Převodníky fyzikálních veličin (KKY/PFV)
|
|
|
- Miloslav Havlíček
- před 9 lety
- Počet zobrazení:
Transkript
1 Fakulta aplikovaných věd Katedra kybernetiky Převodníky fyzikálních veličin (KKY/PFV) 1. semestrální práce Měření statických charakteristik snímačů a soustav pro účely regulace Jméno, Příjmení Ivan Pirner, Lukáš Pittr Rok 2008/2009

2 Úloha č. 1 : MĚŘENÍ STATICKÝCH CHARAKTERISTIK SNÍMAČŮ A SOUSTAV 1. Elektromechanická soustava pružné hřídele se setrvačníkem (optické inkrementální snímače). 2. Elektromechanická soustava pružného pásu s napínací kladkou (laserový poziční a indukční snímač polohy). 3. Elektromechanická soustava vozíku s kyvadlem (magnetostrikční a optický snímač polohy). 4. Indukční snímač vzdálenosti. 5. Ultrazvukový snímač vzdálenosti. 6. Platinový a polovodičový snímač teploty ve vodní lázni. Zadání: a) Seznamte se s měřenými objekty a jejich propojení s počítačem. V prostředí Matlab+Simulink+RT-toolbox vytvořte blokový model pro snímání a vizualizaci měřených dat pomocí převodníkové karty. Zjistěte katalogové údaje převodních funkcí nebo konstant pro snímače a akční členy měřených objektů a z nich určete převodní funkce zobrazení strojových jednotek snímaných veličin na původní fyzikální jednotky. b) U soustavy (1) a (2) proveďte kompenzaci klidového offsetu akčního členu s výkonovým budičem tak, že najdete klidovou hodnotu výstupu jako střed pásma necitlivosti. (Zobrazení hodnot snímače polohy hřídele pomocí bloku SCOPE, Buzení blokem SINWAVE(ampl=0.3, frekv=2*pi), simulation time=10s). c) U soustavy (1) proveďte korekci převodních katalogových konstant. (Zobrazení hodnot snímačů polohy hřídele pomocí bloků DISPLAY, Buzení blokem SINWAVE(ampl=0), simulation time=infinity + manuálně otočit 10x setrvačníkem na rysku). *Pozor, při spuštění simulace dojde k odskoku, nutno odečíst počáteční hodnotu nebo dočasně odpojit motor. d) U soustavy (1) změřte vůli převodovky, tj. nelinearitu hřídele mezi snímačem na motoru a na setrvačníku. Vůli odměřte z grafu jako tloušťku hysterezí křivky ve vertikálním směru. (Zobrazení hodnot snímačů polohy hřídele pomocí bloku WORKSPACE, Buzení blokem SINWAVE(ampl=0.02, freq=pi/2), simulation time=8s). e) U soustavy (2) proveďte ocejchování referenčního laserového PSD snímače ve dvou mezních vzdálenostech pomocí posuvného měřítka. Za předpokladu linearity spočtěte z naměřených fyzikálních a strojových jednotek převodní konstantu. U snímače (6) určete převodní funkci referenčního platinového snímače PTP55 pomocí údaje na štítku. (Zobrazení hodnot pomocí bloku DISPLAY), simulation time=inf). f) Změřte statickou převodní charakteristiku testovaných soustav a snímačů vůči referenčním metodou průběžného měření pomalu se měnících, nebo po částech ustálených pracovních podmínek v doporučeném rozsahu tak, aby se neprojevily její dynamické vlastnosti. Změřte v obou směrech změny fyzikální veličiny (tam i zpět). Průběh charakteristiky aproximujte pomocí přímky, příp. vhodným polynomem a vyjádřete analyticky. Pro nelineární snímače určete linearizační převodní charakteristiku, příp. pásmo linearity. U soustavy (1) použijte (Zobrazení hodnot snímačů rychlosti hřídele pomocí bloku WORKSPACE, Buzení blokem SINWAVE(ampl=1, freq=pi/60), simulation time=240s). U soustavy (2) použijte pro charakteristiku samotných snímačů (Zobrazení hodnot polohy kladky pomocí bloku WORKSPACE, Buzení ručně posouvat napínací kladku plynule v celém rozsahu, simulation time=inf), pro charakteristiku celé soustavy (Zobrazení hodnot polohy kladky pomocí bloku WORKSPACE, Buzení blokem SINWAVE(ampl=0.2, freq=pi/30), simulation time=120s). U soustavy (3) použijte pro charakteristiku samotných snímačů (Zobrazení hodnot polohy vozíku pomocí bloku WORKSPACE, Buzení ručně posouvat vozík v rozsahu 0-100cm podle referenčního měřítka, simulation time=inf), pro charakteristiku akční části soustavy

3 (Zobrazení hodnot pomocí bloku WORKSPACE, blokem SINWAVE(ampl=1, freq=pi/60), simulation time=240s). U snímače (4) použijte (Zobrazení hodnot pomocí bloku DISPLAY, Buzení ručně posouvat snímač po 5mm v rozsahu 15-40mm od feromagnetické plochy podle referenčního měřítka, simulation time=inf). U snímače (5) použijte (Zobrazení hodnot pomocí bloku DISPLAY, Buzení ručně posouvat snímač po 20cm v rozsahu 2-3m od odrazné plochy podle referenčního měřítka, simulation time=inf). U snímače (6) použijte (Zobrazení hodnot pomocí bloku WORKSPACE, Buzení ručně připravit vodní lázeň 90 C a nechat volně zchladnout, simulation time=inf). g) U všech snímačů mimo inkrementálních stanovte chybu opakovatelnosti měření statistickým vyhodnocením většího počtu (řádově 1000) hodnot získaných za stejných podmínek. Měření proveďte pro dva extrémní případy pracovních podmínek (např. bez a při zatížení budičů akčních členů). Předpokládejte gaussovské rozdělení pravděpodobnosti měřené veličiny a stanovte jeho střední hodnotu a rozptyl. Určete absolutní a relativní chybu opakovatelnosti měření se spolehlivostí 95%. h) Naměřené výsledky zpracujte přehledně graficky a zhodnoťte, včetně uvedení pracovních podmínek a simulačního schéma, příp. elektrického zapojení. Pro objekty (1) až (3) zobrazte a vyhodnoťte statickou charakteristiku spojitě, pro ostatní bodově a proložte aproximovanou přímkou nebo křivkou. Poznámky: a) Vytvořte si knihovnu blokových schémat pro měření úloh pomocí RT-toolboxu v Simulinku. Použijte a nakonfigurujte blok převodníkové karty Adapter, nastavte jeho správný typ, HW adresu, citlivost analogových vstupů, příp. maximální frekvenci impulsních vstupů. U jednotlivých RT vstupů a výstupů nastavte periodu vzorkování 0.1s a správné číslo kanálu. Nastavte simulační parametr solver options na fixed-step a discrette. b) Statická převodní charakteristika soustav je zobrazení hodnot měřených fyzikálních veličin považovaných za výstup soustavy v závislosti na hodnotách vstupu (buzení) v ustáleném stavu, tj. ideálně za konstantních podmínek. U samostatných snímačů se jedná o převodní funkci mezi výstupní měřenou hodnotou a referenčním vstupem. Pokud má soustava astatismus, je třeba jej nejprve odstranit pomocí derivace. Na soustavě (1) to tedy bude jednak závislost skutečné polohy otočení hřídele na strojových jednotkách zobrazených v počítači a dále závislost úhlové rychlosti otáčení hřídele ve všech měřených pozicích na relativním buzení v rozsahu <-1..+1>. U ostatních objektů to bude závislost výsledné změřené hodnoty na skutečné nastavené poloze ověřené referenčním měřidlem. c) Všechny naměřené údaje zaznamenávejte automaticky do workspace, ze kterého je pak následně vyhodnotíte. Přímé zobrazení na displeji a v grafu použijte pouze pro počáteční zjištění parametrů a ověření funkce měřicího řetězce. V průběhu experimentu již nepoužívejte přímé grafické výstupy a nespouštějte v počítači další procesy. Neposouvejte okénka a nejlépe ani nehýbejte myší!!! Před ukončením simulace uveďte soustavu do klidového stavu.
 použijte (Zobrazení hodnot pomocí bloku WORKSPACE, Buzení ručně připravit vodní lázeň 90 C a nechat volně zchladnout, simulation time=inf).")
4 1. Elektromechanická soustava hřídele se setrvačníkem Blokové schéma měřené soustavy: Schéma měření v simulinku: Kompenzace klidového offsetu Nejdříve jsme experimentálně nastavili kompenzační konstantu na velikost -0,016V. Poté jsme provedli kompenzaci klidového offsetu. Soustavu jsme budili sinusovým signálem s amplitudou 0,3 a frekvencí 2*pi. Korekce převodních katalogových konstant Desetkrát jsme ručně otočili setrvačníkem a odečetli hodnoty z inkrementálních snímačů. Snímač hřídele 10/9,86=1,0138 Snímač setrvačníku 10/10,04=0,996 Vůle převodníku Vůle převodníku mezi snímačem na motoru a snímačem na setrvačníku. Ze šířky histerézní křivky jsme určili velikost vůle. 0,04-0,038=0,002 otáčky, tj, 0,72

5 Vůle převodovky

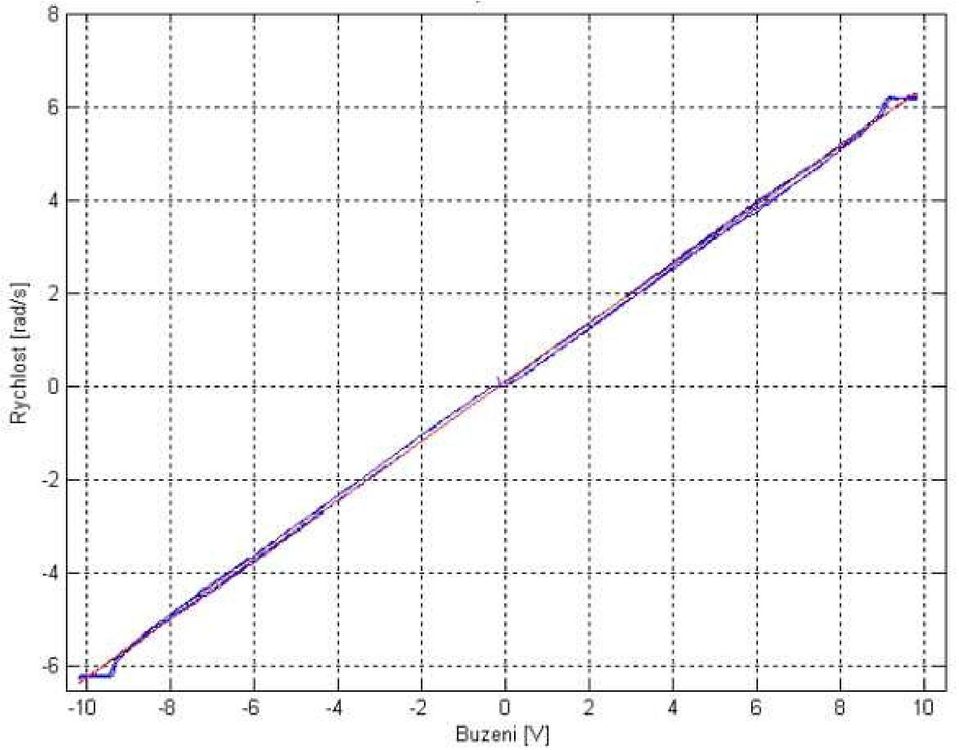
6 Statická charakteristika Měření závislosti rychlosti otáček hřídele na buzení motoru jsme prováděli tak, že jsme soustavu budili sinusovým signálem s amplitudou 1 a frekvencí pi/60 a měřili polohu hřídele. Statická charakteristika pružné hřídele se setrvačníkem Aproximující přímka je určená rovnicí v m =0,6328*U-0,0981. Statická charakteristika na setrvačníku v n =0,6302*U-0,0179. Závěr 1. Z měření jsme určili převodní funkce mezi pulsy IRC snímačů a otáčkami hřídele. Tomu předcházelo určení jejich korekce a korekce offsetu. Experimentálně jsme zjistili statické převodní funkce a ty i s jejich aproximativními rovnicemi zobrazili. Na grafu je zřejmé že jeden prvek uprostřed měření vystupuje. To je způsobeno nedokonalým operačním systémem.

7
8 2. Elektromechanická soustava pružného pásu s napínací kladkou Schéma pro měření v simulinku Kompenzace klidového offsetu Kompenzační konstanty jsme zvolily pro první motor -0,016 a pro druhý -0,0203. Ocejchování referenčního laserového PSD snímače Cejchování jsme prováděli ve dvou mezních vzdálenostech pomocí posuvného měřítka. Převodní funkce z napětí snímače na skutečnou vzdálenost je d=5*u+5 Statická převodní charakteristika Poté jsme změřili statickou převodní charakteristiku indukčního snímače vzhledem k referenčnímu laserovému snímači. Ze dvou krajních bodů grafu lineární části jsme určili rovnici aproximující přímky v lineární oblasti. U=-1,3274*d+150,7776

9 Převodní charakteristika indukčního snímače Poté jsme měřili charakteristiku celé soustavy. Na vstup motorů byl dodáván sinusový signál s amplitudou 0,2 a frekvencí pi/30 a měřili jsme vzdálenost kladky. Závislost polohy snímače na velikosti budícího napětí

10 Proložená přímka má rovnici. d=-3,2006*u+125,6237 Chyby opakovatelnosti Chyby opakovatelnosti pro laserový snímač Střední hodnota 112,5673 [mm] Rozptyl 0,0056 [mm 2 ] Absolutní chyba 95% [mm] Relativní chyba % Určili jsme experimentálně klidový offset a spočítali převodní funkce snímačů. Indukční snímač jsme zkalibrovali podle laserového snímače a spočítali jeho převodní funkci. Statická charakteristika celé soustavy vykazuje hysterezi, proto jsme ji aproximovali přímkou. Nakonec jsme určili chyby opakovatelnosti. 3. Elektromechanická soustava vozíku s kyvadlem Schéma úlohy: Vozík je umístěn na kolejích a může se pohybovat oběma směry. Je poháněn trojfázovým asynchronním motorem, který je buzen frekvenčním měničem. Úkolem je odměřit statickou charakteristiku polohy vozíku v závislosti na otočení hřídele motoru a závislost rychlosti vozíku na buzení motoru.

11 Schéma měření v simulinku: d [m] magstrikč magstrikč. magstrikč inkreme. inkreme. inkreme. 1 [V] 2 [V] průměr snímač 1 snímač 2 průměr 0, , ,0 0, ,5 1,45 1,44 1,4 0, ,5 2,91 2,91 2,9 0, ,5 4,36 4,35 4,4

12 0, ,82 5, ,0 5,8 1, ,0 7,28 7,28 7,3 Statická charakteristika magnetostrikčního senzoru je na následujícím obrázku:

13 4. Indukční snímač vzdálenosti Schéma úlohy v Simulink: Naměřené hodnoty jsou v následující tabulce: d [mm] U 1 [V] U 2 [V] U [V] 20 1,552 1,730 1, ,646 3,628 3, ,719 5,647 5, ,938 7,834 7, ,586 9,638 9,612 Statická převodní charakteristika je na následujícím obrázku. Rovnice aproximující přímky je U = 0,3901*d 5,964. Chyba opakovatelnosti měření pro 1000 vzorků ve vzdálenosti 20mm: Střední hodnota 1,7175V (tj. 19,6911mm) rozptyl 2,316*10^(-5)V (tj. 6,0104*10^(-5)mm)

14 absolutní chyba 95% = ±9,6 mv (tj. 0,0152mm) relativní chyba = 0,048% Chyba opakovatelnosti měření pro 1000 vzorků ve vzdálenosti 40mm: Střední hodnota 9,6427V (tj. 40,0069mm) rozptyl 2,411*10^(-5)V (tj. 5,9987*10^(-5)mm) absolutní chyba 95% = ±9,6 mv (tj. 0,0152mm) relativní chyba = 0,048% Závěr 4.: Určili jsme statické převodní charakteristiky. Opět jsme vypočetli chybu opakovatelnosti.
mm) 0,0152mm) relativní chyba = 0,048% Závěr 4.")
15 5. Ultrazvukový snímač vzdálenosti Schéma úlohy v Simulink: Měření probíhalo tak, že jsme měřič posouvali po 20 cm k překážce, ke které jsme měřili vzdálenost. Měření jsme provedli v obou směrech. Naměřené hodnoty jsou v následující tabulce. d [cm] U 1 [V] U 2 [V] U [V] 100 2,349 2,337 2, ,631 2,619 2, ,945 2,931 2, ,249 3,244 3, ,561 3,553 3, ,875 3,873 3,874 Statická převodní charakteristika je na následujícím obrázku Rovnice aproximující přímky je U = *d
![d [cm] U 1 [V] U 2 [V] U [V] 100 2,349 2,337 2,343 120 2,631 2,619 2,625 140 2,945 2,931 2,938 160 3,249 3,244 3,247 180 3,561](/docs-images/52/12388326/images/page_15.jpg "3,553 3,557 200 3,875 3,873 3,874 Statická převodní charakteristika je na následujícím obrázku Rovnice aproximující přímky je U =")
16 Chyba opakovatelnosti měření pro 100 vzorků ve vzdálenosti 150cm a zavřeném okně: Střední hodnota 3,0801V (tj. 148,5803cm) rozptyl 1,4645*10^(-5)V (tj *10^(-4)cm) absolutní chyba 95% = ±7,6mV (tj. 0,4935cm) relativní chyba = 0,038% Chyba opakovatelnosti měření pro 200 vzorků ve vzdálenosti 150cm a otevřeném okně: Střední hodnota 3,0821V (tj. 148,7093cm) rozptyl 1,4166*10^(-4)V (tj. 9,2*10^(-3)cm) absolutní chyba 95% = ±23,3mV (tj. 1,5148cm) relativní chyba = 0,117% Závěr 5.: Určili jsme statické převodní charakteristiky. Opět jsme vypočetli chybu opakovatelnosti. Otevření okna při měření má na výsledky zásadní vliv. 6. Platinový a polovodičový snímač teploty ve vodní lázni Schéma úlohy: Katalogové údaje platinového snímače: Měřená teplota 0 C C (4-20mA, 2 10V). Schéma úlohy v Simulinku:

17 Statická charakteristika: Vodu jsme ohřáli na přibližně 90 C a poté pomalu chladili na zhruba 20 C. Průběh teploty platinového snímače v čase je vidět na následujícím grafu: Na grafu je patrné, že rychleji klesala teplota při vyšším rozdílu s teplotou okolí. Průběh napětí na polovodičovém snímači v čase je vidět na následujícím grafu:

18 Statická charakteristika z napětí polovodičového snímače na hodnotu teploty platinového snímače je vidět na následujícím grafu: Průběh není lineární, dá se aproximovat rovnicí T=0.9382*U *U *U Chyba opakovatelnosti měření pro 1000 vzorků teploty na platinovém snímači: Střední hodnota 24,55 C (ustálená teplota v místnosti) rozptyl 0,0063 C absolutní chyba 95% = ±0,158 C relativní chyba = 0,644% Závěr 6.: Určili jsme statické převodní charakteristiky dvou snímačů teploty. Opět jsme vypočetli chybu opakovatelnosti.

7. MĚŘENÍ LINEÁRNÍHO POSUVU
 7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
7. MĚŘENÍ LINEÁRNÍHO POSUVU Seznamte se s fyzikálními principy a funkcí následujících senzorů polohy: o odporový o optický inkrementální o diferenciální indukční s pohyblivým jádrem LVDT 1. Odporový a
PRAKTIKUM III. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009.
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. XXVI Název: Vláknová optika Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009 Odevzdal dne: Možný počet bodů
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. XXVI Název: Vláknová optika Pracoval: Jan Polášek stud. skup. 11 dne 23.4.2009 Odevzdal dne: Možný počet bodů
Systém vykonávající tlumené kmity lze popsat obyčejnou lineární diferenciální rovnice 2. řadu s nulovou pravou stranou:
 Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2014/2015 tm-ch-spec. 1.p 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a
Měření na nízkofrekvenčním zesilovači. Schéma zapojení:
 Číslo úlohy: Název úlohy: Jméno a příjmení: Třída/Skupina: / Měřeno dne: Měření na nízkofrekvenčním zesilovači Spolupracovali ve skupině Zadání úlohy: Na zadaném Nf zesilovači proveďte následující měření
Číslo úlohy: Název úlohy: Jméno a příjmení: Třída/Skupina: / Měřeno dne: Měření na nízkofrekvenčním zesilovači Spolupracovali ve skupině Zadání úlohy: Na zadaném Nf zesilovači proveďte následující měření
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr
 11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
Automatizační technika Měření č. 6- Analogové snímače
 Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Automatizační technika Měření č. - Analogové snímače Datum:.. Vypracoval: Los Jaroslav Skupina: SB 7 Analogové snímače Zadání: 1. Seznamte se s technickými parametry indukčních snímačů INPOS. Změřte statické
Pracoviště 1. Vliv vnitřního odporu voltmetru na výstupní napětí můstku. Přístroje: Úkol měření: Schéma zapojení:
 Přístroje: Pracoviště 1. Vliv vnitřního odporu voltmetru na výstupní napětí můstku zdroj stejnosměrného napětí 24 V odporová dekáda 2 ks voltmetr 5kΩ/ V, rozsah 1,2 V voltmetr 1kΩ/ V, rozsah 1,2 V voltmetr
Přístroje: Pracoviště 1. Vliv vnitřního odporu voltmetru na výstupní napětí můstku zdroj stejnosměrného napětí 24 V odporová dekáda 2 ks voltmetr 5kΩ/ V, rozsah 1,2 V voltmetr 1kΩ/ V, rozsah 1,2 V voltmetr
MĚŘENÍ TEPLOTY. MĚŘENÍ ODPOROVÝM SNÍMAČEM S Pt 100
 MĚŘENÍ TEPLOTY 1. úloha MĚŘENÍ ODPOROVÝM SNÍMAČEM S Pt 100 Úkol měření: 1. Změřte statickou charakteristiku R t = f(t) odporového snímače s Pt 100 v rozsahu teplot od 25 C do 80 C. Měření proveďte prostřednictvím
MĚŘENÍ TEPLOTY 1. úloha MĚŘENÍ ODPOROVÝM SNÍMAČEM S Pt 100 Úkol měření: 1. Změřte statickou charakteristiku R t = f(t) odporového snímače s Pt 100 v rozsahu teplot od 25 C do 80 C. Měření proveďte prostřednictvím
Obr. 1 Činnost omezovače amplitudy
 . Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
. Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
Zapojení odporových tenzometrů
 Zapojení odporových tenzometrů Zadání 1) Seznamte se s konstrukcí a použitím lineárních fóliových tenzometrů. 2) Proveďte měření na fóliových tenzometrech zapojených do můstku. 3) Zjistěte rovnici regresní
Zapojení odporových tenzometrů Zadání 1) Seznamte se s konstrukcí a použitím lineárních fóliových tenzometrů. 2) Proveďte měření na fóliových tenzometrech zapojených do můstku. 3) Zjistěte rovnici regresní
7. MĚŘENÍ LINEÁRNÍHO POSUVU
 7. MĚŘENÍ LINEÁRNÍHO POSUVU Úvod: Pro měření posuvu (změny polohy v daném směru) se používá řada senzorů pracujících na různých principech. Výběr vhodného typu závisí na jejich vlastnostech. 1. Potenciometrické
7. MĚŘENÍ LINEÁRNÍHO POSUVU Úvod: Pro měření posuvu (změny polohy v daném směru) se používá řada senzorů pracujících na různých principech. Výběr vhodného typu závisí na jejich vlastnostech. 1. Potenciometrické
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Fyzikální praktikum II
 Kabinet výuky obecné fyziky, UK MFF Fyzikální praktikum II Úloha č. 18 Název úlohy: Přechodové jevy v RLC obvodu Jméno: Ondřej Skácel Obor: FOF Datum měření: 2.11.2015 Datum odevzdání:... Připomínky opravujícího:
Kabinet výuky obecné fyziky, UK MFF Fyzikální praktikum II Úloha č. 18 Název úlohy: Přechodové jevy v RLC obvodu Jméno: Ondřej Skácel Obor: FOF Datum měření: 2.11.2015 Datum odevzdání:... Připomínky opravujícího:
Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
e, přičemž R Pro termistor, který máte k dispozici, platí rovnice
 Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
Nakreslete schéma vyhodnocovacího obvodu pro kapacitní senzor. Základní hodnota kapacity senzoru pf se mění maximálně o pf. omu má odpovídat výstupní napěťový rozsah V až V. Pro základní (klidovou) hodnotu
Elektrická měření pro I. ročník (Laboratorní cvičení)
") Střední škola informatiky a spojů, Brno, Čichnova 23 Elektrická měření pro I. ročník (Laboratorní cvičení) Studentská verze Zpracoval: Ing. Jiří Dlapal B R N O 2011 Úvod Výuka předmětu Elektrická měření
Střední škola informatiky a spojů, Brno, Čichnova 23 Elektrická měření pro I. ročník (Laboratorní cvičení) Studentská verze Zpracoval: Ing. Jiří Dlapal B R N O 2011 Úvod Výuka předmětu Elektrická měření
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
Měřící a senzorová technika
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ Měřící a senzorová technika Semestrální projekt Vypracovali: Petr Osadník Akademický rok: 2006/2007 Semestr: zimní Původní zadání úlohy
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ Měřící a senzorová technika Semestrální projekt Vypracovali: Petr Osadník Akademický rok: 2006/2007 Semestr: zimní Původní zadání úlohy
Elektronické praktikum EPR1
 Elektronické praktikum EPR1 Úloha číslo 4 název Záporná zpětná vazba v zapojení s operačním zesilovačem MAA741 Vypracoval Pavel Pokorný PINF Datum měření 9. 12. 2008 vypracování protokolu 14. 12. 2008
Elektronické praktikum EPR1 Úloha číslo 4 název Záporná zpětná vazba v zapojení s operačním zesilovačem MAA741 Vypracoval Pavel Pokorný PINF Datum měření 9. 12. 2008 vypracování protokolu 14. 12. 2008
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
PRAKTIKUM II Elektřina a magnetismus
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: XVIII Název: Přechodové jevy v RLC obvodu Pracoval: Pavel Brožek stud. skup. 12 dne 24.10.2008
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: XVIII Název: Přechodové jevy v RLC obvodu Pracoval: Pavel Brožek stud. skup. 12 dne 24.10.2008
Synchronní detektor, nazývaný též fázově řízený usměrňovač, je určen k měření elektrolytické střední hodnoty periodického signálu podle vztahu.
 ZADÁNÍ: ) Seznamte se se zapojením a principem činnosti synchronního detektoru 2) Změřte statickou převodní charakteristiku synchronního detektoru v rozsahu vstupního ss napětí ±V a určete její linearitu.
ZADÁNÍ: ) Seznamte se se zapojením a principem činnosti synchronního detektoru 2) Změřte statickou převodní charakteristiku synchronního detektoru v rozsahu vstupního ss napětí ±V a určete její linearitu.
Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy
 VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
PRAKTIKUM II. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. úlohač.5 Název: Měření osciloskopem. Pracoval: Lukáš Ledvina
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II. úlohač.5 Název: Měření osciloskopem Pracoval: Lukáš Ledvina stud.skup.14 dne:23.10.2009 Odevzdaldne: Možný počet bodů
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II. úlohač.5 Název: Měření osciloskopem Pracoval: Lukáš Ledvina stud.skup.14 dne:23.10.2009 Odevzdaldne: Možný počet bodů
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Návrh frekvenčního filtru
 Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
Zapojení teploměrů. Zadání. Schéma zapojení
 Zapojení teploměrů V této úloze je potřeba zapojit elektrickou pícku a zahřát na požadovanou teplotu, dále zapojit dané teploměry dle zadání a porovnávat jejich dynamické vlastnosti, tj. jejich přechodové
Zapojení teploměrů V této úloze je potřeba zapojit elektrickou pícku a zahřát na požadovanou teplotu, dále zapojit dané teploměry dle zadání a porovnávat jejich dynamické vlastnosti, tj. jejich přechodové
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE
 FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Úloha 3. Vzduchová dráha - ZZE, srážky, impuls síly Autor David Horák Datum měření 21. 11. 2011 Kruh 1 Skupina 7 Klasifikace 1. PRACOVNÍ ÚKOLY: 1) Elastické srážky:
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Úloha 3. Vzduchová dráha - ZZE, srážky, impuls síly Autor David Horák Datum měření 21. 11. 2011 Kruh 1 Skupina 7 Klasifikace 1. PRACOVNÍ ÚKOLY: 1) Elastické srážky:
MĚŘENÍ TEPLOTY TERMOČLÁNKY
 MĚŘENÍ TEPLOTY TERMOČLÁNKY Úkoly měření: 1. Změřte napětí termočlánku a) přímo pomocí ručního multimetru a stolního multimetru U3401A. Při výpočtu teploty uvažte skutečnou teplotu srovnávacího spoje termočlánku,
MĚŘENÍ TEPLOTY TERMOČLÁNKY Úkoly měření: 1. Změřte napětí termočlánku a) přímo pomocí ručního multimetru a stolního multimetru U3401A. Při výpočtu teploty uvažte skutečnou teplotu srovnávacího spoje termočlánku,
Výukové texty. pro předmět. Měřící technika (KKS/MT) na téma. Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti
 na téma. Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření otáček a úhlové rychlosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu
Graf I - Závislost magnetické indukce na proudu protékajícím magnetem. naměřené hodnoty kvadratické proložení. B [m T ] I[A]
![Graf I - Závislost magnetické indukce na proudu protékajícím magnetem. naměřené hodnoty kvadratické proložení. B [m T ] I[A]](/thumbs/27/10456203.jpg "Graf I - Závislost magnetické indukce na proudu protékajícím magnetem. naměřené hodnoty kvadratické proložení. B [m T ] I[A]") Pracovní úkol 1. Proměřte závislost magnetické indukce na proudu magnetu. 2. Pomocí kamery změřte ve směru kolmém k magnetickému poli rozštěpení červené spektrální čáry kadmia pro 8-10 hodnot magnetické
Pracovní úkol 1. Proměřte závislost magnetické indukce na proudu magnetu. 2. Pomocí kamery změřte ve směru kolmém k magnetickému poli rozštěpení červené spektrální čáry kadmia pro 8-10 hodnot magnetické
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Měření vlastností optického vlákna
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická LABORATORNÍ ÚLOHA Č. 1 Měření vlastností optického vlákna Vypracovali: Jan HLÍDEK & Lukáš TULACH V rámci předmětu: Telekomunikační systémy
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická LABORATORNÍ ÚLOHA Č. 1 Měření vlastností optického vlákna Vypracovali: Jan HLÍDEK & Lukáš TULACH V rámci předmětu: Telekomunikační systémy
Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků,
 5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
5. října 2015 1 TYPY SIGNÁLŮ Vzorkovací zesilovač základní princip všech digitálních osciloskopů, záznamníků, převodníků, http://www.tek.com/products/oscilloscopes/dpo4000/ 5. října 2015 2 II. ÚPRAVA SIGNÁLŮ
Využití neuronové sítě pro identifikaci realného systému
 1 Portál pre odborné publikovanie ISSN 1338-0087 Využití neuronové sítě pro identifikaci realného systému Pišan Radim Elektrotechnika 20.06.2011 Identifikace systémů je proces, kdy z naměřených dat můžeme
1 Portál pre odborné publikovanie ISSN 1338-0087 Využití neuronové sítě pro identifikaci realného systému Pišan Radim Elektrotechnika 20.06.2011 Identifikace systémů je proces, kdy z naměřených dat můžeme
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Posuzoval:... dne:...
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum 1 Úloha č. 10 Název: Rychlost šíření zvuku Pracoval: Jan Kotek stud.sk.: 17 dne: 2.3.2012 Odevzdal dne:... možný počet bodů
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum 1 Úloha č. 10 Název: Rychlost šíření zvuku Pracoval: Jan Kotek stud.sk.: 17 dne: 2.3.2012 Odevzdal dne:... možný počet bodů
Fyzikální praktikum FJFI ČVUT v Praze
 Fyzikální praktikum FJFI ČVUT v Praze Úloha 4: Cavendishův experiment Datum měření: 3. 1. 015 Skupina: 8, čtvrtek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: V přípravě odvoďte vztah pro
Fyzikální praktikum FJFI ČVUT v Praze Úloha 4: Cavendishův experiment Datum měření: 3. 1. 015 Skupina: 8, čtvrtek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: V přípravě odvoďte vztah pro
MĚŘENÍ Laboratorní cvičení z měření. Měření parametrů operačních zesilovačů, část 3-7-5
 MĚŘENÍ Laboratorní cvičení z měření Měření parametrů operačních zesilovačů, část Číslo projektu: Název projektu: Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 21 Číslo materiálu:
MĚŘENÍ Laboratorní cvičení z měření Měření parametrů operačních zesilovačů, část Číslo projektu: Název projektu: Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 21 Číslo materiálu:
MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK C) REGULAČNÍCH VENTILŮ
 REGULAČNÍCH VENTILŮ") Univerzita Pardubice Fakulta elektrotechniky a informatiky Měření neelektrických veličin Laboratorní úloha č. 8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK C) REGULAČNÍCH VENTILŮ Roman Mikulka, Martin
Univerzita Pardubice Fakulta elektrotechniky a informatiky Měření neelektrických veličin Laboratorní úloha č. 8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK C) REGULAČNÍCH VENTILŮ Roman Mikulka, Martin
2. Vyhodnoťte získané tloušťky a diskutujte, zda je vrstva v rámci chyby nepřímého měření na obou místech stejně silná.
 1 Pracovní úkoly 1. Změřte tloušťku tenké vrstvy ve dvou různých místech. 2. Vyhodnoťte získané tloušťky a diskutujte, zda je vrstva v rámci chyby nepřímého měření na obou místech stejně silná. 3. Okalibrujte
1 Pracovní úkoly 1. Změřte tloušťku tenké vrstvy ve dvou různých místech. 2. Vyhodnoťte získané tloušťky a diskutujte, zda je vrstva v rámci chyby nepřímého měření na obou místech stejně silná. 3. Okalibrujte
2. MĚŘENÍ TEPLOTY TERMOČLÁNKY
 2. MĚŘENÍ TEPLOTY TERMOČLÁNKY Otázky k úloze (domácí příprava): Jaká je teplota kompenzačního spoje ( studeného konce ), na kterou koriguje kompenzační krabice? Dá se to zjistit jednoduchým měřením? Čemu
2. MĚŘENÍ TEPLOTY TERMOČLÁNKY Otázky k úloze (domácí příprava): Jaká je teplota kompenzačního spoje ( studeného konce ), na kterou koriguje kompenzační krabice? Dá se to zjistit jednoduchým měřením? Čemu
Studium ultrazvukových vln
 Číslo úlohy: 8 Jméno: Vojtěch HORNÝ Spolupracoval: Jaroslav Zeman Datum měření: 12. 10. 2009 Číslo kroužku: pondělí 13:30 Číslo skupiny: 6 Klasifikace: Fyzikální praktikum FJFI ČVUT v Praze Studium ultrazvukových
Číslo úlohy: 8 Jméno: Vojtěch HORNÝ Spolupracoval: Jaroslav Zeman Datum měření: 12. 10. 2009 Číslo kroužku: pondělí 13:30 Číslo skupiny: 6 Klasifikace: Fyzikální praktikum FJFI ČVUT v Praze Studium ultrazvukových
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr
 Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Kompenzovaný vstupní dělič Analogový nízkofrekvenční milivoltmetr. Zadání: A. Na předloženém kompenzovaném vstupní děliči k nf milivoltmetru se vstupní impedancí Z vst = MΩ 25 pf, pro dělící poměry :2,
Tabulka I Měření tloušťky tenké vrstvy
 Pracovní úkol 1. Změřte tloušťku tenké vrstvy ve dvou různých místech. 2. Vyhodnoťte získané tloušťky a diskutujte, zda je vrstva v rámci chyby nepřímého měření na obou místech stejně silná. 3. Okalibrujte
Pracovní úkol 1. Změřte tloušťku tenké vrstvy ve dvou různých místech. 2. Vyhodnoťte získané tloušťky a diskutujte, zda je vrstva v rámci chyby nepřímého měření na obou místech stejně silná. 3. Okalibrujte
d p o r o v t e p l o m ě r, t e r m o č l á n k
 d p o r o v t e p l o m ě r, t e r m o č l á n k Ú k o l : a) Proveďte kalibraci odporového teploměru, termočlánku a termistoru b) Určete teplotní koeficienty odporového teploměru, konstanty charakterizující
d p o r o v t e p l o m ě r, t e r m o č l á n k Ú k o l : a) Proveďte kalibraci odporového teploměru, termočlánku a termistoru b) Určete teplotní koeficienty odporového teploměru, konstanty charakterizující
Závislost odporu termistoru na teplotě
 Fyzikální praktikum pro JCH, Bc Jméno a příjmení: Zuzana Dočekalová Datum: 21.4.2010 Spolupracovník: Aneta Sajdová Obor: Jaderně chemické inženýrství Číslo studenta: 5 (středa 9:30) Ročník: II. Číslo úlohy:
Fyzikální praktikum pro JCH, Bc Jméno a příjmení: Zuzana Dočekalová Datum: 21.4.2010 Spolupracovník: Aneta Sajdová Obor: Jaderně chemické inženýrství Číslo studenta: 5 (středa 9:30) Ročník: II. Číslo úlohy:
popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu
 4. Operační usměrňovače Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu Výklad Operační
4. Operační usměrňovače Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat činnost základních zapojení operačních usměrňovačů samostatně změřit zadanou úlohu Výklad Operační
Fyzikální praktikum FJFI ČVUT v Praze
 Fyzikální praktikum FJFI ČVUT v Praze Úloha 2: Hysterezní smyčka Datum měření: 11. 3. 2016 Doba vypracovávání: 10 hodin Skupina: 1, pátek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: Zjistěte,
Fyzikální praktikum FJFI ČVUT v Praze Úloha 2: Hysterezní smyčka Datum měření: 11. 3. 2016 Doba vypracovávání: 10 hodin Skupina: 1, pátek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: Zjistěte,
Harmonické oscilátory
 Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Měření hlukových map
 Úloha č. 1 Měření hlukových map Úkoly měření: 1. Pomocí hlukoměru SL400 měřte rozložení hladin akustického tlaku v blízkosti zdroje hluku. 2. Pomocí hlukoměru SL400 měřte rozložení hladin akustického tlaku
Úloha č. 1 Měření hlukových map Úkoly měření: 1. Pomocí hlukoměru SL400 měřte rozložení hladin akustického tlaku v blízkosti zdroje hluku. 2. Pomocí hlukoměru SL400 měřte rozložení hladin akustického tlaku
5. A/Č převodník s postupnou aproximací
 5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
5. A/Č převodník s postupnou aproximací Otázky k úloze domácí příprava a) Máte sebou USB flash-disc? b) Z jakých obvodů se v principu skládá převodník s postupnou aproximací? c) Proč je v zapojení použit
Měření a analýza mechanických vlastností materiálů a konstrukcí. 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály
 FP 1 Měření a analýza mechanických vlastností materiálů a konstrukcí Úkoly : 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály 2. Určete moduly pružnosti vzorků nepřímo pomocí měření rychlosti
FP 1 Měření a analýza mechanických vlastností materiálů a konstrukcí Úkoly : 1. Určete moduly pružnosti E z ohybu tyče pro 4 různé materiály 2. Určete moduly pružnosti vzorků nepřímo pomocí měření rychlosti
8. Sběr a zpracování technologických proměnných
 8. Sběr a zpracování technologických proměnných Účel: dodat v částečně předzpracovaném a pro další použití vhodném tvaru ucelenou informaci o procesu pro následnou analyzu průběhu procesu a pro rozhodování
8. Sběr a zpracování technologických proměnných Účel: dodat v částečně předzpracovaném a pro další použití vhodném tvaru ucelenou informaci o procesu pro následnou analyzu průběhu procesu a pro rozhodování
Senzor polohy rotoru vysokootáčkového elektromotoru
 Senzor polohy rotoru vysokootáčkového elektromotoru Vysokootáčkový elektromotor Jednou z cest, jak zvýšit užitné vlastnosti výrobků je intenzifikace jejich užitných vlastností. V oblasti elektromotorů
Senzor polohy rotoru vysokootáčkového elektromotoru Vysokootáčkový elektromotor Jednou z cest, jak zvýšit užitné vlastnosti výrobků je intenzifikace jejich užitných vlastností. V oblasti elektromotorů
Úloha 1: Kondenzátor, mapování elektrostatického pole
 Úloha 1: Kondenzátor, mapování elektrostatického pole FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 19.4.2010 Jméno: František Batysta Pracovní skupina: 5 Ročník a kroužek: 2. ročník, pond. odp.
Úloha 1: Kondenzátor, mapování elektrostatického pole FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 19.4.2010 Jméno: František Batysta Pracovní skupina: 5 Ročník a kroužek: 2. ročník, pond. odp.
PRAKTIKUM I. Oddělení fyzikálních praktik při Kabinetu výuky obecně fyziky MFF UK. úlohač.11 Název: Dynamická zkouška deformace látek v tlaku
 Oddělení fyzikálních praktik při Kabinetu výuky obecně fyziky MFF UK PRAKTIKUM I. úlohač.11 Název: Dynamická zkouška deformace látek v tlaku Pracoval: Lukáš Ledvina stud.skup.17 10.3.2009 Odevzdal dne:
Oddělení fyzikálních praktik při Kabinetu výuky obecně fyziky MFF UK PRAKTIKUM I. úlohač.11 Název: Dynamická zkouška deformace látek v tlaku Pracoval: Lukáš Ledvina stud.skup.17 10.3.2009 Odevzdal dne:
3. Diskutujte výsledky měření z hlediska platnosti Biot-Savartova zákona.
 1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU
 6. MĚŘENÍ SÍLY A ROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
6. MĚŘENÍ SÍLY A ROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
MĚŘENÍ Laboratorní cvičení z měření. Měření magnetických veličin, část 3-9-3
 MĚŘENÍ Laboratorní cvičení z měření Měření magnetických veličin, část 3-9-3 Číslo projektu: CZ..07/.5.00/34.0093 Název projektu: Inovace výuky na VOŠ a SPŠ Šumperk Šablona: III/ Inovace a zkvalitnění výuky
MĚŘENÍ Laboratorní cvičení z měření Měření magnetických veličin, část 3-9-3 Číslo projektu: CZ..07/.5.00/34.0093 Název projektu: Inovace výuky na VOŠ a SPŠ Šumperk Šablona: III/ Inovace a zkvalitnění výuky
Měření neelektrických veličin. Fakulta strojního inženýrství VUT v Brně Ústav konstruování
 Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Jméno a příjmení. Ročník. Měřeno dne. Marek Teuchner Příprava Opravy Učitel Hodnocení. 1 c p. = (ε r
 FYZIKÁLNÍ PRAKTIKUM Ústav fyziky FEKT VUT BRNO Jméno a příjmení Petr Švaňa Ročník 1 Předmět IFY Kroužek 38 ID 155793 Lab. skup. Spolupracoval Měřeno dne Odevzdáno dne Marek Teuchner 11. 3. 2013 25. 3.
FYZIKÁLNÍ PRAKTIKUM Ústav fyziky FEKT VUT BRNO Jméno a příjmení Petr Švaňa Ročník 1 Předmět IFY Kroužek 38 ID 155793 Lab. skup. Spolupracoval Měřeno dne Odevzdáno dne Marek Teuchner 11. 3. 2013 25. 3.
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS72 2005/2006 PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č.2 - Průmyslová sběrnice RS485 Vypracoval: Ha Minh 7. 5. 2006 Spolupracoval: Josef Dovrtěl Zadání. Seznamte se s úlohou distribuovaného systému řízení
NS72 2005/2006 PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č.2 - Průmyslová sběrnice RS485 Vypracoval: Ha Minh 7. 5. 2006 Spolupracoval: Josef Dovrtěl Zadání. Seznamte se s úlohou distribuovaného systému řízení
1. Okalibrujte pomocí bodu tání ledu, bodu varu vody a bodu tuhnutí cínu:
 1 Pracovní úkoly 1. Okalibrujte pomocí bodu tání ledu, bodu varu vody a bodu tuhnutí cínu: a. platinový odporový teploměr (určete konstanty R 0, A, B) b. termočlánek měď-konstantan (určete konstanty a,
1 Pracovní úkoly 1. Okalibrujte pomocí bodu tání ledu, bodu varu vody a bodu tuhnutí cínu: a. platinový odporový teploměr (určete konstanty R 0, A, B) b. termočlánek měď-konstantan (určete konstanty a,
A:Měření odporových teploměrů v ultratermostatu B:Měření teploty totálním pyrometrem KET/MNV (8. cvičení)
") A:Měření odporových teploměrů v ultratermostatu B:Měření teploty totálním pyrometrem KET/MNV (8. cvičení) Vypracoval : Martin Dlouhý Osobní číslo : A8B268P A:Měření odporových teploměrů v ultratermostatu
A:Měření odporových teploměrů v ultratermostatu B:Měření teploty totálním pyrometrem KET/MNV (8. cvičení) Vypracoval : Martin Dlouhý Osobní číslo : A8B268P A:Měření odporových teploměrů v ultratermostatu
MĚŘENÍ Laboratorní cvičení z měření. Měření oteplovací charakteristiky, část 3-3-4
 MĚŘENÍ Laboratorní cvičení z měření Měření oteplovací charakteristiky, část Číslo projektu: Název projektu: Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 20 Číslo materiálu: VY_32_INOVACE_
MĚŘENÍ Laboratorní cvičení z měření Měření oteplovací charakteristiky, část Číslo projektu: Název projektu: Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Sada: 20 Číslo materiálu: VY_32_INOVACE_
PRAKTIKUM III. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. IV Název: Měření fotometrického diagramu. Fotometrické veličiny a jejich jednotky Pracoval: Jan Polášek stud.
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM III Úloha č. IV Název: Měření fotometrického diagramu. Fotometrické veličiny a jejich jednotky Pracoval: Jan Polášek stud.
Modelování elektromechanického systému
 Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Výukové texty. pro předmět. Měřící technika (KKS/MT) na téma. Tvorba grafické vizualizace principu měření polohy a vzdálenosti
 na téma. Tvorba grafické vizualizace principu měření polohy a vzdálenosti") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření polohy a vzdálenosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu měření
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Tvorba grafické vizualizace principu měření polohy a vzdálenosti Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace principu měření
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU
 6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
6. MĚŘENÍ SÍLY A KROUTICÍHO MOMENTU 6.1. Úkol měření 6.1.1. Měření krouticího momentu a úhlu natočení a) Změřte krouticí moment M k a úhel natočení ocelové tyče kruhového průřezu (ČSN 10340). Měření proveďte
MĚŘENÍ JALOVÉHO VÝKONU
 MĚŘENÍ JALOVÉHO VÝKONU &1. Které elektrické stroje jsou spotřebiči jalového výkonu a na co ho potřebují? &2. Nakreslete fázorový diagram RL zátěže připojené na zdroj střídavého napětí. &2.1 Z fázorového
MĚŘENÍ JALOVÉHO VÝKONU &1. Které elektrické stroje jsou spotřebiči jalového výkonu a na co ho potřebují? &2. Nakreslete fázorový diagram RL zátěže připojené na zdroj střídavého napětí. &2.1 Z fázorového
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK
 Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE. Úloha 11: Termická emise elektronů
 FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 15.4.2011 Jméno: Jakub Kákona Pracovní skupina: 4 Ročník a kroužek: Pa 9:30 Spolupracovníci: Jana Navrátilová Hodnocení: Úloha 11: Termická emise elektronů
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 15.4.2011 Jméno: Jakub Kákona Pracovní skupina: 4 Ročník a kroužek: Pa 9:30 Spolupracovníci: Jana Navrátilová Hodnocení: Úloha 11: Termická emise elektronů
Kalibrační pracoviště
 ! Popis systému Systém jakosti Adash s.r.o., Ostrava, Česká republika, tel.: +420 596 232 670, fax: +420 596 232 671, email: info@adash.cz Další technické a kontaktní informace najdete na www.adash.net,
! Popis systému Systém jakosti Adash s.r.o., Ostrava, Česká republika, tel.: +420 596 232 670, fax: +420 596 232 671, email: info@adash.cz Další technické a kontaktní informace najdete na www.adash.net,
2 Nd:YAG laser buzený laserovou diodou
 2 Nd:YAG laser buzený laserovou diodou 15. května 2011 Základní praktikum laserové techniky Zpracoval: Vojtěch Horný Datum měření: 12. května 2011 Pracovní skupina: 1 Ročník: 3. Naměřili: Vojtěch Horný,
2 Nd:YAG laser buzený laserovou diodou 15. května 2011 Základní praktikum laserové techniky Zpracoval: Vojtěch Horný Datum měření: 12. května 2011 Pracovní skupina: 1 Ročník: 3. Naměřili: Vojtěch Horný,
Praktikum III - Optika
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky M UK Praktikum III - Optika Úloha č. 5 Název: Charakteristiky optoelektronických součástek Pracoval: Matyáš Řehák stud.sk.: 13 dne: 2. 3. 28
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky M UK Praktikum III - Optika Úloha č. 5 Název: Charakteristiky optoelektronických součástek Pracoval: Matyáš Řehák stud.sk.: 13 dne: 2. 3. 28
KATEDRA ELEKTRICKÝCH MĚŘENÍ
 VŠB-TU Ostrava Datum měření: Datum odevzdání/hodnocení: KATEDRA ELEKTRICKÝCH MĚŘENÍ 9. VIRTUÁLNÍ MĚŘICÍ PŘÍSTROJE Fakulta elektrotechniky a informatiky Jména, studijní skupiny: Cíl měření: Seznámit se
VŠB-TU Ostrava Datum měření: Datum odevzdání/hodnocení: KATEDRA ELEKTRICKÝCH MĚŘENÍ 9. VIRTUÁLNÍ MĚŘICÍ PŘÍSTROJE Fakulta elektrotechniky a informatiky Jména, studijní skupiny: Cíl měření: Seznámit se
PRAKTIKUM I. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne:
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. Úloha č. VII Název: Studium kmitů vázaných oscilátorů Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne: 27. 2. 2012 Odevzdal
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. Úloha č. VII Název: Studium kmitů vázaných oscilátorů Pracoval: Pavel Ševeček stud. skup.: F/F1X/11 dne: 27. 2. 2012 Odevzdal
Praktikum I úloha IX. Měření modulu pružnosti v tahu
 Praktikum I úloha IX. Měření modulu pružnosti v tahu Štěpán Roučka úkol 1. Změřte modul pružnosti v tahu E oceli z protažení drátu. 2. Změřte modul pružnosti v tahu E oceli a duralu nebo mosazi z průhybu
Praktikum I úloha IX. Měření modulu pružnosti v tahu Štěpán Roučka úkol 1. Změřte modul pružnosti v tahu E oceli z protažení drátu. 2. Změřte modul pružnosti v tahu E oceli a duralu nebo mosazi z průhybu
PRAKTIKUM II Elektřina a magnetismus
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: IX Název: Charakteristiky termistoru Pracoval: Pavel Brožek stud. skup. 12 dne 31.10.2008
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: IX Název: Charakteristiky termistoru Pracoval: Pavel Brožek stud. skup. 12 dne 31.10.2008
7. Určete frekvenční charakteristiku zasilovače v zapojení jako dolní propust. U 0 = R 2 U 1 (1)
") Úkoly 7 Operační zesilovač. Ověřte platnost vztahu pro výstupní napětí zesilovače při zapojení s invertujícím vstupem.. Určete frekvenční charakteristiku zesilovače při zapojení s neinvertujícím vstupem.
Úkoly 7 Operační zesilovač. Ověřte platnost vztahu pro výstupní napětí zesilovače při zapojení s invertujícím vstupem.. Určete frekvenční charakteristiku zesilovače při zapojení s neinvertujícím vstupem.
PRAKTIKUM II Elektřina a magnetismus
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: II Název: Měření odporů Pracoval: Pavel Brožek stud. skup. 12 dne 28.11.2008 Odevzdal
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: II Název: Měření odporů Pracoval: Pavel Brožek stud. skup. 12 dne 28.11.2008 Odevzdal
5. Pro jednu pružinu změřte závislost stupně vazby na vzdálenosti zavěšení pružiny od uložení
 1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
1 Pracovní úkoly 1. Změřte dobu kmitu T 0 dvou stejných nevázaných fyzických kyvadel.. Změřte doby kmitů T i dvou stejných fyzických kyvadel vázaných slabou pružnou vazbou vypouštěných z klidu při počátečních
Harmonický ustálený stav pokyny k měření Laboratorní cvičení č. 1
 Harmonický ustálený stav pokyny k měření Laboratorní cvičení č. Zadání. Naučte se pracovat s generátorem signálů Agilent 3320A, osciloskopem Keysight a střídavým voltmetrem Agilent 34405A. 2. Zobrazte
Harmonický ustálený stav pokyny k měření Laboratorní cvičení č. Zadání. Naučte se pracovat s generátorem signálů Agilent 3320A, osciloskopem Keysight a střídavým voltmetrem Agilent 34405A. 2. Zobrazte
PRAKTIKUM II Elektřina a magnetismus
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: X Název: Hallův jev Pracoval: Pavel Brožek stud. skup. 12 dne 19.12.2008 Odevzdal dne:
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II Elektřina a magnetismus Úloha č.: X Název: Hallův jev Pracoval: Pavel Brožek stud. skup. 12 dne 19.12.2008 Odevzdal dne:
Mikrosenzory a mikroelektromechanické systémy
 Mikrosenzory a mikroelektromechanické systémy Ing. Jaromír Hubálek, Ph.D. Ústav mikroelektroniky U7/104 Tel. 54114 6163 hubalek@feec.vutbr.cz http://www.umel.feec.vutbr.cz/~hubalek Obsah Úvod do senzorové
Mikrosenzory a mikroelektromechanické systémy Ing. Jaromír Hubálek, Ph.D. Ústav mikroelektroniky U7/104 Tel. 54114 6163 hubalek@feec.vutbr.cz http://www.umel.feec.vutbr.cz/~hubalek Obsah Úvod do senzorové
Střední průmyslová škola elektrotechnická a informačních technologií Brno
 Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.7/1.5./34.521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.7/1.5./34.521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE. Úloha 1: Kondenzátor, mapování elektrického pole
 FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 5.5.2011 Jméno: Jakub Kákona Pracovní skupina: 4 Ročník a kroužek: Pa 9:30 Spolupracovníci: Jana Navrátilová Hodnocení: Úloha 1: Kondenzátor, mapování
FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE Datum měření: 5.5.2011 Jméno: Jakub Kákona Pracovní skupina: 4 Ročník a kroužek: Pa 9:30 Spolupracovníci: Jana Navrátilová Hodnocení: Úloha 1: Kondenzátor, mapování
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Nastavení a ovládání Real-Time Toolboxu (v. 4.0.1) při práci s laboratorními úlohami Návod na cvičení Lukáš Hubka
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Nastavení a ovládání Real-Time Toolboxu (v. 4.0.1) při práci s laboratorními úlohami Návod na cvičení Lukáš Hubka
http://www.fch.ft.utb.cz/ps_lab_grafika.php
 Grafické zpracování závislostí laboratorní cvičení z FCH II Než začnete zpracovávat grafy, prostudujte si níže uvedený odkaz, na kterém jsou obecné zásady vyhodnocení experimentálně zjištěných a vypočtených
Grafické zpracování závislostí laboratorní cvičení z FCH II Než začnete zpracovávat grafy, prostudujte si níže uvedený odkaz, na kterém jsou obecné zásady vyhodnocení experimentálně zjištěných a vypočtených
Úloha 5: Spektrometrie záření α
 Petra Suková, 3.ročník 1 Úloha 5: Spektrometrie záření α 1 Zadání 1. Proveďte energetickou kalibraci α-spektrometru a určete jeho rozlišení. 2. Určeteabsolutníaktivitukalibračníhoradioizotopu 241 Am. 3.
Petra Suková, 3.ročník 1 Úloha 5: Spektrometrie záření α 1 Zadání 1. Proveďte energetickou kalibraci α-spektrometru a určete jeho rozlišení. 2. Určeteabsolutníaktivitukalibračníhoradioizotopu 241 Am. 3.
UVSSR, ODBOR ELEKTROTECHNIKY LABORATORNÍ CVIČENÍ ELEKTROTECHNIKA A ELEKTRONIKA
 Jméno: Vilem Skarolek Akademický rok: 2009/2010 Ročník: UVSSR, ODBOR ELEKTROTECHNIKY LABORATORNÍ CVIČENÍ ELEKTROTECHNIKA A ELEKTRONIKA 3. Semestr: 2. Datum měření: 12. 04. 2010 Datum odevzdání: 19. 4.
Jméno: Vilem Skarolek Akademický rok: 2009/2010 Ročník: UVSSR, ODBOR ELEKTROTECHNIKY LABORATORNÍ CVIČENÍ ELEKTROTECHNIKA A ELEKTRONIKA 3. Semestr: 2. Datum měření: 12. 04. 2010 Datum odevzdání: 19. 4.
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Elektronické praktikum EPR1
 Elektronické praktikum EPR1 Úloha číslo 2 název Vlastnosti polovodičových prvků Vypracoval Pavel Pokorný PINF Datum měření 11. 11. 2008 vypracování protokolu 23. 11. 2008 Zadání 1. Seznamte se s funkcí
Elektronické praktikum EPR1 Úloha číslo 2 název Vlastnosti polovodičových prvků Vypracoval Pavel Pokorný PINF Datum měření 11. 11. 2008 vypracování protokolu 23. 11. 2008 Zadání 1. Seznamte se s funkcí
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
Kalibrace a limity její přesnosti
 Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie Kalibrace a limity její přesnosti Semestrální práce Licenční studium GALILEO Interaktivní statistická analýza dat Brno, 2015
Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie Kalibrace a limity její přesnosti Semestrální práce Licenční studium GALILEO Interaktivní statistická analýza dat Brno, 2015
PRAKTIKUM II. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. úlohač.10 Název: Hallův jev. Pracoval: Lukáš Ledvina
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II. úlohač.10 Název: Hallův jev Pracoval: Lukáš Ledvina stud.skup.14 dne:16.10.2009 Odevzdaldne: Možný počet bodů Udělený
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM II. úlohač.10 Název: Hallův jev Pracoval: Lukáš Ledvina stud.skup.14 dne:16.10.2009 Odevzdaldne: Možný počet bodů Udělený
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič