrického gabra Impala nesoucí Kardinálův životopis. Pozadí pomníku tvoří brána, sestavená z hrubě opracovaných kvádrů žluté a šedé mrákotínské žuly. Pruh mezi pomníkem a touto bránou je z leštěné vahlovické žuly. [3] Pomník vytvořil známý český sochař prof. Stanislav Hanzík. 9

10 Kardinál Josef Beran Josef Beran se narodil v Plzni a v roce 1911 byl vysvěcen na kněze. Byl katolický duchovní a teolog, 33. arcibiskup pražský a primas český v letech Byl vezněm nacistického i komunistického režimu, a symbolem odporu proti totalitní moci. Pro svůj postoj je považován, společně s T.G.Masarykem, za nejvýraznější postavu českých dějin 20.století. Je jediným českým biskupem, který promluvil na II. vatikánském koncilu. Zemřel 17.května roku 1969 v Římě. Komunistická vláda nepovolila jeho převoz do Čech, a proto se dočkal té pocty, že jako jediný Čech je pohřben po boku papežů, v chrámu sv.petra v Římě.[4] Obrázek 1: Památník Kardinála Josefa Berana 10
11 3.4 Použité přístroje Skenovací systém HDS 3000 Pro získání dat k této DP, byl použit skenovací systém Leica HDS3000 (High definition surveying) firmy Leica Geosystem (Obrázek 2). Jedná se o polární panormatický 3D laserový skenovací systém. Systém HDS 3000 je přímým nástupcem systému HDS 2500 ( u nás známý jako Cyrax 2500), od kterého se liší zorným polem, které je v tomto případě 360 ve vodorovné rovině a 270 ve svislé rovině. Pracovní dosah tohoto skeneru je 134 m při odrazivosti 18% s polohovou přesností 6 mm/50 m. Pulzní laser skeneru v zelené barvě je zařazen do bezpečnostní třídy 3R podle IEC Přístroj je doplněn digitální kamerou s automatickým pokrytím mračna bodů v přirozených barvách. Je umístěn na klasickém geodetickém stativu se standardní trojnožkou s možností centrace, horizontace (pomocí krabicové libely) a orientace. Skener je ovládán softwarem Cyclone instalovaným na notebooku. Rychlost skenování až 4000 bodů za sekundu.[5] Totální stanice Topcon GPT 7501 Totální stanice Topcon řady GPT-7500 (Obrázek 3) je vybavena bezhranolovou technologií, vestavěným operačním systémem Windows CE, softwarovým vybavením TopSURV a velkým, grafickým, dotykovým displejem. Technické parametry [6] Dalekohled: Zvětšení 30 x Zorné pole 1 30 Min. zaostření 1,30 m Osvětlení nit.kříže Ano 11
12 Měření délek (Hranol): Mini hranol 1000 m 1 hranol 3000 m Přesnost ± (2mm + 2ppm) Měření délek (Bez hranolu) Dosah (Kodak white) 1.5 ~ 250m / 5 ~ 2000m Přesnost ±5mm / ±10mm Velikost laserového paprsku 2x4 cm / 100m Třída laseru Třída 1 Měření úhlů: Přesnost (DIN 18723) 1 (0.3mgon) Minim. čtení 0.5 (0.1mgon) Rozsah kompenzace ± 6 Počítačová jednotka: Procesor Intel PXA255, 400 MHz Operační systém Microsoft Windows CE.NET 4.2 Paměť interní 128 MB / CompactFlash karta Displej LCD dotykový, 3.5 inch TFT Color LCD Optická centrace: Zvětšení 3 x Zorné pole 4 Další parametry: Rozměry Vytyčovací světla Bluetooth Váha (včetně baterie) 338x 212x 197mm Ano Volitelně Bluetooh CF karta 5 kg 12


13 Obrázek 2:Leica HDS 3000 Obrázek 3:Topcon GPT
14 3.5 Postup měření Meření probíhalo ve třech termínech. Pro Testování vlivu rozmístění stanovisek a hustoty skenování na přesnost modelování byl dne památník naskenován z pěti stanovisek, avšak kvůli nepřízni počasí muselo být skenování přerušeno. Skenování ze zbylých tří stanovisek proběhlo dne Měření pro úlohu Opakovatelnost proběhlo dne a kromě skenování bylo provedeno i doplňkové měření (Měření oměrných). V této kapitole bude popsán postup sběru dat, volba stanovisek pro skenování, volba podrobných bodů Měření oměrných Měřeno bylo dne Cílem úlohy bylo zjistit oměrné délky metodou protínání ze základny. Meřeno bylo totální stanicí Topcon 7501, postavenou na stativech téže značky. Body byly signalizovány hrotem výtyčky Leica. Měřené hodnoty byly zapsány do zápisníku bez registrace. Celkem bylo zaměřeno 22 bodů a dále bylo změřeno 9 oměrných délek pásmem. Rozvržení stanovisek a volba bodů Byla zvolena čtyři stanoviska (A-D), umístěná úhlopříčně, přibližně 8-10m od sochy. Každá dvě sousední stanoviska tvořila základnu, ze které se současně měřily zvolené body. Základny byly přibližně rovnoběžné s bočními, resp. zadní stranou sochy (Obrázek 4). Podrobné body byly voleny tak, aby byly dobře viditelné, zaměřitelné z obou bodů základny a dobře charakterizovaly rozměry objektu. Signalizovány byly rohy či hrany objektu. Měřeno bylo ze tří základen AB, BC a CD. Z každé základny bylo měřeno současně z obou koncových bodů. Ze základny AB bylo zaměřeno 11 bodů, ze základny BC 4 body a ze základny CD 7 bodů. Vodorovné směry a zenitové úhly na podrobné body byly měřeny v jedné skupině. Délky mezi body tvořícími základnu byly měřeny obousměrně. Převýšení mezi body každé základny bylo měřeno dvakrát a obousměrně. Všechny body tvořící základny ležely v jednou souřadnicové soustavě a byly tedy vzájemně provázány. 14
15 Obrázek 4: Zvolení základen Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování Skenování památníku Kardinála Josefa Berana pro tento experiment proběhlo v termínech a Objekt byl naskenován z osmi různých stanovisek, umístěných okolo objektu (Obrázek 5). Čtyři stanoviska jsou rohová a čtyři boční. Z každého stanoviska se skenovalo ve čtyřech hustotách: 5 mm x 5mm, 10 mm x 10 mm, 20 mm x 20 mm a 50 mm x 50 mm. Při nastavování parametrů skenování, byla hustota nastavena na střed pomníku. Smyslem této části úlohy, je vytvořit modely skenovaného objektu ve všech hustotách, a to buď ze všech osmi stanovisek a nebo ze čtyř rohových stanovisek. Následně tyto modely mezi sebou porovnáme a vytvoříme rozdílové modely. Porovnány budou modely vytvořené ze čtyř stanovisek s modely z osmi stanovisek v rámci každé hustoty. Poté budou porovnány modely všech hustot, vytvořené ze stejných stanovisek. 15
16 Obrázek 5: Rozmístění stanovisek Opakovatelnost Sběr dat pro tuto úlohu proběhl , za jasného slunečného počasí. Objekt byl naskenován z jednoho stanoviska. Toto stanovisko bylo voleno tak, aby polohově co nejvíce odpovídalo stanovisku č.7 z úlohy (Obrázek 6). Skenování proběhlo sedmkrát s hustotou 5 mm x 5 mm, přičemž byly před každým skenováním takto změněny podmínky : 3x měření po sobě bez změny nastavení, 2x zadána nová ohrada měření, 2x skenováno po vypnutí a následném zapnutí skeneru. 16
17 Obrázek 6: Stanovisko pro úlohu Opakovatelnost 17
18 4 ZPRACOVÁNÍ A VÝSLEDKY V této kapitole bude podrobně popsán postup zpracování naměřených dat, budou zde uvedeny vzorce potřebné pro pomocné výpočty, tabulky s výslednými hodnotami, porovnání délek a porovnání směrodatných odchylek. Pro zpracování naměřených dat byly použity programy Cyclone, Geomagic, Excel a Groma. V programu Excel a Groma byla zpracována úloha Měření oměrných. Jednalo se o výpočet prostorových souřadnic zaměřených bodů na památníku. V programu Cyclone byly částečně zpracovány úlohy Opakovatelnost a Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování. Mračna bodů byla očistěna od bodů, které netvořily skenovaný objekt. Tím byla data předpřipravena. Následné zpracování mračen bodů proběhlo v programu Geomagic, kde byly provedeny potřebné úkony pro tvorbu síťového modelu skenovaného objektu. 4.1 Měření oměrných Toto doplňkové měření bylo zpracováno v programu Excel a Groma. Výpočet proběhl v místní souřadnicové soustavě (dále ss). Počátek ss byl odsazen od bodu D, kladná osa +X je rovnoběžná se spojnicí bodů CD, a na ni kolmo osa +Y. Bod D má souřadnice D[1000; 5000;100]. Souřadnice bodu C byly dopočteny z naměřených délek na hodnotu C[1000; 5017,155] (Obrázek 7). V programu Excel byl proveden výpočet na redukci směrů. Pomocí těchto redukovaných směrů a souřadnic bodů C a D byly v programu Groma dopočítány polohové souřadnice zbylých bodů A a B. Z naměřených převýšení byla spočtena průměrná převýšení, která byla následně přičtena k z-ové souřadnici známého bodu, čímž jsme získali hodnotu souřadnic Z. Souřadnice podrobných bodů byly spočteny protínáním vpřed z úhlů [7]., přičemž délky mezi jednotlivým stanovisky a podrobnými body byly spočteny pomocí sinové věty. 18
19 Obrázek 7: Zvolená souřadnicová soustava Vzorce na protínání z úhlů (Obrázek 8): Y P X P = Y + D = X + D ( Y Y ) cot g ω + ( X X ) C D B C D cot g ω + cot g ω A ( X X ) cot g ω ( Y Y ) C D B C D cot g ω + cot g ω A B B ;, kde: Y P, X P určované souřadnice, Y D, X D..známé souřadnice. Pro kontrolu byly souřadnice vždy vypočteny i z druhého bodu základny, a to podle upravených vzorců: Y P ( Y Y ) cot g ω ( X X ) + = YC + cot g ω + cot g ω C D A C D A B ; X P ( X X ) cot g ω ( Y Y ) = X C + cot g ω + cot g ω C D A C D A B. 19
20 kde: Y P, X P.určované souřadnice, Y C, X C.známé souřadnice. Výsledné souřadnice X a Y jsou uvedeny v Tabulce 1. Obrázek 8: Protínání z úhlů Obrázek 9: Sinová věta 20
21 Vzorce pro sinovou větu (Obrázek 9): a b c c = = a = sinα sinα sin β sinγ sinγ c b = sin β sinγ. Převýšení podrobných bodů bylo spočítáno z naměřených zenitek a příslušných délek (Obrázek 10): a tg z = h = tg z a 1 1 h1 tg z1 b = h = b 2 2 h 2 tg z 2,, kde: a,b délky ze sinové věty, h 1,2 převýšení, z 1,2 zenitová vzdálenost. Tímto způsobem byla zjištěna jednotlivá převýšení podrobných bodů. Z výše uvedených vzorců a obrázků je zřejmé, že pro každý bod byla zjištěna 2 převýšení (z obou bodů základny), tzn., že máme 2 z-ové souřadnice podrobných bodů. Výsledná souřadnice Z je aritmetickým průměrem těchto dvou hodnot (viz Tabulka 1). Obrázek 10: Převýšení 21
22 Podrobné body Souřadnice [m] Délky [m] Převýšení [m] Souřadnice Z [m] Y X a b z A z B z C z D Z 1 Z 2 Rozdíl[mm] Z Ø , ,4239 8,5766 5,8619 1,7839 2, , ,4163 0,4 101, , ,9776 8,1757 6,2634 1,7905 2, , ,4211 2,3 101, , ,0525 8,3465 6,5473 1,7903 2, , ,4217 1,4 101, , ,9891 7,9778 6,0773 2,3952 2, , ,0260 2,1 102, , ,8967 9,1168 5,6878-1,4226-0, , ,2089 1,4 98, , , ,8304 5,6363-0,8023-0, , ,8295 1,1 98, , , ,1712 5,9139-0,3402 0, , ,2919 0,8 99, , , ,9793 5,6042-0,7961-0, , ,8360 0,8 98, , , ,2422 5,6398-1,0464-0, , ,5857 0,8 98, , , ,5433 5,7071-1,1584-0, , ,4732 1,2 98, , , ,7633 6,1552-1,2505-0, , ,3805 1,9 98, , ,1071 8,6462 9,7160 0,1268-0, , ,3069-0,4 99, , ,0279 8,6846 9,7721 1,4335 1, , ,6134-0,2 100, , ,0272 8, ,1843 1,4269 1, , ,6088-2,2 100, , ,9710 7, ,7746 2,8038 2, , ,9824 1,1 101, , , ,8288 8,1414 2,4316 2, , ,0198 1,7 102, , , ,8892 8,8591 0,9986 0, , ,5889-0,4 100, , , , ,0661-0,7593-1, , ,8299 0,6 98, , , , ,6612-0,3053-0, , ,2846 0,0 99, , ,8788 9, ,4945-0,7151-1, , ,8749-0,1 98, , ,2404 9, ,0294-1,1177-1, , ,4730-0, 9 98, , ,8507 8, ,2166-1,2112-1, , ,3795-0, 7 98,3791 Tabulka 1: Výsledné souřadnice YXZ
")



23 Po zjištění prostorových souřadnic všech bodů, byly mezi zvolenými body spočteny prostorové délky podle vzorce: kde: ( ) ( ) ( ) AB = B A + B A + B A d Y Y X X Z Z d AB.určovaná délka, Y A X A Z A.prostorové souřadnice počátečního bodu určované délky, Y B X B Z B. prostorové souřadnice koncového bodu určované délky., Tyto délky pak byly porovnány s délkami měřenými pásmem a s délkami změřenými přímo na vytvořeném 3D modelu v programu Geomagic (Kapitola 4.3.5, Tabulka 16 19) Obrázek 11: Podrobné body
24 Obrázek 12: Podrobné body 24


25 4.2 Opakovatelnost Všech sedm měření bylo nejprve předpřipraveno (očištěno) v programu Cyclone a další úpravy byly provedeny v programu Geomagic Zpracování v programu Cyclone Po otevření každého ze sedmi měření, byla pomocí nástroje Ohrada (Fence) vybrána oblast se zaměřeným objektem. Byla vytvořena kopie vybrané části měření a v této kopii proběhla úprava mračen, tzn. očištění mračna od bodů, které netvoří skenovaný objekt (tráva, okolní budovy, auta) (Obrázek 13,14). Obrázek 13: Použití nástroje Ohrada Obrázek 14: Mračno před a po očištění 25
26 Export dat Po očištění všech mračen byl proveden export souřadnic bodů ve formátu txt. Parametry exportu: Export: ASCII file format: sloupce 3 počet des. míst 3 oddělovač mezera jednotky metry Tímto způsobem bylo vyexportováno sedm *.txt souborů se souřadnicemi bodů. Následující úpravy mračen bodů probíhaly v programu Geomagic studio Zpracování v programu Geomagic Po načtení *.txt souboru každého měření byla mračna bodů upravena podle návodu [8]. Na takto opravených bodech byla vygenerována trojúhelníková síť (bodová fáze). Tato síť byla upravena do výsledného tvaru (polygonová fáze) Bodová fáze Následující postup byl použit pro všech sedm mračen. Číselné hodnoty jednotlivých úprav a změny počtu bodů v průběhu těchto úprav jsou uvedeny v Tabulce 2. Načtení bodů Načtení dat do programu Geomagic proběhlo příkazem File Import a výběrem příslušného mračna. 26
27 Výběr odlehlých oblastí (Select Disconnected) Tato funkce vybere odlehlé oblasti, ale pokud je důkladně provedeno manuální mazání, tak tato funkce žádné odlehlé oblasti nenajde. Funkci najdeme na panelu nástrojů. Nastavení je možné měnit hodnotami Separation a Size. Separation byla nastavena na hodnotu medium (odlehlé body, které spolu navzájem úzce sousedí, jsou považovány za odlehlé), hodnota Size na hodnotu 5 (procentuální vyjádření odlehlých bodů z celkového počtu bodů). Nebyly nalezeny žádné odlehlé oblasti. Výběr odlehlých bodů (Select Outliers) Tato funkce najde body, které jsou odlehlé z důvodu například hrubých chyb nebo velkého šumu. Účinnost můžeme měnit volbou Sensitivity (nízká hodnota limituje výběr nejodlehlejších bodů; vysoká hodnota zahrne širší oblast odlehlostí). V tomto případě byla ponechána defaultní hodnota %. Vybrané body byly smazány. Snížení šumu (Reduce Noise) Tato funkce byla použita pro snížení šumu. Šum může zaoblit ostré hrany, nebo hladké křivky zostřit. Z důvodu, že je tuto funkci potřeba používat velmi opatrně, byly hodnoty funkcí Smoothness level (agresivita vyhledávání bodů), Iterations (počet opakování) nastaveny na minimální hodnoty a Deviation Limit (maximální vzdálenost, o kterou může být bod posunut) na hodnotu 0,5 mm. Zvolena byla forma Free-form Shapes (redukce je provedena s ohledem na povrchové zakřivení). Vypovídající hodnotou je Standard deviation, která popisuje rozptyl vzdáleností. Sjednocení vzorkování (Uniform Sample) Tato funkce provede sjednocení vzorkování celého mračna s vyjímkou částí s velkou křivostí, tzn. že můžeme snížit počet bodů mračna při zachování všech detailů. Po spuštění funkce navrhne průměrnou vzdálenost bodů Absolute spacing (požadovaná vzdálenost v místech s malou křivostí). Tato hodnota byla přenastavena na stejnou hodnotu, jako byla hustota skenování. Hodnota Curvature Priority byla ve všech případech nastavena na maximální hodnotu. 27
28 Generace trojúhelníkové sítě (Wrap) Po provedení předchozích úprav mohla být vygenerována trojúhelníková síť. Wrap Type byla zvolena Surface (standardní síť pro většinu bodových objektů, zvláště velkých objektů) Polygonová fáze V programu Geomagic má každý trojúhelník sítě normálu, která určuje jeho přední a zadní stranu. Přední strana je konstantně vybarvena modře, zadní strana žlutě. V několika případech se stalo, že část památníku měla obrácené normály. V tom případě byla část sochy oddělena od modelu a otevřena v novém objektu, ve kterém proběhla oprava (Polygons Flip Normals) Oddělení části sochy bylo provedeno jejím označením a příkazem: Edit Selected to Object Cut and paste. Poté byla oddělená část opět připojena k původnímu modelu funkcí Merge Polygons Object. Vytvořené trojúhelníkové sítě měly na povrchu nevyplněné plochy, neboli díry. Ty bylo nutno před dalšími úpravami nejprve vyplnit a vytvořit tak vodotěsný model. Vyplnění otvorů (Fill Holes) Touto funkcí byly vyhledány všechny otvory v síti a následně vyplněny. Před samotným vyplněním bylo nutné využít další nástroje jako: Vyplň částečně (Fill Partial) nástroj, který po nadefinování okraje neuzavřeného otvoru tento otvor vyplní Vyčisti (Clean Up) vymaže vybrané trojúhleníky Vyhlaď (Relax) Nástroj k odstranění šumu trojúhelníkové sítě, jejíž efekt můžeme opticky posoudit a regulovat. Nastavení můžeme regulovat pomocí hodnot Smoothness Level a Strengh. Úroveň vyhlazení byla nastavena na střední hodnotu a síla na minimum. 28
29 Jedním z vystupů je i hodnota Standard deviation, která popisuje směrodatnou odchylku všech posunutých vrcholů. Výsledky jsou uvedeny v Tabulce 2. Snížení počtu polygonů (Decimate Polygons) Obdoba nástroje Uniform Sample v bodové fázi. Nastavujeme cílový počet trojúhelníků nebo procento z aktuálního počtu. Pro zachování všech trojúhelníků na hranách a v dalších místech s vysokou křivostí, nastavujeme hodnotu Curvature priority na maximum. Konečný počet trojúhelníků byl nastaven na 50%. Tento postup byl zopakován u všech sedmi skenů. V tuto chvíli byly již provedeny všechny potřebné úpravy trojúhelníkových sítí, aby mohly být znázorněny grafické rozdíly. 29
30 počet bodů reduce noise [mm] počet trojúhelníků relax [mm] OPAKOVATELNOST model 1 model 2 model 3 model 5 model 6 model 7 model 8 celkem po select outliers po uniform sample max distance 0,5 0,5 0,5 0,5 0,5 0,5 0,5 average distance 0,44 0,44 0,44 0,44 0,43 0,44 0,44 standard deviation 0,13 0,13 0,13 0,13 0,14 0,13 0,13 po wrap po fill holes po decimate polygons max distance 15,02 10,46 9,77 10,91 10,21 8,79 9,59 average distance 0,26 0,26 0,26 0,21 0,2 0,2 0,26 standard deviation 0,31 0,31 0,31 0,27 0,27 0,26 0,31 Tabulka 2: Průběžné hodnoty ze zpracování úlohy Opakovatelnost 30
31 4.2.3 Grafické znázornění rozdílů Porovnání se provádí funkcí 3D Compare v menu Analysis. Porovnávány byly : všechny sítě mezi sebou tzn. všechny možné kombinace, které bylo možno porovnat jedna síť : síť č. 1 v různých úpravách - Wrap 1 - upravena klasickým způsobem (bodová fáze, Wrap, polygonová fáze) - ReWrap 1 - upravena klasickým způsobem (bodová fáze, Wrap, ReWrap, polygonová fáze) - Mračno 1 - původní očištěné mračno č. 1 Před každým porovnáním byla jedna síť zvolena jako referenční, tzn. že k této síti byly porovnávány zbylé sítě. Hodnota Max Deviation byla nastavena vždy na 20 mm. Je to hodnota, která specifikuje největší odchylku, která může být oznámena. Pokud jakákoliv oblast testovaného objektu je za tímto maximem, oznamovací okno oznámí, že je x% bodů příliš vzdáleno, aby mohly být použity do výpočtu. Hodnoty nad 20 mm jsou považovány za odlehlá měření a proto jsou vyloučeny, aby negativně neovlivňovaly výpočet směrodatné odchylky. Výstupními hodnotami po provedeném porovnání jsou Maximum Distance (největší nalezené odchylky ; žádná ale nepřekračuje hodnotu Max Deviation), Average Distance (průměrné nalezené odchylky) a Standard Deviation σr (směrodatná odchylka všech odchylek). Barevné znázornění rozdílů Pomocí funkce 3D Compare bylo vygenerováno barevné vyjádření rozdílů. Změnami hypsometrické stupnice (5 barev) byly pro každý rozdílový model vyhledány krajní hodnoty intervalů tj. středový interval (obsahující 95% vypočtených rozdílů), okrajový interval (rozšířený o 0,5 mm), postranní interval ( zahrnující všechny větší odchylky). Ukázka bude uvedena v příloze č. 1. Z následujících tabulek je zřejmé, jak byly modely mezi sebou porovnávány, a jakých rozdílů a směrodatných odchylek bylo dosaženo. 31
32 Porovnání všech sítí Reference Test Max. distance [m] Average distance [m] Standard deviation σ r positive negative positive negative ø [mm] 2 0,02-0,02 0,0007-0,0005 0,0002 0,8 3 0,02-0,02 0,0008-0,0005 0,0004 0, ,02-0,02 0,0011-0,0005 0,0009 0,9 6 0,02-0,02 0,0013-0,0006 0,0012 0,9 7 0,02-0,02 0,0009-0,0004 0,0007 0,9 8 0,02-0,02 0,0009-0,0004 0,0006 0,8 3 0,02-0,02 0,0006-0,0005 0,0002 0,8 5 0,02-0,02 0,0009-0,0004 0,0006 0, ,02-0,02 0,0011-0,0005 0,0010 0,9 7 0,02-0,02 0,0009-0,0005 0,0005 0,9 8 0,02-0,02 0,0008-0,0005 0,0004 0,9 5 0,02-0,02 0,0008-0,0005 0,0004 0, ,02-0,02 0,0010-0,0005 0,0008 0,8 7 0,02-0,02 0,0007-0,0005 0,0003 0,8 8 0,02-0,02 0,0007-0,0006 0,0002 0,9 6 0,02-0,02 0,0006-0,0004 0,0003 0, ,02-0,02 0,0005-0,0006-0,0002 0,7 8 0,02-0,02 0,0005-0,0007-0,0003 0, ,02-0,02 0,0004-0,0007-0,0005 0,6 8 0,02-0,02 0,0004-0,0008-0,0006 0, ,02-0,02 0,0005-0,0006-0,0001 0,7 Tabulka 3: Opakovatelnost - porovnání všech sítí Porovnání jedné sítě počet bodů reduce noise [mm] počet trojúhelníků relax [mm] WRAP 1 X REWRAP 1 WRAP 1 REWRAP 1 celkem po select outliers po uniform sample max distance 0,5 0,5 average distance 0,44 0,44 standard deviation 0,13 0,13 po wrap po fill holes po decimate polygons max distance 15,02 10,08 average distance 0,26 0,26 standard deviation 0,31 0,31 Tabulka 4: Opakovatelnost parametry vytvořených sítí 32
33 Max. distance [m] Average distance [m] Standard Reference Test positive negative positive negative ø deviation σ r [mm] ReWrap 1 0,02-0,02 0,0000-0, ,3 Wrap 1 Mračno 1 0,02-0,02 0,0014-0, ,8 ReWrap 1 Mračno 1 0,02-0,02 0,0014-0, ,8 Tabulka 5: Opakovatelnost - porovnání jedné sítě Porovnání směrodatných odchylek Směrodatné odchylky určené programem Geomagic byly porovnány s odchylkami spočtenými z intervalů, určených hypsometrickou stupnicí (viz kapitola 4.2.3) Směrodatná odchylka jednoho měření σ 0 byla vypočtena podle vzorce: m m = up 2 σ 0 σ 0 =, up 2 kde: m hranice intervalu, up koeficient spolehlivosti. Reference Test Standard deviation σ r [mm] interval,obsahující 95% odchylek Standard Deviation spočtená σ 0 [mm] 2 0,80 0,0015-0,0015 0,53 3 0,90 0,0020-0,0020 0, ,90 0,0025-0,0025 0,88 6 0,90 0,0025-0,0025 0,88 7 0,90 0,0020-0,0020 0,71 8 0,80 0,0020-0,0020 0,71 3 0,80 0,0015-0,0015 0,53 5 0,80 0,0020-0,0020 0, ,90 0,0025-0,0025 0,88 7 0,90 0,0015-0,0015 0,53 8 0,90 0,0020-0,0020 0,71 5 0,80 0,0015-0,0015 0, ,80 0,0020-0,0020 0,71 7 0,80 0,0015-0,0015 0,53 8 0,90 0,0015-0,0015 0,53 6 0,70 0,0015-0,0015 0, ,70 0,0015-0,0015 0,53 8 0,80 0,0015-0,0015 0, ,60 0,0015-0,0015 0,53 8 0,70 0,0020-0,0020 0, ,70 0,0015-0,0015 0,53 Tabulka 6: Porovnání všech sítí 33

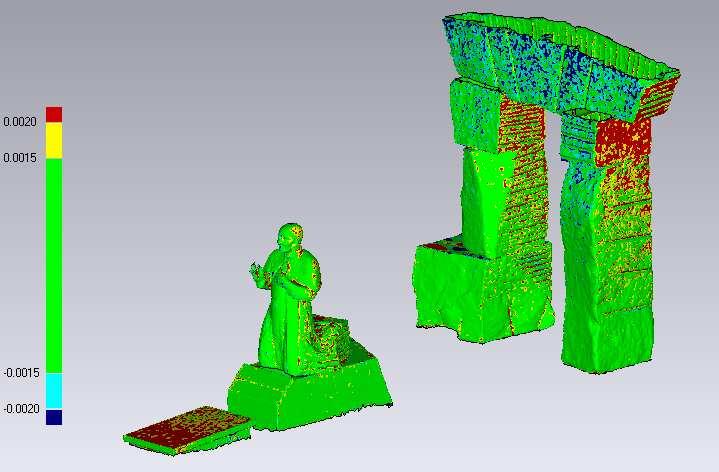
34 4.3 Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování Pro tento experiment bylo vytvořeno 32 skenů, zachycujících skenovaný objekt z osmi různých stanovisek (Obrázek 5). Všechna měření byla nejprve očištěna v programu Cyclone, čímž byla připravena pro následný export do *.txt souborů. Ty byly načteny do programu Geomagic. Pro každou ze čtyř hustot byly vytvořeny modely ze čtyř rohových nebo všech osmi stanovisek. Celkem tedy 8 modelů Zpracování v programu Cyclone Průběh zpracování je obdobný jako v úloze Opakovatelnost. Byla vytvořena kopie každého z 32 měření a v této kopii proběhlo očištění mračen od bodů, které nebyly součástí vyhodnocovaného objektu. Poté bylo vyexportováno 32 txt souborů obsahujících souřadnice bodů. Export dat Parametry exportu: Export: ASCII file format: sloupce 3 počet des. míst 3 oddělovač mezera jednotky metry Obrázek 15: Porovnání mračna o hustotě skenování 5mm x 5mm a 50mm x 50mm 34
35 4.3.2 Zpracování v programu Geomagic Registrace Registrace sloučí měření z jednotlivých stanovisek do jediného souřadnicového systému. Skládá se ze dvou kroků: - manuální registrace, - globální registrace. Manuální registrace Jedná se o registraci dvou mračen s překrývajícími se oblastmi. Je založena na definování identických bodů překrývajících se oblastí dvou skenů. Zvolit můžeme tzv. 1-point Registration, kdy volíme pouze jeden identický bod, nebo tzv. n-point Registration, kdy můžeme volit tři až devět identických bodů. Po spuštění programu Geomagic byly načteny všechny textové soubory obsahující data, pro vytvoření modelu v určité hustotě. Proces registrace byl spuštěn pomocí příkazu Tools Registration Manual Registration. Po otevření dialogového okna byla zvolena možnost n-point Registration, a dále bylo jedno mračno zvoleno jako Fixed a další jako Floating. Při registraci je pracovní okno rozděleno do tří podoken s názvy Fixed, Floating a Isometric. V podoknech Fixed a Floating jsou zobrazena mračna, která chceme registrovat a v podokně Isometric jsou obě mračna ve vzájemné poloze vůči sobě. Následoval samotný proces registrace, při kterém byly vkládány identické body do obou mračen. Výběr identických bodů byl prováděn velmi pečlivě. Po výběru bodů byl spuštěn proces registrace. Po vizuální kontrole kvality registrace v podokně Isometric následovalo připojení dalšího mračna přes volbu Next. Po připojení posledního mračna byla registrace dokončena volbou tlačítka OK. Pro zlepšení kvality registrace byla provedena globální registrace. 35
36 Globální registrace Proces registrace je založen na minimalizaci vzdáleností překrytových oblastí. Globální registrace byla spuštěna příkazem Tools Global Registration. Bylo ponecháno defaultní nastavení, tzn. hodnota Tolerance (průměrná odchylka mezi body dvou mračen, která by zastavila proces registrace) byla nastavena na 0 a hodnota Max Iterations na 100. Pouze položka Simple Size (počet bodů z každého mračna, použitých pro registraci) byla nastavena na hodnotu (maximum, které můžeme v programu Geomagic Studio 10 nastavit) Po manuální a globální registraci jednotlivých mračen a sloučení těchto mračen do jednoho objektu (Merge Points Objects) následoval obdobný postup jako v kapitole 4.2.2: Bodová fáze Načtení bodů Výběr odlehlých oblastí (Select Disconnected) Výběr odlehlých bodů (Select Outliers) Snížení šumu (Reduce Noise) Sjednocení vzorkování (Uniform Sample) Generace trojúhelníkové sítě (Wrap) Polygonová fáze Vyplnění otvorů (Fill Holes) Počet děr Počet Hustota stanovisek 0,5 x 0,5 1 x 1 2 x 2 5 x Tabulka 7: Tvorba modelů - počet děr Vyhlaď (Relax) Snížení počtu polygonů (Decimate Polygons) Tímto postupem bylo vytvořeno 8 modelů a následovalo vytvoření rozdílů těchto modelů. 36
37 Modely vytvořené z rohových stanovisek Hustota Rohová stanoviska 0,5 x 0,5 1 x 1 2 x 2 5 x 5 globální average distance 5,7 8,2 13,8 33,9 registrace [m] standard deviation 10,6 9,2 9,5 19,5 počet bodů reduce noise [m] počet trojúhelníků relax [m] po glob. registraci po select outliers po uniform sample max distance 0,5 0,5 0,5 0,5 average distance 0,45 0,46 0,47 0,48 standard deviation 0,12 0,11 0,10 0,08 wrap fill holes decimate polygons max distance 11,48 33,13 25,2 41,51 average distance 0,22 0,30 0,59 1,91 standard deviation 0,26 0,41 0,85 2,37 Tabulka 8: Modely tvořené z rohových stanovisek - zpracování Modely vytvořené ze všech stanovisek Hustota Všechna stanoviska 0,5 x 0,5 1 x 1 2 x 2 5 x 5 globální average distance 4,4 7,2 12,5 28,4 registrace [m] standard deviation 6,3 6,6 8,5 18,1 po glob. registraci počet bodů po select outliers reduce noise [m] počet trojúhelníků relax [m] po uniform sample max distance 0,5 0,5 0,5 0,5 average distance 0,45 0,46 0,47 0,48 standard deviation 0,12 0,11 0,10 0,08 wrap fill holes decimate polygons max distance 11,46 15,80 20,78 33,18 average distance 0,16 0,22 0,41 1,31 standard deviation 0,22 0,32 0,58 1,78 Tabulka 9: Modely tvořené ze všech stanovisek - zpracování 37
38 4.3.3 Grafické znázornění rozdílů Porovnání bylo provedeno pomocí funkce 3D Compare. Hodnota Max Deviation byla nastavena na 20 mm nebo 50 mm, podle toho, jaké hustoty byly testovány. Pokud v testované dvojici byl model o hustotě 50 mm x 50 mm, byla hodnota Max Deviation nastavena na 50 mm, protože v opačném případě program oznámil, že 12-18% bodů je za touto povolenou hranicí a body proto nebudou zahrnuty do výpočtu. Hypsometrická stupnice byla nastavována stejně jako v úloze Opakovatelnost (viz kapitola 4.2.3) Ukázka je uvedena v příloze č. 2. Rozdíly modelů ze všech stanovisek Reference 0,5 x 0,5 1 x 1 Test Max. distance [m] Average distance [m] Standard deviation σ r positive negative positive negative ø [mm] 1 x1 0,02-0,02 0,0012-0,0010 0,0001 1,5 2 x 2 0,02-0,02 0,0025-0,0019 0,0004 3,0 5 x 5 0,05-0,05 0,0053-0,0048 0,0009 7,0 2 x 2 0,02-0,02 0,0018-0,0015 0,0004 2,5 5 x 5 0,05-0,05 0,0049-0,0046 0,0009 6,8 2 x 2 5 x 5 0,02-0,02 0,0038-0,0038 0,0005 5,3 Tabulka 10: Porovnání modelů tvořených ze všech stanovisek Rozdíly modelů z rohových stanovisek Reference 0,5 x 0,5 1 x 1 Test Max. distance [m] Average distance [m] Standard deviation σ r positive negative positive negative ø [mm] 1 x1 0,02-0,02 0,0014-0, ,0 2 x 2 0,02-0,02 0,0032-0,0028 0,0003 4,2 5 x 5 0,05-0,05 0,0073-0,0105-0, ,8 2 x 2 0,02-0,02 0,0025-0,0024 0,0004 3,4 5 x 5 0,05-0,05 0,0071-0,0105-0, ,6 2 x 2 5 x 5 0,02-0,02 0,0051-0,0080-0,0023 8,3 Tabulka 11: Porovnání modelů tvořených z rohových stanovisek Porovnání hustot Hustota Reference Test Max. distance [m] Average distance [m] Standard deviation σ r positive negative positive negative ø [mm] 0,5 x 0,5 roh vše 0,02-0,02 0,0042-0,0010 0,0028 3,8 1 x1 roh vše 0,02-0,02 0,0034-0,0019 0,0029 2,1 2 x 2 roh vše 0,02-0,02 0,0047-0,0017 0,0030 4,5 5 x 5 roh vše 0,05-0,05 0,0138-0,0045 0, ,3 Tabulka 12: Porovnání modelů stejných hustot 38
39 4.3.4 Porovnání směrodatných odchylek Směrodatné odchylky σr určené programem Geomagic byly porovnány s odchylkami σ 0 spočtenými z intervalů, určených hypsometrickou stupnicí (viz kapitola 4.2.3) Modely ze všech stanovisek Reference Test Standard deviation σ r [mm] Interval obsahující 95% odchylek Standard Deviation spočtená σ 0 [mm] 1 x1 1,5 0,0025-0,0025 1,8 0,5 x 0,5 2 x 2 3,0 0,0040-0,0040 2,8 5 x 5 7,0 0,0250-0, ,7 1 x 1 2 x 2 2,5 0,0040-0,0040 2,8 5 x 5 6,8 0,0120-0,0120 8,5 2 x 2 5 x 5 5,3 0,0100-0,0100 7,1 Tabulka 13: Porovnání směrodatných odchylek Modely z rohových stanovisek Reference Test Standard deviation σ r [mm] Interval obsahující 95% odchylek Standard Deviation spočtená σ 0 [mm] 1 x1 2,0 0,0030-0,0030 2,1 0,5 x 0,5 2 x 2 4,2 0,0080-0,0080 5,7 5 x 5 11,8 0,0300-0, ,2 1 x 1 2 x 2 3,4 0,0070-0,0070 4,9 5 x 5 11,6 0,0350-0, ,7 2 x 2 5 x 5 8,3 0,0230-0, ,3 Tabulka 14: Porovnání směrodatných odchylek Modely stejných hustot Hustota Reference Test Standard deviation σ r [mm] Interval obsahující 95% odchylek Standard Deviation spočtená σ 0 [mm] 0,5 x 0,5 roh vše 3,8 0,0090-0,0090 3,2 1 x1 roh vše 2,1 0,0050-0,0050 1,8 2 x 2 roh vše 4,5 0,0200-0,0200 7,1 5 x 5 roh vše 12,3 0,0300-0, ,6 Tabulka 15:Porovnání směrodatných oddchylek 39
40 4.3.5 Porovnání délek V kapitole 4.1 byl popsán výpočet prostorových délek mezi podrobnými body na památníku. Jak již bylo řečeno, tyto délky byly porovnány s délkami zjištěnými pásmem, s délkami změřenými na vytvořených 3D modelech a dále také s délkami změřenými na očištěných mračnech. Nejprve byly porovnány vybrané délky mezi body, mezi kterými byla změřena oměrná míra pásmem. Tyto délky byly dále porovnány s délkami zjištěnými na prostorovém modelu (vytvořený ze všech stanovisek, o hustotě 5 mm x 5 mm) a s délkami změřenými na odpovídajícím mračně bodů (hustota 5 mm x 5 mm). Také byla vypočtena procentuální změna délky na modelu od délky spočtené ze souřadnic. Počáteční Koncový Délka [m] bod bod ze souřadnic oměrka model mračno změna [%] ,089 3,092 3,089 3,090 0, ,393 1,392 1,391 1,392 0, ,394 1,392 1,390 1,396 0, ,896 0,894 0,878 0,896 1, ,654 1,654 1,644 1,654 0, ,896 0,894 0,881 0,894 1, ,960 0,985 0,964 0,969-0,40 Tabulka 16: Porovnání délek Počáteční Délka [m] Rozdíly [mm] bod Koncový bod ze souřadnic oměrka model mračno , , , , , , , Tabulka 17: Porovnání délek 40
41 Porovnání délek na modelech vyvořených ze všech stanovisek Počáteční Koncový Délka [m] 5 mm x 5 mm 20 mm x 20 mm bod bod ze souřadnic model mračno model mračno 2 3 0,335 0,335 0,332 0,357 0, ,668 0,665 0,668 0,660 0, ,309 1,312 1,308 1,330 1, ,514 0,515 0,511 0,505 0, ,830 0,831 0,834 0,838 0, ,786 1,784 1,787 1,788 0,782 Tabulka 18:Porovnání délek Počáteční Koncový Rozdíly [mm] 5 mm x 5 mm 20 mm x 20 mm bod bod ze souřadnic model mračno model mračno 2 3 0, , , , , , Tabulka 19:Porovnání délek Počáteční Koncový Délka [m] 10 mm x 10 mm 50 mm x 50 mm bod bod ze souřadnic model mračno model mračno 2 3 0,335 0,335 0,335 0,369 0, ,668 0,664 0,663 0,657 0, ,309 1,318 1,306 1,341 1, ,514 0,510 0,514 0,510 0, ,830 0,835 0,830 0,838 0, ,786 1,788 1,785 1,781 1,821 Tabulka 20: Porovnání délek Délka [m] Rozdíly [mm] Počáteční Koncový 10 mm x 10 mm 50 mm x 50 mm bod bod ze souřadnic model mračno model mračno 2 3 0, , , , , , Tabulka 21:Porovnání délek 41
42 Porovnání délek na modelech vyvořených z rohových stanovisek Počáteční Délka [m] 5 mm x 5 mm 20 mm x 20 mm bod Koncový bod ze souřadnic model mračno model mračno 2 3 0,335 0,336 0,333 0,360 0, ,668 0,664 0,663 0,655 0, ,309 1,311 1,309 1,333 1, ,514 0,511 0,513 0,500 0, ,830 0,83 0,830 0,844 0, ,786 1,787 0,786 1,785 1,777 Tabulka 22:Porovnání délek Počáteční Rozdíly [mm] 5 mm x 5 mm 20 mm x 20 mm bod Koncový bod ze souřadnic model mračno model mračno 2 3 0, , , , , , Tabulka 23: Porovnání délek Počáteční Koncový Délka [m] 10 mm x 10 mm 50 mm x 50 mm bod bod ze souřadnic model mračno model mračno 2 3 0,335 0,332 0,335 0,372 0, ,668 0,666 0,663 0,628 0, ,309 1,323 1,306 1,400 1, ,514 0,506 0,514 0,505 0, ,830 0,836 0,830 0,864 0, ,786 1,781 1,785 1,777 1,821 Tabulka 24: Porovnání délek Počáteční bod Rozdíly [mm] Koncový bod 10 mm x 10 mm 50 mm x 50 mm ze souřadnic model mračno model mračno 2 3 0, , , , , , Tabulka 25: Porovnání délek 42
43 5 ZHODNOCENÍ VÝSLEDKŮ 5.1 Opakovatelnost Z experimentu Opakovatelnost, kdy byl 7x naskenován jeden objekt při změně výchozích podmínek skenování, vyplývá, že opakováním měření při stejné pozici skeneru se výrazně nemění výsledný vytvořený model. Při porovnání dvou modelů se průměrné vzdálenost těchto modelů pohybují většinou pod hranicí 1 mm, největší odchylka byla nalezena 1,2 mm. Dále bylo zjištěno, že použití funkce Rewrap (přesíťování) nemá na výsledný model vliv a tento model se neliší od modelu vytvořeném pouze s funkcí Wrap. Při porovnání původního mračna a z něho vytvořené trojúhelníkové sítě bylo zjištěno, že se poloha původních bodů změní o ± 1,5 mm. Směrodatná odchylka rozdílu byla programem Geomagic spočtena lepší než 1 mm. 5.2 Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování Porovnáním modelů všech hustot, vytvořených ze všech stanovisek bylo zjištěno, že se zmenšující se hustotou skenování se zvětšuje vzdálenost povrchů obou testovaných modelů, a to od 1 mm do 5 mm. Povrchy obou modelů se vzájemně prolínaly. Směrodatná odchylka σr určení rozdílů roste s klesající hustotou. Nabývá hodnot od 1,5 mm do 7 mm. Viz Tabulka 10. Pro modely tvořené z rohových stanovisek byly zjištěny vzdálenosti povrchů modelů od 1,4 mm do 10 mm. Směrodatná odchylka σr určení rozdílu nabývá hodnot od 2 mm do 11,8 mm. Viz Tabulka 11. Při porovnání modelů ze všech stanovisek s modely z rohových stanovisek byly zjištěny rozdíly povrchů od 2 mm do 4,5 mm, přičemž nejlepší shody dosáhly modely o hustotě 10 mm x 10 mm. Také směrodatná odchylka rozdílu byla lepší než u modelů vyšší hustoty, viz Tabulka 12. Při porovnávání délek byla jako správná délka uvažována délka ze souřadnic a s touto délkou byly porovnány ostatní délky (oměrná, z modelu, z mračna). Jen malé rozdíly dávala délka zjištěná z modelu o hustotě 5 mm x 5 mm. Tento model má i přes použití funkce Relax nejlépe vymodelované hrany, míra zaoblení hran není tolik výrazná, a model tudíž nejvíce odpovídá skutečnému stavu skenovaného objektu. 43
44 Délky zjištěné z modelů o hustotě 10 mm x 10 mm se liší od délek ze souřadnic do 10 mm, délky z modelů 20 mm x 20 mm jsou rozdílné maximálně o 25 mm. Modely o hustotě 50 mm x 50 mm už mají velmi výrazně zaoblené hrany a je tedy poměrně obtížné na nich jednozněčně identifikovat rohové body. Délky se tedy liší výrazněji a to o 20 mm až 40 mm. Největší zjištěný rozdíl je 90 mm. Ještě menších rozdílů bylo dosaženo, při porovnání délek ze souřadnic a délek změřených přímo na mračnech bodů. V těchto mračnech je poměrně snadné identifikovat hranu či roh objektu. Platí to zejména pro mračna o hustotě 5 mm x 5 mm a 10 mm x 10 mm. Tyto rozdíly jsou většinou v rozmezí 1 2 mm, maximálně 5 mm. U mračen o hustotě 20 mm x 20 mm jsou tyto rozdíly do 10 mm. U mračna o hustotě 50 mm x 50 mm už rozdíly nabývají hodnot 20 mm 60 mm. Z vypočtených hodnot uvedených v tabulkách je patrné, že nejvhodnější je měřit délku přímo na mračnu naskenovaném s vyšší hustotou (tj. 5 mm x 5 mm, 10 mm x 10 mm). Tato mračna, narozdíl od modelů, nejsou zatížena vlivem úprav při zpracování, a mračno tedy nejlépe odpovídá skenovanému objektu. Je tedy vhodnější než z něho vytvořený model. Tento závěr platí ovšem pouze pro mračna vyšších hustot. Pro nižší hustoty skenování už to ovšem neplatí, protože vlivem většího rozestupu bodů se mohou ztrácet hrany objektu. 44
45 6 ZÁVĚR Zadáním této diplomové práce bylo testování skenovacího systému Leica HDS 3000, sběr dat potřebných pro testování, zpracování a vyhodnocení těchto dat. Cílem bylo zjistit, zda změny nastavení skenování ovlivňují přesnost modelování a zda tuto přesnost ovlivňuje i rozmístění stanovisek a hustota skenování. Skenovaným objektem byl památník Kardinála Josefa Berana. Část naměřených dat pro tuto práci byla převzata od Ing. Jany Pospíšilové, se kterou jsem při zpracování úzce spolupracovala. Druhé části měření jsem se osobně účastnila. Zpracování dat, po domluvě s Ing. Pospíšilovou a vedoucím práce, probíhalo stejným způsobem, byly použity stejné nástroje a postupy. Výsledné hodnoty zpracování a závěrů budou předány Ing. Pospíšilové, která tyto hodnoty použije ve své disertační práci, kde porovná vliv zpravovatele na výslednou přesnost modelování. (zda 2 lidé dosáhnout stejných výsledků při identickém postupu zpracování). V této diplomové práci byl testován pouze skenovací systém HDS 3000 a vyhodnocovací software Geomagic. Z experimentu Opakovatelnost jednoznačně vyplynulo, že přesnost (směrodatná odchylka rozdílů) opakovaného měření se pohybuje kolem hodnoty lehce pod 1 mm. Dále bylo zjištěno, že hustota skenování má výrazný vliv na tvar skenovaného objektu (jedná-li se o objekt s výrazným tvarovým zakřivením). Má-li být skenovaný objekt zachycen co nejvěrněji, je nutné ho skenovat s co nejvyšší hustotou. Při menší hustotě skenování jsou již výrazně ztraceny detaily a klesá přesnost. Zda je model vytvořen z osmi stanovisek rozmístěných okolo objektu, nebo ze čtyř rohových stanovisek, nemá významný vliv na tvar a vzhled modelu a výslednou přesnost. Z hlediska menší časové náročnosti při pořizování a zpracování dat tedy zcela postačí skenovat objekt ze čtyř rohových stanovisek. Pokud má vytvořený prostorový model sloužit ke zjišťování rozměrů, je nejvýhodnější tyto rozměry zjišťovat z modelu o co nejvyšší hustotě (v našem případě 5 mm x 5 mm a 10 mm x 10 mm). U těchto modelů není zaoblení rohů vlivem zpracování tolik výrazné a je tedy možné poměrně přesně určit dvojici bodů určujících daný rozměr. Pro velmi přesné zjištění délky ovšem postačí naskenované a neupravené mračno bodů, které nejlépe odpovídá naskenovanému objektu. 45
46 7 SEZNAM POUŽITÉ LITERATURY [1] ŠTRONER, Martin. POSPÍŠIL, Jiří.: Terestrické skenovací systémy. 1. vyd. Praha: Česká technika - nakladatelství ČVUT, s. ISBN [2] ŠTRONER, Martin. Teorie fungování terestrickcýh skenovacích systémů. Fyzikální principy skenovacích systémů. Bezpečnost práce. [online] [cit ] Dostupné z < [3] RYBAŘÍK, Václav. Nová sochařská díla z prachtického dioritu. [online] [cit ]. Dostupné z < [4] Životopis kardinála Josefa Berana [online] [cit ]. Dostupné z < [5] Technické parametry od výrobce, výrobní materiály Leica [6] Technické parametry od výrobce, výrobní materiály Leica. [7] RATIBORSKÝ, Jan. Geodézie vyd. Praha: vydavatelsví ČVUT, s. ISBN X. [8] KOSKA, Bronislav.Návod na cvičení: Projekt Vytvořené modelu sochy.[online]. Dostupné z < [9] Nápověda k programu Cyclone 6.0 [10] Nápověda k programu Geomagic Studio 10 46
47 8 SEZNAM PŘÍLOH Příloha č. 1: Opakovatelnost : Grafické znázornění rozdílů, změna hypsometrické stupnice Příloha č. 2: Vliv rozmístění stanovisek a hustoty skenování na přesnost modelování : Grafické znázornění rozdílů, změna hypsometrické stupnice Příloha č. 3: Složka Měření oměrných s výpočty provedenými v programu Excel- DVD - zápisníky z měření - mereni_omernych.xls Příloha č. 4: Složka Kompletní výsledky s hodnotami zpracování tvorby modelů - DVD - kompletni vysledky.xls Příloha č. 5: Složka Opakovatelnost -DVD - soubor Opakovatelnost.imp obsahující měřená data - složka Exporty Cyclone obsahující txt soubory se souřadnicemi bodů - složka Vytvořené modely obsahující všechny vytvořené sítě ve formátu wrp. - složka Grafické znázornění rozdílů obsahuje obrázky, znázorňující vývoj intervalů hypsometrické stupnice. Příloha č. 6: Složka 3D modely -DVD - soubor Beran.imp obsahující měřená data - složka Exporty Cyclone obsahující txt soubory se souřadnicemi bodů - složka Vytvořené modely obsahuje o Modely z rohových stanovisek o Modely ze všech stanovisek - složka Grafické znázornění rozdílů obsahuje obrázky, znázorňující vývoj intervalů hypsometrické stupnice. - Příloha č. 7 : Soubor dp_lucie_popelkova.pdf : elektornická podoba diplomové práce ve formátu pdf. - DVD 47

48 Příloha č. 1 48

49 Příloha č. 2 49

50 50
Srovnání možností zaměření a vyhodnocení historické fasády
 Srovnání možností zaměření a vyhodnocení historické fasády Ing. Bronislav Koska, Ing. Tomáš Křemen, Doc. Ing. Jiří Pospíšil, CSc. Katedra speciální geodézie Fakulta stavební České vysoké učení technické
Srovnání možností zaměření a vyhodnocení historické fasády Ing. Bronislav Koska, Ing. Tomáš Křemen, Doc. Ing. Jiří Pospíšil, CSc. Katedra speciální geodézie Fakulta stavební České vysoké učení technické
Zaměření vybraných typů nerovností vozovek metodou laserového skenování
 Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Terestrické 3D skenování
 Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Vytvoření modelu sochy
 Laserové skenování Návod na cvičení: Projekt Vytvoření modelu sochy Ing. B. Koska Vytvoření modelu sochy 1. Zadání Proveďte zaměření nepravidelného objektu sochy s využitím laserového skenovacího systému.
Laserové skenování Návod na cvičení: Projekt Vytvoření modelu sochy Ing. B. Koska Vytvoření modelu sochy 1. Zadání Proveďte zaměření nepravidelného objektu sochy s využitím laserového skenovacího systému.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
Laserové skenování (1)
") (1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
(1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Určení svislosti. Ing. Zuzana Matochová
 Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE PRAHA 2012 Bc. Eva Mertová ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE ZPRACOVÁNÍ
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE PRAHA 2012 Bc. Eva Mertová ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE ZPRACOVÁNÍ
Pozemní laserové skenování. Doc. Ing. Vlastimil Hanzl, CSc.
 Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Úloha č. 1 : TROJÚHELNÍK. Určení prostorových posunů stavebního objektu
 Václav Čech, ČVUT v Praze, Fakulta stavební, 008 Úloha č. 1 : TROJÚHELNÍK Určení prostorových posunů stavebního objektu Zadání : Zjistěte posun bodu P do P, umístěného na horní terase Stavební fakulty.
Václav Čech, ČVUT v Praze, Fakulta stavební, 008 Úloha č. 1 : TROJÚHELNÍK Určení prostorových posunů stavebního objektu Zadání : Zjistěte posun bodu P do P, umístěného na horní terase Stavební fakulty.
Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie
 Základy automatizace v IG - 154YZAG Návod na cvičení: Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie Ing. B. Koska 21. 11. 2008 Výpočet objemové bilance a rozdílového
Základy automatizace v IG - 154YZAG Návod na cvičení: Výpočet objemové bilance a rozdílového modelu terénu ze dvou etap zaměření půdní deponie Ing. B. Koska 21. 11. 2008 Výpočet objemové bilance a rozdílového
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE
 ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
Návod pro obnovu katastrálního operátu a převod
 Český úřad zeměměřický a katastrální Návod pro obnovu katastrálního operátu a převod Dodatek č. 3 Praha 2013 Zpracoval: Český úřad zeměměřický a katastrální Schválil: Ing. Karel Štencel, místopředseda
Český úřad zeměměřický a katastrální Návod pro obnovu katastrálního operátu a převod Dodatek č. 3 Praha 2013 Zpracoval: Český úřad zeměměřický a katastrální Schválil: Ing. Karel Štencel, místopředseda
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
7. Určování výšek II.
 7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
České vysoké učení technické v Praze
 České vysoké učení technické v Praze Fakulta stavební Obor: Geodézie a kartografie Studijní program: Geodézie a kartografie Geodetické metody pro určení souřadnic nepřístupných bodů na ocelové konstrukci
České vysoké učení technické v Praze Fakulta stavební Obor: Geodézie a kartografie Studijní program: Geodézie a kartografie Geodetické metody pro určení souřadnic nepřístupných bodů na ocelové konstrukci
Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách
 zákona č. 137/2006 Sb., o veřejných zakázkách") Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
Název veřejné zakázky: Laserový 3D skener II Odůvodnění vymezení technických podmínek podle 156 odst. 1 písm. c) zákona č. 137/2006 Sb., o veřejných zakázkách Technická podmínka: Odůvodnění HW specifikace
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin
 Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
Podrobné polohové bodové pole (1)
") Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání
Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY LASEROVÉ SKENOVACÍ SYSTÉMY Laserové skenování LIDAR - z angl. Light Detection And Ranging v současnosti jedna z
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník LASEROVÉ SKENOVACÍ SYSTÉMY LASEROVÉ SKENOVACÍ SYSTÉMY Laserové skenování LIDAR - z angl. Light Detection And Ranging v současnosti jedna z
SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS
 SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS NIVELACE - úvod NIVELACE je měření výškového rozdílu od realizované (vytyčené) vodorovné roviny Provádí se pomocí
SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS NIVELACE - úvod NIVELACE je měření výškového rozdílu od realizované (vytyčené) vodorovné roviny Provádí se pomocí
ení tvaru a polohy laserového svazku
 Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
Trigonometrické určení výšek nepřístupných bodů na stavebním objektu
 Trigonometrické určení výšek nepřístupných bodů na stavebním objektu Prof. Ing. Jiří Pospíšil, CSc., 2010 V urbanismu a pozemním stavitelství lze trigonometrického určování výšek užít při zjišťování relativních
Trigonometrické určení výšek nepřístupných bodů na stavebním objektu Prof. Ing. Jiří Pospíšil, CSc., 2010 V urbanismu a pozemním stavitelství lze trigonometrického určování výšek užít při zjišťování relativních
Program Denoiser v1.4 (10.11.2012)
") Program Denoiser v1.4 (10.11.2012) doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Anotace Program pro potlačení šumu v datech 3D skenování na základě využití okolních dat prokládáním bivariantními
Program Denoiser v1.4 (10.11.2012) doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Anotace Program pro potlačení šumu v datech 3D skenování na základě využití okolních dat prokládáním bivariantními
Cvičení software Groma základní seznámení
 Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu VÝUKA V TERÉNU Z GEODÉZIE 1, 2 - VY1 kód úlohy název úlohy K PŘÍMÉ
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu VÝUKA V TERÉNU Z GEODÉZIE 1, 2 - VY1 kód úlohy název úlohy K PŘÍMÉ
Minimum pro práci s totální stanicí Trimble DR 3606
 Minimum pro práci s totální stanicí Trimble DR 3606 Tento návod vznikl na základě praktických zkušeností s obsluhou a nastavením přístroje. Obsahuje pouze popis funkcí a nastavení přímo použitých při měření.
Minimum pro práci s totální stanicí Trimble DR 3606 Tento návod vznikl na základě praktických zkušeností s obsluhou a nastavením přístroje. Obsahuje pouze popis funkcí a nastavení přímo použitých při měření.
4.1 Základní pojmy Zákonné měřicí jednotky.
 4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
T a c h y m e t r i e
 T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
Tachymetrie (Podrobné měření výškopisu)
") Tachymetrie (Podrobné měření výškopisu) Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_8). Pro jeho vytvoření je potřeba znát polohu a výšku vhodně zvolených
Tachymetrie (Podrobné měření výškopisu) Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_8). Pro jeho vytvoření je potřeba znát polohu a výšku vhodně zvolených
6.1 Základní pojmy - zákonné měřící jednotky
 6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
2. Bodové pole a souřadnicové výpočty
 2. Bodové pole a souřadnicové výpočty 2.1 Body 2.2 Bodová pole 2.3 Polohové bodové pole. 2.3.1 Rozdělení polohového bodového pole. 2.3.2 Dokumentace geodetického bodu. 2.3.3 Stabilizace a signalizace bodů.
2. Bodové pole a souřadnicové výpočty 2.1 Body 2.2 Bodová pole 2.3 Polohové bodové pole. 2.3.1 Rozdělení polohového bodového pole. 2.3.2 Dokumentace geodetického bodu. 2.3.3 Stabilizace a signalizace bodů.
ÚHLŮ METODY MĚŘENÍ ÚHLŮ A SMĚRŮ CHYBY PŘI MĚŘENÍ ÚHLŮ A SMĚRŮ
 5. PŘEDNÁŠKA LETNÍ 00 ING. HANA STAŇKOVÁ, Ph.D. MĚŘENÍ ÚHLŮ METODY MĚŘENÍ ÚHLŮ A SMĚRŮ CHYBY PŘI MĚŘENÍ ÚHLŮ A SMĚRŮ GEODÉZIE 5. PŘEDNÁŠKA LETNÍ 00 METODY MĚŘENÍ ÚHLŮ. měření úhlů v jedné poloze dalekohledu.
5. PŘEDNÁŠKA LETNÍ 00 ING. HANA STAŇKOVÁ, Ph.D. MĚŘENÍ ÚHLŮ METODY MĚŘENÍ ÚHLŮ A SMĚRŮ CHYBY PŘI MĚŘENÍ ÚHLŮ A SMĚRŮ GEODÉZIE 5. PŘEDNÁŠKA LETNÍ 00 METODY MĚŘENÍ ÚHLŮ. měření úhlů v jedné poloze dalekohledu.
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2014 Cvičen ení č.. 2 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2014 Cvičen ení č.. 2 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství. Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ. VOŠ a SŠS Vysoké Mýto leden 2008
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
5.1 Definice, zákonné měřící jednotky.
 5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D.
 Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D. Projekt (TB02CUZK002 - Integrace nové techniky a technologie do procesu obnovy katastrálního Hlavní části projektu: Moderní měřické aparatury
Ing. Radek Makovec Ing. Václav Šafář Ing. Pavel Hánek, Ph.D. Projekt (TB02CUZK002 - Integrace nové techniky a technologie do procesu obnovy katastrálního Hlavní části projektu: Moderní měřické aparatury
Inspekce tvaru součásti
 Inspekce tvaru součásti. Cílem cvičení je inspekce tvaru součásti spočívající načtení referenčního CAD modelu, v ustavení naskenovaného tvaru vzhledem k tomuto referenčnímu modelu, kontrole průměru spodního
Inspekce tvaru součásti. Cílem cvičení je inspekce tvaru součásti spočívající načtení referenčního CAD modelu, v ustavení naskenovaného tvaru vzhledem k tomuto referenčnímu modelu, kontrole průměru spodního
Návod k použití softwaru Solar Viewer 3D
 Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Nastavení TS Leica TS06 pro měření úhlů a délek
 Nastavení TS Leica TS06 pro měření úhlů a délek a) Tlačítka s fixní funkcí b) Navigační tlačítka c) ENTER d) ESC e) Funkční klávesy F1 až F4 f) Alfanumerická klávesnice Libelu a olovnici lze spustit tlačítky
Nastavení TS Leica TS06 pro měření úhlů a délek a) Tlačítka s fixní funkcí b) Navigační tlačítka c) ENTER d) ESC e) Funkční klávesy F1 až F4 f) Alfanumerická klávesnice Libelu a olovnici lze spustit tlačítky
Kontrola svislosti montované budovy
 1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
3. Souřadnicové výpočty
 3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
Laserové skenování ve speciálních průmyslových aplikacích. 1. Plošné monitorování dynamických deformací vrat plavební komory
 Laserové skenování ve speciálních průmyslových aplikacích Ing. Bronislav Koska, Ing. Tomáš Křemen, prof. Ing. Jiří Pospíšil, CSc., Ing. Martin Štroner, Ph.D.. Katedra speciální geodézie Fakulta stavební
Laserové skenování ve speciálních průmyslových aplikacích Ing. Bronislav Koska, Ing. Tomáš Křemen, prof. Ing. Jiří Pospíšil, CSc., Ing. Martin Štroner, Ph.D.. Katedra speciální geodézie Fakulta stavební
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
Geodézie 3 (154GD3) Téma č. 8: Podrobné měření výškopisu - tachymetrie
 Téma č. 8: Podrobné měření výškopisu - tachymetrie") Geodézie 3 (154GD3) Téma č. 8: Podrobné měření výškopisu - tachymetrie 1 Výškopis: Vytváření obrazu světa měřením a zobrazováním do mapy (v jakékoli formě) předpokládá měření polohy a výšky (polohopis
Geodézie 3 (154GD3) Téma č. 8: Podrobné měření výškopisu - tachymetrie 1 Výškopis: Vytváření obrazu světa měřením a zobrazováním do mapy (v jakékoli formě) předpokládá měření polohy a výšky (polohopis
Rychlý manuál. pro uživatele softwaru Trimble ACCESS v totálních stanicích. Listopad 2015 MM
 Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
Seznámení s moderní přístrojovou technikou Totální stanice a digitální nivelační přístroje
 Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem a státním rozpočtem
7. Určování výšek II.
 7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
Totální stanice řady Trimble 5600 DR Direct Reflex se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic.
 Totální stanice řady Trimble 5600 DR se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic. K dispozici jsou tři DR dálkoměry Možnost rozšíření na Autolock a Robotic Čtyřrychlostní
Totální stanice řady Trimble 5600 DR se servem, vysoce produktivní měřický systém rozšiřitelný na Autolock a Robotic. K dispozici jsou tři DR dálkoměry Možnost rozšíření na Autolock a Robotic Čtyřrychlostní
Výzkumný ústav geodetický, topografický a kartografický, v.v.i
 Výzkumný ústav geodetický, topografický a kartografický, v.v.i Zpráva o řešení úkolu za I. pololetí 2011 Výzkum uplatnění dat laserového skenování v katastru nemovitostí Červen 2011 Výzkumný ústav geodetický,
Výzkumný ústav geodetický, topografický a kartografický, v.v.i Zpráva o řešení úkolu za I. pololetí 2011 Výzkum uplatnění dat laserového skenování v katastru nemovitostí Červen 2011 Výzkumný ústav geodetický,
PODROBNÉ MĚŘENÍ POLOHOPISNÉ
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství MAPOVÉ PODKLADY Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 7. 4. 2017 PODROBNÉ MĚŘENÍ POLOHOPISNÉ
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství MAPOVÉ PODKLADY Ing. Bc. Pavel Voříšek (úředně oprávněný zeměměřický inženýr). Vysoké Mýto 7. 4. 2017 PODROBNÉ MĚŘENÍ POLOHOPISNÉ
Nastavení TS Leica TC403 pro měření situace registrace měřených dat
 Nastavení TS Leica TC403 pro měření situace registrace měřených dat F4 OK (šipkami vlevo/vpravo možno zakázkami listovat). Při podrobném měření je vhodné měřit ve zvoleném souřadnicovém systému ve Správci
Nastavení TS Leica TC403 pro měření situace registrace měřených dat F4 OK (šipkami vlevo/vpravo možno zakázkami listovat). Při podrobném měření je vhodné měřit ve zvoleném souřadnicovém systému ve Správci
Laserové skenování - zaměření a zpracování 3D dat v průběhu výstavby tunelu
 Název: Laserové skenování - zaměření a zpracování 3D dat v průběhu výstavby tunelu Datum provedení: 28. 6. 2013 31. 10. 2014 Provedl: Control System International a.s. Stručný popis: Průběžné měření metodou
Název: Laserové skenování - zaměření a zpracování 3D dat v průběhu výstavby tunelu Datum provedení: 28. 6. 2013 31. 10. 2014 Provedl: Control System International a.s. Stručný popis: Průběžné měření metodou
ScanStation P20 uživatelská kalibrace (procedura Check & Adjust)
") ScanStation P20 uživatelská kalibrace (procedura Check & Adjust) ScanStation P20 and Cyclone 8.0 Introduction Meeting, 02 05 Oct 2012, Heerbrugg Bianca Gordon, překlad do češtiny Daniel Šantora Přehled
ScanStation P20 uživatelská kalibrace (procedura Check & Adjust) ScanStation P20 and Cyclone 8.0 Introduction Meeting, 02 05 Oct 2012, Heerbrugg Bianca Gordon, překlad do češtiny Daniel Šantora Přehled
Návod na import měřených dat ("zápisníku") GROMA
 GROMA") Návod na import měřených dat ("zápisníku") GROMA Před výpočtem je nutné založit soubor se seznamem souřadnic. Postup výpočtu a import měřených dat se musí zapisovat do souboru (protokol o výpočtech). Před
Návod na import měřených dat ("zápisníku") GROMA Před výpočtem je nutné založit soubor se seznamem souřadnic. Postup výpočtu a import měřených dat se musí zapisovat do souboru (protokol o výpočtech). Před
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Metody měření výškopisu, Tachymetrie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
Seminář z geoinformatiky Metody měření výškopisu, Tachymetrie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
Měřická dokumentace používané metody
 Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Leica 02/2004
 Totální TPS1200 Dne 16.02. jsme Vám poprvé prostřednictvím médií představili novou Profesionální řadu totálních stanic TPS1200. Naživo jste si ji pak mohli prohlédnout na letošní dubnové LEICA Tour. Pokud
Totální TPS1200 Dne 16.02. jsme Vám poprvé prostřednictvím médií představili novou Profesionální řadu totálních stanic TPS1200. Naživo jste si ji pak mohli prohlédnout na letošní dubnové LEICA Tour. Pokud
Výuka v terénu I. Obory: Inženýrská geodézie a Důlní měřictví. Skupiny: GB1IGE01, GB1IGE02, GB1DME
 Výuka v terénu I Obory: Inženýrská geodézie a Důlní měřictví Skupiny: GB1IGE01, GB1IGE02, GB1DME01 27. 4-30. 4. 2015 1. Trojúhelníkový řetězec Zásady pro zpracování úlohy: Zaměřte ve skupinách úhly potřebné
Výuka v terénu I Obory: Inženýrská geodézie a Důlní měřictví Skupiny: GB1IGE01, GB1IGE02, GB1DME01 27. 4-30. 4. 2015 1. Trojúhelníkový řetězec Zásady pro zpracování úlohy: Zaměřte ve skupinách úhly potřebné
OBSAH. Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení
 OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power
 CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ
 Komora geodetů a kartografů ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ Ing. Jaroslav Braun 1 Ing. Martin Lidmila, Ph.D. 2 doc. Ing. Martin Štroner, Ph.D. 1 1 Katedra speciální geodézie,
Komora geodetů a kartografů ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ Ing. Jaroslav Braun 1 Ing. Martin Lidmila, Ph.D. 2 doc. Ing. Martin Štroner, Ph.D. 1 1 Katedra speciální geodézie,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA SPECIÁLNÍ GEODÉZIE DIPLOMOVÁ PRÁCE Porovnání sledování chování stavební konstrukce prostorovou polární metodou s laserovým skenováním Zpracoval:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA SPECIÁLNÍ GEODÉZIE DIPLOMOVÁ PRÁCE Porovnání sledování chování stavební konstrukce prostorovou polární metodou s laserovým skenováním Zpracoval:
7.1 Definice délky. kilo- km 10 3 hekto- hm mili- mm 10-3 deka- dam 10 1 mikro- μm 10-6 deci- dm nano- nm 10-9 centi- cm 10-2
 7. Měření délek 7.1 Definice délky, zákonné měřící jednotky 7.2 Měření délek pásmem 7.3 Optické měření délek 7.3.1 Paralaktické měření délek 7.3.2 Ryskový dálkoměr 7.4 Elektrooptické měření délek 7.5 Fyzikální
7. Měření délek 7.1 Definice délky, zákonné měřící jednotky 7.2 Měření délek pásmem 7.3 Optické měření délek 7.3.1 Paralaktické měření délek 7.3.2 Ryskový dálkoměr 7.4 Elektrooptické měření délek 7.5 Fyzikální
GEODÉZIE II. Metody určov. Geometrická nivelace ze středu. vzdálenost
 Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Laserový skenovací systém LORS vývoj a testování přesnosti
 Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
Porovnání skutečného stavu ostění štoly s projektem
 Základy automatizace v IG Návod na cvičení: Porovnání skutečného stavu ostění štoly s projektem Ing. B. Koska 8. 4. 2008 Porovnání skutečného stavu ostění štoly s projektem 1. Zadání Zaměřte skutečný stav
Základy automatizace v IG Návod na cvičení: Porovnání skutečného stavu ostění štoly s projektem Ing. B. Koska 8. 4. 2008 Porovnání skutečného stavu ostění štoly s projektem 1. Zadání Zaměřte skutečný stav
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019
 VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
VYUŽITÍ SNÍMACÍCH SYSTÉMU V PRŮMYSLOVÉ AUTOMATIZACI SVOČ FST 2019 Bc. Michael Froněk Západočeská univerzita v Plzni Univerzitní 8, 306 14 Plzeň Česká republika ABSTRAKT Práce se zabývá řešením problému
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA
 Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
Testování programu PhotoScan pro tvorbu 3D modelů objektů. Ing. Tomáš Jiroušek
 Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Popis teodolitu Podmínky správnosti teodolitu Metody měření úhlů
 5. PŘEDNÁŠKA LETNÍ 00 Ing. Hana Staňková, Ph.D. Měření úhlů Popis teodolitu Podmínky správnosti teodolitu Metody měření úhlů GEODÉZIE 5. PŘEDNÁŠKA LETNÍ 00 POPIS TEODOLITU THEO 00 THEO 00 kolimátor dalekohled
5. PŘEDNÁŠKA LETNÍ 00 Ing. Hana Staňková, Ph.D. Měření úhlů Popis teodolitu Podmínky správnosti teodolitu Metody měření úhlů GEODÉZIE 5. PŘEDNÁŠKA LETNÍ 00 POPIS TEODOLITU THEO 00 THEO 00 kolimátor dalekohled
Přesnost 3D skenovacích technologií v geodézii a možnosti jejího zvyšování
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra speciální geodézie Přesnost 3D skenovacích technologií v geodézii a možnosti jejího zvyšování Accuracy of 3D scanning technology in the field
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra speciální geodézie Přesnost 3D skenovacích technologií v geodézii a možnosti jejího zvyšování Accuracy of 3D scanning technology in the field
Využití tabulkového procesoru MS Excel
 Semestrální práce Licenční studium Galileo srpen, 2015 Využití tabulkového procesoru MS Excel Ing Marek Bilko Třinecké železárny, a.s. Stránka 1 z 10 OBSAH 1. ÚVOD... 2 2. DATOVÝ SOUBOR... 2 3. APLIKACE...
Semestrální práce Licenční studium Galileo srpen, 2015 Využití tabulkového procesoru MS Excel Ing Marek Bilko Třinecké železárny, a.s. Stránka 1 z 10 OBSAH 1. ÚVOD... 2 2. DATOVÝ SOUBOR... 2 3. APLIKACE...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání H/190-4 název úlohy Hloubkové
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání H/190-4 název úlohy Hloubkové
154GEY2 Geodézie 2 5. Měření při účelovém mapování a dokumentaci skutečného provedení budov.
 154GEY2 Geodézie 2 5. Měření při účelovém mapování a dokumentaci skutečného provedení budov. 5.1 Úvod. 5.2 Prostorová polární metoda. 5.3 Tvorba (výškopisných) map. 1 5.1 Úvod. Účelové mapy jsou mapy se
154GEY2 Geodézie 2 5. Měření při účelovém mapování a dokumentaci skutečného provedení budov. 5.1 Úvod. 5.2 Prostorová polární metoda. 5.3 Tvorba (výškopisných) map. 1 5.1 Úvod. Účelové mapy jsou mapy se
GEODETICKÝ MONITORING PŘIROZENÝCH PODZEMNÍCH PROSTOR
 GEODETICKÝ MONITORING PŘIROZENÝCH PODZEMNÍCH PROSTOR Doc. Ing. Pavel Hánek, CSc. (s využitím DP Ing. Aleny Roušarové) Následující stránky jsou doplňkem přednášek předmětu IG4 2018 PODZEMNÍ DUTINY - Umělé
GEODETICKÝ MONITORING PŘIROZENÝCH PODZEMNÍCH PROSTOR Doc. Ing. Pavel Hánek, CSc. (s využitím DP Ing. Aleny Roušarové) Následující stránky jsou doplňkem přednášek předmětu IG4 2018 PODZEMNÍ DUTINY - Umělé
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP
 SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
Ověření relativní přesnosti určování objemů
 Ověření relativní přesnosti určování objemů Ing. Tomáš Křemen, Ph.D., prof. Ing. Jiří Pospíšil, CSc., Ing. Bronislav Koska tomas.kremen@fsv.cvut.cz Katedra speciální geodézie, Thákurova 7, 166 29, Praha
Ověření relativní přesnosti určování objemů Ing. Tomáš Křemen, Ph.D., prof. Ing. Jiří Pospíšil, CSc., Ing. Bronislav Koska tomas.kremen@fsv.cvut.cz Katedra speciální geodézie, Thákurova 7, 166 29, Praha
Cvičení č. 6 : Komplexní úloha
 Cvičení č. 6 : Komplexní úloha Obsah 1. Úvod, účel komplexní úlohy... 2 2. Postup práce při mapování... 2 3. Tachymetrické měření přístrojem Topcon GPT-2006... 3 4. Kancelářské zpracování a kresba mapy...
Cvičení č. 6 : Komplexní úloha Obsah 1. Úvod, účel komplexní úlohy... 2 2. Postup práce při mapování... 2 3. Tachymetrické měření přístrojem Topcon GPT-2006... 3 4. Kancelářské zpracování a kresba mapy...
Matematické modelování dopravního proudu
 Matematické modelování dopravního proudu Ondřej Lanč, Alena Girglová, Kateřina Papežová, Lucie Obšilová Gymnázium Otokara Březiny a SOŠ Telč lancondrej@centrum.cz Abstrakt: Cílem projektu bylo seznámení
Matematické modelování dopravního proudu Ondřej Lanč, Alena Girglová, Kateřina Papežová, Lucie Obšilová Gymnázium Otokara Březiny a SOŠ Telč lancondrej@centrum.cz Abstrakt: Cílem projektu bylo seznámení
GEPRO řešení pro GNSS Leica
 GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
SPŠ STAVEBNÍ České Budějovice GEODÉZIE. Teodolit a měření úhlů
 SPŠ STAVEBNÍ České Budějovice GEODÉZIE Teodolit a měření úhlů ještě doplnění k výškovému systému jadranský systém udává pro stejný bod hodnotu výšky o cca 0,40 m větší než systém Bpv Potřebujeme vědět
SPŠ STAVEBNÍ České Budějovice GEODÉZIE Teodolit a měření úhlů ještě doplnění k výškovému systému jadranský systém udává pro stejný bod hodnotu výšky o cca 0,40 m větší než systém Bpv Potřebujeme vědět
Nový firmware V2.0 pro totální stanice FlexLine
 Nový firmware V2.0 pro totální stanice FlexLine Vážení zákazníci! V lednu 2010 uvedl výrobce na trh nový firmware verze 2.0 pro totální stanice modelové řady FlexLine, který přináší několik zásadních novinek
Nový firmware V2.0 pro totální stanice FlexLine Vážení zákazníci! V lednu 2010 uvedl výrobce na trh nový firmware verze 2.0 pro totální stanice modelové řady FlexLine, který přináší několik zásadních novinek
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA SPECIÁLNÍ GEODÉZIE Příprava vzorových úloh pro předmět Laserové skenování Diplomová práce Vypracovala: Bc. Jana Pospíšilová Vedoucí diplomové
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA SPECIÁLNÍ GEODÉZIE Příprava vzorových úloh pro předmět Laserové skenování Diplomová práce Vypracovala: Bc. Jana Pospíšilová Vedoucí diplomové
PŮDORYSNĚ ZAKŘIVENÁ KONSTRUKCE PODEPŘENÁ OBLOUKEM
 PŮDORYSNĚ ZAKŘIVENÁ KONSTRUKCE PODEPŘENÁ OBLOUKEM 1. Úvod Tvorba fyzikálních modelů, tj. modelů skutečných konstrukcí v určeném měřítku, navazuje na práci dalších řešitelských týmů z Fakulty stavební Vysokého
PŮDORYSNĚ ZAKŘIVENÁ KONSTRUKCE PODEPŘENÁ OBLOUKEM 1. Úvod Tvorba fyzikálních modelů, tj. modelů skutečných konstrukcí v určeném měřítku, navazuje na práci dalších řešitelských týmů z Fakulty stavební Vysokého
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. Ing. Jana Marešová, Ph.D. rok 2018-2019 V případě pokud chceme upravit (narovnat přímkou) lomenou hranici při nezměněných
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. Ing. Jana Marešová, Ph.D. rok 2018-2019 V případě pokud chceme upravit (narovnat přímkou) lomenou hranici při nezměněných
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání U1-U2/190-4 název úlohy Připojovací
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání U1-U2/190-4 název úlohy Připojovací
Seminář z geoinformatiky
 Seminář z geoinformatiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Délka je definována jako vzdálenost dvou bodů ve smyslu definované metriky. Délka je tedy popsána v jednotkách, tj. v násobcích
Seminář z geoinformatiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Délka je definována jako vzdálenost dvou bodů ve smyslu definované metriky. Délka je tedy popsána v jednotkách, tj. v násobcích
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ. Diplomová práce
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Diplomová práce PRAHA 2015 Bc. Jan BARTŮNĚK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra speciální geodézie Testování odšumění a rozlišovací
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Diplomová práce PRAHA 2015 Bc. Jan BARTŮNĚK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra speciální geodézie Testování odšumění a rozlišovací
PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP
 Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Metoda Monte Carlo a její aplikace v problematice oceňování technologií. Manuál k programu
 Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena
 Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena Před spuštěním programu je dobré přepnout program do tzv.run Modu pomocí klávesové zkratky Ctrl+M, čímž se nám sníží zatížení
Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena Před spuštěním programu je dobré přepnout program do tzv.run Modu pomocí klávesové zkratky Ctrl+M, čímž se nám sníží zatížení
Využití moderních geodetických metod ve stavebnictví
 Využití moderních geodetických metod ve stavebnictví Vypracoval: Ing. Ivo Kohoušek, 27. října 2017 SG Geotechnika a.s. s více než 90letou tradicí patří mezi největší a nejstarší geotechnické konzultační
Využití moderních geodetických metod ve stavebnictví Vypracoval: Ing. Ivo Kohoušek, 27. října 2017 SG Geotechnika a.s. s více než 90letou tradicí patří mezi největší a nejstarší geotechnické konzultační
Tvorba digitálního modelu terénu
 Tvorba digitálního modelu terénu V závěrečné fázi našeho projektu využijeme programu k vizualizaci těchto dat DMT a také k jejich porovnání Spojení druhu bodů Z důvodu exportu bodů je nutné spojit druhy
Tvorba digitálního modelu terénu V závěrečné fázi našeho projektu využijeme programu k vizualizaci těchto dat DMT a také k jejich porovnání Spojení druhu bodů Z důvodu exportu bodů je nutné spojit druhy
TECHNICKÁ NIVELACE (U_6) (určování výšek bodů technickou nivelací)
 (určování výšek bodů technickou nivelací)") Pracovní pomůcka TECHNICKÁ NIVELACE (U_6) (určování výšek bodů technickou nivelací) Pořadem technické nivelace (TN) vloženého mezi dva dané nivelační body (PNS-Praha, ČSNS), které se považují za ověřené,
Pracovní pomůcka TECHNICKÁ NIVELACE (U_6) (určování výšek bodů technickou nivelací) Pořadem technické nivelace (TN) vloženého mezi dva dané nivelační body (PNS-Praha, ČSNS), které se považují za ověřené,
GEODÉZIE II. metody Trigonometrická metoda Hydrostatická nivelace Barometrická nivelace GNSS metoda. Trigonometricky určen. ení. Princip určen.
 Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II Ing. Hana Staňková, Ph.D. 3. URČOV OVÁNÍ VÝŠEK metody Trigonometrická metoda
Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II Ing. Hana Staňková, Ph.D. 3. URČOV OVÁNÍ VÝŠEK metody Trigonometrická metoda
Přehled vhodných metod georeferencování starých map
 Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Průmyslová střední škola Letohrad
 Průmyslová střední škola Letohrad Manuál pro obsluhu geodetických přístrojů 2014 Zpracoval: Ing. Jiří Štěpánek Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF)
Průmyslová střední škola Letohrad Manuál pro obsluhu geodetických přístrojů 2014 Zpracoval: Ing. Jiří Štěpánek Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF)