ROBOTIKA HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY. (Stacionární roboty) Prof. František Šolc
|
|
|
- Marek Dušek
- před 6 lety
- Počet zobrazení:
Transkript
1 HISTORIE, SOUČASNOST A BUDOUCNOST ROBOTIKY (Stacionární roboty) Prof. František Šolc 1
2 OBSAH PŘEDNÁŠKY Úvod Historie robotiky Současnost Rozdělení robotů Stacionární roboty Základní charakteristiky Programování a řízení Statistiky vývoje Aplikace Budoucnost Směry výzkumu ve stacionární robotice Závěr 2
3 Úvod Průmyslové roboty stacionární roboty 3

4 Historie Androidy umělé napodobeniny člověka 18. století Pierre Jaquet Droz Jacques de Vaucanson Baron von Kempelen Obdivuji ty co se tolik namáhají vytvořit to co Bůh stvořil tak snadno Jean de la Varende 4
5 5

6 Historie 1920 ROBOT R.U.R. Rossum s Universal Robots Karel a Josef Čapkovi 6

7 Historie 1942 Zákony robotiky - Robot nesmí ublížit člověku, nebo svou nečinností dopustit, aby člověku bylo ublíženo - Robot musí uposlechnout příkazů člověka, kromě případů, kdy tyto příkazy jsou v rozporu s prvním zákonem - Robot musí chránit sám sebe před zničením, kromě případů, kdy tato chrana je v rozporu s prvním nebo druhým zákonem 7
 1951 Mechanický telemanipulátor 1960 První průmyslové roboty Versatran Unimate 1964 Laboratoř U.I.")
8 Historie 1946 ENIAC (Univ. Pelsynvania) 1951 Mechanický telemanipulátor 1960 První průmyslové roboty Versatran Unimate 1964 Laboratoř U.I. na MIT (Minsky) 1968 Autonomní mobilní robot Shakey na MIT 1972 Japan Industrial Robot Association 1974 Robot Institute of America 1975 Robot ASEA IRb6 8


9 Historie Průmyslové roboty 1960 Unimate a Versatran První průmyslové roboty vyvinuté v U.S.A. George Devol Joseph Engelberger Hydraulické servomechanismy, elektromechanické řízení programovacím bubnem 9


10 Historie 1980 VUKOV Prešov PR16 P PR32 E 10
11 Rozdělení robotů ROBOTY aplikací MOBILNÍ STACIONÁRNÍ aplikací LÉTAJÍCÍ PLOVOUCÍ VESMÍRNÉ POZEMNÍ KOLOVÉ, PÁSOVÉ, KOMBINOVANÉ ANDROIDNÍ HUMANOIDNÍ 11

12 Stacionární roboty Základní charakteristiky Průmyslové roboty 2000 Robot ASEA IRb1400 Elektrické synchronní servopohony Řízení průmyslovým PC Váha cca 100 kg Nosnost: 5 kg Přesnost: 0,2mm Rychlost otáčení: 120 o /s Rychlost radiální: 1 m/s Typ řízení: PTP - CP Typ programování: Nepřímé učení - plánování Počet os: 6 12
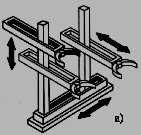
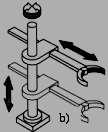
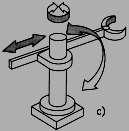
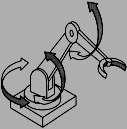
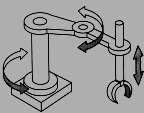
13 Stacionární roboty Základní charakteristiky Kinematické koncepce, počet stupňů volnosti VERSATRAN UNIMATE 13

14 Stacionární roboty Základní charakteristiky Speciální kinematické koncepce zvětšující manipulační schopnosti 14

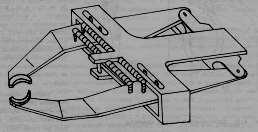
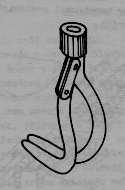
15 Stacionární roboty Základní charakteristiky Koncové členy Eulerovo zápěstí Chapadla a technologické hlavice 15


16 Stacionární roboty Základní charakteristiky Progresivní mechanické prvky použité u robota ASEA IRb6 Harmonická převodovka Kuličkový šroub 16
17 Stacionární roboty Programování a řízení PROGRAMOVÁNÍ ŘÍZENÍ NEPŘÍMÉ UČENÍ PTP PŘÍMÉ UČENÍ CP PLÁNOVÁNÍ MANUÁLNÍ 17


18 Stacionární roboty Programování a řízení Typ programování -nepřímé učení 18



19 Stacionární roboty Programování a řízení Typ řízení PTP Point To Point 19



20 Stacionární roboty Programování a řízení Typ programování -přímé učení Typ řízení CP Continuous Path 20
 v pracovním prostoru")
21 Stacionární roboty Programování a řízení Průmyslové roboty Programovací panel Robota ASEA IRb1400 umožňuje programování (plánování dráhy) v pracovním prostoru 21

22 Stacionární roboty Statistiky vývoje zdroj: United Nations Economic Commission for Europe,

23 Stacionární roboty Statistiky vývoje zdroj: United Nations Economic Commission for Europe,

24 Stacionární roboty Statistiky vývoje zdroj: United Nations Economic Commission for Europe,

25 Stacionární roboty Statistiky vývoje zdroj: United Nations Economic Commission for Europe,

26 Stacionární roboty Statistiky vývoje zdroj: United Nations Economic Commission for Europe,
27 Stacionární roboty Aplikace Stacionární roboty aplikace Roboty Konvenční Pokročilé Aplikace Klasické Průmyslové aplikace Montáže, demontáže Pokročilé Aplikace v potravinářství a zemědělství Chirurgické operace 27


28 Stacionární roboty Aplikace Klasické aplikace 28


29 Stacionární roboty Aplikace Pokročilé aplikace Milking robots ks, ks 29
 2002 50ks 2005 1000ks")
30 Stacionární roboty Aplikace Pokročilé aplikace Automatické tankování vozidel (tankování automobilů na vodíkový pohon) ks ks 30

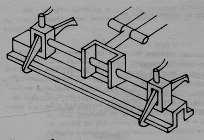
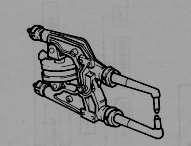
 Da Vinci fy Intuitive")
31 Pokročilé aplikace Stacionární roboty Aplikace Příklad použití soustavy stacionárních robotů pro provádění chirurgické operace Minimal Invasive surgery (soustava Zeus fy Computer Motion) Da Vinci fy Intuitive Surgical 31

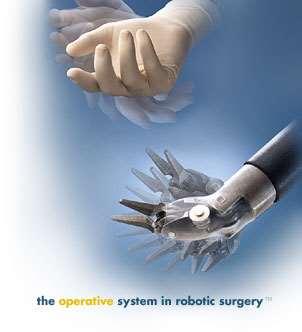
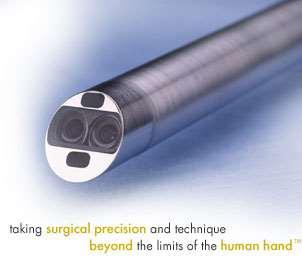
32 Stacionární roboty Aplikace Pokročilé aplikace 32
33 Budoucnost Perspektivní směry výzkumu ve stac. robotice Problémy řízení rychlých a pružných robotických systémů Problémy řízení v pracovním prostoru s pomocí vnější vazby Konstrukce a řízení paralelních struktur Přímé plánování s pomocí výkresové dokumnetace CAD Netradční pohony Aplikace telepresence Zvyšování manipulačních schopností ruka (pomoc tělesně postiženým) 33
34 34 Řízení rychlých a pružných soustav (v prac. prostoru) s pomocí vnější zpětné vazby Jq q q f X X f q q f X T q c q q h q H q ) ( ) ( ) ( ) ( ) ( 1, T X c X X J h X X J H ) ( ) ( ) ( 1 1, Budoucnost

35 Budoucnost Konstrukce a řízení paralelních struktur Výhody -zrychlení dynamiky -zvýšení tuhosti Nevýhody -zmenšení pracovního prostoru -složitý způsob řízení 35

36 Budoucnost Přímé plánování s pomocí výkresové dokumentace CAD Roboty ASEA IRb6 vybavené optickou zpětnou vazbou a řidicím systémem s programováním v pracovním prostoru robota. Výsledek grantu GAČR
 -zkrácení 10% -mech.")
37 Budoucnost Netradiční pohony Lidské svaly -zkrácení 40% -mech. napětí 0,35 MPa Pneumatické svaly (McKibben) -zkrácení 10% -mech. napětí 0,5 MPa GAČR 102/02/0782 p 0 = 10 kpa p 1 = 500 kpa 37



38 Budoucnost Netradiční pohony SMA Shape Memory Alloy -dráty o průměru 0,025-0,4 mm -mech. napětí 600 Mpa (0.3-75N) -zkrácení 5% NITINOL Nickel Titannum Naval Ordnace Laboratory 38

39 Budoucnost 39

40 Budoucnost Aplikace telepresence Stacionární roboty mohou být k provádění citlivých manipulačních úkonů řízeny dálkově člověkem. Slouží k tomu např. speciální rukavice, ve kterých operátor cítí uchopovaný objekt. GAČR 102/02/


41 Budoucnost Zvyšování manipulačních schopností Pomoc tělesně postiženým 41
42 Závěr Mobilní roboty Stacionární - Průmyslové roboty 42
43 Závěr ASIMO P3 fy Honda váha 130 kg výška 160 cm nosnost 2x9 kg rychlost 2 km/h 14 let výzkumu Obdivuji ty co se tolik namáhají vytvořit to co Bůh stvořil tak snadno Jean de la Varende 43

44 Závěr 44
45 Závěr Roboty v automobilismu Roboty pro volný čas Servisní roboty Stacionární - Průmyslové roboty 45
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ TRENDY EVROPSKÉHO STAVEBNICTVÍ
 ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Robotika průmyslové roboty. Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002
 Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Motivační přednáška. Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 ZÁKLADY ROBOTIKY Motivační přednáška Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247
ZÁKLADY ROBOTIKY Motivační přednáška Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
HR v době R.U.R. JUDr. Jan Diblík
 Konference Světová laboratoř lídrů HR v době R.U.R. JUDr. Jan Diblík 23.10.2018 Úvod umělé (lidské) bytosti se objevují v kolektivním vědomí lidstva již ve velmi raných dobách antické Řecko: bůh Héfaistos
Konference Světová laboratoř lídrů HR v době R.U.R. JUDr. Jan Diblík 23.10.2018 Úvod umělé (lidské) bytosti se objevují v kolektivním vědomí lidstva již ve velmi raných dobách antické Řecko: bůh Héfaistos
Roboty a manipulátory. Učební text VOŠ a SPŠ Kutná Hora
 Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Roboty a manipulátory Učební text VOŠ a SPŠ Kutná Hora Robotika - úvod Definice průmyslového robotu Historie automatický stroj, obsahující manipulátor se dvěma a více pohybovými osami a programovatelný
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Úvod do průmyslové robotiky. Aleš Pochylý. Co je to robot? Robotizované pracoviště. Znalosti v robotice. Robotický systém
 Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Průmyslové roboty: sériová kinematika Nejvíce používané typy robotů: 6 DOF robot (základní struktura 6R + speciální typy: svařovací, ) 4 DOF robot SCARA (3R + T) 4 DOF robot paletizační (4R), pochyly.a@fme.vutbr.cz
Obsah DÍL 1. Předmluva 11
 DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
Úvod. Robotika. Úvod. Vladimír Smutný. Centrum strojového vnímání. Český institut informatiky, robotiky a kybernetiky (CIIRC)
") Úvod Robotika Úvod Vladimír Smutný Centrum strojového vnímání Český institut informatiky, robotiky a kybernetiky (CIIRC) České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Robotika
Úvod Robotika Úvod Vladimír Smutný Centrum strojového vnímání Český institut informatiky, robotiky a kybernetiky (CIIRC) České vysoké učení technické v Praze ROBOTICS: Vladimír Smutný Slide, Page Robotika
AUTOMATIZACE V ODĚVNÍ VÝROBĚ. Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D.
 AUTOMATIZACE V ODĚVNÍ VÝROBĚ Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D. Podmínky pro úspěšné absolvování ZÁPOČET Vypracování a ústní obhajoba dvou semestrálních prací Účast na cvičeních a získání
AUTOMATIZACE V ODĚVNÍ VÝROBĚ Doc. Ing. A. Havelka, CSc. Ing. Petra Komárková, Ph.D. Podmínky pro úspěšné absolvování ZÁPOČET Vypracování a ústní obhajoba dvou semestrálních prací Účast na cvičeních a získání
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
 Struktura průmyslového RaM (PRaM)") TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
TRENČIANSKA UNIVERZITA ALEXANDRA DUBČEKA V TRENČÍNE FAKULTA ŠPECIÁLNEJ TECHNIKY Předmět Základy robotizácie Přednáška Úvod do předmětu Rozdělení robotů a manipulátorů (RaM) Struktura průmyslového RaM (PRaM)
Přednáška pro studenty střední školy SPŠ strojnická a SOŠ profesora Švejcara Plzeň. Aplikace s průmyslovými roboty
 Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň Monitorovací indikátor: 06.43.10
Název projektu: Automatizace výrobních procesů ve strojírenství a řemeslech Registrační číslo: CZ.1.07/1.1.30/01.0038 Příjemce: SPŠ strojnická a SOŠ profesora Švejcara Plzeň Monitorovací indikátor: 06.43.10
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD
 PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
SICK ROBOTICKÉ APLIKACE
 SICK ROBOTICKÉ APLIKACE Martin Oswald Září 2017 Výroba má být co nejjednodušší a výrobek prakticky nejlepší. Všechno udělají živé stroje - člověk bude dělat, jen to co miluje. Bude žít proto, aby se zdokonaloval.
SICK ROBOTICKÉ APLIKACE Martin Oswald Září 2017 Výroba má být co nejjednodušší a výrobek prakticky nejlepší. Všechno udělají živé stroje - člověk bude dělat, jen to co miluje. Bude žít proto, aby se zdokonaloval.
1.6 Definice robotů, průmyslových robotů a manipulátorů (PRaM) Aspekty pro posuzováni robotů... 47
 Aspekty pro posuzováni robotů... 47") OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
OBSAH Úvod... 7 1. Vývoj a definice robotů... 20 1.1 Od mechanických figurín a písařů k robotům... 20 1.2 Náhrada člověka robotem ve výrobním procesu... 25 1.3 Systémové pojetí výrobních strojů ve vztahu
Pohony. Petr Žabka Šimon Kovář
 Pohony Petr Žabka Šimon Kovář Pohony Základní rozdělení pohonů: Elektrické Pneumatické Hydraulické Spalovací motory Design Methodology 2017 Elektrické Pohony Elektrické pohony lze dále dělit na: Asynchronní
Pohony Petr Žabka Šimon Kovář Pohony Základní rozdělení pohonů: Elektrické Pneumatické Hydraulické Spalovací motory Design Methodology 2017 Elektrické Pohony Elektrické pohony lze dále dělit na: Asynchronní
14.16 Zvláštní typy převodů a převodovek
 Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Název školy Číslo projektu Autor Název šablony Název DUMu Tematická oblast Předmět Druh učebního materiálu Anotace Vybavení, pomůcky Ověřeno ve výuce dne, třída Střední průmyslová škola strojnická Vsetín
Studentská 1402/ Liberec 1 tel.: cxi.tul.cz. Ostatní přístroje
 Ostatní přístroje Oddělení konstrukce strojů, nanovlákenných a netkaných materiálů Simulace a pokročilé analýzy pohybu MD Adams (Multidisciplinární simulační systém pro moderní technické obory ) Možnosti
Ostatní přístroje Oddělení konstrukce strojů, nanovlákenných a netkaných materiálů Simulace a pokročilé analýzy pohybu MD Adams (Multidisciplinární simulační systém pro moderní technické obory ) Možnosti
Studentská 1402/ Liberec 1 tel.: cxi.tul.cz. Ostatní přístroje
 Ostatní přístroje Oddělení konstrukce strojů, nanovlákenných a netkaných materiálů Simulace a pokročilé analýzy pohybu MD Adams (Multidisciplinární simulační systém pro moderní technické obory ) Možnosti
Ostatní přístroje Oddělení konstrukce strojů, nanovlákenných a netkaných materiálů Simulace a pokročilé analýzy pohybu MD Adams (Multidisciplinární simulační systém pro moderní technické obory ) Možnosti
Směrové řízení vozidla. Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D.
 Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Průmyslový robot je automatický stroj s využitím ve výrobním procesu. Nahrazuje fyzickou a rutinní práci v technologickém procesu.
 Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
Robotika - Terminologie Robotika je věda o robotech včetně návrhu, vzhledu, výrobě, použití a diagnostiky. Je o tvorbu inteligentních strojů propojujících vědecké a inženýrské obory. Je založena na mechanice,
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.
![MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.](/thumbs/91/105892726.jpg "MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.") MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
Automatizace. Vývojová a konstrukční kancelář. Telefon: + 420 466 614 164 + 420 464 625 901
 Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
Automatizace vaclavovicj@jhv.cz,www.jhv.cz Úvod Komplexní služby v průmyslové automatizaci Od jednoduchých pracovišť k plně automatizovaným výrobním linkám Všechny stroje dodávané s potřebnými dokumenty
HYDRAULICKÝ DVOUSLOUPOVÝ ZVEDÁK
 WWW.AUTOMOTIVE.CZ HYDRAULICKÝ DVOUSLOUPOVÝ ZVEDÁK Ekonomický hydraulický pohon. Elektro-magnetické tlačítkové ovládání. Nástavce na ramena 50 mm a 100 mm. - NOSNOST 2500 kg/3000 kg - ASYMETRICKÁ KONSTRUKCE
WWW.AUTOMOTIVE.CZ HYDRAULICKÝ DVOUSLOUPOVÝ ZVEDÁK Ekonomický hydraulický pohon. Elektro-magnetické tlačítkové ovládání. Nástavce na ramena 50 mm a 100 mm. - NOSNOST 2500 kg/3000 kg - ASYMETRICKÁ KONSTRUKCE
Integrovaná střední škola, Sokolnice 496
 Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Integrovaná střední škola, Sokolnice 496 Název projektu: Moderní škola Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Kód výstupu:
Bosch Rexroth v České republice. Produktová brožura
 Bosch Rexroth v České republice Produktová brožura 2 Bosch Rexroth, spol. s r. o. Rexroth v České republice PŘEDSTAVENÍ Od roku 1990 zastupujeme Bosch Rexroth AG, tohoto čelního světového výrobce komponentů
Bosch Rexroth v České republice Produktová brožura 2 Bosch Rexroth, spol. s r. o. Rexroth v České republice PŘEDSTAVENÍ Od roku 1990 zastupujeme Bosch Rexroth AG, tohoto čelního světového výrobce komponentů
Katedra sklářských strojů a robotiky S námi máte svět v rukou.
 S námi máte svět v rukou. Vlastimil Hotař S námi máte svět v rukou. Vlastimil Hotař STUDUJTE TO, CO VÁS BUDE BAVIT Navazující magisterský studijní program v zaměření Sklářské stroje a robotika (obor Konstrukce
S námi máte svět v rukou. Vlastimil Hotař S námi máte svět v rukou. Vlastimil Hotař STUDUJTE TO, CO VÁS BUDE BAVIT Navazující magisterský studijní program v zaměření Sklářské stroje a robotika (obor Konstrukce
Aplikace. zákaznická řešení TOX PRESSOTECHNIK. TOX -Clinching Spojování. Montáž. Zalisování. Nýtování. Děrování. Značení. Upínání. Lisování.
 Aplikace TOX -Clinching Spojování Montáž Zalisování TOX PRESSOTECHNIK zákaznická řešení Nýtování Děrování Značení Upínání Lisování Ohýbání TOX -Systémová řešení Modulární pohony TOX -Powerpackage energeticky
Aplikace TOX -Clinching Spojování Montáž Zalisování TOX PRESSOTECHNIK zákaznická řešení Nýtování Děrování Značení Upínání Lisování Ohýbání TOX -Systémová řešení Modulární pohony TOX -Powerpackage energeticky
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
ELVAC a.s. ELVAC SOLUTIONS Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ
 ELVAC SOLUTIONS ELVAC a.s. Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ STROJNÍ INŽENÝRING ŘEŠENÍ, PRODUKTY A SLUŽBY ROBOTIKA Poskytujeme inženýrsko-dodavatelské služby v oblasti jednoúčelových
ELVAC SOLUTIONS ELVAC a.s. Strojní inženýring Elektroinženýring Software KATALOG ŘEŠENÍ STROJNÍ INŽENÝRING ŘEŠENÍ, PRODUKTY A SLUŽBY ROBOTIKA Poskytujeme inženýrsko-dodavatelské služby v oblasti jednoúčelových
Pneumatika. Potravinářství
 Pneumatika U pneumatických mechanismů je jako pracovní médium používán stlačený vzduch. V porovnání s hydraulickými mechanismy, kde je ve většině případů používán olej, mají pneumatické mechanismy řadu
Pneumatika U pneumatických mechanismů je jako pracovní médium používán stlačený vzduch. V porovnání s hydraulickými mechanismy, kde je ve většině případů používán olej, mají pneumatické mechanismy řadu
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
ÚVOD DO NC TECHNIKY VELKOSÉRIOVÁ A HROMADNÁ VÝROBA MALOSÉRIOVÁ A KUSOVÁ VÝROBA
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 ÚVOD DO NC TECHNIKY Dlouhodobým směrem rozvoje ve všech výrobních odvětvích, a tedy i ve strojírenství, je
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 ÚVOD DO NC TECHNIKY Dlouhodobým směrem rozvoje ve všech výrobních odvětvích, a tedy i ve strojírenství, je
M3A ROB: 7. Konstrukce robotů
 ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
ABB Robotika, září 2016 IRB 1200 Doplněk učebních materiálů SŠSE Brno Trnkova 113 M3A ROB: 7. Konstrukce robotů Ing. Vladimír Vyhňák 2. září 2016 Slide 1 IRB 1200 Program Klíčový přínos Přehled a vize
Inovace robotu BCN3D MOVEO
 Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
Inovace robotu BCN3D MOVEO Tomáš Havlan ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a zařízení, Technická 4, 166 07 Praha 6, Česká republika Abstrakt Cílem této práce je funkční model robotu
Pracovní plošiny PAUS Ceník platný od 1.2.2012
 Pracovní plošiny PAUS Ceník platný od 1.2.2012 Přívěsné pracovní plošiny Pracovní plošiny jako nástavba na podvozku lehkého nákladního automobilu Pracovní plošiny vyráběné německou firmou Herman PAUS Maschienenfabrik
Pracovní plošiny PAUS Ceník platný od 1.2.2012 Přívěsné pracovní plošiny Pracovní plošiny jako nástavba na podvozku lehkého nákladního automobilu Pracovní plošiny vyráběné německou firmou Herman PAUS Maschienenfabrik
PŘEVODOVÉ ÚSTROJÍ. přenáší výkon od motoru na hnací kola a podle potřeby mění otáčky s kroutícím momentem
 PŘEVODOVÉ ÚSTROJÍ přenáší výkon od motoru na hnací kola a podle potřeby mění otáčky s kroutícím momentem Uspořádání převodového ústrojí se řídí podle základní konstrukční koncepce automobilu. Ve většině
PŘEVODOVÉ ÚSTROJÍ přenáší výkon od motoru na hnací kola a podle potřeby mění otáčky s kroutícím momentem Uspořádání převodového ústrojí se řídí podle základní konstrukční koncepce automobilu. Ve většině
Momentové motory. (vestavné provedení) TGQ Momentové (přímé) motory
 TGQ Momentové (přímé) motory") Momentové motory (vestavné provedení) TGQ Momentové (přímé) motory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Momentové motory (vestavné provedení) TGQ Momentové (přímé) motory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
TÉMA 4. Projekt: Téma: Ročník: 3. Zpracoval(a): Pavel Urbánek
: Pavel Urbánek") Projekt: Téma: TÉMA 4 Montáž základních druhů rozebíratelných spojení, montáž šroubovitých a kolíkových spojů, montáž mechanismů a potrubí Obor: Zámečník Ročník: 3. Zpracoval(a): Pavel Urbánek Střední
Projekt: Téma: TÉMA 4 Montáž základních druhů rozebíratelných spojení, montáž šroubovitých a kolíkových spojů, montáž mechanismů a potrubí Obor: Zámečník Ročník: 3. Zpracoval(a): Pavel Urbánek Střední
TRANSPORTATION & TECHNOLOGIE
 www.tratec.cz TRANSPORTATION & TECHNOLOGIE OUR SOLUTION 4 YOUR VISION Mise a vize OUR SOLUTION 4 YOUR VISION Design Vytváříme aplikacím jejich vzhled a vnášíme jim jejich krásu. Inteligence Podporujeme
www.tratec.cz TRANSPORTATION & TECHNOLOGIE OUR SOLUTION 4 YOUR VISION Mise a vize OUR SOLUTION 4 YOUR VISION Design Vytváříme aplikacím jejich vzhled a vnášíme jim jejich krásu. Inteligence Podporujeme
Vyrobeno pro budoucnost: ArciTech
 Vyrobeno pro budoucnost: ArciTech ArciTech Hladký, silný a flexibilní Jedinečně komfortní pohyb: Hladký a lehký Perfektně vyladěný pohyb Mimořádná stabilita: Splňuje všechny požadavky Výsuvy s nosností
Vyrobeno pro budoucnost: ArciTech ArciTech Hladký, silný a flexibilní Jedinečně komfortní pohyb: Hladký a lehký Perfektně vyladěný pohyb Mimořádná stabilita: Splňuje všechny požadavky Výsuvy s nosností
Univerzální profilovací linky
 1 Univerzální profilovací linky Rovnací zařízení Podavač Odvíjecí buben Hydraulický lis Kontrola smyčky Vevádění plechu Rychlovýměnné kazety Linku navrhneme podle Vašich potřeb konstrukce a výroba na míru
1 Univerzální profilovací linky Rovnací zařízení Podavač Odvíjecí buben Hydraulický lis Kontrola smyčky Vevádění plechu Rychlovýměnné kazety Linku navrhneme podle Vašich potřeb konstrukce a výroba na míru
4WS řízení zadních kol
 4WS řízení zadních kol Pavel Brabec 1), Miroslav Malý 2), Robert Voženílek 3) Abstract Four-Wheel Steering Rear Wheels Control. For parking and low-speed maneuvers, the rear wheels steer in the opposite
4WS řízení zadních kol Pavel Brabec 1), Miroslav Malý 2), Robert Voženílek 3) Abstract Four-Wheel Steering Rear Wheels Control. For parking and low-speed maneuvers, the rear wheels steer in the opposite
Technologický proces
 OBRÁBĚCÍ STROJE Základní definice Stroj je systém mechanismů, které ulehčují a nahrazují fyzickou práci člověka. Výrobní stroj je uměle vytvořená dynamická soustava, sloužící k realizaci úkonů technologického
OBRÁBĚCÍ STROJE Základní definice Stroj je systém mechanismů, které ulehčují a nahrazují fyzickou práci člověka. Výrobní stroj je uměle vytvořená dynamická soustava, sloužící k realizaci úkonů technologického
VÝROBNÍ STROJE. EduCom. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita v Liberci
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Technická univerzita
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme
 Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
Virtuální ověřování výroby Robotika Process Simulate Virtual Commissioning Virtuelle Inbetriebnahme Martin Baumruk Jiří Kopenec Siemens PLM Connection 2012 Česká republika 3. 5. června, Seč Dněšní workflow
Machines. HELLER Obráběcí centra. Měřítko pro obrábění v 5 -ti osách. Nová řada F.
 Machines HELLER Obráběcí centra Měřítko pro obrábění v 5 -ti osách. Nová řada F. V krátkosti FT 2000/4000 Dvě velikosti strojů s různými pracovními prostory: FT 2000 (630/630/830) a FT 4000(800/800/1000)
Machines HELLER Obráběcí centra Měřítko pro obrábění v 5 -ti osách. Nová řada F. V krátkosti FT 2000/4000 Dvě velikosti strojů s různými pracovními prostory: FT 2000 (630/630/830) a FT 4000(800/800/1000)
LOGISTIKA. Ing. Eva Skalická. Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou
 LOGISTIKA Ing. Eva Skalická Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou AKTIVNÍ PRVKY LOGISTIKY VY_32_INOVACE_07_2_18_EK Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou VYMEZENÍ AKTIVNÍCH PRVKŮ Posláním aktivních prvků
LOGISTIKA Ing. Eva Skalická Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou AKTIVNÍ PRVKY LOGISTIKY VY_32_INOVACE_07_2_18_EK Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou VYMEZENÍ AKTIVNÍCH PRVKŮ Posláním aktivních prvků
FAKULTA STROJNÍHO INŽENÝRSTVÍ, VUT BRNO NETME Centre
 Quality control Robotic machining Rapid prototyping 3D optical digitalization Additive manufacturing of metal parts Mechanical and industrial design Obsah prezentace Představení pracoviště Laboratoře Vývoj
Quality control Robotic machining Rapid prototyping 3D optical digitalization Additive manufacturing of metal parts Mechanical and industrial design Obsah prezentace Představení pracoviště Laboratoře Vývoj
SILVYN CHAIN Lehká řada. SILVYN CHAIN Střední řada. Systémy pro ochranu a vedení kabelů SILVYN CHAIN energetické řetězy Lehká řada/střední řada
 Lehká řada/střední řada SILVYN CHAIN Lehká řada Lehká váha pro minimální prostorové možnosti a nejvyšší rychlosti pojezdu. Ve spojení s příslušným vodícím kanálem jsou možné také dlouhé dráhy pojezdu.
Lehká řada/střední řada SILVYN CHAIN Lehká řada Lehká váha pro minimální prostorové možnosti a nejvyšší rychlosti pojezdu. Ve spojení s příslušným vodícím kanálem jsou možné také dlouhé dráhy pojezdu.
typ LC 590 Automat Ref. No. 16.110
 Ferdus, s.r.o. J. Fučíka 699, 768 11 Chropyně e-mail: info@ferdus.cz, tel./fax: 577 103 566, 573 356 390 E-OBCHOD : www.ferdus.cz Montážní stroj nákladních a traktorových pneumatik typ LC 590 Automat Ref.
Ferdus, s.r.o. J. Fučíka 699, 768 11 Chropyně e-mail: info@ferdus.cz, tel./fax: 577 103 566, 573 356 390 E-OBCHOD : www.ferdus.cz Montážní stroj nákladních a traktorových pneumatik typ LC 590 Automat Ref.
Motivační aktivity. Doc.Ing. Bohumil Horák, Ph.D., Ing. Kristýna Friedrischková
 Motivační aktivity Doc.Ing. Bohumil Horák, Ph.D., Ing. Kristýna Friedrischková VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky, kat.450 v/v skupina Systémy Alternativních Zdrojů
Motivační aktivity Doc.Ing. Bohumil Horák, Ph.D., Ing. Kristýna Friedrischková VŠB Technická univerzita Ostrava Fakulta elektrotechniky a informatiky, kat.450 v/v skupina Systémy Alternativních Zdrojů
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
Masarykova střední škola zemědělská a Vyšší odborná škola, Opava, příspěvková organizace
 Masarykova střední škola zemědělská a Vyšší odborná škola, Opava, příspěvková organizace Číslo projektu Číslo materiálu Autor Průřezové téma Předmět CZ.1.07/1.5.00/34.0565 VY_32_INOVACE_286_Historie_počítačů
Masarykova střední škola zemědělská a Vyšší odborná škola, Opava, příspěvková organizace Číslo projektu Číslo materiálu Autor Průřezové téma Předmět CZ.1.07/1.5.00/34.0565 VY_32_INOVACE_286_Historie_počítačů
Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015
 Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015 KUKA Roboter GmbH Strana 2 KUKA a Industry 4.0 KUKA je 1898 1956 Společnost KUKA byla založena v Augsburgu jako výrobce acetylénových lamp.
Českomoravská elektrotechnická asociace, MSV 2015, 15.9.2015 KUKA Roboter GmbH Strana 2 KUKA a Industry 4.0 KUKA je 1898 1956 Společnost KUKA byla založena v Augsburgu jako výrobce acetylénových lamp.
R 2 R 4 R 1 R
 TEST:Bc-1314-FYZ Varianta:0 Tisknuto:18/06/2013 1. Jak daleko od Země je Měsíc, jestliže světlo urazí tuto vzdálenost za 1,28 sekundy? Rychlost světla je 300 000 km/s. 1) 384 000 km 2) 425 000 km 4) 256
TEST:Bc-1314-FYZ Varianta:0 Tisknuto:18/06/2013 1. Jak daleko od Země je Měsíc, jestliže světlo urazí tuto vzdálenost za 1,28 sekundy? Rychlost světla je 300 000 km/s. 1) 384 000 km 2) 425 000 km 4) 256
TCE Jednoduchá výměna pneumatik bez námahy
 TCE 4550 Jednoduchá výměna pneumatik bez námahy TCE 4550: Automatická montovačka pneumatik bez montážních pák Nová TCE 4550 je automatická 30 montovačka pneumatik, která zaručuje snadnou a rychlou výměnu
TCE 4550 Jednoduchá výměna pneumatik bez námahy TCE 4550: Automatická montovačka pneumatik bez montážních pák Nová TCE 4550 je automatická 30 montovačka pneumatik, která zaručuje snadnou a rychlou výměnu
1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ. 3. Právní předpisy
 1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
1. přednáška 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ 2. VŠEOBECNÝ PŘEHLED, ROZDĚLENÍ 3. Právní předpisy 1. ÚVOD DO PROBLEMATIKY ZDVIHACÍCH ZAŘÍZENÍ a) Základní pojmy z oblasti zdvihacích zařízení jednoduchá
Katedra sklářských strojů a robotiky S námi máte svět v rukou.
 S námi máte svět v rukou. Vlastimil Hotař S námi máte svět v rukou. Vlastimil Hotař STUDUJTE TO, CO VÁS BUDE BAVIT Navazující magisterský studijní program v zaměření Sklářské stroje a robotika (obor Konstrukce
S námi máte svět v rukou. Vlastimil Hotař S námi máte svět v rukou. Vlastimil Hotař STUDUJTE TO, CO VÁS BUDE BAVIT Navazující magisterský studijní program v zaměření Sklářské stroje a robotika (obor Konstrukce
TECHNICKÁ SPECIFIKACE
 TECHNICKÁ SPECIFIKACE Wakemaster je přenosný dvousloupový system pro celoroční zábavu. Wakeboarding, snowboarding, mountainboarding a další. Jako jediný dvousloupový systém na trhu nabízí inteligentní
TECHNICKÁ SPECIFIKACE Wakemaster je přenosný dvousloupový system pro celoroční zábavu. Wakeboarding, snowboarding, mountainboarding a další. Jako jediný dvousloupový systém na trhu nabízí inteligentní
TVÁŘENÍ KOVŮ Cíl tváření: dát polotovaru požadovaný tvar a rozměry
 TVÁŘENÍ KOVŮ Cíl tváření: dát polotovaru požadovaný tvar a rozměry získat výhodné mechanické vlastnosti ve vztahu k funkčnímu uplatnění tvářence Výhody tváření : vysoká produktivita práce automatizace
TVÁŘENÍ KOVŮ Cíl tváření: dát polotovaru požadovaný tvar a rozměry získat výhodné mechanické vlastnosti ve vztahu k funkčnímu uplatnění tvářence Výhody tváření : vysoká produktivita práce automatizace
Mechatronika a robotika jako vědní disciplína
 Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
Úvod do robotiky a mechatroniky (URM) Přednáška č. 1: Mechatronika a robotika jako vědní disciplína M. Švejda FAV, ZČU v Plzni, Katedra kybernetiky poslední revize: 23. 9. 2014 Organizace předmětu URM
SILNOPROUDÁ ELEKTROTECHNIKA A ELEKTROENERGETIKA. www.uvee.feec.vutbr.cz www.ueen.feec.vutbr.cz
 SILNOPROUDÁ ELEKTROTECHNIKA A ELEKTROENERGETIKA www.uvee.feec.vutbr.cz www.ueen.feec.vutbr.cz FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ Bakalářský studijní program B-SEE Bakalářský studijní program
SILNOPROUDÁ ELEKTROTECHNIKA A ELEKTROENERGETIKA www.uvee.feec.vutbr.cz www.ueen.feec.vutbr.cz FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ Bakalářský studijní program B-SEE Bakalářský studijní program
M6410C/L, M7410C. květen polohový pohon malých lineárních ventilů KATALOGOVÝ LIST
 květen 2000 M6410/L, M7410 3polohový pohon malých lineárních ventilů KTLOGOVÝ LIST Hlavní rysy Malé rozměry dovolují instalovat pohon i v omezených prostorech Nízká spotřeba energie Dlouhodobě spolehlivý
květen 2000 M6410/L, M7410 3polohový pohon malých lineárních ventilů KTLOGOVÝ LIST Hlavní rysy Malé rozměry dovolují instalovat pohon i v omezených prostorech Nízká spotřeba energie Dlouhodobě spolehlivý
Strojní součásti ČÁSTI STROJŮ R
 Strojní součásti ČÁSTI STROJŮ CÍLE PŘEDNÁŠKY Seznámení studentů se základními stavebními prvky strojů a strojního zařízení hřídele, uložení a spojky. OBSAH PŘEDNÁŠKY 1. Strojní součásti. 2. Hřídele a čepy.
Strojní součásti ČÁSTI STROJŮ CÍLE PŘEDNÁŠKY Seznámení studentů se základními stavebními prvky strojů a strojního zařízení hřídele, uložení a spojky. OBSAH PŘEDNÁŠKY 1. Strojní součásti. 2. Hřídele a čepy.
Mechanik převodových a zpomalovacích systémů nákladních vozidel a autobusů (kód: H)
") Mechanik převodových a zpomalovacích systémů nákladních vozidel a autobusů (kód: 23-085-H) Autorizující orgán: Ministerstvo průmyslu a obchodu Skupina oborů: Strojírenství a strojírenská výroba (kód: 23)
Mechanik převodových a zpomalovacích systémů nákladních vozidel a autobusů (kód: 23-085-H) Autorizující orgán: Ministerstvo průmyslu a obchodu Skupina oborů: Strojírenství a strojírenská výroba (kód: 23)
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2014 8 14/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2014 8 14/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 18 0:40 Roboti a jejich programování Robotické mechanické
Výpočtový program DYNAMIKA VOZIDLA Tisk výsledků
 Zadané hodnoty: n motoru M motoru [ot/min] [Nm] 1 86,4 15 96,4 2 12,7 25 14,2 3 16 35 11 4 93,7 45 84,9 5 75,6 55 68,2 Výpočtový program DYNAMIKA VOZIDLA Tisk výsledků m = 1265 kg (pohotovostní hmotnost
Zadané hodnoty: n motoru M motoru [ot/min] [Nm] 1 86,4 15 96,4 2 12,7 25 14,2 3 16 35 11 4 93,7 45 84,9 5 75,6 55 68,2 Výpočtový program DYNAMIKA VOZIDLA Tisk výsledků m = 1265 kg (pohotovostní hmotnost
PARNÍ TURBÍNY EKOL PRO VYUŽITÍ PŘI KOMBINOVANÉ VÝROBĚ ELEKTRICKÉ ENERGIE A TEPLA
 PARNÍ TURBÍNY EKOL PRO VYUŽITÍ PŘI KOMBINOVANÉ VÝROBĚ ELEKTRICKÉ ENERGIE A TEPLA PARNÍ TURBÍNY EKOL PRO VYUŽITÍ PŘI KOMBINOVANÉ VÝROBĚ ELEKTRICKÉ ENERGIE A TEPLA Ing. Bohumil Krška Ekol, spol. s r.o. Brno
PARNÍ TURBÍNY EKOL PRO VYUŽITÍ PŘI KOMBINOVANÉ VÝROBĚ ELEKTRICKÉ ENERGIE A TEPLA PARNÍ TURBÍNY EKOL PRO VYUŽITÍ PŘI KOMBINOVANÉ VÝROBĚ ELEKTRICKÉ ENERGIE A TEPLA Ing. Bohumil Krška Ekol, spol. s r.o. Brno
Technologie II. Strojní programování. Přednáška č. 7. Autor: doc. Ing. Martin Vrabec, CSc.
 Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Projekt OPPA Systém elektronické podpory studia (SEPS) Řešen na FS ČVUT v Praze od 1. 4. 2011 Technologie II Strojní programování Přednáška
Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Projekt OPPA Systém elektronické podpory studia (SEPS) Řešen na FS ČVUT v Praze od 1. 4. 2011 Technologie II Strojní programování Přednáška
5,5 N-WAY / 5,5 N-WAY IN HYDRAULICKÝ ČTYŘSLOUPOVÝ ZVEDÁK
 TÜV NORD CERT GmbH 5,5 N-WAY / 5,5 N-WAY IN HYDRAULICKÝ ČTYŘSLOUPOVÝ ZVEDÁK Základní informace Osobní a užitkové automobily AMI 5,5 N-WAY Konfigurace: AL ochrana plošin 3D KIT + plovoucí desky 2x1650 mm
TÜV NORD CERT GmbH 5,5 N-WAY / 5,5 N-WAY IN HYDRAULICKÝ ČTYŘSLOUPOVÝ ZVEDÁK Základní informace Osobní a užitkové automobily AMI 5,5 N-WAY Konfigurace: AL ochrana plošin 3D KIT + plovoucí desky 2x1650 mm
Hydraulika ve strojírenství
 Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
Hydraulika ve strojírenství Strojírenská výroba je postavena na celé řadě tradičních i moderních technologií: obrábění, tváření, svařování aj. Příslušné technologické operace pak provádějí většinou stroje:
ZÁKLADY PROGRAMOVÁNÍ. Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14
 ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Programování na PC Při programování na PC musíme
ZÁKLADY PROGRAMOVÁNÍ Mgr. Vladislav BEDNÁŘ 2013 2+2.1 3/14 Co je vhodné vědět, než si vybereme programovací jazyk a začneme programovat roboty. 1 / 12 0:40 Programování na PC Při programování na PC musíme
Akční nabídka traktoru YANMAR YT TOP
 Akční nabídka traktoru YANMAR YT 235 - TOP Se souborem komunální techniky a výbavou Chytrý traktor info@zvagro.cz, www.zvagro.cz, www.zvagro/eshop, tel: 775 155 849, 725 311 820 YANMAR YT 235 ZÁKLADNÍ
Akční nabídka traktoru YANMAR YT 235 - TOP Se souborem komunální techniky a výbavou Chytrý traktor info@zvagro.cz, www.zvagro.cz, www.zvagro/eshop, tel: 775 155 849, 725 311 820 YANMAR YT 235 ZÁKLADNÍ
Trubkové pohony, s el. koncovými spínači
 Trubkové pohony, s el. koncovými spínači Neostar MT Ø 45 mm S elektronickými koncovými spínači a enkodérem řízení pohybu. Ideální pro markýzy s hliníkovým boxem Rychlokonektor se 6 piny Ideální motor pro
Trubkové pohony, s el. koncovými spínači Neostar MT Ø 45 mm S elektronickými koncovými spínači a enkodérem řízení pohybu. Ideální pro markýzy s hliníkovým boxem Rychlokonektor se 6 piny Ideální motor pro
PŘEDURČUJE NOVOU ÚLOHU ROBOTŮM
 PRŮMYSL 4. 0 PŘEDURČUJE NOVOU ÚLOHU ROBOTŮM FRANTIŠEK NOVOTNÝ Katedra sklářských strojů a robotiky Fakulta strojní Oddělení mechatronických systémů Ústav pro nanomateriály, pokročilé technologie a inovace
PRŮMYSL 4. 0 PŘEDURČUJE NOVOU ÚLOHU ROBOTŮM FRANTIŠEK NOVOTNÝ Katedra sklářských strojů a robotiky Fakulta strojní Oddělení mechatronických systémů Ústav pro nanomateriály, pokročilé technologie a inovace
Elektromechanické akční členy (2-0-2)
") Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
(lze je rozpojit i za běhu) přenáší pohyb prostřednictvím kapaliny. rozpojovat hřídele za běhu
 přenáší pohyb prostřednictvím kapaliny. rozpojovat hřídele za běhu") zapis_casti_stroju_spojky08/2012 STR Bc 1 z 6 13. Hřídelové spojky Rozdělení: spojují #1 a přenáší mezi nimi otáčivý #2 Schéma zapojení spojky #4 Další funkce spojek vyrovnávají vyosení spojovaných hřídelů
zapis_casti_stroju_spojky08/2012 STR Bc 1 z 6 13. Hřídelové spojky Rozdělení: spojují #1 a přenáší mezi nimi otáčivý #2 Schéma zapojení spojky #4 Další funkce spojek vyrovnávají vyosení spojovaných hřídelů
VY_32_INOVACE_INF.15. Dějiny počítačů II.
 VY_32_INOVACE_INF.15 Dějiny počítačů II. Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 První programovatelné stroje V roce
VY_32_INOVACE_INF.15 Dějiny počítačů II. Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 První programovatelné stroje V roce
Dodatek č. 5 ke školnímu vzdělávacímu programu. Elektrotechnika. (platné znění k 1. 9. 2009)
") Střední průmyslová škola Jihlava tř. Legionářů 1572/3, Jihlava Dodatek č. 5 ke školnímu vzdělávacímu programu Elektrotechnika (platné znění k 1. 9. 2009) Tento dodatek ruší a plně nahrazuje předchozí Dodatek
Střední průmyslová škola Jihlava tř. Legionářů 1572/3, Jihlava Dodatek č. 5 ke školnímu vzdělávacímu programu Elektrotechnika (platné znění k 1. 9. 2009) Tento dodatek ruší a plně nahrazuje předchozí Dodatek
Stroje na obrábění kulových čepů
 Stroje na obrábění kulových čepů TOS KUŘIM OS, a.s. vyrábí a dodává do technologických linek na výrobu kulových čepů o průměrech 19-35 (alternativně 32-100) mm dva typy speciálních strojů. Součástí dodávky
Stroje na obrábění kulových čepů TOS KUŘIM OS, a.s. vyrábí a dodává do technologických linek na výrobu kulových čepů o průměrech 19-35 (alternativně 32-100) mm dva typy speciálních strojů. Součástí dodávky
Otočný stůl nové koncepce pro multifunkční obráběcí centrum
 Otočný stůl nové koncepce pro multifunkční obráběcí centrum Ing. Ondřej Kubera Vedoucí práce: Ing. Lukáš Novotný, Ph.D. Abstrakt Příspěvek popisuje novou koncepci otočného stolu s prstencovým motorem,
Otočný stůl nové koncepce pro multifunkční obráběcí centrum Ing. Ondřej Kubera Vedoucí práce: Ing. Lukáš Novotný, Ph.D. Abstrakt Příspěvek popisuje novou koncepci otočného stolu s prstencovým motorem,
PŘEHLED TÉMAT PRO BAKALÁŘSKÉ A DIPLOMOVÉ PRÁCE VEDOUCÍ PRACÍ:
 PŘEHLED TÉMAT PRO BAKALÁŘSKÉ A DIPLOMOVÉ PRÁCE VEDOUCÍ PRACÍ: prof. Ing. Jaroslav Beran, CSc. doc. Ing. Martin Bílek, Ph.D. Ing. Jozef Kaniok, Ph.D. Ing. Martin Konečný, Ph.D. Ing. Šimon Kovář, Ph.D. Ing.
PŘEHLED TÉMAT PRO BAKALÁŘSKÉ A DIPLOMOVÉ PRÁCE VEDOUCÍ PRACÍ: prof. Ing. Jaroslav Beran, CSc. doc. Ing. Martin Bílek, Ph.D. Ing. Jozef Kaniok, Ph.D. Ing. Martin Konečný, Ph.D. Ing. Šimon Kovář, Ph.D. Ing.
Stříhací nářadí Kabelové nůžky a nože s kryty ostří Kabelový nůž klasický
 Kabelové nůžky a nože s kryty ostří Kabelový nůž klasický Ostří z žíhané nerezové oceli Aretační kryt ostří chrání uživatele před zraněním Vyměnitelné ostří (u AV3920 spolu s adaptérem) Popis Model Délka
Kabelové nůžky a nože s kryty ostří Kabelový nůž klasický Ostří z žíhané nerezové oceli Aretační kryt ostří chrání uživatele před zraněním Vyměnitelné ostří (u AV3920 spolu s adaptérem) Popis Model Délka
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109. Petr Hlávka MECHATRONIKA
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Petr Hlávka MECHATRONIKA SOUBOR PŘÍPRAV PRO 4. R. OBORU 26-41-M/01 ELEKTROTECHNIKA MECHATRONIKA Vytvořeno
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Petr Hlávka MECHATRONIKA SOUBOR PŘÍPRAV PRO 4. R. OBORU 26-41-M/01 ELEKTROTECHNIKA MECHATRONIKA Vytvořeno
Instrukce pro použití. Elektrický servopohon pro křídlové brány ULIXES
 Elektrický servopohon pro křídlové brány 1 2 Bezpečnostní upozornění Tato příručka je určena výhradně kvalifikovaným pracovníkům, nikoliv koncovým uživatelům. Úkolem osoby provádějící instalaci je vysvětlit
Elektrický servopohon pro křídlové brány 1 2 Bezpečnostní upozornění Tato příručka je určena výhradně kvalifikovaným pracovníkům, nikoliv koncovým uživatelům. Úkolem osoby provádějící instalaci je vysvětlit
Trubkové pohony, s mech. koncovými spínači
 Trubkové pohony, s mech. koncovými spínači Neo MH Ø 45 mm S manuálním bezpečnostním odblokováním a mechanickými koncovými spínači. Ideální pro rolety a markýzy Mechanické konc. spínače Ukončení motoru
Trubkové pohony, s mech. koncovými spínači Neo MH Ø 45 mm S manuálním bezpečnostním odblokováním a mechanickými koncovými spínači. Ideální pro rolety a markýzy Mechanické konc. spínače Ukončení motoru
BAKALÁŘSKÁ PRÁCE ALTERNATIVNÍ POHONY VOZIDEL
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ VPRAZE FAKULTA DOPRAVNÍ BAKALÁŘSKÁ PRÁCE ALTERNATIVNÍ POHONY VOZIDEL 2009 Lukáš Novotný Vedoucí práce: Prof. Ing. Jan Kovanda, CSc. Úvod Koncepce alternativních pohonů, obecně:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ VPRAZE FAKULTA DOPRAVNÍ BAKALÁŘSKÁ PRÁCE ALTERNATIVNÍ POHONY VOZIDEL 2009 Lukáš Novotný Vedoucí práce: Prof. Ing. Jan Kovanda, CSc. Úvod Koncepce alternativních pohonů, obecně:
OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ
 OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení spojů z hlediska fyzikální podstaty funkce 2. Spoje se silovým stykem šroubové
OKRUHY K MATURITNÍ ZKOUŠCE - STROJNICTVÍ 1. Spoje a spojovací součásti rozdělení spojů z hlediska rozebíratelnosti rozdělení spojů z hlediska fyzikální podstaty funkce 2. Spoje se silovým stykem šroubové
Ing. Jaromír Kejval, Ph.D.
 Výzkum a vývoj v automobilovém průmyslu 2011 Numerické simulace a zkušebnictví ve vývojovém cyklu automobilu Lázně Bělohrad, 10.11.2011 Únavové vibrační zkoušky ve SWELL Ing. Jaromír Kejval, Ph.D. SPEKTRUM
Výzkum a vývoj v automobilovém průmyslu 2011 Numerické simulace a zkušebnictví ve vývojovém cyklu automobilu Lázně Bělohrad, 10.11.2011 Únavové vibrační zkoušky ve SWELL Ing. Jaromír Kejval, Ph.D. SPEKTRUM
Fortschritt E 302. náhradní díly pro mačkač. (E 301) 4,00 kg
 4,00 kg") Orig.číslo Číslo SOKO Název ND / použití u: MOcena Kč/ks Obr. Váha skupina - tabulka č. 02 4131771912 302002.12 Pružina nekompletní skupina - Hnací kolo 1 195 Kč (E 303) 3,00 kg tabulka č. 03 4131771535
Orig.číslo Číslo SOKO Název ND / použití u: MOcena Kč/ks Obr. Váha skupina - tabulka č. 02 4131771912 302002.12 Pružina nekompletní skupina - Hnací kolo 1 195 Kč (E 303) 3,00 kg tabulka č. 03 4131771535
GRANI ROC MODEL: MEM 2000
 V Hradci Králové dne: GRANI ROC AUTOMATICKÁ MOBILNÍ JEDNOLANOVÁ PILA NA DĚLENÍ BLOKŮ MODEL: MEM 2000 MEM-2000 lanová pila je určena k zarovnávání bloků a řezání desek. Mobilní proto, že umožňuje řezat
V Hradci Králové dne: GRANI ROC AUTOMATICKÁ MOBILNÍ JEDNOLANOVÁ PILA NA DĚLENÍ BLOKŮ MODEL: MEM 2000 MEM-2000 lanová pila je určena k zarovnávání bloků a řezání desek. Mobilní proto, že umožňuje řezat