PASIVNÍ RADIOLOKACE VYUŽITÍ MULTILATERACE V CIVILNÍCH A VOJENSKÝCH APLIKACÍCH. Přednáška VUT FEKT, Brno
|
|
|
- Alois Kučera
- před 8 lety
- Počet zobrazení:
Transkript
1 PASIVNÍ RADIOLOKACE VYUŽITÍ MULTILATERACE V CIVILNÍCH A VOJENSKÝCH APLIKACÍCH Přednáška VUT FEKT, Brno

2 PŘEDSTAVENÍ Adam Novozámský Training specialist Operation expert ERA a.s. Průmyslová 387, Pardubice web mail Page 2
3 OBSAH Představení společnosti Základní údaje Historie Významné milníky Produkty společnosti MSS / NEO SQUID VERA NG Řízení letového provozu Prostředí ŘLP PSR SSR ADS-B GPS Multilaterace Princip Přesnost Eliptická metoda Princip MSS Zpracování signálů Instalace Benefity VERA-NG Princip Aplikace PCL Page 3
4 PŘEDSTAVENÍ SPOLEČNOSTI ERA a.s. je průkopníkem multilaterace a patří mezi nejvýznamnější světové dodavatele NextGen řešení pro řízení letového provozu ve vojenských bezpečnostních a letištních aplikacích. Zakladatel průmyslu a trhu multilaterace 52 let tradice a zkušeností Více než 100 instalací celosvětově V 59 zemích na 5 kontinentech 340 profesionálních zaměstnanců Vlastní výzkum a vývoj 100 % česká společnost Page 4

5 Page 5 ERA VE SVĚTĚ

6 HISTORIE TESLA předchůdce společnosti ERA Velká státní společnost Výrobce spotřebitelské i průmyslové elektroniky Spolupráce s tehdejší ČSLA VE SPOLUPRÁCI S ČSLA PRP-1 Kopáč KRTP-81 Ramona KRTP-81M Ramona-M KRTP-86 Tamara KRTP-91 Tamara-M Page 6

7 HISTORIE PRP-1 KOPÁČ Přesný Radiotechnický Pátrač Korelační Pátrač První použití TDOA principu R&D ostré použití Trackování až 8 cílů S, L, X band 4 vozidla Praga V3S Page 7

8 HISTORIE KRTP-81 Ramona Komplex Radiotechnického Průzkumu Radiotechničeskaja Aparatura Medlenoj Nastrojky NATO code Soft ball R&D 1979 ostré použití 1-8 GHz Počítač 64 kb operační paměti Trackování až 20 cílů 13 vozidel Tatra-148 Page 8

9 HISTORIE KRTP-86 Tamara Komplex Radiotechnického Průzkumu Techničeskuja Aparatura Medlenoj Avtamatičeskoj Razvedky NATO code Trash bin R&D 1986 ostré použití 0,8-18 GHz 14 8bit počítačů Jednodušší sestavení Trackování až 72 cílů 8 vozidel Tatra T-815 8x8 and 6x6 Page 9

10 Page 10 MILNÍKY
11 ERA PRODUKTY

12 MULTI-SENSOR SURVEILLANCE SYSTEM Variabilní, vyspělý a certifikovaný sledovací systém pracující na principu ADS-B a MULTILATERACE určený pro: Page 12 Letištní sledování Přesné přistávání Oblastní navádění Sledování rozsáhlých území Přesné měření výšky

13 NEO NOVÁ ŘADA MSS Méně robustní řešení pro využití v místech s dobrou infrastrukturou Nižší náklady, levnější provoz Letištní systémy pro monitorování pohybu letadel na povrchu Systémy dalekého pokrytí Page 13

14 SQUID POZEMNÍ SLEDOVÁNÍ Více než 6000 squidů nasazeno na letištích po celém světě Sledování pozemních cílů na letištích Kompatibilní s ADS-B a MLAT systémy třetích stran Provozuschopný za všech povětrnostních podmínek Page 14

15 VERA NG VIDĚT A NEBÝT VIDĚN Pasivní sledovací systém Dlouhodobě poskytuje ELINT informace Obtížně zarušitelný systém Online trackování pozemních, vzdušných i námořních cílů ve 3D prostoru Vysoce mobilní systém Page 15
16 RADIOLOKACE V ŘÍZENÍ LETOVÉHO PROVOZU

17 ŘLP ŘÍZENÍ LETOVÉHO PROVOZU Air Traffic Control Hlavním posláním řízení letového provozu je poskytovat provozní služby, které zabrání srážkám mezi letadly, při udržení plynulého, rychlého a spořádaného průběhu letového provozu. Největší důraz je kladen na bezpečnost letového provozu. Nástoje pro zabezpečení letového provozu jsou primární a sekundární radary, multilaterační sledovací systémy, ADS-B systémy. Page 17
18 ŘLP ŘÍZENÍ LETOVÉHO PROVOZU Air Traffic Control Předpisy, pokyny, rady a informace pro zajištění bezpečného a ekonomického leteckého provozu Řídící věž TWR Zajišťuje pohyb letadel po zemi, vzlety, přistání a navedení do přistávacích / odletových koridorů Středisko přiblížení APP Zajišťující bezpečné přílety / odlety k letištím Oblastní středisko ACC Poskytuje letové provozní služby převážně letadlům letícím v letových hladinách. Page 18
19 NÁSTROJE ŘLP ATC SLEDOVACÍ SYSTÉMY Primární (Nekooperující cíle) Sekundární Mód A/C/S Kooperující cíle ADS Kooperující cíle, závislé na GNSS Primární radary Přehledové radary Sekundární radary Multilaterační sledovací systémy VTS - Vehicle Tracking System - Sledování vozidel ADS-B - sledovací systémy Page 19
 jež se nacházejí ve směru kam je energie vyslána.")
20 PSR PRIMÁRNÍ RADAR PSR Primární radar je klasický aktivní radar, kdy vysílač (pozemní nebo palubní) vysílá mikrovlnnou energii ve formě impulzů nebo stálé vlny a v čase mimo vysílání přijímá odrazy od objektů (letadel, vzducholodí, mraků, země ) jež se nacházejí ve směru kam je energie vyslána. Page 20

21 PSR PRIMÁRNÍ RADAR PSR Page 21

22 SSR SEKUNDÁRNÍ RADAR SSR Sekundární radary potřebují pro svou funkci transpondéry, které jsou umístěny v letadle. Transpondér je radiový přijímač a vysílač. Na frekvenci 1030 MHz přijímá dotazy ze sekundárního radaru a na frekvenci 1090 MHz odpovídá sekundárnímu radaru. Signál odpovědi obsahuje kódovanou informaci s požadovanými daty. Fungování sekundárního radaru je postaveno na vojenském principu rozlišení přítel nepřítel, který byl vyvinut za druhé světové války. Page 22


23 SSR SEKUNDÁRNÍ RADAR SSR Page S Page 23
24 SSR MÓDY SEKUNDÁRNÍCH RADARŮ CIVILNÍ REŽIMY mód A identifikace letu, čtyřmístné oktalové číslo mód C informace o barometrické výšce mód S datová zpráva, různý obsah VOJENSKÉ REŽIMY mód 1, 2 označení činnosti, příslušnosti mód 3 identický s civilním módem A, označuje se souhrnně jako 3/A mód 4 kryptografické rozlišení přítel - nepřítel Page 24
25 SIGNÁLY SIGNÁLY HISTORIE Módy A/C se používají dodnes Mód S se také používá jako datalink pro ADS B Page 25
26 SIGNÁLY ATCRBS Air Traffic Control Radar Beacon System (Mode A/C) Page 26
27 SIGNÁLY STRUKTURA PULZŮ MÓDU A/C DOTAZ Mód Vzdálenost P1 P3 Účel A 8 µs identifikace C 21 µs výška S 3.5 µs různá data 2µs 8µs / 21µs Page 27 P1 P2 P3
28 SIGNÁLY POTLAČENÍ BOČNÍCH LALOKŮ (SSR) DOTAZ Pokud je amplituda signálu z hlavního svazku větší než z potlačovaného, odpověď přišla z hlavního laloku a zpracuje se. Pokud je amplituda z potlačovaného svazku větší než z hlavního laloku, odpověď přišla z postranního laloku a nezpracuje se. Používá pouze SSR, nikoliv MLAT Page 28
29 SIGNÁLY STRUKTURA PULZŮ MÓDU A/C ODPOVĚĎ 0,45µs 1,45µs 20,3µs F1 C1 A1 C2 A2 C4 A4 X B1 D1 B2 D2 B4 D4 F2 Page 29
30 SIGNÁLY MÓD S ADRESNÉ DOTAZOVÁNÍ (ROLL CALL) Bloky dat obsahují Comm A identifikaci / dotaz na výšku Každé dotazování obsahuje adresu / pole parity Page 30
31 SIGNÁLY MÓD S NEADRESNÉ DOTAZOVÁNÍ (ALL CALL) Mód A / C / S All call Mód S transpondéry odpovídají ve formátu módu S Využívá SSR Mód A / C (pouze) All call Mód S transpondéry neodpovídají Využívá MLAT Page 31
32 SIGNÁLY MÓD S ODPOVĚDI Preambule módu S Odpověď módu S Page 32
 Lepší integrita dat využitím mechanismu kontroly parity Kódování výšky v rozlišení 25 stop S-módová adresa je jednou z 16,777,214 adres (24 bitů) vydávaných mezinárodní")
33 SIGNÁLY MÓD S Adresa Selektivní, unikátní dotaz umožňující individuální adresování dotazů (každý letecký prostředek má přiřazenou unikátní 24-bit. adresu) Lepší integrita dat využitím mechanismu kontroly parity Kódování výšky v rozlišení 25 stop S-módová adresa je jednou z 16,777,214 adres (24 bitů) vydávaných mezinárodní autoritou leteckého provozu ICAO Page 33

34 SIGNÁLY MÓD S Squitter Režim S-módového transpondéru Odpověď transpondéru, která není vyvolána dotazem. Cíl s transpondérem vysílajícím signál ve formě squitteru může být detekován, aniž by byl dotazován, což je u módu A / C vyloučené. Page 34
35 SIGNÁLY MÓD S Downlink formáty Mode A/C - Alpha/Charlie Mode A (Alpha) Mode C (Charlie) Mode A Identity Barometric Altitude Mode S - Mode Select Mode S squitter (DF 11) Mode S extended squitter (DF17) Mode S non-transponder extended squitter (DF18) Mode S short ACAS (DF0) Mode S long ACAS (DF16) Mode S short surveillance (DF4) Mode S short surveillance (DF5) Mode S long surveillance (DF20) Mode S long surveillance (DF21) Mode S Identity, GND flag Mode S Identity, GND flag, ADS-B information Mode S Identity, GND flag, ADS-B information Mode S Identity, GND flag, Barometric Altitude Mode S Identity, GND flag, Barometric Altitude, air-air coordination Mode S Identity, GND flag, Barometric Altitude Mode S Identity, Mode A Identity, GND flag Mode S Identity, GND flag, Barometric Altitude, Data Link (e.g. Callsign) Mode S Identity, Mode A Identity, GND flag, Data Link (e.g. Callsign) Page 35
36 ADS-B
37 ADS-B ADS-B Automatic Dependent Surveillance Broadcast Automatic Vysílá automaticky Dependent Závislý (vyžaduje data z GNSS) Surveillance Sledovací (poskytuje data jako radar) Broadcast Vysílá data leteckým i pozemním přístrojům ke zpracování ADS-B informace je vysílána pomocí S-módové zprávy, která se zároveň využívá jako vstupní signál pro multilateraci. Page 37
 Longitude (encoded) Velocity Page 38")
38 ADS-B Extended squitter Vysílá zprávy o poloze (ADS-B) Závislý na výškoměru a informacích GPS Collision avoidance GPS satellites Collision avoidance Zpráva obsahuje: Aircraft ID Altitude Latitude (encoded) Longitude (encoded) Velocity Page 38 ATC ADS-B SSR
39 ADS-B ADS-B Datalink Mode S extended squitter (DF17) Mode S Identity, GND flag, Barometric or GNSS Altitude, ADS-B position, Callsign etc. Mode S non-transponder extended squitter (DF18) Mode S Identity, GND flag, Barometric or GNSS Altitude, ADS-B position, Callsign etc. Page 39
. Další část datového pole o velikosti 56 bitů je nosič ADS-B zprávy, záleží na obsahu CA pole.")
40 ADS-B ADS-B DF17 Obsahem datového pole DF je decimální číslo 17, což je v binárním kódu Následující tři bity (tzv. Capability, nebo CA ) je číslo značící podtyp ADS-B zprávy. Lze rozlišit až osm různých typů ADS-B zpráv. Dalších 24 bitů je unikátní AA Adresa letadla (ICAO). Další část datového pole o velikosti 56 bitů je nosič ADS-B zprávy, záleží na obsahu CA pole. Tato zpráva může obsahovat: typ letadla a jeho identifikace dekódovaná zeměpisná šířka dekódovaná zeměpisná délka Page 40

41 GNSS GPS Global Positioning System Jedním ze zdrojů informace o pozici pro ADS-B je GPS. Celý systém GPS lze rozdělit do 3 segmentů: kosmický, řídící, uživatelský Kosmický segment GPS je aktuálně složen z 32 satelitů, které se pohybují v šesti kruhových drahách na oběžné dráze země (20 350km). Na každé dráze jsou umístěny minimálně 4 satelity Dráhy satelitů jsou nastaveny tak, že minimálně šest satelitů jsou vždy v přímé viditelnosti z jakéhokoliv bodu na povrchu země. Page 41
.")
42 GPS Satelity vysílají svou pozici s přesným UTC časem (jsou vybaveny přesnými atomovými hodinami). Přijímače měří čas přijetí signálu svými vlastními měřícími jednotkami (ne tak přesnými - pseudorange). 42
43 GPS Kvůli rozdílu času se zdá být správná pozice B, ale ve skutečnosti je správná pozice A. Aby bylo možné vyhnout se těmto nepřesnostem, musel by mít každý přijímač atomové hodiny anebo použít jednoduchý princip na další obrazovce. 43
44 GPS PRINCIP GPS Přidáním jednoho dalšího satelitu do výpočtu vytvoříme průniký pseudovzdáleností (pseudorange) B (anebo nejsou žádné průniky, pokud je offset negativní). Je možné určit správnou pozici A (posunutím pseudovzdáleností tak, aby se protly právě v jednom bodě). V 3D prostoru jsou třeba 4 satelity pro správnou pozici. x i x 2 + y i y 2 + z i z 2 = d i = (τ mi t) c = D i b i = 1, 2, 3, 4 44
45 GPS GPS Přesnost Zdroje nepřesností Ionosfrérické efekty +/- 5m Odchylka oběžné dráhy satelitu +/- 2,5m Chyba systémových hodin satelitu +/- 2m Vícecestný (multipath) efekt +/- 1m Troposférické effecty +/- 0,5m Chyba ve výpočtech +/- 1m Vše dohromady vytvoří +/- 15m nepřesnost (maximální) na ideálně nastavených přístrojích. Page 45
 a blok IIF vysílá třetí civilní signál L5 (safety-of-life). Plná použitelnost se předpokládá na rok 2018.")
46 GPS Všechny satelity vysílají minimálně na dvou frekvencích, GHz (L1 signál) a GHz (L2 signál). Navíc staelity bloku IR-M vysílají druhý civilní signál L2C (komerční) a blok IIF vysílá třetí civilní signál L5 (safety-of-life). Plná použitelnost se předpokládá na rok Blok III (s novým L1C kódem) se mělo začít implementovat v roce ms/gps/modernization/civ ilsignals/ 46
47 MULTIPATH Signál se odráží od stěn, řek atd. 47 Firmware GPS většinou obsahuje mechanismy jak předcházet negativním vlivům ve většině případů.
 díky integraci externích informací do procesu Satellite-based augmentation system (SBAS) Ground-based")
48 ZVYŠOVÁNÍ GNSS ZPŘESŇOVÁNÍ PŘESNOSTI GNSS Metoda zlepšení atributů navigačního systému (např. přesnost) díky integraci externích informací do procesu Satellite-based augmentation system (SBAS) Ground-based augmentation system (GBAS) 48


49 SATELLITE-BASED AUGMENTATION SYSTEM (SBAS) Systémy se skládají z mnoha pozemních stanic na přesně zaměřených místech. Pozemní stanice měří signál GNSS nebo i další faktory, které mají vliv na příjem uživatelů. Používáním těchto měření jsou vytvářeny zprávy s informacemi, které jsou potom posílány do satelitů a tyto satelity poté vysílají informace ke koncovým uživatelům. EGNOS (Evropa) WAAS (America) StarFire (commercial John Deere) 49
50 VOR VOR VHF omnidirectional range Všesměrový radiomaják Jedna všesměrová a jedna rotující anténa (30 o/s) Amplitudová modulace signálu Určení azimutu letadla od vysílače Page 50
51 DME DME Distance Measuring Equipment Obrácený princip SSR Dotazuje se letadlo, transpondér je na zemi Označuje se též jako pozemní maják Výpočet vzdálenosti Page 51
52 MULTILATERACE
53 PRINCIP MULTILATERACE MULTILATERACE MLAT je způsob určení polohy cíle na základě rozdílu času přijetí signálu (TDOA Time Difference Of Arrival) mezi jednotlivými stanicemi. Page 53
54 PRINCIP MULTILATERACE HYPERBOLA KONSTRUKCE Hyperbola je množina všech bodů v rovině o konstantním rozdílu vzdáleností od dvou pevných ohnisek. Page 54 F1X - F2X =2a
![PRINCIP MULTILATERACE signály SSR (RXS) (RXS) d1-d2 = konstanta (RXS) (RXS) (RXS) [X,Y] HYPERBOLA - množina bodů, které mají konstantní rozdíl vzdáleností (d1-d2)od](/docs-images/55/37747270/images/55-0.jpg "jejích dvou ohnisek (F1, F2). POZICE- rozšířeno o jeden přjímač, princip z obrázku nahoře nám dá 2 (3) hyperboly. Pozice cíle se nachází v průniku těchto hyperbol.")
55 PRINCIP MULTILATERACE signály SSR (RXS) (RXS) d1-d2 = konstanta (RXS) (RXS) (RXS) [X,Y] HYPERBOLA - množina bodů, které mají konstantní rozdíl vzdáleností (d1-d2)od jejích dvou ohnisek (F1, F2). POZICE- rozšířeno o jeden přjímač, princip z obrázku nahoře nám dá 2 (3) hyperboly. Pozice cíle se nachází v průniku těchto hyperbol. Page 55

56 PRINCIP MULTILATERACE HYPERBOLA Přijímací stanice RX3 Cíl RX 3 TOA 06:00 RX1 TOA 10:00 RX2 RX1 RX2 TOA 12:00 Page 56

57 HYPERBOLA VE 3D TDOA představuje hyperbolu v rovině a hyperboloid v prostoru. Page 57
58 PRINCIP MULTILATERACE HYPERBOLOID PRŮNIK Page 58
59 PŘESNOST MULTILATERACE PŘESNOST Standardní odchylka od pozice je definována následovně: σ x,y,z = σ T x c x PDOP σ T Je dána standardní odchylkou měřeného času na přijímačích c Je rychlost světla (konstanta) PDOP Positional Dilution Of Precision (pozice stanic vůči cíli) Page 59
60 PŘESNOST MULTILATERACE PŘESNOST Vztah mezi přesností v 3D prostoru a geometrií systému je popsána jako PDOP (Position Dilution of Precision) faktor. PDOP je dáno pouze geometrickým rozmístěním přijímacích stanic. Doba pro zpracování dat na to nemá vliv. Vzhledem k PDOP můžeme definovat: HDOP Horizontal Dilution of Precision Horizontální nepřesnost VDOP Vertical Dilution of Precision Vertikální nepřesnost Page 60
61 PŘESNOST MULTILATERACE OBLAST NEPŘESNOSTI Vzniká protnutím hyperbol ROZPTYL HYPERBOLY je dán diskrétou stanice a nepřesností měření náběžné hrany pulzu OBLAST NEPŘESNOSTI ROZPTYL HYPERBOLY Page 61
62 PŘESNOST MULTILATERACE OBLAST NEPŘESNOSTI PDOP je měřeno s využitím 4 stanic, které jsou rozmístěny dle zobrazení. ROZMÍSTĚNÍ STANIC Page 62
63 MULTIRANGING ELIPTICKÁ METODA MULTIRANGING Vysílací stanice TX Přijímací stanice RX Dotaz 1030 MHz Odpověď 1090 MHz Elipsa s ohnisky TX a RX TX RX Page 63
64 MULTIRANGING ELIPTICKÁ METODA MULTIRANGING Rozmístění stanic a změření času od vyslání do přijetí signálů vytvoří elipsu. Elipsa má vyšší nepřesnost než hyperbola, což je dáno nekonstatním zpožděním zpracování odpovědi. Elipsa zmenšuje oblast nepřesnosti u vzdálených cílů, kde je velmi ostrý úhel protnutí hyperbol. Tato metoda vyžaduje mód S transpondéry Page 64
65 PŘESNOST MULTILATERACE OBLAST ZPŘESNĚNÍ OBLAST NEPŘESNOSTI ROZPTYL ELIPSY ROZPTYL HYPERBOLY Page 65
66 ZPRACOVÁNÍ SIGNÁLŮ MSS
67 ARCHITEKTURA MSS Communication Network Central Processing Station

68 Page 68 DATA FLOW DT
69 DATA FLOW DT/CT DATA FLOW CENTRÁLNÍ ČAS PŘIJETÍ SIGNÁLU PŘENOS SIGNÁLU DO CPS RX DATA TRANS. MU SYNC DIGITALIZACE, ČASOVÁ ZNAČKA A SYNCHRO. PŘENOS DAT DO TP VÝPOČET POZIC CÍLŮ VÝSTUP DAT DO ASTERIX RXS ANTÉNA OPTICKÝ NEBO MIKROVLNNNÝ DATOVÝ SPOJ PŘIJÍMACÍ STANICE CPS MĚŘÍCÍ JEDNOTKA PC SBĚRNICE CPS PCI TP ASTERIX VÝSTUP DAT Page 69
70 DATA FLOW DT/CT DATA FLOW DISTRIBUOVANÝ ČAS PŘIJETÍ SIGNÁLU PŘENOS SIGNÁLU DO MU DIGITALIZACE A ČASOVÁ ZNAČKA PŘENOS DAT DO TP VÝPOČET POZIC CÍLŮ RX RXS RX DATA TRANS. MU PCI SYNC CPS ISA/PCI RXS PC SBĚRNICE PŘIJÍMACÍ JEDNOTKA MU (PC) DATOVÉ PŘIPOJENÍ TP CPS ASTERIX LAN/WAN TP ASTERIX VÝSTUP DAT DO ASTERIX ANTÉNA MĚŘÍCÍ JEDNOTKA Page 71
71 SYNCHRONIZACE DT Time mark UTC GPS Časové značky z GPS UTC čas a dodatečné GPS info Zprávy A/C/S s TOA Obsah zpráv módů A/C/S Oscil Time normal RXS SNTP GPS Time mark UTC Time mark GPS CPS RXS Time normal Oscil UTC Oscil Page 72 Time normal RXS Zabezpečuje korekce TOA Počítá TDOA

72 ASTERIX ASTERIX All Purpose Structured Eurocontrol Surveillance Information Exchange Jedná se o binární formát zpráv pro řízení letového provozu, který dovoluje přenos harmonizovaných informací mezi sledovacím systémem a dalšími systémy. ASTERIX definuje strukturu dat, které mají být přenášeny přes komunikační médium, od kódování všech informačních bitů až po organizaci dat v datových blocích beze ztrát jakýchkoliv informací během celého procesu. Page 73
73 ASTERIX ASTERIX VYBRANÉ KATEGORIE CAT001 Monoradar Target Reports CAT010 Monoradar Surface Movement Data CAT011 SMGCS Data CAT019 Multilateration System Status Messages CAT020 Multilateration Messages CAT021 ADS-B Messages CAT022 TIS-B Management Messages CAT023 CNS/ATM Ground Station Service Messages Page 74
74 VYSÍLÁNÍ SYSTÉMU MSS
75 VYSÍLÁNÍ SYSTÉMU MÓD S Dotazy Krátký pulz P4 v all-call dotazu minimalizuje negativní vliv na okolní SSR (tím, že S-módové transpondéry nereagují na tento A/C dotaz) Adresný S-módový dotaz zjistí: Identifikaci (mód A) Barometrickou výšku (mód C) Volací znak Letový stav (GND ground flag ) Mód S výšku (DF 4 a 20) Identifikace letadla (DF 5 a 21) Page 76
 Zjištění výšky (S-módový dotaz")
76 VYSÍLÁNÍ SYSTÉMU MÓD S Dotazy Adresné dotazování v módu S Identifikace cíle (S-módový dotaz UF5) Zjištění výšky (S-módový dotaz UF4) Page 77
77 VYSÍLÁNÍ SYSTÉMU MÓD S Zprávy Vysílání v módu S extended non-transponder squitters (DF=18) Využívají se pro: Kontrola integrity Synchronizace v multirangingu Každý S módový dotazovač musí mít unikátní S módovou adresu vydanou autoritou civilního létání Page 78
78 CIVILNÍ VYUŽITÍ MSS

79 MSS MUNICH - Complex airport design with terminal in the middle - High number of stations - Extremely high accuracy Page 80

80 WAM NAMIBIA New national ATM system Thales Eurocat fusion and display Thales radar in Windhoek Era multilateration for national en-route ED-142 performance required 36 ADS-B/MLAT stations Some very remote, hostile locations Builds on regional experience in ATNS Covers km² of airspace, FL >145 and TMA N-1 availability required 1250 Km 1250 Km Safety Case and operational approval by Austrocontrol, Austria Ongoing extension program for Walvis Bay and Caprivi strip The largest WAM Coverage area in the World!!! Page 81

81 MLAT VS.SSR AT FL145 SSR Windhoek Extremely high accuracy of 20 m RMS Page 82

82 Page 83 INSTALATION

83 MLAT QUEENSTOWN Requirements Provide TMA and approach surveillance for Queenstown airport starting from 500ft AGL Display system at Queenstown Control Centre. MW links used for data communication Fused into old Lockheed Martin Skyline Flight Data processor (ASTERIX Cat. 001 used) Extreme weather and terrain conditions for installation System composition 14 MLAT ground stations Page 84

84 Page 85 SAT RESULT VISUALIZATION
85 Page 86 INSTALATION
86 REDUNDANCE Redundance pokrytí systému n-1 redundance v souvislosti s počtem RXS Jakákoli jedna RXS může selhat bez ztráty kvality výstupních dat. Dotazovače / vysílače jsou vzájemně jištěny překrýváním oblastí dotazování / vysílacích pokrytí. Záloha zdrojů elektrické energie Všechny stanice jsou napojeny přes tzv. uninterruptible power supply (UPS) všude tam, kde jinak záložní zdroj neexistuje. Všechen kritický hardware (např. servery, RXS, RXTXS) jsou vybaveny UPS. Redundance funkcí CPS Target Procesory jsou zdvojeny. Každý TP může poskytovat data přes LAN jako nezávislý senzor (oba pracují na sobě nezávisle). Page 87
 Kontrola věže ŘLP/ brány (Sledování prostoru letiště ) Sledování rozsáhlých")

87 Area Control Center (En-Route sledování) Kontrola přiblížení (Terminal Manoeuvring Surveillance) Kontrola věže ŘLP/ brány (Sledování prostoru letiště ) Sledování rozsáhlých oblastí náhrada SSR výplň mezer ve sledování ŘLP aktivní nebo pasivní Kontrola přiblížení náhrada za PRM Prostor letiště A-SMGCS doplněk SMR Jen povrch Do 5 NM S / bez Vehicle Tracking System Page 88
88 SROVNÁNÍ (SSR VS. MLAT) Multilateration SSR Měření výšky Bez slepých kuželů Bez šikmých vzdáleností Žádné rotující části Žádné FRUIT ADS-B processing Nízká spotřeba Jedna stanice Page 89

89 MLAT VS. SSR MLAT AKVIZIČNÍ VÝHODY - NÍZKÁ AKVIZIČNÍ CENA - RYCHLEJŠÍ IMPLEMENTACE PROJEKTU MLAT VÝHODY ÚDRŽBY - NÍŽŠÍ NÁKLADY - ŽÁDNÉ ROTUJÍCÍ ČÁSTI - JEDNODUŠŠÍ DESIGN SYSTÉMU - ŹÁDNÉ BUDOVY NEBO VELKÉ VĚŽE - NEJSOU POTŘEBA GENERÁTORY Source: Interviews with ATC Service Providers & Public Tender Statistics Page 90 MLAT JE LEVNĚJŠÍ A TO I NA ÚDRŽBU
90 VOJENSKÉ VYUŽITÍ VERA-NG
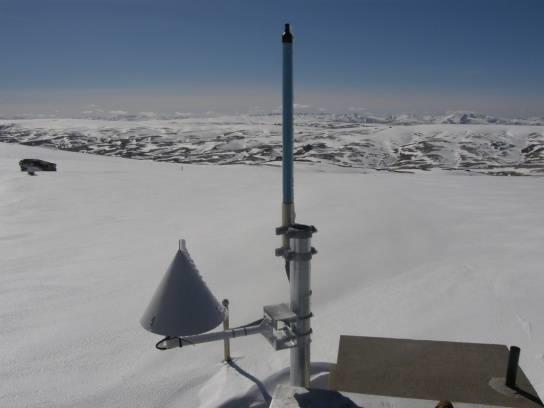
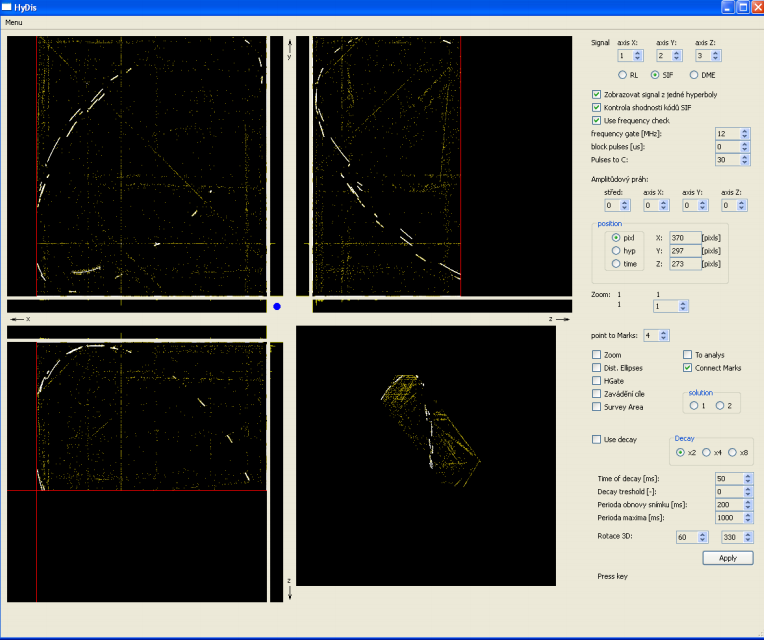
91 POPIS SYSTÉMU Vera-NG je čtyřpoziční časově-hyperbolický pasivní sledovací systém umožňující příjem a zpracování impulzních signálů RL, kódů odpovědí SSR módů 3/A, C, 1, 2 (dále kódy SIF), kódů odpovědí SSR módu S, signálů DME/ TACAN a signálů v pásmu UHF (od 88 MHz do 1000 MHz). Vera-NG poskytuje informaci o poloze (trajektorii) cílů, a parametrech palubních radiolokačních prostředků. V konfiguraci 3+1 poskytuje systém i změřenou (geometrickou) výšku cílů. Systém je určen pro nepřetržitý provoz 24 hodin denně. Page 92

92 SYSTÉM Systém Vera-NG se standardně skládá ze 4 přijímacích stanic (3 boční + 1 centrální) a vyhodnocovacího pracoviště. Může být instalován jako stacionární nebo mobilní. Mobilní instalace umožňuje rychlý přesun celého systému do jiného zájmového prostoru. Page 93 BOČNÍ PŘIJÍMACÍ STANICE
93 IDENTIFIKACE CÍLŮ Identifikace cíle (nosič a režim) probíhá podle uživatelsky naplňované databáze cílů. Systém je schopen zjišťovat a sledovat cíle s rychlostmi 0 až 4 Mach. Kapacita zpracování činí až 200 automaticky vedených cílů, z nichž max. 5% má koeficient plnění signálu (TI/TOP) až 30%. Page 94
94 VLASTNOSTI Pravděpodobnost detekce VERA-NG má vysokou pravděpodobnost detekce cílů danou fixními nerotujícími anténami se širokým úhlem pohledu 120 stupňů a přijímači se širokým frekvenčním oknem. Nevysílající letadla Pokud je cíl absolutně tichý (žádné palubní vysílání), je neviditelný pro pasivní systémy. Prakticky je ale tento způsob provozu těžko aplikovatelný v delším časovém horizontu. V takovém případě je totiž cíl slepý, nemá možnost identifikace pro spřátelené jednotky, radar není možné použít pro takové funkce jako např. kontrola střelby, detekce cílů, skenování povrchu země, kontrola bombardování apod. Page 95
95 VLASTNOSTI Odolnost proti rušení Není známa možná zarušitelnost systému VERA-NG. Každý zdroj rušení určuje bod v hyperbolickém prostoru a může být lokalizován a trekován. Rušení vlastních palubních zařízení nedává smysl pro nepřítele; lepším způsobem je vypnutí všech vysílačů. Rozpoznání vysílačů Díky schopnosti systému spojit pozici cíle s jeho elektromagnetickým vzorem může uživatel systému VERA-NG sledovat módy operací a individuální chování jednotlivých cílů. Dlouhodobé sledování jednotlivých vysílačů na širokém území umožňuje pohotové a přesné včasné varování o identifikovaném nepříteli v případě potenciálního útoku. Uživatel může získat informaci o strategických pohybech letadel ze základny na základnu, pohybech válečných lodí apod. Page 96
96 SLEDOVANÉ PARAMETRY Poloha 3D, poloha 2D s výškou z Mód C nebo Mód S Kódy SIF 1, 2, 3/A, 3/C z palubních odpovídačů Mód S Příznak módu 4 Kmitočet/kanál DME/TACAN Kmitočet nosné (CF), opakovací perioda (PRI), délka impulsu (PW) a zákonitosti jejich časových změn (pro signály v pásmu 0,08 18 GHz ) Amplituda impulsu (PA) s diskrétou (5 bitů) Vnitroimpulsní manipulace kmitočtu nosné, obálka ozáření Page 97


