Úvod do mobilní robotiky AIL028
|
|
|
- Arnošt Moravec
- před 9 lety
- Počet zobrazení:
Transkript
1 zbynek.winkler at mff.cuni.cz, md at robotika.cz 5. prosince 2005

2 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením (náznak řešení)

3 Mapa světa - příklad Obsah Mapa světa Exaktní plánování G G S S Malinkatý robot pohybující se po podlaze Úkolem je nalézt cestu ze startu do cíle a s ničím se nesrazit

4 Exaktní plánování Obsah Mapa světa Exaktní plánování nalezne cestu vždy, pokud existuje v opačném případě ověří, že neexistuje nejsou to aproximace jsou použitelné/pochopitelné pouze pro jednodušší případy jsou elegantní a efektivní

5 Dělení plánovacích algoritmů Mapa světa Exaktní plánování podle přesnosti exaktní aproximační podle popisu prostředí mapa cest dělení na jednoduché části podle tvaru robota bodový kruhový konvexní obecný podle stupňů volnosti robota posun posun s otáčením non-holonomic, např. autíčko

6 Plánování pro bodového / kruhového robota svět W = R 2 překážky polygony O volný prostor W \ O (free space) v nejjednodušším případě je robot bezrozměrný bod některé algoritmy lze zobecnit pro kružnici nafouknutím překážek

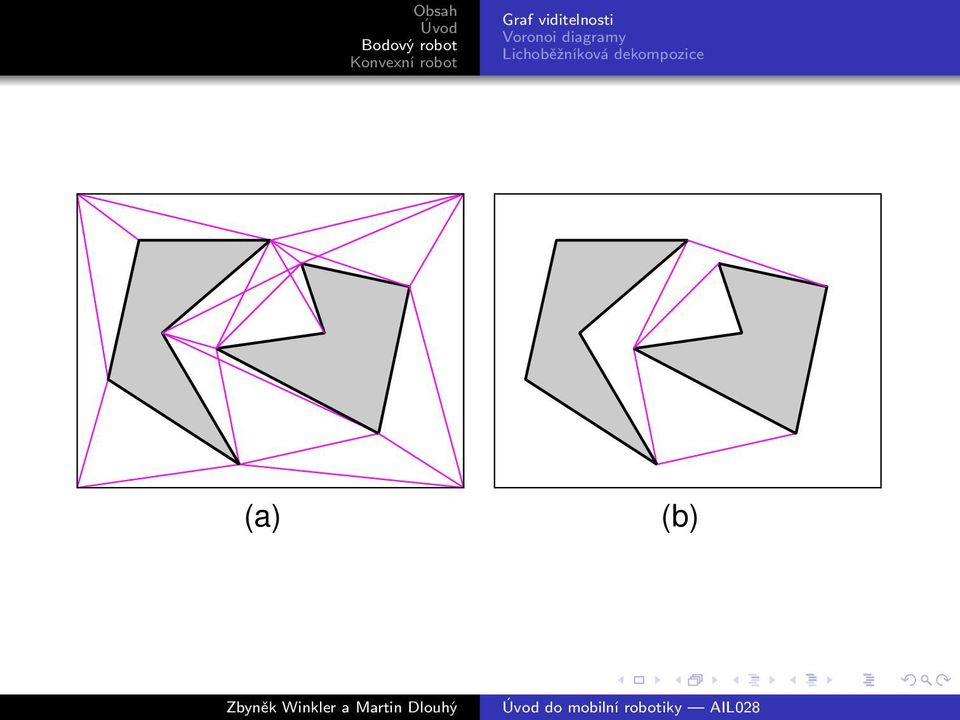
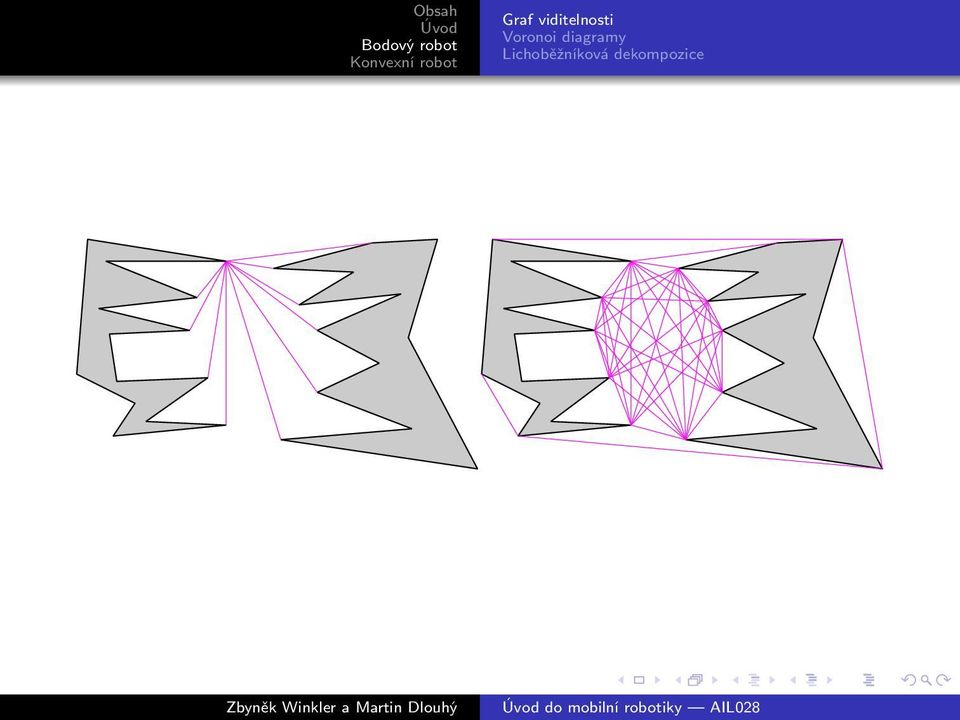
7 Obsah dva vrcholy jsou spojeny hranou, pokud jejich spojnice neprochází žádnou z překážek optimalizace pouze hrany, které mohou jít za roh hrana prodloužená o ɛ nesmí zasahovat do překážky naivní algoritmus O(n 3 ), sweep-line (koště) lepší nejkratší cesta nalezená v grafu je zároveň nejkratší možná pro původní problém

8 (a) (b)
9
10 Obr v lese Obsah obr (robot) = kružnice, stromy (překážky) = body obr je v lese, jak se dostane ven? kolik může přibrat (zhubnout)?

11 Obsah stromy se stanou řídícími body a rozdělí prostor do n oblastí každá oblast odpovídá právě jednomu řídícímu bodu body z oblasti mají nejblíže právě ke svému řídícímu bodu hranice oblastí Voronoi hrany stejná vzdálenost ke dvěma nejbližším překážkám při pohybu po hranách si udržujeme maximální možnou vzdálenost od překážek průchodnost hrany vzdálenost řídících bodů C C C D E B D E B D E B A (a) A (b) A (c)
 A (b) A")
12 Algoritmus pro cestu z lesa přejdi na síť např. směrem od nejbližší překážky hledej cestu v grafu pro nalezení nejširší cesty vybíráme vždy hranu s největší průchodností rozšíření pro polygony kromě řídících bodů i řídící úsečky hrany mohou být i kusy parabol (a) (b) (c)

13 Algoritmy pro konstrukci Voronoi diagramu naivní algoritmus O(n 4 ) počítá průsečíky každý s každým nejlepší algoritmus O(n log n) rozděl & panuj Fortune s line sweep další vesměs O(n 2 ) inkrementální konverze z obecné triangulace
 inkrementální konverze z")
14 rozdělit prostor na jednoduché buňky plánování uvnitř buňky je jednoduché cesta, je posloupnost buněk taková, že platí první buňka obsahuje start poslední buňka obsahuje cíl buňky v posloupnosti za sebou sdílí společnou hranu pro buňky lichoběžníkového tvaru to umíme v čase O(n log n)

15 Algoritmus zametací přímky setřídit všechny vrcholy podle souřadnice x zametáme zleva doprava koštětem koště má svůj stav utříděný seznam úseček podle y-ové osy, které zrovna protíná. stav se mění pouze ve vrcholech (událost) při každé události je stav aktualizován nalezení levého/pravého konce hrany koresponduje přidání/smazání hrany při průchodu sestavujeme graf reprezentující sousednost buněk Složitost O(n log n) třídění O(n log n), průchod O(n), aktualizace stavu koštěte O(n log n)
")
16
17 Obsah Plánování s otáčením (náznak řešení) co když robot není bezrozměrný bod ani kružnice? pro konvexního robota bez otáčení taky umíme nafouknout překážky

18 Plánování s otáčením (náznak řešení) problém žebříku Plánování s otáčením (náznak řešení) robot reprezenován úsečkou pro úsečku v jedné poloze lze použít lichoběžníkovou dekompozici spojenou s nafouknutím překážek v dalším kroku zkusíme úsečku pootočit topologický graf zůstává stejný po jisté době ale ke změně dojde (nejaký lichobežník zanikne, změní sousedy atp.) je možno spočítat pro 360 získáme složitější graf, ale s žebříkem můžeme i otáčet

19 Plánování s otáčením (náznak řešení)

20 Plánování s otáčením (náznak řešení)

Úvod do mobilní robotiky AIL028
 md at robotika.cz, zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor07/cs 27. listopadu 2007 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením Mapa světa - příklad Obsah Mapa světa Exaktní
md at robotika.cz, zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor07/cs 27. listopadu 2007 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením Mapa světa - příklad Obsah Mapa světa Exaktní
Semestrální práce z předmětu KMA/MM. Voroneho diagramy
 Semestrální práce z předmětu KMA/MM Voroneho diagramy Jméno a příjmení: Lenka Skalová Osobní číslo: A08N0185P Studijní obor: Finanční informatika a statistika Datum: 22. 1. 2010 Obsah Obsah... 2 1 Historie...
Semestrální práce z předmětu KMA/MM Voroneho diagramy Jméno a příjmení: Lenka Skalová Osobní číslo: A08N0185P Studijní obor: Finanční informatika a statistika Datum: 22. 1. 2010 Obsah Obsah... 2 1 Historie...
Úvod do mobilní robotiky AIL028
 Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Voronoiův diagram. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta
 12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
8. Geometrie vrací úder (sepsal Pavel Klavík)
") 8. Geometrie vrací úder (sepsal Pavel Klavík) Když s geometrickými problémy pořádně nezametete, ony vám to vrátí! Ale když užzametat,takurčitěnepodkoberecamístosmetákupoužijtepřímku.vtéto přednášce nás
8. Geometrie vrací úder (sepsal Pavel Klavík) Když s geometrickými problémy pořádně nezametete, ony vám to vrátí! Ale když užzametat,takurčitěnepodkoberecamístosmetákupoužijtepřímku.vtéto přednášce nás
Kapitola 11. Vzdálenost v grafech. 11.1 Matice sousednosti a počty sledů
 Kapitola 11 Vzdálenost v grafech V každém grafu lze přirozeným způsobem definovat vzdálenost libovolné dvojice vrcholů. Hlavním výsledkem této kapitoly je překvapivé tvrzení, podle kterého lze vzdálenosti
Kapitola 11 Vzdálenost v grafech V každém grafu lze přirozeným způsobem definovat vzdálenost libovolné dvojice vrcholů. Hlavním výsledkem této kapitoly je překvapivé tvrzení, podle kterého lze vzdálenosti
Výpočetní geometrie Computational Geometry
 Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6
 UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6 Lubomír Vašek Zlín 2013 Obsah... 3 1. Základní pojmy... 3 2. Princip rastrové reprezentace... 3 2.1 Užívané
UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6 Lubomír Vašek Zlín 2013 Obsah... 3 1. Základní pojmy... 3 2. Princip rastrové reprezentace... 3 2.1 Užívané
Minkowského operace a jejich aplikace
 KMA FAV ZČU Plzeň 1. února 2012 Obsah Aplikace Minkowského suma Minkowského rozdíl Minkowského součin v E 2 Minkowského součin kvaternionů Akce 22. 6. 1864-12. 1. 1909 Úvod Použití Rozmist ování (packing,
KMA FAV ZČU Plzeň 1. února 2012 Obsah Aplikace Minkowského suma Minkowského rozdíl Minkowského součin v E 2 Minkowského součin kvaternionů Akce 22. 6. 1864-12. 1. 1909 Úvod Použití Rozmist ování (packing,
PROBLÉM ČTYŘ BAREV. Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu?
 ROBLÉM ČTYŘ BAREV Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu? ROBLÉM ČTYŘ BAREV L KH ROBLÉM ČTYŘ BAREV Vytvoříme graf Kraje = vrcholy
ROBLÉM ČTYŘ BAREV Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu? ROBLÉM ČTYŘ BAREV L KH ROBLÉM ČTYŘ BAREV Vytvoříme graf Kraje = vrcholy
Intervalové stromy. Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme. 1. Změna jednoho čísla v posloupnosti.
 Intervalové stromy Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme průběžně provádět tyto dvě operace: 1. Změna jednoho čísla v posloupnosti. 2. Zjištění součtu čísel
Intervalové stromy Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme průběžně provádět tyto dvě operace: 1. Změna jednoho čísla v posloupnosti. 2. Zjištění součtu čísel
KMA/PDB. Karel Janečka. Tvorba materiálů byla podpořena z prostředků projektu FRVŠ č. F0584/2011/F1d
 KMA/PDB Prostorové spojení Karel Janečka Tvorba materiálů byla podpořena z prostředků projektu FRVŠ č. F0584/2011/F1d Obsah Prostorové spojení pomocí hnízděných cyklů. Prostorové spojení pomocí R-stromů.
KMA/PDB Prostorové spojení Karel Janečka Tvorba materiálů byla podpořena z prostředků projektu FRVŠ č. F0584/2011/F1d Obsah Prostorové spojení pomocí hnízděných cyklů. Prostorové spojení pomocí R-stromů.
PLÁNOVÁNÍ CESTY MOBILNÍHO ROBOTU POMOCÍ MRAVENČÍCH ALGORITMŮ MOBILE ROBOT PATH PLANNING BY MEANS OF ANT ALGORITHMS
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
Implementace A* algoritmu na konkrétní problém orientace v prostoru budov
 Implementace A* algoritmu na konkrétní problém orientace v prostoru budov Popis problému Orientaci ve známém prostředí lze převést na problém nalezení cesty z místa A do místa B. Obecně platí, že robot
Implementace A* algoritmu na konkrétní problém orientace v prostoru budov Popis problému Orientaci ve známém prostředí lze převést na problém nalezení cesty z místa A do místa B. Obecně platí, že robot
Digitální model reliéfu (terénu) a analýzy modelů terénu
 a analýzy modelů terénu") Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
MATEMATIKA vyšší úroveň obtížnosti
 MATEMATIKA vyšší úroveň obtížnosti DIDAKTICKÝ TEST MAIVD12C0T01 ILUSTRAČNÍ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje
MATEMATIKA vyšší úroveň obtížnosti DIDAKTICKÝ TEST MAIVD12C0T01 ILUSTRAČNÍ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje
Zdůvodněte, proč funkce n lg(n) roste alespoň stejně rychle nebo rychleji než než funkce lg(n!). Symbolem lg značíme logaritmus o základu 2.
 roste alespoň stejně rychle nebo rychleji než než funkce lg(n!). Symbolem lg značíme logaritmus o základu 2.") 1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 1 3 4 5 6 7 8 9 30 31 3 Zdůvodněte, proč funkce f(n) = n log(n) 1 n 1/ roste rychleji než funkce g(n) = n. Zdůvodněte, proč funkce f(n) = n 3/ log(n) roste
1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 1 3 4 5 6 7 8 9 30 31 3 Zdůvodněte, proč funkce f(n) = n log(n) 1 n 1/ roste rychleji než funkce g(n) = n. Zdůvodněte, proč funkce f(n) = n 3/ log(n) roste
METODICKÝ NÁVOD PRO POŘIZOVÁNÍ A TVORBU AKTUALIZAČNÍCH DAT ÚMPS
 METODICKÝ NÁVOD PRO POŘIZOVÁNÍ A TVORBU AKTUALIZAČNÍCH DAT ÚMPS Příloha č. 6 k Z_OIS_006 Provozní řád digitální technické mapy města Mostu Stránka 1 z 31 OBSAH 1 MAPOVÁNÍ PRVKŮ ÚMPS... 3 1.1 Všeobecné
METODICKÝ NÁVOD PRO POŘIZOVÁNÍ A TVORBU AKTUALIZAČNÍCH DAT ÚMPS Příloha č. 6 k Z_OIS_006 Provozní řád digitální technické mapy města Mostu Stránka 1 z 31 OBSAH 1 MAPOVÁNÍ PRVKŮ ÚMPS... 3 1.1 Všeobecné
zejména Dijkstrův algoritmus pro hledání minimální cesty a hladový algoritmus pro hledání minimální kostry.
 Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
STROMOVE ALGORITMY Prohledavani do sirky (level-order) Po vodorovnejch carach fronta
 Po vodorovnejch carach fronta") STROMOVE ALGORITMY Prohledavani do sirky (level-order) Po vodorovnejch carach vlož do fronty kořen opakuj, dokud není fronta prázdná 1. vyber uzel z fronty a zpracuj jej 2. vlož do fronty levého následníka
STROMOVE ALGORITMY Prohledavani do sirky (level-order) Po vodorovnejch carach vlož do fronty kořen opakuj, dokud není fronta prázdná 1. vyber uzel z fronty a zpracuj jej 2. vlož do fronty levého následníka
Jarníkův algoritmus. Obsah. Popis
 1 z 6 28/05/2015 11:44 Jarníkův algoritmus Z Wikipedie, otevřené encyklopedie Jarníkův algoritmus (v zahraničí známý jako Primův algoritmus) je v teorii grafů algoritmus hledající minimální kostru ohodnoceného
1 z 6 28/05/2015 11:44 Jarníkův algoritmus Z Wikipedie, otevřené encyklopedie Jarníkův algoritmus (v zahraničí známý jako Primův algoritmus) je v teorii grafů algoritmus hledající minimální kostru ohodnoceného
PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO
 MASARYKOVA UNIVERZITA V BRNĚ FAKULTA INFORMATIKY PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO DIAGRAMŮ A DALŠÍCH PROSTŘEDKŮ VÝPOČETNÍ GEOMETRIE DIPLOMOVÁ PRÁCE ING. PETR ŠVEC 2006 Prohlášení Prohlašuji, že diplomová
MASARYKOVA UNIVERZITA V BRNĚ FAKULTA INFORMATIKY PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO DIAGRAMŮ A DALŠÍCH PROSTŘEDKŮ VÝPOČETNÍ GEOMETRIE DIPLOMOVÁ PRÁCE ING. PETR ŠVEC 2006 Prohlášení Prohlašuji, že diplomová
Algoritmizace prostorových úloh
 Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Voroného konstrukce na mapě světa
 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 Základní myšlenka Je dána konečná množina M bodů v rovině X (obecně v metrickém prostoru).
na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 Základní myšlenka Je dána konečná množina M bodů v rovině X (obecně v metrickém prostoru).
Kostry. 9. týden. Grafy. Marie Demlová (úpravy Matěj Dostál) 16. dubna 2019
 16. dubna 2019") Grafy 16. dubna 2019 Tvrzení. Je dán graf G, pak následující je ekvivalentní. 1 G je strom. 2 Graf G nemá kružnice a přidáme-li ke grafu libovolnou hranu, uzavřeme přesně jednu kružnici. 3 Graf G je souvislý
Grafy 16. dubna 2019 Tvrzení. Je dán graf G, pak následující je ekvivalentní. 1 G je strom. 2 Graf G nemá kružnice a přidáme-li ke grafu libovolnou hranu, uzavřeme přesně jednu kružnici. 3 Graf G je souvislý
Prohledávání do šířky = algoritmus vlny
 Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
Základy matematiky kombinované studium 714 0365/06
 Základy matematiky kombinované studium 714 0365/06 1. Některé základní pojmy: číselné množiny, intervaly, operace s intervaly (sjednocení, průnik), kvantifikátory, absolutní hodnota čísla, vzorce: 2. Algebraické
Základy matematiky kombinované studium 714 0365/06 1. Některé základní pojmy: číselné množiny, intervaly, operace s intervaly (sjednocení, průnik), kvantifikátory, absolutní hodnota čísla, vzorce: 2. Algebraické
Multirobotická kooperativní inspekce
 Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
FORMULÁŘ PRO MAPOVÁNÍ PŘÍSTUPNOSTI OBJEKTŮ DLE MKPO
 FORMULÁŘ PRO MAPOVÁNÍ PŘÍSTUPNOSTI OBJEKTŮ DLE MKPO 13. DIVADLO HORNÍ POČERNICE VSTUP HLAVNÍ Vyhrazené parkovací stání lokalizace: na parkovišti u vstupu počet: 1 přístup od VPS ke vstupu do objektu: bezbariérový
FORMULÁŘ PRO MAPOVÁNÍ PŘÍSTUPNOSTI OBJEKTŮ DLE MKPO 13. DIVADLO HORNÍ POČERNICE VSTUP HLAVNÍ Vyhrazené parkovací stání lokalizace: na parkovišti u vstupu počet: 1 přístup od VPS ke vstupu do objektu: bezbariérový
Přednáška 3. 1GIS2 Digitální modely terénu, odvozené charakteristiky DMT, základní analýzy využívající DMT FŽP UJEP
 Přednáška 3 1GIS2 Digitální modely terénu, odvozené charakteristiky DMT, základní analýzy využívající DMT FŽP UJEP Digitální modely terénu - DMT (digitální model reliéfu DMR) (Digital Terrain Model(ing)
Přednáška 3 1GIS2 Digitální modely terénu, odvozené charakteristiky DMT, základní analýzy využívající DMT FŽP UJEP Digitální modely terénu - DMT (digitální model reliéfu DMR) (Digital Terrain Model(ing)
Text úlohy. Kolik je automaticky generovaných barev ve standardní paletě 3-3-2?
 Úloha 1 Kolik je automaticky generovaných barev ve standardní paletě 3-3-2? a. 256 b. 128 c. 216 d. cca 16,7 milionu Úloha 2 Jaká je výhoda adaptivní palety oproti standardní? a. Menší velikost adaptivní
Úloha 1 Kolik je automaticky generovaných barev ve standardní paletě 3-3-2? a. 256 b. 128 c. 216 d. cca 16,7 milionu Úloha 2 Jaká je výhoda adaptivní palety oproti standardní? a. Menší velikost adaptivní
a jiné elektronické přístroje včetně mobilů. Pracujte samostatně. Povolen je 1 list A4 vlastnoručně psaných poznámek k předmětu...
 Písemný test MA010 Grafy: 17.1. 2007, var A... 1). Vašim úkolem je sestrojit všechny neisomorfní jednoduché souvislé grafy na 6 vrcholech mající posloupnost stupňů 1,2,2,2,2,3. Zároveň zdůvodněte, proč
Písemný test MA010 Grafy: 17.1. 2007, var A... 1). Vašim úkolem je sestrojit všechny neisomorfní jednoduché souvislé grafy na 6 vrcholech mající posloupnost stupňů 1,2,2,2,2,3. Zároveň zdůvodněte, proč
9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy. Vyučující: Ing. Jan Pacina, Ph.D.
 9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Lehký úvod Digitální modely terénu jsou dnes v geoinformačních systémech
9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Lehký úvod Digitální modely terénu jsou dnes v geoinformačních systémech
MATEMATIKA+ MAMPD14C0T01 DIDAKTICKÝ TEST. 2.1 Pokyny k otevřeným úlohám. 1 Základní informace k zadání zkoušky. 2.2 Pokyny k uzavřeným úlohám
 MATEMATIKA+ DIDAKTICKÝ TEST MAMPD14C0T01 Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 3 úloh. Časový limit pro řešení didaktického
MATEMATIKA+ DIDAKTICKÝ TEST MAMPD14C0T01 Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 3 úloh. Časový limit pro řešení didaktického
Geometrické vyhledávání
 mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
1. Převeďte dané číslo do dvojkové, osmičkové a šestnáctkové soustavy: a) 759 10 b) 2578 10
 759 10 b) 2578 10") Úlohy- 2.cvičení 1. Převeďte dané číslo do dvojkové, osmičkové a šestnáctkové soustavy: a) 759 10 b) 2578 10 2. Převeďte dané desetinné číslo do dvojkové soustavy (DEC -> BIN): a) 0,8125 10 b) 0,35 10
Úlohy- 2.cvičení 1. Převeďte dané číslo do dvojkové, osmičkové a šestnáctkové soustavy: a) 759 10 b) 2578 10 2. Převeďte dané desetinné číslo do dvojkové soustavy (DEC -> BIN): a) 0,8125 10 b) 0,35 10
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 2003 2004
 PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 003 004 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO M 0030 Vyjádřete jedním desetinným číslem (4 ½ 4 ¼ ) (4 ½ + 4 ¼ ) Správné řešení: 0,5 Zjednodušte výraz : ( 4)
PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 003 004 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO M 0030 Vyjádřete jedním desetinným číslem (4 ½ 4 ¼ ) (4 ½ + 4 ¼ ) Správné řešení: 0,5 Zjednodušte výraz : ( 4)
Triangulace. Význam triangulace. trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy. příklad triangulace
 Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Realita versus data GIS
 http://www.indiana.edu/ Realita versus data GIS Data v GIS Typy dat prostorová (poloha a vzájemné vztahy) popisná (atributy) Reprezentace prostorových dat (formát) rastrová Spojitý konceptuální model vektorová
http://www.indiana.edu/ Realita versus data GIS Data v GIS Typy dat prostorová (poloha a vzájemné vztahy) popisná (atributy) Reprezentace prostorových dat (formát) rastrová Spojitý konceptuální model vektorová
ILUSTRAÈNÍ TEST LIBERECKÝ KRAJ
 ILUSTRAÈNÍ TEST LIBERECKÝ KRAJ 5 NEOTVÍREJ, DOKUD NEDOSTANEŠ POKYN! Test obsahuje 30 úloh na 60 minut. Každá úloha má právì jedno správné øešení. Za správné øešení získáš 2 body. Za chybnou odpovìï ztratíš
ILUSTRAÈNÍ TEST LIBERECKÝ KRAJ 5 NEOTVÍREJ, DOKUD NEDOSTANEŠ POKYN! Test obsahuje 30 úloh na 60 minut. Každá úloha má právì jedno správné øešení. Za správné øešení získáš 2 body. Za chybnou odpovìï ztratíš
f(x) = 9x3 5 x 2. f(x) = xe x2 f(x) = ln(x2 ) f(x) =
 = 9x3 5 x 2. f(x) = xe x2 f(x) = ln(x2 ) f(x) =") Zadání projektů Projekt 1 f(x) = 9x3 5 2. Určete souřadnice vrcholů obdélníka ABCD, jehož dva vrcholy mají kladnou y-ovou souřadnici a leží na parabole dané rovnicí y = 16 x 2 a další dva vrcholy leží
Zadání projektů Projekt 1 f(x) = 9x3 5 2. Určete souřadnice vrcholů obdélníka ABCD, jehož dva vrcholy mají kladnou y-ovou souřadnici a leží na parabole dané rovnicí y = 16 x 2 a další dva vrcholy leží
Svobodná chebská škola, základní škola a gymnázium s.r.o. procvičení a zapamatování počítání a měření úhlů
 METODICKÝ LIST DA50 Název tématu: Autor: Předmět: Ročník: Metody výuky: Formy výuky: Cíl výuky: Získané dovednosti: Stručný obsah: Úhly II. - Počítání a měření úhlů Astaloš Dušan Matematika šestý frontální,
METODICKÝ LIST DA50 Název tématu: Autor: Předmět: Ročník: Metody výuky: Formy výuky: Cíl výuky: Získané dovednosti: Stručný obsah: Úhly II. - Počítání a měření úhlů Astaloš Dušan Matematika šestý frontální,
Katedra informatiky, Univerzita Palackého v Olomouci. 27. listopadu 2013
 Katedra informatiky, Univerzita Palackého v Olomouci 27. listopadu 2013 Rekonstrukce 3D těles Reprezentace trojrozměrných dat. Hledání povrchu tělesa v těchto datech. Představení několika algoritmů. Reprezentace
Katedra informatiky, Univerzita Palackého v Olomouci 27. listopadu 2013 Rekonstrukce 3D těles Reprezentace trojrozměrných dat. Hledání povrchu tělesa v těchto datech. Představení několika algoritmů. Reprezentace
Zadání projektů z BPC2 pro letní semestr 2007/2008
 Zadání projektů z BPC2 pro letní semestr 2007/2008 Několik poznámek na úvod Projekt může být i konzolová aplikace. Záleží však na typu zadání, ne každé v konzolové aplikace vyřešit lze. Mezi studenty jsou
Zadání projektů z BPC2 pro letní semestr 2007/2008 Několik poznámek na úvod Projekt může být i konzolová aplikace. Záleží však na typu zadání, ne každé v konzolové aplikace vyřešit lze. Mezi studenty jsou
přirozený algoritmus seřadí prvky 1,3,2,8,9,7 a prvky 4,5,6 nechává Metody řazení se dělí:
 Metody řazení ve vnitřní a vnější paměti. Algoritmy řazení výběrem, vkládáním a zaměňováním. Heapsort, Shell-sort, Radix-sort, Quicksort. Řazení sekvenčních souborů. Řazení souborů s přímým přístupem.
Metody řazení ve vnitřní a vnější paměti. Algoritmy řazení výběrem, vkládáním a zaměňováním. Heapsort, Shell-sort, Radix-sort, Quicksort. Řazení sekvenčních souborů. Řazení souborů s přímým přístupem.
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vektorová data Michal Kačmařík, Daniela
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vektorová data Michal Kačmařík, Daniela
ALGORITMY A DATOVÉ STRUKTURY
 Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Algoritmus. Cílem kapitoly je seznámit žáky se základy algoritmu, s jeho tvorbou a způsoby zápisu.
 Algoritmus Cílem kapitoly je seznámit žáky se základy algoritmu, s jeho tvorbou a způsoby zápisu. Klíčové pojmy: Algoritmus, vlastnosti algoritmu, vývojový diagram Algoritmus Algoritmus je postup, pomocí
Algoritmus Cílem kapitoly je seznámit žáky se základy algoritmu, s jeho tvorbou a způsoby zápisu. Klíčové pojmy: Algoritmus, vlastnosti algoritmu, vývojový diagram Algoritmus Algoritmus je postup, pomocí
Úvod do mobilní robotiky AIL028
 Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
8 Přednáška z
 8 Přednáška z 3 12 2003 Problém minimální kostry: Dostaneme souvislý graf G = (V, E), w : E R + Našim úkolem je nalézt strom (V, E ) tak, aby výraz e E w(e) nabýval minimální hodnoty Řešení - Hladový (greedy)
8 Přednáška z 3 12 2003 Problém minimální kostry: Dostaneme souvislý graf G = (V, E), w : E R + Našim úkolem je nalézt strom (V, E ) tak, aby výraz e E w(e) nabýval minimální hodnoty Řešení - Hladový (greedy)
Registrační číslo Hodnocení - část A Hodnocení - část B Hodnocení - část A+B
 PŘIJÍMACÍ TEST Z INFORMATIKY A MATEMATIKY NAVAZUJÍCÍ MAGISTERSKÉ STUDIUM V OBORU APLIKOVANÁ INFORMATIKA FAKULTA INFORMATIKY A MANAGEMENTU UNIVERZITY HRADEC KRÁLOVÉ ČÁST A Registrační číslo Hodnocení -
PŘIJÍMACÍ TEST Z INFORMATIKY A MATEMATIKY NAVAZUJÍCÍ MAGISTERSKÉ STUDIUM V OBORU APLIKOVANÁ INFORMATIKA FAKULTA INFORMATIKY A MANAGEMENTU UNIVERZITY HRADEC KRÁLOVÉ ČÁST A Registrační číslo Hodnocení -
Cvičení 6 z předmětu CAD I PARAMETRICKÉ 3D MODELOVÁNÍ VÝKRES
 Cvičení 6 z předmětu CAD I PARAMETRICKÉ 3D MODELOVÁNÍ VÝKRES Cílem cvičení je osvojit si na jednoduchém modelu odlitého obrobku základní postupy při tvorbě výkresu.obrobek je vytvořen z předem vytvořeného
Cvičení 6 z předmětu CAD I PARAMETRICKÉ 3D MODELOVÁNÍ VÝKRES Cílem cvičení je osvojit si na jednoduchém modelu odlitého obrobku základní postupy při tvorbě výkresu.obrobek je vytvořen z předem vytvořeného
1. Blok 3 Bezpříkazová editace v AutoCADu
 1. Blok 3 Bezpříkazová editace v AutoCADu Studijní cíl Seznámení práce v režimu bezpříkazové editace v AutoCADu. Doba nutná k nastudování 2 3 hodiny Průvodce studiem Pro studium tohoto předmětu je požadovaná
1. Blok 3 Bezpříkazová editace v AutoCADu Studijní cíl Seznámení práce v režimu bezpříkazové editace v AutoCADu. Doba nutná k nastudování 2 3 hodiny Průvodce studiem Pro studium tohoto předmětu je požadovaná
Triangulace. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta.
 11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE. Teze diplomové práce
 ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE FAKULTA PROVOZNĚ EKONOMICKÁ KATEDRA SYSTÉMOVÉ A OPERAČNÍ ANALÝZY Obor: Veřejná správa a regionální rozvoj Teze diplomové práce Optimalizace tras pro cestovní kanceláře
ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE FAKULTA PROVOZNĚ EKONOMICKÁ KATEDRA SYSTÉMOVÉ A OPERAČNÍ ANALÝZY Obor: Veřejná správa a regionální rozvoj Teze diplomové práce Optimalizace tras pro cestovní kanceláře
PROGRAMOVÁNÍ. Cílem předmětu Programování je seznámit posluchače se způsoby, jak algoritmizovat základní programátorské techniky.
 Cílem předmětu Programování je seznámit posluchače se způsoby, jak algoritmizovat základní programátorské techniky. V průběhu budou vysvětlena následující témata: 1. Dynamicky alokovaná paměť 2. Jednoduché
Cílem předmětu Programování je seznámit posluchače se způsoby, jak algoritmizovat základní programátorské techniky. V průběhu budou vysvětlena následující témata: 1. Dynamicky alokovaná paměť 2. Jednoduché
Řešení problému batohu dynamickým programováním, metodou větví a hranic a aproximativním algoritmem
 2. 1. 213 MI-PAA úkol č. 2 Antonín Daněk Řešení problému batohu dynamickým programováním, metodou větví a hranic a aproximativním algoritmem 1 SPECIFIKACE ÚLOHY Cílem tohoto úkolu bylo naprogramovat řešení
2. 1. 213 MI-PAA úkol č. 2 Antonín Daněk Řešení problému batohu dynamickým programováním, metodou větví a hranic a aproximativním algoritmem 1 SPECIFIKACE ÚLOHY Cílem tohoto úkolu bylo naprogramovat řešení
GRAFY A GRAFOVÉ ALGORITMY
 KATEDRA INFORMATIKY PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITA PALACKÉHO GRAFY A GRAFOVÉ ALGORITMY ARNOŠT VEČERKA VÝVOJ TOHOTO UČEBNÍHO TEXTU JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ
KATEDRA INFORMATIKY PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITA PALACKÉHO GRAFY A GRAFOVÉ ALGORITMY ARNOŠT VEČERKA VÝVOJ TOHOTO UČEBNÍHO TEXTU JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ
MATEMATIKA vyšší úroveň obtížnosti
 MATEMATIKA vyšší úroveň obtížnosti DIDAKTICKÝ TEST MAIVD11C0T01 ILUSTRAČNÍ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje
MATEMATIKA vyšší úroveň obtížnosti DIDAKTICKÝ TEST MAIVD11C0T01 ILUSTRAČNÍ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje
LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015
 LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015 1 LBP 1 LBP Tato metoda, publikovaná roku 1996, byla vyvinuta za účelem sestrojení jednoduchého a výpočetně rychlého nástroje pro
LBP, HoG Ing. Marek Hrúz Ph.D. Plzeň Katedra kybernetiky 29. října 2015 1 LBP 1 LBP Tato metoda, publikovaná roku 1996, byla vyvinuta za účelem sestrojení jednoduchého a výpočetně rychlého nástroje pro
Vyplňování souvislé oblasti
 Počítačová grafika Vyplňování souvislé oblasti Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU. Které z následujících tvrzení není pravdivé: a) Princip interpolace je určení
Počítačová grafika Vyplňování souvislé oblasti Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU. Které z následujících tvrzení není pravdivé: a) Princip interpolace je určení
Neuropočítače. podnět. vnímání (senzory)
") Neuropočítače Princip inteligentního systému vnímání (senzory) podnět akce (efektory) poznání plánování usuzování komunikace Typické vlastnosti inteligentního systému: schopnost vnímat podněty z okolního
Neuropočítače Princip inteligentního systému vnímání (senzory) podnět akce (efektory) poznání plánování usuzování komunikace Typické vlastnosti inteligentního systému: schopnost vnímat podněty z okolního
Experimentální analýza hluku
 Experimentální analýza hluku Mezi nejčastěji měřené akustické veličiny patří akustický tlak, akustický výkon a intenzita zvuku (resp. jejich hladiny). Vedle členění dle měřené veličiny lze měření v akustice
Experimentální analýza hluku Mezi nejčastěji měřené akustické veličiny patří akustický tlak, akustický výkon a intenzita zvuku (resp. jejich hladiny). Vedle členění dle měřené veličiny lze měření v akustice
12. Aproximační algoritmy
 12. Aproximační algoritmy (F.Haško,J.enda,.areš, ichal Kozák, Vojta Tůma) Na minulých přednáškách jsme se zabývali různými těžkými rozhodovacími problémy. Tato se zabývá postupy, jak se v praxi vypořádat
12. Aproximační algoritmy (F.Haško,J.enda,.areš, ichal Kozák, Vojta Tůma) Na minulých přednáškách jsme se zabývali různými těžkými rozhodovacími problémy. Tato se zabývá postupy, jak se v praxi vypořádat
MATEMATIKA. 2Pravidla správného zápisu odpovědí. 1Základní informace k zadání zkoušky DIDAKTICKÝ TEST. Testový sešit neotvírejte, počkejte na pokyn!
 MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 30 bodů Pro přijetí uchazečů je rozhodné umístění v sestupném pořadí uchazečů podle dosaženého bodového hodnocení. 1Základní informace k zadání zkoušky
MATEMATIKA DIDAKTICKÝ TEST Maximální bodové hodnocení: 30 bodů Pro přijetí uchazečů je rozhodné umístění v sestupném pořadí uchazečů podle dosaženého bodového hodnocení. 1Základní informace k zadání zkoušky
Masarykova univerzita. Fakulta informatiky. Evoluce pohybu
 Masarykova univerzita Fakulta informatiky Evoluce pohybu IV109 Tomáš Kotula, 265 287 Brno, 2009 Úvod Pohyb je jedním ze základních projevů života. Zdá se tedy logické, že stejně jako ostatní vlastnosti
Masarykova univerzita Fakulta informatiky Evoluce pohybu IV109 Tomáš Kotula, 265 287 Brno, 2009 Úvod Pohyb je jedním ze základních projevů života. Zdá se tedy logické, že stejně jako ostatní vlastnosti
Digitální model reliéfu (terénu) a analýzy modelů terénu
 a analýzy modelů terénu") Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
Digitální model reliéfu (terénu) a analýzy modelů terénu Digitální modely terénu jsou dnes v geoinformačních systémech hojně využívány pro různé účely. Naměřená terénní data jsou často zpracována do podoby
autorovu srdci... Petr Hliněný, FI MU Brno 1 FI: MA010: Průnikové grafy
 9 Krátké povídání o průnikových grafech Od této lekce teorie grafů se zaměříme lehce na několik vybraných partíı teorie grafů bĺızkých autorovu srdci... Naším prvním výběrem jsou průnikové grafy, což jsou
9 Krátké povídání o průnikových grafech Od této lekce teorie grafů se zaměříme lehce na několik vybraných partíı teorie grafů bĺızkých autorovu srdci... Naším prvním výběrem jsou průnikové grafy, což jsou
Přijímací zkouška - matematika
 Přijímací zkouška - matematika Jméno a příjmení pište do okénka Číslo přihlášky Číslo zadání 1 Grafy 1 Pro který z následujících problémů není znám žádný algoritmus s polynomiální časovou složitostí? Problém,
Přijímací zkouška - matematika Jméno a příjmení pište do okénka Číslo přihlášky Číslo zadání 1 Grafy 1 Pro který z následujících problémů není znám žádný algoritmus s polynomiální časovou složitostí? Problém,
Bezkontaktní měření vzdálenosti optickými sondami MICRO-EPSILON
 Laboratoř kardiovaskulární biomechaniky Ústav mechaniky, biomechaniky a mechatroniky Fakulta strojní, ČVUT v Praze Bezkontaktní měření vzdálenosti optickými sondami MICRO-EPSILON 1 Měření: 8. 4. 2008 Trubička:
Laboratoř kardiovaskulární biomechaniky Ústav mechaniky, biomechaniky a mechatroniky Fakulta strojní, ČVUT v Praze Bezkontaktní měření vzdálenosti optickými sondami MICRO-EPSILON 1 Měření: 8. 4. 2008 Trubička:
Úložné systémy na nářadí
 Brašny na nářadí 179 Opasky a pouzdra na nářadí 183 Mobilní bedny na nářadí 187 Mobilní pracoviště 190 Boxy na nářadí 192 Organizery 197 Podstavce na řezání (kozy) 200 Dílenský nábytek 201 Úložné systémy
Brašny na nářadí 179 Opasky a pouzdra na nářadí 183 Mobilní bedny na nářadí 187 Mobilní pracoviště 190 Boxy na nářadí 192 Organizery 197 Podstavce na řezání (kozy) 200 Dílenský nábytek 201 Úložné systémy
Jan Březina. 7. března 2017
 TGH03 - stromy, ukládání grafů Jan Březina Technical University of Liberec 7. března 2017 Kružnice - C n V = {1, 2,..., n} E = {{1, 2}, {2, 3},..., {i, i + 1},..., {n 1, n}, {n, 1}} Cesta - P n V = {1,
TGH03 - stromy, ukládání grafů Jan Březina Technical University of Liberec 7. března 2017 Kružnice - C n V = {1, 2,..., n} E = {{1, 2}, {2, 3},..., {i, i + 1},..., {n 1, n}, {n, 1}} Cesta - P n V = {1,
5 Rekurze a zásobník. Rekurzivní volání metody
 5 Rekurze a zásobník Při volání metody z metody main() se do zásobníku uloží aktivační záznam obsahující - parametry - návratovou adresu, tedy adresu, kde bude program pokračovat v metodě main () po skončení
5 Rekurze a zásobník Při volání metody z metody main() se do zásobníku uloží aktivační záznam obsahující - parametry - návratovou adresu, tedy adresu, kde bude program pokračovat v metodě main () po skončení
Základní škola Moravský Beroun, okres Olomouc
 Charakteristika vyučovacího předmětu matematika Vyučovací předmět má časovou dotaci čtyři hodiny týdně v prvním ročníku, pět hodin týdně ve druhém až pátém ročníku, pět hodin týdně v šestém ročníku a čtyři
Charakteristika vyučovacího předmětu matematika Vyučovací předmět má časovou dotaci čtyři hodiny týdně v prvním ročníku, pět hodin týdně ve druhém až pátém ročníku, pět hodin týdně v šestém ročníku a čtyři
Gymnázium Vincence Makovského se sportovními třídami Nové Město na Moravě
 VY_32_INOVACE_MOB_BU_05 Sada: Mobilní aplikace ve výuce Téma: Aplikace Mapy.cz Autor: Mgr. Miloš Bukáček Předmět: Zeměpis Ročník: 4. ročník nižšího gymnázia Využití: Prezentace určená pro výklad Anotace:
VY_32_INOVACE_MOB_BU_05 Sada: Mobilní aplikace ve výuce Téma: Aplikace Mapy.cz Autor: Mgr. Miloš Bukáček Předmět: Zeměpis Ročník: 4. ročník nižšího gymnázia Využití: Prezentace určená pro výklad Anotace:
Plánování pohybu mobilního robotu a skupiny mobilních robotů
 Plánování pohybu mobilního robotu a skupiny mobilních robotů Dr. rer. nat. Martin Saska (ČVUT v Praze) 4.března 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České
Plánování pohybu mobilního robotu a skupiny mobilních robotů Dr. rer. nat. Martin Saska (ČVUT v Praze) 4.března 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České
 OBSAH 1 Pøedmluva 19 2 Evoluèní algoritmy: nástin 25 2.1 Centrální dogma evoluèních výpoèetních technik... 26 2.2 Chcete vìdìt víc?... 29 3 Historická fakta trochu jinak 31 3.1 Pár zajímavých faktù...
OBSAH 1 Pøedmluva 19 2 Evoluèní algoritmy: nástin 25 2.1 Centrální dogma evoluèních výpoèetních technik... 26 2.2 Chcete vìdìt víc?... 29 3 Historická fakta trochu jinak 31 3.1 Pár zajímavých faktù...
Úvod do teorie grafů
 Úvod do teorie grafů Neorientovaný graf G = (V,E,I) V množina uzlů (vrcholů) - vertices E množina hran - edges I incidence incidence je zobrazení, buď: funkce: I: E V x V relace: I E V V incidence přiřadí
Úvod do teorie grafů Neorientovaný graf G = (V,E,I) V množina uzlů (vrcholů) - vertices E množina hran - edges I incidence incidence je zobrazení, buď: funkce: I: E V x V relace: I E V V incidence přiřadí
13. Třídící algoritmy a násobení matic
 13. Třídící algoritmy a násobení matic Minulou přednášku jsme probírali QuickSort, jeden z historicky prvních třídících algoritmů, které překonaly kvadratickou složitost aspoň v průměrném případě. Proč
13. Třídící algoritmy a násobení matic Minulou přednášku jsme probírali QuickSort, jeden z historicky prvních třídících algoritmů, které překonaly kvadratickou složitost aspoň v průměrném případě. Proč
Geoinformatika. IX GIS modelování
 Geoinformatika IX GIS modelování jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Geoinformatika
Geoinformatika IX GIS modelování jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Geoinformatika
TGH06 - Hledání nejkratší cesty
 TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 26. března 2013 Motivační problémy Silniční sít reprezentovaná grafem. Najdi nejkratší/nejrychlejší cestu z místa A do místa
TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 26. března 2013 Motivační problémy Silniční sít reprezentovaná grafem. Najdi nejkratší/nejrychlejší cestu z místa A do místa
Datové struktury pro prostorové vyhledávání
 Datové struktury pro prostorové vyhledávání 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ SpatialData 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1
Datové struktury pro prostorové vyhledávání 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ SpatialData 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1
Rozhodovací stromy a jejich konstrukce z dat
 Příklad počítačová hra. Můžeme počítač naučit rozlišovat přátelské a přátelské roboty? Rozhodovací stromy a jejich konstruk z dat Učení s učitelem: u některých už víme, jakou mají povahu (klasifika) Neparametrická
Příklad počítačová hra. Můžeme počítač naučit rozlišovat přátelské a přátelské roboty? Rozhodovací stromy a jejich konstruk z dat Učení s učitelem: u některých už víme, jakou mají povahu (klasifika) Neparametrická
Konvexní obal a množina
 Definice M Množina se nazývá konvení, jestliže úsečka spojující libovolné dva její bod je částí této množin, tj. ab, M, t 0, : ta+ ( tb ) M konvení množina a b a b nekonvení množina Definice Konvení obal
Definice M Množina se nazývá konvení, jestliže úsečka spojující libovolné dva její bod je částí této množin, tj. ab, M, t 0, : ta+ ( tb ) M konvení množina a b a b nekonvení množina Definice Konvení obal
Základy informatiky. 07 Teorie grafů. Kačmařík/Szturcová/Děrgel/Rapant
 Základy informatiky 07 Teorie grafů Kačmařík/Szturcová/Děrgel/Rapant Obsah přednášky barvení mapy teorie grafů definice uzly a hrany typy grafů cesty, cykly, souvislost grafů Barvení mapy Kolik barev je
Základy informatiky 07 Teorie grafů Kačmařík/Szturcová/Děrgel/Rapant Obsah přednášky barvení mapy teorie grafů definice uzly a hrany typy grafů cesty, cykly, souvislost grafů Barvení mapy Kolik barev je
NPRG030 Programování I 3/2 Z --- NPRG031 Programování II --- 2/2 Z, Zk
 NPRG030 Programování I 3/2 Z --- NPRG031 Programování II --- 2/2 Z, Zk Pavel Töpfer Katedra softwaru a výuky informatiky MFF UK MFF Malostranské nám., 4. patro, pracovna 404 pavel.topfer@mff.cuni.cz http://ksvi.mff.cuni.cz/~topfer
NPRG030 Programování I 3/2 Z --- NPRG031 Programování II --- 2/2 Z, Zk Pavel Töpfer Katedra softwaru a výuky informatiky MFF UK MFF Malostranské nám., 4. patro, pracovna 404 pavel.topfer@mff.cuni.cz http://ksvi.mff.cuni.cz/~topfer
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra informatiky a výpočetní techniky DIPLOMOVÁ PRÁCE
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra informatiky a výpočetní techniky DIPLOMOVÁ PRÁCE Plzeň, 2007 Michal Zemek Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra informatiky a výpočetní techniky DIPLOMOVÁ PRÁCE Plzeň, 2007 Michal Zemek Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra
Celostátní kolo soutěže Baltík 2010, kategorie A a B
 Pokyny: 1. Kategorie A řeší jen úlohy 1, 2, 3 a kategorie B jen úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
Pokyny: 1. Kategorie A řeší jen úlohy 1, 2, 3 a kategorie B jen úlohy 2, 3, 4! 2. Řešení úloh ukládejte do složky, která se nachází na pracovní ploše počítače. Její název je stejný, jako je kód, který
VE 2D A 3D. Radek Výrut. Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského sumy
 25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
1 Úvod 3. 2 Historie 4
 Obsah 1 Úvod 3 2 Historie 4 3 Definice a základní vlastnosti Voroneho diagramů v rovině 5 3.1 Struktura Voroneho buňky.................... 5 3.2 Hrany Voroneho diagramu.................... 6 3.3 Základní
Obsah 1 Úvod 3 2 Historie 4 3 Definice a základní vlastnosti Voroneho diagramů v rovině 5 3.1 Struktura Voroneho buňky.................... 5 3.2 Hrany Voroneho diagramu.................... 6 3.3 Základní
přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat
 Zkouška ISR 2013 přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat 1. Rozdílné principy u induktivního a deduktivního
Zkouška ISR 2013 přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat 1. Rozdílné principy u induktivního a deduktivního
MATEMATIKA základní úroveň obtížnosti
 MATEMATIKA základní úroveň obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro
MATEMATIKA základní úroveň obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. Časový limit pro
Voroneho diagramy ZÁPADOČESKÁ UNIVERZITA. Semestrální práce z předmětu MM Matematické modelování FAKULTA APLIKOVANÝCH VĚD
 ZÁPADOČESKÁ UNIVERZITA FAKULTA APLIKOVANÝCH VĚD Semestrální práce z předmětu MM Matematické modelování Voroneho diagramy 20. ledna 2009 Petra Flajtingrová A08N0181P Obsah Obsah... 2 1. Historie Voroneho
ZÁPADOČESKÁ UNIVERZITA FAKULTA APLIKOVANÝCH VĚD Semestrální práce z předmětu MM Matematické modelování Voroneho diagramy 20. ledna 2009 Petra Flajtingrová A08N0181P Obsah Obsah... 2 1. Historie Voroneho
Kartografické modelování. VIII Modelování vzdálenosti
 VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
Výhody a nevýhody jednotlivých reprezentací jsou shrnuty na konci kapitoly.
 Kapitola Reprezentace grafu V kapitole?? jsme se dozvěděli, co to jsou grafy a k čemu jsou dobré. rzo budeme chtít napsat nějaký program, který s grafy pracuje. le jak si takový graf uložit do počítače?
Kapitola Reprezentace grafu V kapitole?? jsme se dozvěděli, co to jsou grafy a k čemu jsou dobré. rzo budeme chtít napsat nějaký program, který s grafy pracuje. le jak si takový graf uložit do počítače?
Základy informatiky. Teorie grafů. Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová
 Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
SYLABUS PŘEDNÁŠKY 6a Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčovací sítě) 4. ročník bakalářského studia studijní program G studijní obor G
 4. ročník bakalářského studia studijní program G studijní obor G") SYLABUS PŘEDNÁŠKY 6a Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčovací sítě) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 7. POLOHOVÉ VYTYČOVACÍ SÍTĚ Vytyčení je součástí realizace
SYLABUS PŘEDNÁŠKY 6a Z INŽENÝRSKÉ GEODÉZIE (Polohové vytyčovací sítě) 4. ročník bakalářského studia studijní program G studijní obor G říjen 2014 1 7. POLOHOVÉ VYTYČOVACÍ SÍTĚ Vytyčení je součástí realizace
Cíle. Stručná anotace. Harmonogram aktivity. sou. Doporučený ročník: 1. Demonstrace shodných zobrazení v rovině.
 sou Předmět: Matematika Doporučený ročník: 1. Vazba na ŠVP: Planimetrie Cíle Demonstrace shodných zobrazení v rovině. Stručná anotace Učitel zavede shodná zobrazení a jako demonstrační nástroj použije
sou Předmět: Matematika Doporučený ročník: 1. Vazba na ŠVP: Planimetrie Cíle Demonstrace shodných zobrazení v rovině. Stručná anotace Učitel zavede shodná zobrazení a jako demonstrační nástroj použije
Drsná matematika III 10. demonstrovaná cvičení Kostry grafů
 Drsná matematika III 10. demonstrovaná cvičení Kostry grafů Martin Panák Masarykova univerzita Fakulta informatiky 21.11. 2006 1 Domácí úlohy z minulého týdne Příklad 1 Příklad 2 Příklad 3 2 Borůvkův algoritmus
Drsná matematika III 10. demonstrovaná cvičení Kostry grafů Martin Panák Masarykova univerzita Fakulta informatiky 21.11. 2006 1 Domácí úlohy z minulého týdne Příklad 1 Příklad 2 Příklad 3 2 Borůvkův algoritmus
MAPOVÉ OKNO GSWEB. Nápověda. Pohyb v mapovém okně Výběr v mapovém okně. Panel Ovládání Panel Vrstvy. Tisk Přehledová mapa Redlining Přihlásit jako
 GSWEB Nápověda 1. Mapové okno Pohyb v mapovém okně Výběr v mapovém okně 2. Ovládací panel a panel vrstev Panel Ovládání Panel Vrstvy 3. GSWeb - roletové menu Tisk Přehledová mapa Redlining Přihlásit jako
GSWEB Nápověda 1. Mapové okno Pohyb v mapovém okně Výběr v mapovém okně 2. Ovládací panel a panel vrstev Panel Ovládání Panel Vrstvy 3. GSWeb - roletové menu Tisk Přehledová mapa Redlining Přihlásit jako