Defektoskopie a klasifikace
|
|
|
- Silvie Slavíková
- před 8 lety
- Počet zobrazení:
Transkript

1 1 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
2 2 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.


.")

3 Počítačové vidění v průmyslu rozpoznávání 3 / 30 Identifikace 2D i 3D objektů na základě apriorní znalosti modelu nebo vyhledávání modelu v databázi pomocí obsahu (image retrieval, image content). Cambridge Neurodynamics Ltd. ANPR = Automatic Number Plate Recognition. CAMEA Ltd. Unicam Velocity, Unicam Red-light.








4 Počítačové vidění v průmyslu řízení 4 / 30 Navádění robotů na trajektorii: model prostředí + řídicí strategie. Robotický systém pro broušení a leštění vík tlakových hrnců řízení pohybu robota je založeno na vizuální detekci vzájemné polohy ramene a víka. Orpheus




,")




5 Počítačové vidění v průmyslu inspekce 5 / 30 Kontrola kvality: měření parametrů výrobků (1D,2D,3D), tvarová shoda s modelem, povrchová kontrola Planar Position Recognition and Identification. detekce kontur objektu nezávislost na otočení sub-pixelová přesnost
6 6 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
7 Defektoskopie a defektometrie definice 7 / 30 Defektoskopie = analýza defektů materiálu nedestruktivnost: vizuální metody analýza mikro i makro-struktury materiálu podle měřítka snímání Defektometrie = oblast metrologie zabývající se měřením vad materiálů metrologie: věda zabývající se měřením fyzikálních veličin


8 Defektoskopie a defektometrie senzory 8 / 30 Optické senzory: povrchové a tvarové defekty - speciální osvětlení pro praskliny, strukturu povrchu materiálu atd. Elektromagnetické senzory: podpovrchové defekty - vyhodnocení 2D nebo 3D obrazu Axiální osvětlení Tangenciální osvětlení
9 Defektoskopie a defektometrie schéma 9 / 30 Defektoskopické vyhodnocení výrobku v průmyslu: akceptace nebo zamítnutí. Technické prostředky kromě hlavního účelu kontroly umožňují zpravidla i servisní služby: Statistika provozu Monitorování stavu Archivace měřených dat : Služby Proces Pořízení obrazu Kontrola tvaru vyhovuje Měření rozměrů vyhovuje Proces - linka nevyhovuje nevyhovuje Proces - odpad
![Defektoskopie a defektometrie podmínky 10 / 30 Exaktní specifikace: rozměry výrobku (absolutní [m], relativní [%]) výrobní tolerance (absolutní [m], relativní [%]) zajištění stabilní deklarované](/docs-images/65/52853078/images/10-0.jpg "polohy objektu při snímání viditelnost částí objektu bez společné hranice s okrajem snímku Pozice a orientace objektu na snímku: přesně vymezená polohovací mechanikou často předem známa pouze oblast")
10 Defektoskopie a defektometrie podmínky 10 / 30 Exaktní specifikace: rozměry výrobku (absolutní [m], relativní [%]) výrobní tolerance (absolutní [m], relativní [%]) zajištění stabilní deklarované polohy objektu při snímání viditelnost částí objektu bez společné hranice s okrajem snímku Pozice a orientace objektu na snímku: přesně vymezená polohovací mechanikou často předem známa pouze oblast výskytu (smyčka) lokalizace objektu obrazová reprezentace feritového E-jádra na ortogonálních snímcích
11 11 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
 Optické soustavy (vnitřní ztráty) =")
 chyba = rovnoběžné paprsky v předmětové rovině neprochází jedním bodem (ohniskem) v obrazové rovině obraz bodu = neostrá ploška. 2.")
12 Zařízení v defektoskopii optická soustava I. 12 / 30 Projekce předmětu na senzor představuje vždy ztrátovou transformaci způsobenou vlivem: Atmosféry (vnější ztráty) Optické soustavy (vnitřní ztráty) = zejména při astronomickém pozorování (tele-objektiv). = zejména při přesné defektoskopii (makro-objektiv). Aberace optické soustavy: 1. Sférická (kulová) chyba = rovnoběžné paprsky v předmětové rovině neprochází jedním bodem (ohniskem) v obrazové rovině obraz bodu = neostrá ploška. 2. Asymetrická chyba (koma) = mimo-osý bod v předmětové rovině zobrazený širokým paprskovým svazkem není v obrazové rovině zobrazen jako bod obraz bodu = čárový vzor.
. 4.")
13 Zařízení v defektoskopii optická soustava II. 13 / Astigmatismus = mimo-osý bod v předmětové rovině zobrazený úzkým paprskovým svazkem je v obrazové rovině zobrazen jako elipsa (popř. čára nebo kruh). 4. Zklenutí obrazového pole = body z předmětové roviny se v obrazovém prostoru zobrazují ostře v různých vzdálenostech (za sebou ležících obrazových rovinách).
 = zvětšení optické soustavy je v různých místech předmětové roviny různé (zpravidla symetrické kolem optické osy soustavy) čtverec = strany prohnuté dovnitř (poduška zvětšení")
14 Zařízení v defektoskopii optická soustava III. 14 / Zkreslení (distorze) = zvětšení optické soustavy je v různých místech předmětové roviny různé (zpravidla symetrické kolem optické osy soustavy) čtverec = strany prohnuté dovnitř (poduška zvětšení směrem od středu roste) nebo strany prohnuté ven (soudek zvětšení směrem od středu klesá). 6. Chromatická chyba = vada zobrazení způsobená disperzí materiálu optické soustavy (tj. závislost indexu lomu čočky na vlnové délce různé vlnové délky mají různá ohniska) bod zobrazen ostře vždy jen pro jednu vlnovou délku.
 pomocné kritérium, udává minimální a maximální diferenci mezi skutečnou a ideální optickou")
 = SR (Strehl Ratio) poměr energie Airyho disku skutečné optické soustavy")
 poměr modulace optického signálu na vstupu a výstupu soustavy (představuje přesný ukazatel kvality optické")
15 Zařízení v defektoskopii optická soustava IV. 15 / 30 Ukazatele fyzické kvality = PV (peak-valley) pomocné kritérium, udává minimální a maximální diferenci mezi skutečnou a ideální optickou plochou. = RMS (root-mean-square)... směrodatná odchylka skutečné od ideální optické plochy (měřeno v mnoha bodech povrchu). Ukazatele optické kvality Difrakční kroužky (prostřední je Airyho disk) = SR (Strehl Ratio) poměr energie Airyho disku skutečné optické soustavy vzhledem k její teoretické maximální hodnotě (energie Airyho disku ideální optické soustavy). = MTF (Module Transfer Function) poměr modulace optického signálu na vstupu a výstupu soustavy (představuje přesný ukazatel kvality optické soustavy). Modulace M: M A A max min = Amax, Amin Amax + Amin = maximální a minimální intenzita Pro výpočet M se používají testovací obrazce (např. Koren2003, Siemensova hvězda):
 = H ( u, v) e jφ ( u, v) = MTF( u, v) e jptf ( u, v) H ( u, v) jφ ( u, v) e = F{ h( x, y)} h( x, y) = impulsní odezva soustavy Průběh MTF = závislost přenosu")
16 Zařízení v defektoskopii optická soustava V. 16 / 30 MTF = poměr modulace M in na vstupu optické soustavy k modulaci M out na jejím výstupu. Přenos optické soustavy OTF: OTF( u, v) = H ( u, v) e jφ ( u, v) = MTF( u, v) e jptf ( u, v) H ( u, v) jφ ( u, v) e = F{ h( x, y)} h( x, y) = impulsní odezva soustavy Průběh MTF = závislost přenosu modulace na: 1. Koren - počtu period (dvojic čar) na mm [period/mm] 2. Siemens - vzdálenosti od středu soustavy [mm]







17 Zařízení v defektoskopii priority 17 / 30 Primární parametr Sekundární parametr Moderní parametr = spolehlivost-rychlost-přesnost = cena = spolehlivost-rychlost-přesnost-cena Zařízení Uživatelské Průmyslové Hi-end Osvětlení 7.000, , Objektivy 6.000, , Kamery , ,
18 18 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
19 Metody v defektoskopii 19 / 30 Metody předzpracování obrazu: filtrace šumu korekce geometrických zkreslení bodové jasové transformace lokální jasové transformace : Klasické segmentační metody: prahování (prosté, adaptivní, procentní, ) detekce hran (konvoluce, diference) geometrické transformace (Hough, Wavelet, Radon, ) : Účelové klasifikační mechanismy: distanční transformace + Hausdorffova vzdálenost + srovnávací výpočet (viz příklad dále)
20 20 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
 výstupního obrazu je dána vztahem: D P ( p) = min q P p q Neformálně: hodnota bodu p výstupního obrazu je rovna jeho vzdálenosti od nejbližšího nenulového bodu vstupního")
21 Distanční transformace definice 21 / 30 Konverze vstupního binárního obrazu P na výstupní obraz D P celočíselných hodnot. Výsledek distanční transformace D P se nazývá distanční mapa. Formálně: hodnota D P (p) výstupního obrazu je dána vztahem: D P ( p) = min q P p q Neformálně: hodnota bodu p výstupního obrazu je rovna jeho vzdálenosti od nejbližšího nenulového bodu vstupního binárního obrazu. Maximální možná hodnota D P je dána vzdáleností diagonálních rohových bodů obrazu: ~ max( D P ) = P(1,1) P( x max, y max ) obraz P distanční mapa D P
22 Distanční transformace metrika 22 / 30 Nejčastější metriky použité pro aproximaci vzdálenosti bodů P a Q v prostoru R n : Euklidovská: d 2 2 E ( P, Q) = ( p1 q1) ( pn qn) Manhattan (cityblock): d M ( P, Q) p1 q1 = p n q n Chessboard: d C ( P, Q) = max( p q1,..., p q 1 n n )
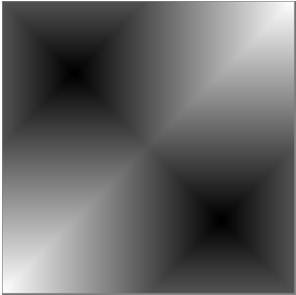
23 Distanční transformace metrika 23 / 30 Obraz Euklidovská m. Manhattan m. Chessboard m. Bod: Dva body: Šachovnice: Tvar:
24 Distanční transformace algoritmus 24 / 30 Definiční algoritmus: pro každý bod p výstupního obrazu jsou spočítány vzdálenosti p-q ke všem nenulovým bodům q vstupního obrazu a z nich je vybrána minimální hodnota. Výpočetní náročnost roste s kvadrátem počtu pixelů vstupního obrazu. K výpočtu se využívají algoritmy aproximující zvolenou metriku vzdálenosti lišící se výpočetní a paměťovou náročností a přesností aproximace. Zpravidla lineární nárůst výpočetní náročnosti s počtem pixelů vstupního obrazu. Algoritmy výpočtu: Danielssonův: 4SED nebo 8SED podle okolí pouze pro 2D obrazy. Corner EDT: rozšíření Danielssonova algoritmu pro 3D obrazy. D-Euclidean (DED): pro libovolnou dimenzi, podle okolí (sousednosti) má pro 2D obrazy dvě verze: DED4 a DED8. Pro 3D obrazy tři verze: DED6, DED18 a DED26. Saito-Toriwaki: libovolná dimenze zpravidla pomalejší, než DED, ale s nižší paměťovou náročností. Cityblock based: velmi rychlé algoritmy s nízkou paměťovou složitostí pro 2D i 3D obrazy, ale také nízkou přesností vzhledem k Euklidovské distanční mapě. Chamfer based: velmi rychlé algoritmy s nízkou paměťovou složitostí pro 2D i 3D obrazy.
25 25 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.
26 Hausdorffova vzdálenost definice 26 / 30 Měřítko podobnosti mezi dvěma libovolnými konečnými množinami A a B. Formálně: klasická Hausdorffova vzdálenost h(a,b) je dána vztahem: h( Α, B) = max min a A b B a b Neformálně: h(a,b) bude malá, pokud každý prvek z A bude blízký některému prvku z B. Obráceně h(a,b) bude velká, ikdyž jen jeden prvek z A bude vzdálen všem prvkům z B. Hausdorffova vzdálenost je orientovaná, neplatí tedy komutativnost argumentu: h( Α, B) h( B, A) Jeden prvek z A výrazně vzdálen od všech bodů z B např. vlivem chyby měření způsobí vysokou hodnotu h(a,b) klasická definice není vhodná pro praktické úlohy. Modifikovaná Hausdorffova vzdálenost h f (A,B): h f ( Α, B ) = f a A min b B a b h f (A,B) nevyhledává maximum, ale f-kvantil ze souboru minimálních vzdáleností (např. medián, pokud f=0.5) míra tolerance vůči chybám v souboru dat je určena f-kvantilem.
27 27 / 30 Defektoskopie a klasifikace Karel Horák Rozvrh přednášky: 1. Počítačové vidění v průmyslu. 2. Defektoskopie a defektometrie. 3. Zařízení v defektoskopii. 4. Metody v defektoskopii. 5. Distanční transformace. 6. Hausdorffova vzdálenost. 7. Srovnávání se vzorem.



28 Srovnávání se vzorem výpočet 28 / 30 Vstupní obraz měřeného objektu je normalizován. Cílem je: 1. Korekce optických vad vzniklých nedokonalostí snímací soustavy (kamera, objektiv, geometrie snímání, perspektiva ). 2. Normalizace velikosti obrazu z kalibračních bodů na snímku. Příklad: srovnávání měřených dat se vzorem obrazu feritového E-jádra: Postup algoritmu: 1. Výpočet kontury referenčního modelu. 2. Výpočet DT referenčního modelu. 3. Výpočet kontury měřeného objektu. 4. Výpočet a superpozice referenčních bodů 5. Pro přípustné relativní polohy měřeného 6. Výpočet minima HD.
29 Srovnávání se vzorem výpočet 29 / 30 Postup algoritmu: 1. Výpočet kontury referenčního modelu. 2. Výpočet DT referenčního modelu. 3. Výpočet kontury měřeného objektu. 4. Výpočet a superpozice referenčních bodů obou množin. 5. Pro přípustné relativní polohy měřeného objektu a modelu provést výpočet h f (A,B) pomocí korespondence kontury měřeného objektu a distanční mapy modelu. 6. Výpočet globálního minima {h f (A,B)}.
30 Srovnávání se vzorem přesnost 30 / 30 Cílem algoritmu je najít správnou superpoziční polohu, v níž se korektní části objektu překrývají a poškozené míjí. Zelená kontura = měřený objekt. Modrá kontura = referenční model. Správné překrytí Minimalizace h(a,b) Minimalizace h f=0.5 (A,B) Výběr minima h f=0.5 (A,B) necitlivost na nekompletnost množiny měřených dat.
Defektoskopie a defektometrie
 Defektoskopie a defektometrie Aplikace počítačového vidění Karel Horák Skupina počítačového ového vidění Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií Vysoké
Defektoskopie a defektometrie Aplikace počítačového vidění Karel Horák Skupina počítačového ového vidění Ústav automatizace a měřicí techniky Fakulta elektrotechniky a komunikačních technologií Vysoké
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Optika pro mikroskopii materiálů I
 Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
M I K R O S K O P I E
 Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Analýza pohybu. Karel Horák. Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok.