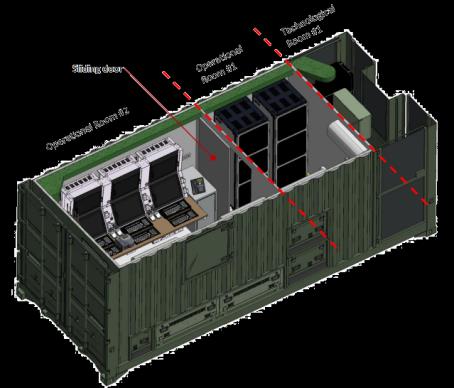
97 KONCEPT ROZMÍSTĚNÍ VERA-NG CPS kontejner Page 98

98 Page 99 VERA-NG

99 OPERÁTORSKÉ PRACOVIŠTĚ PŘÍKLAD VYHODNOCOVACÍHO PRACOVIŠTĚ KONTEJNER S VYHODNOCOVACÍM PRACOVIŠTĚM A DOPRAVNÍ PROSTŘEDEK NAPŘÍKLAD TATRA Page 100
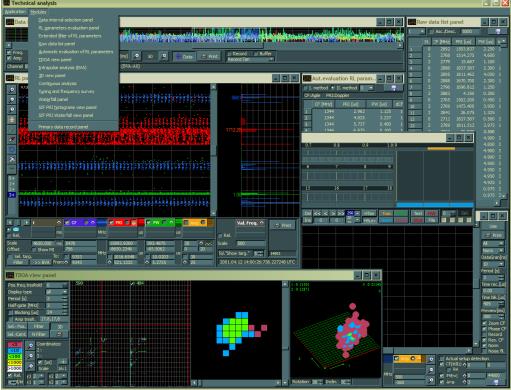
100 Page 101 OPERÁTORSKÉ PRACOVIŠTĚ
101 SEKTOR KRYTÍ V každé konkrétní konfiguraci rozmístění stanic systému je prostor krytí dán průnikem rádiových viditelností (rádiových horizontů) všech čtyř stanic a prostoru možné detekce cílů. Anténní systém je otočný v rozsahu sektor sledování je možno pokynem z centrální stanice změnit během cca 5 sekund. covered area 400 km 350 km 120 detection area 1 Page

102 Page 103 PŘÍKLADY PROVEDENÍ

103 ENVIRONMENT ACTIVE RADAR LOCALIZABILITY EFFECTIVE COUNTERMEASURES STEALTH TECHNOLOGY JAMMING ANTIRADAR MISSILES Page 104 INDEPENDENT (doesn t need any transmission from target)

104 ENVIRONMENT MULTIFUNCTIONAL RADAR REAR HEMISPHERE RADAR MULTILATERATION PROVIDES RESISTANT AND COVERT SURVEILLANCE SSR/IFF, TACAN/DME, DATALINK, JAMMERS VERA-NG Page 105 ELECTRONICALLY AND PHYSICALLY COVERT TARGET IDENTIFICATION THROUGH SIGNAL ANALYSIS

105 SILENT GUARD První funkční prototyp PCL Uveden na IDETu 2013 Skrytá detekce neemitujících cílů s využitím stávající vysílací infrastruktury Page 106
106 UKONČENÍ DĚKUJI ZA POZORNOST! Page 107
POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ
 RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
RUP 01b POROVNÁNÍ JEDNOTLIVÝCH SYSTÉMŮ Časoměrné systémy: Výhody: Vysoká přesnost polohy (metry) (díky vysoké přesnosti měření časového zpoždění signálů), nenáročné antény, nízké výkony vysílačů Nevýhoda:
ERA a.s. Pardubice. Prezentující: Ing. Vojtěch STEJSKAL, Ph.D.
 ERA a.s. Pardubice Prezentující: Ing. Vojtěch STEJSKAL, Ph.D. Profil firmy ERA a.s. ERA a.s. Akciová společnost, založena v roce 1994 se sídlem v Pardubicích. Zabýváme se vývojem, výrobou a prodejem pasivních
ERA a.s. Pardubice Prezentující: Ing. Vojtěch STEJSKAL, Ph.D. Profil firmy ERA a.s. ERA a.s. Akciová společnost, založena v roce 1994 se sídlem v Pardubicích. Zabýváme se vývojem, výrobou a prodejem pasivních
NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS
 NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS Marcela Ujcová 1 Anotace: Článek popisuje prostorovou navigaci a využití multilateračních systémů
NAVIGACE V LETECKÉ DOPRAVĚ S VYUŽITÍM MLAT SYSTÉMŮ AIR TRAFFIC NAVIGATION USING MULTILATERATION SYSTEMS Marcela Ujcová 1 Anotace: Článek popisuje prostorovou navigaci a využití multilateračních systémů
Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč
 Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč Ing. Jiří Valenta Ministerstvo dopravy Odbor civilního letectví RADIOKOMUNIKACE 2014 1 Letecké radiokomunikační služby Letecká
Novinky v letecké navigaci a komunikaci, přechod na novou kanálovou rozteč Ing. Jiří Valenta Ministerstvo dopravy Odbor civilního letectví RADIOKOMUNIKACE 2014 1 Letecké radiokomunikační služby Letecká
Ing. Jiří Fejfar, Ph.D. GNSS. Globální navigační satelitní systémy
 Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
Ing. Jiří Fejfar, Ph.D. GNSS Globální navigační satelitní systémy Kapitola 1: Globální navigační systémy (Geostacionární) satelity strana 2 Kapitola 1: Globální navigační systémy Složky GNSS Kosmická složka
3.3 Seznamte se s principem systému ADS-B a ovládáním přijímače odpovědí ADS-B Kinetic Avionic SBS-1.
 MRAR-L ZADÁNÍ Č. úlohy 3 Navigační systémy pro civilní letectví 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno - Tuřany. 3.3 Seznamte se s
MRAR-L ZADÁNÍ Č. úlohy 3 Navigační systémy pro civilní letectví 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno - Tuřany. 3.3 Seznamte se s
VDL 4. Katedra radioelektroniky ČVUT FEL
 VDL 4 Dr. Ing. Pavel Kovář Katedra radioelektroniky ČVUT FEL VDL 4 Vlastnosti Přenos dat (připojení na ATN) Navržena pro podporu navigace letadel a pro zajištění přehledu o vzdušné situaci podporuje přenos
VDL 4 Dr. Ing. Pavel Kovář Katedra radioelektroniky ČVUT FEL VDL 4 Vlastnosti Přenos dat (připojení na ATN) Navržena pro podporu navigace letadel a pro zajištění přehledu o vzdušné situaci podporuje přenos
Sponzorem úlohy je společnost
 MRAR-L Č. úlohy 3 Navigační systémy pro civilní letectví Sponzorem úlohy je společnost ZADÁNÍ 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno
MRAR-L Č. úlohy 3 Navigační systémy pro civilní letectví Sponzorem úlohy je společnost ZADÁNÍ 3.1 Seznamte se s navigačními službami řízení letového provozu. 3.2 Sledujte provoz hlasových služeb ŘLP Brno
Principy GPS mapování
 Principy GPS mapování Irena Smolová GPS GPS = globální družicový navigační systém určení polohy kdekoliv na zemském povrchu, bez ohledu na počasí a na dobu, kdy se provádí měření Vývoj systému GPS původně
Principy GPS mapování Irena Smolová GPS GPS = globální družicový navigační systém určení polohy kdekoliv na zemském povrchu, bez ohledu na počasí a na dobu, kdy se provádí měření Vývoj systému GPS původně
Zdroje dat GIS. Digitální formy tištěných map. Vstup dat do GISu:
 Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Zdroje dat GIS Primární Sekundární Geodetická měření GPS DPZ (RS), fotogrametrie Digitální formy tištěných map Kartografické podklady (vlastní nákresy a měření) Vstup dat do GISu: Data přímo ve potřebném
Global Positioning System
 Písemná příprava na zaměstnání Navigace Global Positioning System Popis systému Charakteristika systému GPS GPS (Global Positioning System) je PNT (Positioning Navigation and Timing) systém vyvinutý primárně
Písemná příprava na zaměstnání Navigace Global Positioning System Popis systému Charakteristika systému GPS GPS (Global Positioning System) je PNT (Positioning Navigation and Timing) systém vyvinutý primárně
Nové letištní radary pro Armádu ČR. ELDIS Pardubice, s.r.o.
 Nové letištní radary pro Armádu ČR ELDIS Pardubice, s.r.o. ELDIS Pardubice, s.r.o. ELDIS = ELEKTRONICKÉ DIGITÁLNÍ SYSTÉMY Přední český výrobce aktivních radarových systémů. Společnost byla založena v roce
Nové letištní radary pro Armádu ČR ELDIS Pardubice, s.r.o. ELDIS Pardubice, s.r.o. ELDIS = ELEKTRONICKÉ DIGITÁLNÍ SYSTÉMY Přední český výrobce aktivních radarových systémů. Společnost byla založena v roce
14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 14. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 5.5.2016 Jiří Šebesta Ústav radioelektroniky
Nové trendy v zabezpečení rozsáhlých areálů
 Nové trendy v zabezpečení rozsáhlých areálů Tomáš Semerád Siemens, s. r. o. divize Building Technologies Page 1 Nové trendy v zabezpečení rozsáhlých areálů Obsah Termovize RADAR Page 2 Nové trendy v zabezpečení
Nové trendy v zabezpečení rozsáhlých areálů Tomáš Semerád Siemens, s. r. o. divize Building Technologies Page 1 Nové trendy v zabezpečení rozsáhlých areálů Obsah Termovize RADAR Page 2 Nové trendy v zabezpečení
ACARS Aircraft communiactions Addressing & Reporting System
 ACARS ACARS Aircraft communiactions Addressing & Reporting System Komunikační letadlový systém Tři hlavní datové linky: digitální komunikace určená pro řízení letového provozu ATC/ATS digitální přenos
ACARS ACARS Aircraft communiactions Addressing & Reporting System Komunikační letadlový systém Tři hlavní datové linky: digitální komunikace určená pro řízení letového provozu ATC/ATS digitální přenos
Geoinformační technologie
 Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
Geoinformační technologie Globáln lní navigační a polohové družicov icové systémy Výukový materiál pro gymnázia a ostatní střední školy Gymnázium, Praha 6, Nad Alejí 1952 Vytvořeno v rámci projektu SIPVZ
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jakub Nosek MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ Bakalářská práce 2016 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jakub Nosek MODELOVÁNÍ MNOŽSTVÍ PŘENOSŮ GENEROVANÝCH SYSTÉMEM ACAS V REÁLNÉM PROSTŘEDÍ Bakalářská práce 2016 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta
Evropský navigační systém. Jan Golasowski GOL091
 Evropský navigační systém Jan Golasowski GOL091 Co je GALILEO Proč GALILEO Poskytované služby Satelity Použitá technologie GALILEO 2 Autonomní evropský Globální družicový polohový systém. Obdoba amerického
Evropský navigační systém Jan Golasowski GOL091 Co je GALILEO Proč GALILEO Poskytované služby Satelity Použitá technologie GALILEO 2 Autonomní evropský Globální družicový polohový systém. Obdoba amerického
ATN Datalink datové spojení mezi zemí a letadly. XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice Milan Soukup, ŘLP ČR
 ATN Datalink datové spojení mezi zemí a letadly 1 XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice 18.10.2017 Milan Soukup, ŘLP ČR Uživatelé datové komunikace mezi letadlem a pozemními systémy 2 Provozovatelé
ATN Datalink datové spojení mezi zemí a letadly 1 XXVII. KONFERENCE RADIOKOMUNIKACE 2017 Pardubice 18.10.2017 Milan Soukup, ŘLP ČR Uživatelé datové komunikace mezi letadlem a pozemními systémy 2 Provozovatelé
GPS. Uživatelský segment. Global Positioning System
 GPS Uživatelský segment Global Positioning System Trocha 3D geometrie nikoho nezabije opakování Souřadnice pravoúhlé a sférické- opakování Souřadnice sférické- opakování Pro výpočet délky vektoru v rovině
GPS Uživatelský segment Global Positioning System Trocha 3D geometrie nikoho nezabije opakování Souřadnice pravoúhlé a sférické- opakování Souřadnice sférické- opakování Pro výpočet délky vektoru v rovině
Zvýšení bezpečnosti provozu na letištích. Honeywell Aerospace Advanced Technology June 2014
 Zvýšení bezpečnosti provozu na letištích Honeywell Aerospace Advanced Technology June 2014 Obsah prezentace 1. Bezpečnostní rizika provozu na letištích 2. Potenciální řešení 3. Současná řešení 4. Budoucí
Zvýšení bezpečnosti provozu na letištích Honeywell Aerospace Advanced Technology June 2014 Obsah prezentace 1. Bezpečnostní rizika provozu na letištích 2. Potenciální řešení 3. Současná řešení 4. Budoucí
ÚVODNÍ ČÁST PŘEDPIS L 8168
 ÚVODNÍ ČÁST PŘEDPIS L 8168 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH i ii iii ČÁST I LETOVÉ POSTUPY VŠEOBECNĚ I-1-1-1 Díl 1 Definice, zkratky a akronymy I-1-1-1
ÚVODNÍ ČÁST PŘEDPIS L 8168 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH i ii iii ČÁST I LETOVÉ POSTUPY VŠEOBECNĚ I-1-1-1 Díl 1 Definice, zkratky a akronymy I-1-1-1
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ LETECKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AEROSPACE ENGINEERING VYUŽITÍ SSR MÓDU S PRO ŘÍZENÍ
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ LETECKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AEROSPACE ENGINEERING VYUŽITÍ SSR MÓDU S PRO ŘÍZENÍ
KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum
 Strana Datum Strana Datum") KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum i / ii 23.11.2006 Změna č. 81 iii / iv 8.11.2018 v 10.11.2016
KONTROLNÍ SEZNAM STRAN PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK I RADIONAVIGAČNÍ PROSTŘEDKY (L 10/I) Strana Datum Strana Datum i / ii 23.11.2006 Změna č. 81 iii / iv 8.11.2018 v 10.11.2016
GPS přijímač. Jan Chroust
 GPS přijímač Jan Chroust Modul byl postaven na základě IO LEA-6S společnosti u-box, plošný spoj umožňuje osazení i LEA-6T. Tyto verze umožňují příjem GPS signálu a s tím spojené výpočty. Výhodou modulu
GPS přijímač Jan Chroust Modul byl postaven na základě IO LEA-6S společnosti u-box, plošný spoj umožňuje osazení i LEA-6T. Tyto verze umožňují příjem GPS signálu a s tím spojené výpočty. Výhodou modulu
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
md at robotika.cz http://robotika.cz/guide/umor07/cs 14. listopadu 2007 1 Diferenciální 2 Motivace Linearizace Metoda Matematický model Global Positioning System - Diferenciální 24 navigačních satelitů
EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy
 Prezentace do předmětu Geografické informační systémy") EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy EGNOS - je aplikace systému SBAS (Satellite Based Augmentation System) - je vyvíjen: Evropskou
EGNOS (European Geostationary Navigation Overlay Service) Prezentace do předmětu Geografické informační systémy EGNOS - je aplikace systému SBAS (Satellite Based Augmentation System) - je vyvíjen: Evropskou
Detekce, lokalizace a rušení nežádoucích dronů
 Detekce, lokalizace a rušení nežádoucích dronů R&S ARDRONIS Kontakt: ROHDE&SCHWARZ Praha, s.r.o. Ing. Jan Wagner Office Park Hadovka Evropská 2590/33c 160 00 Praha 6 jan.wagner@rohde-schwarz.com 01.06.2018
Detekce, lokalizace a rušení nežádoucích dronů R&S ARDRONIS Kontakt: ROHDE&SCHWARZ Praha, s.r.o. Ing. Jan Wagner Office Park Hadovka Evropská 2590/33c 160 00 Praha 6 jan.wagner@rohde-schwarz.com 01.06.2018
Problematika rušení meteorologických radarů ČHMÚ
 Problematika rušení meteorologických radarů ČHMÚ Ondřej Fibich, Petr Novák (zdrojová prezentace) Český Hydrometeorologický ústav, oddělení radarových měření Meteorologické radary využití - detekce srážkové
Problematika rušení meteorologických radarů ČHMÚ Ondřej Fibich, Petr Novák (zdrojová prezentace) Český Hydrometeorologický ústav, oddělení radarových měření Meteorologické radary využití - detekce srážkové
Základy rádiové navigace
 Základy rádiové navigace Obsah Definice pojmů Způsoby navigace Principy rádiové navigace Pozemské navigační systémy Družicové navigační systémy Definice pojmů Navigace Vedení prostředku po stanovené trati
Základy rádiové navigace Obsah Definice pojmů Způsoby navigace Principy rádiové navigace Pozemské navigační systémy Družicové navigační systémy Definice pojmů Navigace Vedení prostředku po stanovené trati
13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 28.4.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 13. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 28.4.2016 Jiří Šebesta Ústav radioelektroniky
OPTIMALIZACE ILS NA LKVO VODOCHODY OPTIMIZATION ILS IN LKVO VODOCHODY
 OPTIMALIZACE ILS NA LKVO VODOCHODY OPTIMIZATION ILS IN LKVO VODOCHODY Markéta Čapková 1 Anotace: Příspěvek se zabývá problematikou přesného přibližovacího zařízení na letišti LKVO Vodochody. Součástí příspěvku
OPTIMALIZACE ILS NA LKVO VODOCHODY OPTIMIZATION ILS IN LKVO VODOCHODY Markéta Čapková 1 Anotace: Příspěvek se zabývá problematikou přesného přibližovacího zařízení na letišti LKVO Vodochody. Součástí příspěvku
Souřadnicové soustavy a GPS
 Technologie GPS NAVSTAR Souřadnicové soustavy a GPS Prostorové geocentrické v těch pracuje GPS Rovinné kartografické tyto jsou používány k lokalizaci objektů v mapách Důsledek: chceme-li využívat GPS,
Technologie GPS NAVSTAR Souřadnicové soustavy a GPS Prostorové geocentrické v těch pracuje GPS Rovinné kartografické tyto jsou používány k lokalizaci objektů v mapách Důsledek: chceme-li využívat GPS,
MSSR-Monopulse Secondary Surveillance Radar
 MSSR-Monopulse Secondary Surveillance Radar Vadim Závodný Eldis Pardubice, sro. Pardubice, Czech Republic zavodny@eldis.cz Thank s to Ing. Dominik Kupčák for technical support 1 Přehled Rozdělení systémů
MSSR-Monopulse Secondary Surveillance Radar Vadim Závodný Eldis Pardubice, sro. Pardubice, Czech Republic zavodny@eldis.cz Thank s to Ing. Dominik Kupčák for technical support 1 Přehled Rozdělení systémů
KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum Změna č. 2/ČR a Oprava č.
 Strana Datum Strana Datum Změna č. 2/ČR a Oprava č.") KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum i až v vi až vii viii až ix 1-1 / 1-2 1-3 až 1-5 1-6 až 1-8 1-9 až 1-10 1-11 1-12 1-13 / 1-14 a Oprava
KONTROLNÍ SEZNAM STRAN PŘEDPIS POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY (L 4444) Strana Datum Strana Datum i až v vi až vii viii až ix 1-1 / 1-2 1-3 až 1-5 1-6 až 1-8 1-9 až 1-10 1-11 1-12 1-13 / 1-14 a Oprava
Druhy sdělovacích kabelů: kroucené metalické páry, koaxiální, světlovodné
 7. Přenos informací Druhy sdělovacích kabelů: kroucené metalické páry, koaxiální, světlovodné A-PDF Split DEMO : Purchase from www.a-pdf.com to remove the watermark MODULACE proces, při kterém se, v závislosti
7. Přenos informací Druhy sdělovacích kabelů: kroucené metalické páry, koaxiální, světlovodné A-PDF Split DEMO : Purchase from www.a-pdf.com to remove the watermark MODULACE proces, při kterém se, v závislosti
2. Pilotážní přístroje a Navigační systémy. Pavel Kovář
 2. Pilotážní přístroje a Navigační systémy Pavel Kovář kovar@fel.cvut.cz Obsah Základní pojmy Letecké mapy Pilotážní přístroje Světelné majáky Principy rádiové navigace Rádiové navigační systémy Řízení
2. Pilotážní přístroje a Navigační systémy Pavel Kovář kovar@fel.cvut.cz Obsah Základní pojmy Letecké mapy Pilotážní přístroje Světelné majáky Principy rádiové navigace Rádiové navigační systémy Řízení
5. Vzdušný prostor. Pavel Kovář Řízení letového provozu 1. Úvod do ŘLP 1
 5. Vzdušný prostor Pavel Kovář kovar@fel.cvut.cz Řízení letového provozu 1. Úvod do ŘLP 1 Rozdělení vzdušného prostoru Členění Letové oblasti - řídí ACC Koncové řízené oblasti řídí APP Řízené okrsky, okrsky
5. Vzdušný prostor Pavel Kovář kovar@fel.cvut.cz Řízení letového provozu 1. Úvod do ŘLP 1 Rozdělení vzdušného prostoru Členění Letové oblasti - řídí ACC Koncové řízené oblasti řídí APP Řízené okrsky, okrsky
1. Historie ŘLP. Pavel Kovář
 1. Historie ŘLP Pavel Kovář kovar@fel.cvut.cz Historie ŘLP 1903 první let bratři Wrightové doba experimentů, letadla neprocházela žádným testováním, piloti bez licence 1914 1918 první světová válka rozvoj
1. Historie ŘLP Pavel Kovář kovar@fel.cvut.cz Historie ŘLP 1903 první let bratři Wrightové doba experimentů, letadla neprocházela žádným testováním, piloti bez licence 1914 1918 první světová válka rozvoj
Dvoupásmový přístupový bod pro venkovní použití Návod k obsluze - EC-WA6202 (EC-WA6202M)
") Dvoupásmový venkovní přístupový bod / systém mostů poskytuje služby přístupového bodu nebo mostů prostřednictvím radiových rozhraní s frekvencí 5 GHz nebo 2,4 GHz. Bezdrátové přemosťovací jednotky lze
Dvoupásmový venkovní přístupový bod / systém mostů poskytuje služby přístupového bodu nebo mostů prostřednictvím radiových rozhraní s frekvencí 5 GHz nebo 2,4 GHz. Bezdrátové přemosťovací jednotky lze
Ve FIRu se nacházejí další řízené a neřízené prostory (CTR, TMA, CTA, ATZ, TSA, TRA, D, P, R).
.") Â Vzdušný prostor se označuje jako letová informační oblast (Flight information region FIR). V České republice máme jen jeden FIR a to FIR Praha, který sahá vertikálně od GND do FL660 a horizontálně kopíruje
 Vzdušný prostor se označuje jako letová informační oblast (Flight information region FIR). V České republice máme jen jeden FIR a to FIR Praha, který sahá vertikálně od GND do FL660 a horizontálně kopíruje
Radio v civilním letectví (airliners + GA) Brmlab 5.3.2015
 Brmlab 5.3.2015") Radio v civilním letectví (airliners + GA) Brmlab 5.3.2015 Historie první vysílání air/ground - 1910 (Horton, Culver, USA) první zaznamenané telegrafní vysílání - 1911, Lt. Paul W. Beck, USA (James McCurdy,
Radio v civilním letectví (airliners + GA) Brmlab 5.3.2015 Historie první vysílání air/ground - 1910 (Horton, Culver, USA) první zaznamenané telegrafní vysílání - 1911, Lt. Paul W. Beck, USA (James McCurdy,
Letecká doprava nezbytná součást dopravní infrastruktury ČR
 Význam letecké dopravy pro ekonomiku ČR Letecká doprava nezbytná součást dopravní infrastruktury ČR Petr Moos, Fakulta dopravní,čvut Vysokorychlostním vlakem nebo letadlem Kritické parametry rozhodování
Význam letecké dopravy pro ekonomiku ČR Letecká doprava nezbytná součást dopravní infrastruktury ČR Petr Moos, Fakulta dopravní,čvut Vysokorychlostním vlakem nebo letadlem Kritické parametry rozhodování
Co je nového v technice radiolokátorů
 Co je nového v technice radiolokátorů Radiokomunikace 2015 Libor DRAŽAN Katedra radiolokace Fakulta vojenských technologií Univerzita obrany libor.drazan@unob.cz 1 Obsah přednášky 1. Technologie STEALTH
Co je nového v technice radiolokátorů Radiokomunikace 2015 Libor DRAŽAN Katedra radiolokace Fakulta vojenských technologií Univerzita obrany libor.drazan@unob.cz 1 Obsah přednášky 1. Technologie STEALTH
6. ATS Letecké provozní služby. Pavel Kovář
 6. ATS Letecké provozní služby Pavel Kovář kovar@fel.cvut.cz Funkce ATS (leteckých provozních služeb) ATS-1: Zabránit srážkám letadel ve vzduchu ATS-2: Zabránit srážkám letadel na zemi ATS-3: Zabránit
6. ATS Letecké provozní služby Pavel Kovář kovar@fel.cvut.cz Funkce ATS (leteckých provozních služeb) ATS-1: Zabránit srážkám letadel ve vzduchu ATS-2: Zabránit srážkám letadel na zemi ATS-3: Zabránit
PB169 Operační systémy a sítě
 PB169 Operační systémy a sítě Přenos dat v počítačových sítích Marek Kumpošt, Zdeněk Říha Způsob propojení sítí opak. Drátové sítě TP (twisted pair) kroucená dvoulinka 100Mbit, 1Gbit Koaxiální kabel vyšší
PB169 Operační systémy a sítě Přenos dat v počítačových sítích Marek Kumpošt, Zdeněk Říha Způsob propojení sítí opak. Drátové sítě TP (twisted pair) kroucená dvoulinka 100Mbit, 1Gbit Koaxiální kabel vyšší
HLAVA 2 OBECNÁ USTANOVENÍ
 HLAVA 2 HLAVA 2 OBECNÁ USTANOVENÍ 2.1 Sekundární přehledový radar (SSR) 2.1.1 Je-li SSR instalován a provozován jako prostředek pro letecké provozní služby, musí vyhovovat ustanovením kap. 3.1, pokud není
HLAVA 2 HLAVA 2 OBECNÁ USTANOVENÍ 2.1 Sekundární přehledový radar (SSR) 2.1.1 Je-li SSR instalován a provozován jako prostředek pro letecké provozní služby, musí vyhovovat ustanovením kap. 3.1, pokud není
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence
 2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.10 GNSS GNSS Globální navigační satelitní systémy slouží k určení polohy libovolného počtu uživatelů i objektů v reálném čase
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.10 GNSS GNSS Globální navigační satelitní systémy slouží k určení polohy libovolného počtu uživatelů i objektů v reálném čase
21. DIGITÁLNÍ SÍŤ GSM
 21. DIGITÁLNÍ SÍŤ GSM Digitální síť GSM (globální systém pro mobilní komunikaci) je to celulární digitální radiotelefonní systém a byl uveden do provozu v roce 1991. V České republice byl systém spuštěn
21. DIGITÁLNÍ SÍŤ GSM Digitální síť GSM (globální systém pro mobilní komunikaci) je to celulární digitální radiotelefonní systém a byl uveden do provozu v roce 1991. V České republice byl systém spuštěn
1. Rozdělení kmitočtového pásma
 Příloha č. 22/11.2004 pro kmitočtové pásmo 87,5 146 MHz k plánu využití kmitočtového spektra Plánem využití kmitočtového spektra, zveřejněným v částce 12/2001 Telekomunikačního věstníku ze dne 17. prosince
Příloha č. 22/11.2004 pro kmitočtové pásmo 87,5 146 MHz k plánu využití kmitočtového spektra Plánem využití kmitočtového spektra, zveřejněným v částce 12/2001 Telekomunikačního věstníku ze dne 17. prosince
Beyond Radar. ERA v kostce.
 Beyond Radar ERA v kostce www.era.aero vítejte v ERA! Slovo generálního ředitele Vítejte ve světě ERA! Ve světě alternativních sledovacích technologií pro řízení letového provozu a obranné účely. Ve světě,
Beyond Radar ERA v kostce www.era.aero vítejte v ERA! Slovo generálního ředitele Vítejte ve světě ERA! Ve světě alternativních sledovacích technologií pro řízení letového provozu a obranné účely. Ve světě,
Galileo evropský navigační družicový systém
 Galileo evropský navigační družicový systém Internet ve státní správě a samosprávě Hradec Králové, 12. 13. duben 2010 1 Navigační systém Galileo je plánovaný autonomní evropský Globální družicový polohový
Galileo evropský navigační družicový systém Internet ve státní správě a samosprávě Hradec Králové, 12. 13. duben 2010 1 Navigační systém Galileo je plánovaný autonomní evropský Globální družicový polohový
PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV MINISTERSTVO DOPRAVY ČR
 MINISTERSTVO DOPRAVY ČR PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV Opatření Ministerstva dopravy č.j. 1285/2003-220-SP/1 ze dne 5.12.2003.
MINISTERSTVO DOPRAVY ČR PŘEDPIS O CIVILNÍ LETECKÉ TELEKOMUNIKAČNÍ SLUŽBĚ SVAZEK IV - PŘEHLEDOVÝ RADAR A PROTISRÁŽKOVÝ SYSTÉM L 10/IV Opatření Ministerstva dopravy č.j. 1285/2003-220-SP/1 ze dne 5.12.2003.
Satelitní navigace v informačních systémech dopravce. Plzeň Seminář ZČU Plzeň 1
 Satelitní navigace v informačních systémech dopravce Plzeň 26. 5. 2011 Seminář ZČU Plzeň 1 Obsah Úvod Informace o poloze důležitá hodnota Současné aplikace využívající GPS Budoucí možné aplikace Satelitní
Satelitní navigace v informačních systémech dopravce Plzeň 26. 5. 2011 Seminář ZČU Plzeň 1 Obsah Úvod Informace o poloze důležitá hodnota Současné aplikace využívající GPS Budoucí možné aplikace Satelitní
Globální družicový navigační systém
 Globální družicový navigační systém GALILEO Galileo je globální družicový navigační systém, který vyvíjí Evropa. Postaven je na principu amerického GPS a ruského GLONASS, což jsou vojenské navigační systémy.
Globální družicový navigační systém GALILEO Galileo je globální družicový navigační systém, který vyvíjí Evropa. Postaven je na principu amerického GPS a ruského GLONASS, což jsou vojenské navigační systémy.
SYSTÉM GALILEO. Jakub Štolfa, sto231 sto231@vsb.cz
 SYSTÉM GALILEO Jakub Štolfa, sto231 sto231@vsb.cz OBSAH 1) Co je to systém Galileo 2) Struktura systému Galileo 3) Služby systému Galileo 4) Přenosový systém systému Galileo 5) Historie systému Galileo
SYSTÉM GALILEO Jakub Štolfa, sto231 sto231@vsb.cz OBSAH 1) Co je to systém Galileo 2) Struktura systému Galileo 3) Služby systému Galileo 4) Přenosový systém systému Galileo 5) Historie systému Galileo
OVLÁDACÍ A MONITOROVACÍ SYSTÉM ID 6.2 typ 94 210
 OVLÁDACÍ A MONITOROVACÍ SYSTÉM ID 6.2 typ 94 210 Vizualizace systému ID 6.2 Typ 94 210 Použití Komplexní ovládací a monitorovací systém ID-6.2 je určen pro ovládání a monitorování: světelných signalizačních
OVLÁDACÍ A MONITOROVACÍ SYSTÉM ID 6.2 typ 94 210 Vizualizace systému ID 6.2 Typ 94 210 Použití Komplexní ovládací a monitorovací systém ID-6.2 je určen pro ovládání a monitorování: světelných signalizačních
GPS - Global Positioning System
 Vysoká škola báňská - Technická univerzita Ostrava 20. února 2011 GPS Družicový pasivní dálkoměrný systém. Tvoří sít družic, kroužících na přesně specifikovaných oběžných drahách. Pasivní znamená pouze
Vysoká škola báňská - Technická univerzita Ostrava 20. února 2011 GPS Družicový pasivní dálkoměrný systém. Tvoří sít družic, kroužících na přesně specifikovaných oběžných drahách. Pasivní znamená pouze
OPTIMALIZACE PROSTŘEDKŮ ZLT NA LETIŠTI OSTRAVA (NÁHRADA POJEZDOVÉHO RADARU)
") VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ LETECKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AEROSPACE ENGINEERING OPTIMALIZACE PROSTŘEDKŮ ZLT
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ LETECKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AEROSPACE ENGINEERING OPTIMALIZACE PROSTŘEDKŮ ZLT
N Á V R H. OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů
 N Á V R H OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad vydává podle 108 odst. 1 písm. b) zákona
N Á V R H OPATŘENÍ OBECNÉ POVAHY ze dne 2005, o rozsahu požadovaných údajů v žádosti o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad vydává podle 108 odst. 1 písm. b) zákona
Žádost o udělení individuálního oprávnění k využívání rádiových kmitočtů
 Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČESKÝ TELEKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČESKÝ TELEKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Co nového ve všeobecném letectví? Seminář FI(A), Praha, březen 2008 Marek Vinař, VPL ČSA, a.s.
, Praha, březen 2008 Marek Vinař, VPL ČSA, a.s.") Co nového ve všeobecném letectví? Seminář FI(A), Praha, březen 2008 Marek Vinař, VPL ČSA, a.s. Letecká informační služba přístup k informacím Od 1. ledna 2008 je přístup k níže uvedeným dokumentům vydávaným
Co nového ve všeobecném letectví? Seminář FI(A), Praha, březen 2008 Marek Vinař, VPL ČSA, a.s. Letecká informační služba přístup k informacím Od 1. ledna 2008 je přístup k níže uvedeným dokumentům vydávaným
Letadlové radiolokátory MO. SRD Bezdrátové místní sítě Letadlové radiolokátory MO ISM MEZIDRUŽICOVÁ POHYBLIVÁ RADIOLOKAČNÍ
 59,3 61 Letadlové radiolokátory Bezdrátové místní sítě Letadlové radiolokátory 61 62 SRD Bezdrátové místní sítě Letadlové radiolokátory ISM SRD Bezdrátové místní sítě Letadlové radiolokátory ISM 62 64
59,3 61 Letadlové radiolokátory Bezdrátové místní sítě Letadlové radiolokátory 61 62 SRD Bezdrátové místní sítě Letadlové radiolokátory ISM SRD Bezdrátové místní sítě Letadlové radiolokátory ISM 62 64
Moderní rádiové prvky v sítích pro Mobilní komunikaci
 Moderní rádiové prvky v sítích pro Mobilní komunikaci Karel Mikuláštík Úvod Mobilní sítě možnost telefonovat a přistupovat k internetu, téměř odkudkoliv Rozvoj 3G a 4G sítí 10 let => zvýšení uživatelských
Moderní rádiové prvky v sítích pro Mobilní komunikaci Karel Mikuláštík Úvod Mobilní sítě možnost telefonovat a přistupovat k internetu, téměř odkudkoliv Rozvoj 3G a 4G sítí 10 let => zvýšení uživatelských
AKTIVNÍ RFID SYSTÉMY. Ing. Václav Kolčava vedoucí vývoje HW COMINFO a.s.
 Ing. Václav Kolčava vedoucí vývoje HW COMINFO a.s. Základní vlastnosti: Na rozdíl od pasivních RFID systémů obsahují zdroj energie (primární baterie, akumulátor) Identifikátor tvoří mikroprocesor a vysílač
Ing. Václav Kolčava vedoucí vývoje HW COMINFO a.s. Základní vlastnosti: Na rozdíl od pasivních RFID systémů obsahují zdroj energie (primární baterie, akumulátor) Identifikátor tvoří mikroprocesor a vysílač
Globální polohové a navigační systémy
 Globální polohové a navigační systémy KGI/APGPS RNDr. Vilém Pechanec, Ph.D. Univerzita Palackého v Olomouci Univerzita Palackého v Olomouci I NVESTICE DO ROZVOJE V ZDĚLÁVÁNÍ Environmentální vzdělávání
Globální polohové a navigační systémy KGI/APGPS RNDr. Vilém Pechanec, Ph.D. Univerzita Palackého v Olomouci Univerzita Palackého v Olomouci I NVESTICE DO ROZVOJE V ZDĚLÁVÁNÍ Environmentální vzdělávání
DPLR. Seminář FI(A) LKPR 28.3.-29.3.2008 I.Lengál
 LKPR 28.3.-29.3.2008 I.Lengál") Seminář FI(A) LKPR 28.3.-29.3.2008 I.Lengál Obsah prezentace Bezpečnostní opatření ÚCL prostory Rozdělení vzdušného prostoru ve FIR LKAA a postupy pro VFR lety, FPL, noční lety VFR apod. Změny prostorů
Seminář FI(A) LKPR 28.3.-29.3.2008 I.Lengál Obsah prezentace Bezpečnostní opatření ÚCL prostory Rozdělení vzdušného prostoru ve FIR LKAA a postupy pro VFR lety, FPL, noční lety VFR apod. Změny prostorů
Systémy detekce a lokalizace blesků
 Systémy detekce a lokalizace blesků Petr Novák petr.novak@chmi.cz a Milan Šálek salek@chmi.cz Český hydrometeorologický ústav Globální elektrický obvod podmínky pěkného počasí 500kV, při zemi 130-140 V/m
Systémy detekce a lokalizace blesků Petr Novák petr.novak@chmi.cz a Milan Šálek salek@chmi.cz Český hydrometeorologický ústav Globální elektrický obvod podmínky pěkného počasí 500kV, při zemi 130-140 V/m
Počítačové sítě Datový spoj
 (Data Link) organizovaný komunikační kanál Datové jednotky rámce(frames) indikátory začátku a konce rámce režijní informace záhlaví event. zápatí rámce (identifikátor zdroje a cíle, řídící informace, informace
(Data Link) organizovaný komunikační kanál Datové jednotky rámce(frames) indikátory začátku a konce rámce režijní informace záhlaví event. zápatí rámce (identifikátor zdroje a cíle, řídící informace, informace
Návrh. VYHLÁŠKA ze dne 2004, kterou se stanoví rozsah údajů, které musí obsahovat žádost o udělení oprávnění k využívání rádiových kmitočtů
 Návrh VYHLÁŠKA ze dne 2004, kterou se stanoví rozsah údajů, které musí obsahovat žádost o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad stanoví podle 149 odst. 5 zákona č..../2004
Návrh VYHLÁŠKA ze dne 2004, kterou se stanoví rozsah údajů, které musí obsahovat žádost o udělení oprávnění k využívání rádiových kmitočtů Český telekomunikační úřad stanoví podle 149 odst. 5 zákona č..../2004
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II
 Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví Ing. Hana Staňková, Ph.D. Ing. Filip Závada GEODÉZIE II 8. Technologie GNSS Navigační systémy
Úloha B Měření parametrů GSM
 Úloha B Měření parametrů GSM 1. Zadání: Změřte GSM parametry a funkčnost svého mobilního telefonu pomocí daného testeru v operačním módu AUTOTEST v operačním módu FAULT FIND 2. Vypracování: Měřený přístroj:
Úloha B Měření parametrů GSM 1. Zadání: Změřte GSM parametry a funkčnost svého mobilního telefonu pomocí daného testeru v operačním módu AUTOTEST v operačním módu FAULT FIND 2. Vypracování: Měřený přístroj:
Žádost o udělení individuálního oprávnění k využívání rádiových kmitočtů
 Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČSKÝ TLKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČSKÝ TLKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
AS-Interface. AS-Interface. = Jednoduché systémové řešení
 AS-Interface = Jednoduché systémové řešení Představení technologie AS-Interface Technologie AS-Interface Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace AS-Interface
AS-Interface = Jednoduché systémové řešení Představení technologie AS-Interface Technologie AS-Interface Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace AS-Interface
Management přepravy nebezpečných věcí na evropské a národní úrovni ve vztahu k systému krizového řízení ČR
 Management přepravy nebezpečných věcí na evropské a národní úrovni ve vztahu k systému krizového řízení ČR WAK System spol. s r.o. AZIN CZ s.r.o. Telematix Services, a.s. 18.března 2010 Aktivity projektu
Management přepravy nebezpečných věcí na evropské a národní úrovni ve vztahu k systému krizového řízení ČR WAK System spol. s r.o. AZIN CZ s.r.o. Telematix Services, a.s. 18.března 2010 Aktivity projektu
LETECKÉ MAPY. Přednášející: LUKAS WÜNSCH
 LETECKÉ MAPY Přednášející: LUKAS WÜNSCH LICENCE SOUKROMÉHO PILOTA, ZKOUŠKY DOPRAVNÍHO PILOTA KLUZÁKY (VĚTRONĚ) OD ROKU 1989, UL LETOUNY, MOTOROVÉ LETOUNY AEROKLUB ROUDNICE NAD LABEM 2003-2014 ČESKÉ AEROLINIE
LETECKÉ MAPY Přednášející: LUKAS WÜNSCH LICENCE SOUKROMÉHO PILOTA, ZKOUŠKY DOPRAVNÍHO PILOTA KLUZÁKY (VĚTRONĚ) OD ROKU 1989, UL LETOUNY, MOTOROVÉ LETOUNY AEROKLUB ROUDNICE NAD LABEM 2003-2014 ČESKÉ AEROLINIE
AS-Interface. AS-Interface = Jednoduché systémové řešení. Představení technologie AS-Interface
 = Jednoduché systémové řešení Představení technologie Česká republika 2 Technologie Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace Diagnostika Přenos analogových
= Jednoduché systémové řešení Představení technologie Česká republika 2 Technologie Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace Diagnostika Přenos analogových
MRAR-L. Družicové navigační systémy. Č. úlohy 4 ZADÁNÍ ROZBOR
 MRAR-L ZADÁNÍ Č. úlohy 4 Družicové navigační systémy 4.1 Seznamte se s ovládáním GPS přijímače ORCAM 20 a vizualizačním programem pro Windows SiRFDemo. 4.2 Seznamte se s protokolem pro předávání zpráv
MRAR-L ZADÁNÍ Č. úlohy 4 Družicové navigační systémy 4.1 Seznamte se s ovládáním GPS přijímače ORCAM 20 a vizualizačním programem pro Windows SiRFDemo. 4.2 Seznamte se s protokolem pro předávání zpráv
Žádost o udělení individuálního oprávnění k využívání rádiových kmitočtů
 Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČSKÝ TLKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČSKÝ TLKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Žádost o udělení individuálního oprávnění k využívání rádiových kmitočtů
 Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČESKÝ TELEKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Sídlo Trvalý pobyt, Jednu možnost označit křížkem Jednu možnost označit křížkem ČESKÝ TELEKOMUNIKAČNÍ ÚŘAD se sídlem Sokolovská 219, Praha 9 poštovní přihrádka 02, 225 02 Praha 025 Žádost o udělení individuálního
Vrstvy periferních rozhraní
 Vrstvy periferních rozhraní Cíl přednášky Prezentovat, jak postupovat při analýze konkrétního rozhraní. Vysvětlit pojem vrstvy periferních rozhraní. Ukázat způsob využití tohoto pojmu na rozhraní RS 232.
Vrstvy periferních rozhraní Cíl přednášky Prezentovat, jak postupovat při analýze konkrétního rozhraní. Vysvětlit pojem vrstvy periferních rozhraní. Ukázat způsob využití tohoto pojmu na rozhraní RS 232.
POPIS STANDARDU CEN TC278/WG4. Oblast: TTI. Zkrácený název: Zprávy přes CN 3. Norma číslo:
 POPIS STANDARDU CEN TC278/WG4 Oblast: TTI Zkrácený název: Zprávy přes CN 3 Norma číslo: 14821-3 Norma název (en): Traffic and Traveller Information (TTI) TTI messages via cellular networks Part 3: Numbering
POPIS STANDARDU CEN TC278/WG4 Oblast: TTI Zkrácený název: Zprávy přes CN 3 Norma číslo: 14821-3 Norma název (en): Traffic and Traveller Information (TTI) TTI messages via cellular networks Part 3: Numbering
EXTRAKT z české technické normy
 EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním ICS 35.240.60 materiálem o normě. Dopravní telematika Vyhrazené spojení krátkého rozsahu (DSRC) Datová
EXTRAKT z české technické normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním ICS 35.240.60 materiálem o normě. Dopravní telematika Vyhrazené spojení krátkého rozsahu (DSRC) Datová
Vypracoval: Ing. Antonín POPELKA. Datum: 30. června 2005. Revize 01
 Popis systému Revize 01 Založeno 1990 Vypracoval: Ing. Antonín POPELKA Datum: 30. června 2005 SYSTÉM FÁZOROVÝCH MĚŘENÍ FOTEL Systém FOTEL byl vyvinut pro zjišťování fázových poměrů mezi libovolnými body
Popis systému Revize 01 Založeno 1990 Vypracoval: Ing. Antonín POPELKA Datum: 30. června 2005 SYSTÉM FÁZOROVÝCH MĚŘENÍ FOTEL Systém FOTEL byl vyvinut pro zjišťování fázových poměrů mezi libovolnými body
Používání neřízených letišť pro IFR provoz v Evropě
 Používání neřízených letišť pro IFR provoz v Evropě Magisterský projekt Filip Červený, 1 87 Obsah 1. Úvod 2. Neřízené letiště 3. IFR provoz 4. Státy, které využívají neřízené letiště pro IFR provoz 5.
Používání neřízených letišť pro IFR provoz v Evropě Magisterský projekt Filip Červený, 1 87 Obsah 1. Úvod 2. Neřízené letiště 3. IFR provoz 4. Státy, které využívají neřízené letiště pro IFR provoz 5.
Komunikace MOS s externími informačními systémy. Lucie Steinocherová
 Komunikace MOS s externími informačními systémy Lucie Steinocherová Vedoucí práce: Ing. Václav Novák, CSc. Školní rok: 2009-10 Abstrakt Hlavním tématem bakalářské práce bude vytvoření aplikace na zpracování
Komunikace MOS s externími informačními systémy Lucie Steinocherová Vedoucí práce: Ing. Václav Novák, CSc. Školní rok: 2009-10 Abstrakt Hlavním tématem bakalářské práce bude vytvoření aplikace na zpracování
9. PRINCIPY VÍCENÁSOBNÉHO VYUŽITÍ PŘENOSOVÝCH CEST
 9. PRINCIPY VÍCENÁSOBNÉHO VYUŽITÍ PŘENOSOVÝCH CEST Modulace tvoří základ bezdrátového přenosu informací na velkou vzdálenost. V minulosti se ji využívalo v telekomunikacích při vícenásobném využití přenosových
9. PRINCIPY VÍCENÁSOBNÉHO VYUŽITÍ PŘENOSOVÝCH CEST Modulace tvoří základ bezdrátového přenosu informací na velkou vzdálenost. V minulosti se ji využívalo v telekomunikacích při vícenásobném využití přenosových
Poznámka: UV, rentgenové a gamma záření se pro bezdrátovou komunikaci nepoužívají především pro svou škodlivost na lidské zdraví.
 BEZDRÁTOVÉ SÍTĚ Bezdrátová síť 1 je typ počítačové sítě, ve které je spojení mezi jednotlivými zařízeními realizováno prostřednictvím elektromagnetických (rádiových) vln nejčastěji ve frekvenčním pásmu
BEZDRÁTOVÉ SÍTĚ Bezdrátová síť 1 je typ počítačové sítě, ve které je spojení mezi jednotlivými zařízeními realizováno prostřednictvím elektromagnetických (rádiových) vln nejčastěji ve frekvenčním pásmu
AS-Interface. AS-Interface. = Jednoduché systémové řešení
 AS-Interface = Jednoduché systémové řešení Představení technologie AS-Interface Technologie AS-Interface Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace AS-Interface
AS-Interface = Jednoduché systémové řešení Představení technologie AS-Interface Technologie AS-Interface Přenosové vlastnosti Instalace Základní všeobecný popis Síťová topologie Princip komunikace AS-Interface
EXTRAKT z mezinárodní normy
 EXTRAKT z mezinárodní normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním materiálem o normě ICS: 35.240.60; 03.220.01 Komunikační infrastruktura pro pozemní mobilní zařízení (CALM)
EXTRAKT z mezinárodní normy Extrakt nenahrazuje samotnou technickou normu, je pouze informativním materiálem o normě ICS: 35.240.60; 03.220.01 Komunikační infrastruktura pro pozemní mobilní zařízení (CALM)
Disková pole (RAID) 1
 1") Disková pole (RAID) 1 Architektury RAID Důvod zavedení RAID: reakce na zvyšující se rychlost procesoru. Pozice diskové paměti v klasickém personálním počítači vyhovuje pro aplikace s jedním uživatelem.
Disková pole (RAID) 1 Architektury RAID Důvod zavedení RAID: reakce na zvyšující se rychlost procesoru. Pozice diskové paměti v klasickém personálním počítači vyhovuje pro aplikace s jedním uživatelem.
Měření satelitů. Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén.
 Měření satelitů Úvod Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén. Naším úkolem bylo popsat používání frekvenčního spektra
Měření satelitů Úvod Satelitní přenos je téměř nejpoužívanější provozování televize v Norsku. Protože Norsko má malou hustotu osídlení a členitý terén. Naším úkolem bylo popsat používání frekvenčního spektra
RADARY - SOUČASNĚ POUŽÍVANÉ SYSTÉMY
 Katedra Letecké dopravy Fakulta dopravní ČVUT v Praze RADARY - SOUČASNĚ POUŽÍVANÉ SYSTÉMY (semestrální práce z předmětu Letecká radiotechnika) David Přibyla Skupina 381 2005/2006 Obsah: 1 Úvod do problematiky...
Katedra Letecké dopravy Fakulta dopravní ČVUT v Praze RADARY - SOUČASNĚ POUŽÍVANÉ SYSTÉMY (semestrální práce z předmětu Letecká radiotechnika) David Přibyla Skupina 381 2005/2006 Obsah: 1 Úvod do problematiky...
OBSAH ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV
 ÚVODNÍ ČÁST PŘEDPIS L FRAZEOLOGIE OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH ZKRATKY i ii iii viii I. SPOJOVACÍ POSTUPY A. TECHNIKA ŘEČI I-1 1. Hláskovací abeceda
ÚVODNÍ ČÁST PŘEDPIS L FRAZEOLOGIE OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH ZKRATKY i ii iii viii I. SPOJOVACÍ POSTUPY A. TECHNIKA ŘEČI I-1 1. Hláskovací abeceda
Detekce kolizních situací pro malé civilní letouny
 České vysoké učení technické v Praze Fakulta elektrotechnická Katedra kybernetiky Bakalářská práce Detekce kolizních situací pro malé civilní letouny Štěpán Křivanec Vedoucí práce: Ing. Milan Rollo, Ph.D.
České vysoké učení technické v Praze Fakulta elektrotechnická Katedra kybernetiky Bakalářská práce Detekce kolizních situací pro malé civilní letouny Štěpán Křivanec Vedoucí práce: Ing. Milan Rollo, Ph.D.
ZÁVĚREČNÁ ZPRÁVA. Praha Leden 2019
 ÚSTAV PRO ODBORNÉ ZJIŠŤOVÁNÍ PŘÍČIN LETECKÝCH NEHOD Beranových 130 199 01 PRAHA 99 CZ-17-0472 ZÁVĚREČNÁ ZPRÁVA o odborném zjišťování příčin vážného incidentu - narušení schopnosti poskytovat bezpečné služby
ÚSTAV PRO ODBORNÉ ZJIŠŤOVÁNÍ PŘÍČIN LETECKÝCH NEHOD Beranových 130 199 01 PRAHA 99 CZ-17-0472 ZÁVĚREČNÁ ZPRÁVA o odborném zjišťování příčin vážného incidentu - narušení schopnosti poskytovat bezpečné služby
PŘÍLOHA. nařízení Komise v přenesené pravomoci,
 EVROPSKÁ KOMISE V Bruselu dne 12.10.2015 C(2015) 6823 final ANNEX 1 PART 9/11 PŘÍLOHA nařízení Komise v přenesené pravomoci, kterým se mění nařízení Rady (ES) č. 428/2009, kterým se zavádí režim Společenství
EVROPSKÁ KOMISE V Bruselu dne 12.10.2015 C(2015) 6823 final ANNEX 1 PART 9/11 PŘÍLOHA nařízení Komise v přenesené pravomoci, kterým se mění nařízení Rady (ES) č. 428/2009, kterým se zavádí režim Společenství
VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR
 SMĚROVÉ A DRUŽICOVÉ SPOJE Laboratorní úloha č. 1 VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR ZADÁNÍ 1) Seznamte se s modulem přijímače pro příjem a zpracování navigačních signálů systému GPS-Navstar
SMĚROVÉ A DRUŽICOVÉ SPOJE Laboratorní úloha č. 1 VLASTOSTI DRUŽICOVÉHO NAVIGAČNÍHO SYSTÉMU GPS-NAVSTAR ZADÁNÍ 1) Seznamte se s modulem přijímače pro příjem a zpracování navigačních signálů systému GPS-Navstar
OBSAH ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV ZKRATKY A SYMBOLY PŘÍRUČKY. HLAVA 1 Všeobecně 1-1. HLAVA 2 Údaje o letištích 2-1
 ÚVODNÍ ČÁST PŘEDPIS L14 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH ZKRATKY A SYMBOLY PŘÍRUČKY i iii v ix x HLAVA 1 Všeobecně 1-1 1.1 Definice 1-1 1.2 Použitelnost
ÚVODNÍ ČÁST PŘEDPIS L14 OBSAH KONTROLNÍ SEZNAM STRAN ÚVODNÍ USTANOVENÍ ÚČINNOST PŘEDPISU, ZMĚN A OPRAV OBSAH ZKRATKY A SYMBOLY PŘÍRUČKY i iii v ix x HLAVA 1 Všeobecně 1-1 1.1 Definice 1-1 1.2 Použitelnost
USPOŘÁDÁNÍ LETOVÉHO PROVOZU
 MINISTERSTVO DOPRAVY A SPOJŮ ČR POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY USPOŘÁDÁNÍ LETOVÉHO PROVOZU Doc 4444 / L 4444 Opatření Ministerstva dopravy a spojů č.j. 184/2002-220-SP ze dne 26.2.2002 KONTROLNÍ
MINISTERSTVO DOPRAVY A SPOJŮ ČR POSTUPY PRO LETOVÉ NAVIGAČNÍ SLUŽBY USPOŘÁDÁNÍ LETOVÉHO PROVOZU Doc 4444 / L 4444 Opatření Ministerstva dopravy a spojů č.j. 184/2002-220-SP ze dne 26.2.2002 KONTROLNÍ