Momentové motory. (vestavné provedení) TGQ Momentové (přímé) motory
|
|
|
- Otto Blažek
- před 6 lety
- Počet zobrazení:
Transkript





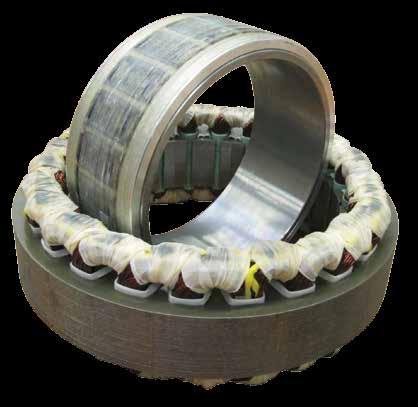

1 Momentové motory (vestavné provedení) TGQ Momentové (přímé) motory

 motory TGQ 2.")


2 Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové automatizaci. Od návrhu přes optimalizaci včetně programování zákaznických řešení, zprovoznění až po servis sahá záběr našich techniků. Servopohony a řídicí systémy firmy TG Drives se využívají v řezacích stolech, v obráběcích centrech, v automobilovém, gumárenském, potravinářském, sklářském i stavebním průmyslu. Snadné řešení každého pohybu 1. Servomotory Synchronní servomotory s permanentními magnety řady TGN, TGH, TGS a TGT Momentové (přímé) motory TGQ 2. Servozesilovače Digitální servozesilovače AKD Digitální servozesilovače TGA300 Digitální servozesilovače S400, S600 a S700 Tří-osé digitální servozesilovače TGP Digitální servozesilovače TGA-24 a TGA-48 Digitální servozesilovače TGZ 3. Přesné mechanické systémy Lineární aktuátory firmy EXLAR Přesné rotační aktuátory DRIVESPIN Cykloidní převodovky TWINSPIN Přesné planetové převodovky 4. Řídicí systém TG Motion Univerzální softwarový řídící systém obsahující funkce pohybu jednoosého, víceosého a souvislého řízení 5. Průmyslové počítače a operátorské panely Panelové a standardní průmyslové počítače firmy ASEM Operátorské panely firmy ASEM a ESA Naše služby Návrh a optimalizace pohonů Návrh řídicího systému Programování Zprovoznění Záruční a pozáruční servis TG Drives, s. r. o. Olomoucká č. ev. 84 CZ Brno Tel.: Fax: info@tgdrives.cz

 Velikost motoru (0-7) Klidový moment (4200=42Nm) Napětí stejnosměrného obvodu (320, 560V) Jmenovité otáčky (10=1000min -1 ) Typ tepelné ochrany")
3 Momentové motory Momentové (přímé) motory TGQ Momentové motory (též přímé či prstencové motory) v angličtině torque nebo direct motory řady TGQ se vyznačují velkým krouticím momentem, vysokým počtem pólů, velkým průměrem a malou šířkou. Momentové motory TGQ jsou určeny především pro přímou zástavbu do strojů, kde je požadována vysoká přesnost, dynamika a tuhost. Aplikace momentových motorů snižují nutnost použití nebo zcela nahrazují další mechanické převody ve strojích. Příklad značení /T0 Typ motoru (typ vinutí) Velikost motoru (0-7) Klidový moment (4200=42Nm) Napětí stejnosměrného obvodu (320, 560V) Jmenovité otáčky (10=1000min -1 ) Typ tepelné ochrany (T0 termokontakt, T1 PTC111-K13, T3 KTY83-110, T4 KTY84-130) Technická data Momentové motory TGQ se vyrábějí pro různá napětí stejnosměrného meziobvodu a na různé jmenovité otáčky. V tabulkách jsou uvedeny motory s napětím stejnosměrného meziobvodu 320V a 560V. Na požádání Vám poskytneme technické parametry motorů navržených na jiná napětí nebo jiné otáčky. Momentové motory TGQ jsou v současné době dostupné v 7 velikostech osové výšky (TGQ7) a jsou standardně nabízeny ve vestavném provedení (stator a rotor zvlášť). Motory umožňují rovněž konstrukční provedení s dutou hřídelí (hollow shaft). Vestavné provedení motorů může být na přání doplněno o Hallovy sondy, případně je možné nabídnout komplexní dodávku motoru včetně přírub, brzdy a zpětnovazebních snímačů. 11
4 Momentové charakteristiky Momentové charakteristiky znázorňují závislost krouticího momentu na otáčkách servomotoru. Níže je uveden přehled základních veličin, kterými je tato závislost dána: M 0 Klidový moment (Nm) je maximální krouticí moment, který je motor schopen trvale generovat při zatížení rovnoměrně rozloženém ve všech třech fázích (na rozdíl od blokovacího momentu M L ). Otáčky motoru jsou blízko nuly. Klidový moment závisí na teplotě a chladících podmínkách, jeho hodnota je stanovena pro oteplení T otep = 110 C, teplotu okolí T = 20 C. M L Blokovací moment (Nm) je krouticí moment odpovídající blokovacímu proudu I L při nulových otáčkách, kterým lze motor zatížit po neomezenou dobu. To má za následek nerovnoměrné rozložení zatížení v jednotlivých fázích. Hodnota blokovacího momentu je stanovena pro oteplení T otep = 110 C, teplotu okolí T = 20 C. n N Jmenovité otáčky (min 1 ) jsou otáčky ve zvoleném pracovním bodě, ve kterém motor vytváří jmenovitý krouticí moment M N. M N Jmenovitý moment (Nm) je krouticí moment (odvozený od M 0 ) působící na hřídel motoru po neomezenou dobu (trvalý chod, zatížení S1) při jmenovitých otáčkách n N. Jmenovitý moment závisí na teplotě a chladících podmínkách, jeho hodnota je stanovena pro oteplení T otep = 110 C, teplotu okolí T = 20 C. Pro splnění udávaných hodnot je nutné zajistit dostatečný odvod tepla přes přední přírubu strana příruby pro montáž motoru musí být alespoň 2,5násobkem strany kostry motoru (3,5násobkem pro motory vel. 2) nebo teplota této plochy musí být po celou dobu chodu menší než 65 C. n o Max. speed (min 1 ) jsou maximální dovolené otáčky rotoru bez zátěže. M max Peak torque (Nm) je maximální krouticí moment, který je motor schopen generovat, tento moment je dosažen při I max. Proudem I max je možné zatížit motor pouze při takové teplotě magnetů rotoru, při které ještě nedojde k jeho demagnetizaci. Maximální přípustná doba pro použití špičkového proudu závisí na počáteční teplotě vinutí, obvykle však tato hodnota není vyšší než několik sekund. Hodnota maximálního momentu je obvykle trojnásobek hodnoty klidového momentu M 0 a je stanovena pro teplotu magnetů max. 80 C (nebezpečí demagnetizace). M x Maximální moment (Nm) je maximální krouticí moment, který je motor schopen generovat při jmenovitých otáčkách motoru n N. Hodnota momentu M x je obvykle dvojnásobek hodnoty jmenovitého krouticího momentu motoru M N. Všechny výše uvedené hodnoty napětí a proudů (není-li uvedeno jinak) odpovídají efektivním hodnotám (RMS). M max Kroutící moment [Nm] M 0 M x M n 0 n N n 0 Otáčky motoru [min -1 ] Momentové křivky standardních servomotorů jsou volně ke stažení na
5 Momentové motory Momentové motory TGQ1 2,25 8,5 Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm 2,25 3,75 5,15 7,0 8,5 2,25 3,75 5,15 7 8,5 Klidový proud I 0 A 2,6 2,1 3,9 5,3 6,3 1,58 2,6 2,4 3,2 3,1 Jmenovitý moment M N Nm 2,1 3,4 4,6 6,1 7,4 1,9 3,0 4,6 6,1 7,4 Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 2,56 2,07 3,6 4,7 5,6 1,37 2,2 2,2 2,98 2,89 Maximální moment M max Nm , , Maximální proud I max A , ,9 13,2 12, Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 0,88 1,76 1,32 1,32 1,34 1,42 1,42 2,1 2,20 2,75 Napěťová konstanta K E V/1000 rpm 53,2 106,4 80,0 80,0 81,0 86,0 86, Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 6,2 10,15 3,5 2,5 1,99 15,9 6,5 9,0 7,05 8,6 Indukčnost dvě fáze L 2Ph mh 10,3 20,6 7,7 5,8 4,8 26,6 13,3 20,0 16,1 20,1 Moment setrvačnosti J kg cm 2 0,85 1,7 2,55 3,4 4,25 0,85 1,7 2,55 3,4 4,25 Hmotnost m kg 0,75 1,4 2,05 2,7 3,35 0,75 1,4 2,05 2,7 3,35 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 10 mm 12 mm 76 mm 55 mm 79 mm 53,6 mm 51,8 mm 42 mm 50 mm mm 10 mm 12 mm 76 mm 55 mm 79 mm 53,6 mm 51,8 mm 42 mm 80 mm mm 10 mm 12 mm 76 mm 55 mm 79 mm 53,6 mm 51,8 mm 42 mm 110 mm mm 10 mm 12 mm 76 mm 55 mm 79 mm 53,6 mm 51,8 mm 42 mm 140 mm mm 10 mm 12 mm 76 mm 55 mm 79 mm 53,6 mm 51,8 mm 42 mm 170 mm 2 31
6 Momentové motory TGQ2 6,5 25,5 Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm 6, ,5 6, ,5 Klidový proud I 0 A 4,5 8,3 11,7 11,4 17,5 3,2 5,2 5,6 8,3 11,6 Jmenovitý moment M N Nm 5,8 8 10,2 13,5 10,3 5,2 8 12,5 10,5 16 Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 4,7 5,8 7,4 8,8 10,3 2,7 4,3 4,3 4,7 8,7 Maximální moment M max Nm Maximální proud I max A , Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 1,44 1,44 1,46 1,75 1,46 2,0 2,3 3,01 2,4 2,2 Napěťová konstanta K E V/1000 rpm Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 2,5 0,96 0,59 0,64 0,32 4,8 2,4 2,6 1,15 0,78 Indukčnost dvě fáze L 2Ph mh 5,5 2,8 1,9 2,1 1, ,8 8,2 3,9 2,7 Moment setrvačnosti J kg cm 2 6,1 12,2 18,3 24,4 30,5 6,1 12,2 18,3 24,4 30,5 Hmotnost m kg 1,95 3,65 5,35 7,05 8,75 1,95 3,65 5,35 7,05 8,75 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 9 mm 15 mm 116 mm 90 mm 120 mm 88 mm 86,5 mm 72 mm 50 mm mm 9 mm 15 mm 116 mm 90 mm 120 mm 88 mm 86,5 mm 72 mm 80 mm mm 9 mm 15 mm 116 mm 90 mm 120 mm 88 mm 86,5 mm 72 mm 110 mm mm 9 mm 15 mm 116 mm 90 mm 120 mm 88 mm 86,5 mm 72 mm 140 mm mm 9 mm 15 mm 116 mm 90 mm 120 mm 88 mm 86,5 mm 72 mm 170 mm
7 Momentové motory Momentové motory TGQ3 9,5 42 Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm 9, ,5 42 9, ,5 42 Klidový proud I 0 A 6,4 6,1 9,5 11,7 16,3 2,6 4,3 5,9 7,8 11,4 Jmenovitý moment M N Nm 8, , Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 6,3 5,6 8 10,2 13,4 2,3 3,7 5 6,4 9,9 Maximální moment M max Nm Maximální proud I max A , Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 1,48 2,96 2,73 2,96 2,6 3,7 4,2 4,4 4,4 3,7 Napěťová konstanta K E V/1000 rpm 89, ,7 Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 1,39 2,09 1,07 0,88 0,52 8,7 4,3 2,8 1,94 1,05 Indukčnost dvě fáze L 2Ph mh 4,25 8,5 4,8 4,25 2,6 26,9 17,4 12,7 9,6 5,31 Moment setrvačnosti J kg cm Hmotnost m kg 2,73 5,1 7,45 9,8 12,2 2,73 5,1 7,45 9,8 12,2 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 9 mm 16 mm 136 mm 106 mm 150 mm 104 mm 102,6 mm 86 mm 50 mm mm 9 mm 16 mm 136 mm 106 mm 150 mm 104 mm 102,6 mm 86 mm 80 mm mm 9 mm 16 mm 136 mm 106 mm 150 mm 104 mm 102,6 mm 86 mm 110 mm mm 9 mm 16 mm 136 mm 106 mm 150 mm 104 mm 102,6 mm 86 mm 140 mm mm 9 mm 16 mm 136 mm 106 mm 150 mm 104 mm 102,6 mm 86 mm 170 mm 4 51
8 Momentové motory TGQ4 14,5 68 Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm 14, , Klidový proud I 0 A 5,9 9, ,6 24,9 6,8 7,6 10,2 12,6 18,4 Jmenovitý moment M N Nm 12,8 22,6 31,6 39,8 47,3 11,2 22,6 31,6 39,8 47,3 Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 5,4 8,8 12,6 15,4 18,3 6,1 6,2 8,1 9,6 14,6 Maximální moment M max Nm , Maximální proud I max A Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 2,5 2,96 2,6 2,96 2,7 2,13 3,8 4,10 4,4 3,70 Napěťová konstanta K E V/1000 rpm ,7 Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 1,87 2,09 0,46 0,88 0,26 1,43 1,64 1,11 0,88 1,05 Indukčnost dvě fáze L 2Ph mh 11,6 8,35 4,4 4,17 2,9 8, ,7 9,1 5,22 Moment setrvačnosti J kg cm 2 24,9 49,8 74,7 99,6 124,5 24,9 49,8 74,7 99,6 124,5 Hmotnost m kg 3, ,3 13,5 16,8 3, ,3 13,5 16,8 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 15 mm 17 mm 170 mm 128 mm 180 mm 126 mm 124,8 mm 106 mm 50 mm mm 15 mm 17 mm 170 mm 128 mm 180 mm 126 mm 124,8 mm 106 mm 80 mm mm 15 mm 17 mm 170 mm 128 mm 180 mm 126 mm 124,8 mm 106 mm 110 mm mm 15 mm 17 mm 170 mm 128 mm 180 mm 126 mm 124,8 mm 106 mm 140 mm mm 15 mm 17 mm 170 mm 128 mm 180 mm 126 mm 124,8 mm 106 mm 170 mm
9 Momentové motory Momentové motory TGQ Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm 28 54, , Klidový proud I 0 A 9,6 15,5 19,8 25,8 31,8 6,0 9,3 12,2 15,9 19,7 Jmenovitý moment M N Nm 17,3 34,1 52,2 65,4 78,1 17,3 34,1 52,2 65,4 78,1 Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 6,4 10,4 13,6 16,8 19,8 4,0 6,2 8,4 10,3 12,3 Maximální moment M max Nm Maximální proud I max A Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 2,9 3,5 4,1 4,2 4,2 4,66 5,84 6,62 6,75 6,81 Napěťová konstanta K E V/1000 rpm Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 1,06 0,56 0,46 0,32 0,25 2,7 1,55 1,18 0,84 0,67 Indukčnost dvě fáze L 2Ph mh 2,5 1,82 1,65 1,28 1,05 6,5 5,1 4,3 3,4 2,8 Moment setrvačnosti J kg cm 2 91, , Hmotnost m kg 5 8,6 12,2 15,8 19,4 5 8,6 12,2 15,8 19,4 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 16 mm 22 mm 206 mm 172 mm 210 mm 170 mm 168,6 mm 148 mm 50 mm mm 16 mm 22 mm 206 mm 172 mm 210 mm 170 mm 168,6 mm 148 mm 80 mm mm 16 mm 22 mm 206 mm 172 mm 210 mm 170 mm 168,6 mm 148 mm 110 mm mm 16 mm 22 mm 206 mm 172 mm 210 mm 170 mm 168,6 mm 148 mm 140 mm mm 16 mm 22 mm 206 mm 172 mm 210 mm 170 mm 168,6 mm 148 mm 170 mm 6 71
10 Momentové motory TGQ Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm Klidový proud I 0 A 14 38, ,7 86 8,5 13,2 17,9 19,1 21,2 Jmenovitý moment M N Nm 49, Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 13,5 34,2 47,5 74,2 91,8 6,3 9,3 11,5 13,7 14,9 Maximální moment M max Nm Maximální proud I max A Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 4, ,7 9,2 11,1 12,2 Napěťová konstanta K E V/1000 rpm 259,5 181,4 181,4 181,4 181, Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 0,555 0,103 0,06 0,042 0,032 1,52 0,85 0,57 0,58 0,54 Indukčnost dvě fáze L 2Ph mh 3,48 0,85 0,57 0,43 0,34 9,3 7,1 5,4 5,8 5,6 Moment setrvačnosti J kg cm Hmotnost m kg 7,83 13, ,1 7,83 13, ,1 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 17 mm 26 mm 285 mm 242 mm 290 mm 238 mm 237 mm 210 mm 50 mm mm 17 mm 26 mm 285 mm 242 mm 290 mm 238 mm 237 mm 210 mm 80 mm mm 17 mm 26 mm 285 mm 242 mm 290 mm 238 mm 237 mm 210 mm 110 mm mm 17 mm 26 mm 285 mm 242 mm 290 mm 238 mm 237 mm 210 mm 140 mm mm 17 mm 26 mm 285 mm 242 mm 290 mm 238 mm 237 mm 210 mm 170 mm
11 Momentové motory Momentové motory TGQ Nm Magnety Nd-Fe-B 320 VDC 560 VDC Klidový moment M 0 Nm Klidový proud I 0 A 13,4 24,6 30,6 30,1 36, ,1 20,7 14,5 17,8 Jmenovitý moment M N Nm , Jmenovité otáčky n N rpm Jmenovitý výkon P N W Jmenovitý proud I N A 12,2 20,2 23,5 25,8 30,9 11,3 11,3 14,9 13,6 16,3 Maximální moment M max Nm Maximální proud I max A Max. otáčky mech. n max rpm Momentová konstanta K M Nm/A 7,8 8,1 9,5 12,6 12,8 8,72 14, ,18 26,33 Napěťová konstanta K E V/1000 rpm , Počet pólů motoru 2 p Odpor dvě fáze R 2Ph Ω 0,73 0,29 0,23 0,29 0,22 0,91 0,876 0,502 1,225 0,946 Indukčnost dvě fáze L 2Ph mh 7,1 3,8 3,5 4,6 3,8 8,8 11,57 7,55 19,8 16,03 Moment setrvačnosti J kg cm Hmotnost m kg 12,4 21,3 30, ,8 12,4 21,3 30, ,8 Rozměry L D R d R Typ Stator Rotor A B max. C max. D max. E min. F G D R, max. d R, max. L max mm 20 mm 32 mm 355 mm 300 mm 360 mm 296 mm 295 mm 265 mm 50 mm mm 20 mm 32 mm 355 mm 300 mm 360 mm 296 mm 295 mm 265 mm 80 mm mm 20 mm 32 mm 355 mm 300 mm 360 mm 296 mm 295 mm 265 mm 110 mm mm 20 mm 32 mm 355 mm 300 mm 360 mm 296 mm 295 mm 265 mm 140 mm mm 20 mm 32 mm 355 mm 300 mm 360 mm 296 mm 295 mm 265 mm 170 mm 8 91
12 Momentové charakteristiky TGQ M [Nm] n [1/min] Q Q Q Q Q TGQ M [Nm] n [1/min] Q Q Q Q Q2-2550
13 Momentové motory TGQ M [Nm] n [1/min] Q Q Q Q Q TGQ M [Nm] n [1/min] Q Q Q Q Q
14 TGQ M [Nm] n [1/min] Q Q Q Q Q TGQ M [Nm] n [1/min] Q Q Q Q Q6-2580
15 Momentové motory TGQ M [Nm] n [1/min] Q Q Q Q Q Poznámky:
16 Servomotory Servozesilovače Převodovky Řídicí systémy TG Drives, s. r. o. Olomoucká č. ev. 84 CZ Brno Tel.: Fax: /2015
Servomotory. Střídavé synchronní servomotory TGN
 Střídavé synchronní servomotory TGN Střídavé synchronní servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Střídavé synchronní servomotory TGN Střídavé synchronní servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Servopohony. Servozesilovače AKD
 Servopohony Servozesilovače AKD Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové
Servopohony Servozesilovače AKD Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové
Servopohony. Servomotory TGN
 Servopohony Servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové automatizaci.
Servopohony Servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové automatizaci.
Servomotory. Střídavé synchronní servomotory. TGT a TGH
 Servomotory Střídavé synchronní servomotory TGT a TGH omplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení
Servomotory Střídavé synchronní servomotory TGT a TGH omplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení
Servomotory. Střídavé synchronní servomotory. TGT a TGH
 Střídavé synchronní servomotory TGT a TGH Střídavé synchronní servomotory TGT omplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Střídavé synchronní servomotory TGT a TGH Střídavé synchronní servomotory TGT omplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony
Servomotory. Střídavé synchronní servomotory TGN
 Servomotory Střídavé synchronní servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení
Servomotory Střídavé synchronní servomotory TGN Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení
Planetové převodovky Rotační aktuátory
 Planetové převodovky Rotační aktuátory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové
Planetové převodovky Rotační aktuátory Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje a zařízení v průmyslové
AKD. digitální servozesilovače
 AKD digitální servozesilovače Digitální servozesilovače Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje
AKD digitální servozesilovače Digitální servozesilovače Komplexní dodávky a zprovoznění servopohonů, dodávky řídicích systémů. Česká společnost TG Drives dodává již od roku 1995 servopohony pro stroje
Servomotory. Střídavé synchronní servomotory TGT a TGH
 Servomotory Střídavé synchronní servomotory TGT a TGH Střídavé synchronní servomotory TGT Střídavé synchronní servomotory mají ve statoru rozložené trojfázové vinutí a permanentní magnety na rotoru. Vinutí
Servomotory Střídavé synchronní servomotory TGT a TGH Střídavé synchronní servomotory TGT Střídavé synchronní servomotory mají ve statoru rozložené trojfázové vinutí a permanentní magnety na rotoru. Vinutí
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK
 STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
STŘÍDAVÉ SERVOMOTORY ŘADY 5NK EM Brno s.r.o. Jílkova 124; 615 32 Brno; Česká republika www.embrno.cz POUŽITÍ Servomotory jsou určeny pro elektrické pohony s regulací otáček v rozsahu nejméně 1:1000 a s
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
TGA-24-9/20. Instrukční manuál DIGITÁLNÍ SERVOZESILOVAČ. Typy servozesilovačů
 DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 06/2012 Typy servozesilovačů TGA-24-9/20 standardní verze TGA-24-9/20-O1 s volitelným komunikačním konektorem X1 8 pólů TGA-24-9/20-O3 napájecí
DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 06/2012 Typy servozesilovačů TGA-24-9/20 standardní verze TGA-24-9/20-O1 s volitelným komunikačním konektorem X1 8 pólů TGA-24-9/20-O3 napájecí
DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20
 DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 01/2014 servotechnika Typy servozesilovačů TGA-24-9/20 TGA-24-9/20-O1 TGA-24-9/20-O3 TGA-24-9/20-O4 TGA-24-9/20-O8 standardní verze s volitelným
DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 01/2014 servotechnika Typy servozesilovačů TGA-24-9/20 TGA-24-9/20-O1 TGA-24-9/20-O3 TGA-24-9/20-O4 TGA-24-9/20-O8 standardní verze s volitelným
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20
 DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 03/2004 servotechnika Bezpečnostní instrukce Před provedením instalace si přečtěte tuto dokumentaci. Nesprávné zacházení se servozesilovačem
DIGITÁLNÍ SERVOZESILOVAČ TGA-24-9/20 Instrukční manuál Edice 03/2004 servotechnika Bezpečnostní instrukce Před provedením instalace si přečtěte tuto dokumentaci. Nesprávné zacházení se servozesilovačem
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
ST a SW High-Torque - otočné jednotky:
 ST a SW High-Torque - otočné jednotky: Otočné moduly řady ST a SW s přímým pohonem a absolutním snímačem úhlu natočení jsou přesně tím řešením, pokud je třeba rychlý, precizní, vysoce dynamický rotační
ST a SW High-Torque - otočné jednotky: Otočné moduly řady ST a SW s přímým pohonem a absolutním snímačem úhlu natočení jsou přesně tím řešením, pokud je třeba rychlý, precizní, vysoce dynamický rotační
TIA na Dosah. Přehled a novinky motorů
 TIA na Dosah Přehled a novinky motorů Produktový přehled motorů pro motion control aplikace Servomotory Servo geared motors Konvenční rotační Servomotory s motory synchronní převodovkou a asynchronní Čelní
TIA na Dosah Přehled a novinky motorů Produktový přehled motorů pro motion control aplikace Servomotory Servo geared motors Konvenční rotační Servomotory s motory synchronní převodovkou a asynchronní Čelní
Servozesilovače. Digitální servozesilovače TGA, TGP
 Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
Frekvenční měniče a servomotory Střídavé servomotory
 2. Vysoce dynamické synchronní střídavé servomotory HIWIN FR zajišťují vysoký točivý moment v celém rozsahu otáček. Protože mají minimální moment setrvačnosti, jsou také vhodné pro náročné činnosti dynamického
2. Vysoce dynamické synchronní střídavé servomotory HIWIN FR zajišťují vysoký točivý moment v celém rozsahu otáček. Protože mají minimální moment setrvačnosti, jsou také vhodné pro náročné činnosti dynamického
Pohonné systémy OS. 1.Technické principy 2.Hlavní pohonný systém
 Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
Pohonné systémy OS 1.Technické principy 2.Hlavní pohonný systém 1 Pohonný systém OS Hlavní pohonný systém Vedlejší pohonný systém Zabezpečuje hlavní řezný pohyb Rotační Přímočarý Zabezpečuje vedlejší řezný
SERVOMOTORY ŘADY TGN, TGH A TGT
 SERVOMOTORY ŘADY TGN, TGH A TGT Manuál k použití. Informace uvedené v této příručce jsou považovány za přesné a spolehlivé, avšak firma TG Drives nenese žádnou odpovědnost za jejich použití. Firma si rovněž
SERVOMOTORY ŘADY TGN, TGH A TGT Manuál k použití. Informace uvedené v této příručce jsou považovány za přesné a spolehlivé, avšak firma TG Drives nenese žádnou odpovědnost za jejich použití. Firma si rovněž
Pohony šicích strojů
 Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Pohony šicích strojů Obrázek 1:Motor šicího stroje Charakteristika Podle druhu použitého pohonu lze rozdělit šicí stroje na stroje a pohonem: ručním, nožním, elektrickým pohonem. Motor šicího stroje se
Systém bezkartáčových stejnosměrných pohonů BLDC
 Systém bezkartáčových stejnosměrných pohonů BLDC Provoz v otevřené smyčce bez zpětné vazby z halových sond a IRC čidla Provoz v uzavřené smyčce se zpětnou vazbou z magnetického čidla Použití pro jednoduché
Systém bezkartáčových stejnosměrných pohonů BLDC Provoz v otevřené smyčce bez zpětné vazby z halových sond a IRC čidla Provoz v uzavřené smyčce se zpětnou vazbou z magnetického čidla Použití pro jednoduché
F 504 F 506. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle
![F 504 F 506. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle](/thumbs/71/65512313.jpg "F 504 F 506. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle") F 54 F 56 M4 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP F 54 F 56 K (bez brzdy) K (without brake) K (ohne bremse) 78 9 K1 (s brzdou) K1 (with brake) K1 (mit bremse) 112 124
F 54 F 56 M4 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP F 54 F 56 K (bez brzdy) K (without brake) K (ohne bremse) 78 9 K1 (s brzdou) K1 (with brake) K1 (mit bremse) 112 124
Úvod. Rozdělení podle toku energie: Rozdělení podle počtu fází: Rozdělení podle konstrukce rotoru: Rozdělení podle pohybu motoru:
 Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
Indukční stroje 1 konstrukce Úvod Indukční stroj je nejpoužívanější a nejrozšířenější elektrický točivý stroj a jeho význam neustále roste (postupná náhrada stejnosměrných strojů). Rozdělení podle toku
PŘEVODOVÝ SYNCHRONNÍ MOTOR REVERZAČNÍ B 410
 REGULACE AUTOMATIZACE BOR, spol. s r.o Dělnická 264 473 01 Nový Bor tel. : +420 487 727 443 fax : +420 487 726 320 e-mail : regulace@regulace.cz http://www.regulace.cz Katalog výrobků : PŘEVODOVÉ MOTORY
REGULACE AUTOMATIZACE BOR, spol. s r.o Dělnická 264 473 01 Nový Bor tel. : +420 487 727 443 fax : +420 487 726 320 e-mail : regulace@regulace.cz http://www.regulace.cz Katalog výrobků : PŘEVODOVÉ MOTORY
TGZ. digitální servozesilovač
 TGZ digitální servozesilovač igitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené funkce,
TGZ digitální servozesilovač igitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené funkce,
Krokové motory EMMS-ST
 hlavní údaje V e od jediného dodavatele motory EMMS-ST 4 2fázová hybridní technologie volitelný integrovaný enkodér pro provoz servo lite (uzavřená smyčka) sinusový průběh proudu volitelně s brzdou stupeň
hlavní údaje V e od jediného dodavatele motory EMMS-ST 4 2fázová hybridní technologie volitelný integrovaný enkodér pro provoz servo lite (uzavřená smyčka) sinusový průběh proudu volitelně s brzdou stupeň
Servomotory a krokové motory. Charakteristika
 Servomotory a krokové motory harakteristika Pro pohon lineárních modulů se nejčastěji používají krokové motory nebo servomotory, které umožňují rychlé posuny při vysokých přesnostech polohování. Firma
Servomotory a krokové motory harakteristika Pro pohon lineárních modulů se nejčastěji používají krokové motory nebo servomotory, které umožňují rychlé posuny při vysokých přesnostech polohování. Firma
ROTAČNÍ AKTUÁTORY DRIVESPIN
 ROTAČNÍ AKTUÁTORY DRIVESPIN Manuál k použití. Informace uvedené v této příručce jsou považovány za přesné a spolehlivé, avšak firma TG Drives nenese žádnou odpovědnost za jejich použití. Firma si rovněž
ROTAČNÍ AKTUÁTORY DRIVESPIN Manuál k použití. Informace uvedené v této příručce jsou považovány za přesné a spolehlivé, avšak firma TG Drives nenese žádnou odpovědnost za jejich použití. Firma si rovněž
SYNCHRONNÍ MOMENTOVÉ MOTORY S PM øady ROL. Technický návod. EN ISO 9001:2000 / EN ISO 14001:2004 Certifikáty è. 04 100 960116, 04 104 010344
 SYNCHRONNÍ MOMENTOVÉ MOTORY S PM øady ROL Technický návod EN ISO 9001:2000 / EN ISO 14001:2004 Certifikáty è. 04 100 960116, 04 104 010344 Momentové motory řady ROL TNA 783a Strana: 2 z 16 Verze: 0 Kopie
SYNCHRONNÍ MOMENTOVÉ MOTORY S PM øady ROL Technický návod EN ISO 9001:2000 / EN ISO 14001:2004 Certifikáty è. 04 100 960116, 04 104 010344 Momentové motory řady ROL TNA 783a Strana: 2 z 16 Verze: 0 Kopie
F K (bez brzdy) K (without brake) K (ohne bremse) K1 (s brzdou) K1 (with brake) K1 (mit bremse) Brzda Brake Bremse
 K (without brake) K (ohne bremse) K1 (s brzdou) K1 (with brake) K1 (mit bremse) Brzda Brake Bremse") e W 256 W 258 M4 M5 M9 F5 63 24 F8 F 1 W4 W5 W9 ML 4 ML 5 ML 9 MA 4 TYP SERVOMOTORU MOTOR TYPE MOTORTYP W 256 W 258 K (bez brzdy) K (without brake) K (ohne bremse) 152 182 K1 (s brzdou) K1 (with brake)
e W 256 W 258 M4 M5 M9 F5 63 24 F8 F 1 W4 W5 W9 ML 4 ML 5 ML 9 MA 4 TYP SERVOMOTORU MOTOR TYPE MOTORTYP W 256 W 258 K (bez brzdy) K (without brake) K (ohne bremse) 152 182 K1 (s brzdou) K1 (with brake)
-V- novinka. Jednotky motoru MTR-DCI 2.2. motor s integrovaným ovladačem, převodovkou a řízením. kompaktní konstrukce
 Jednotky motoru MTR-DCI motor s integrovaným ovladačem, převodovkou a řízením kompaktní konstrukce ovládání prostřednictvím vstupů/výstupů stupeň krytí IP54 2006/10 změny vyhrazeny výrobky 2007 5/-1 hlavní
Jednotky motoru MTR-DCI motor s integrovaným ovladačem, převodovkou a řízením kompaktní konstrukce ovládání prostřednictvím vstupů/výstupů stupeň krytí IP54 2006/10 změny vyhrazeny výrobky 2007 5/-1 hlavní
Bezpečnostní kluzné a rozběhové lamelové spojky
 Funkce Vlastnosti, oblast použití Pokyny pro konstrukci a montáž Příklady montáže Strana 3b.03.00 3b.03.00 3b.03.00 3b.06.00 Technické údaje výrobků Kluzné lamelové spojky s tělesem s nábojem Konstrukční
Funkce Vlastnosti, oblast použití Pokyny pro konstrukci a montáž Příklady montáže Strana 3b.03.00 3b.03.00 3b.03.00 3b.06.00 Technické údaje výrobků Kluzné lamelové spojky s tělesem s nábojem Konstrukční
ML 404 ML 406 ML 408
 e M4 ML 44 ML 46 ML 48 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 ML 9 MA 4 MA 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP ML 44 ML 46 ML 48 K (bez brzdy) K (without brake) K (ohne bremse) 237 273 35 K1 (s brzdou) K1
e M4 ML 44 ML 46 ML 48 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 ML 9 MA 4 MA 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP ML 44 ML 46 ML 48 K (bez brzdy) K (without brake) K (ohne bremse) 237 273 35 K1 (s brzdou) K1
Servomotory EMME-AS. doporučené výrobky Festo zvládnou 80 % Vašich automatizačních úloh. Hledejte hvězdičky!
 q/w doporučené výrobky Festo zvládnou 80 % Vašich automatizačních úloh po celém světě: vždy skladem síla: kvalita Festo za atraktivní cenu jednoduchost: snazší nákup a skladování qpřipraveno k odeslání
q/w doporučené výrobky Festo zvládnou 80 % Vašich automatizačních úloh po celém světě: vždy skladem síla: kvalita Festo za atraktivní cenu jednoduchost: snazší nákup a skladování qpřipraveno k odeslání
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
F 804 F 806. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle
![F 804 F 806. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle](/thumbs/55/36087491.jpg "F 804 F 806. Brzda Brake Bremse. M 0 M B t 1max t 2max U 1DC n max J m MAYR. [Nm] [Nm] [ms] [ms] [V] [min -1 ] [kg.m ] [kg] Hřídel Shaft Welle") F 84 F 86 M4 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP F 84 F 86 K (bez brzdy) K (without brake) K (ohne bremse) 1 124 K1 (s brzdou) K1 (with brake) K1 (mit bremse) 135 159
F 84 F 86 M4 M5 M9 F5 F8 F 1 W4 W5 W9 ML 4 ML 5 TYP SERVOMOTORU MOTOR TYPE MOTORTYP F 84 F 86 K (bez brzdy) K (without brake) K (ohne bremse) 1 124 K1 (s brzdou) K1 (with brake) K1 (mit bremse) 135 159
REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR
 REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR Katalog výrobků : STEJNOSMĚRNÉ SERVOMOTORY HSM OBSAH 1. Všeobecné údaje 2. Stejnosměrný servomotor HSM 60 3. Stejnosměrný servomotor HSM 150 4. Stejnosměrný
REGULACE AUTOMATIZACE BOR spol. s r.o. NOVÝ BOR Katalog výrobků : STEJNOSMĚRNÉ SERVOMOTORY HSM OBSAH 1. Všeobecné údaje 2. Stejnosměrný servomotor HSM 60 3. Stejnosměrný servomotor HSM 150 4. Stejnosměrný
Doc. Ing. Stanislav Kocman, Ph.D , Ostrava
 9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
Lineární jednotky MTV s pohonem kuličkovým šroubem
 Lineární jednotky MTV s pohonem kuličkovým šroubem Charakteristika MTV Lineární jednotky (moduly) MTV s pohonem kuličkovým šroubem a integrovaným kolejnicovým vedením umožňují díky své kompaktní konstrukci
Lineární jednotky MTV s pohonem kuličkovým šroubem Charakteristika MTV Lineární jednotky (moduly) MTV s pohonem kuličkovým šroubem a integrovaným kolejnicovým vedením umožňují díky své kompaktní konstrukci
Základy elektrických pohonů, oteplování,ochlazování motorů
 Základy elektrických pohonů, oteplování,ochlazování motorů Určeno pro studenty komb. formy FMMI předmětu 452702 / 04 Elektrotechnika Zpracoval: Jan Dudek únor 2007 Elektrický pohon Definice (dle ČSN 34
Základy elektrických pohonů, oteplování,ochlazování motorů Určeno pro studenty komb. formy FMMI předmětu 452702 / 04 Elektrotechnika Zpracoval: Jan Dudek únor 2007 Elektrický pohon Definice (dle ČSN 34
KONTAKT Řízení motorů pomocí frekvenčních měničů. Autor: Bc. Pavel Elkner Vedoucí: Ing. Jindřich Fuka
 KONTAKT 2010 Řízení motorů pomocí frekvenčních měničů Autor: Bc. Pavel Elkner (elknerp@seznam.cz) Vedoucí: Ing. Jindřich Fuka (fuka@fel.cvut.cz) 1/5 Hardware Model s asynchronním motorem Modul s automatem
KONTAKT 2010 Řízení motorů pomocí frekvenčních měničů Autor: Bc. Pavel Elkner (elknerp@seznam.cz) Vedoucí: Ing. Jindřich Fuka (fuka@fel.cvut.cz) 1/5 Hardware Model s asynchronním motorem Modul s automatem
Pohony. Petr Žabka Šimon Kovář
 Pohony Petr Žabka Šimon Kovář Pohony Základní rozdělení pohonů: Elektrické Pneumatické Hydraulické Spalovací motory Design Methodology 2017 Elektrické Pohony Elektrické pohony lze dále dělit na: Asynchronní
Pohony Petr Žabka Šimon Kovář Pohony Základní rozdělení pohonů: Elektrické Pneumatické Hydraulické Spalovací motory Design Methodology 2017 Elektrické Pohony Elektrické pohony lze dále dělit na: Asynchronní
Festo manipulátor dokumentace
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STROJNÍ OBOR PŘÍSTROJOVÁ A ŘÍDÍCÍ TECHNIKA Projekt II. Festo manipulátor dokumentace (Použité prvky:mtr-ac, SEC-AC, DGE, KSK Nastavení WMEMOC) Obsah: Obsah:...
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STROJNÍ OBOR PŘÍSTROJOVÁ A ŘÍDÍCÍ TECHNIKA Projekt II. Festo manipulátor dokumentace (Použité prvky:mtr-ac, SEC-AC, DGE, KSK Nastavení WMEMOC) Obsah: Obsah:...
ServoFit planetové převodovky PHQ/ PHQA. Quattro pohony s největším výkonem v nejmenším provedení
 ServoFit planetové převodovky PHQ/ PHQA Quattro pohony s největším výkonem v nejmenším provedení Mílové kroky pro pohony obráběcích strojů V součtu inovací nepřekonatelný Velikost 7 Velikost 8 Velikost
ServoFit planetové převodovky PHQ/ PHQA Quattro pohony s největším výkonem v nejmenším provedení Mílové kroky pro pohony obráběcích strojů V součtu inovací nepřekonatelný Velikost 7 Velikost 8 Velikost
EXTRUZI. Inovativní řešení pro excelentní S SQME MOMENTOVÝM MOTOREM EXTRUDER - VSTŘIKOVÁNÍ - VYFUKOVÁNÍ
 Inovativní řešení pro excelentní EXTRUZI S SQME MOMENTOVÝM MOTOREM EXTRUDER - VSTŘIKOVÁNÍ - VYFUKOVÁNÍ Vysoký momentový výstup Nízká spotřeba energie Přímý Pohon Vysoká Kvalita Extruze Kompaktní design
Inovativní řešení pro excelentní EXTRUZI S SQME MOMENTOVÝM MOTOREM EXTRUDER - VSTŘIKOVÁNÍ - VYFUKOVÁNÍ Vysoký momentový výstup Nízká spotřeba energie Přímý Pohon Vysoká Kvalita Extruze Kompaktní design
Řízení asynchronních motorů
 Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Lineární jednotky MTJ ECO s pohonem ozubeným řemenem
 Lineární jednotky ECO s pohonem ozubeným m Charakteristika ECO Lineární jednotky (moduly) ECO nabízí cenově výhodnou, ekonomickou variantu lineárních posuvů při zachování vysokých požadavků na technické
Lineární jednotky ECO s pohonem ozubeným m Charakteristika ECO Lineární jednotky (moduly) ECO nabízí cenově výhodnou, ekonomickou variantu lineárních posuvů při zachování vysokých požadavků na technické
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
1 Duty cycle & lifetime Thomas, Florian 26th March 2012
 1 Duty cycle & lifetime Thomas, Florian 26th March 2012 ZETALIFT - výpočtový program Výběr velikosti pohonu? 2 ZETALIFT - výpočtový program / výběr motoru Užitná kategorie a pracovní cyklus jako kritéria
1 Duty cycle & lifetime Thomas, Florian 26th March 2012 ZETALIFT - výpočtový program Výběr velikosti pohonu? 2 ZETALIFT - výpočtový program / výběr motoru Užitná kategorie a pracovní cyklus jako kritéria
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
1 ČELNÍ PŘEVODOVKY VŠEOBECNÉHO UŽITÍ OBECNÝ POPIS OZNAČOVÁNÍ PŘEVODOVEK VÝBĚR VELIKOSTI PŘEVODOVKY..4
 OBSAH 1 ČELNÍ PŘEVODOVKY VŠEOBECNÉHO UŽITÍ....3 1.1 OBECNÝ POPIS... 3 1.2 OZNAČOVÁNÍ PŘEVODOVEK.3 1.3 VÝBĚR VELIKOSTI PŘEVODOVKY..4 1.3.1 Základní metodika 4 1.3.2 Hodnoty součinitele provozu SF 4 1.3.3
OBSAH 1 ČELNÍ PŘEVODOVKY VŠEOBECNÉHO UŽITÍ....3 1.1 OBECNÝ POPIS... 3 1.2 OZNAČOVÁNÍ PŘEVODOVEK.3 1.3 VÝBĚR VELIKOSTI PŘEVODOVKY..4 1.3.1 Základní metodika 4 1.3.2 Hodnoty součinitele provozu SF 4 1.3.3
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
5. října 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Lineární jednotky MTJ s pohonem ozubeným řemenem
 Lineární jednotky MTJ s pohonem ozubeným řemenem Charakteristika MTJ Lineární jednotky (moduly) MTJ s pohonem ozubeným řemenem a kompaktní konstrukcí umožňují přenášet vysoké výkony, dosahují vysokých
Lineární jednotky MTJ s pohonem ozubeným řemenem Charakteristika MTJ Lineární jednotky (moduly) MTJ s pohonem ozubeným řemenem a kompaktní konstrukcí umožňují přenášet vysoké výkony, dosahují vysokých
Lineární jednotky MTJZ s pohonem ozubeným řemenem
 Lineární jednotky MTJZ s pohonem ozubeným řemenem Charakteristika MTJZ Lineární moduly řady MTJZ jsou v první řadě určeny pro svislou zástavbu a použití jako osy Z lineárních víceosých X-Y-Z systémů. Lineární
Lineární jednotky MTJZ s pohonem ozubeným řemenem Charakteristika MTJZ Lineární moduly řady MTJZ jsou v první řadě určeny pro svislou zástavbu a použití jako osy Z lineárních víceosých X-Y-Z systémů. Lineární
Osnova kurzu. Elektrické stroje 2. Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 3
 Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Skalární řízení asynchronních motorů
 Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5. www.feeler-cnc.cz
 INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5 www.feeler-cnc.cz CNC portálová obráběcí centra řady FV FV-3214 FV-3214 O výměnu nástrojů se stará spolehlivý řetězový zásobník s výměnnou rukou
INOVACE A DOKONALOST CNC PORTÁLOVÁ OBRÁBĚCÍ CENTRA FV FV5 www.feeler-cnc.cz CNC portálová obráběcí centra řady FV FV-3214 FV-3214 O výměnu nástrojů se stará spolehlivý řetězový zásobník s výměnnou rukou
GF Machining Solutions. Mikron MILL P 800 U ST
 GF Machining Solutions Mikron MILL P 800 U ST Mikron MILL P 800 U ST Soustružení. Hrubování. Dokončování. Jediná upínací operace. Mikron MILL P 800 U ST pro simultánní soustružení je nové řešení, založené
GF Machining Solutions Mikron MILL P 800 U ST Mikron MILL P 800 U ST Soustružení. Hrubování. Dokončování. Jediná upínací operace. Mikron MILL P 800 U ST pro simultánní soustružení je nové řešení, založené
5. POLOVODIČOVÉ MĚNIČE
 5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
5. POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (střední hodnota) a u střídavých i kmitočet. Obr. 5.1. Základní dělení měničů 1 Obr. 5.2.
Spojujeme komponenty v ucelená řešení
 ELEKTROMOTORY PŘEVODOVKY LINEÁRNÍ TECHNIKA ŘÍZENÍ RAVEO s.r.o. je dynamická společnost, která nabízí komponenty i ucelená řešení v oblasti pohonné techniky. Zaměřujeme se na průmyslové aplikace, kde je
ELEKTROMOTORY PŘEVODOVKY LINEÁRNÍ TECHNIKA ŘÍZENÍ RAVEO s.r.o. je dynamická společnost, která nabízí komponenty i ucelená řešení v oblasti pohonné techniky. Zaměřujeme se na průmyslové aplikace, kde je
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
TIA na DOSAH. SIZER a CAD CREATOR
 Co je SIZER? Nástroj který podporuje uživatele již při počáteční fázi projektu hardwarových a softwarových komponent požadovaných pro automatizaci. SIZER zahrnuje návrh úplného systému pohonu s volitelnými
Co je SIZER? Nástroj který podporuje uživatele již při počáteční fázi projektu hardwarových a softwarových komponent požadovaných pro automatizaci. SIZER zahrnuje návrh úplného systému pohonu s volitelnými
MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.
![MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.](/thumbs/91/105892726.jpg "MCU 450V[T]-5X. Multifunkční pětiosé obráběcí centrum.") MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
MCU 45V[T]-5X Multifunkční pětiosé obráběcí centrum www.kovosvit.cz 2 3 MCU 45V-5X Multifunkční pětiosé obráběcí centurm www.kovosvit.cz Hlavní rysy stroje Multifunkční 5osé obráběcí centrum Kontinuální
* _0916* Technika pohonů \ Automatizace mechaniky \ Systémová integrace \ Služby. Revize. Synchronní lineární motory SL2
 Technika pohonů \ Automatizace mechaniky \ Systémová integrace \ Služby *23059451_0916* Revize Synchronní lineární motory SL2 Vydání 09/2016 23059451/CS SEW-EURODRIVE Driving the world Obsah Obsah 1 Revize...
Technika pohonů \ Automatizace mechaniky \ Systémová integrace \ Služby *23059451_0916* Revize Synchronní lineární motory SL2 Vydání 09/2016 23059451/CS SEW-EURODRIVE Driving the world Obsah Obsah 1 Revize...
Instrukce pro použití. Elektrický servopohon pro křídlové brány ULIXES
 Elektrický servopohon pro křídlové brány 1 2 Bezpečnostní upozornění Tato příručka je určena výhradně kvalifikovaným pracovníkům, nikoliv koncovým uživatelům. Úkolem osoby provádějící instalaci je vysvětlit
Elektrický servopohon pro křídlové brány 1 2 Bezpečnostní upozornění Tato příručka je určena výhradně kvalifikovaným pracovníkům, nikoliv koncovým uživatelům. Úkolem osoby provádějící instalaci je vysvětlit
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Dodávka systému pro pokročilé řízení pohybu a pětiosé obrábění pro projekt NTIS
 Dodávka systému pro pokročilé řízení pohybu a pětiosé obrábění pro projekt NTIS Název veřejné zakázky: část 1 veřejné zakázky: Dodávka obráběcího stroje pro pětiosé frézování část 2 veřejné zakázky: Dodávka
Dodávka systému pro pokročilé řízení pohybu a pětiosé obrábění pro projekt NTIS Název veřejné zakázky: část 1 veřejné zakázky: Dodávka obráběcího stroje pro pětiosé frézování část 2 veřejné zakázky: Dodávka
3. Mechanická převodná ústrojí
 1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.3 Výzkum metod pro simulaci zatížení dílů převodů automobilů 3.3.1 Realizace modelu jízdy osobního vozidla a uložení hnacího agregátu
1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.3 Výzkum metod pro simulaci zatížení dílů převodů automobilů 3.3.1 Realizace modelu jízdy osobního vozidla a uložení hnacího agregátu
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
i Lineární moduly MRJ se dodávají pouze s dlouhými vozíky. Lineární modul MRJ s pohonem ozubeným řemenem 03 > Lineární jednotky serie MRJ
 Příslušenství Lineární jednotky Lineární modul MRJ s pohonem ozubeným řemenem 1. hnací příruba s řemenicí 2. krycí pásek (těsnící pásek) z korozivzdorné ocele 3. polyuretanový ozubený řemen AT s ocelovým
Příslušenství Lineární jednotky Lineární modul MRJ s pohonem ozubeným řemenem 1. hnací příruba s řemenicí 2. krycí pásek (těsnící pásek) z korozivzdorné ocele 3. polyuretanový ozubený řemen AT s ocelovým
rám klece lanového výtahu dno šachty
 VÝTAHY Výtahy slouží k dopravě osob nebo nákladu ve svislém popřípadě šikmém směru. Klec, kabina nebo plošina se pohybuje po dráze přesně vymezené pevnými vodítky. Druhy dle pohonu - elektrické - lanové,
VÝTAHY Výtahy slouží k dopravě osob nebo nákladu ve svislém popřípadě šikmém směru. Klec, kabina nebo plošina se pohybuje po dráze přesně vymezené pevnými vodítky. Druhy dle pohonu - elektrické - lanové,
Moderní trakční pohony Ladislav Sobotka
 Moderní trakční pohony Ladislav Sobotka ŠKODA ELECTRIC a.s. Trakční pohon pro 100% nízkopodlažní tramvaje ŠKODA Modulární konstrukce 100% nízká podlaha Plně otočné podvozky Individuální pohon každého kola
Moderní trakční pohony Ladislav Sobotka ŠKODA ELECTRIC a.s. Trakční pohon pro 100% nízkopodlažní tramvaje ŠKODA Modulární konstrukce 100% nízká podlaha Plně otočné podvozky Individuální pohon každého kola
Středoškolská technika 2019 PRACOVIŠTĚ SERVOPOHONŮ S ŘÍDICÍM SYSTÉMEM - SERVOMOTORY
 Středoškolská technika 2019 Setkání a prezentace prací středoškolských studentů na ČVUT PRACOVIŠTĚ SERVOPOHONŮ S ŘÍDICÍM SYSTÉMEM - SERVOMOTORY Petr Barteček Střední průmyslová škola Brno, Purkyňova Purkyňova
Středoškolská technika 2019 Setkání a prezentace prací středoškolských studentů na ČVUT PRACOVIŠTĚ SERVOPOHONŮ S ŘÍDICÍM SYSTÉMEM - SERVOMOTORY Petr Barteček Střední průmyslová škola Brno, Purkyňova Purkyňova
TMV 850 / TMV 1050 CNC vertikální obráběcí centrum
 TMV 850 / TMV 1050 CNC vertikální obráběcí centrum - Určeno pro vysokorychlostní vrtání, frézování a řezání závitů - Rychlá výměna nástroje 3 sec, s řezu do řezu 4,7 sec - Ergonomický design a komfortní
TMV 850 / TMV 1050 CNC vertikální obráběcí centrum - Určeno pro vysokorychlostní vrtání, frézování a řezání závitů - Rychlá výměna nástroje 3 sec, s řezu do řezu 4,7 sec - Ergonomický design a komfortní
Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter
 Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter Prof. Ing. Karel Sokanský, CSc. VŠB TU Ostrava, FEI.Teoretický úvod Z rozboru frekvenčních spekter různých veličin generovaných
Diagnostika vybraných poruch asynchronních motorů pomocí proudových spekter Prof. Ing. Karel Sokanský, CSc. VŠB TU Ostrava, FEI.Teoretický úvod Z rozboru frekvenčních spekter různých veličin generovaných
Systémy s jedním pohonem
 Všeobecné údaje Systém s jedním pohonem (YXCS) je modul pohonu (EHM ) pro libovolný pohyb v jedné ose. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost a robustní konstrukce
Všeobecné údaje Systém s jedním pohonem (YXCS) je modul pohonu (EHM ) pro libovolný pohyb v jedné ose. ideálně se hodí pro dlouhé zdvihy v portálech a velké zátěže velká mechanická tuhost a robustní konstrukce
Rotační snímače polohy Inkrementální rotační snímač RI-10S6C-2B2048-H1181
 upínací příruba, Ø 58 mm hřídel, Ø 6 x 10 mm optický měřicí princip materiál hřídele: nerez ocel stupeň krytí IP67 ze strany hřídele -40 +85 max. 6000 ot./ min (při trvalém provozu 3000) 10 30 VDC připojení
upínací příruba, Ø 58 mm hřídel, Ø 6 x 10 mm optický měřicí princip materiál hřídele: nerez ocel stupeň krytí IP67 ze strany hřídele -40 +85 max. 6000 ot./ min (při trvalém provozu 3000) 10 30 VDC připojení
Tiskové chyby vyhrazeny. Obrázky mají informativní charakter.
 MTJZ Lineární jednotky MTJZ s pohonem ozubeným řemenem Charakteristika Lineární moduly řady MTJZ jsou v první řadě určeny pro svislou zástavbu a použití jako osy Z lineárních víceosých X-Y-Z systémů. Lineární
MTJZ Lineární jednotky MTJZ s pohonem ozubeným řemenem Charakteristika Lineární moduly řady MTJZ jsou v první řadě určeny pro svislou zástavbu a použití jako osy Z lineárních víceosých X-Y-Z systémů. Lineární
MS - polovodičové měniče POLOVODIČOVÉ MĚNIČE
 POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (u stejnosměrných střední hodnota) a u střídavých efektivní hodnota napětí a kmitočet. Obr.
POLOVODIČOVÉ MĚNIČE Měniče mění parametry elektrické energie (vstupní na výstupní). Myslí se tím zejména napětí (u stejnosměrných střední hodnota) a u střídavých efektivní hodnota napětí a kmitočet. Obr.
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Tiskové chyby vyhrazeny. Obrázky mají informativní charakter.
 CTJ Lineární moduly CTJ Charakteristika Lineární jednotky (moduly) řady CTJ jsou moduly s pohonem ozubeným řemenem a se dvěma paralelními kolejnicovými vedeními. Kompaktní konstrukce lineárních jednotek
CTJ Lineární moduly CTJ Charakteristika Lineární jednotky (moduly) řady CTJ jsou moduly s pohonem ozubeným řemenem a se dvěma paralelními kolejnicovými vedeními. Kompaktní konstrukce lineárních jednotek
Základy elektrotechniky
 Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
Základy elektrotechniky Přednáška Asynchronní motory 1 Elektrické stroje Elektrické stroje jsou vždy měniče energie jejichž rozdělení a provedení je závislé na: druhu použitého proudu a výstupní formě
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II. Vítězslav Stýskala, Jan Dudek únor Elektrické stroje
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Určeno pro studenty kombinované formy FS, předmětu Elektrotechnika II Vítězslav Stýskala, Jan Dudek únor 2007 Elektrické stroje jsou zařízení, která
Elektroenergetika 1. Elektrické části elektrárenských bloků
 Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny - zprostředkování spojení alternátoru s elektrizační soustavou
Elektrické části elektrárenských bloků Elektrická část elektrárny Hlavním úkolem elektrické části elektráren je: Vyvedení výkonu z elektrárny - zprostředkování spojení alternátoru s elektrizační soustavou
Synchronní stroje 1FC4
 Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
Synchronní stroje 1FC4 Typové označování generátorů 1F. 4... -..... -. Točivý elektrický stroj 1 Synchronní stroj F Základní provedení C Provedení s vodním chladičem J Osová výška 560 mm 56 630 mm 63 710
ELEKTRICKÉ STROJE ÚVOD
 ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
ELEKTRICKÉ STROJE ÚVOD URČENO PRO STUDENTY BAKALÁŘSKÝCH STUDIJNÍCH PROGRAMŮ NA FBI OBSAH: 1. Úvod teoretický rozbor dějů 2. Elektrické stroje točivé (EST) 3. Provedení a označování elektrických strojů
VRM. říjen Servopohon pro směšovací ventily s rotačním šoupátkem pro ovládací signál 0 až 10 V KATALOGOVÝ LIST
 říjen 2000 VRM Servopohon pro směšovací ventily s rotačním šoupátkem pro ovládací signál 0 až 10 V KATALOGOVÝ LIST Hlavní rysy Ochrana proti přetížení a zablokování Bezúdržbové provedení Přehledný indikátor
říjen 2000 VRM Servopohon pro směšovací ventily s rotačním šoupátkem pro ovládací signál 0 až 10 V KATALOGOVÝ LIST Hlavní rysy Ochrana proti přetížení a zablokování Bezúdržbové provedení Přehledný indikátor
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2012 1.1.2 HLAVNÍ ČÁSTI ELEKTRICKÝCH STROJŮ 1. ELEKTRICKÉ STROJE Elektrický stroj je definován jako elektrické zařízení, které využívá ke své činnosti elektromagnetickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2012 1.1.2 HLAVNÍ ČÁSTI ELEKTRICKÝCH STROJŮ 1. ELEKTRICKÉ STROJE Elektrický stroj je definován jako elektrické zařízení, které využívá ke své činnosti elektromagnetickou
HLC série. horizontální soustruhy
 HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
HLC série horizontální soustruhy Soustruhy HLC Jsou nabízeny ve 3 provedeních s oběžným průměrem nad ložem od 900 do 2 000 mm. Délka obrobku může být až 12 metrů. Lože soustruhů jsou robustní konstrukce,
Speciální stroje. Krokový motor. Krokový motor. Krokový motor Lineární motor Selsyny Stejnosměrné EC motory
 Speciální stroje Krokový motor Lineární motor Selsyny Stejnosměrné EC motory P1 Krokový motor vykonává funkční pohyb nespojitě po stupních které se nazývají krokem Rotor z permanentního magnetu zaujme
Speciální stroje Krokový motor Lineární motor Selsyny Stejnosměrné EC motory P1 Krokový motor vykonává funkční pohyb nespojitě po stupních které se nazývají krokem Rotor z permanentního magnetu zaujme