 1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
Frekvenční analýza optických zobrazovacích systémů
 OPT/OZI L05 Frekvenční analýza optických zobrazovacích systémů obecný model vstupní pupila výstupní pupila v z u y z o x z i difrakčně limitovaný zobrazovací systém: rozbíhavá sférická vlna od bodového
OPT/OZI L05 Frekvenční analýza optických zobrazovacích systémů obecný model vstupní pupila výstupní pupila v z u y z o x z i difrakčně limitovaný zobrazovací systém: rozbíhavá sférická vlna od bodového
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU
 ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU J. Novák, P. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán software pro počítačovou simulaci
ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU J. Novák, P. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán software pro počítačovou simulaci
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Vliv komy na přesnost měření optických přístrojů. Antonín Mikš Katedra fyziky, FSv ČVUT, Praha
 Vliv komy na přesnost měření optických přístrojů Antonín Mikš Katedra fyziky, FSv ČVUT, Praha V práci je vyšetřován vliv meridionální komy na přesnost měření optickými přístroji a to na základě difrakční
Vliv komy na přesnost měření optických přístrojů Antonín Mikš Katedra fyziky, FSv ČVUT, Praha V práci je vyšetřován vliv meridionální komy na přesnost měření optickými přístroji a to na základě difrakční
Viková, M. : MIKROSKOPIE I Mikroskopie I M. Viková
 Mikroskopie I M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz MIKROSVĚT nano Poměry velikostí mikro 9 10 10 8 10 7 10 6 10 5 10 4 10 3 size m 2 9 7 5 3 4 8 1 micela virus světlo 6 písek molekula
Mikroskopie I M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz MIKROSVĚT nano Poměry velikostí mikro 9 10 10 8 10 7 10 6 10 5 10 4 10 3 size m 2 9 7 5 3 4 8 1 micela virus světlo 6 písek molekula
Úvod do zpracování obrazů. Petr Petyovský Miloslav Richter
 Úvod do zpracování obrazů Petr Petyovský Miloslav Richter 1 OBSAH Motivace, prvky a základní problémy počítačového vidění, pojem scéna Terminologie, obraz, zpracování a analýza obrazu, počítačové vidění,
Úvod do zpracování obrazů Petr Petyovský Miloslav Richter 1 OBSAH Motivace, prvky a základní problémy počítačového vidění, pojem scéna Terminologie, obraz, zpracování a analýza obrazu, počítačové vidění,
Digitální fotogrammetrie
 Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
9. Geometrická optika
 9. Geometrická optika 1 Popis pomocí světelných paprsků těmi se šíří energie a informace, zanedbává vlnové vlastnosti světla světelný paprsek = křivka (často přímka), podél níž se šíří světlo, jeho energie
9. Geometrická optika 1 Popis pomocí světelných paprsků těmi se šíří energie a informace, zanedbává vlnové vlastnosti světla světelný paprsek = křivka (často přímka), podél níž se šíří světlo, jeho energie
Centrovaná optická soustava
 Centrovaná optická soustava Dvě lámavé kulové ploch: Pojem centrovaná optická soustava znamená, že splývají optické os dvou či více optických prvků. Základním příkladem takové optické soustav jsou dvě
Centrovaná optická soustava Dvě lámavé kulové ploch: Pojem centrovaná optická soustava znamená, že splývají optické os dvou či více optických prvků. Základním příkladem takové optické soustav jsou dvě
Návrh optické soustavy - Obecný postup
 Inovace a zvýšení atraktivity studia optiky reg. c.: CZ.1.07/2.2.00/07.0289 Přednášky - Metody Návrhu Zobrazovacích Soustav SLO/MNZS Návrh optické soustavy - Obecný postup Miroslav Palatka Tento projekt
Inovace a zvýšení atraktivity studia optiky reg. c.: CZ.1.07/2.2.00/07.0289 Přednášky - Metody Návrhu Zobrazovacích Soustav SLO/MNZS Návrh optické soustavy - Obecný postup Miroslav Palatka Tento projekt
Analýza dat v GIS. Dotazy na databáze. Překrytí Overlay Mapová algebra Vzdálenostní funkce. Funkce souvislosti Interpolační funkce Topografické funkce
 Analýza dat v GIS Dotazy na databáze Prostorové Atributové Překrytí Overlay Mapová algebra Vzdálenostní funkce Euklidovské vzdálenosti Oceněné vzdálenosti Funkce souvislosti Interpolační funkce Topografické
Analýza dat v GIS Dotazy na databáze Prostorové Atributové Překrytí Overlay Mapová algebra Vzdálenostní funkce Euklidovské vzdálenosti Oceněné vzdálenosti Funkce souvislosti Interpolační funkce Topografické
Geometrické transformace
 1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Spektrální charakteristiky
 Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Pozorování Slunce s vysokým rozlišením. Michal Sobotka Astronomický ústav AV ČR, Ondřejov
 Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
Popis objektů. Karel Horák. Rozvrh přednášky:
 1 / 41 Popis objektů Karel Horák Rozvrh přednášky: 1. Úvod.. Příznakový vektor. 3. Příznakový prostor. 4. Členění příznaků. 5. Identifikace oblastí. 6. Radiometrické deskriptory. 7. Fotometrické deskriptory.
1 / 41 Popis objektů Karel Horák Rozvrh přednášky: 1. Úvod.. Příznakový vektor. 3. Příznakový prostor. 4. Členění příznaků. 5. Identifikace oblastí. 6. Radiometrické deskriptory. 7. Fotometrické deskriptory.
Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů)
") Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů) Autor: Vladimir Vapnik Vapnik, V. The Nature of Statistical Learning Theory.
Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů) Autor: Vladimir Vapnik Vapnik, V. The Nature of Statistical Learning Theory.
Úvod, optické záření. Podkladový materiál k přednáškám A0M38OSE Obrazové senzory ČVUT- FEL, katedra měření, Jan Fischer, 2014
 Úvod, optické záření Podkladový materiál k přednáškám A0M38OSE Obrazové senzory ČVUT- FEL, katedra měření, Jan Fischer, 2014 Materiál je pouze grafickým podkladem k přednášce a nenahrazuje výklad na vlastní
Úvod, optické záření Podkladový materiál k přednáškám A0M38OSE Obrazové senzory ČVUT- FEL, katedra měření, Jan Fischer, 2014 Materiál je pouze grafickým podkladem k přednášce a nenahrazuje výklad na vlastní
Geometrická optika. předmětu. Obrazový prostor prostor za optickou soustavou (většinou vpravo), v němž může ležet obraz - - - 1 -
, v němž může ležet obraz - - - 1 -") Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Přednáška 2_1. Konstrukce obrazu v mikroskopu Vady čoček Rozlišovací schopnost mikroskopu
 Přednáška 2_1 Konstrukce obrazu v mikroskopu Vady čoček Rozlišovací schopnost mikroskopu Pavla Válová, 2018 Geometrie zobrazování spojnou čočkou: Paprsky důležité při konstrukci obrazů vytvořených čočkou*:
Přednáška 2_1 Konstrukce obrazu v mikroskopu Vady čoček Rozlišovací schopnost mikroskopu Pavla Válová, 2018 Geometrie zobrazování spojnou čočkou: Paprsky důležité při konstrukci obrazů vytvořených čočkou*:
Světlo x elmag. záření. základní principy
 Světlo x elmag. záření základní principy Jak vzniká a co je to duha? Spektrum elmag. záření Viditelné 380 760 nm, UV 100 380 nm, IR 760 nm 1mm Spektrum elmag. záření Harmonická vlna Harmonická vlna E =
Světlo x elmag. záření základní principy Jak vzniká a co je to duha? Spektrum elmag. záření Viditelné 380 760 nm, UV 100 380 nm, IR 760 nm 1mm Spektrum elmag. záření Harmonická vlna Harmonická vlna E =
Defektoskopie. 1 Teoretický úvod. Cíl cvičení: Detekce měřicího stavu a lokalizace objektu
 Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny
 Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
NOVÉ METODY HODNOCENÍ OBRAZOVÉ KVALITY
 NOVÉ METODY HODNOCENÍ OBRAZOVÉ KVALITY Stanislav Vítek, Petr Páta, Jiří Hozman Katedra radioelektroniky, ČVUT FEL Praha, Technická 2, 166 27 Praha 6 E-mail: svitek@feld.cvut.cz, pata@feld.cvut.cz, hozman@feld.cvut.cz
NOVÉ METODY HODNOCENÍ OBRAZOVÉ KVALITY Stanislav Vítek, Petr Páta, Jiří Hozman Katedra radioelektroniky, ČVUT FEL Praha, Technická 2, 166 27 Praha 6 E-mail: svitek@feld.cvut.cz, pata@feld.cvut.cz, hozman@feld.cvut.cz
Distribuované sledování paprsku
 Distribuované sledování paprsku 1996-2015 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz DistribRT 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 24 Distribuované
Distribuované sledování paprsku 1996-2015 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz DistribRT 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 24 Distribuované
SIFT: Scale Invariant Feature Transform Automatické nalezení korespondencí mezi dvojicí obrázků
 SIFT: Scale Invariant Feature Transform Automatické nalezení korespondencí mezi dvojicí obrázků lukas.mach@gmail.com Přílohy (videa, zdrojáky, ) ke stažení na: http://mach.matfyz.cz/sift Korespondence
SIFT: Scale Invariant Feature Transform Automatické nalezení korespondencí mezi dvojicí obrázků lukas.mach@gmail.com Přílohy (videa, zdrojáky, ) ke stažení na: http://mach.matfyz.cz/sift Korespondence
Kybernetika a umělá inteligence, cvičení 10/11
 Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
POČÍTAČOVÁ SIMULACE VLIVU CHYB PENTAGONÁLNÍHO HRANOLU NA PŘESNOST MĚŘENÍ V GEODÉZII. A.Mikš 1, V.Obr 2
 POČÍTAČOVÁ SIMULACE VLIVU CHYB PENTAGONÁLNÍHO HRANOLU NA PŘESNOST MĚŘENÍ V GEODÉZII A.Mikš 1, V.Obr 1 Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt:
POČÍTAČOVÁ SIMULACE VLIVU CHYB PENTAGONÁLNÍHO HRANOLU NA PŘESNOST MĚŘENÍ V GEODÉZII A.Mikš 1, V.Obr 1 Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt:
ZPRACOVÁNÍ DAT DÁLKOVÉHO PRŮZKUMU
 A - zdroj záření B - záření v atmosféře C - interakce s objektem D - změření záření přístrojem E - přenos, příjem dat F - zpracování dat G - využití informace v aplikaci Typ informace získávaný DPZ - vnitřní
A - zdroj záření B - záření v atmosféře C - interakce s objektem D - změření záření přístrojem E - přenos, příjem dat F - zpracování dat G - využití informace v aplikaci Typ informace získávaný DPZ - vnitřní
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ
 VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
VÝUKOVÝ SOFTWARE PRO ANALÝZU A VIZUALIZACI INTERFERENČNÍCH JEVŮ P. Novák, J. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán výukový software pro
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje
 Optické zobrazování Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje Základní pojmy Optické zobrazování - pomocí paprskové (geometrické) optiky - využívá model světelného
Optické zobrazování Základní pojmy Zobrazení zrcadlem, Zobrazení čočkou Lidské oko, Optické přístroje Základní pojmy Optické zobrazování - pomocí paprskové (geometrické) optiky - využívá model světelného
Rozdělení přístroje zobrazovací
 Optické přístroje úvod Rozdělení přístroje zobrazovací obraz zdánlivý subjektivní přístroje lupa mikroskop dalekohled obraz skutečný objektivní přístroje fotoaparát projekční přístroje přístroje laboratorní
Optické přístroje úvod Rozdělení přístroje zobrazovací obraz zdánlivý subjektivní přístroje lupa mikroskop dalekohled obraz skutečný objektivní přístroje fotoaparát projekční přístroje přístroje laboratorní
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Zpracování obrazu a fotonika 2006
 Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Moderní metody rozpoznávání a zpracování obrazových informací 15
 Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
VY_32_INOVACE_FY.12 OPTIKA II
 VY_32_INOVACE_FY.12 OPTIKA II Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Optická čočka je optická soustava dvou centrovaných
VY_32_INOVACE_FY.12 OPTIKA II Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Optická čočka je optická soustava dvou centrovaných
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
OBRAZOVÁ ANALÝZA. Speciální technika a měření v oděvní výrobě
 OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
Fokální korektory. Okuláry. Miroslav Palatka
 Přednášky - Přístroje pro astronomii 1 Fokální korektory Příslušenství - doplňky Okuláry Miroslav Palatka Palatka SLO/PA1 2011 1 Fokální korektory korektory aberací v blízkosti ohniskové roviny Korektory
Přednášky - Přístroje pro astronomii 1 Fokální korektory Příslušenství - doplňky Okuláry Miroslav Palatka Palatka SLO/PA1 2011 1 Fokální korektory korektory aberací v blízkosti ohniskové roviny Korektory
Automatické rozpoznávání dopravních značek
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
Algoritmizace prostorových úloh
 Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Geometrická optika. Optické přístroje a soustavy. převážně jsou založeny na vzájemné interakci světelného pole s látkou nebo s jiným fyzikálním polem
 Optické přístroje a soustav Geometrická optika převážně jsou založen na vzájemné interakci světelného pole s látkou nebo s jiným fzikálním polem Důsledkem této t to interakce je: změna fzikáln lních vlastností
Optické přístroje a soustav Geometrická optika převážně jsou založen na vzájemné interakci světelného pole s látkou nebo s jiným fzikálním polem Důsledkem této t to interakce je: změna fzikáln lních vlastností
Automatická detekce anomálií při geofyzikálním průzkumu. Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011
 Automatická detekce anomálií při geofyzikálním průzkumu Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011 Cíle doktorandské práce Seminář 10. 11. 2010 Najít, implementovat, ověřit a do praxe
Automatická detekce anomálií při geofyzikálním průzkumu Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011 Cíle doktorandské práce Seminář 10. 11. 2010 Najít, implementovat, ověřit a do praxe
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY
 MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 6) Snímání obrazu Petr Lobaz, 24. 3. 2009 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D MHS Snímání obrazu 2 / 41 ZPRACOVÁNÍ OBRAZU pořízení
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 6) Snímání obrazu Petr Lobaz, 24. 3. 2009 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D MHS Snímání obrazu 2 / 41 ZPRACOVÁNÍ OBRAZU pořízení
Nová koncepční a konstrukční řešení pro zobrazení s PMS
 Nová koncepční a konstrukční řešení pro zobrazení s PMS P. Bouchal (FSI VUT Brno) a Z. Bouchal (KO PřF UP Olomouc) PB 4 Zobrazování s podporou technologie PMS Garant: R. Chmelík Program PB4: Metody a systémy
Nová koncepční a konstrukční řešení pro zobrazení s PMS P. Bouchal (FSI VUT Brno) a Z. Bouchal (KO PřF UP Olomouc) PB 4 Zobrazování s podporou technologie PMS Garant: R. Chmelík Program PB4: Metody a systémy
Hodnocení kvality optických přístrojů III
 Hodnocení kvality optických přístrojů III Ronchiho test Potřeba testovat kvalitu optických přístrojů je stejně stará jako optické přístroje samy. Z počátečních přístupů typu pokus-omyl v polovině 18. století
Hodnocení kvality optických přístrojů III Ronchiho test Potřeba testovat kvalitu optických přístrojů je stejně stará jako optické přístroje samy. Z počátečních přístupů typu pokus-omyl v polovině 18. století
Korekce souřadnic. 2s [ rad] R. malé změny souřadnic, které je nutno uvažovat při stanovení polohy astronomických objektů. výška pozorovatele
![Korekce souřadnic. 2s [ rad] R. malé změny souřadnic, které je nutno uvažovat při stanovení polohy astronomických objektů. výška pozorovatele](/thumbs/51/28250241.jpg "Korekce souřadnic. 2s [ rad] R. malé změny souřadnic, které je nutno uvažovat při stanovení polohy astronomických objektů. výška pozorovatele") OPT/AST L07 Korekce souřadnic malé změny souřadnic, které je nutno uvažovat při stanovení polohy astronomických objektů výška pozorovatele konečný poloměr země R výška h objektu závisí na výšce s stanoviště
OPT/AST L07 Korekce souřadnic malé změny souřadnic, které je nutno uvažovat při stanovení polohy astronomických objektů výška pozorovatele konečný poloměr země R výška h objektu závisí na výšce s stanoviště
1 3D snímání: Metody a snímače
 1 3D snímání: Metody a snímače Nejprve je potřeba definovat, že se v rámci tohoto předmětu budeme zabývat pouze bezkontaktními metodami zisku hloubkové informace. Metody pro 3D snímání lze dělit v podstatě
1 3D snímání: Metody a snímače Nejprve je potřeba definovat, že se v rámci tohoto předmětu budeme zabývat pouze bezkontaktními metodami zisku hloubkové informace. Metody pro 3D snímání lze dělit v podstatě
Fourierovské metody v teorii difrakce a ve strukturní analýze
 Osnova přednášky na 31 kolokviu Krystalografické společnosti Výpočetní metody v rtg a neutronové strukturní analýze Nové Hrady, 16 20 6 2003 Fourierovské metody v teorii difrakce a ve strukturní analýze
Osnova přednášky na 31 kolokviu Krystalografické společnosti Výpočetní metody v rtg a neutronové strukturní analýze Nové Hrady, 16 20 6 2003 Fourierovské metody v teorii difrakce a ve strukturní analýze
Matematika I 12a Euklidovská geometrie
 Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
Analýza obrazu II. Jan Macháček Ústav skla a keramiky VŠCHT Praha
 Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Maticová optika. Lenka Přibylová. 24. října 2010
 Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Maticová optika Lenka Přibylová 24. října 2010 Maticová optika Při průchodu světla optickými přístroji dochází k transformaci světelného paprsku, vlnový vektor mění úhel, který svírá s optickou osou, paprsek
Rosenblattův perceptron
 Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY
 1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
1 VZNIK, VÝVOJ A DEFINICE MECHATRONIKY 1.1 VÝVOJ MECHATRONIKY Ve vývoji mechatroniky lze vysledovat tři období: 1. etapa polovina 70. let, Japonsko, založení nového oboru shrnuje poznatky z mechaniky,
Restaurace (obnovení) obrazu při známé degradaci
 obrazu při známé degradaci") Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů
 obrazů") ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM. Fyzikální praktikum 2
 Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM Fyzikální praktikum 2 Zpracoval: Markéta Kurfürstová Naměřeno: 16. října 2012 Obor: B-FIN Ročník: II Semestr: III
Fyzikální sekce přírodovědecké fakulty Masarykovy univerzity v Brně FYZIKÁLNÍ PRAKTIKUM Fyzikální praktikum 2 Zpracoval: Markéta Kurfürstová Naměřeno: 16. října 2012 Obor: B-FIN Ročník: II Semestr: III
Otázky z optiky. Fyzika 4. ročník. Základní vlastnosti, lom, odraz, index lomu
 Otázky z optiky Základní vlastnosti, lom, odraz, index lomu ) o je světlo z fyzikálního hlediska? Jaké vlnové délky přísluší viditelnému záření? - elektromagnetické záření (viditelné záření) o vlnové délce
Otázky z optiky Základní vlastnosti, lom, odraz, index lomu ) o je světlo z fyzikálního hlediska? Jaké vlnové délky přísluší viditelnému záření? - elektromagnetické záření (viditelné záření) o vlnové délce
5. Umělé neuronové sítě. Neuronové sítě
 Neuronové sítě Přesný algoritmus práce přírodních neuronových systémů není doposud znám. Přesto experimentální výsledky na modelech těchto systémů dávají dnes velmi slibné výsledky. Tyto systémy, včetně
Neuronové sítě Přesný algoritmus práce přírodních neuronových systémů není doposud znám. Přesto experimentální výsledky na modelech těchto systémů dávají dnes velmi slibné výsledky. Tyto systémy, včetně
ZPRACOVÁNÍ OBRAZU přednáška 3
 ZPRACOVÁNÍ OBRAZU přednáška 3 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ZPRACOVÁNÍ OBRAZU přednáška 3 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
- Ideálně koherentním světelným svazkem se rozumí elektromagnetické vlnění o stejné frekvenci, stejném směru kmitání a stejné fázi.
 P7: Optické metody - V klasické optice jsou interferenční a difrakční jevy popisovány prostřednictvím ideálně koherentních, ideálně nekoherentních, později také částečně koherentních světelných svazků
P7: Optické metody - V klasické optice jsou interferenční a difrakční jevy popisovány prostřednictvím ideálně koherentních, ideálně nekoherentních, později také částečně koherentních světelných svazků
Sítě SFN Systém pro analýzu a vizualizaci pokrytí a rušení vysílacích sítí
 Sítě SFN Systém pro analýzu a vizualizaci pokrytí a rušení vysílacích sítí Sítě SFN ver. 7 je výpočetní systém pro analýzu pokrytí a rušení vysílacích sítí pro služby FM, TV, DVB- T a T-DAB a analýzu a
Sítě SFN Systém pro analýzu a vizualizaci pokrytí a rušení vysílacích sítí Sítě SFN ver. 7 je výpočetní systém pro analýzu pokrytí a rušení vysílacích sítí pro služby FM, TV, DVB- T a T-DAB a analýzu a
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY
 MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 5) Statický bitmapový obraz (poprvé) Petr Lobaz, 17. 3. 2004 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D 2 /33 ZPRACOVÁNÍ OBRAZU pořízení
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 5) Statický bitmapový obraz (poprvé) Petr Lobaz, 17. 3. 2004 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D 2 /33 ZPRACOVÁNÍ OBRAZU pořízení
REALIZACE BAREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚ-FREKVENČNÍ OBLASTI SPEKTRA
 REALIZACE AREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚFREKVENČNÍ OLASTI SPEKTRA. Úvod Antonín Mikš Jiří Novák Fakulta stavební ČVUT katedra fyziky Thákurova 7 66 9 Praha 6 V technické praxi se často vyskytuje
REALIZACE AREVNÉHO KONTRASTU DEFEKTŮ V OPTICKÉ PROSTOVĚFREKVENČNÍ OLASTI SPEKTRA. Úvod Antonín Mikš Jiří Novák Fakulta stavební ČVUT katedra fyziky Thákurova 7 66 9 Praha 6 V technické praxi se často vyskytuje
Novinky ve vývoji individuálních progresivních čoček. Petr Ondřík Rodenstock ČR, s.r.o.
 Novinky ve vývoji individuálních progresivních čoček. Petr Ondřík Rodenstock ČR, s.r.o. 06 March 2013, Page 1 Trend ve vývoji individuálních progresivních čoček. Astigmatismus do blízka. Výsledky univerzitní
Novinky ve vývoji individuálních progresivních čoček. Petr Ondřík Rodenstock ČR, s.r.o. 06 March 2013, Page 1 Trend ve vývoji individuálních progresivních čoček. Astigmatismus do blízka. Výsledky univerzitní
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
PRAKTIKUM III. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Úlohač.III. Název: Mřížkový spektrometr
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úlohač.III Název: Mřížkový spektrometr Vypracoval: Petr Škoda Stud. skup.: F14 Dne: 17.4.2006 Odevzdaldne: Hodnocení:
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úlohač.III Název: Mřížkový spektrometr Vypracoval: Petr Škoda Stud. skup.: F14 Dne: 17.4.2006 Odevzdaldne: Hodnocení:
Témata semestrálních prací:
 Témata semestrálních prací: 1. Balistická raketa v gravitačním poli Země zadal Jiří Novák Popište pohyb balistické rakety vystřelené ze zemského povrchu v gravitačním poli Země. Sestavte model této situace
Témata semestrálních prací: 1. Balistická raketa v gravitačním poli Země zadal Jiří Novák Popište pohyb balistické rakety vystřelené ze zemského povrchu v gravitačním poli Země. Sestavte model této situace
Měření a analýza parametrů rohovky
 Měření a analýza parametrů rohovky František Pluháček Katedra optiky PřF UP v Olomouci 1 Obsah 1. Modely tvaru rohovky 2. Základní popisné charakteristiky 3. Keratometrie 4. Keratografie 5. Příklady vyšetření
Měření a analýza parametrů rohovky František Pluháček Katedra optiky PřF UP v Olomouci 1 Obsah 1. Modely tvaru rohovky 2. Základní popisné charakteristiky 3. Keratometrie 4. Keratografie 5. Příklady vyšetření
Návrh rozsahu přejímacích zkoušek a zkoušek dlouhodobé stability. skiagrafických radiodiagnostických rtg zařízení s digitalizací obrazu.
 Návrh rozsahu přejímacích zkoušek a zkoušek dlouhodobé stability skiagrafických radiodiagnostických rtg zařízení s digitalizací obrazu. 2007 Objednatel: Zhotovitel: Státní úřad pro jadernou bezpečnost
Návrh rozsahu přejímacích zkoušek a zkoušek dlouhodobé stability skiagrafických radiodiagnostických rtg zařízení s digitalizací obrazu. 2007 Objednatel: Zhotovitel: Státní úřad pro jadernou bezpečnost
Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země
 Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země strana 2 Co je DPZ Dálkový průzkum je umění rozdělit svět na množství malých barevných čtverečků, se kterými si lze hrát na počítači a odhalovat jejich neuvěřitelný
Ing. Jiří Fejfar, Ph.D. Dálkový průzkum Země strana 2 Co je DPZ Dálkový průzkum je umění rozdělit svět na množství malých barevných čtverečků, se kterými si lze hrát na počítači a odhalovat jejich neuvěřitelný
WhyCon: Přesný, rychlý a levný lokalizační systém
 WhyCon: Přesný, rychlý a levný lokalizační systém Tomáš Krajník, Matías Nitsche, Peter Lightbody ČVUT Praha Univ. of Buenos Aires, Argentina Univ. of Lincoln, UK Apr 2018 Krajník, Nitsche http://github.com/gestom/whycon-orig
WhyCon: Přesný, rychlý a levný lokalizační systém Tomáš Krajník, Matías Nitsche, Peter Lightbody ČVUT Praha Univ. of Buenos Aires, Argentina Univ. of Lincoln, UK Apr 2018 Krajník, Nitsche http://github.com/gestom/whycon-orig
Typy světelných mikroskopů
 Typy světelných mikroskopů Johann a Zacharias Jansenové (16. stol.) Systém dvou čoček délka 1,2 m 17. stol. Typy světelných mikroskopů Jednočočkový mikroskop 17. stol. Typy světelných mikroskopů Italský
Typy světelných mikroskopů Johann a Zacharias Jansenové (16. stol.) Systém dvou čoček délka 1,2 m 17. stol. Typy světelných mikroskopů Jednočočkový mikroskop 17. stol. Typy světelných mikroskopů Italský
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
Historické brýle. 1690: brýle Norimberského stylu se zelenými čočkami. 1780: stříbrné brýle. konec 18. století: mosazné obruby, kruhové čočky
 BRÝLOVÉ ČOČKY Historické brýle 1690: brýle Norimberského stylu se zelenými čočkami 1780: stříbrné brýle středověký čtecí kámen konec 18. století: mosazné obruby, kruhové čočky Bikonvexní a bikonkávní čočky
BRÝLOVÉ ČOČKY Historické brýle 1690: brýle Norimberského stylu se zelenými čočkami 1780: stříbrné brýle středověký čtecí kámen konec 18. století: mosazné obruby, kruhové čočky Bikonvexní a bikonkávní čočky
Fotogammetrie. Zpracoval: Jakub Šurab, sur072. Datum:
 Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
ZPRACOVÁNÍ OBRAZU přednáška 4
 ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
DZDDPZ3 Digitální zpracování obrazových dat DPZ. Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava
 DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
Testování statistických hypotéz
 Testování statistických hypotéz Na základě náhodného výběru, který je reprezentativním vzorkem základního souboru (který přesně neznáme, k němuž se ale daná statistická hypotéza váže), potřebujeme ověřit,
Testování statistických hypotéz Na základě náhodného výběru, který je reprezentativním vzorkem základního souboru (který přesně neznáme, k němuž se ale daná statistická hypotéza váže), potřebujeme ověřit,
Optimalizace zobrazovacího procesu digitální mamografie a změny zkoušek provozní stálosti. Antonín Koutský
 Optimalizace zobrazovacího procesu digitální mamografie a změny zkoušek provozní stálosti Antonín Koutský Mamografická rtg zařízení záznam obrazu na film digitální záznam obrazu nepřímá digitalizace (CR)
Optimalizace zobrazovacího procesu digitální mamografie a změny zkoušek provozní stálosti Antonín Koutský Mamografická rtg zařízení záznam obrazu na film digitální záznam obrazu nepřímá digitalizace (CR)
PRŮZKUMOVÁ ANALÝZA JEDNOROZMĚRNÝCH DAT Exploratory Data Analysis (EDA)
") PRŮZKUMOVÁ ANALÝZA JEDNOROZMĚRNÝCH DAT Exploratory Data Analysis (EDA) Reprezentativní náhodný výběr: 1. Prvky výběru x i jsou vzájemně nezávislé. 2. Výběr je homogenní, tj. všechna x i jsou ze stejného
PRŮZKUMOVÁ ANALÝZA JEDNOROZMĚRNÝCH DAT Exploratory Data Analysis (EDA) Reprezentativní náhodný výběr: 1. Prvky výběru x i jsou vzájemně nezávislé. 2. Výběr je homogenní, tj. všechna x i jsou ze stejného
EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU. A.Mikš 1, V.Obr 2
 EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU A.Mikš, V.Obr Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt:
EXPERIMENTÁLNÍ METODA URČENÍ ZÁKLADNÍCH PARAMETRŮ OBJEKTIVU ANALAKTICKÉHO DALEKOHLEDU A.Mikš, V.Obr Katedra fyziky, Fakulta stavební ČVUT, Praha Katedra vyšší geodézie, Fakulta stavební ČVUT, Praha Abstrakt: