ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE
|
|
|
- Daniel Prokop
- před 8 lety
- Počet zobrazení:
Transkript
1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE PRAHA 2013 Martin Tröstl
2 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE Vedoucí práce Ing. Jindřich HODAČ, Ph.D. Katedra geomatiky PROSINEC 2013 Martin TRÖSTL
3 Zadání diplomové práce
4 ABSTRAKT V této diplomové práci jsou testovány různé vlivy na kvalitu fotoplánu vytvořeného pomocí jednoho snímku. Testování je prováděno na základě geodeticky zaměřeného testovacího pole. Důraz je kladen na testování přesnosti různých způsobů odstranění distorze, která má na přesnost výsledného fotoplánu velmi významný vliv. Dále je testován vliv konfigurace vlícovacích bodů. Okrajově je hodnocena i obrazová kvalita fotoplánů. Pro testování je využíváno značné množství programů. Konečný výpočet fotoplánu je prováděn v programu SIMphoto. KLÍČOVÁ SLOVA Fotoplán, SIMphoto, testovací pole, přesnost, kalibrace, konfigurace vlícovacích bodů, odstranění distorze ABSTRACT The thesis tests various influences on the quality of a photomap made by one exposure. The testing is carried out on the basis of the geodetically focused testing pole. The emphasis is placed on accuracy of different methods of removing distortion, which has high influence on accuracy of the resulting photomap. Then, the influence of control points configuration is tested. Pictorial quality of photomaps is evaluated marginally. A high number of programs is used for testing. The final calculation of the photomap is carried out in SIMphoto program. KEYWORDS Photomap, SIMphoto, test field, accuracy, calibration, removal of distortions, points configuration
5 Čestné prohlášení Prohlašuji, že jsem tuto diplomovou práci vypracoval samostatně, pouze za odborného vedení vedoucího diplomové práce Ing. Jindřicha Hodače, Ph.D. Dále prohlašuji, že veškeré podklady, ze kterých jsem čerpal, jsou uvedeny v seznamu použité literatury. Datum: Martin Tröstl
6 PODĚKOVÁNÍ Rád bych poděkoval vedoucímu diplomové práce za odborné vedení a pomoc při zpracování této práce. Dále bych chtěl poděkovat své rodině za podporu při tvorbě diplomové práce i během celého studia.
7 Obsah 1 Úvod Technologie testování Teorie tvorby fotoplánu Tvorba fotoplánu v SW SIMphoto Vlastní testování Testování odstranění distorze Testování vlivu konfigurace vlícovacích bodů Použité přístroje Použité fotoaparáty Canon EOS 5D Mark II Canon EOS 450D Totální stanice Trimble 3603 DR Testovací pole Zaměření testovacího pole Výpočet souřadnic Zhodnocení přesnosti souřadnic Snímkování + postprocesing Snímkování Postprocesing Vliv hloubkové členitosti Způsoby odstranění distorze Teorie distorze Radiální distorze Tangenciální distorze Matematické modely pro odstranění distorze Distorzní model podle Duane C. Browna PanoTools distorzní model Jednoduché distorzní modely používající posuvníky Testování snímků bez korekce distorze
8 7.4 Korektní výpočet kalibrace PhotoModeler Scanner Agisoft Hugin Zhodnocení přesnosti odstranění distorze pomocí kalibrace Databáze distorzních modelů Firemní software Grafické editory využívající databázi objektivů Zhodnocení přesnosti odstranění distorze pomocí databáze objektivů Automatické odstranění distorze Adobe Photoshop Lightroom Odstranění distorze v přístroji Odstranění distorze pomocí jezdce Testování vlivu konfigurace vlícovacích bodů Obrazová kvalita fotoplánů Závěr Seznam použité literatury Seznam příloh
9 1 Úvod Předmětem této diplomové práce je shromáždění informací o možnostech vytvoření přesného fotoplánu za ne zcela optimálních podmínek. Tato práce navazuje na mou bakalářskou práci [1] a využívá dat a závěrů, které z ní vyplývají. Při tvorbě fotoplánu závisí výsledná kvalita na konfiguraci a kvalitě původního snímku, postprocesingu, odstranění distorze, počtu, kvalitě a rozmístění vlícovacích bodů. Dalším negativním vlivem na kvalitu fotoplánu je hloubkové členění snímaného objektu, jehož působení je dobře matematicky popsané. Diplomová práce je přednostně určena pro tvůrce fotoplánů, kteří nemají ideální podmínky pro pořizování snímků. Jsou omezeni kvalitou použitého objektivu, který často trpí vysokým geometrickým zkreslením - distorzí. Dalším důležitým parametrem je snímací vzdálenost od objektu. Tvůrce fotoplánu je často nucen vzhledem k blízkosti překážek při snímání (blízkost stromů) nebo při snímání fresek v úzké místnosti použít širokoúhlé nastavení objektivu a snímat z krátké vzdálenosti. Širokoúhlé nastavení pak často u méně kvalitních objektivů znamená vyšší geometrické zkreslení a další negativní vlivy. Jednotlivé metody zpřesnění fotoplánu jsou zkoumány pomocí geodeticky zaměřeného testovacího pole. Jako testovací pole je stejně jako v bakalářské práci využita stěna Fakulty architektury a Fakulty informačních technologií ČVUT. Výsledkem testování jsou souřadnicové odchylky mezi souřadnicemi sejmutými z fotoplánu a souřadnicemi zaměřenými geodeticky. Ty jsou zapsány do tabulek a jsou z nich vytvořeny grafy. Z těchto tabulek a grafů jsou poté vyvozovány závěry o přesnosti dané technologie tvorby fotoplánů. Závěrem této diplomové práce by mělo být doporučení, jak postupovat při tvorbě přesného fotoplánu za nepříznivých podmínek při snímkování a při omezených možnostech zaměření vlícovacích bodů. 8
10 2 Technologie testování V této práci jsou testovány pro použité objektivy především extrémní případy minimální zoom. V těchto případech lze očekávat vyšší vliv geometrického zkreslení a nižší obrazovou kvalitu snímků. Testování vlivů na přesnost fotoplánu je provedeno pomocí přesně zaměřeného testovacího pole. Nejprve je tedy z různě editovaných snímků vytvořen fotoplán a následně je testována jeho přesnost na základě souřadnicových odchylek mezi souřadnicemi fotoplánu a souřadnicemi pole určenými geodetickým zaměřením. 2.1 Teorie tvorby fotoplánu Tvorba fotoplánu patří mezi základní úlohy jednosnímkové fotogrammetrie. Jedná se o vztah mezi dvěma rovinami zprostředkovaný určením vlícovacích bodů. Za předpokladu, že mapovaný objekt je rovinný a dokonale kolmý na osu záběru snímku, je vztah mezi snímkem a mapou jednoduchý. Liší se pouze měřítkem. Ve většině případů však pracujeme se snímkem opatřeným v obecné poloze. Potom využijeme geometrický vztah mezi dvěma rovinami, který je též označován jako Pappova věta: Dvojpoměr čtveřice bodové nebo paprskové zústává v rovině mapy i snímku zachován. A1C B1C A D B D 1 A2C B2C = A D B 2 2 D Obr. 2.1: Grafické vyjádření Pappovy věty 9
11 10 Matematickým vyjádřením této skutečnosti pro samotný výpočet je kolineární transformace mezi snímkem a fotoplánem. Jedná se o transformaci, ve které přecházíme z 3D do 2D. Kolineární transformace je dána rovnicemi: ˆ ˆ ˆ ˆ ˆ ˆ c y c x c a y a x a X = ˆ ˆ ˆ ˆ ˆ ˆ c y c x c b y b x b Y = kde X,Y jsou souřadnice fotoplánu, x,y jsou snímkové souřadnice, ˆ, ˆ, ˆ, ˆ, ˆ, ˆ, ˆ, ˆ c c c b b a a a jsou transformační parametry. Dohromady mají tyto rovnice 9 neznámých hodnot(parametrů transformace). Přistoupíme-li však k substituci a každou konstantu vydělíme hodnotou 3 ĉ, získáme nové rovnice: = y c x c a y a x a X, = y c x c b y b x b Y, kde ,,,,,, c c b b a a a jsou transformační parametry. Tyto vztahy již obsahují pouze 8 neznámých hodnot a umožňují transformaci (tvorbu fotoplánu) pomocí jen čtyř vlícovacích bodů. V rovnicích nejsou obsaženy žádné fotogrammetrické proměnné či konstanty (ohnisková vzdálenost, úhly rotací,...). K tvorbě fotoplánu tedy stačí mít jakýkoli snímek s nízkou distorzí. Čerpáno z [2].

12 2.2 Tvorba fotoplánu v SW SIMphoto Stejně jako v mé bakalářské práci byla pro tvorbu fotoplánů využita aplikace SIMphoto. Jedná se o volně šiřitelný program vytvořený v rámci diplomové práce ing. Davida Čížka. Tento software je prvotně určen k dokumentaci historických objektů odborníky z památkové péče. SIMphoto umožňuje editaci rastrových obrazů ve formátu JPEG a TIFF. Obr. 2.2: Pracovní prostředí programu SIMphoto Fotoplán může být vytvořen na základě známých souřadnic vlícovacích bodů nebo z jednoduché sítě měřených délek. Postup tvorby fotoplánu 1) Načtení snímku Snímek určený pro tvorbu fotoplánu načteme pomocí volby [snímek]-[načíst snímek] nebo pomocí ikony.. 11
13 2) Oprava distorze V programu je možnost odstranění distorze pomocí parametrů distorze získaných při kalibraci v programu PhotoModeler. O této možnosti je více psáno v podkapitole ) Tvorba fotoplánu V této práci byly všechny fotoplány vytvořeny na základě geodeticky zaměřených vlícovacích bodů. Možnost této metody najdeme pod volbami [Fotoplán]-[Metoda zaměření vlícovacích bodů]. Zde je možné spustit snímání, označit na snímcích vlícovací body (určit pixelové souřadnice) a po otevření tabulky bodů určit jejich výsledné souřadnice na fotoplánu. Program umožňuje při nadbytečném počtu vlícovacích bodů zobrazení oprav určených vyrovnáním. Transformační tabulku je možné uložit do textového souboru. Kliknutím na pole [Transformovat] se zobrazí okno s dotazem na výslednou velikost pixelu. Po zadání její hodnoty můžeme provést výpočet fotoplánu. 4) Editace a možnosti fotoplánu Program umožňuje některé další jednoduché úpravy fotoplánu - jeho otočení, změnu velikosti pixelu či přidání grafického měřítka. Na vytvořeném fotoplánu je možné odečítat souřadnice, které se zobrazují v levém dolním rohu pracovní plochy. Také je zde možnost měření vzdáleností. 5) Uložení fotoplánu Vytvořený fotoplán je možné uložit ve formátu JPEG nebo TIFF. Další možností je tisk fotoplánu do PDF. Tato volba umožňuje tisk dokumentu v požadovaném měřítku, přidání názvu a popisu grafu. V této práci byla využita možnost tvorby fotoplánu na základě zaměřených vlícovacích bodů. Při tvorbě plánů byly vždy ukládány transformační tabulky, které jsou uvedeny v přílohách na DVD. Velikost pixelu byla volena 2,5 mm. Fotoplány nebyly dále editovány. Uloženy byly ve formátu JPEG. Čerpáno z [5] a [6]. 12
14 2.3 Vlastní testování V této práci bylo provedeno testování přesnosti odstranění distorze a testování vlivu konfigurace vlícovacích bodů při tvorbě fotoplánu. Při práci bylo vytvořeno mnoho fotoplánů, ze kterých lze vyvozovat i další závěry, jako je posouzení kvality obrazu při využívání různých programů pro odstranění distorze nebo vliv použité konfigurace při snímkování Testování odstranění distorze Přesnost odstranění distorze byla testována pomocí geodeticky zaměřeného testovacího pole. Po odstranění distorze jednotlivými metodami byl ze získaného opraveného snímku vytvořen v programu SIMphoto fotoplán pomocí šesti vlícovacích bodů. Ve stejném programu byl ve fotoplánu proveden odečet souřadnic bodů testovacího pole. Rozdíl mezi fotogrammetricky určenými souřadnicemi a souřadnicemi určenými přesným geodetickým zaměřením tvoří souřadnicové odchylky, charakterizující přesnost testovaného fotoplánu. Souřadnicové odchylky byly poté zaznamenány do tabulek a grafů pro možnost zhodnocení. Při testování je uvažováno geodetické zaměření testovacího pole jako absolutně přesné. Tabulky Získané souřadnicové odchylky mezi fotogrammetricky určenými souřadnicemi bodů a geodeticky určenými souřadnicemi bodů testovacího pole byly zapsány do tabulek v programu MS Office Excel. Zde byly také vypočteny směrodatné odchylky souřadnicové v ose X a Y podle vztahů: kde [ v v ] x x sx =, n vx a v y jsou souřadnicové odchylky v ose X a Y, [ v v ] s = y n, y y n je počet souřadnicových odchylek. 13
15 Přesnost je tedy možné hodnotit pomocí velikosti jednotlivých souřadnicových odchylek, jejich maximální hodnoty a směrodatné odchylky v souřadnici. Další tabulkou vypovídající o přesnosti fotoplánu je transformační tabulka použitá při tvorbě fotoplánu v programu SIMphoto. Pro výpočet kolineární transformace je nutný počet 4 vlícovacích bodů. Při testování přesnosti kalibrace bylo využíváno 6 vlícovacích bodů a došlo k vyrovnání. V transformační tabulce jsou pak uvedeny příslušné opravy, ze kterých je též možné posoudit přesnost. Tabuky jsou součástí DVD příloh [VI]. Grafy Souřadnicové odchylky byly pro možnost grafického zhodnocení vyneseny do grafů v aplikaci MicroStation. Na podkladu stěny tvořící testovací pole byly zobrazeny body tohoto pole a jejich souřadnicové odchylky v podobě vektorů ve směru os X a Y. Odchylky zobrazují posun bodu ve fotoplánu oproti hodnotám očekávaným (hodnotám geodetického zaměření). Vlícovací body použité při tvorbě fotoplánu jsou pro odlišení zobrazeny modrou barvou. Pro zobrazení byla zvolena dvě měřítka, která jsou volena tak, aby bylo možné výsledky hodnotit. Použité grafické měřítko je zobrazeno ve spodní a v levé části grafu. Každý graf je opatřen popisem uvádějícím použitý fotoaparát, objektiv a způsob odstranění distorze. Vytvořené grafy jsou uvedeny v příloze č. 2 a v DVD příloze [VII] Testování vlivu konfigurace vlícovacích bodů Testování vlivu konfigurace vlícovacích bodů na přesnost fotoplánu bylo provedeno též pomocí testovacího pole. Fotoplány byly vytvořeny vždy pomocí 4 vlícovacích bodů rozmístěných: a) po celém testovacím poli b) ve třetině testovacího pole c) v šestině testovacího pole d) v jedné dvanáctině testovacího pole 14
16 Testování bylo provedeno též pomocí stejně vytvořených tabulek a grafů jako v případě testování odstranění distorze. Protože rozmístění vlícovacích bodů je měněno především v ose Y, byl vytvořen spojnicový graf s vynesenými průměrnými polohovými odchylkami (pro každou horizontální linii TP) v závislosti na výšce (ose Y). Grafy jsou uvedeny v příloze 8. Přesnost testování Přesnost testování je ovlivněna mnoha vlivy. Hodnota velikosti pixelu byla ve všech případech tvorby fotoplánu určena na 2,5 mm. Přesnost testování je dále ovlivněna přesností zaměření vlícovacích bodů, přesností určení vlícovacích bodů v SIMphotu, přesností odečtu bodů a zanedbáním hloubkové členitosti testovacího pole. V souhrnu odhaduji přesnost testování na přibližně 4 mm v souřadnici. V případě některých bodů lze vysledovat systematické vyšší hodnoty odchylek i v případě přesného odstranění distorze. To je způsobeno hloubkovou členitostí a tu je při tvorbě závěrů nutné zohlednit. 15

17 3 Použité přístroje V této kapitole jsou popsány přístroje použité při zaměření a snímkování testovacího pole. 3.1 Použité fotoaparáty V této diplomové práci byly použity dva fotoaparáty značky Canon EOS 5D Mark II a EOS 450D Canon EOS 5D Mark II Přístroj můžeme označit jako poloprofesionální digitální zrcadlovku. Je kompatibilní se všemi EF objektivy. Obsahuje čip CMOS o rozměrech 36µ24 milimetrů. Schopnost rozlišení čipu je 21,1 megapixelů. Fyzická velikost jednoho pixelu je 6,4 mikrometru. Maximální rozměr fotografií je 5616µ3744 pixelů. Pomocí funkce Autofokus lze provádět automatické zaostření. Nastavení citlivosti má rozsah ISO 100 až ISO Fotoaparát umožňuje ukládat snímky formátu RAW a JPEG. Volič režimů expozice nabídne klasické složení programové automatiky, priority clony, priority času a plně manuálního nastavení. Nastavení doby expozice je možné od 30 sekund až do 1/8000 s. Čerpáno z [3]. Použitý objektiv: Canon EF 16-35mm f/2.8 II USM II Obr. 3.1: Canon EOS 5D Mark II 16

18 Fotoaparát je vybaven poměrně kvalitním zoom objektivem. Po odstranění mírné radiální distorze lze očekávat poměrně vysokou geometrickou přesnost získaných snímků. Snímky pořízené tímto fotoaparátem a objektivem jsou pro rozlišení v této diplomové práci označovány jako A-5D_MarkII Canon EOS 450D Jedná se o amatérskou zrcadlovku se snadnou obsluhou a lehkým tělem. Přístroj je kompatibilní s více než 60 objektivy EF/EF-S. Snímač CMOS umožňuje rozlišení 12,2 megapixelu. Vysoká citlivost snímače umožňuje fotografovat při nízkém osvětlení. Rozměry čipu jsou 22,2µ14,8mm. Crop faktor fotoaparátu je 1,6. Přístroj umožňuje ukládat formáty fotografií JPEG a RAW. Největší rozměr fotografie je 4272µ2848 pixelů. Použitý objektiv: Canon EF-S18-55mm f/ II Obr. 3.1: Canon EOS 450D Fotoaparát je vybaven horším objektivem a menším čipem. Nelze předpokládat stejnou kvalitu snímků jako v případě předchozí kombinace fotoaparátu a objektivu. V této práci využíváme různé kvality snímacích zařízení k testování vlivu na výsledný fotoplán. Snímky pořízené tímto fotoaparátem a objektivem jsou pro rozlišení v této diplomové práci označovány jako B-450_D. 17
19 3.2 Totální stanice Trimble 3603 DR Totální stanice Trimble 3603 DR umožňuje měření délek pouze v jedné poloze. Označení DR znamená, že dálkoměr je schopen měřit na odrazný hranol i bezhranolově. Měření délky na hranol má přesnost 3mm + 2 ppm. Při měření s pasivním odrazem je přesnost měření 3mm s dosahem 150m. Přesnost úhlového měření je u tohoto přístroje 1 mgon. Měření se ukládá do vnitřní paměti. Obr. 3.3: Trimble 3603 DR 18
20 4 Testovací pole Pro účely testování různých způsobů odstranění distorze bylo nutné zvolit si vhodné testovací pole a zaměřit na něm s dostatečnou přesností dobře identifikovatelné body. Pro tyto účely byla použita stejně jako v případě mé bakalářské práce dlážděná stěna budovy fakulty architektury a fakulty informačních technologií sousedící s budovou fakulty stavební ČVUT. Pro testovací pole byla zvolená část jihozápadní stěny budovy o rozměrech přibližně 9 ä 15 metrů. Toto pole je orientováno na výšku. Obr. 4.1: Přehledka testovacího pole 19
 o pěti bodech. Umístění bodu TP se liší mezi lichými a sudými řadami: Obr. 4.")
21 Dobře signalizovanými body na této stěně jsou rohy dlaždic. Na stěně bylo zvoleno 35 bodů (rohů dlaždic) tvořících síť bodů o straně přibližně 2,5 metru. Tyto body tvoří sedm horizontálních linií (v rozestupech 31 dlaždic) o pěti bodech. Umístění bodu TP se liší mezi lichými a sudými řadami: Obr. 4.2: Umístění bodu v liché řadě Obr. 4.3: Umístění bodu v sudé řadě Nevýhodou testovacího pole je vertikální orientace testovacího pole, která neumožňuje tvorbu radiálního snímku. Testovací pole také není dokonale rovné a musí to být při vyvozování závěrů zohledněno. Další nevýhodou je nízká světelnost v tomto místě. V bakalářské práci byla pro některé případy testování přesnost geodetického zaměření nedostatečná. Proto bylo přistoupeno k novému zaměření, které by mělo zajistit homogenitu i zvýšení přesnosti bodů testovacího pole. Toho by mělo být docíleno především pomocí měřické základny umístěné v místnosti protější budovy přibližně v úrovni horních linií bodů testovacího pole. 20
22 4.1 Zaměření testovacího pole Body testovacího pole byly zaměřeny 24. října 2013 totální stanicí Trimble 3600 DR s možností bezhranolového měření délek. Tento přístroj neumožňuje měření délek v obou polohách dalekohledu, proto bylo měřeno pouze v jedné poloze. Zaměření bylo provedeno pomocí tří základen. Jedna základna byla umístěna v učebně v prvním patře budovy naproti testovacímu poli (4001, 4002). Druhá základna byla tvořena stanovisky 4003 a 4004 umístěnými před stěnou a jako třetí základna bylo použito zaměření provedené 23. listopadu 2012 pro účely bakalářské práce (stanoviska 4005 a 4006). Na body sítě bylo měřeno pomocí bezhranolového měření délek. Mezi stanovisky tvořícími základnu bylo použito měření na hranol. Všechny měřené hodnoty byly ukládány do přístroje zaznamenávány byly vodorovné směry, zenitové úhly a vodorovná vzdálenost. Body testovacího pole byly očíslovány 100 až 134. Soubory s měřenými daty jsou uvedeny v příloze [1] na DVD - Obr. 4.4: Situace zaměření 21
23 4.2 Výpočet souřadnic Výpočet bodů testovacího pole byl proveden pomocí vyrovnání v programu Gama-local msvc. Je to volně dostupný program pro výpočet rovinných a prostorových sítí. Program se spouští z příkazového řádku s parametry. Pro spuštění v českém jazyce je vhodné použít tento příkaz: gama-local msvc.exe --language cz --encoding cp vstup.gfk vystup.gfk Vysvětlení: gama-local msvc.exe : jméno spouštěného souboru --language cz : jazyk výstupu --encoding cp : kódování výstupu vstup.gkf : vstupní soubor (nahradit jménem vlastního souboru) vystup.gfk : výstupní soubor Pro výpočet byl vytvořen dávkový soubor obsahující měření ze všech základen. Dále jsou zadávány přibližné souřadnice stanovisek a odhadovaná apriorní přesnost měření. Podrobný manuál k programu v angličtině je dostupný na internetové stránce: Přibližné hodnoty souřadnic základen Souřadnice stanoviska 4002 byly zvoleny pro odlišení souřadnic na hodnoty: ČB Y[m] X[m] Z[m] Do spojnice stanovisek byla zvolena osa X. Z této základny byly určeny pomocí dávkového souboru body sítě. Z nich byly výpočtem volného stanoviska 22
24 v programu Groma 7 určeny přibližné souřadnice ostatních stanovisek tvořících základny a Body základen jsou vztaženy k centrům přístroje (průsečík točné osy dalekohledu s vertikální osou přístroje). Zenitové úhly byly proto přepočítány na spojnice postavení přístroje. Pomocí dávkového souboru, který zahrnuje veškerá měření, byly určeny zpřesněné přibližné souřadnice použité ve výsledném dávkovém souboru. Ze souboru byla postupně vyřazena odlehlá měření. Apriorní hodnoty přesnosti měření byly iterativně měněny, aby ve výsledném dávkovém souboru přibližně odpovídaly aposteriorním hodnotám. Tímto postupem bylo zjištěno, že přesnost měření je přibližně 35 grádových vteřin pro vodorovné směry a zenitové úhly (tj. pro 25 metrovou záměru: 1,4mm). Pro délkové měření byla zjištěna přibližná přesnost měření 7 milimetrů. Nízkou přesnost měření, vzhledem k přesnosti přístroje udávané výrobcem, lze vysvětlit blízkostí cílových bodů a nepřesné identifikaci těchto bodů. Dalším nepříznivým faktorem ovlivňujícím především délkové měření je strmost některých záměr. Výsledný dávkový soubor je uveden v příloze, viz dále. Souřadnice získané vyrovnáním v programu Gama byly převedeny do Gromy. Zde byly souřadnice sklopeny do roviny. Protokol o sklopení do roviny je uveden v příloze č. 7. Poté byly souřadnice transformovány pomocí shodnostní transformace do systému s počátkem v bodě 100. Osa +Y směřuje vzhůru. V příloze [II] na DVD jsou uvedeny seznamy souřadnic a protokoly o výpočtu souřadnic v programech Gama a Groma. 4.3 Zhodnocení přesnosti souřadnic Úkolem této diplomové práce bylo i zpřesnění souřadnic bodů testovacího pole. Toho bylo docíleno zaměřením bodů z dalších dvou základen, z čehož jedna byla umístěna v protilehlé budově kvůli snížení strmosti záměr. Pro výpočet souřadnic nebylo tentokrát použito protínání ale vyrovnání v programu Gama-local. Charakteristiky přesnosti získáme ve výstupním souboru z vyrovnání. Zajímají nás především směrodatné odchylky souřadnic X a Z (m x a m z ). Rozměr Y zanikne 23
25 vyrovnáním do roviny, přesto je s ním nutné dále také počítat. Maximální odchylky od roviny dosahují při sklopení 6 mm, více viz kapitola 6. Z následující tabulky je zřejmé, že přesnost bodů je přibližně 1 milimetr v jedné souřadnici. CB m x m y m z CB m x m y m z CB m x m y m z 100 0,6 1,1 0, ,6 0,9 0, ,9 1,5 1, ,7 1,0 0, ,6 1,0 0, ,9 1,6 1, ,7 1,0 0, ,5 0,9 0, ,5 1,0 0, ,7 0,9 0, ,6 0,9 0, ,5 0,9 0, ,8 1,2 0, ,6 0,9 0, ,5 0,9 0, ,6 1,0 0, ,6 0,9 0, ,6 0,9 0, ,6 1,0 0, ,6 1,0 0, ,6 0,9 0, ,6 0,9 0, ,6 1,0 0, ,6 0,9 0, ,6 0,9 0, ,6 0,9 0, ,6 0,8 0, ,7 0,9 0, ,6 1,0 0, ,4 1,5 0, ,6 1,0 0, ,6 1,0 0, ,3 1,2 0, ,6 0,9 0, ,9 1,7 1, ,6 1,2 0, ,6 0,9 0, ,9 1,6 1, ,6 1,1 0, ,6 0,9 0, ,9 1,5 1,3 Tab. 4.1: Výsledné charakteristiky přesností vycházející z vyrovnání v SW Gama Porovnání seznamů souřadnic Zaměření bylo provedeno ve dvou etapách: 1. etapa zaměření v rámci BP (základna ) 2. etapa zaměření v rámci DP (základny , ) Byly získány nové souřadnice bodů testovacího pole z výpočtu zahrnujícího obě etapy. Ty byly následně (pomocí funkce v programu Groma) porovnány se souřadnicemi zaměřenými v 1. etapě (v rámci bakalářské práce [1]). Výsledný protokol je uveden v příloze č. 4. Polohová odchylka mezi body v seznamech dosahuje až 7 mm. Odchylky získané tímto porovnáním často odpovídají odchylkám zobrazeným na nejpřesnějších grafech v bakalářské práci ([1] přílohy F a G). To naznačuje zvýšení přesnosti získaných souřadnic i vysokou přesnost plánů vytvořených v BP. Především je znatelná oprava bodu 120, který byl v BP nepřesně určen. 24
26 Pro zajímavost bylo provedeno porovnání i mezi 1. a 2. etapou. Protokol o porovnání seznamů souřadnic je uveden v příloze [III] na DVD. Odmyslíme-li si posun těžiště, získáme podobné hodnoty jako v předchozím případě. Přesnost souřadnic byla zvýšena pomocí měření z více základen a umístěním jedné ze základen do protější budovy. Tím byla snížena strmost záměr na body v horní části TP. 25
27 5 Snímkování + postprocesing Pro testování bylo nutné pořídit vhodné snímky. Testovány byly dva objektivy uvedené ve třetí kapitole. Pro lepší kvalitu byly snímky ukládány ve formátu RAW a následně upraveny v programu poskytovaným výrobcem (Canon) zároveň s fotoaparátem: Digital Photo Professional. 5.1 Snímkování Snímkování bylo provedeno z ruky pomocí obou fotoaparátů uvedených v třetí kapitole. Každým fotoaparátem byla pořízena sada snímků s různými nastaveními expozice i dalšími možnými nastaveními, viz dále. V obou případech byla nastavena možnost nejkratší možné ohniskové vzdálenosti. Snímky byly ukládány ve formátu RAW a JPEG. Voleno bylo maximální možné rozlišení snímků. A_5D_MarkII Snímky pořízené přístrojem Canon EOS 5D Mark II a dále upravované jsou v této práci označeny jako A_5D_MarkII. Použitý objektiv na daném fotoaparátu je EF 16-35mm f/2.8l II USM. Při snímání byl nastaven režim Av Automatická expozice s předvolbou clony. Nastavení rychlosti expoziční doby bylo provedeno pomocí funkce Automatický braketing expozice(aeb) s krokem ±2/3 EV. Bylo provedeno snímání s různým nastavením dalších parametrů. Z těchto snímků byl poté na počítači vybrán nejvhodnější snímek s těmito parametry: Objektiv EF 16-35mm f/2.8l II USM Ohnisková vzdálenost 16 mm čas snímání 1/40 s clonové číslo 9.0 citlivost ISO 400 velikost 5616 ä 3744 Tab. 5.1: Nastavení fotoaparátu 5D Mark II při snímkování 26
28 Při snímání byla pomocí přístroje Disto D3 změřena vzdálenost od testovacího pole a výškový úhel. vzdálenost úhel nejbližší vzdálenost 8,7 m 0 ke středu TP 11,5 m 41,8 horní část TP 17,3 m 60 Tab. 5.2: Konfigurace snímku a pole B_450D Snímky pořízené přístrojem Canon EOS 450D a dále upravované jsou v této práci označeny jako B_450D. Na přístroji byl upevněn objektiv EF-S 18-55mm f/ Při snímání byl opět nastaven režim Av a nastavení rychlosti expozice bylo provedeno pomocí funkce AEB s krokem ±2/3 EV. Bylo provedeno snímání s různým nastavením dalších parametrů. Z těchto snímků byl poté na počítači vybrán nejvhodnější snímek s těmito parametry: Objektiv 18-55mm f/ Ohnisková vzdálenost 18 mm čas snímání 1/50 s clonové číslo 10.0 citlivost ISO 400 velikost 4272 ä 2848 Tab. 5.3: Nastavení fotoaparátu 450D při snímkování Opět byly při fotografování měřeny vzdálenosti od mapovaného objektu a výškové úhly. vzdálenost úhel nejbližší vzdálenost 13,5 m 0 ke středu TP 15,5 m 30,2 horní část TP 20,2 m 48 Tab. 5.4: Konfigurace snímku a pole Použité kombinace fotoaparát + objektiv nejsou zcela porovnatelné. Profesionální fotoaparáty stejně jako přístroj Canon EOS 5D Mark II využívají historicky danou velikost snímače 36 x 24 mm. Tato velikost snímače se stala normou, 27
29 která určuje pro danou ohniskovou vzdálenost velikost zorného úhlu. V takovémto případě se udává hodnota crop faktoru 1. Velikost snímače fotoaparátu Canon EOS 450D je 22,2 x 14,8 mm. Hodnota crop faktoru je 1,6. Velikost úhlu záběru odpovídá objektivu s ohniskovou vzdáleností 18 ä 1,6 29 mm ( Čerpáno z [18]. 5.2 Postprocesing f crop). Při fotografování byly snímky ukládány ve formátu RAW. Jedná se o surová, minimálně zpracovaná data pořízená snímačem. Každý výrobce využívá trochu jiný formát těchto dat. Canon označuje své RAW soubory koncovkou.cr2. Takovýto formát umožňuje mnoho bezztrátových úprav (oproti JPEG a TIFF). Snímky formátu RAW byly upravovány ve firemním softwaru značky Canon Digital Photo Professional. V panelu nástrojů [Tool Palette] byly nastaveny hodnoty následujících parametrů: 1. Jas [Hightness Adjustment] pomocí posuvníku 2. Styl [Picture Style] volba [Portrét/Portrait] 3. Konrast [Contrast] pomocí posuvníku 4. Ostrost [Sharpness] pomocí posuvníku 5. Automatická úprava jasu a barev [Tone Curve Assist] [Standard] V této práci je dbáno více na geometrickou přesnost snímku než na věrohodnost barev. Proto byly nastaveny hodnoty kontrastu a ostrosti na vysoké hodnoty. Pomocí automatické úpravy jasu byl zesvětlen levý dolní roh testovacího pole. V DPP bylo provedeno uložení těchto nastavení. Pro další zpracování byly snímky exportovány do formátu JPEG. Snímky před editací a po editaci jsou uvedeny v DVD příloze [IV]. Čerpáno z [14]. 28

30 Obr. 5.1: Porovnání původního snímku s upraveným v DPP 29
31 6 Vliv hloubkové členitosti Při snímkování bylo provedeno zaměření některých vzdáleností a výškových úhlů charakterizujících konfiguraci při snímání. Při znalosti odchylek od roviny testovacího pole můžeme pro jednotlivé body TP určit souřadnicovou odchylku způsobenou hloubkovým členěním. Vyjdeme ze vzorců uvedených v [2]: kde y je hloubková členitost, f je ohnisková vzdálenost, m f je měřítkové číslo, f. m f. r y=, r = r. m f, r r je snímková radiální vzdálenost a r je způsobená radiální změna na fotoplánu. Po úpravě: r r = h. = h.tan f ( α) Obr. 6.1: Vliv hloubkové členitosti objektu Obrázek i vzorce vychází z ideálního stavu, kdy jsou roviny snímku a fotoplánu rovnoběžné. To neodpovídá skutečné situaci, a tak došlo k zjednodušení, kdy 30
32 předpokládám, že optická osa při snímání prochází bodem 102 (úroveň 1 - střední bod) a je kolmá na objekt (i fotoplán). Vycházím-li z hodnot odchylek od roviny získaných z protokolu o sklopení souřadnic do roviny (příloha č. 7), tak maximální opravy dosahují 6 mm. Nyní mohu na základě vzdáleností od testovacího pole měřených při snímání určit maximální možné odchylky v souřadnici ( r x a r y ) pro horizontální linie TP, způsobené hloubkovou členitostí. Horizontální linie TP Hloubková členitost Přímá vzdálenost k TP Výškový úhel ,7mm 0 mm 4. 6 mm 8,7 m 41,8 1,7mm 5,4 mm ,7mm 10 mm Tab. 6.1: Max. vliv hloubkové členitosti na plány vytvořené pomocí A_5D_MarkII r x r y Horizontální linie TP Hloubková členitost Přímá vzdálenost k TP Výškový úhel ,1 mm 0 mm 4. 6 mm 13,5 m 30,2 1,1 mm 3,5 mm ,1 mm 6,7 mm Tab. 6.2: Maximální vliv hloubkové členitosti na plány vytvořené pomocí A_450D r x r y Z tabulek je znatelný velký vliv snímací vzdálenosti, která závisí i na použité ohniskové vzdálenosti. Zde uvedené hodnoty jsou maximální možné. V průběhu testování nebyl vliv hloubkové členitosti odstraněn. Při vyvozování závěrů je pak nutné toto snížení přesnosti testování zohlednit především u bodů v horních liniích TP. Vliv hloubkového členění je zde hodnocen spíše pro orientaci a zjištění, jak tato skutečnost ovlivňuje přesnost testování. U ručního měření přístrojem Disto D3 lze očekávat omezenou přesnost určení konfigurace fotoaparátu vzhledem k testovacímu poli a jsou zanedbány i další okolnosti (přesnost určení hloubkové členitosti, výsledná skutečná rovina fotoplánu). 31
33 7 Způsoby odstranění distorze Distorze má vysoký vliv na přesnost fotoplánu. Tato kapitola se zabývá problematikou jejího odstranění. Byly zde testovány různé metody a programy ke korekci distorze používané. 7.1 Teorie distorze Distorze (zkreslení) objektivu je vada, která působí na geometrické zobrazení. Tato vada je způsobena souhrnem geometrických nepřesností při výrobě objektivu. V současnosti využívané objektivy jsou skládány z více optických prvků. Přesné urovnání těchto prvků do jedné optické osy není technicky možné. Jak bylo dokázáno v mé bakalářské práci, má distorze objektivu na přesnost výsledného fotoplánu značný vliv. Distorzi rozeznáváme radiální a tangenciální Radiální distorze hodnotu Radiální distorze způsobuje posun bodu o radiální vzdálenosti r na snímku o r. Její průběh nebývá přesně rotačně symetrický, přesto symetričnost při odstraňování předpokládáme. Radiální distorze má tři typy: Soudkové zkreslení V případě soudkového zkreslení se obraz zvětšuje se vzdáleností od optické osy. 32
34 Poduškové zkreslení U poduškového zkreslení se obraz zvětšuje se vzdáleností od optické osy. Kombinace Třetí možností je kombinace předchozích dvou zkreslení. Ve většině případů je potom ve středu snímku soudkové kreslení, které na okrajích přechází v poduškové. Druhou možností je, že ve středu snímku vykazuje snímek poduškové zkreslení a na okrajích soudkovité. Čerpáno z [19] a [25] Tangenciální distorze Tangenciální zkreslení objektivu je způsobeno také nepřesnou centrací jednotlivých optických prvků objektivu. Způsobuje nepravidelné těžko definovatelné lokální posuny působící v kolmém směru na radiální distorzi. Kvůli složitému matematickému vyjádření se tangenciální distorze často neuvažuje. U kvalitních objektivů bývá její vliv zanedbatelný. 7.2 Matematické modely pro odstranění distorze K potlačení geometrického zkreslení se využívá výpočet oprav z distorze. Kalibrované objektivy musí splňovat alespoň přibližně požadavek symetrické radiální distorze (= minimální tangenciální distorze). K výpočtu oprav z radiální distorze je používán analytický způsob. Je nasnímáno pole s dostatečným množstvím diskrétních bodů o známých souřadnicích. Poté jsou změřeny snímkové souřadnice těchto diskrétních bodů (vlícovací body). Zjištěné rozdíly mezi měřenými snímkovými souřadnicemi a jejich správnými hodnotami přisoudíme 33
35 vlivu distorze. Získáme množinu odchylek, kterými proložíme funkci co nejlépe popisující danou množinu. K tomuto účelu bývají nejčastěji využívány polynomické funkce: x = x+ x, y = y+ y, kde ( x, y ) jsou opravené snímkové souřadnice tj. souřadnice pořízené ideálním objektivem a ( x, y) jsou původní snímkové souřadnice ovlivněné distorzí. Používané matematické distorzní modely V praxi je využíváno více distorzních modelů. Zde uvádím ty, s kterými jsem se setkal v průběhu diplomové práce. Čerpáno z [20], [21], [22] a [9] Distorzní model podle Duane C. Browna Nejčastěji využívaným modelem pro odstranění distorze je Brownův distorzní model (čerpáno z [20], [21]). Tento model popisuje korekci distorze pomocí rovnic: kde ( K1 r + K 2r + K 3r +...) + [ P1( r + 2rx ) + 2P2 rxry] [ 1+ P ] r ( K r + K r + K r +...) + [ P ( r + 2r ) + 2P r r ] [ 1+ P 2...], x = x+ r r x y = y+ r y 2 2 [( x x ) + ( y ) ] 1/ 2 r =, r r = x, x x c = y. y y c c y c y 1 x y 3 +, Hodnota r je radiální vzdálenost od hlavního snímkového bodu, r x a ry jsou složky radiální distorze. 34
36 Při kalibraci komory jsou neznámými hodnotami v těchto rovnicích: koeficienty radiální distorze... K 1, K 2, K 3,... koeficienty tangenciální distorze... P 1, P 2, P 3,... souřadnice hlavního snímkového bodu... x c, y c Často se používána úprava vztahu pro rozčlenění na opravu z radiální a tangenciální distorze: x = x+ r x + t x y = y+ r y + t y Potom oprava z radiální distorze, : rx ry r x = rx( K1 r + K2r + K3r +...), ry = ry( K1 r + K 2r + K 3r +...) Opravy z tangenciální distorze t t = tx, t y : [ P1 ( r + 2rx ) + 2P2 rx ry] [ 1+ P3 r +...] [ P ( r + 2r ) + 2P r r ] [ 1+ P r...] x, y = 2 y 1 x y 3 + Rovnice Brownova modelu jsou v praxi zjednodušovány omezením výpočetního rozvoje sníží se počet distorzních koeficientů. Ve fotogrammetrických softwarech, kde je nutné provádět kalibraci fotoaparátů s vysokou přesností jsou užívány tři koeficienty radiální distorze K 1, K 2, K 3 a dva koeficienty tangenciální distorze P 1, P 2. Rovnice pro výpočet opravených snímkových souřadnic potom mají tvar: ( K1r + K 2r + K3r ) + [ P1( r + 2rx ) 2P rx ry] ( K r + K r + K r ) + [ P ( r + 2r ) P r r ] x = x+ rx + 2 y = y+ ry y x y 35
37 V tomto vztahu pro opravu zkreslení objektivu jsou neznámými hodnotami tři koeficienty radiální distorze, dva koeficienty tangenciální distorze a souřadnice hlavního snímkového bodu x c, y c. Počet neznámých hodnot je 8. Mezi výstupy z kalibrace v kalibračních programech bývá uváděna vyrovnaná hodnota ohniskové vzdálenosti f. Tento kalibrační model je používán v fotogrammetrické aplikaci PhotoModeler. Setkal jsem se s ním i u SW OpenCV (toolbox pro kalibraci kamery v Matlabu). Oprava distorze v programu SIMphoto je založena na využití výsledků z PhotoModeleru a využívá k výpočtu oprav snímků též tyto vztahy PanoTools distorzní model Helmut Dersch vytvořil sadu programů a knihoven pro úpravy fotografií (čerpáno z [22], [27]). V těchto programech je základním vztahem pro opravu distorze PanoTools distorzní model: R U = a R + b R + c R + (1 a b c) R 4 D 3 D 2 D D, kde R U je vzdálenost od středu kalibrovaného snímku, R D je vzdálenost od středu snímku s distorzí a a,b,c jsou koeficienty distorze. Tento distorzní model využívá mnoho programů určených pro spojování snímků do panoramat (PTStitcher). Dále je použit často v programech využívajících pro odstranění distorze databázi distorzních modelů. Tyto programy lze často poznat podle zkratky PT v jejich názvu (PTLens, PTViewer, PTEditor,...[28]) Pro objektivy s nízkým lehce popsatelným zkreslením je v některých případech provedeno zjednodušení: a = 0, b = h 1 a c = 0. Potom získáme vzorec: R U ( h ) RD 3 = h1 RD
38 7.2.3 Jednoduché distorzní modely používající posuvníky Téměř všechny editory obrazové grafiky umožňují korekci distorze pomocí jezdců. Tato varianta je pouze velmi přibližná a předpokládá změnu jednoho radiálního distorzního koeficientu pomocí jezdce. Ve výjimečných případech jsou používány jezdce dva. Zde uvádím distorzní modely, se kterými jsem se setkal. Distorzní model využívající dvou posuvníků Provedeme-li zjednodušení Brownova modelu: uvažujeme středově souměrný vliv distorze: rx = ry = r neuvažujeme vliv tangenciální distorze počet koeficientů radiální distorze omezíme na dva K1a K 2, získáme rovnice pátého řádu: 2 4 ( K1r K 2 ) 2 4 ( K r K ) x = x+ r + r y = y+ r + r 1 2 Protože je nyní oprava zkreslení ve všech směrech stejná, vystačíme se vztahem pro opravenou délku průvodiče: 2 4 ( 1+ K r K ) r = r + r 1 2 Tento vzorec využívají např. programy UFRAW, Imatest, CamChecker. Pro nastavení koeficientů K1 a K 2 jsou používány dva posuvníky. Distorzní modely s jedním posuvníkem Dalším zjednodušením Brownova modelu, kdy omezíme počet koeficientů radiální distorze pouze na jeden ( K 1 ), získáme pro opravu snímkových souřadnic polynom třetího řádu: 2 ( 1 K ) r = r + r 1 37
39 Tato rovnice již nemůže s dostatečnou přesností popisovat průběh distorze a pro úpravu snímku pro fotoplán je nedostačující. Tento model využívá většina programů využívajících ke korekci distorze jeden posuvník. Zde uvádím již pouze pro zajímavost další distorzní model s jedním posuvníkem: SW Imatest používá též model: r ( p. r) tan p 1 r=... pro soudkové zkreslení tan 10. p 1 ( 10. p. r) 1 1 =...pro poduškové zkreslení 1 Zde je opět r opravená délka průvodiče. Posuvníkem nastavujeme hodnotu koeficientu p 1. Ten vychází z Taylorova polynomu pro tan(x) a tan -1 (x) a předchozího distorzního modelu: tan(x) = x + x 3 /3 +2.x 5 /15 + ; tan -1 (x) = x x 3 /3 + x 5 /5 ( x 2 < 1) ; r u = x p 1 2 x 3 /3 + (soudkové zkreslení); r u = x 100 p 1 2 x 3 /3 + (poduškové zkreslení), Mezi koeficienty platí vztah: k 1 sign( p 1 )*100 p 1 2 /3 pro malé hodnoty k 1 a p 1. Se zvyšujícími se hodnotami dochází k divergenci. Výsledná přesnost by měla přibližně odpovídat předchozímu distorznímu modelu, ze kterého vychází. 38
40 7.3 Testování snímků bez korekce distorze Nejprve byly testovány původní snímky bez jakékoli korekce distorze. Snímky upravené v DPP byly načteny do SIMphota a následně z nich byly na základě šesti vlícovacích bodů vytvořeny fotoplány. A_5D_MarkII Z vytvořeného grafu souřadnicových odchylek je patrný vliv radiální distorze s maximálními odchylkami 6,6 cm. Vektory směřují směrem od středu snímku. Objektiv má tedy soudkovité zkreslení. Přesnost takto vytvořeného fotoplánu je okolo tří centimetrů v jedné souřadnici. Graf odchylek (příloha 2 graf A) je středově souměrný kolem středu snímku, což značí minimální tangenciální distorzi. Osa Charakteristika bez kal. Y Max. odchylka 6,6 cm směrodatná odchylka 3,8 cm X Max. odchylka 4,8 cm směrodatná odchylka 2,7 cm Tab.7.1: Charakteristiky přesnosti plán bez odstranění distorze B_450D Přesnost plánu vytvořeného pomocí neupravených snímků nasnímaných amatérským fotoaparátem je mnohem nižší. Plán vykazuje vysokou radiální distorzi opět soudkovitého charakteru. Dále je patrné, že vektory směřující vpravo jsou delší. To značí poměrně vysokou tangenciální distorzi. Snímek je prohnut doprava (prohnutí ve tvaru luku). Maximální odchylky takto vytvořeného plánu jsou až 17 cm. Přesnost plánu je přibližně 7 centimetrů v jedné souřadnici. Graf souř. odchylek je uveden v příloze 2 graf B. 39
41 Osa Charakteristika bez kal. Y Max. odchylka 12,1 cm směrodatná odchylka 6,5 cm X Max. odchylka 16,9 cm směrodatná odchylka 7,9 cm Tab.7.2: Charakteristiky přesnosti plán bez odstranění distorze Zhodnocení: Byly vytvořeny fotoplány ze snímků vytvořených neměřickými fotoaparáty za využití maximálně širokoúhlého nastavení zoomu. Bez odstranění distorze mají takto vytvořené plány neměřickými komorami přesnost v rámci centimetrů až decimetrů. 7.4 Korektní výpočet kalibrace Výpočet kalibrace je možný prakticky v každém fotogrammetrickém softwaru. Kalibrace je provedena pro jednu ohniskovou vzdálenost na základě snímků kalibračního pole. Výpočet v počítači je proveden pomocí jednoho z kalibračních modelů na základě vztahu mezi známými souřadnicemi bodů na kalibračním poli a snímkovými souřadnicemi těchto bodů. V této práci je uvedena kalibrace pomocí SW PhotoModeler a Agisoft. V mé bakalářské práci bylo zjištěno, že oprava snímků na základě výsledků jedné kalibrace nemusí mít u širokoúhlých objektivů dostatečnou přesnost. Proto byla vyzkoušena možnost provést kalibraci v PM vícekrát a pro opravu zkreslení snímků využít průměr. Dále byla zkoušena možnost provedení jedné kalibrace, opravení snímků kalibračního pole a následná druhá kalibrace k případného zbytkového zkreslení. Snímky určené pro tvorbu fotoplánu byly opraveny dvakrát podle koeficientů distorze získaných v první a druhé kalibraci. 40
 Koeficienty distorze - K 1,K 2, K 3, P 1, P 2 Zpřesněná velikost snímku [mm] - F w, F h")
42 7.4.1 PhotoModeler Scanner Program SIMphoto umožňuje korekci distorze na základě výsledků kalibrace získaných v PhotoModeleru. PM využívá Brownův distorzní model. Výsledkem kalibrace jsou hodnoty: Konstanta komory [mm] - f Poloha hlavního snímkového bodu [mm] - (x c,y c ) Koeficienty distorze - K 1,K 2, K 3, P 1, P 2 Zpřesněná velikost snímku [mm] - F w, F h Obr. 7.1: Pracovní prostředí SW PhotoModeler Scaner Kalibrace fotoaparátu je prováděna pomocí rovinného kalibračního pole malého rozsahu (KP). 41
43 Postup kalibrace 1) Snímání kalibračního pole: Kalibrace byla provedena pomocí pěti snímků kalibračního pole. Byly pořízeny 4 snímky orientované přes diagonálu KP pod úhlem asi 45 a jeden snímek frontální. Nastavení fotoaparátu by mělo odpovídat situaci v terénu (zaostření na nekonečno). Není nutné, aby na snímcích figurovaly všechny body KP. 2) Načtení snímků: Pořízené snímky jsou načteny do aplikace PM. 3) Nastavení parametrů fotoaparátu: Ve vytvořeném projektu jsou nastaveny předběžné hodnoty charakterizující nastavení fotoaparátu při snímkování (ohnisková vzdálenost, velikost snímače, souřadnice hlavního snímkového bodu). 4) Provedeme na snímcích automatické označení bodů KP. 5) Referencování: Pomocí funkce [referencování/referencing mode] bylo ztotožněno 8 bodů na všech snímcích. Výpočet orientace snímků byl proveden pomocí volby: [Process]-[Options]-[Orientation]-[All Photos]. Potom bylo provedeno automatické referencování ostatních bodů pomocí volby: [Referencing]-[Automatic referencing]. 6) Kontrola a oprava referencování: Při automatickém referencování bodů dochází k chybám. Nesprávně určené body je nutné vymazat a neoznačené body ručně dooznačit. Pak zopakujeme proces orientace snímků. 7) Provedeme kontrolu přesnosti bodů pomocí tabulky: [Table Windows]-[Point Table-Quality]. Body výrazně snižující přesnost vyřadíme z výpočtu. 8) Provedeme výpočet kalibrace volbami [Process]-[Options]-[Full Field Calibration]. Výsledky jsou uvedeny v kalibračním protokolu. Zde jsou uvedeny kalibrační parametry a jejich přesnost. V bakalářské práci vyvstala otázka o přesnosti výsledků kalibrace v PM. Proto jsem se touto problematikou dále zabýval. Na internetových stránkách aplikace je uvedeno, že u přesné kalibrace by měly být všechny odchylky bodů (Point Marking Residuals) nižší než 1 pixel. Čerpáno z [7]. 42
44 Jedna kalibrace V této části projektu byly zkoušeny různé možnosti. Byly zkoušeny rozdíly mezi kalibracemi provedenými pomocí různých sad snímků za stejného nastavení fotoaparátu. A_5D_MarkII S kvalitnějším fotoaparátem bylo provedeno 5 kalibrací pomocí různých sad snímků (a,b,c,d,e). Výsledné hodnoty jsou uvedeny v příloze č. 5 a tabulka i s uvedenými přesnostmi je uvedena v příloze [5] na DVD. Nevím, zda je to mou nezkušeností či z jiného důvodu, ale v žádném z těchto případů nebylo docíleno, aby při kalibraci byly všechny odchylky nižší než 1 pixel. Podobné přesnosti jsem však dosáhl i v mé BP při použití téměř plně automatizovaného postupu. Získané hodnoty kalibračních parametrů se tedy pro různé sady snímků mírně liší. Při testování byly vytvořeny tři fotoplány. Dva plány byly vytvořeny v SIMphotu po opravě snímku pomocí kalibračních parametrů z kalibrací a a c. Třetí fotoplán byl vytvořen pomocí průměrných kalibračních parametrů ze všech kalibrací. Fotoplány získané pomocí kalibrace v PM mají vysokou přesnost. Sořadnicové odchylky se pro různé kalibrace mírně liší. V tabulce odchylek je možné vysledovat i systematický vliv, který je, předpokládám, způsoben hloubkovým členěním mapovaného objektu. Pro fotoplán opravený průměrnými hodnotami byl vytvořen graf souřadnicových odchylek uvedený v příloze č. 2 grafu C. Z grafu je patrná vysoká přesnost plánu. Ve středu snímku lze možná vysledovat z vektorů odchylek směřujících vlevo mírný zbytek tangenciální distorze. Přesto mohu konstatovat přesné odstranění radiální distorze a možná tangenciální distorze je v rámci dvou pixelů (5 mm) kal. Osa Charakteristika kal. PM1a kal. PM1c PMprumer Max. odchylka 1,3 cm 1,8 cm 1,3 cm Y směrodatná odchylka 0,6 cm 0,5 cm 0,4 cm Max. odchylka 1,5 cm 0,9 cm 1,3 cm X směrodatná odchylka 0,6 cm 0,4 cm 0,5 cm Tab.7.3: Charakteristiky přesnosti 1 kalibrace PhotoModeler 43
45 B_450D Pro tento fotoaparát byly provedeny dvě kalibrace a a b. V obou případech bylo docíleno, že všechny odchylky při kalibraci jsou nižší než 1 pixel. Výsledné hodnoty jsou uvedeny v příloze č. 5. Hodnoty parametrů distorze se mezi sebou liší mírně tj. odchylky odpovídají uváděné přesnosti v kalibračních reportech. Vyšší rozdíl je pouze u parametru tangenciální distorze P 1. Pro oba případy byl vytvořen fotoplán. Přesnost těchto plánů je prakticky shodná. Pro kalibraci a byl vytvořen graf uvedený v příloze č. 2 (graf D). Z grafu je patrný velký zbytek tangenciální distorze. Ve střední části plánu dosahují odchylky hodnot 2,8 cm. Osa Charakteristika kal. PM1a kal. PM1b Max. odchylka 1,0 cm 0,9 cm Y směrodatná odchylka 0,4 cm 0,5 cm Max. odchylka 2,8 cm 2,8 cm X směrodatná odchylka 1,2 cm 1,3 cm Tab.7.4: Charakteristiky přesnosti 1 kalibrace PhotoModeler Zhodnocení: Přesnost kalibrace může být nižší, než je uváděno poskytovatelem aplikace (nedosahuje subpixelové přesnosti). V takovém případě doporučuji pro velmi přesné výsledky provést více kalibrací s různými sadami snímků a jako výsledek použít průměrné hodnoty parametrú distorze. Pomocí kalibrace v aplikaci PhotoModeler Scaner byla s vysokou přesností odstraněna radiální distorze. V obou případech můžeme sledovat nedostatečné odstranění tangenciální distorze. Pro kvalitní objektiv Nabízí se otázka hledání dalších možností zkvalitnění výsledků kalibrace např. provedení druhé kalibrace (na opravených kalibračních snímcích). 44
46 Dvojí kalibrace Pro nedokonalé odstranění distorze na základě jedné kalibrace provedené v aplikaci PM byla vyzkoušena možnost provést další kalibraci pomocí sad snímků z první kalibrace již opravených na základě parametrů distorze z první kalibrace. Tabulky s výslednými hodnotami kalibrace jsou uvedeny v příloze č. 6. Snímky určené pro tvorbu fotoplánu byly tedy opraveny dvakrát pomocí hodnot kalibračních parametrů z první i druhé kalibrace. A_5D_MarkII Pro všechny sady snímků byla provedena i druhá kalibrace. Fotoplány byly opět vytvořeny pouze pro sady a a c. Sice došlo k velmi mírnému zlepšení přesnosti fotoplánů, ale vlivem dalšího přepočtu obrazu došlo ke značnému zhoršení obrazové kvality. Geometrická přesnost přibližně odpovídá fotoplánu vytvořenému pomocí snímku opraveného na základě průměrných hodnot z více kalibrací. Z průměru hodnot ze všech druhých kalibrací vycházejí kromě koeficientu P 1 všechny ostatní koeficienty prakticky nulové. Další oprava snímku pro fotoplán by však byla minimální a při zhoršení kvality obrazové kvality snímku těžko zjistitelná. Proto bylo od této možnosti upuštěno. Osa Charakteristika kal. PM2a kal. PM2c Max. odchylka 0,9 cm 0,6 cm Y směrodatná odchylka 0,5 cm 0,3 cm Max. odchylka 1,3 cm 0,9 cm X směrodatná odchylka 0,6 cm 0,4 cm Tab.7.5: Charakteristiky přesnosti 2 kalibrace PhotoModeler B_450D Pro obě sady snímků byly po jejich opravě provedeny i druhé kalibrace. Méně kvalitní objektiv má vysokou tangenciální distorzi. Ta byla pomocí dvojí kalibrace zmírněna až na přesnost plánů vytvořených pomocí kvalitnějšího objektivu pomocí jedné kalibrace. Druhou kalibrací se zde ovšem také sníží obrazová kvalita. Graf 45
47 s odchylkami je uveden v příloze č. 2 - Graf E. Ve středu pole, kde byly po první kalibraci odchylky téměř 3 cm, jsou nyní odchylky prakticky nulové. Osa Charakteristika kal. PM_2a kal. PM_2b Max. odchylka 0,9 cm 0,6 cm Y směrodatná odchylka 0,5 cm 0,3 cm Max. odchylka 1,3 cm 0,9 cm X směrodatná odchylka 0,6 cm 0,4 cm Tab.7.6: Charakteristiky přesnosti 2 kalibrace PhotoModeler Zhodnocení: Druhá kalibrace umožní odstranění zbytkové distorze z první kalibrace. Radiální distorzi je schopen program PM odstranit jednou kalibrací. Tangenciální distorze je hůře matematicky popsatelná a program ji může lépe detekovat až při zvýšení jejího vlivu tj. po odstranění radiální distorze. V případě dvojí kalibrace dochází k trojímu přepočtu rastrového obrazu: 1. odstranění distorze 2. odstranění distorze tvorba plánu Každý přepočet obrazu snižuje obrazovou kvalitu. Proto bych možnost odstranění distorze, na základě dvojí kalibrace, raději nedoporučoval. 46

48 7.4.2 Agisoft Agisoft Lens je volně dostupný software, který umožňuje automatickou kalibraci fotoaparátu. Program využívá kalibrační pole zobrazené na LCD monitoru. Výsledkem kalibrace jsou následující parametry: f x, f y ohniskové vzdálenosti c x, c y souřadnice hlavního snímkového bodu K 1, K 2, K 3, P 1, P 2 koeficienty radiální a tangenciální distorze Hodnoty ohniskové vzdálenosti a souřadnic hlavního snímkového bodu jsou uváděny v pixelech. Program Agisoft využívá Brownův distorzní model. Formát výsledků je určen pro opravu distorze v programu Agisoft PhotoScan a liší se od výsledků získaných v PhotoModeleru. Agisoft totiž vychází z inverzních vztahů Brownova distorzního modelu. Obr. 7.2: Pracovní prostředí SW Agisoft Lens 47
49 Postup kalibrace 1) nasnímání kalibračního pole Po spuštění aplikace pomocí ikony šachovnice (Show chessboard) se přes celou obrazovku počítače zobrazí šachovnicové kalibrační pole. To nasnímáme fotoaparátem při nastavení požadované ohniskové vzdálenosti tak, aby na snímcích nebylo nic jiného než kalibrační pole. Minimálně jsou potřeba tři snímky. Každý snímek pořídíme z mírně jiné konfigurace. Kalibrační pole zavřeme kliknutím LTM nebo tlačítkem Escape. Obr. 7.3: Kalibrační pole 2) načtení snímků do programu Po nahrání snímků do počítače vybereme v nabídce [Tools] volbu [Add Photos] a přidáme kalibrační snímky do programu. Zkontrolujeme, zda mají všechny snímky stejnou konstantu komory a zda je na snímcích pouze kalibrační pole. Nevhodné snímky vymažeme. Program pracuje s formáty JPEG, TIFF, PNG, PPM a BMP. 3) kalibrace objektivu V nabídce [Tools] zvolíme možnost [Calibrate...] a vyčkáme než program provede výpočet. Výsledky najdeme po otevření okna [Report]. Zde jsou uvedeny hodnoty ohniskových vzdáleností, souřadnice hlavního snímkového bodu a koeficienty radiální a tangenciální distorze. Také jsou zde zobrazeny grafy s průběhem radiální a tangenciální distorze. Na snímcích jsou zobrazeny body (rohy čtverců) využité pro 48
50 výpočet. Pokud by body z některého rohu nebyly využity v žádném ze snímků, můžeme opatřit další snímky, přidat je a provést nový výpočet. Převod jednotek Kalibrace v programu Agisoft Lens byla provedena pouze pro fotoaparát Canon EOS 450D. Kalibrace byla provedena podle výše uvedeného postupu. Výsledné hodnoty kalibrace byly zjištěny z reportu. Zde jsou uvedeny tabulky zobrazující vliv distorze na snímkové souřadnice. Obr. 7.4: Grafy průběhu distorze v programu Agisoft Lens Výsledné hodnoty jsou ve formátu určeném pro opravu distorze v programu Agisoft PhotoScan. To je však placený fotogrammetrický program. Proto bylo nutné převést výsledné hodnoty do stejného formátu jako využívá aplikace PhotoModeler a až poté byly snímky opraveny v této práci využívaném programu SIMphoto. Konstanty komory, kde pro zjednodušení uvažujeme f = f f, a souřadnice x y = hlavního snímkového bodu c x, c y jsou uvedeny v pixelech. Velikost čipu je 22,2µ14,8 m a velikost snímku v pixelech je 4272 µ Využitím trojčlenky získáme vztahy: 22,2 f [ mm ] = f pix, ,2 c [ mm ] = c pix, , 2 kde zlomek 4272 popisuje fyzickou velikost jednoho pixelu. 49
51 Koeficienty distorze v PhotoModeleru vychází z inverzních vztahů vůči koeficientům používaným v Agisoftu. Zde jsou vztahy pro získání potřebných hodnot radiální distorze: K K K PM 1 PM 2 PM 3 Agi K1 =, 2 f Agi K 2 =, 4 f Agi K 3 =, 6 f kde indexy PM značí koeficienty používané v PhotoModeleru a index Agi značí koeficienty používané v Agisoftu. Čerpáno z [30]. Pro koeficienty tangenciální distorze je situace složitější. Přesný vztah mezi těmito koeficienty jsem nezjistil. Program Agisoft Lens umožňuje převod koeficientů distorze získaných v jiných kalibračních programech do svého systému. Opačný postup však neumožňuje. Využil jsem tedy postup z PM P do Agi P a na základě zkoušení byl zjištěn přibližný zpětný vztah pro f = 18mm: P PM 1 P PM 2 = = Agi P2 15 Agi P1 15 Tabulka s hodnotami získanými při zkoušení je uvedena v příloze [VI] na DVD. S její pomocí byla zjištěna lineární závislost vztahů s ohniskovou vzdáleností. Pro f = Agi P2 18 mm byla hodnota PM P 1 P Agi 1 ( PM P2 ) zjištěna na -15 ± 0,1 mm. V následující tabulce jsou uvedeny hodnoty získané automatickou kalibrací v SW Agisoft a následně vypočtené hodnoty pro provedení korekce distorze snímku v SW SIMphoto. 50
52 Agisoft PM f 3398,36 pix 17,66001 mm Xp 2161,27 pix 11,23131 mm Yp 1539,58 pix 8, mm K1-0, , K2 0, , K3-0, , P1-0, , P2-0, , Tab. 7.7: Tabulka výsledných hodnot Testování Varianta odstranění distorze v SW Agisoft Lens byla testována pouze pro fotoaparát Canon EOS 450D. Parametry potřebné k odstranění distorze v programu SIMphoto byly získány pomocí výše uvedeného postupu. Poté byla provedena oprava distorze a následně vytvořen fotoplán. Výsledky: B-450D Z transformační tabulky i z tabulky souřadnicových odchylek vyplývá vysoká přesnost výsledného fotoplánu. Z grafu zobrazujícího vynesené souřadnicové odchylky je stále patrné lukovité prohnutí snímku doprava způsobené tangenciální distorzí. Maximální odchylky již ale činí méně než 2,5 cm. Výsledná přesnost takto vytvořeného fotoplánu je tedy mírně lepší než v případě fotoplánu vytvořeného pomocí jedné kalibrace v PhotoModeleru. Graf souřadnicových odchylek je uveden v příloze 2 - graf F. V následující tabulce jsou charakteristiky přesnosti daného fotoplánu. Osa Charakteristika bez kal. kal. Agisoft Y Max. odchylka 12,1 cm 0,8 cm směrodatná odchylka 6,5 cm 0,4 cm X Max. odchylka 16,9 cm 2,4 cm směrodatná odchylka 7,9 cm 1,1 cm Tab.7.8: Charakteristiky přesnosti AgisoftLens 51
53 Zhodnocení: Práce v programu Agisoft Lens je pro jeho jednoduchost příjemná. Ovládání programu je intuitivní. Kalibrace v tomto programu je velmi rychlá a nevyžaduje žádné velké kalibrační pole. Ke kalibraci stačí pouze fotoaparát a monitor počítače se zobrazeným šachovnicovým polem. Nevýhodou je nutnost zaostření na blízkou vzdálenost, které může přesnost hodnot kalibračních parametrů negativně ovlivnit. Další nevýhodou je, že výsledné hodnoty kalibrace jsou určeny pouze pro placený program Agisoft PhotoScan. V této diplomové práci jsem provedl přepočet všech parametrů distorze na jednotky využívané v PhotoModeleru a SIMphotu. Přepočet koeficientů tangenciální distorze však nebyl zcela korektní a bylo by vhodné pro využívání tohoto postupu zajistit korektní postup výpočtu mezi distorzními parametry z Agisoftu do PM. Přesnost této automatické kalibrace je vysoká a v odstranění tangenciální distorze v tomto případě mírně předčila i kalibraci v PhotoModeleru (provedené jednou) Hugin Hugin je volně dostupná aplikace pro spojování snímků do panoramat. Tvorba panoramat vyžaduje geometricky přesné snímky je nutné odstranit distorzi. V programu je možné provést kalibraci na základě vyrovnávání nasnímaných rovných linií, které jsou objektivem zkresleny, opět do přímek. Hugin využívá PanoTools distorzní model tj. polynom čtvrtého řádu se třemi koeficienty distorze (a, b, c): R U = a R + b R + c R + (1 a b c) R 4 D 3 D 2 D D Program umožňuje více způsobů pro určení koeficientů distorze. Vždy se jedná o narovnání linií do přímky. Předpokladem k dobré kalibraci jsou snímky s rovnými liniemi (např. napnutý provázek). Linie lze určit pomocí automatické detekce či ručním označením bodů linie. Podrobné návody jsou dostupné na internetových stránkách 52
54 programu či na stránkách Lensfun (databáze distorzních modelů objektivů vytvořených v SW Hugin). Sám jsem kalibraci v tomto programu neprovedl, přesto testování její přesnosti bylo provedeno pomocí již vytvořených distorzních modelů v programu Hugin, které jsou součástí databáze Lensfun. O této databázi je více psáno v podkapitole Grafy souřadnicových odchylek fotoplánu pořízených pomocí oprav na základě databáze Lensfun (využívající kalibraci v programu Hugin) jsou uvedeny v příloze 2 - grafy G a H Zhodnocení přesnosti odstranění distorze pomocí kalibrace Jedná se o nejpřesnější způsob odstranění distorze. Kalibrace je provedena přímo pro daný objektiv a nespoléháme se na to, že distorze je shodná pro daný typ objektivu, jako je tomu v případě databází objektivů. Pro objektivy se zanedbatelnou tangenciální distorzí lze jednou kalibrací dosáhnout subpixelové přesnosti snímku. Každý objektiv je originál a především u těch méně kvalitních lze očekávat větší odlišnosti. Největší výhody má kalibrace konkrétního objektivu u objektivů s tangenciální distorzí. To je náhodná chyba konkrétního objektivu, s kterou si databáze objektivů ani jiné metody nemohou poradit. Pak už pouze záleží na tom, jak je kalibrační program schopen tuto distorzi detekovat a odstranit. Bylo zjištěno, že kalibrační programy mohou mít problémy s odstraněním tangenciální distorze. Někdy jsou ji schopny lépe detekovat a odstranit až po korekci radiální distorze. U objektivů vykazujících vysokou tangenciální distorzi je možné přistoupit k provedení dvou po sobě jdoucích kalibrací a úprav snímků. Tím dosáhneme vysoké přesnosti plánu. Musíme však počítat se snížením obrazové kvality. Programů umožňujících provedení kalibrace je celá řada způsobů provedení kalibrace ještě více. Využívány jsou různé typy rovinných i prostorových kalibračních polí. Třeba doplněk pro kalibraci v Matlabu umožňuje minimálně 6 způsobů provedení kalibrace. 53
55 7.5 Databáze distorzních modelů Někteří výrobci poskytují s fotoaparáty zároveň i programy pro zpracování snímků ( firemní software ). Tyto programy umožňují opravu snímků o distorzi pomocí databáze distorzních profilů objektivů. V databázi jsou distorzní parametry pro objektivy produkované příslušnou firmou. Oprava distorze pomocí databáze distorzních profilů objektivů je možná i v některých běžných grafických editorech. Tyto databáze obsahují velké množství distorzních profilů objektivů všech značek. Distorzní profily jsou vytvářeny na základě kalibrací provedených správci databáze i běžnými uživateli ve volně dostupných kalibračních softwarech Firemní software Protože testování je prováděno pomocí fotoaparátů a objektivů od výrobce Canon, zabýval jsem se tedy především jeho firemním programem Digital Photo Professional. Dalším výrobcem poskytujícím opravu distorze ve svém softwaru je firma Nikon. Jedná se o program Nikon Capture NX2. Firemní programy jsou placené. Při koupi přístroje však bývá program dáván jako součást příslušenství. Digital Photo Professional Software Digital Photo Professional je určen pro zpracování, prohlížení a úpravy snímků typu RAW. Dále bude používáno označení zkratkou DPP. V omezené míře umožňuje i úpravu snímků ve formátu JPEG. Pro formát RAW program umožňuje velké množství grafických funkcí mezi nimiž je i odstranění distorze. Distorzní model využívaný v DPP jsem bohužel nezjistil. Přesto si dovoluji odhadovat pro vysokou přesnost výsledků kalibrace v tomto programu a pro časté využívání Brownova distorzního modelu, že je použit i zde. 54
 Po spuštění programu v okně [Folder/Složka] vyhledáme požadovaný snímek typu RAW a poklepem otevřeme.")
56 Obr. 7.5: Pracovní prostředí programu Digital Photo Professional Postup odstranění distorze v DPP 1) Po spuštění programu v okně [Folder/Složka] vyhledáme požadovaný snímek typu RAW a poklepem otevřeme. 2) Zobrazíme paletu nástrojů volbou [Tool Palette/Paleta Nástrojů]. 3) V paletě nástrojů zvolíme kartu [Lens]. 4) Pod nápisem Lens data klikneme na pole [Update]. Zobrazí se databáze možných objektivů. Zvolíme objektiv použitý při snímání a potvrdíme kliknutím na pole [Start]. 5) U nápisu Lens aberration correction zvolíme pole [Tune...] 6) V otevřeném okně je kromě možností korekce periferního osvětlení a chromatické aberace možnost zaškrtnutí provedení opravy distorze [Distortion]. Jak bude výsledný snímek vypadat můžeme sledovat v témže okně. Po potvrzení polem [OK] proběhne přepočet, okno pro opravy zkreslení objektivu zmizí a získáme výsledný kalibrovaný snímek. 7) Pro další využití v programu SIMphoto provedeme export snímku do formátu JPEG volbami [File]-[Convert and Save...]. Zde zvolíme uložení ve formátu JPEG. 55
57 Výsledky: A-5D_MarkII Pro kvalitní objektiv se zanedbatelnou tangenciální distorzí vykazuje fotoplán vytvořený pomocí snímků opravených o distorzi v DPP vysokou přesnost. Směrodatné odchylky souřadnicové odpovídají přibližně přesnosti technologie testování. Jak bylo již uvedeno v případě kalibrace v programu PhotoModeler, přesnost technologie testování odhaduji přibližně na 4 mm v souřadnici. Této přesnosti výsledný fotoplán odpovídá, proto lze v tomto případě označit odstranění distorze za přesné. Přesnost výsledného fotoplánu je 4 mm v jedné souřadnici. Graf souřadnicových odchylek je uveden v příloze č. 2 graf G. Tabulka odchylek je uvedena na DVD příloze [VI] stejně jako transformační tabulka. Snímek opravený v DPP byl později využit k testování konfigurace vlícovacího podkladu. Osa Charakteristika bez kal. kal. DPP Y Max. odchylka 6,6 cm 1,0 cm směrodatná odchylka 3,8 cm 0,4 cm X Max. odchylka 4,8 cm 0,9 cm směrodatná odchylka 2,7 cm 0,4 cm Tab.7.9: Charakteristiky přesnosti kalibrace Digital Photo Professional B-450D U méně kvalitního objektivu je opět z tabulky souřadnicových odchylek i z transformační tabulky zřejmá vysoká přesnost v ose Y. V ose X je znatelné prohnutí ve tvaru luku způsobené tangenciální distorzí. Protože tangenciální distorze má náhodný charakter a je pro každý objektiv jiná, nelze ji pomocí databáze kalibračních parametrů odstranit. Přesnost výsledného fotoplánu je tedy pro rovinný objekt velikosti použitého testovacího pole přes 1 cm v jedné souřadnici. Souřadnicové odchylky byly vyneseny do grafu, který je uveden v příloze č. 1 (Graf H). 56
58 Osa Charakteristika bez kal. kal. DPP Y Max. odchylka 12,1 cm 0,7 cm směrodatná odchylka 6,5 cm 0,3 cm X Max. odchylka 16,9 cm 2,9 cm směrodatná odchylka 7,9 cm 1,3 cm Tab.7.10: Charakteristiky přesnosti kalibrace Digital Photo Professional Nikon Capture NX2 Program Capture NX2 je obdobou DPP. Jedná se též o firemní software zaměřený především na editaci snímků typu RAW. Tento program je též placený nebo jej lze získat jako příslušenství při koupi fotoaparátu. Je zde možné automatické odstranění distorze, ale pouze pro kompatibilní objektivy vyrobené firmou Nikon řady D a G. Podrobný seznam objektivů nalezneme na internetových stránkách: Vzhledem k použité technice v této práci nebylo testování přesnosti odstranění distorze v programu Capture NX2 testováno Grafické editory využívající databázi objektivů GIMP + Lensfun GIMP je software pro úpravu fotografií a rastrové grafiky. Název GIMP je zkratkou z anglického plného názvu GNU Image Program (GNU program pro úpravu obrázků). Mimo jiné grafické funkce je zde možná úprava zkreslení distorze v nabídce: [filtry]-[zkreslení]-[zkreslení objektivu]. Zde je možné pouze odhadem pomocí jezdců a linií na snímku opravit zkreslení snímku, což je pro tvorbu přesných fotoplánů nedostatečné. Více zajímavá možnost je instalace pluginu GimpLensfun. Lensfun je balíček obsahující databázi objektivů a jejich koeficientů distorze. Tato databáze je stále doplňována dobrovolníky. Kalibrace jsou prováděny v programu Hugin. Pokud ještě není požadovaný objektiv v databázi, jsou na stránkách projektu Lensfun návody pro kalibraci a žádost o odeslání výsledných koeficientů distorze správcům projektu. 57
59 Dokonce je možné pouze odeslat snímky s vhodnými horizontálními a vertikálními liniemi a správci provedou kalibraci sami a doplní daný objektiv do databáze. Výsledné koeficienty distorze jsou zapsány do excelovských tabulek a přidány do balíčku. Plug-in pro instalaci je dostupný na internetových stránkách: Lensfun/. Knihovna lensfun využívá pro odstranění distorze dva matematické modely. V prvním případě se jedná o PanoTools distorzní model a druhý model získáme jeho zjednodušením. Polynom čtvrtého řádu (poly4 = PanoTools d. m.): R U = a R + b R + c R + (1 a b c) R 4 D 3 D 2 D D, kde R U je vzdálenost od středu kalibrovaného snímku R D je vzdálenost od středu snímku s distorzí Polynom třetího řádu (poly3) R U ( k ) RD 3 = k1 RD Pro objektivy s mírnou distorzí je užíván polynom nižšího řádu (poly3) a pro objektivy s vyšší distorzí je použit poly4. Postup odstranění distorze GIMP umožňuje práci s různými formáty obrázků. Práci se snímky formátu RAW ale neumožňuje. Do programu byl tedy nahrán snímek již upravený v postprocesingu v SW Digital Photo Professional. Pokud je nainstalován plugin GimpLensfun, funkci pro eliminaci distorze najdeme pod volbami: [filtry]-[vylepšit]- [GimpLensfun]. Zde se objeví okno s dalšími nabídkami, kde je možné zadat použitý fotoaparát, objektiv a ohniskovou vzdálenost. Program je schopen si tato data získat sám z EXIF informací snímku. Kalibrace se spouští tlačítkem [Budiž]. Na základě kalibračních koeficientů získaných z databáze objektivů provede program přepočet 58
 Obr. 7.6: Pracovní prostředí softwaru GIMP Z kalibrovaných snímků byly opět vytvořeny fotoplány v SW SIMPhoto.")
60 obrazu. Takto upravený snímek je ve formátu *.xcf. Proto je snímek nutné do formátu JPEG exportovat. koeficient A_5D_MarkII B_450D a 0, b -0, , c 0-0,04063 Tab. 7.11: Koeficienty distorze z databáze Lensfun (PT distorzní model) Obr. 7.6: Pracovní prostředí softwaru GIMP Z kalibrovaných snímků byly opět vytvořeny fotoplány v SW SIMPhoto. Výsledky: A-5D_MarkII Výsledný fotoplán má přibližně shodnou přesnost v obou osách. V grafu odchylek, který je uveden v příloze č. 2 jako Graf I, směřují vektory odchylek ke středu původního snímku. To je opačný směr oproti plánu bez korekce distorze. Odstranění 59
61 radiální distorze je tedy nejspíše mírně přehnané. Vektory odchylek v ose X směřují povětšinou vlevo. To je nejspíše způsobeno mírnou tangenciální distorzí. Osa Charakteristika bez kal. kal. GIMP Y Max. odchylka 6,6 cm 1,7 cm směrodatná odchylka 3,8 cm 0,8 cm X Max. odchylka 4,8 cm 1,6 cm směrodatná odchylka 2,7 cm 0,6 cm Tab.7.12: Charakteristiky přesnosti GIMP-Lensfun B-450D Vytvořený graf s vynesenými souřadnicovými odchylkami je uveden v příloze č. 2 graf J. Z grafu vidíme nedostatečné odstranění radiální distorze i vysokou zbytkovou tangenciální distorzi. Snímek je lukovitě prohnut vpravo. Maximální odchylky dosahují 2,4 cm ve směru osy X. Směrodatné odchylky naznačují přibližně centimetrovou přesnost plánu v jedné souřadnici. Osa Charakteristika bez kal. kal. GIMP Y Max. odchylka 12,1 cm 1,7 cm směrodatná odchylka 6,5 cm 0,8 cm X Max. odchylka 16,9 cm 2,4 cm směrodatná odchylka 7,9 cm 1,2 cm Tab.7.13: Charakteristiky přesnosti GIMP-Lensfun 60
![UFRaw Program UFRaw (zdroj [29]) je další volně dostupný program pod GNU licencí. Program je možné využívat samostatně nebo je možné ho použít jako plug-in v programu GIMP (obdobně jako Lensfun).](/docs-images/56/39389475/images/62-0.jpg "Program umožňuje práci se soubory ve formátu RAW. Oprava distorze zde též proběhne na základě koeficientů distorze získaných z databáze distorzních modelů objektivů. Obr.7.")
62 UFRaw Program UFRaw (zdroj [29]) je další volně dostupný program pod GNU licencí. Program je možné využívat samostatně nebo je možné ho použít jako plug-in v programu GIMP (obdobně jako Lensfun). Program umožňuje práci se soubory ve formátu RAW. Oprava distorze zde též proběhne na základě koeficientů distorze získaných z databáze distorzních modelů objektivů. Obr.7.7:Prostředí programu UFRaw Do programu byly nahrány snímky ve formátu RAW. Program nezobrazuje úpravy, které již byly provedeny v DPP, proto je nutné je provést znovu i zde. Korekci distorze pak provedeme takto: 1) Funkce pro odstranění zkreslení objektivu najdeme pod ikonou [korekce objektivu]. Program by si měl automaticky z EXIF dat zjistit použitý fotoaparát a objektiv při snímkování. Pokud tak neučiní, můžeme provést výběr sami z úplného seznamu pomocí ikony.. 61
63 2) Korekci geometrického zkreslení najdeme pod ikonou. Jako distorzní model zvolíme PanoTools lens model. 3) Nastavíme hodnotu vzdálenosti při snímání. Ta bývá také nastavena automaticky podle exif dat. Každá ohnisková vzdálenost má své vlastní koeficienty distorze a, b, c. Databáze obsahuje vždy pouze některé ohniskové vzdálenosti, musíme tedy vybrat z nabídky tu nejbližší. Změnu snímku můžeme sledovat přímo na pracovní ploše. 4) Pro práci v SIMphotu potřebujeme snímek ve formátu JPEG. Pod ikonou najdeme možnost expotovat snímek do tohoto formátu. Výsledky: Až v průběhu testování jsem zjistil, že tento program využívá totožnou databázi jako v předchozím případě program GIMP-Lensfun. Výsledky jsou prakticky totožné. Odchylky se liší ve většině případech od hodnot z GIMPu do velikosti jednoho pixelu (2,5 mm). To značí dobrou přesnost testovací technologie. Složka s plánem a tabulkou se souř. odchylkami je součástí DVD přílohy [VI]. PTLens Program PTLens je další software pro korekci zkreslení objektivu. Pro odstranění distorze využívá též PanoTools distorzní model. Program je schopen fungovat jako: 1) Samostatná aplikace 2) Externí editor (pro Lightroom, Capture One) 3) Plug-in (pro Photoshop, PhotoLine, PaintShop) Jedná se o placený program, který byl testován ve zkušební době (10 úprav snímků). Program je určen právě pro korekce zkreslení objektivu, proto nalezneme funkce pro korekci distorze přímo po otevření programu na pracovní ploše. Data potřebná ke korekci si program opět nalezne sám v EXIFu. Pokud zde svůj objektiv 62

64 nenalezneme, můžeme o doplnění požádat tvůrce programu. Musíme mu ovšem odeslat vhodné kalibrační snímky. Podrobný návod je na internetových stránkách: Obr. 7.8: Pracovní prostředí aplikace PTLens Výsledky: Jedná se též o kalibraci s využitím PanoTools distorzního modelu a jednoduché kalibrace nejspíše v programu Hugin. Konkrétní hodnoty souřadnicových odchylek se sice liší od hodnot získaných pomocí Lensfun databáze, výsledná přesnost je však shodná. Vybočující je pouze vysoká hodnota maximální odchylky u kvalitnějšího objektivu. Ač se jedná o placený program, nelze očekávat lepší výsledky než u neplaceného Lensfunu, který poskytuje též rozsáhlou databázi objektivů (seznam distorzních profilů je uveden na stránkách PTLens [31]). 63

65 Osa Charakteristika bez kal. A_5D_MarkII B_450D Y Max. odchylka 6,6 cm 2,6 cm 1,9 cm směrodatná odchylka 3,8 cm 0,9 cm 0,8 cm X Max. odchylka 4,8 cm 1,6 cm 2,4 cm směrodatná odchylka 2,7 cm 0,5 cm 1,3 cm Tab.7.14: Charakteristiky přesnosti PTLens Adobe Photoshop Lightroom Oprava distorze na základě databáze objektivů byla provedena i v programu Lightroom. Postup i výsledky jsou obdobné jako v ostatních programech využívajících tuto metodu. Verze programu, kterou jsem měl k dispozici, má v databázi pouze malý počet objektivů. Proto byl testován pouze případ B_450D. Výsledné hodnoty jsou uvedeny v DVD příloze [VI]. Přesností opět odpovídá odstranění distorze pomocí databáze Lensfun či PTLens. Tento program i další programy společnosti Adobe umožňuje využívání různých doplňků a externích editorů, které využívají velké databáze objektivů. Například pluginy Camera Raw a DxO. Camera Raw využívá kalibraci pomocí kalibračního pole v programu Adobe Lens Profile Creator. Většina databází je však založena na jednodušší kalibraci využívající rovnání linií. Obr. 7.9: Pracovní prostředí aplikace Adobe Photoshop Lightroom 64
66 7.5.3 Zhodnocení přesnosti odstranění distorze pomocí databáze objektivů Tato technologie odstranění distorze vychází z předpokladu, že všechny objektivy stejného typu mají přibližně stejnou distorzi. Kalibrace je provedena pomocí jednoho fotoaparátu a výsledky kalibrace jsou aplikovány i na další objektivy tohoto typu. Abychom kalibraci mohli využít, musíme při snímkování využívat stejnou velikost čipu, jako při kalibraci. Tvůrci databází jsou různí. U databází vytvořených pro firemní software lze očekávat vysokou přesnost kalibrace a využívání Brownova distorzního modelu. Dále jsou vytvářeny bezplatné databáze na základě příspěvků dobrovolníků i placené, vytvářené za komerčním účelem. Ty většinou využívají jednoduchých kalibrací v neplacených programech využívajících PanoTools distorzní model. Z těchto možností bych upřednostnil odstranění distorze pomocí firemního softwaru, kde lze očekávat kvalitní kalibraci provedenou odborníky. Přesnost snímku po úpravě pak dosahuje hodnot získaných přímo kalibrací konkrétního objektivu. Snímky s nízkým vlivem tangenciální distorze pak dosahují subpixelové přesnosti. Zjištěné firemní programy s možností korekce geometrického zkreslení: Digital Photo Professional (Canon), Nikon Capture NX2, Sony Image Data Convertor, Olympus Viewer 3. Odstranění distorze pomocí databáze objektivů v běžných grafických editorech nedosahuje takové přesnosti. Případ od případu se přesnost mírně liší. Při nízkém vlivu tangenciální distorze bylo pro naše testovací pole dosaženo přesnosti do 1 cm v poloze. Zjištěné databáze či programy s databází distorzních modelů: Lensfun, PTLens, Camera Raw, DxO, Adobe Lightroom/Photoshop. 65
67 7.6 Automatické odstranění distorze Některé programy umožňují automatickou korekci distorze. Předpokládám, že tyto programy využívají detekci linií. Korekce distorze je provedena pomocí narovnání těchto linií do přímek. Matematický popis funkce automatické opravy distorze jsem nikde nenašel. Možnost této korekce distorze byla testována v aplikaci Adobe Photoshop Lightroom Adobe Photoshop Lightroom Jedná se o profesionální grafický program s velkým množstvím funkcí. Program je placený, proto bylo testování provedeno ve zkušební třicetidenní lhůtě. Do programu byly importovány snímky ve formátu JPG. Korekce zkreslení objektivu nalezneme pod nabídkami Develop-Lens_Corrections. Zde je jak již v dřívější kapitole zmiňovaná možnost najít dostupný distorzní profil, tak jsou zde čtyři možné volby pro provedení automatické opravy distorze. S distorzí je zároveň korigováno perspektivní zkreslení. Zde jsou čtyři možné volby nastavení: Auto provede korekci distorze a odstraní perspektivní zkreslení Level při korekci perspektivního zkreslení je preferována podrobnost horizontálních linií Vertical při korekci perspektivního zkreslení je preferována podrobnost vertikálních linií Full je kombinací všech předchozích - provede korekci distorze a perspektivní zkreslení ve vertikálním i horizontálním směru Pro každé z těchto nastavení jsem vytvořil při využití snímku B-450D jeden fotoplán. Na základě transformačních tabulek a pouze pár vybraných bodech jsem zjistil, že všechny plány vykazují přibližně stejnou přesnost a liší se tedy pouze v odstranění perspektivy. Dále již bylo pracováno pouze s nastavením Auto. 66
68 A-5D_MarkII Z transformační tabulky a z tabulky odchylek je zřejmé, že k odstranění radiální distorze nedošlo. Přesnost fotoplánu je přibližně stejná, jako v případě bez odstranění distotze - v několika centimetrech. Výsledky jsou trochu lepší v ose X, což může být způsobeno dobře znatelnou linií rohu budovy. Nedostatečné odstranění distorze je dobře znatelné i na grafu se souřadnicovými odchylkami (příloha 2 - Graf K) Osa Charakteristika bez kal. kal. LR_Auto Y Max. odchylka 6,6 cm 8,2 cm směrodatná odchylka 3,8 cm 4,0 cm X Max. odchylka 4,8 cm 4,3 cm směrodatná odchylka 2,7 cm 2,5 cm Tab. 7.15: Charakteristiky přesnosti Lightroom-automaticky B-450D Z transformační tabulky a tabulky odchylek je opět znatelné zlepšení přesnosti v ose X. Zde směrodatná odchylka i maximální souřadnicová odchylka klesly na polovinu. To opět přičítám dobře znatelné linii rohu budovy. Ve vertikálním směru (ose Y) ke zlepšení nedošlo. Graf se souřadnicovými odchylkami je uveden v příloze č.2 graf L. Z něj je patrná středová symetrie odchylek. To značí snížení tangenciální distorze oproti grafu B (fotoplán z neupraveného snímku). Zde je uvedena tabulka s maximálními odchylkami a souřadnicovými směrodatnými odchylkami. Osa Charakteristika bez kal. kal. LR_Auto Y Max. odchylka 12,1 cm 12,5 cm směrodatná odchylka 6,5 cm 6,7 cm X Max. odchylka 16,9 cm 8,2 cm směrodatná odchylka 7,9 cm 4,1 cm Tab. 7.16: Charakteristiky přesnosti Lightroom-automaticky 67
69 Zhodnocení: Z výsledků vyplývá, že použité nástroje automatického odstranění distorze jsou spíše určeny k odstranění periferního zkreslení a uvedení objektů (budov) na snímcích do svislé polohy. U snímku B_450D byla značně snížena tangenciální distorze. K odstranění radiální distorze nedošlo. Testování proběhlo pouze pomocí jednoho programu a se snímky, kde možná nebyly linie dostatečně patrné. I při využití vhodnějších snímků bych však neočekával významné zlepšení a už zde zjištěná nespolehlivost výsledků znemožňuje praktické využití při tvorbě fotoplánů. 7.7 Odstranění distorze v přístroji Nové kvalitní fotoaparáty mají funkci pro odstranění distorze přímo v přístroji [Distortion Control]. Ve fotoaparátu je provedena oprava distorze stejně jako ve firemním softwaru, tedy na základě databáze objektivů. Odstranění distorze ve fotoaparátu již umožňuje většina výrobců. Zde jsou uvedeny fotoaparáty značky Nikon, které automatické odstranění distorze v přístroji umožňují: D90, D3100, D3200, D5000, D5100, D7000, D4, D800 a D800E Aby mohla oprava distorze proběhnout, musí být na fotoaparátu nasazen kompatibilní objektiv, jehož distorzní parametry jsou uvedeny v databázi. Pro Nikon je aktuální seznam podporovaných objektivů uveden na internetových stránkách: Jednou za čas firma vydává aktualizaci s doplněním nových objektivů. Možnost korekce distorze v přístroji umožňují samozřejmě i další značky fotoaparátů jako Panasonic (např. LX3, LX5), Olympus ( MicroFour Thirds E-P2, E-P3) či Canon (Powershot S90, S30). Opraven je obraz ve formátu JPEG. Pokud pořizujeme snímky ve formátu RAW i JPEG, tak RAW obsahuje neopravená data vyžadující další zpracování ve firemním softwaru. 68
70 Nevýhodou této metody může být delší doba pořizování snímku. Výhodou je, že přímo ve fotoaparátu již vidíme snímek bez distorze a nepřekvapí nás později ztráta části obrazu způsobená právě odstraněním distorze. Pracujeme-li s formátem RAW, nesmíme zapomenout, že pro tento formát korekce distorze neproběhla a musíme ji opravit v postprocesingu (v DPP či NX2). Přesnost této metody by měla odpovídat korekci ve firemním softwaru. Čerpáno z [10] a [11]. 7.8 Odstranění distorze pomocí jezdce Odstranění distorze pomocí jezdce (posuvníku) umožňuje většina grafických softwarů (např. GIMP, UFRaw, ShiftN, Adobe Photoshop Lightroom,...). Programy využívají jednoho až dvou posuvníků. Používané distorzní modely s kterými jsem se setkal jsou uvedeny v podkapitole Odstranit je možné pouze radiální distorzi. Odstranění distorze je prováděno na základě opravy linií na snímcích do přímky. Pro lepší orientaci při úpravě umožňují programy zobrazení mřížky. Přesnost této kalibrace nelze objektivně hodnotit. Záleží na kvalitě kalibračních snímků i na přesnosti hodnotitele. Testování bylo provedeno v programu ShiftN při tvorbě bakalářské práce [1]. Zde byl proveden test pro kombinaci fotoaparátu a objektivu zde označovaného A s nastavením ohniskové vzdálenosti na hodnotu 16 mm. Maximální odchylky pro totéž testovací pole dosahovaly 3,7 cm. Předpokládám tedy, že pro objekt velikosti našeho testovacího pole můžeme očekávat přesnost výsledného plánu v rámci jednotlivých centimetrů. 69
71 8 Testování vlivu konfigurace vlícovacích bodů Testování vlivu konfigurace vlícovacího podkladu bylo provedeno pomocí snímků s přesným odstraněním distorze pomocí programu Digital Photo Professional. Plány byly vytvořeny pomocí čtyř vlícovacích bodů. To by mělo odpovídat situaci, kdy tvůrce fotoplánu má k určení souřadnic vlícovacích bodů k dispozici pouze pásmo. Testovány byly případy, kdy vlícovací body jsou umístěny: a) V rozích testovacího pole b) V třetině testovacího pole c) V šestině testovacího pole d) Ve dvanáctině testovacího pole Obr. 8.1: Případy konfigurace vlícovacích bodů Pro každý z těchto případů byl vytvořen fotoplán a následně byl proveden odečet odchylek souřadnic určených z fotoplánu se souřadnicemi určenými geodetickým zaměřením. V následující tabulce jsou uvedeny hodnoty maximálních odchylek v souřadnici a směrodatné odchylky charakterizující přesnost fotoplánu. Osa Charakteristika celá třetina šestina dvanáctina Max. odchylka 1,1 cm 2,2 cm 2,9 cm 17,2 cm Y směrodatná odchylka 0,5 cm 0,9 cm 1,1 cm 6,2 cm X Max. odchylka 1,0 cm 1,7 cm 2,2 cm 9,6 cm směrodatná odchylka 0,4 cm 0,8 cm 1,1 cm 3,6 cm Tab. 8.1: Charakteristiky přesnosti při různé konfiguraci vlícovacích bodů 70
72 Přesnost plánu se snižuje se vzdáleností od oblasti s výskytem vlícovacích bodů. Proto byly vytvořeny grafy zobrazující tuto skutečnost. Pro každou horizontální linii bodů testovacího pole byla vypočtena průměrná polohová odchylka: p φ 2 vxi + v = n kde index i je pořadí bodu v horizontální linii, n je celkový počet bodů v horizontální linii. 2 yi, Vytvořené grafy uvedené v příloze č. 8 pak zobrazují vývoj polohové odchylky v závislosti na výšce (ose Y). Grafy jsou vytvořeny dva pro zobrazení lepší podrobnosti. Grafy souřadnicových odchylek jsou opět uvedeny v příloze č. 2. Zhodnocení: a) Graf M - Jedná se o ideální případ s umístěním vlícovacích bodů v rozích výsledného fotoplánu. Z grafu souřadnicových odchylek a grafu uvedeného v příloze č. 8 je patrná vysoká přesnost tohoto plánu. Vyšší odchylky se vyskytují pouze v šesté horizontální linii. To můžeme přisoudit hloubkové členitosti testovacího pole (vyboulení) v této oblasti. b) Graf N - Při využití vlícovacích bodů v dolní jedné třetině fotoplánu dosahují souřadnicové odchylky v horní části až dvojnásobných hodnot oproti předchozímu případu. Souřadnicové odchylky směřují vzhůru a vlevo došlo k přílišnému protažení snímku vzhůru a odchýlení vlevo. Stejný směr mají odchylky na využitých vlícovacích bodech 110 a 114. Na těchto bodech jsou odchylky velikosti jednoho až dvou pixelů. Odchylky v horní části plánu dosahují desetinásobku. c) Graf O - Při použití vlícovacích bodů v jedné šestině se snížila přesnost oproti předchozímu případu jen mírně. Maximální souřadnicové odchylky dosahují necelých tří centimetrů. V levé části směřují vektory dolů a v pravé vzhůru. Ve střední části dochází ke střetu těchto trendů, což způsobuje vyšší přesnost v této oblasti. Směry vektorů opět přibližně odpovídají směrům na horních vlícovacích bodech. 71
73 d) Graf P Při použití vlícovacích bodů pouze ve dvanáctině fotoplánu dojde k radikálnímu zhoršení přesnosti a protažení snímku směrem od vlícovacích bodů. Maximální odchylky činí až 17 cm. Proč tomu tak je, zjistíme při pohledu na graf M či G. Zde vidíme na bodech 102 a 107 vektory směřující vlevo způsobené tangenciální distorzí. Při využití těchto bodů pro transformaci snímku dojde k protažení snímku opačným směrem, než vektory směřují. Pokud souřadnicové odchylky dvou bodů v grafu G směřují k sobě a využijeme je jako vlícovací body (nikoli v úhlopříčce), dojde ve směru od vlícovacího podkladu k roztažení snímku do stran. Situace platí i naopak. Ve vertikálním směru způsobila roztažení dvojice bodů 102, 107. Celkové zhodnocení vlivu konfigurace vlícovacího podkladu na přesnost Jaký je vliv konfigurace vlícovacího podkladu nelze příliš generalizovat. Máme tři faktory, které vliv konfigurace VB ovlivňují: 1) přesnost souřadnic VB 2) přesnost odstranění distorze 3) přesnost identifikace vlícovacích bodů Budeme-li mít snímek bez distorze, přesné souřadnice VB a dokážeme-li je na snímku přesně identifikovat, tak na konfiguraci bodů vlícovacího podkladu nezáleží. Důkazem toho je porovnání výsledků při použití stejného fotoaparátu a objektivu v BP a DP v případě umístění vlícovacích bodů ve třetině testovacího pole. V bakalářské práci dosahuje maximální souř. odchylka 7,2 cm a v diplomové práci pouze 2,2 cm. To je důsledkem zpřesnění všech tří výše uvedených faktorů. Lze si povšimnout, že přesnost plánu se významně snížila až při využití vlícovacích bodů pouze v jedné dvanáctině TP. Tento jediný případ nevyužívá vlícovací podklad souměrný podle osy snímku. Ve všech případech odstraňování distorze byla téměř beze zbytku odstraněna distorze radiální. Je tedy vhodné používat vlícovací body umístěné symetricky vzhledem k osám snímku. Samozřejmě také platí zásada, že čím větší pokrytí vlícovacími body, tím se na výslednou přesnost můžeme více spolehnout. 72

74 9 Obrazová kvalita fotoplánů Obrazovou kvalitou se v této práci zabývám pouze okrajově. I při postprocesingu bylo dbáno spíše na geometrickou kvalitu, než na věrnost barev. To je dobře patrné na následujících případech, kdy je patrný značný rozdíl mezi tónem barev v dolní a horní části snímku. Ukázány jsou zde případy při využití kvalitnějšího fotoaparátu (snímky A_5D_MarkII). a) První řada obrázků zobrazuje část plánu v dolní části testovacího pole z těchto plánů: 1) bez korekce distorze 2) jedna kalibrace na základě kalibrace v PM oprava v SIMphotu 3) dvě po sobě jdoucí kalibrace v PM dvě opravy v SIMphotu Obr. 9.1: Obrazová kvalita v dolní části fotoplánu Vidíme znatelné zhoršení kvality s každou transformací rastrového obrazu. U plánu bez odstranění distorze je možné pohodlně přečíst každou číslici. V případě dvou kalibrací je již čtení obtížné. Vidíme zde tedy velký vliv každé transformace na výslednou obrazovou kvalitu. 73

75 b) V tomto případě se jedná o stejné fotoplány, ale výřezy jsou pořízeny z výšky dvou třetin testovacího pole. Obr. 9.2: Obrazová kvalita ve výšce dvou třetin fotoplánu V tomto případě je obrazová kvalita snímku zhoršena snímkováním testovacího pole z podhledu, a tedy z větší vzdálenosti a pod vyšším úhlem. Výřezy se od případu a liší tónem barvy i podrobností. c) Zde ještě uvádím pro oba případy rozdíl mezi snímkem pouze uloženým do formátu JPEG a snímkem, který byl uložen v RAWu a následně upraven v DPP. Obr. 9.3: Rozdíl mezi snímkem ve formátu JPEG a snímkem uloženým v RAWu a upraveným v DPP 74
76 Shrnutí: Pro zajištění vyšší obrazové kvality fotoplánu bychom se při snímkování měli snažit o získání frontálního snímku (či jemu blízkému). Velké možnosti zkvalitnění snímku také získáme ukládáním do RAWu s následným využitím postprocesingu ve firemním programu. Při odstraňování distorze a tvorbě fotoplánu se snažíme o co nejnižší počet přepočtů obrazu. 75
77 10 Závěr V této práci byly testovány různé vlivy na přesnost fotoplánu za použití neměřických fotoaparátů. Důraz byl kladen na způsoby odstranění distorze, která má na přesnost fotoplánu velký vliv. Dále byl testován vliv konfigurace vlícovacího podkladu a okrajově i obrazová kvalita získaných fotoplánů. Testování bylo provedeno na základě geodeticky zaměřeného testovacího pole o rozměrech 9 ä 15 m, stejného, jako v mé bakalářské práci [1]. Měření bylo provedeno totální stanicí pomocí tří měřických základen. Výpočet souřadnic byl proveden na základě vyrovnání v programu Gama. Testovací pole má hloubkové členění do 6 mm. Ve výpočtech je vliv hloubkového členění zanedbáván. V hodnocení je ho však nutné zohlednit. Při testování jsou užívány absolutní hodnoty, které samozřejmě platí pouze pro daný speciální případ (velikost objektu, konfigurace snímků, použitý objektiv). Přesto si myslím, že lze z výsledků vyvozovat i obecné závěry. Nejprve bylo provedeno testování odstranění distorze na základě kalibrace ve fotogrammetrických softwarech. Zde bylo dosaženo přesných výsledků. Na základě kalibrace je možné zcela eliminovat radiální distorzi. Odstranění tangenciální distorze je matematicky náročnější a mají s tím potíže i tyto kalibrační programy. Lépe se podařilo tuto distorzi odstranit na základě dvou kalibrací stejných snímků, jedná se však o další transformaci obrazu zhoršující obrazovou kvalitu výsledného fotoplánu viz kapitola 9. Proto bych tuto variantu příliš nedoporučoval. V současné době využívá mnoho programů možnost odstranění distorze na základě databáze objektivů. Tento způsob vychází ze skutečnosti, že všechny objektivy téhož typu mají téměř shodnou distorzi. Zde bylo dosaženo v naší situaci pro kvalitnější objektiv v nejlepších případech přesnosti pod 1 cm v souřadnici a u méně kvalitního objektivu s tangenciální distorzí dosahuje směrodatná odchylka v jedné souřadnici necelých 1,5 cm. Tento způsob korekce geometrického zkreslení může být v mnoha případech dostatečnou variantou. Programy využívající databázi objektivů jsou často bezplatné a odstranění distorze v nich je nenáročné (např. Gimp-Lensfun, UFRaw) 76
78 Výhodou může být, pokud máme možnost využívat firemní software. V této práci byl testován firemní program značky Canon Digital Photo Professional. Ten také pracuje s databází objektivů. Ne však na základě jednoduchých kalibrací dobrovolníků, ale pomocí přesných měření distorzních parametrů výrobcem. Tato možnost odpovídá přesností kalibraci ve fotogrammetrickém programu. Tato varianta předpokládá pořizování snímků ve formátu RAW. S odstraněním distorze můžeme pak provádět zároveň i další grafické úpravy snímku, které formát JPEG neumožňuje. Dalším výrobcem poskytujícím tuto možnost je firma Nikon s programem Capture NX2. Variantu odstranění distorze přímo v přístroji poskytují jen některé kvalitní fotoaparáty. Výsledek by měl odpovídat korekci ve firemním softwaru. Výhodou je, že můžeme sledovat výsledný obraz přímo na displeji fotoaparátu a nestane se nám, že na počítači zjistíme, že po korekci distorze nám důležitá část obrazu chybí. Odstranění distorze pomocí posuvníků či automatické odstranění distorze nepovažuji za vhodné, pro tvorbu fotoplánů při možnostech, které dnes jsou. Vliv konfigurace vlícovacího podkladu nelze jednoduše popsat. Závisí na více vlivech. Největší podíl lze asi připsat přesnosti odstranění distorze. Dále je nutné, aby použitý vlícovací měl dostatečnou přesnost. Obě tyto skutečnosti byly v diplomové práci oproti bakalářské práci zlepšeny a lze sledovat značné zlepšení získaných fotoplánů za stejné konfigurace vlícovacího podkladu. Přesto bych uvedl i další doporučení vycházející z výsledků testování: a) Je vhodné využívat pro transformaci vlícovací podklad symetrický podle některé ze snímkových os. Využijeme tak vysokou přesnost odstranění radiální distorze, která je podstatně lepší, než přesnost odstranění distorze tangenciální. b) Přesnost se snižuje se vzdáleností od bodů vlícovacího podkladu, proto je samozřejmě vhodné pokrýt vlícovacími body co největší část výsledného fotoplánu. c) Využitím pouze čtyř bodů pro kolineární transformaci je značně nebezpečné. Předpokládá výbornou přesnost zaměření vlícovacích bodů i snímek bez distorze. Raději tedy určeme více vlícovacích bodů (třeba i ne příliš vzdálených), aby byla možná 77
79 kontrola pomocí transformační tabulky získané vyrovnáním. Tak zjistíme i přibližnou přesnost fotoplánu. V kapitole 9 je posuzována obrazová kvalita snímků při různém počtu transformace rastrového obrazu. Zde je patrné zhoršení kvality při každém přepočtu. Také je zde patrné snižování kvality v závislosti na úhlu snímkování. V našem případě nebylo možné zajistit radiální snímek, proto se kvalita obrazu velice snižuje s jeho výškou. Z posledního porovnání je zřejmé velké zlepšení obrazu při ukládání snímků do RAWu a následném postprocesingu. V této diplomové práci jsem se pokusil na základě množství různých dat zkoumat cesty k vytvoření co nejpřesnějšího fotoplánu za nepříznivých podmínek při jeho tvorbě. Doufám, že mé závěry budou mít praktické využití a dopomohou k vytváření kvalitních fotoplánů i lidem s omezenými přístrojovými možnostmi. V oblasti grafických programů a jejich možností nelze obsáhnout vše, protože se stále vyvíjí. Bylo by vhodné pokračovat ve výzkumu především dalších kalibračních programů (např. kalibrační toolbox v Matlabu), jejich možnostmi a přesností odstranění distorze (to je však ztíženo dostupností těchto programů). Doporučil bych také více se zabývat obrazovou kvalitou, a tedy přímo používanými interpolacemi pixelů a možnostmi dodatečného doostření. 78
80 11 Seznam použité literatury [1] TRÖSTL, Martin. Testování vlivu vybraných parametrů na kvalitu fotoplánu. Praha s.bakalářská práce, ČVUT, Fakulta stavební [2] PAVELKA, Karel. Fotogrammetrie 1. únor 2009, ČVUT Praha, 200 s. ISBN [3] BŘEZINA, Petr. Nová poloprofi třída: Canon EOS 5D Mark II.[online]. [cit ]. Dostupné z WWW: < [4] HONČ, Tomáš. Totální stanice Trimble [online]. [cit ]. Dostupné z WWW: < [5] SIMphoto.. jednoduchá jednosnímková fotogrammetrie. [online]. [cit ]. Dostupné z WWW: [6] ČÍŽEK, David. Tvorba software pro jednosnímkovou fotogrammetrii. Praha Diplomová práce, ČVUT, Fakulta stavební [7] PhotoModeler. [online]. [cit ]. Dostupný z WWW: < [8] PROKOUDINE, Alexandre. Creating lens distortion models with Hugin s lens calibrator. [online]. [cit ]. Dostupné z WWW: < [9] Lensfun. [online]. [cit ]. Dostupné z WWW: < [10] Geometric distortion correction. [online]. [cit ]. Dostupné z WWW: < [11] CHEN, Janice. Is in-camera lens distortion correction cheating or not?. [online]. [cit ]. Dostupné z WWW: < 79
81 [12] BOUGUET, Jean-Yves. Camere Calibration Toolbox for Matlab. [online]. [cit ]. Dostupné z WWW: < [13] Agisoft Lens User Manual. [online]. [cit ]. Dostupné z WWW: [14] Digtal Photo Professional Ver 3.9. Instruction Manual. [online]. [cit ]. Dostupné z WWW: < [15] Capture NX2 User s Manual. [online]. [cit ]. Dostupné z WWW: < f> [16] ČEPEK, Aleš. GNU Gama [online]. [cit ]. Dostupné z WWW: < [17] Distortion (Optics). [online]. [cit ]. Dostupné z WWW: < [18] Březina, Petr. Co je crop faktor?. [online]. [cit ]. Dostupné z WWW: < [19] Distortion Explained. [online]. [cit ]. Dostupné z WWW: < [20] DUANE, C. BRowN. Close-range camera calibration. Photogrammetric engineering, 1971, 37.8: [21] ZHANG, Zhengyou. A flexible new technique for camera calibration. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 2000, 22.11: [22] Lens correction model. [online]. [cit ]. Dostupné z WWW: < [23] Correcting distortion with DxO ViewPoint 2. [online]. [cit ]. Dostupné z WWW: < 80
82 [24] BŘEZINA, Jiří. Optické korekce v kameře. [online]. [cit ]. Dostupné z WWW: < [25] PILI, Fábio. Lens distortion correction on post-processing. [online]. [cit ]. Dostupné z WWW: < [26] Imatest. [online]. [cit ]. Dostupné z WWW: < [27] Calculating lens distortion. [online]. [cit ]. Dostupné z WWW: < [28] DERSCH. Helmut. Articles and Software. [online]. [cit ]. Dostupné z WWW: < [29] UFRaw. [online]. [cit ]. Dostupné z WWW: < [30] KOSKA, Bronislav. What units PS use for distortion parameters? [online]. [cit ]. Dostupné z WWW: < [31] PTLens. [online]. [cit ]. Dostupné z WWW: < 81
83 12 Seznam příloh 1) Přehledka bodů testovacího pole 2) Grafy souřanicových odchylek 3) Seznam souřadnic bodů testovacího pole 4) Porovnání seznamů souřadnic: 1. etapa obě etapy 5) Výsledky 1. kalibrace v programu PhotoModeler Scaner 6) Výsledky 2. kalibrace v programu PhotoModeler Scaner 7) Sklopení souřadnic do roviny 8) Testování min. vlícovacího podkladu graf polohových odchylek 9) Souhrnné tabulky přesnosti odstranění distorze (typické případy) 10) Seznam DVD příloh 82
84 Příloha 1 Přehledka bodů testovacího pole 83
85 Příloha 2 Grafy souřadnicových odchylek 84

86 85
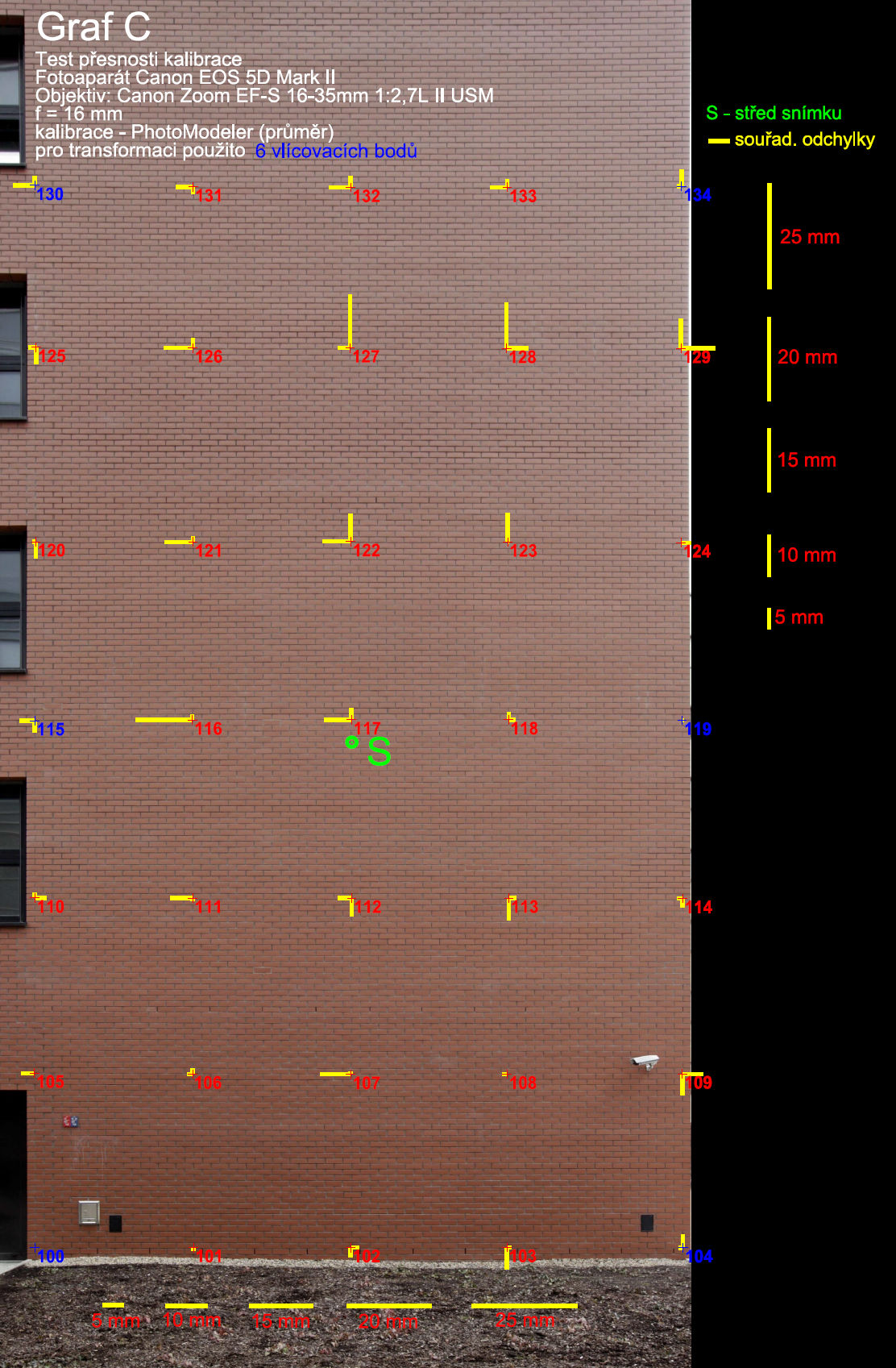
87 86
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2012 Martin Tröstl ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE Vedoucí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2012 Martin Tröstl ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE Vedoucí
Testování programu PhotoScan pro tvorbu 3D modelů objektů. Ing. Tomáš Jiroušek
 Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE
 ZÁKLADY FOTOGRAMMETRIE") SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM
 Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
4.1 Základní pojmy Zákonné měřicí jednotky.
 4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny
 Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ
 Komora geodetů a kartografů ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ Ing. Jaroslav Braun 1 Ing. Martin Lidmila, Ph.D. 2 doc. Ing. Martin Štroner, Ph.D. 1 1 Katedra speciální geodézie,
Komora geodetů a kartografů ZAMĚŘENÍ PŘETVOŘENÍ ŽELEZNIČNÍHO MOSTU V KLÁŠTERCI NAD OHŘÍ Ing. Jaroslav Braun 1 Ing. Martin Lidmila, Ph.D. 2 doc. Ing. Martin Štroner, Ph.D. 1 1 Katedra speciální geodézie,
Rychlý manuál. pro uživatele softwaru Trimble ACCESS v totálních stanicích. Listopad 2015 MM
 Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE 2015 Alexander Vachuška ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE 2015 Alexander Vachuška ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv.
 3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Pavel KAVÁLEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Studijní program: GEODÉZIE A KARTOGRAFIE Studijní obor:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Pavel KAVÁLEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Studijní program: GEODÉZIE A KARTOGRAFIE Studijní obor:
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství. Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ. VOŠ a SŠS Vysoké Mýto leden 2008
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
DIGITÁLNÍ ORTOFOTO. SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník
 DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
Práce s texty, Transformace rastru, Připojení GPS
 Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
6.1 Základní pojmy - zákonné měřící jednotky
 6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
Panoramatická fotografie
 Panoramatická fotografie Jan Hnízdil xhnij08@vse.cz VŠE Praha Fakulta informatiky a statistiky Panoramatická fotografie p.1/37 Osnova Panoramatická fotografie, jak jí vytvořit, programy na tvorbu panoramatických
Panoramatická fotografie Jan Hnízdil xhnij08@vse.cz VŠE Praha Fakulta informatiky a statistiky Panoramatická fotografie p.1/37 Osnova Panoramatická fotografie, jak jí vytvořit, programy na tvorbu panoramatických
Terestrické 3D skenování
 Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie
 4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie Podle orientace osy záběru dělíme snímky ve fotogrammetrii na snímky svislé (kolmé), šikmé, ploché a horizontální
4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie Podle orientace osy záběru dělíme snímky ve fotogrammetrii na snímky svislé (kolmé), šikmé, ploché a horizontální
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
Vytyčení polohy bodu polární metodou
 Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Měřická dokumentace používané metody
 Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin
 Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
Rozdělení přístroje zobrazovací
 Optické přístroje úvod Rozdělení přístroje zobrazovací obraz zdánlivý subjektivní přístroje lupa mikroskop dalekohled obraz skutečný objektivní přístroje fotoaparát projekční přístroje přístroje laboratorní
Optické přístroje úvod Rozdělení přístroje zobrazovací obraz zdánlivý subjektivní přístroje lupa mikroskop dalekohled obraz skutečný objektivní přístroje fotoaparát projekční přístroje přístroje laboratorní
Stereofotogrammetrie
 Stereootogrammetrie Princip stereoskopického vidění a tzv. yziologické paralaxy Paralaxa je relativní změna v poloze stacionárních objektů způsobená změnou v geometrii pohledu. horizontální yziologická
Stereootogrammetrie Princip stereoskopického vidění a tzv. yziologické paralaxy Paralaxa je relativní změna v poloze stacionárních objektů způsobená změnou v geometrii pohledu. horizontální yziologická
Pořízení rastrového obrazu
 Pořízení rastrového obrazu Poznámky k předmětu POČÍTAČOVÁ GRAFIKA Martina Mudrová duben 2006 Úvod Nejčastější metody pořízení rastrového obrazu: digitální fotografie skenování rasterizace vektorových obrázků
Pořízení rastrového obrazu Poznámky k předmětu POČÍTAČOVÁ GRAFIKA Martina Mudrová duben 2006 Úvod Nejčastější metody pořízení rastrového obrazu: digitální fotografie skenování rasterizace vektorových obrázků
Zaměření vybraných typů nerovností vozovek metodou laserového skenování
 Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Úpravy fotografie s kalibrační tabulkou x-rite do verze adobe phostohop CS5 a camera RAW 6 (proces 2010)
") Úpravy fotografie s kalibrační tabulkou x-rite do verze adobe phostohop CS5 a camera RAW 6 (proces 2010) S tabulkou x-rite se můžete setkat především v reklamní a reprodukční fotografii. Umožnuje udržet
Úpravy fotografie s kalibrační tabulkou x-rite do verze adobe phostohop CS5 a camera RAW 6 (proces 2010) S tabulkou x-rite se můžete setkat především v reklamní a reprodukční fotografii. Umožnuje udržet
DronFest TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii
 TOPGEOSYS s.r.o. DronFest 2018 - TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii Ing. Václav Šafář,Ph.D. 1.června 2018 areál DEPO2015 TOPGEOSYS s.r.o. AUTORIZOVANÝ PRODEJ PHASEONE INDUSTRIAL PRO ČESKOU
TOPGEOSYS s.r.o. DronFest 2018 - TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii Ing. Václav Šafář,Ph.D. 1.června 2018 areál DEPO2015 TOPGEOSYS s.r.o. AUTORIZOVANÝ PRODEJ PHASEONE INDUSTRIAL PRO ČESKOU
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
III/ 2 Inovace a zkvalitnění výuky prostřednictvím ICT
 Metodický list k didaktickému materiálu Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu Autor Jazyk Téma sady didaktických materiálů Téma didaktického materiálu Vyučovací
Metodický list k didaktickému materiálu Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu Autor Jazyk Téma sady didaktických materiálů Téma didaktického materiálu Vyučovací
K přesnosti volného stanoviska
 K přesnosti volného stanoviska MDT Doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Abstrakt Článek se zabývá rozborem přesnosti a vyvozením obecnějších závěrů pro přesnost určení souřadnic
K přesnosti volného stanoviska MDT Doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Abstrakt Článek se zabývá rozborem přesnosti a vyvozením obecnějších závěrů pro přesnost určení souřadnic
Metodický pokyn. k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území
 Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
57. Pořízení snímku pro fotogrammetrické metody
 57. Pořízení snímku pro fotogrammetrické metody Zpracoval: Tomáš Kobližek, 2014 Z{kladní informace Letecká fotogrammetrie nad 300 m výšky letu nad terénem (snímkovací vzdálenosti) Uplatnění mapování ve
57. Pořízení snímku pro fotogrammetrické metody Zpracoval: Tomáš Kobližek, 2014 Z{kladní informace Letecká fotogrammetrie nad 300 m výšky letu nad terénem (snímkovací vzdálenosti) Uplatnění mapování ve
DZDDPZ3 Digitální zpracování obrazových dat DPZ. Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava
 DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
5.1 Definice, zákonné měřící jednotky.
 5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty Ing. Jakab Barnabáš
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Anotace: Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Anotace: Inovace a zkvalitnění výuky prostřednictvím ICT Technické vybavení Digitální fotoaparáty
Cvičení software Groma základní seznámení
 Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Digitální fotoaparáty, základy digitální fotografie
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Digitální fotoaparáty, základy digitální fotografie Obsah Obsah...1 Digitální fotoaparáty...3 Základní rozdělení...3
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Digitální fotoaparáty, základy digitální fotografie Obsah Obsah...1 Digitální fotoaparáty...3 Základní rozdělení...3
Digitální astronomická. fotografie. zimní semestr Radek Prokeš. FJFI ČVUT v Praze
 Fyzikální seminář zimní semestr 2009 Digitální astronomická Digitální astronomická fotografie Radek Prokeš FJFI ČVUT v Praze 15. 10. 2009 Digitální astronomická fotografie Digitální astronomická fotografie!
Fyzikální seminář zimní semestr 2009 Digitální astronomická Digitální astronomická fotografie Radek Prokeš FJFI ČVUT v Praze 15. 10. 2009 Digitální astronomická fotografie Digitální astronomická fotografie!
DIGITÁLNÍ FOTOGRAFIE
 DIGITÁLNÍ FOTOGRAFIE - princip digitalizace obrazu, části fotoaparátů, ohnisková vzdálenost, expozice, EXIF data, druhy digitálních fotoaparátů Princip vzniku digitální fotografie digitální fotoaparáty
DIGITÁLNÍ FOTOGRAFIE - princip digitalizace obrazu, části fotoaparátů, ohnisková vzdálenost, expozice, EXIF data, druhy digitálních fotoaparátů Princip vzniku digitální fotografie digitální fotoaparáty
Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací
 Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací The two-step method calibration of digital camera utilizing non-linear transformation V. Obr, B. Koska* vitezslav.obr@fsv.cvut.cz
Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací The two-step method calibration of digital camera utilizing non-linear transformation V. Obr, B. Koska* vitezslav.obr@fsv.cvut.cz
KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY
 KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY K1655_CMYK.indd 35 10.3.2009 13:41:01 Podkladové fotografie jsou alfou a omegou pro vytváření panoramatických záběrů Proces tvorby digitálních panoramat začíná
KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY K1655_CMYK.indd 35 10.3.2009 13:41:01 Podkladové fotografie jsou alfou a omegou pro vytváření panoramatických záběrů Proces tvorby digitálních panoramat začíná
Digitální fotoaparáty a digitalizace map
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Digitální fotoaparáty a digitalizace map semestrální práce Martina Jíšová Petr Dvořák editor:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Digitální fotoaparáty a digitalizace map semestrální práce Martina Jíšová Petr Dvořák editor:
Digitální kartografie 3
 Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
Gymnázium Vincence Makovského se sportovními třídami Nové Město na Moravě
 VY_32_INOVACE_INF_BU_08 Sada: Digitální fotografie Téma: Krajina, panorama Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití: Prezentace určená pro
VY_32_INOVACE_INF_BU_08 Sada: Digitální fotografie Téma: Krajina, panorama Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití: Prezentace určená pro
Úloha č. 1 : TROJÚHELNÍK. Určení prostorových posunů stavebního objektu
 Václav Čech, ČVUT v Praze, Fakulta stavební, 008 Úloha č. 1 : TROJÚHELNÍK Určení prostorových posunů stavebního objektu Zadání : Zjistěte posun bodu P do P, umístěného na horní terase Stavební fakulty.
Václav Čech, ČVUT v Praze, Fakulta stavební, 008 Úloha č. 1 : TROJÚHELNÍK Určení prostorových posunů stavebního objektu Zadání : Zjistěte posun bodu P do P, umístěného na horní terase Stavební fakulty.
Určení svislosti. Ing. Zuzana Matochová
 Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
Určení svislosti Ing. Zuzana Matochová Svislost stěn Jedná se o jeden z geometrických parametrů, který udává orientaci části konstrukce vzhledem ke stanovenému směru. Geometrické parametry jsou kontrolovány
Gymnázium Vincence Makovského se sportovními třídami Nové Město na Moravě
 VY_32_INOVACE_INF_BU_02 Sada: Digitální fotografie Téma: Základy ovládání digitálního fotoaparátu Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití:
VY_32_INOVACE_INF_BU_02 Sada: Digitální fotografie Téma: Základy ovládání digitálního fotoaparátu Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití:
Fotogammetrie. Zpracoval: Jakub Šurab, sur072. Datum:
 Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
T a c h y m e t r i e
 T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP
 Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky. Bakalářská práce. Určení prvků vnitřní orientace digitálního fotoaparátu
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Bakalářská práce Určení prvků vnitřní orientace digitálního fotoaparátu Plzeň, 2014 Alžběta Hofmanová Originál zadání práce je
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Bakalářská práce Určení prvků vnitřní orientace digitálního fotoaparátu Plzeň, 2014 Alžběta Hofmanová Originál zadání práce je
DIGITÁLNÍ FOTOGRAFIE
 DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
EasyNET Analyser verze 1.1.2
 EasyNET Analyser verze 1.1.2 Komplexní softwarová analýza etapových měření Softwarová dokumentace V Praze dne 20. 06. 2015 Obsah 1 Úvod... 4 2 Základní vlastnosti programu... 4 2.1 Detekce pozorovaných
EasyNET Analyser verze 1.1.2 Komplexní softwarová analýza etapových měření Softwarová dokumentace V Praze dne 20. 06. 2015 Obsah 1 Úvod... 4 2 Základní vlastnosti programu... 4 2.1 Detekce pozorovaných
Kalibrace snímků. Jakub Šolc
 Kalibrace snímků fotogrammetrie s běžným digitálním aparátem Jakub Šolc Úvod Fotogrammetrie je obor, který se zabývá analýzou geometrických vztahů mezi objekty, jež jsou zachyceny na fotografickém snímku.
Kalibrace snímků fotogrammetrie s běžným digitálním aparátem Jakub Šolc Úvod Fotogrammetrie je obor, který se zabývá analýzou geometrických vztahů mezi objekty, jež jsou zachyceny na fotografickém snímku.
ČVUT v Praze, Fakulta stavební, Katedra mapování a kartografie Diplomová práce ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA MAPOVÁNÍ A KARTOGRAFIE DIPLOMOVÁ PRÁCE Fotogrammetrická dokumentace vybrané části hradu Kost (okr. Jičín) Photogrammetric documentation of
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ KATEDRA MAPOVÁNÍ A KARTOGRAFIE DIPLOMOVÁ PRÁCE Fotogrammetrická dokumentace vybrané části hradu Kost (okr. Jičín) Photogrammetric documentation of
III/ 2 Inovace a zkvalitnění výuky prostřednictvím ICT
 Metodický list k didaktickému materiálu Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu Autor Jazyk III/ 2 Inovace a zkvalitnění výuky prostřednictvím ICT EU-OPVK-VT-III/2-SO-215
Metodický list k didaktickému materiálu Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu Autor Jazyk III/ 2 Inovace a zkvalitnění výuky prostřednictvím ICT EU-OPVK-VT-III/2-SO-215
Měření deformací betonového nosníku III během zátěžové zkoušky. Deformation measurement of concrete beam III during a strain test
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 154 Katedra speciální geodézie Měření deformací betonového nosníku III během zátěžové zkoušky Deformation measurement of concrete beam III during a strain test bakalářská
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 154 Katedra speciální geodézie Měření deformací betonového nosníku III během zátěžové zkoušky Deformation measurement of concrete beam III during a strain test bakalářská
Digitální fotografie. Mgr. Milana Soukupová Gymnázium Česká Třebová
 Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie. Mgr. Milana Soukupová Gymnázium Česká Třebová
 Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA
 Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
Dokumentace funkčního vzorku Nástavce pro měření laserovým dálkoměrem na kotevních bodech liniových instalací BOTDA vyvinutého v rámci řešení projektu FR-TI3/609 Výzkum a vývoj detekce a kontrolního sledování
SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE
 SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE (Řešení kruţnicových oblouků v souřadnicích) 3. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec 2015
SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE (Řešení kruţnicových oblouků v souřadnicích) 3. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec 2015
Praktická geometrická optika
 Praktická geometrická optika Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická,
Praktická geometrická optika Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická,
7. Určování výšek II.
 7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
SPŠ STAVEBNÍ České Budějovice GEODÉZIE. Teodolit a měření úhlů
 SPŠ STAVEBNÍ České Budějovice GEODÉZIE Teodolit a měření úhlů ještě doplnění k výškovému systému jadranský systém udává pro stejný bod hodnotu výšky o cca 0,40 m větší než systém Bpv Potřebujeme vědět
SPŠ STAVEBNÍ České Budějovice GEODÉZIE Teodolit a měření úhlů ještě doplnění k výškovému systému jadranský systém udává pro stejný bod hodnotu výšky o cca 0,40 m větší než systém Bpv Potřebujeme vědět
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Miloslav PŮBAL ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE Hrad
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Miloslav PŮBAL ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE Hrad
Digitální fotografie
 Digitální fotografie Mgr. Jaromír Basler jaromir.basler@upol.cz Pedagogická fakulta, Univerzita Palackého v Olomouci Katedra technické a informační výchovy Digitální fotografie Zachycení obrazu za pomocí
Digitální fotografie Mgr. Jaromír Basler jaromir.basler@upol.cz Pedagogická fakulta, Univerzita Palackého v Olomouci Katedra technické a informační výchovy Digitální fotografie Zachycení obrazu za pomocí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2015 DAVID TĚTHAL ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ PROGRAM GEODÉZIE A KARTOGRAFIE OBOR GEODÉZIE, KARTOGRAFIE
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2015 DAVID TĚTHAL ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ PROGRAM GEODÉZIE A KARTOGRAFIE OBOR GEODÉZIE, KARTOGRAFIE
kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
 Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
Odstranění geometrických zkreslení obrazu Vstupní obraz pro naše úlohy získáváme pomocí optické soustavy tvořené objektivem a kamerou. Dle optických parametrů objektivu mohou v získaném obraze nastat geometrická
VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE
 VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE Obsah Úvod do fotogrammetrie Základy fotogrammetrie Rozdělení fotogrammetrie Letecká fotogrammetrie Úvod do fotogrammetrie
VŠB-TU Ostrava Referát do předmětu GIS Zpracoval: Petr Heinz DIGITÁLNÍ FOTOGRAMMETRIE Obsah Úvod do fotogrammetrie Základy fotogrammetrie Rozdělení fotogrammetrie Letecká fotogrammetrie Úvod do fotogrammetrie
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY
 MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 6) Snímání obrazu Petr Lobaz, 24. 3. 2009 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D MHS Snímání obrazu 2 / 41 ZPRACOVÁNÍ OBRAZU pořízení
MULTIMEDIÁLNÍ A HYPERMEDIÁLNÍ SYSTÉMY 6) Snímání obrazu Petr Lobaz, 24. 3. 2009 OBRAZOVÁ DATA OBRAZ statický dynamický bitmapový vektorový popis 2D 3D MHS Snímání obrazu 2 / 41 ZPRACOVÁNÍ OBRAZU pořízení
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Základy digitální fotografie
 Základy digitální fotografie Lekce 2 PROJEKT financovaný z Operačního programu Vzdělávání pro konkurenceschopnost ZVYŠOVÁNÍ IT GRAMOTNOSTI ZAMĚSTNANCŮ VYBRANÝCH FAKULT MU Registrační číslo: CZ.1.07/2.2.00/15.0224
Základy digitální fotografie Lekce 2 PROJEKT financovaný z Operačního programu Vzdělávání pro konkurenceschopnost ZVYŠOVÁNÍ IT GRAMOTNOSTI ZAMĚSTNANCŮ VYBRANÝCH FAKULT MU Registrační číslo: CZ.1.07/2.2.00/15.0224
iphone 7 a Canon 70D Pavel Kocur úterý 18. října 2016
 iphone 7 a Canon 70D Pavel Kocur úterý 18. října 2016 K napsání tohoto příspěvku mě inspiroval článek Vyrovná se mobil kvalitou výstupu zrcadlovce? Víta Kovalčíka ze dne 10. 10. 2016. V části TŘETÍ SCÉNA
iphone 7 a Canon 70D Pavel Kocur úterý 18. října 2016 K napsání tohoto příspěvku mě inspiroval článek Vyrovná se mobil kvalitou výstupu zrcadlovce? Víta Kovalčíka ze dne 10. 10. 2016. V části TŘETÍ SCÉNA
Kontrola svislosti montované budovy
 1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
Základy digitální fotografie
 Číslo projektu CZ.1.07/1.5.00/34.0036 Tématický celek Inovace výuky ICT na BPA Název projektu Inovace a individualizace výuky Název materiálu Číslo materiálu VY_32_INOVACE_FIL15 Ročník První Název školy
Číslo projektu CZ.1.07/1.5.00/34.0036 Tématický celek Inovace výuky ICT na BPA Název projektu Inovace a individualizace výuky Název materiálu Číslo materiálu VY_32_INOVACE_FIL15 Ročník První Název školy
M I K R O S K O P I E
 Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Laserové skenování (1)
") (1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
(1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
GEODÉZIE II. Metody určov. Geometrická nivelace ze středu. vzdálenost
 Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Digitální fotogrammetrie
 Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
Osnova prezentace Definice Sběr dat Zpracování dat Metody Princip Aplikace Definice Fotogrammetrie je umění, věda a technika získávání informací o fyzických objektech a prostředí skrz proces zaznamenávání,
Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy
 Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy Jakub Havlíček Katedra geomatiky Fakulta stavební ČVUT v Praze Dep. of Geomatics, www.company.com FCE Obsah 1. Vícelistová
Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy Jakub Havlíček Katedra geomatiky Fakulta stavební ČVUT v Praze Dep. of Geomatics, www.company.com FCE Obsah 1. Vícelistová
Program Denoiser v1.4 (10.11.2012)
") Program Denoiser v1.4 (10.11.2012) doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Anotace Program pro potlačení šumu v datech 3D skenování na základě využití okolních dat prokládáním bivariantními
Program Denoiser v1.4 (10.11.2012) doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Anotace Program pro potlačení šumu v datech 3D skenování na základě využití okolních dat prokládáním bivariantními
Vytyčovací sítě. Výhody: Přizpůsobení terénu
 Typ liniové sítě záleží na požadavcích na přesnost. Mezi tyto sítě patří: polygonové sítě -> polygonový pořad vedený souběžně s liniovou stavbou troj a čtyřúhelníkové řetězce -> zdvojený polygonový pořad
Typ liniové sítě záleží na požadavcích na přesnost. Mezi tyto sítě patří: polygonové sítě -> polygonový pořad vedený souběžně s liniovou stavbou troj a čtyřúhelníkové řetězce -> zdvojený polygonový pořad
BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK
 GNSS SEMINÁŘ 2018 BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK 21. ročník semináře Družicové metody v geodézii a katastru Brno, GNSS SEMINÁŘ 2018 Úvod Problematika:
GNSS SEMINÁŘ 2018 BUDOVÁNÍ PŘESNÉHO BODOVÉHO POLE A GEOMETRICKÉ VLASTNOSTI VIRTUÁLNÍCH REALIZACÍ S-JTSK 21. ročník semináře Družicové metody v geodézii a katastru Brno, GNSS SEMINÁŘ 2018 Úvod Problematika:
Základní nastavení. Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010
 13.12.2010") Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Základní nastavení Petr Novák (novace@labe.felk.cvut.cz) 13.12.2010 Všechny testy / moduly používají určité základní nastavení. Toto základní nastavení se vyvolá stiskem tlačítka Globální / základní konfigurace
Soubor programových modulů pro blízkou fotogrammetrii
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební katedra geomatiky Thákurova 7, 166 29 Praha 6 Soubor programových modulů pro blízkou fotogrammetrii Manuál k programu pro potlačení distorze objektivů
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební katedra geomatiky Thákurova 7, 166 29 Praha 6 Soubor programových modulů pro blízkou fotogrammetrii Manuál k programu pro potlačení distorze objektivů
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE DŮM U KAMENNÉHO ZVONU (PRAHA) - MĚŘICKÁ DOKUMENTACE ČÁSTI SKLEPENÍ Vedoucí práce: Ing. Jindřich HODAČ,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE DŮM U KAMENNÉHO ZVONU (PRAHA) - MĚŘICKÁ DOKUMENTACE ČÁSTI SKLEPENÍ Vedoucí práce: Ing. Jindřich HODAČ,
K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR
 K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR Vlastimil Kratochvíl * Příspěvek obsahuje popis vlastností některých postupů, využitelných pro transformaci souřadnic mezi geodetickými systémy
K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR Vlastimil Kratochvíl * Příspěvek obsahuje popis vlastností některých postupů, využitelných pro transformaci souřadnic mezi geodetickými systémy
Přehled vhodných metod georeferencování starých map
 Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Gymnázium Vincence Makovského se sportovními třídami Nové Město na Moravě
 VY_32_INOVACE_INF_BU_01 Sada: Digitální fotografie Téma: Princip, kategorie digitálů Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití: Prezentace
VY_32_INOVACE_INF_BU_01 Sada: Digitální fotografie Téma: Princip, kategorie digitálů Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití: Prezentace