SYSTÉM PRO IDENTIFIKACI OSOB DLE SNÍMKU OBLIČEJE
|
|
|
- Romana Švecová
- před 6 lety
- Počet zobrazení:
Transkript


1 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF CONTROL AND INSTRUMENTATION SYSTÉM PRO IDENTIFIKACI OSOB DLE SNÍMKU OBLIČEJE FACE DETECTION SYSTEM BAKALÁŘSKÁ PRÁCE BACHELOR'S THESIS AUTOR PRÁCE AUTHOR VEDOUCÍ PRÁCE SUPERVISOR MIROSLAV KARÁSEK Ing. PETR PETYOVSKÝ BRNO 2010
2
3 Abstrakt Tato práce pojednává o metodách počítačového vidění pro lokalizace tváře v obraze, segmentaci jednotlivých částí tváře a jejich porovnání s tváří na referenčním snímku. V práci je uveden stručný přehled biometrických metod použitelných k identifikaci osob. Obsahuje popis různých metod lokalizace tváře v obraze a jejích rysů. Také se zabývá úpravami digitálního obrazu, návrhem vlastní metody lokalizace a verifikace tváří a následnou implementaci těchto metod. Klíčová slova Biometrie, identifikace, zpracování obrazu, detekce tváře, detekce obličejových rysů, Haarovy příznaky, opencv, barevné prostory, histogram. Abstract This work deals with methods of computer vision for localization faces in an image segmentation of individual parts of face and its comparison with the face in the reference frame. The paper gives a brief overview of biometric methods useful to identify people. It describes the various methods of locating faces in images and their features. It also deals with the editing of digital images, with the design of my own methods of localization and verification of faces and the subsequent implementation of these methods. Keywords Biometrics, identification, image processing, detection of human face, detection of face features, Haar-like features, opencv, colour space, histogram.
4 Bibliografická citace KARÁSEK, M. Systém pro identifikaci osob dle snímku obličeje. Brno: Vysoké učení technické v Brně,, s. Vedoucí bakalářské práce Ing. Petr Petyovský.
5 Prohlášení Prohlašuji, že svou bakalářskou práci na téma Systém pro identifikaci osob dle snímku obličeje jsem vypracoval samostatně pod vedením vedoucího bakalářské práce a s použitím odborné literatury a dalších informačních zdrojů, které jsou všechny citovány v práci a uvedeny v seznamu literatury na konci práce. Jako autor uvedené bakalářské práce dále prohlašuji, že v souvislosti s vytvořením této bakalářské práce jsem neporušil autorská práva třetích osob, zejména jsem nezasáhl nedovoleným způsobem do cizích autorských práv osobnostních a jsem si plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení 152 trestního zákona č. 140/1961 Sb. V Brně dne: 31. května 2010 podpis autora Poděkování Děkuji vedoucímu bakalářské práce Ing. Petru Petyovskému. za účinnou metodickou, pedagogickou a odbornou pomoc a další cenné rady při zpracování mé bakalářské práce. V Brně dne: 1. června 2009 podpis autora
6 6 OBSAH 1. ÚVOD TEORETICKÝ ÚVOD Základy biometrie Daktyloskopie Geometrie ruky Úvod do identifikace dle obličeje Oční sítnice Dynamika stisku klávesnice Chůze Barevné prostory Prostor RGB Prostory CMY CMYK Převod mezi RGB a CMY Prostor HSV Prostor HLS Převod z prostoru RGB do prostoru HLS Prostor YC B C R Převod mezi prostory RGB a YC B C R Histogram Změny histogramu Ekvalizace histogramu Úpravy obrazu Matematická morfologie Binární dilatace Eroze Otevření a uzavření Konvoluce Transformace obrazu Translace Rotace... 31
7 Změna měřítka Metody detekce a lokalizace obličeje Statisticky orientované metody Metoda pod-prostoru Znalostní metody Metody založené na rozložení odstínů šedi Metody založené na rozpoznávání obličejových obrysů Metody založené na informaci o barvách Metody založené na symetrii REALIZOVANÉ ŘEŠENÍ Požadavky na snímky pro správné rozpoznání Pozice pozorovatele vůči identifikované osobě Osvětlení scény Požadavky na rozlišení Pořizování snímků Popis vlastní metody detekce obličeje Detekce barvy pokožky v obraze Lokalizace obličeje ve scéně Lokalizace obličejových rysů Haarovy příznaky Popis použité metody pro lokalizaci obličejových rysů Verifikace tváří ZHODNOCENÍ ZÁVĚR LITERATURA... 51
8 8 SEZNAM OBRÁZKŮ Obr. 2.1 Silueta dlaně Obr. 2.2 Geometrická reprezentace prostorů a) RGB a b) CMY [2] Obr. 2.3 Geometrická reprezentace prostoru HSV [2] Obr. 2.4 Geometrická reprezentace prostoru HLS [2] Obr. 2.5 Příklad histogramu obrazu světlého (vlevo) a tmavého obrazu (vpravo) Obr. 2.6 Příklad histogramu obrazu s nízkým kontrastem Obr. 2.7 Ztmavení, zesvětlení, vyšší a nižší kontrast pomocí křivek. Vstupní intenzita je na ose x, výstupní na ose y a korekční křivka je definována několika řídícími body [2] Obr. 2.8 Algoritmus hledání mapovací funkce pro ekvalizaci histogramu [2] Obr. 2.9 Příklad bodové množiny [3] Obr Typické strukturální elementy [3] Obr Dilatace [3] Obr Eroze [3] Obr. 3.1 Souřadnicový systém, z něhož jsou odečítány úhly natočení hlavy [5] Obr. 3.2 Konfigurace scény pro pořizování snímků tváře Obr. 3.3 Barevný model v prostoru RGB Obr. 3.4 Vzorky barvy pokožky v prostoru HLS Obr. 3.5 Proces lokalizace tváře Obr. 3.6 Vývojový diagram detekce lidské tváře Obr. 3.7 Příklady příznakových oken [6] Obr. 3.8 Ukázky použití příznakových oken [7] Obr. 3.9 Přepočet bodu D, se souřadnicemi x,y, do integrálního tvaru (vlevo), výpočet součtu intenzit v obdélníku ABDC (vpravo) [8] Obr Tvary použitých příznakových oken a označení jednotlivých prvků Obr Oblasti pro lokalizaci obličejových rysů a uřčené body Obr Algoritmus detekce očí nosu a úst v oblasti tváře Obr Ukázka ekvalizovaných oblastí obličeje... 47
9 9 1. ÚVOD Cílem této práce je vytvořit systém, který bude umožňovat verifikaci osob dle snímků obličeje. Pro tento účel bude nejdříve nutné provést detekci obličeje v obraze a lokalizovat v něm oči, nos a ústa. Aby bylo možné provádět srovnávání tváří, bude vytvořena databáze snímků obličejů osob, kde je každá osoba zachycena na několika snímcích. V práci bude popsána problematika detekce tváře v obrace a její následná verifikace. Bude uvedeno několik možností jak detekovat tvář. Také se bude zabývat jinými možnostmi identifikace osob. Rozmáhající se výzkum a rozvoj biometrické metody identifikace osoby pomocí její tváře je dnes využíván z mnoha praktických důvodů, jejichž význam neobyčejně vzrostl po leteckém teroristickém útoku 11. září 2001 v USA. Práce se skládá z několika částí. První z nich se věnuje základům biometrie a jednotlivým biometrickým metodám. Druhá část je věnována barevný prostorům, jejich použití a převody mezi jednotlivými barevnými prostory. Třetí se zabývá úpravami obrazu. Další část rozebírá požadavky na snímky, aby bylo možné provést detekci tváře a následnou identifikaci. Následující část je věnována samotným metodám detekce tváře, jsou prezentovány jednotlivé způsoby, jejich výhody a nevýhody. Poslední část se věnuje lokalizaci obličejových rysů a porovnání získaných tváří. Dále se bude práce zabývat zhodnocením výsledků aplikací detekčních a srovnávacích algoritmů na vytvořenou databázi snímků.
10 10 2. TEORETICKÝ ÚVOD Tato kapitola se bude zabývat teoretickým rozborem různých metod identifikace osob. Budou v ní vysvětleny a popsány barevné prostory. Dále bude popsán histogram, možnosti jeho změn a ekvalizace. Dalším tématem budou úpravy obrazu a nakonec bude uveden přehled metod pro detekci a lokalizaci obličeje v obraze. 2.1 ZÁKLADY BIOMETRIE Identita osoby se prokazuje pomocí vlastnictví (doklady, karty, čipy ), znalostí (hesla, identifikační čísla a kódy ) a podle měřitelných biologických (biometrických) charakteristik (fyzický vzhled, tvar a rozměry těla a končetin, oči, obličej, hlas, otisky prstů, struktura DNA ) Svoji identitu tedy prokazujeme tím: co máme a vlastníme (vlastnictví) co známe a umíme (znalosti) čím ve skutečnosti fyzicky a duševně jsme. To, co máme, nám může být odcizeno nebo napodobeno; to, co známe, umíme, může být odpozorováno, uhodnuto, odvozeno nebo jinak získáno. Aby případné riziko zneužití bylo minimální, v praxi se často kombinuje vlastnictví se znalostmi. Je dokázáno, že naše fyzické charakteristiky jsou jedinečné, tudíž je lze úspěšně použít pro efektivní identifikaci osoby s velmi vysokým stupněm jedinečnosti a tedy následně i prokazatelnosti a bezpečnosti. Identitu pak nelze absolutně napodobit nebo pozměnit. Nelze ji ani odcizit, protože identifikační charakteristiky jsou bezprostředně spojené s identifikovanou osobou. Biometrická identita je pro každého člověka navíc přirozená; je s ním spojena již od narození. Nyní budou vysvětleny některé pojmy, se kterými se v této práci setkáte. Identifikace je proces, ztotožnění nasnímaného biometrického vzorku se všemi referenčními šablonami uloženými v databázi (nebo seznamu apod.) vedoucí ke zjištění, která referenční šablona odpovídá šabloně vytvořené z nasnímaného
11 11 vzorku. Identifikující biometrická aplikace pak rozpozná totožnost prověřované osoby. Identifikace odpovídá na otázku: "Kdo to je?". Verifikace je proces porovnávání jediné šablony vytvořené z nasnímaného biometrického vzorku s jedinou referenční šablonou, patřící prověřované osobě. Cílem je zjistit, zda prověřená osoba je opravdu tou osobou, za kterou se vydává. Biometrická aplikace potvrzuje nebo vyvrací identitu prověřované osoby. Biometrické charakteristiky představují všechny, jakýmkoliv způsobem měřitelné údaje z biometrického vzorku. Biometrické markanty jsou takové biometrické charakteristiky, které lze efektivně využít pro verifikaci nebo identifikaci. Například v otisku nalezneme charakteristické markanty, jako jsou začátek a konec linie, křížení, očko, apod. V biometrickém vzorku je zpravidla větší množství upotřebitelných markantů, než je pro identifikaci nebo verifikaci potřebné. Biometrická šablona obsahuje naměřené hodnoty, charakteristiky, funkční závislosti, apod. minimálního počtu markantů, které plně postačují pro jednoznačnou identifikaci nebo verifikaci [5] Daktyloskopie Jedná se o jednu z nejstarších identifikačních technik. Možnost identifikace osob na základě daktyloskopických principů byla známa již starým lidským kulturám. Již staré čínské státy využívali otisků prstů při stvrzování obchodu a to několik tisíc let před naším letopočtem. Identifikace osob v oblasti daktyloskopie vychází z existence papilárních linií, které jsou vytvořeny na vnitřní straně prstů obou rukou, dlaní a prsty chodidla obou nohou. Na jiných místech těla se papilární linie nevyskytují. Papilární linie tvoří souvisle vyvýšené části pokožky dosahující výšky 0,1 až 0,4 mm a výšky 0,2 až 0,7mm. Výpočet předpokládající existenci pouhých dvaceti charakteristických znaků v kresbě papilárních linií ukáže, že je teoreticky možných asi 64 miliard variant obrazců. Tímto je dána velmi malá pravděpodobnost shody otisků prstů dvou osob. Papilární linie vznikají již ve 4. měsíci embryonálního života a zůstávají po celý život nezměněny. Papilární linie jsou téměř neodstranitelné, pokud není odstraněna i zárodečná vrstva kůže.

12 12 Vyhodnocování otisků prstů patří k nejstarší biometrické metodě, u které byla pro urychlení a zkvalitnění identifikace osob masově využita výpočetní technika po celém světě Geometrie ruky První zařízení na měření geometrie ruky bylo vyvinuto v Stanfordském výzkumném institutu v 70. letech dvacátého století. V zařízení převládaly mechanické prvky a bylo založeno na měření délek jednotlivých prstů ruky. Jednalo se tedy o tzv. jednorozměrnou geometrii. Druhá vývojová řada byla již orientována v dvourozměrném prostoru. Byla měřena délka i šířka všech prstů jedné ruky. Moderní opto-elektronické komponenty dnes umožňují 3D měření. Tato identifikační metoda je založena na faktu, že kombinace délky, šířky a tloušťky, měřené na všech pěti prstech jedné ruky, jejich tvar (obrys, kontura) a tedy rozměry, jsou jedinečné. Uživatel klade ruku na horizontální plochu skeneru, opatřenou speciálními fixačními kolíčky tak, aby při každém snímání byla poloha ruky pokud možno vždy stejná. Ruka se osvítí infračervenou LED diodou a snímání je realizováno digitální kamerou. Skener snímá pouze siluetu dlaně s prsty, viz obr. 2.1, nikoliv otisky, jizvy nebo barvy. Jeden obraz je snímán se shora kolmo na rovinu snímací desky a druhý obraz pomocí postranního zrcadla vykresluje pohled na dlaň z boku. Následně jsou naměřené rozměry uloženy do biometrické šablony o velikosti několika bytů. Tyto šablony dosahují u posledních modelů skenerů 9 bytů, což odpovídá 2 72 kombinací. Biometrická metoda geometrie ruky je uživatelsky i technologicky velice jednoduchá a rychlá. Přesnost této metody je poměrně nízká, proto ji lze použít pouze pro verifikaci nikoliv pro identifikaci. Obr. 2.1 Silueta dlaně
13 Úvod do identifikace dle obličeje Identifikace osoby na základě její tváře má ve srovnání s metodou otisků prstů nižší identifikační jednoznačnost. Metoda umožňuje bezkontaktní snímání i na poměrně velkou vzdálenost. Pro uživatele je přívětivá a akceptovatelná pro svoji přirozenost na rozdíl od ostatních biometrických metod. V operativní bezpečnostní praxi bezpečnostních složek si pozorované objekty vůbec neuvědomují předmět zájmu o svou osobu. Počítačově podporovaná identifikace osoby podle její tváře má dvě základní, klíčové etapy. V první etapě probíhá na scéně detekce a lokalizace tváře. Na scéně je nalezena tvář (detekce), a je spolehlivě rozpoznána od ostatních obrazů na scéně. S rozpoznáním, že se jedná o lidskou tvář, určujeme i její prostorové umístění. Ve druhé etapě probíhá nalezení základních identifikačních charakteristik a samotná identifikace. Jednotlivé metody detekce a identifikace dle obličeje jsou probrány v kapitole Oční sítnice Rozpoznávání osob pomocí oční sítnice je biometrická metoda, která provádí identifikaci osob na základě snímání a srovnávání obrazu vzoru sítnice. Pro získání obrazu cév oční sítnice je použita speciální optická kamera. Získaný snímek pak jedinečně identifikuje danou osobu a pomocí porovnávání těchto snímků (jejich charakteristik) je možné danou osobu verifikovat nebo i identifikovat v rámci určité databáze osob. Identifikace na základě oční sítnice je velice přesnou metodou rozpoznávání osob. Speciální kamera pro snímání vzoru sítnice je však relativně drahá. Proto tato metoda rozpoznávání osob nachází uplatnění především v oblastech vyžadující vysokou úroveň bezpečnosti Dynamika stisku klávesnice Mezi jedny z tradičních a intenzivně zkoumaných biometrických behaviorálních (vrozených) charakteristik patří, mimo jiné, také dynamika stisku kláves. Nejčastěji je tato metoda spojována zejména s počítačovými klávesnicemi,
14 14 kde pomocí speciálního softwaru dochází k automatické a bezprostřední verifikaci uživatele. Jako kteroukoliv jinou behaviorální charakteristiku, také dynamiku stisku kláves do určité míry ovlivňuje aktuální fyzický a psychický stav verifikované osoby. V takovém případě, však metoda neinklinuje natolik k chybám jako například při ověřování hlasu mluvčího či dynamiky podpisu. Během měření dynamiky stisku kláves může být pozornost soustředěna na několik charakteristických rysů uživatelova psaného projevu. Většina z nich vychází z analýzy okamžiku stlačení klávesy od počátku měření a doby trvání jejího stisku. Dynamika stisku kláves poskytuje unikátní biometriku především ve spojení s autentizací počítačových uživatelů. Díky své jednoduchosti a hardwarové nenáročnosti v porovnání s většinou ostatních biometrických technologií závisí její úspěch čistě na softwarové implementaci. Mezi nevýhody této metody patří nutnost psát na klávesnici stejným nebo alespoň velice podobným způsobem. Další problém nastává v případě osob méně zkušených v psaní na klávesnici (např. píšící dvěma prsty), kdy je možné jejich psaný projev snadno napodobit Chůze Rozpoznávání člověka na základě jeho chůze (bipolární lokomoce) je jednou z nově vznikajících oblastí biometrických aplikací. Výhodou rozpoznávání založeném na chůzi je bezkontaktnost této metody ve srovnání s většinou ostatních biometrických metod. Mnoho biometrických aplikací v určitých podmínkách nelze nasadit nebo efektivně využít. Tak například, záměrné skrývání identifikačních rysů, nedostatečné světelné podmínky či rozlišení snímaného obrazu neumožňují další zpracování získaných dat.
15 BAREVNÉ PROSTORY Barevný prostor je daná množina barev, ve které existuje systém souřadnic, který umožňuje odkazovat se na jednotlivé barvy pomocí číselných hodnot. Obraz v digitální podobě je dvojrozměrné pole bodů pixelů, z nichž každý má nějakou barvu. Barva je zaznamenána v číselné podobě pomocí hodnot souřadnic této barvy v daném barevném prostoru Prostor RGB V barevném prostoru RGB jsou barvy tvořeny kombinací tří barev spektra červenou (Red), zelenou (Green) a modrou (Blue). Barvy je možné vyjádřit trojicí (barevným vektorem), nabývající hodnot z intervalu <0,1>. Bývají uváděny v celočíselných hodnotách 0 255, což odpovídá kódování každé ze složek RGB v jednom bytu. Nulová hodnota složky znamená, že složka není zastoupena, naopak hodnota 255 indikuje její maximální intenzitu. Tento barevný prostor je nejvíce využíván zobrazovacími zařízeními. Barevný prostor RGB využívá aditivního skládání barev. Aditivní skládání barev je takové skládání, kdy se jednotlivé barevné složky sčítají a vytvářejí světlo s vyšší intenzitou. Složením červené, modré a zelené složky s maximální intenzitou získáme bílou barvou, postupným snižováním intenzity všech tří barev získáme odstíny šedi. Pokud bychom chtěli převést barevný obraz na šedotónový, je vhodnější než použít prostý průměr ze tří složek. Lidské oko vnímá různé barvy s různou intenzitou. Pro převod obrazu do stupnice šedi se používá empirický vztah [2]: I = 0,299 R + 0,587 G + 0,114 B. (2.1) Barevný rozsah prostoru RGB je možné zobrazit jako jednotkovou krychli umístěnou v osách označených r, g, b (viz obr. 2.2). Počátek souřadnic odpovídá černé barvě, zastoupení všech složek je nulové, zatímco vrchol o souřadnici [1,1,1] odpovídá bílé barvě. Vrcholy krychle, ležící na osách, představují základní barvy a zbývající vrcholy představují doplňkové barvy.
16 Prostory CMY CMYK Prostor RGB je technicky orientovaný, je využívaný v zobrazovací technice (monitory, TV). Lidská zkušenost s mícháním barev vychází z principu, kdy se nové barvy vytvářejí mísením jednotlivých barevných pigmentů, při každém přidání pigmentu se vytvoří tmavší barva. Toto skládání barev se nazývá substraktivní. Složením všech barev vznikne černá, což je opačná situace oproti aditivnímu skládání barevného světla. Barevný prostor CMY vyhovuje především tiskařským technikám, kde se využívá tří základních barev: tyrkysové (modrozelené, Cyan), fialové (Magenta), a žluté (Yellow). Tento prostor je také možné popsat jednotkovou krychlí (viz obr. 2.2) jak tomu bylo v případě RGB. Obr. 2.2 Geometrická reprezentace prostorů a) RGB a b) CMY [2] Při tisku se vytváří barevné obrazy jako soutisk tří obrazců, tvořených základními barvami C, M a Y. Tyto základní barevné pigmenty nesmějí být dokonale krycí, protože nové barvy vznikají jejich vzájemným překrýváním. Proto při složení všech tří barev nevznikne při tisku černá, ale špinavě hnědá. Z tohoto důvodu se černá tiskne jako samostatná barva, případně může být použita pro ztmavení ostatních barev. Tímto se v polygrafii přechází od prostoru CMY k prostoru CMYK (Black). Velikost černé složky pro daný bod získáme jako minimální hodnotu ze složek C, M a Y, které poté snížíme o K.
 [2].")
17 Převod mezi RGB a CMY Převod mezi RGB a CMY je jednoduchý. Je třeba vyjádřit barevný vektor v prostoru RGB tříprvkovou maticí [r g b], jednotlivé prvky musí být v rozsahu 0 až 1, pak určíme vektor [c m y] v prostoru CMY podle rovnice (2.2) [2]. C 1 R M = 1 G (2.2) Y 1 B 2.3 PROSTOR HSV Obr. 2.3 Geometrická reprezentace prostoru HSV [2] Prostor HSV je opět definován trojicí složek, které však tentokrát nepředstavují základní barvy. Parametry prostoru HSV jsou barevný tón (Hue), sytost (Saturation) a jasová hodnota (Value). Barevný tón označuje dominantní spektrální barvu, sytost určuje příměs jiných barev a jas je dán množstvím bílého světla. Pro zobrazení tohoto prostoru se nevyužívá krychle ale šestibokého jehlanu (viz obr. 2.3), jehož vrchol leží v počátku souřadnic HSV. Souřadnice S a V se mění od 0 do 1 a souřadnice H představuje úhel a nabývá hodnot 0 až 360. Vrcholem jehlanu je černá barva. Jas roste směrem k postavě jehlanu, střed postavy představuje bílou barvu. Sytost je relativní vzdálenost od osy jehlanu, proto dominantní barvy leží na plášti jehlanu. Čisté barvy se nacházejí na obvodu podstavy. Pohybem po obvodu ve stejné vzdálenosti od vrcholu jehlanu se mění pouze barevný tón, sytost a jas zůstávají nezměněny.

18 Prostor HLS Prostor HSV vykazuje drobné nedostatky, které mohou ztěžovat práci s přesným určováním barvy. Jedním z nich je jeho jehlanovitý tvar, který způsobuje, že bod o konstantní hodnotě V a S se při změně H pohybuje po trajektorii tvaru šestiúhelníku, nikoli po kružnici, což by bylo přirozenější. V prostoru HLS (viz obr. 2.4) má tato trajektorie tvar kružnice. Obr. 2.4 Geometrická reprezentace prostoru HLS [2] Název prostoru je odvozen z pojmů barevný tón (Hue), světlost (Lightness) a sytost (Saturation). Jedná se o podobný prostor, jako byl HSV s tím rozdílem, že jehlan byl nahrazen dvojicí kuželů spojených podstavou. Barevný tón je vyjádřen úhlem, světlost nabývá hodnot 0 ve vrcholu spodního kuželu, až 1 ve vrcholu vrchního kuželu. Sytost nabývá na povrchu kuželů hodnoty 1, která se směrem dovnitř snižuje a na ose kuželů má hodnotu 0. Nejčistší barvy leží na obvodu podstav, kde je L=0,5 a S=1. Tento barevný prostor nejvíce odpovídá skutečnému lidskému vnímání barev, kdy se barvy nejsnadněji rozeznávají při průměrné světlosti, rozlišovací schopnost klesá jak při nadměrném osvětlení, tak při velkém ztmavení
19 Převod z prostoru RGB do prostoru HLS Pro převod se používá následující algoritmus: 1) Hodnoty složek R, G a B převedeme do intervalu <0;1>. 2) Nalezneme jejich minimální a maximální hodnotu. 3) Hodnotu složky L určíme ze vzorce: MaxHodnota + MinHodnota L =. (2.3) 2 4) V případě, že maximální a minimální hodnota jsou si rovny, jedná se o černobílý pixel. Z toho důvodu bude hodnota složky S=0 a H složka bude nedefinována, určíme ji jako H=0. 5) Určí se složka S, pokud je L<0,5 pak je S určeno vztahem: MaxHodnota MinHodnota S =, (2.4) MaxHodnota + MinHodnota pokud je L>0,5 tak se S spočítá dle vztahu: MaxHodnota MinHodnota S = 2 ( MaxHodnota + MinHodnota). (2.5) 6) Složka H se určí z podmínek: je-li hodnota červené složky (R) maximální G B H =, (2.6) MaxHodnota MinHodnota je-li hodnota zelené složky (G) maximální B R H = 2 +, (2.7) MaxHodnota MinHodnota je-li hodnota modré složky (B) maximální R G H = 4 +, (2.8) MaxHodnota MinHodnota 7) Hodnota složky H se nachází v intervalu <0;360>, proto je nutné získanou hodnotu vynásobit šedesáti. H = H 60 (2.9)
20 Prostor YC B C R Tohoto barevného prostoru se využívá v počítačové technice při zápisu bitmapových obrazů ve formátu JPEG. Je to uspořádání umožňující přímo využívat stejný jasový signál Y (luminanci), jak pro barevné tak i pro černobílé zobrazení. Písmeno Y v tomto prostoru označuje celkový jas dané barvy. Je možné jej spočítat dle vzorce (2.1). Dle standardu CCIR-601 nabývá Y hodnot z intervalu 0 ; 1 a chrominanční složky C B a C R 0,5;0, Převod mezi prostory RGB a YC B C R Pro tento převod je možné využít jednoduché rovnice: Y C C B R 0,299 = 0,1678 0,5 0,587 0,3313 0,4187 0,114 R 0,5 G 0,0813 B. (2.10) 2.4 HISTOGRAM Kvantifikuje množství a četnost barev obsažených v obraze. Prakticky se jedná o vektor absolutních četností hodnot zastoupených v obraze. Hodnota histogramu H pro index i udává, kolik pixelů v obraze má intenzitu i. Je-li obraz složen z jasové složky pak je histogram jednorozměrný vektor, v případě složek RGB se jedná o tři vektory. Lze ho chápat jako pravděpodobnost výskytu pixel barvy v obraze. Histogram kvantifikuje jasové poměry v obraze, ale nenese žádné informace o jejich rozložení. V blízkosti nulové hodnoty se nacházejí tmavé odstíny, se zvyšující se hodnotou ve směru osy i, roste intenzita. Na obr. 2.5 a obr. 2.6 se nacházejí příklady histogramů, první představuje světlý snímek, druhý histogram náleží snímku s převládajícími tmavými odstíny a třetí (obr. 2.6) představuje snímek s nízkým kontrastem.
 Střední část jsou střední tóny (middle tones). 3) Horní nejjasnější část histogramu se nazývá světla (lights).")
 Středotónový obraz (mid-key) má nejvíce barev, které se nacházejí ve střední části histogramu. 4) Obraz s vysokým kontrastem - kontrast je dán rozdílem mezi středními hodnotami a světly.")
21 21 Obr. 2.5 Příklad histogramu obrazu světlého (vlevo) a tmavého obrazu (vpravo) Obr. 2.6 Příklad histogramu obrazu s nízkým kontrastem Definiční obor histogram je možné rozdělit na tři části: 1) Dolní oblast je označena jako stíny (shades). 2) Střední část jsou střední tóny (middle tones). 3) Horní nejjasnější část histogramu se nazývá světla (lights). Na základě histogramu je možné obrazy dělit na čtyři základní druhy: 1) Jasný obraz (high-key) má převážnou většinu barev přítomnou ve světlech. 2) Tmavý obraz (low-key) je opakem jasného obrazu. 3) Středotónový obraz (mid-key) má nejvíce barev, které se nacházejí ve střední části histogramu. 4) Obraz s vysokým kontrastem - kontrast je dán rozdílem mezi středními hodnotami a světly. Histogram je důležitou pomůckou ve zpracování obrazu. Lze z něj vyčíst, jestli byl obraz pořízen technicky správně, tj. využívá celou škálu intenzit.
22 Změny histogramu Operace, které mají za svůj důsledek změnu histogramu, bývá zvykem označovat jako operace s histogramem. I když editační programy zobrazují tyto operace jako přímé zásahy do histogramu, ve skutečnosti se jedná o operace, jejichž výsledkem jsou změny histogramu. Nejčastěji se manipulace s barevnými složkami provádějí pomocí editačních křivek. Tyto křivky přiřazují určité vstupní hodnotě hodnotu výstupní a nejčastěji se reprezentují pomocí jednorozměrné tabulky. Z tohoto to důvodu se jim říká vyhledávací tabulka. Mapovací křivka je funkce, která vstupní úrovni jasu i přiřazuje výstupní úroveň i [2]. () i i = f (2.11) Funkce f může více hodnotám z definičního oboru přiřadit jedinou funkční hodnotu. Pokud je několik jasových složek nahrazeno jedinou, dochází k omezení jasové stupnice a tím ke zvýšení celkového počtu pixelů určité hodnoty jasu. Programy pro práci s rastrovými obrazy nabízejí širokou škálu editačních nástrojů pro přímou změnu vyhledávací tabulky. Obyčejně můžeme pracovat s jednotlivými barevnými kanály zvlášť nebo najednou, můžeme editovat jas obrazu, atp. Vyhledávací tabulku můžeme měnit tak, že specifikujeme křivku přímo, nebo ji interaktivně malujeme. Zvýšení a snížení jasu lze snadno provést aplikací funkce, jejíž graf je na obr Jediné dvě hodnoty, které zůstanou zachovány, jsou černá a bílá barva. Ostatní hodnoty jsou sníženy či zvýšeny. Obr. 2.7 Ztmavení, zesvětlení, vyšší a nižší kontrast pomocí křivek. Vstupní intenzita je na ose x, výstupní na ose y a korekční křivka je definována několika řídícími body [2].
23 23 Zvýšení nebo snížení kontrastu obrazu se provádí pomocí tzv. s-křivky resp. inverzní s-křivky. Název této křivky je odvozen z jejího tvaru. S-křivka přiřadí stínům tmavší odstíny, střední část zůstane zachována a světlům se naopak zvýší intenzita. Analogicky mění jasové intenzity křivka snižující kontrast Ekvalizace histogramu Jednou z často používaných metod změny jasu v obraze je vyrovnání, neboli ekvalizace histogramu. V podstatě jde o nalezení mapovací funkce, která rozloží hodnoty v histogramu rovnoměrně. Výsledkem by tedy měl být jasově vyrovnaný obraz. Algoritmus ekvalizace histogramu spočívá v nalezení takové mapovací funkce, jejíž aplikací dosáhneme vyrovnaného histogramu. Tato funkce je závislá na konkrétním obraze. Předpokládejme, že máme obraz v rozlišení x y bodů maximální intenzity maxi. Ideálně vyrovnaný histogram by obsahoval všechny hodnoty jasu zastoupené stejnou četností, označme ji d. Hodnota d musí být průměrem ze všech hodnot, viz vzorec (2.12) [1]. x y d = (2.12) max Základní myšlenkou algoritmu, který vytváří mapovací funkci, je že se chová jako by bylo možno hodnotu vyšší než d rozdělit. Algoritmus nejprve prozkoumá, do jakého intervalu je zapotřebí tuto hodnotu rozdělit a nerozdělenou ji potom umístí do jejího středu. Příklad výpočtu mapovací funkce vyrovnávající histogram je na obr K ekvalizaci histogramu je zapotřebí přistupovat uváženě, neboť i tato metoda má v některých případech nežádoucí efekty. Předpokládejme, že máme obrázek, který má na zcela černém pozadí tmavý šum. Ekvalizací histogramu docílíme toho, že se hodnoty šumu přesunou do jasnější oblasti a šum se tak zvýrazní.
24 24 Obr. 2.8 Algoritmus hledání mapovací funkce pro ekvalizaci histogramu [2] Někdy má smysl ekvalizovat pouze část obrazu; tato operace je označována jako lokální ekvalizace. Právě lokální ekvalizace je využito v této práci, kdy se ekvalizuje histogram oblasti tváře.
, ekvalizace histogramu, apod. 2.5.1 Matematická morfologie Matematický aparát vychází z algebry nelineárních operací.")
25 ÚPRAVY OBRAZU Před použitím snímku pro další zpracování je někdy nutné provést jeho úpravu. Důvody pro tyto úpravy mohou být například filtrace šumu, potřeba zvýraznit určité prvky (např. hrany), ekvalizace histogramu, apod Matematická morfologie Matematický aparát vychází z algebry nelineárních operací. Do značné míry při zpracování signálů nebo obrazů předstihuje tradiční lineární přístup, který využívá lineární kombinaci (konvoluci) bodových zdrojů představovaných Diracovými impulsy. Například se jedná o předzpracování obrazu, o segmentaci s důrazem na tvar hledaných objektů, o kvantitativní popis objektů. Matematická morfologie využívá vlastností bodových množin. Vychází z předpokladu, že je možné obrazy modelovat pomocí bodových množin libovolné dimenze (např. n-rozměrný euklidovský prostor). Dvourozměrný euklidovský prostor ε 2 je přirozeným definičním oborem pro popis rovinných útvarů. Pro binární matematickou morfologii je základem popisu množina dvojic celých čísel Z. Pro šedotónovou matematickou morfologii se jedná o množinu trojic Z. Binární obraz lze vyjádřit jako 2D bodovou množinu. Body objektů v obraze reprezentují množinu X, což odpovídá pixelu s hodnotou jedna. Body doplňku X C popisují pozadí a jsou vyjádřeny nulovou hodnotou pixel. Počátek je označován křížkem (viz obr. 2.11). Obr. 2.9 Příklad bodové množiny [3] Morfologická transformace Ψ je dána relací mezi obrazem (bodová množina X) s jinou, typicky menší bodovou množinou B, které se říká strukturní element.
 na obraz X si lze představit, jako bychom strukturní element B systematicky posouvali po obraze.")
26 26 Strukturní element B je vztažen k lokálnímu počátku O, kterému se říká reprezentativní bod. Některé typické strukturní elementy jsou na obr Obr Typické strukturální elementy [3] Aplikaci morfologické transformace Ψ(X) na obraz X si lze představit, jako bychom strukturní element B systematicky posouvali po obraze. Uvažujme, že B je umístěn v nějaké poloze v obraze. Výsledek relace mezi obrazem X a strukturním elementem B se zapíše do výstupního obrazu v reprezentativním pixelu. Pro binární obrazy je výsledek relace buď nula, nebo jedna. Základními transformacemi matematické morfologie jsou dilatace, eroze, otevření a uzavření. Tyto transformace budou podrobně popsány v následujících kapitolách Binární dilatace Jedná se o skládání bodů dvou množin pomocí vektorového součtu (např., +, = +, + ). Dilatace je bodovou množinou všech možných vektorových součtů pro dvojice pixel, vždy pro jeden z množiny X a jeden z množiny B [3]: 2 { p : p = x + b, x X b B} X B = ε,. Obr ukazuje dilataci na jednoduchém příkladě. (2.13) Obr Dilatace [3]
27 27 Isotropický strukturní element je takový, že se morfologická transformace chová ve všech směrech stejně, tj. objekty expandují. Při použití strukturního elementu 3x3 (viz obr vlevo) dochází k rozrostení objektů o jednu vrstvu na úkor pozadí. Dilataci můžeme vyjádřit jako sjednocení posunutých bodových množin [3] U X B =. (2.14) b B X b Dilatace se používá samostatně k zaplnění malých děr, úzkých zálivů a jako stavební kámen složitějších operací. Dilatace zvětšuje objekty Eroze Eroze je duální operací k dilataci. Ani dilatace ani eroze nejsou invertovatelné. Eroze skládá dvě množiny podle předpisu [3]: 2 X B = { p ε : p + b X pro každé b B}. (2.15) Vztah (2.15) říká, že pro každý bod obrazu p se ověřuje, zda pro všechna možná p+b leží výsledek v X. Pokud ano, zapíše se v reprezentativním bodě do výsledného obrázku 1 a v opačném případě 0. obr ukazuje bodovou množinu X erodovanou strukturním elementem B, který není všesměrový. Obr Eroze [3] Pomocí eroze je možné nalézt obrys objektů a to tak, že se od původního obrazu odečte obraz erodovaný isotropickým strukturním elementem 3x3. Eroze se používá pro zjednodušení struktury objektů objekty tloušťky 1 se ztratí a tím se složitější objekty rozdělí na několik jednodušších.
28 28 Erozi můžeme také interpretovat jako systematické posouvání strukturního elementu B po obrazu X. Když je B posunutý o vektor p obsažen v obrazu X, potom bod odpovídající reprezentativnímu bodu B patří do eroze X B. Implementace eroze se může zjednodušit, tím že erozi obrazu X strukturním elementem B můžeme vyjádřit jako průnik všech posunů obrazu X o vektory, viz rovnice (2.16) [3]. I X B = X b (2.16) b B Pokud je reprezentativní bod prvkem strukturního elementu, potom je eroze antiextenzivní transformací, tj. když 0,0 potom Otevření a uzavření Jedná se o morfologickou transformaci vzniklou kombinací eroze a dilatace. Výsledkem jak otevření tak uzavření je obraz, který obsahuje méně detailů. Eroze následovaná dilatací vytváří novou transformaci zvanou otevření. Rovnice (2.17) představuje otevření množiny X strukturním elementem B [3]. ( X B) B X o B = (2.17) Dilatace následovaná erozí je uzavřením. Uzavření množiny X strukturním elementem B se označuje a je definováno dle rovnice [3]: ( X B) B XB = (2.18) Pokud po otevření strukturním elementem B zůstává obraz X stejný, říkáme, že je obraz otevřený vzhledem k B. Podobně, pokud se obraz X po uzavření strukturním elementem B nezmění, říkáme, že je uzavřený vzhledem k B. Otevření a uzavření izotopickým strukturním elementem se používá pro odstranění detailů v obraze, které jsou menší než strukturní element. Celkový tvar objektu se tak neporuší. Otevření oddělí objekty spojené úzkou šíjí a také zjednoduší strukturu objektů. Uzavření spojí objekty, které jsou blízko u sebe, zaplní malé díry a vyhladí obrys tím, že zaplní úzké zálivy.
29 Konvoluce Dalším pojmem je konvoluce, kterou budeme označovat operátorem *. Konvoluce dvou funkcí I ( x) a ( x) I ( x) h( x) = I( x α ) h( α ) dα h je definována vzorcem (2.19) [2]. * (2.19) Funkci h ( x) se říká konvoluční jádro. Konvoluční jádro můžeme přirovnat k oknu, které se posouvá po obraze. Hodnoty konvolučního jádra určují způsob výpočtu nového pixelu v obraze. Je-li Fourierovým obrazem funkce I ( x) funkce F ( u) a obrazem h ( x) funkce H ( u), pak je obrazem funkce I ( x) * h( x) součin F ( u) H( u) a naopak obrazem F ( u) * H( u) je součin ( x) h( x) I. Zobecnění spojité konvoluce do dvou rozměrů je snadné. Při práci s digitálním obrazem se však používá diskrétní konvoluce, které je diskrétní dvourozměrnou podobou integrálu (2.19) [2]. k k I i, j = Ii, j * hi, j = I( i x),( j y ) hi, j x= k y= k ' (2.20) Konvoluční jádro diskrétní konvoluce lze popsat jako tabulku o rozměrech k, k k, k. Význam konvoluce je následující. Máme vstupní obraz I i,j a konvoluční jádro h i,j. Výstupní obraz získáme tak, že na každý bod I i, j = I i, j * hi, j funkce I i,j položíme konvoluční jádro h i,j a vypočítáme součet (2.20). Tento postup je základem mnoha operací s diskrétním obrazem, například odstraňování šumu, detekce hran, aj. Rovnice (2.21) je příklad konvolučního jádra určeného k odstraňování šumu prostým průměrováním. Příklad konvolučního jádra určeného k detekci hran je rovnice (2.22) [2] h = (2.21)
30 h = (2.22) Transformace obrazu Geometrické transformace jsou jedny z nejpoužívanějších operací v počítačové grafice. Příkladem geometrických transformací je otočení, posun, změna měřítka, zkosení a operace vzniklé jejich skládáním. Dále se pracuje s transformací bodu P, který má souřadnice [X,Y]. Transformací bodu P získáváme bod P se souřadnicemi [X,Y ]. Transformací objektu rozumíme transformaci všech bodů, ze kterých se objekt skládá. Pro zjednodušení výpočtů transformací se používá reprezentace bodů pomocí homogenních souřadnic. Homogenní souřadnice umožňují vyjádření nejčastěji používaných lineárních transformací pomocí jediné matice, což v nehomogenních kartézských souřadnicích není možné. Uspořádaná trojice čísel [x,y,w] představuje homogenní souřadnice bodu P s kartézskými souřadnicemi [X,Y] platí-li [2]: x y X =, Y =. (2.23) w w Bod P je svými homogenními souřadnicemi určen jednoznačně. Souřadnice w je nazývána váhou bodu, často se volí w=1. Homogenní souřadnice transformovaného bodu P s kartézskými souřadnicemi [X,Y ] budeme označovat [x,y,w ]. Matice reprezentující transformaci bodu P=[x,y,w] na bod P =[x,y,w ] ve dvou rozměrech je označováno A. Matice A, je ve speciálních případech označována např. T (pro translaci), R (pro rotaci). Převod souřadnic je vyjádřen vztahem (2.24) [2]. x a11 a12 a13 x P = = = y A3 3 P a21 a22 a23 y (2.24) w a a a w
31 Translace Transformace translace (posunutí) bodu P je určena vektorem posunutí ( ) p = X t, Y t. Matice transformace posunutí T má tvar [2] 1 0 X t T ( X, ) 0 1 t Yt = Yt. (2.25) Rotace Rotací bodu P kolem počátku soustavy souřadnic O=[0,0] o úhel α získáme bod P. Matice transformace otáčení R má tvar [2]: cosα sinα 0 R ( α ) = sin cos 0 α α. (2.26) Změna měřítka Změna měřítka (scale) ovlivňuje současně polohu i velikost transformovaného objektu ve směru souřadnicových os. Pokud je absolutní hodnota koeficientu změny měřítka v intervalu (0,1), dochází ke zmenšení a přiblížení transformovaného objektu k počátku souřadnic. Je-li absolutní hodnota koeficientu větší než jedna, dojde k prodloužení, je-li znaménko koeficientu záporné, dochází k prodloužení či zmenšení v opačném směru. Transformační matice je [2]: S x 0 0 S ( S, ) 0 0 x S y = S y. (2.27) METODY DETEKCE A LOKALIZACE OBLIČEJE Existuje velké množství nejrůznějších metod a algoritmů detekce obličeje. Tyto metody se dají rozdělit do dvou skupin: statisticky orientované metody, znalostní metody.
32 Statisticky orientované metody Metoda pod-prostoru Cílem této metody je nalézt v obrazu tváře obecné a přitom markantní charakteristiky typické pro lidskou tvář (např. oči, nos, ústa). Jestliže jsou tyto charakteristiky v obraze nalezeny, je možné konstatovat, že zkoumaný obraz je obraz tváře. V praxi se používá normalizovaný obraz tváře. Normalizace obrazu znamená změnu měřítka obrazu, nalezení a nastavení speciálních bodů (např. očí) určujících prostorovou orientaci tváře a rotaci celého obrazu tváře Znalostní metody Metody založené na rozložení odstínů šedi I přesto, že existují velké rozdíly mezi vzhledem tváří jednotlivých osob, lze stanovit určitá obecná pravidla distribuce odstínů šedé barvy v obraze za normálních světelných podmínek. Tak například oblast očí je vždy tmavší než například čelo. Tato metoda je často kombinována s jinými metodami. Jednou metodou z této skupiny je metoda mozaiky. Tato metoda je dostatečně efektivní i tehdy, když oblast obličeje na scéně je malá nebo nevýrazná. Metoda vychází z přirozeného způsobu rozpoznávání tváře lidským mozkem. Metoda mozaiky dělí zpracovávanou oblast do obrazových bloků. V těchto blocích pak leží oči, ústa, nos a podobně. Postupně vybíráme jednotlivé obrazové bloky a zkoumáme, zda se v nich nalézají hledané markanty. Bloky, které nesplňují tato pravidla, vyřazujeme z dalšího zpracování. Bloky, které zůstanou, jsou dále děleny a pomocí hranových detektorů jsou definitivně vyhledávány identifikační markanty.
33 Metody založené na rozpoznávání obličejových obrysů Obrys je další důležitou charakteristikou tváře. Jestliže se nám podaří korektně a přesně definovat obrys tváře, pak další detekce tváře je podstatně jednodušší. Často si však nemůžeme být zcela jisti, že jsme korektně detekovali hrany tváře, protože algoritmy na detekci hran mají svá omezení. Detekce kontur lze využít k nalezení jednotlivých objektů v tváři, využitelné pro následnou identifikaci osoby [5] Metody založené na informaci o barvách I když lidé mají barvu kůže různou, lze definovat určité zásady, které odlišují obličej od barevně diferenciovaného prostředí. Toto je základní myšlenka detekce a lokalizace lidského obličeje na scéně. Rozložení barev v obličeji lidí téže rasy je velice podobné a lze zde proto obecně najít typické oblasti s určitou barvou. Pro oblast očních důlků je například typická barva stínů, zatímco nos je jinak barevně výrazný, ohraničený stíny apod. Pomocí barev tedy lze efektivně detekovat tvář na scéně. Při dobrých světelných podmínkách lze barvy dobře rozeznávat pomocí poměrně jednoduchých algoritmů. Problémy vznikají při velice jasném nebo naopak temném osvětlení a při různých úhlech dopadajícího světla na tvář Metody založené na symetrii Lidská tvář je do určité míry symetrická. Této skutečnosti lze využít k detekci tváře na scéně. Detekce v tomto případě znamená nalezení symetrického obrazce odpovídajícího charakteristikám lidské tváře. Na scéně jsou postupně zkoumány kruhové oblasti a rozhoduje se, zda jsou totožné se symetrickou tváří. Jiná metoda, metoda zobecněné symetrické transformace, lokálně detekuje symetrické body, aby byly určeny části obličeje.

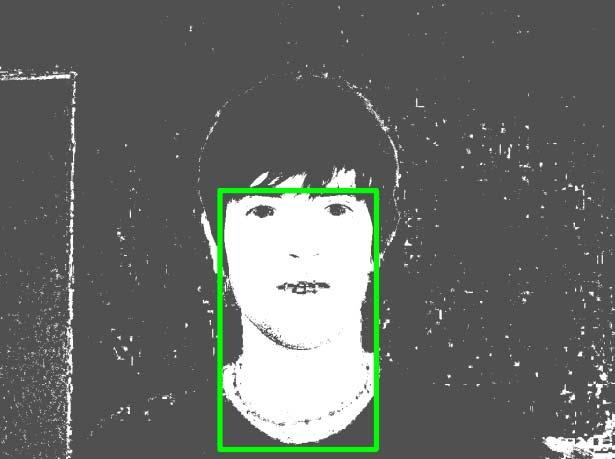
34 34 3. REALIZOVANÉ ŘEŠENÍ V této kapitole budou popsány požadavky na snímky obličejů, podrobně budou popsány metody, použité při detekci tváře ve snímku a postup ověřování identity osoby zachycené na snímku. 3.1 POŽADAVKY NA SNÍMKY PRO SPRÁVNÉ ROZPOZNÁNÍ Pro získání snímku obličeje vhodného pro detekci a identifikaci je nutné dodržet několik požadavků. Jedná se o pozici obličeje, o osvětlení scény a o velikost obličeje na snímku. Tyto požadavky jsou popsány v následujících kapitolách Pozice pozorovatele vůči identifikované osobě K úspěšné identifikaci obličeje je nutné, aby na snímcích byly patrné oči a ústa. Jedná se tedy o polohu en face. Proto jsou při detekci tváře, které tomuto nedopovídají, vyřazeny. K rotaci obličeje by nemělo docházet vpravo ani vlevo (úhel α), také pohyb dolů či vzhůru není vhodný (úhel γ). Při těchto pohybech dochází k deformaci vzdáleností mezi markantními body (např. koutky očí, špička nosu, kořen nosu apod.). Možný pohyb obličeje je pouze změnou úhlu β, kdy zůstávají vzdálenosti bodů nezměněny. Obr. 3.1 Souřadnicový systém, z něhož jsou odečítány úhly natočení hlavy [5]
35 35 Při pořizování fotografií bychom měli věnovat pozornost také pozadí. V ideálním případě by mělo být pokud možno co nejjednodušší a barevně odlišné od barvy kůže. Vhodná barva pozadí by například byla černá Osvětlení scény Scéna by měla být osvětlena tak, že zdroj světla je umístěn za pozorovatelem, aby na obličeji identifikované osoby nevznikaly stíny, viz obr Osvětlení nesmí být příliš ostré nebo příliš tlumené, aby nedocházelo ke ztrátě informace o barvách vlivem saturace. Další problém s detekcí obličeje způsobí barevné osvětlení. Obr. 3.2 Konfigurace scény pro pořizování snímků tváře Požadavky na rozlišení Pro identifikaci by bylo vhodné, aby snímky byly takové, že oblast obličeje má velikost alespoň 200x200 pixelů. Minimální hodnota je stanovena z důvodu velkého zkreslení při malých rozměrech. Příklady pořízených snímků jsou v příloze A Pořizování snímků Byla pořízena databáze snímků obličejů 20 osob. Každé osobě průměrně náleží 5 fotografií. Fotografie byly pořizovány jak v interiéru, tak v exteriéru, osoby na těchto snímcích mění výraz a natočení i polohu tváře.
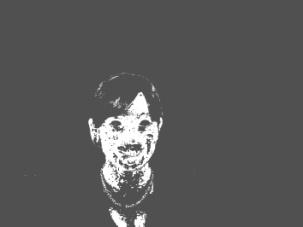
36 Popis vlastní metody detekce obličeje Pro vlastní detekci obličeje je využita metoda založená na barvách, pomocí níž jsou vyhledávány pixely odpovídající barvě lidské pokožky. Těm je přiřazena bílá barva a všem ostatním barva černá. Dostatečně velké plochy bílé barvy jsou lokalizovány a určeny k dalšímu zpracování. V nalezených oblastech jsou vyhledávány části lidské tváře (ústa a oči). V případě, že v dané oblasti budou nalezeny tyto objekty, je prohlášena za oblast tváře. Všechny ostatní oblasti jsou zapomenuty Detekce barvy pokožky v obraze Detekce pokožky byla nejdříve prováděna v barevném prostoru RGB. Pro detekci bylo nutné nasbírat vzorky barvy kůže, k čemuž posloužila vytvořená databáze snímků tváří. Hodnoty barevných složek byly zapsány do krychle, jejíž osy byly určeny jednotlivými složkami (R, G a B) v rozsahu Na fotografii byl zvolen obdélník v oblasti tváře zahrnující pouze barvy pokožky. Do krychle byly na pozice určené hodnotami složek jednotlivých pixelů zapsány hodnoty 1. V okolí každého bodu s hodnotou 1 byla navíc vytvořena koule bodů (s hodnotou 1) o poloměru 3. Ostatní pozice v této krychli měly hodnotu 0. Tato krychle je zobrazena na obr. 3.3, pro ilustraci je vykreslena i v různých průmětech. Samotná detekce barvy pokožky pak probíhala tak, že se procházel obraz pixel po pixelu a dotazovalo se, zda v krychli na pozici určené hodnotami zkoumaného pixelu je 1, nebo 0. Pokud byla hodnota 1, zkoumaný pixel byl přebarven na bílo, jinak byl přebarven na černo. Tento způsob byl náročný na paměť. Vytvořená krychle s modelem barvy kůže měla pozic. Z tohoto důvodu byl barevný prostor RGB nahrazen prostorem HLS. V prostoru HLS byla krychle převedena na dvourozměrné pole. To bylo možné, protože pro vytváření modelu barvy kůže byly vybírány pouze ty pixely, jejichž hodnota světlosti (složka L) se nacházela v rozmezí 0,1 0,9 (z důvodu saturace). Následně byl obdobně jako v předchozím případě vytvořen barevný model.
37 37 Nejdříve bylo nutné převést obraz do barevného prostoru HLS, viz kapitola 0. Následně byly vybrány na fotografii oblasti s barvou pokožky. Do dvourozměrného pole byly zapsány ty pixely, jejichž hodnota světlosti odpovídala podmínce (0,1 0,9). Při vykreslení bodů odpovídajícím barvě pokožky, viz obr. 3.4, je patrné, že se přibližně nacházejí v oblasti obdélníku, proto byl celý proces vytváření a dotazování se na body v barevném modelu nahrazen třemi podmínkami. První podmínka byla již zmíněna 0,1<L<0,9, druhá podmínka je 0<H<33 a třetí 0,1<S<1,0. Obr. 3.3 Barevný model v prostoru RGB
38 38 Obr. 3.4 Vzorky barvy pokožky v prostoru HLS Lokalizace obličeje ve scéně Lokalizace obličeje je prováděna na základě počtu bílých pixelů v řádku sloupci. Pokud množství bílých pixelů překročí v jedné ose určenou hranici, je kolmo k této ose veden pás. Průnikem pásů řádkového a sloupcového vzniká obdélník. V jednom obraze může vzniknout více obdélníků a to i takových, které neobsahují tvář, proto je ve vzniklých obdélnících ověřována přítomnost barvy pokožky. Hranice pro množství pixelů je určena z průměrného počtu bílých pixelů (jak v řádku, tak ve sloupci). Hranice jsou určeny dle vzorců (3.1) a (3.2), pokud je určená hranice nižší než 10% šířky snímku tak je nastavena na tuto hodnotu. Na obr. 3.5 jsou zobrazeny, jako vodorovná a horizontální úsečka, hranice pro osy X a Y. Křivky pak představují množství pixelů. Detekovaná tvář je pak označena zeleným obdélníkem. H = *0,8 (3.1) V P S H = *0,6 (3.2) H P Ř H V,H H -vertikální a horizontální hranice P S P Ř -průměrný počet bodů ve sloupcích -průměrný počet bodů v řádcích

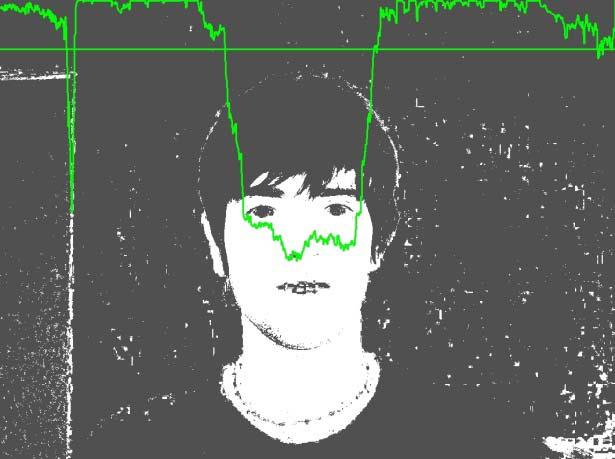
39 39 Obr. 3.5 Proces lokalizace tváře
40 40 Obr. 3.6 Vývojový diagram detekce lidské tváře 3.2 LOKALIZACE OBLIČEJOVÝCH RYSŮ V předchozích kapitolách byla popsána detekce obličeje v obraze, nyní je třeba v nalezené oblasti detekovat obličejové rysy. Nalezení těchto rysů je nutné pro další krok práce čímž je verifikace Haarovy příznaky Jednou z možností detekce obličejových rysů je pomocí Haarových příznaků. Tato metoda je založena na vzhledu. Vychází z obecných zákonitostí o rozložení intenzit v obličeji černobílého snímku. Příkladem takových zákonitostí je, že oblast čela je světlejší než oblast očí, nos je světlejší než jeho okolí apod.


![7 Příklady příznakových oken [6] Obr. 3.8 Ukázky použití příznakových oken [7] Použití této metody je možné značně urychlit použitím tzv. integrálního obrazu.](/docs-images/91/106398439/images/41-5.jpg "Integrální obraz má stejné rozměry jako zkoumaný černobílý obraz.")
41 41 Na obr. 3.7 je několik příkladů příznakových oken skládajících se z bílých a černých obdélníků. Tato okna se posouvají na snímku po oblasti, kde přepokládáme výskyt obličeje. Na každé pozici je proveden součet intenzit pixelů v oblasti bílého obdélníku a ten je následně odečten od součtu intenzit v oblasti černého obdélníku. Na základě výsledného rozdílu, součtů intenzit se rozhoduje, zda oblast v okně odpovídá hledanému rysu. Obr. 3.7 Příklady příznakových oken [6] Obr. 3.8 Ukázky použití příznakových oken [7] Použití této metody je možné značně urychlit použitím tzv. integrálního obrazu. Integrální obraz má stejné rozměry jako zkoumaný černobílý obraz. Hodnota dané pozice je vypočtena jako součet intenzit v obdélníku, který vychází z počátku a končí v daném bodě. Integrální obraz získáme aplikací vzorce (3.3) na každý bod černobílého obrazu I [6]. D ( x y) I( i, j) = x y, (3.3) i= 0 j= 0 D - zkoumaný bod x,y - souřadnice zkoumaného bodu I - černobílý obraz
, výpočet součtu intenzit v obdélníku ABDC (vpravo) [8] Výpočet sumy intenzit S obdélníku ABCD se v integrálním obraze")
![provede dle jednoduchého vzorce (3.4) [8]. S = A B C + D (3.4) 3.2.](/docs-images/91/106398439/images/42-2.jpg "2 Popis použité metody pro lokalizaci obličejových rysů V práci je implementována metoda lokalizace obličejových rysů, vycházející z metody Haarových příznaků.")

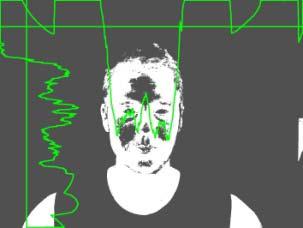
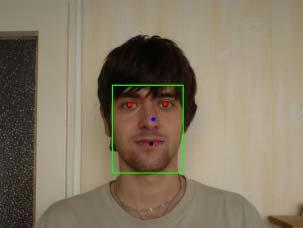
42 42 Obr. 3.9 Přepočet bodu D, se souřadnicemi x,y, do integrálního tvaru (vlevo), výpočet součtu intenzit v obdélníku ABDC (vpravo) [8] Výpočet sumy intenzit S obdélníku ABCD se v integrálním obraze provede dle jednoduchého vzorce (3.4) [8]. S = A B C + D (3.4) Popis použité metody pro lokalizaci obličejových rysů V práci je implementována metoda lokalizace obličejových rysů, vycházející z metody Haarových příznaků. Pomocí této metody jsou hledány oči, nos a ústa. Na obr jsou jednotlivé tvary příznakových oken, zleva první je použit pro detekci očí, druhý pro detekci nosu a poslední k detekci úst. Obr Tvary použitých příznakových oken a označení jednotlivých prvků Jak již bylo zmíněno, detekce očí je prováděna pomocí příznakového okna na obr vlevo. Toto okno se pohybuje po oblasti tváře, z důvodu urychlení procesu, se provede pro každý druhý pixel výpočet sum S1 až S9 dle vzorce (3.4). Následně je od sum S2 až S8 odečtena suma S1 a na základě těchto rozdílů se vyhodnotí, zda okno vyhovuje. Hodnota sumy S1 by měla být nejnižší. Velikost okna se určuje z délky tváře. Předpokládá se určitá nepřesnost detekce tváře, proto se velikost
43 43 zkoumaného okna se mění v rozsahu 15% až 30 % délky tváře. V případě, že zkoumané okno vyhovuje podmínkám, jsou zaznamenány souřadnice středu tohoto obrazce. Tímto vznikne množina bodů, z nichž se mohou některé vyskytovat i vícekrát a je nutné vybrat bod, který nejpravděpodobněji odpovídá oku. Tento bod je určen jako takový, který má ve svém okolí nejvíce dalších bodů. Tímto okolím je kruh se středem ve zkoumaném bodě a poloměrem, který je závislý na velikosti tváře. Pro detekci nosu je z obr využito prostřední okno, které se po oblasti obličeje pohybuje obdobně jako v případě předchozího okna. Avšak pohyb tohoto okna je závislý na nalezení očí v přecházejícím kroku, protože se pohybuje v oblasti mezi nimi. Velikost okna se pohybuje od 30% do 60% vzdálenosti mezi očima. V tomto případě by měla být hodnota sumy S1 naopak nejvyšší. Opět vzniká množina vyhovujících bodů, ze kterých se vybírá jeden. Lokalizace úst se opět liší pouze tvarem příznakového okna, obr vpravo. Délka okna se mění v rozsahu 40% až 100% délky tváře. Na obr je algoritmus detekce obličejových rysů. Pro ilustraci je na obr zobrazena detekovaná tvář (ohraničena zeleným obdélníkem) a oblasti pro lokalizaci obličejových rysů. Na prvním obrázku je červeným obdélníkem zobrazena oblast pro hledání oka vlevo na snímku, červené body představují body splňující podmínku. Na obrázku snímku je ta samá situace pro druhé oko, střed oblasti určené pro vyhledávání je dána výškou prvního oka. Na třetím obrázku je prováděna lokalizace nosu v oblasti modrého obdélníku a modře jsou označeny vyhovující body. Poslední obrázek znázorňuje lokalizaci úst.

44 44 Při určitém natočení tváře docházelo k lokalizaci nosních dírek namísto očí. Toto bylo ošetřeno po lokalizaci druhého oka, kontrolou vzdálenosti mezi očima. Jeli tato vzdálenost menší než 25% šířky tváře probíhá detekce očí znova s tím, že dolní hranice oblasti pro detekci oka vlevo se posune nahoru. Obr Oblasti pro lokalizaci obličejových rysů a uřčené body
45 45 Obr Algoritmus detekce očí nosu a úst v oblasti tváře
46 VERIFIKACE TVÁŘÍ Verifikace se provádí mezi dvěma snímky, ve kterých byla lokalizována tvář a alespoň oči. Pro verifikaci byla napsána funkce, která obdrží dvě fotografie s lokalizovanou tváří a obličejovými rysy. Nejdříve se provede translace tváří, tak aby pravé oko na jedné fotografii bylo ve stejné poloze jako oko na druhé. Při této operaci dojde ke ztrátě některých obrazových dat, je však nutné ošetřit aby nedocházelo k posunu tváře za hranice obrazu. Nyní se vezme tvář s menší vzdáleností mezi očima a je zvětšena tak, aby tato délka byla u obou fotografií stejná. Poté dojde k rotaci snímků a to tak, aby pravé i levé oko bylo v jedné rovině. Tím byly získány snímky, ve kterých jsou oči na stejných souřadnicích. V případě dodržení požadavků na snímky z kapitoly 6 a stanoveného maximálního natočení tváře ±15 se nyní dá předpokládat, že tváře obou snímků jsou shodně orientovány. Porovnávání probíhá s černobílými obrazy, proto upravené snímky převedeme do stupňů šedi. Pro částečné odstranění vlivu intenzity osvětlení se provede ekvalizace histogramu a to pouze v oblasti obličeje. Oblast obličeje je definována jako elipsa se středem mezi očima, s délkou hlavní poloosy odpovídající 75% vzdálenosti mezi očima, délkou vedlejší poloosy odpovídající vzdálenosti mezi středem elipsy a úst. Pokud nejsou ústa nalezena, použije se dvojnásobek vzdálenosti očí. Shora je tato elipsa nad očima oříznuta, aby byl z porovnávání vyloučen účes. Ukázky takto upravených snímků jsou na obr Nyní jsou oblasti obličejů vzájemně porovnány. Porovnání probíhá tak, že se získá absolutní hodnota rozdílů pixelů se stejnou polohou, která je v oblasti s ekvalizovaným histogramem. Následně je z těchto hodnot vypočtena průměrná hodnota shody a pro převod do procentuální podoby se použije vzorec: 256 h P = 100, (3.5) 256 kde P-výsledná procentuální hodnota shody, h-průměrná hodnota shody.


47 47 Vlivem změny výrazu tváře, nebo vlivem zarůstání vousy, dochází ke snižování přesnosti, proto je bodům pod úrovní nosu přisuzována nižší váha než hodnotám nacházejícím se nad nosem. Obr Ukázka ekvalizovaných oblastí obličeje
48 48 4. ZHODNOCENÍ Na testovací databázi snímků byla provedena detekce tváře, očí, nosu a úst. Je nutné zdůraznit, že ne všechny snímky vyhovují podmínkám, které byly stanoveny v kapitole 3.1. Při dodržení těchto podmínek by byla úspěšnost metody značně zvýšena. Tabulka 4.1 zobrazuje úspěšnost správné detekce tváře. Počet snímků 100 [-] Úspěšnost detekce obličeje 65 [%] Úspěšnost detekce pravého oka 55 [%] Úspěšnost detekce levého oka 61 [%] Úspěšnost detekce nosu 32 [%] Úspěšnost detekce úst 40 [%] Tabulka 4.1 Úspěšnosti implementovaných algoritmů detekce K vyřazení dobře lokalizované tváře, z důvodu selhání lokalizace očí, došlo ve 14% případů. Toto procento by se dalo snížit upravením algoritmu lokalizace očí a to tak, že v případě neúspěšné lokalizace pravého oka by se stejný algoritmus uplatnil na a oko levé. Ke špatným, nebo vůbec žádným lokalizacím docházelo také vlivem malého osvětlení. Srovnávání obličejů pak probíhalo na snímcích z databáze s detekovanou tváří. Procentuální hodnota shody u tváří nepatřících stejné osobě se pohybuje v rozmezí 65% až 88%. U tváří stejné osoby se procento shody nacházelo v mezích 71% až 95%. Na základě těchto skutečností byla hranice pro rozhodnutí, zda na obou snímcích je tatáž osoba, stanovena jako 90%. Tato hranice byla stanovena z důvodu omezení falešně pozitivního vyhodnocení. Bylo ověřeno, že pro toto nastavení kritérií je systém schopen nalézt 20 shod tváří ve vytvořené databázi o 100 snímcích.
49 49 5. ZÁVĚR Cílem této práce bylo nastudovat, navrhnout a zrealizovat systém pro identifikaci osob dle snímku obličeje. Pro vytvoření této práce bylo nastudováno dostatečné množství informací. V prostředí Matlab bylo pomocí nástroje Image Processing Toolbox, získáno povědomí o základech práce s obrazovými daty. Pro tuto práci byla vytvořena databáze testovacích snímků tváří. Jedná se o snímky 20 osob při různém osvětlení. Některé z nich byly pořízeny v exteriéru, většina je však nasnímána v interiéru. Tváře byly snímány jak ve svislé poloze tak mírně natočené, z důvodu testování identifikačního softwaru. Snímky byly ve většině případů pořízeny fotoaparátem Panasonic DMC-LS60. Ne všechny tyto snímky byly ideální, na některých došlo ke splynutí tváře s pozadím nebo s části oděvu. V programovacím jazyce C++ byla vytvořena funkce hls_filtr, která provede v barevném prostoru HLS lokalizaci lidské tváře. K vytvoření této funkce byly použity také funkce knihovny OpenCV. Barevného prostoru HLS je využito z důvodu přirozeného vyjádření barev a jednoduchého vyjádření modelu barvy kůže. Tato funkce vyhledává pouze jednu tvář v obraze. Příloha A obsahuje několik ukázek lokalizace tváře v obraze. Pro ukázku byly vybrány pouze snímky se správnou lokalizací tváře. Úspěšnost správné lokalizace tváře je 65%. Toto číslo není příliš vysoké, protože detekce tváře je podmíněna úspěšnou lokalizací očí. Dalo by se docílit vyšší úspěšnosti úpravou algoritmu detekce očí, ale z časových důvodů již toto nebylo realizováno. V další části práce byla popsána navržená metoda pro srovnání snímků obličeje. Tato metoda spolehlivě rozezná různé tváře, ale také dochází k falešně negativním vyhodnocením. Verifikace by se dala zefektivnit tak, že by každá osoba v databázi měla několik referenčních snímků. Tyto snímky by osobu zachycovaly s různými natočeními tváře a tím by se také snížila citlivost celé metody na nevhodné natočení tváře. Hranice shody tváře, která určuje, zda se jedná o snímky totožné osoby, byla stanovena na 90%. Tato hodnota hranice shody byla stanovena na základě
50 50 vyhodnocení srovnání tváří všech osob databáze. Shoda mezi tvářemi různých osob se pohybovala v rozmezí 65% až 88% a shoda tváří u stejných osob se pohybovala v rozmezí 71% až 95%. Hranice 90-ti procentní byla tedy stanovena z důvodu zamezení falešně pozitivní verifikace. Výhodou tohoto řešení je převážně jeho jednoduchost, kdy detekce obličeje a obličejových rysů dosahují relativně vysoké rychlosti. Nevýhodou je značná závislost výsledku verifikace na vzájemné poloze snímané osoby a zdroje světla. Na tváři mohou vznikat různé stíny, které verifikaci značně znesnadňují. Další nevýhodou je závislost na změně úhlů α a γ, viz obr. 3.1, možné řešení této problematiky, by bylo pořízení více vzorů. Jiná možná metoda verifikace by byla, kdyby se ve snímku obličeje našly markanty a pro následnou identifikaci by se používaly normalizované vzdálenosti mezi těmito markanty. Tato metoda by byla značně náročná na přesnou lokalizaci těchto markantů. Jako by se mohlo pracovat na zpřesnění detekce očí, aby z tohoto důvodu nedocházelo k vyřazování tváří z procesu verifikace. Navíc by toto vylepšení verifikaci značně zpřesnilo. Také by se systém mohl upravit, aby byl schopen pracovat se snímky, na kterých je více tváří.
51 51 6. LITERATURA [1] Šonka, M.; Hlaváč, V. Počítačové vidění. Praha: Grada, s. ISBN [2] Žára, J.; Beneš, B.; Felkel, P. Moderní počítačová grafika. 1. vyd. Brno: Computer Press, s. ISBN [3] Hlaváč, V.; Sedláček, M. Zpracování signálů a obrazů. 2. přeprac. vyd. Praha: ČVUT, s. ISBN [4] Gong, S.; McKenna, S. Dynamic Vision: From Images to Face Recognition. Imperial College Press, s. ISBN [5] Rak, R.; Matyáš, V.; Říha, Z. Biometrie a identita člověka: ve forenzních a komerčníc aplikacích. 1. vyd. Praha: Grada, s. ISBN [6] HEJDUK, P. Rozpoznávání gest obličeje. Brno, s. Semestrální práce.. [7] Mita, T.; Kaneko, T.; Hori, O. Joint Haar-Like Features for Face Detection, Proc. 10th IEEE Int l Conf. Computer Vision, [8] CHESNOKOV, Y. Code Project. Ultra Rapid Object Detection in Computer Vision Applications with Haar-like Wavelet Features, URL: < [cit ].
52 SEZNAM ZKRATEK RGB - barevný prostor tvořený složkami R (červená), G (zelená) a B (modrá) CMY - barevný prostor tvořený složkami C (azurová), M (fialová) a Y (žlutá) HSV - barevný prostor tvořený složkami H (barevný tón), S (sytost) a V (jasová hodnota) HLS - barevný prostor tvořený složkami H (barevný tón), L (světlost) a S (sytost) OpenCV -Open Computer Vision Library
53 SEZNAM PŘÍLOH Příloha A Zobrazuje fotografie, na kterých je demonstrována funkčnost lokalizace tváře. Příloha B Zobrazuje snímky s lokalizovanou tváří a lokalizovanými obličejovými rysy, které jsou následně připraveny k porovnání a výslednému odečtení snímků v oblasti obličejů. Výsledný snímek je uveden pouze pro ilustraci. Dále jsou v této příloze uvedeny procentuální hodnoty shody těchto snímků. Příloha C Databáze pořízených snímků obličeje. Příloha D Zdrojové a hlavičkové soubory v jazyce C++, pro lokalizaci obličejů a obličejových rysů a pro porovnání snímků tváří. Pro vytvoření těchto algoritmů bylo využito knihovny OpenCV Library. Příloha E Funkce a m-files vytvořené v prostředí Matlab. Příloha F Ukázkový příklad fungujícího programu pro detekci a verifikaci s porovnávanými snímky.









54 Příloha A: Příklady detekce a lokalizace lidské tváře ve snímku.







55 Příloha B: Příklady verifikací tváří. Tváře Tváře po posunutí Rozdíl Algoritmem s lokalizovanými rotaci a ekvalizaci porovnávaných tváří vyhodnocená rysy histogramu úroveň shody 76% 93% 80%
Práce na počítači. Bc. Veronika Tomsová
 Práce na počítači Bc. Veronika Tomsová Barvy Barvy v počítačové grafice I. nejčastější reprezentace barev: 1-bitová informace rozlišující černou a bílou barvu 0... bílá, 1... černá 8-bitové číslo určující
Práce na počítači Bc. Veronika Tomsová Barvy Barvy v počítačové grafice I. nejčastější reprezentace barev: 1-bitová informace rozlišující černou a bílou barvu 0... bílá, 1... černá 8-bitové číslo určující
Přednáška kurzu MPOV. Barevné modely
 Přednáška kurzu MPOV Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář E512, tel. 1194, Integrovaný objekt - 1/11 - Barvy v počítačové grafice Barevné modely Aditivní modely RGB,
Přednáška kurzu MPOV Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář E512, tel. 1194, Integrovaný objekt - 1/11 - Barvy v počítačové grafice Barevné modely Aditivní modely RGB,
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Rozšíření bakalářské práce
 Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
Počítačová grafika. Studijní text. Karel Novotný
 Počítačová grafika Studijní text Karel Novotný P 1 Počítačová grafika očítačová grafika je z technického hlediska obor informatiky 1, který používá počítače k tvorbě umělých grafických objektů a dále také
Počítačová grafika Studijní text Karel Novotný P 1 Počítačová grafika očítačová grafika je z technického hlediska obor informatiky 1, který používá počítače k tvorbě umělých grafických objektů a dále také
7 Transformace 2D. 7.1 Transformace objektů obecně. Studijní cíl. Doba nutná k nastudování. Průvodce studiem
 7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
B_PPG PRINCIPY POČÍTAČOVÉ GRAFIKY
 B_PPG PRINCIPY POČÍTAČOVÉ GRAFIKY RNDr. Jana Štanclová, Ph.D. jana.stanclova@ruk.cuni.cz ZS 2/0 Z Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah seminářů 03.10.2011 [1]
B_PPG PRINCIPY POČÍTAČOVÉ GRAFIKY RNDr. Jana Štanclová, Ph.D. jana.stanclova@ruk.cuni.cz ZS 2/0 Z Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah seminářů 03.10.2011 [1]
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
13 Barvy a úpravy rastrového
 13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
Úvod do počítačové grafiky
 Úvod do počítačové grafiky elmag. záření s určitou vlnovou délkou dopadající na sítnici našeho oka vnímáme jako barvu v rámci viditelné části spektra je člověk schopen rozlišit přibližně 10 milionů barev
Úvod do počítačové grafiky elmag. záření s určitou vlnovou délkou dopadající na sítnici našeho oka vnímáme jako barvu v rámci viditelné části spektra je člověk schopen rozlišit přibližně 10 milionů barev
Světlo. Podstata světla. Elektromagnetické záření Korpuskulární charakter. Rychlost světla. Vlnová délka. Vlnění, foton. c = 1 079 252 848,8 km/h
 Světlo Světlo Podstata světla Elektromagnetické záření Korpuskulární charakter Vlnění, foton Rychlost světla c = 1 079 252 848,8 km/h Vlnová délka Elektromagnetické spektrum Rádiové vlny Mikrovlny Infračervené
Světlo Světlo Podstata světla Elektromagnetické záření Korpuskulární charakter Vlnění, foton Rychlost světla c = 1 079 252 848,8 km/h Vlnová délka Elektromagnetické spektrum Rádiové vlny Mikrovlny Infračervené
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Přednáška kurzu BZVS. Barevné modely
 Přednáška kurzu BZVS Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář SD3.152, tel. 6434, Technická 12, VUT v Brně - 1/16 - Barvy v počítačové grafice Barevné modely Aditivní
Přednáška kurzu BZVS Barevné modely Ing. P. Petyovský (email: petyovsky@feec.vutbr.cz), kancelář SD3.152, tel. 6434, Technická 12, VUT v Brně - 1/16 - Barvy v počítačové grafice Barevné modely Aditivní
VOLBA BAREVNÝCH SEPARACÍ
 VOLBA BAREVNÝCH SEPARACÍ SOURAL Ivo Fakulta chemická, Ústav fyzikální a spotřební chemie Vysoké učení technické v Brně, Purkyňova 118, 612 00 Brno E-mail : Pavouk.P@centrum.cz K tomu aby byly pochopitelné
VOLBA BAREVNÝCH SEPARACÍ SOURAL Ivo Fakulta chemická, Ústav fyzikální a spotřební chemie Vysoké učení technické v Brně, Purkyňova 118, 612 00 Brno E-mail : Pavouk.P@centrum.cz K tomu aby byly pochopitelné
Kde se používá počítačová grafika
 POČÍTAČOVÁ GRAFIKA Kde se používá počítačová grafika Tiskoviny Reklama Média, televize, film Multimédia Internetové stránky 3D grafika Virtuální realita CAD / CAM projektování Hry Základní pojmy Rastrová
POČÍTAČOVÁ GRAFIKA Kde se používá počítačová grafika Tiskoviny Reklama Média, televize, film Multimédia Internetové stránky 3D grafika Virtuální realita CAD / CAM projektování Hry Základní pojmy Rastrová
Digitální fotografie. Mgr. Milana Soukupová Gymnázium Česká Třebová
 Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527
 Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
Projekt: Příjemce: Digitální učební materiály ve škole, registrační číslo projektu CZ.1.07/1.5.00/34.0527 Střední zdravotnická škola a Vyšší odborná škola zdravotnická, Husova 3, 371 60 České Budějovice
11 Zobrazování objektů 3D grafiky
 11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
11 Zobrazování objektů 3D grafiky Studijní cíl Tento blok je věnován základním algoritmům zobrazení 3D grafiky. Postupně budou probrány základní metody projekce kolmé promítání, rovnoběžné promítání a
Počítače a grafika. Ing. Radek Poliščuk, Ph.D. Přednáška č.7. z předmětu
 Ústav automatizace a informatiky Fakulta strojního inženýrství Vysoké učení technické v Brně Přednáška č.7. z předmětu Počítače a grafika Ing. Radek Poliščuk, Ph.D. 1/14 Obsahy přednášek Přednáška 7 Zpracování
Ústav automatizace a informatiky Fakulta strojního inženýrství Vysoké učení technické v Brně Přednáška č.7. z předmětu Počítače a grafika Ing. Radek Poliščuk, Ph.D. 1/14 Obsahy přednášek Přednáška 7 Zpracování
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe
 ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe TEORIE Morfologické operace v obraze Zdroje (7.. 0): Wikipedia EN: http://en.wikipedia.org/wiki/mathematical_morphology CMP: http://cmp.felk.cvut.cz/~hlavac/
ROZ I. CVIČENÍ V. Morfologické operace v obraze teorie & praxe TEORIE Morfologické operace v obraze Zdroje (7.. 0): Wikipedia EN: http://en.wikipedia.org/wiki/mathematical_morphology CMP: http://cmp.felk.cvut.cz/~hlavac/
Barvy. Radek Fiala. Podpořeno z projektu FRVŠ 584/2011
 fialar@kma.zcu.cz Podpořeno z projektu FRVŠ 584/2011 Kde se berou barvy? Co je barva Světlo jako elmg. záření nemá barvu. Jednou z vlastností světla je tzv. spektrální rozdělení (Spectral Power Distribution,
fialar@kma.zcu.cz Podpořeno z projektu FRVŠ 584/2011 Kde se berou barvy? Co je barva Světlo jako elmg. záření nemá barvu. Jednou z vlastností světla je tzv. spektrální rozdělení (Spectral Power Distribution,
Barvy a barevné modely. Počítačová grafika
 Barvy a barevné modely Počítačová grafika Barvy Barva základní atribut pro definici obrazu u každého bodu, křivky či výplně se definuje barva v rastrové i vektorové grafice všechny barvy, se kterými počítač
Barvy a barevné modely Počítačová grafika Barvy Barva základní atribut pro definici obrazu u každého bodu, křivky či výplně se definuje barva v rastrové i vektorové grafice všechny barvy, se kterými počítač
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
Skládání různoběžných kmitů. Skládání kolmých kmitů. 1) harmonické kmity stejné frekvence :
 harmonické kmity stejné frekvence :") Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Informační a komunikační technologie. Základy informatiky. 5 vyučovacích hodin. Osobní počítače, soubory s fotografiemi
 Výstupový indikátor 06.43.19 Název Autor: Vzdělávací oblast: Vzdělávací obory: Ročník: Časový rozsah: Pomůcky: Projekt Integrovaný vzdělávací systém města Jáchymov - Mosty Digitální fotografie Petr Hepner,
Výstupový indikátor 06.43.19 Název Autor: Vzdělávací oblast: Vzdělávací obory: Ročník: Časový rozsah: Pomůcky: Projekt Integrovaný vzdělávací systém města Jáchymov - Mosty Digitální fotografie Petr Hepner,
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
9 Prostorová grafika a modelování těles
 9 Prostorová grafika a modelování těles Studijní cíl Tento blok je věnován základům 3D grafiky. Jedná se především o vysvětlení principů vytváření modelů 3D objektů, jejich reprezentace v paměti počítače.
9 Prostorová grafika a modelování těles Studijní cíl Tento blok je věnován základům 3D grafiky. Jedná se především o vysvětlení principů vytváření modelů 3D objektů, jejich reprezentace v paměti počítače.
Počítačová grafika SZŠ A VOŠZ MERHAUTOVA 15, BRNO
 Počítačová grafika SZŠ A VOŠZ MERHAUTOVA 15, BRNO 1 Základní dělení 3D grafika 2D grafika vektorová rastrová grafika 2/29 Vektorová grafika Jednotlivé objekty jsou tvořeny křivkami Využití: tvorba diagramů,
Počítačová grafika SZŠ A VOŠZ MERHAUTOVA 15, BRNO 1 Základní dělení 3D grafika 2D grafika vektorová rastrová grafika 2/29 Vektorová grafika Jednotlivé objekty jsou tvořeny křivkami Využití: tvorba diagramů,
1 Jasové transformace
 1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
Text úlohy. Která barva nepatří do základních barev prostoru RGB? Vyberte jednu z nabízených možností: a. Černá b. Červená c. Modrá d.
 Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám
 Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám Číslo projektu: CZ.1.07/1.5.00/34.0883 Název projektu: Rozvoj vzdělanosti Číslo šablony: III/2 Datum vytvoření: 17. 1. 2013 Autor: MgA.
Výukový materiál v rámci projektu OPVK 1.5 Peníze středním školám Číslo projektu: CZ.1.07/1.5.00/34.0883 Název projektu: Rozvoj vzdělanosti Číslo šablony: III/2 Datum vytvoření: 17. 1. 2013 Autor: MgA.
Zpracování obrazu a fotonika 2006
 Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
zdroj světla). Z metod transformace obrázku uvedeme warping a morfing, které se
. Z metod transformace obrázku uvedeme warping a morfing, které se") Kapitola 3 Úpravy obrazu V následující kapitole se seznámíme se základními typy úpravy obrazu. První z nich je transformace barev pro výstupní zařízení, dále práce s barvami a expozicí pomocí histogramu
Kapitola 3 Úpravy obrazu V následující kapitole se seznámíme se základními typy úpravy obrazu. První z nich je transformace barev pro výstupní zařízení, dále práce s barvami a expozicí pomocí histogramu
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Barvy v počítačové grafice
 arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 arvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové zář ení zář
arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 2004 arvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové zář ení zář
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
ODRAZ A LOM SVĚTLA. Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika
 ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
Počítačová grafika. OBSAH Grafické formy: Vektorová grafika Bitmapová (rastrová grafika) Barevné modely
 Barevné modely") Počítačová grafika OBSAH Grafické formy: Vektorová grafika Bitmapová (rastrová grafika) Barevné modely Vektorová grafika Vektorová grafika Příklad vektorové grafiky Zpět na Obsah Vektorová grafika Vektorový
Počítačová grafika OBSAH Grafické formy: Vektorová grafika Bitmapová (rastrová grafika) Barevné modely Vektorová grafika Vektorová grafika Příklad vektorové grafiky Zpět na Obsah Vektorová grafika Vektorový
Omezení barevného prostoru
 Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V
 Kapitola 2 Barvy, barvy, barvičky 2.1 Vnímání barev Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V něm se vyskytují všechny známé druhy záření, např. gama záření či infračervené
Kapitola 2 Barvy, barvy, barvičky 2.1 Vnímání barev Světlo, které vnímáme, představuje viditelnou část elektromagnetického spektra. V něm se vyskytují všechny známé druhy záření, např. gama záření či infračervené
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 Elektronická podpora zkvalitnění výuky CZ.1.07 Vzděláním pro konkurenceschopnost
 Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence schopnost, který je spolufinancován
Registrační číslo projektu: CZ.1.07/1.5.00/34.0553 CZ.1.07 Vzděláním pro konkurenceschopnost Projekt je realizován v rámci Operačního programu Vzdělávání pro konkurence schopnost, který je spolufinancován
Barva. v počítačové grafice. Poznámky k přednášce předmětu Počítačová grafika
 Barva v počítačové grafice Poznámky k přednášce předmětu Počítačová grafika Martina Mudrová 2007 Barvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové
Barva v počítačové grafice Poznámky k přednášce předmětu Počítačová grafika Martina Mudrová 2007 Barvy v počítačové grafice Co je barva? světlo = elmg. vlnění v rozsahu 4,3.10 14-7,5.10 14 Hz rentgenové
transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]
![transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]](/thumbs/88/115112143.jpg "transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]") [1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
[1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
Geometrická optika. Vnímání a měření barev. světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem
 Vnímání a měření barev světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem fyzikální charakteristika subjektivní vjem světelný tok subjektivní jas vlnová
Vnímání a měření barev světlo určitého spektrálního složení vyvolá po dopadu na sítnici oka v mozku subjektivní barevný vjem fyzikální charakteristika subjektivní vjem světelný tok subjektivní jas vlnová
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY
 3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
Interní norma č. 22-102-01/01 Průměr a chlupatost příze
 Předmluva Text vnitřní normy byl vypracován v rámci Výzkumného centra Textil LN00B090 a schválen oponentním řízením dne 7.12.2004. Předmět normy Tato norma stanoví postup měření průměru příze a celkové
Předmluva Text vnitřní normy byl vypracován v rámci Výzkumného centra Textil LN00B090 a schválen oponentním řízením dne 7.12.2004. Předmět normy Tato norma stanoví postup měření průměru příze a celkové
8. PŘÍSTUPOVÉ SYSTÉMY
 Přístupový systém: Přístupové systémy 8. PŘÍSTUPOVÉ SYSTÉMY Systém řízení přístupu umožní osobě na základě prokázání oprávněnosti vstup nebo vjezd do objektu, případně do střežené části objektu. V literatuře
Přístupový systém: Přístupové systémy 8. PŘÍSTUPOVÉ SYSTÉMY Systém řízení přístupu umožní osobě na základě prokázání oprávněnosti vstup nebo vjezd do objektu, případně do střežené části objektu. V literatuře
Operace s obrazem. Biofyzikální ústav LF MU. Projekt FRVŠ 911/2013
 Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Grafické systémy. Obrázek 1. Znázornění elektromagnetického spektra.
 1. 1.5 Světlo a vnímání barev Pro vnímání barev je nezbytné světlo. Viditelné světlo je elektromagnetické záření o vlnové délce 400 750 nm. Různé frekvence světla vidíme jako barvy, od červeného světla
1. 1.5 Světlo a vnímání barev Pro vnímání barev je nezbytné světlo. Viditelné světlo je elektromagnetické záření o vlnové délce 400 750 nm. Různé frekvence světla vidíme jako barvy, od červeného světla
Barevné modely, práce s barvou. Martin Klíma
 Barevné modely, práce s barvou Martin Klíma Proč je barva důležitá Důležitý vizuální atribut Různá zařízení, aplikace, média Monitor Tiskárna Video Televize Světlo a barvy Elektromagnetické vlnění Viditelná
Barevné modely, práce s barvou Martin Klíma Proč je barva důležitá Důležitý vizuální atribut Různá zařízení, aplikace, média Monitor Tiskárna Video Televize Světlo a barvy Elektromagnetické vlnění Viditelná
Digitalizace a zpracování obrazu
 Digitalizace a zpracování obrazu Jaroslav Fiřt a), Radek Holota b) a) Nové technologie výzkumné centrum Sedláčkova 15 306 14 Plzeň tel. (+420) 377236881, kl. 237 e-mail: firt@kae.zcu.cz b) Nové technologie
Digitalizace a zpracování obrazu Jaroslav Fiřt a), Radek Holota b) a) Nové technologie výzkumné centrum Sedláčkova 15 306 14 Plzeň tel. (+420) 377236881, kl. 237 e-mail: firt@kae.zcu.cz b) Nové technologie
Automatické rozpoznávání dopravních značek
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Jiří Hofman Automatické rozpoznávání dopravních značek Semestrální práce z předmětu ITS 2012 Obsah 1. Automatické rozpoznávání dopravních značek (ATSR)...
OBRAZOVÁ ANALÝZA. Speciální technika a měření v oděvní výrobě
 OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
ZPRACOVÁNÍ OBRAZU přednáška 4
 ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ZPRACOVÁNÍ OBRAZU přednáška 4 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha
 Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Colors 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Rozklad spektrálních barev
Barevné systémy 1995-2015 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Colors 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Rozklad spektrálních barev
CVIČNÝ TEST 37. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
Geometrické transformace
 1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
PROJEKT 3 2D TRAJEKTORIE KAMERY SEMESTRÁLNÍ PRÁCE DO PŘEDMĚTU MAPV
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Barvy v počítačové grafice
 arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 24 arvy v počítačové grafice o je barva? světlo = elmg. vlnění v rozsahu 4,3. 4-7,5. 4 Hz viditelná č ást spektra rentgenové
arvy v počítačové grafice 2. přednáška předmětu Zpracování obrazů Martina Mudrová 24 arvy v počítačové grafice o je barva? světlo = elmg. vlnění v rozsahu 4,3. 4-7,5. 4 Hz viditelná č ást spektra rentgenové
VYUŽITÍ POČÍTAČOVÉ GRAFIKY
 POČÍTAČOVÁ GRAFIKA VYUŽITÍ POČÍTAČOVÉ GRAFIKY ÚPRAVA FOTOGRAFIÍ NAFOCENÉ FOTOGRAFIE Z DIGITÁLNÍHO FOTOAPARÁTU MŮŽEME NEJEN PROHLÍŽET, ALE TAKÉ UPRAVOVAT JAS KONTRAST BAREVNOST OŘÍZNUTÍ ODSTRANĚNÍ ČERVENÝCH
POČÍTAČOVÁ GRAFIKA VYUŽITÍ POČÍTAČOVÉ GRAFIKY ÚPRAVA FOTOGRAFIÍ NAFOCENÉ FOTOGRAFIE Z DIGITÁLNÍHO FOTOAPARÁTU MŮŽEME NEJEN PROHLÍŽET, ALE TAKÉ UPRAVOVAT JAS KONTRAST BAREVNOST OŘÍZNUTÍ ODSTRANĚNÍ ČERVENÝCH
Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe.
 4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
12 Metody snižování barevného prostoru
 12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Analýza pohybu. Karel Horák. Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok.
 1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
1 / 40 Analýza pohybu Karel Horák Rozvrh přednášky: 1. Úvod. 2. Úlohy analýzy pohybu. 3. Rozdílové metody. 4. Estimace modelu prostředí. 5. Optický tok. 2 / 40 Analýza pohybu Karel Horák Rozvrh přednášky:
DUM 01 téma: Úvod do počítačové grafiky
 DUM 01 téma: Úvod do počítačové grafiky ze sady: 02 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
DUM 01 téma: Úvod do počítačové grafiky ze sady: 02 tematický okruh sady: Bitmapová grafika ze šablony: 09 Počítačová grafika určeno pro: 2. ročník vzdělávací obor: vzdělávací oblast: číslo projektu: anotace:
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Úloha 1. Text úlohy. Vyberte jednu z nabízených možností: NEPRAVDA. PRAVDA Úloha 2. Text úlohy
 Úloha 1 Úloha 2 Otázka se týká předchozího kódu. Určete pravdivost následujícího tvrzení: "Pro každý bod vytvoří úsečku mezi ním a středem panelu." Úloha 3 Otázka se týká předchozího kódu. Určete pravdivost
Úloha 1 Úloha 2 Otázka se týká předchozího kódu. Určete pravdivost následujícího tvrzení: "Pro každý bod vytvoří úsečku mezi ním a středem panelu." Úloha 3 Otázka se týká předchozího kódu. Určete pravdivost
Data v počítači. Informační data. Logické hodnoty. Znakové hodnoty
 Data v počítači Informační data (elementární datové typy) Logické hodnoty Znaky Čísla v pevné řádové čárce (celá čísla) v pohyblivé (plovoucí) řád. čárce (reálná čísla) Povelová data (instrukce programu)
Data v počítači Informační data (elementární datové typy) Logické hodnoty Znaky Čísla v pevné řádové čárce (celá čísla) v pohyblivé (plovoucí) řád. čárce (reálná čísla) Povelová data (instrukce programu)
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Defektoskopie. 1 Teoretický úvod. Cíl cvičení: Detekce měřicího stavu a lokalizace objektu
 Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
Defektoskopie Cíl cvičení: Detekce měřicího stavu a lokalizace objektu 1 Teoretický úvod Defektoskopie tvoří v počítačovém vidění oblast zpracování snímků, jejímž úkolem je lokalizovat výrobky a detekovat
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Kreslení elipsy Andrej Podzimek 22. prosince 2005
 Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Funkce a základní pojmy popisující jejich chování
 a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
7. Rozdělení pravděpodobnosti ve statistice
 7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost.
 Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost. Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a
Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost. Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a
Bitmapová grafika: Vrstvy - interakce (režimy prolnutí)
") VY_32_INOVACE_PG3108 ; Mgr. Pavel Hauer ; 5/2012; 1.ročník; bitmapová grafika, Počítačová grafika; názorná pomůcka pro výuku, opakování, doplnění látky Bitmapová grafika: Vrstvy - interakce (režimy prolnutí)
VY_32_INOVACE_PG3108 ; Mgr. Pavel Hauer ; 5/2012; 1.ročník; bitmapová grafika, Počítačová grafika; názorná pomůcka pro výuku, opakování, doplnění látky Bitmapová grafika: Vrstvy - interakce (režimy prolnutí)
TECHNICKÁ DOKUMENTACE
 TECHNICKÁ DOKUMENTACE Jan Petřík 2013 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Obsah přednášek 1. Úvod do problematiky tvorby technické dokumentace
TECHNICKÁ DOKUMENTACE Jan Petřík 2013 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky technických předmětů. Obsah přednášek 1. Úvod do problematiky tvorby technické dokumentace
Základy informatiky. 10 Počítačová grafika
 Základy informatiky 10 Počítačová grafika Michal Kačmařík Institut geoinformatiky, VŠB-TUO Osnova přednášky Reprezentace barev v PC Způsoby míchání barev Barevné modely Bitová hloubka Rastrová grafika
Základy informatiky 10 Počítačová grafika Michal Kačmařík Institut geoinformatiky, VŠB-TUO Osnova přednášky Reprezentace barev v PC Způsoby míchání barev Barevné modely Bitová hloubka Rastrová grafika
Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr
 Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
DOKUMENTACE Identifikace pomocí otisků prstů
 DOKUMENTACE Identifikace pomocí otisků prstů Lukáš Rajský, RAJ029 Aleš Seifert, SEI041 1. února 2003 1 1 Úvod První známý systém klasifikace otisku prstů byl zaveden v Indii na počátku minulého století
DOKUMENTACE Identifikace pomocí otisků prstů Lukáš Rajský, RAJ029 Aleš Seifert, SEI041 1. února 2003 1 1 Úvod První známý systém klasifikace otisku prstů byl zaveden v Indii na počátku minulého století
GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 10
 UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 10 Lubomír Vašek Zlín 2013 Tento studijní materiál vznikl za finanční podpory Evropského sociálního fondu (ESF)
UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 10 Lubomír Vašek Zlín 2013 Tento studijní materiál vznikl za finanční podpory Evropského sociálního fondu (ESF)
Úpravy rastrového obrazu
 Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Souřadnicové prostory
 Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Obrazovkový monitor. Antonín Daněk. semestrální práce předmětu Elektrotechnika pro informatiky. Téma č. 7: princip, blokově základní obvody
 Obrazovkový monitor semestrální práce předmětu Elektrotechnika pro informatiky Antonín Daněk Téma č. 7: princip, blokově základní obvody Základní princip proud elektronů Jedná se o vakuovou elektronku.
Obrazovkový monitor semestrální práce předmětu Elektrotechnika pro informatiky Antonín Daněk Téma č. 7: princip, blokově základní obvody Základní princip proud elektronů Jedná se o vakuovou elektronku.
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě