PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
|
|
|
- Miroslava Kučerová
- před 9 lety
- Počet zobrazení:
Transkript
1 VŠB-TU 2005/2006 PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ PŘEKLAD HARDWARE IN THE LOOP SIMULATION Vypracoval: Ha Minh

2 ANGLICKÝ ORIGINAL What is Hardware-in-the-Loop Simulation? Embedded systems are designed to control complex plants such as land vehicles, satellites, spacecrafts, Unmanned Aerial Vehicles (UAVs), aircrafts, weapon systems, marine vehicles, and jet engines. They generally require a high level of complexity within the embedded system to manage the complexity of the plant under control. Hardware-in-the-Loop (HIL) simulation is a technique that is used increasingly in the development and test of complex real-time embedded systems. The purpose of HIL simulation is to provide an effective platform for developing and testing real-time embedded systems. HIL simulation provides an effective platform by adding the complexity of the plant under control to the test platform. The complexity of the plant under control is included in test and development by adding a mathematical representation of all related dynamic systems. These mathematical representations are referred to as the plant simulation. For example, an HIL simulation platform for the development of automotive anti-lock braking systems may have mathematical representations for each of the following subsystems in the plant simulation: Vehicle dynamics such as suspension, wheels, tires, roll, pitch and yaw Road characteristics Dynamics of the brake system s hydraulic components An HIL simulation must also include electrical emulation of sensors and actuators. These electrical emulations act as the interface between the plant simulation and the embedded system under test. The value of each electrically emulated sensor is controlled by the plant simulation and is read by the embedded system under test. Likewise, the embedded system under test implements its control algorithms by outputting actuator control signals. Changes in the control signals result in changes to variable values in the plant simulation. Why use Hardware-in-the-Loop Simulation? This question is an important part of understanding real-time technology. To restate the question using a control systems term: Why not connect the embedded system under test to the "real plant," that is the dynamic system being controlled, to perform development and testing? In many cases, the most effective way to develop an embedded system is to connect the embedded system to the real plant. In other cases, HIL simulation is more efficient. The metric of development and test efficiency is typically a formula that includes the following factors: 1. Cost 2. Duration 3. Safety Cost of the approach will be a measure of the cost of all tools and effort. The duration of development and test affects the time-to-market for a planned product. The safety factor and duration are typically equated to a cost measure. Specific conditions that warrant the use of HIL simulation include the following: Tight development schedules High-burden-rate plant Early process human factors development Tight Development Schedules The tight development schedules associated with most new automotive, aerospace and defense programs do not allow embedded system testing to wait for a prototype to be available. In fact, most new development schedules assume that HIL simulation will be used in parallel with the development of the plant. For example, by the time a new automobile engine prototype is made available for control system testing, 95% of the engine controller testing will have been completed using HIL simulation. 2
 simulation is a technique that is used increasingly in the development and test of complex real-time embedded systems.")
3 The aerospace and defense industries are even more likely to impose a tight development schedule. Aircraft and land vehicle development programs are using desktop and HIL simulation to perform design, test, and integration in parallel. Companies such as Gulfstream and United Defense have executed highly efficient and successful programs using the Simulation-Centric process. High-Burden-Rate Plant In many cases, the plant is more expensive than a high fidelity, real-time simulator and therefore has a higher-burden rate. Therefore, it is more economical to develop and test while connected to an HIL simulator than the real plant. For jet engine manufacturers, HIL simulation is a fundamental part of engine development. The development of Full Authority Digital Engine Controllers (FADEC) for aircraft jet engines is an extreme example of a high-burden-rate plant. Each jet engine can cost millions of dollars. In contrast, an HIL simulator designed to test a jet engine manufacturer s complete line of engines may demand merely a tenth of the cost of a single engine. Early Process Human Factors Development HIL simulation is a key step in the process of developing human factors, a method of ensuring usability and system consistency using software ergonomics, human-factors research and design. For real-time technology, human-factors development is the task of collecting usability data from man-in-the-loop testing for components that will have a human interface. An example of usability testing is the development of fly-by-wire flight controls. Fly-by-wire flight controls eliminate the mechanical linkages between the flight controls and the aircraft control surfaces. Sensors communicate the demanded flight response and then apply realistic force feedback to the fly-bywire controls using motors. The behavior of fly-by-wire flight controls is defined by control algorithms. Changes in algorithm parameters can translate into more or less flight response from a given flight control input. Likewise, changes in the algorithm parameters can also translate into more or less force feedback for a given flight control input. The correct parameter values are a subjective measure. Therefore, it is important to get input from numerous man-in-the-loop tests to obtain optimal parameter values. In the case of fly-by-wire flight controls development, HIL simulation is used to simulate human factors. The flight simulator includes plant simulations of aerodynamics, engine thrust, environmental conditions, flight control dynamics and more. Prototype fly-by-wire flight controls are connected to the simulator and test pilots evaluate flight performance given various algorithm parameters. The alternative to HIL simulation for human factors and usability development is to place prototype flight controls in early aircraft prototypes and test for usability during flight test. This approach fails when mesuring the three conditions listed above. Cost: A flight test is extremely costly and therefore the goal is to minimize any development occurring with flight test. Duration: Developing flight controls with flight test will extend the duration of an aircraft development program. Using HIL simulation, the flight controls may be developed well before a real aircraft is available. Safety: Using flight test for the development of critical components such as flight controls has a major safety implication. Should errors be present in the design of the prototype flight controls, the result could be a crash landing. Given all three criteria listed at the beginning of page, it seems that HIL simulation is, once again, the best option for developing usability and human factors. 3

4 4
5 5
6 6

7 7

8 8
9 ČESKÝ PŘEKLAD 1. Co je Hardware-in-the-Loop simulace? Vestavené zařízení jsou navržené k ovládaní složitého systému jako pozemní vozidla, družice, kosmická plavidla, bezpilotní letadla (UAVS), letadla, systémy zbraní, námořní pravidla, a tryskové motory. Tyto systémy obecně požadují vysokou úroveň složitost, přičemž vestavené zařízení musí zvládat složitost systému. Hardware-in-the-Loop (HIL) simulace je technika, která je užívaná stále více ve vývoji a testu složitých real-time vestavených systémů. Účel HIL simulace je poskytnout efektivní platformu pro vývoj a zkoušení real-time vestavených systémů. HIL simulace poskytne efektivní platformu přidáváním složitosti regulačního obvodu k testovatelné platformě. Složitost regulačního obvodu je obsažená v testu a vývoji přidáváním matematického modelu všech souvisejících dynamických systémů. Tyto matematické modely jsou považovány jako "simulace systému". Například, HIL simulační platforma pro vývoj automobilové brzdové systémy ABS má snad matematické modely pro každý z následujících podsystémů při simulaci regulačního obvodu: Dynamiky motorových vozidel jako zastavení, kola, pneumatiky, otáčení, stoupání a odbočení Jízdní vlastnosti Dynamiky hydraulických součástí brzdové soustavy HIL simulace musí také zahrnout elektrické napodobování senzorů a akčních členů. Tato elektrická napodobování chová jako rozhraní mezi simulačním obvodem a testovaným vestaveným zařízením. Hodnota každého elektricky napodobovaného senzoru je regulována simulačním obvodem a je vstup do testovaného vestaveného zařízení. Podobně, testované vestavené zařízení realizuje jeho algoritmy řízení tvorbou akční řídicích signálů. Změny řídicích signálech mají za následek změny hodnot proměnných při simulaci regulačního obvodu. 2. Proč se používá Hardware-in-the-Loop simulace? Tato otázka je důležitá část pro porozumění real-time technologie. Při formulaci otázky s použitím termíny z oblasti řídicích systémů: Proč nepřipojit testovaný vestavený zařízení ke 9
 simulace je technika, která je užívaná stále více ve vývoji a testu složitých real-time vestavených systémů.")
10 "skutečnému regulačnímu obvodu," který je regulovaný dynamický systém, abychom zlepšili vývoj a testování? V mnoha případech, nejefektivnější cesta, jak vyvinout vestavený zařízení, je připojit vestavený zařízení ke skutečnému regulačnímu obvodu. V dalších případech, HIL simulace je účinnější. Měřítko efektivity vývoje a testu je známý vzorec, který zahrnuje následující faktory: 1. Cena 2. Doba trvání 3. Bezpečnost Cena přístupu bude míra z ceny všech nástrojů a úsilí. Doba trvání vývoje a testu ovlivní time-to-market pro plánovaný produkt. Faktor bezpečnosti a doba trvání jsou srovnatelné se spočítanou cenou. Specifické podmínky, které jsou záruka použití HIL simulace, zahrnují následující: Pevné vývojové plány Vysoká stupeň podstaty systému Dřívější proces vývoje způsobeného lidskými potřebami Pevné vývojové plány Pevné vývojové plány spojené s většinou nových automobilových, kosmických a obranných programů nedovolí testování vestaveného zařízení čekat až je prototyp k dispozici. Ve skutečnosti, většina nových vývojových plánů předpokládá, že HIL simulace bude používána paralelně s vývojem systému. Například, než nový automobilový prototyp motoru je výroben pro testování řídicího systému, 95% testování řídicí jednotky motoru by mělo být dokončené použitím HIL simulace. Kosmická a obranná průmyslová odvětví jsou dokonce nucena dodržet pevné vývojové plány. Vývojové programy letadel a pozemních vozidel jsou používány s pomocí osobního počítače a HIL simulace ke uskutečnění návrhu, testování, a integrace souběžně. Společnosti jako Gulfstream a United Defense vykonaly vysoce účinné a úspěšné programy s použitím Simulation-Centric process. 10

11 Vysoká stupeň podstaty systému V mnoha případech, systém je dražší než kvalitní reprodukce, real-time simulátor a proto má vyšší stupeň podstaty. Proto, je ekonomičtější vyvinout a testovat s pomocí HIL simulátora než skutečný systém. Pro výrobce tryskových motorů, HIL simulace je základní část při vývoji motoru. Vývoj digitální řídicí jednotky motoru (FADEC) pro letecké proudové motory je extrémní příklad vysoké stupně podstaty systému. Každý proudový motor může stát miliony dolarů. Přitom HIL simulátor navržený k tomu, aby testoval výrobní linku tryskových motorů, může stát pouze desetinu ceny jednoho motoru. Dřívější proces vývoje způsobeného lidskými potřebami HIL simulace je klíčový krok v procesu rozvoje lidských potřeb, metoda zajištění použitelnosti a konzistence systému s užitím softwarové ergonomie, výzkum a design za účelem splnit lidské potřeby. Pro real-time technologii, vývoj způsobený lidskými potřebami je úkol sbírat použitelnosti dat z man-in-the-loop testu pro součásti, které budou mít lidské rozhraní. Příklad testu použitelnosti je vývoj řízení letu fly-by-wire. řízení letu fly-by-wire vyloučí mechanická zapojení mezi řízením letu a leteckými řídicími plochami. Senzory komunikací zjistí požadovanou letovou odezvu a pak aplikují realistickou silovou zpětnou odezvu k systému řízení motorů fly-by-wire. Chování letového řízení fly-by-wire je definováno algoritmy řízení. Změny v parametru algoritmu lze vysvětlit jako více nebo méně silová odezva od vstupu daného letového řízení. Podobně, změny parametrů algoritmu mohou také vysvětlit jako více nebo méně silová zpětná odezva pro vstup daného letového řízení. "Správné" hodnoty parametru jsou subjektivní míra. Proto, je důležité dostat vstup z velkého počtu testu man-in-the-loop k získání optimální hodnoty parametru. V případě vývoje řízení letu fly-by-wire, HIL simulace je užívána k simulování lidské činnosti. Letový simulátor zahrnuje simulace aerodynamiky, motorový tah, okolní prostředí, dynamika letového řízení a více. Model letového řízení fly-by-wire je připojen k simulátorovi a testovaní piloti vyhodnotí průběh letu zadáváním různých parametrů algoritmu. Alternativa HIL simulace pro lidské činnosti a použitelnost vývoje je umístit model řízení letu do dřívějších leteckých modelů a testovat použitelnost během letové zkoušky. Tento přístup selže, když se změřují tři podmínky uvedená výše. 11

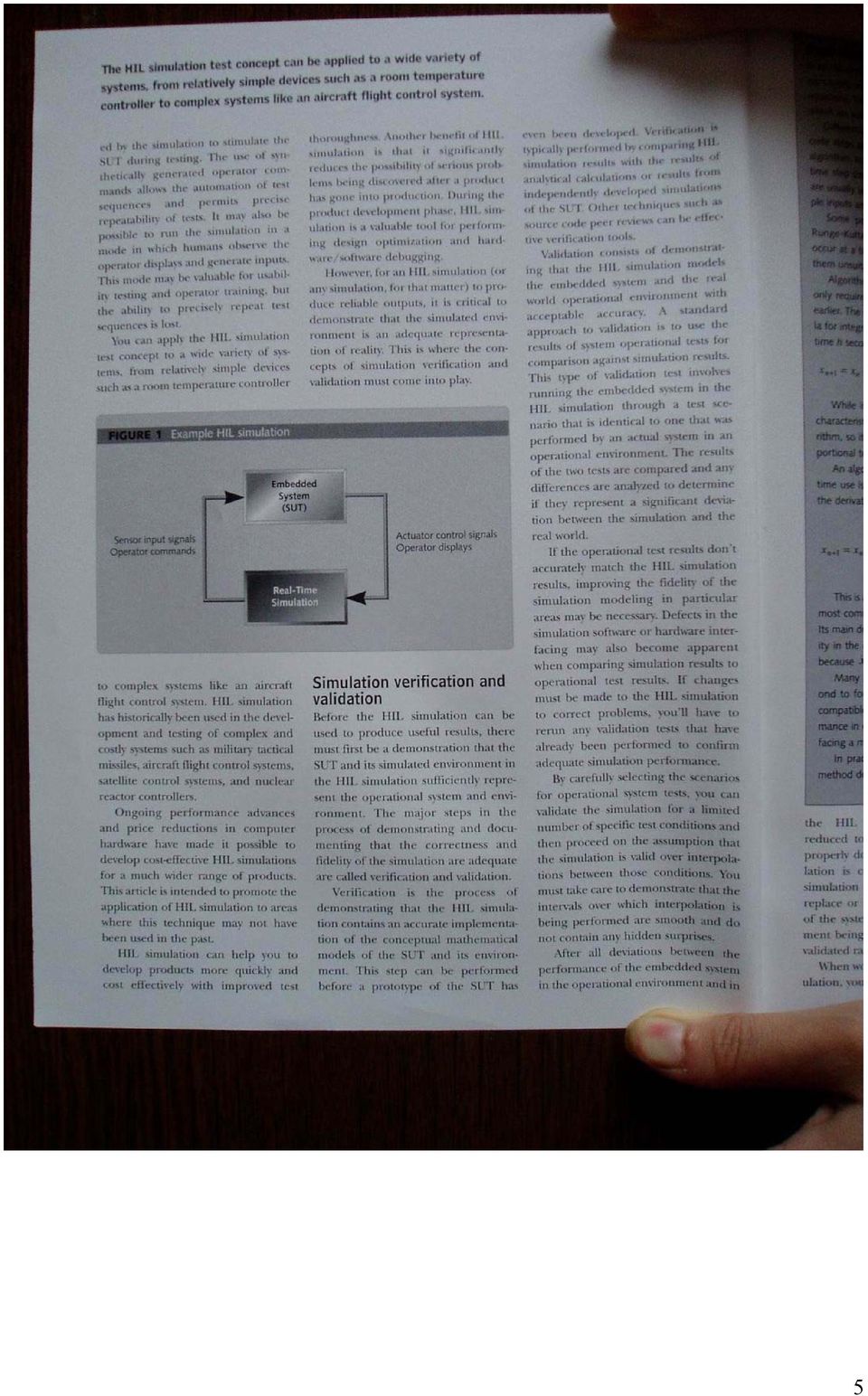
12 Cena: Letová zkouška je extrémně drahá a proto cíl je minimalizovat jakýkoliv vývoj vyskytující s letovou zkouškou. Doba trvání: Vývoj řízení letu s letovou zkouškou bude prodlužovat dobu trvání leteckého vývojového programu. Používání HIL simulace, řízení letu může být vyvinuté značně dříve než je skutečné letadlo k dispozici. Bezpečnost: Používání letové zkoušky pro vývoj kritických součástí jako řízení letu má hlavní význam spočívající ve bezpečnosti. Chyby, vyskytují během testu modelu letové řízení, mohly by vést v reálu k havárií. Všechna tři uvedená kritéria na začátku stránky se zdají, že HIL simulace je, ještě jednou, nejlepší volba pro vývoj lidských činností. 3. Metoda Hardware in the loop Hardware-in-the-loop (HIL) simulace představuje velmi efektivní a účinnou techniku pro testování na systémové úrovni. Používá se nejčastěji ve vývoji a testování vestavených systémů, kdy tyto systémy nemohou být testovány snadno a opakovaně v jejich pracovním prostředí. HIL simulace vyžaduje realizaci real-time simulace, která modeluje část systému ve stadiu testování (SUT) a všechnny její významné interakce s okolím. Simulační proces monitoruje výstupní signály z SUT a vhodně přivede uměle vygenerované vstupní signály do SUT. Výstupní signály ze SUT obvykle obsahují příkazy pro akčního člena a měřitelné informace pro operátora. Vstupy do SUT mohou obsahovat signály ze senzorů a příkazy od operátora. Výstupy z vestaveného systému slouží jako vstupy pro simulaci a simulační proces generuje výstupy, které následně vstupují do vestaveného systému. vstupní signál Testovaný systém - SUT (skutečný hardware) výstupní signál výstupní signál Real-time simulátor (PC, software, ) vstupní signál Obr. Bloková schéma HIL simulace 12

13 HIL simulace hardware a software Pro realizace HIL simulacie, potřebujeme vhodný výpočetní a I/O hardware, právě tak jako software k vykonávání simulační modelování a I/O operace v reálném čase. Hardware pro simulace Hardware použitý v HIL simulaci musí zahrnovat: Počítačový systém schopný vykonávat požadavky simulace ve reálném čase Zařízení na simulačním počítači (nebo na připojeném hostitelském počítači), které umožňuje operátorovi ukládat, analyzovat a zobrazovat data získaná během simulace Nastavení I/O rozhraní mezi simulačním počítačem a testovaným systémem. Real-time požadavky pro simulační počítač závisí na charakteristikách testovaného systému a jeho pracovního prostředí, například na: I/O obnovovacích rychlostech testovaného systému a I/O datových přenosových rychlostech šířce pásma (bandwidth) dynamického systému složeného ze SUTu a jeho prostředí složitosti elementů SUTu a pracovního prostředí modelovaného v simulačním software. I/O zařízení Existují různé kategorie I/O zařízení, které jsou používány ve vestavených systémech. V HIL simulaci, I/O zařízení musím být nainstalovaný v simulačním počítači připojeném ke každému sledovanému I/O portu testovaného systému. I/O rozhraní jsou dostupné z několika zdrojů, které podporují typy signálu, jako: analogový (D/A a A/D převodníky) diskrétní digitální (TTL nebo rozdílový) sériový (RS-232, RS-422) real-time datová sběrnice (MIL-STD-1553, CAN, nebo ARINC-429) přístrojová sběrnice (např. IEEE-488) 13

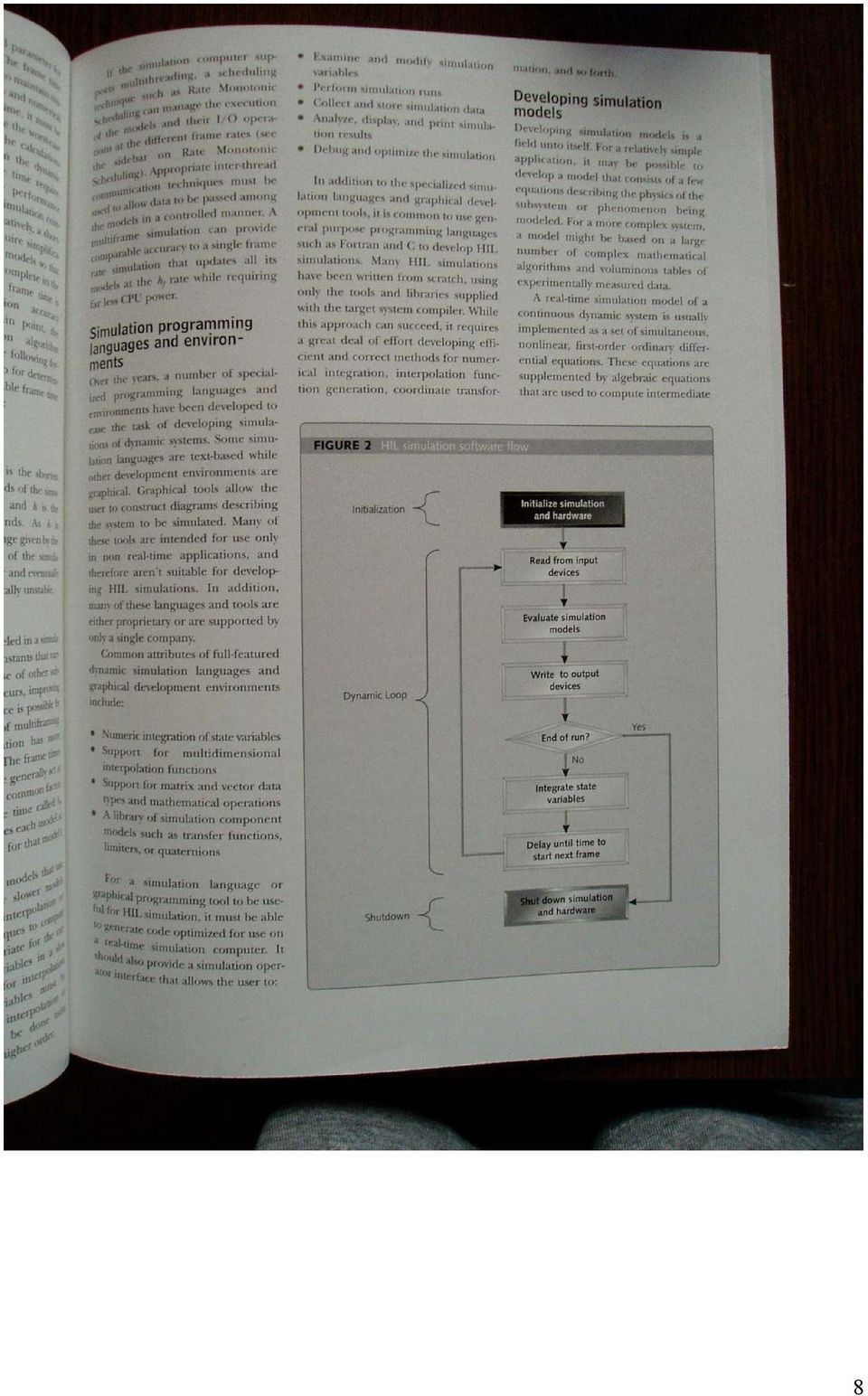
14 síť (např. Ethenet) přístrojový simulátor (pro simulování LVDT převodník, termoelektrické články, apod). Pro testovaný systém s nízkými I/O rychlostmi a simulovaným prostředím, který není moc složitý, obyčejný PC běžící pod non real-time operačním systémem jako Windows NT je schopný provést platnou a užitečnou HIL simulaci. Pro složitý testovaný systém s vysokou I/O rychlostí, je výkonný počítačový systém nezbytný. V těchto aplikacích, potřebujeme více než jen standardní rychlost CPU. Simulační počítač musí také mít přesně stanovený a opakovatelný real-time výpočetní výkon. Výkonné systémy aktualizuje všechny simulační modely a vykonávají I/O operace ve přesných intervalech řadově několika mikrosekund. Simulační počítač musí poskytnout software na systémové úrovni, který podporuje real-time výpočty a nedovolí, aby byl vykonávaný kód zablokovaný na nevhodné cestě. Většina běžných operačních systémů poskytuje pouze dostačující real-time výpočetní výkon pro HIL simulaci s nízkou I/O rychlostí, což je třeba v některých případech použít RTOS nebo vyhrazený real-time softwarové prostředí na simulačním počítači. Požadavky na počítačový systém pro výkonnou real-time simulaci zahrnují: výkonnou výpočetní jednotku podporu zpracování v reálném čase vysokou přenosovou rychlost podporu různých variant I/O zařízení. Software pro simulace Software pro simulaci obsahuje sekce kódu, který vykonává potřebné úkoly během real-time simulace. Základní schéma software pro simulaci je na obr 2. Ze blokového schématu je patrné, že software pro HIL simulace lze rozdělit na tři základní části: inicializace software a externího hardware pro simulace dynamické systém, který zahrnuje I/O zpracování simulačního modelu, a integrování stavových proměnných přerušení práce simulačního software a externího hardware. 14

15 Na spodní vrstvy dynamického systému je intervalový časovač, který se musí zastavit dřív než začne další úkol. Délka tohoto intervalu, známý jako simulační doba (simulation frame time), je kritický parametr pro HIL simulaci. Simulační doba (frame time) musí být krátká dost na to, aby udržovala simulační model přesný a stabilní. Současně musí být zároveň dost dlouhá, aby mohla tolerovat nejhorší časový případ na dokončení všechny výpočty a I/O operace v dynamickém regulačním obvodě. Kratší simulační doba požaduje vyšší výkon simulačního počítačového hardwareu. Eventuálně, kratší simulační doba může požadovat zjednodušení simulačních modelů tak, že jejich výpočty mohou být dokončeny v čase, který je k dispozici. Pokud se simulační doba prodlouží, sníží se přesnost simulace. V jistém bodu se integrační algoritmus stává nestabilní. Následující vzorec je odhad pro stanovení maximální přijatelné simulační doby pro simulační režim: τ s h 20 kde je τ s nejkratší časová konstanta (v sekundách) simulovaného dynamického systému a h je simulační doba (v sekundách). Jakmile je h zvětšený nad rozsahem daným vzorcem, přesnost simulace začne snížit a posléze se regulační obvod stane nestabilní. 15

16 Inicializace Spustění simulace a hardware Čtení ze vstupních zařízení Vyhodnocení simulačního modelu Poslání do výstupních zařízení Dynamický systém Konec? Ano Ne Integrování stavových proměnných Čekání dokud nezačne další simulační doba Ukončení Vypnutí simulace a hardware Obr. Bloková schéma simulačního software 16

Transportation Problem
 Transportation Problem ١ C H A P T E R 7 Transportation Problem The transportation problem seeks to minimize the total shipping costs of transporting goods from m origins (each with a supply s i ) to n
Transportation Problem ١ C H A P T E R 7 Transportation Problem The transportation problem seeks to minimize the total shipping costs of transporting goods from m origins (each with a supply s i ) to n
2. Entity, Architecture, Process
 Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Praktika návrhu číslicových obvodů Dr.-Ing. Martin Novotný Katedra číslicového návrhu Fakulta informačních technologií ČVUT v Praze Miloš
Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Praktika návrhu číslicových obvodů Dr.-Ing. Martin Novotný Katedra číslicového návrhu Fakulta informačních technologií ČVUT v Praze Miloš
DC circuits with a single source
 Název projektu: utomatizace výrobních procesů ve strojírenství a řemeslech egistrační číslo: Z..07/..0/0.008 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň, Klatovská 09 Tento projekt je spolufinancován
Název projektu: utomatizace výrobních procesů ve strojírenství a řemeslech egistrační číslo: Z..07/..0/0.008 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň, Klatovská 09 Tento projekt je spolufinancován
Uživatelská příručka. Xperia P TV Dock DK21
 Uživatelská příručka Xperia P TV Dock DK21 Obsah Úvod...3 Přehled zadní strany stanice TV Dock...3 Začínáme...4 Správce LiveWare...4 Upgradování aplikace Správce LiveWare...4 Použití stanice TV Dock...5
Uživatelská příručka Xperia P TV Dock DK21 Obsah Úvod...3 Přehled zadní strany stanice TV Dock...3 Začínáme...4 Správce LiveWare...4 Upgradování aplikace Správce LiveWare...4 Použití stanice TV Dock...5
Vliv metody vyšetřování tvaru brusného kotouče na výslednou přesnost obrobku
 Vliv metody vyšetřování tvaru brusného kotouče na výslednou přesnost obrobku Aneta Milsimerová Fakulta strojní, Západočeská univerzita Plzeň, 306 14 Plzeň. Česká republika. E-mail: anetam@kto.zcu.cz Hlavním
Vliv metody vyšetřování tvaru brusného kotouče na výslednou přesnost obrobku Aneta Milsimerová Fakulta strojní, Západočeská univerzita Plzeň, 306 14 Plzeň. Česká republika. E-mail: anetam@kto.zcu.cz Hlavním
Automatika na dávkování chemie automatic dosing
 Automatika na dávkování chemie automatic dosing Swimmingpool Technology Autodos 700 Automatické dávkování Autodos Autodos automatic dosing Autodos 700 je jedno-kanálové zaøízení, pro mìøení a dávkování.
Automatika na dávkování chemie automatic dosing Swimmingpool Technology Autodos 700 Automatické dávkování Autodos Autodos automatic dosing Autodos 700 je jedno-kanálové zaøízení, pro mìøení a dávkování.
GUIDELINES FOR CONNECTION TO FTP SERVER TO TRANSFER PRINTING DATA
 GUIDELINES FOR CONNECTION TO FTP SERVER TO TRANSFER PRINTING DATA What is an FTP client and how to use it? FTP (File transport protocol) - A protocol used to transfer your printing data files to the MAFRAPRINT
GUIDELINES FOR CONNECTION TO FTP SERVER TO TRANSFER PRINTING DATA What is an FTP client and how to use it? FTP (File transport protocol) - A protocol used to transfer your printing data files to the MAFRAPRINT
UŽIVATELSKÁ PŘÍRUČKA
 UŽIVATELSKÁ PŘÍRUČKA Plni víry a naděje míříme kupředu. S odhodláním zlepšujeme své dovednosti. Zapomeňte na zklamání, ale nikoli na svůj nevyužitý potenciál. Touha překonat sám sebe a dosáhnout hranice
UŽIVATELSKÁ PŘÍRUČKA Plni víry a naděje míříme kupředu. S odhodláním zlepšujeme své dovednosti. Zapomeňte na zklamání, ale nikoli na svůj nevyužitý potenciál. Touha překonat sám sebe a dosáhnout hranice
Nová éra diskových polí IBM Enterprise diskové pole s nízkým TCO! Simon Podepřel, Storage Sales 2. 2. 2011
 Nová éra diskových polí IBM Enterprise diskové pole s nízkým TCO! Simon Podepřel, Storage Sales 2. 2. 2011 Klíčovéatributy Enterprise Information Infrastructure Spolehlivost Obchodní data jsou stále kritičtější,
Nová éra diskových polí IBM Enterprise diskové pole s nízkým TCO! Simon Podepřel, Storage Sales 2. 2. 2011 Klíčovéatributy Enterprise Information Infrastructure Spolehlivost Obchodní data jsou stále kritičtější,
Moderní technologie dokončování velmi přesných děr vystržováním a její vliv na užitné vlastnosti výrobků
 Moderní technologie dokončování velmi přesných děr vystržováním a její vliv na užitné vlastnosti výrobků Stanislav Fiala 1, Ing. Karel Kouřil, Ph.D 1, Jan Řehoř 2. 1 HAM-FINAL s.r.o, Vlárská 22, 628 00
Moderní technologie dokončování velmi přesných děr vystržováním a její vliv na užitné vlastnosti výrobků Stanislav Fiala 1, Ing. Karel Kouřil, Ph.D 1, Jan Řehoř 2. 1 HAM-FINAL s.r.o, Vlárská 22, 628 00
Mechanika Teplice, výrobní družstvo, závod Děčín TACHOGRAFY. Číslo Servisní Informace Mechanika: 5-2013
 Mechanika Teplice, výrobní družstvo, závod Děčín TACHOGRAFY Servisní Informace Datum vydání: 20.2.2013 Určeno pro : AMS, registrované subj.pro montáž st.měř. Na základě SI VDO č./datum: Není Mechanika
Mechanika Teplice, výrobní družstvo, závod Děčín TACHOGRAFY Servisní Informace Datum vydání: 20.2.2013 Určeno pro : AMS, registrované subj.pro montáž st.měř. Na základě SI VDO č./datum: Není Mechanika
Právní formy podnikání v ČR
 Bankovní institut vysoká škola Praha Právní formy podnikání v ČR Bakalářská práce Prokeš Václav Leden, 2009 Bankovní institut vysoká škola Praha Katedra Bankovnictví Právní formy podnikání v ČR Bakalářská
Bankovní institut vysoká škola Praha Právní formy podnikání v ČR Bakalářská práce Prokeš Václav Leden, 2009 Bankovní institut vysoká škola Praha Katedra Bankovnictví Právní formy podnikání v ČR Bakalářská
Moderní nástroje pro vývoj elektronických řídicích jednotek
 Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
Introduction to MS Dynamics NAV
 Introduction to MS Dynamics NAV (Item Charges) Ing.J.Skorkovský,CSc. MASARYK UNIVERSITY BRNO, Czech Republic Faculty of economics and business administration Department of corporate economy Item Charges
Introduction to MS Dynamics NAV (Item Charges) Ing.J.Skorkovský,CSc. MASARYK UNIVERSITY BRNO, Czech Republic Faculty of economics and business administration Department of corporate economy Item Charges
Litosil - application
 Litosil - application The series of Litosil is primarily determined for cut polished floors. The cut polished floors are supplied by some specialized firms which are fitted with the appropriate technical
Litosil - application The series of Litosil is primarily determined for cut polished floors. The cut polished floors are supplied by some specialized firms which are fitted with the appropriate technical
Height Adjustable Shock Absorbers for MacPherson Strut Type Suspension. Výškově stavitelné tlumiče pro zavěšení MacPherson
 Název funkčního vzorku v originále Height Adjustable Shock Absorbers for MacPherson Strut Type Suspension Název funkčního vzorku česky (anglicky) Výškově stavitelné tlumiče pro zavěšení MacPherson Obrázek
Název funkčního vzorku v originále Height Adjustable Shock Absorbers for MacPherson Strut Type Suspension Název funkčního vzorku česky (anglicky) Výškově stavitelné tlumiče pro zavěšení MacPherson Obrázek
Enabling Intelligent Buildings via Smart Sensor Network & Smart Lighting
 Enabling Intelligent Buildings via Smart Sensor Network & Smart Lighting Petr Macháček PETALIT s.r.o. 1 What is Redwood. Sensor Network Motion Detection Space Utilization Real Estate Management 2 Building
Enabling Intelligent Buildings via Smart Sensor Network & Smart Lighting Petr Macháček PETALIT s.r.o. 1 What is Redwood. Sensor Network Motion Detection Space Utilization Real Estate Management 2 Building
PRODEJNÍ EAUKCE A JEJICH ROSTOUCÍ SEX-APPEAL SELLING EAUCTIONS AND THEIR GROWING APPEAL
 PRODEJNÍ EAUKCE A JEJICH ROSTOUCÍ SEX-APPEAL SELLING EAUCTIONS AND THEIR GROWING APPEAL Ing. Jan HAVLÍK, MPA tajemník Městského úřadu Žďár nad Sázavou Chief Executive Municipality of Žďár nad Sázavou CO
PRODEJNÍ EAUKCE A JEJICH ROSTOUCÍ SEX-APPEAL SELLING EAUCTIONS AND THEIR GROWING APPEAL Ing. Jan HAVLÍK, MPA tajemník Městského úřadu Žďár nad Sázavou Chief Executive Municipality of Žďár nad Sázavou CO
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49
 Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
Mikrokvadrotor: Návrh,
 KONTAKT 2011 Mikrokvadrotor: Návrh, Modelování,, Identifikace a Řízení Autor: Jaromír r Dvořák k (md( md@unicode.cz) Vedoucí: : Zdeněk Hurák (hurak@fel.cvut.cz) Katedra řídicí techniky FEL ČVUT Praha 26.5.2011
KONTAKT 2011 Mikrokvadrotor: Návrh, Modelování,, Identifikace a Řízení Autor: Jaromír r Dvořák k (md( md@unicode.cz) Vedoucí: : Zdeněk Hurák (hurak@fel.cvut.cz) Katedra řídicí techniky FEL ČVUT Praha 26.5.2011
PC/104, PC/104-Plus. 196 ept GmbH I Tel. +49 (0) / I Fax +49 (0) / I I
 / I Fax +49 (0) / I I") E L E C T R O N I C C O N N E C T O R S 196 ept GmbH I Tel. +49 (0) 88 61 / 25 01 0 I Fax +49 (0) 88 61 / 55 07 I E-Mail sales@ept.de I www.ept.de Contents Introduction 198 Overview 199 The Standard 200
E L E C T R O N I C C O N N E C T O R S 196 ept GmbH I Tel. +49 (0) 88 61 / 25 01 0 I Fax +49 (0) 88 61 / 55 07 I E-Mail sales@ept.de I www.ept.de Contents Introduction 198 Overview 199 The Standard 200
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49
 Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
SenseLab. z / from CeMaS. Otevřené sledování senzorů, ovládání zařízení, nahrávání a přehrávání ve Vaší laboratoři
 CeMaS, Marek Ištvánek, 22.2.2015 SenseLab z / from CeMaS Otevřené sledování senzorů, ovládání zařízení, nahrávání a přehrávání ve Vaší laboratoři Open Sensor Monitoring, Device Control, Recording and Playback
CeMaS, Marek Ištvánek, 22.2.2015 SenseLab z / from CeMaS Otevřené sledování senzorů, ovládání zařízení, nahrávání a přehrávání ve Vaší laboratoři Open Sensor Monitoring, Device Control, Recording and Playback
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49
 Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
Střední průmyslová škola strojnická Olomouc, tř.17. listopadu 49 Výukový materiál zpracovaný v rámci projektu Výuka moderně Registrační číslo projektu: CZ.1.07/1.5.00/34.0205 Šablona: III/2 Anglický jazyk
Jste připraveni na Průmysl 4.0?
 Draft Jste připraveni na Průmysl 4.0? Okolo roku 2000 se v IT začínal prosazovat nový pojem e-business Podaří-li se plně a v celé šíři firmy integrovat procesy a navázat je na klíčové obchodní partnery,
Draft Jste připraveni na Průmysl 4.0? Okolo roku 2000 se v IT začínal prosazovat nový pojem e-business Podaří-li se plně a v celé šíři firmy integrovat procesy a navázat je na klíčové obchodní partnery,
FINÁLNÍ ÚPRAVY IX. Doc. Ing. Michal Vik, Ph.D.
 FINÁLNÍ ÚPRAVY IX Doc. Ing. Michal Vik, Ph.D. Charakteristika jednotlivých fází hoření I 1. Reakce do zapálení uvolňování mezimolekulárních vazeb mezi Tg a Tm, dochází k depolymeraci a pyrolýze degradace
FINÁLNÍ ÚPRAVY IX Doc. Ing. Michal Vik, Ph.D. Charakteristika jednotlivých fází hoření I 1. Reakce do zapálení uvolňování mezimolekulárních vazeb mezi Tg a Tm, dochází k depolymeraci a pyrolýze degradace
EXACT DS OFFICE. The best lens for office work
 EXACT DS The best lens for office work EXACT DS When Your Glasses Are Not Enough Lenses with only a reading area provide clear vision of objects located close up, while progressive lenses only provide
EXACT DS The best lens for office work EXACT DS When Your Glasses Are Not Enough Lenses with only a reading area provide clear vision of objects located close up, while progressive lenses only provide
USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING
 USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING Eva Minaříková Institute for Research in School Education, Faculty of Education, Masaryk University Structure of the presentation What can we as teachers
USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING Eva Minaříková Institute for Research in School Education, Faculty of Education, Masaryk University Structure of the presentation What can we as teachers
CHAPTER 5 MODIFIED MINKOWSKI FRACTAL ANTENNA
 CHAPTER 5 MODIFIED MINKOWSKI FRACTAL ANTENNA &KDSWHUSUHVHQWVWKHGHVLJQDQGIDEULFDW LRQRIPRGLILHG0LQNRZVNLIUDFWDODQWHQQD IRUZLUHOHVVFRPPXQLFDWLRQ7KHVLPXODWHG DQGPHDVXUHGUHVXOWVRIWKLVDQWHQQDDUH DOVRSUHVHQWHG
CHAPTER 5 MODIFIED MINKOWSKI FRACTAL ANTENNA &KDSWHUSUHVHQWVWKHGHVLJQDQGIDEULFDW LRQRIPRGLILHG0LQNRZVNLIUDFWDODQWHQQD IRUZLUHOHVVFRPPXQLFDWLRQ7KHVLPXODWHG DQGPHDVXUHGUHVXOWVRIWKLVDQWHQQDDUH DOVRSUHVHQWHG
The Over-Head Cam (OHC) Valve Train Computer Model
 Valve Train Computer Model") The Over-Head Cam (OHC) Valve Train Computer Model Radek Tichanek, David Fremut Robert Cihak Josef Bozek Research Center of Engine and Content Introduction Work Objectives Model Description Cam Design
The Over-Head Cam (OHC) Valve Train Computer Model Radek Tichanek, David Fremut Robert Cihak Josef Bozek Research Center of Engine and Content Introduction Work Objectives Model Description Cam Design
2N LiftIP. IO Extender. Communicator for Lifts. Version
 2N LiftIP Communicator for Lifts IO Extender Version 2.4.0 www.2n.cz Description The IO extender helps you extend 2N LiftIP with 1 input and 2 outputs. The purpose of the input is to cancel the rescue
2N LiftIP Communicator for Lifts IO Extender Version 2.4.0 www.2n.cz Description The IO extender helps you extend 2N LiftIP with 1 input and 2 outputs. The purpose of the input is to cancel the rescue
Jak importovat profily do Cura (Windows a
 Jak importovat profily do Cura (Windows a macos) Written By: Jakub Dolezal 2019 manual.prusa3d.com/ Page 1 of 10 Step 1 Stažení Cura profilů V tomto návodu se dozvíte, jak importovat a aktivovat nastavení
Jak importovat profily do Cura (Windows a macos) Written By: Jakub Dolezal 2019 manual.prusa3d.com/ Page 1 of 10 Step 1 Stažení Cura profilů V tomto návodu se dozvíte, jak importovat a aktivovat nastavení
WORKSHEET 1: LINEAR EQUATION 1
 WORKSHEET 1: LINEAR EQUATION 1 1. Write down the arithmetical problem according the dictation: 2. Translate the English words, you can use a dictionary: equations to solve solve inverse operation variable
WORKSHEET 1: LINEAR EQUATION 1 1. Write down the arithmetical problem according the dictation: 2. Translate the English words, you can use a dictionary: equations to solve solve inverse operation variable
APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ
 APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ Organisation name / Název organizace: AEROTAXI s.r.o., Nad Vinným potokem 1149/2, 101 11 Praha 10 Vršovice Places of business / Provozovny: letiště Praha - Kbely, Mladoboleslavská
APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ Organisation name / Název organizace: AEROTAXI s.r.o., Nad Vinným potokem 1149/2, 101 11 Praha 10 Vršovice Places of business / Provozovny: letiště Praha - Kbely, Mladoboleslavská
Project Life-Cycle Data Management
 Project Life-Cycle Data Management 1 Contend UJV Introduction Problem definition Input condition Proposed solution Reference Conclusion 2 UJV introduction Research, design and engineering company 1000
Project Life-Cycle Data Management 1 Contend UJV Introduction Problem definition Input condition Proposed solution Reference Conclusion 2 UJV introduction Research, design and engineering company 1000
Téma 8. Náklady kapitálu. Kapitálová struktura a její optimalizace
 Téma 8. Náklady kapitálu. Kapitálová struktura a její optimalizace 1. Náklady kapitálu a jejich kvantifikace 2. Kapitálová struktura podniku 3. Působení finanční páky 4. Optimální kapitálová struktura
Téma 8. Náklady kapitálu. Kapitálová struktura a její optimalizace 1. Náklady kapitálu a jejich kvantifikace 2. Kapitálová struktura podniku 3. Působení finanční páky 4. Optimální kapitálová struktura
Gymnázium, Brno, Slovanské nám. 7 WORKBOOK. Mathematics. Teacher: Student:
 WORKBOOK Subject: Teacher: Student: Mathematics.... School year:../ Conic section The conic sections are the nondegenerate curves generated by the intersections of a plane with one or two nappes of a cone.
WORKBOOK Subject: Teacher: Student: Mathematics.... School year:../ Conic section The conic sections are the nondegenerate curves generated by the intersections of a plane with one or two nappes of a cone.
MODELOVÁNÍ A MĚŘENÍ DEFORMACE V TAHOKOVU
 . 5. 9. 007, Podbanské MODELOVÁNÍ A MĚŘENÍ DEFORMACE V TAHOKOVU Zbyšek Nový, Michal Duchek, Ján Džugan, Václav Mentl, Josef Voldřich, Bohuslav Tikal, Bohuslav Mašek 4 COMTES FHT s.r.o., Lobezská E98, 00
. 5. 9. 007, Podbanské MODELOVÁNÍ A MĚŘENÍ DEFORMACE V TAHOKOVU Zbyšek Nový, Michal Duchek, Ján Džugan, Václav Mentl, Josef Voldřich, Bohuslav Tikal, Bohuslav Mašek 4 COMTES FHT s.r.o., Lobezská E98, 00
Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů
 Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů Design and implementation of algorithms for adaptive control of stationary robots Marcel Vytečka 1, Karel Zídek 2 Abstrakt Článek
Návrh a implementace algoritmů pro adaptivní řízení průmyslových robotů Design and implementation of algorithms for adaptive control of stationary robots Marcel Vytečka 1, Karel Zídek 2 Abstrakt Článek
Vývoj a testování elektronických řídicích jednotek pro automobily
 Vývoj a testování elektronických řídicích jednotek pro automobily Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2011 Automobilová elektronika Praha, 7. 6. 2011 Jiří Sehnal, Humusoft spol. s
Vývoj a testování elektronických řídicích jednotek pro automobily Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2011 Automobilová elektronika Praha, 7. 6. 2011 Jiří Sehnal, Humusoft spol. s
Obsah&/&Content& Všeobecné)podmínky)(v)češtině)) Terms)and)Conditions)(in)english)) )
podmínky)(v)češtině)) Terms)and)Conditions)(in)english)) )") Obsah/Content Všeobecnépodmínky(včeštině TermsandConditions(inenglish Všeobecnépodmínky používáníwebovýchstránekneighboursuniverseasouvisejícíchslužebazásadyochrany osobníchdat A.! PodmínkyužíváníwebovýchstránekNeighboursUniverseasouvisejícíchslužeb
Obsah/Content Všeobecnépodmínky(včeštině TermsandConditions(inenglish Všeobecnépodmínky používáníwebovýchstránekneighboursuniverseasouvisejícíchslužebazásadyochrany osobníchdat A.! PodmínkyužíváníwebovýchstránekNeighboursUniverseasouvisejícíchslužeb
Úvod do datového a procesního modelování pomocí CASE Erwin a BPwin
 Úvod do datového a procesního modelování pomocí CASE Erwin a BPwin (nově AllFusion Data Modeller a Process Modeller ) Doc. Ing. B. Miniberger,CSc. BIVŠ Praha 2009 Tvorba datového modelu Identifikace entit
Úvod do datového a procesního modelování pomocí CASE Erwin a BPwin (nově AllFusion Data Modeller a Process Modeller ) Doc. Ing. B. Miniberger,CSc. BIVŠ Praha 2009 Tvorba datového modelu Identifikace entit
 - 1 2 1 2 3 4 3 4 5 5 For further information please contact your local Epson office or visit www.epson-europe.com EPSON Europe B.V. Otto-Hahn-Str. 4 D-40670 Meerbusch Tel. +49 (0)1805/377661 All features
- 1 2 1 2 3 4 3 4 5 5 For further information please contact your local Epson office or visit www.epson-europe.com EPSON Europe B.V. Otto-Hahn-Str. 4 D-40670 Meerbusch Tel. +49 (0)1805/377661 All features
Tento materiál byl vytvořen v rámci projektu Operačního programu Vzdělávání pro konkurenceschopnost.
 Tento materiál byl vytvořen v rámci projektu Operačního programu Vzdělávání pro konkurenceschopnost. Projekt MŠMT ČR Číslo projektu Název projektu školy Klíčová aktivita III/2 EU PENÍZE ŠKOLÁM CZ.1.07/1.4.00/21.2146
Tento materiál byl vytvořen v rámci projektu Operačního programu Vzdělávání pro konkurenceschopnost. Projekt MŠMT ČR Číslo projektu Název projektu školy Klíčová aktivita III/2 EU PENÍZE ŠKOLÁM CZ.1.07/1.4.00/21.2146
CHAIN TRANSMISSIONS AND WHEELS
 Second School Year CHAIN TRANSMISSIONS AND WHEELS A. Chain transmissions We can use chain transmissions for the transfer and change of rotation motion and the torsional moment. They transfer forces from
Second School Year CHAIN TRANSMISSIONS AND WHEELS A. Chain transmissions We can use chain transmissions for the transfer and change of rotation motion and the torsional moment. They transfer forces from
Uživatelská příručka. USB Charger UCH20
 Uživatelská příručka USB Charger UCH20 Obsah Úvod...3 USB Charger popis... 3 Používání nabíječky USB... 4 Nabíjení zařízení... 4 Právní informace... 5 Declaration of Conformity...6 2 Úvod USB Charger popis
Uživatelská příručka USB Charger UCH20 Obsah Úvod...3 USB Charger popis... 3 Používání nabíječky USB... 4 Nabíjení zařízení... 4 Právní informace... 5 Declaration of Conformity...6 2 Úvod USB Charger popis
Instalace Pokyny pro instalaci v operačním systému Windows XP / Vista / Win7 / Win8
 Instalace Pokyny pro instalaci v operačním systému Windows XP / Vista / Win7 / Win8 1. Stáhněte si instalační program HOST makro engine z oficiálního webu IABYTE. 2. Spusťte instalační program a postupujte
Instalace Pokyny pro instalaci v operačním systému Windows XP / Vista / Win7 / Win8 1. Stáhněte si instalační program HOST makro engine z oficiálního webu IABYTE. 2. Spusťte instalační program a postupujte
Hi-Res Audio/DNC Headset MDR-NC750
 Uživatelská příručka Hi-Res Audio/DNC Headset MDR-NC750 Obsah Začínáme...3 Úvod...3 Přehled... 3 Základy práce...4 Nošení náhlavní soupravy...4 Připojení náhlavní soupravy k vašemu zařízení... 4 Nastavení
Uživatelská příručka Hi-Res Audio/DNC Headset MDR-NC750 Obsah Začínáme...3 Úvod...3 Přehled... 3 Základy práce...4 Nošení náhlavní soupravy...4 Připojení náhlavní soupravy k vašemu zařízení... 4 Nastavení
2. Začlenění HCI do životního cyklu software
 Jan Schmidt 2011 Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze Zimní semestr 2011/12 EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU: INVESTUJENE DO VAŠÍ BUDOUCNOSTI
Jan Schmidt 2011 Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze Zimní semestr 2011/12 EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU: INVESTUJENE DO VAŠÍ BUDOUCNOSTI
IBM Security. Trusteer Apex. Michal Martínek 23.9.2015. 2014 IBM Corporation. 2014 1 IBM Corporation
 Trusteer Apex Michal Martínek 23.9.2015 2014 1 IBM Corporation Proč útočit na koncová zařízení? Anti Virus Zaměstnanec Jednoduché Firewall IPS Antivirus Śifrování Jednoduché Malware Ukradené přihlašovací
Trusteer Apex Michal Martínek 23.9.2015 2014 1 IBM Corporation Proč útočit na koncová zařízení? Anti Virus Zaměstnanec Jednoduché Firewall IPS Antivirus Śifrování Jednoduché Malware Ukradené přihlašovací
ELEKTROMOTORY SÉRIE CHT CHT ELECTRIC MOTORS
 ELEKTROMOTORY SÉRIE CHT CHT ELECTRIC MOTORS ÚVOD CHT série elektromotor byla vyvinuta pro p ipojení na p evodovky a z tohoto d vodu mají veškeré mechanické a elektrické charakteristiky p izp sobeny práv
ELEKTROMOTORY SÉRIE CHT CHT ELECTRIC MOTORS ÚVOD CHT série elektromotor byla vyvinuta pro p ipojení na p evodovky a z tohoto d vodu mají veškeré mechanické a elektrické charakteristiky p izp sobeny práv
Porovnání předpovídané zátěže se zátěží skutečnou (podle modelu III-C BMP ČHMÚ) Martin Novák 1,2
 Martin Novák 1,2") Porovnání předpovídané zátěže se zátěží skutečnou (podle modelu III-C BMP ČHMÚ) Martin Novák 1,2 1 ČHMÚ, pobočka Ústí n.l., PS 2, 400 11 Ústí n.l., novakm@chmi.cz 2 PřF UK Praha, KFGG, Albertov 6, 128
Porovnání předpovídané zátěže se zátěží skutečnou (podle modelu III-C BMP ČHMÚ) Martin Novák 1,2 1 ČHMÚ, pobočka Ústí n.l., PS 2, 400 11 Ústí n.l., novakm@chmi.cz 2 PřF UK Praha, KFGG, Albertov 6, 128
1 INTRODUCTION 2 TESTING HARDWARE
 Sborník vědeckých prací Vysoké školy báňské - Technické univerzity Ostrava číslo 1, rok 2008, ročník LIV, řada strojní článek č. 1577 Jan BABJAK *, Petr NOVÁK ** MAXON DC MOTOR CONTROL BY MF624 I/O CARD
Sborník vědeckých prací Vysoké školy báňské - Technické univerzity Ostrava číslo 1, rok 2008, ročník LIV, řada strojní článek č. 1577 Jan BABJAK *, Petr NOVÁK ** MAXON DC MOTOR CONTROL BY MF624 I/O CARD
Konfigurace řídicího systému technikou Hardware In The Loop
 1 Portál pre odborné publikovanie ISSN 1338-0087 Konfigurace řídicího systému technikou Hardware In The Loop Szymeczek Michal Elektrotechnika, Študentské práce 20.10.2010 Bakalářská práce se zabývá konfigurací
1 Portál pre odborné publikovanie ISSN 1338-0087 Konfigurace řídicího systému technikou Hardware In The Loop Szymeczek Michal Elektrotechnika, Študentské práce 20.10.2010 Bakalářská práce se zabývá konfigurací
SPECIFICATION FOR ALDER LED
 SPECIFICATION FOR ALDER LED MODEL:AS-D75xxyy-C2LZ-H1-E 1 / 13 Absolute Maximum Ratings (Ta = 25 C) Parameter Symbol Absolute maximum Rating Unit Peak Forward Current I FP 500 ma Forward Current(DC) IF
SPECIFICATION FOR ALDER LED MODEL:AS-D75xxyy-C2LZ-H1-E 1 / 13 Absolute Maximum Ratings (Ta = 25 C) Parameter Symbol Absolute maximum Rating Unit Peak Forward Current I FP 500 ma Forward Current(DC) IF
Digitální učební materiál
 Digitální učební materiál Projekt Šablona Tématická oblast DUM č. CZ.1.07/1.5.00/34.0415 Inovujeme, inovujeme III/2 Inovace a zkvalitnění výuky prostřednictvím ICT (DUM) Anglický jazyk pro obor podnikání
Digitální učební materiál Projekt Šablona Tématická oblast DUM č. CZ.1.07/1.5.00/34.0415 Inovujeme, inovujeme III/2 Inovace a zkvalitnění výuky prostřednictvím ICT (DUM) Anglický jazyk pro obor podnikání
POPIS TUN TAP. Vysvetlivky: Modre - překlad Cervene - nejasnosti Zelene -poznamky. (Chci si ujasnit o kterem bloku z toho schematu se mluvi.
 Vysvetlivky: Modre - překlad Cervene - nejasnosti Zelene -poznamky POPIS TUN TAP (Chci si ujasnit o kterem bloku z toho schematu se mluvi.) VAS MODEL OpenVPN MUJ MODEL funkce virtuálního sítového rozhrani
Vysvetlivky: Modre - překlad Cervene - nejasnosti Zelene -poznamky POPIS TUN TAP (Chci si ujasnit o kterem bloku z toho schematu se mluvi.) VAS MODEL OpenVPN MUJ MODEL funkce virtuálního sítového rozhrani
Fytomineral. Inovace Innovations. Energy News 04/2008
 Energy News 4 Inovace Innovations 1 Fytomineral Tímto Vám sdělujeme, že již byly vybrány a objednány nové lahve a uzávěry na produkt Fytomineral, které by měly předejít únikům tekutiny při přepravě. První
Energy News 4 Inovace Innovations 1 Fytomineral Tímto Vám sdělujeme, že již byly vybrány a objednány nové lahve a uzávěry na produkt Fytomineral, které by měly předejít únikům tekutiny při přepravě. První
CCD 90 MV Cameras (Firewire) CCD 90 MV Cameras (GigE) CCD 90 MV Cameras (USB 2.0)
 CCD 90 MV Cameras (GigE) CCD 90 MV Cameras (USB 2.0)") CCD 90 MV Cameras (Firewire) PL-B952F-R PL-B953F-R PL-B954F-R PL-B954HF-R PL-B955F-R PL-B955HF-R PL-B956F-R PL-B957F-R PL-B958F-R PL-B959F-R CCD 90 MV Cameras (GigE) PL-B954G-R PL-B954HG-R PL-B955G-R PL-B955HG-R
CCD 90 MV Cameras (Firewire) PL-B952F-R PL-B953F-R PL-B954F-R PL-B954HF-R PL-B955F-R PL-B955HF-R PL-B956F-R PL-B957F-R PL-B958F-R PL-B959F-R CCD 90 MV Cameras (GigE) PL-B954G-R PL-B954HG-R PL-B955G-R PL-B955HG-R
Využití hybridní metody vícekriteriálního rozhodování za nejistoty. Michal Koláček, Markéta Matulová
 Využití hybridní metody vícekriteriálního rozhodování za nejistoty Michal Koláček, Markéta Matulová Outline Multiple criteria decision making Classification of MCDM methods TOPSIS method Fuzzy extension
Využití hybridní metody vícekriteriálního rozhodování za nejistoty Michal Koláček, Markéta Matulová Outline Multiple criteria decision making Classification of MCDM methods TOPSIS method Fuzzy extension
Počítačové kognitivní technologie ve výuce geometrie
 Počítačové kognitivní technologie ve výuce geometrie Jiří Vaníček Univerzita Karlova v Praze - Pedagogická fakulta 2009 Počítačové kognitivní technologie ve výuce geometrie Abstrakt Kniha se zabývá využíváním
Počítačové kognitivní technologie ve výuce geometrie Jiří Vaníček Univerzita Karlova v Praze - Pedagogická fakulta 2009 Počítačové kognitivní technologie ve výuce geometrie Abstrakt Kniha se zabývá využíváním
UPM3 Hybrid Návod na ovládání Čerpadlo UPM3 Hybrid 2-5 Instruction Manual UPM3 Hybrid Circulation Pump 6-9
 www.regulus.cz UPM3 Hybrid Návod na ovládání Čerpadlo UPM3 Hybrid 2-5 Instruction Manual UPM3 Hybrid Circulation Pump 6-9 CZ EN UPM3 Hybrid 1. Úvod V továrním nastavení čerpadla UPM3 Hybrid je profil PWM
www.regulus.cz UPM3 Hybrid Návod na ovládání Čerpadlo UPM3 Hybrid 2-5 Instruction Manual UPM3 Hybrid Circulation Pump 6-9 CZ EN UPM3 Hybrid 1. Úvod V továrním nastavení čerpadla UPM3 Hybrid je profil PWM
Gymnázium, Brno, Slovanské nám. 7, SCHEME OF WORK Mathematics SCHEME OF WORK. cz
 SCHEME OF WORK Subject: Mathematics Year: first grade, 1.X School year:../ List of topisc # Topics Time period Introduction, repetition September 1. Number sets October 2. Rigtht-angled triangle October,
SCHEME OF WORK Subject: Mathematics Year: first grade, 1.X School year:../ List of topisc # Topics Time period Introduction, repetition September 1. Number sets October 2. Rigtht-angled triangle October,
DATA SHEET. BC516 PNP Darlington transistor. technický list DISCRETE SEMICONDUCTORS Apr 23. Product specification Supersedes data of 1997 Apr 16
 zákaznická linka: 840 50 60 70 DISCRETE SEMICONDUCTORS DATA SHEET book, halfpage M3D186 Supersedes data of 1997 Apr 16 1999 Apr 23 str 1 Dodavatel: GM electronic, spol. s r.o., Křižíkova 77, 186 00 Praha
zákaznická linka: 840 50 60 70 DISCRETE SEMICONDUCTORS DATA SHEET book, halfpage M3D186 Supersedes data of 1997 Apr 16 1999 Apr 23 str 1 Dodavatel: GM electronic, spol. s r.o., Křižíkova 77, 186 00 Praha
Analýza ustáleného teplotního pole výfukového ventilu
 Analýza ustáleného teplotního pole výfukového ventilu E. Dobešová, J.Skácel Anotace: Pri spalování jsou soucásti motoru vystaveny pomerne vysokým teplotám. V hlave válcu je teplotou nejvíce zatížen výfukový
Analýza ustáleného teplotního pole výfukového ventilu E. Dobešová, J.Skácel Anotace: Pri spalování jsou soucásti motoru vystaveny pomerne vysokým teplotám. V hlave válcu je teplotou nejvíce zatížen výfukový
Obrábění robotem se zpětnovazební tuhostí
 Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
VYSOKÁ ŠKOLA HOTELOVÁ V PRAZE 8, SPOL. S R. O.
 VYSOKÁ ŠKOLA HOTELOVÁ V PRAZE 8, SPOL. S R. O. Návrh konceptu konkurenceschopného hotelu v době ekonomické krize Diplomová práce 2013 Návrh konceptu konkurenceschopného hotelu v době ekonomické krize Diplomová
VYSOKÁ ŠKOLA HOTELOVÁ V PRAZE 8, SPOL. S R. O. Návrh konceptu konkurenceschopného hotelu v době ekonomické krize Diplomová práce 2013 Návrh konceptu konkurenceschopného hotelu v době ekonomické krize Diplomová
Czech Republic. EDUCAnet. Střední odborná škola Pardubice, s.r.o.
 Czech Republic EDUCAnet Střední odborná škola Pardubice, s.r.o. ACCESS TO MODERN TECHNOLOGIES Do modern technologies influence our behavior? Of course in positive and negative way as well Modern technologies
Czech Republic EDUCAnet Střední odborná škola Pardubice, s.r.o. ACCESS TO MODERN TECHNOLOGIES Do modern technologies influence our behavior? Of course in positive and negative way as well Modern technologies
HIL simulace Radek Havlík, Jan Svoboda
 HIL simulace Radek Havlík, Jan Svoboda Mladá Boleslav, 13.11.2009 HIL simulace Hardware In the Loop (HIL) simulace- testovaný objekt je připojen k simulátoru, který v reálném čase simuluje skutečné elektrické
HIL simulace Radek Havlík, Jan Svoboda Mladá Boleslav, 13.11.2009 HIL simulace Hardware In the Loop (HIL) simulace- testovaný objekt je připojen k simulátoru, který v reálném čase simuluje skutečné elektrické
IPR v H2020. Matěj Myška myska@ctt.muni.cz
 IPR v H2020 Matěj Myška myska@ctt.muni.cz Zdroje [1] KRATĚNOVÁ, J. a J. Kotouček. Duševní vlastnictví v projektech H2020. Technologické centrum AV ČR, Edice Vademecum H2020, 2015. Dostupné i online: http://www.tc.cz/cs/publikace/publikace/seznampublikaci/dusevni-vlastnictvi-v-projektech-horizontu-2020
IPR v H2020 Matěj Myška myska@ctt.muni.cz Zdroje [1] KRATĚNOVÁ, J. a J. Kotouček. Duševní vlastnictví v projektech H2020. Technologické centrum AV ČR, Edice Vademecum H2020, 2015. Dostupné i online: http://www.tc.cz/cs/publikace/publikace/seznampublikaci/dusevni-vlastnictvi-v-projektech-horizontu-2020
Diagnostics. The Range of Solutions
 Diagnostics The Range of Solutions Diagnostics The Range of Solutions DS100E PDA DS150E VCI & SOFTWARE ONLY Laptop not included user provides own hardware solution DS350E CONVERTIBLE PC DS350E TABLET New
Diagnostics The Range of Solutions Diagnostics The Range of Solutions DS100E PDA DS150E VCI & SOFTWARE ONLY Laptop not included user provides own hardware solution DS350E CONVERTIBLE PC DS350E TABLET New
Koncept stroje. Jak rozhýbat náčrtek stroje. unrestricted Siemens AG 2018
 Koncept stroje Jak rozhýbat náčrtek stroje Unrestricted Siemens AG 2018 Tomáš Froněk Virtuální zprovoznění S řídicím systémem propojeným se simulačními nástroji Simulace jednotlivých automatizačních uzlů
Koncept stroje Jak rozhýbat náčrtek stroje Unrestricted Siemens AG 2018 Tomáš Froněk Virtuální zprovoznění S řídicím systémem propojeným se simulačními nástroji Simulace jednotlivých automatizačních uzlů
Potřebujete mít vaše IS ve shodě s legislativou? Bc. Stanislava Birnerová
 Potřebujete mít vaše IS ve shodě s legislativou? Bc. Stanislava Birnerová Direct Account Manager sbirnerova@novell.com Komplexnost, Nátlak, Nulová tolerance Nařízení Business Continuity Interní hrozby
Potřebujete mít vaše IS ve shodě s legislativou? Bc. Stanislava Birnerová Direct Account Manager sbirnerova@novell.com Komplexnost, Nátlak, Nulová tolerance Nařízení Business Continuity Interní hrozby
5) Proveďte záznam této AIP AMDT do GEN ) Record this AIP AMDT to GEN 0.2.
 Proveďte záznam této AIP AMDT do GEN ) Record this AIP AMDT to GEN 0.2.") ČESKÁ REPUBLIKA ŘÍZENÍ LETOVÉHO PROVOZU ČR, s.p. Letecká informační služba AIR NAVIGATION SERVICES OF THE C.R. Aeronautical Information Service Navigační 787 252 61 Jeneč AIP AMDT 369/19 PUBLICATION DATE:
ČESKÁ REPUBLIKA ŘÍZENÍ LETOVÉHO PROVOZU ČR, s.p. Letecká informační služba AIR NAVIGATION SERVICES OF THE C.R. Aeronautical Information Service Navigační 787 252 61 Jeneč AIP AMDT 369/19 PUBLICATION DATE:
Co je uvnitř - senzory a přístrojová technika v NXT robotech. Pavel Ripka katedra měření ČVUT http://measure.feld.cvut.cz
 Co je uvnitř - senzory a přístrojová technika v NXT robotech Pavel Ripka katedra měření ČVUT http://measure.feld.cvut.cz Co je to senzor? A sensor is a device that measures a physical quantity and converts
Co je uvnitř - senzory a přístrojová technika v NXT robotech Pavel Ripka katedra měření ČVUT http://measure.feld.cvut.cz Co je to senzor? A sensor is a device that measures a physical quantity and converts
Petr Bednář managing director
 PRESENTATION Petr Bednář managing director Company profile Designing office Petr Bednář Tebeco was established in 2004. At the beginning the company was mainly focusing on mechanical-engineering consulting
PRESENTATION Petr Bednář managing director Company profile Designing office Petr Bednář Tebeco was established in 2004. At the beginning the company was mainly focusing on mechanical-engineering consulting
Transfer inovácií 20/2011 2011
 OBRÁBĚNÍ LASEREM KALENÉHO POVRCHU Ing. Miroslav Zetek, Ph.D. Ing. Ivana Česáková Ing. Josef Sklenička Katedra technologie obrábění Univerzitní 22, 306 14 Plzeň e-mail: mzetek@kto.zcu.cz Abstract The technology
OBRÁBĚNÍ LASEREM KALENÉHO POVRCHU Ing. Miroslav Zetek, Ph.D. Ing. Ivana Česáková Ing. Josef Sklenička Katedra technologie obrábění Univerzitní 22, 306 14 Plzeň e-mail: mzetek@kto.zcu.cz Abstract The technology
APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ
 Organisation name / Název organizace: Place of business / Provozovna: Reference / Číslo oprávnění: APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ LOM PRAHA, s.p., Tiskařská 8, 100 38 Praha 10 - Malešice Tiskařská
Organisation name / Název organizace: Place of business / Provozovna: Reference / Číslo oprávnění: APPROVAL SCHEDULE / ROZSAH OPRÁVNĚNÍ LOM PRAHA, s.p., Tiskařská 8, 100 38 Praha 10 - Malešice Tiskařská
PACIFIC AEROSPACE CORPORATION letadlo model PAC 750 XL Tento PZZ je vydáván pro výrobek transferovaný pod působnost EASA
 PŘÍKAZ K ZACHOVÁNÍ LETOVÉ ZPŮSOBILOSTI ÚŘAD PRO CIVILNÍ LETECTVÍ ČESKÁ REPUBLIKA Sekce technická letiště Ruzyně, 160 08 Praha 6 tel: 233320922, fax: 220562270 Číslo: DCA/750XL/3A Datum účinnosti: 29. listopad
PŘÍKAZ K ZACHOVÁNÍ LETOVÉ ZPŮSOBILOSTI ÚŘAD PRO CIVILNÍ LETECTVÍ ČESKÁ REPUBLIKA Sekce technická letiště Ruzyně, 160 08 Praha 6 tel: 233320922, fax: 220562270 Číslo: DCA/750XL/3A Datum účinnosti: 29. listopad
20 ka / 1 s (dle typu cívky) přirozené
 přirozené") KATALOG CATALOGUE 051/03/2013 VÝKONOVÝ REAKTOR NN, NASTAVITELNÝ LOW VOLTAGE POWER REACTOR COIL, ADJUSTABLE pro napětí do 1000 V for voltages up to 1000V TYP LNN ISO 9001:2009 ISO 14001:2005 VŠEOBECNĚ Výkonový
KATALOG CATALOGUE 051/03/2013 VÝKONOVÝ REAKTOR NN, NASTAVITELNÝ LOW VOLTAGE POWER REACTOR COIL, ADJUSTABLE pro napětí do 1000 V for voltages up to 1000V TYP LNN ISO 9001:2009 ISO 14001:2005 VŠEOBECNĚ Výkonový
Aktivita CLIL Chemie I.
 Škola: Gymnázium Bystřice nad Pernštejnem Jméno vyučujícího: Mgr. Marie Dřínovská Aktivita CLIL Chemie I. Název aktivity: Uhlíkový cyklus v přírodě Carbon cycle Předmět: Chemie Ročník, třída: kvinta Jazyk
Škola: Gymnázium Bystřice nad Pernštejnem Jméno vyučujícího: Mgr. Marie Dřínovská Aktivita CLIL Chemie I. Název aktivity: Uhlíkový cyklus v přírodě Carbon cycle Předmět: Chemie Ročník, třída: kvinta Jazyk
Biosensors and Medical Devices Development at VSB Technical University of Ostrava
 VŠB TECHNICAL UNIVERSITY OF OSTRAVA FACULTY OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE Biosensors and Medical Devices Development at VSB Technical University of Ostrava Ing. Martin Černý Ph.D. and
VŠB TECHNICAL UNIVERSITY OF OSTRAVA FACULTY OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE Biosensors and Medical Devices Development at VSB Technical University of Ostrava Ing. Martin Černý Ph.D. and
Theme 6. Money Grammar: word order; questions
 Theme 6 Money Grammar: word order; questions Čas potřebný k prostudování učiva lekce: 8 vyučujících hodin Čas potřebný k ověření učiva lekce: 45 minut KLÍNSKÝ P., MÜNCH O., CHROMÁ D., Ekonomika, EDUKO
Theme 6 Money Grammar: word order; questions Čas potřebný k prostudování učiva lekce: 8 vyučujících hodin Čas potřebný k ověření učiva lekce: 45 minut KLÍNSKÝ P., MÜNCH O., CHROMÁ D., Ekonomika, EDUKO
Laboratorní mostový jeřáb. The Laboratory Overhead Crane 2012 FUNKČNÍ VZOREK. Název funkčního vzorku v originále. Název funkčního vzorku anglicky
 Název funkčního vzorku v originále Laboratorní mostový jeřáb Název funkčního vzorku anglicky The Laboratory Overhead Crane Obrázek 1: Fotografie funkčního vzorku Laboratorní mostový jeřáb (4DOHC) Autoři
Název funkčního vzorku v originále Laboratorní mostový jeřáb Název funkčního vzorku anglicky The Laboratory Overhead Crane Obrázek 1: Fotografie funkčního vzorku Laboratorní mostový jeřáb (4DOHC) Autoři
Postup objednávky Microsoft Action Pack Subscription
 Postup objednávky Microsoft Action Pack Subscription DŮLEŽITÉ: Pro objednání MAPS musíte být členem Microsoft Partner Programu na úrovni Registered Member. Postup registrace do Partnerského programu naleznete
Postup objednávky Microsoft Action Pack Subscription DŮLEŽITÉ: Pro objednání MAPS musíte být členem Microsoft Partner Programu na úrovni Registered Member. Postup registrace do Partnerského programu naleznete
Ing. Pavel Matoušek Technical Division Director
 APPROVAL SCHEDULE ROZSAH OPRÁVNĚNÍ Organisation name / Název organizace: Aeroklub České republiky o. s., U mlýna 3, 141 00 Praha 4 Place of business/provozovna: Pracoviště technických služeb AeČR Hosín,
APPROVAL SCHEDULE ROZSAH OPRÁVNĚNÍ Organisation name / Název organizace: Aeroklub České republiky o. s., U mlýna 3, 141 00 Praha 4 Place of business/provozovna: Pracoviště technických služeb AeČR Hosín,
skluzné kompresní Šrouby dynamic Hip And condylar screws
 skluzné kompresní Šrouby dynamic Hip And condylar screws f NÁSTROJE A IMPLANTÁTY PRO TRAUMATOLOGII INSTRUMENTS AND IMPLANTS FOR TRAUMATOLOGY 211 F Skluzné kompresní šrouby Dynamic Hip and Condylar Screws
skluzné kompresní Šrouby dynamic Hip And condylar screws f NÁSTROJE A IMPLANTÁTY PRO TRAUMATOLOGII INSTRUMENTS AND IMPLANTS FOR TRAUMATOLOGY 211 F Skluzné kompresní šrouby Dynamic Hip and Condylar Screws
ACOUSTIC EMISSION SIGNAL USED FOR EVALUATION OF FAILURES FROM SCRATCH INDENTATION
 AKUSTICKÁ EMISE VYUŽÍVANÁ PŘI HODNOCENÍ PORUŠENÍ Z VRYPOVÉ INDENTACE ACOUSTIC EMISSION SIGNAL USED FOR EVALUATION OF FAILURES FROM SCRATCH INDENTATION Petr Jiřík, Ivo Štěpánek Západočeská univerzita v
AKUSTICKÁ EMISE VYUŽÍVANÁ PŘI HODNOCENÍ PORUŠENÍ Z VRYPOVÉ INDENTACE ACOUSTIC EMISSION SIGNAL USED FOR EVALUATION OF FAILURES FROM SCRATCH INDENTATION Petr Jiřík, Ivo Štěpánek Západočeská univerzita v
TechoLED H A N D B O O K
 TechoLED HANDBOOK Světelné panely TechoLED Úvod TechoLED LED světelné zdroje jsou moderním a perspektivním zdrojem světla se širokými možnostmi použití. Umožňují plnohodnotnou náhradu žárovek, zářivkových
TechoLED HANDBOOK Světelné panely TechoLED Úvod TechoLED LED světelné zdroje jsou moderním a perspektivním zdrojem světla se širokými možnostmi použití. Umožňují plnohodnotnou náhradu žárovek, zářivkových
Mobilní počítač Dolphin TM 6100. Stručný návod k použití
 Mobilní počítač Dolphin TM 6100 Stručný návod k použití Mobilní počítač Dolphin 6100 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6100 (terminál) Hlavní bateriový
Mobilní počítač Dolphin TM 6100 Stručný návod k použití Mobilní počítač Dolphin 6100 Pro začátek Ověřte si, že balení obsahuje následující položky: Mobilní počítač Dolphin 6100 (terminál) Hlavní bateriový
Výuka odborného předmětu z elektrotechniky na SPŠ Strojní a Elektrotechnické
 Jihočeská univerzita v Českých Budějovicích Pedagogická fakulta Oddělení celoživotního vzdělávání Závěrečná práce Výuka odborného předmětu z elektrotechniky na SPŠ Strojní a Elektrotechnické Vypracoval:
Jihočeská univerzita v Českých Budějovicích Pedagogická fakulta Oddělení celoživotního vzdělávání Závěrečná práce Výuka odborného předmětu z elektrotechniky na SPŠ Strojní a Elektrotechnické Vypracoval:
Caroline Glendinning Jenni Brooks Kate Gridley. Social Policy Research Unit University of York
 Caroline Glendinning Jenni Brooks Kate Gridley Social Policy Research Unit University of York Growing numbers of people with complex and severe disabilities Henwood and Hudson (2009) for CSCI: are the
Caroline Glendinning Jenni Brooks Kate Gridley Social Policy Research Unit University of York Growing numbers of people with complex and severe disabilities Henwood and Hudson (2009) for CSCI: are the
Škola: Střední škola obchodní, České Budějovice, Husova 9. Inovace a zkvalitnění výuky prostřednictvím ICT
 Škola: Střední škola obchodní, České Budějovice, Husova 9 Projekt MŠMT ČR: EU PENÍZE ŠKOLÁM Číslo projektu: CZ.1.07/1.5.00/34.0536 Název projektu školy: Výuka s ICT na SŠ obchodní České Budějovice Šablona
Škola: Střední škola obchodní, České Budějovice, Husova 9 Projekt MŠMT ČR: EU PENÍZE ŠKOLÁM Číslo projektu: CZ.1.07/1.5.00/34.0536 Název projektu školy: Výuka s ICT na SŠ obchodní České Budějovice Šablona
GENERAL INFORMATION MATCH: ALSA PRO ARENA MASTERS DATE: TIME SCHEDULE:
 GENERAL INFORMATION MATCH: ALSA PRO ARENA MASTERS DATE: 22.9. - 23.9.2018 TIME SCHEDULE: Mainmatch 1 - Saturday 22.9. registration: 22.9.2018-9.00h first shot: 22.9.2018-10.00h Mainmatch 2 - Sunday 23.9.
GENERAL INFORMATION MATCH: ALSA PRO ARENA MASTERS DATE: 22.9. - 23.9.2018 TIME SCHEDULE: Mainmatch 1 - Saturday 22.9. registration: 22.9.2018-9.00h first shot: 22.9.2018-10.00h Mainmatch 2 - Sunday 23.9.
Lisování nerozebíratelných spojů rámových konstrukcí
 Abstract Lisování nerozebíratelných spojů rámových konstrukcí Zbyšek Nový 1, Miroslav Urbánek 1 1 Comtes FTH Lobezská E981, 326 00 Plzeň, Česká republika, znovy@comtesfht.cz, murbanek@comtesfht.cz The
Abstract Lisování nerozebíratelných spojů rámových konstrukcí Zbyšek Nový 1, Miroslav Urbánek 1 1 Comtes FTH Lobezská E981, 326 00 Plzeň, Česká republika, znovy@comtesfht.cz, murbanek@comtesfht.cz The
Jana Pattynová Cloud Computing 2015, 8. prosince 2015. Cloud Computing Právní a regulační rámec
 Jana Pattynová Cloud Computing 2015, 8. prosince 2015 Cloud Computing Právní a regulační rámec Cloud Computing: poznaná nutnost Ekonomické výhody cloudu jej činí každodenní realitou Cloudová řešení jsou
Jana Pattynová Cloud Computing 2015, 8. prosince 2015 Cloud Computing Právní a regulační rámec Cloud Computing: poznaná nutnost Ekonomické výhody cloudu jej činí každodenní realitou Cloudová řešení jsou
Database systems. Normal forms
 Database systems Normal forms An example of a bad model SSN Surnam OfficeNo City Street No ZIP Region President_of_ Region 1001 Novák 238 Liteň Hlavní 10 26727 Středočeský Rath 1001 Novák 238 Bystřice
Database systems Normal forms An example of a bad model SSN Surnam OfficeNo City Street No ZIP Region President_of_ Region 1001 Novák 238 Liteň Hlavní 10 26727 Středočeský Rath 1001 Novák 238 Bystřice
výrobky Z plastů plastic products
 výrobky Z plastů plastic products 285 MEDIN, a.s. NÁSTROJE PRO CHIRURGII INSTRUMENTS FOR SURGERY 443 285 Výrobky z plastů Plastic Products 444 NÁSTROJE PRO CHIRURGII INSTRUMENTS FOR SURGERY MEDIN, a.s.
výrobky Z plastů plastic products 285 MEDIN, a.s. NÁSTROJE PRO CHIRURGII INSTRUMENTS FOR SURGERY 443 285 Výrobky z plastů Plastic Products 444 NÁSTROJE PRO CHIRURGII INSTRUMENTS FOR SURGERY MEDIN, a.s.
POLOHOVÁNÍ ULTRAZVUKOVÉHO SENZORU
 1 VŠB - Technická Univerzita Ostrava, Katedra automatizační techniky a řízení Příspěvek popisuje zařízení realizující lineární posuv ultrazvukového snímače. Mechanismem realizujícím lineární posuv je kuličkový
1 VŠB - Technická Univerzita Ostrava, Katedra automatizační techniky a řízení Příspěvek popisuje zařízení realizující lineární posuv ultrazvukového snímače. Mechanismem realizujícím lineární posuv je kuličkový
www.alu-sv.com BLATNÍKY A BEDNY NA NÁŘADÍ MUDGUARDS AND TOOLBOXES 5.1 5.2 5.3 5.4 5.5
 5.1 CZ LATNÍKY A EDNY NA NÁŘADÍ 5.1 latníky 5.2 edny na nářadí 5.3 Kanystry na vodu a schránky na hasící přístroje 5.4 Zakládací klíny 5.5 Držáky rezervy a navijáky EN 5.1 Mudguards 5.2 Toolboxes 5.3 Plastic
5.1 CZ LATNÍKY A EDNY NA NÁŘADÍ 5.1 latníky 5.2 edny na nářadí 5.3 Kanystry na vodu a schránky na hasící přístroje 5.4 Zakládací klíny 5.5 Držáky rezervy a navijáky EN 5.1 Mudguards 5.2 Toolboxes 5.3 Plastic