Úvod do mobilní robotiky AIL028
|
|
|
- Jaroslava Havlová
- před 10 lety
- Počet zobrazení:
Transkript
1 md at robotika.cz, zbynek.winkler at mff.cuni.cz listopadu 2007

2 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením

3 Mapa světa - příklad Obsah Mapa světa Exaktní plánování G G S S Malinkatý robot pohybující se po podlaze Úkolem je nalézt cestu ze startu do cíle a s ničím se nesrazit

4 Exaktní plánování Obsah Mapa světa Exaktní plánování nalezne cestu vždy, pokud existuje v opačném případě ověří, že neexistuje nejsou to aproximace jsou použitelné/pochopitelné pouze pro jednodušší případy jsou elegantní a efektivní

5 Dělení plánovacích algoritmů Mapa světa Exaktní plánování podle přesnosti exaktní aproximační podle popisu prostředí mapa cest dělení na jednoduché části podle tvaru robota bodový kruhový konvexní obecný podle stupňů volnosti robota posun posun s otáčením non-holonomic, např. autíčko

6 Plánování pro bodového / kruhového robota svět W = R 2 překážky polygony O volný prostor W \ O (free space) v nejjednodušším případě je robot bezrozměrný bod některé algoritmy lze zobecnit pro kružnici nafouknutím překážek

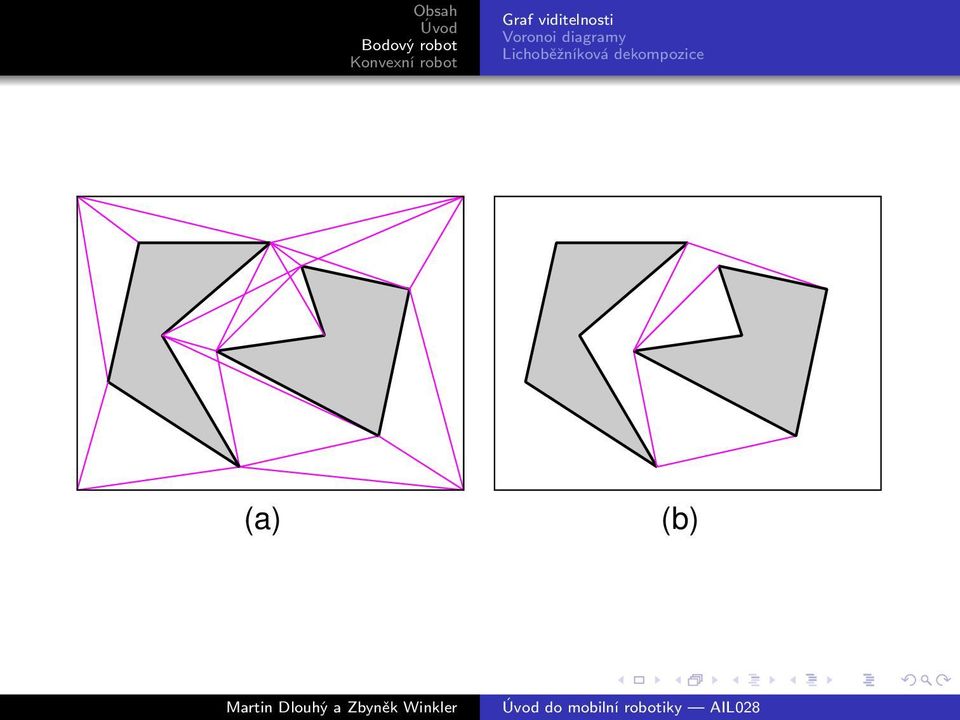
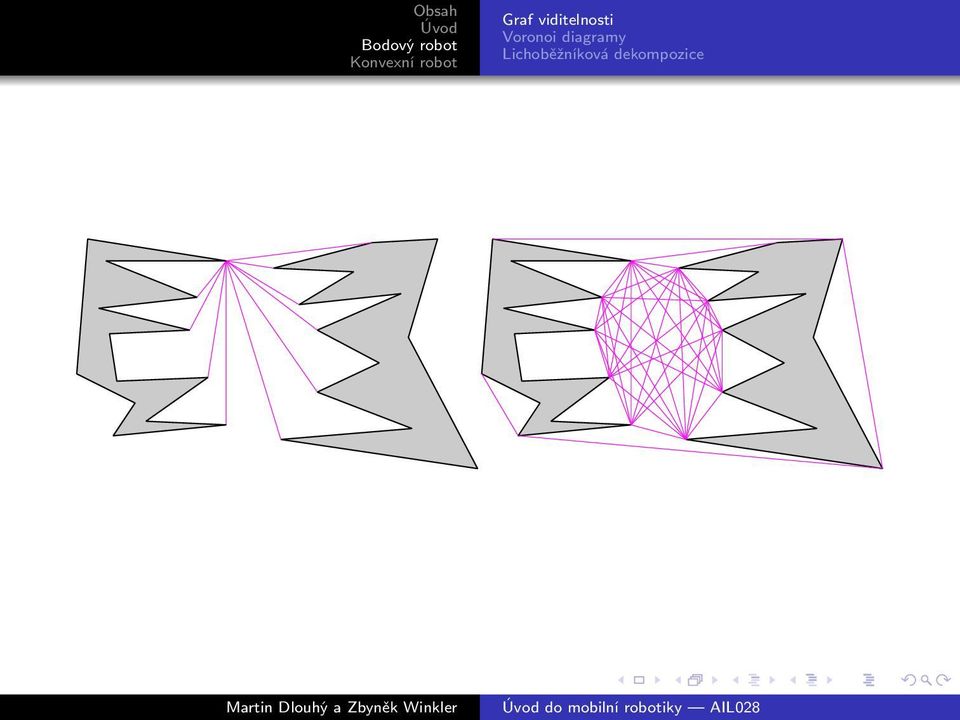
7 Obsah dva vrcholy jsou spojeny hranou, pokud jejich spojnice neprochází žádnou z překážek optimalizace pouze hrany, které mohou jít za roh hrana prodloužená o ɛ nesmí zasahovat do překážky naivní algoritmus O(n 3 ), sweep-line (koště) lepší nejkratší cesta nalezená v grafu je zároveň nejkratší možná pro původní problém

8 (a) (b)
9
10 Obr v lese Obsah obr (robot) = kružnice, stromy (překážky) = body obr je v lese, jak se dostane ven? kolik může přibrat (zhubnout)?

11 Obsah stromy se stanou řídícími body a rozdělí prostor do n oblastí každá oblast odpovídá právě jednomu řídícímu bodu body z oblasti mají nejblíže právě ke svému řídícímu bodu hranice oblastí Voronoi hrany stejná vzdálenost ke dvěma nejbližším překážkám při pohybu po hranách si udržujeme maximální možnou vzdálenost od překážek průchodnost hrany vzdálenost řídících bodů C C C D E B D E B D E B A (a) A (b) A (c)
 A (b) A")
12 Algoritmus pro cestu z lesa přejdi na síť např. směrem od nejbližší překážky hledej cestu v grafu pro nalezení nejširší cesty vybíráme vždy hranu s největší průchodností rozšíření pro polygony kromě řídících bodů i řídící úsečky hrany mohou být i kusy parabol (a) (b) (c)

13 Algoritmy pro konstrukci Voronoi diagramu nejlepší algoritmus O(n log n) rozděl & panuj Fortune s line sweep další vesměs O(n 2 ) inkrementální konverze z obecné triangulace
 inkrementální konverze z obecné")
14 rozdělit prostor na jednoduché buňky plánování uvnitř buňky je jednoduché cesta, je posloupnost buněk taková, že platí první buňka obsahuje start poslední buňka obsahuje cíl buňky v posloupnosti za sebou sdílí společnou hranu pro buňky lichoběžníkového tvaru to umíme v čase O(n log n)

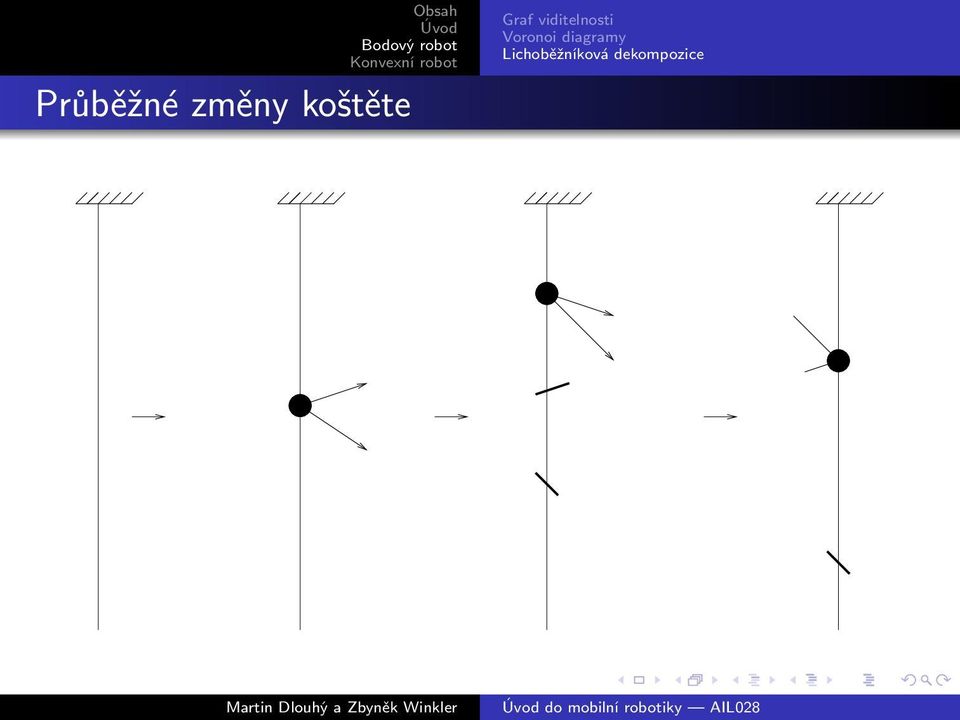
15 Algoritmus zametací přímky setřídit všechny vrcholy podle souřadnice x zametáme zleva doprava koštětem koště má svůj stav utříděný seznam úseček podle y-ové osy, které zrovna protíná. stav se mění pouze ve vrcholech (událost) při každé události je stav aktualizován nalezení levého/pravého konce hrany koresponduje přidání/smazání hrany při průchodu sestavujeme graf reprezentující sousednost buněk Složitost O(n log n) třídění O(n log n), jedna aktualizace stavu koštěte O(log n), počet aktualizací (bez průsečíků) O(n)
 třídění O(n")
16 Průběžné změny koštěte
17 Výsledná dekompozice Obsah

18 Obsah Plánování s otáčením co když robot není bezrozměrný bod ani kružnice? pro konvexního robota bez otáčení taky umíme nafouknout překážky

19 Plánování s otáčením problém žebříku Obsah Plánování s otáčením robot reprezentován úsečkou pro úsečku v jedné poloze lze použít lichoběžníkovou dekompozici spojenou s nafouknutím překážek v dalším kroku zkusíme úsečku pootočit topologický graf zůstává stejný po jisté době ale ke změně dojde (nějaký lichobežník zanikne, změní sousedy atp.) je možno spočítat pro 360 získáme složitější graf, ale s žebříkem můžeme i otáčet

20 Plánování s otáčením Změna topologického grafu při otáčení L4a L4 b L1a L1b L K L3a L3b L2a L2b L1a L2a L L4a L3a L1b L2b K L4b L3b

21 Ořez lichoběžníkových buněk Plánování s otáčením
22 Příště Obsah Pravděpodobnostní plánování jak naplánovat cestu pro auto bez couvání? a co couvání traktoru s několika přívěsy? nebo piáno v krápníkové jeskyni (3D nekonvexní objekt v 3D prostředí s otáčením)?
Úvod do mobilní robotiky AIL028
 zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 5. prosince 2005 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením (náznak řešení) Mapa světa - příklad Obsah Mapa
zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 5. prosince 2005 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením (náznak řešení) Mapa světa - příklad Obsah Mapa
Úvod do mobilní robotiky AIL028
 Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Voronoiův diagram. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta
 12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
Výpočetní geometrie Computational Geometry
 Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
Geometrické vyhledávání
 mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
Algoritmizace prostorových úloh
 Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Semestrální práce z předmětu KMA/MM. Voroneho diagramy
 Semestrální práce z předmětu KMA/MM Voroneho diagramy Jméno a příjmení: Lenka Skalová Osobní číslo: A08N0185P Studijní obor: Finanční informatika a statistika Datum: 22. 1. 2010 Obsah Obsah... 2 1 Historie...
Semestrální práce z předmětu KMA/MM Voroneho diagramy Jméno a příjmení: Lenka Skalová Osobní číslo: A08N0185P Studijní obor: Finanční informatika a statistika Datum: 22. 1. 2010 Obsah Obsah... 2 1 Historie...
PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO
 MASARYKOVA UNIVERZITA V BRNĚ FAKULTA INFORMATIKY PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO DIAGRAMŮ A DALŠÍCH PROSTŘEDKŮ VÝPOČETNÍ GEOMETRIE DIPLOMOVÁ PRÁCE ING. PETR ŠVEC 2006 Prohlášení Prohlašuji, že diplomová
MASARYKOVA UNIVERZITA V BRNĚ FAKULTA INFORMATIKY PLÁNOVÁNÍ TRASY ROBOTA POMOCÍ VORONÉHO DIAGRAMŮ A DALŠÍCH PROSTŘEDKŮ VÝPOČETNÍ GEOMETRIE DIPLOMOVÁ PRÁCE ING. PETR ŠVEC 2006 Prohlášení Prohlašuji, že diplomová
Triangulace. Význam triangulace. trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy. příklad triangulace
 Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Algoritmy používané ve výpočetní geometrii
 Algoritmy používané ve výpočetní geometrii Hrubá síla. Inkrementální metoda. Zametací přímka. Heuristiky. Rozděl a panuj. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
Algoritmy používané ve výpočetní geometrii Hrubá síla. Inkrementální metoda. Zametací přímka. Heuristiky. Rozděl a panuj. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vektorová data Michal Kačmařík, Daniela
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vektorová data Michal Kačmařík, Daniela
8. Geometrie vrací úder (sepsal Pavel Klavík)
") 8. Geometrie vrací úder (sepsal Pavel Klavík) Když s geometrickými problémy pořádně nezametete, ony vám to vrátí! Ale když užzametat,takurčitěnepodkoberecamístosmetákupoužijtepřímku.vtéto přednášce nás
8. Geometrie vrací úder (sepsal Pavel Klavík) Když s geometrickými problémy pořádně nezametete, ony vám to vrátí! Ale když užzametat,takurčitěnepodkoberecamístosmetákupoužijtepřímku.vtéto přednášce nás
Vzorce počítačové grafiky
 Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
Topologická kostra. Medial Axis. Straight Skeleton.
 Topologická kostra Medial Axis. Straight Skeleton. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Topologická kostra Medial Axis. Straight Skeleton. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Plánování pohybu mobilního robotu a skupiny mobilních robotů
 Plánování pohybu mobilního robotu a skupiny mobilních robotů Dr. rer. nat. Martin Saska (ČVUT v Praze) 4.března 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České
Plánování pohybu mobilního robotu a skupiny mobilních robotů Dr. rer. nat. Martin Saska (ČVUT v Praze) 4.března 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České
Geometrické vyhledání.
 Geometrické vyhledání. Ray algoritmus. Winding algoritmus. Lichoběžníkové (trapezoidální) mapy Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta
Geometrické vyhledání. Ray algoritmus. Winding algoritmus. Lichoběžníkové (trapezoidální) mapy Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta
VE 2D A 3D. Radek Výrut. Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského sumy
 25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
Datové struktury pro prostorové vyhledávání
 Datové struktury pro prostorové vyhledávání 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ SpatialData 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1
Datové struktury pro prostorové vyhledávání 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ SpatialData 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1
GIS Geografické informační systémy
 GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
autorovu srdci... Petr Hliněný, FI MU Brno 1 FI: MA010: Průnikové grafy
 9 Krátké povídání o průnikových grafech Od této lekce teorie grafů se zaměříme lehce na několik vybraných partíı teorie grafů bĺızkých autorovu srdci... Naším prvním výběrem jsou průnikové grafy, což jsou
9 Krátké povídání o průnikových grafech Od této lekce teorie grafů se zaměříme lehce na několik vybraných partíı teorie grafů bĺızkých autorovu srdci... Naším prvním výběrem jsou průnikové grafy, což jsou
Triangulace. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta.
 11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
Rastrová reprezentace
 Rastrová reprezentace Zaměřuje se na lokalitu jako na celek Používá se pro reprezentaci jevů, které plošně pokrývají celou oblast, případně se i spojitě mění. Používá se i pro rasterizované vektorové vrstvy,
Rastrová reprezentace Zaměřuje se na lokalitu jako na celek Používá se pro reprezentaci jevů, které plošně pokrývají celou oblast, případně se i spojitě mění. Používá se i pro rasterizované vektorové vrstvy,
Multirobotická kooperativní inspekce
 Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK
 FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
Voroného konstrukce na mapě světa
 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 Základní myšlenka Je dána konečná množina M bodů v rovině X (obecně v metrickém prostoru).
na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 na mapě světa Jan Ústav matematiky, FSI VUT, 7. 6. 2011 Základní myšlenka Je dána konečná množina M bodů v rovině X (obecně v metrickém prostoru).
PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh
 PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh Lomená čára A 0 A 1 A 2 A 3..., A n (n 2) se skládá z úseček A 0 A 1, A 1 A 2, A 2 A 3,..., A n 1 A n, z nichž každé dvě sousední mají společný jeden krajní
PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh Lomená čára A 0 A 1 A 2 A 3..., A n (n 2) se skládá z úseček A 0 A 1, A 1 A 2, A 2 A 3,..., A n 1 A n, z nichž každé dvě sousední mají společný jeden krajní
Je-li dána hranolová nebo jehlanová plocha s podstavou v rovině σ a rovina řezu ρ:
 Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
P L A N I M E T R I E
 M T E M T I K P L N I M E T R I E rovinná geometrie Základní planimetrické pojmy od - značí se velkými tiskacími písmeny, např.,,. P, Q. Přímka - značí se malými písmeny, např. a, b, p, q nebo pomocí bodů
M T E M T I K P L N I M E T R I E rovinná geometrie Základní planimetrické pojmy od - značí se velkými tiskacími písmeny, např.,,. P, Q. Přímka - značí se malými písmeny, např. a, b, p, q nebo pomocí bodů
ÚLOHY S POLYGONEM. Polygon řetězec úseček, poslední bod je totožný s prvním. 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU
 ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
1 Úvod 3. 2 Historie 4
 Obsah 1 Úvod 3 2 Historie 4 3 Definice a základní vlastnosti Voroneho diagramů v rovině 5 3.1 Struktura Voroneho buňky.................... 5 3.2 Hrany Voroneho diagramu.................... 6 3.3 Základní
Obsah 1 Úvod 3 2 Historie 4 3 Definice a základní vlastnosti Voroneho diagramů v rovině 5 3.1 Struktura Voroneho buňky.................... 5 3.2 Hrany Voroneho diagramu.................... 6 3.3 Základní
Gymnázium Jiřího Ortena, Kutná Hora. Průřezová témata Poznámky. Téma Školní výstupy Učivo (pojmy) volné rovnoběžné promítání průmětna
 volné rovnoběžné promítání průmětna") Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
Voroneho diagramy ZÁPADOČESKÁ UNIVERZITA. Semestrální práce z předmětu MM Matematické modelování FAKULTA APLIKOVANÝCH VĚD
 ZÁPADOČESKÁ UNIVERZITA FAKULTA APLIKOVANÝCH VĚD Semestrální práce z předmětu MM Matematické modelování Voroneho diagramy 20. ledna 2009 Petra Flajtingrová A08N0181P Obsah Obsah... 2 1. Historie Voroneho
ZÁPADOČESKÁ UNIVERZITA FAKULTA APLIKOVANÝCH VĚD Semestrální práce z předmětu MM Matematické modelování Voroneho diagramy 20. ledna 2009 Petra Flajtingrová A08N0181P Obsah Obsah... 2 1. Historie Voroneho
od zadaného bodu, vzdálenost. Bod je střed, je poloměr kružnice. Délka spojnice dvou bodů kružnice, která prochází středem
 Kružnice Kružnice je množina všech bodů roviny, které mají od zadaného bodu, vzdálenost. Bod je střed, je poloměr kružnice. Délka spojnice dvou bodů kružnice, která prochází středem je průměr kružnice.
Kružnice Kružnice je množina všech bodů roviny, které mají od zadaného bodu, vzdálenost. Bod je střed, je poloměr kružnice. Délka spojnice dvou bodů kružnice, která prochází středem je průměr kružnice.
GIS Geografické informační systémy
 GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
Elementární plochy-základní pojmy
 -základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
-základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
1.1 Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem
 Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Úvod do mobilní robotiky NAIL028
 md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
Text úlohy. Která barva nepatří do základních barev prostoru RGB? Vyberte jednu z nabízených možností: a. Černá b. Červená c. Modrá d.
 Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
Prohledávání do šířky = algoritmus vlny
 Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
Zdůvodněte, proč funkce n lg(n) roste alespoň stejně rychle nebo rychleji než než funkce lg(n!). Symbolem lg značíme logaritmus o základu 2.
 roste alespoň stejně rychle nebo rychleji než než funkce lg(n!). Symbolem lg značíme logaritmus o základu 2.") 1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 1 3 4 5 6 7 8 9 30 31 3 Zdůvodněte, proč funkce f(n) = n log(n) 1 n 1/ roste rychleji než funkce g(n) = n. Zdůvodněte, proč funkce f(n) = n 3/ log(n) roste
1 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 18 19 0 1 3 4 5 6 7 8 9 30 31 3 Zdůvodněte, proč funkce f(n) = n log(n) 1 n 1/ roste rychleji než funkce g(n) = n. Zdůvodněte, proč funkce f(n) = n 3/ log(n) roste
CVIČNÝ TEST 43. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 43 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST 1 bod 1 Pro a, b R + určete hodnotu výrazu ( a b) 2 ( a + b) 2, víte-li,
CVIČNÝ TEST 43 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST 1 bod 1 Pro a, b R + určete hodnotu výrazu ( a b) 2 ( a + b) 2, víte-li,
ALGORITMY A DATOVÉ STRUKTURY
 Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Geoinformatika. IX GIS modelování
 Geoinformatika IX GIS modelování jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Geoinformatika
Geoinformatika IX GIS modelování jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Geoinformatika
TGH06 - Hledání nejkratší cesty
 TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 26. března 2013 Motivační problémy Silniční sít reprezentovaná grafem. Najdi nejkratší/nejrychlejší cestu z místa A do místa
TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 26. března 2013 Motivační problémy Silniční sít reprezentovaná grafem. Najdi nejkratší/nejrychlejší cestu z místa A do místa
PROGRAMY PRO GIS. Formovat/formulovat problém pro aplikaci v počítači. Fungování GIS programů na základní úrovni - "uvažovat" jako počítač
 PROGRAMY PRO GIS Formovat/formulovat problém pro aplikaci v počítači Fungování GIS programů na základní úrovni - "uvažovat" jako počítač Jak počítače řeší problémy procesor central processing unit - CPU
PROGRAMY PRO GIS Formovat/formulovat problém pro aplikaci v počítači Fungování GIS programů na základní úrovni - "uvažovat" jako počítač Jak počítače řeší problémy procesor central processing unit - CPU
Algoritmy pro ořezávání 2D polygonů
 Algoritmy pro ořezávání 2D polygonů Využití ořezávání v praxi odstranění částí obrazu nacházejících se mimo zobrazitelnou oblast výstupního zařízení Využití ořezávání v praxi Vyplňování 3D objektů Vytvoření
Algoritmy pro ořezávání 2D polygonů Využití ořezávání v praxi odstranění částí obrazu nacházejících se mimo zobrazitelnou oblast výstupního zařízení Využití ořezávání v praxi Vyplňování 3D objektů Vytvoření
6. Základy výpočetní geometrie
 6. Základy výpočetní geometrie BI-EP1 Efektivní programování 1 ZS 2011/2012 Ing. Martin Kačer, Ph.D. 2010-11 Martin Kačer Katedra teoretické informatiky Fakulta informačních technologií České vysoké učení
6. Základy výpočetní geometrie BI-EP1 Efektivní programování 1 ZS 2011/2012 Ing. Martin Kačer, Ph.D. 2010-11 Martin Kačer Katedra teoretické informatiky Fakulta informačních technologií České vysoké učení
10. Analytická geometrie kuželoseček 1 bod
 10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
Základy informatiky. Teorie grafů. Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová
 Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
Úvod do mobilní robotiky NAIL028
 md at robotika.cz http://robotika.cz/guide/umor08/cs 13. ledna 2009 1 Zkoušky a zápočty Semor 2009 2 3 Motivace PolyBot Replicator Zkoušky a zápočty Semor 2009 Zkoušky a zápočty termíny každý Čt od 17:20
md at robotika.cz http://robotika.cz/guide/umor08/cs 13. ledna 2009 1 Zkoušky a zápočty Semor 2009 2 3 Motivace PolyBot Replicator Zkoušky a zápočty Semor 2009 Zkoušky a zápočty termíny každý Čt od 17:20
Lekce 01 Úvod do algoritmizace
 Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
Počítačové laboratoře bez tajemství aneb naučme se učit algoritmizaci a programování s využitím robotů Lekce 01 Úvod do algoritmizace Tento projekt CZ.1.07/1.3.12/04.0006 je spolufinancován Evropským sociálním
Výpočetní geometrie. Pavel Strachota. 9. listopadu FJFI ČVUT v Praze
 Výpočetní geometrie Pavel Strachota FJFI ČVUT v Praze 9. listopadu 2012 Obsah 1 Úvod 2 Jednoduché algoritmy výpočetní geometrie 3 Další problémy výpočetní geometrie Obsah 1 Úvod 2 Jednoduché algoritmy
Výpočetní geometrie Pavel Strachota FJFI ČVUT v Praze 9. listopadu 2012 Obsah 1 Úvod 2 Jednoduché algoritmy výpočetní geometrie 3 Další problémy výpočetní geometrie Obsah 1 Úvod 2 Jednoduché algoritmy
JEVIŠTNÍ PERSPEKTIVA TABULKA 19
 OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
VK CZ.1.07/2.2.00/
 Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Realita versus data GIS
 http://www.indiana.edu/ Realita versus data GIS Data v GIS Typy dat prostorová (poloha a vzájemné vztahy) popisná (atributy) Reprezentace prostorových dat (formát) rastrová Spojitý konceptuální model vektorová
http://www.indiana.edu/ Realita versus data GIS Data v GIS Typy dat prostorová (poloha a vzájemné vztahy) popisná (atributy) Reprezentace prostorových dat (formát) rastrová Spojitý konceptuální model vektorová
MATEMATIKA Tematické okruhy ke státní maturitní zkoušce Obor: mechanik elektronik
 MATEMATIKA Tematické okruhy ke státní maturitní zkoušce Obor: mechanik elektronik R4 1. ČÍSELNÉ VÝRAZY 1.1. Přirozená čísla počítání s přirozenými čísly, rozlišit prvočíslo a číslo složené, rozložit složené
MATEMATIKA Tematické okruhy ke státní maturitní zkoušce Obor: mechanik elektronik R4 1. ČÍSELNÉ VÝRAZY 1.1. Přirozená čísla počítání s přirozenými čísly, rozlišit prvočíslo a číslo složené, rozložit složené
Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na. x 2 x 1
 Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly.
, prostá cykloida, prostá epicykloida, úpatnice paraboly.") Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Problém obchodního cestujícího(tsp) Vstup: Množina n měst a vzdálenosti mezi nimi. Výstup: Nejkratší okružní cesta procházející všemi městy.
 Vstup: Množina n měst a vzdálenosti mezi nimi. Výstup: Nejkratší okružní cesta procházející všemi městy.") Problém obchodního cestujícího(tsp) Vstup: Množina n měst a vzdálenosti mezi nimi. Výstup: Nejkratší okružní cesta procházející všemi městy. Poznámka:Slovem okružní myslíme,žecestakončívestejném městě,
Problém obchodního cestujícího(tsp) Vstup: Množina n měst a vzdálenosti mezi nimi. Výstup: Nejkratší okružní cesta procházející všemi městy. Poznámka:Slovem okružní myslíme,žecestakončívestejném městě,
Algoritmy výpočetní geometrie
 Algoritmy výpočetní geometrie prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Algoritmy výpočetní geometrie prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Obrázek 34: Vznik středové kolineace
 6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
HVrchlík DVrchlík. Anuloid Hrana 3D síť
 TVORBA PLOCH Plochy mají oproti 3D drátovým modelům velkou výhodu, pro snadnější vizualizaci modelů můžeme skrýt zadní plochy a vytvořit stínované obrázky. Plochy dále umožňují vytvoření neobvyklých tvarů.
TVORBA PLOCH Plochy mají oproti 3D drátovým modelům velkou výhodu, pro snadnější vizualizaci modelů můžeme skrýt zadní plochy a vytvořit stínované obrázky. Plochy dále umožňují vytvoření neobvyklých tvarů.
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Vzdálenost uzlů v neorientovaném grafu
 Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
Kartografické modelování. VIII Modelování vzdálenosti
 VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
17 Kuželosečky a přímky
 17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
8 Přednáška z
 8 Přednáška z 3 12 2003 Problém minimální kostry: Dostaneme souvislý graf G = (V, E), w : E R + Našim úkolem je nalézt strom (V, E ) tak, aby výraz e E w(e) nabýval minimální hodnoty Řešení - Hladový (greedy)
8 Přednáška z 3 12 2003 Problém minimální kostry: Dostaneme souvislý graf G = (V, E), w : E R + Našim úkolem je nalézt strom (V, E ) tak, aby výraz e E w(e) nabýval minimální hodnoty Řešení - Hladový (greedy)
Úvod do výpočetní geometrie. Základní vztahy.
 Úvod do výpočetní geometrie. Základní vztahy. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Úvod do výpočetní geometrie. Základní vztahy. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
4.3.2 Goniometrické nerovnice
 4 Goniometrické nerovnice Předpoklady: 40 Pedagogická poznámka: Nerovnice je stejně jako rovnice možné řešit grafem i jednotkovou kružnicí Oba způsoby mají své výhody i nevýhody a jsou v podstatě rovnocenné
4 Goniometrické nerovnice Předpoklady: 40 Pedagogická poznámka: Nerovnice je stejně jako rovnice možné řešit grafem i jednotkovou kružnicí Oba způsoby mají své výhody i nevýhody a jsou v podstatě rovnocenné
2. Vyšetřete všechny možné případy vzájemné polohy tří různých přímek ležících v jedné rovině.
 ZS1BK_PGE1 Geometrie I: Vybrané úlohy z elementární geometrie 1. Které geometrické útvary mohou vzniknout a) jako průnik dvou polopřímek téže přímky, b) jako průnik dvou polorovin téže roviny? V případě
ZS1BK_PGE1 Geometrie I: Vybrané úlohy z elementární geometrie 1. Které geometrické útvary mohou vzniknout a) jako průnik dvou polopřímek téže přímky, b) jako průnik dvou polorovin téže roviny? V případě
TGH06 - Hledání nejkratší cesty
 TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 31. března 2015 Motivační problémy Silniční sít reprezentovaná grafem. Ohodnocené hrany - délky silnic. Najdi nejkratší/nejrychlejší
TGH06 - Hledání nejkratší cesty Jan Březina Technical University of Liberec 31. března 2015 Motivační problémy Silniční sít reprezentovaná grafem. Ohodnocené hrany - délky silnic. Najdi nejkratší/nejrychlejší
9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy. Vyučující: Ing. Jan Pacina, Ph.D.
 9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Lehký úvod Digitální modely terénu jsou dnes v geoinformačních systémech
9. přednáška z předmětu GIS1 Digitální model reliéfu a odvozené povrchy Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Lehký úvod Digitální modely terénu jsou dnes v geoinformačních systémech
c jestliže pro kladná čísla a,b,c platí 3a = 2b a 3b = 5c.
 Úloha 1 1 b. Od součtu neznámého čísla a čísla 17 odečteme rozdíl těchto čísel v daném pořadí. Vypočtěte a zapište výsledek v. Úloha 2 1 b. 25 Na číselné ose jsou obrazy čísel 0 a 1 vzdáleny 5 mm. Určete
Úloha 1 1 b. Od součtu neznámého čísla a čísla 17 odečteme rozdíl těchto čísel v daném pořadí. Vypočtěte a zapište výsledek v. Úloha 2 1 b. 25 Na číselné ose jsou obrazy čísel 0 a 1 vzdáleny 5 mm. Určete
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vývojové diagramy Daniela Szturcová
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Vývojové diagramy Daniela Szturcová
MATEMATIKA Maturitní témata společná část MZ základní úroveň (vychází z Katalogu požadavků MŠMT)
") MATEMATIKA Maturitní témata společná část MZ základní úroveň (vychází z Katalogu požadavků MŠMT) 1. Číselné obory 1.1 Přirozená čísla provádět aritmetické operace s přirozenými čísly rozlišit prvočíslo
MATEMATIKA Maturitní témata společná část MZ základní úroveň (vychází z Katalogu požadavků MŠMT) 1. Číselné obory 1.1 Přirozená čísla provádět aritmetické operace s přirozenými čísly rozlišit prvočíslo
1 Úvod 5. 2 Historie Georgij Feodosjevič Voronoj Historie Voroného diagramu Konstrukce 7. 5 Jak vypadají Voroného diagramy 9
 Matematické modelování VORONÉHO DIAGRAMY Oldřich Petřík Osobní číslo: Obor: e-mail: A07065 Počítačová grafika a výpočetní systémy opetrik@students.zcu.cz Datum odevzdání: 7.3.2008 Obsah 1 Úvod 5 2 Historie
Matematické modelování VORONÉHO DIAGRAMY Oldřich Petřík Osobní číslo: Obor: e-mail: A07065 Počítačová grafika a výpočetní systémy opetrik@students.zcu.cz Datum odevzdání: 7.3.2008 Obsah 1 Úvod 5 2 Historie
Kapitola 11. Vzdálenost v grafech. 11.1 Matice sousednosti a počty sledů
 Kapitola 11 Vzdálenost v grafech V každém grafu lze přirozeným způsobem definovat vzdálenost libovolné dvojice vrcholů. Hlavním výsledkem této kapitoly je překvapivé tvrzení, podle kterého lze vzdálenosti
Kapitola 11 Vzdálenost v grafech V každém grafu lze přirozeným způsobem definovat vzdálenost libovolné dvojice vrcholů. Hlavním výsledkem této kapitoly je překvapivé tvrzení, podle kterého lze vzdálenosti
100 1500 1200 1000 875 750 675 600 550 500 - - 775 650 550 500 450 400 350 325 - -
 Prostý kružnicový oblouk Prostý kružnicový oblouk se používá buď jako samostatné řešení změny směru osy nebo nám slouží jako součást směrové změny v kombinaci s přechodnicemi nebo složenými oblouky. Nejmenší
Prostý kružnicový oblouk Prostý kružnicový oblouk se používá buď jako samostatné řešení změny směru osy nebo nám slouží jako součást směrové změny v kombinaci s přechodnicemi nebo složenými oblouky. Nejmenší
Omezíme se jen na lomené čáry, jejichž nesousední strany nemají společný bod. Jestliže A 0 = A n (pro n 2), nazývá se lomená čára uzavřená.
, nazývá se lomená čára uzavřená.") MNOHOÚHELNÍKY Vlastnosti mnohoúhelníků Lomená čára C 0 C C C 3 C 4 protíná samu sebe. Lomená čára A 0 A A... A n- A n (n ) se skládá z úseček A 0 A, A A,..., A n- A n, z nichž každé dvě sousední mají společný
MNOHOÚHELNÍKY Vlastnosti mnohoúhelníků Lomená čára C 0 C C C 3 C 4 protíná samu sebe. Lomená čára A 0 A A... A n- A n (n ) se skládá z úseček A 0 A, A A,..., A n- A n, z nichž každé dvě sousední mají společný
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Souřadnicové konstrukce
 Příprava na hodinu matematiky Souřadnicové konstrukce Radka Nevrlová a Markéta Vachulová Třída: 5. Časová dotace: 45 minut Cíle: Žáci si zopakují zápis souřadnicových konstrukcí pomocí souřadnic se šipkami.
Příprava na hodinu matematiky Souřadnicové konstrukce Radka Nevrlová a Markéta Vachulová Třída: 5. Časová dotace: 45 minut Cíle: Žáci si zopakují zápis souřadnicových konstrukcí pomocí souřadnic se šipkami.
GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6
 UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6 Lubomír Vašek Zlín 2013 Obsah... 3 1. Základní pojmy... 3 2. Princip rastrové reprezentace... 3 2.1 Užívané
UNIVERZITA TOMÁŠE BATI VE ZLÍNĚ FAKULTA APLIKOVANÉ INFORMATIKY GEOGRAFICKÉ INFORMAČNÍ SYSTÉMY 6 Lubomír Vašek Zlín 2013 Obsah... 3 1. Základní pojmy... 3 2. Princip rastrové reprezentace... 3 2.1 Užívané
Konvexní útvary. Kapitola 4. Opěrné roviny konvexního útvaru v prostoru
 Konvexní útvary Kapitola 4. Opěrné roviny konvexního útvaru v prostoru In: Jan Vyšín (author): Konvexní útvary. (Czech). Praha: Mladá fronta, 1964. pp. 49 55. Persistent URL: http://dml.cz/dmlcz/403505
Konvexní útvary Kapitola 4. Opěrné roviny konvexního útvaru v prostoru In: Jan Vyšín (author): Konvexní útvary. (Czech). Praha: Mladá fronta, 1964. pp. 49 55. Persistent URL: http://dml.cz/dmlcz/403505
Klasifikace podle nejbližších sousedů Nearest Neighbour Classification [k-nn]
![Klasifikace podle nejbližších sousedů Nearest Neighbour Classification [k-nn]](/thumbs/93/111339850.jpg "Klasifikace podle nejbližších sousedů Nearest Neighbour Classification [k-nn]") Klasifikace podle nejbližších sousedů Nearest Neighbour Classification [k-nn] Michal Houdek, Tomáš Svoboda, Tomáš Procházka 6. června 2001 1 Obsah 1 Úvod 3 2 Definice a postup klasifikace 3 3 Příklady
Klasifikace podle nejbližších sousedů Nearest Neighbour Classification [k-nn] Michal Houdek, Tomáš Svoboda, Tomáš Procházka 6. června 2001 1 Obsah 1 Úvod 3 2 Definice a postup klasifikace 3 3 Příklady
7.5.3 Hledání kružnic II
 753 Hledání kružnic II Předpoklady: 750 Pedagogická poznámka: Tato hodina patří mezi vůbec nejtěžší Není reálné předpokládat, že by většina studentů dokázala samostatně přijít na řešení, po čase na rozmyšlenou
753 Hledání kružnic II Předpoklady: 750 Pedagogická poznámka: Tato hodina patří mezi vůbec nejtěžší Není reálné předpokládat, že by většina studentů dokázala samostatně přijít na řešení, po čase na rozmyšlenou
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Matematika (MAT) Náplň: Rovnice a nerovnice, Kruhy a válce, Úměrnost, Geometrické konstrukce, Výrazy 2 Třída: Tercie Počet hodin: 4 hodiny týdně Pomůcky: Učebna s PC a dataprojektorem (interaktivní
Předmět: Matematika (MAT) Náplň: Rovnice a nerovnice, Kruhy a válce, Úměrnost, Geometrické konstrukce, Výrazy 2 Třída: Tercie Počet hodin: 4 hodiny týdně Pomůcky: Učebna s PC a dataprojektorem (interaktivní
Intervalové stromy. Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme. 1. Změna jednoho čísla v posloupnosti.
 Intervalové stromy Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme průběžně provádět tyto dvě operace: 1. Změna jednoho čísla v posloupnosti. 2. Zjištění součtu čísel
Intervalové stromy Představme si, že máme posloupnost celých čísel p 0, p 1,... p N 1, se kterou budeme průběžně provádět tyto dvě operace: 1. Změna jednoho čísla v posloupnosti. 2. Zjištění součtu čísel
Několik úloh z geometrie jednoduchých těles
 Několik úloh z geometrie jednoduchých těles Úlohy ke cvičení In: F. Hradecký (author); Milan Koman (author); Jan Vyšín (author): Několik úloh z geometrie jednoduchých těles. (Czech). Praha: Mladá fronta,
Několik úloh z geometrie jednoduchých těles Úlohy ke cvičení In: F. Hradecký (author); Milan Koman (author); Jan Vyšín (author): Několik úloh z geometrie jednoduchých těles. (Czech). Praha: Mladá fronta,
5. P L A N I M E T R I E
 5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
MATEMATIKA 5. TŘÍDA. C) Tabulky, grafy, diagramy 1 - Tabulky, doplnění řady čísel podle závislosti 2 - Grafy, jízní řády 3 - Magické čtverce
 Tabulky, grafy, diagramy 1 - Tabulky, doplnění řady čísel podle závislosti 2 - Grafy, jízní řády 3 - Magické čtverce") MATEMATIKA 5. TŘÍDA 1 - Přirozená čísla a číslo nula a číselná osa, porovnávání b zaokrouhlování c zápis čísla v desítkové soustavě d součet, rozdíl e násobek, činitel, součin f dělení, dělení se zbytkem
MATEMATIKA 5. TŘÍDA 1 - Přirozená čísla a číslo nula a číselná osa, porovnávání b zaokrouhlování c zápis čísla v desítkové soustavě d součet, rozdíl e násobek, činitel, součin f dělení, dělení se zbytkem
Popis základního prostředí programu AutoCAD
 Popis základního prostředí programu AutoCAD Popis základního prostředí programu AutoCAD CÍL KAPITOLY: CO POTŘEBUJETE ZNÁT, NEŽ ZAČNETE PRACOVAT Vysvětlení základních pojmů: Okno programu AutoCAD Roletová
Popis základního prostředí programu AutoCAD Popis základního prostředí programu AutoCAD CÍL KAPITOLY: CO POTŘEBUJETE ZNÁT, NEŽ ZAČNETE PRACOVAT Vysvětlení základních pojmů: Okno programu AutoCAD Roletová
KŘIVKY A PLOCHY. Obrázky (popř. slajdy) převzaty od
 převzaty od") KŘIVKY A PLOCHY JANA ŠTANCLOVÁ jana.stanclova@ruk.cuni.cz Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah matematický popis křivek a ploch křivky v rovině implicitní tvar
KŘIVKY A PLOCHY JANA ŠTANCLOVÁ jana.stanclova@ruk.cuni.cz Obrázky (popř. slajdy) převzaty od RNDr. Josef Pelikán, CSc., KSVI MFF UK Obsah matematický popis křivek a ploch křivky v rovině implicitní tvar
DobSort. Úvod do programování. DobSort Implementace 1/3. DobSort Implementace 2/3. DobSort - Příklad. DobSort Implementace 3/3
 DobSort Úvod do programování Michal Krátký 1,Jiří Dvorský 1 1 Katedra informatiky VŠB Technická univerzita Ostrava Úvod do programování, 2004/2005 V roce 1980 navrhl Dobosiewicz variantu (tzv. DobSort),
DobSort Úvod do programování Michal Krátký 1,Jiří Dvorský 1 1 Katedra informatiky VŠB Technická univerzita Ostrava Úvod do programování, 2004/2005 V roce 1980 navrhl Dobosiewicz variantu (tzv. DobSort),
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Hierarchický model. 1995-2013 Josef Pelikán CGG MFF UK Praha. pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16
 Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE